
走行制御装置

【課題】バッテリのSOCの状態を考慮して燃費低下を回避する走行制御を行うことができる走行制御装置を提供する。
【解決手段】エンジン42及びモータ43を有し、モータ43を発電機として作動させ回生制御によりバッテリ44を充電可能に構成された車両の走行制御装置であって、所定地点までの行程を複数の区間に分割して各区間での目標速度パターンを生成する目標速度パターン生成部10と、バッテリ44のSOCが第1の所定値以下の場合には、目標速度パターンに基づいて加速する加速区間において目標速度パターンに規定される加速よりも大きな加速を行い、目標速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターンを再生成する目標速度パターン再生成部11と、を備えることにより、SOC不足状態に起因した動作により燃費が低下することを回避することが可能となる。
【解決手段】エンジン42及びモータ43を有し、モータ43を発電機として作動させ回生制御によりバッテリ44を充電可能に構成された車両の走行制御装置であって、所定地点までの行程を複数の区間に分割して各区間での目標速度パターンを生成する目標速度パターン生成部10と、バッテリ44のSOCが第1の所定値以下の場合には、目標速度パターンに基づいて加速する加速区間において目標速度パターンに規定される加速よりも大きな加速を行い、目標速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターンを再生成する目標速度パターン再生成部11と、を備えることにより、SOC不足状態に起因した動作により燃費が低下することを回避することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行を制御する走行制御装置に関するものである。
【背景技術】
【0002】
従来、車両の走行を制御する装置として、燃費が向上するように車両の走行を制御するものが知られている(例えば、特許文献1参照)。特許文献1の装置は、エンジンとモータを駆動源とするハイブリット車両において、車両を目標速度に維持しながら燃費向上を図るものである。具体的には、目標速度より大きい上限速度、及び目標速度より小さい下限速度を設定し、設定した上限速度までエンジンで加速させたのちにエンジンを停止させて走行させ(惰性走行)、車速が下限速度に到達した後、エンジンを始動させて上限速度まで加速させる走行を行うものである。このように、特許文献1の装置は目標速度を基準として加速と減速とを繰り返す速度制御を実行するものである。
【特許文献1】特開2007−187090号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、ハイブリット車両の駆動源の一つであるモータはバッテリを電源としている。一般的にバッテリの充電量(SOC:State Of Charge)には目標値があり、この目標値を基準に充電するか否かを判定している。このため、従来の走行制御装置にあっては、惰性走行をする予定の区間であっても、例えば、バッテリのSOCが不足しているためにエンジンを作動させなければならない場合がある。また、回生制御をしながら走行する予定の区間であっても、バッテリが満充電状態であるため充電できない場合がある。このように、従来の走行制御装置は、バッテリのSOCの状態によっては予定通りの低燃費走行が行えず、燃費向上が妨げられるおそれがある。
【0004】
そこで、本発明はこのような技術課題を解決するためになされたものであって、バッテリのSOCの状態を考慮して燃費低下を回避する走行制御を行うことができる走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
すなわち本発明に係る走行制御装置は、エンジン及びモータを有し、モータを発電機として作動させ回生制御によりバッテリを充電可能に構成された車両の走行制御装置であって、所定地点までの行程を複数の区間に分割して各区間での目標速度パターンを生成する目標速度パターン生成手段と、バッテリのSOCが第1の所定値以下の場合には、目標速度パターンに基づいて加速する加速区間において目標速度パターンに規定される加速よりも大きな加速を行い、目標速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターンを再生成する目標速度パターン再生成手段とを備えて構成される。
【0006】
この発明では、所定の速度パターンを生成後、バッテリのSOCが第1の所定値以下となる場合には、加速区間の加速を大きくするように速度パターンを再生成する。加速区間において増加した加速により車速を上昇させて加速区間の運動エネルギーを大きくすることができる。このように、バッテリのSOCの不足を補うために必要な運動エネルギーの生成タイミングを制御することで、例えばエンジン停止による惰性走行をする予定の走行区間において充電のためにエンジンを駆動しなければならない事態が発生することを回避することができる。このため、バッテリのSOCが不足していても予定通りの走行を行うことができるので、SOC不足状態に起因した動作により燃費が低下することを回避することが可能となる。また、この発明では、減速の際に回生制御による減速を行うように速度パターンを再生成する。このようにバッテリの充電タイミングを制御することで、加速中に充電する場合、すなわち力学エネルギー発生と同時に電気エネルギーに変換する場合に比べて所定地点までの平均速度を大きくすることができる。このため、全体の旅行時間を短縮することが可能となる。これにより、例えば、短縮した分の旅行時間を燃費優先の惰性走行や低速走行に割り当てることができるため、決められた到着時刻に間に合いつつ燃費向上を図ることが可能となる。
【0007】
ここで、モータは、バッテリから供給される電力により駆動源として機能し、目標速度パターン再生成手段は、バッテリのSOCが第1の所定値よりも大きい第2の所定値以上の場合には、減速区間においてモータを駆動させて放電を行う目標速度パターンを再生成することが好適である。
【0008】
このように構成することで、バッテリが満充電状態となることを回避するためにバッテリのSOCをモータ駆動による放電により減少させる場合には、減速区間を走行する際に行わせることができる。これにより、例えば、加速と減速とを繰り返す低燃費な目標速度パターンをモータの駆動力によってなだらかな目標速度パターンとすることができる。このように、放電タイミングを制御することで、回生制御により得られる電気エネルギーをバッテリに無駄なく充電することができるとともに、乗り心地を向上することが可能となる。
【0009】
また、目標速度パターン再生成手段は、バッテリのSOCが第1の所定値よりも大きい第2の所定値以上の場合には、モータを駆動源として駆動させるための放電を、後続車両の存在しない区間よりも後続車両の存在する区間で優先させる目標速度パターンを再生成することが好適である。
【0010】
このように構成することで、モータ駆動による放電によってバッテリのSOCを減少させる場合には、後続車両が存在する区間で優先的にモータを駆動させるため、後続車両の走行に影響を与えやすい低速走行や波状走行をモータの駆動力によって定速走行に近づけることができる。よって、低燃費走行を実行しつつ交通流の妨げになることを回避することができる。
【0011】
さらに、目標速度パターンにより規定された各区間での目標速度に基づいた走行制御を行う際に、エンジンの動作状態情報、車速と目標速度との差を示す速度超過不足情報、及び、バッテリのSOCと目標SOCとの差を示すSOC過不足情報の何れか一つに基づいてフィードバック制御を行う走行制御手段を備えることが好適である。
【0012】
このように構成することで、生成あるいは再生成した目標速度パターンにより規定される目標速度に対してフィードバック制御を行う場合に、燃費効率の良い実行を行うことができる。
【発明の効果】
【0013】
本発明によれば、バッテリのSOCの状態を考慮して燃費低下を回避する走行制御を行うことができる。
【発明を実施するための最良の形態】
【0014】
以下、添付図面を参照して本発明の実施形態について説明する。なお、各図において同一又は相当部分には同一の符号を付し、重複する説明を省略する。
【0015】
(第1実施形態)
第1実施形態に係る走行制御装置は、バッテリを回生制御により充電可能に構成された車両の走行制御装置であって、例えば、自動運転機能を備えた車両や、追従運転や車線維持運転などの運転者支援システムを搭載した車両に好適に採用されるものである。
【0016】
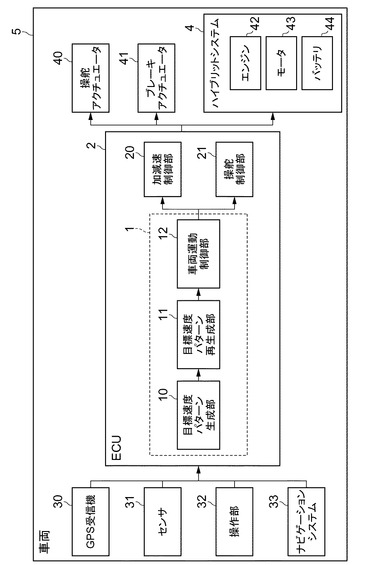
最初に、本実施形態に係る走行制御装置(走行制御部)の構成を説明する。図1は本発明の実施形態に係る走行制御部を備えた車両の構成を示すブロック図である。図1に示す車両5は、自動運転機能を有する車両であって、エンジン42、モータ43及びバッテリ44を含むハイブリットシステム4を備えている。
【0017】
ハイブリットシステム4は、エンジン42及びモータ43の2つの駆動源を、単独であるいは組み合わせて駆動させることにより車両5を走行させる機能を有している。すなわち、ハイブリットシステム4は、エンジン42を停止したままの惰性による走行、いわゆる滑空走行が可能に構成されている。エンジン42は、例えば電子スロットル等のスロットルアクチュエータで出力が制御可能に構成されている。モータ43は、接続されたバッテリ44から供給される電力、あるいは発電機(不図示)を介して供給される電力により駆動する機能を有している。また、ハイブリットシステム4は、回生ブレーキあるいは発電機により、モータ43を回転させて運動エネルギーを電気エネルギーに変換する回生制御を行う機能を有している。すなわち、モータ43は発電機としても機能する。そして、ハイブリットシステム4は、得られた電気エネルギーをバッテリ44に充電する機能を有している。また、ハイブリットシステム4は、後述するECU(Electronic Control Unit)2に接続され、ECU2から出力される信号に基づいて駆動制御、回生制御を行う機能を有している。
【0018】
また、車両5は、GPS(Global Positioning System)受信機30、センサ31、操作部32、ナビゲーションシステム33、ECU2、操舵アクチュエータ40、ブレーキアクチュエータ41を備えている。ここで、GPSは、衛星を用いた計測システムのことであり、自車両の現在位置の把握に好適に用いられるものである。また、ECUは、電子制御する自動車デバイスのコンピュータであり、CPU(Central Processing Unit)、ROM(Read Only Memory)やRAM(Random Access Memory)等のメモリ、及び入出力インターフェイスなどを備えて構成されている。
【0019】
GPS受信機30は、例えば、車両5の位置情報を受信する機能を有している。また、GPS受信機30は、受信した位置情報をECU2へ出力する機能を有している。
【0020】
センサ31は、車両5の周囲の走行環境情報や、車両5の車両状態情報を取得する機能を有している。センサ31としては、例えば、車両5の走行レーンを認識するためのレーン認識センサや画像センサ、車両5の周辺の障害物や後続車両を検知し距離情報を取得する電磁波センサやミリ波センサ、ヨーレートを計測するヨーレートセンサ、バッテリ44のSOCを検出するセンサ、ハンドル舵角及びタイヤ角を検知する舵角センサ、加速度を検出する加速度センサ、車輪速を計測する車輪速センサ等が用いられる。また、センサ31は、取得した情報をECU2へ出力する機能を有している。
【0021】
操作部32は、運転者の要求する条件を入力する機能を有している。操作部32としては、例えば、目標地点、目標旅行時間、乗り心地レベル等を入力する操作パネル等が用いられる。また、操作部32は、入力した情報をECU2へ出力する機能を有している。
【0022】
ナビゲーションシステム33は、所定地点(例えば目的地)までの経路案内等を行う機能を有している。また、ナビゲーションシステム33は、例えば地図データベースから現在走行中付近の道路情報を読み出し、その道路情報をナビ信号としてECU2へ出力する機能を有している。さらに、ナビゲーションシステム33は、信号機点灯情報等の交通情報をナビ信号としてECU2へ出力する機能を有している。
【0023】
ECU2は、目標速度パターン生成部(目標速度パターン生成手段)10、目標速度パターン再生成部(目標速度パターン再生成手段)11、車両運動制御部12、加減速制御部20及び操舵制御部21を備えており、目標速度パターン生成部10、目標速度パターン再生成部11及び車両運動制御部12により走行制御部1が構成されている。
【0024】
目標速度パターン生成部10は、車両5の目標速度パターンを生成する機能を有している。目標速度パターンは、例えば、時刻又は距離に依存した速度を示すものである。目標速度パターン生成部10は、所定地点までの行程を複数の区間に分割して各区間での目標速度パターン(初期速度パターン)を生成する機能を有している。例えば、目標速度パターン生成部10は、操作部32が出力した目的地と、ナビゲーションシステム33が出力した地図情報等に基づいて、目的地までの行程を複数の区間に分割する機能を有している。そして、目標速度パターン生成部10は、例えば、センサ31が入力した車両5の周囲の走行環境情報及びECU2のメモリに格納された車両情報に基づいて、分割した区間ごとに初期速度パターンを生成する機能を有している。例えば、目標速度パターン生成部10は、車両の走行において必ず満たさなければならない条件である拘束条件と、重視する項目を評価するための項を含む評価関数とを用いた最適化処理により、速度パターンを生成する機能を有している。重視する項目が燃費の場合、例えばエンジン42の熱効率を評価する項を評価関数に含むことによって、低燃費な初期速度パターンを生成することができる。この低燃費な初期速度パターンは、エンジン42の熱効率の評価により、例えば20km/h程度の低速な速度パターンや、加速する区間と減速する区間を繰り返す波状の速度パターンとなる。なお、加速区間においてはエンジン42の熱効率が最も良い条件で生成され、減速区間においてはエンジン42を停止した走行、いわゆる滑空走行となる。また、目標速度パターン生成部10は、生成した初期速度パターンを目標速度パターン再生成部11へ出力する機能を有している。
【0025】
目標速度パターン再生成部11は、目標速度パターン生成部10が生成した初期速度パターンを再生成する機能を有している。例えば、バッテリ44のSOCが不足基準値(第1の所定値)以下の場合には、初期速度パターンに基づいて加速する加速区間において初期速度パターンに規定される加速よりも大きな加速を行い、初期速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターン(充電速度パターン)を再生成する機能を有している。ここで、不足基準値は、例えばバッテリ44のSOC目標値から許容される不足量を減算した値が設定される。不足基準値として、SOCを全体容量に対する割合で表示した場合、例えば50%〜40%が用いられる。なお、以下では、SOCは全体容量に対する割合で表示するものとする。また、増分する加速量は、ハイブリットシステム4の通常のHV制御により決定される。さらに、目標速度パターン再生成部11は、再生成した速度パターンを車両運動制御部12へ出力する機能を有している。
【0026】
車両運動制御部12は、目標速度パターン及びセンサ31からの周囲の走行環境や自車両の走行状態に基づいて、操舵制御情報や加減速制御情報を算出する機能を有している。車両運動制御部12は、初期速度パターンと充電速度パターンのうち、ECU2によって選択された速度パターンを用いて制御情報を生成する機能を有している。速度パターンの選択は、例えば、ナビゲーションシステム33により出力された交通情報に基づいてECU2により行われる。また、車両運動制御部12は、算出した操舵制御情報を操舵制御部21へ、算出した加減速制御情報を加減速制御部20へ出力する機能を有している。さらに、車両運動制御部12は、モータ43を駆動あるいは発電機として作動させてバッテリ44の放電や充電を行うタイミング情報をハイブリットシステム4へ出力する機能を有している。例えば、車両運動制御部12は、充電速度パターンの減速区間において回生ブレーキを作動させる命令信号をハイブリットシステム4に出力する機能を有している。
【0027】
加減速制御部20は、車両運動制御部12が出力した加減速制御情報に基づいて、ハイブリットシステム4や、ブレーキアクチュエータ41を制御するための信号を生成し、生成した制御信号をハイブリットシステム4及びブレーキアクチュエータ41へ出力する機能を有している。ここで、ブレーキアクチュエータ41は、例えば油圧式ブレーキの場合には、各車輪のブレーキ油圧の調整を行うバルブ等が用いられる。
【0028】
操舵制御部21は、車両運動制御部12が出力した操舵制御情報に基づいて操舵アクチュエータ40を制御するための信号を生成し、生成した制御信号を操舵アクチュエータ40へ出力する機能を有している。なお、操舵アクチュエータ40は、車両の走行を制御する機械的な構成要素であり、例えば、操舵角制御モータ等が用いられる。
【0029】
次に、第1実施形態に係る走行制御部1の動作について説明する。図2,3は、第1実施形態に係る走行制御部1の動作を示すフローチャートである。図2,3に示す制御処理は、例えばイグニッションオン又は車両5に備わる開始ボタンがオンされてから、所定のタイミングで繰り返し実行される。
【0030】
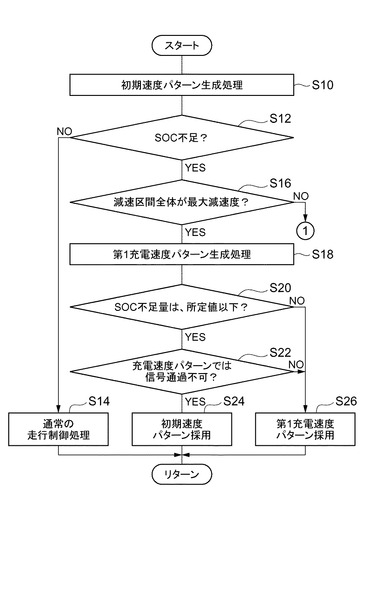
図2に示すように、走行制御部1は初期速度パターン生成処理から開始する(S10)。S10の処理は、目標速度パターン生成部10が実行し、初期速度パターンを生成する処理である。目標速度パターン生成部10は、例えば、操作部32により取得した目的地と、ナビゲーションシステム33が出力した地図情報等に基づいて、目的地までの行程を複数の区間に分割する。そして、例えば、重視する項目を評価する項を含む評価関数を用いて最適化処理により初期速度パターンを生成する。以下では説明理解の容易性を考慮して、低燃費速度パターンを生成する例を説明する。目標速度パターン生成部10は、例えば、ECU2のメモリに格納された車両情報を入力して拘束条件を設定する。車両情報として、例えば、車両加速性能、車両減速性能、車重、許容最大加速度、許容最大減速度、許容最大ジャーク、最高速度、最大横加速度、最大ハンドル角速度、最小定常速度、最小定常加速度、最小定常ジャーク、加減速時の加減速変化回数、緊急ブレーキ性能、故障判定時間、速度制御誤差、位置制御誤差が用いられる。これらの値は、諸元情報や、操作部32から入力された運転者の要望、学習等により設定される。
【0031】
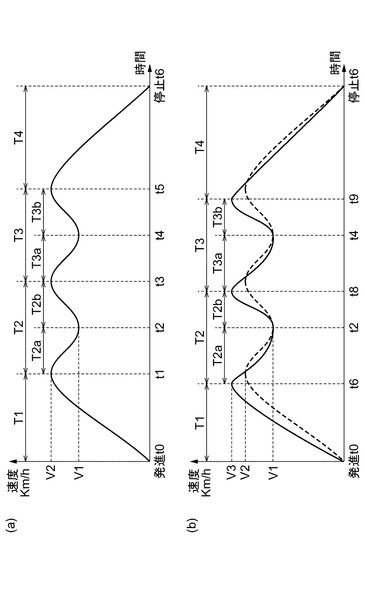
次に、旅行時間とエンジン出力熱効率を評価する項を含む評価関数とを用いた最適化処理により、低燃費な初期速度パターンを生成する。生成された初期速度パターンの一例を図4(a)に示す。図4に示すグラフは、横軸が時間、縦軸が速度で示された速度パターンである。図4(a)に示す速度パターンは、車両5が発進して停止するまで、例えば青点灯による発進時刻t0から赤点灯による停止時刻t6までの短い時間の速度パターンである。このような速度パターンを繋げることによって目的地までの速度パターンが完成する。図4(a)では、時刻t0から時刻t1までの加速区間T1、時刻t1から時刻t3までの波状走行区間T2、時刻t3から時刻t5までの波状走行区間T3、時刻t5から時刻t6まで減速区間T4の4つの区間に分割して低燃費な速度パターンを生成している。波状走行区間T2、T3内には減速区間T2a、T3aと加速区間T2b、T3bが含まれており、波状走行区間が連続することにより、減速区間と加速区間が交互に繰り返されている。減速区間T2a、T3a、T4での走行は、いわゆる滑空走行であり、エンジン42は停止している。目標速度パターン生成部10が速度パターンを生成すると、S10の処理は終了し、SOC確認処理へ移行する(S12)。
【0032】
S12の処理は、目標速度パターン再生成部11が実行し、バッテリ44のSOCが不足しているか否かを判定する処理である。目標速度パターン再生成部11は、例えば、センサ31から入力したSOCが不足基準値以下であるかを判定する。不足基準値として例えば40%が用いられる。S12の処理において、SOCが不足していないと判定した場合には、通常走行制御処理へ移行する(S14)。
【0033】
S14の処理は、ECU2が実行し、通常の速度制御処理を行う処理である。通常の速度制御処理は、バッテリ44のSOCを考慮せずに、操舵制御及び加減速制御を行う処理である。例えば低燃費走行をする場合には、燃費に最も良い車速や加速度等を演算して制御する。また、S10の処理で設定した初期速度パターンを採用して走行してもよい。S14の処理が終了すると、図2,3に示す制御処理は終了する。
【0034】
一方、S12の処理において、SOCが不足していると判定した場合には、フル回生状態判定処理へ移行する(S16)。S16の処理は、ハイブリットシステム4が実行し、フル回生状態であるか否かを判定する処理である。目標速度パターン再生成部11は、例えば図4(a)に示す初期速度パターンの減速区間T2a、T3a、T4において、ハイブリットシステム4によりその速度で許容されている最大の減速度で減速するか否かを判定することで、フル回生状態であるか否かを判定する。この最大の減速度は、バッテリ44の入力密度限界となる回生、すなわちフル回生が行われる減速度であり、例えば−0.2Gが用いられる。S16の処理において、フル回生状態であると判定した場合には、第1充電速度パターン生成処理へ移行する(S18)。
【0035】
S18の処理は、目標速度パターン再生成部11が実行し、目標速度パターンを再生成する処理である。目標速度パターン再生成部11は、初期速度パターンの加速区間T1、T2b、T3bにおいてエンジン42の出力を増加し、初期速度パターンの減速区間T2a、T3a、T4において滑空走行でなく回生制御による減速を行うように速度パターン(第1充電速度パターン)を再生成する。エンジン42の出力の増加量は、ハイブリットシステム4の通常のHV制御により決定され、例えばSOCが基準値となるように設定される。生成した第1充電速度パターンの例を図4(b)に示す。図4(b)は、図4(a)と同一の座標系であり、図4(a)に示す初期速度パターンに基づいてS18の処理において再生成したものである。図4(b)に示すように、加速区間T1、T2b、T3bにおいてエンジン42の出力を増加して加速区間の最終速度をv2からv3へ増加している。このように、SOCが不足してエンジン42が充電のために停止できないことが予測される場合には、充電タイミングを制御するためにエンジン42が駆動する加速区間T1、T2b、T3bにおいて速度を上げて、減速区間T2a、T3a、T4で回生制御をすることができる。これにより、エンジン42を停止する減速区間T2a、T3a、T4でエンジン42を停止できないという事態が発生することを回避できる。また、加速区間T1、T2b、T3bにおいて加速し速度を上げているので、区間を距離で規定した場合には、加速区間の最終に到達するまでの時間を短縮することができる。このため、短縮した分の時間を減速区間T2a、T3a、T4の走行時間に割り当てることができる。すなわち、エンジン42を駆動する場合には速く移動し、エンジン42を停止する場合には時間を掛けて移動することにより、燃費の良いエンジン42停止走行に時間を掛けることができるので、燃費向上を図ることが可能となる。S18の処理が終了すると、SOC不足量確認処理へ移行する(S20)。
【0036】
S20の処理は、ECU2が実行し、SOCが著しく不足しているか否かを判定する処理である。ECU2は、現状のSOCと不足基準値との差からSOC不足量を算出し、SOCの不足量が所定値以下か否かを判定することで、SOCが著しく不足しているか否かを判定する。所定値として、例えば30%が用いられる。S20の処理において、SOC不足量が所定値以下と判定した場合、すなわち、SOCが著しく不足していないと判定した場合には、信号機判定処理へ移行する(S22)。
【0037】
S22の処理は、ECU2が実行し、ナビゲーションシステム33が出力した交通情報に基づいて、S10の処理で生成した初期速度パターンを採用した場合に直前の信号を通過できるか否か、S18の処理で生成した第1充電速度パターンを採用した場合に直前の信号を通過できるか否かを判定する処理である。交通情報には、例えば点灯色の切換時刻が含まれたものが用いられる。S22の処理において、初期速度パターンを採用すると赤信号で初期速度パターンを採用することで直前の信号を通過できると判定した場合、あるいはどの速度パターンでも信号機で停止することが避けられない場合には、初期速度パターン採用処理へ移行する(S24)。
【0038】
S24の処理は、車両運動制御部12が実行し、S10の処理で生成した初期速度パターンを採用して走行する処理である。このように、SOC不足量が著しくない場合には、なるべくバッテリ44への充電を控えることにより、充電によるエネルギーロスを回避することができる。S24の処理が終了すると、図2,3に示す制御処理を終了する。
【0039】
一方、S20の処理において、SOCが著しく不足していると判定した場合には、第1充電速度パターン採用処理へ移行する(S26)。S26の処理は、車両運動制御部12が実行し、S18の処理で生成した第1充電速度パターンを採用して走行する処理である。S26の処理が終了すると、図2,3に示す制御処理は終了する。
【0040】
また、S22の処理において、初期速度パターンを採用した場合に、直前の信号を通過できず、かつ、第1充電速度パターンを採用した場合に直前の信号を通過することができる場合には、旅行時間を優先して第1充電速度パターン採用処理へ移行する(S26)。
【0041】
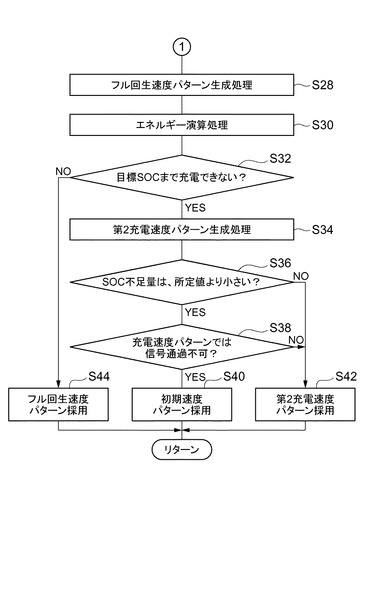
また、S16の処理において、フル回生状態でないと判定した場合には、フル回生速度パターン生成処理へ移行する(図3のS28)。S28の処理は、目標速度パターン再生成部11が実行し、減速区間全体をフル回生状態にした場合の速度パターン(フル回生速度パターン)を生成する処理である。例えば、図4(a)における減速区間T2a、T3a、T4において、バッテリ44の入力密度限界の回生を行う減加速で減速するように目標速度パターンを生成する。目標速度パターンの生成に必要な情報及び手法は、S10の処理と同様である。S28の処理が終了すると、エネルギー演算処理へ移行する(S30)。
【0042】
S30の処理は、ECU2が実行し、各区間の回生エネルギーを演算する処理である。まず、ECU2は、フル回生速度パターンを採用した場合における、減速区間全体の回生エネルギーUを演算する。ここで、車両質量をm、減速区間の初速度をVs、減速区間の終速度(加速区間の初速度)をVe、回生減速度をak1、フル回生減速度をafとすると、各区間の回生エネルギーをUn(n:整数)は、以下の式1のように表される。
【0043】
Un=m・(Vs2−Ve2)・ak1/af …(1)
【0044】
減速区間全体の回生エネルギーUは、各区間の回生エネルギーUnの総和で求めることができる。なお、車両質量mは、例えば諸元情報に基づいて事前に設定される。次に、ECU2は初期速度パターンを採用した場合における、減速区間全体の回生エネルギーUsを演算する。ここで、車両質量をm、減速区間の初速度をV2、減速区間の終速度(加速区間の初速度)をV1、回生減速度をak2、フル回生減速度をafとすると、各区間の回生エネルギーをUsn(n:整数)は、以下の式2のように表される。
【0045】
Usn=m・(V22−V12)・ak2/af …(2)
【0046】
減速区間全体の回生エネルギーUsは、各区間の回生エネルギーUsnの総和で求めることができる。次に、ECU2は、増加見込みエネルギーUzを演算する。増加見込みエネルギーUzは、仮にフル回生状態にした場合、増加するエネルギーを示すものである。この増加見込みエネルギーUzは、以下の式3のように表される。
【0047】
Uz=U−Us …(3)
【0048】
次に、ECU2は、SOC余剰見込みエネルギーUuを演算する。SOC余剰見込みエネルギーUuは、増加見込みエネルギーでSOC不足量Eを補った後に余剰するエネルギーを示すものである。このSOC余剰見込みエネルギーUuは、以下の式4のように表される。
【0049】
Uu=Uz−E …(4)
【0050】
ECU2はSOC余剰見込みエネルギーUuを算出すると、S30の処理を終了し、充電予測判定処理へ移行する(S32)。
【0051】
S32の処理は、ECU2が実行し、SOCを目標SOCまで回復させることができるか否かを判定する処理である。目標SOCは予め設定した所定値であり、例えば50%である。ECU2は、式4を用いて演算したSOC余剰見込みエネルギーUuが負の場合には、目標SOCまで充電することができないと判定し、第2充電速度パターン生成処理へ移行する(S34)。
【0052】
S34の処理は、目標速度パターン再生成部11が実行し、目標速度パターンを再生成する処理である。この処理は、S18の処理と同様であり、第1充電速度パターンと同様の第2速度パターンを再生成する。S34の処理が終了すると、SOC不足量確認処理へ移行する(S36)。
【0053】
S36の処理は、ECU2が実行し、SOCが著しく不足しているか否かを判定する処理である。この処理はS20の処理と同様である。S36の処理において、SOCが著しく不足していないと判定した場合には、信号機判定処理へ移行する(S38)。
【0054】
S38の処理は、ECU2が実行し、ナビゲーションシステム33が出力した交通情報に基づいて、S10の処理で生成した初期速度パターンを採用した場合に直前の信号を通過できるか否か、S34の処理で生成した第2充電速度パターンを採用した場合に直前の信号を通過できるか否かを判定する処理である。この処理はS22の処理と同様である。S38の処理において、初期速度パターンを採用すると赤信号で初期速度パターンを採用することで直前の信号を通過できると判定した場合、あるいはどの速度パターンでも信号機で停止することが避けられない場合には、初期速度パターン採用処理へ移行する(S40)。
【0055】
S40の処理は、車両運動制御部12が実行し、S10の処理で生成した初期速度パターンを採用して走行する処理である。このように、SOCの不足が著しくない場合には、なるべくバッテリ44への充電を控えることにより、充電によるエネルギーロスを回避することができる。S40の処理が終了すると、図2,3に示す制御処理を終了する。
【0056】
一方、S36の処理において、SOCが著しく不足していると判定した場合には、第2充電速度パターン採用処理へ移行する(S42)。S42の処理は、車両運動制御部12が実行し、S34の処理で生成した第2充電速度パターンを採用して走行する処理である。S42の処理が終了すると、図2,3に示す制御処理は終了する。
【0057】
また、S38の処理において、初期速度パターンを採用した場合に、直前の信号を通過できず、かつ、第2充電速度パターンを採用した場合に直前の信号を通過することができる場合には、旅行時間を優先して第2充電速度パターン採用処理へ移行する(S42)。
【0058】
また、S32の処理において、式4を用いて演算したSOC余剰見込みエネルギーUuが正の場合には、目標SOCまで充電することができると判断し、フル回生速度パターン採用処理へ移行する(S44)。S44の処理は、車両運動制御部12が実行し、S28の処理で生成したフル回生速度パターンを採用して走行する処理である。S44の処理が終了すると、図2,3に示す制御処理は終了する。
【0059】
以上で図2,3に示す制御処理を終了する。図2,3に示す制御処理を実行することで、SOCの不足状態に起因した動作による燃費低下を回避することができる。例えば、従来であれば、図4(a)に示すように波状走行する予定であっても、SOCが不足することにより、滑空走行の予定の区間T2a、T3a、T4においてエンジン42が強制始動する場合がある。このため、計画通りの走行を行うことができない場合がある。これに対して、第1実施形態に係る走行制御部1は、所定の速度パターンを生成後、バッテリ44のSOCが不足基準値以下となる予定の場合には、例えば図4(b)に示すように、区間T1、T2b、T3bの加速を大きくするように速度パターンを再生成する。このため、加速区間において増加した加速により車速を上昇させて加速区間の運動エネルギーを大きくすることができる。そして、増加した運動エネルギーを回生によりバッテリ44に充電することができる。このように、バッテリ44のSOCの不足を補うために必要な運動エネルギーの生成タイミングを制御することで、例えばエンジン42停止走行をする予定の走行区間において充電のためにエンジン42を駆動しなければならない事態が発生することを回避することができる。このため、バッテリ44のSOCが不足していても予定通りの走行を行うことができるので、SOC不足状態に起因した動作により燃費が低下することを回避することが可能となる。さらに、減速の際に回生制御による減速を行うように速度パターンを再生成することで、バッテリ44の充電タイミングを制御し、加速中に充電する場合、すなわち力学エネルギー発生と同時に電気エネルギーに変換する場合に比べて目的地までの平均速度を大きくすることができる。このため、加速に必要な時間t0〜t1、t2〜t3、t4〜t5を短縮し、短縮した時間をエンジン42停止による走行時間t1〜t2、t3〜t4、t5〜t6に割り当てることで、エンジン42停止時間をt6〜t2、t8〜t4、t9〜t6と伸ばすことができる。これにより、停止時刻(到着時刻)t6に間に合いつつ燃費向上を図ることが可能となる。
【0060】
(第2実施形態)
第2実施形態に係る走行制御装置(走行制御部)は、第1実施形態に係る走行制御部1とほぼ同様に構成されるものであって、走行制御部1と比べ、SOCの超過を考慮した速度パターンを再生成する点が相違する。なお、第2実施形態においては、第1実施形態と重複する部分は説明を省略し、相違点を中心に説明する。
【0061】
本実施形態に係る走行制御部を備えた車両の構成は、第1実施形態に係る走行制御部1を備えた車両と同様である。また、本実施形態に係る走行制御部は、第1実施形態に係る走行制御部1とほぼ同様に構成され、目標速度パターン再生成部11が有する機能の一部が相違する。
【0062】
目標速度パターン再生成部11は、目標速度パターン生成部10が生成した初期速度パターンを再生成する機能を有している。例えば、バッテリ44のSOCが超過基準値(第2の所定値)以上の場合には、初期速度パターンに基づいて減速する減速区間においてモータ43を駆動させてバッテリ44の放電を行う目標速度パターン(充電速度パターン)を再生成する機能を有している。ここで、超過基準値は不足基準値よりも大きく、例えばバッテリ44のSOC目標値から許容される超過量を加算した値が設定される。超過基準値として、例えば70%が用いられる。また、目標速度パターン再生成部11は、センサ31やナビゲーションシステム33に基づいて後続車両が存在するか否かを判定し、モータ43駆動による放電を、後続車両が存在しない区間よりも後続車両が存在する区間で優先的に行う目標速度パターンを再生成する機能を有している。ここで、モータ43を駆動するためにする放電の電気量は、ハイブリットシステム4の通常のHV制御により決定される。なお、その他の機能は第1実施形態に係る目標速度パターン再生成部11と同様である。
【0063】
次に、第2実施形態に係る走行制御部の動作について説明する。図5,6は、第2実施形態に係る走行制御部の動作を示すフローチャートである。図5,6に示す制御処理は、例えばイグニッションオン又は車両5に備わる開始ボタンがオンされてから、所定のタイミングで繰り返し実行される。
【0064】
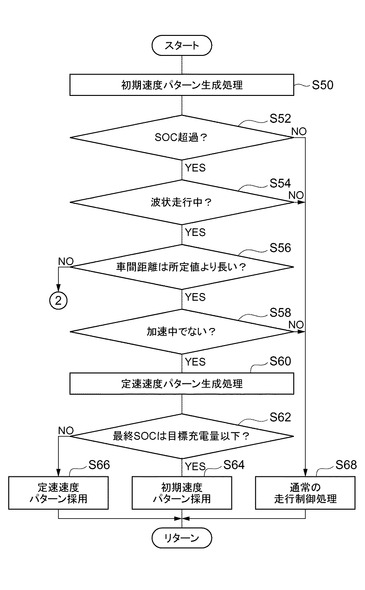
図5に示す制御処理が開始されると、走行制御部は、初期速度パターン生成処理から開始する(S50)。S50の処理は、目標速度パターン生成部10が実行し、初期速度パターンを生成する処理である。この処理は、図2のS10の処理と同様であり、例えば図7(a)に示すような速度パターンが生成される。S50の処理が終了すると、SOC確認処理へ移行する(S52)。
【0065】
S52の処理は、目標速度パターン再生成部11が実行し、バッテリ44のSOCが超過しているか否かを判定する処理である。目標速度パターン再生成部11は、例えば、センサ31から入力したSOCが超過基準値以上であるかを判定する。超過基準値として、例えば70%が用いられる。S12の処理において、SOCが超過していないと判定した場合には、通常走行制御処理へ移行する(S68)。
【0066】
S68の処理は、ECU2が実行し、通常の速度制御処理を行う処理である。通常の速度制御処理は、バッテリ44のSOCを考慮せずに、操舵制御及び加減速制御を行う処理である。例えば低燃費走行をする場合には、燃費に最も良い車速や加速度等を演算して制御する。また、S50の処理で設定した初期速度パターンを採用して走行してもよい。S68の処理が終了すると、図5,6に示す制御処理は終了する。
【0067】
一方、S52の処理において、SOCが超過していると判定した場合には、波状走行判定処理へ移行する(S54)。S54の処理は、目標速度パターン再生成部11が実行し、波状走行中であるか否かを判定する処理である。例えば、図7(a)に示す初期速度パターンにおいて、区間T2、T3は波状走行する区間であり、発進加速を実行している区間T1や減速停止を実行している区間T4は波状走行する区間ではないと判定する。S54の処理において、波状走行中でないと判定した場合には、通常走行制御処理へ移行する(S68)。このように、SOCが超過していても、加速中であればエンジン42の出力を直接駆動力とするため、エネルギー変換によるロスを少なくして効率の良く走行できる。一方、S54の処理において、波状走行中であると判定した場合には、車間距離確認処理へ移行する(S56)。
【0068】
S56の処理は、目標速度パターン再生成部11が実行し、後続車両との車間距離が長いか否かを判定する処理である。ECU2は、例えば、センサ31やナビゲーションシステム33から後続車両の情報を入力し、波状走行区間T2、T3において後続車両との車間距離が所定値より大きいか否かを判定する。所定値には例えば100mが用いられる。S56の処理において、後続車両との車間距離が長いと判定した場合には、加速判定処理へ移行する(S58)。
【0069】
S58の処理は、目標速度パターン再生成部11が実行し、加速中であるか否かを判定する処理である。ECU2は、波状走行区間T2、T3において、加速区間T2b、T3bを走行している場合には加速中であると判定し、減速区間T2a、T3aを走行している場合には、減速中であると判定する。S58の処理において、加速中でないと判定した場合には、通常走行制御処理へ移行する(S68)。このように、SOCが超過していても、加速中であればエンジン42の出力を直接駆動力とするため、エネルギー変換によるロスを少なくして効率の良く走行できる。一方、S58の処理において、加速中でないと判定した場合には、定速速度パターン生成処理へ移行する(S60)。
【0070】
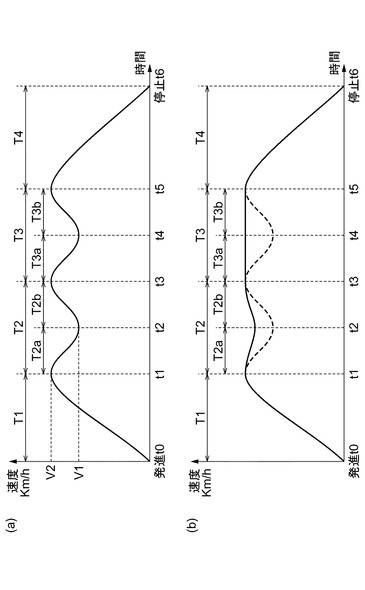
S60の処理は、目標速度パターン再生成部11が実行し、定速速度パターンを生成する処理である。目標速度パターン再生成部11は、例えばS50の処理で生成した初期速度パターンにおける減速区間T2a、T3aにおいて区間T2、T3が一定速度となるように、モータ43を駆動させて走行する場合の定速速度パターンを生成する。S60の処理が終了すると、最終SOC確認処理へ移行する(S62)。
【0071】
S62の処理は、ECU2が実行し、最終停止地点でのSOCが目標充電量以下であるか否かを判定する処理である。ECU2は、モータ43を駆動させて走行した場合の停止時刻t6でのSOCが目標充電量以下であるか否かを判定する。目標充電量は所定値であり、例えば50%が用いられる。S62の処理において、目標充電量以下であると判定した場合には、初期速度パターン採用処理へ移行する(S64)。
【0072】
S64の処理は、車両運動制御部12が実行し、S50の処理で生成した初期速度パターンを採用して走行する処理である。車両運動制御部12は、停止地点で目標充電量以下となる場合には、例えば波状走行する初期速度パターンを採用して走行を行う。このように、モータ43駆動による放電によって停止地点で目標充電量以下になってしまうとSOCの充電が再度必要となるので、モータ43駆動による放電を行わない初期速度パターンを採用することにより、充電によるエネルギー変換ロスの発生を回避することができる。S64の処理が終了すると、図5,6に示す制御処理を終了する。
【0073】
一方、S62の処理において、目標充電量以下でないと判定した場合には、定速速度パターン採用処理へ移行する(S66)。S66の処理は、車両運動制御部12が実行し、S60の処理で生成した定速速度パターンを採用する処理である。このように、すべての減速区間T2a、T3aでモータ43駆動により放電しても最終停止地点において目標充電量を満たしていればSOCの充電が再度必要となる事態が即座に発生することがないので、定速速度パターンを採用する。S66の処理が終了すると、図5,6に示す制御処理を終了する。
【0074】
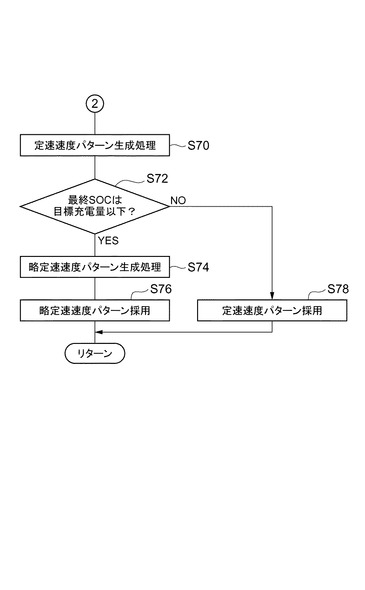
また、S56の処理において、後続車両との車間距離が長くないと判定した場合には、定速速度パターン生成処理へ移行する(図6のS70)。S70の処理は、目標速度パターン再生成部11が実行し、定速速度パターンを生成する処理である。この処理はS60の処理と同様である。定速速度パターンを生成すると、S70の処理は終了し、最終SOC確認処理へ移行する(S72)。
【0075】
S72の処理は、ECU2が実行し、最終停止地点でのSOCが目標充電量以下であるか否かを判定する処理である。この処理はS62の処理と同様である。S72の処理において、最終停止地点でのSOCが目標充電量以下であると判定した場合には、放電速度パターン生成処理へ移行する(S74)。
【0076】
S74の処理は、目標速度パターン再生成部11が実行し、放電速度パターンを生成する処理である。目標速度パターン再生成部11は、例えば、S50の処理で生成した速度パターンの減速区間T2a、T3aにおいて定速走行(加速度0)を上限として、後続車両との車間距離に応じてモータ43駆動による放電によって減速緩和した速度パターンを生成する。まず、目標速度パターン再生成部11は、各区間の放電電力から算出する。ここで、最大放電電力をWm、後続車間係数をKcとすると、バッテリ44の放電電力Hは、例えば以下の式5のように表される。
【0077】
H=Wm・Kc …(5)
【0078】
後続車間係数Kcは、例えば後続車両との車間距離が30mより小さい場合には1が設定され、後続車両との車間距離が30〜100mの場合には、線形補完によって求めた値が設定される。すなわち、車間距離をHcとすると、後続車間係数Kcは、例えば以下の式6のように表される。
【0079】
Kc=1−{(Hc−30)/(100−30)} …(6)
【0080】
次に、目標速度パターン再生成部11は、求めた放電電力Hに基づいて速度パターンを生成する。例えば、区間T2では後続車両との車間距離が44m、区間T3では後続車両との車間距離が20mであるとする。すると、後続車両との車間距離が短い区間T3aでの放電電力Hは、式5より最大放電電力Wmで実行され、区間T3は一定速度となる。一方、後続車両との車間距離が長い区間T3aでの放電電力Hは、式6より後続車間係数Kcが0.2であるので、式5より0.8Wmとなる。これにより、例えば図7(b)に示すように、後続車両との車間距離に応じてモータ43駆動により放電する区間を変更する放電速度パターンを生成することができる。S74の処理が終了すると、放電速度パターン採用処理へ移行する(S76)。
【0081】
S76の処理は、車両運動制御部12が実行し、S74の処理で生成した放電速度パターンを採用して走行する処理である。S76の処理が終了すると、図5,6に示す制御処理を終了する。
【0082】
一方、S72の処理において、最終停止地点でのSOCが目標充電量以下でないと判定した場合には、定速速度パターン採用処理へ移行する(78)。S78の処理は、車両運動制御部12が実行し、S70の処理で生成した定速速度パターンを採用して走行する処理である。このように、すべての減速区間T2a、T3aでモータ43駆動により放電しても最終停止地点において目標充電量を満たしていればSOCの充電が再度必要となる事態が即座に発生することがないので、定速速度パターンを採用する。S78の処理が終了すると、図5,6に示す制御処理を終了する。
【0083】
以上で図5,6に示す制御処理を終了する。図5,6に示す制御処理を実行することで、SOCの超過状態を回避するためにモータ43駆動により放電するタイミングを制御して燃費向上を図ることができる。
【0084】
ところで、従来の走行制御装置であれば、図7(a)に示すように波状走行する予定であっても、SOCが超過した時点でモータ43駆動により放電を行う場合がある。ハイブリットシステム4において、力学エネルギーと電気エネルギーを変換するだけでエネルギーロスが生じるため、バッテリ44からの放電はエネルギーロスとなる。このため、変換によるエネルギーロスにより非効率な走行となる場合がある。
【0085】
これに対して、第2実施形態に係る走行制御部によれば、所定の速度パターンを生成後、バッテリ44が満充電状態となることを回避するためにバッテリ44のSOCをモータ43駆動による放電によって減少させる場合には、例えば図7(b)に示すように、放電タイミングを制御して減速区間T2a、T2bを走行する際に行わせることができる。これにより、例えば、加速と減速とを繰り返す低燃費な目標速度パターンをなだらかな目標速度パターンとすることができるので、乗り心地を向上することが可能となる。さらに、放電タイミングを制御することで、バッテリ44が満充電状態となることを回避し、回生制御により得られる電気エネルギーをバッテリ44に無駄なく充電することができる。
【0086】
また、第2実施形態に係る走行制御部によれば、モータ43駆動による放電によってバッテリ44のSOCを減少させる場合には、後続車両が近くに存在する区間T3aで優先的にモータ43を駆動するため、後続車両の走行に影響を与えやすい波状走行を定速走行に近づけることができる。また、後続車両の走行に影響を与えやすい低速走行の速度を上げることができる。このため、低燃費走行を実行しつつ交通流の妨げになることを回避することができる。
【0087】
(第3実施形態)
第3実施形態に係る走行制御装置(走行制御部)は、第1実施形態に係る走行制御部1とほぼ同様に構成されるものであって、走行制御部1と比べ、目標とした速度パターンを低燃費に制御することができる機能を有する点が相違する。なお、第3実施形態においては、第1実施形態と重複する部分は説明を省略し、相違点を中心に説明する。
【0088】
本実施形態に係る走行制御部を備えた車両の構成は、第1実施形態に係る走行制御部1を備えた車両と同様である。また、本実施形態に係る走行制御部は、第1実施形態に係る走行制御部1とほぼ同様に構成され、車両運動制御部12が有する機能の一部が相違する。
【0089】
車両運動制御部12は、目標速度パターンにより規定された各区間での目標速度に基づいた走行制御を行う際に、エンジン42の動作状態情報、車速と目標速度との差を示す速度超過不足情報、及び、バッテリ44のSOCと目標SOCとの差を示すSOC過不足情報に基づいてフィードバック制御を行う機能を有している。その他の機能については、第1実施形態と同様である。
【0090】
次に、第3実施形態に係る走行制御部の動作について説明する。図8〜11は、第3実施形態に係る走行制御部の動作を示すフローチャートである。図8〜11に示す制御処理は、例えばイグニッションオン又は車両5に備わる開始ボタンがオンされてから、所定のタイミングで繰り返し実行される。
【0091】
図8に示す制御処理が開始されると、走行制御部は、速度パターン生成処理から開始する(S80)。S80の処理は、目標速度パターン生成部10が実行し、速度パターンを生成する処理である。この処理は、図2のS10の処理と同様であり、例えば図4(a)に示すような速度パターンが生成される。以下ではこの目標速度パターンに沿って車両制御を実行する。S80の処理が終了すると、速度誤差確認処理へ移行する(S82)。
【0092】
S82の処理は、車両運動制御部12が実行し、速度誤差を算出する処理である。車両運動制御部12は、センサ31が取得した車速と、S80の処理で生成した速度パターンの目標車速との差を算出し速度誤差とする。S82の処理が終了すると、誤差判定処理へ移行する(S84)。
【0093】
S84の処理は、車両運動制御部12が実行し、速度誤差の大きさを判定する処理である。車両運動制御部12は、S82の処理で算出した速度誤差の絶対値が所定値以上か否かを判定する。所定値として、例えば0.3km/hが用いられる。S84の処理において、速度誤差が大きくないと判定した場合には、車速を変更する必要がないので、図8〜11までの処理を終了する。一方、S84の処理において、速度誤差が大きいと判定した場合には、エンジン42状態確認処理へ移行する(S86)。
【0094】
S86の処理は、車両運動制御部12が実行し、エンジン42状態が停止しているか否かを判定する処理である。車両運動制御部12は、例えば減速中であったり、滑空走行中である場合にはエンジン42停止中であると判定する。S86の処理において、エンジン42停止中であると判定した場合には、フィードバックパラメータ変更処理へ移行する(S88)。
【0095】
S88の処理は、車両運動制御部12が実行し、実速度を目標速度とするためのフィードバック制御のパラメータを変更する処理である。この処理の詳細は後述する。S88の処理が終了すると、指示加速度演算処理へ移行する(S90)。
【0096】
S90の処理は、車両運動制御部12が実行し、一般的な速度フィードバック制御を行う。車両運動制御部12は、例えば、S80の処理で生成した速度パターンの微分を求めて目標加速度amとする。そして、速度誤差をVh、比例ゲイン(Pゲイン)をPとすると、指示加速度ahは以下の式7で表すことができる。
【0097】
ah=am+Vh・P
【0098】
このように、車両運動制御部12は、得られた目標加速度amをフィードバック項として速度誤差に対して比例ゲイン(Pゲイン)のフィードバック項を加える制御を行う。比例ゲインPは、基本ゲインとして所定値P0が設定される。そして、車両運動制御部12は、所定の条件を満たす場合には、後述するS88の処理及びS96の処理において比例ゲインPを変更する。S90の処理が終了すると、制御継続確認処理へ移行する(S92)。
【0099】
S92の処理は、車両運動制御部12が実行し、フィードバック制御が継続しているか否かを判定する処理である。S92の処理において、フィードバック制御が終了していると判定した場合には、図8〜11に示す制御処理を終了する。一方、S92の処理において、フィードバック制御が終了していないと判定した場合には、速度誤差算出処理へ再度移行する(S82)。
【0100】
また、S86の処理において、エンジン42停止中であると判定した場合には、エンジン42状態判定処理へ移行する(S94)。S94の処理は、車両運動制御部12が実行し、エンジン42が動作しているか否かを判定する処理である。車両運動制御部12は、例えばエンジン42動作中でないと判定した場合には、指示加速度演算処理へ移行する(S90)。一方、加速中である場合等、エンジン42動作中であると判定した場合には、フィードバックパラメータ変更処理へ移行する(S96)。
【0101】
S96の処理は、車両運動制御部12が実行し、実速度を目標速度とするためのフィードバック制御のパラメータを変更する処理である。この処理の詳細は後述する。S96の処理が終了すると、指示加速度演算処理へ移行する(S90)。
【0102】
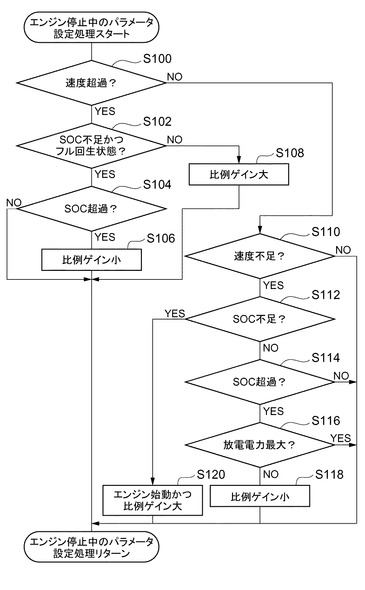
以上で、図8に示す制御処理を終了する。次に、図8のS88の処理であるエンジン42停止中のフィードバックパラメータ変更処理の詳細を図9を用いて説明する。
【0103】
図9に示す制御処理は、図8のS86の処理において、エンジン42停止状態と判定した場合に実行する。まず、速度判定処理から開始する(S100)。S100の処理は、車両運動制御部12が実行し、速度超過状態であるか否かを判定する処理である。車両運動制御部12は、例えば速度誤差が正であり、所定値以上であるか否かを判定する。所定値として、例えば0.3km/hが用いられる。S100の処理において、速度超過状態であると判定した場合には、バッテリ44のSOC状態及び回生状態判定処理へ移行する(S102)。
【0104】
S102の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態とハイブリットシステム4の回生状態を判定する処理である。車両運動制御部12は、センサ31からバッテリ44のSOCを確認し、不足基準値以下であるか否かを判定する。不足基準値として、例えば40%が用いられる。次に、車両運動制御部12は、センサ31から車速を入力し、ハイブリットシステム4における速度ごとの回生限界(フル回生状態)となっているかを確認する。S102の処理において、SOCが不足基準値以下すなわち不足している場合であって、フル回生状態でない場合には、比例ゲイン変更処理へ移行する(S108)。
【0105】
S108の処理は、車両運動制御部12が実行し、比例ゲインPを大きくする処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、SOCが不足しており、回生能力に余力がある場合には比例ゲインPを大きく設定する。S108の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を大きくすることができる。よって、SOCが不足している場合には、減速中や滑空走行中のようなエンジン42停止中の速度超過に関して積極的に回生が行えるようにフィードバック制御を変更することができるので、燃費向上を図ることができる。
【0106】
一方、S102の処理において、SOCが不足している場合であってフル回生状態である場合、あるいはSOCが不足基準値以上の場合には、SOC状態確認処理へ移行する(S104)。S104の処理は、車両運動制御部12が実行し、SOCが超過状態であるか否かを判定する処理である。車両運動制御部12は、例えばSOCが超過基準値以上であるか否かを判定する。超過基準値として、例えば60%が用いられる。S104の処理において、SOCが超過状態であると判定した場合には、比例ゲイン変更処理へ移行する(S106)。
【0107】
S106の処理は、車両運動制御部12が実行し、比例ゲインPを小さくする処理である。例えば、基本ゲインP0を0.5倍した値を比例ゲインPに設定する。このように、SOCが超過状態であって回生能力が限界である場合には、比例ゲインPを小さく設定する。S106の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、減少させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を小さくすることができる。よって、SOCが超過状態であって回生能力が限界である場合には、滑空走行のようなエンジン42停止状態を優先し、回生力が増えないようにフィードバック制御を変更することができるので、燃費向上を図ることができる。
【0108】
一方、S104の処理において、SOCが超過状態でないと判定した場合には、SOCが不足しているがフル回生状態であり、あるいはSOCが理想的な状態であるので、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。
【0109】
また、S100の処理において、速度超過状態でないと判定した場合には、速度判定処理へ移行する(S110)。S110の処理は、車両運動制御部12が実行し、車速が不足しているか否かを判定する処理である。車両運動制御部12は、センサ31から入力した車速が所定値以下であるか否かを判定する。所定値として、例えば−0.3km/hが用いられる。S110の処理において、速度不足状態でないと判定した場合には、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。一方、S110の処理において、速度不足状態であると判定した場合には、SOC状態判定処理へ移行する(S112)。
【0110】
S112の処理は、車両運動制御部12が実行し、SOCが不足しているか否かを判定する処理である。この判定処理は、S102のSOC判定処理と同様である。S112の処理において、SOCが不足していないと判定した場合には、SOC超過判定処理へ移行する(S114)。
【0111】
S114の処理は、車両運動制御部12が実行し、SOCが超過しているか否かを判定する処理である。この処理は、S104の処理と同様である。S114の処理において、SOCが超過していないと判定した場合には、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。一方、S114の処理において、SOCが超過していると判定した場合には、放電電力判定処理へ移行する(S116)。
【0112】
S116の処理は、車両運動制御部12が実行し、加速に用いる放電が電池出力限界であるか否かを判定する処理である。S116の処理において、放電が最大電力である場合には、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。一方、S116の処理において、放電が最大電力でない場合には、比例ゲイン変更処理へ移行する(S118)。
【0113】
S118の処理は、車両運動制御部12が実行し、比例ゲインPを大きくする処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、速度が不足しており、かつSOCが超過している場合には比例ゲインPを大きく設定する。S118の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、放電加速度を大きくすることができる。よって、エンジン42停止中に速度が不足してSOCが超過している場合には放電を大きくするようにフィードバック制御を変更することができるので、効率的にエネルギーを使用することができる。
【0114】
一方、S112の処理において、SOCが不足していると判定した場合には、比例ゲイン変更処理へ移行する(S120)。S120の処理は、車両運動制御部12が実行し、比例ゲインPを大きくするとともに、エンジン42を始動する処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、速度が不足しており、かつSOCが不足している場合には、比例ゲインPを大きく設定するとともにエンジン42を始動する。S120の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、加速度を大きくすることができる。このため、速度が不足してSOCが不足している場合にはエンジン42の出力を大きくするようにフィードバック制御を変更することができるので、速度超過を誘発させることができる。エンジン42を始動させた場合には、エネルギー変換ロスを考慮して充電は行わずに、速度超過が発生した際に回生を行うように制御する。これにより、燃費向上を図ることができる。
【0115】
以上で、図9に示す制御処理を終了する。次に、図8のS96の処理であるエンジン42動作中のフィードバックパラメータ変更処理の詳細を図10,11を用いて説明する。
【0116】
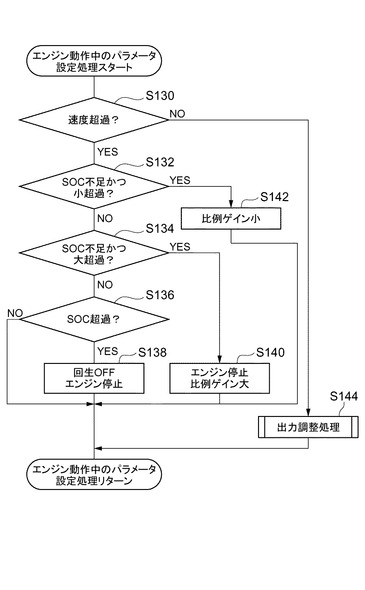
図10に示す制御処理は、図8のS94の処理において、エンジン42動作状態と判定した場合に実行する。まず、速度判定処理から開始する(S130)。S130の処理は、車両運動制御部12が実行し、速度超過状態であるか否かを判定する処理である。この処理は図9のS104の処理と同様である。S130の処理において、速度超過状態であると判定した場合には、バッテリ44のSOC状態及び速度超過量判定処理へ移行する(S132)。
【0117】
S132の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態とS130の処理で判定した速度超過量を判定する処理である。SOC状態を確認する処理は、図9のS102の処理と同様である。また、車両運動制御部12は、S130の処理で演算した速度超過量が所定値未満の小さな超過量であるか否かを判定する。所定値として、例えば1km/hが用いられる。S132の処理において、SOCが不足している場合であって、小さな速度超過量である場合には、比例ゲイン変更処理へ移行する(S142)。
【0118】
S142の処理は、車両運動制御部12が実行し、比例ゲインPを小さくする処理である。例えば、基本ゲインP0を0.5倍した値を比例ゲインPに設定する。このように、SOCが不足状態であっても、速度超過が小さい場合には比例ゲインPを小さく設定する。S142の処理が終了すると、図10に示す制御処理を終了する。これにより、図8のS90の処理において、減少させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を小さくすることができる。よって、SOCが不足状態であって小さな速度超過である場合には、エンジン42加速を継続した制御を行い、速度超過を誘発させる制御を行うことができる。
【0119】
一方、S132の処理において、SOCが不足し速度超過が小さくないと判定した場合、あるいはSOCが不足していないと判定した場合には、SOC状態確認処理へ移行する(S134)。S134の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態とS130の処理で判定した速度超過量を判定する処理である。SOC状態を確認する処理は、図9のS102の処理と同様である。また、車両運動制御部12は、S130の処理で演算した速度超過量が所定値以上の大きな超過量であるか否かを判定する。所定値として、例えば1km/hが用いられる。S132の処理において、SOCが不足している場合であって、大きな速度超過量である場合には、比例ゲイン変更処理へ移行する(S140)。
【0120】
S140の処理は、車両運動制御部12が実行し、比例ゲインPを大きく変更してエンジン42を停止する処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、速度が超過しており、かつSOCが不足している場合には比例ゲインPを大きく設定する。S140の処理が終了すると、図10に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を大きくすることができる。よって、速度が超過してSOCが超過している場合には、エンジン42を停止して積極的に回生するようにフィードバック制御を変更することができるので、燃費向上を図ることができる。
【0121】
一方、S134の処理において、SOCが不足していないと判定した場合には、SOC状態確認処理へ移行する(S136)。S136の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態を確認する処理である。SOC状態を確認する処理は、図9のS104の処理と同様である。S136の処理において、SOCが超過していないと判定した場合には、図10に示す制御処理を終了する。一方、S136の処理において、SOCが超過していると判定した場合には、滑空走行処理へ移行する(S138)。
【0122】
S138の処理は、車両運動制御部12が実行し、滑空走行を行う処理である。車両運動制御部12は、エンジン42を停止するとともにハイブリットシステム4に回生停止信号を出力する。S138の処理が終了すると、図10に示す制御処理を終了する。これにより、SOCが超過状態であって速度超過である場合には、エンジン42を停止し回生を実行しない滑空走行をすることにより燃費向上を図ることができる。
【0123】
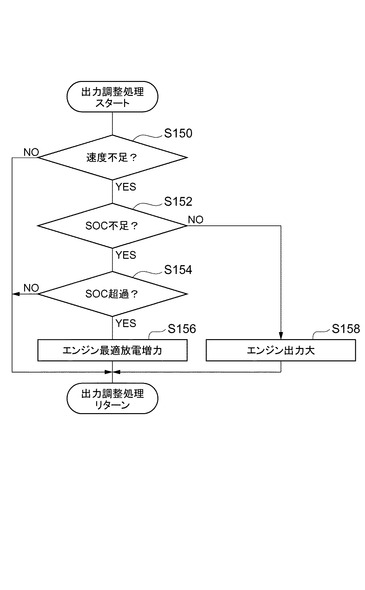
一方、S130の処理において、速度超過でないと判定した場合には、出力調整処理へ移行する(S144)。S144の処理の詳細は、図11に記載されている。図11に示すように、出力調整処理は、速度判定処理から開始する(S150)。S150の処理は、車両運動制御部12が実行し、車速が不足しているか否かを判定する処理である。処理内容は、図9のS110の処理と同様である。S150の処理において、速度不足でないと判定した場合には、図11に示す制御処理を終了する。一方、S150の処理において、速度不足であると判定した場合には、SOC状態判定処理へ移行する(S152)。
【0124】
S152の処理は、車両運動制御部12が実行し、SOCが不足しているか否かを判定する処理である。この判定処理は、図9のS102のSOC判定処理と同様である。S152の処理において、SOCが不足していないと判定した場合には、出力制御処理へ移行する(S158)。
【0125】
S158の処理は、車両運動制御部12が実行し、エンジン42出力を増大する処理である。車両運動制御部12は、例えばエンジン42の非効率領域であっても高出力(高回転)で作動させる。S158の処理が終了すると、図11に示す制御処理を終了する。
【0126】
一方、S152の処理において、SOCが不足していると判定した場合には、SOC状態確認処理へ移行する(S154)。S154の処理は、SOCが超過しているか否かを判定する処理である。この処理は、図9のS104の処理と同様である。S154の処理において、SOCが超過状態でないと判定した場合には、図11に示す制御処理を終了する。一方、S154の処理において、SOCが超過状態であると判定した場合には、出力制御処理へ移行する(S156)。
【0127】
S156の処理は、車両運動制御部12が実行し、エンジン42及びモータ43の出力を制御する処理である。車両運動制御部12は、エンジン42を最適効率で回転させるとともに、駆動力の不足分をバッテリ44の放電によるモータ出力によって補うようにハイブリットシステム4へ信号を送信する。S156の処理が終了すると、図11に示す制御処理を終了する。
【0128】
以上で、図10,11に示す制御処理を終了する。図8〜11に示す制御処理を実行することにより、速度パターンに最適なフィードバック制御を行うことによって低燃費走行を実現することができる。
【0129】
ところで、従来のフィードバック制御であれば、計画した速度パターンを忠実に実行することを最優先としていたため、目標速度に合わせ込む際にエンジン42出力を増加させたり、あるいはSOCが超過している状態で回生ブレーキを行う場合がある。このため、速度パターンを低燃費に実行することができない場合がある。
【0130】
これに対して、第3実施形態に係る走行制御部によれば、エンジン42の動作状態情報、速度超過不足情報、及びSOC過不足情報に基づいてフィードバック制御を行うことができる。これにより、目標速度パターンにより規定される目標速度に対してフィードバック制御を行う場合に、目標値にあわせることを最優先とせずに、低燃費とSOC状態を考慮しながら目標値にあわせることができる。よって、速度パターンを低燃費に実行することができる。
【0131】
なお、上述した各実施形態は本発明に係る走行制御装置の一例を示すものである。本発明に係る走行制御装置は、各実施形態に係る走行制御装置に限られるものではなく、各請求項に記載した要旨を変更しない範囲で、各実施形態に係る走行制御装置を変形し、又は他のものに適用したものであってもよい。
【0132】
例えば、上記各実施形態において、自動運転機能を備えた車両5について説明したが、運転支援システム機能を備えた車両5であってもよい。この場合、例えば、車両制御を支援するディスプレイ等を備えて構成とするとよい。
【0133】
また、第3実施形態において、エンジン42の動作状態情報、速度超過不足情報、及びSOC過不足情報に基づいてフィードバック制御を行う例を説明したが、これらの何れか一つのパラメータに基づいてフィードバック制御を行う場合でもよい。
【図面の簡単な説明】
【0134】
【図1】本実施形態に係る走行制御部を備える車両の構成概要を示すブロック図である。
【図2】第1実施形態に係る走行制御部の動作を示すフローチャートである。
【図3】第1実施形態に係る走行制御部の動作を示すフローチャートである。
【図4】第1実施形態に係る走行制御部が生成する速度パターンの概要図である。
【図5】第2実施形態に係る走行制御部の動作を示すフローチャートである。
【図6】第2実施形態に係る走行制御部の動作を説明する概要図である。
【図7】第2実施形態に係る走行制御部が生成する速度パターンの概要図である。
【図8】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【図9】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【図10】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【図11】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【符号の説明】
【0135】
1…走行制御部(走行制御装置)、2…ECU、5…車両、10…目標速度パターン生成部(目標速度パターン生成手段)、11…目標速度パターン再生成部(目標速度パターン再生成手段)、12…車両運動制御部(車両運動制御手段)、42…エンジン、43…モータ、44…バッテリ。
【技術分野】
【0001】
本発明は、車両の走行を制御する走行制御装置に関するものである。
【背景技術】
【0002】
従来、車両の走行を制御する装置として、燃費が向上するように車両の走行を制御するものが知られている(例えば、特許文献1参照)。特許文献1の装置は、エンジンとモータを駆動源とするハイブリット車両において、車両を目標速度に維持しながら燃費向上を図るものである。具体的には、目標速度より大きい上限速度、及び目標速度より小さい下限速度を設定し、設定した上限速度までエンジンで加速させたのちにエンジンを停止させて走行させ(惰性走行)、車速が下限速度に到達した後、エンジンを始動させて上限速度まで加速させる走行を行うものである。このように、特許文献1の装置は目標速度を基準として加速と減速とを繰り返す速度制御を実行するものである。
【特許文献1】特開2007−187090号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、ハイブリット車両の駆動源の一つであるモータはバッテリを電源としている。一般的にバッテリの充電量(SOC:State Of Charge)には目標値があり、この目標値を基準に充電するか否かを判定している。このため、従来の走行制御装置にあっては、惰性走行をする予定の区間であっても、例えば、バッテリのSOCが不足しているためにエンジンを作動させなければならない場合がある。また、回生制御をしながら走行する予定の区間であっても、バッテリが満充電状態であるため充電できない場合がある。このように、従来の走行制御装置は、バッテリのSOCの状態によっては予定通りの低燃費走行が行えず、燃費向上が妨げられるおそれがある。
【0004】
そこで、本発明はこのような技術課題を解決するためになされたものであって、バッテリのSOCの状態を考慮して燃費低下を回避する走行制御を行うことができる走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
すなわち本発明に係る走行制御装置は、エンジン及びモータを有し、モータを発電機として作動させ回生制御によりバッテリを充電可能に構成された車両の走行制御装置であって、所定地点までの行程を複数の区間に分割して各区間での目標速度パターンを生成する目標速度パターン生成手段と、バッテリのSOCが第1の所定値以下の場合には、目標速度パターンに基づいて加速する加速区間において目標速度パターンに規定される加速よりも大きな加速を行い、目標速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターンを再生成する目標速度パターン再生成手段とを備えて構成される。
【0006】
この発明では、所定の速度パターンを生成後、バッテリのSOCが第1の所定値以下となる場合には、加速区間の加速を大きくするように速度パターンを再生成する。加速区間において増加した加速により車速を上昇させて加速区間の運動エネルギーを大きくすることができる。このように、バッテリのSOCの不足を補うために必要な運動エネルギーの生成タイミングを制御することで、例えばエンジン停止による惰性走行をする予定の走行区間において充電のためにエンジンを駆動しなければならない事態が発生することを回避することができる。このため、バッテリのSOCが不足していても予定通りの走行を行うことができるので、SOC不足状態に起因した動作により燃費が低下することを回避することが可能となる。また、この発明では、減速の際に回生制御による減速を行うように速度パターンを再生成する。このようにバッテリの充電タイミングを制御することで、加速中に充電する場合、すなわち力学エネルギー発生と同時に電気エネルギーに変換する場合に比べて所定地点までの平均速度を大きくすることができる。このため、全体の旅行時間を短縮することが可能となる。これにより、例えば、短縮した分の旅行時間を燃費優先の惰性走行や低速走行に割り当てることができるため、決められた到着時刻に間に合いつつ燃費向上を図ることが可能となる。
【0007】
ここで、モータは、バッテリから供給される電力により駆動源として機能し、目標速度パターン再生成手段は、バッテリのSOCが第1の所定値よりも大きい第2の所定値以上の場合には、減速区間においてモータを駆動させて放電を行う目標速度パターンを再生成することが好適である。
【0008】
このように構成することで、バッテリが満充電状態となることを回避するためにバッテリのSOCをモータ駆動による放電により減少させる場合には、減速区間を走行する際に行わせることができる。これにより、例えば、加速と減速とを繰り返す低燃費な目標速度パターンをモータの駆動力によってなだらかな目標速度パターンとすることができる。このように、放電タイミングを制御することで、回生制御により得られる電気エネルギーをバッテリに無駄なく充電することができるとともに、乗り心地を向上することが可能となる。
【0009】
また、目標速度パターン再生成手段は、バッテリのSOCが第1の所定値よりも大きい第2の所定値以上の場合には、モータを駆動源として駆動させるための放電を、後続車両の存在しない区間よりも後続車両の存在する区間で優先させる目標速度パターンを再生成することが好適である。
【0010】
このように構成することで、モータ駆動による放電によってバッテリのSOCを減少させる場合には、後続車両が存在する区間で優先的にモータを駆動させるため、後続車両の走行に影響を与えやすい低速走行や波状走行をモータの駆動力によって定速走行に近づけることができる。よって、低燃費走行を実行しつつ交通流の妨げになることを回避することができる。
【0011】
さらに、目標速度パターンにより規定された各区間での目標速度に基づいた走行制御を行う際に、エンジンの動作状態情報、車速と目標速度との差を示す速度超過不足情報、及び、バッテリのSOCと目標SOCとの差を示すSOC過不足情報の何れか一つに基づいてフィードバック制御を行う走行制御手段を備えることが好適である。
【0012】
このように構成することで、生成あるいは再生成した目標速度パターンにより規定される目標速度に対してフィードバック制御を行う場合に、燃費効率の良い実行を行うことができる。
【発明の効果】
【0013】
本発明によれば、バッテリのSOCの状態を考慮して燃費低下を回避する走行制御を行うことができる。
【発明を実施するための最良の形態】
【0014】
以下、添付図面を参照して本発明の実施形態について説明する。なお、各図において同一又は相当部分には同一の符号を付し、重複する説明を省略する。
【0015】
(第1実施形態)
第1実施形態に係る走行制御装置は、バッテリを回生制御により充電可能に構成された車両の走行制御装置であって、例えば、自動運転機能を備えた車両や、追従運転や車線維持運転などの運転者支援システムを搭載した車両に好適に採用されるものである。
【0016】
最初に、本実施形態に係る走行制御装置(走行制御部)の構成を説明する。図1は本発明の実施形態に係る走行制御部を備えた車両の構成を示すブロック図である。図1に示す車両5は、自動運転機能を有する車両であって、エンジン42、モータ43及びバッテリ44を含むハイブリットシステム4を備えている。
【0017】
ハイブリットシステム4は、エンジン42及びモータ43の2つの駆動源を、単独であるいは組み合わせて駆動させることにより車両5を走行させる機能を有している。すなわち、ハイブリットシステム4は、エンジン42を停止したままの惰性による走行、いわゆる滑空走行が可能に構成されている。エンジン42は、例えば電子スロットル等のスロットルアクチュエータで出力が制御可能に構成されている。モータ43は、接続されたバッテリ44から供給される電力、あるいは発電機(不図示)を介して供給される電力により駆動する機能を有している。また、ハイブリットシステム4は、回生ブレーキあるいは発電機により、モータ43を回転させて運動エネルギーを電気エネルギーに変換する回生制御を行う機能を有している。すなわち、モータ43は発電機としても機能する。そして、ハイブリットシステム4は、得られた電気エネルギーをバッテリ44に充電する機能を有している。また、ハイブリットシステム4は、後述するECU(Electronic Control Unit)2に接続され、ECU2から出力される信号に基づいて駆動制御、回生制御を行う機能を有している。
【0018】
また、車両5は、GPS(Global Positioning System)受信機30、センサ31、操作部32、ナビゲーションシステム33、ECU2、操舵アクチュエータ40、ブレーキアクチュエータ41を備えている。ここで、GPSは、衛星を用いた計測システムのことであり、自車両の現在位置の把握に好適に用いられるものである。また、ECUは、電子制御する自動車デバイスのコンピュータであり、CPU(Central Processing Unit)、ROM(Read Only Memory)やRAM(Random Access Memory)等のメモリ、及び入出力インターフェイスなどを備えて構成されている。
【0019】
GPS受信機30は、例えば、車両5の位置情報を受信する機能を有している。また、GPS受信機30は、受信した位置情報をECU2へ出力する機能を有している。
【0020】
センサ31は、車両5の周囲の走行環境情報や、車両5の車両状態情報を取得する機能を有している。センサ31としては、例えば、車両5の走行レーンを認識するためのレーン認識センサや画像センサ、車両5の周辺の障害物や後続車両を検知し距離情報を取得する電磁波センサやミリ波センサ、ヨーレートを計測するヨーレートセンサ、バッテリ44のSOCを検出するセンサ、ハンドル舵角及びタイヤ角を検知する舵角センサ、加速度を検出する加速度センサ、車輪速を計測する車輪速センサ等が用いられる。また、センサ31は、取得した情報をECU2へ出力する機能を有している。
【0021】
操作部32は、運転者の要求する条件を入力する機能を有している。操作部32としては、例えば、目標地点、目標旅行時間、乗り心地レベル等を入力する操作パネル等が用いられる。また、操作部32は、入力した情報をECU2へ出力する機能を有している。
【0022】
ナビゲーションシステム33は、所定地点(例えば目的地)までの経路案内等を行う機能を有している。また、ナビゲーションシステム33は、例えば地図データベースから現在走行中付近の道路情報を読み出し、その道路情報をナビ信号としてECU2へ出力する機能を有している。さらに、ナビゲーションシステム33は、信号機点灯情報等の交通情報をナビ信号としてECU2へ出力する機能を有している。
【0023】
ECU2は、目標速度パターン生成部(目標速度パターン生成手段)10、目標速度パターン再生成部(目標速度パターン再生成手段)11、車両運動制御部12、加減速制御部20及び操舵制御部21を備えており、目標速度パターン生成部10、目標速度パターン再生成部11及び車両運動制御部12により走行制御部1が構成されている。
【0024】
目標速度パターン生成部10は、車両5の目標速度パターンを生成する機能を有している。目標速度パターンは、例えば、時刻又は距離に依存した速度を示すものである。目標速度パターン生成部10は、所定地点までの行程を複数の区間に分割して各区間での目標速度パターン(初期速度パターン)を生成する機能を有している。例えば、目標速度パターン生成部10は、操作部32が出力した目的地と、ナビゲーションシステム33が出力した地図情報等に基づいて、目的地までの行程を複数の区間に分割する機能を有している。そして、目標速度パターン生成部10は、例えば、センサ31が入力した車両5の周囲の走行環境情報及びECU2のメモリに格納された車両情報に基づいて、分割した区間ごとに初期速度パターンを生成する機能を有している。例えば、目標速度パターン生成部10は、車両の走行において必ず満たさなければならない条件である拘束条件と、重視する項目を評価するための項を含む評価関数とを用いた最適化処理により、速度パターンを生成する機能を有している。重視する項目が燃費の場合、例えばエンジン42の熱効率を評価する項を評価関数に含むことによって、低燃費な初期速度パターンを生成することができる。この低燃費な初期速度パターンは、エンジン42の熱効率の評価により、例えば20km/h程度の低速な速度パターンや、加速する区間と減速する区間を繰り返す波状の速度パターンとなる。なお、加速区間においてはエンジン42の熱効率が最も良い条件で生成され、減速区間においてはエンジン42を停止した走行、いわゆる滑空走行となる。また、目標速度パターン生成部10は、生成した初期速度パターンを目標速度パターン再生成部11へ出力する機能を有している。
【0025】
目標速度パターン再生成部11は、目標速度パターン生成部10が生成した初期速度パターンを再生成する機能を有している。例えば、バッテリ44のSOCが不足基準値(第1の所定値)以下の場合には、初期速度パターンに基づいて加速する加速区間において初期速度パターンに規定される加速よりも大きな加速を行い、初期速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターン(充電速度パターン)を再生成する機能を有している。ここで、不足基準値は、例えばバッテリ44のSOC目標値から許容される不足量を減算した値が設定される。不足基準値として、SOCを全体容量に対する割合で表示した場合、例えば50%〜40%が用いられる。なお、以下では、SOCは全体容量に対する割合で表示するものとする。また、増分する加速量は、ハイブリットシステム4の通常のHV制御により決定される。さらに、目標速度パターン再生成部11は、再生成した速度パターンを車両運動制御部12へ出力する機能を有している。
【0026】
車両運動制御部12は、目標速度パターン及びセンサ31からの周囲の走行環境や自車両の走行状態に基づいて、操舵制御情報や加減速制御情報を算出する機能を有している。車両運動制御部12は、初期速度パターンと充電速度パターンのうち、ECU2によって選択された速度パターンを用いて制御情報を生成する機能を有している。速度パターンの選択は、例えば、ナビゲーションシステム33により出力された交通情報に基づいてECU2により行われる。また、車両運動制御部12は、算出した操舵制御情報を操舵制御部21へ、算出した加減速制御情報を加減速制御部20へ出力する機能を有している。さらに、車両運動制御部12は、モータ43を駆動あるいは発電機として作動させてバッテリ44の放電や充電を行うタイミング情報をハイブリットシステム4へ出力する機能を有している。例えば、車両運動制御部12は、充電速度パターンの減速区間において回生ブレーキを作動させる命令信号をハイブリットシステム4に出力する機能を有している。
【0027】
加減速制御部20は、車両運動制御部12が出力した加減速制御情報に基づいて、ハイブリットシステム4や、ブレーキアクチュエータ41を制御するための信号を生成し、生成した制御信号をハイブリットシステム4及びブレーキアクチュエータ41へ出力する機能を有している。ここで、ブレーキアクチュエータ41は、例えば油圧式ブレーキの場合には、各車輪のブレーキ油圧の調整を行うバルブ等が用いられる。
【0028】
操舵制御部21は、車両運動制御部12が出力した操舵制御情報に基づいて操舵アクチュエータ40を制御するための信号を生成し、生成した制御信号を操舵アクチュエータ40へ出力する機能を有している。なお、操舵アクチュエータ40は、車両の走行を制御する機械的な構成要素であり、例えば、操舵角制御モータ等が用いられる。
【0029】
次に、第1実施形態に係る走行制御部1の動作について説明する。図2,3は、第1実施形態に係る走行制御部1の動作を示すフローチャートである。図2,3に示す制御処理は、例えばイグニッションオン又は車両5に備わる開始ボタンがオンされてから、所定のタイミングで繰り返し実行される。
【0030】
図2に示すように、走行制御部1は初期速度パターン生成処理から開始する(S10)。S10の処理は、目標速度パターン生成部10が実行し、初期速度パターンを生成する処理である。目標速度パターン生成部10は、例えば、操作部32により取得した目的地と、ナビゲーションシステム33が出力した地図情報等に基づいて、目的地までの行程を複数の区間に分割する。そして、例えば、重視する項目を評価する項を含む評価関数を用いて最適化処理により初期速度パターンを生成する。以下では説明理解の容易性を考慮して、低燃費速度パターンを生成する例を説明する。目標速度パターン生成部10は、例えば、ECU2のメモリに格納された車両情報を入力して拘束条件を設定する。車両情報として、例えば、車両加速性能、車両減速性能、車重、許容最大加速度、許容最大減速度、許容最大ジャーク、最高速度、最大横加速度、最大ハンドル角速度、最小定常速度、最小定常加速度、最小定常ジャーク、加減速時の加減速変化回数、緊急ブレーキ性能、故障判定時間、速度制御誤差、位置制御誤差が用いられる。これらの値は、諸元情報や、操作部32から入力された運転者の要望、学習等により設定される。
【0031】
次に、旅行時間とエンジン出力熱効率を評価する項を含む評価関数とを用いた最適化処理により、低燃費な初期速度パターンを生成する。生成された初期速度パターンの一例を図4(a)に示す。図4に示すグラフは、横軸が時間、縦軸が速度で示された速度パターンである。図4(a)に示す速度パターンは、車両5が発進して停止するまで、例えば青点灯による発進時刻t0から赤点灯による停止時刻t6までの短い時間の速度パターンである。このような速度パターンを繋げることによって目的地までの速度パターンが完成する。図4(a)では、時刻t0から時刻t1までの加速区間T1、時刻t1から時刻t3までの波状走行区間T2、時刻t3から時刻t5までの波状走行区間T3、時刻t5から時刻t6まで減速区間T4の4つの区間に分割して低燃費な速度パターンを生成している。波状走行区間T2、T3内には減速区間T2a、T3aと加速区間T2b、T3bが含まれており、波状走行区間が連続することにより、減速区間と加速区間が交互に繰り返されている。減速区間T2a、T3a、T4での走行は、いわゆる滑空走行であり、エンジン42は停止している。目標速度パターン生成部10が速度パターンを生成すると、S10の処理は終了し、SOC確認処理へ移行する(S12)。
【0032】
S12の処理は、目標速度パターン再生成部11が実行し、バッテリ44のSOCが不足しているか否かを判定する処理である。目標速度パターン再生成部11は、例えば、センサ31から入力したSOCが不足基準値以下であるかを判定する。不足基準値として例えば40%が用いられる。S12の処理において、SOCが不足していないと判定した場合には、通常走行制御処理へ移行する(S14)。
【0033】
S14の処理は、ECU2が実行し、通常の速度制御処理を行う処理である。通常の速度制御処理は、バッテリ44のSOCを考慮せずに、操舵制御及び加減速制御を行う処理である。例えば低燃費走行をする場合には、燃費に最も良い車速や加速度等を演算して制御する。また、S10の処理で設定した初期速度パターンを採用して走行してもよい。S14の処理が終了すると、図2,3に示す制御処理は終了する。
【0034】
一方、S12の処理において、SOCが不足していると判定した場合には、フル回生状態判定処理へ移行する(S16)。S16の処理は、ハイブリットシステム4が実行し、フル回生状態であるか否かを判定する処理である。目標速度パターン再生成部11は、例えば図4(a)に示す初期速度パターンの減速区間T2a、T3a、T4において、ハイブリットシステム4によりその速度で許容されている最大の減速度で減速するか否かを判定することで、フル回生状態であるか否かを判定する。この最大の減速度は、バッテリ44の入力密度限界となる回生、すなわちフル回生が行われる減速度であり、例えば−0.2Gが用いられる。S16の処理において、フル回生状態であると判定した場合には、第1充電速度パターン生成処理へ移行する(S18)。
【0035】
S18の処理は、目標速度パターン再生成部11が実行し、目標速度パターンを再生成する処理である。目標速度パターン再生成部11は、初期速度パターンの加速区間T1、T2b、T3bにおいてエンジン42の出力を増加し、初期速度パターンの減速区間T2a、T3a、T4において滑空走行でなく回生制御による減速を行うように速度パターン(第1充電速度パターン)を再生成する。エンジン42の出力の増加量は、ハイブリットシステム4の通常のHV制御により決定され、例えばSOCが基準値となるように設定される。生成した第1充電速度パターンの例を図4(b)に示す。図4(b)は、図4(a)と同一の座標系であり、図4(a)に示す初期速度パターンに基づいてS18の処理において再生成したものである。図4(b)に示すように、加速区間T1、T2b、T3bにおいてエンジン42の出力を増加して加速区間の最終速度をv2からv3へ増加している。このように、SOCが不足してエンジン42が充電のために停止できないことが予測される場合には、充電タイミングを制御するためにエンジン42が駆動する加速区間T1、T2b、T3bにおいて速度を上げて、減速区間T2a、T3a、T4で回生制御をすることができる。これにより、エンジン42を停止する減速区間T2a、T3a、T4でエンジン42を停止できないという事態が発生することを回避できる。また、加速区間T1、T2b、T3bにおいて加速し速度を上げているので、区間を距離で規定した場合には、加速区間の最終に到達するまでの時間を短縮することができる。このため、短縮した分の時間を減速区間T2a、T3a、T4の走行時間に割り当てることができる。すなわち、エンジン42を駆動する場合には速く移動し、エンジン42を停止する場合には時間を掛けて移動することにより、燃費の良いエンジン42停止走行に時間を掛けることができるので、燃費向上を図ることが可能となる。S18の処理が終了すると、SOC不足量確認処理へ移行する(S20)。
【0036】
S20の処理は、ECU2が実行し、SOCが著しく不足しているか否かを判定する処理である。ECU2は、現状のSOCと不足基準値との差からSOC不足量を算出し、SOCの不足量が所定値以下か否かを判定することで、SOCが著しく不足しているか否かを判定する。所定値として、例えば30%が用いられる。S20の処理において、SOC不足量が所定値以下と判定した場合、すなわち、SOCが著しく不足していないと判定した場合には、信号機判定処理へ移行する(S22)。
【0037】
S22の処理は、ECU2が実行し、ナビゲーションシステム33が出力した交通情報に基づいて、S10の処理で生成した初期速度パターンを採用した場合に直前の信号を通過できるか否か、S18の処理で生成した第1充電速度パターンを採用した場合に直前の信号を通過できるか否かを判定する処理である。交通情報には、例えば点灯色の切換時刻が含まれたものが用いられる。S22の処理において、初期速度パターンを採用すると赤信号で初期速度パターンを採用することで直前の信号を通過できると判定した場合、あるいはどの速度パターンでも信号機で停止することが避けられない場合には、初期速度パターン採用処理へ移行する(S24)。
【0038】
S24の処理は、車両運動制御部12が実行し、S10の処理で生成した初期速度パターンを採用して走行する処理である。このように、SOC不足量が著しくない場合には、なるべくバッテリ44への充電を控えることにより、充電によるエネルギーロスを回避することができる。S24の処理が終了すると、図2,3に示す制御処理を終了する。
【0039】
一方、S20の処理において、SOCが著しく不足していると判定した場合には、第1充電速度パターン採用処理へ移行する(S26)。S26の処理は、車両運動制御部12が実行し、S18の処理で生成した第1充電速度パターンを採用して走行する処理である。S26の処理が終了すると、図2,3に示す制御処理は終了する。
【0040】
また、S22の処理において、初期速度パターンを採用した場合に、直前の信号を通過できず、かつ、第1充電速度パターンを採用した場合に直前の信号を通過することができる場合には、旅行時間を優先して第1充電速度パターン採用処理へ移行する(S26)。
【0041】
また、S16の処理において、フル回生状態でないと判定した場合には、フル回生速度パターン生成処理へ移行する(図3のS28)。S28の処理は、目標速度パターン再生成部11が実行し、減速区間全体をフル回生状態にした場合の速度パターン(フル回生速度パターン)を生成する処理である。例えば、図4(a)における減速区間T2a、T3a、T4において、バッテリ44の入力密度限界の回生を行う減加速で減速するように目標速度パターンを生成する。目標速度パターンの生成に必要な情報及び手法は、S10の処理と同様である。S28の処理が終了すると、エネルギー演算処理へ移行する(S30)。
【0042】
S30の処理は、ECU2が実行し、各区間の回生エネルギーを演算する処理である。まず、ECU2は、フル回生速度パターンを採用した場合における、減速区間全体の回生エネルギーUを演算する。ここで、車両質量をm、減速区間の初速度をVs、減速区間の終速度(加速区間の初速度)をVe、回生減速度をak1、フル回生減速度をafとすると、各区間の回生エネルギーをUn(n:整数)は、以下の式1のように表される。
【0043】
Un=m・(Vs2−Ve2)・ak1/af …(1)
【0044】
減速区間全体の回生エネルギーUは、各区間の回生エネルギーUnの総和で求めることができる。なお、車両質量mは、例えば諸元情報に基づいて事前に設定される。次に、ECU2は初期速度パターンを採用した場合における、減速区間全体の回生エネルギーUsを演算する。ここで、車両質量をm、減速区間の初速度をV2、減速区間の終速度(加速区間の初速度)をV1、回生減速度をak2、フル回生減速度をafとすると、各区間の回生エネルギーをUsn(n:整数)は、以下の式2のように表される。
【0045】
Usn=m・(V22−V12)・ak2/af …(2)
【0046】
減速区間全体の回生エネルギーUsは、各区間の回生エネルギーUsnの総和で求めることができる。次に、ECU2は、増加見込みエネルギーUzを演算する。増加見込みエネルギーUzは、仮にフル回生状態にした場合、増加するエネルギーを示すものである。この増加見込みエネルギーUzは、以下の式3のように表される。
【0047】
Uz=U−Us …(3)
【0048】
次に、ECU2は、SOC余剰見込みエネルギーUuを演算する。SOC余剰見込みエネルギーUuは、増加見込みエネルギーでSOC不足量Eを補った後に余剰するエネルギーを示すものである。このSOC余剰見込みエネルギーUuは、以下の式4のように表される。
【0049】
Uu=Uz−E …(4)
【0050】
ECU2はSOC余剰見込みエネルギーUuを算出すると、S30の処理を終了し、充電予測判定処理へ移行する(S32)。
【0051】
S32の処理は、ECU2が実行し、SOCを目標SOCまで回復させることができるか否かを判定する処理である。目標SOCは予め設定した所定値であり、例えば50%である。ECU2は、式4を用いて演算したSOC余剰見込みエネルギーUuが負の場合には、目標SOCまで充電することができないと判定し、第2充電速度パターン生成処理へ移行する(S34)。
【0052】
S34の処理は、目標速度パターン再生成部11が実行し、目標速度パターンを再生成する処理である。この処理は、S18の処理と同様であり、第1充電速度パターンと同様の第2速度パターンを再生成する。S34の処理が終了すると、SOC不足量確認処理へ移行する(S36)。
【0053】
S36の処理は、ECU2が実行し、SOCが著しく不足しているか否かを判定する処理である。この処理はS20の処理と同様である。S36の処理において、SOCが著しく不足していないと判定した場合には、信号機判定処理へ移行する(S38)。
【0054】
S38の処理は、ECU2が実行し、ナビゲーションシステム33が出力した交通情報に基づいて、S10の処理で生成した初期速度パターンを採用した場合に直前の信号を通過できるか否か、S34の処理で生成した第2充電速度パターンを採用した場合に直前の信号を通過できるか否かを判定する処理である。この処理はS22の処理と同様である。S38の処理において、初期速度パターンを採用すると赤信号で初期速度パターンを採用することで直前の信号を通過できると判定した場合、あるいはどの速度パターンでも信号機で停止することが避けられない場合には、初期速度パターン採用処理へ移行する(S40)。
【0055】
S40の処理は、車両運動制御部12が実行し、S10の処理で生成した初期速度パターンを採用して走行する処理である。このように、SOCの不足が著しくない場合には、なるべくバッテリ44への充電を控えることにより、充電によるエネルギーロスを回避することができる。S40の処理が終了すると、図2,3に示す制御処理を終了する。
【0056】
一方、S36の処理において、SOCが著しく不足していると判定した場合には、第2充電速度パターン採用処理へ移行する(S42)。S42の処理は、車両運動制御部12が実行し、S34の処理で生成した第2充電速度パターンを採用して走行する処理である。S42の処理が終了すると、図2,3に示す制御処理は終了する。
【0057】
また、S38の処理において、初期速度パターンを採用した場合に、直前の信号を通過できず、かつ、第2充電速度パターンを採用した場合に直前の信号を通過することができる場合には、旅行時間を優先して第2充電速度パターン採用処理へ移行する(S42)。
【0058】
また、S32の処理において、式4を用いて演算したSOC余剰見込みエネルギーUuが正の場合には、目標SOCまで充電することができると判断し、フル回生速度パターン採用処理へ移行する(S44)。S44の処理は、車両運動制御部12が実行し、S28の処理で生成したフル回生速度パターンを採用して走行する処理である。S44の処理が終了すると、図2,3に示す制御処理は終了する。
【0059】
以上で図2,3に示す制御処理を終了する。図2,3に示す制御処理を実行することで、SOCの不足状態に起因した動作による燃費低下を回避することができる。例えば、従来であれば、図4(a)に示すように波状走行する予定であっても、SOCが不足することにより、滑空走行の予定の区間T2a、T3a、T4においてエンジン42が強制始動する場合がある。このため、計画通りの走行を行うことができない場合がある。これに対して、第1実施形態に係る走行制御部1は、所定の速度パターンを生成後、バッテリ44のSOCが不足基準値以下となる予定の場合には、例えば図4(b)に示すように、区間T1、T2b、T3bの加速を大きくするように速度パターンを再生成する。このため、加速区間において増加した加速により車速を上昇させて加速区間の運動エネルギーを大きくすることができる。そして、増加した運動エネルギーを回生によりバッテリ44に充電することができる。このように、バッテリ44のSOCの不足を補うために必要な運動エネルギーの生成タイミングを制御することで、例えばエンジン42停止走行をする予定の走行区間において充電のためにエンジン42を駆動しなければならない事態が発生することを回避することができる。このため、バッテリ44のSOCが不足していても予定通りの走行を行うことができるので、SOC不足状態に起因した動作により燃費が低下することを回避することが可能となる。さらに、減速の際に回生制御による減速を行うように速度パターンを再生成することで、バッテリ44の充電タイミングを制御し、加速中に充電する場合、すなわち力学エネルギー発生と同時に電気エネルギーに変換する場合に比べて目的地までの平均速度を大きくすることができる。このため、加速に必要な時間t0〜t1、t2〜t3、t4〜t5を短縮し、短縮した時間をエンジン42停止による走行時間t1〜t2、t3〜t4、t5〜t6に割り当てることで、エンジン42停止時間をt6〜t2、t8〜t4、t9〜t6と伸ばすことができる。これにより、停止時刻(到着時刻)t6に間に合いつつ燃費向上を図ることが可能となる。
【0060】
(第2実施形態)
第2実施形態に係る走行制御装置(走行制御部)は、第1実施形態に係る走行制御部1とほぼ同様に構成されるものであって、走行制御部1と比べ、SOCの超過を考慮した速度パターンを再生成する点が相違する。なお、第2実施形態においては、第1実施形態と重複する部分は説明を省略し、相違点を中心に説明する。
【0061】
本実施形態に係る走行制御部を備えた車両の構成は、第1実施形態に係る走行制御部1を備えた車両と同様である。また、本実施形態に係る走行制御部は、第1実施形態に係る走行制御部1とほぼ同様に構成され、目標速度パターン再生成部11が有する機能の一部が相違する。
【0062】
目標速度パターン再生成部11は、目標速度パターン生成部10が生成した初期速度パターンを再生成する機能を有している。例えば、バッテリ44のSOCが超過基準値(第2の所定値)以上の場合には、初期速度パターンに基づいて減速する減速区間においてモータ43を駆動させてバッテリ44の放電を行う目標速度パターン(充電速度パターン)を再生成する機能を有している。ここで、超過基準値は不足基準値よりも大きく、例えばバッテリ44のSOC目標値から許容される超過量を加算した値が設定される。超過基準値として、例えば70%が用いられる。また、目標速度パターン再生成部11は、センサ31やナビゲーションシステム33に基づいて後続車両が存在するか否かを判定し、モータ43駆動による放電を、後続車両が存在しない区間よりも後続車両が存在する区間で優先的に行う目標速度パターンを再生成する機能を有している。ここで、モータ43を駆動するためにする放電の電気量は、ハイブリットシステム4の通常のHV制御により決定される。なお、その他の機能は第1実施形態に係る目標速度パターン再生成部11と同様である。
【0063】
次に、第2実施形態に係る走行制御部の動作について説明する。図5,6は、第2実施形態に係る走行制御部の動作を示すフローチャートである。図5,6に示す制御処理は、例えばイグニッションオン又は車両5に備わる開始ボタンがオンされてから、所定のタイミングで繰り返し実行される。
【0064】
図5に示す制御処理が開始されると、走行制御部は、初期速度パターン生成処理から開始する(S50)。S50の処理は、目標速度パターン生成部10が実行し、初期速度パターンを生成する処理である。この処理は、図2のS10の処理と同様であり、例えば図7(a)に示すような速度パターンが生成される。S50の処理が終了すると、SOC確認処理へ移行する(S52)。
【0065】
S52の処理は、目標速度パターン再生成部11が実行し、バッテリ44のSOCが超過しているか否かを判定する処理である。目標速度パターン再生成部11は、例えば、センサ31から入力したSOCが超過基準値以上であるかを判定する。超過基準値として、例えば70%が用いられる。S12の処理において、SOCが超過していないと判定した場合には、通常走行制御処理へ移行する(S68)。
【0066】
S68の処理は、ECU2が実行し、通常の速度制御処理を行う処理である。通常の速度制御処理は、バッテリ44のSOCを考慮せずに、操舵制御及び加減速制御を行う処理である。例えば低燃費走行をする場合には、燃費に最も良い車速や加速度等を演算して制御する。また、S50の処理で設定した初期速度パターンを採用して走行してもよい。S68の処理が終了すると、図5,6に示す制御処理は終了する。
【0067】
一方、S52の処理において、SOCが超過していると判定した場合には、波状走行判定処理へ移行する(S54)。S54の処理は、目標速度パターン再生成部11が実行し、波状走行中であるか否かを判定する処理である。例えば、図7(a)に示す初期速度パターンにおいて、区間T2、T3は波状走行する区間であり、発進加速を実行している区間T1や減速停止を実行している区間T4は波状走行する区間ではないと判定する。S54の処理において、波状走行中でないと判定した場合には、通常走行制御処理へ移行する(S68)。このように、SOCが超過していても、加速中であればエンジン42の出力を直接駆動力とするため、エネルギー変換によるロスを少なくして効率の良く走行できる。一方、S54の処理において、波状走行中であると判定した場合には、車間距離確認処理へ移行する(S56)。
【0068】
S56の処理は、目標速度パターン再生成部11が実行し、後続車両との車間距離が長いか否かを判定する処理である。ECU2は、例えば、センサ31やナビゲーションシステム33から後続車両の情報を入力し、波状走行区間T2、T3において後続車両との車間距離が所定値より大きいか否かを判定する。所定値には例えば100mが用いられる。S56の処理において、後続車両との車間距離が長いと判定した場合には、加速判定処理へ移行する(S58)。
【0069】
S58の処理は、目標速度パターン再生成部11が実行し、加速中であるか否かを判定する処理である。ECU2は、波状走行区間T2、T3において、加速区間T2b、T3bを走行している場合には加速中であると判定し、減速区間T2a、T3aを走行している場合には、減速中であると判定する。S58の処理において、加速中でないと判定した場合には、通常走行制御処理へ移行する(S68)。このように、SOCが超過していても、加速中であればエンジン42の出力を直接駆動力とするため、エネルギー変換によるロスを少なくして効率の良く走行できる。一方、S58の処理において、加速中でないと判定した場合には、定速速度パターン生成処理へ移行する(S60)。
【0070】
S60の処理は、目標速度パターン再生成部11が実行し、定速速度パターンを生成する処理である。目標速度パターン再生成部11は、例えばS50の処理で生成した初期速度パターンにおける減速区間T2a、T3aにおいて区間T2、T3が一定速度となるように、モータ43を駆動させて走行する場合の定速速度パターンを生成する。S60の処理が終了すると、最終SOC確認処理へ移行する(S62)。
【0071】
S62の処理は、ECU2が実行し、最終停止地点でのSOCが目標充電量以下であるか否かを判定する処理である。ECU2は、モータ43を駆動させて走行した場合の停止時刻t6でのSOCが目標充電量以下であるか否かを判定する。目標充電量は所定値であり、例えば50%が用いられる。S62の処理において、目標充電量以下であると判定した場合には、初期速度パターン採用処理へ移行する(S64)。
【0072】
S64の処理は、車両運動制御部12が実行し、S50の処理で生成した初期速度パターンを採用して走行する処理である。車両運動制御部12は、停止地点で目標充電量以下となる場合には、例えば波状走行する初期速度パターンを採用して走行を行う。このように、モータ43駆動による放電によって停止地点で目標充電量以下になってしまうとSOCの充電が再度必要となるので、モータ43駆動による放電を行わない初期速度パターンを採用することにより、充電によるエネルギー変換ロスの発生を回避することができる。S64の処理が終了すると、図5,6に示す制御処理を終了する。
【0073】
一方、S62の処理において、目標充電量以下でないと判定した場合には、定速速度パターン採用処理へ移行する(S66)。S66の処理は、車両運動制御部12が実行し、S60の処理で生成した定速速度パターンを採用する処理である。このように、すべての減速区間T2a、T3aでモータ43駆動により放電しても最終停止地点において目標充電量を満たしていればSOCの充電が再度必要となる事態が即座に発生することがないので、定速速度パターンを採用する。S66の処理が終了すると、図5,6に示す制御処理を終了する。
【0074】
また、S56の処理において、後続車両との車間距離が長くないと判定した場合には、定速速度パターン生成処理へ移行する(図6のS70)。S70の処理は、目標速度パターン再生成部11が実行し、定速速度パターンを生成する処理である。この処理はS60の処理と同様である。定速速度パターンを生成すると、S70の処理は終了し、最終SOC確認処理へ移行する(S72)。
【0075】
S72の処理は、ECU2が実行し、最終停止地点でのSOCが目標充電量以下であるか否かを判定する処理である。この処理はS62の処理と同様である。S72の処理において、最終停止地点でのSOCが目標充電量以下であると判定した場合には、放電速度パターン生成処理へ移行する(S74)。
【0076】
S74の処理は、目標速度パターン再生成部11が実行し、放電速度パターンを生成する処理である。目標速度パターン再生成部11は、例えば、S50の処理で生成した速度パターンの減速区間T2a、T3aにおいて定速走行(加速度0)を上限として、後続車両との車間距離に応じてモータ43駆動による放電によって減速緩和した速度パターンを生成する。まず、目標速度パターン再生成部11は、各区間の放電電力から算出する。ここで、最大放電電力をWm、後続車間係数をKcとすると、バッテリ44の放電電力Hは、例えば以下の式5のように表される。
【0077】
H=Wm・Kc …(5)
【0078】
後続車間係数Kcは、例えば後続車両との車間距離が30mより小さい場合には1が設定され、後続車両との車間距離が30〜100mの場合には、線形補完によって求めた値が設定される。すなわち、車間距離をHcとすると、後続車間係数Kcは、例えば以下の式6のように表される。
【0079】
Kc=1−{(Hc−30)/(100−30)} …(6)
【0080】
次に、目標速度パターン再生成部11は、求めた放電電力Hに基づいて速度パターンを生成する。例えば、区間T2では後続車両との車間距離が44m、区間T3では後続車両との車間距離が20mであるとする。すると、後続車両との車間距離が短い区間T3aでの放電電力Hは、式5より最大放電電力Wmで実行され、区間T3は一定速度となる。一方、後続車両との車間距離が長い区間T3aでの放電電力Hは、式6より後続車間係数Kcが0.2であるので、式5より0.8Wmとなる。これにより、例えば図7(b)に示すように、後続車両との車間距離に応じてモータ43駆動により放電する区間を変更する放電速度パターンを生成することができる。S74の処理が終了すると、放電速度パターン採用処理へ移行する(S76)。
【0081】
S76の処理は、車両運動制御部12が実行し、S74の処理で生成した放電速度パターンを採用して走行する処理である。S76の処理が終了すると、図5,6に示す制御処理を終了する。
【0082】
一方、S72の処理において、最終停止地点でのSOCが目標充電量以下でないと判定した場合には、定速速度パターン採用処理へ移行する(78)。S78の処理は、車両運動制御部12が実行し、S70の処理で生成した定速速度パターンを採用して走行する処理である。このように、すべての減速区間T2a、T3aでモータ43駆動により放電しても最終停止地点において目標充電量を満たしていればSOCの充電が再度必要となる事態が即座に発生することがないので、定速速度パターンを採用する。S78の処理が終了すると、図5,6に示す制御処理を終了する。
【0083】
以上で図5,6に示す制御処理を終了する。図5,6に示す制御処理を実行することで、SOCの超過状態を回避するためにモータ43駆動により放電するタイミングを制御して燃費向上を図ることができる。
【0084】
ところで、従来の走行制御装置であれば、図7(a)に示すように波状走行する予定であっても、SOCが超過した時点でモータ43駆動により放電を行う場合がある。ハイブリットシステム4において、力学エネルギーと電気エネルギーを変換するだけでエネルギーロスが生じるため、バッテリ44からの放電はエネルギーロスとなる。このため、変換によるエネルギーロスにより非効率な走行となる場合がある。
【0085】
これに対して、第2実施形態に係る走行制御部によれば、所定の速度パターンを生成後、バッテリ44が満充電状態となることを回避するためにバッテリ44のSOCをモータ43駆動による放電によって減少させる場合には、例えば図7(b)に示すように、放電タイミングを制御して減速区間T2a、T2bを走行する際に行わせることができる。これにより、例えば、加速と減速とを繰り返す低燃費な目標速度パターンをなだらかな目標速度パターンとすることができるので、乗り心地を向上することが可能となる。さらに、放電タイミングを制御することで、バッテリ44が満充電状態となることを回避し、回生制御により得られる電気エネルギーをバッテリ44に無駄なく充電することができる。
【0086】
また、第2実施形態に係る走行制御部によれば、モータ43駆動による放電によってバッテリ44のSOCを減少させる場合には、後続車両が近くに存在する区間T3aで優先的にモータ43を駆動するため、後続車両の走行に影響を与えやすい波状走行を定速走行に近づけることができる。また、後続車両の走行に影響を与えやすい低速走行の速度を上げることができる。このため、低燃費走行を実行しつつ交通流の妨げになることを回避することができる。
【0087】
(第3実施形態)
第3実施形態に係る走行制御装置(走行制御部)は、第1実施形態に係る走行制御部1とほぼ同様に構成されるものであって、走行制御部1と比べ、目標とした速度パターンを低燃費に制御することができる機能を有する点が相違する。なお、第3実施形態においては、第1実施形態と重複する部分は説明を省略し、相違点を中心に説明する。
【0088】
本実施形態に係る走行制御部を備えた車両の構成は、第1実施形態に係る走行制御部1を備えた車両と同様である。また、本実施形態に係る走行制御部は、第1実施形態に係る走行制御部1とほぼ同様に構成され、車両運動制御部12が有する機能の一部が相違する。
【0089】
車両運動制御部12は、目標速度パターンにより規定された各区間での目標速度に基づいた走行制御を行う際に、エンジン42の動作状態情報、車速と目標速度との差を示す速度超過不足情報、及び、バッテリ44のSOCと目標SOCとの差を示すSOC過不足情報に基づいてフィードバック制御を行う機能を有している。その他の機能については、第1実施形態と同様である。
【0090】
次に、第3実施形態に係る走行制御部の動作について説明する。図8〜11は、第3実施形態に係る走行制御部の動作を示すフローチャートである。図8〜11に示す制御処理は、例えばイグニッションオン又は車両5に備わる開始ボタンがオンされてから、所定のタイミングで繰り返し実行される。
【0091】
図8に示す制御処理が開始されると、走行制御部は、速度パターン生成処理から開始する(S80)。S80の処理は、目標速度パターン生成部10が実行し、速度パターンを生成する処理である。この処理は、図2のS10の処理と同様であり、例えば図4(a)に示すような速度パターンが生成される。以下ではこの目標速度パターンに沿って車両制御を実行する。S80の処理が終了すると、速度誤差確認処理へ移行する(S82)。
【0092】
S82の処理は、車両運動制御部12が実行し、速度誤差を算出する処理である。車両運動制御部12は、センサ31が取得した車速と、S80の処理で生成した速度パターンの目標車速との差を算出し速度誤差とする。S82の処理が終了すると、誤差判定処理へ移行する(S84)。
【0093】
S84の処理は、車両運動制御部12が実行し、速度誤差の大きさを判定する処理である。車両運動制御部12は、S82の処理で算出した速度誤差の絶対値が所定値以上か否かを判定する。所定値として、例えば0.3km/hが用いられる。S84の処理において、速度誤差が大きくないと判定した場合には、車速を変更する必要がないので、図8〜11までの処理を終了する。一方、S84の処理において、速度誤差が大きいと判定した場合には、エンジン42状態確認処理へ移行する(S86)。
【0094】
S86の処理は、車両運動制御部12が実行し、エンジン42状態が停止しているか否かを判定する処理である。車両運動制御部12は、例えば減速中であったり、滑空走行中である場合にはエンジン42停止中であると判定する。S86の処理において、エンジン42停止中であると判定した場合には、フィードバックパラメータ変更処理へ移行する(S88)。
【0095】
S88の処理は、車両運動制御部12が実行し、実速度を目標速度とするためのフィードバック制御のパラメータを変更する処理である。この処理の詳細は後述する。S88の処理が終了すると、指示加速度演算処理へ移行する(S90)。
【0096】
S90の処理は、車両運動制御部12が実行し、一般的な速度フィードバック制御を行う。車両運動制御部12は、例えば、S80の処理で生成した速度パターンの微分を求めて目標加速度amとする。そして、速度誤差をVh、比例ゲイン(Pゲイン)をPとすると、指示加速度ahは以下の式7で表すことができる。
【0097】
ah=am+Vh・P
【0098】
このように、車両運動制御部12は、得られた目標加速度amをフィードバック項として速度誤差に対して比例ゲイン(Pゲイン)のフィードバック項を加える制御を行う。比例ゲインPは、基本ゲインとして所定値P0が設定される。そして、車両運動制御部12は、所定の条件を満たす場合には、後述するS88の処理及びS96の処理において比例ゲインPを変更する。S90の処理が終了すると、制御継続確認処理へ移行する(S92)。
【0099】
S92の処理は、車両運動制御部12が実行し、フィードバック制御が継続しているか否かを判定する処理である。S92の処理において、フィードバック制御が終了していると判定した場合には、図8〜11に示す制御処理を終了する。一方、S92の処理において、フィードバック制御が終了していないと判定した場合には、速度誤差算出処理へ再度移行する(S82)。
【0100】
また、S86の処理において、エンジン42停止中であると判定した場合には、エンジン42状態判定処理へ移行する(S94)。S94の処理は、車両運動制御部12が実行し、エンジン42が動作しているか否かを判定する処理である。車両運動制御部12は、例えばエンジン42動作中でないと判定した場合には、指示加速度演算処理へ移行する(S90)。一方、加速中である場合等、エンジン42動作中であると判定した場合には、フィードバックパラメータ変更処理へ移行する(S96)。
【0101】
S96の処理は、車両運動制御部12が実行し、実速度を目標速度とするためのフィードバック制御のパラメータを変更する処理である。この処理の詳細は後述する。S96の処理が終了すると、指示加速度演算処理へ移行する(S90)。
【0102】
以上で、図8に示す制御処理を終了する。次に、図8のS88の処理であるエンジン42停止中のフィードバックパラメータ変更処理の詳細を図9を用いて説明する。
【0103】
図9に示す制御処理は、図8のS86の処理において、エンジン42停止状態と判定した場合に実行する。まず、速度判定処理から開始する(S100)。S100の処理は、車両運動制御部12が実行し、速度超過状態であるか否かを判定する処理である。車両運動制御部12は、例えば速度誤差が正であり、所定値以上であるか否かを判定する。所定値として、例えば0.3km/hが用いられる。S100の処理において、速度超過状態であると判定した場合には、バッテリ44のSOC状態及び回生状態判定処理へ移行する(S102)。
【0104】
S102の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態とハイブリットシステム4の回生状態を判定する処理である。車両運動制御部12は、センサ31からバッテリ44のSOCを確認し、不足基準値以下であるか否かを判定する。不足基準値として、例えば40%が用いられる。次に、車両運動制御部12は、センサ31から車速を入力し、ハイブリットシステム4における速度ごとの回生限界(フル回生状態)となっているかを確認する。S102の処理において、SOCが不足基準値以下すなわち不足している場合であって、フル回生状態でない場合には、比例ゲイン変更処理へ移行する(S108)。
【0105】
S108の処理は、車両運動制御部12が実行し、比例ゲインPを大きくする処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、SOCが不足しており、回生能力に余力がある場合には比例ゲインPを大きく設定する。S108の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を大きくすることができる。よって、SOCが不足している場合には、減速中や滑空走行中のようなエンジン42停止中の速度超過に関して積極的に回生が行えるようにフィードバック制御を変更することができるので、燃費向上を図ることができる。
【0106】
一方、S102の処理において、SOCが不足している場合であってフル回生状態である場合、あるいはSOCが不足基準値以上の場合には、SOC状態確認処理へ移行する(S104)。S104の処理は、車両運動制御部12が実行し、SOCが超過状態であるか否かを判定する処理である。車両運動制御部12は、例えばSOCが超過基準値以上であるか否かを判定する。超過基準値として、例えば60%が用いられる。S104の処理において、SOCが超過状態であると判定した場合には、比例ゲイン変更処理へ移行する(S106)。
【0107】
S106の処理は、車両運動制御部12が実行し、比例ゲインPを小さくする処理である。例えば、基本ゲインP0を0.5倍した値を比例ゲインPに設定する。このように、SOCが超過状態であって回生能力が限界である場合には、比例ゲインPを小さく設定する。S106の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、減少させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を小さくすることができる。よって、SOCが超過状態であって回生能力が限界である場合には、滑空走行のようなエンジン42停止状態を優先し、回生力が増えないようにフィードバック制御を変更することができるので、燃費向上を図ることができる。
【0108】
一方、S104の処理において、SOCが超過状態でないと判定した場合には、SOCが不足しているがフル回生状態であり、あるいはSOCが理想的な状態であるので、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。
【0109】
また、S100の処理において、速度超過状態でないと判定した場合には、速度判定処理へ移行する(S110)。S110の処理は、車両運動制御部12が実行し、車速が不足しているか否かを判定する処理である。車両運動制御部12は、センサ31から入力した車速が所定値以下であるか否かを判定する。所定値として、例えば−0.3km/hが用いられる。S110の処理において、速度不足状態でないと判定した場合には、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。一方、S110の処理において、速度不足状態であると判定した場合には、SOC状態判定処理へ移行する(S112)。
【0110】
S112の処理は、車両運動制御部12が実行し、SOCが不足しているか否かを判定する処理である。この判定処理は、S102のSOC判定処理と同様である。S112の処理において、SOCが不足していないと判定した場合には、SOC超過判定処理へ移行する(S114)。
【0111】
S114の処理は、車両運動制御部12が実行し、SOCが超過しているか否かを判定する処理である。この処理は、S104の処理と同様である。S114の処理において、SOCが超過していないと判定した場合には、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。一方、S114の処理において、SOCが超過していると判定した場合には、放電電力判定処理へ移行する(S116)。
【0112】
S116の処理は、車両運動制御部12が実行し、加速に用いる放電が電池出力限界であるか否かを判定する処理である。S116の処理において、放電が最大電力である場合には、特に比例ゲインの変更を行わずに図9に示す制御処理を終了する。一方、S116の処理において、放電が最大電力でない場合には、比例ゲイン変更処理へ移行する(S118)。
【0113】
S118の処理は、車両運動制御部12が実行し、比例ゲインPを大きくする処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、速度が不足しており、かつSOCが超過している場合には比例ゲインPを大きく設定する。S118の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、放電加速度を大きくすることができる。よって、エンジン42停止中に速度が不足してSOCが超過している場合には放電を大きくするようにフィードバック制御を変更することができるので、効率的にエネルギーを使用することができる。
【0114】
一方、S112の処理において、SOCが不足していると判定した場合には、比例ゲイン変更処理へ移行する(S120)。S120の処理は、車両運動制御部12が実行し、比例ゲインPを大きくするとともに、エンジン42を始動する処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、速度が不足しており、かつSOCが不足している場合には、比例ゲインPを大きく設定するとともにエンジン42を始動する。S120の処理が終了すると、図9に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、加速度を大きくすることができる。このため、速度が不足してSOCが不足している場合にはエンジン42の出力を大きくするようにフィードバック制御を変更することができるので、速度超過を誘発させることができる。エンジン42を始動させた場合には、エネルギー変換ロスを考慮して充電は行わずに、速度超過が発生した際に回生を行うように制御する。これにより、燃費向上を図ることができる。
【0115】
以上で、図9に示す制御処理を終了する。次に、図8のS96の処理であるエンジン42動作中のフィードバックパラメータ変更処理の詳細を図10,11を用いて説明する。
【0116】
図10に示す制御処理は、図8のS94の処理において、エンジン42動作状態と判定した場合に実行する。まず、速度判定処理から開始する(S130)。S130の処理は、車両運動制御部12が実行し、速度超過状態であるか否かを判定する処理である。この処理は図9のS104の処理と同様である。S130の処理において、速度超過状態であると判定した場合には、バッテリ44のSOC状態及び速度超過量判定処理へ移行する(S132)。
【0117】
S132の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態とS130の処理で判定した速度超過量を判定する処理である。SOC状態を確認する処理は、図9のS102の処理と同様である。また、車両運動制御部12は、S130の処理で演算した速度超過量が所定値未満の小さな超過量であるか否かを判定する。所定値として、例えば1km/hが用いられる。S132の処理において、SOCが不足している場合であって、小さな速度超過量である場合には、比例ゲイン変更処理へ移行する(S142)。
【0118】
S142の処理は、車両運動制御部12が実行し、比例ゲインPを小さくする処理である。例えば、基本ゲインP0を0.5倍した値を比例ゲインPに設定する。このように、SOCが不足状態であっても、速度超過が小さい場合には比例ゲインPを小さく設定する。S142の処理が終了すると、図10に示す制御処理を終了する。これにより、図8のS90の処理において、減少させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を小さくすることができる。よって、SOCが不足状態であって小さな速度超過である場合には、エンジン42加速を継続した制御を行い、速度超過を誘発させる制御を行うことができる。
【0119】
一方、S132の処理において、SOCが不足し速度超過が小さくないと判定した場合、あるいはSOCが不足していないと判定した場合には、SOC状態確認処理へ移行する(S134)。S134の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態とS130の処理で判定した速度超過量を判定する処理である。SOC状態を確認する処理は、図9のS102の処理と同様である。また、車両運動制御部12は、S130の処理で演算した速度超過量が所定値以上の大きな超過量であるか否かを判定する。所定値として、例えば1km/hが用いられる。S132の処理において、SOCが不足している場合であって、大きな速度超過量である場合には、比例ゲイン変更処理へ移行する(S140)。
【0120】
S140の処理は、車両運動制御部12が実行し、比例ゲインPを大きく変更してエンジン42を停止する処理である。例えば、基本ゲインP0を1.5倍した値を比例ゲインPに設定する。このように、速度が超過しており、かつSOCが不足している場合には比例ゲインPを大きく設定する。S140の処理が終了すると、図10に示す制御処理を終了する。これにより、図8のS90の処理において、増大させた比例ゲインPによって指示加速度ahが算出され、結果、回生減速度を大きくすることができる。よって、速度が超過してSOCが超過している場合には、エンジン42を停止して積極的に回生するようにフィードバック制御を変更することができるので、燃費向上を図ることができる。
【0121】
一方、S134の処理において、SOCが不足していないと判定した場合には、SOC状態確認処理へ移行する(S136)。S136の処理は、車両運動制御部12が実行し、バッテリ44のSOC状態を確認する処理である。SOC状態を確認する処理は、図9のS104の処理と同様である。S136の処理において、SOCが超過していないと判定した場合には、図10に示す制御処理を終了する。一方、S136の処理において、SOCが超過していると判定した場合には、滑空走行処理へ移行する(S138)。
【0122】
S138の処理は、車両運動制御部12が実行し、滑空走行を行う処理である。車両運動制御部12は、エンジン42を停止するとともにハイブリットシステム4に回生停止信号を出力する。S138の処理が終了すると、図10に示す制御処理を終了する。これにより、SOCが超過状態であって速度超過である場合には、エンジン42を停止し回生を実行しない滑空走行をすることにより燃費向上を図ることができる。
【0123】
一方、S130の処理において、速度超過でないと判定した場合には、出力調整処理へ移行する(S144)。S144の処理の詳細は、図11に記載されている。図11に示すように、出力調整処理は、速度判定処理から開始する(S150)。S150の処理は、車両運動制御部12が実行し、車速が不足しているか否かを判定する処理である。処理内容は、図9のS110の処理と同様である。S150の処理において、速度不足でないと判定した場合には、図11に示す制御処理を終了する。一方、S150の処理において、速度不足であると判定した場合には、SOC状態判定処理へ移行する(S152)。
【0124】
S152の処理は、車両運動制御部12が実行し、SOCが不足しているか否かを判定する処理である。この判定処理は、図9のS102のSOC判定処理と同様である。S152の処理において、SOCが不足していないと判定した場合には、出力制御処理へ移行する(S158)。
【0125】
S158の処理は、車両運動制御部12が実行し、エンジン42出力を増大する処理である。車両運動制御部12は、例えばエンジン42の非効率領域であっても高出力(高回転)で作動させる。S158の処理が終了すると、図11に示す制御処理を終了する。
【0126】
一方、S152の処理において、SOCが不足していると判定した場合には、SOC状態確認処理へ移行する(S154)。S154の処理は、SOCが超過しているか否かを判定する処理である。この処理は、図9のS104の処理と同様である。S154の処理において、SOCが超過状態でないと判定した場合には、図11に示す制御処理を終了する。一方、S154の処理において、SOCが超過状態であると判定した場合には、出力制御処理へ移行する(S156)。
【0127】
S156の処理は、車両運動制御部12が実行し、エンジン42及びモータ43の出力を制御する処理である。車両運動制御部12は、エンジン42を最適効率で回転させるとともに、駆動力の不足分をバッテリ44の放電によるモータ出力によって補うようにハイブリットシステム4へ信号を送信する。S156の処理が終了すると、図11に示す制御処理を終了する。
【0128】
以上で、図10,11に示す制御処理を終了する。図8〜11に示す制御処理を実行することにより、速度パターンに最適なフィードバック制御を行うことによって低燃費走行を実現することができる。
【0129】
ところで、従来のフィードバック制御であれば、計画した速度パターンを忠実に実行することを最優先としていたため、目標速度に合わせ込む際にエンジン42出力を増加させたり、あるいはSOCが超過している状態で回生ブレーキを行う場合がある。このため、速度パターンを低燃費に実行することができない場合がある。
【0130】
これに対して、第3実施形態に係る走行制御部によれば、エンジン42の動作状態情報、速度超過不足情報、及びSOC過不足情報に基づいてフィードバック制御を行うことができる。これにより、目標速度パターンにより規定される目標速度に対してフィードバック制御を行う場合に、目標値にあわせることを最優先とせずに、低燃費とSOC状態を考慮しながら目標値にあわせることができる。よって、速度パターンを低燃費に実行することができる。
【0131】
なお、上述した各実施形態は本発明に係る走行制御装置の一例を示すものである。本発明に係る走行制御装置は、各実施形態に係る走行制御装置に限られるものではなく、各請求項に記載した要旨を変更しない範囲で、各実施形態に係る走行制御装置を変形し、又は他のものに適用したものであってもよい。
【0132】
例えば、上記各実施形態において、自動運転機能を備えた車両5について説明したが、運転支援システム機能を備えた車両5であってもよい。この場合、例えば、車両制御を支援するディスプレイ等を備えて構成とするとよい。
【0133】
また、第3実施形態において、エンジン42の動作状態情報、速度超過不足情報、及びSOC過不足情報に基づいてフィードバック制御を行う例を説明したが、これらの何れか一つのパラメータに基づいてフィードバック制御を行う場合でもよい。
【図面の簡単な説明】
【0134】
【図1】本実施形態に係る走行制御部を備える車両の構成概要を示すブロック図である。
【図2】第1実施形態に係る走行制御部の動作を示すフローチャートである。
【図3】第1実施形態に係る走行制御部の動作を示すフローチャートである。
【図4】第1実施形態に係る走行制御部が生成する速度パターンの概要図である。
【図5】第2実施形態に係る走行制御部の動作を示すフローチャートである。
【図6】第2実施形態に係る走行制御部の動作を説明する概要図である。
【図7】第2実施形態に係る走行制御部が生成する速度パターンの概要図である。
【図8】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【図9】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【図10】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【図11】第3実施形態に係る走行制御部の動作を示すフローチャートである。
【符号の説明】
【0135】
1…走行制御部(走行制御装置)、2…ECU、5…車両、10…目標速度パターン生成部(目標速度パターン生成手段)、11…目標速度パターン再生成部(目標速度パターン再生成手段)、12…車両運動制御部(車両運動制御手段)、42…エンジン、43…モータ、44…バッテリ。
【特許請求の範囲】
【請求項1】
エンジン及びモータを有し、前記モータを発電機として作動させ回生制御によりバッテリを充電可能に構成された車両の走行制御装置であって、
所定地点までの行程を複数の区間に分割して各区間での目標速度パターンを生成する目標速度パターン生成手段と、
前記バッテリのSOCが第1の所定値以下の場合には、前記目標速度パターンに基づいて加速する加速区間において前記目標速度パターンに規定される加速よりも大きな加速を行い、前記目標速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターンを再生成する目標速度パターン再生成手段と、
を備えることを特徴とする走行制御装置。
【請求項2】
前記モータは、前記バッテリから供給される電力により駆動源として機能し、
前記目標速度パターン再生成手段は、前記バッテリのSOCが前記第1の所定値よりも大きい第2の所定値以上の場合には、前記減速区間において前記モータを駆動させて放電を行う目標速度パターンを再生成する請求項1に記載の走行制御装置。
【請求項3】
前記目標速度パターン再生成手段は、前記バッテリのSOCが前記第1の所定値よりも大きい第2の所定値以上の場合には、前記モータを駆動源として駆動させるための放電を、後続車両の存在しない区間よりも後続車両の存在する区間で優先させる目標速度パターンを再生成する請求項2に記載の走行制御装置。
【請求項4】
前記目標速度パターンにより規定された各区間での目標速度に基づいた走行制御を行う際に、前記エンジンの動作状態情報、車速と前記目標速度との差を示す速度超過不足情報、及び、前記バッテリのSOCと目標SOCとの差を示すSOC過不足情報の何れか一つに基づいてフィードバック制御を行う走行制御手段を備える請求項1〜3の何れか一項に記載の走行制御装置。
【請求項1】
エンジン及びモータを有し、前記モータを発電機として作動させ回生制御によりバッテリを充電可能に構成された車両の走行制御装置であって、
所定地点までの行程を複数の区間に分割して各区間での目標速度パターンを生成する目標速度パターン生成手段と、
前記バッテリのSOCが第1の所定値以下の場合には、前記目標速度パターンに基づいて加速する加速区間において前記目標速度パターンに規定される加速よりも大きな加速を行い、前記目標速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターンを再生成する目標速度パターン再生成手段と、
を備えることを特徴とする走行制御装置。
【請求項2】
前記モータは、前記バッテリから供給される電力により駆動源として機能し、
前記目標速度パターン再生成手段は、前記バッテリのSOCが前記第1の所定値よりも大きい第2の所定値以上の場合には、前記減速区間において前記モータを駆動させて放電を行う目標速度パターンを再生成する請求項1に記載の走行制御装置。
【請求項3】
前記目標速度パターン再生成手段は、前記バッテリのSOCが前記第1の所定値よりも大きい第2の所定値以上の場合には、前記モータを駆動源として駆動させるための放電を、後続車両の存在しない区間よりも後続車両の存在する区間で優先させる目標速度パターンを再生成する請求項2に記載の走行制御装置。
【請求項4】
前記目標速度パターンにより規定された各区間での目標速度に基づいた走行制御を行う際に、前記エンジンの動作状態情報、車速と前記目標速度との差を示す速度超過不足情報、及び、前記バッテリのSOCと目標SOCとの差を示すSOC過不足情報の何れか一つに基づいてフィードバック制御を行う走行制御手段を備える請求項1〜3の何れか一項に記載の走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−286185(P2009−286185A)
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願番号】特願2008−138361(P2008−138361)
【出願日】平成20年5月27日(2008.5.27)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願日】平成20年5月27日(2008.5.27)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]