
走行判定装置、走行判定方法、プログラム及び媒体
【課題】走行中にエンジンが停止された場合に速やかに再始動を促すことが可能な走行判定装置、走行判定方法、プログラム及び媒体を提供すること。
【解決手段】本発明による走行判定装置は、車両の車速を検出する車速検出手段と、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択可能な選択手段と、前記車速が正値であって当該選択手段により前記停止状態が選択されたか否かを判定する停止判定手段と、当該停止判定手段が肯定と判定してからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測手段と、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定手段とを含むことを特徴とすることを特徴とする。
【解決手段】本発明による走行判定装置は、車両の車速を検出する車速検出手段と、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択可能な選択手段と、前記車速が正値であって当該選択手段により前記停止状態が選択されたか否かを判定する停止判定手段と、当該停止判定手段が肯定と判定してからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測手段と、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定手段とを含むことを特徴とすることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、乗用車、トラック、バス等の車両に適用して好適な走行判定装置、走行判定方法、プログラム及び媒体に関する。
【背景技術】
【0002】
近年、車両の走行中における不都合の発生を想定して、走行中にエンジンを停止させることが考慮されている。特にエンジンの起動や停止に対してプッシュスイッチの押し操作を伴う車両においては、SAE規格において、上述した不都合を伴っての停止、不都合の発生を伴わない運転者の意図しない操作による走行中のエンジンの停止に対して、走行中に速やかにエンジンの再始動を促すことが推奨されている。
【0003】
このような再始動を促すメッセージを車両側が運転者に対して発信するためには、エンジンを停止させた状態にて車両が走行中であるか停車中であるかを判定する必要が生じる。例えば特許文献1に示されるように、車両内ではあるECU(Electronic Control Unit)が一般的に車輪速センサからの信号を元に車速を演算しており、エンジンを停止させた状態つまりACC状態においてはこのECUに電源が供給されず、演算が不可となり車速を取得することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−083530号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
つまり上記のような従来のシステムにおいては、走行中にエンジンが停止されてACC状態となった場合において、車速を得ることができず、従って、車両が走行中であるか停車中であるかを判別することができないため、上述したような走行中におけるエンジンの再始動を促すメッセージを発することもできないという問題が生じる。
【0006】
本発明は、上記問題に鑑み、走行中にエンジンが停止された場合に速やかに再始動を促すことが可能な走行判定装置、走行判定方法、プログラム及び媒体を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の問題を解決するため、本発明による走行判定装置は、
車両の車速を検出する車速検出手段と、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択可能な選択手段と、前記車速が正値であって当該選択手段により前記停止状態が選択されたか否かを判定する停止判定手段と、当該停止判定手段が肯定と判定してからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測手段と、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定手段とを含むことを特徴とする。
【0008】
ここで前記走行判定装置において、
前記車両の制動装置により制動が行われているか否かを判定する制動判定手段を含み、当該制動判定手段により肯定と判定される場合には、前記停止時車速と前記車両において最大と想定される想定最大減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うこととしてもよく、さらに、前記制動判定手段により否定と判定される場合には、前記停止時車速と前記車両において最小と想定される想定最小減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うこととしてもよい。
【0009】
加えて、前記走行判定装置において、
前記走行判定手段により前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示手段を含むこととしてもよい。
【0010】
上記の問題を解決するため、本発明による走行判定方法は、
車両の車速を検出する車速検出ステップと、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択する選択ステップと、前記車速が正値であって当該選択ステップにおいて前記停止状態が選択されたか否かを判定する停止判定ステップと、当該停止判定ステップにおいて肯定と判定されてからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測ステップと、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定ステップとを含むことを特徴とする。
【0011】
前記走行判定方法において、
前記走行判定ステップにおいて前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示ステップを含むこととしてもよい。なお、本発明のプログラムは、前記走行判定方法を実行するプログラムであり、本発明の媒体は前記プログラムを格納した媒体である。
【発明の効果】
【0012】
本発明によれば、車速が正値である通常走行中に駆動源(エンジン)が停止された場合に、車両が走行中であるか停車中であるかを判定して、走行中である場合に速やかに再始動を促すことを可能なものとすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る本実施例の走行判定装置1の一実施形態を示すブロック図である。
【図2】本実施例の走行判定装置1の一実施形態の制御内容を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、本発明を実施するための形態について、添付図面を参照しながら説明する。
【実施例】
【0015】
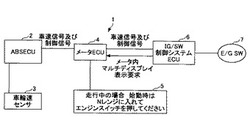
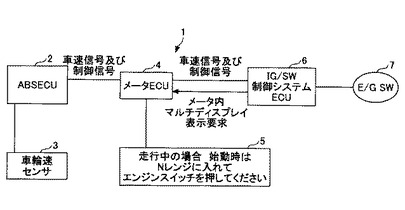
図1に示すように、本実施例の走行判定装置1は、ABSECU2(Anti Lock Brake System Electronic Control Unit)と、車輪速センサ3と、メータECU4と、メータ内マルチインフォメーションディスプレイ5と、IG/SW制御システムECU6と、エンジンスイッチ7と、を備えて構成される。
【0016】
ABSECU2と、メータECU4と、IG/SW制御システムECU6と、は例えばCAN(Controller Area Network)等の通信規格により相互に接続される。なお、CANに換えて、LIN(Local Interconnect Network)に代表される低速なボデー系通信プロトコル、MOST(Media Oriented Systems Transport)に代表されるマルチメディア系通信プロトコル、FlexRay等のその他の適切な通信プロトコルを用いてもよい。
【0017】
ABSECU2は例えばCPU、ROM、RAMおよびそれらを接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが以下に述べる所定の処理を行うものである。ここでは、ABSECU2は、車両の例えば従動輪に対応して又は四輪全てに対応して設置された車輪速センサ3からの車輪速信号に基づいて車速信号を演算し、車速信号をCAN上に送信する。
【0018】
メータECU4も例えばCPU、ROM、RAMおよびそれらを接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが以下に述べる所定の処理を行うものである。ここでは、メータECU4は、ABSECU2から送信された車速信号を受信して、メータ内の図示しない速度計により又はメータ内マルチインフォメーションディスプレイ5の画面内の速度計により速度を表示する。
【0019】
IG/SW制御システムECU6も例えばCPU、ROM、RAMおよびそれらを接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが以下に述べる所定の処理を行い、車速検出手段6a、停止判定手段6b、計測手段6c、走行判定手段6d、制動判定手段6e、表示手段6fを構成するものである。
【0020】
エンジンスイッチ7は車両の運転席の右方に設置されて、押し操作により、IGOFF、ACC、IGONをIG/SW制御システムECU6の制御に基づいてこの順番にて遷移させて選択し、長押し操作(例えば3秒程度以上の押し継続)によりこれもIG/SW制御システムECU6の制御に基づいてここでは図示しないエンジンを始動又は再始動するSTARTを選択する選択手段を構成する。
【0021】
駆動源としての図示しないエンジンを駆動する駆動状態はエンジンスイッチ7である選択手段によりSTARTを選択することによって選択され、駆動源を停止する停止状態はACCに対応しており、これもエンジンスイッチ7の操作により選択される。
【0022】
なお、通常の停車中における始動又は再始動においては、運転者はシフトレバーをパーキングレンジとしてエンジンスイッチ7を長押しするものとし、走行中における再始動においては、運転者はシフトレバーをニュートラルレンジとしてエンジンスイッチ7を長押しするものとする。また、走行中における停止においてはエンジンスイッチ7を単に長押しするものとする。
【0023】
IG/SW制御システムECU6の車速検出手段6aはメータECU4から車速信号を受信して車速Vを検出する。停止判定手段6bは、車速Vが正値であってエンジンスイッチ7によりACCつまり停止状態が選択されたか否かを判定する。計測手段6cは、停止判定手段6bが肯定と判定してからの経過時間Tpと肯定と判定したときの車速Vである停止時車速VACCを計測する。走行判定手段6dは、経過時間Tpと停止時車速VACCに基づいて車両が走行中であるか停車中であるかの走行判定を行う。
【0024】
走行判定は車両で制動が行われているか否かにより場合分けして行う。IG/SW制御システムECU6の制動判定手段6eは、車両の制動装置により制動が行われているか否かを例えばABSECU2からの制動信号に基づいて判定する。なお、制動信号は例えばストップランプスイッチ等から別個にIG/SW制御システムECU6に入力されていても良い。
【0025】
制動判定手段6eにより肯定と判定される場合には、走行判定手段6dは、停止時車速VACCと車両において最大と想定される想定最大減速度α(例えば0.5G:運転者がブレーキペダルを一杯に踏む急ブレーキに相当する減速度)及び経過時間Tpから走行判定を行う。つまり、停車時間Tstop1=VACC/αを演算して、Tp>Tstop1であれば停車中であると判定し、Tp≦Tstop1であれば走行中であると判定する。
【0026】
制動判定手段6eにより否定と判定される場合には、停止時車速VACCと車両において最小と想定される想定最小減速度β(例えば車両の空走、堕行を伴う走行試験により求められる減速度)及び経過時間Tpから走行判定を行う。つまり、停車時間Tstop2=VACC/βを演算して、Tp>Tstop2であれば停車中であると判定し、Tp≦Tstop2であれば走行中であると判定する。
【0027】
IG/SW制御システムECU6の走行判定手段6dにより走行中であると判定される場合には、IG/SW制御システムECU6の表示手段6fは、エンジンすなわち駆動源の再始動を促す内容を表示するための、表示要求をメータECU4に送信し、メータECU4はこの表示要求に基づいて、例えば、「走行中の場合は、再始動時にはニュートラルレンジに入れてエンジンスイッチ7を長押ししてください。」というメッセージを含むテキストをメータ内マルチインフォメーションディスプレイ5の画面内に表示する。
【0028】
以下、本実施例の走行判定装置1の制御内容をフローチャートに基づいて説明する。図2は、本発明による走行判定装置1の制御内容を示すフローチャートである。
【0029】
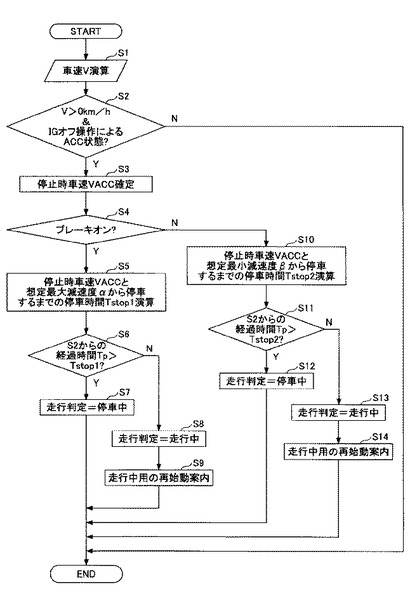
ステップS1において、IG/SW制御システムECU6の車速検出手段6aは、ABSECU2が車輪速センサ3から得た車輪速信号から演算した車速信号を、メータECU4を介して取得して車速Vを検出する。
【0030】
ステップS2において、IG/SW制御システムECU6の停止判定手段6bは、車速Vが0km/hより大きく正値であって、エンジンスイッチ7によりACC(停止状態)が選択されているか否かを判定し、肯定であればステップS3にすすみ、否定であればENDの手前にすすむ。
【0031】
ステップS3において、IG/SW制御システムECU6の計測手段6cは、ステップS2において肯定と判定された時を基準として、その時の車速Vである停止時車速VACCを確定し、さらに、ステップS4において、IG/SW制御システムECU6の制動判定手段6eは、ABSECU2からの制動信号に基づいて、ブレーキオンがされているか否かを判定し、肯定であれば、ステップS5にすすみ、否定であればステップS10にすすむ。
【0032】
ステップS5において、IG/SW制御システムECU6の走行判定手段6dは、停止時車速VACCと想定最大減速度αの除算に基づいて制動時に停車するまでに要する停車時間Tstop1を演算し、ステップS6において、ステップS2からの経過時間TpとTstop1との比較を行い、Tp>Tstop1が成立するか否かを判定する。
【0033】
ステップS6において肯定と判定される場合には、ステップS7にすすみ、ステップS7において走行判定手段6dは、車両が停車中である旨の走行判定を下す。また、ステップS6において否定と判定される場合には、ステップS8にすすみ、ステップS8において、車両が走行中である旨の走行判定を下して、ステップS8の後のステップS9において、IG/SW制御システムECU6の表示手段6fは走行中のエンジンの再始動を促すメッセージを、メータECU4を介して、メータ内マルチインフォメーションディスプレイ5の画面内に表示させる。
【0034】
ステップS10において、IG/SW制御システムECU6の走行判定手段6dは、停止時車速VACCと想定最小減速度βの除算に基づいて空走、堕行時に停車するまでに要する停車時間Tstop2(>Tstop1)を演算し、ステップS11において、ステップS2からの経過時間TpとTstop2との比較を行い、Tp>Tstop2が成立するか否かを判定する。
【0035】
ステップS11において肯定と判定される場合には、ステップS12において走行判定手段6dは、車両が停車中であるとの走行判定を下し、ステップS11において否定と判定される場合には、ステップS13において、車両が走行中であるとの走行判定を下して、ステップS13の後のステップS14において、IG/SW制御システムECU6の表示手段6fは走行中のエンジンの再始動を促すメッセージを、メータECU4を介して、メータ内マルチインフォメーションディスプレイ5の画面内に表示させる。
【0036】
なお、STARTからENDまでのステップS1からステップS14までの処理は、IG/SW制御システムECU6の処理周期毎に繰り返し実行され、本発明の走行判定方法が実行される。
【0037】
以上述べた制御内容により実現される本実施例の走行判定装置1及び走行判定方法によれば、以下に述べるような作用効果を得ることができる。すなわち、走行中において何らかの不都合の発生に伴って運転者が意図的にエンジンスイッチ7によりエンジンを停止させた場合と、誤ってエンジンスイッチ7を操作することによってエンジンを停止させた場合の双方において、エンジンの再始動を促し、再始動時の具体的操作を示すメッセージを速やかに運転者に表示することができる。
【0038】
この表示に基づいて運転者はエンジンの再始動を速やかに行うことができる。特に走行中の再始動はニュートラルレンジを選択する必要があり、停車中の再始動ではパーキングレンジを選択することに対して操作が異なることに起因して、運転者が速やかに再始動を行うことが困難となることを防止することができる。
【0039】
特に本実施例の前提となる、走行中におけるエンジンの停止が行われた場合においては、車両の構造上、車速を取得することができなくなるが、本実施例によれば、ブレーキがオンであるか否かを場合分けして、オンである場合には想定最大減速度αを用いて停車時間Tstop1を演算し、オフである場合には想定最小減速度βを用いて停車時間Tstop2を演算した上で、停止時車速VACCを除算して停車時間を求め経過時間との比較を行うことで、車両が停車中であるか走行中であるかを容易に判定することができる。
【0040】
また、走行中においてエンジンが停止された状態が継続することにより、例えばブレーキ関係のアシスト力の付与や、ステアリングホイールの操舵アシスト力の付与等の、運転者の運転操作を補助する補助動作が継続して使用不可となる期間をなるべく短くすることができる。
【0041】
なお、上述した不都合とは、何らかの不具合により一時的にアクセルペダルの操作性が低下して、走行中においてエンジンを一時的に停止した後、速やかに不具合を除去する必要が生じる場合等を含む。
【0042】
以上本発明の好ましい実施例について詳細に説明したが、本発明は上述した実施例に制限されることなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形および置換を加えることができる。
【0043】
上述した実施例においては再始動を促すメッセージをテキストとして表示する例を示したが、このメッセージに換えて、又は併せて、例えば、ニュートラルレンジを示す「N」とエンジンスイッチ7の長押しを示す「PUSH」等の記号を適宜組み合わせて含むテルテール(ウォーニング用ランプ)をメータ内マルチインフォメーションディスプレイ5の画面内又は画面外に予め備えて、このテルテールを点灯又は点滅、あるいは表示色を青から赤等の警戒色に変更することとしてもよい。
【0044】
加えて、上述した実施例においては本発明を、エンジンスイッチ7を具備したオートマチックの車両に適用するものとしているが、エンジンスイッチ7を具備したマニュアル式の車両に適用することもでき、その場合には、走行中のエンジンの再始動は、クラッチを踏む操作とともに行う。
【0045】
この場合においては、上述した再始動を促すメッセージは例えば、「走行中の場合はクラッチを踏みながらエンジンスイッチ7を長押し操作してください。」とすることができる。
【産業上の利用可能性】
【0046】
本発明は、上述した不都合の発生に伴って運転者が意図的にエンジンスイッチを扱って、又は、運転者の誤操作によりエンジンスイッチが扱われて、走行中にエンジンが停止された場合に、ACCが選択されることにより車速を取得できなくなる状態でも、車両が走行中であるか停車中であるかをより正確に判定して、走行中であれば速やかに再始動を促すことを可能とすることができるので、走行中にエンジンを停止することが可能な乗用車、トラック、バス等の様々な車両に適用して有益なものである。
【符号の説明】
【0047】
1 走行判定装置
2 ABSECU
3 車輪速センサ
4 メータECU
5 メータ内マルチインフォメーションディスプレイ
6 IG/SW制御システムECU
6a 車速検出手段
6b 停止判定手段
6c 計測手段
6d 走行判定手段
6e 制動判定手段
6f 表示手段
7 エンジンスイッチ(選択手段)
【技術分野】
【0001】
本発明は、乗用車、トラック、バス等の車両に適用して好適な走行判定装置、走行判定方法、プログラム及び媒体に関する。
【背景技術】
【0002】
近年、車両の走行中における不都合の発生を想定して、走行中にエンジンを停止させることが考慮されている。特にエンジンの起動や停止に対してプッシュスイッチの押し操作を伴う車両においては、SAE規格において、上述した不都合を伴っての停止、不都合の発生を伴わない運転者の意図しない操作による走行中のエンジンの停止に対して、走行中に速やかにエンジンの再始動を促すことが推奨されている。
【0003】
このような再始動を促すメッセージを車両側が運転者に対して発信するためには、エンジンを停止させた状態にて車両が走行中であるか停車中であるかを判定する必要が生じる。例えば特許文献1に示されるように、車両内ではあるECU(Electronic Control Unit)が一般的に車輪速センサからの信号を元に車速を演算しており、エンジンを停止させた状態つまりACC状態においてはこのECUに電源が供給されず、演算が不可となり車速を取得することができない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−083530号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
つまり上記のような従来のシステムにおいては、走行中にエンジンが停止されてACC状態となった場合において、車速を得ることができず、従って、車両が走行中であるか停車中であるかを判別することができないため、上述したような走行中におけるエンジンの再始動を促すメッセージを発することもできないという問題が生じる。
【0006】
本発明は、上記問題に鑑み、走行中にエンジンが停止された場合に速やかに再始動を促すことが可能な走行判定装置、走行判定方法、プログラム及び媒体を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の問題を解決するため、本発明による走行判定装置は、
車両の車速を検出する車速検出手段と、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択可能な選択手段と、前記車速が正値であって当該選択手段により前記停止状態が選択されたか否かを判定する停止判定手段と、当該停止判定手段が肯定と判定してからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測手段と、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定手段とを含むことを特徴とする。
【0008】
ここで前記走行判定装置において、
前記車両の制動装置により制動が行われているか否かを判定する制動判定手段を含み、当該制動判定手段により肯定と判定される場合には、前記停止時車速と前記車両において最大と想定される想定最大減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うこととしてもよく、さらに、前記制動判定手段により否定と判定される場合には、前記停止時車速と前記車両において最小と想定される想定最小減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うこととしてもよい。
【0009】
加えて、前記走行判定装置において、
前記走行判定手段により前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示手段を含むこととしてもよい。
【0010】
上記の問題を解決するため、本発明による走行判定方法は、
車両の車速を検出する車速検出ステップと、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択する選択ステップと、前記車速が正値であって当該選択ステップにおいて前記停止状態が選択されたか否かを判定する停止判定ステップと、当該停止判定ステップにおいて肯定と判定されてからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測ステップと、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定ステップとを含むことを特徴とする。
【0011】
前記走行判定方法において、
前記走行判定ステップにおいて前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示ステップを含むこととしてもよい。なお、本発明のプログラムは、前記走行判定方法を実行するプログラムであり、本発明の媒体は前記プログラムを格納した媒体である。
【発明の効果】
【0012】
本発明によれば、車速が正値である通常走行中に駆動源(エンジン)が停止された場合に、車両が走行中であるか停車中であるかを判定して、走行中である場合に速やかに再始動を促すことを可能なものとすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る本実施例の走行判定装置1の一実施形態を示すブロック図である。
【図2】本実施例の走行判定装置1の一実施形態の制御内容を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、本発明を実施するための形態について、添付図面を参照しながら説明する。
【実施例】
【0015】
図1に示すように、本実施例の走行判定装置1は、ABSECU2(Anti Lock Brake System Electronic Control Unit)と、車輪速センサ3と、メータECU4と、メータ内マルチインフォメーションディスプレイ5と、IG/SW制御システムECU6と、エンジンスイッチ7と、を備えて構成される。
【0016】
ABSECU2と、メータECU4と、IG/SW制御システムECU6と、は例えばCAN(Controller Area Network)等の通信規格により相互に接続される。なお、CANに換えて、LIN(Local Interconnect Network)に代表される低速なボデー系通信プロトコル、MOST(Media Oriented Systems Transport)に代表されるマルチメディア系通信プロトコル、FlexRay等のその他の適切な通信プロトコルを用いてもよい。
【0017】
ABSECU2は例えばCPU、ROM、RAMおよびそれらを接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが以下に述べる所定の処理を行うものである。ここでは、ABSECU2は、車両の例えば従動輪に対応して又は四輪全てに対応して設置された車輪速センサ3からの車輪速信号に基づいて車速信号を演算し、車速信号をCAN上に送信する。
【0018】
メータECU4も例えばCPU、ROM、RAMおよびそれらを接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが以下に述べる所定の処理を行うものである。ここでは、メータECU4は、ABSECU2から送信された車速信号を受信して、メータ内の図示しない速度計により又はメータ内マルチインフォメーションディスプレイ5の画面内の速度計により速度を表示する。
【0019】
IG/SW制御システムECU6も例えばCPU、ROM、RAMおよびそれらを接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが以下に述べる所定の処理を行い、車速検出手段6a、停止判定手段6b、計測手段6c、走行判定手段6d、制動判定手段6e、表示手段6fを構成するものである。
【0020】
エンジンスイッチ7は車両の運転席の右方に設置されて、押し操作により、IGOFF、ACC、IGONをIG/SW制御システムECU6の制御に基づいてこの順番にて遷移させて選択し、長押し操作(例えば3秒程度以上の押し継続)によりこれもIG/SW制御システムECU6の制御に基づいてここでは図示しないエンジンを始動又は再始動するSTARTを選択する選択手段を構成する。
【0021】
駆動源としての図示しないエンジンを駆動する駆動状態はエンジンスイッチ7である選択手段によりSTARTを選択することによって選択され、駆動源を停止する停止状態はACCに対応しており、これもエンジンスイッチ7の操作により選択される。
【0022】
なお、通常の停車中における始動又は再始動においては、運転者はシフトレバーをパーキングレンジとしてエンジンスイッチ7を長押しするものとし、走行中における再始動においては、運転者はシフトレバーをニュートラルレンジとしてエンジンスイッチ7を長押しするものとする。また、走行中における停止においてはエンジンスイッチ7を単に長押しするものとする。
【0023】
IG/SW制御システムECU6の車速検出手段6aはメータECU4から車速信号を受信して車速Vを検出する。停止判定手段6bは、車速Vが正値であってエンジンスイッチ7によりACCつまり停止状態が選択されたか否かを判定する。計測手段6cは、停止判定手段6bが肯定と判定してからの経過時間Tpと肯定と判定したときの車速Vである停止時車速VACCを計測する。走行判定手段6dは、経過時間Tpと停止時車速VACCに基づいて車両が走行中であるか停車中であるかの走行判定を行う。
【0024】
走行判定は車両で制動が行われているか否かにより場合分けして行う。IG/SW制御システムECU6の制動判定手段6eは、車両の制動装置により制動が行われているか否かを例えばABSECU2からの制動信号に基づいて判定する。なお、制動信号は例えばストップランプスイッチ等から別個にIG/SW制御システムECU6に入力されていても良い。
【0025】
制動判定手段6eにより肯定と判定される場合には、走行判定手段6dは、停止時車速VACCと車両において最大と想定される想定最大減速度α(例えば0.5G:運転者がブレーキペダルを一杯に踏む急ブレーキに相当する減速度)及び経過時間Tpから走行判定を行う。つまり、停車時間Tstop1=VACC/αを演算して、Tp>Tstop1であれば停車中であると判定し、Tp≦Tstop1であれば走行中であると判定する。
【0026】
制動判定手段6eにより否定と判定される場合には、停止時車速VACCと車両において最小と想定される想定最小減速度β(例えば車両の空走、堕行を伴う走行試験により求められる減速度)及び経過時間Tpから走行判定を行う。つまり、停車時間Tstop2=VACC/βを演算して、Tp>Tstop2であれば停車中であると判定し、Tp≦Tstop2であれば走行中であると判定する。
【0027】
IG/SW制御システムECU6の走行判定手段6dにより走行中であると判定される場合には、IG/SW制御システムECU6の表示手段6fは、エンジンすなわち駆動源の再始動を促す内容を表示するための、表示要求をメータECU4に送信し、メータECU4はこの表示要求に基づいて、例えば、「走行中の場合は、再始動時にはニュートラルレンジに入れてエンジンスイッチ7を長押ししてください。」というメッセージを含むテキストをメータ内マルチインフォメーションディスプレイ5の画面内に表示する。
【0028】
以下、本実施例の走行判定装置1の制御内容をフローチャートに基づいて説明する。図2は、本発明による走行判定装置1の制御内容を示すフローチャートである。
【0029】
ステップS1において、IG/SW制御システムECU6の車速検出手段6aは、ABSECU2が車輪速センサ3から得た車輪速信号から演算した車速信号を、メータECU4を介して取得して車速Vを検出する。
【0030】
ステップS2において、IG/SW制御システムECU6の停止判定手段6bは、車速Vが0km/hより大きく正値であって、エンジンスイッチ7によりACC(停止状態)が選択されているか否かを判定し、肯定であればステップS3にすすみ、否定であればENDの手前にすすむ。
【0031】
ステップS3において、IG/SW制御システムECU6の計測手段6cは、ステップS2において肯定と判定された時を基準として、その時の車速Vである停止時車速VACCを確定し、さらに、ステップS4において、IG/SW制御システムECU6の制動判定手段6eは、ABSECU2からの制動信号に基づいて、ブレーキオンがされているか否かを判定し、肯定であれば、ステップS5にすすみ、否定であればステップS10にすすむ。
【0032】
ステップS5において、IG/SW制御システムECU6の走行判定手段6dは、停止時車速VACCと想定最大減速度αの除算に基づいて制動時に停車するまでに要する停車時間Tstop1を演算し、ステップS6において、ステップS2からの経過時間TpとTstop1との比較を行い、Tp>Tstop1が成立するか否かを判定する。
【0033】
ステップS6において肯定と判定される場合には、ステップS7にすすみ、ステップS7において走行判定手段6dは、車両が停車中である旨の走行判定を下す。また、ステップS6において否定と判定される場合には、ステップS8にすすみ、ステップS8において、車両が走行中である旨の走行判定を下して、ステップS8の後のステップS9において、IG/SW制御システムECU6の表示手段6fは走行中のエンジンの再始動を促すメッセージを、メータECU4を介して、メータ内マルチインフォメーションディスプレイ5の画面内に表示させる。
【0034】
ステップS10において、IG/SW制御システムECU6の走行判定手段6dは、停止時車速VACCと想定最小減速度βの除算に基づいて空走、堕行時に停車するまでに要する停車時間Tstop2(>Tstop1)を演算し、ステップS11において、ステップS2からの経過時間TpとTstop2との比較を行い、Tp>Tstop2が成立するか否かを判定する。
【0035】
ステップS11において肯定と判定される場合には、ステップS12において走行判定手段6dは、車両が停車中であるとの走行判定を下し、ステップS11において否定と判定される場合には、ステップS13において、車両が走行中であるとの走行判定を下して、ステップS13の後のステップS14において、IG/SW制御システムECU6の表示手段6fは走行中のエンジンの再始動を促すメッセージを、メータECU4を介して、メータ内マルチインフォメーションディスプレイ5の画面内に表示させる。
【0036】
なお、STARTからENDまでのステップS1からステップS14までの処理は、IG/SW制御システムECU6の処理周期毎に繰り返し実行され、本発明の走行判定方法が実行される。
【0037】
以上述べた制御内容により実現される本実施例の走行判定装置1及び走行判定方法によれば、以下に述べるような作用効果を得ることができる。すなわち、走行中において何らかの不都合の発生に伴って運転者が意図的にエンジンスイッチ7によりエンジンを停止させた場合と、誤ってエンジンスイッチ7を操作することによってエンジンを停止させた場合の双方において、エンジンの再始動を促し、再始動時の具体的操作を示すメッセージを速やかに運転者に表示することができる。
【0038】
この表示に基づいて運転者はエンジンの再始動を速やかに行うことができる。特に走行中の再始動はニュートラルレンジを選択する必要があり、停車中の再始動ではパーキングレンジを選択することに対して操作が異なることに起因して、運転者が速やかに再始動を行うことが困難となることを防止することができる。
【0039】
特に本実施例の前提となる、走行中におけるエンジンの停止が行われた場合においては、車両の構造上、車速を取得することができなくなるが、本実施例によれば、ブレーキがオンであるか否かを場合分けして、オンである場合には想定最大減速度αを用いて停車時間Tstop1を演算し、オフである場合には想定最小減速度βを用いて停車時間Tstop2を演算した上で、停止時車速VACCを除算して停車時間を求め経過時間との比較を行うことで、車両が停車中であるか走行中であるかを容易に判定することができる。
【0040】
また、走行中においてエンジンが停止された状態が継続することにより、例えばブレーキ関係のアシスト力の付与や、ステアリングホイールの操舵アシスト力の付与等の、運転者の運転操作を補助する補助動作が継続して使用不可となる期間をなるべく短くすることができる。
【0041】
なお、上述した不都合とは、何らかの不具合により一時的にアクセルペダルの操作性が低下して、走行中においてエンジンを一時的に停止した後、速やかに不具合を除去する必要が生じる場合等を含む。
【0042】
以上本発明の好ましい実施例について詳細に説明したが、本発明は上述した実施例に制限されることなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形および置換を加えることができる。
【0043】
上述した実施例においては再始動を促すメッセージをテキストとして表示する例を示したが、このメッセージに換えて、又は併せて、例えば、ニュートラルレンジを示す「N」とエンジンスイッチ7の長押しを示す「PUSH」等の記号を適宜組み合わせて含むテルテール(ウォーニング用ランプ)をメータ内マルチインフォメーションディスプレイ5の画面内又は画面外に予め備えて、このテルテールを点灯又は点滅、あるいは表示色を青から赤等の警戒色に変更することとしてもよい。
【0044】
加えて、上述した実施例においては本発明を、エンジンスイッチ7を具備したオートマチックの車両に適用するものとしているが、エンジンスイッチ7を具備したマニュアル式の車両に適用することもでき、その場合には、走行中のエンジンの再始動は、クラッチを踏む操作とともに行う。
【0045】
この場合においては、上述した再始動を促すメッセージは例えば、「走行中の場合はクラッチを踏みながらエンジンスイッチ7を長押し操作してください。」とすることができる。
【産業上の利用可能性】
【0046】
本発明は、上述した不都合の発生に伴って運転者が意図的にエンジンスイッチを扱って、又は、運転者の誤操作によりエンジンスイッチが扱われて、走行中にエンジンが停止された場合に、ACCが選択されることにより車速を取得できなくなる状態でも、車両が走行中であるか停車中であるかをより正確に判定して、走行中であれば速やかに再始動を促すことを可能とすることができるので、走行中にエンジンを停止することが可能な乗用車、トラック、バス等の様々な車両に適用して有益なものである。
【符号の説明】
【0047】
1 走行判定装置
2 ABSECU
3 車輪速センサ
4 メータECU
5 メータ内マルチインフォメーションディスプレイ
6 IG/SW制御システムECU
6a 車速検出手段
6b 停止判定手段
6c 計測手段
6d 走行判定手段
6e 制動判定手段
6f 表示手段
7 エンジンスイッチ(選択手段)
【特許請求の範囲】
【請求項1】
車両の車速を検出する車速検出手段と、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択可能な選択手段と、前記車速が正値であって当該選択手段により前記停止状態が選択されたか否かを判定する停止判定手段と、当該停止判定手段が肯定と判定してからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測手段と、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定手段とを含むことを特徴とする走行判定装置。
【請求項2】
前記車両の制動装置により制動が行われているか否かを判定する制動判定手段を含み、当該制動判定手段により肯定と判定される場合には、前記停止時車速と前記車両において最大と想定される想定最大減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うことを特徴とする請求項1に記載の走行判定装置。
【請求項3】
前記制動判定手段により否定と判定される場合には、前記停止時車速と前記車両において最小と想定される想定最小減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うことを特徴とする請求項2に記載の走行判定装置。
【請求項4】
前記走行判定手段により前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示手段を含むことを特徴とする請求項1〜3のいずれか一項に記載の走行判定装置。
【請求項5】
車両の車速を検出する車速検出ステップと、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択する選択ステップと、前記車速が正値であって当該選択ステップにおいて前記停止状態が選択されたか否かを判定する停止判定ステップと、当該停止判定ステップにおいて肯定と判定されてからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測ステップと、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定ステップとを含むことを特徴とする走行判定方法。
【請求項6】
前記走行判定ステップにおいて前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示ステップを含むことを特徴とする請求項5に記載の走行判定方法。
【請求項7】
請求項5又は請求項6に記載の走行判定方法を実行するプログラム。
【請求項8】
請求項7に記載のプログラムを格納した媒体。
【請求項1】
車両の車速を検出する車速検出手段と、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択可能な選択手段と、前記車速が正値であって当該選択手段により前記停止状態が選択されたか否かを判定する停止判定手段と、当該停止判定手段が肯定と判定してからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測手段と、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定手段とを含むことを特徴とする走行判定装置。
【請求項2】
前記車両の制動装置により制動が行われているか否かを判定する制動判定手段を含み、当該制動判定手段により肯定と判定される場合には、前記停止時車速と前記車両において最大と想定される想定最大減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うことを特徴とする請求項1に記載の走行判定装置。
【請求項3】
前記制動判定手段により否定と判定される場合には、前記停止時車速と前記車両において最小と想定される想定最小減速度及び前記経過時間から前記走行判定を前記走行判定手段が行うことを特徴とする請求項2に記載の走行判定装置。
【請求項4】
前記走行判定手段により前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示手段を含むことを特徴とする請求項1〜3のいずれか一項に記載の走行判定装置。
【請求項5】
車両の車速を検出する車速検出ステップと、前記車両の駆動源を駆動する駆動状態と当該駆動源を停止する停止状態とのいずれかを選択する選択ステップと、前記車速が正値であって当該選択ステップにおいて前記停止状態が選択されたか否かを判定する停止判定ステップと、当該停止判定ステップにおいて肯定と判定されてからの経過時間と肯定と判定したときの前記車速である停止時車速を計測する計測ステップと、前記経過時間と前記停止時車速に基づいて前記車両が走行中であるか停車中であるかの走行判定を行う走行判定ステップとを含むことを特徴とする走行判定方法。
【請求項6】
前記走行判定ステップにおいて前記走行中であると判定される場合に、前記駆動源の再始動を促す内容を表示する表示ステップを含むことを特徴とする請求項5に記載の走行判定方法。
【請求項7】
請求項5又は請求項6に記載の走行判定方法を実行するプログラム。
【請求項8】
請求項7に記載のプログラムを格納した媒体。
【図1】


【図2】
【図2】
【公開番号】特開2013−113226(P2013−113226A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260815(P2011−260815)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]