
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体
【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体の技術分野に属する。より詳細には、被搬送物を搬送する自走式の走行体を制御する走行体制御装置及び走行体制御方法、並びに当該走行体制御装置用の走行体制御プログラム及び当該走行体制御プログラムが記録された記録媒体の技術分野に属する。
【背景技術】
【0002】
近年、電子機器等の製造工程の効率化等を図るべく、当該製造工程の自動化が進められており、これに伴って当該自動化についての研究開発も盛んである。この自動化についての研究開発の一つとして、自走式のスタッカクレーンに被搬送物を搭載して走行させることにより、複数の製造工程間における被搬送物の搬送を自動化することについての研究開発が進められている。この搬送の自動化についての従来技術として、例えば下記特許文献1に開示されている技術がある。
【0003】
この特許文献1に開示されている技術では、スタッカクレーンの搬送台に加わる振動加速度を加速度計により検出し、検出された振動加速度の値を正常時の値と比較し、振動加速度の値が既定の閾値以上に大きい場合にスタッカクレーンの異常と判断して、その走行動作を停止して警報を発生する構成とされている。即ち特許文献1に記載されている技術は、スタッカクレーン自体の故障や不具合の発生を未然に防止するための技術であると言える。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−265884号公報(第1図、第2図等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したような被搬送物の搬送の自動化において最も重要なことは、言うまでもなく被搬送物自体における損傷や破損の発生を防止することであり、スタッカクレーン自体の故障や不具合の発生を未然に防止することではない。この点、上記特許文献1には、被搬送物の損傷や破損を防止することに関する直接の記載は、見当たらない。よって特許文献1に開示されている技術を用いても、スタッカクレーンにより搬送されている被搬送物の損傷や破損を防止することはできないと考えられる。
【0006】
また、特許文献1に開示されている技術においてスタッカクレーン自体に異常の可能性ありと判定される程度の大きな振動が発生した場合、当然ながら被搬送物は既に損傷を受け又は破損してしまっていると考えられる。この点でも、特許文献1に開示されている技術において被搬送物の損傷や破損を防止することが考慮されているとは、考え難い。
【0007】
更に、被搬送物が損傷や破損したまま出荷されてしまうと、その被搬送物が例えばその出荷後に他の製品の一部品として用いられるような場合には、被搬送物の損傷や破損が当該他の製品自体の故障や不具合の原因になる場合がある。そしてこの場合には、例えば被搬送物の製造/出荷者が莫大な損害賠償を請求されるといった事態に発展する可能性もある。
【0008】
そこで、本発明は上記の各問題点等に鑑みて為されたもので、その課題の一例は、被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置及び走行体制御方法、並びに当該走行体制御装置用の走行体制御プログラム及び当該走行体制御プログラムが記録された記録媒体を提供することにある。
【課題を解決するための手段】
【0009】
上記の課題を解決するために請求項1に記載の発明は、ガラス板等の被搬送物を搬送する自走式のスタッカクレーン等の走行体を制御する走行体制御装置において、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶するメモリ等の態様情報記憶手段と、前記走行体への前記被搬送物の搭載の有無を検出する重量検出部等の搭載検出手段と、前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出部等の振動検出手段と、前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更する制御部等の変更手段と、を備える。
【0010】
上記の課題を解決するために請求項12に記載の発明は、ガラス板等の被搬送物を搬送する自走式のスタッカクレーン等の走行体を制御する走行体制御装置であって、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶するメモリ等の態様情報記憶手段を備える走行体制御装置において実行される走行体制御方法であって、前記走行体への前記被搬送物の搭載の有無を検出する搭載検出工程と、前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出工程と、前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御工程と、を含む。
【0011】
上記の課題を解決するために請求項13に記載の発明は、ガラス板等の被搬送物を搬送する自走式のスタッカクレーン等の走行体を制御する走行体制御装置に含まれるコンピュータを、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段、前記走行体への前記被搬送物の搭載の有無を検出する搭載検出手段、前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出手段、及び、前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御手段、として機能させる。
【0012】
請求項1、請求項12又は請求項13のいずれか一項に記載の発明によれば、走行体への被搬送物の搭載及び走行に起因する被搬送物の振動の発生が共に検出されたときの走行体の走行態様を、被搬送物の損傷を防止可能な走行態様に変更するので、被搬送物の損傷を防止しつつ被搬送物を搬送することができる。
【0013】
上記の課題を解決するために請求項2に記載の発明は、請求項1に記載の走行体制御装置において、前記被搬送物の搭載及び前記振動の発生が共に検出されたタイミングから計時を開始するタイマ等の計時手段を更に備え、前記変更手段は、前記被搬送物の搭載及び前記振動の発生が共に検出された後、予め設定された一定時間前記振動の発生が継続したとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更するように構成される。
【0014】
請求項2に記載の発明によれば、請求項1に記載の発明の作用に加えて、被搬送物の搭載及び振動の発生が共に検出された後、一定時間振動の発生が継続したときに走行体の走行態様を変更するので、走行体による被搬送物の搬送の実情に合わせて確実に被搬送物の損傷を防止することができる。
【0015】
上記の課題を解決するために請求項3に記載の発明は、請求項1又は請求項2に記載の走行体制御装置において、前記態様情報は、前記振動の発生が検出される前に比べて前記走行体を減速させる走行態様を示すように構成される。
【0016】
請求項3に記載の発明によれば、請求項1又は請求項2に記載の発明の作用に加えて、振動の発生が検出される前に比べて走行体が減速されるので、確実に被搬送物の損傷を防止することができる。
【0017】
上記の課題を解決するために請求項4に記載の発明は、請求項3に記載の走行体制御装置において、前記態様情報は、前記走行体を減速させた後に停止させる走行態様を示すように構成される。
【0018】
請求項4に記載の発明によれば、請求項3に記載の発明の作用に加えて、減速された後に走行体が停止されるので、更に確実に被搬送物の損傷を防止することができる。
【0019】
上記の課題を解決するために請求項5に記載の発明は、請求項3に記載の走行体制御装置において、前記態様情報は、前記走行体を減速させた後に、当該走行体の目的地を、前記被搬送物の検査工程が行われている位置又は当該被搬送物の廃棄工程が行われている位置の少なくともいずれか一方に変更して当該走行体を走行させる走行態様を示すように構成される。
【0020】
請求項5に記載の発明によれば、請求項3に記載の発明の作用に加えて、走行体が減速された後に、被搬送物の検査工程が行われている位置又は廃棄工程が行われている位置の少なくともいずれか一方に走行体の目的地が変更されるので、損傷している可能性のある被搬送物の検査又は廃棄を迅速に行うことができる。
【0021】
上記の課題を解決するために請求項6に記載の発明は、請求項1から請求項5のいずれか一項に記載の走行体制御装置において、前記走行体の走行態様が前記記憶されている態様情報により示される走行態様に変更されたとき、前記被搬送物に損傷が発生する可能性を示す警報を告知する警報部等の警報告知手段を更に備える。
【0022】
請求項6に記載の発明によれば、請求項1から請求項5のいずれか一項に記載の発明の作用に加えて、走行体の走行態様が態様情報により示される走行態様に変更されたとき、被搬送物に損傷が発生する可能性を示す警報を告知するので、当該損傷の発生の可能性を周囲の者に迅速に認識させることができる。
【0023】
上記の課題を解決するために請求項7に記載の発明は、請求項1から請求項6のいずれか一項に記載の走行体制御装置において、前記振動検出手段における前記振動の検出に用いられる振動閾値であって、前記被搬送物の重量に対応した値の振動閾値を示す閾値情報を記憶するメモリ等の閾値情報記憶手段と、前記被搬送物の搭載が検出されている場合に、当該搭載されている被搬送物の重量を検出する重量検出部等の重量検出手段と、を更に備え、前記被搬送物の搭載が検出されている場合において前記振動検出手段は、前記検出された重量に対応した値の前記振動閾値を用いて前記振動が発生しているか否かを検出するように構成される。
【0024】
請求項7に記載の発明によれば、請求項1から請求項6のいずれか一項に記載の発明の作用に加えて、被搬送物の搭載が検出されている場合にその重量を検出し、検出された重量に対応した値の振動閾値を用いて被搬送物に振動が発生しているか否かを検出するので、損傷発生の原因となる振動を、被搬送物の重量に応じて適切に検出することができる。
【0025】
上記の課題を解決するために請求項8に記載の発明は、請求項1から請求項7のいずれか一項に記載の走行体制御装置において、前記振動検出手段は、前記走行体に搭載された前記被搬送物における鉛直方向に平行な方向に発生する加速度を検出することにより前記振動を検出するように構成される。
【0026】
請求項8に記載の発明によれば、請求項1から請求項7のいずれか一項に記載の発明の作用に加えて、被搬送物の損傷の主原因となる鉛直方向に平行な方向に発生する加速度のみを検出する簡易な構成の振動検出手段により振動を検出することで、簡易な構成の振動検出手段を用いて被搬送物の損傷を効果的に防止することができる。
【0027】
上記の課題を解決するために請求項9に記載の発明は、請求項1から請求項8のいずれか一項に記載の走行体制御装置において、前記被搬送物の搭載が検出されない場合において前記制御手段は、最大可能速度により前記走行体を走行させるように構成される。
【0028】
請求項9に記載の発明によれば、請求項1から請求項8のいずれか一項に記載の発明の作用に加えて、被搬送物の搭載が検出されない場合に、最大可能速度により走行体を走行させるので、次の被搬送物の搬送等を迅速に開始することができる。
【0029】
上記の課題を解決するために請求項10に記載の発明は、請求項1から請求項9のいずれか一項に記載の走行体制御装置において、前記制御手段は複数の前記走行体の制御をそれぞれ行うと共に、一の前記走行体について前記被搬送物の搭載及び前記振動の発生が共に検出された位置を走行した他の前記走行体に搭載されていた前記被搬送物についても前記損傷の可能性がある旨の告知を行う警報部等の告知手段を更に備える。
【0030】
請求項10に記載の発明によれば、請求項1から請求項9のいずれか一項に記載の発明の作用に加えて、複数の走行体の制御をそれぞれ行う場合に、一の走行体について被搬送物の搭載及び振動の発生が共に検出された位置を走行した他の走行体に搭載されていた被搬送物についても損傷の可能性がある旨の告知を行うので、複数の走行体にそれぞれ搭載されている被搬送物における損傷の発生を迅速に認識することができる。
【0031】
上記の課題を解決するために請求項11に記載の発明は、請求項1から請求項10のいずれか一項に記載の走行体制御装置において、前記走行体は前記被搬送物を搭載して走行する自走式のスタッカクレーンであるように構成される。
【0032】
請求項11に記載の発明によれば、請求項1から請求項10のいずれか一項に記載の発明の作用に加えて、走行体が自走式のスタッカクレーンであるので、自走式のスタッカクレーンを用いた被搬送物の搬送において当該被搬送物の損傷を防止しつつ搬送することができる。
【0033】
上記の課題を解決するために請求項14に記載の発明は、請求項13に記載の前記走行体制御プログラムが、前記コンピュータにおいて読み取り可能に記録されている。
【0034】
請求項14に記載の発明によれば、当該走行体制御プログラムを当該コンピュータで読み出させて実行させることにより、走行体への被搬送物の搭載及び走行に起因する被搬送物の振動の発生が共に検出されたときの走行体の走行態様を、被搬送物の損傷を防止可能な走行態様に変更するように当該コンピュータが機能するので、被搬送物の損傷を防止しつつ被搬送物を搬送することができる。
【発明の効果】
【0035】
本発明によれば、被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することができる。
【図面の簡単な説明】
【0036】
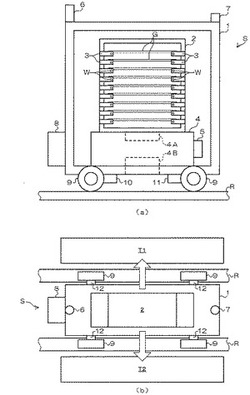
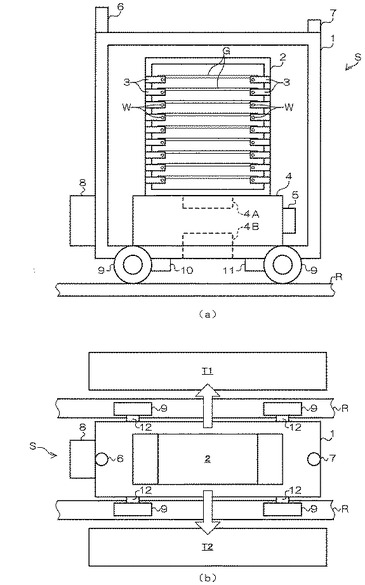
【図1】実施形態に係るスタッカクレーンの外観図であり、(a)は側面外観図であり、(b)は上面外観図である。
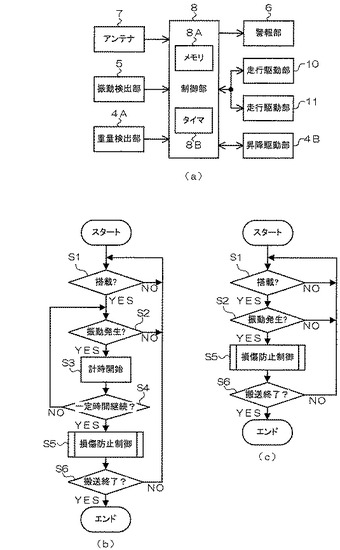
【図2】実施形態及び変形形態に係るスタッカクレーンを示す図であり、(a)は当該スタッカクレーンにおける制御系の構成を示すブロック図であり、(b)はスタッカクレーンにおける実施形態に係る動作を示すフローチャートであり、(c)はスタッカクレーンにおける変形形態に係る動作を示すフローチャートである。
【発明を実施するための形態】
【0037】
次に、本発明を実施するための形態について、図1及び図2を用いて説明する。なお以下に説明する実施形態は、例えばガラス板等の板状の被搬送物を複数枚同時に搬送する走行体の一例としての自走式のスタッカクレーンの動作制御に対して、本発明を適用した場合の実施形態である。また、図1は実施形態に係るスタッカクレーンの外観図であり、図2は実施形態及び変形形態に係るスタッカクレーンを示す図である。
【0038】
図1に示すように実施形態に係るスタッカクレーンSは、予め敷設されているレールR上を図1中左右方向に自走しつつ、被搬送物の一例としてのガラス板Gを搬送する。このガラス板Gは、例えば液晶パネルの部品の一つとして用いられるガラス板である。一枚のガラス板Gの寸法については、厚さが例えば0.6ミリメートル、大きさが例えば縦2,000ミリメートル×横1,800ミリメートル、重さが例えば一枚当たり約10キログラムである。そしてスタッカクレーンSは、レールRの両脇に設置されている例えば保管用の棚T1又は棚T2の前で自動で停止し、搬送して来たガラス板Gを棚T1又は棚T2に対して自動で出し入れする。このガラス板Gの出し入れのためには、例えば図示しないフォーク機構が用いられる。
【0039】
具体的に図1(a)に示すように、実施形態に係るスタッカクレーンSは、スタッカクレーンS自体の筐体1の内側に搬送台4を備える。搬送対象たるガラス板Gは搬送台4上に複数枚搭載されて搬送される。そして筐体1の床下部に車軸12を介して取り付けられた車輪9が走行駆動部10及び走行駆動部11により回転駆動されることにより、スタッカクレーンS全体としてレールR上を自走する。
【0040】
このとき実施形態に係るスタッカクレーンSにおいて、ガラス板Gは、図1(a)に示すように、例えば「カセット」と称される搬送具2を用いて搬送台4上に搭載される。具体的に各ガラス板Gは、スタッカクレーンSの走行方向(図1中左右方向)に対して搬送具2における前後方向の内壁に鉛直方向にそれぞれ対向して複数段並べて形成されている支持部3の先端に備えられた搬送ワイヤW上に載置される。各搬送ワイヤWは、図1(a)においては図中奥行き方向に、図1(b)においては図中上下方向に張られていることになる。対向した位置にある一対の搬送ワイヤW上にガラス板Gが載置されて搬送されることにより、ガラス板Gが安全に搬送されると共に、ガラス板Gに対してそれを支持する支持部材(実施形態に係るスタッカクレーンSの場合は搬送ワイヤW)との接触面積が最小化される。これにより、ガラス板Gにおける当該支持部材との接触部が搬送時の振動等により損傷する(キズがつく)ことを最小限に抑制するのである。
【0041】
一方、実施形態に係るスタッカクレーンSの搬送台4には、それに搭載されている搬送具2及びガラス板Gにおける振動の発生を検出する振動検出手段の一例としての振動検出部5と、搬送台4ごと搬送具2及びガラス板Gを昇降させる昇降駆動部4Bと、ガラス板Gを含む搬送具2の重量を検出する搭載検出手段の一例及び重量検出手段の一例としての重量検出部4Aと、が設けられている。このうち昇降駆動部4B及び重量検出部2Aとは、例えば搬送台4の内部に設けられている。また振動検出部5としては、三軸の加速度計を用いることが可能であるが、少なくとも搬送時のガラス板Gにおける鉛直方向に平行な方向(即ち、図1(a)において図中上下方向)の加速度を検出する加速度計であれば足りる。
【0042】
これらに加えて実施形態に係るスタッカクレーンSは、スタッカクレーンSの走行についてのデータを図示しない中央制御装置から無線を介して取得するためのアンテナ7と、重量検出部4Aにより検出された重量及び振動検出部5により検出された振動の状況に基づいて実施形態に係るスタッカクレーンSとしての後述する動作を制御する変更手段の一例としての制御部8と、当該動作において警報が告知される警報告知手段の一例及び告知手段の一例としての警報部6と、を備える。この構成においてアンテナ7を介して取得される上記データには、スタッカクレーンSとしての行き先(換言すれば、ガラス板Gの搬送先)を示す行き先データや、走行時の走行方向や走行速度を示す走行データ等が含まれており、これらに基づいて制御部8は、走行駆動部10及び走行駆動部11を制御して実施形態に係るスタッカクレーンSとしての動作(走行)を制御する。またこれらのデータは、アンテナ7を介して必要なタイミングで取得される場合の他、後述するメモリ8A内に予め記憶されていてもよい。
【0043】
次に、実施形態に係るスタッカクレーンSの動作を制御する制御系の構成について、図2(a)を用いて説明する。なお図2(a)は当該制御系の構成を示すブロック図である。
【0044】
図2(a)に示すように、実施形態に係るスタッカクレーンSの制御部8には、重量検出部4Aによるガラス板Gを含む搬送具2の重量の検出結果と、振動検出部5による搬送具2及びガラス板Gにおける振動の検出結果と、が入力される。また制御部8内の態様情報記憶手段の一例及び閾値情報記憶手段の一例としてのメモリ8Aには、振動検出部5からの振動の検出結果を用いて当該振動の発生の有無を検出する際に用いられる振動振幅閾値を示す閾値データと、ガラス板Gを除いた搬送具2自体の重量を示す重量データと、が、予め不揮発性に記憶されている。この場合の閾値データは、搬送されるガラス板Gの重量に対応した複数種類の閾値データであり、例えば、ある重量に対応した閾値データにより示される振動振幅以上の振幅の振動がその重量のガラス板Gに発生している場合、そのガラス板Gの、特に搬送ワイヤWとの接触部に損傷が発生する可能性があると判定される。また当該閾値データは、重量が重いガラス板Gほど小さい振動振幅を示す閾値データである。この閾値データとしての振動振幅は、例えば、搬送されるガラス板Gの硬度及び重量やガラス板Gが載置される搬送ワイヤWの表面荒さ、又はガラス板Gに発生する振動の強さの経験値等に基づき、実験的又は経験的にガラス板Gの重量ごとに予め設定され、当該設定された振動振幅を示す閾値データが上記メモリ8Aに記憶されている。
【0045】
これらに加えてメモリ8Aには、搬送具2及びガラス板Gに振動が発生している場合におけるスタッカクレーンSの動作を制御するため動作制御データと、上記アンテナ7を介して取得された行き先を示す行き先データ等と、が記憶される。このとき当該動作制御データとしては、例えば後述する動作において、スタッカクレーンSの速度を上記走行データにより示される通常の走行速度から減速させる制御を示すデータが記憶される。また当該動作制御データは、予めメモリ8Aに記憶されていてもよいし、上記行き先データ等と同様にアンテナ7を介して必要なタイミングで取得されてもよい。
【0046】
これらに基づいて制御部8は、走行駆動部10及び走行駆動部11を制御してスタッカクレーンS自体を走行させてガラス板Gを搬送すると共に、昇降駆動部4Bを制御して搬送具2及びガラス板Gを昇降させ、更に必要な場合に警報部6を用いて、ガラス板Gにおける損傷の発生の可能性を示す警報を告知する。この警報部6における告知は、例えば点滅するランプ又は警報音等を用いて行われる。
【0047】
次に、上述してきた構成を備えるスタッカクレーンSにおける実施形態に係る動作を、具体的に図2(b)を用いて説明する。なお図2(b)は当該動作を示すフローチャートである。
【0048】
図2(b)に示すように、スタッカクレーンSにおける実施形態に係る動作として、先ず制御部8は、搬送台4上に搬送具2を含むガラス板Gが搭載されているか否かを、重量検出部4Aによるガラス板Gを含む搬送具2の重量の検出結果に基づいて判定する(ステップS1)。具体的に制御部8は、メモリ8Aに記憶されている上記重量データにより示されている搬送具2自体の重量を重量検出部4Aからの検出結果から差し引き、その結果がガラス板G一枚分の重量以上であれば、搬送台5上に少なくとも一枚のガラス板Gが搭載されていると判定する。なお、当該ガラス板G一枚分の重量を示すデータは、メモリ8A内に予め記憶されていてもよいし、アンテナ7を介して必要なタイミングで取得されてもよい。
【0049】
ステップS1の判定においてガラス板Gが搭載されていないと判定された場合(ステップS1;NO)、制御部8は例えば所定時間間隔ごとにステップS1の判定を繰り返す。一方ステップS1の判定においてガラス板Gが搭載されていると判定された場合(ステップS1;YES)、制御部8は次に、振動検出部5による搬送具2及びガラス板Gにおける振動の検出結果に基づいて、ガラス板Gに振動が発生しているか否かを判定する(ステップS2)。具体的に制御部8は、振動検出部5からの検出結果としての振動の振幅と、上記ステップS1の動作により検出されているガラス板Gの重量に対応する上記閾値データと、を比較し、当該検出結果としての振動の振幅が、対応する閾値データにより示される振動の振幅以上である場合、ガラス板Gに振動が発生していると判定する。ステップS2の判定においてガラス板Gに振動が発生していないと判定された場合(ステップS2;NO)、制御部8は例えば所定時間間隔ごとにステップS1の判定を繰り返す。一方ステップS2の判定においてガラス板Gに振動が発生していると判定された場合(ステップS2;YES)、制御部8は次に、制御部8内の計時手段の一例としてのタイマ8Bにおける計時を開始する(ステップS3)。その後制御部8は、当該タイマ8Bにおいて予め設定された一定時間、ガラス板Gの振動が継続したか否かを判定する(ステップS4)。このときステップS4における判定の基準となる一定時間は、例えば、搬送されるガラス板Gの硬度やガラス板Gが載置される搬送ワイヤWの表面荒さ・硬度、又はガラス板Gに発生する振動の強さの経験値等に基づき、実験的又は経験的に予め設定され、当該設定された一定時間を示す情報が上記メモリ8Aに記憶されているものである。制御部8は当該記憶されている情報を読み出して上記ステップS4の判定を行う。
【0050】
ステップS4の判定において一定時間当該振動が継続していない場合、即ち、当該一定時間の経過前に当該振動が停止した場合(ステップS4;NO)、制御部8は、当該振動の再度の発生を監視すべく、上記ステップS2の判定に移行する。一方ステップS4の判定において一定時間当該振動が継続した場合(ステップS4;YES)、制御部8は、ガラス板Gの振動(特に鉛直方向に平行な方向の振動)により、例えばガラス板Gにおける搬送ワイヤWとの接触部が損傷する(キズがつく)可能性があるとして、スタッカクレーンSにおける損傷防止制御を行う(ステップS5)。即ち、ガラス板Gの損傷を防止するためにスタッカクレーンSの走行態様を制御する。このステップS5の損傷防止制御として具体的に制御部8は、例えば、メモリ8Aに記憶されている上記動作制御データに基づき、スタッカクレーンSの速度を上記走行データにより示される通常の走行速度から減速させる制御を行う。なお制御部8は、上記動作制御データに基づいて、当該減速後、更にスタッカクレーンSを停止させるように制御してもよい。これらと並行して制御部8は、警報部6を用いてガラス板Gにおける損傷の発生を示す警報を告知する。
【0051】
その後制御部8は、例えばスタッカクレーンSが上記行き先データにより示される行き先に到達したことでガラス板Gの搬送を終了するか否かを判定する(ステップS6)。ステップS6の判定において、いまだ当該行き先に到達していないとしてガラス板Gの搬送をまだ終了しない場合(ステップS6;NO)、制御部8は、上記ステップS1に戻って上述してきた動作を繰り返す。一方ステップS6の判定においてガラス板Gの搬送を終了する場合(ステップS6;YES)、制御部8は、スタッカクレーンSにおける実施形態に係る動作を終了する。
【0052】
なお、スタッカクレーンSにおける実施形態に係る動作を終了した場合において、それまで搬送して来たガラス板Gを積み下ろした後、制御部8は、例えばスタッカクレーンSにおける走行の最大可能速度により、次の搬送開始位置までスタッカクレーンSを走行させる。またこれに加えて制御部8は、ガラス板Gを搭載していない場合については全て、当該最大可能速度によりスタッカクレーンSを走行させるように構成することもできる。
【0053】
以上説明したように、スタッカクレーンSにおける実施形態に係る動作によれば、スタッカクレーンSへのガラス板Gの搭載及びその走行に起因するガラス板Gの振動の発生が共に検出された後、既定の一定時間振動の発生が継続したときにスタッカクレーンSを減速させるので、ガラス板Gの損傷を防止しつつガラス板Gを搬送することができる。
【0054】
また、既定の一定時間振動の発生が継続したときにスタッカクレーンSを減速させるので、スタッカクレーンSによるガラス板Gの搬送の実情に合わせて、確実にガラス板Gの損傷を防止することができる。
【0055】
更に、減速された後にスタッカクレーンSが停止される場合には、更に確実にガラス板Gの損傷を防止することができる。また、減速した後にスタッカクレーンSが停止されるので、スタッカクレーンSが急停止することによるガラス板Gの損傷を防止できる。
【0056】
更にまた、スタッカクレーンSの減速等に伴ってガラス板Gに損傷が発生する可能性を示す警報を告知するので、当該損傷の発生の可能性を周囲の者に迅速に認識させることができる。
【0057】
また、ガラス板Gの搭載が検出されている場合にその重量を検出し、検出された重量に対応した値の振動振幅の閾値データを用いてガラス板Gに振動が発生しているか否かを検出するので、損傷発生の原因となる振動を、ガラス板Gの重量に応じて適切に検出することができる。
【0058】
更に、ガラス板Gの損傷の主原因となる鉛直方向に平行な方向に発生する加速度を少なくとも検出する簡易な構成の振動検出部5により振動を検出することで、簡易な構成の振動検出部5を用いてガラス板Gの損傷を効果的に防止することができる。
【0059】
更にまた、ガラス板Gの搭載が検出されない場合に、最大可能速度によりスタッカクレーンSを走行させるので、次のガラス板Gの搬送等を迅速に開始することができる。
【0060】
また、スタッカクレーンSが自走式のスタッカクレーンSであるので、自走式のスタッカクレーンSを用いたガラス板Gの搬送において当該ガラス板Gの損傷を防止しつつ搬送することができる。
【0061】
なお、上述した実施形態では、スタッカクレーンSに対するガラス板Gの搭載及び走行に起因するガラス板Gの振動の発生が共に検出された後、一定時間その振動が継続した場合にスタッカクレーンSを減速等させることとした。しかしながらこの他に、本発明に係る変形形態として図2(b)に示すように、ガラス板Gの搭載及び走行に起因するガラス板Gの振動の発生が共に検出されたとき(ステップS1;YES及びステップS2;YES)、直ちに上記ステップS5に係る損傷防止制御に移行するように構成することもできる。この場合には、ガラス板Gに損傷が発生している可能性が少しでもあればそれを防止するようにスタッカクレーンSの減速等を行うことで、確実に板ガラスGの損傷を防止することができる。
【0062】
また、上記実施形態及び変形形態に係るステップS5の損傷防止制御においては、スタッカクレーンSを減速させ、或いは減速後に停止させるように構成したが、これ以外に、当該減速後に、スタッカクレーンSの目的地(ガラス板Gの搬送先)を、ガラス板Gの検査工程が行われている位置又はガラス板Gの廃棄工程が行われている位置の少なくともいずれか一方に変更してスタッカクレーンSを走行させるように制御してもよい。この場合には、ガラス板Gの損傷の可能性がある場合に、その検査工程が行われている位置又は廃棄工程が行われている位置の少なくともいずれか一方にスタッカクレーンSの目的地が変更されるので、損傷している可能性のあるガラス板Gの検査又は廃棄を迅速に行うことができる。
【0063】
更に、上記実施形態及び変形形態に係るスタッカクレーンSの動作においては、一台のスタッカクレーンSについて、ガラス板Gの損傷の可能性がある場合に当該スタッカクレーンSを減速させ、或いは減速後に停止させるように構成した。しかしながらこの他に、同一の走路を走行する複数のスタッカクレーンSを例えば上記図示しない中央制御装置において一元的に制御する場合において、一台のスタッカクレーンSについてガラス板Gの搭載及び振動の発生が共に検出された位置を走行した他のスタッカクレーンSに搭載されていたガラス板Gについて、その損傷の可能性がある旨の告知を、例えば当該他のスタッカクレーンSの警報部6や上記図示しない中央制御装置における表示を用いて行うように構成することもできる。この場合には、一台のスタッカクレーンSについてガラス板Gの搭載及び振動の発生が共に検出された位置を走行した他のスタッカクレーンSに搭載されていたガラス板Gについても損傷の可能性がある旨の告知を行うので、複数のスタッカクレーンSにそれぞれ搭載されているガラス板Gにおける損傷の発生を迅速に認識することができる。
【0064】
更にまた、上述した実施形態及び変形形態においては、重量検出部4Aにおける重量の検出結果を用いて、ガラス板Gが搬送台4に搭載されているか否かの判定を行った。しかしながら、この重量検出部4Aを用いる方法以外に、例えば、接触式のスイッチによりガラス板Gの搭載の有無を直接検出するように構成することもできる。また例えば、ガラス板Gの搭載により遮断されるレーザ光等を用いた光学的なセンサを用いる方法により、ガラス板Gの搭載を直接検出するように構成することもできる。これらの場合には重量検出部4Aは不要となり、また振動検出部5における振動の検出に用いられる上記閾値データも、予め設定された一の閾値データとの比較により振動の発生を検出することになる。
【0065】
また、上述した実施形態及び変形形態では、スタッカクレーンSにより搬送される被搬送物としてガラス板Gについて例示したが、これ以外に、走行に起因する振動により損傷する可能性のある被搬送物であれば、当該被搬送物を搬送するスタッカクレーンSについて広く本発明を適用することが可能である。
【0066】
更に、上述した実施形態及び変形形態では、自走式のスタッカクレーンSの動作制御に対して本発明を適用したが、これ以外に、例えばつり下げ式のスタッカクレーンや、自走式のクレーン等の走行体の動作制御に対して本発明を広く適用することが可能である。
【0067】
更にまた、実施形態又は変形形態に係る制御部8の機能に対応するプログラムを、例えば光ディスク等の記録媒体に記録しておき、或いはインターネット等のネットワークから取得して記録しておき、これらを読み出して汎用のマイクロコンピュータ等により実行させることにより、当該マイクロコンピュータ等を、実施形態又は変形形態に係る制御部8として機能させることも可能である。
【産業上の利用可能性】
【0068】
以上それぞれ説明したように、本発明は走行体制御装置の分野に利用することが可能であり、特に容易に損傷する可能性のある被搬送物を搬送する走行体を制御する走行体制御装置の分野に適用すれば特に顕著な効果が得られる。
【符号の説明】
【0069】
1 筐体
2 搬送具
3 支持部
4 搬送台
4A 重量検出部
4B 昇降駆動部
5 振動検出部
6 警報部
7 アンテナ
8 制御部
8A メモリ
8B タイマ
9 車輪
10、11 走行駆動部
12 車軸
S スタッカクレーン
R レール
G ガラス板
W 搬送ワイヤ
T1、T2 棚
【技術分野】
【0001】
本発明は、走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体の技術分野に属する。より詳細には、被搬送物を搬送する自走式の走行体を制御する走行体制御装置及び走行体制御方法、並びに当該走行体制御装置用の走行体制御プログラム及び当該走行体制御プログラムが記録された記録媒体の技術分野に属する。
【背景技術】
【0002】
近年、電子機器等の製造工程の効率化等を図るべく、当該製造工程の自動化が進められており、これに伴って当該自動化についての研究開発も盛んである。この自動化についての研究開発の一つとして、自走式のスタッカクレーンに被搬送物を搭載して走行させることにより、複数の製造工程間における被搬送物の搬送を自動化することについての研究開発が進められている。この搬送の自動化についての従来技術として、例えば下記特許文献1に開示されている技術がある。
【0003】
この特許文献1に開示されている技術では、スタッカクレーンの搬送台に加わる振動加速度を加速度計により検出し、検出された振動加速度の値を正常時の値と比較し、振動加速度の値が既定の閾値以上に大きい場合にスタッカクレーンの異常と判断して、その走行動作を停止して警報を発生する構成とされている。即ち特許文献1に記載されている技術は、スタッカクレーン自体の故障や不具合の発生を未然に防止するための技術であると言える。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−265884号公報(第1図、第2図等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したような被搬送物の搬送の自動化において最も重要なことは、言うまでもなく被搬送物自体における損傷や破損の発生を防止することであり、スタッカクレーン自体の故障や不具合の発生を未然に防止することではない。この点、上記特許文献1には、被搬送物の損傷や破損を防止することに関する直接の記載は、見当たらない。よって特許文献1に開示されている技術を用いても、スタッカクレーンにより搬送されている被搬送物の損傷や破損を防止することはできないと考えられる。
【0006】
また、特許文献1に開示されている技術においてスタッカクレーン自体に異常の可能性ありと判定される程度の大きな振動が発生した場合、当然ながら被搬送物は既に損傷を受け又は破損してしまっていると考えられる。この点でも、特許文献1に開示されている技術において被搬送物の損傷や破損を防止することが考慮されているとは、考え難い。
【0007】
更に、被搬送物が損傷や破損したまま出荷されてしまうと、その被搬送物が例えばその出荷後に他の製品の一部品として用いられるような場合には、被搬送物の損傷や破損が当該他の製品自体の故障や不具合の原因になる場合がある。そしてこの場合には、例えば被搬送物の製造/出荷者が莫大な損害賠償を請求されるといった事態に発展する可能性もある。
【0008】
そこで、本発明は上記の各問題点等に鑑みて為されたもので、その課題の一例は、被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置及び走行体制御方法、並びに当該走行体制御装置用の走行体制御プログラム及び当該走行体制御プログラムが記録された記録媒体を提供することにある。
【課題を解決するための手段】
【0009】
上記の課題を解決するために請求項1に記載の発明は、ガラス板等の被搬送物を搬送する自走式のスタッカクレーン等の走行体を制御する走行体制御装置において、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶するメモリ等の態様情報記憶手段と、前記走行体への前記被搬送物の搭載の有無を検出する重量検出部等の搭載検出手段と、前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出部等の振動検出手段と、前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更する制御部等の変更手段と、を備える。
【0010】
上記の課題を解決するために請求項12に記載の発明は、ガラス板等の被搬送物を搬送する自走式のスタッカクレーン等の走行体を制御する走行体制御装置であって、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶するメモリ等の態様情報記憶手段を備える走行体制御装置において実行される走行体制御方法であって、前記走行体への前記被搬送物の搭載の有無を検出する搭載検出工程と、前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出工程と、前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御工程と、を含む。
【0011】
上記の課題を解決するために請求項13に記載の発明は、ガラス板等の被搬送物を搬送する自走式のスタッカクレーン等の走行体を制御する走行体制御装置に含まれるコンピュータを、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段、前記走行体への前記被搬送物の搭載の有無を検出する搭載検出手段、前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出手段、及び、前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御手段、として機能させる。
【0012】
請求項1、請求項12又は請求項13のいずれか一項に記載の発明によれば、走行体への被搬送物の搭載及び走行に起因する被搬送物の振動の発生が共に検出されたときの走行体の走行態様を、被搬送物の損傷を防止可能な走行態様に変更するので、被搬送物の損傷を防止しつつ被搬送物を搬送することができる。
【0013】
上記の課題を解決するために請求項2に記載の発明は、請求項1に記載の走行体制御装置において、前記被搬送物の搭載及び前記振動の発生が共に検出されたタイミングから計時を開始するタイマ等の計時手段を更に備え、前記変更手段は、前記被搬送物の搭載及び前記振動の発生が共に検出された後、予め設定された一定時間前記振動の発生が継続したとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更するように構成される。
【0014】
請求項2に記載の発明によれば、請求項1に記載の発明の作用に加えて、被搬送物の搭載及び振動の発生が共に検出された後、一定時間振動の発生が継続したときに走行体の走行態様を変更するので、走行体による被搬送物の搬送の実情に合わせて確実に被搬送物の損傷を防止することができる。
【0015】
上記の課題を解決するために請求項3に記載の発明は、請求項1又は請求項2に記載の走行体制御装置において、前記態様情報は、前記振動の発生が検出される前に比べて前記走行体を減速させる走行態様を示すように構成される。
【0016】
請求項3に記載の発明によれば、請求項1又は請求項2に記載の発明の作用に加えて、振動の発生が検出される前に比べて走行体が減速されるので、確実に被搬送物の損傷を防止することができる。
【0017】
上記の課題を解決するために請求項4に記載の発明は、請求項3に記載の走行体制御装置において、前記態様情報は、前記走行体を減速させた後に停止させる走行態様を示すように構成される。
【0018】
請求項4に記載の発明によれば、請求項3に記載の発明の作用に加えて、減速された後に走行体が停止されるので、更に確実に被搬送物の損傷を防止することができる。
【0019】
上記の課題を解決するために請求項5に記載の発明は、請求項3に記載の走行体制御装置において、前記態様情報は、前記走行体を減速させた後に、当該走行体の目的地を、前記被搬送物の検査工程が行われている位置又は当該被搬送物の廃棄工程が行われている位置の少なくともいずれか一方に変更して当該走行体を走行させる走行態様を示すように構成される。
【0020】
請求項5に記載の発明によれば、請求項3に記載の発明の作用に加えて、走行体が減速された後に、被搬送物の検査工程が行われている位置又は廃棄工程が行われている位置の少なくともいずれか一方に走行体の目的地が変更されるので、損傷している可能性のある被搬送物の検査又は廃棄を迅速に行うことができる。
【0021】
上記の課題を解決するために請求項6に記載の発明は、請求項1から請求項5のいずれか一項に記載の走行体制御装置において、前記走行体の走行態様が前記記憶されている態様情報により示される走行態様に変更されたとき、前記被搬送物に損傷が発生する可能性を示す警報を告知する警報部等の警報告知手段を更に備える。
【0022】
請求項6に記載の発明によれば、請求項1から請求項5のいずれか一項に記載の発明の作用に加えて、走行体の走行態様が態様情報により示される走行態様に変更されたとき、被搬送物に損傷が発生する可能性を示す警報を告知するので、当該損傷の発生の可能性を周囲の者に迅速に認識させることができる。
【0023】
上記の課題を解決するために請求項7に記載の発明は、請求項1から請求項6のいずれか一項に記載の走行体制御装置において、前記振動検出手段における前記振動の検出に用いられる振動閾値であって、前記被搬送物の重量に対応した値の振動閾値を示す閾値情報を記憶するメモリ等の閾値情報記憶手段と、前記被搬送物の搭載が検出されている場合に、当該搭載されている被搬送物の重量を検出する重量検出部等の重量検出手段と、を更に備え、前記被搬送物の搭載が検出されている場合において前記振動検出手段は、前記検出された重量に対応した値の前記振動閾値を用いて前記振動が発生しているか否かを検出するように構成される。
【0024】
請求項7に記載の発明によれば、請求項1から請求項6のいずれか一項に記載の発明の作用に加えて、被搬送物の搭載が検出されている場合にその重量を検出し、検出された重量に対応した値の振動閾値を用いて被搬送物に振動が発生しているか否かを検出するので、損傷発生の原因となる振動を、被搬送物の重量に応じて適切に検出することができる。
【0025】
上記の課題を解決するために請求項8に記載の発明は、請求項1から請求項7のいずれか一項に記載の走行体制御装置において、前記振動検出手段は、前記走行体に搭載された前記被搬送物における鉛直方向に平行な方向に発生する加速度を検出することにより前記振動を検出するように構成される。
【0026】
請求項8に記載の発明によれば、請求項1から請求項7のいずれか一項に記載の発明の作用に加えて、被搬送物の損傷の主原因となる鉛直方向に平行な方向に発生する加速度のみを検出する簡易な構成の振動検出手段により振動を検出することで、簡易な構成の振動検出手段を用いて被搬送物の損傷を効果的に防止することができる。
【0027】
上記の課題を解決するために請求項9に記載の発明は、請求項1から請求項8のいずれか一項に記載の走行体制御装置において、前記被搬送物の搭載が検出されない場合において前記制御手段は、最大可能速度により前記走行体を走行させるように構成される。
【0028】
請求項9に記載の発明によれば、請求項1から請求項8のいずれか一項に記載の発明の作用に加えて、被搬送物の搭載が検出されない場合に、最大可能速度により走行体を走行させるので、次の被搬送物の搬送等を迅速に開始することができる。
【0029】
上記の課題を解決するために請求項10に記載の発明は、請求項1から請求項9のいずれか一項に記載の走行体制御装置において、前記制御手段は複数の前記走行体の制御をそれぞれ行うと共に、一の前記走行体について前記被搬送物の搭載及び前記振動の発生が共に検出された位置を走行した他の前記走行体に搭載されていた前記被搬送物についても前記損傷の可能性がある旨の告知を行う警報部等の告知手段を更に備える。
【0030】
請求項10に記載の発明によれば、請求項1から請求項9のいずれか一項に記載の発明の作用に加えて、複数の走行体の制御をそれぞれ行う場合に、一の走行体について被搬送物の搭載及び振動の発生が共に検出された位置を走行した他の走行体に搭載されていた被搬送物についても損傷の可能性がある旨の告知を行うので、複数の走行体にそれぞれ搭載されている被搬送物における損傷の発生を迅速に認識することができる。
【0031】
上記の課題を解決するために請求項11に記載の発明は、請求項1から請求項10のいずれか一項に記載の走行体制御装置において、前記走行体は前記被搬送物を搭載して走行する自走式のスタッカクレーンであるように構成される。
【0032】
請求項11に記載の発明によれば、請求項1から請求項10のいずれか一項に記載の発明の作用に加えて、走行体が自走式のスタッカクレーンであるので、自走式のスタッカクレーンを用いた被搬送物の搬送において当該被搬送物の損傷を防止しつつ搬送することができる。
【0033】
上記の課題を解決するために請求項14に記載の発明は、請求項13に記載の前記走行体制御プログラムが、前記コンピュータにおいて読み取り可能に記録されている。
【0034】
請求項14に記載の発明によれば、当該走行体制御プログラムを当該コンピュータで読み出させて実行させることにより、走行体への被搬送物の搭載及び走行に起因する被搬送物の振動の発生が共に検出されたときの走行体の走行態様を、被搬送物の損傷を防止可能な走行態様に変更するように当該コンピュータが機能するので、被搬送物の損傷を防止しつつ被搬送物を搬送することができる。
【発明の効果】
【0035】
本発明によれば、被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することができる。
【図面の簡単な説明】
【0036】
【図1】実施形態に係るスタッカクレーンの外観図であり、(a)は側面外観図であり、(b)は上面外観図である。
【図2】実施形態及び変形形態に係るスタッカクレーンを示す図であり、(a)は当該スタッカクレーンにおける制御系の構成を示すブロック図であり、(b)はスタッカクレーンにおける実施形態に係る動作を示すフローチャートであり、(c)はスタッカクレーンにおける変形形態に係る動作を示すフローチャートである。
【発明を実施するための形態】
【0037】
次に、本発明を実施するための形態について、図1及び図2を用いて説明する。なお以下に説明する実施形態は、例えばガラス板等の板状の被搬送物を複数枚同時に搬送する走行体の一例としての自走式のスタッカクレーンの動作制御に対して、本発明を適用した場合の実施形態である。また、図1は実施形態に係るスタッカクレーンの外観図であり、図2は実施形態及び変形形態に係るスタッカクレーンを示す図である。
【0038】
図1に示すように実施形態に係るスタッカクレーンSは、予め敷設されているレールR上を図1中左右方向に自走しつつ、被搬送物の一例としてのガラス板Gを搬送する。このガラス板Gは、例えば液晶パネルの部品の一つとして用いられるガラス板である。一枚のガラス板Gの寸法については、厚さが例えば0.6ミリメートル、大きさが例えば縦2,000ミリメートル×横1,800ミリメートル、重さが例えば一枚当たり約10キログラムである。そしてスタッカクレーンSは、レールRの両脇に設置されている例えば保管用の棚T1又は棚T2の前で自動で停止し、搬送して来たガラス板Gを棚T1又は棚T2に対して自動で出し入れする。このガラス板Gの出し入れのためには、例えば図示しないフォーク機構が用いられる。
【0039】
具体的に図1(a)に示すように、実施形態に係るスタッカクレーンSは、スタッカクレーンS自体の筐体1の内側に搬送台4を備える。搬送対象たるガラス板Gは搬送台4上に複数枚搭載されて搬送される。そして筐体1の床下部に車軸12を介して取り付けられた車輪9が走行駆動部10及び走行駆動部11により回転駆動されることにより、スタッカクレーンS全体としてレールR上を自走する。
【0040】
このとき実施形態に係るスタッカクレーンSにおいて、ガラス板Gは、図1(a)に示すように、例えば「カセット」と称される搬送具2を用いて搬送台4上に搭載される。具体的に各ガラス板Gは、スタッカクレーンSの走行方向(図1中左右方向)に対して搬送具2における前後方向の内壁に鉛直方向にそれぞれ対向して複数段並べて形成されている支持部3の先端に備えられた搬送ワイヤW上に載置される。各搬送ワイヤWは、図1(a)においては図中奥行き方向に、図1(b)においては図中上下方向に張られていることになる。対向した位置にある一対の搬送ワイヤW上にガラス板Gが載置されて搬送されることにより、ガラス板Gが安全に搬送されると共に、ガラス板Gに対してそれを支持する支持部材(実施形態に係るスタッカクレーンSの場合は搬送ワイヤW)との接触面積が最小化される。これにより、ガラス板Gにおける当該支持部材との接触部が搬送時の振動等により損傷する(キズがつく)ことを最小限に抑制するのである。
【0041】
一方、実施形態に係るスタッカクレーンSの搬送台4には、それに搭載されている搬送具2及びガラス板Gにおける振動の発生を検出する振動検出手段の一例としての振動検出部5と、搬送台4ごと搬送具2及びガラス板Gを昇降させる昇降駆動部4Bと、ガラス板Gを含む搬送具2の重量を検出する搭載検出手段の一例及び重量検出手段の一例としての重量検出部4Aと、が設けられている。このうち昇降駆動部4B及び重量検出部2Aとは、例えば搬送台4の内部に設けられている。また振動検出部5としては、三軸の加速度計を用いることが可能であるが、少なくとも搬送時のガラス板Gにおける鉛直方向に平行な方向(即ち、図1(a)において図中上下方向)の加速度を検出する加速度計であれば足りる。
【0042】
これらに加えて実施形態に係るスタッカクレーンSは、スタッカクレーンSの走行についてのデータを図示しない中央制御装置から無線を介して取得するためのアンテナ7と、重量検出部4Aにより検出された重量及び振動検出部5により検出された振動の状況に基づいて実施形態に係るスタッカクレーンSとしての後述する動作を制御する変更手段の一例としての制御部8と、当該動作において警報が告知される警報告知手段の一例及び告知手段の一例としての警報部6と、を備える。この構成においてアンテナ7を介して取得される上記データには、スタッカクレーンSとしての行き先(換言すれば、ガラス板Gの搬送先)を示す行き先データや、走行時の走行方向や走行速度を示す走行データ等が含まれており、これらに基づいて制御部8は、走行駆動部10及び走行駆動部11を制御して実施形態に係るスタッカクレーンSとしての動作(走行)を制御する。またこれらのデータは、アンテナ7を介して必要なタイミングで取得される場合の他、後述するメモリ8A内に予め記憶されていてもよい。
【0043】
次に、実施形態に係るスタッカクレーンSの動作を制御する制御系の構成について、図2(a)を用いて説明する。なお図2(a)は当該制御系の構成を示すブロック図である。
【0044】
図2(a)に示すように、実施形態に係るスタッカクレーンSの制御部8には、重量検出部4Aによるガラス板Gを含む搬送具2の重量の検出結果と、振動検出部5による搬送具2及びガラス板Gにおける振動の検出結果と、が入力される。また制御部8内の態様情報記憶手段の一例及び閾値情報記憶手段の一例としてのメモリ8Aには、振動検出部5からの振動の検出結果を用いて当該振動の発生の有無を検出する際に用いられる振動振幅閾値を示す閾値データと、ガラス板Gを除いた搬送具2自体の重量を示す重量データと、が、予め不揮発性に記憶されている。この場合の閾値データは、搬送されるガラス板Gの重量に対応した複数種類の閾値データであり、例えば、ある重量に対応した閾値データにより示される振動振幅以上の振幅の振動がその重量のガラス板Gに発生している場合、そのガラス板Gの、特に搬送ワイヤWとの接触部に損傷が発生する可能性があると判定される。また当該閾値データは、重量が重いガラス板Gほど小さい振動振幅を示す閾値データである。この閾値データとしての振動振幅は、例えば、搬送されるガラス板Gの硬度及び重量やガラス板Gが載置される搬送ワイヤWの表面荒さ、又はガラス板Gに発生する振動の強さの経験値等に基づき、実験的又は経験的にガラス板Gの重量ごとに予め設定され、当該設定された振動振幅を示す閾値データが上記メモリ8Aに記憶されている。
【0045】
これらに加えてメモリ8Aには、搬送具2及びガラス板Gに振動が発生している場合におけるスタッカクレーンSの動作を制御するため動作制御データと、上記アンテナ7を介して取得された行き先を示す行き先データ等と、が記憶される。このとき当該動作制御データとしては、例えば後述する動作において、スタッカクレーンSの速度を上記走行データにより示される通常の走行速度から減速させる制御を示すデータが記憶される。また当該動作制御データは、予めメモリ8Aに記憶されていてもよいし、上記行き先データ等と同様にアンテナ7を介して必要なタイミングで取得されてもよい。
【0046】
これらに基づいて制御部8は、走行駆動部10及び走行駆動部11を制御してスタッカクレーンS自体を走行させてガラス板Gを搬送すると共に、昇降駆動部4Bを制御して搬送具2及びガラス板Gを昇降させ、更に必要な場合に警報部6を用いて、ガラス板Gにおける損傷の発生の可能性を示す警報を告知する。この警報部6における告知は、例えば点滅するランプ又は警報音等を用いて行われる。
【0047】
次に、上述してきた構成を備えるスタッカクレーンSにおける実施形態に係る動作を、具体的に図2(b)を用いて説明する。なお図2(b)は当該動作を示すフローチャートである。
【0048】
図2(b)に示すように、スタッカクレーンSにおける実施形態に係る動作として、先ず制御部8は、搬送台4上に搬送具2を含むガラス板Gが搭載されているか否かを、重量検出部4Aによるガラス板Gを含む搬送具2の重量の検出結果に基づいて判定する(ステップS1)。具体的に制御部8は、メモリ8Aに記憶されている上記重量データにより示されている搬送具2自体の重量を重量検出部4Aからの検出結果から差し引き、その結果がガラス板G一枚分の重量以上であれば、搬送台5上に少なくとも一枚のガラス板Gが搭載されていると判定する。なお、当該ガラス板G一枚分の重量を示すデータは、メモリ8A内に予め記憶されていてもよいし、アンテナ7を介して必要なタイミングで取得されてもよい。
【0049】
ステップS1の判定においてガラス板Gが搭載されていないと判定された場合(ステップS1;NO)、制御部8は例えば所定時間間隔ごとにステップS1の判定を繰り返す。一方ステップS1の判定においてガラス板Gが搭載されていると判定された場合(ステップS1;YES)、制御部8は次に、振動検出部5による搬送具2及びガラス板Gにおける振動の検出結果に基づいて、ガラス板Gに振動が発生しているか否かを判定する(ステップS2)。具体的に制御部8は、振動検出部5からの検出結果としての振動の振幅と、上記ステップS1の動作により検出されているガラス板Gの重量に対応する上記閾値データと、を比較し、当該検出結果としての振動の振幅が、対応する閾値データにより示される振動の振幅以上である場合、ガラス板Gに振動が発生していると判定する。ステップS2の判定においてガラス板Gに振動が発生していないと判定された場合(ステップS2;NO)、制御部8は例えば所定時間間隔ごとにステップS1の判定を繰り返す。一方ステップS2の判定においてガラス板Gに振動が発生していると判定された場合(ステップS2;YES)、制御部8は次に、制御部8内の計時手段の一例としてのタイマ8Bにおける計時を開始する(ステップS3)。その後制御部8は、当該タイマ8Bにおいて予め設定された一定時間、ガラス板Gの振動が継続したか否かを判定する(ステップS4)。このときステップS4における判定の基準となる一定時間は、例えば、搬送されるガラス板Gの硬度やガラス板Gが載置される搬送ワイヤWの表面荒さ・硬度、又はガラス板Gに発生する振動の強さの経験値等に基づき、実験的又は経験的に予め設定され、当該設定された一定時間を示す情報が上記メモリ8Aに記憶されているものである。制御部8は当該記憶されている情報を読み出して上記ステップS4の判定を行う。
【0050】
ステップS4の判定において一定時間当該振動が継続していない場合、即ち、当該一定時間の経過前に当該振動が停止した場合(ステップS4;NO)、制御部8は、当該振動の再度の発生を監視すべく、上記ステップS2の判定に移行する。一方ステップS4の判定において一定時間当該振動が継続した場合(ステップS4;YES)、制御部8は、ガラス板Gの振動(特に鉛直方向に平行な方向の振動)により、例えばガラス板Gにおける搬送ワイヤWとの接触部が損傷する(キズがつく)可能性があるとして、スタッカクレーンSにおける損傷防止制御を行う(ステップS5)。即ち、ガラス板Gの損傷を防止するためにスタッカクレーンSの走行態様を制御する。このステップS5の損傷防止制御として具体的に制御部8は、例えば、メモリ8Aに記憶されている上記動作制御データに基づき、スタッカクレーンSの速度を上記走行データにより示される通常の走行速度から減速させる制御を行う。なお制御部8は、上記動作制御データに基づいて、当該減速後、更にスタッカクレーンSを停止させるように制御してもよい。これらと並行して制御部8は、警報部6を用いてガラス板Gにおける損傷の発生を示す警報を告知する。
【0051】
その後制御部8は、例えばスタッカクレーンSが上記行き先データにより示される行き先に到達したことでガラス板Gの搬送を終了するか否かを判定する(ステップS6)。ステップS6の判定において、いまだ当該行き先に到達していないとしてガラス板Gの搬送をまだ終了しない場合(ステップS6;NO)、制御部8は、上記ステップS1に戻って上述してきた動作を繰り返す。一方ステップS6の判定においてガラス板Gの搬送を終了する場合(ステップS6;YES)、制御部8は、スタッカクレーンSにおける実施形態に係る動作を終了する。
【0052】
なお、スタッカクレーンSにおける実施形態に係る動作を終了した場合において、それまで搬送して来たガラス板Gを積み下ろした後、制御部8は、例えばスタッカクレーンSにおける走行の最大可能速度により、次の搬送開始位置までスタッカクレーンSを走行させる。またこれに加えて制御部8は、ガラス板Gを搭載していない場合については全て、当該最大可能速度によりスタッカクレーンSを走行させるように構成することもできる。
【0053】
以上説明したように、スタッカクレーンSにおける実施形態に係る動作によれば、スタッカクレーンSへのガラス板Gの搭載及びその走行に起因するガラス板Gの振動の発生が共に検出された後、既定の一定時間振動の発生が継続したときにスタッカクレーンSを減速させるので、ガラス板Gの損傷を防止しつつガラス板Gを搬送することができる。
【0054】
また、既定の一定時間振動の発生が継続したときにスタッカクレーンSを減速させるので、スタッカクレーンSによるガラス板Gの搬送の実情に合わせて、確実にガラス板Gの損傷を防止することができる。
【0055】
更に、減速された後にスタッカクレーンSが停止される場合には、更に確実にガラス板Gの損傷を防止することができる。また、減速した後にスタッカクレーンSが停止されるので、スタッカクレーンSが急停止することによるガラス板Gの損傷を防止できる。
【0056】
更にまた、スタッカクレーンSの減速等に伴ってガラス板Gに損傷が発生する可能性を示す警報を告知するので、当該損傷の発生の可能性を周囲の者に迅速に認識させることができる。
【0057】
また、ガラス板Gの搭載が検出されている場合にその重量を検出し、検出された重量に対応した値の振動振幅の閾値データを用いてガラス板Gに振動が発生しているか否かを検出するので、損傷発生の原因となる振動を、ガラス板Gの重量に応じて適切に検出することができる。
【0058】
更に、ガラス板Gの損傷の主原因となる鉛直方向に平行な方向に発生する加速度を少なくとも検出する簡易な構成の振動検出部5により振動を検出することで、簡易な構成の振動検出部5を用いてガラス板Gの損傷を効果的に防止することができる。
【0059】
更にまた、ガラス板Gの搭載が検出されない場合に、最大可能速度によりスタッカクレーンSを走行させるので、次のガラス板Gの搬送等を迅速に開始することができる。
【0060】
また、スタッカクレーンSが自走式のスタッカクレーンSであるので、自走式のスタッカクレーンSを用いたガラス板Gの搬送において当該ガラス板Gの損傷を防止しつつ搬送することができる。
【0061】
なお、上述した実施形態では、スタッカクレーンSに対するガラス板Gの搭載及び走行に起因するガラス板Gの振動の発生が共に検出された後、一定時間その振動が継続した場合にスタッカクレーンSを減速等させることとした。しかしながらこの他に、本発明に係る変形形態として図2(b)に示すように、ガラス板Gの搭載及び走行に起因するガラス板Gの振動の発生が共に検出されたとき(ステップS1;YES及びステップS2;YES)、直ちに上記ステップS5に係る損傷防止制御に移行するように構成することもできる。この場合には、ガラス板Gに損傷が発生している可能性が少しでもあればそれを防止するようにスタッカクレーンSの減速等を行うことで、確実に板ガラスGの損傷を防止することができる。
【0062】
また、上記実施形態及び変形形態に係るステップS5の損傷防止制御においては、スタッカクレーンSを減速させ、或いは減速後に停止させるように構成したが、これ以外に、当該減速後に、スタッカクレーンSの目的地(ガラス板Gの搬送先)を、ガラス板Gの検査工程が行われている位置又はガラス板Gの廃棄工程が行われている位置の少なくともいずれか一方に変更してスタッカクレーンSを走行させるように制御してもよい。この場合には、ガラス板Gの損傷の可能性がある場合に、その検査工程が行われている位置又は廃棄工程が行われている位置の少なくともいずれか一方にスタッカクレーンSの目的地が変更されるので、損傷している可能性のあるガラス板Gの検査又は廃棄を迅速に行うことができる。
【0063】
更に、上記実施形態及び変形形態に係るスタッカクレーンSの動作においては、一台のスタッカクレーンSについて、ガラス板Gの損傷の可能性がある場合に当該スタッカクレーンSを減速させ、或いは減速後に停止させるように構成した。しかしながらこの他に、同一の走路を走行する複数のスタッカクレーンSを例えば上記図示しない中央制御装置において一元的に制御する場合において、一台のスタッカクレーンSについてガラス板Gの搭載及び振動の発生が共に検出された位置を走行した他のスタッカクレーンSに搭載されていたガラス板Gについて、その損傷の可能性がある旨の告知を、例えば当該他のスタッカクレーンSの警報部6や上記図示しない中央制御装置における表示を用いて行うように構成することもできる。この場合には、一台のスタッカクレーンSについてガラス板Gの搭載及び振動の発生が共に検出された位置を走行した他のスタッカクレーンSに搭載されていたガラス板Gについても損傷の可能性がある旨の告知を行うので、複数のスタッカクレーンSにそれぞれ搭載されているガラス板Gにおける損傷の発生を迅速に認識することができる。
【0064】
更にまた、上述した実施形態及び変形形態においては、重量検出部4Aにおける重量の検出結果を用いて、ガラス板Gが搬送台4に搭載されているか否かの判定を行った。しかしながら、この重量検出部4Aを用いる方法以外に、例えば、接触式のスイッチによりガラス板Gの搭載の有無を直接検出するように構成することもできる。また例えば、ガラス板Gの搭載により遮断されるレーザ光等を用いた光学的なセンサを用いる方法により、ガラス板Gの搭載を直接検出するように構成することもできる。これらの場合には重量検出部4Aは不要となり、また振動検出部5における振動の検出に用いられる上記閾値データも、予め設定された一の閾値データとの比較により振動の発生を検出することになる。
【0065】
また、上述した実施形態及び変形形態では、スタッカクレーンSにより搬送される被搬送物としてガラス板Gについて例示したが、これ以外に、走行に起因する振動により損傷する可能性のある被搬送物であれば、当該被搬送物を搬送するスタッカクレーンSについて広く本発明を適用することが可能である。
【0066】
更に、上述した実施形態及び変形形態では、自走式のスタッカクレーンSの動作制御に対して本発明を適用したが、これ以外に、例えばつり下げ式のスタッカクレーンや、自走式のクレーン等の走行体の動作制御に対して本発明を広く適用することが可能である。
【0067】
更にまた、実施形態又は変形形態に係る制御部8の機能に対応するプログラムを、例えば光ディスク等の記録媒体に記録しておき、或いはインターネット等のネットワークから取得して記録しておき、これらを読み出して汎用のマイクロコンピュータ等により実行させることにより、当該マイクロコンピュータ等を、実施形態又は変形形態に係る制御部8として機能させることも可能である。
【産業上の利用可能性】
【0068】
以上それぞれ説明したように、本発明は走行体制御装置の分野に利用することが可能であり、特に容易に損傷する可能性のある被搬送物を搬送する走行体を制御する走行体制御装置の分野に適用すれば特に顕著な効果が得られる。
【符号の説明】
【0069】
1 筐体
2 搬送具
3 支持部
4 搬送台
4A 重量検出部
4B 昇降駆動部
5 振動検出部
6 警報部
7 アンテナ
8 制御部
8A メモリ
8B タイマ
9 車輪
10、11 走行駆動部
12 車軸
S スタッカクレーン
R レール
G ガラス板
W 搬送ワイヤ
T1、T2 棚
【特許請求の範囲】
【請求項1】
被搬送物を搬送する自走式の走行体を制御する走行体制御装置において、
前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段と、
前記走行体への前記被搬送物の搭載の有無を検出する搭載検出手段と、
前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出手段と、
前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更する変更手段と、
を備えることを特徴とする走行体制御装置。
【請求項2】
請求項1に記載の走行体制御装置において、
前記被搬送物の搭載及び前記振動の発生が共に検出されたタイミングから計時を開始する計時手段を更に備え、
前記変更手段は、前記被搬送物の搭載及び前記振動の発生が共に検出された後、予め設定された一定時間前記振動の発生が継続したとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更することを特徴とする走行体制御装置。
【請求項3】
請求項1又は請求項2に記載の走行体制御装置において、
前記態様情報は、前記振動の発生が検出される前に比べて前記走行体を減速させる走行態様を示すことを特徴とする走行体制御装置。
【請求項4】
請求項3に記載の走行体制御装置において、
前記態様情報は、前記走行体を減速させた後に停止させる走行態様を示すことを特徴とする走行体制御装置。
【請求項5】
請求項3に記載の走行体制御装置において、
前記態様情報は、前記走行体を減速させた後に、当該走行体の目的地を、前記被搬送物の検査工程が行われている位置又は当該被搬送物の廃棄工程が行われている位置の少なくともいずれか一方に変更して当該走行体を走行させる走行態様を示すことを特徴とする走行体制御装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載の走行体制御装置において、
前記走行体の走行態様が前記記憶されている態様情報により示される走行態様に変更されたとき、前記被搬送物に損傷が発生する可能性を示す警報を告知する警報告知手段を更に備えることを特徴とする走行体制御装置。
【請求項7】
請求項1から請求項6のいずれか一項に記載の走行体制御装置において、
前記振動検出手段における前記振動の検出に用いられる振動閾値であって、前記被搬送物の重量に対応した値の振動閾値を示す閾値情報を記憶する閾値情報記憶手段と、
前記被搬送物の搭載が検出されている場合に、当該搭載されている被搬送物の重量を検出する重量検出手段と、
を更に備え、
前記被搬送物の搭載が検出されている場合において前記振動検出手段は、前記検出された重量に対応した値の前記振動閾値を用いて前記振動が発生しているか否かを検出することを特徴とする走行体制御装置。
【請求項8】
請求項1から請求項7のいずれか一項に記載の走行体制御装置において、
前記振動検出手段は、前記走行体に搭載された前記被搬送物における鉛直方向に平行な方向に発生する加速度を検出することにより前記振動を検出することを特徴とする走行体制御装置。
【請求項9】
請求項1から請求項8のいずれか一項に記載の走行体制御装置において、
前記被搬送物の搭載が検出されない場合において前記制御手段は、最大可能速度により前記走行体を走行させることを特徴とする走行体制御装置。
【請求項10】
請求項1から請求項9のいずれか一項に記載の走行体制御装置において、
前記制御手段は複数の前記走行体の制御をそれぞれ行うと共に、
一の前記走行体について前記被搬送物の搭載及び前記振動の発生が共に検出された位置を走行した他の前記走行体に搭載されていた前記被搬送物についても前記損傷の可能性がある旨の告知を行う告知手段を更に備えることを特徴とする走行体制御装置。
【請求項11】
請求項1から請求項10のいずれか一項に記載の走行体制御装置において、
前記走行体は前記被搬送物を搭載して走行する自走式のスタッカクレーンであることを特徴とする走行体制御装置。
【請求項12】
被搬送物を搬送する自走式の走行体を制御する走行体制御装置であって、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段を備える走行体制御装置において実行される走行体制御方法であって、
前記走行体への前記被搬送物の搭載の有無を検出する搭載検出工程と、
前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出工程と、
前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御工程と、
を含むことを特徴とする走行体制御方法。
【請求項13】
被搬送物を搬送する自走式の走行体を制御する走行体制御装置に含まれるコンピュータを、
前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段、
前記走行体への前記被搬送物の搭載の有無を検出する搭載検出手段、
前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出手段、及び、
前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御手段、
として機能させることを走行体制御プログラム。
【請求項14】
請求項13に記載の前記走行体制御プログラムが、前記コンピュータにおいて読み取り可能に記録されていることを特徴とする記録媒体。
【請求項1】
被搬送物を搬送する自走式の走行体を制御する走行体制御装置において、
前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段と、
前記走行体への前記被搬送物の搭載の有無を検出する搭載検出手段と、
前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出手段と、
前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更する変更手段と、
を備えることを特徴とする走行体制御装置。
【請求項2】
請求項1に記載の走行体制御装置において、
前記被搬送物の搭載及び前記振動の発生が共に検出されたタイミングから計時を開始する計時手段を更に備え、
前記変更手段は、前記被搬送物の搭載及び前記振動の発生が共に検出された後、予め設定された一定時間前記振動の発生が継続したとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更することを特徴とする走行体制御装置。
【請求項3】
請求項1又は請求項2に記載の走行体制御装置において、
前記態様情報は、前記振動の発生が検出される前に比べて前記走行体を減速させる走行態様を示すことを特徴とする走行体制御装置。
【請求項4】
請求項3に記載の走行体制御装置において、
前記態様情報は、前記走行体を減速させた後に停止させる走行態様を示すことを特徴とする走行体制御装置。
【請求項5】
請求項3に記載の走行体制御装置において、
前記態様情報は、前記走行体を減速させた後に、当該走行体の目的地を、前記被搬送物の検査工程が行われている位置又は当該被搬送物の廃棄工程が行われている位置の少なくともいずれか一方に変更して当該走行体を走行させる走行態様を示すことを特徴とする走行体制御装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載の走行体制御装置において、
前記走行体の走行態様が前記記憶されている態様情報により示される走行態様に変更されたとき、前記被搬送物に損傷が発生する可能性を示す警報を告知する警報告知手段を更に備えることを特徴とする走行体制御装置。
【請求項7】
請求項1から請求項6のいずれか一項に記載の走行体制御装置において、
前記振動検出手段における前記振動の検出に用いられる振動閾値であって、前記被搬送物の重量に対応した値の振動閾値を示す閾値情報を記憶する閾値情報記憶手段と、
前記被搬送物の搭載が検出されている場合に、当該搭載されている被搬送物の重量を検出する重量検出手段と、
を更に備え、
前記被搬送物の搭載が検出されている場合において前記振動検出手段は、前記検出された重量に対応した値の前記振動閾値を用いて前記振動が発生しているか否かを検出することを特徴とする走行体制御装置。
【請求項8】
請求項1から請求項7のいずれか一項に記載の走行体制御装置において、
前記振動検出手段は、前記走行体に搭載された前記被搬送物における鉛直方向に平行な方向に発生する加速度を検出することにより前記振動を検出することを特徴とする走行体制御装置。
【請求項9】
請求項1から請求項8のいずれか一項に記載の走行体制御装置において、
前記被搬送物の搭載が検出されない場合において前記制御手段は、最大可能速度により前記走行体を走行させることを特徴とする走行体制御装置。
【請求項10】
請求項1から請求項9のいずれか一項に記載の走行体制御装置において、
前記制御手段は複数の前記走行体の制御をそれぞれ行うと共に、
一の前記走行体について前記被搬送物の搭載及び前記振動の発生が共に検出された位置を走行した他の前記走行体に搭載されていた前記被搬送物についても前記損傷の可能性がある旨の告知を行う告知手段を更に備えることを特徴とする走行体制御装置。
【請求項11】
請求項1から請求項10のいずれか一項に記載の走行体制御装置において、
前記走行体は前記被搬送物を搭載して走行する自走式のスタッカクレーンであることを特徴とする走行体制御装置。
【請求項12】
被搬送物を搬送する自走式の走行体を制御する走行体制御装置であって、前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段を備える走行体制御装置において実行される走行体制御方法であって、
前記走行体への前記被搬送物の搭載の有無を検出する搭載検出工程と、
前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出工程と、
前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御工程と、
を含むことを特徴とする走行体制御方法。
【請求項13】
被搬送物を搬送する自走式の走行体を制御する走行体制御装置に含まれるコンピュータを、
前記走行体に搭載されている前記被搬送物の損傷を防止可能な当該走行体の走行態様を示す態様情報を記憶する態様情報記憶手段、
前記走行体への前記被搬送物の搭載の有無を検出する搭載検出手段、
前記被搬送物の搭載が検出されている場合において、前記走行体の走行に起因する振動が前記被搬送物に発生しているか否かを検出する振動検出手段、及び、
前記被搬送物の搭載及び前記振動の発生が共に検出されたとき、前記走行体の走行態様を、前記記憶されている態様情報により示される走行態様に変更して当該走行体を制御する制御手段、
として機能させることを走行体制御プログラム。
【請求項14】
請求項13に記載の前記走行体制御プログラムが、前記コンピュータにおいて読み取り可能に記録されていることを特徴とする記録媒体。
【図1】


【図2】
【図2】
【公開番号】特開2013−67502(P2013−67502A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208736(P2011−208736)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000002897)大日本印刷株式会社 (14,506)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000002897)大日本印刷株式会社 (14,506)
【Fターム(参考)】
[ Back to top ]