
走行支援で利用される情報の信頼度特定装置、方法およびプログラム
【課題】多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供。
【解決手段】プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録し、実行するプログラムを実行対象プログラムとして特定し、前記実行対象プログラムに対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する。
【解決手段】プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録し、実行するプログラムを実行対象プログラムとして特定し、前記実行対象プログラムに対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、情報の信頼度に応じて走行支援処理の処理内容を決定する走行支援で利用される情報の信頼度特定装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、走行支援を行う際に利用される情報の精度を定義する技術として各種の技術が知られている。例えば、特許文献1には、地図情報のバージョンに応じて信頼度を特定する技術や、マップマッチング履歴から求められる車両の走行履歴経路と地図情報から特定される経路とのずれに基づいて信頼度を特定する技術が開示されている。また、当該特許文献1には信頼度に基づいて車速制御やバッテリ回生制御、車線逸脱防止制御等の走行支援を行う技術が開示されている。
特許文献2には、地図情報の位置精度、地図情報の最新の調査時からの建物等の経年変化、建物等について地図情報が示す情報と実際との一致率に対応した情報精度、に基づいて地図情報の信頼度を特定する技術が開示されている。また、当該特許文献2には信頼度に基づいて停止制御、速度制限通知等の走行支援を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−147713号公報
【特許文献2】特開2007−225498号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、走行支援のそれぞれに対応した信頼度の特定法や精度情報の定義が開示されている。しかし、車両において行われる走行支援は制動補助や経路案内、注意喚起など多岐にわたっており、信頼度を特定するために参照する精度情報も車両の走行履歴の精度や地図情報の位置精度など多岐にわたっている。また、近年の車両においては、ナビゲーションシステム等によって一台の車両において多岐にわたる走行支援のそれぞれを実行可能に構成する。
【0005】
このように多岐にわたる走行支援を想定した場合、各走行支援を行う際に利用される情報の信頼度を特定するために参照すべき精度情報は、その一部あるいは全部が重複する場合が多い。従って、重複する精度情報を重複して保持すると極めて効率が悪い。さらに、精度情報が多岐にわたるため、多数の精度情報の中から走行支援のそれぞれに応じて信頼度を特定する際に参照すべき精度情報を的確に選択しなければならない。
本発明は、上記課題にかんがみてなされたもので、多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供を目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明においては、プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に定義して記録媒体に記録する。また、実行対象プログラムに対応する要素を複数の要素から選択し、選択された要素の精度情報に基づいて、実行対象プログラムの処理によって実行対象プログラムで利用される情報の信頼度を特定する。すなわち、精度情報は複数の要素毎に定義され、実行対象プログラムによって要素が選択されることによって信頼度を特定するために参照すべき要素が特定され、当該要素によって参照すべき精度情報が特定されるように構成した。
【0007】
この構成によれば、プログラム毎に精度情報を定義することなく、各プログラムで共通の情報群として定義された精度情報に基づいて信頼度を特定することが可能になり、精度情報の容量を抑制することができる。また、プログラムで利用される情報の精度を複数の要素毎に定義しているため、要素を選択することによって、参照すべき精度情報を特定することが可能になる。さらに、実行対象プログラムに対応する要素を特定することによって、信頼度を特定するために参照すべき精度情報を特定することができるため、参照すべき精度情報を容易に特定することができる。また、信頼度を特定するために参照する必要がない精度情報を参照することなく必要十分な処理によって信頼度を特定することができる。以上のように、本発明によれば、多様なプログラムで利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択することが可能になる。
【0008】
ここで、記録媒体に記録される精度情報は、プログラムで利用される情報の信頼度を特定するために利用され、当該プログラムで利用される情報の精度を複数の要素毎に示していればよい。すなわち、車両制御や注意喚起などの各種の走行支援を行う際には当該走行支援の内容に応じて車両の位置を示す情報や地図情報など、プログラムで利用される情報が特定されるが、これらのプログラムで利用される情報の全てを誤差なく規定することは現実的に不可能である。例えば、車両の位置は車両の位置を特定するセンサの精度に依存し、地図情報は地図情報作成作業の精度や新しい道路を的確に反映している度合いに依存する。そこで、本発明においては、プログラムで利用される情報の精度を精度情報として規定することとする。
【0009】
さらに、プログラムで利用される情報の精度は、種々の視点で定義することができるため、予め複数の要素を定義しておき、当該複数の要素のそれぞれについて精度を示す情報を定義して精度情報とする。すなわち、プログラムで利用される情報のそれぞれに対して複数の要素が対応づけられ、各要素について精度情報が定義される。精度情報は、プログラムで利用される情報の正確さを示す情報であり、数値の誤差を示す値であっても良いし、正確さを示す指標(例えば、複数段階で正確さを示す情報)であっても良い。
【0010】
複数の要素は、プログラムで利用される情報の精度を低下させる要因に対応した精度の分類であればよく、種々の視点で定義することができるが、各要素は独立であることが好ましい。すなわち、ある要素の精度が低下すると他の要素の精度も低下するなどの依存関係にないことが好ましい。この構成によれば、複数の要素の精度情報を総合的に考慮して信頼度を特定する際に、最小限の数の要素を考慮することによって信頼度を特定することが可能になる。また、精度情報を修正する際に、要素毎に情報を修正するのみで修正が完了するように構成することが可能である。
【0011】
プログラムは車両内に存在する制御部によって実行されて車両の走行を支援する所定の機能を実現することができればよい。走行支援は車両を運転する運転者への支援であり、プログラムで利用される情報の信頼度によってその支援の品質が変動するものを対象としている。従って、車両制御への介入、補助、警告、注意喚起等の案内など各種の走行支援を想定することができる。
【0012】
実行対象プログラム特定手段は、実行対象プログラムを特定することができればよい。すなわち、車両において実行すべき実行対象プログラムが車両の状況や車両の周囲の状況に応じて選択されれば良く、車両の状況や車両の周囲の状況に応じて特定のプログラムを実行するか否かを特定する構成や、複数のプログラムから実行対象を特定する構成等を採用可能である。
【0013】
要素選択手段は、実行対象プログラムの種類に対応する要素を選択することができればよい。すなわち、プログラムを特定すれば、その処理によって利用される情報が確定する。また、当該プログラムで利用される情報の精度を特定するために参照すべき要素は予め特定可能である。そこで、プログラムに対応する要素を選択する構成とすることで、プログラムで利用される情報の信頼度を特定するために参照すべき要素を的確に特定することが可能になる。なお、プログラムに対応する要素は、個別のプログラム毎に選択してもよいし、共通の要素の精度情報が利用されるプログラムが同じ種類となるように予めプログラムを分類し、当該プログラムの種類に対応する要素を選択する構成としても良い。
【0014】
信頼度特定手段は、選択された要素の精度情報に基づいて、プログラムで利用される情報の信頼度を特定することができればよい。すなわち、精度情報から、プログラムで利用される情報の正確さを示す信頼度を特定することができればよい。信頼度は、走行支援を行った場合に車両に与える悪影響が少ないほど高い信頼度であると定義されていればよい。例えば、プログラムで利用される情報が正確ではないが、正確であるとみなして車両の制御を行った場合に運転に与える影響の大きさ等によって信頼度を評価する構成等を採用可能である。
【0015】
さらに、プログラムで利用される情報が車両の位置を示す情報を含む構成において、精度情報が車両の周囲の地物と車両との相対関係によって特定される車両の位置を示す情報の精度を示す情報を含むように構成してもよい。この構成によれば、例えば、横断歩道や道路、道路上の白線など車両の周囲の地物を特定し、当該地物と車両との相対関係が特定の関係である場合に制動や注意喚起を行う走行支援を行う際に利用する車両の位置を示す情報の信頼度を特定することが可能になる。
【0016】
また、プログラムで利用される情報が地図情報を含む構成において、精度情報が地物に関する値を示す地図情報の誤差を示す情報と当該値の更新頻度を示す情報とを含むように構成してもよい。この構成によれば、例えば、道路上に設定されたノードや形状補間点の位置、道路の曲率半径などの地物に関する値に基づいて制動タイミングや制動量を特定する走行支援を行う際に利用する地図情報の信頼度を特定することが可能になる。さらに、地図情報が示す道路の不変性を示す情報を精度情報に含める構成としてもよい。この構成によれば、地図情報が示す道路が正確であるか否かを反映して実行対象プログラムで利用される情報の信頼度を評価することが可能になる。
【0017】
さらに、プログラムの種類は、当該種類によって参照すべき精度情報の要素が特定されるように定義されていれば良く、種々の構成を採用可能である。例えば、各プログラムで利用される情報の許容誤差に基づいて分類される構成としても良い。すなわち、各種の走行支援の中には誤った支援を行うことによる影響の程度によって、誤った支援を行うことが許容されない支援と仮に誤った支援を行ってもそれが許容される支援とが存在する。例えば、安全性向上のための制御において誤った支援を行うと安全性を低下させかねないが、利便性向上のための制御において誤った支援を行った場合、利便性が低下し得るものの安全性に影響はない。従って、前者においては誤った支援を行うことが許容されないが後者においては許容され、プログラムで利用される情報の許容誤差は前者のような走行支援の方が後者のような走行支援よりも小さい。
【0018】
また、前者のような走行支援を行う際には、精度情報から特定される信頼度に基づいて誤った支援を行わないようにプログラムによる処理内容を決定する必要がある。従って、プログラムで利用される情報の信頼度を特定するために参照すべき精度情報は、前者のような走行支援と後者のような走行支援とで異なり得る。そこで、プログラムで利用される情報の許容誤差に基づいてプログラムを複数の種類に分類すれば、プログラムの種類に対応する要素を複数の要素から選択する構成により、参照すべき精度情報を的確に選択することが可能になる。
【0019】
なお、プログラムの種類に基づいて要素を選択する構成は、上述のような許容誤差に基づいて種類を分類した構成の他にも各種の分類について適用可能である。例えば、プログラムの処理によって行われる走行支援が安全性向上を目的とした支援である場合と利便性向上を目的とした支援である場合とで異なる種類にプログラムを分類する際に、許容誤差だけでなく、他の指標に基づいて分類を行っても良い。また、プログラムの処理による制御が行われる制御対象が異なる場合(例えば、制御対象が制動部である場合と変速部である場合)にプログラムを異なる種類に分類しても良い。
【0020】
さらに、複数の要素は精度情報を選択する際の指標となれば良く、並列関係にある複数の要素を定義するとともに実行対象プログラムに応じて並列関係にある複数の要素のいずれかを選択する構成としても良い。この構成によれば、実行対象プログラムに応じて、並列関係にある複数の要素のいずれかを選択すればよいため、多数の要素から実行対象プログラムに応じた適切な要素を容易に選択することが可能になる。
【0021】
さらに、並列関係にある複数の要素のそれぞれに細分化された複数のサブ要素を対応づけても良い。この構成においては、実行対象プログラムに応じて並列関係にある複数の要素から特定の要素を選択し、さらに、当該選択された要素に対応づけられたサブ要素から、実行対象プログラムで利用される情報の特定法に応じたサブ要素を選択する。すなわち、実行対象プログラムで利用される情報を特定するために複数の情報の演算処理が必要になる場合があるが、この類の演算が複雑な演算であるほど演算誤差が増大し、演算を行うことなく直接的に利用可能な情報であれば演算誤差は存在しない。
【0022】
従って、実行対象プログラムで利用される情報の特定法が異なれば、精度を低下させる要因として考慮すべき要素も異なる。そこで、並列関係にある複数の要素をサブ要素に分類し、当該サブ要素を実行対象プログラムで利用される情報の特定法に応じた要素で構成すれば、実行対象プログラムで利用される情報を算出する際の特定法に応じてサブ要素を選択することができる。また、選択されたサブ要素が示す精度情報に基づいて的確に信頼度を特定することが可能になる。
【0023】
さらに、本発明によって特定された信頼度は種々の態様で利用可能である。例えば、特定された信頼度に応じて実行対象プログラムの処理内容を決定する構成を採用しても良い。すなわち、実行対象プログラムで利用される情報が誤っている場合には、当該情報を利用して走行支援を行うと誤制御となるなど、走行支援が適切に実行されない可能性がある。しかし、信頼度に応じて処理内容を決定することができれば、実行対象プログラムで利用される情報が誤っている場合に生じる悪影響を許容範囲内に抑制しつつ走行支援を行うことができる。
【0024】
なお、信頼度に応じて実行対象プログラムの処理内容を決定する場合には、実行対象プログラムによって実現可能な少なくとも1以上の機能を実現するか否か、実現する場合にはどの機能を実現するのかを特定し、実現するための処理内容を決定すればよい。この結果、プログラムで利用される情報の信頼度が低い場合に、その情報が正しいとみなして走行支援を行うことによる悪影響が発生することを抑制することができればよい。
【0025】
さらに、信頼度は実行対象プログラムで利用される情報の正確さを示す指標であれば良く、走行支援を行う際に複数の情報を利用する場合にそれぞれの情報についての信頼度を特定しても良いし、それぞれの情報についての信頼度を総合的に判定する構成としても良い。後者の構成としては、各情報の重要度に応じて信頼度を重み付けする構成を採用可能である。例えば、実行対象プログラムで利用される情報のそれぞれについて信頼度を特定する。そして、実行対象プログラムで利用される情報の重要度に応じて信頼度のそれぞれを重み付け加算した加算結果に基づいて、複数の走行支援処理から実行対象の処理を決定する構成としても良い。
【0026】
すなわち、走行支援を行う際に複数の情報を利用する場合、その情報の重要度は異なることが多い。例えば、カーブ区間における制動制御において、目標車速を決める際に利用される曲率半径が誤っていると制御目的の達成確率が低下するが、制動開始タイミングを決める際に利用されるカーブ区間の開始位置が誤っていても制動制御の過程で減速量が多少変動する程度であって制御目的の達成確率に与える影響は小さい。従って、ある情報が誤っていることが走行支援に与える影響と他の情報が誤っていることが走行支援に与える影響とは異なる場合が多い。
【0027】
また、実行対象プログラムで利用される情報の重要度に応じて信頼度を重み付けすれば、重み付け加算によって得られる加算結果は当該重要度を反映した和となる。そこで、重み付け加算の加算結果と処理内容とを対応づけておけば、特定された信頼度に応じて実行対象プログラムの処理内容を決定する構成において、実行対象プログラムで利用される情報の重要度に応じて実行対象プログラムによる処理内容を決定することができる。
【0028】
さらに、実行対象プログラムによる処理内容を決定するための構成例として、信頼度が高いほど実行対象プログラムに対して実行する機能の個数を多くする構成としても良い。すなわち、プログラムで利用される情報の信頼度が高い場合には、低い場合と比較して正確に走行支援を行うことができる。従って、どのような種類の走行支援を想定したとしても、プログラムで利用される情報の信頼度が高いほど、誤った支援を行う確率は低くなる。そこで、実行対象プログラムによって複数個の走行支援に対応した複数個の機能が実行可能である構成において、信頼度に応じて実行許可する機能の個数を多くすることにより、誤った走行支援がなされる確率が小さい場合にはより多様な走行支援を行う構成とすることが可能である。なお、機能の個数は各種の数え方が可能であるが、例えば、走行支援の目的毎に一個の機能と数える構成等を採用可能である。
【0029】
さらに、本発明のように信頼度を特定するための精度情報を実行対象プログラムの種類に対応した要素に基づいて選択する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0030】
【図1】信頼度特定装置を含むナビゲーション装置のブロック図である。
【図2】走行支援内容決定処理を示すフローチャートである。
【図3】カーブ区間の例を示す図である。
【図4】(4A)は停止線が存在する道路の例を示す図であり、(4B)は経路案内対象の道路の例を示す図である。
【発明を実施するための形態】
【0031】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(1−1)精度情報:
(1−2)走行支援内容決定処理:
(2)実施例:
(2−1)カーブ区間における減速制御:
(2−2)停止線到達前における減速制御:
(2−3)前方の交差点に関する案内:
(3)他の実施形態:
【0032】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる信頼度特定装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムとして信頼度特定プログラム21および各種のプログラムを実行可能である。信頼度特定プログラム21はナビゲーション装置10の記録媒体30に記録された走行支援を行うための各種のプログラムから実行対象プログラムを特定するとともにその処理で利用される情報の信頼度を特定する機能を備えている。図1においては、実行対象プログラムとして特定されて、制御部20によって実行対象プログラムが実際に実行されている状態を実行対象プログラム22として示している。また、本実施形態において、プログラムは車両の走行支援を行うための処理を実行するプログラムであり、センサによって特定される車両の位置を示す情報や地図情報30aの信頼度に対応する各種の処理を実行する機能を備えている。
【0033】
なお、地図情報30aは、車両の位置の特定や車両の経路案内に利用される情報であり、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(道路上の白線や横断歩道など)を示すデータ等を含んでいる。また、ノードデータには、隣接ノード間の道路上の車線数を示す情報が含まれている。本実施形態において、地図情報30aは区画(メッシュ)毎に定義されている。なお、地図情報30aは地図情報の管理者によって情報センターで管理される。すなわち、管理者は、計測者が計測した地物を示す情報、未計測の区画については頒布された地図(出典と呼ぶ)が示す情報に基づいて地図情報30aを作成して情報センターの記録媒体に蓄積する。さらに、ナビゲーション装置10が製造された時点での最新の地図情報が地図情報30aとして記録媒体30に記録される。また、利用者所望のタイミングで可搬記録媒体や通信によって地図情報30aを更新することができる。
【0034】
本実施形態における車両(ナビゲーション装置10が搭載された車両)は、GPS受信部41と車速センサ42とジャイロセンサ43とカメラ44と変速部45と制動部46とユーザーI/F部47とを備えている。これらの各部と制御部20とが協働することによって信頼度特定プログラム21による機能や各種のプログラムによる機能を実現する。
【0035】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の速度を取得する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。
【0036】
カメラ44は、車両の後方の道路を視野に含むように車両に対して取り付けられており、撮影した画像を示す画像データを出力する。制御部20は、図示しないインタフェースを介してこの画像データを取得して画像変換し、道路上の地物を検出して当該地物と車両との相対的な距離を特定する。
【0037】
変速部45は、前進について計6速、後進について計1速等の複数の変速段を有する有段のトルクコンバータを備えており、各変速段に対応した変速比で回転数を調整しながらエンジンの駆動力を車両の車輪に伝達することができる。制御部20は図示しないインタフェースを介して変速段を切り替えるための制御信号を出力し、変速部45は当該制御信号を取得して変速段を切り替えることが可能である。本実施形態においては、前進1速〜前進6速のように変速段がハイギアになるにつれて変速比が小さくなるように構成されている。
【0038】
制動部46は、車両の車輪に搭載されたブレーキによる減速の程度を調整するホイールシリンダの圧力を制御する装置を含み、制御部20は当該制動部46に対して制御信号を出力してホイールシリンダの圧力を調整させることが可能である。従って、制御部20が当該制動部46に対して制御信号を出力してホイールシリンダの圧力を増加させると、ブレーキによる制動力が増加し、車両が減速される。
【0039】
ユーザーI/F部47は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。制御部20は、ユーザI/F部47に対して制御信号を出力することによって各種の案内を出力させる。
【0040】
制御部20は、信頼度特定プログラム21を実行することにより、実行対象プログラムで利用される情報の信頼度を特定する。このために、信頼度特定プログラム21は、実行対象プログラム特定部21aと要素選択部21bと信頼度特定部21cを備えている。また、実行対象プログラム22は処理内容決定部22aを備えている。さらに、記録媒体30には予め精度情報30bおよびプログラム情報30cが記録されている。
【0041】
(1−1)精度情報:
精度情報30bは、プログラムで利用される情報の精度を複数の要素毎に示す情報であり、本実施形態においては、プログラムで利用される情報の精度を低下させる要因に対応するように精度を分類して要素としている。また、本実施形態においては、複数の要素に階層を対応付け、複数の要素によって階層構造を構成しており、最下位階層の要素に対して精度情報が対応付けられる。精度情報は、プログラムで利用される情報の正確さを示す情報であればよく、数値の誤差を示す値であっても良いし、正確さを示す指標(例えば、複数段階で正確さを示す情報)であっても良い。
【0042】
表1は、精度情報30bの一例を示す表であり、左側に上位の階層が位置するように配置してプログラムで利用される情報に対応付けられる要素を示すとともに最下位階層の各要素に対応付けられる精度情報の特定単位を示している。すなわち、本実施形態においては、同表1に示すように車両の位置を示す情報と地図情報とによってプログラムで利用される情報を構成している。また、本実施形態において、車両の位置を示す情報は、車両の周囲の地物と車両との相対関係によって特定される情報であり、各種のセンサの測定値に基づいて特定される。具体的には、道路上の構造物や横断歩道などの地物から車両までの距離を示す情報と、車両が走行している走行車線を示す情報と、マッチング処理で特定される道路を示す情報とが、車両の位置を示す情報である。そこで、精度情報30bにおいては、「地物から車両までの距離の精度」と、「車両が走行している走行車線の特定精度」と、「マッチング処理で特定される道路の特定精度」とを精度情報の要素とし、各要素に対して精度情報を対応付けている。
【0043】
また、地図情報は上述の地図情報30aが示す各種の情報であり、地図情報の更新頻度と地図情報の誤差が精度情報30bとなるが、本実施形態においては、要素を階層化することによってより細分化している。すなわち、地図情報の更新頻度は地図情報に対応付けられた要素であるとともに当該要素がさらに細分化され、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」とが精度情報の細分化された要素となっている。そして、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との各要素に対して精度情報を対応付けている。さらに、地図情報の誤差は「平均誤差」と「最大誤差」とに細分化され、さらに「平均誤差」と「最大誤差」とのそれぞれは「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「演算誤差」と「情報表現形式による誤差」とに細分化され、細分化された各要素に対して精度情報を対応付けている。
【表1】

【0044】
なお、本実施形態においては、要素が階層化されているため、ある要素の下位階層に相当する要素を当該ある要素のサブ要素とも呼ぶ。また、本実施形態における精度情報30bにおいては、車両の位置を示す情報の精度を示す精度情報が地物に対応付けて定義されている。例えば、「地物から車両までの距離の精度」を示す精度情報は、精度を示す対象となる地物に対応付けて定義され、「車両が走行している走行車線の特定精度」および「マッチング処理で特定される道路の特定精度」を示す精度情報は精度を示す対象となる道路に対応付けて定義されている。さらに、本実施形態における精度情報30bにおいては、地図情報の精度を示す精度情報が区画に対応付けて定義されている。すなわち、地図情報30aは区画毎に定義されているため、精度情報30bにおいても当該地図情報30aにおける区画に合わせて当該区画毎に精度情報が定義される。以上のように、精度情報30bは地図情報30aに対応付けて定義されている。
【0045】
表1においては、各精度情報の特定単位を示しており、1/mはメートルを単位とした誤差の逆数で精度情報が定義され、%は確率によって精度情報が定義され、候補道路数は車両から所定距離以内に存在するマッチング候補となる道路の個数によって精度情報が定義されることを示している。また、mはメートルを単位とした誤差で精度情報が定義され、日は日を単位とした情報の更新頻度によって精度情報が定義されることを示している。
【0046】
具体的には、「地物から車両までの距離の精度」に対応する精度情報は、GPS受信部41と車速センサ42とジャイロセンサ43とによる車両の位置の誤差(m)と、カメラ44による地物認識距離の誤差(m)との和の逆数を示す情報である。すなわち、地物から車両までの距離の誤差は、地物の位置の誤差と車両の位置の誤差との双方を含むため、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の位置を特定する場合の誤差を予め特定する。また、カメラ44にて撮像された画像に基づいて地物の位置を特定する場合の誤差を予め特定する。そして、双方の誤差の和の逆数を特定し、「地物から車両までの距離の精度」の精度情報とする。
【0047】
「車両が走行している走行車線の特定精度」に対応する精度情報は、走行車線が正しく特定される確率を示す情報である。すなわち、ある道路上で1以上の車線が存在する場合、車両の周囲の車線と車両との相対関係に基づいて車両が走行している走行車線を確定、あるいは特定の車線を走行している確率を特定することができる。例えば、道路の端に存在する車線の境界線が実線であり、車線間の境界線が破線である場合、車両の両側に存在する境界線の双方が実線である場合や、境界線の一方が実線で他方が破線である場合には走行車線を確定することができる。また、車両の両側に存在する境界線の双方が破線である場合、その道路の車線数が3である場合には中央の車線を走行していることが確定し、車線数が4以上である場合には走行車線の候補が2以上になり、特定の車線を走行している確率が特定されるのみである。
【0048】
例えば、車両の両側に存在する境界線の双方が破線あり、かつ、車線数が4である場合、中央に位置する2本の車線のいずれかを走行していることになる。また、車両の両側に存在する境界線が実線、破線のいずれであるのかは、カメラ44にて撮像された画像に基づいて特定される。そこで、本実施形態においては、車両が走行している可能性のある車線候補の数の逆数とカメラ44による車線の境界線の認識率とを乗じた値が「車両が走行している走行車線の特定精度」に対応する精度情報であるとし、道路上の車線に対応付けて精度情報30bとする。例えば、車両が走行している走行車線が左端あるいは右端である場合には、走行車線の特定精度は車線候補の数の逆数(1)×認識率(Aとする)でAとなり、4車線の道路において車両が走行している走行車線が中央に位置する2本のいずれかである場合には、走行車線の特定精度は車線候補の数の逆数(1/2)×認識率(A)でA/2となる。
【0049】
「マッチング処理で特定される道路の特定精度」に対応する精度情報は、車両の走行軌跡と道路の形状との一致度合いに基づいて車両が走行している道路を特定するマッチング処理の正確さを示す情報である。本実施形態においては、車両の周囲にマッチング候補が存在する数が多いほどマッチング精度が低くなるとみなしている。そこで、車両の位置から所定距離以内にマッチング候補となる候補道路が存在する場合に当該候補道路の数を「マッチング処理で特定される道路の特定精度」の精度情報とする。
【0050】
「情報の収集頻度」に対応する精度情報は、ナビゲーション装置10の地図情報30aを管理する管理者が地図情報の計測を行う頻度(例えば、計測者が計測を行う頻度)を示す情報である。すなわち、1回の計測が行われるまでの平均期間を日数で特定し、「情報の収集頻度」の精度情報とする。
【0051】
「情報センターにおける情報の修正頻度」に対応する精度情報は、地図情報を所定の記録媒体に蓄積する情報センターにおいて、新たに収集された地図情報によって記録媒体に記録された既存の地図情報を修正する作業を行う頻度を示す情報である。すなわち、1回の修正が行われるまでの平均期間を日数で特定し、「情報センターにおける情報の修正頻度」の精度情報とする。
【0052】
「車両における情報の修正頻度」に対応する精度情報は、新たに収集された地図情報によって記録媒体30に記録された既存の地図情報30aを車両において修正する作業を行う頻度を示す情報である。すなわち、車両においては可搬記録媒体や通信によって記録媒体30に記録された地図情報30aを修正可能であり、過去の修正作業の履歴を蓄積している。そこで、1回の修正が行われるまでの平均期間を日数で特定し、「車両における情報の修正頻度」の精度情報とする。
【0053】
さらに、精度情報30bにおいては、地図情報30aが示す地物の位置や長さ等の値の誤差を「平均誤差」と「最大誤差」とに分けて定義している。「平均誤差」は上述の区画内における誤差の平均値であり、「最大誤差」は上述の区画内における誤差の最大値である。「現地計測時の誤差」に対応する精度情報は、上述の計測者によって作成された地図情報30aに関する誤差であり、計測者が地物の位置や長さ等を測定したときの測定値と、基準となる測地系での当該地物の位置や長さとのずれを示す情報である。すなわち、当該ずれを区画内の「平均誤差」と「最大誤差」とのそれぞれについて計算し、それぞれを「現地計測時の誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0054】
「出典情報の誤差」に対応する精度情報は、上述の出典が示す情報に基づいて作成された地図情報30aに関する誤差を示す情報であり、出典が示す情報について出典の提供者が明示している「平均誤差」と「最大誤差」のそれぞれを特定し、それぞれを「出典情報の誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0055】
「情報入力時の誤差」に対応する精度情報は、地図情報30aが示す地物の情報の定義付けを行う際の入力誤差を示す情報である。すなわち、地図情報30aにおいては、地物の予め決められた部位を基準にして位置や長さを定義する。例えば、道路上の停止線の中央や端部など特定の部位を基準とし、当該基準についての位置や基準からみた長さ等を定義する。従って、計測者による計測結果等と地物の位置を対応付ける際に、予め決められた基準の位置を誤ってしまうと地物の位置が正確な位置を示していないことになる。そこで、予めこのような誤差について「平均誤差」と「最大誤差」のそれぞれを特定し、それぞれを「出典情報の誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0056】
「演算誤差」に対応する精度情報は、地図情報30aに基づいて演算処理を行う際に生じる誤差を示す情報である。例えば、道路上に設定された形状補間点の位置から曲率半径を算出する際に、当該演算に起因して誤差が生じる。そこで、本実施形態においては、各種の演算を行った場合に発生する誤差を予め特定し、上述の区画内における「平均誤差」と「最大誤差」のそれぞれを特定する。そして、それぞれの誤差を演算による各情報の特定法毎(例えば、四則演算の実行回数)に対応付けて「演算誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0057】
「情報表現形式による誤差」に対応する精度情報は、地図情報30aが示す地物の位置や長さの桁数に依存する誤差を示す情報である。すなわち、本実施形態においては、人口密集地域と過疎地域など、地域によって地図情報30aの情報量が異なるように構成しており、地図情報30aの桁数が区画毎に異なっている。そこで、予め区画毎に桁数が異なることによって生じる「平均誤差」と「最大誤差」のそれぞれを特定し、それぞれを「情報表現形式による誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0058】
以上のような精度情報30bにおいて、各要素に対応する精度情報は互いに独立になることを主眼にして各要素が分類されている。例えば、現地計測時の誤差と出典情報の誤差の一方が変動することによって他方が変動することはない。従って、精度情報30bを修正する際には、要素毎に情報を修正するのみで充分であり、また、複数の要素の精度情報30bを総合的に考慮して信頼度を特定する際に、最小限の数の要素を考慮することによって信頼度を特定することが可能になる。
【0059】
(1−2)走行支援内容決定処理:
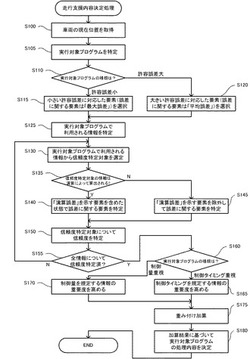
次に、信頼度特定プログラム21および実行対象プログラム22の処理内容決定部22aによる走行支援内容決定処理を説明する。信頼度特定プログラム21は、所定の期間(例えば、100ms)毎に実行される。図2は信頼度特定プログラム21が実行する走行支援内容決定処理を示すフローチャートである。
【0060】
実行対象プログラム特定部21aは、実行対象となる実行対象プログラムを特定する機能を制御部20に実現させるモジュールである。走行支援内容決定処理において、まず制御部20は、実行対象プログラム特定部21aの処理により、車両の現在位置を取得し(ステップS100)、実行対象プログラムを特定する(ステップS105)。
【0061】
すなわち、制御部20は、ステップS100において、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号および地図情報30aに基づいて車両の現在位置を特定する。さらに、制御部20は、ステップS105において、地図情報30aに基づいて当該車両の現在位置から所定の範囲に存在する道路の状態(道路形状等)を示す情報を取得し、車両の状態(車速センサ42等に基づいて特定される車速等)を示す情報を取得する。そして、制御部20は、当該道路の状態と車両の状態において実行すべきプログラムを実行対象プログラムとして特定する。なお、当該道路の状態および車両の状態と、実行対象プログラムとの対応を示す情報はプログラム情報30cとして記録媒体30に記録されている。また、本実施形態においては、複数のプログラムから実行対象プログラムを選択する構成としているが、プログラムが1個の場合に、ステップS105において、当該プログラムを実行すべき所定の条件が生じているか否か(例えば、マップマッチング処理によって車両の現在位置が道路に適合しているか否か)を判定し、実行すべき条件である場合にそのプログラムを実行対象プログラムとする構成としても良い。
【0062】
要素選択部21bは、実行対象プログラムの種類に対応する要素を複数の要素から選択する機能を制御部20に実現させるモジュールである。すなわち、プログラムを特定すれば、その処理によってプログラムで利用される情報が確定する。また、当該プログラムで利用される情報の精度を特定するために参照すべき要素は予め特定可能である。そこで、本実施形態においては、共通の要素の精度情報が利用されるプログラムが同じ種類となるようにプログラムを予め分類してある。具体的には、本実施形態において、実行対象プログラムの種類は、当該プログラムで利用される情報の許容誤差に基づいて分類されている。そこで、制御部20は、要素選択部21bの処理により、実行対象プログラムの種類が、当該実行対象プログラムで利用される情報の許容誤差が小さい種類であるのか、当該情報の許容誤差が大きい種類であるのかを判定する(ステップS110)。
【0063】
ステップS110において、実行対象プログラムの種類が、利用する情報の許容誤差が小さい種類であると判定された場合、制御部20は、精度情報30bを参照し、小さい許容誤差に対応した要素を選択する(ステップS115)。一方、実行対象プログラムの種類が、利用する情報の許容誤差が大きい種類であると判定された場合、制御部20は、精度情報30bを参照し、大きい許容誤差に対応した要素を選択する(ステップS120)。本実施形態において、精度情報30bの地図情報の誤差に関する要素は「最大誤差」と「平均誤差」とに分類されているが、実行対象プログラムで利用される情報の許容誤差が小さい場合には地図情報の誤差に関する要素として「最大誤差」が選択され(ステップS115)、情報の許容誤差が大きい場合には地図情報の誤差に関する要素として「最大誤差」が選択される(ステップS120)ように構成されている。
【0064】
すなわち、プログラムで利用される情報が許容誤差を超えるほどの不正確な情報である場合、当該走行支援が適切に実行されない可能性がある。また、プログラムで利用される情報の許容誤差が小さいような走行支援は、走行支援が不適切である場合の悪影響が大きい。例えば、カーブ区間(一定曲率区間の前後にクロソイド区間が形成されている道路)における制動制御と変速制御を想定する。ここで、制動制御は、一定曲率区間において車両に作用する横加速度が所定値(例えば0.4G)となった状態において一定車速で走行することを目的としてクロソイド区間の開始位置から制動部46によるブレーキによって制動を開始する制御である。変速制御は、一定曲率区間において車両に作用する横加速度が所定値(例えば0.2G)となった状態において一定車速で走行することを目的としてクロソイド区間の開始位置に到達する時点から所定期間だけ前の時点(例えば、クロソイド区間の開始位置に到達する2秒前)から変速比を変更することでエンジンブレーキを発生させる制御である。これらの制動制御と変速制御とを比較すると、制動制御における一定曲率区間での横加速度は変速制御における一定曲率区間での横加速度よりも大きく、前者の方が後者よりも横すべりが発生する限界横加速度との差分が小さい。従って、制動制御の方が、制御を実行する際の緊急性が高く、誤制御が生じた場合の違和感が大きく、誤制御が生じた場合の悪影響が大きい。さらに、変速制御においては、変速比の変更によるエンジンブレーキによって減速を補助する構成であり、運転者がブレーキによる制動を実行可能であることを鑑みると特定の変速比において車両に作用する減速度の任意性は高い。従って、制動制御における一定曲率区間の開始位置や道路の曲率半径に関する許容誤差は小さく、変速制御における一定曲率区間の開始位置や道路の曲率半径に関する許容誤差は大きくなる。
【0065】
また、地図情報の誤差における「最大誤差」は誤差があると仮定した場合の最大値であるため、「最大誤差」が許容誤差を超えなければ誤制御は発生しない。しかし、変速制御のように制動部46によるブレーキと組み合わせることによって制御量である減速度が大きく変動し得る走行支援(すなわち、目的とする制御量に正確に合わせることが重要ではない走行支援)で「最大誤差」が許容誤差を超えない条件を設定することは過度に厳しい条件となる。そこで、実行対象プログラムで利用される情報の許容誤差が小さい場合には誤差に関する要素として「最大誤差」を選択し、実行対象プログラムで利用される情報の許容誤差が大きい場合には誤差に関する要素として「平均誤差」を選択する。なお、許容誤差の大小によるプログラムの種類の分類は、誤制御がなされた場合の悪影響の程度に応じて予め決められていればよい。また、ステップS115,S120において制御部20は、誤差に関する要素について「最大誤差」と「平均誤差」とのいずれかを選択しておりそのサブ要素は選択しておらず最下位の要素が確定していないが、当該サブ要素は後の処理によって選択される。すなわち、「最大誤差」と「平均誤差」とは並列関係にある要素であり、いずれか一方が選択された後、後述する処理によってその下位階層のサブ要素が選択される。一方、地図情報の更新頻度についてはステップS115,S120において実行対象プログラムの種類に対応した最下位の要素を選択する。
【0066】
信頼度特定部21cは、選択された要素の精度情報に基づいて、実行対象プログラムで利用される情報の信頼度を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、信頼度特定部21cの処理により、実行対象プログラムで利用される情報を特定(ステップS125)し、特定された情報についてステップS130〜S155にて信頼度を特定する。なお、本実施形態において、車両の位置を示す情報の信頼度を特定するための要素は、車両の位置を示す情報に直接的に対応しているため、ステップS125において、制御部20は、走行支援を行う際に利用される車両の位置を示す情報の精度を示す要素を選択する。また、走行支援を行う際に利用される車両の位置を示す情報が複数である場合、制御部20は、走行支援を行う際に利用される複数の車両の位置を示す情報を特定し、複数の車両の位置を示す情報のそれぞれについて精度を示す要素を選択する。
【0067】
具体的には、制御部20は、ステップS125において、実行対象プログラムの処理によって行われる走行支援を特定し、当該走行支援を行うために参照すべき情報を、実行対象プログラムで利用される情報として特定する。例えば、地物からの距離に基づいて車両制御を行うような走行支援であれば、車両の位置を示す情報として地物からの距離を示す情報を利用することを特定する。そして、制御部20は、当該地物からの距離を示す情報の精度を示す要素を、信頼度を特定するための要素として選択する。
【0068】
次に、制御部20は、信頼度特定部21cの処理により、実行対象プログラムで利用される情報から信頼度特定対象を選定する(ステップS130)。すなわち、ステップS130〜S155にてループ処理によって信頼度を特定するため、実行対象プログラムで利用される情報が一個の場合にはその情報を信頼度特定対象として選定し、実行対象プログラムで利用される情報が複数個の場合にはその情報の中でステップS130〜S155のループ処理で信頼度が特定されていない情報を信頼度特定対象として選定する。
【0069】
次に、制御部20は、参照する精度情報を特定するため、要素選択部21bの処理により、信頼度特定対象の情報が演算によって算出されるか否かを判定し(ステップS135)、信頼度特定対象の情報が演算によって算出されると判定された場合、制御部20は、要素選択部21bの処理により、誤差に関する要素に演算誤差を示す要素を含めた状態として誤差に関する要素を特定する(ステップS140)。一方、ステップS135において信頼度特定対象の情報が演算によって算出されると判定されない場合、制御部20は、要素選択部21bの処理により、誤差に関する要素から演算誤差を示す要素を除外して誤差に関する要素を特定する(ステップS145)。
【0070】
すなわち、上述のステップS115,S120においては「最大誤差」あるいは「平均誤差」のいずれかの要素が選択されているが、そのサブ要素は選択されていないため、ステップS140,S145にてサブ要素を選択する。具体的には、上述の表1に示すように精度情報30bにおいて、「最大誤差」および「平均誤差」の要素は、「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「演算誤差」と「情報表現形式による誤差」とのそれぞれに細分化されている。また、実行対象プログラムで利用される情報が演算によって特定されず地図情報30a等から直接特定される場合には、当該情報は演算誤差の影響を受けない。そこで、実行対象プログラムで利用される情報が演算によって特定される場合、制御部20は、「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「演算誤差」と「情報表現形式による誤差」との全てを選択する。一方、実行対象プログラムで利用される情報が演算によって特定されない場合、制御部20は、「演算誤差」を除外し、「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「情報表現形式による誤差」とを選択する。
【0071】
次に、制御部20は、信頼度特定部21cの処理により、信頼度特定対象についての信頼度を特定する(ステップS150)。本実施形態においては、精度情報30bが示す要素が階層構造になっているため、各階層において考慮すべき精度情報を予め決められた基準に従って評価してより上位の階層の精度を総合評価する作業を繰り返すことによって各要素の総合評価を行って信頼度を特定する構成としている。
【0072】
より具体的には、精度情報30bが示す「地物から車両までの距離の精度」と、「車両が走行している走行車線の特定精度」と、「マッチング処理で特定される道路の特定精度」との各要素については、これらの要素が最下位階層の要素である。本実施形態においては、ステップS125において、実行対象プログラムで利用される情報が特定され、当該情報に応じた要素が選択されているため、ステップS150では、選択された要素の精度情報と閾値とを比較して当該選択された要素について複数段階の評価値を特定し、その組み合わせから車両の位置を示す情報の精度を総合評価するための評価値を特定する。
【0073】
表2は、当該評価値の例を示している。
【表2】
同表2においては、左側に要素毎の評価値、右側に各要素の評価値の組み合わせから特定される車両の位置を示す情報の精度を総合評価するための評価値を示している。
【0074】
この例において、「地物から車両までの距離の精度」については表1に示す精度情報である誤差の逆数と閾値とを比較することによって0〜3の4段階で評価値が特定され、「車両が走行している走行車線の特定精度」については表1に示す精度情報である確率と閾値とを比較することによって0〜3の4段階で評価値が特定される。「マッチング処理で特定される道路の特定精度」については表1に示す精度情報である候補道路数と閾値とを比較することによって0〜2の3段階で評価値が特定される。なお、ここでは、候補道路数が1個より少ない(すなわち車両がマッチングしていない)場合に評価値を0とし、候補道路数が2個以上である場合に評価値を1とし、候補道路数が1個である場合に評価値を2としている。
【0075】
さらに、表2においては、「マッチング処理で特定される道路の特定精度」の評価値が0,1の場合に車両の位置を示す情報の精度を総合評価するための評価値が0,1となるように設定してある。また、「マッチング処理で特定される道路の特定精度」の評価値が2の場合に「地物から車両までの距離の精度」や「車両が走行している走行車線の特定精度」を考慮して、車両の位置を示す情報の精度を総合評価するための評価値が2〜5となるように設定してある。従って、候補道路数が1個であるような、「マッチング処理で特定される道路の特定精度」が極めて正確な場合に限り他の要素(「地物から車両までの距離の精度」や「車両が走行している走行車線の特定精度」)を加味して車両の位置を示す情報の精度を総合評価するための評価値が2以上の値になるように設定していることになる。
【0076】
また、精度情報30bが示す「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との各要素については、これらの要素が最下位層であるため、ステップS150においては、各要素の精度情報を総合評価して上位階層の要素である「地図情報の更新頻度」の評価値を特定する。本実施形態においては、地図情報が新しいと見なせる状態を評価値1、地図情報が古いと見なせる状態を評価値0としている。具体的には、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との中で最少の日数が最も早い地図情報30aの更新頻度である。そこで、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との中で最少の日数をD1,利用者が可搬記録媒体や通信によって地図情報30aを更新した最近の日からの経過日数をD0とする。そして、1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0077】
一方、精度情報30bが示す「平均誤差」と「最大誤差」の要素については、ステップS115,S120の処理によりいずれかの要素のみが選択されるため、選択された要素についてのみ評価値を特定する。すなわち、「平均誤差」あるいは「最大誤差」のいずれかについて、そのサブ要素であってステップS140,S145のいずれかで選択されたサブ要素について、ステップS150にてその精度情報を特定する。そして、各サブ要素の精度情報に基づいて上位階層である「平均誤差」あるいは「最大誤差」いずれかの評価値を地図情報の誤差に関する総合評価として特定する。
【0078】
具体的には、「現地計測時の誤差」の精度情報をE1、「出典情報の誤差」の精度情報をE2、「情報入力時の誤差」の精度情報をE3、「演算誤差」の精度情報をE4、「情報表現形式による誤差」の精度情報をE5とした場合、ステップS140が実行された場合は1/(E1+E2+E3+E4+E5)と4段階の閾値とを比較することによって「地図情報の誤差」に関する総合評価を示す5段階の評価値(評価値0〜4)を特定する。一方、ステップS145が実行された場合は1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」に関する総合評価を示す5段階の評価値(評価値0〜4)を特定する。
【0079】
以上の処理によって同じ階層の要素である「地図情報の更新頻度」と「地図情報の誤差」とのそれぞれについての総合評価を示す評価値が特定されると、地図情報の精度を総合評価するための評価値を特定する。
【0080】
表3は、地図情報の精度を総合評価するための評価値の例を示している。
【表3】
同表3においては、左側に「地図情報の更新頻度」と「地図情報の誤差」とに関する要素毎の評価値を示し、右側に地図情報の精度を総合評価するための評価値を示している。
【0081】
この例において、「地図情報の更新頻度」については上述のように評価値が0あるいは1で特定されており、「地図情報の誤差」については上述のように評価値が0〜4のいずれかに特定されている。表3においては、「地図情報の更新頻度」の評価値が0の場合に地図情報の精度を総合評価するための評価値が0となるように設定してある。また、「地図情報の更新頻度」の評価値が1の場合に地図情報の精度を総合評価するための評価値が1〜5となるように設定してある。従って、地図情報が新しいと見なせる状態である場合に限り「地図情報の誤差」を加味して地図情報の精度を総合評価するための評価値が1以上の値になるように設定していることになる。
【0082】
以上のようにして、車両の位置を示す情報の精度を総合評価するための評価値(表2)と地図情報の精度を総合評価するための評価値(表3)とが特定されると、制御部20はこれらの評価値の組み合わせから、信頼度特定対象となっている情報の信頼度を特定する。すなわち、各評価値の組み合わせと信頼度との対応関係は予め規定されており、制御部20は、当該対応関係に基づいて信頼度を特定する。なお、表4は当該対応関係の例を示す表である。
【表4】
【0083】
以上のようにしてステップS150において信頼度特定対象についての信頼度を特定すると、制御部20は、信頼度特定部21cの処理により、実行対象プログラムで利用される情報の全てについて信頼度を特定済であるか否かを判定し(ステップS155)、実行対象プログラムで利用される情報の全てについて信頼度を特定済であると判定されない場合にはステップS130以降の処理を繰り返す。
【0084】
実行対象プログラム22の処理内容決定部22aは、信頼度に応じて実行対象プログラムの処理内容を決定する機能を制御部20に実現させるモジュールである。すなわち、ステップS155にて、実行対象プログラムで利用される情報の全てについて信頼度を特定済であると判定された場合、制御部20は、処理内容決定部22aの処理により、ステップS160〜S180にて実行対象プログラムの処理内容を決定する。
【0085】
具体的には、制御部20は、実行対象プログラム22の種類が、制御タイミングを重視すべき種類のプログラムであるのか、制御量を重視すべき種類のプログラムであるのかを判定する(ステップS160)。ステップS160において、実行対象プログラム22の種類が、制御タイミングを重視すべき種類のプログラムであると判定された場合、制御部20は、車両の制御を行う場合の制御タイミングを規定する情報の重要度を高める(ステップS165)。ステップS160において、実行対象プログラム22の種類が、制御量を重視すべき種類のプログラムであると判定された場合、制御部20は、車両の制御を行う場合の制御量を規定する情報の重要度を高める(ステップS170)。そして、制御部20は、重要度に応じて信頼度を重み付け加算し(ステップS175)、加算結果に基づいて実行対象プログラム22の処理内容を決定する(ステップS180)。
【0086】
すなわち、信頼度は実行対象プログラム22で利用される情報のそれぞれについて特定されるため、走行支援を行う際に利用される各情報の信頼度を考慮するが、走行支援毎に実行対象プログラム22で利用される情報の重要度は異なるため、本実施形態においては、当該情報の重要度に応じて信頼度を重み付けして総合評価する構成としている。
【0087】
より具体的には、本実施形態におけるプログラムは、走行支援の目的を達成するために重視すべき要素によっても予め分類されている。例えば、上述の制動制御を行うプログラムは一定曲率区間の曲率半径に基づいて目標車速を決定して車両を制動させる走行支援を行うプログラムである。この種のプログラムにおいては、制御目的に対応する制御量である車両における目標車速を決定する際に利用される曲率半径が誤っていると制御目的の達成確率が低下する。一方、クロソイド区間の開始位置が誤っており、制動開始タイミングに誤差が生じたとしても、車両に作用させる減速度が多少変動するのみで制御目的の達成確率に影響はない。従って、この種のプログラムにおいては制御量が正しくなるように制御を行うことが重要である。このため、制御量を規定する情報(例えば、一定曲率区間を一定車速で走行させる際に、当該一定車速を特定するために参照される情報)の重要度は高く、当該情報の信頼度の重みは大きくなる。
【0088】
一方、変速制御を行うプログラムはクロソイド区間の開始位置に基づいて変速タイミングを決定して変速制御を行うことによって車両において目標の減速度を発生させることが可能な変速比となるように、当該クロソイド区間の開始位置以前に変速が完了するように走行支援を行うプログラムである。この種のプログラムにおいては、変速比を決定する際に利用される減速度に誤差が含まれることにより、決定した変速比が誤りであったとしても、ブレーキ等によって制動を補助することが可能であるとともに、そもそも変速比を変更するのみで所望の減速度となるように制御することは不可能である。しかし、変速開始タイミングを決める際に利用されるクロソイド区間の開始位置が誤っており、クロソイド区間の開始位置以降において変速比が変速されると車両の挙動が乱れる。従って、この種のプログラムにおいては、クロソイド区間の開始位置に到達する前に正しく変速されているように制御タイミングを決定して変速制御を行うことが重要である。このため、制御タイミングを規定する情報(例えば、特定の地点を通過するタイミングで変速制御を行う際に、特定の地点を特定するために参照される情報)の重要度は高く、当該情報の信頼度の重みは大きくなる。
【0089】
以上のように、本実施形態においては、信頼度の重みを調整して重み付け加算した加算結果に基づいて実行対象プログラム22の処理内容を決定している。従って、実行対象プログラムで利用される情報の重要度に応じて信頼度を評価した結果に基づいて実行対象プログラムの処理内容を決定することができる。
【0090】
なお、信頼度を重み付け加算した結果に基づいて実行対象プログラム22の処理内容を決定するための構成としては、種々の構成を採用可能である。例えば、実行対象プログラム22によって複数の走行支援に相当する複数の機能を実行可能に構成し、信頼度の重み付け加算結果が大きい(高い信頼度に相当)ほど、多数個の機能(多数個の走行支援)の実行を許可する構成を採用可能である。より具体的には、制動制御を行うプログラムにより、制御部20が制動部46に対して制御信号を出力して制動を行う機能と、制御部20がユーザーI/F部47に対して制御信号を出力して制動を促すための案内を行う機能とを実現させる構成を想定する。この構成において、信頼度の重み付け加算結果が大きい場合には上述の2個の機能、すなわち、制動部46による制動とユーザーI/F47による案内の実行を許可し、信頼度の重み付け加算結果が小さい場合には上述の2個の中から選択された1個の機能(例えば、ユーザーI/F47による案内)の実行を許可する構成とする。変速部47による変速とユーザーI/F47による案内を実行させる、変速制御を行うプログラムにおいても同様に、信頼度の重み付け加算結果が大きい場合に2個の機能のうちの2個の実行を許可し、信頼度の重み付け加算結果が大きい場合に2個の機能のうちの1個の実行を許可する構成等を採用可能である。この構成によれば、誤った走行支援がなされる確率が小さい場合にはより多様な走行支援を行う構成とすることが可能である。むろん、実行対象プログラムで利用される情報のそれぞれについての信頼度を重み付け加算する処理は、実行対象プログラム22によって実現する構成の他、信頼度特定部21cによって実現する構成など、種々の構成を採用可能である。
【0091】
また、精度情報30bは、プログラムの種類に依存せず、各プログラムで共通の情報群として定義されている。従って、各プログラムで共通の情報群に基づいて信頼度を特定することが可能になり、走行支援毎に精度情報を定義する構成と比較して精度情報30bの容量を抑制することができる。また、精度情報30bにおいては、プログラムで利用される情報の精度を複数の要素毎に定義しているため、要素を選択することによって参照すべき精度情報を特定することが可能になる。さらに、実行対象プログラムの種類に対応する要素を特定することによって信頼度を特定するために参照すべき精度情報を特定することができるため、参照すべき精度情報を容易に特定することができる。また、信頼度を特定するために参照する必要がない精度情報を参照することなく必要十分な処理によって信頼度を特定することができる。以上のように、本発明によれば、多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択することが可能になる。
【0092】
さらに、信頼度に応じて処理内容を決定することができれば、誤制御を防止し、誤制御が発生した場合の影響を予め把握した上で走行支援を行うか否か、あるいはその内容を決定することができる。従って、プログラムで利用される情報が誤っている場合に生じる悪影響を許容範囲内に抑制しつつ走行支援を行うことができる。
【0093】
(2)実施例:
(2−1)カーブ区間における減速制御:
次に、カーブ区間における減速制御を例にして、以上の構成における実施例を説明する。図3は、車両Cの前方に存在するクロソイド区間および一定曲率区間を含むカーブ区間の例を示す図であり、同図3においては、一定曲率区間の前後に設けられたクロソイド区間を破線で示す矢印L0,L1、一定曲率区間を一点鎖線で示す矢印L2で示している。また、図3においては、一定曲率区間に到達する以前のクロソイド区間の開始位置をP0、一定曲率区間の開始位置P1として示している。
【0094】
本例において、走行支援として減速支援と変速支援を行う構成を想定する。すなわち、図1に示す構成において、制動制御を行うプログラムと変速制御を行うプログラムとが予め実行可能に構成され、図2のステップS105でこれらのプログラムが実行対象プログラムとして特定された状態を想定する。
【0095】
この構成において、制動制御を行うプログラムは、一定曲率区間の開始位置P1以降において一定曲率区間を一定の車速Vで走行するように制動制御を行うことを目的としている。具体的には、一定の車速Vは一定曲率区間における横加速度Gおよび一定曲率区間の曲率半径Rに基づいてV=(G・R)1/2として特定され、制御部20は、当該プログラムの処理により、クロソイド区間の開始位置P0から車両の減速を開始させ、一定曲率区間の開始位置P1において特定の横加速度Gで一定の車速Vで走行させるための制御を行う。
【0096】
さらに、制動制御を行うプログラムは、車速を制御するプログラムであって誤制御による影響が大きいためプログラムで利用される情報の許容誤差が小さい種類のプログラムである。また、上述のように、制動制御を行うプログラムは制御量を重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとを示す情報とによって構成される。
【0097】
従って、制動制御を行うプログラムが実行対象プログラムである場合、図2に示すステップS110において、実行対象プログラムは許容誤差が小さい種類のプログラムであると判定される。このため、ステップS115にて考慮すべき誤差に関する要素として「最大誤差」が選択される。また、ステップS125において、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとを示す情報が、実行対象プログラムで利用される情報として特定される。
【0098】
なお、ステップS115においては、精度情報の要素として地図情報の誤差に関する要素と地図情報の更新頻度に関する要素が選択され、ステップS125において車両の位置を示す情報に関する要素が選択される。すなわち、ステップS115,S125により、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとについての精度情報の要素として、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」が選択される。
【0099】
さらに、ステップS130〜S155のループ処理においては、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとのそれぞれを信頼度特定対象として信頼度を特定する処理が行われる。ここで、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1とは地図情報30aのノード情報から直接特定されるため、ステップS135において演算によって算出されると判定されず、ステップS145にて「演算誤差」を示す要素を除外して誤差に関する要素が特定される。すなわち、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」が誤差に関する要素として特定される。
【0100】
ステップS150においては、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」および「最大誤差」に対応する「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」に基づいて信頼度が特定される。すなわち、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の現在位置を特定し、地図情報30aに基づいて車両が現在走行している道路が図3のように車線数1の道路であることを特定する。そして、制御部20は精度情報30bを参照し、当該車線数1の道路に関する「車両が走行している走行車線の特定精度」の精度情報を特定し、「車両が走行している走行車線の特定精度」の評価値を0〜3のいずれかに特定する。
【0101】
また、制御部20は、地図情報30aを参照して車両が現在走行している道路(すなわちマッチング処理で特定された道路)の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。
【0102】
さらに、制御部20は、地図情報30aを参照して車両の現在位置が存在する区画を特定し、精度情報30bを参照して当該区画における「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」の精度情報を特定し、最少の日数D1を特定する。さらに、制御部20は、利用者が可搬記録媒体や通信によって地図情報30aを更新した日からの経過日数D0を特定する。そして、制御部20は1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0103】
さらに、制御部20は、精度情報30bを参照して「最大誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」を総合評価するための評価値を0〜4のいずれかに特定する。
【0104】
さらに、制御部20は、以上のようにして特定された「地図情報の更新頻度」を総合評価するための評価値と「地図情報の誤差」を総合評価するための評価値と表3に基づいて「地図情報の精度」を総合評価するための評価値を特定する。さらに、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値と「地図情報の精度」を総合評価するための評価値と表4に基づいて、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1の信頼度を特定する。
【0105】
一方、曲率半径Rは、地図情報30aの形状補間点を示す情報から隣接する3カ所の形状補間点を通る円が特定され、当該円の半径を曲率半径Rとみなすことによって特定される。従って、ステップS135において演算によって算出されると判定され、ステップS140にて、3点から円の半径を算出する際の特定法に対応付けられた「演算誤差」と、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」とが誤差に関する要素として特定される。
【0106】
このため、曲率半径Rの信頼度を特定するために実行されるステップS150においては、誤差に関する要素に「演算誤差」が含まれている点が上述のクロソイド区間の開始位置P0と一定曲率区間の開始位置P1の信頼度を特定するために実行されるステップS150と異なっている。すなわち、曲率半径Rの信頼度を特定するために実行されるステップS150において、制御部20は、精度情報30bを参照して「最大誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「演算誤差」の精度情報E4、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E4+E5)と4段階の閾値とを比較することによって「地図情報の誤差」に関する総合評価を示す5段階の評価値を0〜4のいずれかに特定する。他の演算に関してはクロソイド区間の開始位置P0と一定曲率区間の開始位置P1の信頼度を特定するために実行されるステップS150と同様である。
【0107】
以上のようにしてクロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとのそれぞれについて信頼度が特定されると、制御部20は、ステップS160において、実行対象プログラムの種類を判定する。そして、制御部20は、制動制御を行うプログラムが、制御量を重視すべき種類のプログラムであると判定してステップS170を実行する。制動制御を行うプログラムにおいては、上述のように、一定曲率区間の曲率半径Rに基づいて一定の車速V=(G・R)1/2を特定するため、当該一定の車速Vが制御目的に対応する制動制御の制御量を規定するパラメータとなる。一方、制動制御を行うプログラムは、クロソイド区間の開始位置P0から車両の減速を開始させ、一定曲率区間の開始位置P1において特定の横加速度Gで一定の車速Vで走行させる。従って、クロソイド区間の開始位置P0および一定曲率区間の開始位置P1は制御タイミングを規定するパラメータとなる。
【0108】
そこで、制御部20は、ステップS170において曲率半径Rの重要度を、クロソイド区間の開始位置P0および一定曲率区間の開始位置P1よりも高く設定してステップS175にて重み付け加算を行う。そして、ステップS180においては、加算結果に基づいて実行対象プログラムの処理内容を決定する。本例においては、信頼度が所定の閾値を超える場合に制動制御を実行し、信頼度が所定の閾値よりも小さい場合には制動制御を実行しない構成となっている。従って、誤制御を発生させないように実行対象プログラムの処理内容を決定することが可能である。
【0109】
一方、変速制御を行うプログラムは、クロソイド区間の開始位置P0以降において所定の減速度を発生させるために必要な変速比となるように変速制御を行い、減速開始前に準備しておくことを目的としている。この構成において、制動制御を行うプログラムは、クロソイド区間の開始位置P0以降に減速を開始して一定曲率区間の開始位置P1以降において一定曲率区間を一定の車速Vで走行するため減速度を特定し、当該減速度を発生させるために必要な変速比を特定する。そして、車両がクロソイド区間の開始位置P0に到達した時点で変速制御を開始する。
【0110】
さらに、制動制御を行うプログラムは、車速を制御するプログラムであって変速比の変更タイミングが多少前後に変動した場合に車両に与える影響は小さいため、プログラムで利用される情報の許容誤差が大きい種類のプログラムである。また、上述のように、変速制御を行うプログラムは制御タイミングを重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとを示す情報とによって構成され、変速タイミングを規定するクロソイド区間の開始位置P0の重要度は一定曲率区間の開始位置P1と曲率半径Rとよりも高い。
【0111】
従って、変速制御を行うプログラムが実行対象プログラムである場合、図2に示すステップS110を経てステップS120にて考慮すべき誤差に関する要素として「平均誤差」が選択される。また、ステップS125〜S155のループ処理においては、誤差に関する要素が「平均誤差」である以外は制動制御を行うプログラムにおける処理と同様である。
【0112】
クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとのそれぞれについて信頼度が特定されると、ステップS160において、実行対象プログラムの種類が制御タイミングを重視すべき種類のプログラムであると判定される。このため、制御タイミングを規定するパラメータであるクロソイド区間の開始位置P0の重要度を、一定曲率区間の開始位置P1および曲率半径Rよりも高く設定してステップS175にて重み付け加算を行う。そして、ステップS180において、加算結果に基づいて実行対象プログラムである変速制御を実行するか否かを決定する。
【0113】
(2−2)停止線到達前における減速制御:
次に、停止線到達前における減速制御における実施例を説明する。図4Aは、車両Cの前方に交差点への進入前に車両Cを一時停止させるための停止線Sが存在する1車線の道路を示している。また、図4Aにおいては車両Cが走行している道路において車両Cの後方に横断歩道Pが存在する例を示している。
【0114】
本例において、走行支援として減速支援を行う構成を想定する。すなわち、図1に示す構成において、減速制御を行うプログラムが予め実行可能に構成され、図2のステップS105で当該減速制御を行うプログラムが実行対象プログラムとして特定された状態を想定する。
【0115】
この構成において、減速制御を行うプログラムの処理により、制御部20は、地図情報30aを参照して横断歩道Pの位置および停止線Sの位置に基づいて両者の間の距離L4を取得する。また、制御部20は、カメラ44の出力に基づいて横断歩道Pを検出し、当該横断歩道Pを検出した時点における横断歩道Pと車両Cとの距離およびカメラ44にて横断歩道Pを検出した時点以降の車両Cの走行距離に基づいて横断歩道Pから車両Cまでの距離L3を検出する。
【0116】
そして、距離L4−距離L3が所定距離以下になった時点から減速を開始し、当該時点から停止線Sに到達するまでの過程で減速制御を行う。すなわち、当該停止線Sに到達するまでの過程で車両の現在車速を0にするための制御を行う。
【0117】
本例においても減速制御を行うプログラムは上述の実施例と同様にプログラムで利用される情報の許容誤差が小さい種類のプログラムであり、制御量を重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、地図情報30aが示す横断歩道Pの位置および停止線Sの位置および横断歩道Pから車両Cまでの距離L3である。
【0118】
本例においては、車両Cが1車線の道路を走行している状態において前方の所定範囲に横断歩道Pが存在する場合に、減速制御を行うプログラムが実行対象プログラムとなる。また、図2に示すステップS110を経てステップS115にて考慮すべき誤差に関する要素として「最大誤差」が選択される。また、ステップS115においては、精度情報の要素として誤差に関する要素と地図情報の更新頻度に関する要素が選択され、ステップS125において車両の位置を示す情報に関する要素が選択される。すなわち、ステップS115,S125により、横断歩道Pの位置および停止線Sの位置の精度を示す要素として、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」,「最大誤差」が選択される。また、横断歩道Pから車両Cまでの距離L3を示す情報は地図情報30aを参照することなく特定される情報であるため、横断歩道Pから車両Cまでの距離L3を示す情報の精度を示す要素として、「地物から車両までの距離の精度」,「マッチング処理で特定される道路の特定精度」が選択される。
【0119】
さらに、横断歩道Pの位置、停止線Sの位置を示す情報は、演算によって特定される情報でないため、ステップS135の判定を経て制御部20は、「演算誤差」を示す要素を除外した状態で誤差に関する要素を特定する。すなわち、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」が誤差に関する要素として特定される。なお、横断歩道Pから車両Cまでの距離L3も演算によって特定される情報ではないが、横断歩道Pから車両Cまでの距離L3を特定するために地図情報30aは参照されないため、横断歩道Pから車両Cまでの距離L3に関してはステップS150〜S145が省略される。以上のように、横断歩道Pの位置、停止線Sの位置および横断歩道Pから車両Cまでの距離L3について要素が選択されると、制御部20は、ステップS150において信頼度を特定する。
【0120】
すなわち、横断歩道Pの位置、停止線Sの位置を示す情報について、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の現在位置を特定し、地図情報30aに基づいて車両が現在走行している道路の車線数が1であることを特定する。そして、制御部20は精度情報30bを参照し、当該車線数1の道路に関する「車両が走行している走行車線の特定精度」の精度情報を特定し、「車両が走行している走行車線の特定精度」の評価値を0〜3のいずれかに特定する。
【0121】
また、制御部20は、地図情報30aを参照して車両が現在走行している道路の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。
【0122】
さらに、制御部20は、地図情報30aを参照して横断歩道Pおよび停止線Sが走行している道路が存在する区画を特定し、精度情報30bを参照して当該区画における「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」の精度情報を特定し、最少の日数D1を特定する。さらに、制御部20は、利用者が可搬記録媒体や通信によって地図情報30aを更新した日からの経過日数D0を特定する。そして、制御部20は1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0123】
さらに、制御部20は、精度情報30bを参照して「最大誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」を総合評価するための評価値を0〜4のいずれかに特定する。
【0124】
さらに、制御部20は、以上のようにして特定された「地図情報の更新頻度」を総合評価するための評価値と「地図情報の誤差」を総合評価するための評価値と表3に基づいて「地図情報の精度」を総合評価するための評価値を特定する。さらに、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値と「地図情報の精度」を総合評価するための評価値と表4に基づいて、横断歩道Pの位置、停止線Sの位置を示す情報の信頼度を特定する。
【0125】
さらに、横断歩道Pから車両Cまでの距離L3を示す情報についての精度情報の要素は「地物から車両までの距離の精度」,「マッチング処理で特定される道路の特定精度」であるため、制御部20は精度情報30bを参照し、車両Cにおける「地物から車両までの距離の精度」の精度情報を特定し、「地物から車両までの距離の精度」の評価値を0〜3のいずれかに特定する。また、制御部20は、地図情報30aを参照して車両が現在走行している道路の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。横断歩道Pから車両Cまでの距離L3を示す情報は、地図情報30aを参照して特定する情報ではないため、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値を横断歩道Pから車両Cまでの距離L3を示す情報の信頼度とする。
【0126】
さらに、本例において、実行対象プログラムで利用される情報は、横断歩道Pの位置および停止線Sの位置および横断歩道Pから車両Cまでの距離L3であるが、制御量を規定するために横断歩道Pの位置および停止線Sの位置および横断歩道Pから車両Cまでの距離L3を参照するため、ステップS160,S170において各情報の重みは等しい重みに設定される。この結果、ステップS180において、ステップS150で特定された信頼度を重み付け加算した加算結果に基づいて実行対象プログラムの処理内容を決定する。本例においては、信頼度が高い場合に減速制御を行い、信頼度が低い場合に前方に停止線が存在することを示す案内を行う。
【0127】
(2−3)前方の交差点に関する案内:
次に、前方の交差点に関する案内における実施例を説明する。図4Bは、片側2車線の道路を車両Cが走行している例を示している。本例において、走行支援として車両の前方の交差点における案内を行う構成を想定する。すなわち、図1に示す構成において、前方の交差点における案内を行うプログラムが予め実行可能に構成され、図2のステップS105で当該前方の交差点における案内を行うプログラムが実行対象プログラムとして特定された状態を想定する。
【0128】
この構成において、前方の交差点における案内を行うプログラムの処理により制御部20は、車両Cにおいて予め設定された経路を示す情報を取得し、車両Cの前方における経路に沿って車両Cを走行するための車線および交差点における進行方向を特定して案内する。
【0129】
本例において前方の交差点における案内を行うプログラムは交差点における経路を案内するが、交差点の位置などの際に応じて変動する制御量等を決定することはない。従って、プログラムで利用される情報の許容誤差が大きい種類のプログラムである。また、交差点に到達する以前に案内が行われていることが重要であるため、制御タイミングを重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、交差点を示す情報と車両の現在位置(走行車線と走行している道路)を示す情報である。
【0130】
本例においては、車両Cの前方の所定範囲内に交差点が存在する場合に、前方の交差点における案内を行うプログラムが実行対象プログラムとなる。また、前方の交差点における案内を行うプログラムは、プログラムで利用される情報の許容誤差が大きい種類のプログラムであるため、図2に示すステップS110を経てステップS120にて考慮すべき誤差に関する要素として「平均誤差」が選択される。また、ステップS120においては、精度情報の要素として地図情報の誤差に関する要素と地図情報の更新頻度に関する要素が選択され、ステップS125において車両の位置を示す情報に関する要素が選択される。すなわち、ステップS120,S125により、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」,「平均誤差」が選択される。
【0131】
さらに、交差点を示す情報と車両の現在位置を示す情報は、演算によって特定される情報でないため、ステップS135の判定を経て制御部20は、「演算誤差」を示す要素を除外した状態で誤差に関する要素を特定する。すなわち、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」が誤差に関する要素として特定される。
【0132】
制御部20は、ステップS150において、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」および「平均誤差」に対応する「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」に基づいて信頼度を特定する。
【0133】
すなわち、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の現在位置を特定し、地図情報30aに基づいて車両が現在走行している道路の車線数を特定する。そして、制御部20は精度情報30bを参照し、当該車線数の道路に関する「車両が走行している走行車線の特定精度」の精度情報を特定し、「車両が走行している走行車線の特定精度」の評価値を0〜3のいずれかに特定する。
【0134】
また、制御部20は、地図情報30aを参照して車両が現在走行している道路の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。
【0135】
さらに、制御部20は、地図情報30aを参照して車両の前方の交差点および車両が走行している道路が存在する区画を特定し、精度情報30bを参照して当該区画における「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」の精度情報を特定し、最少の日数D1を特定する。さらに、制御部20は、利用者が可搬記録媒体や通信によって地図情報30aを更新した日からの経過日数D0を特定する。そして、制御部20は1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0136】
さらに、制御部20は、精度情報30bを参照して「平均誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」を総合評価するための評価値を0〜4のいずれかに特定する。
【0137】
さらに、制御部20は、以上のようにして特定された「地図情報の更新頻度」を総合評価するための評価値と「地図情報の誤差」を総合評価するための評価値と表3に基づいて「地図情報の精度」を総合評価するための評価値を特定する。さらに、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値と「地図情報の精度」を総合評価するための評価値と表4に基づいて、交差点を示す情報と車両の現在位置を示す情報の信頼度を特定する。
【0138】
さらに、本例においては、交差点を示す情報と車両の現在位置を示す情報とのいずれも同等の重要度であるため、ステップS160〜S170は省略し、制御部20は、ステップS180において、交差点を示す情報と車両の現在位置を示す情報とのそれぞれの信頼度の和に基づいて実行対象プログラムの処理内容を決定する。本例においては、信頼度が高い場合に車線変更の案内および走行経路の案内を実行し、信頼度が低い場合に車線変更の案内は実行せず走行経路の案内を実行する。
【0139】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、信頼度を特定するための精度情報を実行対象プログラムの種類に対応した要素に基づいて選択する限りにおいて、他にも種々の実施形態を採用可能である。例えば、プログラムは車両内に存在する制御部によって実行されて車両の走行を支援する所定の機能を実現することができればよい。また、走行支援は車両を運転する運転者への支援であり、実行対象プログラムで利用される情報の精度によってその支援の品質が変動するものを対象とすればよい。従って、プログラムは上述の例以外にも、車両制御への介入、補助、警告、注意喚起等の案内など各種の走行支援を行う各種のプログラムを採用可能である。
【0140】
なお、上述の実施形態においては、プログラムで利用される情報の許容誤差と制御において重視すべき事項とに基づいて実行対象プログラムの種類を分類していたが、他にも種々の分類を採用することができる。例えば、各種の走行支援の中には誤った支援を行うことによる影響の程度によって、誤った支援を行うことが許容されない支援と仮に誤った支援を行ってもそれが許容される支援とが存在する。安全性向上のための制御において誤った支援を行うと安全性を低下させかねないが、利便性向上のための制御において誤った支援を行った場合、利便性が低下し得るものの安全性に影響はない。従って、安全性向上のための制御を行うプログラムと利便性向上のための制御を行うプログラムとを異なる種類に分類する構成としても良い。また、プログラムの処理による制御が行われる制御対象が異なる場合(例えば、制御対象が制御部である場合と変速部である場合)にプログラムを異なる種類に分類しても良い。
【0141】
さらに、走行支援を行う際に複数の情報を利用する場合にそれぞれの情報についての信頼度を特定して信頼度を総合的に判定する構成の他、それぞれの信頼度を個別に評価する構成としても良い。
【0142】
さらに、精度情報30bは、上述の構成以外にも種々の構成を採用可能である。例えば、上述の構成においては、「車両の位置を示す情報」の精度を示す要素として、プログラムで利用される情報の態様に直接的に対応した要素(例えば、地物から車両までの距離)を精度情報30bに含める構成としたが、「車両の位置を示す情報」の精度をセンサの精度によって表現する構成としても良い。例えば、GPS受信部と車速センサ42とジャイロセンサ43とによって車両の位置を特定する際の精度や加速度センサによって加速度を測定する際の精度を、「車両の位置を示す情報」の精度を示す要素に含める構成としても良い。
【0143】
さらに、地図情報30aに含まれる情報の不変性を、地図情報の精度を示す要素に含める構成としても良い。例えば、道路工事や道路の新設を行うことによって道路形状が変化する可能性や変化する頻度等を当該不変性を示す精度情報として精度情報30bに含める構成を採用可能である。
【0144】
表5は、精度情報30bの一例を示す表である。同表5においても左側に上位の階層が位置するように配置してプログラムで利用される情報に対応付けられる階層化された要素を示すとともに、最下位階層の各要素に対応付けられる精度情報の特定単位を示している。
【表5】
同表5においては、道路の不変性が地図情報の精度を示す要素を構成する場合における当該道路の不変性に関する精度情報30bの例を示している。すなわち、地図情報30aが示す道路に関する情報はある時点における道路の形状や道路の位置等を示す情報であるため、道路工事や道路の新設などによって地図情報30aが示す道路と実際の道路とが異なる状況が発生し得る。そこで、道路が変化する可能性を示す複数の指標を複数の要素として定義し、予め決められた道路区間毎に複数の要素毎の精度情報を定義して精度情報30bを構成する。なお、道路区間は、道路の不変性が共通となると推定される道路の集合を定義することができればよく、ノードを端点とした区間(リンク)によって道路区間を構成してもよいし、同じ名称の道路(例えば、東名高速道路等)によって道路区間を構成してもよいし、同じ名称の道路上における特定の施設(例えば、インターチェンジ等)間の道路によって道路区間を構成してもよく、種々の構成を採用可能である。むろん、上述の実施形態のように地図情報30aにおける区画毎に各道路区間の不変性を示す要素を定義しても良い。
【0145】
表5に示す例においては、「工事の頻度」と、「経年変化の程度」と、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」とが道路の不変性を示す要素とされている。また、「工事の頻度」は、「変更頻度」と、「追加頻度」と、「削除頻度」とに細分化される。また、「変更頻度」は、さらに「カーブ区間の形状の変更頻度」、「勾配区間の形状の変更頻度」、「車線種別の変更頻度」、「立体構造物種別の変更頻度」、「ペイント種別の変更頻度」に関する要素に細分化され、細分化された各要素に対して精度情報が対応付けられる。
【0146】
「追加頻度」は、さらに「カーブ区間の追加頻度」、「勾配区間の追加頻度」、「車線の追加頻度」、「立体構造物の追加頻度」、「ペイントの追加頻度」に関する要素に細分化され、細分化された各要素に対して精度情報が対応付けられる。「削除頻度」は、さらに「カーブ区間の削除頻度」、「勾配区間の削除頻度」、「車線の削除頻度」、「立体構造物の削除頻度」、「ペイントの削除頻度」に関する要素に細分化され、細分化された各要素に対して精度情報が対応付けられる。
【0147】
また、「経年変化の程度」は、「補修頻度」と、「交通量」とに細分化され、「補修頻度」は「ペイントの補修頻度」と、「路面凹凸の補修頻度」とに細分化される。「経年変化の程度」に関しては、「ペイントの補修頻度」と、「路面凹凸の補修頻度」と、「交通量」との各要素が最下位階層となっており、これらの各要素に対して精度情報が対応付けられる。さらに、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」とは、これらの要素が最下位階層の要素であり、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」との各要素に対して精度情報が対応付けられる。
【0148】
表5においても、右端の列にて各精度情報の特定単位を示しており、件/年は年間の発生件数によって精度情報が定義され、台/年は年間の走行車両数によって精度情報が定義されることを示している。なお、工事や補修の件数は、工事や補修が開始されてから終了するまでの作業を1件と数えることによって定義される。渋滞の件数は、単位時間あたりの車両の数が閾値を超えた後、再び閾値を下回った場合に渋滞が1件発生したと数えることによって定義される。
【0149】
具体的には、精度情報30bによって精度を示す対象となる道路区間が、単位距離あたりの曲率が所定の閾値以上となっているカーブ区間を含み、当該カーブ区間において工事によって曲率が変更される場合、その変更工事の年間の平均件数を示す情報が「カーブ区間の形状の変更頻度」に対応する精度情報となる。カーブ区間の道路が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「カーブ区間の追加頻度」に対応する精度情報となる。さらに、カーブ区間の道路が工事によって削除される場合には、その削除工事の年間の平均件数を示す情報が「カーブ区間の削除頻度」に対応する精度情報となる。
【0150】
また、精度情報30bによって精度を示す対象となる道路区間が、単位距離あたりの標高変化が所定の閾値以上となっている勾配区間を含み、当該勾配区間において工事によって勾配区間の形状が変更される場合、その変更工事の年間の平均件数を示す情報が「勾配区間の形状の変更頻度」に対応する精度情報となる。勾配区間の道路が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「勾配区間の追加頻度」に対応する精度情報となる。さらに、勾配区間の道路が工事によって削除される場合には、その削除工事の年間の平均件数を示す情報が「勾配区間の削除頻度」に対応する精度情報となる。
【0151】
さらに、精度情報30bによって精度を示す対象となる道路区間において、既存道路の車線種別を他の車線種別に変更する工事が行われる場合、その変更工事の年間の平均件数を示す情報が「車線種別の変更頻度」に対応する精度情報となる。車線が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「車線の追加頻度」に対応する精度情報となる。さらに、車線が工事によって削除される(車線数を減少させる)場合には、その削除工事の年間の平均件数を示す情報が「車線の削除頻度」に対応する精度情報となる。
【0152】
さらに、精度情報30bによって精度を示す対象となる道路区間において、当該道路区間上あるいは当該道路区間周辺の立体構造物(信号機や交通標識等)を他の種別に変更する(例えば、信号機の種類を変更する)工事が行われる場合、その変更工事の年間の平均件数を示す情報が「立体構造物種別の変更頻度」に対応する精度情報となる。立体構造物が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「立体構造物の追加頻度」に対応する精度情報となる。さらに、立体構造物が工事によって削除される(立体構造物数を減少させる)場合には、その削除工事の年間の平均件数を示す情報が「立体構造物の削除頻度」に対応する精度情報となる。
【0153】
さらに、精度情報30bによって精度を示す対象となる道路区間において、当該道路区間上のペイント(進行方向指示矢印や停止線等)を他の種別に変更する(例えば、進行方向規制の変更に伴って進行方向指示矢印の向きを変更する)工事が行われる場合、その変更工事の年間の平均件数を示す情報が「ペイント種別の変更頻度」に対応する精度情報となる。ペイントが工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「ペイントの追加頻度」に対応する精度情報となる。さらに、ペイントが工事によって削除される場合には、その削除工事の年間の平均件数を示す情報が「ペイントの削除頻度」に対応する精度情報となる。
【0154】
さらに、道路上のペイントが劣化し、また、路面の凹凸が増加すると補修されるため、精度情報30bによって精度を示す対象となる道路区間において当該道路区間上のペイントや路面の凹凸が補修される場合、その補修の年間の平均件数が大きいほど経年変化の程度が大きいといえる。そこで、本例においては、当該道路上のペイントに対する補修の年間の平均件数を示す情報を「ペイント種別の補修頻度」に対応する精度情報とし、路面の凹凸に対する補修の年間の平均件数を示す情報を「路面の凹凸の補修頻度」に対応する精度情報としている。
【0155】
さらに、道路を走行する車両の台数が多いほど単位時間あたりの道路の経年変化が激しくなるため、本例においては、精度情報30bによって精度を示す対象となる道路区間を通過する車両の年間の平均台数を示す情報を「交通量」に対応する精度情報としている。
【0156】
さらに、道路上で交通事故が発生する可能性が高い場合や、渋滞が発生する可能性が高い場合、道路周辺の住民等から頻繁に道路改善が要望される場合には、道路の形状を変更し、あるいは道路上で地物を変更、追加、削除するなど、道路に関する変更がなされる可能性が高くなる。そこで、本例においては、精度情報30bによって精度を示す対象となる道路区間上での年間における交通事故の平均発生件数を示す「交通事故の頻度」、年間における渋滞の平均発生件数を示す「渋滞の頻度」、年間において公的機関等が受け取る道路改善要望の平均件数を示す「道路改善要望の頻度」を精度情報としている。
【0157】
以上のような情報が精度情報30bに含まれる構成においては、実行対象プログラムに応じて要素を選択することにより、道路の不変性を反映した信頼度を取得することが可能である。すなわち、図1に示す構成と同様の構成において、精度情報30bに表5に示す情報を含む構成とし、制御部20にて図2と同様の処理を実行する。但し、実行対象プログラムで地図情報の不変性を考慮すべき場合には、ステップS125において表5に示す要素を実行対象プログラムに応じて選択し、表5に示す要素が選択された場合にはステップS150においてこれらの要素に対応した精度情報に基づいて信頼度を特定する。また、ステップS160〜S180においては、これらの要素に対応した重み付け加算を行って実行対象プログラムの処理内容を決定する。
【0158】
具体的には、制御部20は、実行対象プログラムの種類に応じて表5に示す要素を取捨選択する。例えば、実行対象プログラムが道路のペイントに関する情報を利用して処理を行う種類のプログラムである場合、ステップS125において制御部20は、実行対象プログラムが道路のペイントに関する情報を利用することを特定する。また、ペイントに関する情報の精度を示す要素として、表5に示す精度情報の中から「ペイント種別の変更頻度」と、「ペイントの追加頻度」と、「ペイントの削除頻度」と、「ペイントの補修頻度」と、「交通量」と、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」とを選択する。
【0159】
次に、制御部20はステップS130〜S155の処理を行うが、ペイントに関する情報の信頼度を特定する場合、制御部20はステップS150において、上述のステップS125で選択された要素の精度情報に基づいて道路の不変性に関する評価値を特定する。具体的には、制御部20が精度情報30bを参照し、「ペイント種別の変更頻度」の精度情報a(件/年)と、「ペイントの追加頻度」の精度情報b(件/年)と、「ペイントの削除頻度」の精度情報c(件/年)と、「ペイントの補修頻度」の精度情報d(件/年)と、「交通量」の精度情報e(台/年)と、「交通事故の頻度」の精度情報f(件/年)と、「渋滞の頻度」の精度情報g(件/年)と、「道路改善要望の頻度」の精度情報h(件/年)とを取得する。
【0160】
そして、(a+b+c)を「工事の頻度」に関する評価値、(e/d)を「経年変化の程度」に関する評価値、fを「交通事故の頻度」に関する評価値、gを「渋滞の頻度」に関する評価値、hを「道路改善要望の頻度」に関する評価値とする。さらに、((1/(a+b+c))+(1/(e/d))+(1/f)+(1/g)+(1/h))を「道路の不変性」に関する評価値とする。むろん、以上の評価値の演算において、各精度情報に所定の係数を乗じて加算する構成としても良いし、単位を調整(例えば、「交通量」を万台/年で評価する)しても良い。
【0161】
以上のように道路の不変性に関する評価値を特定すると、制御部20は、地図情報の誤差や更新頻度等に関する評価値を考慮してペイントに関する情報の信頼度を特定する。さらに、ステップS150〜S175においては、実行対象プログラムで利用する情報の重要度に応じて信頼度を重み付け加算して実行対象プログラムの処理内容を決定する。以上のように、精度情報30bに道路の不変性に関する要素毎の精度情報を含める構成とすれば、実行対象プログラムで利用される情報が道路に対する変更の影響を受ける場合であっても当該実行対象プログラムで利用される情報の信頼度を評価することが可能になる。
【0162】
むろん、信頼度の評価方法は種々の評価方法を採用可能であり、上述のように地図情報の誤差や更新頻度等に関する評価値を考慮して信頼度を総合評価しても良いし、道路の不変性に関する評価値を道路の不変性に関する信頼度とみなして実行対象プログラムにおける処理内容を決定しても良い。例えば、道路の不変性に関する評価値を3段階で評価し、道路が変化する可能性が最も高い評価値である場合に実行対象プログラムによる処理を中止し、次に道路が変化する可能性が高い評価値である場合に実行対象プログラムによって利用者に対する案内を行い、道路が変化する可能性が最も低い評価値である場合に実行対象プログラムによって車両の制御を実行する構成等を採用可能である。
【0163】
なお、上述の表5のような例は、他にも種々の態様に適用可能である。例えば、実行対象プログラムの目的に応じて利用される情報が異なる場合に、各情報に対応した要素を選択するように構成してもよい。より具体的な構成として、地図情報30aに道路上の凹凸の位置を示す情報を含める構成とし、制御部20において、地図情報30aを参照して当該凹凸の位置を特定し、当該凹凸に応じてサスペンションの制御を行う実行対象プログラムと、道路の曲率に応じてサスペンションや変速比の制御を行う実行対象プログラムとが実行可能である構成を想定する。また、この構成において「工事の頻度」と「経年変化の程度」とのいずれかまたは双方を考慮して信頼度を評価する構成を想定する。この構成において、道路上の凹凸に応じてサスペンションの制御を行う実行対象プログラムにおいては道路上の凹凸に影響を与え得る要素を選択する必要があるため、制御部20は、「工事の頻度」と「経年変化の程度」との双方の要素について精度情報を参照して信頼度を特定する。一方、道路の曲率に応じてサスペンションや変速比の制御を行う実行対象プログラムにおいては道路の曲率に影響を与え得る要素を選択すればよいため、制御部20は精度情報を参照すべき要素として「工事の頻度」を選択するが、「経年変化の程度」は選択しないことになる。この構成によれば、実行対象プログラムにて利用する情報の信頼度を適切に評価することが可能になる。
【0164】
さらに、プログラムで利用される情報の信頼度を特定するための精度情報は、他にも種々の情報によって定義することができる。例えば、ナビゲーション装置10が搭載された車両においてGPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいて車両の位置を測定し、カメラ44の出力信号に基づいて道路上の地物等の位置を測定する構成において、測定された車両の位置から特定される道路を示す情報や、測定された道路上の地物等の位置を示す情報を地図情報30aに追加する構成を想定する。
【0165】
この構成においては、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づく車両の位置の特定誤差が当該車両の位置の精度を示し、カメラ44の出力信号に基づく地物等の位置の特定誤差が当該地物等の位置の精度を示すとみなすことができる。従って、これらの誤差が、地図情報30aに追加された道路を示す情報や地物等の位置を示す情報の精度情報であるとみなすことが可能である。また、車両の走行頻度は車両の位置や地物等の位置の測定頻度に対応するため、当該測定頻度が、地図情報の更新頻度を示す精度情報であるとみなすことができる。
【0166】
そこで、精度情報30bにおいて、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づく車両の位置の特定誤差、カメラ44の出力信号に基づく地物等の位置の特定誤差、車両の走行頻度を精度情報に含めることとし、制御部20において実行対象プログラムに対応する要素を選択し、選択された要素の精度情報で信頼度を特定する構成とする。この構成によれば、車両の走行によって測定された道路情報や地物等の位置を示す情報の信頼度に応じて実行対象プログラムの処理内容を決定することが可能になる。また、本例においては、同じ道路に関する情報として予め地図情報30aに定義された情報と、車両の走行によって取得した情報とが併存し得るため、前者と後者の信頼度を比較し、信頼度が高い方を実行対象プログラムで利用する構成とすることも可能である。
【0167】
さらに、上述の実施形態においては、制御部20にて実行対象プログラムで利用される情報の信頼度を特定し、制御部20にて特定された信頼度と実行対象プログラムで利用される情報とを利用して当該実行対象プログラムを実行していたが、他の構成を採用しても良い。例えば、制御部20によって信頼度を特定し、特定された信頼度を示す情報を実行対象プログラムで利用される情報に対応付けて他の制御部に提供することによって当該他の制御部によって信頼度に基づく制御を実行するように構成してもよい。
【0168】
すなわち、実行対象プログラムは当該他の制御部によって実行される構成となっており、信頼度特定装置において特定された信頼度を実行対象プログラムで利用される情報に対応付けて当該他の制御部に提供することにより、当該他の制御部によって実行対象プログラムを実行する際に、信頼度に応じた制御を実行できるように構成する。この構成は、例えば、信頼度を特定する制御部20がナビゲーション装置10の制御部であり、他の制御部が車両に搭載されたブレーキ制御部である構成等によって実現可能である。
【符号の説明】
【0169】
10…ナビゲーション装置、20…制御部、21…信頼度特定プログラム、21a…実行対象プログラム特定部、21b…要素選択部、21c…信頼度特定部、22a…処理内容決定部、22…実行対象プログラム、30…記録媒体、30a…地図情報、30b…精度情報、30c…プログラム情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…カメラ、45…変速部、46…制動部、47…ユーザーI/F部
【技術分野】
【0001】
本発明は、情報の信頼度に応じて走行支援処理の処理内容を決定する走行支援で利用される情報の信頼度特定装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、走行支援を行う際に利用される情報の精度を定義する技術として各種の技術が知られている。例えば、特許文献1には、地図情報のバージョンに応じて信頼度を特定する技術や、マップマッチング履歴から求められる車両の走行履歴経路と地図情報から特定される経路とのずれに基づいて信頼度を特定する技術が開示されている。また、当該特許文献1には信頼度に基づいて車速制御やバッテリ回生制御、車線逸脱防止制御等の走行支援を行う技術が開示されている。
特許文献2には、地図情報の位置精度、地図情報の最新の調査時からの建物等の経年変化、建物等について地図情報が示す情報と実際との一致率に対応した情報精度、に基づいて地図情報の信頼度を特定する技術が開示されている。また、当該特許文献2には信頼度に基づいて停止制御、速度制限通知等の走行支援を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−147713号公報
【特許文献2】特開2007−225498号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、走行支援のそれぞれに対応した信頼度の特定法や精度情報の定義が開示されている。しかし、車両において行われる走行支援は制動補助や経路案内、注意喚起など多岐にわたっており、信頼度を特定するために参照する精度情報も車両の走行履歴の精度や地図情報の位置精度など多岐にわたっている。また、近年の車両においては、ナビゲーションシステム等によって一台の車両において多岐にわたる走行支援のそれぞれを実行可能に構成する。
【0005】
このように多岐にわたる走行支援を想定した場合、各走行支援を行う際に利用される情報の信頼度を特定するために参照すべき精度情報は、その一部あるいは全部が重複する場合が多い。従って、重複する精度情報を重複して保持すると極めて効率が悪い。さらに、精度情報が多岐にわたるため、多数の精度情報の中から走行支援のそれぞれに応じて信頼度を特定する際に参照すべき精度情報を的確に選択しなければならない。
本発明は、上記課題にかんがみてなされたもので、多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供を目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明においては、プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に定義して記録媒体に記録する。また、実行対象プログラムに対応する要素を複数の要素から選択し、選択された要素の精度情報に基づいて、実行対象プログラムの処理によって実行対象プログラムで利用される情報の信頼度を特定する。すなわち、精度情報は複数の要素毎に定義され、実行対象プログラムによって要素が選択されることによって信頼度を特定するために参照すべき要素が特定され、当該要素によって参照すべき精度情報が特定されるように構成した。
【0007】
この構成によれば、プログラム毎に精度情報を定義することなく、各プログラムで共通の情報群として定義された精度情報に基づいて信頼度を特定することが可能になり、精度情報の容量を抑制することができる。また、プログラムで利用される情報の精度を複数の要素毎に定義しているため、要素を選択することによって、参照すべき精度情報を特定することが可能になる。さらに、実行対象プログラムに対応する要素を特定することによって、信頼度を特定するために参照すべき精度情報を特定することができるため、参照すべき精度情報を容易に特定することができる。また、信頼度を特定するために参照する必要がない精度情報を参照することなく必要十分な処理によって信頼度を特定することができる。以上のように、本発明によれば、多様なプログラムで利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択することが可能になる。
【0008】
ここで、記録媒体に記録される精度情報は、プログラムで利用される情報の信頼度を特定するために利用され、当該プログラムで利用される情報の精度を複数の要素毎に示していればよい。すなわち、車両制御や注意喚起などの各種の走行支援を行う際には当該走行支援の内容に応じて車両の位置を示す情報や地図情報など、プログラムで利用される情報が特定されるが、これらのプログラムで利用される情報の全てを誤差なく規定することは現実的に不可能である。例えば、車両の位置は車両の位置を特定するセンサの精度に依存し、地図情報は地図情報作成作業の精度や新しい道路を的確に反映している度合いに依存する。そこで、本発明においては、プログラムで利用される情報の精度を精度情報として規定することとする。
【0009】
さらに、プログラムで利用される情報の精度は、種々の視点で定義することができるため、予め複数の要素を定義しておき、当該複数の要素のそれぞれについて精度を示す情報を定義して精度情報とする。すなわち、プログラムで利用される情報のそれぞれに対して複数の要素が対応づけられ、各要素について精度情報が定義される。精度情報は、プログラムで利用される情報の正確さを示す情報であり、数値の誤差を示す値であっても良いし、正確さを示す指標(例えば、複数段階で正確さを示す情報)であっても良い。
【0010】
複数の要素は、プログラムで利用される情報の精度を低下させる要因に対応した精度の分類であればよく、種々の視点で定義することができるが、各要素は独立であることが好ましい。すなわち、ある要素の精度が低下すると他の要素の精度も低下するなどの依存関係にないことが好ましい。この構成によれば、複数の要素の精度情報を総合的に考慮して信頼度を特定する際に、最小限の数の要素を考慮することによって信頼度を特定することが可能になる。また、精度情報を修正する際に、要素毎に情報を修正するのみで修正が完了するように構成することが可能である。
【0011】
プログラムは車両内に存在する制御部によって実行されて車両の走行を支援する所定の機能を実現することができればよい。走行支援は車両を運転する運転者への支援であり、プログラムで利用される情報の信頼度によってその支援の品質が変動するものを対象としている。従って、車両制御への介入、補助、警告、注意喚起等の案内など各種の走行支援を想定することができる。
【0012】
実行対象プログラム特定手段は、実行対象プログラムを特定することができればよい。すなわち、車両において実行すべき実行対象プログラムが車両の状況や車両の周囲の状況に応じて選択されれば良く、車両の状況や車両の周囲の状況に応じて特定のプログラムを実行するか否かを特定する構成や、複数のプログラムから実行対象を特定する構成等を採用可能である。
【0013】
要素選択手段は、実行対象プログラムの種類に対応する要素を選択することができればよい。すなわち、プログラムを特定すれば、その処理によって利用される情報が確定する。また、当該プログラムで利用される情報の精度を特定するために参照すべき要素は予め特定可能である。そこで、プログラムに対応する要素を選択する構成とすることで、プログラムで利用される情報の信頼度を特定するために参照すべき要素を的確に特定することが可能になる。なお、プログラムに対応する要素は、個別のプログラム毎に選択してもよいし、共通の要素の精度情報が利用されるプログラムが同じ種類となるように予めプログラムを分類し、当該プログラムの種類に対応する要素を選択する構成としても良い。
【0014】
信頼度特定手段は、選択された要素の精度情報に基づいて、プログラムで利用される情報の信頼度を特定することができればよい。すなわち、精度情報から、プログラムで利用される情報の正確さを示す信頼度を特定することができればよい。信頼度は、走行支援を行った場合に車両に与える悪影響が少ないほど高い信頼度であると定義されていればよい。例えば、プログラムで利用される情報が正確ではないが、正確であるとみなして車両の制御を行った場合に運転に与える影響の大きさ等によって信頼度を評価する構成等を採用可能である。
【0015】
さらに、プログラムで利用される情報が車両の位置を示す情報を含む構成において、精度情報が車両の周囲の地物と車両との相対関係によって特定される車両の位置を示す情報の精度を示す情報を含むように構成してもよい。この構成によれば、例えば、横断歩道や道路、道路上の白線など車両の周囲の地物を特定し、当該地物と車両との相対関係が特定の関係である場合に制動や注意喚起を行う走行支援を行う際に利用する車両の位置を示す情報の信頼度を特定することが可能になる。
【0016】
また、プログラムで利用される情報が地図情報を含む構成において、精度情報が地物に関する値を示す地図情報の誤差を示す情報と当該値の更新頻度を示す情報とを含むように構成してもよい。この構成によれば、例えば、道路上に設定されたノードや形状補間点の位置、道路の曲率半径などの地物に関する値に基づいて制動タイミングや制動量を特定する走行支援を行う際に利用する地図情報の信頼度を特定することが可能になる。さらに、地図情報が示す道路の不変性を示す情報を精度情報に含める構成としてもよい。この構成によれば、地図情報が示す道路が正確であるか否かを反映して実行対象プログラムで利用される情報の信頼度を評価することが可能になる。
【0017】
さらに、プログラムの種類は、当該種類によって参照すべき精度情報の要素が特定されるように定義されていれば良く、種々の構成を採用可能である。例えば、各プログラムで利用される情報の許容誤差に基づいて分類される構成としても良い。すなわち、各種の走行支援の中には誤った支援を行うことによる影響の程度によって、誤った支援を行うことが許容されない支援と仮に誤った支援を行ってもそれが許容される支援とが存在する。例えば、安全性向上のための制御において誤った支援を行うと安全性を低下させかねないが、利便性向上のための制御において誤った支援を行った場合、利便性が低下し得るものの安全性に影響はない。従って、前者においては誤った支援を行うことが許容されないが後者においては許容され、プログラムで利用される情報の許容誤差は前者のような走行支援の方が後者のような走行支援よりも小さい。
【0018】
また、前者のような走行支援を行う際には、精度情報から特定される信頼度に基づいて誤った支援を行わないようにプログラムによる処理内容を決定する必要がある。従って、プログラムで利用される情報の信頼度を特定するために参照すべき精度情報は、前者のような走行支援と後者のような走行支援とで異なり得る。そこで、プログラムで利用される情報の許容誤差に基づいてプログラムを複数の種類に分類すれば、プログラムの種類に対応する要素を複数の要素から選択する構成により、参照すべき精度情報を的確に選択することが可能になる。
【0019】
なお、プログラムの種類に基づいて要素を選択する構成は、上述のような許容誤差に基づいて種類を分類した構成の他にも各種の分類について適用可能である。例えば、プログラムの処理によって行われる走行支援が安全性向上を目的とした支援である場合と利便性向上を目的とした支援である場合とで異なる種類にプログラムを分類する際に、許容誤差だけでなく、他の指標に基づいて分類を行っても良い。また、プログラムの処理による制御が行われる制御対象が異なる場合(例えば、制御対象が制動部である場合と変速部である場合)にプログラムを異なる種類に分類しても良い。
【0020】
さらに、複数の要素は精度情報を選択する際の指標となれば良く、並列関係にある複数の要素を定義するとともに実行対象プログラムに応じて並列関係にある複数の要素のいずれかを選択する構成としても良い。この構成によれば、実行対象プログラムに応じて、並列関係にある複数の要素のいずれかを選択すればよいため、多数の要素から実行対象プログラムに応じた適切な要素を容易に選択することが可能になる。
【0021】
さらに、並列関係にある複数の要素のそれぞれに細分化された複数のサブ要素を対応づけても良い。この構成においては、実行対象プログラムに応じて並列関係にある複数の要素から特定の要素を選択し、さらに、当該選択された要素に対応づけられたサブ要素から、実行対象プログラムで利用される情報の特定法に応じたサブ要素を選択する。すなわち、実行対象プログラムで利用される情報を特定するために複数の情報の演算処理が必要になる場合があるが、この類の演算が複雑な演算であるほど演算誤差が増大し、演算を行うことなく直接的に利用可能な情報であれば演算誤差は存在しない。
【0022】
従って、実行対象プログラムで利用される情報の特定法が異なれば、精度を低下させる要因として考慮すべき要素も異なる。そこで、並列関係にある複数の要素をサブ要素に分類し、当該サブ要素を実行対象プログラムで利用される情報の特定法に応じた要素で構成すれば、実行対象プログラムで利用される情報を算出する際の特定法に応じてサブ要素を選択することができる。また、選択されたサブ要素が示す精度情報に基づいて的確に信頼度を特定することが可能になる。
【0023】
さらに、本発明によって特定された信頼度は種々の態様で利用可能である。例えば、特定された信頼度に応じて実行対象プログラムの処理内容を決定する構成を採用しても良い。すなわち、実行対象プログラムで利用される情報が誤っている場合には、当該情報を利用して走行支援を行うと誤制御となるなど、走行支援が適切に実行されない可能性がある。しかし、信頼度に応じて処理内容を決定することができれば、実行対象プログラムで利用される情報が誤っている場合に生じる悪影響を許容範囲内に抑制しつつ走行支援を行うことができる。
【0024】
なお、信頼度に応じて実行対象プログラムの処理内容を決定する場合には、実行対象プログラムによって実現可能な少なくとも1以上の機能を実現するか否か、実現する場合にはどの機能を実現するのかを特定し、実現するための処理内容を決定すればよい。この結果、プログラムで利用される情報の信頼度が低い場合に、その情報が正しいとみなして走行支援を行うことによる悪影響が発生することを抑制することができればよい。
【0025】
さらに、信頼度は実行対象プログラムで利用される情報の正確さを示す指標であれば良く、走行支援を行う際に複数の情報を利用する場合にそれぞれの情報についての信頼度を特定しても良いし、それぞれの情報についての信頼度を総合的に判定する構成としても良い。後者の構成としては、各情報の重要度に応じて信頼度を重み付けする構成を採用可能である。例えば、実行対象プログラムで利用される情報のそれぞれについて信頼度を特定する。そして、実行対象プログラムで利用される情報の重要度に応じて信頼度のそれぞれを重み付け加算した加算結果に基づいて、複数の走行支援処理から実行対象の処理を決定する構成としても良い。
【0026】
すなわち、走行支援を行う際に複数の情報を利用する場合、その情報の重要度は異なることが多い。例えば、カーブ区間における制動制御において、目標車速を決める際に利用される曲率半径が誤っていると制御目的の達成確率が低下するが、制動開始タイミングを決める際に利用されるカーブ区間の開始位置が誤っていても制動制御の過程で減速量が多少変動する程度であって制御目的の達成確率に与える影響は小さい。従って、ある情報が誤っていることが走行支援に与える影響と他の情報が誤っていることが走行支援に与える影響とは異なる場合が多い。
【0027】
また、実行対象プログラムで利用される情報の重要度に応じて信頼度を重み付けすれば、重み付け加算によって得られる加算結果は当該重要度を反映した和となる。そこで、重み付け加算の加算結果と処理内容とを対応づけておけば、特定された信頼度に応じて実行対象プログラムの処理内容を決定する構成において、実行対象プログラムで利用される情報の重要度に応じて実行対象プログラムによる処理内容を決定することができる。
【0028】
さらに、実行対象プログラムによる処理内容を決定するための構成例として、信頼度が高いほど実行対象プログラムに対して実行する機能の個数を多くする構成としても良い。すなわち、プログラムで利用される情報の信頼度が高い場合には、低い場合と比較して正確に走行支援を行うことができる。従って、どのような種類の走行支援を想定したとしても、プログラムで利用される情報の信頼度が高いほど、誤った支援を行う確率は低くなる。そこで、実行対象プログラムによって複数個の走行支援に対応した複数個の機能が実行可能である構成において、信頼度に応じて実行許可する機能の個数を多くすることにより、誤った走行支援がなされる確率が小さい場合にはより多様な走行支援を行う構成とすることが可能である。なお、機能の個数は各種の数え方が可能であるが、例えば、走行支援の目的毎に一個の機能と数える構成等を採用可能である。
【0029】
さらに、本発明のように信頼度を特定するための精度情報を実行対象プログラムの種類に対応した要素に基づいて選択する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0030】
【図1】信頼度特定装置を含むナビゲーション装置のブロック図である。
【図2】走行支援内容決定処理を示すフローチャートである。
【図3】カーブ区間の例を示す図である。
【図4】(4A)は停止線が存在する道路の例を示す図であり、(4B)は経路案内対象の道路の例を示す図である。
【発明を実施するための形態】
【0031】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(1−1)精度情報:
(1−2)走行支援内容決定処理:
(2)実施例:
(2−1)カーブ区間における減速制御:
(2−2)停止線到達前における減速制御:
(2−3)前方の交差点に関する案内:
(3)他の実施形態:
【0032】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる信頼度特定装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムとして信頼度特定プログラム21および各種のプログラムを実行可能である。信頼度特定プログラム21はナビゲーション装置10の記録媒体30に記録された走行支援を行うための各種のプログラムから実行対象プログラムを特定するとともにその処理で利用される情報の信頼度を特定する機能を備えている。図1においては、実行対象プログラムとして特定されて、制御部20によって実行対象プログラムが実際に実行されている状態を実行対象プログラム22として示している。また、本実施形態において、プログラムは車両の走行支援を行うための処理を実行するプログラムであり、センサによって特定される車両の位置を示す情報や地図情報30aの信頼度に対応する各種の処理を実行する機能を備えている。
【0033】
なお、地図情報30aは、車両の位置の特定や車両の経路案内に利用される情報であり、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(道路上の白線や横断歩道など)を示すデータ等を含んでいる。また、ノードデータには、隣接ノード間の道路上の車線数を示す情報が含まれている。本実施形態において、地図情報30aは区画(メッシュ)毎に定義されている。なお、地図情報30aは地図情報の管理者によって情報センターで管理される。すなわち、管理者は、計測者が計測した地物を示す情報、未計測の区画については頒布された地図(出典と呼ぶ)が示す情報に基づいて地図情報30aを作成して情報センターの記録媒体に蓄積する。さらに、ナビゲーション装置10が製造された時点での最新の地図情報が地図情報30aとして記録媒体30に記録される。また、利用者所望のタイミングで可搬記録媒体や通信によって地図情報30aを更新することができる。
【0034】
本実施形態における車両(ナビゲーション装置10が搭載された車両)は、GPS受信部41と車速センサ42とジャイロセンサ43とカメラ44と変速部45と制動部46とユーザーI/F部47とを備えている。これらの各部と制御部20とが協働することによって信頼度特定プログラム21による機能や各種のプログラムによる機能を実現する。
【0035】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の速度を取得する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。
【0036】
カメラ44は、車両の後方の道路を視野に含むように車両に対して取り付けられており、撮影した画像を示す画像データを出力する。制御部20は、図示しないインタフェースを介してこの画像データを取得して画像変換し、道路上の地物を検出して当該地物と車両との相対的な距離を特定する。
【0037】
変速部45は、前進について計6速、後進について計1速等の複数の変速段を有する有段のトルクコンバータを備えており、各変速段に対応した変速比で回転数を調整しながらエンジンの駆動力を車両の車輪に伝達することができる。制御部20は図示しないインタフェースを介して変速段を切り替えるための制御信号を出力し、変速部45は当該制御信号を取得して変速段を切り替えることが可能である。本実施形態においては、前進1速〜前進6速のように変速段がハイギアになるにつれて変速比が小さくなるように構成されている。
【0038】
制動部46は、車両の車輪に搭載されたブレーキによる減速の程度を調整するホイールシリンダの圧力を制御する装置を含み、制御部20は当該制動部46に対して制御信号を出力してホイールシリンダの圧力を調整させることが可能である。従って、制御部20が当該制動部46に対して制御信号を出力してホイールシリンダの圧力を増加させると、ブレーキによる制動力が増加し、車両が減速される。
【0039】
ユーザーI/F部47は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。制御部20は、ユーザI/F部47に対して制御信号を出力することによって各種の案内を出力させる。
【0040】
制御部20は、信頼度特定プログラム21を実行することにより、実行対象プログラムで利用される情報の信頼度を特定する。このために、信頼度特定プログラム21は、実行対象プログラム特定部21aと要素選択部21bと信頼度特定部21cを備えている。また、実行対象プログラム22は処理内容決定部22aを備えている。さらに、記録媒体30には予め精度情報30bおよびプログラム情報30cが記録されている。
【0041】
(1−1)精度情報:
精度情報30bは、プログラムで利用される情報の精度を複数の要素毎に示す情報であり、本実施形態においては、プログラムで利用される情報の精度を低下させる要因に対応するように精度を分類して要素としている。また、本実施形態においては、複数の要素に階層を対応付け、複数の要素によって階層構造を構成しており、最下位階層の要素に対して精度情報が対応付けられる。精度情報は、プログラムで利用される情報の正確さを示す情報であればよく、数値の誤差を示す値であっても良いし、正確さを示す指標(例えば、複数段階で正確さを示す情報)であっても良い。
【0042】
表1は、精度情報30bの一例を示す表であり、左側に上位の階層が位置するように配置してプログラムで利用される情報に対応付けられる要素を示すとともに最下位階層の各要素に対応付けられる精度情報の特定単位を示している。すなわち、本実施形態においては、同表1に示すように車両の位置を示す情報と地図情報とによってプログラムで利用される情報を構成している。また、本実施形態において、車両の位置を示す情報は、車両の周囲の地物と車両との相対関係によって特定される情報であり、各種のセンサの測定値に基づいて特定される。具体的には、道路上の構造物や横断歩道などの地物から車両までの距離を示す情報と、車両が走行している走行車線を示す情報と、マッチング処理で特定される道路を示す情報とが、車両の位置を示す情報である。そこで、精度情報30bにおいては、「地物から車両までの距離の精度」と、「車両が走行している走行車線の特定精度」と、「マッチング処理で特定される道路の特定精度」とを精度情報の要素とし、各要素に対して精度情報を対応付けている。
【0043】
また、地図情報は上述の地図情報30aが示す各種の情報であり、地図情報の更新頻度と地図情報の誤差が精度情報30bとなるが、本実施形態においては、要素を階層化することによってより細分化している。すなわち、地図情報の更新頻度は地図情報に対応付けられた要素であるとともに当該要素がさらに細分化され、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」とが精度情報の細分化された要素となっている。そして、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との各要素に対して精度情報を対応付けている。さらに、地図情報の誤差は「平均誤差」と「最大誤差」とに細分化され、さらに「平均誤差」と「最大誤差」とのそれぞれは「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「演算誤差」と「情報表現形式による誤差」とに細分化され、細分化された各要素に対して精度情報を対応付けている。
【表1】
【0044】
なお、本実施形態においては、要素が階層化されているため、ある要素の下位階層に相当する要素を当該ある要素のサブ要素とも呼ぶ。また、本実施形態における精度情報30bにおいては、車両の位置を示す情報の精度を示す精度情報が地物に対応付けて定義されている。例えば、「地物から車両までの距離の精度」を示す精度情報は、精度を示す対象となる地物に対応付けて定義され、「車両が走行している走行車線の特定精度」および「マッチング処理で特定される道路の特定精度」を示す精度情報は精度を示す対象となる道路に対応付けて定義されている。さらに、本実施形態における精度情報30bにおいては、地図情報の精度を示す精度情報が区画に対応付けて定義されている。すなわち、地図情報30aは区画毎に定義されているため、精度情報30bにおいても当該地図情報30aにおける区画に合わせて当該区画毎に精度情報が定義される。以上のように、精度情報30bは地図情報30aに対応付けて定義されている。
【0045】
表1においては、各精度情報の特定単位を示しており、1/mはメートルを単位とした誤差の逆数で精度情報が定義され、%は確率によって精度情報が定義され、候補道路数は車両から所定距離以内に存在するマッチング候補となる道路の個数によって精度情報が定義されることを示している。また、mはメートルを単位とした誤差で精度情報が定義され、日は日を単位とした情報の更新頻度によって精度情報が定義されることを示している。
【0046】
具体的には、「地物から車両までの距離の精度」に対応する精度情報は、GPS受信部41と車速センサ42とジャイロセンサ43とによる車両の位置の誤差(m)と、カメラ44による地物認識距離の誤差(m)との和の逆数を示す情報である。すなわち、地物から車両までの距離の誤差は、地物の位置の誤差と車両の位置の誤差との双方を含むため、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の位置を特定する場合の誤差を予め特定する。また、カメラ44にて撮像された画像に基づいて地物の位置を特定する場合の誤差を予め特定する。そして、双方の誤差の和の逆数を特定し、「地物から車両までの距離の精度」の精度情報とする。
【0047】
「車両が走行している走行車線の特定精度」に対応する精度情報は、走行車線が正しく特定される確率を示す情報である。すなわち、ある道路上で1以上の車線が存在する場合、車両の周囲の車線と車両との相対関係に基づいて車両が走行している走行車線を確定、あるいは特定の車線を走行している確率を特定することができる。例えば、道路の端に存在する車線の境界線が実線であり、車線間の境界線が破線である場合、車両の両側に存在する境界線の双方が実線である場合や、境界線の一方が実線で他方が破線である場合には走行車線を確定することができる。また、車両の両側に存在する境界線の双方が破線である場合、その道路の車線数が3である場合には中央の車線を走行していることが確定し、車線数が4以上である場合には走行車線の候補が2以上になり、特定の車線を走行している確率が特定されるのみである。
【0048】
例えば、車両の両側に存在する境界線の双方が破線あり、かつ、車線数が4である場合、中央に位置する2本の車線のいずれかを走行していることになる。また、車両の両側に存在する境界線が実線、破線のいずれであるのかは、カメラ44にて撮像された画像に基づいて特定される。そこで、本実施形態においては、車両が走行している可能性のある車線候補の数の逆数とカメラ44による車線の境界線の認識率とを乗じた値が「車両が走行している走行車線の特定精度」に対応する精度情報であるとし、道路上の車線に対応付けて精度情報30bとする。例えば、車両が走行している走行車線が左端あるいは右端である場合には、走行車線の特定精度は車線候補の数の逆数(1)×認識率(Aとする)でAとなり、4車線の道路において車両が走行している走行車線が中央に位置する2本のいずれかである場合には、走行車線の特定精度は車線候補の数の逆数(1/2)×認識率(A)でA/2となる。
【0049】
「マッチング処理で特定される道路の特定精度」に対応する精度情報は、車両の走行軌跡と道路の形状との一致度合いに基づいて車両が走行している道路を特定するマッチング処理の正確さを示す情報である。本実施形態においては、車両の周囲にマッチング候補が存在する数が多いほどマッチング精度が低くなるとみなしている。そこで、車両の位置から所定距離以内にマッチング候補となる候補道路が存在する場合に当該候補道路の数を「マッチング処理で特定される道路の特定精度」の精度情報とする。
【0050】
「情報の収集頻度」に対応する精度情報は、ナビゲーション装置10の地図情報30aを管理する管理者が地図情報の計測を行う頻度(例えば、計測者が計測を行う頻度)を示す情報である。すなわち、1回の計測が行われるまでの平均期間を日数で特定し、「情報の収集頻度」の精度情報とする。
【0051】
「情報センターにおける情報の修正頻度」に対応する精度情報は、地図情報を所定の記録媒体に蓄積する情報センターにおいて、新たに収集された地図情報によって記録媒体に記録された既存の地図情報を修正する作業を行う頻度を示す情報である。すなわち、1回の修正が行われるまでの平均期間を日数で特定し、「情報センターにおける情報の修正頻度」の精度情報とする。
【0052】
「車両における情報の修正頻度」に対応する精度情報は、新たに収集された地図情報によって記録媒体30に記録された既存の地図情報30aを車両において修正する作業を行う頻度を示す情報である。すなわち、車両においては可搬記録媒体や通信によって記録媒体30に記録された地図情報30aを修正可能であり、過去の修正作業の履歴を蓄積している。そこで、1回の修正が行われるまでの平均期間を日数で特定し、「車両における情報の修正頻度」の精度情報とする。
【0053】
さらに、精度情報30bにおいては、地図情報30aが示す地物の位置や長さ等の値の誤差を「平均誤差」と「最大誤差」とに分けて定義している。「平均誤差」は上述の区画内における誤差の平均値であり、「最大誤差」は上述の区画内における誤差の最大値である。「現地計測時の誤差」に対応する精度情報は、上述の計測者によって作成された地図情報30aに関する誤差であり、計測者が地物の位置や長さ等を測定したときの測定値と、基準となる測地系での当該地物の位置や長さとのずれを示す情報である。すなわち、当該ずれを区画内の「平均誤差」と「最大誤差」とのそれぞれについて計算し、それぞれを「現地計測時の誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0054】
「出典情報の誤差」に対応する精度情報は、上述の出典が示す情報に基づいて作成された地図情報30aに関する誤差を示す情報であり、出典が示す情報について出典の提供者が明示している「平均誤差」と「最大誤差」のそれぞれを特定し、それぞれを「出典情報の誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0055】
「情報入力時の誤差」に対応する精度情報は、地図情報30aが示す地物の情報の定義付けを行う際の入力誤差を示す情報である。すなわち、地図情報30aにおいては、地物の予め決められた部位を基準にして位置や長さを定義する。例えば、道路上の停止線の中央や端部など特定の部位を基準とし、当該基準についての位置や基準からみた長さ等を定義する。従って、計測者による計測結果等と地物の位置を対応付ける際に、予め決められた基準の位置を誤ってしまうと地物の位置が正確な位置を示していないことになる。そこで、予めこのような誤差について「平均誤差」と「最大誤差」のそれぞれを特定し、それぞれを「出典情報の誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0056】
「演算誤差」に対応する精度情報は、地図情報30aに基づいて演算処理を行う際に生じる誤差を示す情報である。例えば、道路上に設定された形状補間点の位置から曲率半径を算出する際に、当該演算に起因して誤差が生じる。そこで、本実施形態においては、各種の演算を行った場合に発生する誤差を予め特定し、上述の区画内における「平均誤差」と「最大誤差」のそれぞれを特定する。そして、それぞれの誤差を演算による各情報の特定法毎(例えば、四則演算の実行回数)に対応付けて「演算誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0057】
「情報表現形式による誤差」に対応する精度情報は、地図情報30aが示す地物の位置や長さの桁数に依存する誤差を示す情報である。すなわち、本実施形態においては、人口密集地域と過疎地域など、地域によって地図情報30aの情報量が異なるように構成しており、地図情報30aの桁数が区画毎に異なっている。そこで、予め区画毎に桁数が異なることによって生じる「平均誤差」と「最大誤差」のそれぞれを特定し、それぞれを「情報表現形式による誤差」の「平均誤差」と「最大誤差」を示す精度情報とする。
【0058】
以上のような精度情報30bにおいて、各要素に対応する精度情報は互いに独立になることを主眼にして各要素が分類されている。例えば、現地計測時の誤差と出典情報の誤差の一方が変動することによって他方が変動することはない。従って、精度情報30bを修正する際には、要素毎に情報を修正するのみで充分であり、また、複数の要素の精度情報30bを総合的に考慮して信頼度を特定する際に、最小限の数の要素を考慮することによって信頼度を特定することが可能になる。
【0059】
(1−2)走行支援内容決定処理:
次に、信頼度特定プログラム21および実行対象プログラム22の処理内容決定部22aによる走行支援内容決定処理を説明する。信頼度特定プログラム21は、所定の期間(例えば、100ms)毎に実行される。図2は信頼度特定プログラム21が実行する走行支援内容決定処理を示すフローチャートである。
【0060】
実行対象プログラム特定部21aは、実行対象となる実行対象プログラムを特定する機能を制御部20に実現させるモジュールである。走行支援内容決定処理において、まず制御部20は、実行対象プログラム特定部21aの処理により、車両の現在位置を取得し(ステップS100)、実行対象プログラムを特定する(ステップS105)。
【0061】
すなわち、制御部20は、ステップS100において、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号および地図情報30aに基づいて車両の現在位置を特定する。さらに、制御部20は、ステップS105において、地図情報30aに基づいて当該車両の現在位置から所定の範囲に存在する道路の状態(道路形状等)を示す情報を取得し、車両の状態(車速センサ42等に基づいて特定される車速等)を示す情報を取得する。そして、制御部20は、当該道路の状態と車両の状態において実行すべきプログラムを実行対象プログラムとして特定する。なお、当該道路の状態および車両の状態と、実行対象プログラムとの対応を示す情報はプログラム情報30cとして記録媒体30に記録されている。また、本実施形態においては、複数のプログラムから実行対象プログラムを選択する構成としているが、プログラムが1個の場合に、ステップS105において、当該プログラムを実行すべき所定の条件が生じているか否か(例えば、マップマッチング処理によって車両の現在位置が道路に適合しているか否か)を判定し、実行すべき条件である場合にそのプログラムを実行対象プログラムとする構成としても良い。
【0062】
要素選択部21bは、実行対象プログラムの種類に対応する要素を複数の要素から選択する機能を制御部20に実現させるモジュールである。すなわち、プログラムを特定すれば、その処理によってプログラムで利用される情報が確定する。また、当該プログラムで利用される情報の精度を特定するために参照すべき要素は予め特定可能である。そこで、本実施形態においては、共通の要素の精度情報が利用されるプログラムが同じ種類となるようにプログラムを予め分類してある。具体的には、本実施形態において、実行対象プログラムの種類は、当該プログラムで利用される情報の許容誤差に基づいて分類されている。そこで、制御部20は、要素選択部21bの処理により、実行対象プログラムの種類が、当該実行対象プログラムで利用される情報の許容誤差が小さい種類であるのか、当該情報の許容誤差が大きい種類であるのかを判定する(ステップS110)。
【0063】
ステップS110において、実行対象プログラムの種類が、利用する情報の許容誤差が小さい種類であると判定された場合、制御部20は、精度情報30bを参照し、小さい許容誤差に対応した要素を選択する(ステップS115)。一方、実行対象プログラムの種類が、利用する情報の許容誤差が大きい種類であると判定された場合、制御部20は、精度情報30bを参照し、大きい許容誤差に対応した要素を選択する(ステップS120)。本実施形態において、精度情報30bの地図情報の誤差に関する要素は「最大誤差」と「平均誤差」とに分類されているが、実行対象プログラムで利用される情報の許容誤差が小さい場合には地図情報の誤差に関する要素として「最大誤差」が選択され(ステップS115)、情報の許容誤差が大きい場合には地図情報の誤差に関する要素として「最大誤差」が選択される(ステップS120)ように構成されている。
【0064】
すなわち、プログラムで利用される情報が許容誤差を超えるほどの不正確な情報である場合、当該走行支援が適切に実行されない可能性がある。また、プログラムで利用される情報の許容誤差が小さいような走行支援は、走行支援が不適切である場合の悪影響が大きい。例えば、カーブ区間(一定曲率区間の前後にクロソイド区間が形成されている道路)における制動制御と変速制御を想定する。ここで、制動制御は、一定曲率区間において車両に作用する横加速度が所定値(例えば0.4G)となった状態において一定車速で走行することを目的としてクロソイド区間の開始位置から制動部46によるブレーキによって制動を開始する制御である。変速制御は、一定曲率区間において車両に作用する横加速度が所定値(例えば0.2G)となった状態において一定車速で走行することを目的としてクロソイド区間の開始位置に到達する時点から所定期間だけ前の時点(例えば、クロソイド区間の開始位置に到達する2秒前)から変速比を変更することでエンジンブレーキを発生させる制御である。これらの制動制御と変速制御とを比較すると、制動制御における一定曲率区間での横加速度は変速制御における一定曲率区間での横加速度よりも大きく、前者の方が後者よりも横すべりが発生する限界横加速度との差分が小さい。従って、制動制御の方が、制御を実行する際の緊急性が高く、誤制御が生じた場合の違和感が大きく、誤制御が生じた場合の悪影響が大きい。さらに、変速制御においては、変速比の変更によるエンジンブレーキによって減速を補助する構成であり、運転者がブレーキによる制動を実行可能であることを鑑みると特定の変速比において車両に作用する減速度の任意性は高い。従って、制動制御における一定曲率区間の開始位置や道路の曲率半径に関する許容誤差は小さく、変速制御における一定曲率区間の開始位置や道路の曲率半径に関する許容誤差は大きくなる。
【0065】
また、地図情報の誤差における「最大誤差」は誤差があると仮定した場合の最大値であるため、「最大誤差」が許容誤差を超えなければ誤制御は発生しない。しかし、変速制御のように制動部46によるブレーキと組み合わせることによって制御量である減速度が大きく変動し得る走行支援(すなわち、目的とする制御量に正確に合わせることが重要ではない走行支援)で「最大誤差」が許容誤差を超えない条件を設定することは過度に厳しい条件となる。そこで、実行対象プログラムで利用される情報の許容誤差が小さい場合には誤差に関する要素として「最大誤差」を選択し、実行対象プログラムで利用される情報の許容誤差が大きい場合には誤差に関する要素として「平均誤差」を選択する。なお、許容誤差の大小によるプログラムの種類の分類は、誤制御がなされた場合の悪影響の程度に応じて予め決められていればよい。また、ステップS115,S120において制御部20は、誤差に関する要素について「最大誤差」と「平均誤差」とのいずれかを選択しておりそのサブ要素は選択しておらず最下位の要素が確定していないが、当該サブ要素は後の処理によって選択される。すなわち、「最大誤差」と「平均誤差」とは並列関係にある要素であり、いずれか一方が選択された後、後述する処理によってその下位階層のサブ要素が選択される。一方、地図情報の更新頻度についてはステップS115,S120において実行対象プログラムの種類に対応した最下位の要素を選択する。
【0066】
信頼度特定部21cは、選択された要素の精度情報に基づいて、実行対象プログラムで利用される情報の信頼度を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、信頼度特定部21cの処理により、実行対象プログラムで利用される情報を特定(ステップS125)し、特定された情報についてステップS130〜S155にて信頼度を特定する。なお、本実施形態において、車両の位置を示す情報の信頼度を特定するための要素は、車両の位置を示す情報に直接的に対応しているため、ステップS125において、制御部20は、走行支援を行う際に利用される車両の位置を示す情報の精度を示す要素を選択する。また、走行支援を行う際に利用される車両の位置を示す情報が複数である場合、制御部20は、走行支援を行う際に利用される複数の車両の位置を示す情報を特定し、複数の車両の位置を示す情報のそれぞれについて精度を示す要素を選択する。
【0067】
具体的には、制御部20は、ステップS125において、実行対象プログラムの処理によって行われる走行支援を特定し、当該走行支援を行うために参照すべき情報を、実行対象プログラムで利用される情報として特定する。例えば、地物からの距離に基づいて車両制御を行うような走行支援であれば、車両の位置を示す情報として地物からの距離を示す情報を利用することを特定する。そして、制御部20は、当該地物からの距離を示す情報の精度を示す要素を、信頼度を特定するための要素として選択する。
【0068】
次に、制御部20は、信頼度特定部21cの処理により、実行対象プログラムで利用される情報から信頼度特定対象を選定する(ステップS130)。すなわち、ステップS130〜S155にてループ処理によって信頼度を特定するため、実行対象プログラムで利用される情報が一個の場合にはその情報を信頼度特定対象として選定し、実行対象プログラムで利用される情報が複数個の場合にはその情報の中でステップS130〜S155のループ処理で信頼度が特定されていない情報を信頼度特定対象として選定する。
【0069】
次に、制御部20は、参照する精度情報を特定するため、要素選択部21bの処理により、信頼度特定対象の情報が演算によって算出されるか否かを判定し(ステップS135)、信頼度特定対象の情報が演算によって算出されると判定された場合、制御部20は、要素選択部21bの処理により、誤差に関する要素に演算誤差を示す要素を含めた状態として誤差に関する要素を特定する(ステップS140)。一方、ステップS135において信頼度特定対象の情報が演算によって算出されると判定されない場合、制御部20は、要素選択部21bの処理により、誤差に関する要素から演算誤差を示す要素を除外して誤差に関する要素を特定する(ステップS145)。
【0070】
すなわち、上述のステップS115,S120においては「最大誤差」あるいは「平均誤差」のいずれかの要素が選択されているが、そのサブ要素は選択されていないため、ステップS140,S145にてサブ要素を選択する。具体的には、上述の表1に示すように精度情報30bにおいて、「最大誤差」および「平均誤差」の要素は、「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「演算誤差」と「情報表現形式による誤差」とのそれぞれに細分化されている。また、実行対象プログラムで利用される情報が演算によって特定されず地図情報30a等から直接特定される場合には、当該情報は演算誤差の影響を受けない。そこで、実行対象プログラムで利用される情報が演算によって特定される場合、制御部20は、「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「演算誤差」と「情報表現形式による誤差」との全てを選択する。一方、実行対象プログラムで利用される情報が演算によって特定されない場合、制御部20は、「演算誤差」を除外し、「現地計測時の誤差」と「出典情報の誤差」と「情報入力時の誤差」と「情報表現形式による誤差」とを選択する。
【0071】
次に、制御部20は、信頼度特定部21cの処理により、信頼度特定対象についての信頼度を特定する(ステップS150)。本実施形態においては、精度情報30bが示す要素が階層構造になっているため、各階層において考慮すべき精度情報を予め決められた基準に従って評価してより上位の階層の精度を総合評価する作業を繰り返すことによって各要素の総合評価を行って信頼度を特定する構成としている。
【0072】
より具体的には、精度情報30bが示す「地物から車両までの距離の精度」と、「車両が走行している走行車線の特定精度」と、「マッチング処理で特定される道路の特定精度」との各要素については、これらの要素が最下位階層の要素である。本実施形態においては、ステップS125において、実行対象プログラムで利用される情報が特定され、当該情報に応じた要素が選択されているため、ステップS150では、選択された要素の精度情報と閾値とを比較して当該選択された要素について複数段階の評価値を特定し、その組み合わせから車両の位置を示す情報の精度を総合評価するための評価値を特定する。
【0073】
表2は、当該評価値の例を示している。
【表2】
同表2においては、左側に要素毎の評価値、右側に各要素の評価値の組み合わせから特定される車両の位置を示す情報の精度を総合評価するための評価値を示している。
【0074】
この例において、「地物から車両までの距離の精度」については表1に示す精度情報である誤差の逆数と閾値とを比較することによって0〜3の4段階で評価値が特定され、「車両が走行している走行車線の特定精度」については表1に示す精度情報である確率と閾値とを比較することによって0〜3の4段階で評価値が特定される。「マッチング処理で特定される道路の特定精度」については表1に示す精度情報である候補道路数と閾値とを比較することによって0〜2の3段階で評価値が特定される。なお、ここでは、候補道路数が1個より少ない(すなわち車両がマッチングしていない)場合に評価値を0とし、候補道路数が2個以上である場合に評価値を1とし、候補道路数が1個である場合に評価値を2としている。
【0075】
さらに、表2においては、「マッチング処理で特定される道路の特定精度」の評価値が0,1の場合に車両の位置を示す情報の精度を総合評価するための評価値が0,1となるように設定してある。また、「マッチング処理で特定される道路の特定精度」の評価値が2の場合に「地物から車両までの距離の精度」や「車両が走行している走行車線の特定精度」を考慮して、車両の位置を示す情報の精度を総合評価するための評価値が2〜5となるように設定してある。従って、候補道路数が1個であるような、「マッチング処理で特定される道路の特定精度」が極めて正確な場合に限り他の要素(「地物から車両までの距離の精度」や「車両が走行している走行車線の特定精度」)を加味して車両の位置を示す情報の精度を総合評価するための評価値が2以上の値になるように設定していることになる。
【0076】
また、精度情報30bが示す「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との各要素については、これらの要素が最下位層であるため、ステップS150においては、各要素の精度情報を総合評価して上位階層の要素である「地図情報の更新頻度」の評価値を特定する。本実施形態においては、地図情報が新しいと見なせる状態を評価値1、地図情報が古いと見なせる状態を評価値0としている。具体的には、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との中で最少の日数が最も早い地図情報30aの更新頻度である。そこで、「情報の収集頻度」と、「情報センターにおける情報の修正頻度」と、「車両における情報の修正頻度」との中で最少の日数をD1,利用者が可搬記録媒体や通信によって地図情報30aを更新した最近の日からの経過日数をD0とする。そして、1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0077】
一方、精度情報30bが示す「平均誤差」と「最大誤差」の要素については、ステップS115,S120の処理によりいずれかの要素のみが選択されるため、選択された要素についてのみ評価値を特定する。すなわち、「平均誤差」あるいは「最大誤差」のいずれかについて、そのサブ要素であってステップS140,S145のいずれかで選択されたサブ要素について、ステップS150にてその精度情報を特定する。そして、各サブ要素の精度情報に基づいて上位階層である「平均誤差」あるいは「最大誤差」いずれかの評価値を地図情報の誤差に関する総合評価として特定する。
【0078】
具体的には、「現地計測時の誤差」の精度情報をE1、「出典情報の誤差」の精度情報をE2、「情報入力時の誤差」の精度情報をE3、「演算誤差」の精度情報をE4、「情報表現形式による誤差」の精度情報をE5とした場合、ステップS140が実行された場合は1/(E1+E2+E3+E4+E5)と4段階の閾値とを比較することによって「地図情報の誤差」に関する総合評価を示す5段階の評価値(評価値0〜4)を特定する。一方、ステップS145が実行された場合は1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」に関する総合評価を示す5段階の評価値(評価値0〜4)を特定する。
【0079】
以上の処理によって同じ階層の要素である「地図情報の更新頻度」と「地図情報の誤差」とのそれぞれについての総合評価を示す評価値が特定されると、地図情報の精度を総合評価するための評価値を特定する。
【0080】
表3は、地図情報の精度を総合評価するための評価値の例を示している。
【表3】
同表3においては、左側に「地図情報の更新頻度」と「地図情報の誤差」とに関する要素毎の評価値を示し、右側に地図情報の精度を総合評価するための評価値を示している。
【0081】
この例において、「地図情報の更新頻度」については上述のように評価値が0あるいは1で特定されており、「地図情報の誤差」については上述のように評価値が0〜4のいずれかに特定されている。表3においては、「地図情報の更新頻度」の評価値が0の場合に地図情報の精度を総合評価するための評価値が0となるように設定してある。また、「地図情報の更新頻度」の評価値が1の場合に地図情報の精度を総合評価するための評価値が1〜5となるように設定してある。従って、地図情報が新しいと見なせる状態である場合に限り「地図情報の誤差」を加味して地図情報の精度を総合評価するための評価値が1以上の値になるように設定していることになる。
【0082】
以上のようにして、車両の位置を示す情報の精度を総合評価するための評価値(表2)と地図情報の精度を総合評価するための評価値(表3)とが特定されると、制御部20はこれらの評価値の組み合わせから、信頼度特定対象となっている情報の信頼度を特定する。すなわち、各評価値の組み合わせと信頼度との対応関係は予め規定されており、制御部20は、当該対応関係に基づいて信頼度を特定する。なお、表4は当該対応関係の例を示す表である。
【表4】
【0083】
以上のようにしてステップS150において信頼度特定対象についての信頼度を特定すると、制御部20は、信頼度特定部21cの処理により、実行対象プログラムで利用される情報の全てについて信頼度を特定済であるか否かを判定し(ステップS155)、実行対象プログラムで利用される情報の全てについて信頼度を特定済であると判定されない場合にはステップS130以降の処理を繰り返す。
【0084】
実行対象プログラム22の処理内容決定部22aは、信頼度に応じて実行対象プログラムの処理内容を決定する機能を制御部20に実現させるモジュールである。すなわち、ステップS155にて、実行対象プログラムで利用される情報の全てについて信頼度を特定済であると判定された場合、制御部20は、処理内容決定部22aの処理により、ステップS160〜S180にて実行対象プログラムの処理内容を決定する。
【0085】
具体的には、制御部20は、実行対象プログラム22の種類が、制御タイミングを重視すべき種類のプログラムであるのか、制御量を重視すべき種類のプログラムであるのかを判定する(ステップS160)。ステップS160において、実行対象プログラム22の種類が、制御タイミングを重視すべき種類のプログラムであると判定された場合、制御部20は、車両の制御を行う場合の制御タイミングを規定する情報の重要度を高める(ステップS165)。ステップS160において、実行対象プログラム22の種類が、制御量を重視すべき種類のプログラムであると判定された場合、制御部20は、車両の制御を行う場合の制御量を規定する情報の重要度を高める(ステップS170)。そして、制御部20は、重要度に応じて信頼度を重み付け加算し(ステップS175)、加算結果に基づいて実行対象プログラム22の処理内容を決定する(ステップS180)。
【0086】
すなわち、信頼度は実行対象プログラム22で利用される情報のそれぞれについて特定されるため、走行支援を行う際に利用される各情報の信頼度を考慮するが、走行支援毎に実行対象プログラム22で利用される情報の重要度は異なるため、本実施形態においては、当該情報の重要度に応じて信頼度を重み付けして総合評価する構成としている。
【0087】
より具体的には、本実施形態におけるプログラムは、走行支援の目的を達成するために重視すべき要素によっても予め分類されている。例えば、上述の制動制御を行うプログラムは一定曲率区間の曲率半径に基づいて目標車速を決定して車両を制動させる走行支援を行うプログラムである。この種のプログラムにおいては、制御目的に対応する制御量である車両における目標車速を決定する際に利用される曲率半径が誤っていると制御目的の達成確率が低下する。一方、クロソイド区間の開始位置が誤っており、制動開始タイミングに誤差が生じたとしても、車両に作用させる減速度が多少変動するのみで制御目的の達成確率に影響はない。従って、この種のプログラムにおいては制御量が正しくなるように制御を行うことが重要である。このため、制御量を規定する情報(例えば、一定曲率区間を一定車速で走行させる際に、当該一定車速を特定するために参照される情報)の重要度は高く、当該情報の信頼度の重みは大きくなる。
【0088】
一方、変速制御を行うプログラムはクロソイド区間の開始位置に基づいて変速タイミングを決定して変速制御を行うことによって車両において目標の減速度を発生させることが可能な変速比となるように、当該クロソイド区間の開始位置以前に変速が完了するように走行支援を行うプログラムである。この種のプログラムにおいては、変速比を決定する際に利用される減速度に誤差が含まれることにより、決定した変速比が誤りであったとしても、ブレーキ等によって制動を補助することが可能であるとともに、そもそも変速比を変更するのみで所望の減速度となるように制御することは不可能である。しかし、変速開始タイミングを決める際に利用されるクロソイド区間の開始位置が誤っており、クロソイド区間の開始位置以降において変速比が変速されると車両の挙動が乱れる。従って、この種のプログラムにおいては、クロソイド区間の開始位置に到達する前に正しく変速されているように制御タイミングを決定して変速制御を行うことが重要である。このため、制御タイミングを規定する情報(例えば、特定の地点を通過するタイミングで変速制御を行う際に、特定の地点を特定するために参照される情報)の重要度は高く、当該情報の信頼度の重みは大きくなる。
【0089】
以上のように、本実施形態においては、信頼度の重みを調整して重み付け加算した加算結果に基づいて実行対象プログラム22の処理内容を決定している。従って、実行対象プログラムで利用される情報の重要度に応じて信頼度を評価した結果に基づいて実行対象プログラムの処理内容を決定することができる。
【0090】
なお、信頼度を重み付け加算した結果に基づいて実行対象プログラム22の処理内容を決定するための構成としては、種々の構成を採用可能である。例えば、実行対象プログラム22によって複数の走行支援に相当する複数の機能を実行可能に構成し、信頼度の重み付け加算結果が大きい(高い信頼度に相当)ほど、多数個の機能(多数個の走行支援)の実行を許可する構成を採用可能である。より具体的には、制動制御を行うプログラムにより、制御部20が制動部46に対して制御信号を出力して制動を行う機能と、制御部20がユーザーI/F部47に対して制御信号を出力して制動を促すための案内を行う機能とを実現させる構成を想定する。この構成において、信頼度の重み付け加算結果が大きい場合には上述の2個の機能、すなわち、制動部46による制動とユーザーI/F47による案内の実行を許可し、信頼度の重み付け加算結果が小さい場合には上述の2個の中から選択された1個の機能(例えば、ユーザーI/F47による案内)の実行を許可する構成とする。変速部47による変速とユーザーI/F47による案内を実行させる、変速制御を行うプログラムにおいても同様に、信頼度の重み付け加算結果が大きい場合に2個の機能のうちの2個の実行を許可し、信頼度の重み付け加算結果が大きい場合に2個の機能のうちの1個の実行を許可する構成等を採用可能である。この構成によれば、誤った走行支援がなされる確率が小さい場合にはより多様な走行支援を行う構成とすることが可能である。むろん、実行対象プログラムで利用される情報のそれぞれについての信頼度を重み付け加算する処理は、実行対象プログラム22によって実現する構成の他、信頼度特定部21cによって実現する構成など、種々の構成を採用可能である。
【0091】
また、精度情報30bは、プログラムの種類に依存せず、各プログラムで共通の情報群として定義されている。従って、各プログラムで共通の情報群に基づいて信頼度を特定することが可能になり、走行支援毎に精度情報を定義する構成と比較して精度情報30bの容量を抑制することができる。また、精度情報30bにおいては、プログラムで利用される情報の精度を複数の要素毎に定義しているため、要素を選択することによって参照すべき精度情報を特定することが可能になる。さらに、実行対象プログラムの種類に対応する要素を特定することによって信頼度を特定するために参照すべき精度情報を特定することができるため、参照すべき精度情報を容易に特定することができる。また、信頼度を特定するために参照する必要がない精度情報を参照することなく必要十分な処理によって信頼度を特定することができる。以上のように、本発明によれば、多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択することが可能になる。
【0092】
さらに、信頼度に応じて処理内容を決定することができれば、誤制御を防止し、誤制御が発生した場合の影響を予め把握した上で走行支援を行うか否か、あるいはその内容を決定することができる。従って、プログラムで利用される情報が誤っている場合に生じる悪影響を許容範囲内に抑制しつつ走行支援を行うことができる。
【0093】
(2)実施例:
(2−1)カーブ区間における減速制御:
次に、カーブ区間における減速制御を例にして、以上の構成における実施例を説明する。図3は、車両Cの前方に存在するクロソイド区間および一定曲率区間を含むカーブ区間の例を示す図であり、同図3においては、一定曲率区間の前後に設けられたクロソイド区間を破線で示す矢印L0,L1、一定曲率区間を一点鎖線で示す矢印L2で示している。また、図3においては、一定曲率区間に到達する以前のクロソイド区間の開始位置をP0、一定曲率区間の開始位置P1として示している。
【0094】
本例において、走行支援として減速支援と変速支援を行う構成を想定する。すなわち、図1に示す構成において、制動制御を行うプログラムと変速制御を行うプログラムとが予め実行可能に構成され、図2のステップS105でこれらのプログラムが実行対象プログラムとして特定された状態を想定する。
【0095】
この構成において、制動制御を行うプログラムは、一定曲率区間の開始位置P1以降において一定曲率区間を一定の車速Vで走行するように制動制御を行うことを目的としている。具体的には、一定の車速Vは一定曲率区間における横加速度Gおよび一定曲率区間の曲率半径Rに基づいてV=(G・R)1/2として特定され、制御部20は、当該プログラムの処理により、クロソイド区間の開始位置P0から車両の減速を開始させ、一定曲率区間の開始位置P1において特定の横加速度Gで一定の車速Vで走行させるための制御を行う。
【0096】
さらに、制動制御を行うプログラムは、車速を制御するプログラムであって誤制御による影響が大きいためプログラムで利用される情報の許容誤差が小さい種類のプログラムである。また、上述のように、制動制御を行うプログラムは制御量を重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとを示す情報とによって構成される。
【0097】
従って、制動制御を行うプログラムが実行対象プログラムである場合、図2に示すステップS110において、実行対象プログラムは許容誤差が小さい種類のプログラムであると判定される。このため、ステップS115にて考慮すべき誤差に関する要素として「最大誤差」が選択される。また、ステップS125において、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとを示す情報が、実行対象プログラムで利用される情報として特定される。
【0098】
なお、ステップS115においては、精度情報の要素として地図情報の誤差に関する要素と地図情報の更新頻度に関する要素が選択され、ステップS125において車両の位置を示す情報に関する要素が選択される。すなわち、ステップS115,S125により、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとについての精度情報の要素として、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」が選択される。
【0099】
さらに、ステップS130〜S155のループ処理においては、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとのそれぞれを信頼度特定対象として信頼度を特定する処理が行われる。ここで、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1とは地図情報30aのノード情報から直接特定されるため、ステップS135において演算によって算出されると判定されず、ステップS145にて「演算誤差」を示す要素を除外して誤差に関する要素が特定される。すなわち、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」が誤差に関する要素として特定される。
【0100】
ステップS150においては、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」および「最大誤差」に対応する「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」に基づいて信頼度が特定される。すなわち、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の現在位置を特定し、地図情報30aに基づいて車両が現在走行している道路が図3のように車線数1の道路であることを特定する。そして、制御部20は精度情報30bを参照し、当該車線数1の道路に関する「車両が走行している走行車線の特定精度」の精度情報を特定し、「車両が走行している走行車線の特定精度」の評価値を0〜3のいずれかに特定する。
【0101】
また、制御部20は、地図情報30aを参照して車両が現在走行している道路(すなわちマッチング処理で特定された道路)の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。
【0102】
さらに、制御部20は、地図情報30aを参照して車両の現在位置が存在する区画を特定し、精度情報30bを参照して当該区画における「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」の精度情報を特定し、最少の日数D1を特定する。さらに、制御部20は、利用者が可搬記録媒体や通信によって地図情報30aを更新した日からの経過日数D0を特定する。そして、制御部20は1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0103】
さらに、制御部20は、精度情報30bを参照して「最大誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」を総合評価するための評価値を0〜4のいずれかに特定する。
【0104】
さらに、制御部20は、以上のようにして特定された「地図情報の更新頻度」を総合評価するための評価値と「地図情報の誤差」を総合評価するための評価値と表3に基づいて「地図情報の精度」を総合評価するための評価値を特定する。さらに、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値と「地図情報の精度」を総合評価するための評価値と表4に基づいて、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1の信頼度を特定する。
【0105】
一方、曲率半径Rは、地図情報30aの形状補間点を示す情報から隣接する3カ所の形状補間点を通る円が特定され、当該円の半径を曲率半径Rとみなすことによって特定される。従って、ステップS135において演算によって算出されると判定され、ステップS140にて、3点から円の半径を算出する際の特定法に対応付けられた「演算誤差」と、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」とが誤差に関する要素として特定される。
【0106】
このため、曲率半径Rの信頼度を特定するために実行されるステップS150においては、誤差に関する要素に「演算誤差」が含まれている点が上述のクロソイド区間の開始位置P0と一定曲率区間の開始位置P1の信頼度を特定するために実行されるステップS150と異なっている。すなわち、曲率半径Rの信頼度を特定するために実行されるステップS150において、制御部20は、精度情報30bを参照して「最大誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「演算誤差」の精度情報E4、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E4+E5)と4段階の閾値とを比較することによって「地図情報の誤差」に関する総合評価を示す5段階の評価値を0〜4のいずれかに特定する。他の演算に関してはクロソイド区間の開始位置P0と一定曲率区間の開始位置P1の信頼度を特定するために実行されるステップS150と同様である。
【0107】
以上のようにしてクロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとのそれぞれについて信頼度が特定されると、制御部20は、ステップS160において、実行対象プログラムの種類を判定する。そして、制御部20は、制動制御を行うプログラムが、制御量を重視すべき種類のプログラムであると判定してステップS170を実行する。制動制御を行うプログラムにおいては、上述のように、一定曲率区間の曲率半径Rに基づいて一定の車速V=(G・R)1/2を特定するため、当該一定の車速Vが制御目的に対応する制動制御の制御量を規定するパラメータとなる。一方、制動制御を行うプログラムは、クロソイド区間の開始位置P0から車両の減速を開始させ、一定曲率区間の開始位置P1において特定の横加速度Gで一定の車速Vで走行させる。従って、クロソイド区間の開始位置P0および一定曲率区間の開始位置P1は制御タイミングを規定するパラメータとなる。
【0108】
そこで、制御部20は、ステップS170において曲率半径Rの重要度を、クロソイド区間の開始位置P0および一定曲率区間の開始位置P1よりも高く設定してステップS175にて重み付け加算を行う。そして、ステップS180においては、加算結果に基づいて実行対象プログラムの処理内容を決定する。本例においては、信頼度が所定の閾値を超える場合に制動制御を実行し、信頼度が所定の閾値よりも小さい場合には制動制御を実行しない構成となっている。従って、誤制御を発生させないように実行対象プログラムの処理内容を決定することが可能である。
【0109】
一方、変速制御を行うプログラムは、クロソイド区間の開始位置P0以降において所定の減速度を発生させるために必要な変速比となるように変速制御を行い、減速開始前に準備しておくことを目的としている。この構成において、制動制御を行うプログラムは、クロソイド区間の開始位置P0以降に減速を開始して一定曲率区間の開始位置P1以降において一定曲率区間を一定の車速Vで走行するため減速度を特定し、当該減速度を発生させるために必要な変速比を特定する。そして、車両がクロソイド区間の開始位置P0に到達した時点で変速制御を開始する。
【0110】
さらに、制動制御を行うプログラムは、車速を制御するプログラムであって変速比の変更タイミングが多少前後に変動した場合に車両に与える影響は小さいため、プログラムで利用される情報の許容誤差が大きい種類のプログラムである。また、上述のように、変速制御を行うプログラムは制御タイミングを重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとを示す情報とによって構成され、変速タイミングを規定するクロソイド区間の開始位置P0の重要度は一定曲率区間の開始位置P1と曲率半径Rとよりも高い。
【0111】
従って、変速制御を行うプログラムが実行対象プログラムである場合、図2に示すステップS110を経てステップS120にて考慮すべき誤差に関する要素として「平均誤差」が選択される。また、ステップS125〜S155のループ処理においては、誤差に関する要素が「平均誤差」である以外は制動制御を行うプログラムにおける処理と同様である。
【0112】
クロソイド区間の開始位置P0と一定曲率区間の開始位置P1と曲率半径Rとのそれぞれについて信頼度が特定されると、ステップS160において、実行対象プログラムの種類が制御タイミングを重視すべき種類のプログラムであると判定される。このため、制御タイミングを規定するパラメータであるクロソイド区間の開始位置P0の重要度を、一定曲率区間の開始位置P1および曲率半径Rよりも高く設定してステップS175にて重み付け加算を行う。そして、ステップS180において、加算結果に基づいて実行対象プログラムである変速制御を実行するか否かを決定する。
【0113】
(2−2)停止線到達前における減速制御:
次に、停止線到達前における減速制御における実施例を説明する。図4Aは、車両Cの前方に交差点への進入前に車両Cを一時停止させるための停止線Sが存在する1車線の道路を示している。また、図4Aにおいては車両Cが走行している道路において車両Cの後方に横断歩道Pが存在する例を示している。
【0114】
本例において、走行支援として減速支援を行う構成を想定する。すなわち、図1に示す構成において、減速制御を行うプログラムが予め実行可能に構成され、図2のステップS105で当該減速制御を行うプログラムが実行対象プログラムとして特定された状態を想定する。
【0115】
この構成において、減速制御を行うプログラムの処理により、制御部20は、地図情報30aを参照して横断歩道Pの位置および停止線Sの位置に基づいて両者の間の距離L4を取得する。また、制御部20は、カメラ44の出力に基づいて横断歩道Pを検出し、当該横断歩道Pを検出した時点における横断歩道Pと車両Cとの距離およびカメラ44にて横断歩道Pを検出した時点以降の車両Cの走行距離に基づいて横断歩道Pから車両Cまでの距離L3を検出する。
【0116】
そして、距離L4−距離L3が所定距離以下になった時点から減速を開始し、当該時点から停止線Sに到達するまでの過程で減速制御を行う。すなわち、当該停止線Sに到達するまでの過程で車両の現在車速を0にするための制御を行う。
【0117】
本例においても減速制御を行うプログラムは上述の実施例と同様にプログラムで利用される情報の許容誤差が小さい種類のプログラムであり、制御量を重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、地図情報30aが示す横断歩道Pの位置および停止線Sの位置および横断歩道Pから車両Cまでの距離L3である。
【0118】
本例においては、車両Cが1車線の道路を走行している状態において前方の所定範囲に横断歩道Pが存在する場合に、減速制御を行うプログラムが実行対象プログラムとなる。また、図2に示すステップS110を経てステップS115にて考慮すべき誤差に関する要素として「最大誤差」が選択される。また、ステップS115においては、精度情報の要素として誤差に関する要素と地図情報の更新頻度に関する要素が選択され、ステップS125において車両の位置を示す情報に関する要素が選択される。すなわち、ステップS115,S125により、横断歩道Pの位置および停止線Sの位置の精度を示す要素として、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」,「最大誤差」が選択される。また、横断歩道Pから車両Cまでの距離L3を示す情報は地図情報30aを参照することなく特定される情報であるため、横断歩道Pから車両Cまでの距離L3を示す情報の精度を示す要素として、「地物から車両までの距離の精度」,「マッチング処理で特定される道路の特定精度」が選択される。
【0119】
さらに、横断歩道Pの位置、停止線Sの位置を示す情報は、演算によって特定される情報でないため、ステップS135の判定を経て制御部20は、「演算誤差」を示す要素を除外した状態で誤差に関する要素を特定する。すなわち、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」が誤差に関する要素として特定される。なお、横断歩道Pから車両Cまでの距離L3も演算によって特定される情報ではないが、横断歩道Pから車両Cまでの距離L3を特定するために地図情報30aは参照されないため、横断歩道Pから車両Cまでの距離L3に関してはステップS150〜S145が省略される。以上のように、横断歩道Pの位置、停止線Sの位置および横断歩道Pから車両Cまでの距離L3について要素が選択されると、制御部20は、ステップS150において信頼度を特定する。
【0120】
すなわち、横断歩道Pの位置、停止線Sの位置を示す情報について、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の現在位置を特定し、地図情報30aに基づいて車両が現在走行している道路の車線数が1であることを特定する。そして、制御部20は精度情報30bを参照し、当該車線数1の道路に関する「車両が走行している走行車線の特定精度」の精度情報を特定し、「車両が走行している走行車線の特定精度」の評価値を0〜3のいずれかに特定する。
【0121】
また、制御部20は、地図情報30aを参照して車両が現在走行している道路の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。
【0122】
さらに、制御部20は、地図情報30aを参照して横断歩道Pおよび停止線Sが走行している道路が存在する区画を特定し、精度情報30bを参照して当該区画における「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」の精度情報を特定し、最少の日数D1を特定する。さらに、制御部20は、利用者が可搬記録媒体や通信によって地図情報30aを更新した日からの経過日数D0を特定する。そして、制御部20は1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0123】
さらに、制御部20は、精度情報30bを参照して「最大誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」を総合評価するための評価値を0〜4のいずれかに特定する。
【0124】
さらに、制御部20は、以上のようにして特定された「地図情報の更新頻度」を総合評価するための評価値と「地図情報の誤差」を総合評価するための評価値と表3に基づいて「地図情報の精度」を総合評価するための評価値を特定する。さらに、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値と「地図情報の精度」を総合評価するための評価値と表4に基づいて、横断歩道Pの位置、停止線Sの位置を示す情報の信頼度を特定する。
【0125】
さらに、横断歩道Pから車両Cまでの距離L3を示す情報についての精度情報の要素は「地物から車両までの距離の精度」,「マッチング処理で特定される道路の特定精度」であるため、制御部20は精度情報30bを参照し、車両Cにおける「地物から車両までの距離の精度」の精度情報を特定し、「地物から車両までの距離の精度」の評価値を0〜3のいずれかに特定する。また、制御部20は、地図情報30aを参照して車両が現在走行している道路の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。横断歩道Pから車両Cまでの距離L3を示す情報は、地図情報30aを参照して特定する情報ではないため、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値を横断歩道Pから車両Cまでの距離L3を示す情報の信頼度とする。
【0126】
さらに、本例において、実行対象プログラムで利用される情報は、横断歩道Pの位置および停止線Sの位置および横断歩道Pから車両Cまでの距離L3であるが、制御量を規定するために横断歩道Pの位置および停止線Sの位置および横断歩道Pから車両Cまでの距離L3を参照するため、ステップS160,S170において各情報の重みは等しい重みに設定される。この結果、ステップS180において、ステップS150で特定された信頼度を重み付け加算した加算結果に基づいて実行対象プログラムの処理内容を決定する。本例においては、信頼度が高い場合に減速制御を行い、信頼度が低い場合に前方に停止線が存在することを示す案内を行う。
【0127】
(2−3)前方の交差点に関する案内:
次に、前方の交差点に関する案内における実施例を説明する。図4Bは、片側2車線の道路を車両Cが走行している例を示している。本例において、走行支援として車両の前方の交差点における案内を行う構成を想定する。すなわち、図1に示す構成において、前方の交差点における案内を行うプログラムが予め実行可能に構成され、図2のステップS105で当該前方の交差点における案内を行うプログラムが実行対象プログラムとして特定された状態を想定する。
【0128】
この構成において、前方の交差点における案内を行うプログラムの処理により制御部20は、車両Cにおいて予め設定された経路を示す情報を取得し、車両Cの前方における経路に沿って車両Cを走行するための車線および交差点における進行方向を特定して案内する。
【0129】
本例において前方の交差点における案内を行うプログラムは交差点における経路を案内するが、交差点の位置などの際に応じて変動する制御量等を決定することはない。従って、プログラムで利用される情報の許容誤差が大きい種類のプログラムである。また、交差点に到達する以前に案内が行われていることが重要であるため、制御タイミングを重視すべき種類のプログラムである。さらに、当該プログラムで利用される情報は、交差点を示す情報と車両の現在位置(走行車線と走行している道路)を示す情報である。
【0130】
本例においては、車両Cの前方の所定範囲内に交差点が存在する場合に、前方の交差点における案内を行うプログラムが実行対象プログラムとなる。また、前方の交差点における案内を行うプログラムは、プログラムで利用される情報の許容誤差が大きい種類のプログラムであるため、図2に示すステップS110を経てステップS120にて考慮すべき誤差に関する要素として「平均誤差」が選択される。また、ステップS120においては、精度情報の要素として地図情報の誤差に関する要素と地図情報の更新頻度に関する要素が選択され、ステップS125において車両の位置を示す情報に関する要素が選択される。すなわち、ステップS120,S125により、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」,「平均誤差」が選択される。
【0131】
さらに、交差点を示す情報と車両の現在位置を示す情報は、演算によって特定される情報でないため、ステップS135の判定を経て制御部20は、「演算誤差」を示す要素を除外した状態で誤差に関する要素を特定する。すなわち、「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」が誤差に関する要素として特定される。
【0132】
制御部20は、ステップS150において、「車両が走行している走行車線の特定精度」,「マッチング処理で特定される道路の特定精度」,「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」および「平均誤差」に対応する「現地計測時の誤差」、「出典情報の誤差」、「情報入力時の誤差」、「情報表現形式による誤差」に基づいて信頼度を特定する。
【0133】
すなわち、制御部20は、GPS受信部41と車速センサ42とジャイロセンサ43との出力信号に基づいて車両の現在位置を特定し、地図情報30aに基づいて車両が現在走行している道路の車線数を特定する。そして、制御部20は精度情報30bを参照し、当該車線数の道路に関する「車両が走行している走行車線の特定精度」の精度情報を特定し、「車両が走行している走行車線の特定精度」の評価値を0〜3のいずれかに特定する。
【0134】
また、制御部20は、地図情報30aを参照して車両が現在走行している道路の周辺に候補道路が存在するか否かを判定し、精度情報30bを参照して候補道路の数に対応する「マッチング処理で特定される道路の特定精度」精度情報を特定し、「マッチング処理で特定される道路の特定精度」の評価値を0〜2のいずれかに特定する。そして、制御部20は、表2に基づいて「車両の位置を示す情報」の精度を総合評価するための評価値を特定する。
【0135】
さらに、制御部20は、地図情報30aを参照して車両の前方の交差点および車両が走行している道路が存在する区画を特定し、精度情報30bを参照して当該区画における「情報の収集頻度」,「情報センターにおける情報の修正頻度」,「車両における情報の修正頻度」の精度情報を特定し、最少の日数D1を特定する。さらに、制御部20は、利用者が可搬記録媒体や通信によって地図情報30aを更新した日からの経過日数D0を特定する。そして、制御部20は1−(D0/D1)が正の場合に「地図情報の更新頻度」を総合評価するための評価値が1、1−(D0/D1)が負の場合に「地図情報の更新頻度」を総合評価するための評価値が0となるように設定する。
【0136】
さらに、制御部20は、精度情報30bを参照して「平均誤差」に対応する「現地計測時の誤差」の精度情報E1、「出典情報の誤差」の精度情報E2、「情報入力時の誤差」の精度情報E3、「情報表現形式による誤差」の精度情報E5を特定する。そして、1/(E1+E2+E3+E5)と4段階の閾値とを比較することによって「地図情報の誤差」を総合評価するための評価値を0〜4のいずれかに特定する。
【0137】
さらに、制御部20は、以上のようにして特定された「地図情報の更新頻度」を総合評価するための評価値と「地図情報の誤差」を総合評価するための評価値と表3に基づいて「地図情報の精度」を総合評価するための評価値を特定する。さらに、制御部20は、「車両の位置を示す情報」の精度を総合評価するための評価値と「地図情報の精度」を総合評価するための評価値と表4に基づいて、交差点を示す情報と車両の現在位置を示す情報の信頼度を特定する。
【0138】
さらに、本例においては、交差点を示す情報と車両の現在位置を示す情報とのいずれも同等の重要度であるため、ステップS160〜S170は省略し、制御部20は、ステップS180において、交差点を示す情報と車両の現在位置を示す情報とのそれぞれの信頼度の和に基づいて実行対象プログラムの処理内容を決定する。本例においては、信頼度が高い場合に車線変更の案内および走行経路の案内を実行し、信頼度が低い場合に車線変更の案内は実行せず走行経路の案内を実行する。
【0139】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、信頼度を特定するための精度情報を実行対象プログラムの種類に対応した要素に基づいて選択する限りにおいて、他にも種々の実施形態を採用可能である。例えば、プログラムは車両内に存在する制御部によって実行されて車両の走行を支援する所定の機能を実現することができればよい。また、走行支援は車両を運転する運転者への支援であり、実行対象プログラムで利用される情報の精度によってその支援の品質が変動するものを対象とすればよい。従って、プログラムは上述の例以外にも、車両制御への介入、補助、警告、注意喚起等の案内など各種の走行支援を行う各種のプログラムを採用可能である。
【0140】
なお、上述の実施形態においては、プログラムで利用される情報の許容誤差と制御において重視すべき事項とに基づいて実行対象プログラムの種類を分類していたが、他にも種々の分類を採用することができる。例えば、各種の走行支援の中には誤った支援を行うことによる影響の程度によって、誤った支援を行うことが許容されない支援と仮に誤った支援を行ってもそれが許容される支援とが存在する。安全性向上のための制御において誤った支援を行うと安全性を低下させかねないが、利便性向上のための制御において誤った支援を行った場合、利便性が低下し得るものの安全性に影響はない。従って、安全性向上のための制御を行うプログラムと利便性向上のための制御を行うプログラムとを異なる種類に分類する構成としても良い。また、プログラムの処理による制御が行われる制御対象が異なる場合(例えば、制御対象が制御部である場合と変速部である場合)にプログラムを異なる種類に分類しても良い。
【0141】
さらに、走行支援を行う際に複数の情報を利用する場合にそれぞれの情報についての信頼度を特定して信頼度を総合的に判定する構成の他、それぞれの信頼度を個別に評価する構成としても良い。
【0142】
さらに、精度情報30bは、上述の構成以外にも種々の構成を採用可能である。例えば、上述の構成においては、「車両の位置を示す情報」の精度を示す要素として、プログラムで利用される情報の態様に直接的に対応した要素(例えば、地物から車両までの距離)を精度情報30bに含める構成としたが、「車両の位置を示す情報」の精度をセンサの精度によって表現する構成としても良い。例えば、GPS受信部と車速センサ42とジャイロセンサ43とによって車両の位置を特定する際の精度や加速度センサによって加速度を測定する際の精度を、「車両の位置を示す情報」の精度を示す要素に含める構成としても良い。
【0143】
さらに、地図情報30aに含まれる情報の不変性を、地図情報の精度を示す要素に含める構成としても良い。例えば、道路工事や道路の新設を行うことによって道路形状が変化する可能性や変化する頻度等を当該不変性を示す精度情報として精度情報30bに含める構成を採用可能である。
【0144】
表5は、精度情報30bの一例を示す表である。同表5においても左側に上位の階層が位置するように配置してプログラムで利用される情報に対応付けられる階層化された要素を示すとともに、最下位階層の各要素に対応付けられる精度情報の特定単位を示している。
【表5】
同表5においては、道路の不変性が地図情報の精度を示す要素を構成する場合における当該道路の不変性に関する精度情報30bの例を示している。すなわち、地図情報30aが示す道路に関する情報はある時点における道路の形状や道路の位置等を示す情報であるため、道路工事や道路の新設などによって地図情報30aが示す道路と実際の道路とが異なる状況が発生し得る。そこで、道路が変化する可能性を示す複数の指標を複数の要素として定義し、予め決められた道路区間毎に複数の要素毎の精度情報を定義して精度情報30bを構成する。なお、道路区間は、道路の不変性が共通となると推定される道路の集合を定義することができればよく、ノードを端点とした区間(リンク)によって道路区間を構成してもよいし、同じ名称の道路(例えば、東名高速道路等)によって道路区間を構成してもよいし、同じ名称の道路上における特定の施設(例えば、インターチェンジ等)間の道路によって道路区間を構成してもよく、種々の構成を採用可能である。むろん、上述の実施形態のように地図情報30aにおける区画毎に各道路区間の不変性を示す要素を定義しても良い。
【0145】
表5に示す例においては、「工事の頻度」と、「経年変化の程度」と、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」とが道路の不変性を示す要素とされている。また、「工事の頻度」は、「変更頻度」と、「追加頻度」と、「削除頻度」とに細分化される。また、「変更頻度」は、さらに「カーブ区間の形状の変更頻度」、「勾配区間の形状の変更頻度」、「車線種別の変更頻度」、「立体構造物種別の変更頻度」、「ペイント種別の変更頻度」に関する要素に細分化され、細分化された各要素に対して精度情報が対応付けられる。
【0146】
「追加頻度」は、さらに「カーブ区間の追加頻度」、「勾配区間の追加頻度」、「車線の追加頻度」、「立体構造物の追加頻度」、「ペイントの追加頻度」に関する要素に細分化され、細分化された各要素に対して精度情報が対応付けられる。「削除頻度」は、さらに「カーブ区間の削除頻度」、「勾配区間の削除頻度」、「車線の削除頻度」、「立体構造物の削除頻度」、「ペイントの削除頻度」に関する要素に細分化され、細分化された各要素に対して精度情報が対応付けられる。
【0147】
また、「経年変化の程度」は、「補修頻度」と、「交通量」とに細分化され、「補修頻度」は「ペイントの補修頻度」と、「路面凹凸の補修頻度」とに細分化される。「経年変化の程度」に関しては、「ペイントの補修頻度」と、「路面凹凸の補修頻度」と、「交通量」との各要素が最下位階層となっており、これらの各要素に対して精度情報が対応付けられる。さらに、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」とは、これらの要素が最下位階層の要素であり、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」との各要素に対して精度情報が対応付けられる。
【0148】
表5においても、右端の列にて各精度情報の特定単位を示しており、件/年は年間の発生件数によって精度情報が定義され、台/年は年間の走行車両数によって精度情報が定義されることを示している。なお、工事や補修の件数は、工事や補修が開始されてから終了するまでの作業を1件と数えることによって定義される。渋滞の件数は、単位時間あたりの車両の数が閾値を超えた後、再び閾値を下回った場合に渋滞が1件発生したと数えることによって定義される。
【0149】
具体的には、精度情報30bによって精度を示す対象となる道路区間が、単位距離あたりの曲率が所定の閾値以上となっているカーブ区間を含み、当該カーブ区間において工事によって曲率が変更される場合、その変更工事の年間の平均件数を示す情報が「カーブ区間の形状の変更頻度」に対応する精度情報となる。カーブ区間の道路が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「カーブ区間の追加頻度」に対応する精度情報となる。さらに、カーブ区間の道路が工事によって削除される場合には、その削除工事の年間の平均件数を示す情報が「カーブ区間の削除頻度」に対応する精度情報となる。
【0150】
また、精度情報30bによって精度を示す対象となる道路区間が、単位距離あたりの標高変化が所定の閾値以上となっている勾配区間を含み、当該勾配区間において工事によって勾配区間の形状が変更される場合、その変更工事の年間の平均件数を示す情報が「勾配区間の形状の変更頻度」に対応する精度情報となる。勾配区間の道路が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「勾配区間の追加頻度」に対応する精度情報となる。さらに、勾配区間の道路が工事によって削除される場合には、その削除工事の年間の平均件数を示す情報が「勾配区間の削除頻度」に対応する精度情報となる。
【0151】
さらに、精度情報30bによって精度を示す対象となる道路区間において、既存道路の車線種別を他の車線種別に変更する工事が行われる場合、その変更工事の年間の平均件数を示す情報が「車線種別の変更頻度」に対応する精度情報となる。車線が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「車線の追加頻度」に対応する精度情報となる。さらに、車線が工事によって削除される(車線数を減少させる)場合には、その削除工事の年間の平均件数を示す情報が「車線の削除頻度」に対応する精度情報となる。
【0152】
さらに、精度情報30bによって精度を示す対象となる道路区間において、当該道路区間上あるいは当該道路区間周辺の立体構造物(信号機や交通標識等)を他の種別に変更する(例えば、信号機の種類を変更する)工事が行われる場合、その変更工事の年間の平均件数を示す情報が「立体構造物種別の変更頻度」に対応する精度情報となる。立体構造物が工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「立体構造物の追加頻度」に対応する精度情報となる。さらに、立体構造物が工事によって削除される(立体構造物数を減少させる)場合には、その削除工事の年間の平均件数を示す情報が「立体構造物の削除頻度」に対応する精度情報となる。
【0153】
さらに、精度情報30bによって精度を示す対象となる道路区間において、当該道路区間上のペイント(進行方向指示矢印や停止線等)を他の種別に変更する(例えば、進行方向規制の変更に伴って進行方向指示矢印の向きを変更する)工事が行われる場合、その変更工事の年間の平均件数を示す情報が「ペイント種別の変更頻度」に対応する精度情報となる。ペイントが工事によって追加される場合には、その追加工事の年間の平均件数を示す情報が「ペイントの追加頻度」に対応する精度情報となる。さらに、ペイントが工事によって削除される場合には、その削除工事の年間の平均件数を示す情報が「ペイントの削除頻度」に対応する精度情報となる。
【0154】
さらに、道路上のペイントが劣化し、また、路面の凹凸が増加すると補修されるため、精度情報30bによって精度を示す対象となる道路区間において当該道路区間上のペイントや路面の凹凸が補修される場合、その補修の年間の平均件数が大きいほど経年変化の程度が大きいといえる。そこで、本例においては、当該道路上のペイントに対する補修の年間の平均件数を示す情報を「ペイント種別の補修頻度」に対応する精度情報とし、路面の凹凸に対する補修の年間の平均件数を示す情報を「路面の凹凸の補修頻度」に対応する精度情報としている。
【0155】
さらに、道路を走行する車両の台数が多いほど単位時間あたりの道路の経年変化が激しくなるため、本例においては、精度情報30bによって精度を示す対象となる道路区間を通過する車両の年間の平均台数を示す情報を「交通量」に対応する精度情報としている。
【0156】
さらに、道路上で交通事故が発生する可能性が高い場合や、渋滞が発生する可能性が高い場合、道路周辺の住民等から頻繁に道路改善が要望される場合には、道路の形状を変更し、あるいは道路上で地物を変更、追加、削除するなど、道路に関する変更がなされる可能性が高くなる。そこで、本例においては、精度情報30bによって精度を示す対象となる道路区間上での年間における交通事故の平均発生件数を示す「交通事故の頻度」、年間における渋滞の平均発生件数を示す「渋滞の頻度」、年間において公的機関等が受け取る道路改善要望の平均件数を示す「道路改善要望の頻度」を精度情報としている。
【0157】
以上のような情報が精度情報30bに含まれる構成においては、実行対象プログラムに応じて要素を選択することにより、道路の不変性を反映した信頼度を取得することが可能である。すなわち、図1に示す構成と同様の構成において、精度情報30bに表5に示す情報を含む構成とし、制御部20にて図2と同様の処理を実行する。但し、実行対象プログラムで地図情報の不変性を考慮すべき場合には、ステップS125において表5に示す要素を実行対象プログラムに応じて選択し、表5に示す要素が選択された場合にはステップS150においてこれらの要素に対応した精度情報に基づいて信頼度を特定する。また、ステップS160〜S180においては、これらの要素に対応した重み付け加算を行って実行対象プログラムの処理内容を決定する。
【0158】
具体的には、制御部20は、実行対象プログラムの種類に応じて表5に示す要素を取捨選択する。例えば、実行対象プログラムが道路のペイントに関する情報を利用して処理を行う種類のプログラムである場合、ステップS125において制御部20は、実行対象プログラムが道路のペイントに関する情報を利用することを特定する。また、ペイントに関する情報の精度を示す要素として、表5に示す精度情報の中から「ペイント種別の変更頻度」と、「ペイントの追加頻度」と、「ペイントの削除頻度」と、「ペイントの補修頻度」と、「交通量」と、「交通事故の頻度」と、「渋滞の頻度」と、「道路改善要望の頻度」とを選択する。
【0159】
次に、制御部20はステップS130〜S155の処理を行うが、ペイントに関する情報の信頼度を特定する場合、制御部20はステップS150において、上述のステップS125で選択された要素の精度情報に基づいて道路の不変性に関する評価値を特定する。具体的には、制御部20が精度情報30bを参照し、「ペイント種別の変更頻度」の精度情報a(件/年)と、「ペイントの追加頻度」の精度情報b(件/年)と、「ペイントの削除頻度」の精度情報c(件/年)と、「ペイントの補修頻度」の精度情報d(件/年)と、「交通量」の精度情報e(台/年)と、「交通事故の頻度」の精度情報f(件/年)と、「渋滞の頻度」の精度情報g(件/年)と、「道路改善要望の頻度」の精度情報h(件/年)とを取得する。
【0160】
そして、(a+b+c)を「工事の頻度」に関する評価値、(e/d)を「経年変化の程度」に関する評価値、fを「交通事故の頻度」に関する評価値、gを「渋滞の頻度」に関する評価値、hを「道路改善要望の頻度」に関する評価値とする。さらに、((1/(a+b+c))+(1/(e/d))+(1/f)+(1/g)+(1/h))を「道路の不変性」に関する評価値とする。むろん、以上の評価値の演算において、各精度情報に所定の係数を乗じて加算する構成としても良いし、単位を調整(例えば、「交通量」を万台/年で評価する)しても良い。
【0161】
以上のように道路の不変性に関する評価値を特定すると、制御部20は、地図情報の誤差や更新頻度等に関する評価値を考慮してペイントに関する情報の信頼度を特定する。さらに、ステップS150〜S175においては、実行対象プログラムで利用する情報の重要度に応じて信頼度を重み付け加算して実行対象プログラムの処理内容を決定する。以上のように、精度情報30bに道路の不変性に関する要素毎の精度情報を含める構成とすれば、実行対象プログラムで利用される情報が道路に対する変更の影響を受ける場合であっても当該実行対象プログラムで利用される情報の信頼度を評価することが可能になる。
【0162】
むろん、信頼度の評価方法は種々の評価方法を採用可能であり、上述のように地図情報の誤差や更新頻度等に関する評価値を考慮して信頼度を総合評価しても良いし、道路の不変性に関する評価値を道路の不変性に関する信頼度とみなして実行対象プログラムにおける処理内容を決定しても良い。例えば、道路の不変性に関する評価値を3段階で評価し、道路が変化する可能性が最も高い評価値である場合に実行対象プログラムによる処理を中止し、次に道路が変化する可能性が高い評価値である場合に実行対象プログラムによって利用者に対する案内を行い、道路が変化する可能性が最も低い評価値である場合に実行対象プログラムによって車両の制御を実行する構成等を採用可能である。
【0163】
なお、上述の表5のような例は、他にも種々の態様に適用可能である。例えば、実行対象プログラムの目的に応じて利用される情報が異なる場合に、各情報に対応した要素を選択するように構成してもよい。より具体的な構成として、地図情報30aに道路上の凹凸の位置を示す情報を含める構成とし、制御部20において、地図情報30aを参照して当該凹凸の位置を特定し、当該凹凸に応じてサスペンションの制御を行う実行対象プログラムと、道路の曲率に応じてサスペンションや変速比の制御を行う実行対象プログラムとが実行可能である構成を想定する。また、この構成において「工事の頻度」と「経年変化の程度」とのいずれかまたは双方を考慮して信頼度を評価する構成を想定する。この構成において、道路上の凹凸に応じてサスペンションの制御を行う実行対象プログラムにおいては道路上の凹凸に影響を与え得る要素を選択する必要があるため、制御部20は、「工事の頻度」と「経年変化の程度」との双方の要素について精度情報を参照して信頼度を特定する。一方、道路の曲率に応じてサスペンションや変速比の制御を行う実行対象プログラムにおいては道路の曲率に影響を与え得る要素を選択すればよいため、制御部20は精度情報を参照すべき要素として「工事の頻度」を選択するが、「経年変化の程度」は選択しないことになる。この構成によれば、実行対象プログラムにて利用する情報の信頼度を適切に評価することが可能になる。
【0164】
さらに、プログラムで利用される情報の信頼度を特定するための精度情報は、他にも種々の情報によって定義することができる。例えば、ナビゲーション装置10が搭載された車両においてGPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいて車両の位置を測定し、カメラ44の出力信号に基づいて道路上の地物等の位置を測定する構成において、測定された車両の位置から特定される道路を示す情報や、測定された道路上の地物等の位置を示す情報を地図情報30aに追加する構成を想定する。
【0165】
この構成においては、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づく車両の位置の特定誤差が当該車両の位置の精度を示し、カメラ44の出力信号に基づく地物等の位置の特定誤差が当該地物等の位置の精度を示すとみなすことができる。従って、これらの誤差が、地図情報30aに追加された道路を示す情報や地物等の位置を示す情報の精度情報であるとみなすことが可能である。また、車両の走行頻度は車両の位置や地物等の位置の測定頻度に対応するため、当該測定頻度が、地図情報の更新頻度を示す精度情報であるとみなすことができる。
【0166】
そこで、精度情報30bにおいて、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づく車両の位置の特定誤差、カメラ44の出力信号に基づく地物等の位置の特定誤差、車両の走行頻度を精度情報に含めることとし、制御部20において実行対象プログラムに対応する要素を選択し、選択された要素の精度情報で信頼度を特定する構成とする。この構成によれば、車両の走行によって測定された道路情報や地物等の位置を示す情報の信頼度に応じて実行対象プログラムの処理内容を決定することが可能になる。また、本例においては、同じ道路に関する情報として予め地図情報30aに定義された情報と、車両の走行によって取得した情報とが併存し得るため、前者と後者の信頼度を比較し、信頼度が高い方を実行対象プログラムで利用する構成とすることも可能である。
【0167】
さらに、上述の実施形態においては、制御部20にて実行対象プログラムで利用される情報の信頼度を特定し、制御部20にて特定された信頼度と実行対象プログラムで利用される情報とを利用して当該実行対象プログラムを実行していたが、他の構成を採用しても良い。例えば、制御部20によって信頼度を特定し、特定された信頼度を示す情報を実行対象プログラムで利用される情報に対応付けて他の制御部に提供することによって当該他の制御部によって信頼度に基づく制御を実行するように構成してもよい。
【0168】
すなわち、実行対象プログラムは当該他の制御部によって実行される構成となっており、信頼度特定装置において特定された信頼度を実行対象プログラムで利用される情報に対応付けて当該他の制御部に提供することにより、当該他の制御部によって実行対象プログラムを実行する際に、信頼度に応じた制御を実行できるように構成する。この構成は、例えば、信頼度を特定する制御部20がナビゲーション装置10の制御部であり、他の制御部が車両に搭載されたブレーキ制御部である構成等によって実現可能である。
【符号の説明】
【0169】
10…ナビゲーション装置、20…制御部、21…信頼度特定プログラム、21a…実行対象プログラム特定部、21b…要素選択部、21c…信頼度特定部、22a…処理内容決定部、22…実行対象プログラム、30…記録媒体、30a…地図情報、30b…精度情報、30c…プログラム情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…カメラ、45…変速部、46…制動部、47…ユーザーI/F部
【特許請求の範囲】
【請求項1】
プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体と、
実行するプログラムを実行対象プログラムとして特定する実行対象プログラム特定手段と、
前記実行対象プログラムに対応する要素を前記複数の要素から選択する要素選択手段と、
選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する信頼度特定手段と、
を備える走行支援で利用される情報の信頼度特定装置。
【請求項2】
前記プログラムで利用される情報は、前記車両の位置を示す情報と地図情報とを含み、
前記精度情報は、
前記車両の周囲の地物と前記車両との相対関係によって特定される前記車両の位置を示す情報の精度を示す情報と、
地物に関する値を示す前記地図情報の誤差と更新頻度とを示す情報とを含む、
請求項1に記載の走行支援で利用される情報の信頼度特定装置。
【請求項3】
前記精度情報は、
前記地図情報が示す道路の不変性を示す情報を含む、
請求項2に記載の走行支援で利用される情報の信頼度特定装置。
【請求項4】
前記プログラムは当該プログラムで利用される情報の許容誤差に基づいて複数の種類に分類されており、
前記要素選択手段は、前記実行対象プログラムの種類に対応する要素を前記複数の要素から選択する、
請求項1〜請求項3のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項5】
前記複数の要素には、並列関係にある複数の要素が含まれ、
前記要素選択手段は、並列関係にある前記複数の要素のいずれかであって前記実行対象プログラムに対応する要素を選択する、
請求項1〜請求項4のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項6】
並列関係にある前記複数の要素のそれぞれには細分化された複数のサブ要素が対応づけられており、
前記要素選択手段は、並列関係にある前記複数の要素から選択された要素に対応づけられた前記サブ要素から、前記実行対象プログラムで利用される情報の特定法に応じた前記サブ要素を選択する、
請求項5に記載の走行支援で利用される情報の信頼度特定装置。
【請求項7】
前記実行対象プログラムは、特定された信頼度に基づいて処理内容を決定するプログラムである、
請求項1〜請求項6のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項8】
前記信頼度特定手段は、前記実行対象プログラムで利用される情報のそれぞれについて前記信頼度を特定し、
前記実行対象プログラムは、特定された信頼度のそれぞれを前記実行対象プログラムで利用される情報の重要度に応じて重み付け加算した加算結果に基づいて処理内容を決定するプログラムである、
請求項7に記載の走行支援で利用される情報の信頼度特定装置。
【請求項9】
前記実行対象プログラムは、前記信頼度が高いほど実行する機能の個数を多くする、
請求項7または請求項8のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項10】
実行するプログラムを実行対象プログラムとして特定する実行対象プログラム特定工程と、
プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体を参照し、前記実行対象プログラムに対応する要素を前記複数の要素から選択する要素選択工程と、
選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する信頼度特定工程と、
を備える走行支援で利用される情報の信頼度特定方法。
【請求項11】
実行するプログラムを実行対象プログラムとして特定する実行対象プログラム特定機能と、
プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体を参照し、前記実行対象プログラムに対応する要素を前記複数の要素から選択する要素選択機能と、
選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する信頼度特定機能と、
をコンピュータに実現させる走行支援で利用される情報の信頼度特定プログラム。
【請求項1】
プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体と、
実行するプログラムを実行対象プログラムとして特定する実行対象プログラム特定手段と、
前記実行対象プログラムに対応する要素を前記複数の要素から選択する要素選択手段と、
選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する信頼度特定手段と、
を備える走行支援で利用される情報の信頼度特定装置。
【請求項2】
前記プログラムで利用される情報は、前記車両の位置を示す情報と地図情報とを含み、
前記精度情報は、
前記車両の周囲の地物と前記車両との相対関係によって特定される前記車両の位置を示す情報の精度を示す情報と、
地物に関する値を示す前記地図情報の誤差と更新頻度とを示す情報とを含む、
請求項1に記載の走行支援で利用される情報の信頼度特定装置。
【請求項3】
前記精度情報は、
前記地図情報が示す道路の不変性を示す情報を含む、
請求項2に記載の走行支援で利用される情報の信頼度特定装置。
【請求項4】
前記プログラムは当該プログラムで利用される情報の許容誤差に基づいて複数の種類に分類されており、
前記要素選択手段は、前記実行対象プログラムの種類に対応する要素を前記複数の要素から選択する、
請求項1〜請求項3のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項5】
前記複数の要素には、並列関係にある複数の要素が含まれ、
前記要素選択手段は、並列関係にある前記複数の要素のいずれかであって前記実行対象プログラムに対応する要素を選択する、
請求項1〜請求項4のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項6】
並列関係にある前記複数の要素のそれぞれには細分化された複数のサブ要素が対応づけられており、
前記要素選択手段は、並列関係にある前記複数の要素から選択された要素に対応づけられた前記サブ要素から、前記実行対象プログラムで利用される情報の特定法に応じた前記サブ要素を選択する、
請求項5に記載の走行支援で利用される情報の信頼度特定装置。
【請求項7】
前記実行対象プログラムは、特定された信頼度に基づいて処理内容を決定するプログラムである、
請求項1〜請求項6のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項8】
前記信頼度特定手段は、前記実行対象プログラムで利用される情報のそれぞれについて前記信頼度を特定し、
前記実行対象プログラムは、特定された信頼度のそれぞれを前記実行対象プログラムで利用される情報の重要度に応じて重み付け加算した加算結果に基づいて処理内容を決定するプログラムである、
請求項7に記載の走行支援で利用される情報の信頼度特定装置。
【請求項9】
前記実行対象プログラムは、前記信頼度が高いほど実行する機能の個数を多くする、
請求項7または請求項8のいずれかに記載の走行支援で利用される情報の信頼度特定装置。
【請求項10】
実行するプログラムを実行対象プログラムとして特定する実行対象プログラム特定工程と、
プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体を参照し、前記実行対象プログラムに対応する要素を前記複数の要素から選択する要素選択工程と、
選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する信頼度特定工程と、
を備える走行支援で利用される情報の信頼度特定方法。
【請求項11】
実行するプログラムを実行対象プログラムとして特定する実行対象プログラム特定機能と、
プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体を参照し、前記実行対象プログラムに対応する要素を前記複数の要素から選択する要素選択機能と、
選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する信頼度特定機能と、
をコンピュータに実現させる走行支援で利用される情報の信頼度特定プログラム。
【図1】

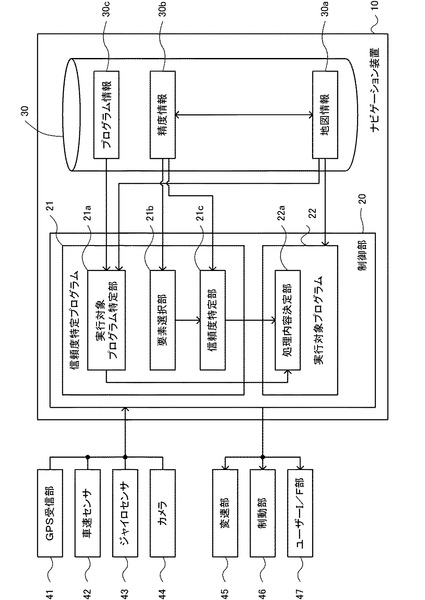
【図2】
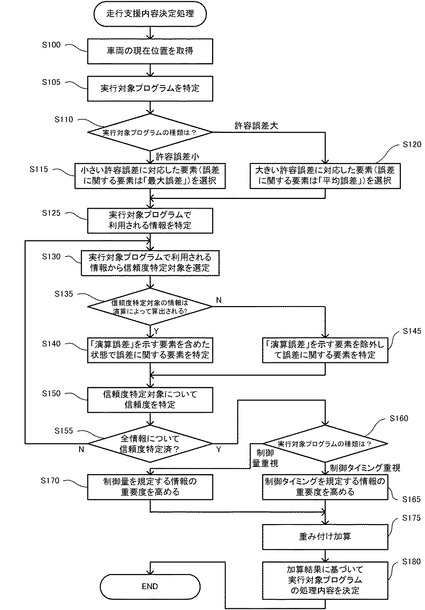
【図3】
【図4】
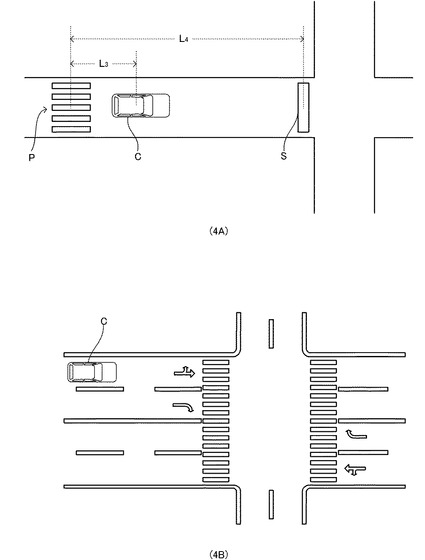
【図2】
【図3】
【図4】
【公開番号】特開2011−53194(P2011−53194A)
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2009−219211(P2009−219211)
【出願日】平成21年9月24日(2009.9.24)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成21年9月24日(2009.9.24)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]