
走行情報演算装置および走行情報演算方法
【課題】GPSの精度が低くても信号機のサイクルを推測できるようにする。
【解決手段】走行情報演算装置100は、自動車の測定された位置と測定時刻とを含む走行情報を当該自動車に搭載された車載器からネットワーク20を介して取得する走行情報取得部102と、走行情報取得部102によって取得された走行情報をもとに、自動車が所定の位置範囲内にとどまっている期間を特定する停止検出部104と、停止検出部104によって特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、停止検出部104によって特定された期間を当該信号機に対応する期間として取得する信号前停止期間取得部106と、所定の信号機について信号前停止期間取得部106によって取得される複数の期間を組み合わせることによって、その信号機が赤信号となっている期間を演算するサイクル演算部142と、を備える。
【解決手段】走行情報演算装置100は、自動車の測定された位置と測定時刻とを含む走行情報を当該自動車に搭載された車載器からネットワーク20を介して取得する走行情報取得部102と、走行情報取得部102によって取得された走行情報をもとに、自動車が所定の位置範囲内にとどまっている期間を特定する停止検出部104と、停止検出部104によって特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、停止検出部104によって特定された期間を当該信号機に対応する期間として取得する信号前停止期間取得部106と、所定の信号機について信号前停止期間取得部106によって取得される複数の期間を組み合わせることによって、その信号機が赤信号となっている期間を演算するサイクル演算部142と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行情報演算装置および走行情報演算情報に関し、特に車両から走行情報を収集して処理する走行情報演算技術に関する。
【背景技術】
【0002】
道路を走行する自動車が交通信号機(以下、単に信号機と称す)で停止することなく連続的に走行できれば、その自動車の燃費は格段に良くなるであろう。自動車の停止と発進には比較的多くの燃料が必要とされるからである。
【0003】
そこでまず考えられるのは、信号機のサイクルを直接信号機から取得して利用することである(例えば、特許文献1参照)。しかしながら、この手法は現実的ではない。現時点では、個々の信号機からその信号機のサイクルを車両に向けて発信するような仕組みが構築されていないからである。なお、現在研究目的等でそのような仕組みを開発する動きはあるが、全国津々浦々の信号機の全てにそのような仕組みが取り付けられる可能性は低く、それが実現されるとしても相当に時間がかかるであろう。
【0004】
考えられる別の解は走行中の自動車から情報を収集して信号機のサイクルを推定することである。例えば特許文献2には、信号機の手前で停止している車列の各車両が青信号で発進したり赤信号で停止したりする流れを交通流の粗密波の流れに見立てた上で、信号機の切り替わり時刻を推定する手法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−296798号公報
【特許文献2】特開2009−116508号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献2に示される手法では、交差点付近での車両の移動距離を比較的精度良く測定する必要があり、したがって車両を比較的正確に位置決めする必要がある。車両の位置を特定するためのGPS(Global Positioning System)などの測位システムの精度は年々向上してきてはいるが、特許文献2に示される手法で要求されるような高い精度を提供できるものはまだ少ない。したがって、特許文献2に示される手法では、推定に必要な質と量のデータを集めることができないかまたは集めるのに時間がかかる虞がある。
【0007】
本発明はこうした課題に鑑みてなされたものであり、その目的は、測位システムの精度がそれほど高くなくても車両から得られる情報から信号機のサイクルを推測できる技術の提供にある。
【課題を解決するための手段】
【0008】
本発明のある態様は走行情報演算装置に関する。この走行情報演算装置は、車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得する走行情報取得部と、走行情報取得部によって取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定する停止検出部と、停止検出部によって特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、停止検出部によって特定された期間を当該信号機に対応する期間として取得する停止期間取得部と、を備える。
【0009】
この態様によると、車両の測定された位置の精度が比較的低い場合でも、その位置が所定の位置範囲内にとどまっていればそれをその車両の停止として検出することができる。
【0010】
なお、以上の構成要素の任意の組み合わせや、本発明の構成要素や表現を装置、方法、システム、コンピュータプログラム、コンピュータプログラムを格納した記録媒体などの間で相互に置換したものもまた、本発明の態様として有効である。
【発明の効果】
【0011】
本発明によれば、測位システムの精度がそれほど高くなくても車両から得られる情報から信号機のサイクルを推測できる。
【図面の簡単な説明】
【0012】
【図1】実施の形態に係る走行情報演算装置を備えるナビゲーションシステムの構成を示す模式図である。
【図2】走行情報を説明するための説明図である。
【図3】本実施の形態に係る走行情報演算装置において行われる信号機のサイクルの推測を説明するための説明図である。
【図4】実施の形態に係る走行情報演算装置の機能および構成を示すブロック図である。
【図5】図4の走行情報保持部の一例を示すデータ構造図である。
【図6】図4の並び替え情報保持部の一例を示すデータ構造図である。
【図7】図4の並び替え情報処理部における一連の処理の一例を示すフローチャートである。
【図8】図4の停止期間保持部の一例を示すデータ構造図である。
【図9】図4の信号前停止期間保持部の一例を示すデータ構造図である。
【図10】図4の実測サイクル保持部に保持される実測赤信号期間を説明するための説明図である。
【図11】図4の予測サイクル保持部の一例を示すデータ構造図である。
【図12】NS速度の演算を説明するための説明図である。
【図13】図4のNS速度保持部の一例を示すデータ構造図である。
【図14】図4のルート生成部におけるNSルートの生成処理を説明するための説明図である。
【図15】図4の走行情報演算装置における一連の処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。
【0014】
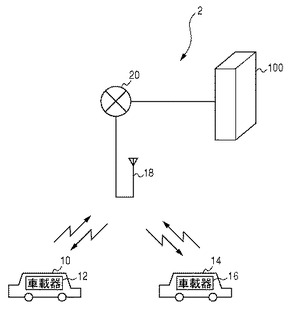
図1は、実施の形態に係る走行情報演算装置100を備えるナビゲーションシステム2の構成を示す模式図である。ナビゲーションシステム2は、自動車10、14などの車両に搭載された車載器12、16と、基地局18と、インターネットなどのネットワーク20と、本実施の形態に係る走行情報演算装置100と、を備える。
【0015】
車載器12、16は、GPSなどの測位システムを使用して、それが搭載されている自動車10、14の測定された位置(以下、測定位置と称す)とその測定が行われた時刻である測定時刻とを取得する。この測定位置は任意の座標系で表されてもよく、例えば緯度および経度で表される。車載器12、16は、それが搭載されている自動車10、14を特定する車両IDと測定位置と測定時刻とを含む走行情報を生成し、生成された走行情報を基地局18、ネットワーク20を介して走行情報演算装置100に送信する。この観点から、車載器12、16は走行情報を送信する通信装置であると言える。また、測定位置および測定時刻の取得および走行情報の送信は、所定の時間間隔、例えば4秒間隔で行われる。走行情報演算装置100はそのようにして送信された走行情報を受信し、保持する。
【0016】
車載器12、16はまた、出発地の位置と目的地の位置とを含みルート案内を要求するルート要求を、基地局18、ネットワーク20を介して走行情報演算装置100に送信する。車載器12、16は、ルート要求に応じて走行情報演算装置100で生成されるルート情報を、ネットワーク20、基地局18を介して受信する。車載器12、16は、受信されたルート情報に基づくナビゲーション画面を不図示のディスプレイに表示させる。
【0017】
基地局18は道路の傍の建物等に設けられ、車載器12、16と無線により通信を行う。基地局18は車載器12、16から受信した情報をネットワーク20に送信し、またネットワーク20から車載器12、16宛に送られてきた情報を車載器12、16に送信する。ネットワーク20は基地局18および走行情報演算装置100と接続される。
【0018】
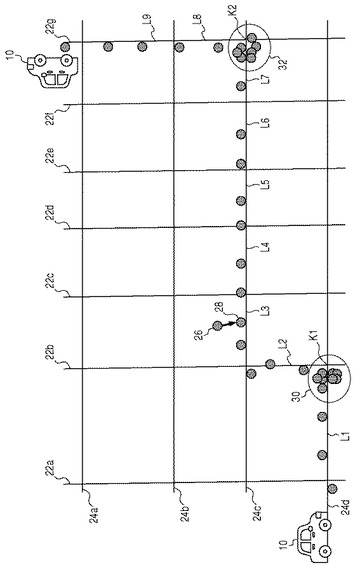
図2は、走行情報を説明するための説明図である。図2の紙面上下方向は例えば南北方向であり、この方向に沿って7本の2車線道路22a、22b、22c、22d、22e、22f、22gが設けられている。図2の紙面左右方向は例えば東西方向であり、この方向に沿って4本の2車線道路24a、24b、24c、24dが設けられている。南北方向の2車線道路と東西方向の2車線道路との交差点のそれぞれには、南北方向の2車線道路について2つ、東西方向の2車線道路について2つの計4つの信号機が設けられている。
【0019】
ここで自動車10が交差点間リンクL1、L2、L3、L4、L5、L6、L7、L8、L9をこの順に通過し、自動車10の車載器12がその間走行情報を送信したとする。図2中の灰色の丸は車載器12から送信されてきた走行情報に含まれる測定位置を表す。
【0020】
一般にGPSによる測位の精度は道路の幅と比べて粗く、したがって、自動車10は実際は道路を走っているのであるが測定位置は道路から少し外れた箇所になることも多い。特に建物が周りにある場合、測定位置は道路から大きくずれることもある(例えば図2中の丸26)。走行情報演算装置100は、既知の道路地図の情報と自動車の前後の軌跡などから正確な位置を推測する公知のマップマッチングの技術を使用して、受信した走行情報を処理してもよい。マップマッチングの結果、例えば丸26で示される測定位置は丸28で示される位置に修正される。
【0021】
交差点間リンクL1と交差点間リンクL2とが交わる交差点K1および交差点間リンクL7と交差点間リンクL8とが交わる交差点K2で自動車10が赤信号で停止したとする。すると、図2にも示されるように交差点K1および交差点K2の周囲で測定位置が所定の大きさの位置範囲30、32内で固まって検出される。なお、GPSの粗い精度のため、自動車10が実際には停止していても測定位置はその実際の停止位置の周りに分散する。
【0022】
本実施の形態では想定されるGPSの精度を元に位置範囲の大きさを設定する。走行情報演算装置100は、所定数以上の測定位置がその大きさの位置範囲内に続いて検出された場合に自動車がその位置範囲内で停止していると判定する。そして、自動車が停止する理由は赤信号で停止する他にも例えば駐車場に停めることなどもあるので、走行情報演算装置100は、自動車が停止していると判定された位置範囲と既知の信号機の位置との関係に基づきそれらが対応するか否かを判定する。走行情報演算装置100は、対応すると判定された場合、その位置範囲内に測定位置が検出され続ける期間を取得する。走行情報演算装置100は、そのようにして取得された期間中、自動車がその信号機の赤信号で停止していると判定する。これにより、信号機が赤信号となっている期間を、GPSの粗い精度を考慮しても十分に正確に推測できる。
【0023】
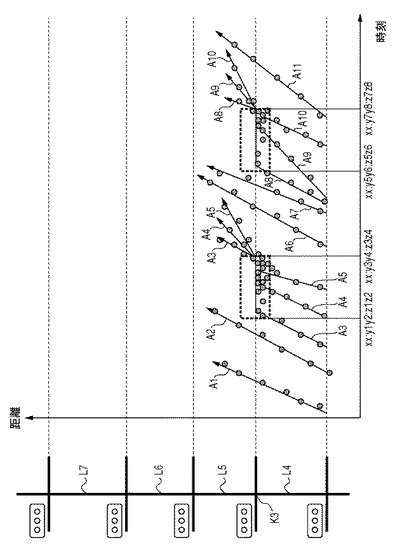
図3は、本実施の形態に係る走行情報演算装置100において行われる信号機のサイクルの推測を説明するための説明図である。図3に示されるグラフの横軸は時刻、縦軸は距離を示す。この距離は図2の東西方向の2車線道路24cに沿った距離である。図3では特に図2に示される交差点間リンクL4、L5、L6、L7が示される。図3中の灰色の丸は車載器から送信されてきた走行情報に含まれる測定位置および測定時刻の組に対応する。交差点間リンクL4と交差点間リンクL5とが交わる交差点K3に着目すると、矢印A1、A2、A6、A7、A11で示される自動車は交差点K3を青信号で通過したと考えられる。また、矢印A3、A4、A5、A8、A9、A10で示される自動車については、交差点K3に設けられた信号機の位置の周辺で測定位置が続けて検出されているので、交差点K3で赤信号で停止したと考えられる。
【0024】
このように多くの自動車の軌跡をマッピングすることによって、信号機のサイクルを推測することができる。例えば図3の例では、交差点K3について測定位置が密集している時刻「xx:y1y2:z1z2」から時刻「xx:y3y4:z3z4」までの期間と、時刻「xx:y5y6:z5z6」から時刻「xx:y7y8:z7z8」までの期間は、東西方向に設けられた信号機が赤信号であったと推測できる。この推測結果から、信号機が次の日も同じサイクルで赤信号と青信号とを繰り返すと仮定すると、次の日の時刻「xx:y1y2:z1z2」から時刻「xx:y3y4:z3z4」までの期間と、時刻「xx:y5y6:z5z6」から時刻「xx:y7y8:z7z8」までの期間もまたこの信号機は赤信号となっていると推測される。
【0025】
このように、走行情報演算装置100は走行情報を収集してマッピングし、信号機が赤信号であった期間を推測する。そして走行情報演算装置100は、その推測された期間の情報を基に今後信号機が赤信号となるであろう期間を推測する。これにより、信号機のサイクルを直接得ることが困難な状況にあっても信号機のサイクルを統計的に推測することができる。
【0026】
なお、信号機のサイクルの制御の仕方は、例えばその信号機が設けられている道路の道路種別や曜日や平日/土日祝日の別や1日の中でも昼夜の別などにより異なりうる。しかしながら以下では説明を分かりやすくするため、推測対象の信号機は毎日同じサイクルで赤信号と青信号とを繰り返す状況を仮定する。また、信号機が黄信号となっている期間は一般に信号機が青信号や赤信号となっている期間よりもかなり短いので、以下では考慮に入れないものとする。しかしながら、信号機のサイクルの制御の仕方が道路種別や曜日などで異なる場合は、例えば信号機のサイクルの制御の仕方が同じと考えられる信号機単位で、または信号機のサイクルの制御の仕方が同じと考えられる期間の単位で、以下と同様の処理を行えばよいことは、本明細書に触れた当業者には明らかである。また、信号機の黄信号、赤信号点滅状態などを考慮する場合でも以下と同様の説明が成立することは、本明細書に触れた当業者には明らかである。
【0027】
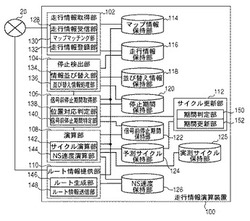
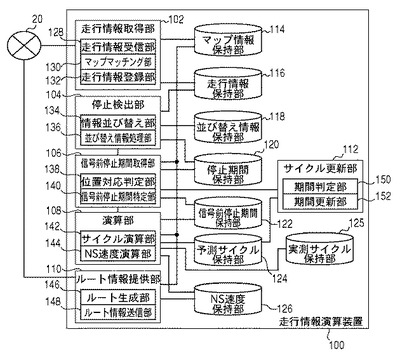
図4は、実施の形態に係る走行情報演算装置100の機能および構成を示すブロック図である。ここに示す各ブロックは、ハードウエア的には、コンピュータのCPU(central processing unit)をはじめとする素子や機械装置で実現でき、ソフトウエア的にはコンピュータプログラム等によって実現されるが、ここでは、それらの連携によって実現される機能ブロックを描いている。したがって、これらの機能ブロックはハードウエア、ソフトウエアの組合せによっていろいろなかたちで実現できることは、本明細書に触れた当業者には理解されるところである。
【0028】
走行情報演算装置100は、走行情報取得部102と、停止検出部104と、信号前停止期間取得部106と、演算部108と、ルート情報提供部110と、サイクル更新部112と、マップ情報保持部114と、走行情報保持部116と、並び替え情報保持部118と、停止期間保持部120と、信号前停止期間保持部122と、予測サイクル保持部124と、実測サイクル保持部125と、NS速度保持部126と、を備える。
【0029】
マップ情報保持部114は所与の道路地図情報を保持し、例えば交差点間リンクの位置や長さおよび信号機を特定する信号機IDおよびその信号機の位置を保持する。マップ情報保持部114は、例えば財団法人日本デジタル道路地図協会が提供するデジタル道路地図データベースから得られる情報を保持してもよい。
【0030】
走行情報取得部102は、自動車に搭載された車載器から走行情報をネットワーク20を介して取得し、走行情報保持部116に登録する。走行情報取得部102は、走行情報受信部128と、マップマッチング部130と、走行情報登録部132と、を含む。
【0031】
走行情報受信部128は、ネットワーク20から走行情報を受信する。
マップマッチング部130は、走行情報受信部128によって受信された走行情報から測定位置を抽出する。マップマッチング部130は、抽出された測定位置に対してマップ情報保持部114を参照してマップマッチング処理を行う。
走行情報登録部132は、マップマッチング部130によってマップマッチング処理された測定位置を含む走行情報を走行情報保持部116に登録する。
【0032】
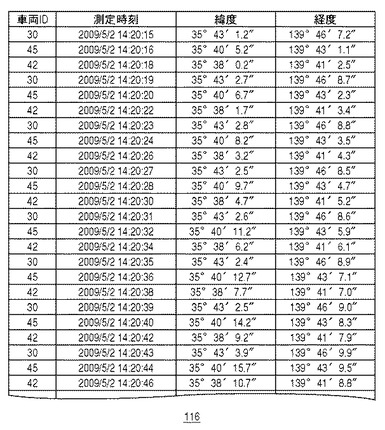
図5は、走行情報保持部116の一例を示すデータ構造図である。走行情報保持部116は、走行情報に含まれる車両IDと、測定時刻と、測定位置としての緯度および経度と、を対応付けて保持する。
【0033】
図4に戻り、停止検出部104は、走行情報保持部116に保持されている走行情報をもとに自動車が所定の大きさの位置範囲内にとどまっているか否かを判定し、とどまっていると判定された場合はその位置範囲を代表する基準位置を特定し、その位置範囲にとどまっている期間を停止期間として特定する。停止検出部104は、情報並び替え部134と、並び替え情報処理部136と、を含む。
【0034】
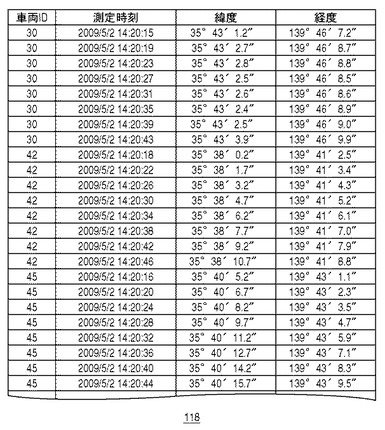
情報並び替え部134は、走行情報保持部116から走行情報を車両IDごとに抽出し、抽出された走行情報を測定時刻についてソーティングし、並び替え情報保持部118に登録する。
図6は、並び替え情報保持部118の一例を示すデータ構造図である。
【0035】
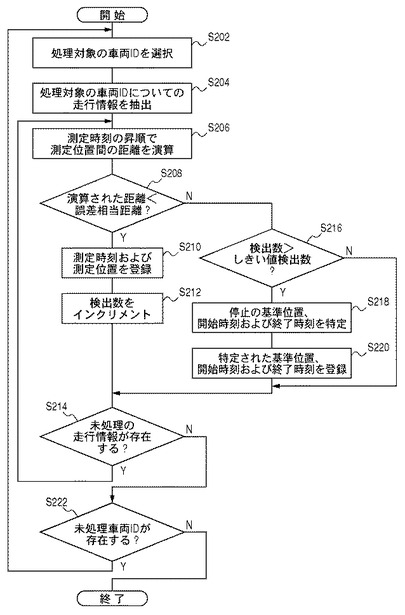
図7は、並び替え情報処理部136における一連の処理の一例を示すフローチャートである。並び替え情報処理部136は、まだ処理対象とされていない車両IDのなかから、処理対象の車両IDを選択する(S202)。並び替え情報処理部136は、並び替え情報保持部118から処理対象の車両IDについての走行情報を抽出する(S204)。並び替え情報処理部136は、抽出された走行情報について測定時刻の昇順で測定位置間の距離を演算する(S206)。並び替え情報処理部136は例えば、ある測定時刻(以下、第1測定時刻と称す)における測定位置と次の測定時刻(以下、第2測定時刻と称す)における測定位置との距離を演算する。
【0036】
並び替え情報処理部136は演算された距離と所定の誤差相当距離とを比較する(S208)。並び替え情報処理部136は、演算された距離のほうが小さい場合(S208のY)、第1測定時刻とその時刻における測定位置と第2測定時刻とその時刻における測定位置とを不図示の一時保持部に登録する(S210)。また並び替え情報処理部136は、自動車の停止を検出するためのパラメータである検出数をインクリメントする(S212)。例えば、並び替え情報処理部136は、最初は検出数を0から2とし、それ以降は検出数を+1する。並び替え情報処理部136は、抽出された走行情報のなかにまだ距離演算の対象となっていない走行情報が存在するか否かを判定する(S214)。存在する場合(S214のY)、処理はS206に戻る。
【0037】
並び替え情報処理部136は、ステップS208における比較の結果、演算された距離のほうが大きいか誤差相当距離と等しい場合(S208のN)、その時点での検出数と所定のしきい値検出数とを比較する(S216)。並び替え情報処理部136は、検出数がしきい値検出数よりも大きい場合(S216のY)、一時保持部に保持される測定位置の平均位置を演算し、演算結果を停止の基準位置として特定する(S218)。また、並び替え情報処理部136は、一時保持部に登録されている測定時刻のうちの最初の時刻を停止期間の開始時刻として、最後の時刻を停止期間の終了時刻として特定する(S218)。
【0038】
並び替え情報処理部136は、車両IDと、特定された停止の基準位置と、特定された停止期間の開始時刻と、特定された停止期間の終了時刻と、を対応付けて停止期間保持部120に登録する(S220)。その後、並び替え情報処理部136は検出数を0に戻し、処理をステップS214に進める。並び替え情報処理部136は、ステップS216における比較の結果、検出数がしきい値検出数よりも小さいか等しい場合(S216のN)、検出数を0に戻し、処理をステップS214に進める。
【0039】
並び替え情報処理部136は、ステップS214において未処理の走行情報が存在しないと判定された場合(S214のN)、並び替え情報保持部118に登録されている車両IDのなかでまだ並び替え情報処理部136によって処理対象とされていない車両IDがあるか否かを判定する(S222)。並び替え情報処理部136は、未処理の車両IDが存在する場合(S222のY)、処理をステップS202に進める。並び替え情報処理部136は、未処理の車両IDが存在しない場合(S222のN)、処理を終了する。
【0040】
このようにして並び替え情報処理部136は、誤差相当距離に基づく大きさを有する位置範囲内にしきい値検出数×走行情報取得間隔よりも長く自動車がとどまっていれば、その位置範囲の基準位置とそこにとどまっている停止期間とを停止期間保持部120に登録する。
【0041】
なお、誤差相当距離は、測定位置について想定される誤差の大きさに応じた値に設定されてもよく、例えばGPSの誤差を基に定められてもよい。
また、信号機が赤信号となっている期間の一般的な長さに基づいて検出数の上限値を設けてもよい。この場合、例えば自動車が信号機の一回のサイクルでその信号機を通過できなかった場合を検出し、そのような場合のデータを破棄することができる。
また、自動車が位置範囲内にとどまった後右折したかまたは左折した場合、そのデータを破棄してもよい。右折や左折の場合は信号機以外にも対向車線からの自動車の有無や横断歩道を渡る歩行者の有無などによって停止期間が変わりうるからである。
【0042】
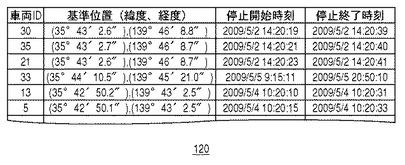
図8は、停止期間保持部120の一例を示すデータ構造図である。停止期間保持部120は、車両IDと、停止の基準位置と、停止期間の開始時刻と、停止期間の終了時刻と、を対応付けて保持する。
【0043】
図4に戻り、信号前停止期間取得部106は、停止検出部104によって特定された停止の基準位置と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、その基準位置に対応する停止期間を当該信号機に対応する信号前停止期間として取得する。信号前停止期間は例えば自動車が信号機の赤信号によってその信号機の前で停止した期間である。しかしながら、例えば乗降のためにその信号機の傍で一時的に停車する場合なども考えられるので、信号前停止期間は自動車が赤信号で停止した期間の候補であると言える。信号前停止期間取得部106は、位置対応判定部138と、信号前停止期間特定部140と、を含む。
【0044】
位置対応判定部138は、停止期間保持部120から停止の基準位置を取得する。位置対応判定部138は、取得された基準位置に最も近い信号機の位置をマップ情報保持部114から取得する。位置対応判定部138は取得された基準位置と取得された信号機の位置との距離を演算する。位置対応判定部138は、演算された距離が所定の対応距離よりも小さい場合、取得された基準位置とそれに最も近い信号機とが対応すると判定する。この対応距離は例えば誤差相当距離と同じに設定されてもよい。
【0045】
信号前停止期間特定部140は、位置対応判定部138において基準位置と信号機とが対応すると判定された場合、停止期間保持部120から、その基準位置に対応する停止期間を当該信号機に対応する信号前停止期間として取得する。信号前停止期間特定部140は、信号機を特定する信号機IDと、その信号機について取得された信号前停止期間の開始時刻と、その信号機について取得された信号前停止期間の終了時刻と、を対応付けて信号前停止期間保持部122に登録する。
図9は、信号前停止期間保持部122の一例を示すデータ構造図である。
【0046】
図4に戻り、演算部108は、サイクル演算部142と、NS速度演算部144と、を含む。
サイクル演算部142は、所定の信号機について信号前停止期間取得部106によって取得される複数の信号前停止期間を組み合わせることによって、その信号機が赤信号となっている期間を演算する。
【0047】
例えばサイクル演算部142は、信号前停止期間保持部122から所定の信号機についての信号前停止期間を抽出する。サイクル演算部142は、抽出された信号前停止期間のうちのN(Nは2以上の整数)個以上の信号前停止期間が重なり合う場合、その重なり合っている期間を所定の信号機が赤信号となっている実測赤信号期間として決定する。このNの値は測定位置の誤差等を考慮して決定されてもよい。
【0048】
例えば図9に示される信号前停止期間保持部122についてN=3とすると、信号機ID「TL12」について3つの信号前停止期間「2009/5/2 14:20:19〜2009/5/2 14:20:39」、「2009/5/2 14:20:21〜2009/5/2 14:20:40」、「2009/5/2 14:20:23〜2009/5/2 14:20:41」が重なり合っているので、サイクル演算部142はそれらが重なり合う部分の期間「2009/5/2 14:20:23〜2009/5/2 14:20:39」を信号機ID「TL12」によって特定される信号機の実測赤信号期間として決定する。
【0049】
サイクル演算部142は、決定された実測赤信号期間と所定の信号機の信号機IDとを対応付けて実測サイクル保持部125に登録する。これにより、収集された走行情報から各信号機が赤信号となっている期間すなわちサイクルを測定し蓄積することができる。
【0050】
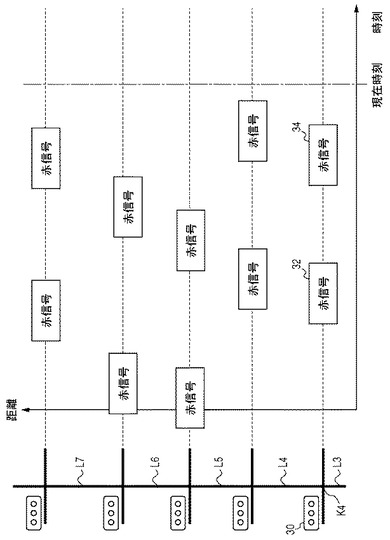
図10は、実測サイクル保持部125に保持される実測赤信号期間を説明するための説明図である。図10に示されるグラフの横軸は時刻、縦軸は距離を示す。この距離は図2の東西方向の2車線道路24cに沿った距離である。図10では特に図2に示される交差点間リンクL3、L4、L5、L6、L7が示される。図10で一点鎖線で示される現在時刻は、走行情報保持部116に保持される走行情報を処理している現在の時刻を示す。以下、東から西に向かう向きを上りとする。実測サイクル保持部125は、交差点間リンクL3と交差点間リンクL4とが交わる交差点K4に設けられた4つの信号機のうち東西方向の上りの信号機30について、赤信号となっている実測赤信号期間32、34を保持する。実測サイクル保持部125は他の信号機についても同様に実測赤信号期間を保持する。
【0051】
サイクル演算部142は、実測サイクル保持部125に保持される情報から、将来、所定の信号機が赤信号となるであろう期間を予測する。特に本実施の形態では上述の通り、予測対象の信号機では毎日同じサイクルが繰り返されるという前提のもとで予測される。すなわち、ある信号機について過去14時10分15秒から36秒まで赤信号であったなら、本日および次の日もその信号機は14時10分15秒から36秒まで赤信号となると予測する。サイクル演算部142は実測サイクル保持部125から、各信号機について実測赤信号期間を数日または数ヶ月分取得し、それを一日を単位として統計処理する。
【0052】
サイクル演算部142は、M(Mは2以上の整数)日分以上の実測赤信号期間が重なり合う1日の中の時間帯を、信号機が赤信号となるであろう時間帯である予測赤信号時間帯として決定してもよい。例えば、ある信号機について実測赤信号期間が1日前は14時30分25秒〜14時30分45秒、2日前は14時30分24秒〜14時30分46秒、3日前は14時30分25秒〜14時30分44秒となっている場合、サイクル演算部142はそれらが重なり合う部分の時間帯である14時30分25秒〜14時30分44秒を予測赤信号時間帯として決定する。
サイクル演算部142は、決定された予測赤信号時間帯を信号機ごとに予測サイクル保持部124に登録する。
【0053】
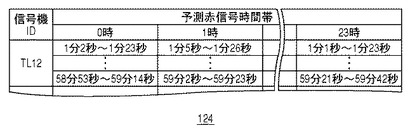
図11は、予測サイクル保持部124の一例を示すデータ構造図である。予測サイクル保持部124は、信号機IDと、予測赤信号時間帯と、を対応付けて保持する。
【0054】
図4に戻り、NS速度演算部144は、予測サイクル保持部124に保持される情報に基づいて、ある信号機を通過した自動車がその次の信号機を赤信号で止められずに通過できる速度であるノンストップ速度(以下、NS速度と称す)を演算する。特にNS速度演算部144は、ある時刻にある交差点間リンクに進入した自動車について、その先その交差点間リンクと同じ道路種別の交差点間リンクをもっとも多くノンストップで進める速度をNS速度として演算する。NS速度演算部144は、演算されたNS速度と、対応する交差点間リンクを特定する交差点間リンクIDと、上り下りの別と、その交差点間リンクへ進入する時刻である進入時刻と、を対応付けてNS速度保持部126に登録する。
【0055】
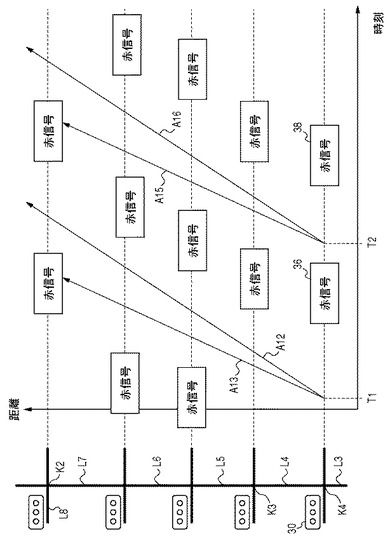
図12は、NS速度の演算を説明するための説明図である。図12に示されるグラフの横軸は時刻、縦軸は距離を示す。この距離は図2の東西方向の2車線道路24cに沿った距離である。図12では特に図2に示される交差点間リンクL3、L4、L5、L6、L7、L8が示される。図12では、信号機30について予測サイクル保持部124に保持される予測赤信号時間帯36、38が示されている。他の信号機についても同様に予測サイクル保持部124に保持される予測赤信号時間帯が示されている。
【0056】
ここで1日の中の時刻T1に交差点間リンクL4に上りで進入する自動車について、NS速度演算部144は、矢印A12の傾きで示される速度をNS速度として演算する。これが例えば矢印A13の傾きで示される速度で自動車が交差点間リンクL4を進んだ場合でも交差点K3はノンストップで通過できる。しかしながらその場合、交差点間リンクL7と交差点間リンクL8とが交わる交差点K2において赤信号で停止することが予測される。対して矢印A12の傾きで示される速度で進んだ場合、その交差点K2もノンストップで通過できることが期待される。
同様に、1日の中の時刻T2に交差点間リンクL4に上りで進入する自動車について、NS速度演算部144は、矢印A15ではなく矢印A16の傾きで示される速度をNS速度として演算する。
【0057】
図13は、NS速度保持部126の一例を示すデータ構造図である。NS速度保持部126は、交差点間リンクIDと、上り下りの別と、交差点間リンクへの進入時刻と、NS速度と、を対応付けて保持する。
【0058】
図4に戻り、NS速度演算部144は、演算されたNS速度に対応する交差点間リンクに対して設定されている法定の制限速度をマップ情報保持部114から取得する。NS速度演算部144は、演算されたNS速度が取得された制限速度を超える場合、そのNS速度を破棄する。あるいはまた、NS速度演算部144は、そのNS速度を警告と共にNS速度保持部126に登録する。すなわち、NS速度演算部144は、そのようなNS速度を値としては残すがユーザの用には供さないための処理を行う。
【0059】
ルート情報提供部110は、自動車に搭載された車載器のカーナビゲーション機能のためのルート情報をネットワーク20を介して提供する。ルート情報提供部110は、ルート生成部146と、ルート情報送信部148と、を含む。
【0060】
ルート生成部146は、ネットワーク20を介して車載器からルート要求を受信する。ルート生成部146は、ルート要求が受信されると、マップ情報保持部114に保持される道路地図情報とNS速度保持部126に保持されるNS速度とに基づいてNSルートを生成する。ルート生成部146は、NSルートおよびそのNSルートに関するNS速度の組と、公知の旅行速度に基づく最速ルートおよびその旅行速度の組と、を含むルート情報を生成する。
ルート情報送信部148は、ルート生成部146によって生成されたルート情報を、ルート要求の送信元の車載器にネットワーク20を介して送信する。
【0061】
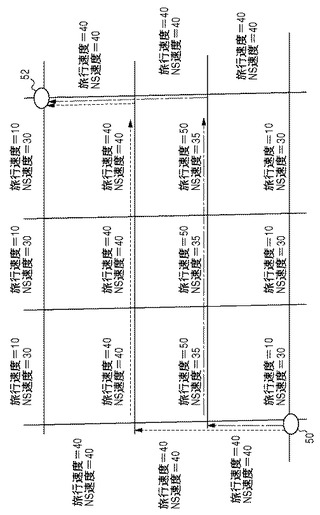
図14は、ルート生成部146におけるNSルートの生成処理を説明するための説明図である。受信されたルート要求に含まれる出発地の位置50と目的地の位置52との間には走行可能な道路が図14のように複数存在するとする。図14には、各交差点間リンクについて、現在の旅行速度(その路線において、実際に車両が走行している速度であり、リアルタイムにプローブ車両から取得できる)とNS速度保持部126から取得されるNS速度が示されている。
【0062】
ルート生成部146は、各交差点間リンクにおけるNS速度を、ルート要求の送信元の自動車がそのルートを走行する場合に交差点間リンクに進入する進入時刻を基準にして、NS速度保持部126から取得する。例えば、ある交差点間リンクを6秒で通過すると計算される場合(交差点間リンクの距離がマップ情報保持部114に保持される道路地図情報から分かるので、NS速度から所要時間が計算される)、開始交差点間リンクへの進入時刻が15:00:00であれば、次の交差点間リンクへの進入時刻は15:00:06である。
【0063】
最速ルートは現在の旅行速度が最も速い路線を組み合わせたものであり、例えば図14中の一点鎖線で示されるルートである。ただしここでは単純化して説明するため、交差点を曲がる時間はゼロとして計算している。ルート生成部146は、このような最速ルートを生成する。
【0064】
NSルートはNS速度が現在の旅行速度を下回るものの中で、最も早いNS速度を有する路線を組み合わせたものであり、例えば図14中の破線で示されるルートである。図14において、下から2つ目のNS速度は35であるが、下から3つ目のNS速度は40であり35よりも大きいため、下から3つ目の経路をNSルートの一部として選定している。ルート生成部146は、このようなNSルートを生成する。
【0065】
NSルートについて、各道路リンクの旅行時間を積算すれば最速ルートより多くの時間がかかるが、交差点をノンストップで走行できる可能性が高いため、かえって最速ルートより早く目的地に着く可能性がある。
【0066】
図4に戻り、ルート情報提供部110は、自動車に搭載された車載器のカーナビゲーション機能がルート案内中の場合にNS速度をその車載器に提供してもよい。すなわち、ルート情報提供部110は、自動車のドライバによって選択されたルートに基づいて、その自動車が現在走行している路線をどこまで走るかを判定する。ルート情報提供部110は、判定結果から現在走行している交差点間リンクにおけるNS速度をNS速度保持部126から抽出する。ルート情報提供部110は、NS速度を抽出する際は交差点間リンクへの進入時刻が同じ条件のものを抽出する。ルート情報提供部110は、抽出されたNS速度を当該路線を走行中の自動車へ送り、ナビゲーション画面に表示させるかまたは音声で伝える。
【0067】
あるいはまた、ルート情報提供部110は、ポータブルカーナビ、スマートフォン、携帯電話などにNS速度を送信し、その画面にNS速度を表示させるかまたは音声で伝えてもよい。ルート情報提供部110は、自動車が右左折した場合は、当該路線の交差点間リンクにおけるNS速度を提供してもよい。
【0068】
また、ルート情報提供部110は、自動車に搭載された車載器のカーナビゲーション機能がルート案内はしていないが自車位置を表示中の場合、その自車位置に対応するNS速度をその車載器に提供してもよい。
【0069】
サイクル更新部112に関して、後日に各信号機において、赤信号のはずなのに通過する自動車や青信号なのに停止している自動車が走行情報から散見されるようになった場合は、その信号機の前後などを含めて走行情報を確認し、再度サイクルを推定し直すことが望ましい。この原因としては、信号機が新設されたことにより、既存の信号機のサイクルが変更されたり、警察によりサイクルが修正されたことなどが考えられる。
【0070】
サイクル更新部112は、期間判定部150と、期間更新部152と、を含む。期間判定部150は、信号前停止期間取得部106によって取得された信号前停止期間と実測サイクル保持部125によって保持される対応する過去の実測赤信号期間との整合性を判定する。すなわち、期間判定部150は、取得された信号前停止期間が予測サイクル保持部124に保持される予測赤信号時間帯と所定の割合以上重なり合っている場合は整合すると判定し、そうでない場合は整合しないと判定する。
【0071】
期間更新部152は、期間判定部150において整合しないと判定された場合、信号前停止期間取得部106によって取得された信号前停止期間を含みそれ以降取得される信号前停止期間によって実測サイクル保持部125を更新する。例えば期間更新部152は期間判定部150において整合しないと判定された場合、整合しないと判定された信号機について実測サイクル保持部125に保持されている情報を破棄してもよい。サイクル演算部142は、その信号機についてそれ以降取得される信号前停止期間を組み合わせることによって、その信号機の実測赤信号期間を演算し、実測サイクル保持部125に登録してもよい。
【0072】
上述の実施の形態において、保持部の例は、ハードディスクやメモリである。また、本明細書の記載に基づき、各部を、図示しないCPUや、インストールされたアプリケーションプログラムのモジュールや、システムプログラムのモジュールや、ハードディスクから読み出したデータの内容を一時的に記憶するメモリなどにより実現できることは本明細書に触れた当業者には理解されるところである。
【0073】
以上の構成による走行情報演算装置100の動作を説明する。
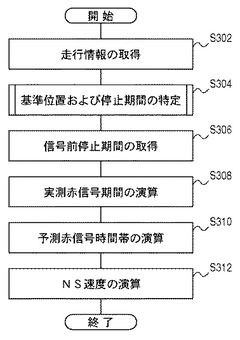
図15は、走行情報演算装置100における一連の処理の一例を示すフローチャートである。走行情報演算装置100は走行情報を取得する(S302)。走行情報演算装置100は、図7に示される処理により基準位置および停止期間を特定する(S304)。走行情報演算装置100は信号前停止期間を取得する(S306)。走行情報演算装置100は実測赤信号期間を演算する(S308)。走行情報演算装置100は予測赤信号時間帯を演算する(S310)。走行情報演算装置100はNS速度を演算する(S312)。
【0074】
本実施の形態に係る走行情報演算装置100によると、車両が信号機から直接サイクルの情報を受ける仕組みが信号機の側にも車両の側にも整っていない状況および一般の車両が利用可能なGPSの精度が比較的低い状況において、信号機のサイクルを推測できるより現実的な解を提供できる。
【0075】
特に走行情報演算装置100では、GPSの測位誤差を吸収できる程度の大きさの位置範囲を設け、測定位置がその位置範囲内に連続して検出されると、それを車両の停止として検出する。これにより、GPSの精度が例えば特許文献2に示される手法で要求されるものよりも低くても、十分に正確に信号機のサイクルを推測できる。言い換えると、GPSの精度に制限されないより適用範囲の広いサイクルの推測の手法が提供される。
【0076】
また、本実施の形態に係る走行情報演算装置100ではNS速度が演算される。このNS速度は車両の通行を効率化するための様々なシステムで使用されうる。例えば上述のようにカーナビゲーションにおけるルート情報の選定で使用されうる。ドライバがNSルートをNS速度で走行する場合、交差点をノンストップで走行できる可能性が高まる。これにより、車両の燃費が良くなる。その結果、ドライバの出費を低減できるとともに、地球環境への負荷の低減に貢献できる。
【0077】
また、制限速度を超えるNS速度は基本的に使用されず、さらにドライバは赤信号に引っかからないように焦ることもないため、安全運転を促進できる。
【0078】
また、本実施の形態に係る走行情報演算装置100は、現在取得されているサイクルと記憶されているサイクルとに齟齬が生じた場合、サイクルを自動的に更新する。したがって、信号機の新設や制御の変更などにも対応できる。
【0079】
以上、実施の形態に係る走行情報演算装置100の構成と動作について説明した。この実施の形態は例示であり、その各構成要素や各処理の組み合わせにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
【0080】
実施の形態では、自動車の車載器がルート要求を送信し、それに応じたルート情報を受信する場合について説明したが、これに限られず、自動車の車載器は走行情報演算装置100からNS速度の情報を受信し、受信したNS速度の情報に基づいてその車載器がNSルートを生成してもよい。
【0081】
実施の形態では、信号機が自動車に停止の指示を提示する状態として信号機が赤信号となっている状態を採用する場合について説明したが、これに限られず、信号機が車両に停止の指示を提示する状態は例えば各国の法令等により異なってもよい。
【0082】
実施の形態では、走行情報演算装置100はまず停止の基準位置を求め、その基準位置が信号機の位置と対応するか否かを判定する場合について説明したが、これに限られず、例えば走行情報演算装置100は、信号機の位置の周りの所定の範囲内に走行情報が所定の数以上連続して存在するか否かを判定してもよい。
【符号の説明】
【0083】
2 ナビゲーションシステム、 20 ネットワーク、 100 走行情報演算装置、 102 走行情報取得部、 104 停止検出部、 106 信号前停止期間取得部、 108 演算部、 110 ルート情報提供部、 112 サイクル更新部、 114 マップ情報保持部、 116 走行情報保持部、 118 並び替え情報保持部、 120 停止期間保持部、 122 信号前停止期間保持部、 124 予測サイクル保持部、 125 実測サイクル保持部、 126 NS速度保持部。
【技術分野】
【0001】
本発明は、走行情報演算装置および走行情報演算情報に関し、特に車両から走行情報を収集して処理する走行情報演算技術に関する。
【背景技術】
【0002】
道路を走行する自動車が交通信号機(以下、単に信号機と称す)で停止することなく連続的に走行できれば、その自動車の燃費は格段に良くなるであろう。自動車の停止と発進には比較的多くの燃料が必要とされるからである。
【0003】
そこでまず考えられるのは、信号機のサイクルを直接信号機から取得して利用することである(例えば、特許文献1参照)。しかしながら、この手法は現実的ではない。現時点では、個々の信号機からその信号機のサイクルを車両に向けて発信するような仕組みが構築されていないからである。なお、現在研究目的等でそのような仕組みを開発する動きはあるが、全国津々浦々の信号機の全てにそのような仕組みが取り付けられる可能性は低く、それが実現されるとしても相当に時間がかかるであろう。
【0004】
考えられる別の解は走行中の自動車から情報を収集して信号機のサイクルを推定することである。例えば特許文献2には、信号機の手前で停止している車列の各車両が青信号で発進したり赤信号で停止したりする流れを交通流の粗密波の流れに見立てた上で、信号機の切り替わり時刻を推定する手法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−296798号公報
【特許文献2】特開2009−116508号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献2に示される手法では、交差点付近での車両の移動距離を比較的精度良く測定する必要があり、したがって車両を比較的正確に位置決めする必要がある。車両の位置を特定するためのGPS(Global Positioning System)などの測位システムの精度は年々向上してきてはいるが、特許文献2に示される手法で要求されるような高い精度を提供できるものはまだ少ない。したがって、特許文献2に示される手法では、推定に必要な質と量のデータを集めることができないかまたは集めるのに時間がかかる虞がある。
【0007】
本発明はこうした課題に鑑みてなされたものであり、その目的は、測位システムの精度がそれほど高くなくても車両から得られる情報から信号機のサイクルを推測できる技術の提供にある。
【課題を解決するための手段】
【0008】
本発明のある態様は走行情報演算装置に関する。この走行情報演算装置は、車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得する走行情報取得部と、走行情報取得部によって取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定する停止検出部と、停止検出部によって特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、停止検出部によって特定された期間を当該信号機に対応する期間として取得する停止期間取得部と、を備える。
【0009】
この態様によると、車両の測定された位置の精度が比較的低い場合でも、その位置が所定の位置範囲内にとどまっていればそれをその車両の停止として検出することができる。
【0010】
なお、以上の構成要素の任意の組み合わせや、本発明の構成要素や表現を装置、方法、システム、コンピュータプログラム、コンピュータプログラムを格納した記録媒体などの間で相互に置換したものもまた、本発明の態様として有効である。
【発明の効果】
【0011】
本発明によれば、測位システムの精度がそれほど高くなくても車両から得られる情報から信号機のサイクルを推測できる。
【図面の簡単な説明】
【0012】
【図1】実施の形態に係る走行情報演算装置を備えるナビゲーションシステムの構成を示す模式図である。
【図2】走行情報を説明するための説明図である。
【図3】本実施の形態に係る走行情報演算装置において行われる信号機のサイクルの推測を説明するための説明図である。
【図4】実施の形態に係る走行情報演算装置の機能および構成を示すブロック図である。
【図5】図4の走行情報保持部の一例を示すデータ構造図である。
【図6】図4の並び替え情報保持部の一例を示すデータ構造図である。
【図7】図4の並び替え情報処理部における一連の処理の一例を示すフローチャートである。
【図8】図4の停止期間保持部の一例を示すデータ構造図である。
【図9】図4の信号前停止期間保持部の一例を示すデータ構造図である。
【図10】図4の実測サイクル保持部に保持される実測赤信号期間を説明するための説明図である。
【図11】図4の予測サイクル保持部の一例を示すデータ構造図である。
【図12】NS速度の演算を説明するための説明図である。
【図13】図4のNS速度保持部の一例を示すデータ構造図である。
【図14】図4のルート生成部におけるNSルートの生成処理を説明するための説明図である。
【図15】図4の走行情報演算装置における一連の処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。
【0014】
図1は、実施の形態に係る走行情報演算装置100を備えるナビゲーションシステム2の構成を示す模式図である。ナビゲーションシステム2は、自動車10、14などの車両に搭載された車載器12、16と、基地局18と、インターネットなどのネットワーク20と、本実施の形態に係る走行情報演算装置100と、を備える。
【0015】
車載器12、16は、GPSなどの測位システムを使用して、それが搭載されている自動車10、14の測定された位置(以下、測定位置と称す)とその測定が行われた時刻である測定時刻とを取得する。この測定位置は任意の座標系で表されてもよく、例えば緯度および経度で表される。車載器12、16は、それが搭載されている自動車10、14を特定する車両IDと測定位置と測定時刻とを含む走行情報を生成し、生成された走行情報を基地局18、ネットワーク20を介して走行情報演算装置100に送信する。この観点から、車載器12、16は走行情報を送信する通信装置であると言える。また、測定位置および測定時刻の取得および走行情報の送信は、所定の時間間隔、例えば4秒間隔で行われる。走行情報演算装置100はそのようにして送信された走行情報を受信し、保持する。
【0016】
車載器12、16はまた、出発地の位置と目的地の位置とを含みルート案内を要求するルート要求を、基地局18、ネットワーク20を介して走行情報演算装置100に送信する。車載器12、16は、ルート要求に応じて走行情報演算装置100で生成されるルート情報を、ネットワーク20、基地局18を介して受信する。車載器12、16は、受信されたルート情報に基づくナビゲーション画面を不図示のディスプレイに表示させる。
【0017】
基地局18は道路の傍の建物等に設けられ、車載器12、16と無線により通信を行う。基地局18は車載器12、16から受信した情報をネットワーク20に送信し、またネットワーク20から車載器12、16宛に送られてきた情報を車載器12、16に送信する。ネットワーク20は基地局18および走行情報演算装置100と接続される。
【0018】
図2は、走行情報を説明するための説明図である。図2の紙面上下方向は例えば南北方向であり、この方向に沿って7本の2車線道路22a、22b、22c、22d、22e、22f、22gが設けられている。図2の紙面左右方向は例えば東西方向であり、この方向に沿って4本の2車線道路24a、24b、24c、24dが設けられている。南北方向の2車線道路と東西方向の2車線道路との交差点のそれぞれには、南北方向の2車線道路について2つ、東西方向の2車線道路について2つの計4つの信号機が設けられている。
【0019】
ここで自動車10が交差点間リンクL1、L2、L3、L4、L5、L6、L7、L8、L9をこの順に通過し、自動車10の車載器12がその間走行情報を送信したとする。図2中の灰色の丸は車載器12から送信されてきた走行情報に含まれる測定位置を表す。
【0020】
一般にGPSによる測位の精度は道路の幅と比べて粗く、したがって、自動車10は実際は道路を走っているのであるが測定位置は道路から少し外れた箇所になることも多い。特に建物が周りにある場合、測定位置は道路から大きくずれることもある(例えば図2中の丸26)。走行情報演算装置100は、既知の道路地図の情報と自動車の前後の軌跡などから正確な位置を推測する公知のマップマッチングの技術を使用して、受信した走行情報を処理してもよい。マップマッチングの結果、例えば丸26で示される測定位置は丸28で示される位置に修正される。
【0021】
交差点間リンクL1と交差点間リンクL2とが交わる交差点K1および交差点間リンクL7と交差点間リンクL8とが交わる交差点K2で自動車10が赤信号で停止したとする。すると、図2にも示されるように交差点K1および交差点K2の周囲で測定位置が所定の大きさの位置範囲30、32内で固まって検出される。なお、GPSの粗い精度のため、自動車10が実際には停止していても測定位置はその実際の停止位置の周りに分散する。
【0022】
本実施の形態では想定されるGPSの精度を元に位置範囲の大きさを設定する。走行情報演算装置100は、所定数以上の測定位置がその大きさの位置範囲内に続いて検出された場合に自動車がその位置範囲内で停止していると判定する。そして、自動車が停止する理由は赤信号で停止する他にも例えば駐車場に停めることなどもあるので、走行情報演算装置100は、自動車が停止していると判定された位置範囲と既知の信号機の位置との関係に基づきそれらが対応するか否かを判定する。走行情報演算装置100は、対応すると判定された場合、その位置範囲内に測定位置が検出され続ける期間を取得する。走行情報演算装置100は、そのようにして取得された期間中、自動車がその信号機の赤信号で停止していると判定する。これにより、信号機が赤信号となっている期間を、GPSの粗い精度を考慮しても十分に正確に推測できる。
【0023】
図3は、本実施の形態に係る走行情報演算装置100において行われる信号機のサイクルの推測を説明するための説明図である。図3に示されるグラフの横軸は時刻、縦軸は距離を示す。この距離は図2の東西方向の2車線道路24cに沿った距離である。図3では特に図2に示される交差点間リンクL4、L5、L6、L7が示される。図3中の灰色の丸は車載器から送信されてきた走行情報に含まれる測定位置および測定時刻の組に対応する。交差点間リンクL4と交差点間リンクL5とが交わる交差点K3に着目すると、矢印A1、A2、A6、A7、A11で示される自動車は交差点K3を青信号で通過したと考えられる。また、矢印A3、A4、A5、A8、A9、A10で示される自動車については、交差点K3に設けられた信号機の位置の周辺で測定位置が続けて検出されているので、交差点K3で赤信号で停止したと考えられる。
【0024】
このように多くの自動車の軌跡をマッピングすることによって、信号機のサイクルを推測することができる。例えば図3の例では、交差点K3について測定位置が密集している時刻「xx:y1y2:z1z2」から時刻「xx:y3y4:z3z4」までの期間と、時刻「xx:y5y6:z5z6」から時刻「xx:y7y8:z7z8」までの期間は、東西方向に設けられた信号機が赤信号であったと推測できる。この推測結果から、信号機が次の日も同じサイクルで赤信号と青信号とを繰り返すと仮定すると、次の日の時刻「xx:y1y2:z1z2」から時刻「xx:y3y4:z3z4」までの期間と、時刻「xx:y5y6:z5z6」から時刻「xx:y7y8:z7z8」までの期間もまたこの信号機は赤信号となっていると推測される。
【0025】
このように、走行情報演算装置100は走行情報を収集してマッピングし、信号機が赤信号であった期間を推測する。そして走行情報演算装置100は、その推測された期間の情報を基に今後信号機が赤信号となるであろう期間を推測する。これにより、信号機のサイクルを直接得ることが困難な状況にあっても信号機のサイクルを統計的に推測することができる。
【0026】
なお、信号機のサイクルの制御の仕方は、例えばその信号機が設けられている道路の道路種別や曜日や平日/土日祝日の別や1日の中でも昼夜の別などにより異なりうる。しかしながら以下では説明を分かりやすくするため、推測対象の信号機は毎日同じサイクルで赤信号と青信号とを繰り返す状況を仮定する。また、信号機が黄信号となっている期間は一般に信号機が青信号や赤信号となっている期間よりもかなり短いので、以下では考慮に入れないものとする。しかしながら、信号機のサイクルの制御の仕方が道路種別や曜日などで異なる場合は、例えば信号機のサイクルの制御の仕方が同じと考えられる信号機単位で、または信号機のサイクルの制御の仕方が同じと考えられる期間の単位で、以下と同様の処理を行えばよいことは、本明細書に触れた当業者には明らかである。また、信号機の黄信号、赤信号点滅状態などを考慮する場合でも以下と同様の説明が成立することは、本明細書に触れた当業者には明らかである。
【0027】
図4は、実施の形態に係る走行情報演算装置100の機能および構成を示すブロック図である。ここに示す各ブロックは、ハードウエア的には、コンピュータのCPU(central processing unit)をはじめとする素子や機械装置で実現でき、ソフトウエア的にはコンピュータプログラム等によって実現されるが、ここでは、それらの連携によって実現される機能ブロックを描いている。したがって、これらの機能ブロックはハードウエア、ソフトウエアの組合せによっていろいろなかたちで実現できることは、本明細書に触れた当業者には理解されるところである。
【0028】
走行情報演算装置100は、走行情報取得部102と、停止検出部104と、信号前停止期間取得部106と、演算部108と、ルート情報提供部110と、サイクル更新部112と、マップ情報保持部114と、走行情報保持部116と、並び替え情報保持部118と、停止期間保持部120と、信号前停止期間保持部122と、予測サイクル保持部124と、実測サイクル保持部125と、NS速度保持部126と、を備える。
【0029】
マップ情報保持部114は所与の道路地図情報を保持し、例えば交差点間リンクの位置や長さおよび信号機を特定する信号機IDおよびその信号機の位置を保持する。マップ情報保持部114は、例えば財団法人日本デジタル道路地図協会が提供するデジタル道路地図データベースから得られる情報を保持してもよい。
【0030】
走行情報取得部102は、自動車に搭載された車載器から走行情報をネットワーク20を介して取得し、走行情報保持部116に登録する。走行情報取得部102は、走行情報受信部128と、マップマッチング部130と、走行情報登録部132と、を含む。
【0031】
走行情報受信部128は、ネットワーク20から走行情報を受信する。
マップマッチング部130は、走行情報受信部128によって受信された走行情報から測定位置を抽出する。マップマッチング部130は、抽出された測定位置に対してマップ情報保持部114を参照してマップマッチング処理を行う。
走行情報登録部132は、マップマッチング部130によってマップマッチング処理された測定位置を含む走行情報を走行情報保持部116に登録する。
【0032】
図5は、走行情報保持部116の一例を示すデータ構造図である。走行情報保持部116は、走行情報に含まれる車両IDと、測定時刻と、測定位置としての緯度および経度と、を対応付けて保持する。
【0033】
図4に戻り、停止検出部104は、走行情報保持部116に保持されている走行情報をもとに自動車が所定の大きさの位置範囲内にとどまっているか否かを判定し、とどまっていると判定された場合はその位置範囲を代表する基準位置を特定し、その位置範囲にとどまっている期間を停止期間として特定する。停止検出部104は、情報並び替え部134と、並び替え情報処理部136と、を含む。
【0034】
情報並び替え部134は、走行情報保持部116から走行情報を車両IDごとに抽出し、抽出された走行情報を測定時刻についてソーティングし、並び替え情報保持部118に登録する。
図6は、並び替え情報保持部118の一例を示すデータ構造図である。
【0035】
図7は、並び替え情報処理部136における一連の処理の一例を示すフローチャートである。並び替え情報処理部136は、まだ処理対象とされていない車両IDのなかから、処理対象の車両IDを選択する(S202)。並び替え情報処理部136は、並び替え情報保持部118から処理対象の車両IDについての走行情報を抽出する(S204)。並び替え情報処理部136は、抽出された走行情報について測定時刻の昇順で測定位置間の距離を演算する(S206)。並び替え情報処理部136は例えば、ある測定時刻(以下、第1測定時刻と称す)における測定位置と次の測定時刻(以下、第2測定時刻と称す)における測定位置との距離を演算する。
【0036】
並び替え情報処理部136は演算された距離と所定の誤差相当距離とを比較する(S208)。並び替え情報処理部136は、演算された距離のほうが小さい場合(S208のY)、第1測定時刻とその時刻における測定位置と第2測定時刻とその時刻における測定位置とを不図示の一時保持部に登録する(S210)。また並び替え情報処理部136は、自動車の停止を検出するためのパラメータである検出数をインクリメントする(S212)。例えば、並び替え情報処理部136は、最初は検出数を0から2とし、それ以降は検出数を+1する。並び替え情報処理部136は、抽出された走行情報のなかにまだ距離演算の対象となっていない走行情報が存在するか否かを判定する(S214)。存在する場合(S214のY)、処理はS206に戻る。
【0037】
並び替え情報処理部136は、ステップS208における比較の結果、演算された距離のほうが大きいか誤差相当距離と等しい場合(S208のN)、その時点での検出数と所定のしきい値検出数とを比較する(S216)。並び替え情報処理部136は、検出数がしきい値検出数よりも大きい場合(S216のY)、一時保持部に保持される測定位置の平均位置を演算し、演算結果を停止の基準位置として特定する(S218)。また、並び替え情報処理部136は、一時保持部に登録されている測定時刻のうちの最初の時刻を停止期間の開始時刻として、最後の時刻を停止期間の終了時刻として特定する(S218)。
【0038】
並び替え情報処理部136は、車両IDと、特定された停止の基準位置と、特定された停止期間の開始時刻と、特定された停止期間の終了時刻と、を対応付けて停止期間保持部120に登録する(S220)。その後、並び替え情報処理部136は検出数を0に戻し、処理をステップS214に進める。並び替え情報処理部136は、ステップS216における比較の結果、検出数がしきい値検出数よりも小さいか等しい場合(S216のN)、検出数を0に戻し、処理をステップS214に進める。
【0039】
並び替え情報処理部136は、ステップS214において未処理の走行情報が存在しないと判定された場合(S214のN)、並び替え情報保持部118に登録されている車両IDのなかでまだ並び替え情報処理部136によって処理対象とされていない車両IDがあるか否かを判定する(S222)。並び替え情報処理部136は、未処理の車両IDが存在する場合(S222のY)、処理をステップS202に進める。並び替え情報処理部136は、未処理の車両IDが存在しない場合(S222のN)、処理を終了する。
【0040】
このようにして並び替え情報処理部136は、誤差相当距離に基づく大きさを有する位置範囲内にしきい値検出数×走行情報取得間隔よりも長く自動車がとどまっていれば、その位置範囲の基準位置とそこにとどまっている停止期間とを停止期間保持部120に登録する。
【0041】
なお、誤差相当距離は、測定位置について想定される誤差の大きさに応じた値に設定されてもよく、例えばGPSの誤差を基に定められてもよい。
また、信号機が赤信号となっている期間の一般的な長さに基づいて検出数の上限値を設けてもよい。この場合、例えば自動車が信号機の一回のサイクルでその信号機を通過できなかった場合を検出し、そのような場合のデータを破棄することができる。
また、自動車が位置範囲内にとどまった後右折したかまたは左折した場合、そのデータを破棄してもよい。右折や左折の場合は信号機以外にも対向車線からの自動車の有無や横断歩道を渡る歩行者の有無などによって停止期間が変わりうるからである。
【0042】
図8は、停止期間保持部120の一例を示すデータ構造図である。停止期間保持部120は、車両IDと、停止の基準位置と、停止期間の開始時刻と、停止期間の終了時刻と、を対応付けて保持する。
【0043】
図4に戻り、信号前停止期間取得部106は、停止検出部104によって特定された停止の基準位置と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、その基準位置に対応する停止期間を当該信号機に対応する信号前停止期間として取得する。信号前停止期間は例えば自動車が信号機の赤信号によってその信号機の前で停止した期間である。しかしながら、例えば乗降のためにその信号機の傍で一時的に停車する場合なども考えられるので、信号前停止期間は自動車が赤信号で停止した期間の候補であると言える。信号前停止期間取得部106は、位置対応判定部138と、信号前停止期間特定部140と、を含む。
【0044】
位置対応判定部138は、停止期間保持部120から停止の基準位置を取得する。位置対応判定部138は、取得された基準位置に最も近い信号機の位置をマップ情報保持部114から取得する。位置対応判定部138は取得された基準位置と取得された信号機の位置との距離を演算する。位置対応判定部138は、演算された距離が所定の対応距離よりも小さい場合、取得された基準位置とそれに最も近い信号機とが対応すると判定する。この対応距離は例えば誤差相当距離と同じに設定されてもよい。
【0045】
信号前停止期間特定部140は、位置対応判定部138において基準位置と信号機とが対応すると判定された場合、停止期間保持部120から、その基準位置に対応する停止期間を当該信号機に対応する信号前停止期間として取得する。信号前停止期間特定部140は、信号機を特定する信号機IDと、その信号機について取得された信号前停止期間の開始時刻と、その信号機について取得された信号前停止期間の終了時刻と、を対応付けて信号前停止期間保持部122に登録する。
図9は、信号前停止期間保持部122の一例を示すデータ構造図である。
【0046】
図4に戻り、演算部108は、サイクル演算部142と、NS速度演算部144と、を含む。
サイクル演算部142は、所定の信号機について信号前停止期間取得部106によって取得される複数の信号前停止期間を組み合わせることによって、その信号機が赤信号となっている期間を演算する。
【0047】
例えばサイクル演算部142は、信号前停止期間保持部122から所定の信号機についての信号前停止期間を抽出する。サイクル演算部142は、抽出された信号前停止期間のうちのN(Nは2以上の整数)個以上の信号前停止期間が重なり合う場合、その重なり合っている期間を所定の信号機が赤信号となっている実測赤信号期間として決定する。このNの値は測定位置の誤差等を考慮して決定されてもよい。
【0048】
例えば図9に示される信号前停止期間保持部122についてN=3とすると、信号機ID「TL12」について3つの信号前停止期間「2009/5/2 14:20:19〜2009/5/2 14:20:39」、「2009/5/2 14:20:21〜2009/5/2 14:20:40」、「2009/5/2 14:20:23〜2009/5/2 14:20:41」が重なり合っているので、サイクル演算部142はそれらが重なり合う部分の期間「2009/5/2 14:20:23〜2009/5/2 14:20:39」を信号機ID「TL12」によって特定される信号機の実測赤信号期間として決定する。
【0049】
サイクル演算部142は、決定された実測赤信号期間と所定の信号機の信号機IDとを対応付けて実測サイクル保持部125に登録する。これにより、収集された走行情報から各信号機が赤信号となっている期間すなわちサイクルを測定し蓄積することができる。
【0050】
図10は、実測サイクル保持部125に保持される実測赤信号期間を説明するための説明図である。図10に示されるグラフの横軸は時刻、縦軸は距離を示す。この距離は図2の東西方向の2車線道路24cに沿った距離である。図10では特に図2に示される交差点間リンクL3、L4、L5、L6、L7が示される。図10で一点鎖線で示される現在時刻は、走行情報保持部116に保持される走行情報を処理している現在の時刻を示す。以下、東から西に向かう向きを上りとする。実測サイクル保持部125は、交差点間リンクL3と交差点間リンクL4とが交わる交差点K4に設けられた4つの信号機のうち東西方向の上りの信号機30について、赤信号となっている実測赤信号期間32、34を保持する。実測サイクル保持部125は他の信号機についても同様に実測赤信号期間を保持する。
【0051】
サイクル演算部142は、実測サイクル保持部125に保持される情報から、将来、所定の信号機が赤信号となるであろう期間を予測する。特に本実施の形態では上述の通り、予測対象の信号機では毎日同じサイクルが繰り返されるという前提のもとで予測される。すなわち、ある信号機について過去14時10分15秒から36秒まで赤信号であったなら、本日および次の日もその信号機は14時10分15秒から36秒まで赤信号となると予測する。サイクル演算部142は実測サイクル保持部125から、各信号機について実測赤信号期間を数日または数ヶ月分取得し、それを一日を単位として統計処理する。
【0052】
サイクル演算部142は、M(Mは2以上の整数)日分以上の実測赤信号期間が重なり合う1日の中の時間帯を、信号機が赤信号となるであろう時間帯である予測赤信号時間帯として決定してもよい。例えば、ある信号機について実測赤信号期間が1日前は14時30分25秒〜14時30分45秒、2日前は14時30分24秒〜14時30分46秒、3日前は14時30分25秒〜14時30分44秒となっている場合、サイクル演算部142はそれらが重なり合う部分の時間帯である14時30分25秒〜14時30分44秒を予測赤信号時間帯として決定する。
サイクル演算部142は、決定された予測赤信号時間帯を信号機ごとに予測サイクル保持部124に登録する。
【0053】
図11は、予測サイクル保持部124の一例を示すデータ構造図である。予測サイクル保持部124は、信号機IDと、予測赤信号時間帯と、を対応付けて保持する。
【0054】
図4に戻り、NS速度演算部144は、予測サイクル保持部124に保持される情報に基づいて、ある信号機を通過した自動車がその次の信号機を赤信号で止められずに通過できる速度であるノンストップ速度(以下、NS速度と称す)を演算する。特にNS速度演算部144は、ある時刻にある交差点間リンクに進入した自動車について、その先その交差点間リンクと同じ道路種別の交差点間リンクをもっとも多くノンストップで進める速度をNS速度として演算する。NS速度演算部144は、演算されたNS速度と、対応する交差点間リンクを特定する交差点間リンクIDと、上り下りの別と、その交差点間リンクへ進入する時刻である進入時刻と、を対応付けてNS速度保持部126に登録する。
【0055】
図12は、NS速度の演算を説明するための説明図である。図12に示されるグラフの横軸は時刻、縦軸は距離を示す。この距離は図2の東西方向の2車線道路24cに沿った距離である。図12では特に図2に示される交差点間リンクL3、L4、L5、L6、L7、L8が示される。図12では、信号機30について予測サイクル保持部124に保持される予測赤信号時間帯36、38が示されている。他の信号機についても同様に予測サイクル保持部124に保持される予測赤信号時間帯が示されている。
【0056】
ここで1日の中の時刻T1に交差点間リンクL4に上りで進入する自動車について、NS速度演算部144は、矢印A12の傾きで示される速度をNS速度として演算する。これが例えば矢印A13の傾きで示される速度で自動車が交差点間リンクL4を進んだ場合でも交差点K3はノンストップで通過できる。しかしながらその場合、交差点間リンクL7と交差点間リンクL8とが交わる交差点K2において赤信号で停止することが予測される。対して矢印A12の傾きで示される速度で進んだ場合、その交差点K2もノンストップで通過できることが期待される。
同様に、1日の中の時刻T2に交差点間リンクL4に上りで進入する自動車について、NS速度演算部144は、矢印A15ではなく矢印A16の傾きで示される速度をNS速度として演算する。
【0057】
図13は、NS速度保持部126の一例を示すデータ構造図である。NS速度保持部126は、交差点間リンクIDと、上り下りの別と、交差点間リンクへの進入時刻と、NS速度と、を対応付けて保持する。
【0058】
図4に戻り、NS速度演算部144は、演算されたNS速度に対応する交差点間リンクに対して設定されている法定の制限速度をマップ情報保持部114から取得する。NS速度演算部144は、演算されたNS速度が取得された制限速度を超える場合、そのNS速度を破棄する。あるいはまた、NS速度演算部144は、そのNS速度を警告と共にNS速度保持部126に登録する。すなわち、NS速度演算部144は、そのようなNS速度を値としては残すがユーザの用には供さないための処理を行う。
【0059】
ルート情報提供部110は、自動車に搭載された車載器のカーナビゲーション機能のためのルート情報をネットワーク20を介して提供する。ルート情報提供部110は、ルート生成部146と、ルート情報送信部148と、を含む。
【0060】
ルート生成部146は、ネットワーク20を介して車載器からルート要求を受信する。ルート生成部146は、ルート要求が受信されると、マップ情報保持部114に保持される道路地図情報とNS速度保持部126に保持されるNS速度とに基づいてNSルートを生成する。ルート生成部146は、NSルートおよびそのNSルートに関するNS速度の組と、公知の旅行速度に基づく最速ルートおよびその旅行速度の組と、を含むルート情報を生成する。
ルート情報送信部148は、ルート生成部146によって生成されたルート情報を、ルート要求の送信元の車載器にネットワーク20を介して送信する。
【0061】
図14は、ルート生成部146におけるNSルートの生成処理を説明するための説明図である。受信されたルート要求に含まれる出発地の位置50と目的地の位置52との間には走行可能な道路が図14のように複数存在するとする。図14には、各交差点間リンクについて、現在の旅行速度(その路線において、実際に車両が走行している速度であり、リアルタイムにプローブ車両から取得できる)とNS速度保持部126から取得されるNS速度が示されている。
【0062】
ルート生成部146は、各交差点間リンクにおけるNS速度を、ルート要求の送信元の自動車がそのルートを走行する場合に交差点間リンクに進入する進入時刻を基準にして、NS速度保持部126から取得する。例えば、ある交差点間リンクを6秒で通過すると計算される場合(交差点間リンクの距離がマップ情報保持部114に保持される道路地図情報から分かるので、NS速度から所要時間が計算される)、開始交差点間リンクへの進入時刻が15:00:00であれば、次の交差点間リンクへの進入時刻は15:00:06である。
【0063】
最速ルートは現在の旅行速度が最も速い路線を組み合わせたものであり、例えば図14中の一点鎖線で示されるルートである。ただしここでは単純化して説明するため、交差点を曲がる時間はゼロとして計算している。ルート生成部146は、このような最速ルートを生成する。
【0064】
NSルートはNS速度が現在の旅行速度を下回るものの中で、最も早いNS速度を有する路線を組み合わせたものであり、例えば図14中の破線で示されるルートである。図14において、下から2つ目のNS速度は35であるが、下から3つ目のNS速度は40であり35よりも大きいため、下から3つ目の経路をNSルートの一部として選定している。ルート生成部146は、このようなNSルートを生成する。
【0065】
NSルートについて、各道路リンクの旅行時間を積算すれば最速ルートより多くの時間がかかるが、交差点をノンストップで走行できる可能性が高いため、かえって最速ルートより早く目的地に着く可能性がある。
【0066】
図4に戻り、ルート情報提供部110は、自動車に搭載された車載器のカーナビゲーション機能がルート案内中の場合にNS速度をその車載器に提供してもよい。すなわち、ルート情報提供部110は、自動車のドライバによって選択されたルートに基づいて、その自動車が現在走行している路線をどこまで走るかを判定する。ルート情報提供部110は、判定結果から現在走行している交差点間リンクにおけるNS速度をNS速度保持部126から抽出する。ルート情報提供部110は、NS速度を抽出する際は交差点間リンクへの進入時刻が同じ条件のものを抽出する。ルート情報提供部110は、抽出されたNS速度を当該路線を走行中の自動車へ送り、ナビゲーション画面に表示させるかまたは音声で伝える。
【0067】
あるいはまた、ルート情報提供部110は、ポータブルカーナビ、スマートフォン、携帯電話などにNS速度を送信し、その画面にNS速度を表示させるかまたは音声で伝えてもよい。ルート情報提供部110は、自動車が右左折した場合は、当該路線の交差点間リンクにおけるNS速度を提供してもよい。
【0068】
また、ルート情報提供部110は、自動車に搭載された車載器のカーナビゲーション機能がルート案内はしていないが自車位置を表示中の場合、その自車位置に対応するNS速度をその車載器に提供してもよい。
【0069】
サイクル更新部112に関して、後日に各信号機において、赤信号のはずなのに通過する自動車や青信号なのに停止している自動車が走行情報から散見されるようになった場合は、その信号機の前後などを含めて走行情報を確認し、再度サイクルを推定し直すことが望ましい。この原因としては、信号機が新設されたことにより、既存の信号機のサイクルが変更されたり、警察によりサイクルが修正されたことなどが考えられる。
【0070】
サイクル更新部112は、期間判定部150と、期間更新部152と、を含む。期間判定部150は、信号前停止期間取得部106によって取得された信号前停止期間と実測サイクル保持部125によって保持される対応する過去の実測赤信号期間との整合性を判定する。すなわち、期間判定部150は、取得された信号前停止期間が予測サイクル保持部124に保持される予測赤信号時間帯と所定の割合以上重なり合っている場合は整合すると判定し、そうでない場合は整合しないと判定する。
【0071】
期間更新部152は、期間判定部150において整合しないと判定された場合、信号前停止期間取得部106によって取得された信号前停止期間を含みそれ以降取得される信号前停止期間によって実測サイクル保持部125を更新する。例えば期間更新部152は期間判定部150において整合しないと判定された場合、整合しないと判定された信号機について実測サイクル保持部125に保持されている情報を破棄してもよい。サイクル演算部142は、その信号機についてそれ以降取得される信号前停止期間を組み合わせることによって、その信号機の実測赤信号期間を演算し、実測サイクル保持部125に登録してもよい。
【0072】
上述の実施の形態において、保持部の例は、ハードディスクやメモリである。また、本明細書の記載に基づき、各部を、図示しないCPUや、インストールされたアプリケーションプログラムのモジュールや、システムプログラムのモジュールや、ハードディスクから読み出したデータの内容を一時的に記憶するメモリなどにより実現できることは本明細書に触れた当業者には理解されるところである。
【0073】
以上の構成による走行情報演算装置100の動作を説明する。
図15は、走行情報演算装置100における一連の処理の一例を示すフローチャートである。走行情報演算装置100は走行情報を取得する(S302)。走行情報演算装置100は、図7に示される処理により基準位置および停止期間を特定する(S304)。走行情報演算装置100は信号前停止期間を取得する(S306)。走行情報演算装置100は実測赤信号期間を演算する(S308)。走行情報演算装置100は予測赤信号時間帯を演算する(S310)。走行情報演算装置100はNS速度を演算する(S312)。
【0074】
本実施の形態に係る走行情報演算装置100によると、車両が信号機から直接サイクルの情報を受ける仕組みが信号機の側にも車両の側にも整っていない状況および一般の車両が利用可能なGPSの精度が比較的低い状況において、信号機のサイクルを推測できるより現実的な解を提供できる。
【0075】
特に走行情報演算装置100では、GPSの測位誤差を吸収できる程度の大きさの位置範囲を設け、測定位置がその位置範囲内に連続して検出されると、それを車両の停止として検出する。これにより、GPSの精度が例えば特許文献2に示される手法で要求されるものよりも低くても、十分に正確に信号機のサイクルを推測できる。言い換えると、GPSの精度に制限されないより適用範囲の広いサイクルの推測の手法が提供される。
【0076】
また、本実施の形態に係る走行情報演算装置100ではNS速度が演算される。このNS速度は車両の通行を効率化するための様々なシステムで使用されうる。例えば上述のようにカーナビゲーションにおけるルート情報の選定で使用されうる。ドライバがNSルートをNS速度で走行する場合、交差点をノンストップで走行できる可能性が高まる。これにより、車両の燃費が良くなる。その結果、ドライバの出費を低減できるとともに、地球環境への負荷の低減に貢献できる。
【0077】
また、制限速度を超えるNS速度は基本的に使用されず、さらにドライバは赤信号に引っかからないように焦ることもないため、安全運転を促進できる。
【0078】
また、本実施の形態に係る走行情報演算装置100は、現在取得されているサイクルと記憶されているサイクルとに齟齬が生じた場合、サイクルを自動的に更新する。したがって、信号機の新設や制御の変更などにも対応できる。
【0079】
以上、実施の形態に係る走行情報演算装置100の構成と動作について説明した。この実施の形態は例示であり、その各構成要素や各処理の組み合わせにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
【0080】
実施の形態では、自動車の車載器がルート要求を送信し、それに応じたルート情報を受信する場合について説明したが、これに限られず、自動車の車載器は走行情報演算装置100からNS速度の情報を受信し、受信したNS速度の情報に基づいてその車載器がNSルートを生成してもよい。
【0081】
実施の形態では、信号機が自動車に停止の指示を提示する状態として信号機が赤信号となっている状態を採用する場合について説明したが、これに限られず、信号機が車両に停止の指示を提示する状態は例えば各国の法令等により異なってもよい。
【0082】
実施の形態では、走行情報演算装置100はまず停止の基準位置を求め、その基準位置が信号機の位置と対応するか否かを判定する場合について説明したが、これに限られず、例えば走行情報演算装置100は、信号機の位置の周りの所定の範囲内に走行情報が所定の数以上連続して存在するか否かを判定してもよい。
【符号の説明】
【0083】
2 ナビゲーションシステム、 20 ネットワーク、 100 走行情報演算装置、 102 走行情報取得部、 104 停止検出部、 106 信号前停止期間取得部、 108 演算部、 110 ルート情報提供部、 112 サイクル更新部、 114 マップ情報保持部、 116 走行情報保持部、 118 並び替え情報保持部、 120 停止期間保持部、 122 信号前停止期間保持部、 124 予測サイクル保持部、 125 実測サイクル保持部、 126 NS速度保持部。
【特許請求の範囲】
【請求項1】
車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得する走行情報取得部と、
前記走行情報取得部によって取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定する停止検出部と、
前記停止検出部によって特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、前記停止検出部によって特定された期間を当該信号機に対応する期間として取得する停止期間取得部と、を備えることを特徴とする走行情報演算装置。
【請求項2】
所定の信号機について前記停止期間取得部によって取得される複数の期間を組み合わせることによって、その信号機が停止の指示を提示する状態となっている期間を演算するサイクル演算部をさらに備えることを特徴とする請求項1に記載の走行情報演算装置。
【請求項3】
前記サイクル演算部によって演算された期間に基づいて、ある信号機を通過した車両がその次の信号機を停止の指示を受けずに通過できる速度であるノンストップ速度を演算する速度演算部をさらに備えることを特徴とする請求項2に記載の走行情報演算装置。
【請求項4】
前記速度演算部は、演算されたノンストップ速度が法定の制限速度を超える場合、そのノンストップ速度に対して所定の破棄処理を行うことを特徴とする請求項3に記載の走行情報演算装置。
【請求項5】
車両に搭載されたカーナビゲーションにおけるルート情報をネットワークを介して提供する際、前記速度演算部によって演算されたノンストップ速度に基づいてルート情報を生成するルート生成部をさらに備えることを特徴とする請求項3または4に記載の走行情報演算装置。
【請求項6】
過去に前記サイクル演算部によって演算された期間を保持するサイクル保持部と、
前記停止期間取得部によって取得された期間と前記サイクル保持部によって保持される対応する過去の期間との整合性を判定する期間判定部と、
前記期間判定部において整合しないと判定された場合、前記停止期間取得部によって取得された期間によって前記サイクル保持部を更新する期間更新部と、をさらに備えることを特徴とする請求項2から5のいずれかに記載の走行情報演算装置。
【請求項7】
車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得するステップと、
取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定するステップと、
特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、特定された期間を当該信号機に対応する期間として取得するステップと、を含むことを特徴とする走行情報演算方法。
【請求項8】
車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得する機能と、
取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定する機能と、
特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、特定された期間を当該信号機に対応する期間として取得する機能と、をコンピュータに実現させることを特徴とするコンピュータプログラム。
【請求項1】
車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得する走行情報取得部と、
前記走行情報取得部によって取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定する停止検出部と、
前記停止検出部によって特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、前記停止検出部によって特定された期間を当該信号機に対応する期間として取得する停止期間取得部と、を備えることを特徴とする走行情報演算装置。
【請求項2】
所定の信号機について前記停止期間取得部によって取得される複数の期間を組み合わせることによって、その信号機が停止の指示を提示する状態となっている期間を演算するサイクル演算部をさらに備えることを特徴とする請求項1に記載の走行情報演算装置。
【請求項3】
前記サイクル演算部によって演算された期間に基づいて、ある信号機を通過した車両がその次の信号機を停止の指示を受けずに通過できる速度であるノンストップ速度を演算する速度演算部をさらに備えることを特徴とする請求項2に記載の走行情報演算装置。
【請求項4】
前記速度演算部は、演算されたノンストップ速度が法定の制限速度を超える場合、そのノンストップ速度に対して所定の破棄処理を行うことを特徴とする請求項3に記載の走行情報演算装置。
【請求項5】
車両に搭載されたカーナビゲーションにおけるルート情報をネットワークを介して提供する際、前記速度演算部によって演算されたノンストップ速度に基づいてルート情報を生成するルート生成部をさらに備えることを特徴とする請求項3または4に記載の走行情報演算装置。
【請求項6】
過去に前記サイクル演算部によって演算された期間を保持するサイクル保持部と、
前記停止期間取得部によって取得された期間と前記サイクル保持部によって保持される対応する過去の期間との整合性を判定する期間判定部と、
前記期間判定部において整合しないと判定された場合、前記停止期間取得部によって取得された期間によって前記サイクル保持部を更新する期間更新部と、をさらに備えることを特徴とする請求項2から5のいずれかに記載の走行情報演算装置。
【請求項7】
車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得するステップと、
取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定するステップと、
特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、特定された期間を当該信号機に対応する期間として取得するステップと、を含むことを特徴とする走行情報演算方法。
【請求項8】
車両の測定された位置と測定時刻とを含む走行情報を当該車両に搭載された通信装置からネットワークを介して取得する機能と、
取得された走行情報をもとに、車両が所定の位置範囲内にとどまっている期間を特定する機能と、
特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、特定された期間を当該信号機に対応する期間として取得する機能と、をコンピュータに実現させることを特徴とするコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−221167(P2012−221167A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−85618(P2011−85618)
【出願日】平成23年4月7日(2011.4.7)
【特許番号】特許第4914525号(P4914525)
【特許公報発行日】平成24年4月11日(2012.4.11)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月7日(2011.4.7)
【特許番号】特許第4914525号(P4914525)
【特許公報発行日】平成24年4月11日(2012.4.11)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
[ Back to top ]