
走行履歴情報生成装置、方法およびプログラム
【課題】走行車線を維持して走行した車両が存在しない場合であっても走行履歴情報を生成することが可能な技術の提供。
【解決手段】車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録し、解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得し、前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する。
【解決手段】車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録し、解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得し、前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行履歴情報を生成する技術に関する。
【背景技術】
【0002】
従来、道路区間毎の車速や旅行時間などを示す走行履歴情報を車両から収集する技術が知られている。例えば、特許文献1には、道路区間上の走行車線毎の走行履歴情報を収集するため、車両が走行車線を維持して走行したと判定された場合に走行履歴情報を収集する技術が開示されている。また、特許文献2には、複数車線の道路を走行する複数の車両から取得された車両情報を、速度のレベルに応じた複数のクラスに分類し、分類された車両情報がどの車線に対応するか判定する技術が開示されている。そして、特許文献2には、車線変更が行われている場合には車線別の交通情報を生成しない構成や、車線変更が行われた前後で区間を別区間とし、区間毎に平均時速を算出する構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−176243号公報
【特許文献2】特開2010−102575号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された従来の技術においては、車両が走行車線を維持して走行したと判定された場合に走行履歴情報を収集するため、走行車線を維持して走行した車両が存在しない場合には走行履歴情報を収集することができない。また、特許文献2に開示された従来の技術において、車線変更が行われている場合に車線別の交通情報を生成しない構成であると、やはり、走行車線を維持して走行した車両が存在しない場合には走行履歴情報を収集することができない。さらに、特許文献2に開示された従来の技術において、車線変更の前後で区間を別区間としても、車線を維持して走行した車両が存在しない場合には、やはり、情報が存在しない区間が発生してしまう。
本発明は、上記課題にかんがみてなされたもので、走行車線を維持して走行した車両が存在しない場合であっても走行履歴情報を生成することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録し、当該記録媒体を参照して解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す走行履歴情報を解析対象走行履歴情報として取得し、当該解析対象走行履歴情報に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する。すなわち、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から解析対象区間の全部において車両が前記解析対象車線を走行した場合の走行履歴を推定する。この構成によれば、解析対象車線を維持して走行した車両が存在しない場合であっても、解析対象区間の一部において解析対象車線を走行した車両が存在すれば当該解析対象車線についての走行履歴情報を生成することができる。
【0006】
ここで、走行履歴情報記録手段は、車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録することができればよく、例えば、複数の車両から送信される走行履歴情報を通信によって取得し、記録媒体に記録しておき、当該走行履歴情報を解析の基になる情報として利用可能な状態としておけばよい。走行履歴情報は道路上を走行した車両の動作等の履歴を示す情報や動作等の履歴から特定される情報であれば良く、例えば、車両の車速や位置の履歴を示す情報や、車速や位置から特定される区間毎の旅行時間を示す情報等が走行履歴情報となり得る。
【0007】
解析対象走行履歴情報取得手段は、解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す走行履歴情報を解析対象走行履歴情報として取得することができればよい。すなわち、道路上に予め設定された道路区間の中の任意の区間を解析対象区間とし、当該解析対象区間上に1個以上存在する車線の中の任意の車線を解析対象車線とする。そして、当該解析対象区間の全部(解析対象区間の開始位置から終了位置までの全区間)において解析対象車線を走行した車両の走行履歴情報は記録媒体に蓄積されていないが、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報が記録媒体に蓄積されている場合に、当該走行履歴情報を解析対象走行履歴情報として取得すればよい。
【0008】
走行履歴情報生成手段は、解析対象走行履歴情報に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成することができればよい。すなわち、道路上における車両は車速や位置が徐々に変化するなど連続的な動作を行うため、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から、走行履歴情報が存在しない解析対象車線上の位置における走行履歴を推定することができる。そこで、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴を推定すれば、解析対象車線を維持して走行した車両が存在しない場合であっても、解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成することができる。
【0009】
さらに、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する構成の例として補完を行う構成を採用しても良い。例えば、解析対象車線内の位置に解析対象走行履歴情報が対応づけられていない無情報区間の走行履歴を解析対象走行履歴情報に基づいて補完することによって解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴を生成する構成を採用可能である。すなわち、解析対象走行履歴情報は位置毎の走行履歴を示しているため、当該位置を参照すれば解析対象車線内の各位置に解析対象走行履歴情報が対応づけられているか否かを判定することができる。
【0010】
そして、解析対象車線内の位置に解析対象走行履歴情報が対応づけられてない場合には、その区間は解析対象走行履歴情報によって走行履歴が示されていない区間となるため当該区間を無情報区間とする。当該無情報区間の走行履歴を示す解析対象走行履歴情報は存在しないが、無情報区間の周囲(車線上での進行方向前方と後方との一方または双方)には解析対象走行履歴情報が存在する。そこで、無情報区間の走行履歴を解析対象走行履歴情報に基づいて補完すれば、解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成することが可能である。
【0011】
ここで、補完は種々の手法によって行うことが可能である。例えば、無情報区間においても解析対象走行履歴情報が示す車両の動作が連続的に行われると推定し、当該推定された動作に基づいて無情報区間の走行履歴情報を生成する構成を採用可能である。なお、無情報区間にて行われる動作として推定される動作は1個の動作でも良いし、2個以上の動作であっても良い。2個以上の動作が推定される場合には、2個以上の動作の組み合わせ(例えば、平均値や重みづけ加算)に基づいて無情報区間の走行履歴を生成すればよい。また、ここでは、少なくとも無情報区間の走行履歴を補完によって生成することができればよく、補完される区間が無情報区間の前後に及んでも良い。例えば、解析対象走行履歴情報が対応づけられた位置を含めて動作が滑らかに変化して無情報区間の動作に繋がるように補完を行って走行履歴情報を生成する構成等を採用可能である。
【0012】
さらに、走行履歴情報に車速が含まれる場合に走行履歴情報を生成する構成の例として、車速の変化に着目して解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する構成としても良い。例えば、解析対象走行履歴情報が示す車速の基準単位あたりの変化が所定の一定値である走行履歴流用区間と車速の基準単位あたりの変化が所定の一定値ではない走行履歴補完区間とを特定し、解析対象走行履歴情報が示す走行履歴流用区間における車速と解析対象走行履歴情報が示す走行履歴補完区間における車速とに基づいて走行履歴補完区間における推定車速を特定し、当該推定車速を走行履歴補完区間における走行履歴として走行履歴情報を生成する構成を採用可能である。
【0013】
すなわち、車速の基準単位あたりの変化が一定である場合、運転者が車線変更などの偶発的な動作を行っていない可能性が高い。そこで、車速の基準単位あたりの変化が所定の一定値である場合には運転者が車線変更などの偶発的な動作を行っていない可能性が高いとみなし、車速の基準単位あたりの変化が所定の一定値である区間(走行履歴流用区間)の解析対象走行履歴情報はそのまま流用できるとみなす。また、車速の基準単位あたりの変化が所定の一定値ではない場合には運転者が車線変更などの偶発的な動作を行った可能性が高いとみなし、車速の基準単位あたりの変化が所定の一定値ではない区間(走行履歴補完区間)においては走行履歴情報を補完して推定車速を特定することとする。そして、走行履歴補完区間に関しては、走行履歴流用区間における車速と走行履歴補完区間における車速との双方に基づいて推定車速を特定する。この結果、偶発的な動作を行った可能性の高い走行履歴補完区間の車速が、偶発的な動作を行っていない可能性の高い走行履歴流用区間の車速によって補正され、妥当な推定車速を特定することが可能になる。
【0014】
なお、走行履歴補完区間は、車速の基準単位あたりの変化が所定の一定値ではない区間の前後の区間を含んでいても良い。例えば、走行履歴補完区間の前後に上述の無情報区間が接続された状態である場合、当該無情報区間を含めた区間を走行履歴補完区間とし、走行履歴補完区間内の無情報区間ではない区間における解析対象走行履歴情報が示す車速から当該無情報区間の車速を特定し、推定車速の特定に利用する構成としても良い。また、走行履歴流用区間における車速は基準単位(単位時間あるいは単位距離)あたりの変化が所定の一定値となる車速であれば良く、基準単位あたりの車速の変化が0の一定車速であっても良いし、基準単位あたりの車速の変化が0ではない一定値(例えば、一定加速度で実現される車速の変化)であってもよい。むろん、基準単位あたりの車速の変化が所定の一定値から所定の誤差範囲内の値である場合に車速の変化が一定とみなす構成としても良い。
【0015】
走行履歴補完区間における車速は基準単位(単位時間あるいは単位距離)あたりの変化が所定の一定値ではない車速であれば良く、走行履歴流用区間の車速に基づいて特定されればよい。例えば、走行履歴流用区間における車速の基準単位あたりの変化が0である場合、走行履歴補完区間における車速は基準単位あたりの変化が0ではない車速であり、基準単位あたりの車速の変化が0ではない一定値である場合や車速の変化が定数とならない場合を含む。また、走行履歴流用区間における車速の基準単位あたりの変化が0ではない一定値である場合、走行履歴補完区間における車速は基準単位あたりの変化が当該一定値ではない車速となり、例えば、車速の変化が定数とならない場合の車速が該当する。
【0016】
さらに、解析対象車線内に、走行履歴補完区間と、当該走行履歴補完区間の後に存在する第1走行履歴流用区間と、走行履歴補完区間の前に存在する第2走行履歴流用区間と、が含まれる場合に、走行履歴補完区間において解析対象走行履歴情報が示す第1走行履歴流用区間の車速から解析対象走行履歴情報が示す第2走行履歴流用区間の車速に推移する第1推定車速と、解析対象走行履歴情報が示す走行履歴補完区間の車速にて走行した場合の第2推定車速とを特定し、第1推定車速から第2推定車速までの車速のいずれかが推定車速であるとみなす構成としても良い。
【0017】
すなわち、第1走行履歴流用区間の車速から第2走行履歴流用区間の車速に直接的に変化した場合の車速に相当する第1推定車速と、走行履歴補完区間の車速から推定される第2推定車速との双方に基づいて推定車速を特定する。この構成により、偶発的な動作を行った可能性の高い場合の第2推定車速が、偶発的な動作を行っていない可能性の高い場合の第1推定車速によって補正され、妥当な推定車速を特定することが可能になる。なお、推定車速は第1推定車速から第2推定車速までの車速のいずれかであれば良く、例えば、第1推定車速と第2推定車速との中間の車速を推定車速とすれば、第1推定車速と第2推定車速との平均値を推定車速とすることになる。
【0018】
さらに、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づける構成としても良い。すなわち、走行履歴補完区間における車速は、運転者が車線変更などの偶発的な動作を行った場合の車速である可能性が高いものの、その可能性は走行履歴補完区間の長さに依存し得る。例えば、走行履歴補完区間が長い場合には、走行履歴補完区間が短い場合より長距離に渡って車速の基準単位あたりの変化が所定の一定値ではないことになり、当該車速の基準単位あたりの変化が偶発的な動作の結果である可能性は相対的に低くなる。
【0019】
そこで、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが長くなるほど推定車速が第2推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行った可能性に応じて推定車速を特定することが可能になる。また、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づけ、走行履歴補完区間の長さが短くなるほど推定車速が第1推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行っていない可能性に応じて推定車速を特定することが可能になる。
【0020】
さらに、本発明のように、解析対象区間の一部において解析対象車線を走行した車両の走行履歴に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置、走行履歴の管理システムや方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0021】
【図1】走行履歴情報生成装置のブロック図である。
【図2】補完が行われる区間と車速とを説明する図である。
【図3】走行履歴情報生成処理を示すフローチャートである。
【発明を実施するための形態】
【0022】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)走行履歴情報生成装置の構成:
(2)走行履歴情報生成処理:
(3)他の実施形態:
【0023】
(1)走行履歴情報生成装置の構成:
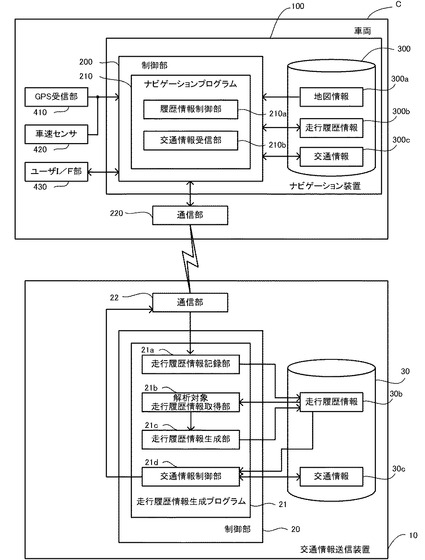
図1は、車両Cに備えられたナビゲーション装置100と走行履歴情報の管理センターに設置された走行履歴情報生成装置10とを含むシステムの構成を示すブロック図である。ナビゲーション装置100は道路を走行する複数の車両Cに搭載されており、当該ナビゲーション装置100はCPU,RAM,ROM等を備える制御部200と記録媒体300とを備えており、当該記録媒体300やROMに記憶されたプログラムを制御部200で実行することができる。本実施形態において制御部200は、このプログラムの一つとしてナビゲーションプログラム210を実行可能である。
【0024】
さらに、車両Cは、通信部220とGPS受信部410と車速センサ420とユーザI/F部430とを備えている。通信部220は、無線通信を行うための回路にて構成され、制御部200は通信部220を制御して走行履歴情報生成装置10と通信を行うことができる。GPS受信部410は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両Cの現在位置を算出するための情報を出力する。制御部200は、この信号を取得して車両Cの現在位置を取得する。車速センサ420は、車両Cが備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両Cの速度を取得する。車速センサ420は、GPS受信部410の出力信号から特定される車両Cの現在位置を補正するなどのために利用される。また、車両Cの現在位置は、当該車両Cの走行軌跡および地図情報300aに基づいて適宜補正される。
【0025】
地図情報300aは予め決められた区画(メッシュ)毎に定義されて記録媒体300に記録されている。当該地図情報300aには車両Cが走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間データ、ノード同士の連結を示すリンクデータ、走行予定経路の目的地となり得る施設を示す施設データ等が含まれている。制御部200は、地図情報300aが示すノードデータやリンクデータに基づいてリンクに相当する道路区間を特定し、各道路区間上での車両Cの位置を特定することができる。なお、車両Cの位置を示す情報を取得するための構成は図1に示す構成に限定されず、車速センサ420以外のセンサも併用する構成としてもよい。例えば、車両Cの現在位置をジャイロセンサ等の出力信号に基づいて補正する構成等を採用可能である。
【0026】
ユーザI/F部430は、ユーザが指示を入力し、またはユーザに各種の情報を提供するためのインタフェース部であり、図示しない表示部やボタン、スピーカー等を備えている。制御部200は、ナビゲーションプログラム210の処理により、ユーザI/F部430を介して走行経路や走行経路に関する交通情報等を案内する。
【0027】
ナビゲーションプログラム210は履歴情報制御部210aおよび交通情報受信部210bを備えており、制御部200は、履歴情報制御部210aの処理により車両Cの走行中に走行履歴情報300bを取得し走行履歴情報生成装置10に対して送信する。すなわち、制御部200は、履歴情報制御部210aの処理により、車速センサ420等によって各道路区間上の各位置における車両Cの車速を示す走行履歴情報300bを生成し、記録媒体300に記録する。さらに、制御部200は、履歴情報制御部210aの処理により、通信部220を介して所定のタイミングで走行履歴情報300bを走行履歴情報生成装置10に対して送信する。
【0028】
また、制御部200は、交通情報受信部210bの処理により、通信部220を介して所定のタイミングで交通情報の送信要求を走行履歴情報生成装置10に対して送信する。なお、交通情報の送信要求には車両Cの現在位置を示す情報が含まれ、走行履歴情報生成装置10は当該送信要求に応じて当該現在位置の車両Cが必要とする交通情報を送信対象として設定して、設定された交通情報30cを送信する。交通情報30cが送信されると、制御部200は交通情報受信部210bの処理により通信部220を介して当該交通情報30cを受信し、交通情報300cとして記録媒体300に記録する。なお、本実施形態において、交通情報300cはノードデータとリンクデータとによって特定される道路区間毎の渋滞を示す渋滞情報(例えば、渋滞度等)であり、車両Cから送信された走行履歴情報300bに基づいて作成された情報である。
【0029】
走行履歴情報生成装置10は、CPU,RAM,ROM等を備える制御部20と記録媒体30とを備えており、制御部20は当該記録媒体30やROMに記録されたプログラムを実行することができる。さらに、走行履歴情報生成装置10は通信部22を備えている。通信部22は、無線通信を行うための回路にて構成され、制御部20は通信部22を制御して車両Cと通信を行うことができる。
【0030】
本実施形態において制御部20は、記録媒体30に記録された走行履歴情報生成プログラム21を実行可能であり、制御部20は、当該走行履歴情報生成プログラム21の処理により、走行履歴情報300bを受信し、また、交通情報30cを送信する。
【0031】
走行履歴情報生成プログラム21は、走行履歴情報記録部21aと解析対象走行履歴情報取得部21bと走行履歴情報生成部21cと交通情報制御部21dとを備えている。走行履歴情報記録部21aは、車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、走行履歴情報記録部21aの処理により、車両Cと同様の構成を備える任意の車両(車両Cを含む)から所定のタイミングで送信される走行履歴情報300bを、通信部22を介して受信し、走行履歴情報30bとして記録媒体30に記録する。この結果、各道路区間上の各位置における任意の車両の車速を示す走行履歴情報が走行履歴情報30bとして記録媒体30に記録される。
【0032】
解析対象走行履歴情報取得部21bは、解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す走行履歴情報を解析対象走行履歴情報として取得する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、地図情報300aと同様の道路区間のそれぞれを解析対象区間とし、各道路区間に存在する車線のそれぞれを一つずつ解析対象車線と仮定した場合に、解析対象区間の全部において解析対象車線を走行した車両の走行履歴情報30bは記録媒体30に蓄積されていないが、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報30bが記録媒体30に蓄積されている場合に、当該走行履歴情報30bを解析対象走行履歴情報として取得する。
【0033】
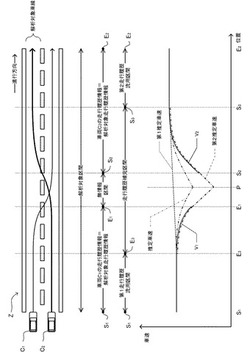
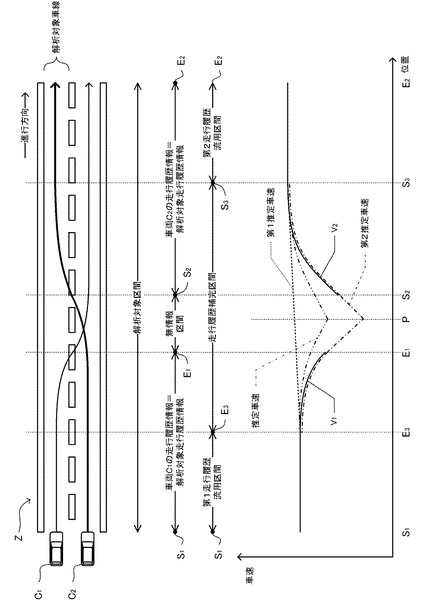
図2の上部においては、ある道路区間Zを模式的に示している。道路区間Zにおいては車線が2個存在するため、当該道路区間Zが解析対象区間となる場合、2個の車線のそれぞれが解析対象車線となり得る。本明細書においては図2を参照する際には、図2の進行方向に向かって左側の車線が解析対象車線である場合の例について説明する。図2に示す例において、車両C1が細い実線の矢印のように走行し、車両C2が太い実線の矢印のように走行した場合、位置S1から位置E1までの区間における車両C1の走行履歴情報30bが解析対象走行履歴情報となり、位置S2から位置E2までの区間における車両C2の走行履歴情報30bが解析対象走行履歴情報となる。なお、解析対象車線を走行した車両が車両C1および車両C2のみである場合、位置E1から位置S2までの区間は解析対象走行履歴情報が存在しない無情報区間となる。
【0034】
走行履歴情報生成部21cは、解析対象走行履歴情報に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する機能を制御部20に実現させるモジュールである。本実施形態において、制御部20は、解析対象走行履歴情報が示す車速の基準単位あたりの変化が所定の一定値ではない走行履歴補完区間(無情報区間が存在する場合には無情報区間を含む)とし、走行履歴補完区間における車速を解析対象走行履歴情報に基づいて補完することによって、解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報30bを生成する。なお、当該補完の詳細は後述する。
【0035】
交通情報制御部21dは、走行履歴情報30bから交通情報30cを生成するとともに、送信要求を行った車両Cに当該交通情報30cを送信する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、各道路区間の各車線についての車速を示す走行履歴情報30bと各道路区間の長さとに基づいて各道路区間の平均旅行時間を算出する。そして、当該平均旅行時間と予め決められた閾値とを比較することによって各道路区間における平均旅行時間が長いほど渋滞の程度が大きくなるように道路区間毎の渋滞度を特定して交通情報30cとする。むろん、ここで渋滞度の特定は日時毎や時間帯毎に行っても良い。さらに、制御部20が、通信部22を介して車両Cからの交通情報の送信要求を受け付けると、当該送信要求によって要求された範囲の交通情報30cを抽出し、通信部22を介して当該交通情報30cを車両Cに対して送信する。
【0036】
以上の構成によれば、解析対象車線を維持して走行した車両が存在しない場合であっても、解析対象区間の一部において解析対象車線を走行した車両が存在すれば当該解析対象車線についての走行履歴情報30bを生成することが可能になる。従って、車両の走行頻度が少ない道路区間であっても交通情報30cが特定可能である可能性が高くなり、交通情報30cが存在しない道路区間の発生を抑制しながら交通情報30cの送信システムを運用することが可能である。
【0037】
(2)走行履歴情報生成処理:
次に走行履歴情報生成処理のうち、上述の解析対象走行履歴情報取得部21bと走行履歴情報生成部21cとが実行する処理を詳細に説明する。図3は、解析対象走行履歴情報取得部21bと走行履歴情報生成部21cとが実行する走行履歴情報生成処理を示すフローチャートである。なお、制御部20は、走行履歴情報記録部21aによる処理を当該図3に示す処理と並行して実行している。すなわち、制御部20は、走行履歴情報記録部21aの処理により、車両Cから走行履歴情報300bが送信されるたびに当該走行履歴情報300bを受信し、走行履歴情報30bとして記録媒体30に記録する処理を実行している。
【0038】
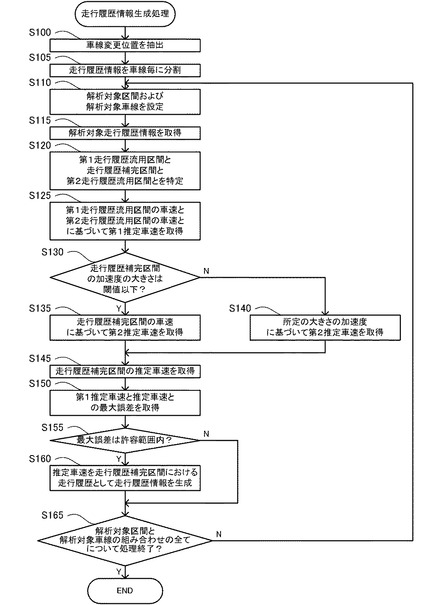
一方、制御部20は、解析対象走行履歴情報取得部21bと走行履歴情報生成部21cとの処理により、図3に示す走行履歴情報生成処理を所定期間毎(例えば、100ms毎)に繰り返し実行する。当該図3に示す走行履歴情報生成処理において、制御部20は、解析対象走行履歴情報取得部21bの処理により、走行履歴情報30bを参照して車線変更位置を抽出する(ステップS100)。すなわち、地図情報300aで定義された道路区間上の車線の位置は予め判明しており、制御部20は、当該車線の位置と走行履歴情報30bに対応づけられた位置とを比較することによって車両が車線の境界線を越えたか否かを判定し、車線の境界線を越えたと判定された場合には当該車線の境界線を越えた位置を車線変更位置とする。例えば、図2に示す例において、制御部20は、車両C1の走行履歴情報30bを参照して位置E1を車線変更位置とし、車両C2の走行履歴情報30bを参照して位置S2を車線変更位置とする。
【0039】
次に、制御部20は、解析対象走行履歴情報取得部21bの処理により、走行履歴情報を車線毎に分割する(ステップS105)。すなわち、制御部20は、道路区間の開始位置と終了位置との間の区間に車線変更位置が存在する場合には、走行履歴情報30bを車線毎の情報に分割する。例えば、図2に示す例において、制御部20は、車両C1の走行履歴情報30bを位置S1から位置E1までの走行履歴情報と位置E1から位置E2までの走行履歴情報とに分割する。また、制御部20は、車両C2の走行履歴情報30bを位置S1から位置S2までの走行履歴情報と位置S2から位置E2までの走行履歴情報とに分割する。
【0040】
次に、制御部20は、解析対象走行履歴情報取得部21bの処理により、解析対象区間および解析対象車線を設定する(ステップS110)。このため、まず、制御部20は、走行履歴情報30bを参照し、道路区間の全部において同一の車線上の位置が対応づけられた走行履歴情報30bを抽出し、道路区間の全部において同一の車線上の位置が対応づけられた走行履歴情報30bが一つも存在しない道路区間および車線の組み合わせを特定する。すなわち、車線上の一部に走行履歴情報30bの位置が対応づけられていない(車線を維持して走行した車両が存在しない)車線を抽出し、このような車線を道路区間と車線との組み合わせとして特定する。
【0041】
さらに、制御部20は、特定された道路区間および車線の組み合わせを一つずつ解析対象としてステップS110〜S155のループ処理を行うことによって、車線を維持して走行した車両が存在しない道路区間および車線についての走行履歴情報30bを生成する。このため、制御部20は、ステップS110が初めて実行される場合には、上述のようにして特定された道路区間と車線との組み合わせから任意の一つを解析対象区間および解析対象車線の組み合わせとして設定する。一方、ループ処理の過程でステップS110の実行が2回目以降となった場合、既に選択された道路区間と車線との組み合わせ以外の組み合わせを、解析対象区間および解析対象車線の組み合わせとして設定する。
【0042】
次に、制御部20は、解析対象走行履歴情報取得部21bの処理により、解析対象走行履歴情報を取得する(ステップS115)。すなわち、制御部20は、ステップS105にて分割された走行履歴情報30bから解析対象車線上の位置が対応づけられた情報を抽出し、解析対象走行履歴情報とする。例えば、図2に示す例においては、上述のように、位置S1から位置E1までの区間における車両C1の走行履歴情報30bと、位置S2から位置E2までの区間における車両C2の走行履歴情報30bとが解析対象走行履歴情報となる。また、位置E1から位置S2までの区間は解析対象走行履歴情報が存在しない無情報区間となる。
【0043】
次に、制御部20は、走行履歴情報生成部21cの処理により、第1走行履歴流用区間と走行履歴補完区間と第2走行履歴流用区間とを特定する(ステップS120)。すなわち、制御部20は、解析対象走行履歴情報が示す車速の基準単位あたりの変化に基づいて、解析対象区間を、補完を行うための走行履歴補完区間と、その後方および前方の第1走行履歴流用区間および第2走行履歴流用区間とに分割する。本実施形態において、基準単位は所定の単位時間であり、単位時間あたりの車速の変化が0である区間を第1走行履歴流用区間および第2走行履歴流用区間とし、単位時間あたりの車速の変化が0ではない区間を走行履歴補完区間とする。すなわち、車両が車速を維持して走行した区間が第1走行履歴流用区間および第2走行履歴流用区間、車両が車速を変化させながら走行した区間が走行履歴補完区間となる。なお、車両が車速を変化させながら走行した区間の前後に無情報区間が接続された状態である場合、車両が車速を変化させながら走行した区間を走行履歴補完区間として設定し、さらに、無情報区間が含まれるように走行履歴補完区間を延長して走行履歴補完区間を定義する。
【0044】
図2の下部においては、縦軸を車速、横軸を位置としたグラフによって解析対象走行履歴情報が示す車速の例を実線で示している。この例において、位置S1から位置E3までの区間の解析対象走行履歴情報が示す車速は一定であるため、位置S1から位置E3までの区間が第1走行履歴流用区間となる。また、位置S3から位置E2までの区間の解析対象走行履歴情報が示す車速は一定であるため、位置S3から位置E2までの区間が第2走行履歴流用区間となる。さらに、位置E3から位置E1までの区間および位置S2から位置S3までの区間における解析対象走行履歴情報が示す車速は変化しているため、位置E3から位置E1までの区間および位置S2から位置S3までの区間が走行履歴補完区間として設定される。さらに、位置E1から位置S2までの区間は無情報区間であるため、走行履歴補完区間が延長され、最終的には位置E3〜位置S3までの区間が走行履歴補完区間となる。
【0045】
次に、制御部20は、走行履歴情報生成部21cの処理により、第1走行履歴流用区間の車速と第2走行履歴流用区間の車速とに基づいて第1推定車速を取得する(ステップS125)。ここで、第1推定車速は、解析対象車線を走行する車両の車速が第1走行履歴流用区間の車速から第2走行履歴流用区間の車速に直接的に変化した場合の車速に相当し、本実施形態においては、第1走行履歴流用区間の終了位置における車速が走行履歴補完区間内に直線的に変化して第2走行履歴流用区間の開始位置において当該第2走行履歴流用区間の開始位置における車速に一致する場合の車速を第1推定車速とする。例えば、図2の下部のグラフに示す例においては、破線の直線で示す車速が第1推定車速である。
【0046】
次に、制御部20は、走行履歴情報生成部21cの処理により、ステップS130〜S140において第2推定車速を取得する。具体的には、制御部20は、走行履歴補完区間の加速度の大きさが閾値以下であるか否かを判定する(ステップS130)。そして、ステップS130にて、走行履歴補完区間の加速度の大きさが閾値以下であると判定された場合、制御部20は、走行履歴情報生成部21cの処理により、走行履歴補完区間の車速に基づいて第2推定車速を取得する(ステップS135)。また、ステップS130にて、走行履歴補完区間の加速度の大きさが閾値以下であると判定されない場合、制御部20は、走行履歴情報生成部21cの処理により、所定の大きさの加速度に基づいて第2推定車速を取得する(ステップS140)。
【0047】
ここで、閾値は通常の運転において発生する可能性が低い加速度の大きさに対応している。従って、走行履歴補完区間の加速度の大きさが閾値よりも大きい場合、車両において行われた減速や加速によって生じた加速度は、偶発的な事象に対応するためや停車車両の後に車両を停止させるためなど再現性の低い動作を運転者が行った結果として生じた加速度である可能性が極めて高い。この場合、走行履歴補完区間の解析対象走行履歴情報が示す車速が他の車両で再現される可能性は極めて低いため、ステップS140においては解析対象走行履歴情報を利用せず予め決められた所定の大きさの加速度に基づいて第2推定車速を取得する。
【0048】
なお、ステップS135においては、走行履歴補完区間の車速に基づいて第2推定車速を取得することができればよく、走行履歴補完区間の解析対象走行履歴情報が示す車速の変化傾向が維持されるとみなして第2推定車速を取得する。例えば、図2の下部のグラフに示す例においては、一点鎖線で示す車速が第2推定車速であり、同グラフにおいては、走行履歴補完区間内の第1走行履歴流用区間側における車速(グラフ内で実線によって示すV1)を右側に延長し、走行履歴補完区間内の第2走行履歴流用区間側における車速(グラフ内で実線によって示すV2)を左側に延長する処理を両者が交わるまで実行した結果を一点鎖線で示している。
【0049】
また、ステップS140においては、走行履歴補完区間において車両に所定の大きさの加速度が作用したとみなして第2推定車速を特定する。例えば、第1走行履歴流用区間よりも前方において減速されていた場合、第1走行履歴流用区間の終了位置において解析対象走行履歴情報が示す車速で走行している車両に所定の大きさの加速度を作用させて減速させた場合の車速を想定する。一方、第2走行履歴流用区間よりも後方において加速されていた場合、車両に所定の大きさの加速度を作用させて加速させて第2走行履歴流用区間の開始位置において解析対象走行履歴情報が示す車速とする場合の車速を想定する。そして、想定された二つの車速の交点を特定し、当該交点の前後において想定された車速が第2推定車速であるとみなす構成を採用可能である。
【0050】
次に、制御部20は、第1推定車速と第2推定車速とに基づいて走行履歴補完区間の推定車速を取得する(ステップS145)。ここでは、第1推定車速から第2推定車速までの車速のいずれかが推定車速であるとみなすことができればよく、本実施形態においては、第1推定車速と第2推定車速との平均値を推定車速とする。
【0051】
すなわち、第1走行履歴流用区間および第2走行履歴流用区間は車速が維持された区間であり、これらの区間では運転者が車線変更などの偶発的な動作を行っていない可能性が高い。従って、第1走行履歴流用区間の終了位置における車速が走行履歴補完区間内に直線的に変化して第2走行履歴流用区間の開始位置において当該第2走行履歴流用区間の開始位置における車速に一致することを想定した第1推定車速は、運転者が車線変更などの偶発的な動作を行っていない場合の車速とみなすことができる。
【0052】
一方、走行履歴補完区間は車速が変化した区間であり、この区間では運転者が車線変更などの偶発的な動作を行っている可能性が高い。従って、解析対象走行履歴情報が示す走行履歴補完区間の車速を延長して推定した第2推定車速は、運転者が車線変更などの偶発的な動作を行った場合の車速である可能性が高い。そこで、第1推定車速と第2推定車速との平均値を推定車速とすることにより、偶発的な動作を行った可能性の高い第2推定車速が、偶発的な動作を行っていない可能性の高い第1推定車速によって補正され、妥当な推定車速を特定することが可能になる。なお、図2の下部のグラフに示す例においては、二点鎖線で示す車速が推定車速である。
【0053】
以上のようにして推定車速を取得すると、当該推定車速を走行履歴補完区間における車速と見なせるか否かを判定するため、制御部20は走行履歴情報生成部21cの処理により、第1推定車速と推定車速との最大誤差を取得する(ステップS150)。すなわち、第1推定車速と推定車速との差分が最大となる位置における差分値を取得する。図2の下部に示すグラフにおいては、位置Pにおける第1推定車速と推定車速との差分が最大誤差となるため、位置Pにおける差分値を取得する。むろん、ここでは、第2推定車速と推定車速との差分に基づいて最大誤差を取得しても良い。
【0054】
次に、制御部20は、走行履歴情報生成部21cの処理により、最大誤差が許容範囲内であるか否かを判定する(ステップS155)。すなわち、最大誤差が予め決められた許容値以下である場合には最大誤差が許容範囲内であると判定する。ステップS155において、最大誤差が許容範囲内であると判定された場合、制御部20は、走行履歴情報生成部21cの処理により、推定車速を走行履歴補完区間における走行履歴として走行履歴情報30bを生成する。すなわち、第1走行履歴流用区間の解析対象走行履歴情報が示す車速と、走行履歴補完区間における推定車速と、第2走行履歴流用区間の解析対象走行履歴情報が示す車速とを結合して解析対象区間における解析対象車線の走行履歴を示す走行履歴情報30bを生成する(ステップS160)。
【0055】
図2の下部のグラフに示す例においては、位置S1から位置E3までの区間の車速がグラフにて実線で示す車速であり、位置E3から位置S3までの区間の車速がグラフにて二点鎖線で示す車速であり、位置S3から位置E2までの区間の車速がグラフにて実線で示す車速であるとみなして解析対象区間における解析対象車線の車速の走行履歴情報30bを生成する。なお、ステップS155において、最大誤差が許容範囲内であると判定されない場合、制御部20は、ステップS160をスキップする。また、ステップS155では推定車速と第1推定車速(あるいは第2推定車速)との誤差を評価できれば良く、推定車速と第1推定車速(あるいは第2推定車速)との差分を位置毎に算出し、累積した値が許容範囲内であるか否かを判定しても良い。なお、ここでは、推定車速と第1推定車速(あるいは第2推定車速)とに差分が生じている区間について差分を累積することができればよく、解析対象区間内で走行履歴補完区間が非連続で2以上の区間に渡っている場合、各区間における差分を累積した値について許容範囲であるか否かを判定する構成とすればよい。
【0056】
以上のようにして、ステップS110にて設定された解析対象区間と解析対象車線の組み合わせについての走行履歴情報30bを生成すると、制御部20は、走行履歴情報生成部21cの処理により、解析対象区間と解析対象車線の組み合わせの全てについて処理を終了したか否かを判定し(ステップS165)、ステップS165において解析対象区間と解析対象車線の組み合わせの全てについて処理を終了したと判定されるまでステップS110以降の処理を繰り返す。以上の処理によれば、車線を維持して走行した車両が存在しない車線についての走行履歴情報30bを生成することが可能になる。
【0057】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、解析対象区間の一部において解析対象車線を走行した車両の走行履歴に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する限りにおいて、他にも種々の実施形態を採用可能である。例えば、上述のフローチャートにおいて、ステップS130,S140,S150,S155を省略することも可能である。
【0058】
また、走行履歴情報は道路上を走行した車両の動作等の履歴を示す情報や動作等の履歴から特定される情報であれば良く、例えば、車速や位置から特定される区間毎の旅行時間を示す情報であっても良い。
【0059】
さらに、上述の実施形態においては解析対象区間内において無情報区間の後方および前方の区間に関する解析対象走行履歴情報が存在する例について説明したが、むろん、解析対象区間内において解析対象走行履歴情報が1個のみ取得された場合(無情報区間が解析対象区間の前端あるいは後端を含む場合)に当該解析対象走行履歴情報から無情報区間の走行履歴情報を生成する構成としても良い。
【0060】
さらに、補完は種々の手法によって行うことが可能である。例えば、無情報区間においても解析対象走行履歴情報が示す車両の動作が連続的に行われると推定し、当該推定された動作に基づいて無情報区間の走行履歴情報を生成する構成を採用可能である。従って、無情報区間や走行履歴補完区間の車速として2個の推定車速を推定した後にこれらを組み合わせる構成の他、1個の推定車速を推定して無情報区間や走行履歴補完区間の推定車速とする構成を採用しても良い。1個の推定車速としては、第1推定車速や第2推定車速等が挙げられる。
【0061】
さらに、第1推定車速と第2推定車速とに基づいて推定車速を取得する際に、第1推定車速と第2推定車速との重みづけ演算を行って推定車速を取得する構成としても良い。また、上述の例においては、無情報区間の前後における車両の動作が滑らかに変化して無情報区間の動作に繋がるように補完を行っていたため、補完される区間が無情報区間の前後に及んでいた(補完される区間が無情報区間を含む走行履歴補完区間であった)が、無情報区間についてのみ補完を行う構成であっても良い。
【0062】
さらに、走行履歴流用区間における車速は基準単位あたりの変化が所定の一定値となる車速であれば良く、基準単位は単位距離であっても良い。むろん、基準単位あたりの車速の変化が所定の誤差範囲内にある場合に車速の変化が所定の一定値であるとみなす構成としても良い。走行履歴補完区間における車速は基準単位あたりの変化を所定の一定値であるとみなすことができない状態であれば良く、基準単位あたりの車速の変化が所定の誤差範囲を超えて変動する場合に車速の変化が所定の一定値ではないとみなす構成としても良い。
【0063】
さらに、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づける構成としても良い。すなわち、走行履歴補完区間における車速は、運転者が車線変更などの偶発的な動作を行った場合の車速である可能性が高いものの、その可能性は走行履歴補完区間の長さに依存し得る。例えば、走行履歴補完区間が長い場合には、走行履歴補完区間が短い場合より長距離に渡って車速の基準単位あたりの変化が所定の一定値ではないことになり、当該車速の基準単位あたりの変化が偶発的な動作の結果である可能性は相対的に低くなる。
【0064】
そこで、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが長くなるほど推定車速が第1推定車速よりも第2推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行った可能性に応じて推定車速を特定することが可能になる。また、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づけ、走行履歴補完区間の長さが短くなるほど推定車速が第1推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行っていない可能性に応じて推定車速を特定することが可能になる。
【0065】
さらに、走行履歴情報を車線毎の情報に分割する際には、車線変更位置を分割の区切りとする構成に限定されず、走行車線から退出した位置や走行車線へ進入した位置を分割の区切りとしてもよい。例えば、走行車線から施設に進入した位置や施設から走行車線に侵入した位置等を分割の区切りとすることが可能である。
【0066】
さらに、車線変更位置を特定するための構成は走行履歴情報に対応づけられた位置を解析することによって車線変更位置を特定する構成に限定されず、例えば、車両Cにおいて画像認識や舵角の検出等を行って車線変更が行われたことを検出し、検出された時点での車両の位置を車線変更位置とし、当該車線変更位置を走行履歴情報300bに含める構成等を採用しても良い。
【符号の説明】
【0067】
10…走行履歴情報生成装置、20…制御部、21…走行履歴情報生成プログラム、21a…走行履歴情報記録部、21b…解析対象走行履歴情報取得部、21c…走行履歴情報生成部、21d…交通情報制御部、22…通信部、30…記録媒体、30b…走行履歴情報、30c…交通情報、100…ナビゲーション装置、200…制御部、210…ナビゲーションプログラム、210a…履歴情報制御部、210b…交通情報受信部、220…通信部、300…記録媒体、300a…地図情報、300b…走行履歴情報、300c…交通情報、410…GPS受信部、420…車速センサ、430…ユーザI/F部
【技術分野】
【0001】
本発明は、車両の走行履歴情報を生成する技術に関する。
【背景技術】
【0002】
従来、道路区間毎の車速や旅行時間などを示す走行履歴情報を車両から収集する技術が知られている。例えば、特許文献1には、道路区間上の走行車線毎の走行履歴情報を収集するため、車両が走行車線を維持して走行したと判定された場合に走行履歴情報を収集する技術が開示されている。また、特許文献2には、複数車線の道路を走行する複数の車両から取得された車両情報を、速度のレベルに応じた複数のクラスに分類し、分類された車両情報がどの車線に対応するか判定する技術が開示されている。そして、特許文献2には、車線変更が行われている場合には車線別の交通情報を生成しない構成や、車線変更が行われた前後で区間を別区間とし、区間毎に平均時速を算出する構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−176243号公報
【特許文献2】特開2010−102575号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された従来の技術においては、車両が走行車線を維持して走行したと判定された場合に走行履歴情報を収集するため、走行車線を維持して走行した車両が存在しない場合には走行履歴情報を収集することができない。また、特許文献2に開示された従来の技術において、車線変更が行われている場合に車線別の交通情報を生成しない構成であると、やはり、走行車線を維持して走行した車両が存在しない場合には走行履歴情報を収集することができない。さらに、特許文献2に開示された従来の技術において、車線変更の前後で区間を別区間としても、車線を維持して走行した車両が存在しない場合には、やはり、情報が存在しない区間が発生してしまう。
本発明は、上記課題にかんがみてなされたもので、走行車線を維持して走行した車両が存在しない場合であっても走行履歴情報を生成することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録し、当該記録媒体を参照して解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す走行履歴情報を解析対象走行履歴情報として取得し、当該解析対象走行履歴情報に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する。すなわち、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から解析対象区間の全部において車両が前記解析対象車線を走行した場合の走行履歴を推定する。この構成によれば、解析対象車線を維持して走行した車両が存在しない場合であっても、解析対象区間の一部において解析対象車線を走行した車両が存在すれば当該解析対象車線についての走行履歴情報を生成することができる。
【0006】
ここで、走行履歴情報記録手段は、車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録することができればよく、例えば、複数の車両から送信される走行履歴情報を通信によって取得し、記録媒体に記録しておき、当該走行履歴情報を解析の基になる情報として利用可能な状態としておけばよい。走行履歴情報は道路上を走行した車両の動作等の履歴を示す情報や動作等の履歴から特定される情報であれば良く、例えば、車両の車速や位置の履歴を示す情報や、車速や位置から特定される区間毎の旅行時間を示す情報等が走行履歴情報となり得る。
【0007】
解析対象走行履歴情報取得手段は、解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す走行履歴情報を解析対象走行履歴情報として取得することができればよい。すなわち、道路上に予め設定された道路区間の中の任意の区間を解析対象区間とし、当該解析対象区間上に1個以上存在する車線の中の任意の車線を解析対象車線とする。そして、当該解析対象区間の全部(解析対象区間の開始位置から終了位置までの全区間)において解析対象車線を走行した車両の走行履歴情報は記録媒体に蓄積されていないが、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報が記録媒体に蓄積されている場合に、当該走行履歴情報を解析対象走行履歴情報として取得すればよい。
【0008】
走行履歴情報生成手段は、解析対象走行履歴情報に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成することができればよい。すなわち、道路上における車両は車速や位置が徐々に変化するなど連続的な動作を行うため、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から、走行履歴情報が存在しない解析対象車線上の位置における走行履歴を推定することができる。そこで、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴を推定すれば、解析対象車線を維持して走行した車両が存在しない場合であっても、解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成することができる。
【0009】
さらに、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報から解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する構成の例として補完を行う構成を採用しても良い。例えば、解析対象車線内の位置に解析対象走行履歴情報が対応づけられていない無情報区間の走行履歴を解析対象走行履歴情報に基づいて補完することによって解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴を生成する構成を採用可能である。すなわち、解析対象走行履歴情報は位置毎の走行履歴を示しているため、当該位置を参照すれば解析対象車線内の各位置に解析対象走行履歴情報が対応づけられているか否かを判定することができる。
【0010】
そして、解析対象車線内の位置に解析対象走行履歴情報が対応づけられてない場合には、その区間は解析対象走行履歴情報によって走行履歴が示されていない区間となるため当該区間を無情報区間とする。当該無情報区間の走行履歴を示す解析対象走行履歴情報は存在しないが、無情報区間の周囲(車線上での進行方向前方と後方との一方または双方)には解析対象走行履歴情報が存在する。そこで、無情報区間の走行履歴を解析対象走行履歴情報に基づいて補完すれば、解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成することが可能である。
【0011】
ここで、補完は種々の手法によって行うことが可能である。例えば、無情報区間においても解析対象走行履歴情報が示す車両の動作が連続的に行われると推定し、当該推定された動作に基づいて無情報区間の走行履歴情報を生成する構成を採用可能である。なお、無情報区間にて行われる動作として推定される動作は1個の動作でも良いし、2個以上の動作であっても良い。2個以上の動作が推定される場合には、2個以上の動作の組み合わせ(例えば、平均値や重みづけ加算)に基づいて無情報区間の走行履歴を生成すればよい。また、ここでは、少なくとも無情報区間の走行履歴を補完によって生成することができればよく、補完される区間が無情報区間の前後に及んでも良い。例えば、解析対象走行履歴情報が対応づけられた位置を含めて動作が滑らかに変化して無情報区間の動作に繋がるように補完を行って走行履歴情報を生成する構成等を採用可能である。
【0012】
さらに、走行履歴情報に車速が含まれる場合に走行履歴情報を生成する構成の例として、車速の変化に着目して解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する構成としても良い。例えば、解析対象走行履歴情報が示す車速の基準単位あたりの変化が所定の一定値である走行履歴流用区間と車速の基準単位あたりの変化が所定の一定値ではない走行履歴補完区間とを特定し、解析対象走行履歴情報が示す走行履歴流用区間における車速と解析対象走行履歴情報が示す走行履歴補完区間における車速とに基づいて走行履歴補完区間における推定車速を特定し、当該推定車速を走行履歴補完区間における走行履歴として走行履歴情報を生成する構成を採用可能である。
【0013】
すなわち、車速の基準単位あたりの変化が一定である場合、運転者が車線変更などの偶発的な動作を行っていない可能性が高い。そこで、車速の基準単位あたりの変化が所定の一定値である場合には運転者が車線変更などの偶発的な動作を行っていない可能性が高いとみなし、車速の基準単位あたりの変化が所定の一定値である区間(走行履歴流用区間)の解析対象走行履歴情報はそのまま流用できるとみなす。また、車速の基準単位あたりの変化が所定の一定値ではない場合には運転者が車線変更などの偶発的な動作を行った可能性が高いとみなし、車速の基準単位あたりの変化が所定の一定値ではない区間(走行履歴補完区間)においては走行履歴情報を補完して推定車速を特定することとする。そして、走行履歴補完区間に関しては、走行履歴流用区間における車速と走行履歴補完区間における車速との双方に基づいて推定車速を特定する。この結果、偶発的な動作を行った可能性の高い走行履歴補完区間の車速が、偶発的な動作を行っていない可能性の高い走行履歴流用区間の車速によって補正され、妥当な推定車速を特定することが可能になる。
【0014】
なお、走行履歴補完区間は、車速の基準単位あたりの変化が所定の一定値ではない区間の前後の区間を含んでいても良い。例えば、走行履歴補完区間の前後に上述の無情報区間が接続された状態である場合、当該無情報区間を含めた区間を走行履歴補完区間とし、走行履歴補完区間内の無情報区間ではない区間における解析対象走行履歴情報が示す車速から当該無情報区間の車速を特定し、推定車速の特定に利用する構成としても良い。また、走行履歴流用区間における車速は基準単位(単位時間あるいは単位距離)あたりの変化が所定の一定値となる車速であれば良く、基準単位あたりの車速の変化が0の一定車速であっても良いし、基準単位あたりの車速の変化が0ではない一定値(例えば、一定加速度で実現される車速の変化)であってもよい。むろん、基準単位あたりの車速の変化が所定の一定値から所定の誤差範囲内の値である場合に車速の変化が一定とみなす構成としても良い。
【0015】
走行履歴補完区間における車速は基準単位(単位時間あるいは単位距離)あたりの変化が所定の一定値ではない車速であれば良く、走行履歴流用区間の車速に基づいて特定されればよい。例えば、走行履歴流用区間における車速の基準単位あたりの変化が0である場合、走行履歴補完区間における車速は基準単位あたりの変化が0ではない車速であり、基準単位あたりの車速の変化が0ではない一定値である場合や車速の変化が定数とならない場合を含む。また、走行履歴流用区間における車速の基準単位あたりの変化が0ではない一定値である場合、走行履歴補完区間における車速は基準単位あたりの変化が当該一定値ではない車速となり、例えば、車速の変化が定数とならない場合の車速が該当する。
【0016】
さらに、解析対象車線内に、走行履歴補完区間と、当該走行履歴補完区間の後に存在する第1走行履歴流用区間と、走行履歴補完区間の前に存在する第2走行履歴流用区間と、が含まれる場合に、走行履歴補完区間において解析対象走行履歴情報が示す第1走行履歴流用区間の車速から解析対象走行履歴情報が示す第2走行履歴流用区間の車速に推移する第1推定車速と、解析対象走行履歴情報が示す走行履歴補完区間の車速にて走行した場合の第2推定車速とを特定し、第1推定車速から第2推定車速までの車速のいずれかが推定車速であるとみなす構成としても良い。
【0017】
すなわち、第1走行履歴流用区間の車速から第2走行履歴流用区間の車速に直接的に変化した場合の車速に相当する第1推定車速と、走行履歴補完区間の車速から推定される第2推定車速との双方に基づいて推定車速を特定する。この構成により、偶発的な動作を行った可能性の高い場合の第2推定車速が、偶発的な動作を行っていない可能性の高い場合の第1推定車速によって補正され、妥当な推定車速を特定することが可能になる。なお、推定車速は第1推定車速から第2推定車速までの車速のいずれかであれば良く、例えば、第1推定車速と第2推定車速との中間の車速を推定車速とすれば、第1推定車速と第2推定車速との平均値を推定車速とすることになる。
【0018】
さらに、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づける構成としても良い。すなわち、走行履歴補完区間における車速は、運転者が車線変更などの偶発的な動作を行った場合の車速である可能性が高いものの、その可能性は走行履歴補完区間の長さに依存し得る。例えば、走行履歴補完区間が長い場合には、走行履歴補完区間が短い場合より長距離に渡って車速の基準単位あたりの変化が所定の一定値ではないことになり、当該車速の基準単位あたりの変化が偶発的な動作の結果である可能性は相対的に低くなる。
【0019】
そこで、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが長くなるほど推定車速が第2推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行った可能性に応じて推定車速を特定することが可能になる。また、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づけ、走行履歴補完区間の長さが短くなるほど推定車速が第1推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行っていない可能性に応じて推定車速を特定することが可能になる。
【0020】
さらに、本発明のように、解析対象区間の一部において解析対象車線を走行した車両の走行履歴に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置、走行履歴の管理システムや方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0021】
【図1】走行履歴情報生成装置のブロック図である。
【図2】補完が行われる区間と車速とを説明する図である。
【図3】走行履歴情報生成処理を示すフローチャートである。
【発明を実施するための形態】
【0022】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)走行履歴情報生成装置の構成:
(2)走行履歴情報生成処理:
(3)他の実施形態:
【0023】
(1)走行履歴情報生成装置の構成:
図1は、車両Cに備えられたナビゲーション装置100と走行履歴情報の管理センターに設置された走行履歴情報生成装置10とを含むシステムの構成を示すブロック図である。ナビゲーション装置100は道路を走行する複数の車両Cに搭載されており、当該ナビゲーション装置100はCPU,RAM,ROM等を備える制御部200と記録媒体300とを備えており、当該記録媒体300やROMに記憶されたプログラムを制御部200で実行することができる。本実施形態において制御部200は、このプログラムの一つとしてナビゲーションプログラム210を実行可能である。
【0024】
さらに、車両Cは、通信部220とGPS受信部410と車速センサ420とユーザI/F部430とを備えている。通信部220は、無線通信を行うための回路にて構成され、制御部200は通信部220を制御して走行履歴情報生成装置10と通信を行うことができる。GPS受信部410は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両Cの現在位置を算出するための情報を出力する。制御部200は、この信号を取得して車両Cの現在位置を取得する。車速センサ420は、車両Cが備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両Cの速度を取得する。車速センサ420は、GPS受信部410の出力信号から特定される車両Cの現在位置を補正するなどのために利用される。また、車両Cの現在位置は、当該車両Cの走行軌跡および地図情報300aに基づいて適宜補正される。
【0025】
地図情報300aは予め決められた区画(メッシュ)毎に定義されて記録媒体300に記録されている。当該地図情報300aには車両Cが走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間データ、ノード同士の連結を示すリンクデータ、走行予定経路の目的地となり得る施設を示す施設データ等が含まれている。制御部200は、地図情報300aが示すノードデータやリンクデータに基づいてリンクに相当する道路区間を特定し、各道路区間上での車両Cの位置を特定することができる。なお、車両Cの位置を示す情報を取得するための構成は図1に示す構成に限定されず、車速センサ420以外のセンサも併用する構成としてもよい。例えば、車両Cの現在位置をジャイロセンサ等の出力信号に基づいて補正する構成等を採用可能である。
【0026】
ユーザI/F部430は、ユーザが指示を入力し、またはユーザに各種の情報を提供するためのインタフェース部であり、図示しない表示部やボタン、スピーカー等を備えている。制御部200は、ナビゲーションプログラム210の処理により、ユーザI/F部430を介して走行経路や走行経路に関する交通情報等を案内する。
【0027】
ナビゲーションプログラム210は履歴情報制御部210aおよび交通情報受信部210bを備えており、制御部200は、履歴情報制御部210aの処理により車両Cの走行中に走行履歴情報300bを取得し走行履歴情報生成装置10に対して送信する。すなわち、制御部200は、履歴情報制御部210aの処理により、車速センサ420等によって各道路区間上の各位置における車両Cの車速を示す走行履歴情報300bを生成し、記録媒体300に記録する。さらに、制御部200は、履歴情報制御部210aの処理により、通信部220を介して所定のタイミングで走行履歴情報300bを走行履歴情報生成装置10に対して送信する。
【0028】
また、制御部200は、交通情報受信部210bの処理により、通信部220を介して所定のタイミングで交通情報の送信要求を走行履歴情報生成装置10に対して送信する。なお、交通情報の送信要求には車両Cの現在位置を示す情報が含まれ、走行履歴情報生成装置10は当該送信要求に応じて当該現在位置の車両Cが必要とする交通情報を送信対象として設定して、設定された交通情報30cを送信する。交通情報30cが送信されると、制御部200は交通情報受信部210bの処理により通信部220を介して当該交通情報30cを受信し、交通情報300cとして記録媒体300に記録する。なお、本実施形態において、交通情報300cはノードデータとリンクデータとによって特定される道路区間毎の渋滞を示す渋滞情報(例えば、渋滞度等)であり、車両Cから送信された走行履歴情報300bに基づいて作成された情報である。
【0029】
走行履歴情報生成装置10は、CPU,RAM,ROM等を備える制御部20と記録媒体30とを備えており、制御部20は当該記録媒体30やROMに記録されたプログラムを実行することができる。さらに、走行履歴情報生成装置10は通信部22を備えている。通信部22は、無線通信を行うための回路にて構成され、制御部20は通信部22を制御して車両Cと通信を行うことができる。
【0030】
本実施形態において制御部20は、記録媒体30に記録された走行履歴情報生成プログラム21を実行可能であり、制御部20は、当該走行履歴情報生成プログラム21の処理により、走行履歴情報300bを受信し、また、交通情報30cを送信する。
【0031】
走行履歴情報生成プログラム21は、走行履歴情報記録部21aと解析対象走行履歴情報取得部21bと走行履歴情報生成部21cと交通情報制御部21dとを備えている。走行履歴情報記録部21aは、車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、走行履歴情報記録部21aの処理により、車両Cと同様の構成を備える任意の車両(車両Cを含む)から所定のタイミングで送信される走行履歴情報300bを、通信部22を介して受信し、走行履歴情報30bとして記録媒体30に記録する。この結果、各道路区間上の各位置における任意の車両の車速を示す走行履歴情報が走行履歴情報30bとして記録媒体30に記録される。
【0032】
解析対象走行履歴情報取得部21bは、解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す走行履歴情報を解析対象走行履歴情報として取得する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、地図情報300aと同様の道路区間のそれぞれを解析対象区間とし、各道路区間に存在する車線のそれぞれを一つずつ解析対象車線と仮定した場合に、解析対象区間の全部において解析対象車線を走行した車両の走行履歴情報30bは記録媒体30に蓄積されていないが、解析対象区間の一部において解析対象車線を走行した車両の走行履歴情報30bが記録媒体30に蓄積されている場合に、当該走行履歴情報30bを解析対象走行履歴情報として取得する。
【0033】
図2の上部においては、ある道路区間Zを模式的に示している。道路区間Zにおいては車線が2個存在するため、当該道路区間Zが解析対象区間となる場合、2個の車線のそれぞれが解析対象車線となり得る。本明細書においては図2を参照する際には、図2の進行方向に向かって左側の車線が解析対象車線である場合の例について説明する。図2に示す例において、車両C1が細い実線の矢印のように走行し、車両C2が太い実線の矢印のように走行した場合、位置S1から位置E1までの区間における車両C1の走行履歴情報30bが解析対象走行履歴情報となり、位置S2から位置E2までの区間における車両C2の走行履歴情報30bが解析対象走行履歴情報となる。なお、解析対象車線を走行した車両が車両C1および車両C2のみである場合、位置E1から位置S2までの区間は解析対象走行履歴情報が存在しない無情報区間となる。
【0034】
走行履歴情報生成部21cは、解析対象走行履歴情報に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する機能を制御部20に実現させるモジュールである。本実施形態において、制御部20は、解析対象走行履歴情報が示す車速の基準単位あたりの変化が所定の一定値ではない走行履歴補完区間(無情報区間が存在する場合には無情報区間を含む)とし、走行履歴補完区間における車速を解析対象走行履歴情報に基づいて補完することによって、解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報30bを生成する。なお、当該補完の詳細は後述する。
【0035】
交通情報制御部21dは、走行履歴情報30bから交通情報30cを生成するとともに、送信要求を行った車両Cに当該交通情報30cを送信する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、各道路区間の各車線についての車速を示す走行履歴情報30bと各道路区間の長さとに基づいて各道路区間の平均旅行時間を算出する。そして、当該平均旅行時間と予め決められた閾値とを比較することによって各道路区間における平均旅行時間が長いほど渋滞の程度が大きくなるように道路区間毎の渋滞度を特定して交通情報30cとする。むろん、ここで渋滞度の特定は日時毎や時間帯毎に行っても良い。さらに、制御部20が、通信部22を介して車両Cからの交通情報の送信要求を受け付けると、当該送信要求によって要求された範囲の交通情報30cを抽出し、通信部22を介して当該交通情報30cを車両Cに対して送信する。
【0036】
以上の構成によれば、解析対象車線を維持して走行した車両が存在しない場合であっても、解析対象区間の一部において解析対象車線を走行した車両が存在すれば当該解析対象車線についての走行履歴情報30bを生成することが可能になる。従って、車両の走行頻度が少ない道路区間であっても交通情報30cが特定可能である可能性が高くなり、交通情報30cが存在しない道路区間の発生を抑制しながら交通情報30cの送信システムを運用することが可能である。
【0037】
(2)走行履歴情報生成処理:
次に走行履歴情報生成処理のうち、上述の解析対象走行履歴情報取得部21bと走行履歴情報生成部21cとが実行する処理を詳細に説明する。図3は、解析対象走行履歴情報取得部21bと走行履歴情報生成部21cとが実行する走行履歴情報生成処理を示すフローチャートである。なお、制御部20は、走行履歴情報記録部21aによる処理を当該図3に示す処理と並行して実行している。すなわち、制御部20は、走行履歴情報記録部21aの処理により、車両Cから走行履歴情報300bが送信されるたびに当該走行履歴情報300bを受信し、走行履歴情報30bとして記録媒体30に記録する処理を実行している。
【0038】
一方、制御部20は、解析対象走行履歴情報取得部21bと走行履歴情報生成部21cとの処理により、図3に示す走行履歴情報生成処理を所定期間毎(例えば、100ms毎)に繰り返し実行する。当該図3に示す走行履歴情報生成処理において、制御部20は、解析対象走行履歴情報取得部21bの処理により、走行履歴情報30bを参照して車線変更位置を抽出する(ステップS100)。すなわち、地図情報300aで定義された道路区間上の車線の位置は予め判明しており、制御部20は、当該車線の位置と走行履歴情報30bに対応づけられた位置とを比較することによって車両が車線の境界線を越えたか否かを判定し、車線の境界線を越えたと判定された場合には当該車線の境界線を越えた位置を車線変更位置とする。例えば、図2に示す例において、制御部20は、車両C1の走行履歴情報30bを参照して位置E1を車線変更位置とし、車両C2の走行履歴情報30bを参照して位置S2を車線変更位置とする。
【0039】
次に、制御部20は、解析対象走行履歴情報取得部21bの処理により、走行履歴情報を車線毎に分割する(ステップS105)。すなわち、制御部20は、道路区間の開始位置と終了位置との間の区間に車線変更位置が存在する場合には、走行履歴情報30bを車線毎の情報に分割する。例えば、図2に示す例において、制御部20は、車両C1の走行履歴情報30bを位置S1から位置E1までの走行履歴情報と位置E1から位置E2までの走行履歴情報とに分割する。また、制御部20は、車両C2の走行履歴情報30bを位置S1から位置S2までの走行履歴情報と位置S2から位置E2までの走行履歴情報とに分割する。
【0040】
次に、制御部20は、解析対象走行履歴情報取得部21bの処理により、解析対象区間および解析対象車線を設定する(ステップS110)。このため、まず、制御部20は、走行履歴情報30bを参照し、道路区間の全部において同一の車線上の位置が対応づけられた走行履歴情報30bを抽出し、道路区間の全部において同一の車線上の位置が対応づけられた走行履歴情報30bが一つも存在しない道路区間および車線の組み合わせを特定する。すなわち、車線上の一部に走行履歴情報30bの位置が対応づけられていない(車線を維持して走行した車両が存在しない)車線を抽出し、このような車線を道路区間と車線との組み合わせとして特定する。
【0041】
さらに、制御部20は、特定された道路区間および車線の組み合わせを一つずつ解析対象としてステップS110〜S155のループ処理を行うことによって、車線を維持して走行した車両が存在しない道路区間および車線についての走行履歴情報30bを生成する。このため、制御部20は、ステップS110が初めて実行される場合には、上述のようにして特定された道路区間と車線との組み合わせから任意の一つを解析対象区間および解析対象車線の組み合わせとして設定する。一方、ループ処理の過程でステップS110の実行が2回目以降となった場合、既に選択された道路区間と車線との組み合わせ以外の組み合わせを、解析対象区間および解析対象車線の組み合わせとして設定する。
【0042】
次に、制御部20は、解析対象走行履歴情報取得部21bの処理により、解析対象走行履歴情報を取得する(ステップS115)。すなわち、制御部20は、ステップS105にて分割された走行履歴情報30bから解析対象車線上の位置が対応づけられた情報を抽出し、解析対象走行履歴情報とする。例えば、図2に示す例においては、上述のように、位置S1から位置E1までの区間における車両C1の走行履歴情報30bと、位置S2から位置E2までの区間における車両C2の走行履歴情報30bとが解析対象走行履歴情報となる。また、位置E1から位置S2までの区間は解析対象走行履歴情報が存在しない無情報区間となる。
【0043】
次に、制御部20は、走行履歴情報生成部21cの処理により、第1走行履歴流用区間と走行履歴補完区間と第2走行履歴流用区間とを特定する(ステップS120)。すなわち、制御部20は、解析対象走行履歴情報が示す車速の基準単位あたりの変化に基づいて、解析対象区間を、補完を行うための走行履歴補完区間と、その後方および前方の第1走行履歴流用区間および第2走行履歴流用区間とに分割する。本実施形態において、基準単位は所定の単位時間であり、単位時間あたりの車速の変化が0である区間を第1走行履歴流用区間および第2走行履歴流用区間とし、単位時間あたりの車速の変化が0ではない区間を走行履歴補完区間とする。すなわち、車両が車速を維持して走行した区間が第1走行履歴流用区間および第2走行履歴流用区間、車両が車速を変化させながら走行した区間が走行履歴補完区間となる。なお、車両が車速を変化させながら走行した区間の前後に無情報区間が接続された状態である場合、車両が車速を変化させながら走行した区間を走行履歴補完区間として設定し、さらに、無情報区間が含まれるように走行履歴補完区間を延長して走行履歴補完区間を定義する。
【0044】
図2の下部においては、縦軸を車速、横軸を位置としたグラフによって解析対象走行履歴情報が示す車速の例を実線で示している。この例において、位置S1から位置E3までの区間の解析対象走行履歴情報が示す車速は一定であるため、位置S1から位置E3までの区間が第1走行履歴流用区間となる。また、位置S3から位置E2までの区間の解析対象走行履歴情報が示す車速は一定であるため、位置S3から位置E2までの区間が第2走行履歴流用区間となる。さらに、位置E3から位置E1までの区間および位置S2から位置S3までの区間における解析対象走行履歴情報が示す車速は変化しているため、位置E3から位置E1までの区間および位置S2から位置S3までの区間が走行履歴補完区間として設定される。さらに、位置E1から位置S2までの区間は無情報区間であるため、走行履歴補完区間が延長され、最終的には位置E3〜位置S3までの区間が走行履歴補完区間となる。
【0045】
次に、制御部20は、走行履歴情報生成部21cの処理により、第1走行履歴流用区間の車速と第2走行履歴流用区間の車速とに基づいて第1推定車速を取得する(ステップS125)。ここで、第1推定車速は、解析対象車線を走行する車両の車速が第1走行履歴流用区間の車速から第2走行履歴流用区間の車速に直接的に変化した場合の車速に相当し、本実施形態においては、第1走行履歴流用区間の終了位置における車速が走行履歴補完区間内に直線的に変化して第2走行履歴流用区間の開始位置において当該第2走行履歴流用区間の開始位置における車速に一致する場合の車速を第1推定車速とする。例えば、図2の下部のグラフに示す例においては、破線の直線で示す車速が第1推定車速である。
【0046】
次に、制御部20は、走行履歴情報生成部21cの処理により、ステップS130〜S140において第2推定車速を取得する。具体的には、制御部20は、走行履歴補完区間の加速度の大きさが閾値以下であるか否かを判定する(ステップS130)。そして、ステップS130にて、走行履歴補完区間の加速度の大きさが閾値以下であると判定された場合、制御部20は、走行履歴情報生成部21cの処理により、走行履歴補完区間の車速に基づいて第2推定車速を取得する(ステップS135)。また、ステップS130にて、走行履歴補完区間の加速度の大きさが閾値以下であると判定されない場合、制御部20は、走行履歴情報生成部21cの処理により、所定の大きさの加速度に基づいて第2推定車速を取得する(ステップS140)。
【0047】
ここで、閾値は通常の運転において発生する可能性が低い加速度の大きさに対応している。従って、走行履歴補完区間の加速度の大きさが閾値よりも大きい場合、車両において行われた減速や加速によって生じた加速度は、偶発的な事象に対応するためや停車車両の後に車両を停止させるためなど再現性の低い動作を運転者が行った結果として生じた加速度である可能性が極めて高い。この場合、走行履歴補完区間の解析対象走行履歴情報が示す車速が他の車両で再現される可能性は極めて低いため、ステップS140においては解析対象走行履歴情報を利用せず予め決められた所定の大きさの加速度に基づいて第2推定車速を取得する。
【0048】
なお、ステップS135においては、走行履歴補完区間の車速に基づいて第2推定車速を取得することができればよく、走行履歴補完区間の解析対象走行履歴情報が示す車速の変化傾向が維持されるとみなして第2推定車速を取得する。例えば、図2の下部のグラフに示す例においては、一点鎖線で示す車速が第2推定車速であり、同グラフにおいては、走行履歴補完区間内の第1走行履歴流用区間側における車速(グラフ内で実線によって示すV1)を右側に延長し、走行履歴補完区間内の第2走行履歴流用区間側における車速(グラフ内で実線によって示すV2)を左側に延長する処理を両者が交わるまで実行した結果を一点鎖線で示している。
【0049】
また、ステップS140においては、走行履歴補完区間において車両に所定の大きさの加速度が作用したとみなして第2推定車速を特定する。例えば、第1走行履歴流用区間よりも前方において減速されていた場合、第1走行履歴流用区間の終了位置において解析対象走行履歴情報が示す車速で走行している車両に所定の大きさの加速度を作用させて減速させた場合の車速を想定する。一方、第2走行履歴流用区間よりも後方において加速されていた場合、車両に所定の大きさの加速度を作用させて加速させて第2走行履歴流用区間の開始位置において解析対象走行履歴情報が示す車速とする場合の車速を想定する。そして、想定された二つの車速の交点を特定し、当該交点の前後において想定された車速が第2推定車速であるとみなす構成を採用可能である。
【0050】
次に、制御部20は、第1推定車速と第2推定車速とに基づいて走行履歴補完区間の推定車速を取得する(ステップS145)。ここでは、第1推定車速から第2推定車速までの車速のいずれかが推定車速であるとみなすことができればよく、本実施形態においては、第1推定車速と第2推定車速との平均値を推定車速とする。
【0051】
すなわち、第1走行履歴流用区間および第2走行履歴流用区間は車速が維持された区間であり、これらの区間では運転者が車線変更などの偶発的な動作を行っていない可能性が高い。従って、第1走行履歴流用区間の終了位置における車速が走行履歴補完区間内に直線的に変化して第2走行履歴流用区間の開始位置において当該第2走行履歴流用区間の開始位置における車速に一致することを想定した第1推定車速は、運転者が車線変更などの偶発的な動作を行っていない場合の車速とみなすことができる。
【0052】
一方、走行履歴補完区間は車速が変化した区間であり、この区間では運転者が車線変更などの偶発的な動作を行っている可能性が高い。従って、解析対象走行履歴情報が示す走行履歴補完区間の車速を延長して推定した第2推定車速は、運転者が車線変更などの偶発的な動作を行った場合の車速である可能性が高い。そこで、第1推定車速と第2推定車速との平均値を推定車速とすることにより、偶発的な動作を行った可能性の高い第2推定車速が、偶発的な動作を行っていない可能性の高い第1推定車速によって補正され、妥当な推定車速を特定することが可能になる。なお、図2の下部のグラフに示す例においては、二点鎖線で示す車速が推定車速である。
【0053】
以上のようにして推定車速を取得すると、当該推定車速を走行履歴補完区間における車速と見なせるか否かを判定するため、制御部20は走行履歴情報生成部21cの処理により、第1推定車速と推定車速との最大誤差を取得する(ステップS150)。すなわち、第1推定車速と推定車速との差分が最大となる位置における差分値を取得する。図2の下部に示すグラフにおいては、位置Pにおける第1推定車速と推定車速との差分が最大誤差となるため、位置Pにおける差分値を取得する。むろん、ここでは、第2推定車速と推定車速との差分に基づいて最大誤差を取得しても良い。
【0054】
次に、制御部20は、走行履歴情報生成部21cの処理により、最大誤差が許容範囲内であるか否かを判定する(ステップS155)。すなわち、最大誤差が予め決められた許容値以下である場合には最大誤差が許容範囲内であると判定する。ステップS155において、最大誤差が許容範囲内であると判定された場合、制御部20は、走行履歴情報生成部21cの処理により、推定車速を走行履歴補完区間における走行履歴として走行履歴情報30bを生成する。すなわち、第1走行履歴流用区間の解析対象走行履歴情報が示す車速と、走行履歴補完区間における推定車速と、第2走行履歴流用区間の解析対象走行履歴情報が示す車速とを結合して解析対象区間における解析対象車線の走行履歴を示す走行履歴情報30bを生成する(ステップS160)。
【0055】
図2の下部のグラフに示す例においては、位置S1から位置E3までの区間の車速がグラフにて実線で示す車速であり、位置E3から位置S3までの区間の車速がグラフにて二点鎖線で示す車速であり、位置S3から位置E2までの区間の車速がグラフにて実線で示す車速であるとみなして解析対象区間における解析対象車線の車速の走行履歴情報30bを生成する。なお、ステップS155において、最大誤差が許容範囲内であると判定されない場合、制御部20は、ステップS160をスキップする。また、ステップS155では推定車速と第1推定車速(あるいは第2推定車速)との誤差を評価できれば良く、推定車速と第1推定車速(あるいは第2推定車速)との差分を位置毎に算出し、累積した値が許容範囲内であるか否かを判定しても良い。なお、ここでは、推定車速と第1推定車速(あるいは第2推定車速)とに差分が生じている区間について差分を累積することができればよく、解析対象区間内で走行履歴補完区間が非連続で2以上の区間に渡っている場合、各区間における差分を累積した値について許容範囲であるか否かを判定する構成とすればよい。
【0056】
以上のようにして、ステップS110にて設定された解析対象区間と解析対象車線の組み合わせについての走行履歴情報30bを生成すると、制御部20は、走行履歴情報生成部21cの処理により、解析対象区間と解析対象車線の組み合わせの全てについて処理を終了したか否かを判定し(ステップS165)、ステップS165において解析対象区間と解析対象車線の組み合わせの全てについて処理を終了したと判定されるまでステップS110以降の処理を繰り返す。以上の処理によれば、車線を維持して走行した車両が存在しない車線についての走行履歴情報30bを生成することが可能になる。
【0057】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、解析対象区間の一部において解析対象車線を走行した車両の走行履歴に基づいて解析対象区間の全部において車両が解析対象車線を走行した場合の走行履歴情報を生成する限りにおいて、他にも種々の実施形態を採用可能である。例えば、上述のフローチャートにおいて、ステップS130,S140,S150,S155を省略することも可能である。
【0058】
また、走行履歴情報は道路上を走行した車両の動作等の履歴を示す情報や動作等の履歴から特定される情報であれば良く、例えば、車速や位置から特定される区間毎の旅行時間を示す情報であっても良い。
【0059】
さらに、上述の実施形態においては解析対象区間内において無情報区間の後方および前方の区間に関する解析対象走行履歴情報が存在する例について説明したが、むろん、解析対象区間内において解析対象走行履歴情報が1個のみ取得された場合(無情報区間が解析対象区間の前端あるいは後端を含む場合)に当該解析対象走行履歴情報から無情報区間の走行履歴情報を生成する構成としても良い。
【0060】
さらに、補完は種々の手法によって行うことが可能である。例えば、無情報区間においても解析対象走行履歴情報が示す車両の動作が連続的に行われると推定し、当該推定された動作に基づいて無情報区間の走行履歴情報を生成する構成を採用可能である。従って、無情報区間や走行履歴補完区間の車速として2個の推定車速を推定した後にこれらを組み合わせる構成の他、1個の推定車速を推定して無情報区間や走行履歴補完区間の推定車速とする構成を採用しても良い。1個の推定車速としては、第1推定車速や第2推定車速等が挙げられる。
【0061】
さらに、第1推定車速と第2推定車速とに基づいて推定車速を取得する際に、第1推定車速と第2推定車速との重みづけ演算を行って推定車速を取得する構成としても良い。また、上述の例においては、無情報区間の前後における車両の動作が滑らかに変化して無情報区間の動作に繋がるように補完を行っていたため、補完される区間が無情報区間の前後に及んでいた(補完される区間が無情報区間を含む走行履歴補完区間であった)が、無情報区間についてのみ補完を行う構成であっても良い。
【0062】
さらに、走行履歴流用区間における車速は基準単位あたりの変化が所定の一定値となる車速であれば良く、基準単位は単位距離であっても良い。むろん、基準単位あたりの車速の変化が所定の誤差範囲内にある場合に車速の変化が所定の一定値であるとみなす構成としても良い。走行履歴補完区間における車速は基準単位あたりの変化を所定の一定値であるとみなすことができない状態であれば良く、基準単位あたりの車速の変化が所定の誤差範囲を超えて変動する場合に車速の変化が所定の一定値ではないとみなす構成としても良い。
【0063】
さらに、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づける構成としても良い。すなわち、走行履歴補完区間における車速は、運転者が車線変更などの偶発的な動作を行った場合の車速である可能性が高いものの、その可能性は走行履歴補完区間の長さに依存し得る。例えば、走行履歴補完区間が長い場合には、走行履歴補完区間が短い場合より長距離に渡って車速の基準単位あたりの変化が所定の一定値ではないことになり、当該車速の基準単位あたりの変化が偶発的な動作の結果である可能性は相対的に低くなる。
【0064】
そこで、走行履歴補完区間の長さが所定の上限値に近づくほど推定車速を第1推定車速と第2推定車速との平均値に近づけ、走行履歴補完区間の長さが長くなるほど推定車速が第1推定車速よりも第2推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行った可能性に応じて推定車速を特定することが可能になる。また、走行履歴補完区間の長さが所定の下限値に近づくほど推定車速を第1推定車速に近づけ、走行履歴補完区間の長さが短くなるほど推定車速が第1推定車速に近づくように構成することで、運転者が車線変更などの偶発的な動作を行っていない可能性に応じて推定車速を特定することが可能になる。
【0065】
さらに、走行履歴情報を車線毎の情報に分割する際には、車線変更位置を分割の区切りとする構成に限定されず、走行車線から退出した位置や走行車線へ進入した位置を分割の区切りとしてもよい。例えば、走行車線から施設に進入した位置や施設から走行車線に侵入した位置等を分割の区切りとすることが可能である。
【0066】
さらに、車線変更位置を特定するための構成は走行履歴情報に対応づけられた位置を解析することによって車線変更位置を特定する構成に限定されず、例えば、車両Cにおいて画像認識や舵角の検出等を行って車線変更が行われたことを検出し、検出された時点での車両の位置を車線変更位置とし、当該車線変更位置を走行履歴情報300bに含める構成等を採用しても良い。
【符号の説明】
【0067】
10…走行履歴情報生成装置、20…制御部、21…走行履歴情報生成プログラム、21a…走行履歴情報記録部、21b…解析対象走行履歴情報取得部、21c…走行履歴情報生成部、21d…交通情報制御部、22…通信部、30…記録媒体、30b…走行履歴情報、30c…交通情報、100…ナビゲーション装置、200…制御部、210…ナビゲーションプログラム、210a…履歴情報制御部、210b…交通情報受信部、220…通信部、300…記録媒体、300a…地図情報、300b…走行履歴情報、300c…交通情報、410…GPS受信部、420…車速センサ、430…ユーザI/F部
【特許請求の範囲】
【請求項1】
車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する走行履歴情報記録手段と、
解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得する解析対象走行履歴情報取得手段と、
前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する走行履歴情報生成手段と、
を備える走行履歴情報生成装置。
【請求項2】
前記走行履歴情報生成手段は、前記解析対象車線内の位置に前記解析対象走行履歴情報が対応づけられていない無情報区間の走行履歴を前記解析対象走行履歴情報に基づいて補完することによって前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する、
請求項1に記載の走行履歴情報生成装置。
【請求項3】
前記走行履歴情報生成手段は、前記解析対象走行履歴情報が示す車速の基準単位あたりの変化が所定の一定値である走行履歴流用区間と前記解析対象走行履歴情報が示す車速の基準単位あたりの変化が前記所定の一定値ではない走行履歴補完区間とを特定し、前記解析対象走行履歴情報が示す前記走行履歴流用区間における車速と前記解析対象走行履歴情報が示す前記走行履歴補完区間における車速とに基づいて前記走行履歴補完区間における推定車速を特定し、当該推定車速を前記走行履歴補完区間における走行履歴として前記走行履歴情報を生成する、
請求項1または請求項2のいずれかに記載の走行履歴情報生成装置。
【請求項4】
前記走行履歴情報生成手段は、前記解析対象車線内に、前記走行履歴補完区間と、当該走行履歴補完区間の後方に存在する第1走行履歴流用区間と、前記走行履歴補完区間の前方に存在する第2走行履歴流用区間と、が含まれる場合に、前記走行履歴補完区間において前記解析対象走行履歴情報が示す前記第1走行履歴流用区間の車速から前記解析対象走行履歴情報が示す前記第2走行履歴流用区間の車速に推移する第1推定車速と、前記走行履歴補完区間において前記解析対象走行履歴情報が示す前記走行履歴補完区間の車速にて走行した場合の第2推定車速とを特定し、前記第1推定車速から前記第2推定車速までの車速のいずれかが前記推定車速であるとみなす、
請求項3に記載の走行履歴情報生成装置。
【請求項5】
前記走行履歴情報生成手段は、前記走行履歴補完区間の長さが所定の上限値に近づくほど前記推定車速を前記第1推定車速と前記第2推定車速との平均値に近づけ、前記走行履歴補完区間の長さが所定の下限値に近づくほど前記推定車速を前記第1推定車速に近づける、
請求項4に記載の走行履歴情報生成装置。
【請求項6】
車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する走行履歴情報記録工程と、
解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得する解析対象走行履歴情報取得工程と、
前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する走行履歴情報生成工程と、
を含む走行履歴情報生成方法。
【請求項7】
車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する走行履歴情報記録機能と、
解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得する解析対象走行履歴情報取得機能と、
前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する走行履歴情報生成機能と、
をコンピュータに実現させる走行履歴情報生成プログラム。
【請求項1】
車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する走行履歴情報記録手段と、
解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得する解析対象走行履歴情報取得手段と、
前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する走行履歴情報生成手段と、
を備える走行履歴情報生成装置。
【請求項2】
前記走行履歴情報生成手段は、前記解析対象車線内の位置に前記解析対象走行履歴情報が対応づけられていない無情報区間の走行履歴を前記解析対象走行履歴情報に基づいて補完することによって前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する、
請求項1に記載の走行履歴情報生成装置。
【請求項3】
前記走行履歴情報生成手段は、前記解析対象走行履歴情報が示す車速の基準単位あたりの変化が所定の一定値である走行履歴流用区間と前記解析対象走行履歴情報が示す車速の基準単位あたりの変化が前記所定の一定値ではない走行履歴補完区間とを特定し、前記解析対象走行履歴情報が示す前記走行履歴流用区間における車速と前記解析対象走行履歴情報が示す前記走行履歴補完区間における車速とに基づいて前記走行履歴補完区間における推定車速を特定し、当該推定車速を前記走行履歴補完区間における走行履歴として前記走行履歴情報を生成する、
請求項1または請求項2のいずれかに記載の走行履歴情報生成装置。
【請求項4】
前記走行履歴情報生成手段は、前記解析対象車線内に、前記走行履歴補完区間と、当該走行履歴補完区間の後方に存在する第1走行履歴流用区間と、前記走行履歴補完区間の前方に存在する第2走行履歴流用区間と、が含まれる場合に、前記走行履歴補完区間において前記解析対象走行履歴情報が示す前記第1走行履歴流用区間の車速から前記解析対象走行履歴情報が示す前記第2走行履歴流用区間の車速に推移する第1推定車速と、前記走行履歴補完区間において前記解析対象走行履歴情報が示す前記走行履歴補完区間の車速にて走行した場合の第2推定車速とを特定し、前記第1推定車速から前記第2推定車速までの車速のいずれかが前記推定車速であるとみなす、
請求項3に記載の走行履歴情報生成装置。
【請求項5】
前記走行履歴情報生成手段は、前記走行履歴補完区間の長さが所定の上限値に近づくほど前記推定車速を前記第1推定車速と前記第2推定車速との平均値に近づけ、前記走行履歴補完区間の長さが所定の下限値に近づくほど前記推定車速を前記第1推定車速に近づける、
請求項4に記載の走行履歴情報生成装置。
【請求項6】
車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する走行履歴情報記録工程と、
解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得する解析対象走行履歴情報取得工程と、
前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する走行履歴情報生成工程と、
を含む走行履歴情報生成方法。
【請求項7】
車両から当該車両が走行した位置が対応づけられた走行履歴情報を取得して所定の記録媒体に記録する走行履歴情報記録機能と、
解析対象区間の一部において解析対象車線を走行した車両の走行履歴を示す前記走行履歴情報を解析対象走行履歴情報として取得する解析対象走行履歴情報取得機能と、
前記解析対象走行履歴情報に基づいて前記解析対象区間の全部において車両が前記解析対象車線を走行した場合の前記走行履歴情報を生成する走行履歴情報生成機能と、
をコンピュータに実現させる走行履歴情報生成プログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−108824(P2012−108824A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−258588(P2010−258588)
【出願日】平成22年11月19日(2010.11.19)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月19日(2010.11.19)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]