
走行台車システム
【課題】
多数の走行台車に高速で指令を送信できるようにして、指令の送信遅れに伴う制御遅れを小さくする。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、前記アクセスポイントから複数台の走行台車へ制御周期毎に指令を無線で送信し、複数台の走行台車からアクセスポイントへ前記制御周期毎に報告を無線で送信する。アクセスポイントは、アクセスポイント用時間帯に、送信権を確認するための信号を走行台車との間で交換せずに、指令を送信する。走行台車は、台車用時間帯に、送信権を確認するための信号を他の走行台車との間で交換した上で報告を送信する。
多数の走行台車に高速で指令を送信できるようにして、指令の送信遅れに伴う制御遅れを小さくする。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、前記アクセスポイントから複数台の走行台車へ制御周期毎に指令を無線で送信し、複数台の走行台車からアクセスポイントへ前記制御周期毎に報告を無線で送信する。アクセスポイントは、アクセスポイント用時間帯に、送信権を確認するための信号を走行台車との間で交換せずに、指令を送信する。走行台車は、台車用時間帯に、送信権を確認するための信号を他の走行台車との間で交換した上で報告を送信する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は走行台車システムに関し、特に多数の走行台車が無線LANを介してシステムサーバにより制御されるシステムに関する。
【背景技術】
【0002】
出願人は、天井走行車等の多数の走行台車を、地上側のシステムサーバにより制御するシステムを提案した(特許文献1:JP2008-150135A)。このシステムでは、0.1s等の制御周期毎に、システムサーバが走行台車に目標位置等を指令し、走行台車に実行させる。走行台車とシステムサーバとが通信するには、無線LANが適している。このシステムでは、無線LANのために、システムサーバから走行台車への指令が遅れず、かつ走行台車からシステムサーバへの報告が遅れないことが重要である。指令あるいは報告が遅れると、システムサーバは走行台車をリアルタイムに制御できなくなるため、走行台車の速度等を小さくする必要がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】JP2008-150135A
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明の課題は、多数の走行台車に高速で指令を送信できるようにして、指令の送信遅れに伴う制御遅れを小さくすることにある。
この発明の追加の課題は、多数の走行台車が短時間で報告できるようにして、報告の遅れに伴う制御遅れを短くすることにある。
この発明の追加の課題は、同じタイムスロット内に送信しようとする走行台車が複数有っても、送信が失敗しないようにすることにある。
【課題を解決するための手段】
【0005】
この発明の走行台車システムは、
システムサーバとアクセスポイントとを地上LANを介して接続し、前記アクセスポイントから複数台の走行台車へ制御周期毎に指令を無線で送信し、複数台の走行台車からアクセスポイントへ前記制御周期毎に報告を無線で送信するシステムであって、
前記制御周期中に、アクセスポイントからの送信専用で、走行台車からの報告を認めないアクセスポイント用時間帯と、走行台車からアクセスポイントへ報告するための台車用時間帯とを設け、
アクセスポイントは、アクセスポイント用時間帯に、送信権を確認するための信号を走行台車との間で交換せずに、指令を送信するための手段を備え、
走行台車は、台車用時間帯に、送信権を確認するための信号を他の走行台車との間で交換した上で、前記報告を送信するための送信手段を備えていることを特徴とする。
【0006】
この発明では、アクセスポイントからの指令と走行台車からの報告とが衝突すること、即ち複数のパケットが同時に送信されて受信不能になること、がない。またアクセスポイントは、専用の時間帯に指令を送信するので、RTS(送信する旨のメッセージ)あるいはCTS(受信準備が完了した旨のメッセージ)等の、送信権を確認するための信号を交換する必要がない。従って多数の走行台車に高速で指令を送信でき、指令の送信遅れに伴う制御遅れを小さくできる。
【0007】
好ましくは、台車用時間帯を複数のタイムスロットに分割すると共に、走行台車は複数のタイムスロットから1個をランダムに選択するための選択手段を備え、前記送信手段により選択したタイムスロット中に報告を送信する。このようにすると、1個のタイムスロット内で複数の走行台車からの報告が衝突する確率を小さくできる。またバックオフアルゴリズムのように、待時間の間継続して他の端末からのキャリアを検出しないことを条件とするのではないので、どの走行台車も送信しない時間が長くならない。従って多数の走行台車が短時間で報告でき、報告の遅れに伴う制御遅れを短くできる。
【0008】
特に好ましくは、走行台車は、選択したタイムスロットが到来した後、さらに待機する待時間をランダムに定めるための手段を備えて、前記待時間経過後に前記送信手段により報告を送信する。即ち、1個のタイムスロット内に送信しようとする走行台車の数は僅かなので、僅かな数の走行台車間の競合を解消すればよい。そのためには既存のバックオフアルゴリズム等で十分対応できる。
【0009】
なおバックオフアルゴリズムを用いず、例えば台車用時間帯を1024タイムスロットなどの、台車数に比べて充分多いスロットに分割しても良い。そして10ビットのタイムスロットデータの下位8ビットを有効とし、有効なタイムスロットが到来し、かつその時点でキャリアを検出していなければ、送信するようにしても良い。タイムスロットの数は充分多いので、同じタイムスロットに送信しようとする走行台車の数は僅かで、パケットの衝突は少ない。ここで、タイムスロットが到来した時点でキャリアを検出している場合、キャリアを検出しなくなるまで待って送信を開始するようにしたとする。するとキャリアを検出しなくなるまでの間に、複数の台車のタイムスロットが到来し、同時に送信を開始する可能性がある。そこでタイムスロットが到来した時点でキャリアを検出していると、次の自己のタイムスロットが到来するまで待機することが好ましい。10ビット中下位8ビットを有効とすると、送信のチャンスは4回である。ただしこの手法では、同じ台車用時間帯内に全ての走行台車が送信できる確率は、複数のタイムスロットとバックオフアルゴリズムの組み合わせよりもやや低い。
【図面の簡単な説明】
【0010】
【図1】実施例の走行台車システムのレイアウトを示す平面図
【図2】実施例でのアクセスポイントの配置と通信チャネルとを示す平面図
【図3】実施例での、走行台車、アクセスポイント、モーションコントローラ、及びシステムサーバの関係を示すブロック図
【図4】システムサーバでの処理を示すフローチャート
【図5】走行台車での処理を示すフローチャート
【図6】走行台車でのローミングに関する処理を示すフローチャート
【図7】走行台車がシステムサーバからの指令を受信できなかった際の、フェイルセーフ機構を示すフローチャート
【図8】システムサーバが走行台車からの報告を受信できなかった際の、フェイルセーフ機構を示すフローチャート
【図9】走行台車/システムサーバ間の通信のタイミングと、処理のタイミングとを示す図
【図10】システムサーバ/走行台車間の通信のタイミングを示す図で、1)はシステムサーバでの処理を示し、2)はモーションコントローラでの処理を、3),5)はアクセスポイントでの処理を、4),6)は走行台車群での処理を示し、7)は無線LANの割り当てを示す。
【図11】アクセスポイントから走行台車への通信を示す図
【図12】走行台車からアクセスポイントへの通信を示す図
【図13】走行台車からアクセスポイントへの送信アルゴリズムを示すフローチャート
【図14】台車からの送信が輻輳することを防止するための機構を示す図
【発明を実施するための形態】
【0011】
以下に本発明を実施するための最適実施例を示す。この発明の範囲は、特許請求の範囲の記載に基づき、明細書の記載とこの分野での周知技術とを参酌し、当業者の理解に従って定められるべきである。
【実施例】
【0012】
図1〜図14に、実施例の走行台車システム2を示す。図1はシステム2のレイアウトを示し、4はインターベイルートで、複数のイントラベイルート6間を接続し、これらのルート4,6の全体を10〜50個程度のエリア10に分割し、エリア10毎にアクセスポイント8を設ける。エリア10はアクセスポイント8の通信能力に比べて狭くし、具体的にはルート4,6の任意の地点で、走行台車12が少なくとも2個のアクセスポイント8と通信できるようにする。なお退避区間、メンテナンス区間などの、物品を搬送する通常の走行ルートから外れた区間では、1個のアクセスポイント8とのみ通信できるようにしても良い。
【0013】
12は走行台車で、ここでは天井走行車とするが、地上を有軌道で走行する有軌道台車、あるいは地上を無軌道で走行する無人搬送車などでもよい。14は地上LANで、アクセスポイント8とモーションコントローラ16並びにシステムサーバ18を接続し、システムサーバ18は、他のLANもしくは地上LAN14により、上位サーバ20に接続されている。上位サーバ20はシステムサーバ18に対して搬送などの要求を行い、システムサーバ18は複数の走行台車12の位置、分岐方向、速度などの状態を記憶し、少なくとも位置を記憶する。システムサーバ18は、例えば0.1sの制御周期、より一般的には0.01s〜0.3sの制御周期毎に、モーションコントローラ16とアクセスポイント8とを介し、走行台車12に指令を送信する。指令の内容は、次の制御周期での目標位置と分岐の方向、移載に関する指令などであり、これ以外に走行台車12の目標速度も指令しても良い。
【0014】
図2は、走行台車システム2でのエリア10とアクセスポイント8との配置を示す。前記のように、走行ルート上の全地点で、走行台車は複数のアクセスポイント8と通信可能である。なお物品を搬送する区間である通常走行ルート上でのみ、複数のアクセスポイント8と通信可能にしても良い。すると1個のアクセスポイント8がブレイクダウンしても、走行台車は走行を続行できる。実施例ではエリア10は例えば1辺あるいは直径が30m程度で、走行台車の台数は例えば上限が500台程度で、アクセスポイント8の個数は20程度である。アクセスポイント8当たりの走行台車12の台数は、上限が60台程度である。モーションコントローラ16は走行台車システム2の全体に対して1台設けるが、システムの規模が大きい場合、モーションコントローラ16を複数台設けても良い。
【0015】
エリア10毎に走行台車との通信チャネル、即ち使用する周波数帯等を変化させ、例えば4種類のチャネルfa〜fdを設ける。このようにすると、隣接するエリアの間で必ずチャネルが変化するように、エリア10を配置できる。そしてエリア10の境界位置と各エリアでのチャネルを、走行台車が記憶するマップに記載し、走行台車は絶対位置センサなどの適宜のセンサで現在位置を確認しながら走行する。従って走行台車12は、どのエリア10を走行しているかと、用いるべきチャネルの種類とを知ることができる。またエリアの境界に接近してきたことと、次のエリアのチャネルをマップから求めることができる。
【0016】
図3に走行台車12から上位サーバ20までの構成を示す。システムサーバ18は時計22を備え、この時計を走行台車システムの共通の基本時計とする。台車状態記憶部24は走行台車12の現在位置、速度、分岐の方向、移載に関するデータ、割付済みの指令などの台車の状態を記憶し、指令作成部26は走行台車毎に次の制御周期の終わりでの目標位置と分岐方向、移載に関するデータなどの指令を作成する。
【0017】
アクセスポイント8は通信可能範囲内の走行台車12と通信し、通信は100ms(100m秒)から成る制御周期単位で行い、制御周期の例えば最初にビーコンを送出して、アクセスポイント8が使用するチャネルなどを通知する。制御周期の最初の30ms間にアクセスポイント8から走行台車12への指令を送信し、次の40ms間に走行台車12からの報告などを受信し、最後の30msは予備とする。モーションコントローラ16は例えば20台のアクセスポイント8へ、システムサーバ18からの指令を送信し、アクセスポイント8からの報告をまとめてシステムサーバ18へ送信する。
【0018】
走行台車12は、アンテナ28と通信部30により、アクセスポイント8と通信し、指令を主制御部32へ引き渡し、主制御部32からシステムサーバ18への報告(送信データ)を受け取って送信する。また主制御部32は走行ルートのマップを記憶し、新たなエリアとの境界に接近すると、次のエリアのアクセスポイントからのビーコンを検出すること及びビーコン検出に用いるチャネルを通信部30へ入力する。
【0019】
主制御部32は走行系34と移載系35,並びにセンサ群36を制御する。走行系34では、図示しない走行モータをサーボ制御し、システムサーバ18から受信した目標位置に従って走行し、分岐する場合、システムサーバ18から指定された分岐方向に分岐する。移載系35は、昇降台を昇降させる昇降モータと、昇降台等を横移動させる横送りモータ、並びにこれらを鉛直軸回りに回動させて物品の向きを整える回動モータなどを備えている。そして主制御部32はシステムサーバ18から受信した移載の指令に従って、移載系35を駆動する。センサ群36は走行台車の絶対位置を検出する絶対位置センサ、先行台車を検出する距離センサ、バッファあるいはロードポートなどでの先入品の有無を検出する先入品センサ、さらに物品に取り付けたRFIDなどを読み取るRFIDリーダなどから成る。主制御部32はセンサ群36により周囲の状態を検出し、必要に応じてそれらのデータをシステムサーバ18へ送信する。
【0020】
通信部30は電波強度検出部40を備え、アクセスポイント8からの電波強度を求める。ローミング部41は、新たなアクセスポイント8へのローミングを制御する。送信制御部42はアクセスポイント8への送信を制御し、乱数発生部を備えて、送信のための自己の割り当て時刻を乱数(例えば0〜39の40段階で、好ましくは8〜64段階)で発生させ、バックオフ時間を乱数(0〜15の例えば16段階)で発生させる。時計43は、システムサーバ18の時計22に合わせた時計で、時刻は例えば1ms単位で、図示しないクロックにより時刻をカウントする。時計校正部44は、システムサーバ18からのタイムスタンプに従い、時計43の時刻データを校正する。
【0021】
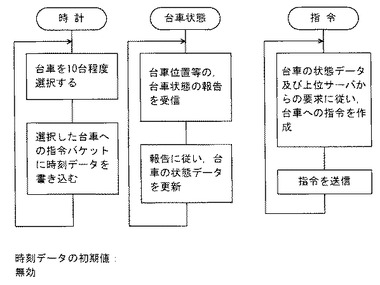
図4にシステムサーバ18での処理を示す。システム全体で時計を合わせるため、タイムスタンプをシステムサーバが作成し、モーションコントローラとアクセスポイントを介して、制御周期の最初の30msの間に、指令と共に走行台車に送信することを考える。するとシステムサーバからアクセスポイントまでの送信時間を無視しても、タイムスタンプの作成から走行台車への送信までに、最大30msの誤差が生じる。このため数100台の走行台車に対し、制御周期毎に意味のあるタイムスタンプを送信することは困難である。そこでシステムサーバは最大500台程度の走行台車のうち制御周期毎に10台程度、例えば5〜50台を選択し、制御周期毎に選択した走行台車のみに対して、時計を校正する。制御周期を0.1s、走行台車を500台とすると、制御周期毎に10台ずつ選択することにより、例えば5s毎に正確なタイムスタンプを送信できる。具体的には、選択した走行台車への指令のパケットに時刻データ(タイムスタンプ)を書き込み、他の走行台車に対しては時刻データを無効としておく。そして選択した走行台車への指令のパケットが、制御周期の最初に走行台車へ送信されるように、モーションコントローラへのパケットの送信順序を制御する。
【0022】
システムサーバは管理下の走行台車の状態を記憶し、制御周期毎に走行台車の位置などの台車の状態報告を受信し、報告に従って台車の状態データを更新する。なお台車の状態の受信に失敗した場合、該当台車に関して状態データを更新しない。台車への指令プロセスでは、台車の状態データと上位サーバからの搬送の要求に従い、台車への指令を作成する。作成した指令をモーションコントローラとアクセスポイントを介して制御周期毎に走行台車へ送信する。
【0023】
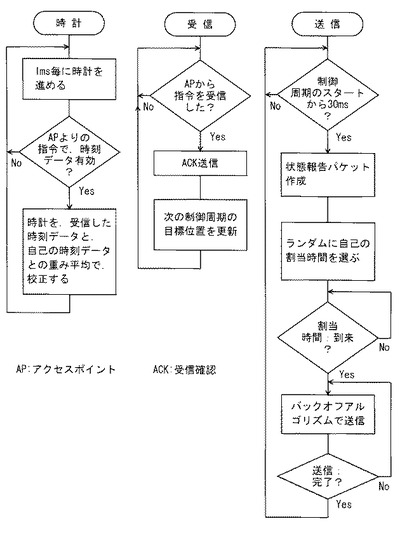
図5,図6に走行台車側のプロセスを示す。時計プロセスでは走行台車は自己のクロックを用いて1ms毎に時計を進める。そしてアクセスポイントからの指令中にタイムスタンプが付加されている場合、受信した時刻データ(タイムスタンプ)と、自己の時計での時刻データとの重み付き平均で時計を校正する。自己の時計の重みとシステムサーバの時計の重みの比を、例えば1:1〜5:1とする。このようにすると5s毎にタイムスタンプを受信するものとして、10s〜40s程度の時定数で走行台車の時計が校正される。走行台車の時計を1回のタイムスタンプでは部分的にしか校正しないのは、アクセスポイントから走行台車へのタイムスタンプの送信遅れなどによる影響を小さくするためである。制御周期のどの時点でアクセスポイントが送信データが送信するかは毎回変動するが、走行台車の時計を少しずつ書き換えると、アクセスポイントからの送信遅れの影響などを小さくできる。
【0024】
指令の受信プロセスでは、アクセスポイントから指令を受信すると、受信確認パケットを返信し、指令に従って次の制御周期での目標位置を更新する。なお指令及び報告の再送は例えば2回までとし、1制御周期で最初の送信を含めて3回までの送信を認める。そして仮に3回とも指令の受信に失敗した場合、目標位置等を更新しないので、走行台車は減速する。
【0025】
走行台車からの送信プロセスは、制御周期の開始から30ms間待機し、この時点でシステムサーバへの状態報告パケットを作成する。全ての走行台車はシステムサーバの時計に合わせた時計を持っているので、制御周期の開始から同じ時間だけ経過した時点で一斉に状態報告パケットを作成する。走行台車はアクセスポイントへの送信に割り当てられた40msを例えば40分割し、このうち1msを自己の割り当て時間として、乱数により割り当て時間を選ぶ。そして割り当て時間が到来するまで待機し、割り当て時間に達すると、バックオフアルゴリズムでパケットの衝突を防止しながら、状態報告パケットを送信する。
【0026】
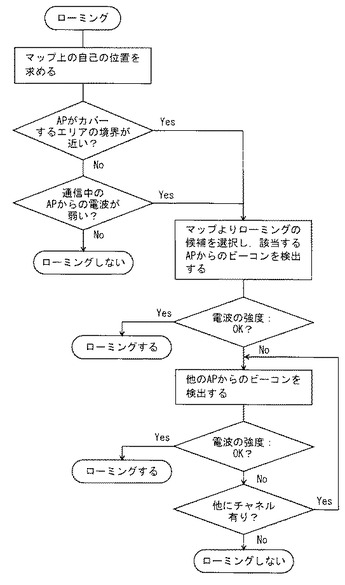
図6に走行台車でのローミングの処理を示す。走行台車はマップ上の自己の位置を知っており、次に進入するエリアでのチャネルも知っている。そしてエリアの境界が近づく、もしくは通信中のアクセスポイントからの電波が弱くなると、ローミングを開始する。ローミングではマップから次に進入するエリアのチャネルを求め、そのチャネルでビーコンを検出する。なおビーコンは例えば制御周期の最初に送信される。そしてビーコンの電波強度が充分であればローミングし、強度が不足する場合、残る2チャンネルに対するローミングを試みる。システムが用いるチャネルが4種類に制限され、どのチャネルでローミングを試みるべきかがマップから分かるので、簡単にローミングできる。
【0027】
走行ルートの各地点で2種類以上のチャネルで通信可能なので、アクセスポイントにトラブルが発生しても、他のアクセスポイントとの通信を維持できる。ローミングは例えば走行台車からアクセスポイントへの送信に割り当てられた時間帯に、プローブ要求をアクセスポイントへ送信し、アクセスポイントからプローブ許可を受信することにより完了する。なお状態報告パケットにプローブ要求を追加して送信しても良い。またプローブ要求を行わずに、走行台車から台車のID、目的地、搬送指令のID、現在位置、速度、分岐方向などの報告を送信し、アクセスポイントが新たな台車から報告を受けたことを確認することにより、ローミングを完了しても良い。
【0028】
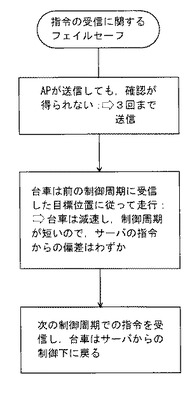
図7に、走行台車がシステムサーバからの指令の受信に失敗した際の、フェイルセーフ機構を示す。アクセスポイントが指令を送信しても走行台車からの確認が得られない場合、2回まで再送する。従って走行台車が指令の受信に失敗する確率は元々極めて小さい。それでも指令を受信できなかった場合、台車は前回の制御周期での目標位置に従って走行する。従って多くの場合、台車はオーバーランして減速する。制御周期は0.1s程度なので、走行台車の最大走行速度を4m/sとしても、走行台車がオーバーランする距離は最大で40cm程度である。なおシステムサーバは、この程度のオーバーランでは台車間の干渉が生じないように、車間距離を定めて目標位置を指令している。そして次の制御周期で指令の受信に成功すると、走行台車はサーバの制御下に戻ることができる。
【0029】
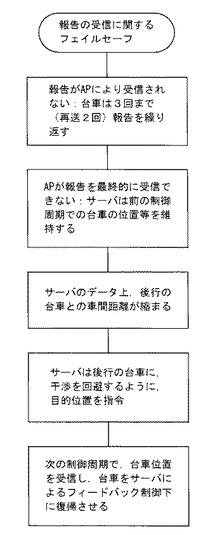
図8に、システムサーバ側が走行台車からの報告を受信できなかった際のフェイルセーフ機構を示す。報告がアクセスポイントにより受信できなかった場合、台車は合計3回まで報告する。3回とも失敗した場合、サーバは前の制御周期での台車の位置などの状態を更新せずに記憶する。この結果、システムサーバのデータ上で、後行の走行台車との車間距離が縮まり、サーバは、後行の走行台車に対し干渉を回避するように目的位置を指令する。そして次の制御周期で台車の位置等を受信することができれば、台車をサーバによるフィードバック制御下に戻すことができる。
【0030】
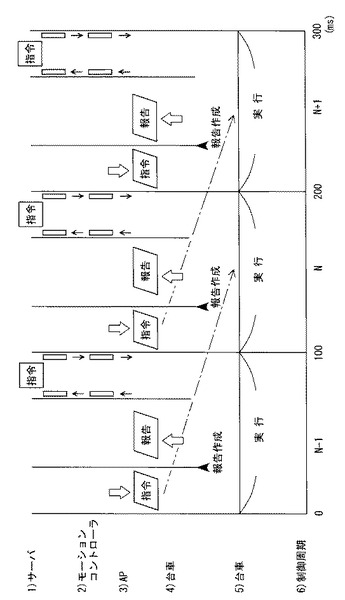
図9に、走行台車からシステムサーバへの報告と、システムサーバからの指令並びに走行台車による実行のタイミングを示す。制御周期は100msで、図の下部に時刻を示す。複数台の走行台車は一斉に、例えば30msの時点で、システムサーバへの報告を作成し、30ms〜70ms等の間に分散して指令を報告する。報告はアクセスポイントからモーションコントローラを介してシステムサーバへ送られ、システムサーバは次の制御周期(図の制御周期N)での指令を作成し、モーションコントローラからアクセスポイントへ指令を送信する。報告の転送からアクセスポイントへの指令の送信を70msから100msまでに処理する。アクセスポイントは次の制御周期Nの例えば最初の30ms間に走行台車に指令を送信し、走行台車は制御周期N+1でその指令を実行する。なお制御周期の始まりと終わりを、走行台車が報告パケットを作成する時点から次の報告を作成する時点までとし、指令を受信すると直ちに指令の実行を開始してもよい。
【0031】
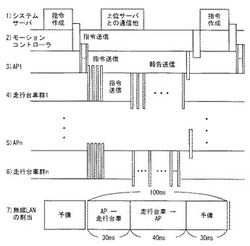
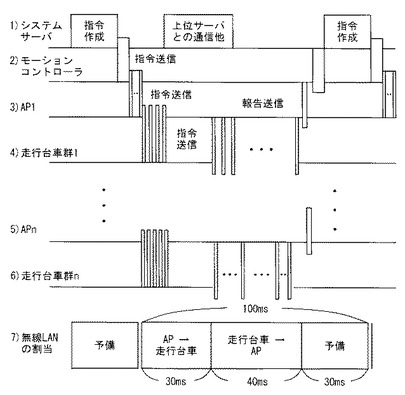
図10に、システムサーバと走行台車との通信のタイミングなどを示し、例えば1制御周期は100msで、このうち30msをアクセスポイントから走行台車への送信に、次の40msを走行台車からアクセスポイントへの通信に、残る30msを予備とする。そしてアクセスポイントは周期の最初の30msの間に最大60台程度の走行台車に指令を送信し、走行台車は40msの割り当て時間を40分割し、送信を開始する自己の割り当て時間を、例えば1msずつランダムに選択する。そしてこの1msの範囲で、バックオフアルゴリズムにより、走行台車間の送信パケットの衝突を防止する。
【0032】
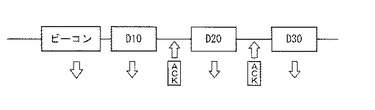
図11にアクセスポイントから走行台車への送信の例を示し、最初にビーコンを送出し、続いて走行台車毎のデータを送信する。ビーコンの発生後、例えば30ms程度の時間はアクセスポイントからの送信に割り当てられた時間である。この間、RTS(送信を開始する旨のメッセージ),CTS(受信の準備ができた旨のメッセージ)などによる、パケットの衝突の防止制御は不要である。そして走行台車側は指令を受信すると、その都度ACK(受信確認のメッセージ)を送出する。図11のD10,D20,D30などは、個別の走行台車毎の指令である。
【0033】
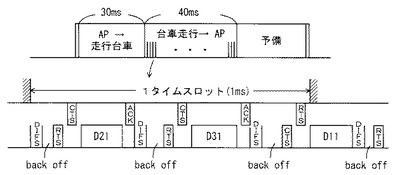
図12に、走行台車からアクセスポイントへの送信に割り当てた40msのうちの1タイムスロット(1ms)での処理を示す。なおこのタイムスロットを割り当て時間と呼ぶ。アクセスポイント当たりの走行台車の台数は最大で60台程度で、送信時間を40スロットに分割するので、1タイムスロット当たりの走行台車の台数は最大で平均約1.5で、考慮する必要があるのは1つのタイムスロットに5台程度の走行台車が通信する場合までである。例えば5台の台車が1つのタイムスロットを用いる確率は、平均値を1.5台として、1台の場合の約1/24である。1タイムスロット内で複数の走行台車が送信する場合、バックオフアルゴリズムで送信の順序を規制する。即ちタイムスロットが到来すると、各走行台車は0〜15の範囲で乱数を発生させ、キャリアが無い時間がDIFS(IEEE802.11で規定された待時間)とさらにバックオフ時間だけ続くと、RTS信号を送出する。バックオフアルゴリズムで用いる乱数を16通りとすると、2台の台車が同じバックオフ時間を持つ確率は僅かである。そしてRTSに対して、アクセスポイントからのCTSを受信できると、データの送信を開始し、アクセスポイントはデータを受信できると確認信号ACKを送出する。
【0034】
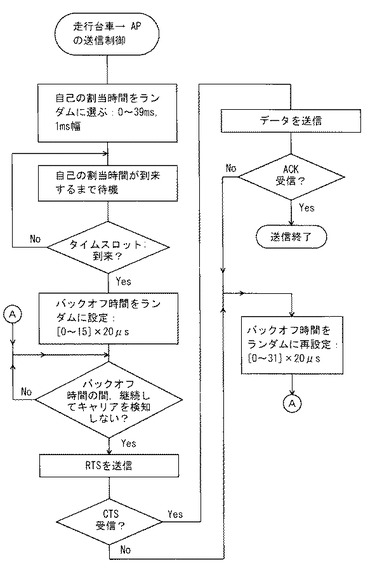
図13に走行台車からアクセスポイントへの送信制御を示す。送信に割り当てられた時間は40msで、自己の割り当て時間をランダムに1ms幅で選択する。そして自己の割り当て時間が到来するまで待機し、到来するとバックオフ時間をランダムに設定する。バックオフ時間の間継続してキャリアを検出しないとRTSを送信し、CTSを受信するとデータを送信する。続いて確認信号ACKを受信できると送信が終わる。ACKの受信まで進めない場合、バックオフ時間をランダムに再設定して再度トライする。なおパケットの衝突などがない場合、DIFSからACKまでの時間は、走行台車1台分の報告に対し、例えば400μs程度である。従って1タイムスロット当たり3台以上の走行台車が存在すると、1msの間に送信が終わらないことがある。この場合、未送信の走行台車は次のタイムスロットでも送信を続行する。そして次のタイムスロットを用いる予定の走行台車は、この間バックオフアルゴリズムにより送信を待機する。
【0035】
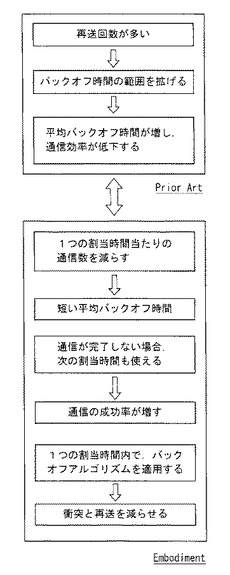
図14に実施例の送信アルゴリズムと、単なるバックオフアルゴリズムとの比較を示す。ここでは、1アクセスポイント当たり60台の走行台車が存在するとの状況で検討する。通常のバックオフアルゴリズムでは、送信までの待機時間は例えば0〜15の16区分で、16区分に60台の台車を収容すると、大部分の送信パケットが衝突し、再送回数が増す。再送回数を少なくするため、バックオフ時間の範囲を拡大すると、平均のバックオフ時間が増し、通信効率が低下する。
【0036】
これに対して実施例では、40msの時間を1msずつに分割するので、1つの割り当て時間当たりの送信は平均して1.5回である。1.5回分の送信を衝突無しに制御すれば良いので、バックオフ時間を短くできる。また仮に1msの割り当て時間内に通信が完了しない場合でも、次の割り当て時間を引き続いて使うことができる。これらの結果、通信の成功率が増す。1つの割り当て時間内では、送信の衝突をバックオフアルゴリズムで回避するので、衝突とこれに伴う再送とを少なくできる。
【符号の説明】
【0037】
2 走行台車システム
4 インターベイルート
6 イントラベイルート
8 アクセスポイント
10 エリア
12 走行台車
14 地上LAN
16 モーションコントローラ
18 システムサーバ
20 上位サーバ
22 時計
24 台車状態記憶部
26 指令作成部
28 アンテナ
30 通信部
32 主制御部
34 走行系
35 移載系
36 センサ群
40 電波強度検出部
41 ローミング部
42 送信制御部
43 時計
44 時計校正部
fa〜fd チャネル
【技術分野】
【0001】
この発明は走行台車システムに関し、特に多数の走行台車が無線LANを介してシステムサーバにより制御されるシステムに関する。
【背景技術】
【0002】
出願人は、天井走行車等の多数の走行台車を、地上側のシステムサーバにより制御するシステムを提案した(特許文献1:JP2008-150135A)。このシステムでは、0.1s等の制御周期毎に、システムサーバが走行台車に目標位置等を指令し、走行台車に実行させる。走行台車とシステムサーバとが通信するには、無線LANが適している。このシステムでは、無線LANのために、システムサーバから走行台車への指令が遅れず、かつ走行台車からシステムサーバへの報告が遅れないことが重要である。指令あるいは報告が遅れると、システムサーバは走行台車をリアルタイムに制御できなくなるため、走行台車の速度等を小さくする必要がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】JP2008-150135A
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明の課題は、多数の走行台車に高速で指令を送信できるようにして、指令の送信遅れに伴う制御遅れを小さくすることにある。
この発明の追加の課題は、多数の走行台車が短時間で報告できるようにして、報告の遅れに伴う制御遅れを短くすることにある。
この発明の追加の課題は、同じタイムスロット内に送信しようとする走行台車が複数有っても、送信が失敗しないようにすることにある。
【課題を解決するための手段】
【0005】
この発明の走行台車システムは、
システムサーバとアクセスポイントとを地上LANを介して接続し、前記アクセスポイントから複数台の走行台車へ制御周期毎に指令を無線で送信し、複数台の走行台車からアクセスポイントへ前記制御周期毎に報告を無線で送信するシステムであって、
前記制御周期中に、アクセスポイントからの送信専用で、走行台車からの報告を認めないアクセスポイント用時間帯と、走行台車からアクセスポイントへ報告するための台車用時間帯とを設け、
アクセスポイントは、アクセスポイント用時間帯に、送信権を確認するための信号を走行台車との間で交換せずに、指令を送信するための手段を備え、
走行台車は、台車用時間帯に、送信権を確認するための信号を他の走行台車との間で交換した上で、前記報告を送信するための送信手段を備えていることを特徴とする。
【0006】
この発明では、アクセスポイントからの指令と走行台車からの報告とが衝突すること、即ち複数のパケットが同時に送信されて受信不能になること、がない。またアクセスポイントは、専用の時間帯に指令を送信するので、RTS(送信する旨のメッセージ)あるいはCTS(受信準備が完了した旨のメッセージ)等の、送信権を確認するための信号を交換する必要がない。従って多数の走行台車に高速で指令を送信でき、指令の送信遅れに伴う制御遅れを小さくできる。
【0007】
好ましくは、台車用時間帯を複数のタイムスロットに分割すると共に、走行台車は複数のタイムスロットから1個をランダムに選択するための選択手段を備え、前記送信手段により選択したタイムスロット中に報告を送信する。このようにすると、1個のタイムスロット内で複数の走行台車からの報告が衝突する確率を小さくできる。またバックオフアルゴリズムのように、待時間の間継続して他の端末からのキャリアを検出しないことを条件とするのではないので、どの走行台車も送信しない時間が長くならない。従って多数の走行台車が短時間で報告でき、報告の遅れに伴う制御遅れを短くできる。
【0008】
特に好ましくは、走行台車は、選択したタイムスロットが到来した後、さらに待機する待時間をランダムに定めるための手段を備えて、前記待時間経過後に前記送信手段により報告を送信する。即ち、1個のタイムスロット内に送信しようとする走行台車の数は僅かなので、僅かな数の走行台車間の競合を解消すればよい。そのためには既存のバックオフアルゴリズム等で十分対応できる。
【0009】
なおバックオフアルゴリズムを用いず、例えば台車用時間帯を1024タイムスロットなどの、台車数に比べて充分多いスロットに分割しても良い。そして10ビットのタイムスロットデータの下位8ビットを有効とし、有効なタイムスロットが到来し、かつその時点でキャリアを検出していなければ、送信するようにしても良い。タイムスロットの数は充分多いので、同じタイムスロットに送信しようとする走行台車の数は僅かで、パケットの衝突は少ない。ここで、タイムスロットが到来した時点でキャリアを検出している場合、キャリアを検出しなくなるまで待って送信を開始するようにしたとする。するとキャリアを検出しなくなるまでの間に、複数の台車のタイムスロットが到来し、同時に送信を開始する可能性がある。そこでタイムスロットが到来した時点でキャリアを検出していると、次の自己のタイムスロットが到来するまで待機することが好ましい。10ビット中下位8ビットを有効とすると、送信のチャンスは4回である。ただしこの手法では、同じ台車用時間帯内に全ての走行台車が送信できる確率は、複数のタイムスロットとバックオフアルゴリズムの組み合わせよりもやや低い。
【図面の簡単な説明】
【0010】
【図1】実施例の走行台車システムのレイアウトを示す平面図
【図2】実施例でのアクセスポイントの配置と通信チャネルとを示す平面図
【図3】実施例での、走行台車、アクセスポイント、モーションコントローラ、及びシステムサーバの関係を示すブロック図
【図4】システムサーバでの処理を示すフローチャート
【図5】走行台車での処理を示すフローチャート
【図6】走行台車でのローミングに関する処理を示すフローチャート
【図7】走行台車がシステムサーバからの指令を受信できなかった際の、フェイルセーフ機構を示すフローチャート
【図8】システムサーバが走行台車からの報告を受信できなかった際の、フェイルセーフ機構を示すフローチャート
【図9】走行台車/システムサーバ間の通信のタイミングと、処理のタイミングとを示す図
【図10】システムサーバ/走行台車間の通信のタイミングを示す図で、1)はシステムサーバでの処理を示し、2)はモーションコントローラでの処理を、3),5)はアクセスポイントでの処理を、4),6)は走行台車群での処理を示し、7)は無線LANの割り当てを示す。
【図11】アクセスポイントから走行台車への通信を示す図
【図12】走行台車からアクセスポイントへの通信を示す図
【図13】走行台車からアクセスポイントへの送信アルゴリズムを示すフローチャート
【図14】台車からの送信が輻輳することを防止するための機構を示す図
【発明を実施するための形態】
【0011】
以下に本発明を実施するための最適実施例を示す。この発明の範囲は、特許請求の範囲の記載に基づき、明細書の記載とこの分野での周知技術とを参酌し、当業者の理解に従って定められるべきである。
【実施例】
【0012】
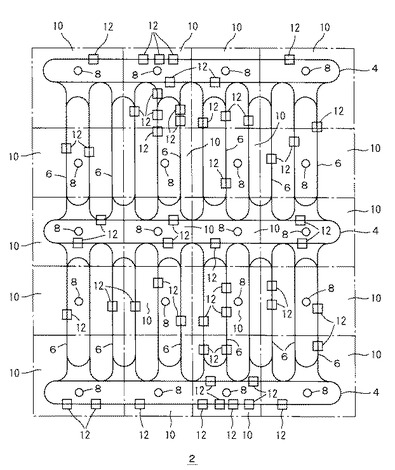
図1〜図14に、実施例の走行台車システム2を示す。図1はシステム2のレイアウトを示し、4はインターベイルートで、複数のイントラベイルート6間を接続し、これらのルート4,6の全体を10〜50個程度のエリア10に分割し、エリア10毎にアクセスポイント8を設ける。エリア10はアクセスポイント8の通信能力に比べて狭くし、具体的にはルート4,6の任意の地点で、走行台車12が少なくとも2個のアクセスポイント8と通信できるようにする。なお退避区間、メンテナンス区間などの、物品を搬送する通常の走行ルートから外れた区間では、1個のアクセスポイント8とのみ通信できるようにしても良い。
【0013】
12は走行台車で、ここでは天井走行車とするが、地上を有軌道で走行する有軌道台車、あるいは地上を無軌道で走行する無人搬送車などでもよい。14は地上LANで、アクセスポイント8とモーションコントローラ16並びにシステムサーバ18を接続し、システムサーバ18は、他のLANもしくは地上LAN14により、上位サーバ20に接続されている。上位サーバ20はシステムサーバ18に対して搬送などの要求を行い、システムサーバ18は複数の走行台車12の位置、分岐方向、速度などの状態を記憶し、少なくとも位置を記憶する。システムサーバ18は、例えば0.1sの制御周期、より一般的には0.01s〜0.3sの制御周期毎に、モーションコントローラ16とアクセスポイント8とを介し、走行台車12に指令を送信する。指令の内容は、次の制御周期での目標位置と分岐の方向、移載に関する指令などであり、これ以外に走行台車12の目標速度も指令しても良い。
【0014】
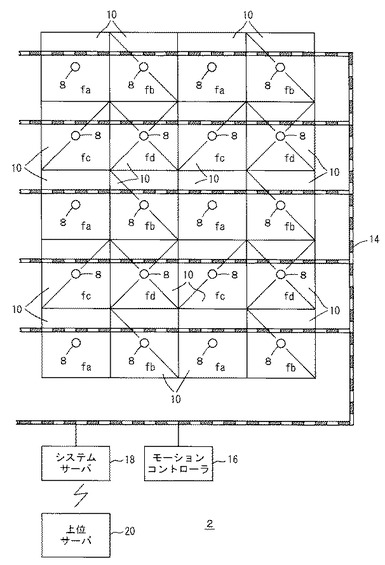
図2は、走行台車システム2でのエリア10とアクセスポイント8との配置を示す。前記のように、走行ルート上の全地点で、走行台車は複数のアクセスポイント8と通信可能である。なお物品を搬送する区間である通常走行ルート上でのみ、複数のアクセスポイント8と通信可能にしても良い。すると1個のアクセスポイント8がブレイクダウンしても、走行台車は走行を続行できる。実施例ではエリア10は例えば1辺あるいは直径が30m程度で、走行台車の台数は例えば上限が500台程度で、アクセスポイント8の個数は20程度である。アクセスポイント8当たりの走行台車12の台数は、上限が60台程度である。モーションコントローラ16は走行台車システム2の全体に対して1台設けるが、システムの規模が大きい場合、モーションコントローラ16を複数台設けても良い。
【0015】
エリア10毎に走行台車との通信チャネル、即ち使用する周波数帯等を変化させ、例えば4種類のチャネルfa〜fdを設ける。このようにすると、隣接するエリアの間で必ずチャネルが変化するように、エリア10を配置できる。そしてエリア10の境界位置と各エリアでのチャネルを、走行台車が記憶するマップに記載し、走行台車は絶対位置センサなどの適宜のセンサで現在位置を確認しながら走行する。従って走行台車12は、どのエリア10を走行しているかと、用いるべきチャネルの種類とを知ることができる。またエリアの境界に接近してきたことと、次のエリアのチャネルをマップから求めることができる。
【0016】
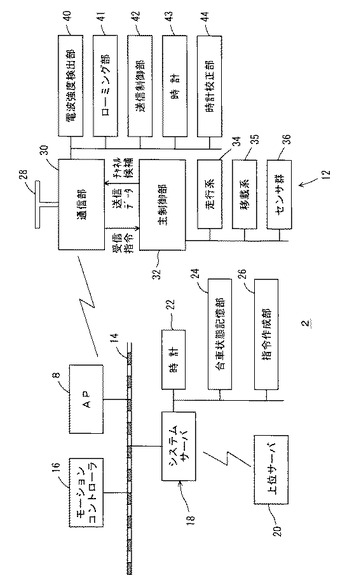
図3に走行台車12から上位サーバ20までの構成を示す。システムサーバ18は時計22を備え、この時計を走行台車システムの共通の基本時計とする。台車状態記憶部24は走行台車12の現在位置、速度、分岐の方向、移載に関するデータ、割付済みの指令などの台車の状態を記憶し、指令作成部26は走行台車毎に次の制御周期の終わりでの目標位置と分岐方向、移載に関するデータなどの指令を作成する。
【0017】
アクセスポイント8は通信可能範囲内の走行台車12と通信し、通信は100ms(100m秒)から成る制御周期単位で行い、制御周期の例えば最初にビーコンを送出して、アクセスポイント8が使用するチャネルなどを通知する。制御周期の最初の30ms間にアクセスポイント8から走行台車12への指令を送信し、次の40ms間に走行台車12からの報告などを受信し、最後の30msは予備とする。モーションコントローラ16は例えば20台のアクセスポイント8へ、システムサーバ18からの指令を送信し、アクセスポイント8からの報告をまとめてシステムサーバ18へ送信する。
【0018】
走行台車12は、アンテナ28と通信部30により、アクセスポイント8と通信し、指令を主制御部32へ引き渡し、主制御部32からシステムサーバ18への報告(送信データ)を受け取って送信する。また主制御部32は走行ルートのマップを記憶し、新たなエリアとの境界に接近すると、次のエリアのアクセスポイントからのビーコンを検出すること及びビーコン検出に用いるチャネルを通信部30へ入力する。
【0019】
主制御部32は走行系34と移載系35,並びにセンサ群36を制御する。走行系34では、図示しない走行モータをサーボ制御し、システムサーバ18から受信した目標位置に従って走行し、分岐する場合、システムサーバ18から指定された分岐方向に分岐する。移載系35は、昇降台を昇降させる昇降モータと、昇降台等を横移動させる横送りモータ、並びにこれらを鉛直軸回りに回動させて物品の向きを整える回動モータなどを備えている。そして主制御部32はシステムサーバ18から受信した移載の指令に従って、移載系35を駆動する。センサ群36は走行台車の絶対位置を検出する絶対位置センサ、先行台車を検出する距離センサ、バッファあるいはロードポートなどでの先入品の有無を検出する先入品センサ、さらに物品に取り付けたRFIDなどを読み取るRFIDリーダなどから成る。主制御部32はセンサ群36により周囲の状態を検出し、必要に応じてそれらのデータをシステムサーバ18へ送信する。
【0020】
通信部30は電波強度検出部40を備え、アクセスポイント8からの電波強度を求める。ローミング部41は、新たなアクセスポイント8へのローミングを制御する。送信制御部42はアクセスポイント8への送信を制御し、乱数発生部を備えて、送信のための自己の割り当て時刻を乱数(例えば0〜39の40段階で、好ましくは8〜64段階)で発生させ、バックオフ時間を乱数(0〜15の例えば16段階)で発生させる。時計43は、システムサーバ18の時計22に合わせた時計で、時刻は例えば1ms単位で、図示しないクロックにより時刻をカウントする。時計校正部44は、システムサーバ18からのタイムスタンプに従い、時計43の時刻データを校正する。
【0021】
図4にシステムサーバ18での処理を示す。システム全体で時計を合わせるため、タイムスタンプをシステムサーバが作成し、モーションコントローラとアクセスポイントを介して、制御周期の最初の30msの間に、指令と共に走行台車に送信することを考える。するとシステムサーバからアクセスポイントまでの送信時間を無視しても、タイムスタンプの作成から走行台車への送信までに、最大30msの誤差が生じる。このため数100台の走行台車に対し、制御周期毎に意味のあるタイムスタンプを送信することは困難である。そこでシステムサーバは最大500台程度の走行台車のうち制御周期毎に10台程度、例えば5〜50台を選択し、制御周期毎に選択した走行台車のみに対して、時計を校正する。制御周期を0.1s、走行台車を500台とすると、制御周期毎に10台ずつ選択することにより、例えば5s毎に正確なタイムスタンプを送信できる。具体的には、選択した走行台車への指令のパケットに時刻データ(タイムスタンプ)を書き込み、他の走行台車に対しては時刻データを無効としておく。そして選択した走行台車への指令のパケットが、制御周期の最初に走行台車へ送信されるように、モーションコントローラへのパケットの送信順序を制御する。
【0022】
システムサーバは管理下の走行台車の状態を記憶し、制御周期毎に走行台車の位置などの台車の状態報告を受信し、報告に従って台車の状態データを更新する。なお台車の状態の受信に失敗した場合、該当台車に関して状態データを更新しない。台車への指令プロセスでは、台車の状態データと上位サーバからの搬送の要求に従い、台車への指令を作成する。作成した指令をモーションコントローラとアクセスポイントを介して制御周期毎に走行台車へ送信する。
【0023】
図5,図6に走行台車側のプロセスを示す。時計プロセスでは走行台車は自己のクロックを用いて1ms毎に時計を進める。そしてアクセスポイントからの指令中にタイムスタンプが付加されている場合、受信した時刻データ(タイムスタンプ)と、自己の時計での時刻データとの重み付き平均で時計を校正する。自己の時計の重みとシステムサーバの時計の重みの比を、例えば1:1〜5:1とする。このようにすると5s毎にタイムスタンプを受信するものとして、10s〜40s程度の時定数で走行台車の時計が校正される。走行台車の時計を1回のタイムスタンプでは部分的にしか校正しないのは、アクセスポイントから走行台車へのタイムスタンプの送信遅れなどによる影響を小さくするためである。制御周期のどの時点でアクセスポイントが送信データが送信するかは毎回変動するが、走行台車の時計を少しずつ書き換えると、アクセスポイントからの送信遅れの影響などを小さくできる。
【0024】
指令の受信プロセスでは、アクセスポイントから指令を受信すると、受信確認パケットを返信し、指令に従って次の制御周期での目標位置を更新する。なお指令及び報告の再送は例えば2回までとし、1制御周期で最初の送信を含めて3回までの送信を認める。そして仮に3回とも指令の受信に失敗した場合、目標位置等を更新しないので、走行台車は減速する。
【0025】
走行台車からの送信プロセスは、制御周期の開始から30ms間待機し、この時点でシステムサーバへの状態報告パケットを作成する。全ての走行台車はシステムサーバの時計に合わせた時計を持っているので、制御周期の開始から同じ時間だけ経過した時点で一斉に状態報告パケットを作成する。走行台車はアクセスポイントへの送信に割り当てられた40msを例えば40分割し、このうち1msを自己の割り当て時間として、乱数により割り当て時間を選ぶ。そして割り当て時間が到来するまで待機し、割り当て時間に達すると、バックオフアルゴリズムでパケットの衝突を防止しながら、状態報告パケットを送信する。
【0026】
図6に走行台車でのローミングの処理を示す。走行台車はマップ上の自己の位置を知っており、次に進入するエリアでのチャネルも知っている。そしてエリアの境界が近づく、もしくは通信中のアクセスポイントからの電波が弱くなると、ローミングを開始する。ローミングではマップから次に進入するエリアのチャネルを求め、そのチャネルでビーコンを検出する。なおビーコンは例えば制御周期の最初に送信される。そしてビーコンの電波強度が充分であればローミングし、強度が不足する場合、残る2チャンネルに対するローミングを試みる。システムが用いるチャネルが4種類に制限され、どのチャネルでローミングを試みるべきかがマップから分かるので、簡単にローミングできる。
【0027】
走行ルートの各地点で2種類以上のチャネルで通信可能なので、アクセスポイントにトラブルが発生しても、他のアクセスポイントとの通信を維持できる。ローミングは例えば走行台車からアクセスポイントへの送信に割り当てられた時間帯に、プローブ要求をアクセスポイントへ送信し、アクセスポイントからプローブ許可を受信することにより完了する。なお状態報告パケットにプローブ要求を追加して送信しても良い。またプローブ要求を行わずに、走行台車から台車のID、目的地、搬送指令のID、現在位置、速度、分岐方向などの報告を送信し、アクセスポイントが新たな台車から報告を受けたことを確認することにより、ローミングを完了しても良い。
【0028】
図7に、走行台車がシステムサーバからの指令の受信に失敗した際の、フェイルセーフ機構を示す。アクセスポイントが指令を送信しても走行台車からの確認が得られない場合、2回まで再送する。従って走行台車が指令の受信に失敗する確率は元々極めて小さい。それでも指令を受信できなかった場合、台車は前回の制御周期での目標位置に従って走行する。従って多くの場合、台車はオーバーランして減速する。制御周期は0.1s程度なので、走行台車の最大走行速度を4m/sとしても、走行台車がオーバーランする距離は最大で40cm程度である。なおシステムサーバは、この程度のオーバーランでは台車間の干渉が生じないように、車間距離を定めて目標位置を指令している。そして次の制御周期で指令の受信に成功すると、走行台車はサーバの制御下に戻ることができる。
【0029】
図8に、システムサーバ側が走行台車からの報告を受信できなかった際のフェイルセーフ機構を示す。報告がアクセスポイントにより受信できなかった場合、台車は合計3回まで報告する。3回とも失敗した場合、サーバは前の制御周期での台車の位置などの状態を更新せずに記憶する。この結果、システムサーバのデータ上で、後行の走行台車との車間距離が縮まり、サーバは、後行の走行台車に対し干渉を回避するように目的位置を指令する。そして次の制御周期で台車の位置等を受信することができれば、台車をサーバによるフィードバック制御下に戻すことができる。
【0030】
図9に、走行台車からシステムサーバへの報告と、システムサーバからの指令並びに走行台車による実行のタイミングを示す。制御周期は100msで、図の下部に時刻を示す。複数台の走行台車は一斉に、例えば30msの時点で、システムサーバへの報告を作成し、30ms〜70ms等の間に分散して指令を報告する。報告はアクセスポイントからモーションコントローラを介してシステムサーバへ送られ、システムサーバは次の制御周期(図の制御周期N)での指令を作成し、モーションコントローラからアクセスポイントへ指令を送信する。報告の転送からアクセスポイントへの指令の送信を70msから100msまでに処理する。アクセスポイントは次の制御周期Nの例えば最初の30ms間に走行台車に指令を送信し、走行台車は制御周期N+1でその指令を実行する。なお制御周期の始まりと終わりを、走行台車が報告パケットを作成する時点から次の報告を作成する時点までとし、指令を受信すると直ちに指令の実行を開始してもよい。
【0031】
図10に、システムサーバと走行台車との通信のタイミングなどを示し、例えば1制御周期は100msで、このうち30msをアクセスポイントから走行台車への送信に、次の40msを走行台車からアクセスポイントへの通信に、残る30msを予備とする。そしてアクセスポイントは周期の最初の30msの間に最大60台程度の走行台車に指令を送信し、走行台車は40msの割り当て時間を40分割し、送信を開始する自己の割り当て時間を、例えば1msずつランダムに選択する。そしてこの1msの範囲で、バックオフアルゴリズムにより、走行台車間の送信パケットの衝突を防止する。
【0032】
図11にアクセスポイントから走行台車への送信の例を示し、最初にビーコンを送出し、続いて走行台車毎のデータを送信する。ビーコンの発生後、例えば30ms程度の時間はアクセスポイントからの送信に割り当てられた時間である。この間、RTS(送信を開始する旨のメッセージ),CTS(受信の準備ができた旨のメッセージ)などによる、パケットの衝突の防止制御は不要である。そして走行台車側は指令を受信すると、その都度ACK(受信確認のメッセージ)を送出する。図11のD10,D20,D30などは、個別の走行台車毎の指令である。
【0033】
図12に、走行台車からアクセスポイントへの送信に割り当てた40msのうちの1タイムスロット(1ms)での処理を示す。なおこのタイムスロットを割り当て時間と呼ぶ。アクセスポイント当たりの走行台車の台数は最大で60台程度で、送信時間を40スロットに分割するので、1タイムスロット当たりの走行台車の台数は最大で平均約1.5で、考慮する必要があるのは1つのタイムスロットに5台程度の走行台車が通信する場合までである。例えば5台の台車が1つのタイムスロットを用いる確率は、平均値を1.5台として、1台の場合の約1/24である。1タイムスロット内で複数の走行台車が送信する場合、バックオフアルゴリズムで送信の順序を規制する。即ちタイムスロットが到来すると、各走行台車は0〜15の範囲で乱数を発生させ、キャリアが無い時間がDIFS(IEEE802.11で規定された待時間)とさらにバックオフ時間だけ続くと、RTS信号を送出する。バックオフアルゴリズムで用いる乱数を16通りとすると、2台の台車が同じバックオフ時間を持つ確率は僅かである。そしてRTSに対して、アクセスポイントからのCTSを受信できると、データの送信を開始し、アクセスポイントはデータを受信できると確認信号ACKを送出する。
【0034】
図13に走行台車からアクセスポイントへの送信制御を示す。送信に割り当てられた時間は40msで、自己の割り当て時間をランダムに1ms幅で選択する。そして自己の割り当て時間が到来するまで待機し、到来するとバックオフ時間をランダムに設定する。バックオフ時間の間継続してキャリアを検出しないとRTSを送信し、CTSを受信するとデータを送信する。続いて確認信号ACKを受信できると送信が終わる。ACKの受信まで進めない場合、バックオフ時間をランダムに再設定して再度トライする。なおパケットの衝突などがない場合、DIFSからACKまでの時間は、走行台車1台分の報告に対し、例えば400μs程度である。従って1タイムスロット当たり3台以上の走行台車が存在すると、1msの間に送信が終わらないことがある。この場合、未送信の走行台車は次のタイムスロットでも送信を続行する。そして次のタイムスロットを用いる予定の走行台車は、この間バックオフアルゴリズムにより送信を待機する。
【0035】
図14に実施例の送信アルゴリズムと、単なるバックオフアルゴリズムとの比較を示す。ここでは、1アクセスポイント当たり60台の走行台車が存在するとの状況で検討する。通常のバックオフアルゴリズムでは、送信までの待機時間は例えば0〜15の16区分で、16区分に60台の台車を収容すると、大部分の送信パケットが衝突し、再送回数が増す。再送回数を少なくするため、バックオフ時間の範囲を拡大すると、平均のバックオフ時間が増し、通信効率が低下する。
【0036】
これに対して実施例では、40msの時間を1msずつに分割するので、1つの割り当て時間当たりの送信は平均して1.5回である。1.5回分の送信を衝突無しに制御すれば良いので、バックオフ時間を短くできる。また仮に1msの割り当て時間内に通信が完了しない場合でも、次の割り当て時間を引き続いて使うことができる。これらの結果、通信の成功率が増す。1つの割り当て時間内では、送信の衝突をバックオフアルゴリズムで回避するので、衝突とこれに伴う再送とを少なくできる。
【符号の説明】
【0037】
2 走行台車システム
4 インターベイルート
6 イントラベイルート
8 アクセスポイント
10 エリア
12 走行台車
14 地上LAN
16 モーションコントローラ
18 システムサーバ
20 上位サーバ
22 時計
24 台車状態記憶部
26 指令作成部
28 アンテナ
30 通信部
32 主制御部
34 走行系
35 移載系
36 センサ群
40 電波強度検出部
41 ローミング部
42 送信制御部
43 時計
44 時計校正部
fa〜fd チャネル
【特許請求の範囲】
【請求項1】
システムサーバとアクセスポイントとを地上LANを介して接続し、前記アクセスポイントから複数台の走行台車へ制御周期毎に指令を無線で送信し、複数台の走行台車からアクセスポイントへ前記制御周期毎に報告を無線で送信するシステムであって、
前記制御周期中に、アクセスポイントからの送信専用で、走行台車からの報告を認めないアクセスポイント用時間帯と、走行台車からアクセスポイントへ報告するための台車用時間帯とを設け、
アクセスポイントは、アクセスポイント用時間帯に、送信権を確認するための信号を走行台車との間で交換せずに、指令を送信するための手段を備え、
走行台車は、台車用時間帯に、送信権を確認するための信号を他の走行台車との間で交換した上で、前記報告を送信するための送信手段を備えていることを特徴とする、走行台車システム。
【請求項2】
台車用時間帯を複数のタイムスロットに分割すると共に、走行台車は複数のタイムスロットから1個をランダムに選択するための選択手段を備え、前記送信手段により選択したタイムスロット中に報告を送信するように構成したことを特徴とする、請求項1の走行台車システム。
【請求項3】
走行台車は、選択したタイムスロットが到来した後、さらに待機する待時間をランダムに定めるための手段を備えて、前記待時間経過後に前記送信手段により報告を送信するように構成したことを特徴とする、請求項2の走行台車システム。
【請求項1】
システムサーバとアクセスポイントとを地上LANを介して接続し、前記アクセスポイントから複数台の走行台車へ制御周期毎に指令を無線で送信し、複数台の走行台車からアクセスポイントへ前記制御周期毎に報告を無線で送信するシステムであって、
前記制御周期中に、アクセスポイントからの送信専用で、走行台車からの報告を認めないアクセスポイント用時間帯と、走行台車からアクセスポイントへ報告するための台車用時間帯とを設け、
アクセスポイントは、アクセスポイント用時間帯に、送信権を確認するための信号を走行台車との間で交換せずに、指令を送信するための手段を備え、
走行台車は、台車用時間帯に、送信権を確認するための信号を他の走行台車との間で交換した上で、前記報告を送信するための送信手段を備えていることを特徴とする、走行台車システム。
【請求項2】
台車用時間帯を複数のタイムスロットに分割すると共に、走行台車は複数のタイムスロットから1個をランダムに選択するための選択手段を備え、前記送信手段により選択したタイムスロット中に報告を送信するように構成したことを特徴とする、請求項1の走行台車システム。
【請求項3】
走行台車は、選択したタイムスロットが到来した後、さらに待機する待時間をランダムに定めるための手段を備えて、前記待時間経過後に前記送信手段により報告を送信するように構成したことを特徴とする、請求項2の走行台車システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−162343(P2011−162343A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−30166(P2010−30166)
【出願日】平成22年2月15日(2010.2.15)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月15日(2010.2.15)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]