
走行制御装置
【課題】ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる走行制御装置を提供する。
【解決手段】走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知した場合、アクセル開度を一時的に制限してエンジントルクを一時的に絞ることにより、車両の走行を制御する。また、走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知していない状態において、車両が後退走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御する。
【解決手段】走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知した場合、アクセル開度を一時的に制限してエンジントルクを一時的に絞ることにより、車両の走行を制御する。また、走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知していない状態において、車両が後退走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シフトバイワイヤシステムを搭載した車両の走行を制御する走行制御装置に関するものである。
【背景技術】
【0002】
各種のセンサやECU(電子制御ユニット)などで構成されている現状のシフトバイワイヤシステムでは、シフトレバー信号とミッションにおける実際のシフトポジションとの比較ならびにシフトポジションを検知する手段の冗長化およびECUの冗長化などによって、シフトに関し何らかの矛盾があった場合には車両の走行を制限するなどの構成をとることで、ドライバの意図せぬ車両の走行に対し制限を設けている。
【0003】
ここで、特許文献1には、シフト信号とシフト位置が不一致のときはエンジンの出力を低下させる制御を行うことでドライバの意図せぬ急発進を防止する技術が開示されている。特許文献2には、シフト切り替え時に電子ブレーキを掛けることで、シフト切り替えを中断した時の不意の急発進を防止する技術が開示されている。特許文献3には、一般の自動変速システムにおいてニュートラルからの変速時にクラッチを係合することで急発進を防止する技術が開示されている。特許文献4には、シフトを前進からニュートラルに切り替えるときや後進からニュートラルに切り替えるときはシフトがニュートラルになるまでシフトの動作を禁止する技術が開示されている。
【0004】
【特許文献1】特開平5−272633号公報
【特許文献2】特開2005−127469号公報
【特許文献3】特開2002−195314号公報
【特許文献4】特許第3948369号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、シフトポジションセンサからの入力信号を前提として制御する現状のシステムでは、当該センサの操作系も含めた当該システムの構造上、当該センサからの入力信号を正として、ドライバの意図する又は走行上安全なシフトポジションを制御することしかできない。よって、ドライバの意図せぬ車両の走行が当該ドライバの誤操作(操作ミス)に因るものであった場合には、現状のシステムでは当該誤操作は異常として認識されない。そのため、このような人為的な操作ミスに因るドライバの意図せぬ車両の走行を現状のシステムで防ぐことは困難であるという問題点があった。
【0006】
本発明は、上記問題点に鑑みてなされたものであって、ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明にかかる走行制御装置は、シフトバイワイヤシステムを搭載した車両の走行を制御する走行制御装置であって、シフトポジションの前進および後進間の切り替わりを検知する切替検知手段と、前記切替検知手段で前記シフトポジションが切り替わったことを検知した場合、アクセル開度を制限することにより前記車両の走行を制御する走行制御手段とを備えたことを特徴とする。
【0008】
また、本発明にかかる走行制御装置は、前記に記載の走行制御装置において、前記車両が走行していることを検知する走行検知手段をさらに備え、前記走行制御手段は、前記切替検知手段で前記シフトポジションが前進から後進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、前記切替検知手段で前記シフトポジションが後進から前進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が前進走行していることを検知したときには、ブレーキを作動することを特徴とする。
【発明の効果】
【0009】
本発明によれば、シフトポジションが切り替わったことを検知した場合、アクセル開度を制限することにより車両の走行を制御する。これにより、ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができるという効果を奏する。
【0010】
また、本発明によれば、シフトポジションが前進から後進に切り替わったことを検知していない状態において、車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、シフトポジションが後進から前進に切り替わったことを検知していない状態において、車両が前進走行していることを検知したときには、ブレーキを作動する。これにより、センサの故障や想定されないセンサの異常その他センサの誤作動が起こったとしても、ドライバの意図せぬ車両の走行(具体的には車両の逆走)を効果的に防ぐことができるという効果を奏する。
【0011】
ここで、従来技術によれば、現状のシステムでセンサの異常を確定するには2重系センサの各々の公差やノイズなどの影響を排除するため、現状のシステムでは当該異常を確定するのにある程度の時間が必要となる。そのため、当該異常を確定するまでの間は、当該異常に因る車両の逆走を防ぐことは困難である。すなわち、現状のシステムでは、センサの故障や想定されないセンサの異常その他センサの誤作動に因る車両の逆走を完全に防ぐことは困難である。そこで、本発明によれば、シフトポジションが前進から後進に切り替わったことを検知していない状態において、車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、シフトポジションが後進から前進に切り替わったことを検知していない状態において、車両が前進走行していることを検知したときには、ブレーキを作動することにより、センサの故障や想定されないセンサの異常その他センサの誤作動が起こったとしても、ドライバの意図せぬ車両の走行(具体的には車両の逆走)を効果的に防ぐことができる。
【発明を実施するための最良の形態】
【0012】
以下に、本発明にかかる走行制御装置の実施の形態を図面に基づいて詳細に説明する。なお、本実施の形態により本発明が限定されるものではない。
【0013】
[1.本実施の形態の構成]
本実施の形態にかかる走行制御装置を含むシフトバイワイヤシステム1の構成について、図1を参照して説明する。図1はシフトバイワイヤシステム1の構成の一例を示すブロック図である。
【0014】
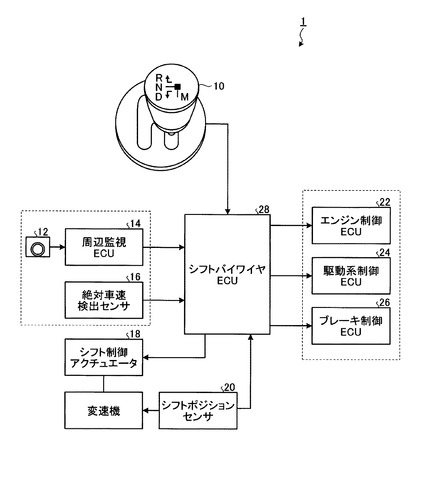
シフトバイワイヤシステム1は、シフトレバー10と、シフト制御と独立して実際の車両の挙動(走り出す方向)を検知する手段としてのカメラ12、周辺監視ECU14および絶対車速検出センサ16と、シフト制御アクチュエータ18と、シフトポジションセンサ20と、ECUの指示するシフトポジションに関わらず車両の走行を制御する手段としてのエンジン制御ECU22、駆動系制御ECU24およびブレーキ制御ECU26と、シフトバイワイヤECU28と、を含んで構成される。シフトバイワイヤシステム1は、シフトポジションを、シフトバイワイヤECU28からの指令により切り替えるシステムである。
【0015】
シフトレバー10は、シフトポジションを切り替える(変速機のギアの組み合わせを変える)ためにドライバが操作する部材である。シフトレバー10はシフトバイワイヤECU28に接続されている。
【0016】
カメラ12、周辺監視ECU14および絶対車速検出センサ16は、本発明における走行検知手段に含まれるものである。カメラ12は撮影機である。カメラ12は周辺監視ECU14に接続されている。周辺監視ECU14は、カメラ12を制御して車両周辺を監視することで当該車両の挙動を検知する電子制御ユニットである。絶対車速検出センサ16は、車両の絶対車速を検出するセンサであって車両が前進又は後進しているか否かを判定できるものである。周辺監視ECU14および絶対車速検出センサ16はシフトバイワイヤECU28に接続されている。
【0017】
シフト制御アクチュエータ18は、シフトバイワイヤECU28から送られてきたシフトポジションに関する指令に基づいて、変速機のギアの組み合わせを切り替える作動装置である。シフトポジションセンサ20は、本発明における切替検知手段に相当するものであり、変速機のギアの組み合わせの状態からシフトポジションを検知するセンサである。シフト制御アクチュエータ18およびシフトポジションセンサ20はシフトバイワイヤECU28に接続されている。
【0018】
エンジン制御ECU22は、エンジンを制御する電子制御ユニットである。駆動系制御ECU24は、車両の駆動系を制御する電子制御ユニットである。ブレーキ制御ECU26は、ブレーキを制御する電子制御ユニットである。エンジン制御ECU22、駆動系制御ECU24およびブレーキ制御ECU26はシフトバイワイヤECU28に接続されている。
【0019】
シフトバイワイヤECU28は走行制御手段に相当するものである。シフトバイワイヤECU28は、ドライバによりシフトレバー10が操作されると、当該シフトレバー10の位置に対応するシフトポジションに切り替えるようシフト制御アクチュエータ18に指令を出すことにより、当該シフト制御アクチュエータ18にシフトポジションを切り替えさせる。シフトバイワイヤECU28は、周辺監視ECU14、絶対車速検出センサ16およびシフトポジションセンサ20から送られてきた情報を総合的に判断して、エンジン制御ECU22、駆動系制御ECU24およびブレーキ制御ECU26を適宜制御することにより、車両の走行を制御(制限)する。
【0020】
[2.本実施の形態の処理]
上述した構成のシフトバイワイヤシステム1で行われる走行制御処理の一例を、図2から図5を参照して説明する。図2は走行制御処理の一例を示すフローチャートである。
【0021】
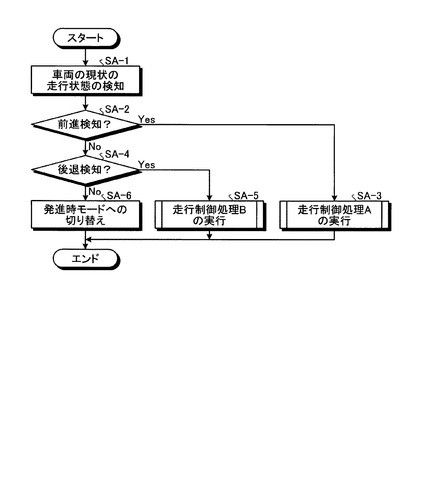
まず、シフトバイワイヤECU28は、周辺監視ECU14から送られてきたカメラ12で撮影した映像に関する情報および/または絶対車速検出センサ16から送られてきた車速に関する情報に基づいて、車両の現状の走行状態を検知する(ステップSA−1)。
【0022】
つぎに、シフトバイワイヤECU28は、ステップSA−1での検知結果が「車両が前進している」というものであった場合(ステップSA−2:Yes)には、後述する走行制御処理Aを実行する(ステップSA−3)。
【0023】
ここで、走行制御処理Aの一例を図3および図4を参照して説明する。図3は走行制御処理Aの一例を示すフローチャートである。図4はアクセル開度の制限方法の一例を示す図である。
【0024】
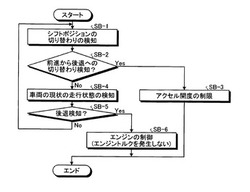
まず、シフトバイワイヤECU28は、シフトポジションセンサ20から送られてきたシフトポジションに関する情報に基づいて、シフトポジションの切り替わりがあったか否かを検知する(ステップSB−1)。
【0025】
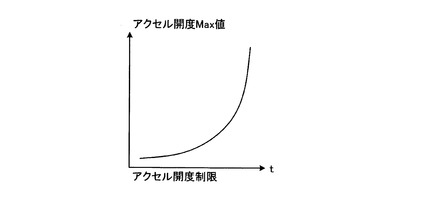
つぎに、シフトバイワイヤECU28は、ステップSB−1での検知結果が「シフトポジションが前進から後退に切り替わった」というものであった場合(ステップSB−2:Yes)には、最初のアクセル開時またはシフトポジションの切り替わり後の最初のアクセル開時に所定のアクセル開度aでエンジントルクを一時的にクランプする(絞る)よう、エンジン制御ECU22に指令を出す(ステップSB−3)。なお、時間が経過するにつれて指数関数的にアクセル開度の最大値を高めていく制限方法(図4参照)で、エンジントルクを一時的に制限してもよい。
【0026】
図3に戻り、一方、シフトバイワイヤECU28は、ステップSB−1での検知結果が「シフトポジションが前進から後退に切り替わった」というものでなかった場合(ステップSB−2:No)には、周辺監視ECU14から送られてきたカメラ12で撮影した映像に関する情報および/または絶対車速検出センサ16から送られてきた車速に関する情報に基づいて、車両の現状の走行状態を検知する(ステップSB−4)。
【0027】
つぎに、シフトバイワイヤECU28は、ステップSB−4での検知結果が「車両が後退している」というものであった場合(ステップSB−5:Yes)には、エンジントルクを発生させないようエンジン制御ECU22に指令を出す(ステップSB−6)。
【0028】
なお、シフトバイワイヤECU28は、ステップSB−4での検知結果が「車両が後退している」というものでなかった場合(ステップSB−5:No)には、上述したステップSB−1以降の処理を再び実行する。
【0029】
これにて、走行制御処理Aの説明を終了する。
【0030】
図2に戻り、一方、シフトバイワイヤECU28は、ステップSA−1での検知結果が「車両が前進している」というものでなく(ステップSA−2:No)、「車両が後退している」というものであった場合(ステップSA−4:Yes)には、後述する走行制御処理Bを実行する(ステップSA−5)。
【0031】
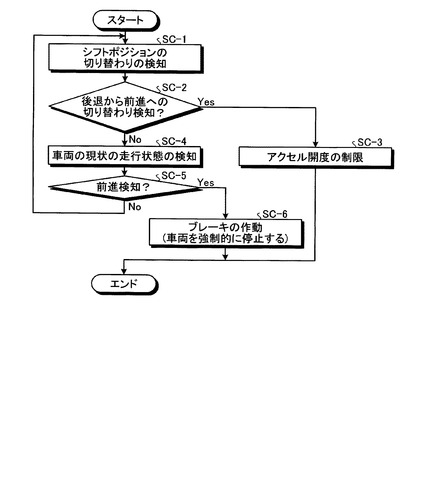
ここで、走行制御処理Bの一例を図4および図5を参照して説明する。図5は走行制御処理Bの一例を示すフローチャートである。
【0032】
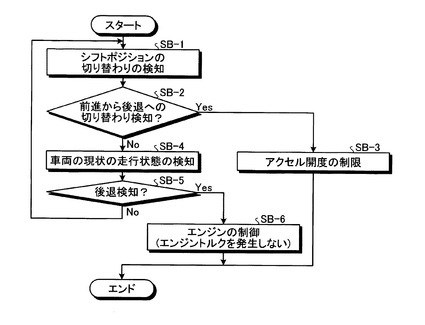
まず、シフトバイワイヤECU28は、シフトポジションセンサ20から送られてきたシフトポジションに関する情報に基づいて、シフトポジションの切り替わりがあったか否かを検知する(ステップSC−1)。
【0033】
つぎに、シフトバイワイヤECU28は、ステップSC−1での検知結果が「シフトポジションが後退から前進に切り替わった」というものであった場合(ステップSC−2:Yes)には、最初のアクセル開時またはシフトポジションの切り替わり後の最初のアクセル開時に所定のアクセル開度bでエンジントルクを一時的にクランプする(絞る)よう、エンジン制御ECU22に指令を出す(ステップSC−3)。なお、時間が経過するにつれて指数関数的にアクセル開度の最大値を高めていく制限方法(図4参照)で、エンジントルクを一時的に制限してもよい。
【0034】
図5に戻り、一方、シフトバイワイヤECU28は、ステップSC−1での検知結果が「シフトポジションが後退から前進に切り替わった」というものでなかった場合(ステップSC−2:No)には、周辺監視ECU14から送られてきたカメラ12で撮影した映像に関する情報および/または絶対車速検出センサ16から送られてきた車速に関する情報に基づいて、車両の現状の走行状態を検知する(ステップSC−4)。
【0035】
つぎに、シフトバイワイヤECU28は、ステップSC−4での検知結果が「車両が前進している」というものであった場合(ステップSC−5:Yes)には、ブレーキを作動するようブレーキ制御ECU26に指令を出す(ステップSC−6)。これにより、車両を強制的に停止させる。
【0036】
なお、シフトバイワイヤECU28は、ステップSC−4での検知結果が「車両が前進している」というものでなかった場合(ステップSC−5:No)には、上述したステップSC−1以降の処理を再び実行する。
【0037】
これにて、走行制御処理Bの説明を終了する。
【0038】
図2に戻り、一方、シフトバイワイヤECU28は、ステップSA−1での検知結果が「車両が後退している」というものでなかった場合(ステップSA−4:No)には、通常の発進時モードに切り替える(ステップSA−6)。
【0039】
[3.本実施の形態のまとめ及びその他の実施の形態]
以上、詳細に説明したように、本実施の形態によれば、シフトポジションが前進から後退に又は後退から前進に切り替わったことを検知した場合、最初のアクセル開時またはシフトポジションの切り替わり後の最初のアクセル開時にアクセル開度を一時的に制限してエンジントルクを一時的に絞ることにより、車両の走行を制御する。これにより、ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる。
【0040】
また、本実施の形態によれば、シフトポジションが前進から後退に切り替わったことを検知していない状態において、車両が後退走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御する。また、本実施の形態によれば、シフトポジションが後退から前進に切り替わったことを検知していない状態において、車両が前進走行していることを検知したときには、車両を強制的に停止させるべくブレーキを作動する。つまり、本実施の形態によれば、シフトポジションの切り替わりと実際の車両挙動とを分けて検出し、それぞれの検出結果に対し適切な加速制限処理を実行する。これにより、センサの故障や想定されないセンサの異常その他センサの誤作動が起こったとしても、ドライバの意図せぬ車両の走行(具体的には車両の逆走)を効果的に防ぐことができる。
【0041】
最後に、本発明にかかる走行制御装置は、本実施の形態以外にも、特許請求の範囲の書類に記載した技術的思想の範囲内において種々の異なる形態で実施されてよいものである。例えば、本実施の形態で説明した各処理のうち、自動的に行なわれるものとして説明した処理の全部または一部を手動的に行うこともでき、手動的に行なわれるものとして説明した処理の全部または一部を公知の方法で自動的に行うこともできる。また、本明細書中や図面中で示した処理手順・具体的名称・各種の情報については、特記する場合を除いて任意に変更することができる。また、ECUに関して、図示の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。また、ECUの分散・統合の具体的形態は図示のものに限られず、その全部または一部を、各種の付加等に応じて又は機能負荷に応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。
【産業上の利用可能性】
【0042】
以上のように、本発明にかかる走行制御装置は、特に自動車製造産業で好適に実施することができ、極めて有用である。
【図面の簡単な説明】
【0043】
【図1】シフトバイワイヤシステム1の構成の一例を示すブロック図である。
【図2】走行制御処理の一例を示すフローチャートである。
【図3】走行制御処理Aの一例を示すフローチャートである。
【図4】アクセル開度の制限方法の一例を示す図である。
【図5】走行制御処理Bの一例を示すフローチャートである。
【符号の説明】
【0044】
1 シフトバイワイヤシステム
10 シフトレバー
12 カメラ
14 周辺監視ECU
16 絶対車速検出センサ
18 シフト制御アクチュエータ
20 シフトポジションセンサ
22 エンジン制御ECU
24 駆動系制御ECU
26 ブレーキ制御ECU
28 シフトバイワイヤECU
【技術分野】
【0001】
本発明は、シフトバイワイヤシステムを搭載した車両の走行を制御する走行制御装置に関するものである。
【背景技術】
【0002】
各種のセンサやECU(電子制御ユニット)などで構成されている現状のシフトバイワイヤシステムでは、シフトレバー信号とミッションにおける実際のシフトポジションとの比較ならびにシフトポジションを検知する手段の冗長化およびECUの冗長化などによって、シフトに関し何らかの矛盾があった場合には車両の走行を制限するなどの構成をとることで、ドライバの意図せぬ車両の走行に対し制限を設けている。
【0003】
ここで、特許文献1には、シフト信号とシフト位置が不一致のときはエンジンの出力を低下させる制御を行うことでドライバの意図せぬ急発進を防止する技術が開示されている。特許文献2には、シフト切り替え時に電子ブレーキを掛けることで、シフト切り替えを中断した時の不意の急発進を防止する技術が開示されている。特許文献3には、一般の自動変速システムにおいてニュートラルからの変速時にクラッチを係合することで急発進を防止する技術が開示されている。特許文献4には、シフトを前進からニュートラルに切り替えるときや後進からニュートラルに切り替えるときはシフトがニュートラルになるまでシフトの動作を禁止する技術が開示されている。
【0004】
【特許文献1】特開平5−272633号公報
【特許文献2】特開2005−127469号公報
【特許文献3】特開2002−195314号公報
【特許文献4】特許第3948369号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、シフトポジションセンサからの入力信号を前提として制御する現状のシステムでは、当該センサの操作系も含めた当該システムの構造上、当該センサからの入力信号を正として、ドライバの意図する又は走行上安全なシフトポジションを制御することしかできない。よって、ドライバの意図せぬ車両の走行が当該ドライバの誤操作(操作ミス)に因るものであった場合には、現状のシステムでは当該誤操作は異常として認識されない。そのため、このような人為的な操作ミスに因るドライバの意図せぬ車両の走行を現状のシステムで防ぐことは困難であるという問題点があった。
【0006】
本発明は、上記問題点に鑑みてなされたものであって、ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明にかかる走行制御装置は、シフトバイワイヤシステムを搭載した車両の走行を制御する走行制御装置であって、シフトポジションの前進および後進間の切り替わりを検知する切替検知手段と、前記切替検知手段で前記シフトポジションが切り替わったことを検知した場合、アクセル開度を制限することにより前記車両の走行を制御する走行制御手段とを備えたことを特徴とする。
【0008】
また、本発明にかかる走行制御装置は、前記に記載の走行制御装置において、前記車両が走行していることを検知する走行検知手段をさらに備え、前記走行制御手段は、前記切替検知手段で前記シフトポジションが前進から後進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、前記切替検知手段で前記シフトポジションが後進から前進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が前進走行していることを検知したときには、ブレーキを作動することを特徴とする。
【発明の効果】
【0009】
本発明によれば、シフトポジションが切り替わったことを検知した場合、アクセル開度を制限することにより車両の走行を制御する。これにより、ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができるという効果を奏する。
【0010】
また、本発明によれば、シフトポジションが前進から後進に切り替わったことを検知していない状態において、車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、シフトポジションが後進から前進に切り替わったことを検知していない状態において、車両が前進走行していることを検知したときには、ブレーキを作動する。これにより、センサの故障や想定されないセンサの異常その他センサの誤作動が起こったとしても、ドライバの意図せぬ車両の走行(具体的には車両の逆走)を効果的に防ぐことができるという効果を奏する。
【0011】
ここで、従来技術によれば、現状のシステムでセンサの異常を確定するには2重系センサの各々の公差やノイズなどの影響を排除するため、現状のシステムでは当該異常を確定するのにある程度の時間が必要となる。そのため、当該異常を確定するまでの間は、当該異常に因る車両の逆走を防ぐことは困難である。すなわち、現状のシステムでは、センサの故障や想定されないセンサの異常その他センサの誤作動に因る車両の逆走を完全に防ぐことは困難である。そこで、本発明によれば、シフトポジションが前進から後進に切り替わったことを検知していない状態において、車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、シフトポジションが後進から前進に切り替わったことを検知していない状態において、車両が前進走行していることを検知したときには、ブレーキを作動することにより、センサの故障や想定されないセンサの異常その他センサの誤作動が起こったとしても、ドライバの意図せぬ車両の走行(具体的には車両の逆走)を効果的に防ぐことができる。
【発明を実施するための最良の形態】
【0012】
以下に、本発明にかかる走行制御装置の実施の形態を図面に基づいて詳細に説明する。なお、本実施の形態により本発明が限定されるものではない。
【0013】
[1.本実施の形態の構成]
本実施の形態にかかる走行制御装置を含むシフトバイワイヤシステム1の構成について、図1を参照して説明する。図1はシフトバイワイヤシステム1の構成の一例を示すブロック図である。
【0014】
シフトバイワイヤシステム1は、シフトレバー10と、シフト制御と独立して実際の車両の挙動(走り出す方向)を検知する手段としてのカメラ12、周辺監視ECU14および絶対車速検出センサ16と、シフト制御アクチュエータ18と、シフトポジションセンサ20と、ECUの指示するシフトポジションに関わらず車両の走行を制御する手段としてのエンジン制御ECU22、駆動系制御ECU24およびブレーキ制御ECU26と、シフトバイワイヤECU28と、を含んで構成される。シフトバイワイヤシステム1は、シフトポジションを、シフトバイワイヤECU28からの指令により切り替えるシステムである。
【0015】
シフトレバー10は、シフトポジションを切り替える(変速機のギアの組み合わせを変える)ためにドライバが操作する部材である。シフトレバー10はシフトバイワイヤECU28に接続されている。
【0016】
カメラ12、周辺監視ECU14および絶対車速検出センサ16は、本発明における走行検知手段に含まれるものである。カメラ12は撮影機である。カメラ12は周辺監視ECU14に接続されている。周辺監視ECU14は、カメラ12を制御して車両周辺を監視することで当該車両の挙動を検知する電子制御ユニットである。絶対車速検出センサ16は、車両の絶対車速を検出するセンサであって車両が前進又は後進しているか否かを判定できるものである。周辺監視ECU14および絶対車速検出センサ16はシフトバイワイヤECU28に接続されている。
【0017】
シフト制御アクチュエータ18は、シフトバイワイヤECU28から送られてきたシフトポジションに関する指令に基づいて、変速機のギアの組み合わせを切り替える作動装置である。シフトポジションセンサ20は、本発明における切替検知手段に相当するものであり、変速機のギアの組み合わせの状態からシフトポジションを検知するセンサである。シフト制御アクチュエータ18およびシフトポジションセンサ20はシフトバイワイヤECU28に接続されている。
【0018】
エンジン制御ECU22は、エンジンを制御する電子制御ユニットである。駆動系制御ECU24は、車両の駆動系を制御する電子制御ユニットである。ブレーキ制御ECU26は、ブレーキを制御する電子制御ユニットである。エンジン制御ECU22、駆動系制御ECU24およびブレーキ制御ECU26はシフトバイワイヤECU28に接続されている。
【0019】
シフトバイワイヤECU28は走行制御手段に相当するものである。シフトバイワイヤECU28は、ドライバによりシフトレバー10が操作されると、当該シフトレバー10の位置に対応するシフトポジションに切り替えるようシフト制御アクチュエータ18に指令を出すことにより、当該シフト制御アクチュエータ18にシフトポジションを切り替えさせる。シフトバイワイヤECU28は、周辺監視ECU14、絶対車速検出センサ16およびシフトポジションセンサ20から送られてきた情報を総合的に判断して、エンジン制御ECU22、駆動系制御ECU24およびブレーキ制御ECU26を適宜制御することにより、車両の走行を制御(制限)する。
【0020】
[2.本実施の形態の処理]
上述した構成のシフトバイワイヤシステム1で行われる走行制御処理の一例を、図2から図5を参照して説明する。図2は走行制御処理の一例を示すフローチャートである。
【0021】
まず、シフトバイワイヤECU28は、周辺監視ECU14から送られてきたカメラ12で撮影した映像に関する情報および/または絶対車速検出センサ16から送られてきた車速に関する情報に基づいて、車両の現状の走行状態を検知する(ステップSA−1)。
【0022】
つぎに、シフトバイワイヤECU28は、ステップSA−1での検知結果が「車両が前進している」というものであった場合(ステップSA−2:Yes)には、後述する走行制御処理Aを実行する(ステップSA−3)。
【0023】
ここで、走行制御処理Aの一例を図3および図4を参照して説明する。図3は走行制御処理Aの一例を示すフローチャートである。図4はアクセル開度の制限方法の一例を示す図である。
【0024】
まず、シフトバイワイヤECU28は、シフトポジションセンサ20から送られてきたシフトポジションに関する情報に基づいて、シフトポジションの切り替わりがあったか否かを検知する(ステップSB−1)。
【0025】
つぎに、シフトバイワイヤECU28は、ステップSB−1での検知結果が「シフトポジションが前進から後退に切り替わった」というものであった場合(ステップSB−2:Yes)には、最初のアクセル開時またはシフトポジションの切り替わり後の最初のアクセル開時に所定のアクセル開度aでエンジントルクを一時的にクランプする(絞る)よう、エンジン制御ECU22に指令を出す(ステップSB−3)。なお、時間が経過するにつれて指数関数的にアクセル開度の最大値を高めていく制限方法(図4参照)で、エンジントルクを一時的に制限してもよい。
【0026】
図3に戻り、一方、シフトバイワイヤECU28は、ステップSB−1での検知結果が「シフトポジションが前進から後退に切り替わった」というものでなかった場合(ステップSB−2:No)には、周辺監視ECU14から送られてきたカメラ12で撮影した映像に関する情報および/または絶対車速検出センサ16から送られてきた車速に関する情報に基づいて、車両の現状の走行状態を検知する(ステップSB−4)。
【0027】
つぎに、シフトバイワイヤECU28は、ステップSB−4での検知結果が「車両が後退している」というものであった場合(ステップSB−5:Yes)には、エンジントルクを発生させないようエンジン制御ECU22に指令を出す(ステップSB−6)。
【0028】
なお、シフトバイワイヤECU28は、ステップSB−4での検知結果が「車両が後退している」というものでなかった場合(ステップSB−5:No)には、上述したステップSB−1以降の処理を再び実行する。
【0029】
これにて、走行制御処理Aの説明を終了する。
【0030】
図2に戻り、一方、シフトバイワイヤECU28は、ステップSA−1での検知結果が「車両が前進している」というものでなく(ステップSA−2:No)、「車両が後退している」というものであった場合(ステップSA−4:Yes)には、後述する走行制御処理Bを実行する(ステップSA−5)。
【0031】
ここで、走行制御処理Bの一例を図4および図5を参照して説明する。図5は走行制御処理Bの一例を示すフローチャートである。
【0032】
まず、シフトバイワイヤECU28は、シフトポジションセンサ20から送られてきたシフトポジションに関する情報に基づいて、シフトポジションの切り替わりがあったか否かを検知する(ステップSC−1)。
【0033】
つぎに、シフトバイワイヤECU28は、ステップSC−1での検知結果が「シフトポジションが後退から前進に切り替わった」というものであった場合(ステップSC−2:Yes)には、最初のアクセル開時またはシフトポジションの切り替わり後の最初のアクセル開時に所定のアクセル開度bでエンジントルクを一時的にクランプする(絞る)よう、エンジン制御ECU22に指令を出す(ステップSC−3)。なお、時間が経過するにつれて指数関数的にアクセル開度の最大値を高めていく制限方法(図4参照)で、エンジントルクを一時的に制限してもよい。
【0034】
図5に戻り、一方、シフトバイワイヤECU28は、ステップSC−1での検知結果が「シフトポジションが後退から前進に切り替わった」というものでなかった場合(ステップSC−2:No)には、周辺監視ECU14から送られてきたカメラ12で撮影した映像に関する情報および/または絶対車速検出センサ16から送られてきた車速に関する情報に基づいて、車両の現状の走行状態を検知する(ステップSC−4)。
【0035】
つぎに、シフトバイワイヤECU28は、ステップSC−4での検知結果が「車両が前進している」というものであった場合(ステップSC−5:Yes)には、ブレーキを作動するようブレーキ制御ECU26に指令を出す(ステップSC−6)。これにより、車両を強制的に停止させる。
【0036】
なお、シフトバイワイヤECU28は、ステップSC−4での検知結果が「車両が前進している」というものでなかった場合(ステップSC−5:No)には、上述したステップSC−1以降の処理を再び実行する。
【0037】
これにて、走行制御処理Bの説明を終了する。
【0038】
図2に戻り、一方、シフトバイワイヤECU28は、ステップSA−1での検知結果が「車両が後退している」というものでなかった場合(ステップSA−4:No)には、通常の発進時モードに切り替える(ステップSA−6)。
【0039】
[3.本実施の形態のまとめ及びその他の実施の形態]
以上、詳細に説明したように、本実施の形態によれば、シフトポジションが前進から後退に又は後退から前進に切り替わったことを検知した場合、最初のアクセル開時またはシフトポジションの切り替わり後の最初のアクセル開時にアクセル開度を一時的に制限してエンジントルクを一時的に絞ることにより、車両の走行を制御する。これにより、ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる。
【0040】
また、本実施の形態によれば、シフトポジションが前進から後退に切り替わったことを検知していない状態において、車両が後退走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御する。また、本実施の形態によれば、シフトポジションが後退から前進に切り替わったことを検知していない状態において、車両が前進走行していることを検知したときには、車両を強制的に停止させるべくブレーキを作動する。つまり、本実施の形態によれば、シフトポジションの切り替わりと実際の車両挙動とを分けて検出し、それぞれの検出結果に対し適切な加速制限処理を実行する。これにより、センサの故障や想定されないセンサの異常その他センサの誤作動が起こったとしても、ドライバの意図せぬ車両の走行(具体的には車両の逆走)を効果的に防ぐことができる。
【0041】
最後に、本発明にかかる走行制御装置は、本実施の形態以外にも、特許請求の範囲の書類に記載した技術的思想の範囲内において種々の異なる形態で実施されてよいものである。例えば、本実施の形態で説明した各処理のうち、自動的に行なわれるものとして説明した処理の全部または一部を手動的に行うこともでき、手動的に行なわれるものとして説明した処理の全部または一部を公知の方法で自動的に行うこともできる。また、本明細書中や図面中で示した処理手順・具体的名称・各種の情報については、特記する場合を除いて任意に変更することができる。また、ECUに関して、図示の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。また、ECUの分散・統合の具体的形態は図示のものに限られず、その全部または一部を、各種の付加等に応じて又は機能負荷に応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。
【産業上の利用可能性】
【0042】
以上のように、本発明にかかる走行制御装置は、特に自動車製造産業で好適に実施することができ、極めて有用である。
【図面の簡単な説明】
【0043】
【図1】シフトバイワイヤシステム1の構成の一例を示すブロック図である。
【図2】走行制御処理の一例を示すフローチャートである。
【図3】走行制御処理Aの一例を示すフローチャートである。
【図4】アクセル開度の制限方法の一例を示す図である。
【図5】走行制御処理Bの一例を示すフローチャートである。
【符号の説明】
【0044】
1 シフトバイワイヤシステム
10 シフトレバー
12 カメラ
14 周辺監視ECU
16 絶対車速検出センサ
18 シフト制御アクチュエータ
20 シフトポジションセンサ
22 エンジン制御ECU
24 駆動系制御ECU
26 ブレーキ制御ECU
28 シフトバイワイヤECU
【特許請求の範囲】
【請求項1】
シフトバイワイヤシステムを搭載した車両の走行を制御する走行制御装置であって、
シフトポジションの前進および後進間の切り替わりを検知する切替検知手段と、
前記切替検知手段で前記シフトポジションが切り替わったことを検知した場合、アクセル開度を制限することにより前記車両の走行を制御する走行制御手段と
を備えたことを特徴とする走行制御装置。
【請求項2】
前記車両が走行していることを検知する走行検知手段
をさらに備え、
前記走行制御手段は、
前記切替検知手段で前記シフトポジションが前進から後進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、
前記切替検知手段で前記シフトポジションが後進から前進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が前進走行していることを検知したときには、ブレーキを作動すること
を特徴とする請求項1に記載の走行制御装置。
【請求項1】
シフトバイワイヤシステムを搭載した車両の走行を制御する走行制御装置であって、
シフトポジションの前進および後進間の切り替わりを検知する切替検知手段と、
前記切替検知手段で前記シフトポジションが切り替わったことを検知した場合、アクセル開度を制限することにより前記車両の走行を制御する走行制御手段と
を備えたことを特徴とする走行制御装置。
【請求項2】
前記車両が走行していることを検知する走行検知手段
をさらに備え、
前記走行制御手段は、
前記切替検知手段で前記シフトポジションが前進から後進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が後進走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御し、
前記切替検知手段で前記シフトポジションが後進から前進に切り替わったことを検知していない状態において、前記走行検知手段で前記車両が前進走行していることを検知したときには、ブレーキを作動すること
を特徴とする請求項1に記載の走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−264128(P2009−264128A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−111242(P2008−111242)
【出願日】平成20年4月22日(2008.4.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月22日(2008.4.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]