
走行制御装置および車両
【課題】車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供すること。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行制御装置および車両に関し、特に、車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両に関するものである。
【背景技術】
【0002】
従来より、電動車椅子などの移動体の周辺に設定した所定領域に何らかの物体(障害物)が存在する場合に、その物体を回避するための反発力が仮想的に移動体に加えられたものとして、移動体の走行を制御することで、その物体との衝突を回避する技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−110711号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載される技術では、物体の衝突回避が行われる前記所定領域として、移動体(電動車椅子1)の外縁から一定距離(規準距離zo)離れた地点までの領域を設定している。
【0005】
しかしながら、この所定領域は、移動体が移動可能な移動可能領域の大きさを考慮しておらず、常に一定の大きさを持つ。そのため、移動可能領域が狭いところでは、移動可能領域よりも所定領域が大きくなり、所定領域内に存在する移動可能領域の端にあるもの(壁、ガードレール、縁石など)が障害物となって、移動体に大きな反発力が加えられる。これにより、車両に対して前方向から大きな反発力が加えられた場合には、移動体が前進可能であるにもかかわらず停止してしまったり、移動体に対して左右両方向から大きな反発力が加えられた場合には、移動体の操舵が左右に振られてしまい、安定して移動体を走行させることができない、という問題点があった。
【0006】
本発明は、上述した問題点を解決するためになされたものであり、車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供することを目的としている。
【課題を解決するための手段および発明の効果】
【0007】
この目的を達成するために請求項1記載の走行制御装置によれば、検出手段により検出された物体が、設定手段により設定された所定領域内に存在していると、その物体との衝突を回避するための仮想的な反発力が、その物体と車両との位置関係に基づいて算出手段により算出される。そして、その算出された反発力が車両に加えられたものとして、制御手段によって、車両の走行に伴う制御が行われる。これにより、物体が所定領域内に存在すると、その物体との衝突を回避するように反発力が仮想的に車両に加えられ、その反発力に基づいて車両の走行に伴う制御が行われるので、容易に且つ速やかにその物体を回避して車両を走行させることができる。
【0008】
また、取得手段により、車両が走行可能な領域に関する情報が取得され、その取得された情報により、前記所定領域が設定手段によって設定される。これにより、車両が走行可能な領域に合わせて所定領域が設定されるので、車両が走行可能な領域よりも所定領域が大きくなりすぎることを抑制できる。よって、車両が走行可能な領域の端にあるものにより、車両に大きな反発力が加えられることを抑制できるので、車両が前進可能であるにもかかわらず停止してしまったり、車両の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両を走行させることができる。従って、車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができるという効果がある。
【0009】
請求項2記載の走行制御装置によれば、請求項1記載の走行制御装置の奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域が狭いほど、所定領域の範囲が狭くなるように、その所定領域が設定手段によって設定される。これにより、たとえ車両の走行可能な領域が狭くても、所定領域が、その車両の走行可能な領域よりも大きくなりすぎることを抑制できる。よって、車両の走行可能な領域が狭くても、確実に、車両を安定して走行させることができるという効果がある。
【0010】
請求項3記載の走行制御装置によれば、請求項2記載の走行制御装置の奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域の車両の側面方向における幅が狭いほど、少なくとも所定領域における側面方向の幅が狭くなるように、所定領域が設定手段によって設定されるので、車両が走行可能な領域の車両の側面方向にある端を、所定領域の範囲の外縁の外側、その外縁上、若しくは、その外縁の少し内側に位置させることができる。これにより、車両が走行可能な領域の車両の側面方向にある端から、車両には反発力が加えられないか、反発力が車両に加えられたとしても、その大きさを小さく抑えることができる。よって、車両の操舵が左右に振られてしまうといった問題が生じることを抑制できるので、安定して車両を走行させることができるという効果がある。
【0011】
請求項4記載の走行制御装置によれば、請求項3記載の走行制御装置が奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域の車両の側面方向における幅が狭いほど、所定領域における側面方向の幅を狭くすると共に、所定領域における車両の前後方向における長さが狭くなるように、所定領域が設定手段によって設定される。車両が走行可能な領域の車両の側面方向における幅が狭いところを車両が走行する場合、通常は、速度を落として走行する。よって、車両が走行可能な領域の車両の側面方向における幅が狭いほど、所定領域における側面方向の幅と共に、所定領域における車両の前後方向における長さを狭くすることにより、車両の進行方向において遠くに物体が存在する場合に、必要以上に車両に対して反発力が加えられることを抑制できる。よって、車両をより遠くまで進行させることができるので、物体との衝突回避を行いつつ、車両をより安定して走行させることができるという効果がある。
【0012】
請求項5記載の走行制御装置によれば、請求項3記載の走行制御装置が奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域の車両の側面方向における幅が狭いほど、所定領域における側面方向の幅を狭くする一方、所定領域における車両の前後方向における長さが所定の長さに維持されるように、所定領域が設定手段によって設定される。これにより、車両が走行可能な領域の車両の側面方向における幅が狭い場所を車両が速い速度で進行するような場合があっても、早めに、車両の進行方向にある物体との回避動作を行うことができる。よって、車両を安定して走行させつつ、安全に物体と「の衝突回避を行うことができるという効果がある。
【0013】
請求項6記載の車両によれば、請求項1から5のいずれかに記載の走行制御装置が設けられているので、その車両において、対応する請求項に記載の走行制御装置と同様の効果を奏する。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態における車両を模式的に示した模式図である。
【図2】走行制御装置における物体の衝突回避方法を説明する説明図である。
【図3】走行制御装置を含む車両の電気的構成を示したブロック図である。
【図4】仮想バンパー領域の基準形状を模式的に示す模式図である。
【図5】バネ設定テーブルメモリの内容を模式的に示した模式図である。
【図6】物体回避処理を示すフローチャートである。
【図7】仮想バンパー設定処理を示すフローチャートである。
【図8】道路幅の取得方法を説明する説明図である。
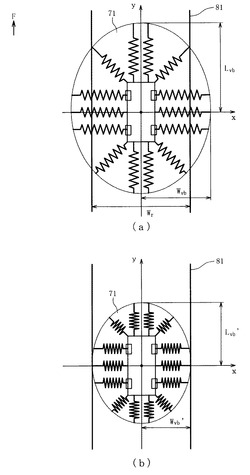
【図9】(a)は、仮想バンパー領域が道路幅を超えている状態を示す図であり、(b)は、外郭形成処理を説明する図である。
【図10】物体回避実行処理を示すフローチャートである。
【図11】車両左右方向の反発力が加えられた場合において生じる反モーメント力によって取り得るべき車両の操舵角を算出する場合に用いるパラメータを説明する図である。
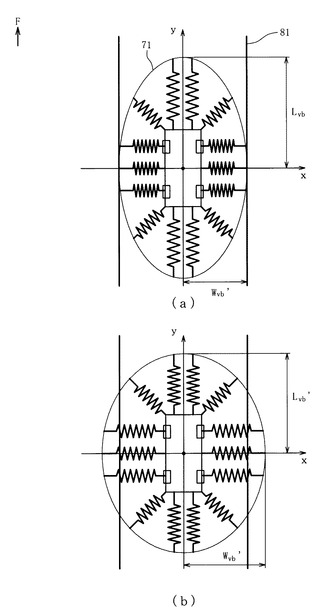
【図12】(a),(b)は、本発明を適用した仮想バンパー領域の変形例を示す図である。
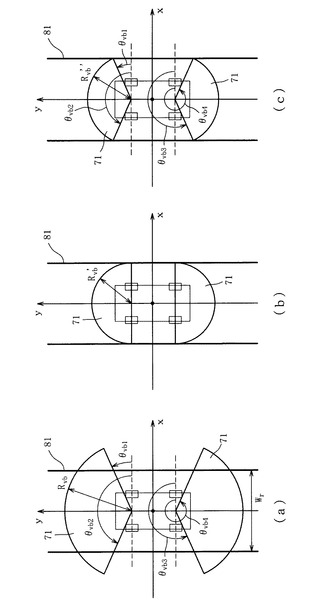
【図13】(a),(b),(c)は、本発明を適用した仮想バンパー領域の変形例を示す図である。
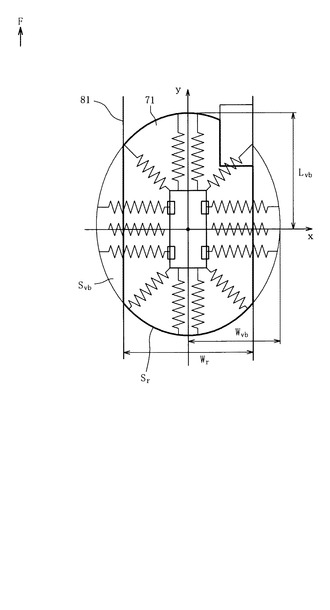
【図14】本発明を適用した仮想バンパー領域の変形例を示す図である。
【発明を実施するための形態】
【0015】
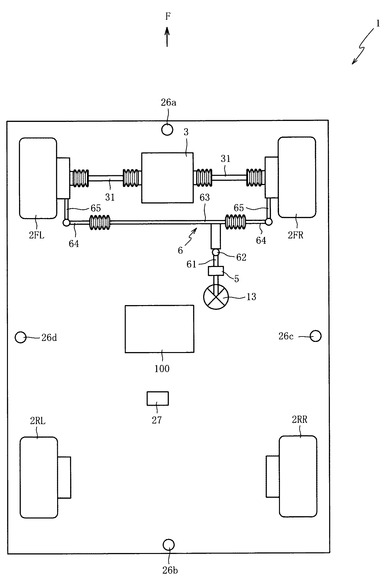
以下、本発明を実施するための形態について添付図面を参照して説明する。図1は、本発明の一実施形態である走行制御装置100を有する車両1を模式的に示した模式図である。
【0016】
まず、図1を参照して、車両1の構成について説明する。車両1は、その車両1が狭い領域を走行する場合においても、物体80の衝突回避を行いつつ、車両1を安定して走行させることができるように構成されている。
【0017】
なお、図1において、矢印Fによって示される方向が車両1の前方向を示している。この矢印Fは、その他の図面においても同様に、矢印Fによって示される方向を車両1の前方向として示している。また、以下の説明において、車両1が矢印F方向に進行する場合を「前進」、車両1が矢印F方向とは逆方向に進行する場合を「後退」と称す。
【0018】
走行制御装置100は、車両1の走行を制御するコンピュータ装置である。この走行制御装置100によって、物体80の衝突回避を行いつつ、車両1を安定して走行させている。
【0019】
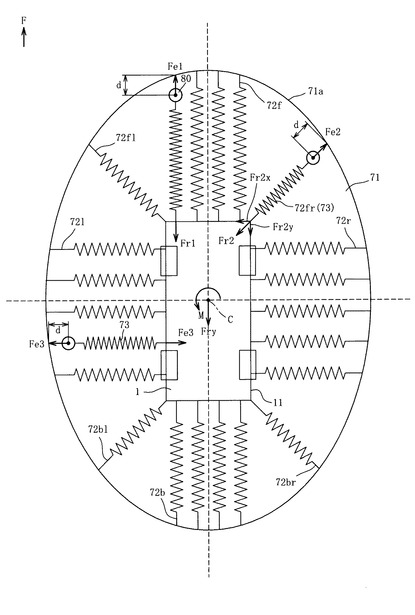
ここで、図2を参照して、走行制御装置100における物体の衝突回避の方法について、その概略を説明する。図2は、走行制御装置100における物体の衝突回避方法を説明する説明図である。
【0020】
走行制御装置100は、車両1周囲に、衝突を避けるべき物体を検出する領域として、仮想バンパー領域71を設定(形成)する。走行制御装置100は、その仮想バンパー領域71に、複数のバネ72を仮想的に並設することで、仮想バンパーを構成することを想定する。
【0021】
このとき、各バネ72は、いずれも、一端を車両1の外周11に取着した状態で、他端が仮想バンパー領域71の外縁71aに位置するように、仮想バンパー領域71に並設されることを走行制御装置100にて想定する。また、各バネ72の一端は、車両1の外周11において、10cm間隔で取着されることを走行制御装置100にて想定する。
【0022】
更に、車両1の前方側または後方側の仮想バンパー領域71に配設されるバネ72f,72bは、一端が車両1の前方先端(前端)または後方先端(後端)に取着された状態で、バネの長さ方向が車両1の前後方向と平行となるように配設され、他端は車両1前方側または後方側の外縁71aに位置されることを走行制御装置100にて想定する。
【0023】
車両1の右側または左側の仮想バンパー領域71に配設されるバネ72r,72lは、一端が車両1の右側面または左側面に取着された状態で、バネの長さ方向が車両1の左右方向と平行となるように配設され、他端は車両1右側または左側の外縁71aに位置されることを想定する。
【0024】
また、車両1の右前コーナー,左前コーナー,左後コーナー,右後コーナー側の仮想バンパー領域71に配設されるバネ72fr,72fl,72bl,72brは、一端が車両1の対応するコーナー部分に取着された状態で、バネの長さ方向が、車両1の右前方向,左前方向,左後方向または右後方向となるように配設され、他端が車両1の左前コーナー,左後コーナー,右後コーナー側の外縁71aに位置されることを想定する。
【0025】
走行制御装置100は、車両1に設けられた後述の第1〜第4カメラ26a〜26d(図1参照)によって取得された画像から、車両1の周辺にある物体の位置を判断し、以下に従って、その物体80との衝突を回避するための反発力Frを算出する。
【0026】
即ち、走行制御装置100は、仮想バンパー領域71内に仮想的に並設されたバネ72のうち、物体80の存在によって収縮されたバネ73を検索する。そして、収縮されたバネ73がある場合、仮想バンパー領域71内に物体80が存在するとして、そのバネ73の収縮量dを物体80と車両1との位置関係から判断し、その収縮量dに基づいて、バネ73に生じる弾性力Feを以下の式(1)により算出する。なお、以下の式(1)において、knはバネ73のバネ定数である。
【0027】
Fe=kn×d ・・・(1)
走行制御装置100は、弾性力Feの反作用として、その弾性力Feが発生したバネ73の一端が取着されている車両1上の点に、反発力Frが、バネ73の長さ方向に車両1の内側に向けて加えられるものとする。
【0028】
例えば、図2に示すように、物体80によって収縮されたバネ73が、車両1の前方に配設されたバネ72fの一つであった場合、そのバネ72fが取着された車両1上の点に、車両1に対して後向きの反発力Fr1が車両1に加えられる。同様に、バネ73が車両1の左側または右前方向に配設されたバネ72l,72frの一つであった場合、そのバネ72l又はバネ72frが取着された車両1上の点に、車両1に対して右向き又は左後向きの反発力Fr2又はFr3が車両1に加えられる。つまり、各バネ72が取着される車両1の外周11上の点が、反発力Frが加えられる作用点となる。
【0029】
走行制御装置100は、各バネ72(73)から加えられた反発力Frの前後方向成分(車両1の前後方向と同じ方向の成分)を合成して、車両1の重心Cに加えられる車両1の前後方向の反発力Fryを算出する。また、各バネ72(73)から加えられた反発力Frの左右方向成分(車両1の前後方向に対する左右方向と同じ方向の成分)から、車両1の重心Cに加えられる反モーメント力Mを算出する。
【0030】
そして、走行制御装置100は、車両1の重心Cに加えられた前後方向の反発力Fryに基づいて、その反発力Fryによって生じる車両1の加速度を算出する。走行制御装置100には、車両1に設けられたアクセルペダル(図示せず)の踏み込み量に関する情報も入力される。走行制御装置100は、現在の車両1の速度と、運転者によって踏み込まれたアクセルペダルの踏み込み量と、前後方向の反発力Fryによって生じる車両1の加速度とから、目標とすべき車両速度を決定し、その目標とすべき車両速度を示す制御信号を、後述する車輪駆動装置3(図1参照)へ送信する。これにより、車両1が、前後方向の反発力Fryによって生じる車両1の加速度を反映させた速度で走行するように、車両1の走行の制御が行われる。
【0031】
また、走行制御装置100は、その算出した反モーメント力Mに応じて車両1の操舵角を算出して、その操舵角を示す制御信号を、後述する操舵駆動装置5(図1参照)へ送信する。これにより、車両1が、反発力Frによって生じる反モーメント力を反映させた操舵角で走行するように、車両1の走行の制御が行われる。
【0032】
このように、走行制御装置100は、仮想バンパー領域71内に存在する物体との衝突を回避するために、仮想的に並設したバネ72の一部(バネ73)が物体80によって収縮されたものとし、そのバネ73の弾性力Feを算出して、その反作用として反発力Frが車両1に加えたものとすることで、その反発力Frに基づいて、車両1の速度や操舵角を制御する。これにより、容易に且つ速やかに、その物体80を回避しながら車両1を走行させることができる。
【0033】
また、物体80が車両1に近いほど、仮想バンパー領域71内に想定上並設されているバネ72の一部(バネ73)がその物体80によって大きく縮められる。バネの弾性力Feはバネの収縮量(縮み量)が大きいほど大きいので、物体80が車両1に近いほど、大きな反発力Frを車両1に加えることができる。よって、物体80が車両1に近いほど大きくなる反発力Frにより、確実に物体80との衝突を回避できる。
【0034】
なお、走行制御装置100には、車両1に設けられ、運転者によって回転操作される後述のステアリングホイール13(図1参照)から、ステアリングホイール13の回転角速度を示す情報も入力されている。反力Frが車両1に仮想的に加えられていない場合、即ち、仮想バンパー領域71内に物体が存在しない場合には、走行制御装置100は、ステアリングホイール13の回転角速度を積分して得られるステアリングホイール13の操舵角に応じて車両1の操舵角を決定し、その操舵角を示す制御信号を操舵駆動装置5へ送信する。
【0035】
図1に戻って、車両1の構成について説明を続ける。車両1は、走行制御装置100の他に、複数(本実施形態では4輪)の車輪2FL,2FR,2RL,2RRと、それら複数の車輪2FL〜2RRの内の一部(本実施形態では、左右の前輪2FL,2FR)を回転駆動する車輪駆動装置3と、複数の車輪2FL〜2RRの内の一部(本実施形態では、左右の前輪2FL,2FR)を操舵するステアリング装置6及び操舵駆動装置5と、運転者から車両1の操舵方向の指示を受け付けるステアリングホイール13と、車両1の周囲を第1〜第4カメラ26a〜26dと、車両1の現在位置を検出する現在位置検出装置27とを主に有している。
【0036】
車輪2FL,2FRは、車両1の前方側に配置される左右の前輪であり、車輪駆動装置3によって回転駆動される駆動輪として構成されている。一方、車輪2RL,2RRは、車両1の後方側に配置される左右の後輪であり、車両1の走行に伴って従動する従動輪として構成されている。
【0037】
車輪駆動装置3は、左右の前輪2FL,2FRに回転駆動力を付与するものであり、デファレンシャルギヤ(図示せず)及び一対のドライブシャフト31を介して左右の前輪2FL,2FRに接続されている。車輪駆動装置3は、走行制御装置100から通知された、目標とすべき車両速度を示す制御信号に基づき、ドライブシャフト31を介して左右の前輪2FL,2FRに回転駆動力を付与する。これにより、車両1は、走行制御装置100から通知された車両速度に応じた速度で走行する。
【0038】
なお、車輪駆動装置3は、走行制御装置100から、その走行制御装置100によって算出された反発力Frの車両1の前後方向の反発力Frfによって生じる車両1の加速度を示す制御信号を受け取り、その車両1の加速度と、運転者によって踏み込まれたアクセルペダルの踏み込み量と、現在の車両1の速度とから目標とすべき車両速度を算出して、その目標とすべき車両速度となるように、ドライブシャフト31を介して左右の前輪2FL,2FRに回転駆動力を付与してもよい。
【0039】
操舵駆動装置5は、左右の前輪2FL,2FRを操舵するための装置であり、ステアリング装置6に回転駆動力を付与する電動モータ5a(図3参照)を備えて構成されている。ステアリング装置6は、ステアリングシャフト61と、フックジョイント62と、ステアリングギヤ63と、タイロッド64と、ナックルアーム65とを主に備えて構成されている。なお、ステアリング装置6は、ステアリングギヤ63がピニオン(図示せず)とラック(図示せず)とを備えたラックアンドピニオン機構によって構成されている。
【0040】
操舵駆動装置5は、走行制御装置100から車両1の操舵角を示す制御信号を受信すると、その操舵角に応じて電動モータ5aを駆動し、電動モータ5aの回転駆動力がステアリング装置6のステアリングシャフト61に付与される。その回転駆動力は、ステアリングシャフト61を介してフックジョイント62に伝達されると共にフックジョイント62によって角度を変えられ、ステアリングギヤ63のピニオンに回転運動として伝達される。そして、ピニオンに伝達された回転運動はラックの直線運動に変換され、ラックが直線運動することで、ラックの両端に接続されたタイロッド64が移動し、ナックルアーム65を介して前輪2FL,2FRが操舵される。これにより、車両1は、走行制御装置100から指示された操舵角で、前輪2FL,2FRが操舵される。
【0041】
ステアリングホイール13は、車両1の搭乗者から回転操作されることで、車両1の操舵方向の指示を受け付けるものである。ステアリングホイール13は、搭乗者によって回転操作されると、その回転角速度を走行制御装置100へ送信する。なお、ステアリングホイール13は、搭乗者によって回転操作された回転角を走行制御装置100へ送信してもよい。そして、走行制御装置100が、ステアリングホイール13から取得した回転角を微分して、回転角速度を算出してもよい。
【0042】
第1〜第4カメラ26a〜26dは、車両1の周囲を撮像するための撮像装置であり、CCDイメージセンサや、CMOSイメージセンサなどの撮像素子が搭載されたデジタルカメラで構成されている。各第1〜第4カメラ26a〜26dは、撮像した画像を画像データに変換して走行制御装置100へ出力する。
【0043】
第1カメラ26aは、車両1の前方中央に配設され、第2カメラ26bは、車両1の後方中央に配設され、第3カメラ26cは、車両1の右側面のサイドミラー(図示せず)に配設され、第4カメラ26dは、車両1の左側面のサイドミラー(図示せず)に配設されている。本実施形態では、4つの第1〜第4カメラ26a〜26dにより、車両1を中心として車両1の前後方向に少なくとも30mと、車両1を中心として車両1の左右方向に少なくとも15mの範囲を撮像可能に構成されている。なお、第1〜第4カメラ26a〜26dによって撮像可能な範囲は、適宜設定されるものであってよい。
【0044】
各第1〜第4カメラ26a〜26dは、撮像した画像を画像データに変換して走行制御装置100へ出力する。走行制御装置100へ出力された画像データは、その走行制御装置100によって解析され、車両1の周囲に存在する物体と、車両1を基準としたその物体の位置とが検出される。そして、検出された物体の位置から、仮想バンパー領域71内に物体が存在するか否かが判断される。また、仮想バンパー領域71内に物体が存在する場合には、走行制御装置100において、その物体の位置から収縮されるバネ73(図2参照)が検索され、そのバネ73にかかる弾性力が算出されて、車両1に加えられる反発力が求められる。
【0045】
現在位置検出装置27は、車両1の現在位置(緯度、経度からなる絶対座標値)を検出するためのものである。この現在位置検出装置27は、人工衛星を利用して車両の位置を測定するGPS(Global Positioning System)受信装置、地磁気を検出して車両の方位を求める地磁気センサ、ジャイロセンサ、車速センサの1又は複数が使用される。更には、後述する地図情報DB92c(図3参照)と走行軌道とのマップマッチング或いは地図情報DB92cと第1〜第4カメラ26a〜26dでとらえた構造物や標識等とのマッチングにより現在位置を同定してもよい。
【0046】
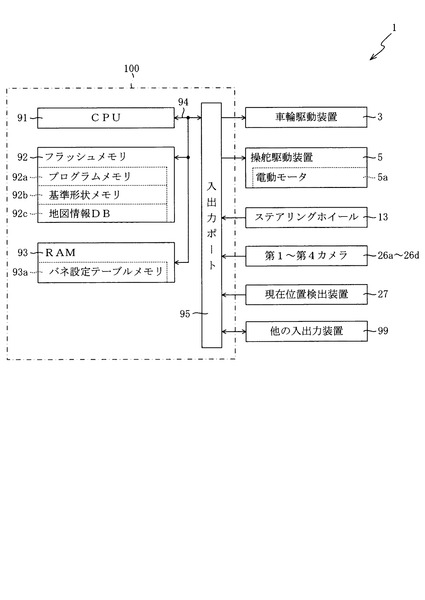
次いで、図3を参照して、走行制御装置100の詳細構成について説明する。図3は、走行制御装置100を含む車両1の電気的構成を示したブロック図である。
【0047】
走行制御装置100は、CPU91、フラッシュメモリ92及びRAM93を有しており、それらがバスライン94を介して入出力ポート95に接続されている。入出力ポート95には、上述した、車輪駆動装置3,操舵駆動装置5、ステアリングホイール13、第1〜第4カメラ26a〜26d、現在位置検出装置27、及び、その他の入出力装置99などが接続されている。
【0048】
CPU91は、入出力ポート95に接続されたステアリングホイール13、第1〜第4カメラ26a〜26d、現在位置検出装置27等から送信された各種の情報に基づいて、車輪駆動装置3や操舵駆動装置5等を制御する演算装置である。
【0049】
フラッシュメモリ92は、CPU91によって実行される制御プログラムや固定値データ等を記憶するための書き換え可能な不揮発性のメモリである。このフラッシュメモリ92には、プログラムメモリ92a、基準形状メモリ92b、及び、地図情報DB92cが設けられている。
【0050】
プログラムメモリ92aは、CPU91にて実行される各種のプログラムが格納されたフラッシュメモリ92上の領域である。後述する図6のフローチャートに示す物体回避処理、図7のフローチャートに示す仮想バンパー設定処理、図10のフローチャートに示す物体回避実行処理をCPU91にて実行されるための各プログラムは、このプログラムメモリ92aに格納されている。CPU91は、このプログラムメモリ92aに格納された各プログラムに従って各種処理を実行することで、車両1が狭い領域を走行する場合においても、物体80の衝突回避を行いつつ、車両1が安定して走行するように、車両1の走行を制御する。
【0051】
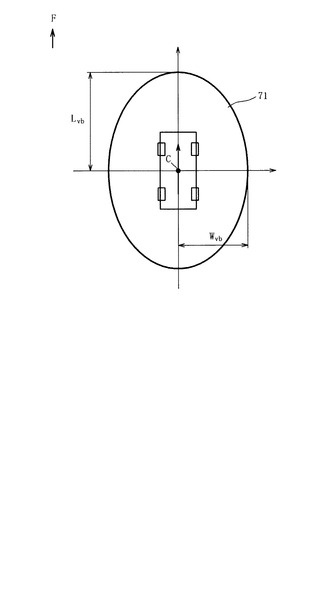
基準形状メモリ92bは、仮想バンパー領域71の基準形状を規定するパラメータを格納するメモリである。ここで、図4を参照して、仮想バンパー領域71の基準形状について説明する。図4は、仮想バンパー領域71の基準形状を模式的に示す模式図である。
【0052】
仮想バンパー領域71の基準形状は、図4に示す通り、車両1の重心Cを中心とし、車両1の前後方向を長軸、車両1の左右方向(側面方向)を短軸として、短径をWvb、長径をLvbとする楕円である。基準形状メモリ92bには、この短径Wvb及び長径Lvbの大きさが格納されている。
【0053】
詳細については図7を参照して後述するが、走行制御装置100(CPU91)では、所定時間間隔毎(本実施形態では、50ミリ秒毎)に、第1〜第4カメラ26a〜26dによって取得した画像データに基づいて、車両1が走行する道路(或いは場所)の幅(車両1の左右方向における該道路等の幅であり、以下、単に「道路幅」と称す)Wrを検出する。そして、その道路幅Wrが基準形状の短径Wvbの2倍の長さよりも短い場合、即ち、仮想バンパー領域71が道路幅を超える場合は、仮想バンパー領域71の幅(以下「仮想バンパー幅」と称す)となる短径が道路幅Wrの半分となるように、仮想バンパー領域71を形成する。
【0054】
なお、車両1が複数車線の道路を走行している場合、車両1が走行している車線の幅を道路幅Wrとしてもよい。また、車両1が道路中央よりも左側または右側を通用するような場合は、その道路のうち車両1が走行可能な幅を道路幅Wrとしてもよい。また、工事や駐停車中の車両によって、道路の一部が通行不能な場合は、車両1が走行可能な領域の幅を、道路幅Wrとしてもよい。
【0055】
また、基準形状メモリ92bに格納された短径Wvb、長径Lvbの値は、車両1に設けられた操作パネル(図示せず)を運転者(搭乗者)が操作することにより、その運転者(搭乗者)によって設定変更可能に構成されてもよい。
【0056】
また、本実施形態では、基準形状の楕円の中心を車両1の重心Cとする場合について説明するが、必ずしも車両1の重心Cとする必要はなく、任意の場所に設定されてよい。例えば、車両1中央の前後軸と、後輪軸(後輪2RL,2RRを結んだ直線)との交点に、その楕円の中心としてもよい。また、その楕円の中心位置(座標)も基準形状メモリ92bに格納するようにし、運転者(搭乗者)が操作パネル(図示せず)を操作することにより、その運転者(搭乗者)によって楕円の中心位置(座標)を設定変更可能に構成してもよい。
【0057】
図3に戻り説明を続ける。地図情報DB92cは、地図および道路に関する情報が格納されたデータベースである。この地図情報DB92cでは、各種施設の場所や、各種道路の位置などが、緯度、経度からなる絶対座標値によって示されている。また、地図情報DB92cでは、各道路に対して設定すべき仮想バンパー領域71の仮想バンパー幅(短径の2倍の大きさ)を規定している。
【0058】
走行制御装置100は、現在位置検出装置27によって検出された車両1の現在位置から、現在走行している道路等を特定し、その現在走行中の道路に対して設定すべき仮想バンパー領域71の仮想バンパー幅(短径の2倍の大きさ)を地図情報DB92cより取得する。
【0059】
そして、第1〜第4カメラ26a〜26dが設置されていなかったり、故障していたりして、第1〜第4カメラ26a〜26dによって道路幅Wrを取得できない場合、地図情報DB92cより取得した仮想バンパー幅となるように、仮想バンパー領域71を設定する。
【0060】
また、第1〜第4カメラ26a〜26dによって取得した道路幅Wrに基づいて算出した仮想バンパー幅が、地図情報DB92cより取得した仮想バンパー幅よりも大きい場合にも、地図情報DB92cより取得した仮想バンパー幅となるように、仮想バンパー領域71を設定する。一般的に、道路の状況に応じて予め各種地図情報DB92cにおいて規定されている仮想バンパー幅よりも、第1〜第4カメラ26a〜26dによって取得した道路幅Wrに基づいて算出した仮想バンパー幅が大きくなることはなく、第1〜第4カメラ26a〜26dによって取得した道路幅Wrが誤っている可能性が高い。そこで、この場合には、地図情報DB92cより取得した仮想バンパー幅となるように、仮想バンパー領域71を設定することで、道路等の実情により合った仮想バンパー領域71を設定できる。
【0061】
なお、車両1にナビゲーション装置が別途設けられている場合、走行制御装置100は、フラッシュメモリ92に地図情報DB92cを格納することに代えて、そのナビゲーション装置が有する地図情報DBを用いて上記の処理を行うようにしてもよい。この場合、ナビゲーション装置が走行制御装置100の入出力ポート95に接続され、走行制御装置100が入出力ポート95を介してナビゲーション装置より地図情報DBに格納された各種情報を取得するように構成すればよい。
【0062】
RAM93は、書き換え可能な揮発性のメモリであり、CPU91によって実行される制御プログラムの実行時に各種のデータを一時的に記憶するためのメモリである。RAM93には、バネ設定テーブルメモリ93aが設けられている。
【0063】
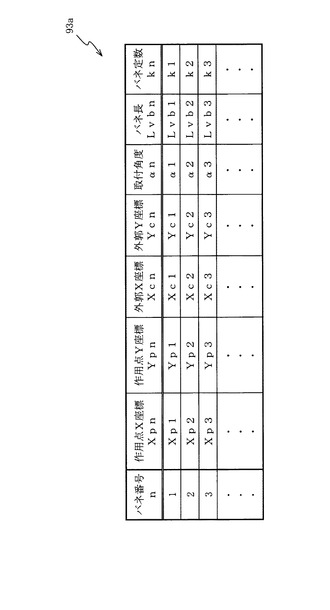
バネ設定テーブルメモリ93aは、仮想バンパー領域71に仮想的に並設した複数のバネ72に関する情報を記憶するメモリである。ここで、図5を参照して、バネ設定テーブルメモリ93aの詳細について説明する。図5は、バネ設定テーブルメモリ93aの内容を模式的に示した模式図である。
【0064】
走行制御装置100(CPU91)は、仮想バンパー領域71を設定(形成)すると、その仮想バンパー領域71内に複数のバネ72を仮想的に並設する。その並設されたバネ72の情報として、図5に示す通り、バネ72毎に、バネ72の識別情報であるバネ番号nに対応付けて、そのバネ番号nで示されるバネの作用点X座標Xpnと、作用点Y座標Ypnと、外郭X座標Xcnと、外郭Y座標Ycnと、取付角度αnと、バネ長Lvbnと、バネ定数knとを格納する。
【0065】
バネ番号nは、並設されたバネ1本1本を識別するための情報である。本実施形態では、車両1の前端に取着されたバネ72fの一番右側になるバネのバネ番号nを1とし、バネ番号1のバネから順に、反時計回りに各バネ72に対してバネ番号nを1ずつ大きくしながら、バネ番号nを割り振る。
【0066】
作用点X座標Xpn,作用点Y座標Ypnは、バネ番号nのバネにおける一端が、車両1に取着される点、つまり、そのバネの反発力Frが作用する作用点の座標を示すものである。本実施形態では、車両1中央の前後軸をY軸(車両1の前方向、即ち、矢印Fで示す方向を正方向)とし、車両1の重心を通る左右軸(後輪軸と平行な軸)をX軸(車両1の右方向を正方向)として、X軸とY軸との交点を原点とした座標系で、作用点X座標Xpn,作用点Y座標Ypnを表す。
【0067】
外郭X座標Xcn,外郭Y座標Ycnは、バネ番号nのバネ72における他端、つまり、仮想バンパー領域71の外郭に位置する他端の座標を示すものである。本実施形態では、上記の作用点X座標Xpn,作用点Y座標Ypnと同じ座標系で、外郭X座標Xcn,外郭Y座標Ycnを表す。
【0068】
取付角度αnは、バネ番号nのバネ72の車両1に対する取付角度を示すものである。ここでは、車両1中央の前後軸から車両1の右方向に伸びる半直線と、各バネ72の一端と他端とを結んだ直線とのなす角度を取付角度αnとして規定する。
【0069】
つまり、車両1の前端から前方側に配設されたバネ72fは、取付角度αnが90°となる。また、車両1の左側面から左側に配設されたバネ72l,車両1の後端から後方側に配設されたバネ72b,車両1の右側面から右側に配設されたバネ72rは、それぞれ、取付角度αnが180°,270°,0°となる。
【0070】
また、車両1の右前コーナーから右前方向に配設されるバネ72fr,車両1の左前コーナーから左前方向に配設されるバネ72fl,車両1の左後コーナーから左後方向に配設されるバネ72bl,車両1の右後コーナーから右後方向に配設されるバネ72brの取付角度αnは、それぞれ、0〜90°,90°〜180°,180°〜270°,270°〜360°の範囲内で次の式(2)で定まる角度となる。
【0071】
αn=tan−1((Ypn−Ycn)/(Xpn−Xcn)) ・・・(2)
バネ長Lvbnは、バネ番号nのバネ72の自然長(バネ72を伸縮させない状態におけるバネ72の長さ)を示すものである。各バネ72のバネ長Lvbnは、バネ72の一端が接続される作用点(作用点X座標Xpn,作用点Y座標Ypnで示される点)と、バネ72の他端が位置する外郭X座標Xcn,外郭Y座標Ycnで示される点との距離によって算出される。
【0072】
バネ定数knは、バネ番号nのバネ72のバネ定数を示すものである。なお、本実施形態では、すべてのバネ72において、以下のようにバネ定数knを設定する。即ち、すべてのバネ72において限界長さLlimまで収縮可能であり、限界長さLlimを超えて収縮されることはないものとした場合、各バネ72が、限界長さLlimまで収縮された場合に、それぞれのバネによって発生する弾性力Feがすべて同じ大きさとなるように、バネ定数knを設定する。これは、仮想バンパー領域71が縮小される場合についても同じである。
【0073】
具体的には、長さLvbbase、バネ定数kbaseである基準バネを想定したうえで、バネ長がLvbnであるバネ番号nのバネ定数knを以下の式(3)により算出してもよい。
【0074】
kn=kbase×(Lvbbase−Llim)/(Lvbn−Llim) ・・・(3)
これにより、いずれのバネも、限界長さLlimまで縮小された場合に発生する弾性力Fe=kbase×(Lvbbase−Llim)となり、同じ大きさの弾性力が発生する。
【0075】
よって、仮想バンパー領域71が縮小された場合であっても、車両1の近くに物体80が存在する場合には、基準形状の仮想バンパー領域71と同じ反発力を車両1に加えることができる。よって、安全に物体80の衝突回避を行うことができる。
【0076】
なお、基準バネのバネ長Lvbbaseやバネ定数kbaseの大きさは、操作パネル(図示せず)を運転者(搭乗者)が操作することにより、その運転者(搭乗者)によって設定変更可能に構成されてもよい。
【0077】
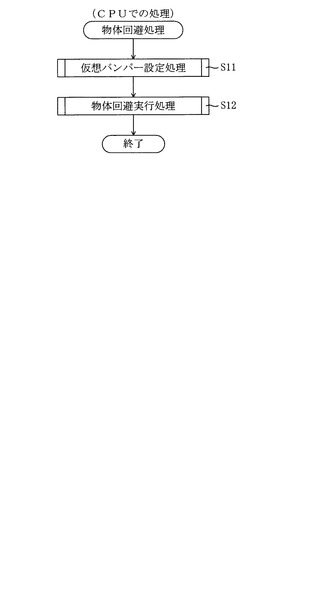
次いで、図6〜図11までのフローチャートと模式図とを参照して、車両1に搭載された走行制御装置100のCPU91により実行される物体回避処理について説明する。まず、図6は、この物体回避処理を示すフローチャートである。
【0078】
物体回避処理は、所定時間間隔(本実施形態では50ミリ秒)でCPU91により実行される処理で、車両1の進路方向に基づいて仮想バンパー領域71を設定(形成)し、その設定した仮想バンパー領域71内に物体80が存在する場合には、その物体80との衝突回避動を行う処理である。
【0079】
この物体回避処理が実行されると、CPU91は、まず、仮想バンパー設定処理を実行する(S11)。この仮想バンパー設定処理では、車両1が走行している道路の道路幅Wrに応じて、仮想バンパー領域71を形成し、設定する処理を行う。この仮想バンパー設定処理の詳細については、図7を参照して後述する。
【0080】
仮想バンパー設定処理の次には、物体回避実行処理を行う(S12)。この物体回避実行処理では、仮想バンパー領域71内に物体80が存在する場合に、その仮想バンパー領域71内に仮想的に並設させた複数のバネ72の一部(バネ73)が、物体80によって収縮されたとして、そのバネ73に生じる弾性力Feの反作用として車両1に反発力Frを加え、車両1の走行を制御する処理を行う。この物体回避実行処理の詳細については、図10を参照して後述する。
【0081】
物体回避処理は、物体回避実行処理の終了後、その処理を終了する。
【0082】
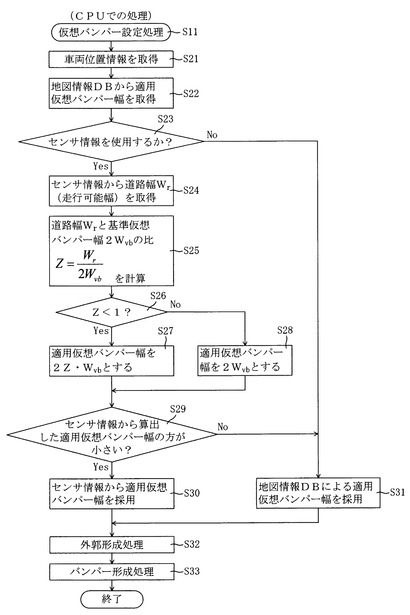
次に、図7を参照して、図6の物体回避処理の一処理である仮想バンパー設定処理(S11)について説明する。図7は、この仮想バンパー設定処理を示すフローチャートである。
【0083】
仮想バンパー設定処理が実行されると、CPU91は、まず、車両1の現在位置に関する情報を現在位置検出手段27より取得する(S21)。次いで、S21の処理で取得した車両1の現在位置より、現在走行している道路等を地図情報DB92bに基づいて判断し、その道路に対して規定されている、仮想バンパー領域71の仮想バンパー幅(ここでは「適用仮想バンパー幅」と称す)を地図情報DB92bより取得する(S22)。
【0084】
次に、第1〜第4カメラ26a〜26dが設置されているか否か、及び、第1〜第4カメラ26a〜26dが故障していないか否かを判断し、第1〜第4カメラ26a〜26dによって撮像された画像の画像データによって得られる車両1の周辺情報(以下「センサ情報」と称す)を使用するか否かを判断する(S23)。
【0085】
その結果、センサ情報を使用すると判断された場合は(S23:Yes)、センサ情報から道路幅(走行可能幅)Wrを取得する(S24)。
【0086】
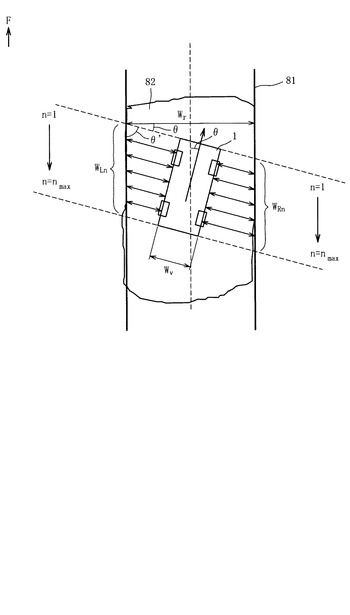
ここで、図8を参照して、道路幅Wrの取得方法について説明する。図8は、道路幅Wrの取得方法を説明する説明図である。走行制御装置100(CPU91)では、センサ情報82を第1〜第4カメラ26a〜26dから取得すると、車両1の左右方向における現在走行中の道路端の位置を検出する。そして、車両1の前方向から後方向に向けて、所定距離間隔毎に、車両1の右側面から車両1の右側の道路端までの距離である右側距離WRnと、車両1の左側面から車両1の左側の道路端までの距離である右側距離WLnとを検出する。
【0087】
ここで、nは1〜nmaxをとる自然数であり、車両1の前端における右側距離および左側距離がWR1及びWL1となる。また、車両1の後端における右側距離および左側距離がWRnmax及びWLnmaxとなる。
【0088】
そして、道路幅Wrは、以下の式によって算出される。なお、以下の式において、Wvは車両1の車幅である。また、θは、図8に示す通り、道路等の延設方向と車両1の前後方向とのなす角度であり、車両1が走行している道路等の延設方向に対する車両1の向きを示すものである。
【0089】
【数1】

ここで、角度θは、次のように算出する。第1〜第4カメラ26a〜26dから取得したセンサ情報82に基づき、車両1の左方向(右方向でも可)における現在走行中の道路端(以下「道路左端」と称す)の位置を検出すると、その検出位置から道路左端を結んだ直線の近似式を算出する。また、センサ情報82により、車両1の前端を結んだ直線の近似式も算出する。そして、道路左端を結んだ直線の近似式と車両1の前端を結んだ直線の近似式とから、道路左端を結んだ直線と車両1の前端を結んだ直線とのなす角度θ’を算出する。その算出した角度θ’から90°を引いた値を算出する。この角度θ’から90°を引いた値が、角度θとなる。
【0090】
なお、角度θは、車両1に設けられたGPSや、姿勢センサ(ジャイロセンサ)などに基づいて検出される車両1の絶対位置情報から、車両1が走行している道路等の延設方向に対する車両1の向きを判断して取得してもよい。
【0091】
図7に戻り説明を続ける。S24の処理に次いで、道路幅Wrと、基準形状での仮想バンパー領域71の仮想バンパー幅(短径Wvbの2倍。以下「基準仮想バンパー幅」と称す。)との比であるZ=Wr/(2Wvb)を計算する(S25)。
【0092】
そして、S25の処理で計算した比Zが1より小さいか否かを判断する(S26)。その結果、比Zが1よりも小さい場合は(S26:Yes)、道路幅Wrよりも基準仮想バンパー幅(2Wvb)の方が大きく、基準形状の仮想バンパー領域71が道路幅Wrを超える場合である。そこで、仮想バンパー領域71の仮想バンパー幅として適用する適用仮想バンパー幅として、2Z・Wvb=Wrとする(S27)。これにより、仮想バンパー領域71は、仮想バンパー幅が道路幅Wrとされる。
【0093】
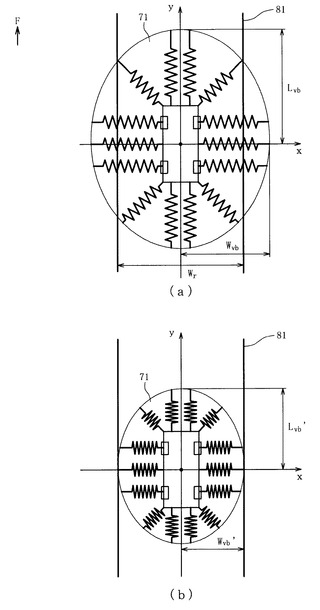
ここで、図9(a)を参照して、仮想バンパー領域71が道路幅Wrを超えている状態を説明する。図9(a)は、仮想バンパー領域71が道路幅Wrを超えている状態を示す図である。
【0094】
図9(a)のように、仮想バンパー領域71が道路幅Wrを超えている場合、その道路端81にあるもの、例えば、壁やガードレール、縁石などが障害物となって、仮想バンパー領域71内に存在することになるので、それらから大きな反発力が車両1の左右方向から加えられることになる。これにより、車両1の操舵が左右に振られてしまい、安定して車両1を走行させることができないという問題点がある。
【0095】
また、車両1のコーナーから斜め方向に配設されたバネ72からも、壁やガードレール、縁石などの存在によって、車両1に反発力が加えられるので、その反発力が大きい場合には、車両1が道路を前進可能であるにもかかわらず、停止してしまう、という問題点がある。
【0096】
仮想バンパー設定処理では、仮想バンパー領域71が道路幅Wrを超えている場合、S27の処理によって、仮想バンパー領域71の適用仮想バンパー幅を基準仮想バンパー幅である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。従って、車両1が狭い領域を走行する場合においても、物体80との衝突回避を行いつつ、車両1を安定して走行させることができる。
【0097】
図7に戻って説明を続ける。S26の処理の結果、道路幅Wrと、基準形状での仮想バンパー領域71の仮想バンパー幅(短径Wvbの2倍)との比Zが1以上である場合は(S26:No)、基準仮想バンパー幅(2Wvb)と道路幅Wrとが同じか、基準仮想バンパー幅(2Wvb)よりも道路幅Wrの方が大きく、基準形状の仮想バンパー領域71が道路幅Wr内にある場合である。そこで、仮想バンパー領域71の仮想バンパー幅として適用する適用仮想バンパー幅として、基準仮想バンパー幅(2Wvb)とする(S28)。これにより、仮想バンパー領域71は、仮想バンパー幅が基準形状と同じ幅とされる。
【0098】
次いで、S27又はS28の処理の後、センサ情報から算出した適用仮想バンパー幅、即ち、S27又はS28の処理よって設定した適用仮想バンパー幅が、S22の処理によって、地図情報DB92bから取得した適用仮想バンパー幅よりも小さいか否かを判断する(S29)。その結果、センサ情報から算出した適用仮想バンパー幅の方が小さければ(S29:No)、そのセンサ情報から算出した適用仮想バンパー幅を採用して(S30)、外郭形成処理を実行する(S32)。
【0099】
また、S29の処理の結果、センサ情報から算出した適用仮想バンパー幅が、地図情報DB92bから取得した適用仮想バンパー幅と同じか、地図情報DB92bから取得した適用仮想バンパー幅よりも大きい場合は(S29:No)、地図情報DB92bによる適用仮想バンパー幅を採用して(S31)、外郭形成処理を実行する(S32)。
【0100】
また、S23の処理の結果、センサ情報を使用しないと判断された場合も(S23:No)、地図情報DB92bによる適用仮想バンパー幅を採用して(S31)、外郭形成処理を実行する(S32)。
【0101】
ここで、センサ情報が使用でき、また、センサ情報から算出した適用仮想バンパー幅が信頼できるものである場合、仮想バンパー設定処理では、積極的にセンサ情報から算出した適用仮想バンパー幅を採用して、仮想バンパー領域71の外郭形成を行う。
【0102】
センサ情報を用いることで、道路状況が変化している場合に、その変化に対応して仮想バンパー幅を決定することができる。また、工事や駐停車中の車両によって、道路の一部が通行不能な場合に、車両1が走行可能な領域の幅を道路幅Wrとすることで、そのような一時的な道路の変化にも対応して、仮想バンパー幅を決定することができる。
【0103】
一方、センサ情報に基づいて算出した仮想バンパー幅が、地図情報DB92cより取得した仮想バンパー幅よりも大きい場合には、地図情報DB92cより取得した適用仮想バンパー幅を採用して、仮想バンパー領域71の外郭形成を行う。この場合、上述した通り、センサ情報から取得した道路幅Wrが誤っている可能性が高い。そこで、この場合には、地図情報DB92cより取得した適用仮想バンパー幅を採用することにより、道路等の実情により合った仮想バンパー領域71を設定できる。
【0104】
また、第1〜第4カメラ26a〜26dが設置されていなかったり、故障していたりして、センサ情報が取得できない場合にも、地図情報DB92cより取得した適用仮想バンパー幅を採用して、仮想バンパー領域71の外郭形成が行われるので、センサ情報が得られない場合においても、物体の衝突回避を行いつつ、車両を安定して走行させる機会を増やすことができる。
【0105】
ここで、図9(b)を参照して、S32の外郭形成処理について説明する。図9(b)は、外郭形成処理を説明する図である。
【0106】
S30又はS31の処理によって、適用仮想バンパー幅が決定されると、その適用仮想バンパー幅の半分の長さを、今回形成する仮想バンパー領域71の短径Wvb’とする。そして、基準形状の短径Wvbと、今回形成する仮想バンパー領域71の短径Wvb’との比をQ=Wvb’/Wvbとすると、今回形成する仮想バンパー領域71の長径Lvb’を以下の式(4)で算出する。
【0107】
Lvb’=Q・Lvb ・・・(4)
そして、以下の式(5)によって、仮想バンパー領域71を形成し、設定する。
【0108】
x2/Wvb’2+y2/Lvb’2=1 ・・・(5)
これにより、S30又はS31の処理によって採用された適用仮想バンパー幅を有する仮想バンパー領域71が設定される。
【0109】
ここで、仮想バンパー幅が、道路幅Wrに合わせて基準形状から縮小された場合、仮想バンパー領域71の長径、即ち、車両1の前後方向における仮想バンパー領域81の長さ(以下「仮想バンパー長さ」と称す)も、その縮小度合いに合わせて基準形状から縮小されることになる。車両1が道路幅Wrの狭いところを走行する場合、通常は、速度を落として走行する。よって、車両1が走行する道路幅Wrが狭いほど、仮想バンパー幅と共に、仮想バンパー長さを短くすることにより、車両1の進行方向において遠くに物体80が存在する場合に、必要以上に車両1に対して反発力Frが加えられることを抑制できる。よって、車両1をより遠くまで進行させることができるので、物体80との衝突回避を行いつつ、車両1をより安定して走行させることができる。
【0110】
図7に戻り説明を続ける。外郭形成処理(S32)の次に、バンパー形成処理を実行する(S33)。このバンパー形成処理では、図2に示すように、仮想バンパー領域71内に、バネ72を仮想的に並設する。具体的には、各バネ72の一端を、車両1の外周11において、10cm間隔で取着する。そして、車両1の前方側または後方側の仮想バンパー領域71に配設されるバネ72f,72bは、一端が車両1の前方先端(前端)または後方先端(後端)に取着された状態で、バネの長さ方向が車両1の前後方向と平行となるように配設し、他端を車両1前方側または後方側の外縁71aに位置させる。
【0111】
また、車両1の右側または左側の仮想バンパー領域71に配設されるバネ72r,72lは、一端が車両1の右側面または左側面に取着された状態で、バネの長さ方向が車両1の左右方向と平行となるように配設し、他端を車両1右側または左側の外縁71aに位置させる。
【0112】
また、車両1の右前コーナー,左前コーナー,左後コーナー,右後コーナー側の仮想バンパー領域71に配設されるバネ72fr,72fl,72bl,72brは、一端が車両1の対応するコーナー部分に取着された状態で、バネの長さ方向が、車両1の右前方向,左前方向,左後方向または右後方向となるように配設し、他端を車両1の左前コーナー,左後コーナー,右後コーナー側の外縁71aに位置させる。
【0113】
S28の処理では、このようにして配設した各バネ72のバネ情報をバネ設定テーブルメモリ93aに格納することで、バネ72の設定を完了する。そして、S28の処理の終了後、仮想バンパー設定処理を終了し、物体回避処理へ戻る。
【0114】
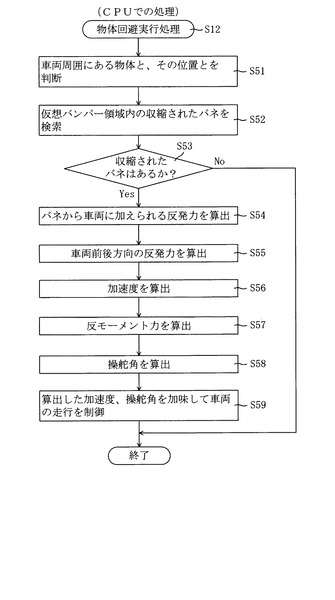
次いで、図10を参照して、図6の物体回避処理の一処理である、物体回避実行処理(S12)について説明する。図10は、この物体回避実行処理を示すフローチャートである。
【0115】
物体回避実行処理が実行されると、CPU91は、まず、第1〜第4カメラ26a〜26dにて撮像された画像の画像データから、車両1の周囲に存在する物体80と、車両1を基準としたその物体80の位置とを判断する(S51)。次に、S51の処理にて判断された物体80の位置と、バネ設定テーブルメモリ93aに格納された各バネ72のバネ情報とから、物体80の存在によって、仮想バンパー領域71内に仮想的に並設されたバネ72の中から収縮されたバネ73を検索する(S52)。
【0116】
そして、S52の処理の結果、収縮されたバネ73があるか否かを判断する(S53)。その結果、収縮されたバネ73がなければ(S53:No)、仮想バンパー領域71内に物体80がないと判断し、そのまま物体回避実行処理を終了する。
【0117】
一方、収縮されたバネ73があると判断された場合(S53:Yes)、仮想バンパー領域71内に物体80があると判断できるので、次に説明するS54〜S59の処理を実行して、物体80を回避するよう、車両1の走行を制御する。
【0118】
まず、S54の処理では、収縮したバネ73から車両1に対して加えられる反発力Frを算出する(S54)。反発力Frの大きさは上述の式(1)によって算出される。このとき、式(1)で用いるバネ定数は、収縮したバネ73のバネ定数をバネ設定テーブルメモリ93aより取得する。なお、収縮したバネ73が複数ある場合は、それぞれのバネ73から加えられる反発力の向きも考慮して、すべてのバネ73から車両1に加えられる反発力を算出する。
【0119】
次に、S54の処理にて算出した各バネ72(バネ73)から加えられた反発力Frの前後方向成分を合成して、車両1の重心Cに加えられる前後方向の反発力Fryを算出する。(S55)。そして、以下の式(6)により、車両1の加速度aを算出する(S56)。
【0120】
a=Fry/m ・・・(6)
ここで、mは、車両1の重量(質量)である。
【0121】
続くS58の処理では、前進時において、S54の処理にて算出した各バネ72(73)から加えられた反発力Frの左右方向成分から、車両1の重心Cに加えられる反モーメント力Mを算出する(S58)。
【0122】
そして、算出した反モーメント力Mから、以下の式により、車両1の操舵角δfを算出する。
【0123】
【数2】
なお、車両1が前進する場合、後進する場合のいずれにおいても、その車両速度が毎秒0.5m以下である場合、次の式(7)により、車両1の操舵角δfを算出する。
【0124】
δf=−M/(2・Kf・Lf) ・・・(7)
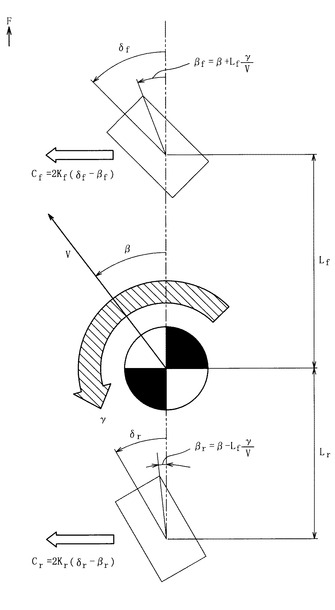
ここで、[数2],式(7)の各式で用いられる各種パラメータの意味について、図11を参照して説明する。図11は、反モーメント力によって取り得るべき車両1の操舵角δfを算出する場合に用いるパラメータを説明する図である。
【0125】
まず、Lfは、前輪軸と車両1の重心との距離であり、Lrは、後輪軸と車両1の重心との距離である。Kfは、前輪等価コーナーリングスティフネスであり、Krは、後輪等価コーナーリングスティフネスである。βは、重心位置における車両1の横滑り角であり、γは車両1のヨーレートである。Vは、車両速度である。なお、図10において、δrは、後輪における操舵角であるが、本実施形態における車両1は、前輪のみ操舵可能であるので、δrを0として取り扱っている。
【0126】
図10に戻り説明を続ける。S58の処理が終了すると、続いて、S59の処理を実行する。S59の処理では、S56の処理により算出した加速度aと、現在の車両1の速度と、運転者によって踏み込まれたアクセルペダルの踏み込み量とから、目標とすべき車両速度を決定し、その目標とすべき車両速度を示す制御信号を、後述する車輪駆動装置3(図1参照)へ送信する。また、S59の処理では、S58の処理により算出した操舵角δfを示す制御信号を、後述する操舵駆動装置5(図1参照)へ送信する。そして、S59の処理の終了後、物体回避実行処理を終了する。
【0127】
このS59の処理により、車両1が、前後方向の反発力Fryによって生じる車両1の加速度を反映させた速度で走行するように、車両1の走行の制御が行われる。また、車両1が、左右方向の反発力によって生じる反モーメント力Mを反映させた操舵角で走行するように、車両1の走行の制御が行われる。よって、容易に且つ速やかに、その物体80を回避しながら車両1を走行させることができる。
【0128】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の改良変形が可能であることは容易に推察できるものである。例えば、上記各実施形態で挙げた数値は一例であり、他の数値を採用することは当然可能である。
【0129】
上記実施形態では、仮想バンパー設定処理(図7)のS28の処理によって、基準仮想バンパー幅(2Wvb)よりも道路幅Wrの方が大きい場合には、仮想バンパー領域71の仮想バンパー幅として適用する適用仮想バンパー幅として、基準仮想バンパー幅(2Wvb)とする、即ち、仮想バンパー領域71の仮想バンパー幅を基準形状と同じ幅とする場合について説明したが、必ずしもこれに限られるものではない。基準仮想バンパー幅(2Wvb)よりも道路幅Wrの方が大きい場合には、仮想バンパー領域71の仮想バンパー幅を基準形状よりも大きい幅となるように、基準形状を拡大してもよい。これにより、車両1が基準仮想バンパー幅(2Wvb)よりも広い道路幅の道路等を走行している場合は、仮想バンパー領域71の仮想バンパー幅を道路幅Wrに合わせて拡大できる。よって、基準仮想バンパー幅よりも広い道路幅の道路等において、車両1が道路幅方向に進行しようとした場合、その道路等の道路端81にあるもの(壁、ガードレース、縁石など)が仮想バンパー領域71に存在することになり、それが障害物となって、車両1に反発力Frが加えられることになる。従って、車両1が道路幅の広い道路を走行する場合に、道路端に寄りすぎてしまうことを抑制できる。
【0130】
また、この場合、仮想バンパー領域71の仮想バンパー幅を、道路幅Wrとするか、又は、道路幅Wrよりも若干長い幅となるように設定してもよい。例えば、適用仮想バンパー幅として、1.1×Wrを設定してもよい。ただし、Wrに乗ずる係数は、適用仮想バンパー幅が道路幅Wrよりも大きくなりすぎない程度に任意の値であってよい。これにより、適用仮想バンパー幅が道路幅Wrと同じか、道路幅Wrよりも若干大きく設定されるので、道路端81が仮想バンパー領域71の外縁と重なるか、仮想バンパー領域71内に少しだけ入り込む。よって、車両1が、道路端81にある壁、ガードレール、縁石などから反発力を受けないか、反発力を受けたとしても小さな反発力を受けることになるので、車両1の操舵が左右に振られたり、車両1が進行できるにもかかわらず停止させられたりすることなく、車両1が道路端81に無用に近づいてしまうことを抑制できる。
【0131】
上記実施形態では、仮想バンパー設定処理(図7)のS32の外郭形成処理において、仮想バンパー幅が、道路幅Wrに合わせて基準形状から縮小された場合、仮想バンパー領域71の長径、即ち、車両1の前後方向における仮想バンパー領域81の仮想バンパー長さも、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小する場合について説明したが、必ずしもこれに限られるものではない。例えば、仮想バンパー長さの縮小度合いが、仮想バンパー幅の縮小度合いよりも小さくなるように、仮想バンパー長さを基準形状から縮小してもよい。また、仮想バンパー長さについては、図12(a)に示すように、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。また、車両1の速度が遅い場合は、仮想バンパー長さを、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小し、車両1の速度が速い場合は、仮想バンパー長さについては、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。また、車両1の速度が第1所定速度未満の場合は、仮想バンパー長さを、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小し、車両1の速度が第1所定速度以上第2所定速度未満の場合は、仮想バンパー長さの縮小度合いが、仮想バンパー幅の縮小度合いよりも小さくなるように、仮想バンパー長さを基準形状から縮小し、車両1の速度が第2所定値以上の場合は、仮想バンパー長さについては、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。これにより、道路幅Wrの狭い場所を車両1が速い速度で進行するような場合があっても、早めに、車両1の進行方向にある物体80との回避動作を行うことができる。よって、車両1を安定して走行させつつ、安全に物体80との衝突回避を行うことができる。
【0132】
また、上記実施形態では、仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー設定処理(図7)のS27の処理によって、仮想バンパー領域71の適用仮想バンパー幅を基準仮想バンパー幅(2Wvb)から縮小し、道路幅Wrとする場合について説明したが、必ずしも仮想バンパー幅を道路幅Wrとする必要はなく、基準仮想バンパー幅よりも縮小すればよい。例えば、図12(b)に示すように、適用仮想バンパー幅(2Wvb’)として、道路幅Wrよりも若干長い幅となるように設定してもよい。例えば、2Wvb’=1.1×Wrとして、適用仮想バンパー幅を設定してもよい。ただし、Wrに乗ずる係数は、適用仮想バンパー幅が道路幅Wrよりも大きくなりすぎない程度に任意の値であってよい。これにより、適用仮想バンパー幅が道路幅Wrよりも若干大きく設定されるので、道路端81が仮想バンパー領域71内に少しだけ入り込む。よって、車両1が、道路端81にある壁、ガードレール、縁石などから小さな反発力を受けることになるので、車両1の操舵が左右に振られたり、車両1が進行できるにもかかわらず停止させられたりすることなく、車両1が道路端81に無用に近づいてしまうことを抑制できる。
【0133】
なお、この場合、仮想バンパー領域71の仮想バンパー長さについては、上記実施形態と同様に、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小してもよいし、上述した変形例のように、仮想バンパー長さの縮小度合いが、仮想バンパー幅の縮小度合いよりも小さくなるように、仮想バンパー長さを基準形状から縮小してもよい。また、図12(a)に示す場合と同様に、仮想バンパー長さについては、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。
【0134】
また、上記実施形態において、仮想バンパー領域71の基準形状を図4に示すような楕円形状とする場合について説明したが、必ずしもこれに限られるものではない。例えば、図13(a)に示す通り、車両1中央の前後軸と車両1の前輪軸との交点、及び、その前後軸と車両1の後輪軸との交点を中心とする扇形形状をした領域を、車両1の前方方向と後方方向とに設けた形状を、仮想バンパー領域71の基準形状としてもよい。この場合、基準形状メモリ92bには、扇形の半径Rvbと、扇形の範囲(例えば、図13(a)に示す角度θvb1〜θvb4)を格納してもよい。
【0135】
図13(a)に示す形状を仮想バンパー領域71の基準形状とした場合、仮想バンパー設定処理のS27の処理では、図13(b)又は(c)に示す方法で、仮想バンパー領域71の仮想バンパー幅を縮小してもよい。つまり、図13(b)に示すように、車両1前方側の扇形の範囲を0〜180°とし,車両1後方側の扇形の範囲を180°〜360°として、扇形の半径Rvb’を道路幅の半分(Wr/2)として、仮想バンパー領域71の仮想バンパー幅を縮小してもよい。また、図13(c)に示すように、車両1前方側の扇形の範囲を、基準形状と同様に、θvb1〜θvb2とし、車両1後方側の扇形の範囲を、基準形状と同様に、θvb3〜θvb4として、扇形の半径Rvb’’を次の式(8)で算出することで、仮想バンパー領域71の仮想バンパー幅を縮小してもよい。
【0136】
Rvb’’=Wr/(2cos(θvb1)) ・・・(8)
このように、仮想バンパー領域71の基準形状が扇形の場合においても、図13(b),(c)のように、仮想バンパー領域71を縮小することにより、仮想バンパー領域71を、道路幅の内側に存在させることができる。これにより、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。従って、車両1が狭い領域を走行する場合においても、物体80との衝突回避を行いつつ、車両1を安定して走行させることができる。
【0137】
なお、図13(b)のように仮想バンパー領域71を縮小する場合において、扇形の半径Rvb’を、道路幅Wrの半分より若干大きくなるように、設定してもよい。例えば、Rvb’=1.1×(Wr/2)としてもよい。また、図13(c)のように仮想バンパー領域71を縮小する場合においても、扇形の半径Rvb’’を、次の式(9)を用いて設定してもよい。
【0138】
Rvb’’=1.1×Wr/(2cos(θvb1)) ・・・(9)
ただし、(Wr/2)又は(Wr/(2cos(θvb1)))に乗ずる係数は、適用仮想バンパー幅が道路幅Wrよりも大きくなりすぎない程度に任意の値であってよい。これにより、道路端81が仮想バンパー領域71内に少しだけ入り込む。よって、車両1が、道路端81にある壁、ガードレール、縁石などから小さな反発力を受けることになるので、車両1の操舵が左右に振られたり、車両1が進行できるにもかかわらず停止させられたりすることなく、車両1が道路端81に無用に近づいてしまうことを抑制できる。
【0139】
上記実施形態では、仮想バンパー領域71の基準仮想バンパー幅と、道路幅Wrとの比から、仮想バンパー領域71における仮想バンパー幅と仮想バンパー長さとの縮小度合いを決定したが、必ずしもこれに限られるものではなく、図14に示すように、基準形状の仮想バンパー領域71と道路とが重なる部分の面積Srを算出し、その面積Srと、基準形状の仮想バンパー領域71の面積Svbとの比(=Sr/Svb)、若しくは、これらの比の平方根((Sr/Svb)1/2)を、仮想バンパー領域71における仮想バンパー幅および仮想バンパー長さの縮小度合いZとして、決定してもよい。
【0140】
この場合、図4に示す基準形状に対して、次の式(10)を適用することにより、その基準形状から縮小された仮想バンパー領域71を形成し、設定してもよい。
【0141】
x2/(Z・Wvb)2+y2/(Z・Lvb)2=1 ・・・(10)
上記実施形態における仮想バンパー領域71では、反発力Frが作用する作用点を車両1の外周に分散させ、その分散させた作用点から仮想バンパー領域71の外縁71aに向けて仮想的にバネ72を並設する場合について説明したが、必ずしもこれに限られるものではなく、反発力Frが作用する作用点を車両1の任意の1点または複数個所の点に集中させて、仮想バンパー領域71に複数のバネ72を並設してもよい。例えば、車両1中央の前後軸と車両1の前輪軸との交点、及び、その前後軸と車両1の後輪軸との交点を、反発力Frが作用する作用点とし、これら2か所に、バネ72の一端を取着させて、バネ72を仮想バンパー領域71に並設させてもよい。
【0142】
上記実施形態において、仮想バンパー領域71内に存在する物体80によって車両1に反発力Frが加えられた場合に、前輪2FL,2FRの操舵角がその反発力Frに基づいて算出した操舵角δfとなるよう、走行制御装置100が操舵駆動装置5を制御する場合について説明したが、車両1にステアリングホイール13に回転力を加える駆動装置を設け、走行制御装置100は、その駆動装置を制御して、操舵角δfの方向に、操舵角δfの大きさに応じた回転力をステアリングホイール13に加えるようにしてもよい。運転者は、ステアリングホイール13に加えられた回転力によってステアリングホイール13を回転操作することにより、物体80との衝突回避を行うことができる。
【0143】
上記各実施形態では、第1〜第4カメラ26a〜26dを搭載して、車両1の周辺情報を取得する場合について説明したが、周辺情報を取得する手段として、ステレオカメラ、赤外線カメラを用いてもよいし、ミリ波レーダ、レーザレーダ、UWB(Ultra Wide Band)レーダ等の各種レーダや、ソナーを用いてもよい。また、道路と車両との間の通信である路車間通信や、他車との間の通信による車車間通信によって、物体の位置情報を取得してもよい。またこれらを複数組み合わせて使用してもよい。
【0144】
例えば、レーザレーダは、レーザビームを車両1の周囲へ照査し、その反射の有無や反射を検出した方向およびレーザビームを照射してから反射を検出するまでの時間に基づいて、車両1の周辺にある道路や物体の形状等を把握するものである。走行制御装置100は、このレーザレーダを用いることにより、レーザレーダにより照射したレーザビームの反射の検出結果から、車両1の周辺に存在する物体等の形状をマップ化し、それに基づいて、物体の位置等を検出するように構成してもよい。
【0145】
上記各実施形態では、操舵装置5がラック&ピニオン式のステアリングギヤとして構成される場合について説明したが、必ずしもこれに限られるものではなく、ボールナット式等の他のステアリングギヤ機構を採用することは当然可能である。
【符号の説明】
【0146】
1 車両
26a〜26d 第1〜第4カメラ(検出手段)
100 走行制御装置
S24 (取得手段)
S25〜S32 (設定手段)
S54 (算出手段)
S59 (制御手段)
【技術分野】
【0001】
本発明は、走行制御装置および車両に関し、特に、車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両に関するものである。
【背景技術】
【0002】
従来より、電動車椅子などの移動体の周辺に設定した所定領域に何らかの物体(障害物)が存在する場合に、その物体を回避するための反発力が仮想的に移動体に加えられたものとして、移動体の走行を制御することで、その物体との衝突を回避する技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−110711号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載される技術では、物体の衝突回避が行われる前記所定領域として、移動体(電動車椅子1)の外縁から一定距離(規準距離zo)離れた地点までの領域を設定している。
【0005】
しかしながら、この所定領域は、移動体が移動可能な移動可能領域の大きさを考慮しておらず、常に一定の大きさを持つ。そのため、移動可能領域が狭いところでは、移動可能領域よりも所定領域が大きくなり、所定領域内に存在する移動可能領域の端にあるもの(壁、ガードレール、縁石など)が障害物となって、移動体に大きな反発力が加えられる。これにより、車両に対して前方向から大きな反発力が加えられた場合には、移動体が前進可能であるにもかかわらず停止してしまったり、移動体に対して左右両方向から大きな反発力が加えられた場合には、移動体の操舵が左右に振られてしまい、安定して移動体を走行させることができない、という問題点があった。
【0006】
本発明は、上述した問題点を解決するためになされたものであり、車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供することを目的としている。
【課題を解決するための手段および発明の効果】
【0007】
この目的を達成するために請求項1記載の走行制御装置によれば、検出手段により検出された物体が、設定手段により設定された所定領域内に存在していると、その物体との衝突を回避するための仮想的な反発力が、その物体と車両との位置関係に基づいて算出手段により算出される。そして、その算出された反発力が車両に加えられたものとして、制御手段によって、車両の走行に伴う制御が行われる。これにより、物体が所定領域内に存在すると、その物体との衝突を回避するように反発力が仮想的に車両に加えられ、その反発力に基づいて車両の走行に伴う制御が行われるので、容易に且つ速やかにその物体を回避して車両を走行させることができる。
【0008】
また、取得手段により、車両が走行可能な領域に関する情報が取得され、その取得された情報により、前記所定領域が設定手段によって設定される。これにより、車両が走行可能な領域に合わせて所定領域が設定されるので、車両が走行可能な領域よりも所定領域が大きくなりすぎることを抑制できる。よって、車両が走行可能な領域の端にあるものにより、車両に大きな反発力が加えられることを抑制できるので、車両が前進可能であるにもかかわらず停止してしまったり、車両の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両を走行させることができる。従って、車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができるという効果がある。
【0009】
請求項2記載の走行制御装置によれば、請求項1記載の走行制御装置の奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域が狭いほど、所定領域の範囲が狭くなるように、その所定領域が設定手段によって設定される。これにより、たとえ車両の走行可能な領域が狭くても、所定領域が、その車両の走行可能な領域よりも大きくなりすぎることを抑制できる。よって、車両の走行可能な領域が狭くても、確実に、車両を安定して走行させることができるという効果がある。
【0010】
請求項3記載の走行制御装置によれば、請求項2記載の走行制御装置の奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域の車両の側面方向における幅が狭いほど、少なくとも所定領域における側面方向の幅が狭くなるように、所定領域が設定手段によって設定されるので、車両が走行可能な領域の車両の側面方向にある端を、所定領域の範囲の外縁の外側、その外縁上、若しくは、その外縁の少し内側に位置させることができる。これにより、車両が走行可能な領域の車両の側面方向にある端から、車両には反発力が加えられないか、反発力が車両に加えられたとしても、その大きさを小さく抑えることができる。よって、車両の操舵が左右に振られてしまうといった問題が生じることを抑制できるので、安定して車両を走行させることができるという効果がある。
【0011】
請求項4記載の走行制御装置によれば、請求項3記載の走行制御装置が奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域の車両の側面方向における幅が狭いほど、所定領域における側面方向の幅を狭くすると共に、所定領域における車両の前後方向における長さが狭くなるように、所定領域が設定手段によって設定される。車両が走行可能な領域の車両の側面方向における幅が狭いところを車両が走行する場合、通常は、速度を落として走行する。よって、車両が走行可能な領域の車両の側面方向における幅が狭いほど、所定領域における側面方向の幅と共に、所定領域における車両の前後方向における長さを狭くすることにより、車両の進行方向において遠くに物体が存在する場合に、必要以上に車両に対して反発力が加えられることを抑制できる。よって、車両をより遠くまで進行させることができるので、物体との衝突回避を行いつつ、車両をより安定して走行させることができるという効果がある。
【0012】
請求項5記載の走行制御装置によれば、請求項3記載の走行制御装置が奏する効果に加え、次の効果を奏する。即ち、車両が走行可能な領域の車両の側面方向における幅が狭いほど、所定領域における側面方向の幅を狭くする一方、所定領域における車両の前後方向における長さが所定の長さに維持されるように、所定領域が設定手段によって設定される。これにより、車両が走行可能な領域の車両の側面方向における幅が狭い場所を車両が速い速度で進行するような場合があっても、早めに、車両の進行方向にある物体との回避動作を行うことができる。よって、車両を安定して走行させつつ、安全に物体と「の衝突回避を行うことができるという効果がある。
【0013】
請求項6記載の車両によれば、請求項1から5のいずれかに記載の走行制御装置が設けられているので、その車両において、対応する請求項に記載の走行制御装置と同様の効果を奏する。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態における車両を模式的に示した模式図である。
【図2】走行制御装置における物体の衝突回避方法を説明する説明図である。
【図3】走行制御装置を含む車両の電気的構成を示したブロック図である。
【図4】仮想バンパー領域の基準形状を模式的に示す模式図である。
【図5】バネ設定テーブルメモリの内容を模式的に示した模式図である。
【図6】物体回避処理を示すフローチャートである。
【図7】仮想バンパー設定処理を示すフローチャートである。
【図8】道路幅の取得方法を説明する説明図である。
【図9】(a)は、仮想バンパー領域が道路幅を超えている状態を示す図であり、(b)は、外郭形成処理を説明する図である。
【図10】物体回避実行処理を示すフローチャートである。
【図11】車両左右方向の反発力が加えられた場合において生じる反モーメント力によって取り得るべき車両の操舵角を算出する場合に用いるパラメータを説明する図である。
【図12】(a),(b)は、本発明を適用した仮想バンパー領域の変形例を示す図である。
【図13】(a),(b),(c)は、本発明を適用した仮想バンパー領域の変形例を示す図である。
【図14】本発明を適用した仮想バンパー領域の変形例を示す図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態について添付図面を参照して説明する。図1は、本発明の一実施形態である走行制御装置100を有する車両1を模式的に示した模式図である。
【0016】
まず、図1を参照して、車両1の構成について説明する。車両1は、その車両1が狭い領域を走行する場合においても、物体80の衝突回避を行いつつ、車両1を安定して走行させることができるように構成されている。
【0017】
なお、図1において、矢印Fによって示される方向が車両1の前方向を示している。この矢印Fは、その他の図面においても同様に、矢印Fによって示される方向を車両1の前方向として示している。また、以下の説明において、車両1が矢印F方向に進行する場合を「前進」、車両1が矢印F方向とは逆方向に進行する場合を「後退」と称す。
【0018】
走行制御装置100は、車両1の走行を制御するコンピュータ装置である。この走行制御装置100によって、物体80の衝突回避を行いつつ、車両1を安定して走行させている。
【0019】
ここで、図2を参照して、走行制御装置100における物体の衝突回避の方法について、その概略を説明する。図2は、走行制御装置100における物体の衝突回避方法を説明する説明図である。
【0020】
走行制御装置100は、車両1周囲に、衝突を避けるべき物体を検出する領域として、仮想バンパー領域71を設定(形成)する。走行制御装置100は、その仮想バンパー領域71に、複数のバネ72を仮想的に並設することで、仮想バンパーを構成することを想定する。
【0021】
このとき、各バネ72は、いずれも、一端を車両1の外周11に取着した状態で、他端が仮想バンパー領域71の外縁71aに位置するように、仮想バンパー領域71に並設されることを走行制御装置100にて想定する。また、各バネ72の一端は、車両1の外周11において、10cm間隔で取着されることを走行制御装置100にて想定する。
【0022】
更に、車両1の前方側または後方側の仮想バンパー領域71に配設されるバネ72f,72bは、一端が車両1の前方先端(前端)または後方先端(後端)に取着された状態で、バネの長さ方向が車両1の前後方向と平行となるように配設され、他端は車両1前方側または後方側の外縁71aに位置されることを走行制御装置100にて想定する。
【0023】
車両1の右側または左側の仮想バンパー領域71に配設されるバネ72r,72lは、一端が車両1の右側面または左側面に取着された状態で、バネの長さ方向が車両1の左右方向と平行となるように配設され、他端は車両1右側または左側の外縁71aに位置されることを想定する。
【0024】
また、車両1の右前コーナー,左前コーナー,左後コーナー,右後コーナー側の仮想バンパー領域71に配設されるバネ72fr,72fl,72bl,72brは、一端が車両1の対応するコーナー部分に取着された状態で、バネの長さ方向が、車両1の右前方向,左前方向,左後方向または右後方向となるように配設され、他端が車両1の左前コーナー,左後コーナー,右後コーナー側の外縁71aに位置されることを想定する。
【0025】
走行制御装置100は、車両1に設けられた後述の第1〜第4カメラ26a〜26d(図1参照)によって取得された画像から、車両1の周辺にある物体の位置を判断し、以下に従って、その物体80との衝突を回避するための反発力Frを算出する。
【0026】
即ち、走行制御装置100は、仮想バンパー領域71内に仮想的に並設されたバネ72のうち、物体80の存在によって収縮されたバネ73を検索する。そして、収縮されたバネ73がある場合、仮想バンパー領域71内に物体80が存在するとして、そのバネ73の収縮量dを物体80と車両1との位置関係から判断し、その収縮量dに基づいて、バネ73に生じる弾性力Feを以下の式(1)により算出する。なお、以下の式(1)において、knはバネ73のバネ定数である。
【0027】
Fe=kn×d ・・・(1)
走行制御装置100は、弾性力Feの反作用として、その弾性力Feが発生したバネ73の一端が取着されている車両1上の点に、反発力Frが、バネ73の長さ方向に車両1の内側に向けて加えられるものとする。
【0028】
例えば、図2に示すように、物体80によって収縮されたバネ73が、車両1の前方に配設されたバネ72fの一つであった場合、そのバネ72fが取着された車両1上の点に、車両1に対して後向きの反発力Fr1が車両1に加えられる。同様に、バネ73が車両1の左側または右前方向に配設されたバネ72l,72frの一つであった場合、そのバネ72l又はバネ72frが取着された車両1上の点に、車両1に対して右向き又は左後向きの反発力Fr2又はFr3が車両1に加えられる。つまり、各バネ72が取着される車両1の外周11上の点が、反発力Frが加えられる作用点となる。
【0029】
走行制御装置100は、各バネ72(73)から加えられた反発力Frの前後方向成分(車両1の前後方向と同じ方向の成分)を合成して、車両1の重心Cに加えられる車両1の前後方向の反発力Fryを算出する。また、各バネ72(73)から加えられた反発力Frの左右方向成分(車両1の前後方向に対する左右方向と同じ方向の成分)から、車両1の重心Cに加えられる反モーメント力Mを算出する。
【0030】
そして、走行制御装置100は、車両1の重心Cに加えられた前後方向の反発力Fryに基づいて、その反発力Fryによって生じる車両1の加速度を算出する。走行制御装置100には、車両1に設けられたアクセルペダル(図示せず)の踏み込み量に関する情報も入力される。走行制御装置100は、現在の車両1の速度と、運転者によって踏み込まれたアクセルペダルの踏み込み量と、前後方向の反発力Fryによって生じる車両1の加速度とから、目標とすべき車両速度を決定し、その目標とすべき車両速度を示す制御信号を、後述する車輪駆動装置3(図1参照)へ送信する。これにより、車両1が、前後方向の反発力Fryによって生じる車両1の加速度を反映させた速度で走行するように、車両1の走行の制御が行われる。
【0031】
また、走行制御装置100は、その算出した反モーメント力Mに応じて車両1の操舵角を算出して、その操舵角を示す制御信号を、後述する操舵駆動装置5(図1参照)へ送信する。これにより、車両1が、反発力Frによって生じる反モーメント力を反映させた操舵角で走行するように、車両1の走行の制御が行われる。
【0032】
このように、走行制御装置100は、仮想バンパー領域71内に存在する物体との衝突を回避するために、仮想的に並設したバネ72の一部(バネ73)が物体80によって収縮されたものとし、そのバネ73の弾性力Feを算出して、その反作用として反発力Frが車両1に加えたものとすることで、その反発力Frに基づいて、車両1の速度や操舵角を制御する。これにより、容易に且つ速やかに、その物体80を回避しながら車両1を走行させることができる。
【0033】
また、物体80が車両1に近いほど、仮想バンパー領域71内に想定上並設されているバネ72の一部(バネ73)がその物体80によって大きく縮められる。バネの弾性力Feはバネの収縮量(縮み量)が大きいほど大きいので、物体80が車両1に近いほど、大きな反発力Frを車両1に加えることができる。よって、物体80が車両1に近いほど大きくなる反発力Frにより、確実に物体80との衝突を回避できる。
【0034】
なお、走行制御装置100には、車両1に設けられ、運転者によって回転操作される後述のステアリングホイール13(図1参照)から、ステアリングホイール13の回転角速度を示す情報も入力されている。反力Frが車両1に仮想的に加えられていない場合、即ち、仮想バンパー領域71内に物体が存在しない場合には、走行制御装置100は、ステアリングホイール13の回転角速度を積分して得られるステアリングホイール13の操舵角に応じて車両1の操舵角を決定し、その操舵角を示す制御信号を操舵駆動装置5へ送信する。
【0035】
図1に戻って、車両1の構成について説明を続ける。車両1は、走行制御装置100の他に、複数(本実施形態では4輪)の車輪2FL,2FR,2RL,2RRと、それら複数の車輪2FL〜2RRの内の一部(本実施形態では、左右の前輪2FL,2FR)を回転駆動する車輪駆動装置3と、複数の車輪2FL〜2RRの内の一部(本実施形態では、左右の前輪2FL,2FR)を操舵するステアリング装置6及び操舵駆動装置5と、運転者から車両1の操舵方向の指示を受け付けるステアリングホイール13と、車両1の周囲を第1〜第4カメラ26a〜26dと、車両1の現在位置を検出する現在位置検出装置27とを主に有している。
【0036】
車輪2FL,2FRは、車両1の前方側に配置される左右の前輪であり、車輪駆動装置3によって回転駆動される駆動輪として構成されている。一方、車輪2RL,2RRは、車両1の後方側に配置される左右の後輪であり、車両1の走行に伴って従動する従動輪として構成されている。
【0037】
車輪駆動装置3は、左右の前輪2FL,2FRに回転駆動力を付与するものであり、デファレンシャルギヤ(図示せず)及び一対のドライブシャフト31を介して左右の前輪2FL,2FRに接続されている。車輪駆動装置3は、走行制御装置100から通知された、目標とすべき車両速度を示す制御信号に基づき、ドライブシャフト31を介して左右の前輪2FL,2FRに回転駆動力を付与する。これにより、車両1は、走行制御装置100から通知された車両速度に応じた速度で走行する。
【0038】
なお、車輪駆動装置3は、走行制御装置100から、その走行制御装置100によって算出された反発力Frの車両1の前後方向の反発力Frfによって生じる車両1の加速度を示す制御信号を受け取り、その車両1の加速度と、運転者によって踏み込まれたアクセルペダルの踏み込み量と、現在の車両1の速度とから目標とすべき車両速度を算出して、その目標とすべき車両速度となるように、ドライブシャフト31を介して左右の前輪2FL,2FRに回転駆動力を付与してもよい。
【0039】
操舵駆動装置5は、左右の前輪2FL,2FRを操舵するための装置であり、ステアリング装置6に回転駆動力を付与する電動モータ5a(図3参照)を備えて構成されている。ステアリング装置6は、ステアリングシャフト61と、フックジョイント62と、ステアリングギヤ63と、タイロッド64と、ナックルアーム65とを主に備えて構成されている。なお、ステアリング装置6は、ステアリングギヤ63がピニオン(図示せず)とラック(図示せず)とを備えたラックアンドピニオン機構によって構成されている。
【0040】
操舵駆動装置5は、走行制御装置100から車両1の操舵角を示す制御信号を受信すると、その操舵角に応じて電動モータ5aを駆動し、電動モータ5aの回転駆動力がステアリング装置6のステアリングシャフト61に付与される。その回転駆動力は、ステアリングシャフト61を介してフックジョイント62に伝達されると共にフックジョイント62によって角度を変えられ、ステアリングギヤ63のピニオンに回転運動として伝達される。そして、ピニオンに伝達された回転運動はラックの直線運動に変換され、ラックが直線運動することで、ラックの両端に接続されたタイロッド64が移動し、ナックルアーム65を介して前輪2FL,2FRが操舵される。これにより、車両1は、走行制御装置100から指示された操舵角で、前輪2FL,2FRが操舵される。
【0041】
ステアリングホイール13は、車両1の搭乗者から回転操作されることで、車両1の操舵方向の指示を受け付けるものである。ステアリングホイール13は、搭乗者によって回転操作されると、その回転角速度を走行制御装置100へ送信する。なお、ステアリングホイール13は、搭乗者によって回転操作された回転角を走行制御装置100へ送信してもよい。そして、走行制御装置100が、ステアリングホイール13から取得した回転角を微分して、回転角速度を算出してもよい。
【0042】
第1〜第4カメラ26a〜26dは、車両1の周囲を撮像するための撮像装置であり、CCDイメージセンサや、CMOSイメージセンサなどの撮像素子が搭載されたデジタルカメラで構成されている。各第1〜第4カメラ26a〜26dは、撮像した画像を画像データに変換して走行制御装置100へ出力する。
【0043】
第1カメラ26aは、車両1の前方中央に配設され、第2カメラ26bは、車両1の後方中央に配設され、第3カメラ26cは、車両1の右側面のサイドミラー(図示せず)に配設され、第4カメラ26dは、車両1の左側面のサイドミラー(図示せず)に配設されている。本実施形態では、4つの第1〜第4カメラ26a〜26dにより、車両1を中心として車両1の前後方向に少なくとも30mと、車両1を中心として車両1の左右方向に少なくとも15mの範囲を撮像可能に構成されている。なお、第1〜第4カメラ26a〜26dによって撮像可能な範囲は、適宜設定されるものであってよい。
【0044】
各第1〜第4カメラ26a〜26dは、撮像した画像を画像データに変換して走行制御装置100へ出力する。走行制御装置100へ出力された画像データは、その走行制御装置100によって解析され、車両1の周囲に存在する物体と、車両1を基準としたその物体の位置とが検出される。そして、検出された物体の位置から、仮想バンパー領域71内に物体が存在するか否かが判断される。また、仮想バンパー領域71内に物体が存在する場合には、走行制御装置100において、その物体の位置から収縮されるバネ73(図2参照)が検索され、そのバネ73にかかる弾性力が算出されて、車両1に加えられる反発力が求められる。
【0045】
現在位置検出装置27は、車両1の現在位置(緯度、経度からなる絶対座標値)を検出するためのものである。この現在位置検出装置27は、人工衛星を利用して車両の位置を測定するGPS(Global Positioning System)受信装置、地磁気を検出して車両の方位を求める地磁気センサ、ジャイロセンサ、車速センサの1又は複数が使用される。更には、後述する地図情報DB92c(図3参照)と走行軌道とのマップマッチング或いは地図情報DB92cと第1〜第4カメラ26a〜26dでとらえた構造物や標識等とのマッチングにより現在位置を同定してもよい。
【0046】
次いで、図3を参照して、走行制御装置100の詳細構成について説明する。図3は、走行制御装置100を含む車両1の電気的構成を示したブロック図である。
【0047】
走行制御装置100は、CPU91、フラッシュメモリ92及びRAM93を有しており、それらがバスライン94を介して入出力ポート95に接続されている。入出力ポート95には、上述した、車輪駆動装置3,操舵駆動装置5、ステアリングホイール13、第1〜第4カメラ26a〜26d、現在位置検出装置27、及び、その他の入出力装置99などが接続されている。
【0048】
CPU91は、入出力ポート95に接続されたステアリングホイール13、第1〜第4カメラ26a〜26d、現在位置検出装置27等から送信された各種の情報に基づいて、車輪駆動装置3や操舵駆動装置5等を制御する演算装置である。
【0049】
フラッシュメモリ92は、CPU91によって実行される制御プログラムや固定値データ等を記憶するための書き換え可能な不揮発性のメモリである。このフラッシュメモリ92には、プログラムメモリ92a、基準形状メモリ92b、及び、地図情報DB92cが設けられている。
【0050】
プログラムメモリ92aは、CPU91にて実行される各種のプログラムが格納されたフラッシュメモリ92上の領域である。後述する図6のフローチャートに示す物体回避処理、図7のフローチャートに示す仮想バンパー設定処理、図10のフローチャートに示す物体回避実行処理をCPU91にて実行されるための各プログラムは、このプログラムメモリ92aに格納されている。CPU91は、このプログラムメモリ92aに格納された各プログラムに従って各種処理を実行することで、車両1が狭い領域を走行する場合においても、物体80の衝突回避を行いつつ、車両1が安定して走行するように、車両1の走行を制御する。
【0051】
基準形状メモリ92bは、仮想バンパー領域71の基準形状を規定するパラメータを格納するメモリである。ここで、図4を参照して、仮想バンパー領域71の基準形状について説明する。図4は、仮想バンパー領域71の基準形状を模式的に示す模式図である。
【0052】
仮想バンパー領域71の基準形状は、図4に示す通り、車両1の重心Cを中心とし、車両1の前後方向を長軸、車両1の左右方向(側面方向)を短軸として、短径をWvb、長径をLvbとする楕円である。基準形状メモリ92bには、この短径Wvb及び長径Lvbの大きさが格納されている。
【0053】
詳細については図7を参照して後述するが、走行制御装置100(CPU91)では、所定時間間隔毎(本実施形態では、50ミリ秒毎)に、第1〜第4カメラ26a〜26dによって取得した画像データに基づいて、車両1が走行する道路(或いは場所)の幅(車両1の左右方向における該道路等の幅であり、以下、単に「道路幅」と称す)Wrを検出する。そして、その道路幅Wrが基準形状の短径Wvbの2倍の長さよりも短い場合、即ち、仮想バンパー領域71が道路幅を超える場合は、仮想バンパー領域71の幅(以下「仮想バンパー幅」と称す)となる短径が道路幅Wrの半分となるように、仮想バンパー領域71を形成する。
【0054】
なお、車両1が複数車線の道路を走行している場合、車両1が走行している車線の幅を道路幅Wrとしてもよい。また、車両1が道路中央よりも左側または右側を通用するような場合は、その道路のうち車両1が走行可能な幅を道路幅Wrとしてもよい。また、工事や駐停車中の車両によって、道路の一部が通行不能な場合は、車両1が走行可能な領域の幅を、道路幅Wrとしてもよい。
【0055】
また、基準形状メモリ92bに格納された短径Wvb、長径Lvbの値は、車両1に設けられた操作パネル(図示せず)を運転者(搭乗者)が操作することにより、その運転者(搭乗者)によって設定変更可能に構成されてもよい。
【0056】
また、本実施形態では、基準形状の楕円の中心を車両1の重心Cとする場合について説明するが、必ずしも車両1の重心Cとする必要はなく、任意の場所に設定されてよい。例えば、車両1中央の前後軸と、後輪軸(後輪2RL,2RRを結んだ直線)との交点に、その楕円の中心としてもよい。また、その楕円の中心位置(座標)も基準形状メモリ92bに格納するようにし、運転者(搭乗者)が操作パネル(図示せず)を操作することにより、その運転者(搭乗者)によって楕円の中心位置(座標)を設定変更可能に構成してもよい。
【0057】
図3に戻り説明を続ける。地図情報DB92cは、地図および道路に関する情報が格納されたデータベースである。この地図情報DB92cでは、各種施設の場所や、各種道路の位置などが、緯度、経度からなる絶対座標値によって示されている。また、地図情報DB92cでは、各道路に対して設定すべき仮想バンパー領域71の仮想バンパー幅(短径の2倍の大きさ)を規定している。
【0058】
走行制御装置100は、現在位置検出装置27によって検出された車両1の現在位置から、現在走行している道路等を特定し、その現在走行中の道路に対して設定すべき仮想バンパー領域71の仮想バンパー幅(短径の2倍の大きさ)を地図情報DB92cより取得する。
【0059】
そして、第1〜第4カメラ26a〜26dが設置されていなかったり、故障していたりして、第1〜第4カメラ26a〜26dによって道路幅Wrを取得できない場合、地図情報DB92cより取得した仮想バンパー幅となるように、仮想バンパー領域71を設定する。
【0060】
また、第1〜第4カメラ26a〜26dによって取得した道路幅Wrに基づいて算出した仮想バンパー幅が、地図情報DB92cより取得した仮想バンパー幅よりも大きい場合にも、地図情報DB92cより取得した仮想バンパー幅となるように、仮想バンパー領域71を設定する。一般的に、道路の状況に応じて予め各種地図情報DB92cにおいて規定されている仮想バンパー幅よりも、第1〜第4カメラ26a〜26dによって取得した道路幅Wrに基づいて算出した仮想バンパー幅が大きくなることはなく、第1〜第4カメラ26a〜26dによって取得した道路幅Wrが誤っている可能性が高い。そこで、この場合には、地図情報DB92cより取得した仮想バンパー幅となるように、仮想バンパー領域71を設定することで、道路等の実情により合った仮想バンパー領域71を設定できる。
【0061】
なお、車両1にナビゲーション装置が別途設けられている場合、走行制御装置100は、フラッシュメモリ92に地図情報DB92cを格納することに代えて、そのナビゲーション装置が有する地図情報DBを用いて上記の処理を行うようにしてもよい。この場合、ナビゲーション装置が走行制御装置100の入出力ポート95に接続され、走行制御装置100が入出力ポート95を介してナビゲーション装置より地図情報DBに格納された各種情報を取得するように構成すればよい。
【0062】
RAM93は、書き換え可能な揮発性のメモリであり、CPU91によって実行される制御プログラムの実行時に各種のデータを一時的に記憶するためのメモリである。RAM93には、バネ設定テーブルメモリ93aが設けられている。
【0063】
バネ設定テーブルメモリ93aは、仮想バンパー領域71に仮想的に並設した複数のバネ72に関する情報を記憶するメモリである。ここで、図5を参照して、バネ設定テーブルメモリ93aの詳細について説明する。図5は、バネ設定テーブルメモリ93aの内容を模式的に示した模式図である。
【0064】
走行制御装置100(CPU91)は、仮想バンパー領域71を設定(形成)すると、その仮想バンパー領域71内に複数のバネ72を仮想的に並設する。その並設されたバネ72の情報として、図5に示す通り、バネ72毎に、バネ72の識別情報であるバネ番号nに対応付けて、そのバネ番号nで示されるバネの作用点X座標Xpnと、作用点Y座標Ypnと、外郭X座標Xcnと、外郭Y座標Ycnと、取付角度αnと、バネ長Lvbnと、バネ定数knとを格納する。
【0065】
バネ番号nは、並設されたバネ1本1本を識別するための情報である。本実施形態では、車両1の前端に取着されたバネ72fの一番右側になるバネのバネ番号nを1とし、バネ番号1のバネから順に、反時計回りに各バネ72に対してバネ番号nを1ずつ大きくしながら、バネ番号nを割り振る。
【0066】
作用点X座標Xpn,作用点Y座標Ypnは、バネ番号nのバネにおける一端が、車両1に取着される点、つまり、そのバネの反発力Frが作用する作用点の座標を示すものである。本実施形態では、車両1中央の前後軸をY軸(車両1の前方向、即ち、矢印Fで示す方向を正方向)とし、車両1の重心を通る左右軸(後輪軸と平行な軸)をX軸(車両1の右方向を正方向)として、X軸とY軸との交点を原点とした座標系で、作用点X座標Xpn,作用点Y座標Ypnを表す。
【0067】
外郭X座標Xcn,外郭Y座標Ycnは、バネ番号nのバネ72における他端、つまり、仮想バンパー領域71の外郭に位置する他端の座標を示すものである。本実施形態では、上記の作用点X座標Xpn,作用点Y座標Ypnと同じ座標系で、外郭X座標Xcn,外郭Y座標Ycnを表す。
【0068】
取付角度αnは、バネ番号nのバネ72の車両1に対する取付角度を示すものである。ここでは、車両1中央の前後軸から車両1の右方向に伸びる半直線と、各バネ72の一端と他端とを結んだ直線とのなす角度を取付角度αnとして規定する。
【0069】
つまり、車両1の前端から前方側に配設されたバネ72fは、取付角度αnが90°となる。また、車両1の左側面から左側に配設されたバネ72l,車両1の後端から後方側に配設されたバネ72b,車両1の右側面から右側に配設されたバネ72rは、それぞれ、取付角度αnが180°,270°,0°となる。
【0070】
また、車両1の右前コーナーから右前方向に配設されるバネ72fr,車両1の左前コーナーから左前方向に配設されるバネ72fl,車両1の左後コーナーから左後方向に配設されるバネ72bl,車両1の右後コーナーから右後方向に配設されるバネ72brの取付角度αnは、それぞれ、0〜90°,90°〜180°,180°〜270°,270°〜360°の範囲内で次の式(2)で定まる角度となる。
【0071】
αn=tan−1((Ypn−Ycn)/(Xpn−Xcn)) ・・・(2)
バネ長Lvbnは、バネ番号nのバネ72の自然長(バネ72を伸縮させない状態におけるバネ72の長さ)を示すものである。各バネ72のバネ長Lvbnは、バネ72の一端が接続される作用点(作用点X座標Xpn,作用点Y座標Ypnで示される点)と、バネ72の他端が位置する外郭X座標Xcn,外郭Y座標Ycnで示される点との距離によって算出される。
【0072】
バネ定数knは、バネ番号nのバネ72のバネ定数を示すものである。なお、本実施形態では、すべてのバネ72において、以下のようにバネ定数knを設定する。即ち、すべてのバネ72において限界長さLlimまで収縮可能であり、限界長さLlimを超えて収縮されることはないものとした場合、各バネ72が、限界長さLlimまで収縮された場合に、それぞれのバネによって発生する弾性力Feがすべて同じ大きさとなるように、バネ定数knを設定する。これは、仮想バンパー領域71が縮小される場合についても同じである。
【0073】
具体的には、長さLvbbase、バネ定数kbaseである基準バネを想定したうえで、バネ長がLvbnであるバネ番号nのバネ定数knを以下の式(3)により算出してもよい。
【0074】
kn=kbase×(Lvbbase−Llim)/(Lvbn−Llim) ・・・(3)
これにより、いずれのバネも、限界長さLlimまで縮小された場合に発生する弾性力Fe=kbase×(Lvbbase−Llim)となり、同じ大きさの弾性力が発生する。
【0075】
よって、仮想バンパー領域71が縮小された場合であっても、車両1の近くに物体80が存在する場合には、基準形状の仮想バンパー領域71と同じ反発力を車両1に加えることができる。よって、安全に物体80の衝突回避を行うことができる。
【0076】
なお、基準バネのバネ長Lvbbaseやバネ定数kbaseの大きさは、操作パネル(図示せず)を運転者(搭乗者)が操作することにより、その運転者(搭乗者)によって設定変更可能に構成されてもよい。
【0077】
次いで、図6〜図11までのフローチャートと模式図とを参照して、車両1に搭載された走行制御装置100のCPU91により実行される物体回避処理について説明する。まず、図6は、この物体回避処理を示すフローチャートである。
【0078】
物体回避処理は、所定時間間隔(本実施形態では50ミリ秒)でCPU91により実行される処理で、車両1の進路方向に基づいて仮想バンパー領域71を設定(形成)し、その設定した仮想バンパー領域71内に物体80が存在する場合には、その物体80との衝突回避動を行う処理である。
【0079】
この物体回避処理が実行されると、CPU91は、まず、仮想バンパー設定処理を実行する(S11)。この仮想バンパー設定処理では、車両1が走行している道路の道路幅Wrに応じて、仮想バンパー領域71を形成し、設定する処理を行う。この仮想バンパー設定処理の詳細については、図7を参照して後述する。
【0080】
仮想バンパー設定処理の次には、物体回避実行処理を行う(S12)。この物体回避実行処理では、仮想バンパー領域71内に物体80が存在する場合に、その仮想バンパー領域71内に仮想的に並設させた複数のバネ72の一部(バネ73)が、物体80によって収縮されたとして、そのバネ73に生じる弾性力Feの反作用として車両1に反発力Frを加え、車両1の走行を制御する処理を行う。この物体回避実行処理の詳細については、図10を参照して後述する。
【0081】
物体回避処理は、物体回避実行処理の終了後、その処理を終了する。
【0082】
次に、図7を参照して、図6の物体回避処理の一処理である仮想バンパー設定処理(S11)について説明する。図7は、この仮想バンパー設定処理を示すフローチャートである。
【0083】
仮想バンパー設定処理が実行されると、CPU91は、まず、車両1の現在位置に関する情報を現在位置検出手段27より取得する(S21)。次いで、S21の処理で取得した車両1の現在位置より、現在走行している道路等を地図情報DB92bに基づいて判断し、その道路に対して規定されている、仮想バンパー領域71の仮想バンパー幅(ここでは「適用仮想バンパー幅」と称す)を地図情報DB92bより取得する(S22)。
【0084】
次に、第1〜第4カメラ26a〜26dが設置されているか否か、及び、第1〜第4カメラ26a〜26dが故障していないか否かを判断し、第1〜第4カメラ26a〜26dによって撮像された画像の画像データによって得られる車両1の周辺情報(以下「センサ情報」と称す)を使用するか否かを判断する(S23)。
【0085】
その結果、センサ情報を使用すると判断された場合は(S23:Yes)、センサ情報から道路幅(走行可能幅)Wrを取得する(S24)。
【0086】
ここで、図8を参照して、道路幅Wrの取得方法について説明する。図8は、道路幅Wrの取得方法を説明する説明図である。走行制御装置100(CPU91)では、センサ情報82を第1〜第4カメラ26a〜26dから取得すると、車両1の左右方向における現在走行中の道路端の位置を検出する。そして、車両1の前方向から後方向に向けて、所定距離間隔毎に、車両1の右側面から車両1の右側の道路端までの距離である右側距離WRnと、車両1の左側面から車両1の左側の道路端までの距離である右側距離WLnとを検出する。
【0087】
ここで、nは1〜nmaxをとる自然数であり、車両1の前端における右側距離および左側距離がWR1及びWL1となる。また、車両1の後端における右側距離および左側距離がWRnmax及びWLnmaxとなる。
【0088】
そして、道路幅Wrは、以下の式によって算出される。なお、以下の式において、Wvは車両1の車幅である。また、θは、図8に示す通り、道路等の延設方向と車両1の前後方向とのなす角度であり、車両1が走行している道路等の延設方向に対する車両1の向きを示すものである。
【0089】
【数1】
ここで、角度θは、次のように算出する。第1〜第4カメラ26a〜26dから取得したセンサ情報82に基づき、車両1の左方向(右方向でも可)における現在走行中の道路端(以下「道路左端」と称す)の位置を検出すると、その検出位置から道路左端を結んだ直線の近似式を算出する。また、センサ情報82により、車両1の前端を結んだ直線の近似式も算出する。そして、道路左端を結んだ直線の近似式と車両1の前端を結んだ直線の近似式とから、道路左端を結んだ直線と車両1の前端を結んだ直線とのなす角度θ’を算出する。その算出した角度θ’から90°を引いた値を算出する。この角度θ’から90°を引いた値が、角度θとなる。
【0090】
なお、角度θは、車両1に設けられたGPSや、姿勢センサ(ジャイロセンサ)などに基づいて検出される車両1の絶対位置情報から、車両1が走行している道路等の延設方向に対する車両1の向きを判断して取得してもよい。
【0091】
図7に戻り説明を続ける。S24の処理に次いで、道路幅Wrと、基準形状での仮想バンパー領域71の仮想バンパー幅(短径Wvbの2倍。以下「基準仮想バンパー幅」と称す。)との比であるZ=Wr/(2Wvb)を計算する(S25)。
【0092】
そして、S25の処理で計算した比Zが1より小さいか否かを判断する(S26)。その結果、比Zが1よりも小さい場合は(S26:Yes)、道路幅Wrよりも基準仮想バンパー幅(2Wvb)の方が大きく、基準形状の仮想バンパー領域71が道路幅Wrを超える場合である。そこで、仮想バンパー領域71の仮想バンパー幅として適用する適用仮想バンパー幅として、2Z・Wvb=Wrとする(S27)。これにより、仮想バンパー領域71は、仮想バンパー幅が道路幅Wrとされる。
【0093】
ここで、図9(a)を参照して、仮想バンパー領域71が道路幅Wrを超えている状態を説明する。図9(a)は、仮想バンパー領域71が道路幅Wrを超えている状態を示す図である。
【0094】
図9(a)のように、仮想バンパー領域71が道路幅Wrを超えている場合、その道路端81にあるもの、例えば、壁やガードレール、縁石などが障害物となって、仮想バンパー領域71内に存在することになるので、それらから大きな反発力が車両1の左右方向から加えられることになる。これにより、車両1の操舵が左右に振られてしまい、安定して車両1を走行させることができないという問題点がある。
【0095】
また、車両1のコーナーから斜め方向に配設されたバネ72からも、壁やガードレール、縁石などの存在によって、車両1に反発力が加えられるので、その反発力が大きい場合には、車両1が道路を前進可能であるにもかかわらず、停止してしまう、という問題点がある。
【0096】
仮想バンパー設定処理では、仮想バンパー領域71が道路幅Wrを超えている場合、S27の処理によって、仮想バンパー領域71の適用仮想バンパー幅を基準仮想バンパー幅である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。従って、車両1が狭い領域を走行する場合においても、物体80との衝突回避を行いつつ、車両1を安定して走行させることができる。
【0097】
図7に戻って説明を続ける。S26の処理の結果、道路幅Wrと、基準形状での仮想バンパー領域71の仮想バンパー幅(短径Wvbの2倍)との比Zが1以上である場合は(S26:No)、基準仮想バンパー幅(2Wvb)と道路幅Wrとが同じか、基準仮想バンパー幅(2Wvb)よりも道路幅Wrの方が大きく、基準形状の仮想バンパー領域71が道路幅Wr内にある場合である。そこで、仮想バンパー領域71の仮想バンパー幅として適用する適用仮想バンパー幅として、基準仮想バンパー幅(2Wvb)とする(S28)。これにより、仮想バンパー領域71は、仮想バンパー幅が基準形状と同じ幅とされる。
【0098】
次いで、S27又はS28の処理の後、センサ情報から算出した適用仮想バンパー幅、即ち、S27又はS28の処理よって設定した適用仮想バンパー幅が、S22の処理によって、地図情報DB92bから取得した適用仮想バンパー幅よりも小さいか否かを判断する(S29)。その結果、センサ情報から算出した適用仮想バンパー幅の方が小さければ(S29:No)、そのセンサ情報から算出した適用仮想バンパー幅を採用して(S30)、外郭形成処理を実行する(S32)。
【0099】
また、S29の処理の結果、センサ情報から算出した適用仮想バンパー幅が、地図情報DB92bから取得した適用仮想バンパー幅と同じか、地図情報DB92bから取得した適用仮想バンパー幅よりも大きい場合は(S29:No)、地図情報DB92bによる適用仮想バンパー幅を採用して(S31)、外郭形成処理を実行する(S32)。
【0100】
また、S23の処理の結果、センサ情報を使用しないと判断された場合も(S23:No)、地図情報DB92bによる適用仮想バンパー幅を採用して(S31)、外郭形成処理を実行する(S32)。
【0101】
ここで、センサ情報が使用でき、また、センサ情報から算出した適用仮想バンパー幅が信頼できるものである場合、仮想バンパー設定処理では、積極的にセンサ情報から算出した適用仮想バンパー幅を採用して、仮想バンパー領域71の外郭形成を行う。
【0102】
センサ情報を用いることで、道路状況が変化している場合に、その変化に対応して仮想バンパー幅を決定することができる。また、工事や駐停車中の車両によって、道路の一部が通行不能な場合に、車両1が走行可能な領域の幅を道路幅Wrとすることで、そのような一時的な道路の変化にも対応して、仮想バンパー幅を決定することができる。
【0103】
一方、センサ情報に基づいて算出した仮想バンパー幅が、地図情報DB92cより取得した仮想バンパー幅よりも大きい場合には、地図情報DB92cより取得した適用仮想バンパー幅を採用して、仮想バンパー領域71の外郭形成を行う。この場合、上述した通り、センサ情報から取得した道路幅Wrが誤っている可能性が高い。そこで、この場合には、地図情報DB92cより取得した適用仮想バンパー幅を採用することにより、道路等の実情により合った仮想バンパー領域71を設定できる。
【0104】
また、第1〜第4カメラ26a〜26dが設置されていなかったり、故障していたりして、センサ情報が取得できない場合にも、地図情報DB92cより取得した適用仮想バンパー幅を採用して、仮想バンパー領域71の外郭形成が行われるので、センサ情報が得られない場合においても、物体の衝突回避を行いつつ、車両を安定して走行させる機会を増やすことができる。
【0105】
ここで、図9(b)を参照して、S32の外郭形成処理について説明する。図9(b)は、外郭形成処理を説明する図である。
【0106】
S30又はS31の処理によって、適用仮想バンパー幅が決定されると、その適用仮想バンパー幅の半分の長さを、今回形成する仮想バンパー領域71の短径Wvb’とする。そして、基準形状の短径Wvbと、今回形成する仮想バンパー領域71の短径Wvb’との比をQ=Wvb’/Wvbとすると、今回形成する仮想バンパー領域71の長径Lvb’を以下の式(4)で算出する。
【0107】
Lvb’=Q・Lvb ・・・(4)
そして、以下の式(5)によって、仮想バンパー領域71を形成し、設定する。
【0108】
x2/Wvb’2+y2/Lvb’2=1 ・・・(5)
これにより、S30又はS31の処理によって採用された適用仮想バンパー幅を有する仮想バンパー領域71が設定される。
【0109】
ここで、仮想バンパー幅が、道路幅Wrに合わせて基準形状から縮小された場合、仮想バンパー領域71の長径、即ち、車両1の前後方向における仮想バンパー領域81の長さ(以下「仮想バンパー長さ」と称す)も、その縮小度合いに合わせて基準形状から縮小されることになる。車両1が道路幅Wrの狭いところを走行する場合、通常は、速度を落として走行する。よって、車両1が走行する道路幅Wrが狭いほど、仮想バンパー幅と共に、仮想バンパー長さを短くすることにより、車両1の進行方向において遠くに物体80が存在する場合に、必要以上に車両1に対して反発力Frが加えられることを抑制できる。よって、車両1をより遠くまで進行させることができるので、物体80との衝突回避を行いつつ、車両1をより安定して走行させることができる。
【0110】
図7に戻り説明を続ける。外郭形成処理(S32)の次に、バンパー形成処理を実行する(S33)。このバンパー形成処理では、図2に示すように、仮想バンパー領域71内に、バネ72を仮想的に並設する。具体的には、各バネ72の一端を、車両1の外周11において、10cm間隔で取着する。そして、車両1の前方側または後方側の仮想バンパー領域71に配設されるバネ72f,72bは、一端が車両1の前方先端(前端)または後方先端(後端)に取着された状態で、バネの長さ方向が車両1の前後方向と平行となるように配設し、他端を車両1前方側または後方側の外縁71aに位置させる。
【0111】
また、車両1の右側または左側の仮想バンパー領域71に配設されるバネ72r,72lは、一端が車両1の右側面または左側面に取着された状態で、バネの長さ方向が車両1の左右方向と平行となるように配設し、他端を車両1右側または左側の外縁71aに位置させる。
【0112】
また、車両1の右前コーナー,左前コーナー,左後コーナー,右後コーナー側の仮想バンパー領域71に配設されるバネ72fr,72fl,72bl,72brは、一端が車両1の対応するコーナー部分に取着された状態で、バネの長さ方向が、車両1の右前方向,左前方向,左後方向または右後方向となるように配設し、他端を車両1の左前コーナー,左後コーナー,右後コーナー側の外縁71aに位置させる。
【0113】
S28の処理では、このようにして配設した各バネ72のバネ情報をバネ設定テーブルメモリ93aに格納することで、バネ72の設定を完了する。そして、S28の処理の終了後、仮想バンパー設定処理を終了し、物体回避処理へ戻る。
【0114】
次いで、図10を参照して、図6の物体回避処理の一処理である、物体回避実行処理(S12)について説明する。図10は、この物体回避実行処理を示すフローチャートである。
【0115】
物体回避実行処理が実行されると、CPU91は、まず、第1〜第4カメラ26a〜26dにて撮像された画像の画像データから、車両1の周囲に存在する物体80と、車両1を基準としたその物体80の位置とを判断する(S51)。次に、S51の処理にて判断された物体80の位置と、バネ設定テーブルメモリ93aに格納された各バネ72のバネ情報とから、物体80の存在によって、仮想バンパー領域71内に仮想的に並設されたバネ72の中から収縮されたバネ73を検索する(S52)。
【0116】
そして、S52の処理の結果、収縮されたバネ73があるか否かを判断する(S53)。その結果、収縮されたバネ73がなければ(S53:No)、仮想バンパー領域71内に物体80がないと判断し、そのまま物体回避実行処理を終了する。
【0117】
一方、収縮されたバネ73があると判断された場合(S53:Yes)、仮想バンパー領域71内に物体80があると判断できるので、次に説明するS54〜S59の処理を実行して、物体80を回避するよう、車両1の走行を制御する。
【0118】
まず、S54の処理では、収縮したバネ73から車両1に対して加えられる反発力Frを算出する(S54)。反発力Frの大きさは上述の式(1)によって算出される。このとき、式(1)で用いるバネ定数は、収縮したバネ73のバネ定数をバネ設定テーブルメモリ93aより取得する。なお、収縮したバネ73が複数ある場合は、それぞれのバネ73から加えられる反発力の向きも考慮して、すべてのバネ73から車両1に加えられる反発力を算出する。
【0119】
次に、S54の処理にて算出した各バネ72(バネ73)から加えられた反発力Frの前後方向成分を合成して、車両1の重心Cに加えられる前後方向の反発力Fryを算出する。(S55)。そして、以下の式(6)により、車両1の加速度aを算出する(S56)。
【0120】
a=Fry/m ・・・(6)
ここで、mは、車両1の重量(質量)である。
【0121】
続くS58の処理では、前進時において、S54の処理にて算出した各バネ72(73)から加えられた反発力Frの左右方向成分から、車両1の重心Cに加えられる反モーメント力Mを算出する(S58)。
【0122】
そして、算出した反モーメント力Mから、以下の式により、車両1の操舵角δfを算出する。
【0123】
【数2】
なお、車両1が前進する場合、後進する場合のいずれにおいても、その車両速度が毎秒0.5m以下である場合、次の式(7)により、車両1の操舵角δfを算出する。
【0124】
δf=−M/(2・Kf・Lf) ・・・(7)
ここで、[数2],式(7)の各式で用いられる各種パラメータの意味について、図11を参照して説明する。図11は、反モーメント力によって取り得るべき車両1の操舵角δfを算出する場合に用いるパラメータを説明する図である。
【0125】
まず、Lfは、前輪軸と車両1の重心との距離であり、Lrは、後輪軸と車両1の重心との距離である。Kfは、前輪等価コーナーリングスティフネスであり、Krは、後輪等価コーナーリングスティフネスである。βは、重心位置における車両1の横滑り角であり、γは車両1のヨーレートである。Vは、車両速度である。なお、図10において、δrは、後輪における操舵角であるが、本実施形態における車両1は、前輪のみ操舵可能であるので、δrを0として取り扱っている。
【0126】
図10に戻り説明を続ける。S58の処理が終了すると、続いて、S59の処理を実行する。S59の処理では、S56の処理により算出した加速度aと、現在の車両1の速度と、運転者によって踏み込まれたアクセルペダルの踏み込み量とから、目標とすべき車両速度を決定し、その目標とすべき車両速度を示す制御信号を、後述する車輪駆動装置3(図1参照)へ送信する。また、S59の処理では、S58の処理により算出した操舵角δfを示す制御信号を、後述する操舵駆動装置5(図1参照)へ送信する。そして、S59の処理の終了後、物体回避実行処理を終了する。
【0127】
このS59の処理により、車両1が、前後方向の反発力Fryによって生じる車両1の加速度を反映させた速度で走行するように、車両1の走行の制御が行われる。また、車両1が、左右方向の反発力によって生じる反モーメント力Mを反映させた操舵角で走行するように、車両1の走行の制御が行われる。よって、容易に且つ速やかに、その物体80を回避しながら車両1を走行させることができる。
【0128】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の改良変形が可能であることは容易に推察できるものである。例えば、上記各実施形態で挙げた数値は一例であり、他の数値を採用することは当然可能である。
【0129】
上記実施形態では、仮想バンパー設定処理(図7)のS28の処理によって、基準仮想バンパー幅(2Wvb)よりも道路幅Wrの方が大きい場合には、仮想バンパー領域71の仮想バンパー幅として適用する適用仮想バンパー幅として、基準仮想バンパー幅(2Wvb)とする、即ち、仮想バンパー領域71の仮想バンパー幅を基準形状と同じ幅とする場合について説明したが、必ずしもこれに限られるものではない。基準仮想バンパー幅(2Wvb)よりも道路幅Wrの方が大きい場合には、仮想バンパー領域71の仮想バンパー幅を基準形状よりも大きい幅となるように、基準形状を拡大してもよい。これにより、車両1が基準仮想バンパー幅(2Wvb)よりも広い道路幅の道路等を走行している場合は、仮想バンパー領域71の仮想バンパー幅を道路幅Wrに合わせて拡大できる。よって、基準仮想バンパー幅よりも広い道路幅の道路等において、車両1が道路幅方向に進行しようとした場合、その道路等の道路端81にあるもの(壁、ガードレース、縁石など)が仮想バンパー領域71に存在することになり、それが障害物となって、車両1に反発力Frが加えられることになる。従って、車両1が道路幅の広い道路を走行する場合に、道路端に寄りすぎてしまうことを抑制できる。
【0130】
また、この場合、仮想バンパー領域71の仮想バンパー幅を、道路幅Wrとするか、又は、道路幅Wrよりも若干長い幅となるように設定してもよい。例えば、適用仮想バンパー幅として、1.1×Wrを設定してもよい。ただし、Wrに乗ずる係数は、適用仮想バンパー幅が道路幅Wrよりも大きくなりすぎない程度に任意の値であってよい。これにより、適用仮想バンパー幅が道路幅Wrと同じか、道路幅Wrよりも若干大きく設定されるので、道路端81が仮想バンパー領域71の外縁と重なるか、仮想バンパー領域71内に少しだけ入り込む。よって、車両1が、道路端81にある壁、ガードレール、縁石などから反発力を受けないか、反発力を受けたとしても小さな反発力を受けることになるので、車両1の操舵が左右に振られたり、車両1が進行できるにもかかわらず停止させられたりすることなく、車両1が道路端81に無用に近づいてしまうことを抑制できる。
【0131】
上記実施形態では、仮想バンパー設定処理(図7)のS32の外郭形成処理において、仮想バンパー幅が、道路幅Wrに合わせて基準形状から縮小された場合、仮想バンパー領域71の長径、即ち、車両1の前後方向における仮想バンパー領域81の仮想バンパー長さも、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小する場合について説明したが、必ずしもこれに限られるものではない。例えば、仮想バンパー長さの縮小度合いが、仮想バンパー幅の縮小度合いよりも小さくなるように、仮想バンパー長さを基準形状から縮小してもよい。また、仮想バンパー長さについては、図12(a)に示すように、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。また、車両1の速度が遅い場合は、仮想バンパー長さを、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小し、車両1の速度が速い場合は、仮想バンパー長さについては、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。また、車両1の速度が第1所定速度未満の場合は、仮想バンパー長さを、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小し、車両1の速度が第1所定速度以上第2所定速度未満の場合は、仮想バンパー長さの縮小度合いが、仮想バンパー幅の縮小度合いよりも小さくなるように、仮想バンパー長さを基準形状から縮小し、車両1の速度が第2所定値以上の場合は、仮想バンパー長さについては、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。これにより、道路幅Wrの狭い場所を車両1が速い速度で進行するような場合があっても、早めに、車両1の進行方向にある物体80との回避動作を行うことができる。よって、車両1を安定して走行させつつ、安全に物体80との衝突回避を行うことができる。
【0132】
また、上記実施形態では、仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー設定処理(図7)のS27の処理によって、仮想バンパー領域71の適用仮想バンパー幅を基準仮想バンパー幅(2Wvb)から縮小し、道路幅Wrとする場合について説明したが、必ずしも仮想バンパー幅を道路幅Wrとする必要はなく、基準仮想バンパー幅よりも縮小すればよい。例えば、図12(b)に示すように、適用仮想バンパー幅(2Wvb’)として、道路幅Wrよりも若干長い幅となるように設定してもよい。例えば、2Wvb’=1.1×Wrとして、適用仮想バンパー幅を設定してもよい。ただし、Wrに乗ずる係数は、適用仮想バンパー幅が道路幅Wrよりも大きくなりすぎない程度に任意の値であってよい。これにより、適用仮想バンパー幅が道路幅Wrよりも若干大きく設定されるので、道路端81が仮想バンパー領域71内に少しだけ入り込む。よって、車両1が、道路端81にある壁、ガードレール、縁石などから小さな反発力を受けることになるので、車両1の操舵が左右に振られたり、車両1が進行できるにもかかわらず停止させられたりすることなく、車両1が道路端81に無用に近づいてしまうことを抑制できる。
【0133】
なお、この場合、仮想バンパー領域71の仮想バンパー長さについては、上記実施形態と同様に、仮想バンパー幅の縮小度合いと同じ縮小度合いで基準形状から縮小してもよいし、上述した変形例のように、仮想バンパー長さの縮小度合いが、仮想バンパー幅の縮小度合いよりも小さくなるように、仮想バンパー長さを基準形状から縮小してもよい。また、図12(a)に示す場合と同様に、仮想バンパー長さについては、仮想バンパー幅の縮小度合いにかかわらず、基準形状と同一の長さとなるようにしてもよい。
【0134】
また、上記実施形態において、仮想バンパー領域71の基準形状を図4に示すような楕円形状とする場合について説明したが、必ずしもこれに限られるものではない。例えば、図13(a)に示す通り、車両1中央の前後軸と車両1の前輪軸との交点、及び、その前後軸と車両1の後輪軸との交点を中心とする扇形形状をした領域を、車両1の前方方向と後方方向とに設けた形状を、仮想バンパー領域71の基準形状としてもよい。この場合、基準形状メモリ92bには、扇形の半径Rvbと、扇形の範囲(例えば、図13(a)に示す角度θvb1〜θvb4)を格納してもよい。
【0135】
図13(a)に示す形状を仮想バンパー領域71の基準形状とした場合、仮想バンパー設定処理のS27の処理では、図13(b)又は(c)に示す方法で、仮想バンパー領域71の仮想バンパー幅を縮小してもよい。つまり、図13(b)に示すように、車両1前方側の扇形の範囲を0〜180°とし,車両1後方側の扇形の範囲を180°〜360°として、扇形の半径Rvb’を道路幅の半分(Wr/2)として、仮想バンパー領域71の仮想バンパー幅を縮小してもよい。また、図13(c)に示すように、車両1前方側の扇形の範囲を、基準形状と同様に、θvb1〜θvb2とし、車両1後方側の扇形の範囲を、基準形状と同様に、θvb3〜θvb4として、扇形の半径Rvb’’を次の式(8)で算出することで、仮想バンパー領域71の仮想バンパー幅を縮小してもよい。
【0136】
Rvb’’=Wr/(2cos(θvb1)) ・・・(8)
このように、仮想バンパー領域71の基準形状が扇形の場合においても、図13(b),(c)のように、仮想バンパー領域71を縮小することにより、仮想バンパー領域71を、道路幅の内側に存在させることができる。これにより、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。従って、車両1が狭い領域を走行する場合においても、物体80との衝突回避を行いつつ、車両1を安定して走行させることができる。
【0137】
なお、図13(b)のように仮想バンパー領域71を縮小する場合において、扇形の半径Rvb’を、道路幅Wrの半分より若干大きくなるように、設定してもよい。例えば、Rvb’=1.1×(Wr/2)としてもよい。また、図13(c)のように仮想バンパー領域71を縮小する場合においても、扇形の半径Rvb’’を、次の式(9)を用いて設定してもよい。
【0138】
Rvb’’=1.1×Wr/(2cos(θvb1)) ・・・(9)
ただし、(Wr/2)又は(Wr/(2cos(θvb1)))に乗ずる係数は、適用仮想バンパー幅が道路幅Wrよりも大きくなりすぎない程度に任意の値であってよい。これにより、道路端81が仮想バンパー領域71内に少しだけ入り込む。よって、車両1が、道路端81にある壁、ガードレール、縁石などから小さな反発力を受けることになるので、車両1の操舵が左右に振られたり、車両1が進行できるにもかかわらず停止させられたりすることなく、車両1が道路端81に無用に近づいてしまうことを抑制できる。
【0139】
上記実施形態では、仮想バンパー領域71の基準仮想バンパー幅と、道路幅Wrとの比から、仮想バンパー領域71における仮想バンパー幅と仮想バンパー長さとの縮小度合いを決定したが、必ずしもこれに限られるものではなく、図14に示すように、基準形状の仮想バンパー領域71と道路とが重なる部分の面積Srを算出し、その面積Srと、基準形状の仮想バンパー領域71の面積Svbとの比(=Sr/Svb)、若しくは、これらの比の平方根((Sr/Svb)1/2)を、仮想バンパー領域71における仮想バンパー幅および仮想バンパー長さの縮小度合いZとして、決定してもよい。
【0140】
この場合、図4に示す基準形状に対して、次の式(10)を適用することにより、その基準形状から縮小された仮想バンパー領域71を形成し、設定してもよい。
【0141】
x2/(Z・Wvb)2+y2/(Z・Lvb)2=1 ・・・(10)
上記実施形態における仮想バンパー領域71では、反発力Frが作用する作用点を車両1の外周に分散させ、その分散させた作用点から仮想バンパー領域71の外縁71aに向けて仮想的にバネ72を並設する場合について説明したが、必ずしもこれに限られるものではなく、反発力Frが作用する作用点を車両1の任意の1点または複数個所の点に集中させて、仮想バンパー領域71に複数のバネ72を並設してもよい。例えば、車両1中央の前後軸と車両1の前輪軸との交点、及び、その前後軸と車両1の後輪軸との交点を、反発力Frが作用する作用点とし、これら2か所に、バネ72の一端を取着させて、バネ72を仮想バンパー領域71に並設させてもよい。
【0142】
上記実施形態において、仮想バンパー領域71内に存在する物体80によって車両1に反発力Frが加えられた場合に、前輪2FL,2FRの操舵角がその反発力Frに基づいて算出した操舵角δfとなるよう、走行制御装置100が操舵駆動装置5を制御する場合について説明したが、車両1にステアリングホイール13に回転力を加える駆動装置を設け、走行制御装置100は、その駆動装置を制御して、操舵角δfの方向に、操舵角δfの大きさに応じた回転力をステアリングホイール13に加えるようにしてもよい。運転者は、ステアリングホイール13に加えられた回転力によってステアリングホイール13を回転操作することにより、物体80との衝突回避を行うことができる。
【0143】
上記各実施形態では、第1〜第4カメラ26a〜26dを搭載して、車両1の周辺情報を取得する場合について説明したが、周辺情報を取得する手段として、ステレオカメラ、赤外線カメラを用いてもよいし、ミリ波レーダ、レーザレーダ、UWB(Ultra Wide Band)レーダ等の各種レーダや、ソナーを用いてもよい。また、道路と車両との間の通信である路車間通信や、他車との間の通信による車車間通信によって、物体の位置情報を取得してもよい。またこれらを複数組み合わせて使用してもよい。
【0144】
例えば、レーザレーダは、レーザビームを車両1の周囲へ照査し、その反射の有無や反射を検出した方向およびレーザビームを照射してから反射を検出するまでの時間に基づいて、車両1の周辺にある道路や物体の形状等を把握するものである。走行制御装置100は、このレーザレーダを用いることにより、レーザレーダにより照射したレーザビームの反射の検出結果から、車両1の周辺に存在する物体等の形状をマップ化し、それに基づいて、物体の位置等を検出するように構成してもよい。
【0145】
上記各実施形態では、操舵装置5がラック&ピニオン式のステアリングギヤとして構成される場合について説明したが、必ずしもこれに限られるものではなく、ボールナット式等の他のステアリングギヤ機構を採用することは当然可能である。
【符号の説明】
【0146】
1 車両
26a〜26d 第1〜第4カメラ(検出手段)
100 走行制御装置
S24 (取得手段)
S25〜S32 (設定手段)
S54 (算出手段)
S59 (制御手段)
【特許請求の範囲】
【請求項1】
車両の周囲に存在する物体を検出する検出手段と、
その検出手段により検出された物体であって、前記車両に設定された所定領域内に存在する物体との衝突を回避するための仮想的な反発力を、前記物体と前記車両との位置関係に基づいて算出する算出手段と、
その算出手段により算出された反発力が前記車両に加えられたものとして、前記車両の走行に伴う制御を行う制御手段と、
前記車両が走行可能な領域に関する情報を取得する取得手段と、
その取得手段により取得された情報により、前記所定領域を設定する設定手段とを備えることを特徴とする走行制御装置。
【請求項2】
前記設定手段は、前記車両が走行可能な領域が狭いほど、前記所定領域の範囲が狭くなるように、前記所定領域を設定することを特徴とする請求項1記載の走行制御装置。
【請求項3】
前記設定手段は、前記車両が走行可能な領域の前記車両の側面方向における幅が狭いほど、少なくとも前記所定領域における前記側面方向の幅が狭くなるように、前記所定領域を設定することを特徴とする請求項2記載の走行制御装置。
【請求項4】
前記設定手段は、前記車両が走行可能な領域の前記車両の側面方向における幅が狭いほど、前記所定領域における前記側面方向の幅を狭くすると共に、前記所定領域における車両の前後方向における長さが狭くなるように、前記所定領域を設定することを特徴とする請求項3記載の走行制御装置。
【請求項5】
前記設定手段は、前記車両が走行可能な領域の前記車両の側面方向における幅が狭いほど、前記所定領域における前記側面方向の幅を狭くする一方、前記所定領域における車両の前後方向における長さが所定の長さに維持されるように、前記所定領域を設定することを特徴とする請求項3記載の走行制御装置。
【請求項6】
請求項1から5のいずれかに記載の走行制御装置を備えることを特徴とする車両。
【請求項1】
車両の周囲に存在する物体を検出する検出手段と、
その検出手段により検出された物体であって、前記車両に設定された所定領域内に存在する物体との衝突を回避するための仮想的な反発力を、前記物体と前記車両との位置関係に基づいて算出する算出手段と、
その算出手段により算出された反発力が前記車両に加えられたものとして、前記車両の走行に伴う制御を行う制御手段と、
前記車両が走行可能な領域に関する情報を取得する取得手段と、
その取得手段により取得された情報により、前記所定領域を設定する設定手段とを備えることを特徴とする走行制御装置。
【請求項2】
前記設定手段は、前記車両が走行可能な領域が狭いほど、前記所定領域の範囲が狭くなるように、前記所定領域を設定することを特徴とする請求項1記載の走行制御装置。
【請求項3】
前記設定手段は、前記車両が走行可能な領域の前記車両の側面方向における幅が狭いほど、少なくとも前記所定領域における前記側面方向の幅が狭くなるように、前記所定領域を設定することを特徴とする請求項2記載の走行制御装置。
【請求項4】
前記設定手段は、前記車両が走行可能な領域の前記車両の側面方向における幅が狭いほど、前記所定領域における前記側面方向の幅を狭くすると共に、前記所定領域における車両の前後方向における長さが狭くなるように、前記所定領域を設定することを特徴とする請求項3記載の走行制御装置。
【請求項5】
前記設定手段は、前記車両が走行可能な領域の前記車両の側面方向における幅が狭いほど、前記所定領域における前記側面方向の幅を狭くする一方、前記所定領域における車両の前後方向における長さが所定の長さに維持されるように、前記所定領域を設定することを特徴とする請求項3記載の走行制御装置。
【請求項6】
請求項1から5のいずれかに記載の走行制御装置を備えることを特徴とする車両。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−77265(P2013−77265A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−218097(P2011−218097)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]