
走行支援システムおよび車載システム
【課題】電気自動車の消費電力量を考慮して、効率的な走行を可能とする走行支援システムおよび車載システムを提供することを目的とする。
【解決手段】通信基地局3との間で無線通信を行う無線通信部11と、GPS機能を有するナビゲーション装置12と、車両の走行や電気系装置の電源となるバッテリ21の充電残量を検出するバッテリ残量検出部13と、電力量を演算する電力量演算部14と、これらの各部を制御するとともに、ナビゲーション装置12、バッテリ残量検出部13および電力量演算部14から出力される情報を、無線通信部11を介して出力し、また、無線通信部11を介して得られる情報を各部に与えるコントローラー15とを備えている。
【解決手段】通信基地局3との間で無線通信を行う無線通信部11と、GPS機能を有するナビゲーション装置12と、車両の走行や電気系装置の電源となるバッテリ21の充電残量を検出するバッテリ残量検出部13と、電力量を演算する電力量演算部14と、これらの各部を制御するとともに、ナビゲーション装置12、バッテリ残量検出部13および電力量演算部14から出力される情報を、無線通信部11を介して出力し、また、無線通信部11を介して得られる情報を各部に与えるコントローラー15とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は電気自動車の走行支援システムおよび車載システムに関する。
【背景技術】
【0002】
二次電池(バッテリ)に充電された電力を駆動源としてモータを駆動して動力を得る電気自動車は、昨今では内燃機関を駆動源としたガソリン車と比べても遜色のない性能を有しつつあるが、走行によりバッテリの充電量が減少した場合に、充電するための施設はガソリン車に対するガソリンスタンドほど普及していないのが実状である。
【0003】
家庭用の電源からもケーブルを介してバッテリの充電を行うことが可能な電気自動車も普及しているが、走行の途中で充電するには、専用の急速充電器を備えた充電施設(充電ステーション)を利用することになる。
【0004】
バッテリが完全に放電してしまわないうちに充電ステーションにたどり着かなければならないので、昨今のナビゲーション装置車には、充電ステーションの位置情報を有したものも現れつつある。
【0005】
例えば、特許文献1においては、充電ステーションの位置情報を含んだ道路地図データに基づいて、バッテリの充電を考慮した目的地までの経路を探索する構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−170293号公報(図4)
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に開示されるようなナビゲーション装置は、目的地までに充電ステーションが存在する場合には有効ではあるが、充電ステーションが普及していない段階では、目的地までに充電ステーションがない可能性も多々あり、そのような場合には役に立たない。
【0008】
本発明は上記のような問題点を解消するためになされたもので、電気自動車の消費電力量を考慮して、効率的な走行を可能とする走行支援システムおよび車載システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る走行支援システムの態様は、バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、広域通信網に接続された管理装置と、前記自動車に搭載された車載システムとを備え、前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、前記自動車は、前記車載システムを用いて、自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、前記管理装置は、前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出して前記自動車に送信し、前記車載システムは、前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う。
【発明の効果】
【0010】
本発明に係る走行支援システムの態様によれば、車載システムが、ナビゲーション装置で表示される地図画面において、予想消費電力量に基づいた表示を行うので、電気自動車の消費電力量を考慮した効率的な走行が可能となる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る実施の形態の走行支援システムの主要部の構成を示す概略図である。
【図2】データセンターの主要部の構成を示す概略図である。
【図3】車載システムの主要部の構成を示す概略図である。
【図4】車載システムの主要部の他の構成を示す概略図である。
【図5】走行支援システムの動作の一例を説明するフローチャートである。
【図6】ナビゲーション装置の表示画面に表示される、予想消費電力量が重畳された地図を示す図である。
【図7】ナビゲーション装置の表示画面に表示される、予想消費電力量が色で表示された地図を示す図である。
【図8】走行支援システムの動作の他の例を説明するフローチャートである。
【図9】ナビゲーション装置の表示画面に表示される、最小消費電力量で目的地に到達できるルートを示す図である。
【図10】走行支援システムの動作の他の例を説明するフローチャートである。
【図11】データセンターのデータベースに格納されたテーブルの一例を示す図である。
【発明を実施するための形態】
【0012】
<実施の形態>
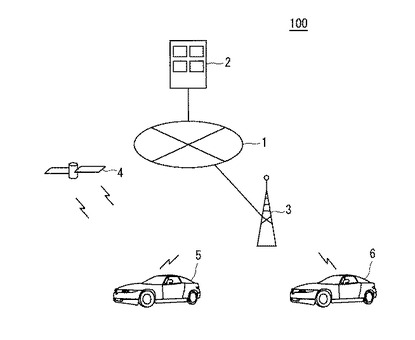
図1は、本発明に係る実施の形態の走行支援システム100の主要部の構成を示す概略図である。図1に示すように走行支援システム100は、インターネット等の広域通信網1に接続されたデータセンター2と、電気自動車5(これを走行支援を受ける自車両と呼称)および電気自動車6(これを他車両6と呼称)に搭載された車載システム(図示せず)とを備えている。
【0013】
車載システムは、データセンター2に広域通信網1を介して接続された携帯電話機等の通信基地局3との間で通信を行う通信機能を有しており、通信基地局3および広域通信網1を介してデータセンター2との間で通信を行うことができる。
【0014】
また、車載システムは、GPS(Global Positioning System)衛星4からの衛星電波に基づいて自車両の位置情報を取得するGPS機能を備えたナビゲーション装置を有している。
【0015】
<データセンターの構成>
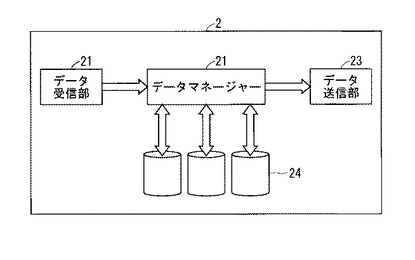
図2は、データセンター2の主要部の構成を示す概略図である。図2に示すようにデータセンター2は、電気自動車5および6を含む複数の電気自動車から送られてくる、各車両の現在位置のデータ、各車両の消費電力量のデータ等を、各車両に搭載された車載システムの通信機能により通信基地局3および広域通信網1を介して受信するデータ受信部22と、受信したデータに基づいて所定の演算処理(後に説明)や、統計処理(後に説明)を行うデータマネージャー21と、データマネージャー21で得られた演算結果や統計データを保持するとともに、それらを必要に応じて読み出すことができるデータベース24と、データマネージャー21で得られた演算結果のデータを、必要とする車両に広域通信網1および通信基地局3を介して送信するデータ送信部23とを有している。
【0016】
データ受信部22およびデータ送信部23は、それぞれ通信線(図示せず)を介してアクセスゲートウェイ等の中継装置(図示せず)との間でデータの受信および送信を行う機能を有し、通信線が光ファイバである場合は、OLT(Optical Line Terminal)がこれに該当する。また、データマネージャー21は、コンピュータシステムのCPU(Central Processing Unit)等の演算処理装置によって構成され、データベース24は、例えば、フラッシュメモリやハードディスク装置などを含むストレージ装置によって構成されている。
【0017】
なお、データセンター2には、これらの他に、VICS(Vehicle Information and Communication System/登録商標)等の交通情報提供システムから送信されるFM多重放送やビーコン(電波ビーコンまたは光ビーコン)を受信する電波受信器(図示せず)としての機能も有しており、これにより受信した交通情報は、データマネージャー21に与えられて、上述した演算処理や統計処理に利用される。
【0018】
VICSは、道路上を走行している自動車に、例えば、車両の前方の道路の混雑具合などといった情報を提供するシステムであり、当該情報はナビゲーション装置の表示画面を介してドライバーに提供されるが、走行支援システム100ではその情報をデータセンター2も取得する構成となっている。なお、走行支援システム100では、交通情報を提供するシステムであればVICSに限定されるものではなく、他のシステムを利用して交通情報を取得する構成でも良いし、複数のシステムからの交通情報を利用する構成でも良い。
【0019】
なお、データセンター2は、データを収集するだけでなく走行支援システム100全体を管理制御するので、管理装置と呼称することができる。
【0020】
<車載システムの構成>
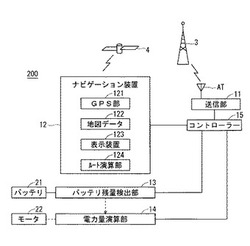
図3は、走行支援システム100を利用する各車両に搭載される車載システム200の主要部の構成を示す概略図である。図3に示すように車載システム200は、アンテナATを介して通信基地局3との間で無線通信を行う無線通信部11と、GPS機能を有するナビゲーション装置12と、車両の走行や電気系装置の電源となるバッテリ21の充電残量を検出するバッテリ残量検出部13と、電力量を演算する電力量演算部14と、これらの各部を制御するとともに、ナビゲーション装置12、バッテリ残量検出部13および電力量演算部14から出力される情報を、無線通信部11を介して出力し、また、無線通信部11を介して得られる情報を各部に与えるコントローラー15とを備えている。
【0021】
無線通信部11は、携帯電話機などの無線通信部と同じ機能を有し、通信基地局3との間で通信を行うことができるのであれば構成は特に限定されない。また、通信方式も通信基地局3で使用する通信方式に合わせれば良い。また、ナビゲーション装置12が、通信基地局3との間で通信を行う機能を有しているのであれば、その機能を利用しても良い。車載システム200は、ナビゲーション装置12を使用して構成されるものであり、ナビゲーション装置12に備わっていて、本発明の走行支援システムの実現に利用できる構成であれば利用に制約はない。
【0022】
ナビゲーション装置12は、GPS部121、地図データを格納する地図データ格納部122、液晶ディスプレイ等の表示装置123およびルート演算部124を主たる構成として有している。
【0023】
GPS部121は、GPS衛星4からの衛星電波に基づいて自車両の位置情報を取得するGPS部であり、地図データ格納部122はハードディスク装置などの記憶装置によって構成されており、ナビゲーションのための道路地図の情報を格納している。
【0024】
ルート演算部124は、CPUなどの演算処理装置によって実現され、目的地までの最短距離のルートを算出するなどの通常の機能に加え、無線通信部11により受信したデータセンター2(図1)からの演算結果のデータに基づいて、最小消費電力量で自車両が目的地に到達できるルートを算出し、表示装置123上に表示された地図に重ね合わせて表示する。
【0025】
バッテリ残量検出部13は、バッテリ21の充電状態を管理する充電管理機構に含まれ、電気自動車では、当該機構は必須のものであり、バッテリ21の充電状態の情報は、図示されない電子制御装置(ECU:Electronic Control Unit)に与えられ、例えば、運転席のインストゥルメントパネルにおいて、燃料計の代わりに充電量を表示する際に使用される。バッテリ残量検出部13は、バッテリ21の充電残量を取得し、それを用いて電力量演算部14において消費電力量を演算する。
【0026】
すなわち、バッテリ残量検出部13では、バッテリ21の充電状態を定期的に監視しており、自車両がある期間で、どの程度の電力を消費したかを検出することは容易である。逆に、坂を下る場合には回生電力が発生するので、バッテリ21の充電量が増えることとなる。従って、ある期間の前後でバッテリ21の充電残量を検出し、それらのデータの差を演算することで、消費電力量を算出することができる。
【0027】
ある期間の前で検出した充電残量より、ある期間の後で検出した充電残量が少なくなっていれば、その分がマイナス(−)の消費電力量として算出され、ある期間の前で検出した充電残量より、ある期間の後で検出した充電残量が増えていれば、その分がプラス(+)の消費電力量として算出される。
【0028】
なお、バッテリ残量検出部13では、バッテリ21の充電残量を検出するだけの構成とし、ある期間の前後でのバッテリ21の充電残量のデータを消費電力量のデータとしてデータセンター2に送り、データセンター2で両データの差を演算して、消費電力量を算出する構成としても良い。
【0029】
また、ある期間の前後でのバッテリ21の充電残量のデータを電力量演算部14に与え、電力量演算部14で両データの差を演算することで、消費電力量を算出する構成としても良い。上記何れの方法を用いた場合でも、バッテリ21の充電残量に基づいて得られる消費電力量は、信頼性の高い値となる。
【0030】
また、消費電力量を、車両が制動動作を行った際に発生する回生電力量から、車両が走行するのに費やした力行電力量を差し引いた値として定義する場合には、モータ22の駆動量から直接に力行電力量および回生電力量を取得する構成としても良い。
【0031】
すなわち、力行電力および回生電力は、車両の走行のためのモータ22の駆動によって消費および発生するので、電力量演算部14は、バッテリ残量検出部13からのバッテリ21の充電残量のデータに基づいて消費電力量を算出するのではなく、モータ22の駆動量から、ある期間での力行電力量および回生電力量を取得し、両者の差から消費電力量を算出する構成としても良い。モータ22の駆動量をモニターする機構は電気自動車には一般的に備えられているので、その機構を利用して電力量演算部14を構成することは容易である。
【0032】
また、電力量演算部14では、消費電力量を算出せず、モータ22の駆動量から力行電力量および回生電力量を取得するだけの構成とし、力行電力量および回生電力量のデータを消費電力量のデータとしてデータセンター2に送り、データセンター2で両データの差を演算して、消費電力量を算出する構成としても良い。上記何れの方法を用いた場合でも、純粋に車両の走行による消費電力量を得ることができる。
【0033】
なお、電力量演算部14独自で消費電力量を算出する場合には、バッテリ残量検出部13からのバッテリ21の充電残量のデータは不要となり、電力量演算部14はモータ22の駆動量をモニターする構成となる。
【0034】
また、この場合には、車載システム200にバッテリ残量検出部13を含まない構成としても良い。
【0035】
<車載システムの他の構成例>
図3を用いて説明した車載システム200は、コントローラー15がナビゲーション装置12を含めた車載システム200の全体を制御するものとして説明したが、コントローラー15をナビゲーション装置12とは別の構成として設けるのではなく、ナビゲーション装置12に内蔵されたナビゲーション装置12のコントローラーを使用する構成としても良い。
【0036】
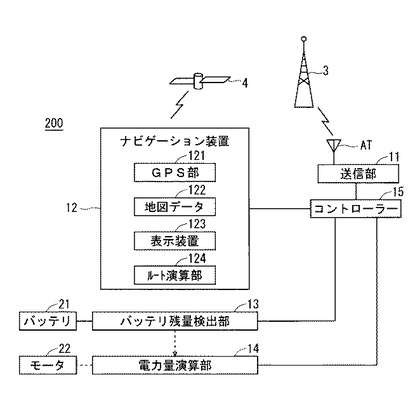
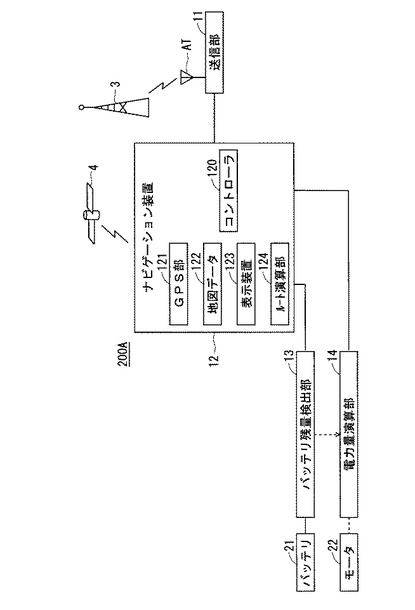
図4には、車載システム200Aとして、ナビゲーション装置12内のコントローラー120を使用する構成を示す。なお、図3に示した車載システム200と同一の構成については同一の符号を付し、重複する説明は省略する。
【0037】
図4に示すように、車載システム200Aにおいては、バッテリ残量検出部13および電力量演算部14から出力される情報はナビゲーション装置12に与えられ、無線通信部11はナビゲーション装置12に接続されている。ナビゲーション装置12では、コントローラー120が、バッテリ残量検出部13および電力量演算部14から出力される情報を、無線通信部11を介して出力し、また、無線通信部11を介して得られる情報を各部に与える構成となっている。
【0038】
ナビゲーション装置12内のコントローラー120を用いて、車載システム200Aの各部を制御することで、専用のコントローラーを設ける必要がなくなり、システムの構成を簡略化することができる。
【0039】
<走行支援システムの動作例1>
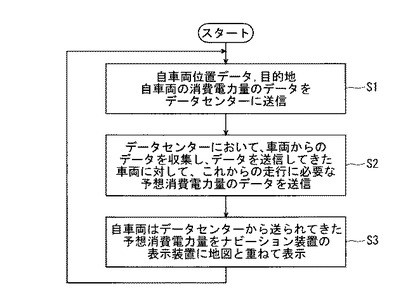
図5は、走行支援システム100の動作の一例を説明するフローチャートである。図5に示すように、走行中の自車両5(図1)は、搭載された車載システム200(車載システム200Aでも良い)を用いて、自車両の現在位置のデータを刻々とデータセンター2に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で自車両が消費した消費電力量のデータをデータセンター2に送信する(ステップS1)。このデータは、通信基地局3(図1)および広域通信網1(図1)を介してデータセンター2のデータ受信部22で受信される。
【0040】
この場合、消費電力量のデータは、バッテリ残量検出部13で取得したバッテリ21の充電残量のデータであっても良いし、バッテリ残量検出部13で取得したバッテリ21の充電残量を用いて電力量演算部14で算出した消費電力量のデータであっても良いし、あるいは電力量演算部14でモータ22の駆動量をモニターして算出した消費電力量のデータの何れであっても良い。
【0041】
また、このとき、自車両の目的地も送信する。なお、現在位置のデータは、車載システム200に含まれるナビゲーション装置12(図3、4)が、GPS衛星4からの衛星電波に基づいて取得したものを送信する。
【0042】
なお、所定位置間隔で消費電力量のデータを送信する場合とは、例えば、交差点やT字路など、道路の分岐点にさしかかるタイミングで送信する場合が考えられる。道路の分岐点ごとに消費電力量のデータを送信することで、後に説明する地図上での表示に適したデータを得ることができる。
【0043】
ここで、所定時間間隔、あるいは所定距離間隔のタイミングで消費電力量のデータがデータセンター2に送信される場合には、データセンター2において集計し、道路の分岐点ごとの消費電力量に換算すれば良い。自車両の現在位置のデータは刻々と送られて来るため、自車両の通って来た経路は判っているので、そこに所定時間間隔、あるいは所定距離間隔に送られて来る消費電力量を当てはめれば経路に対応した消費電力量となる。所定時間あるいは所定距離では道路の分岐点間に満たない場合には、複数回分のデータを集めてその平均値を取るなどして道路の分岐点ごとの消費電力量に換算することができる。
【0044】
データセンター2では、データマネージャー21が各車両から送られてきた消費電力量のデータおよび各車両の現在位置のデータを収集し、データを送信してきた車両に対して、これからの走行に必要な予想消費電力量を算出してそのデータを送信する(ステップS2)。このデータは、データ送信部23から、広域通信網1および通信基地局3を介して車載システム200の無線通信部11で受信される。
【0045】
データマネージャー21では、予想消費電力量の演算においては以下のような処理を行う。すなわち、予想消費電力量の算出対象となる車両(自車両)の目的地までの道路について、既に他車両が通って消費電力量のデータを送信してきている区間についてはその消費電力量を予想消費電力量として使用する。この場合、複数の車両から、同じ区間についての消費電力量のデータが送られてきている場合には、それらの平均値を算出して予想消費電力量とする。なお、他車両からのデータはデータベース24に格納されており、必要に応じて随時に読み出して使用する。
【0046】
また、自車両から送られてきた消費電力量のデータは、自車両がこれまでに通ってきた道路を走行するのに必要な消費電力量のデータであるので、後に、そこを通る他車両に対して予想消費電力量のデータとして提供するためにデータベース24に格納する。
【0047】
車載システム200では、データセンター2から送られてきた予想消費電力量のデータに基づいて、ナビゲーション装置12の表示装置123(図3,4)に表示される地図に、予想消費電力量の値を重ねて表示する(ステップS3)。この動作は、ナビゲーション装置12の表示装置123に、地図データを地図データ格納部122から読み出して地図として表示する制御を行う表示制御部(図示せず)に、予想消費電力量のデータを与えることで実現する。なお、予想消費電力量のデータは、地図上のどの区間での予想消費電力量かが判るように、位置情報と関連付けられて与えられる。
【0048】
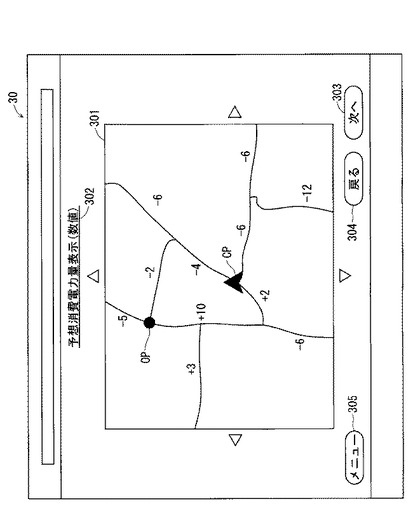
図6には、表示装置123の表示画面30に表示される、予想消費電力量が重畳された地図の一例を示している。
【0049】
図6に示すように、地図画面301においては、目的地OPまでの道路が示されており、道路を示すラインにはプラス(+)およびマイナス(−)の数値が併記されている。この数値が予想消費電力量であり、この例では、道路の分岐点間のごとに予想消費電力量が算出されている。なお、表示された数値の単位はkWhである。
【0050】
マイナスの数値は、消費される電力量が、回生により発生する電力量より多いことを示しており、プラスの数値は、消費される電力量より、回生により発生する電力量が多いことを示しており、上り坂より下り坂が多い、あるいは長い場合にはこのような値となる。
【0051】
図6において、自車両の現在位置CPは矢印で示されており、自車両はT字路にさしかかっている。この地図を利用すれば、ドライバーは、最小消費電力量で自車両が目的地に到達できるルートを選択することが可能となる。
【0052】
このため、電力を消費するだけの道路を通るルートよりも、回生電力が発生する道路を通るルートを選ぶことで効率的な走行が可能となり、目的地までに充電ステーションがない地域であっても安心して走行することが可能となる。
【0053】
図6の表示画面30では、地図画面301の下方に、画面を切り替えるためのソフトウェアキー303、304や、メニュー画面を表示するためのソフトウェアキー305が表示されており、また、地図画面301の上方には、タイトル表示部302が設けられている。なお、これらの表示は一例に過ぎない。
【0054】
また、図6では道路の分岐点間ごとに予想消費電力量が表示される例を示したが、これは一例に過ぎず、所定距離ごとに予想消費電力量を表示しても良い。
【0055】
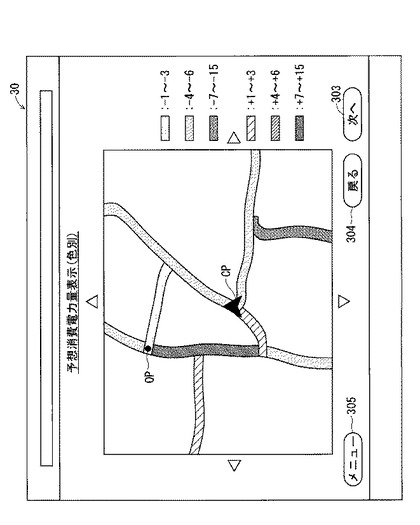
また、図6では、予想消費電力量を数値で示す例を示したが、これに限定されるものではなく予想消費電力量を色で表示するようにしても良い。図7には、予想消費電力量を色で表示する一例であり、予想消費電力量が算出された各道路について、その予想消費電力量に対応した色で塗り分けた例を示している。
【0056】
すなわち、予想消費電力量の値を幾つかの範囲に分類し、その範囲に含まれる道路については同じ色で表示する構成としている。図7の例では、予想消費電力量を−1〜−3(kWh)、−4〜−6(kWh)、−7〜−15(kWh)、+1〜+3(kWh)、+4〜+6(kWh)および+7〜+15(kWh)の6種類に分類した例を示しているがこれに限定されるものではない。
【0057】
予想消費電力量を色で表示することで、視覚的に予想消費電力量を認識することができ、予想消費電力量の少ないルートの選択が容易となる。
【0058】
なお、図6の数値表示から、図7の色別表示への変更、またはその逆の変更は、例えば、ソフトウェアキー303および304への操作で実行できる。
【0059】
また、より判りやすくするため、予想消費電力量の多いものほど暗い色(黒色や赤色)で表示し、消費電力量が少なくなり回生電力が増えるほど明るい色(黄色やオレンジ色)で表示するなどしても良い。
【0060】
また、多色を使うのではなく、単色の濃淡によって表示しても良く、予想消費電力量の多いものほど濃い色で表示し、消費電力量が少なくなり回生電力が増えるほど薄い色で表示するなどしても良く、この場合は、すっきりと見やすい表示となる。
【0061】
<走行支援システムの動作例2>
図8は、走行支援システム100の動作の他の例を説明するフローチャートである。なお、ステップS11およびステップS12の動作は、図5を用いて説明したステップS1およびステップS2の動作と同じなので説明は省略する。
【0062】
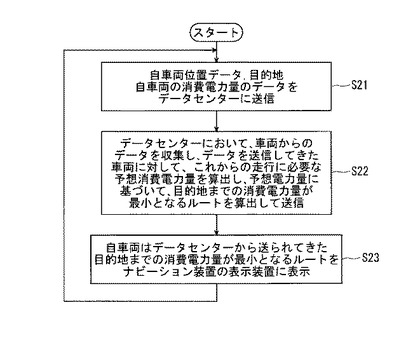
車載システム200では、データセンター2から送られてきた予想消費電力量のデータに基づいて、ナビゲーション装置12のルート演算部124が、目的地までの消費電力量が最小となるルートを算出し、ナビゲーション装置12の表示装置123(図3,4)に表示される地図に、当該ルートを重ね合わせて表示する(ステップS13)。
【0063】
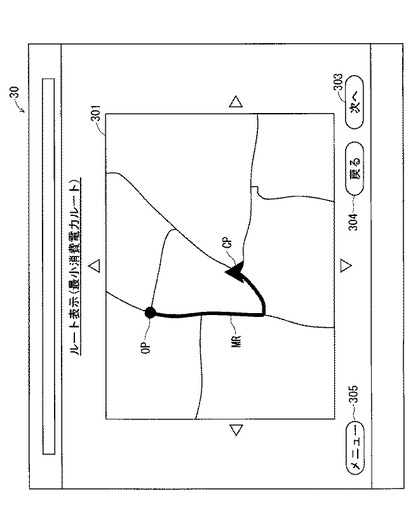
図9には、表示装置123の表示画面30に表示される、最小消費電力量で目的地に到達できるルートの表示例を示す。
【0064】
図9に示すように、地図画面301においては、最小消費電力量で目的地に到達できる最小消費電力ルートMRが太線で示されており、ドライバーが自らルートを決定する手間が省ける。ドライバーはこのルートを採ることで効率的な走行が可能となり、目的地までに充電ステーションがない地域であっても安心して走行することが可能となる。
【0065】
なお、先に説明したように、自車両のバッテリ21の充電残量はバッテリ残量検出部13が検出しているので、バッテリ21の充電残量と、最小消費電力ルートMRとを突き合わせ、充電残量で目的地に到達できるか否かを判断する機能をルート演算部124に持たせるようにしても良い。そして、充電残量で目的地に到達できない、またはその可能性があると判断された場合は、最寄りの充電ステーションに立ち寄るルートを、最小消費電力ルートMRに含めても良い。
【0066】
なお、図6の数値表示や、図7の色別表示から図9のルート表示への変更、またはその逆の変更は、例えば、ソフトウェアキー303および304への操作で実行できる。
【0067】
このように、最小消費電力ルートをナビゲーション装置12において算出する構成は、ナビゲーション装置12が、目的地までのルートを自ら算出する構成において有効である。
【0068】
<走行支援システムの動作例3>
図10は、走行支援システム100の動作の他の例を説明するフローチャートである。なお、ステップS21の動作は、図5を用いて説明したステップS1の動作と同じなので説明は省略する。
【0069】
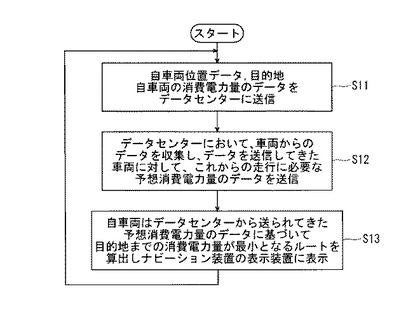
データセンター2では、データマネージャー21が各車両から送られてきた消費電力量のデータおよび各車両の現在位置のデータを収集し、データを送信してきた車両に対して、これからの走行に必要な予想消費電力量を算出し、それに基づいて、目的地までの消費電力量が最小となるルートを算出して送信する(ステップS22)。
【0070】
車載システム200では、データセンター2から送られてきた、目的地までの消費電力量が最小となるルートのデータを、ナビゲーション装置12の表示装置123(図3,4)に表示できるように処理し、表示装置123に表示される地図に、当該ルートを重ね合わせて表示する(ステップS23)。この表示は、図9に示した最小消費電力ルートMRと同じものとなる。
【0071】
なお、目的地までの消費電力量が最小となるルートのデータは、地図上のどのルートであるかが判るように、位置データとして与えられる。
【0072】
このように、最小消費電力ルートをデータセンター2で算出する構成は、ナビゲーション装置12が、目的地までのルートを自ら算出するのではなく、外部から受け取るような構成において有効である。なお、このようなナビゲーション装置12では、ルート演算部124は備えていなくても済むので、構成が簡略化される。
【0073】
<環境要因を考慮した予想消費電力量の算出>
データセンター2(図2)のデータマネージャー21(図2)では、予想消費電力量の算出に際して、各車両から送られてきた消費電力量のデータだけでなく、予想消費電力量の算出対象となる車両が置かれた環境要因も考慮して予想消費電力量を算出するようにしても良い。
【0074】
すなわち、車両における消費電力には、走行で消費される電力だけでなく、空調や前照灯で消費される電力も含んでいる。従って、車両が昼間に走行しているのか、夜間に走行しているのか、また、春夏秋冬、暑さ、寒さによっても消費電力が変わる。また、渋滞している場合には、走行に費やす時間が長くなり、その分、空調や前照灯で消費される電力量が増え、渋滞している場合とそうでない場合とでは、同じ距離であっても消費電力量が変わる。
【0075】
このように、環境要因によって消費電力量が変化するので、予想消費電力量の算出においても環境要因を考慮することで、より現実的な数値が得られる。
【0076】
ここで、データセンター2は、先に説明したようにVICS等の交通情報提供システムから送信される渋滞情報を取得するだけでなく、各地の天気情報なども取得するように構成する。
【0077】
すなわち、各車両から送られてきた消費電力量のデータと、そのときの渋滞情報、天気情報および時刻情報との突き合わせを行ってデータを統計処理し、その結果に基づいて環境情報に合わせた消費電力量を算出し、データベース24(図2)に格納しておく。
【0078】
そして、消費電力量のデータを送ってきた車両が置かれた環境情報に適合する予想消費電力量をデータベース24を読み出し、該当車両に送信する。データベース24には、区間ごとに環境情報と対応させた消費電力量が、例えば、テーブルのような形式で保存されており、消費電力量のデータを送ってきた車両が、ある区間を通る可能性がある場合には、データベース24のテーブルから、該当区間の環境要因が考慮された消費電力量を読み出して予想消費電力量として送信するようにすれば良い。
【0079】
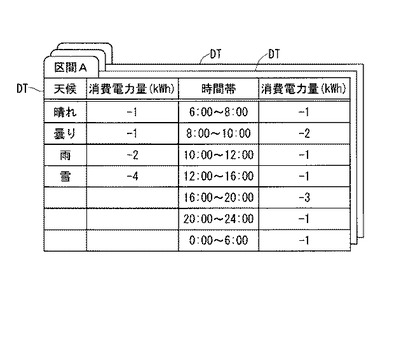
図11には、データベース24に格納されたテーブルの一例を示す。図11においては、区間Aにおける天候による消費電力量と、時間帯による消費電力量を示したテーブルDTを例示しているが、これに限定されるものではない。実際には、同じ時間帯でも、天候によって消費電力量が変わる可能性があるので、例えば、雨の日の時間帯別の消費電力量を表すなど、複数の環境情報を立体的に組み合わせたようなテーブルが考えられるが、図11では便宜的に判りやすい形式を例示している。
【0080】
図11においては、天候として、晴れ、曇り、雨および雪の場合を例示しており、雪の場合が最も消費電力量が多くなっている。これは、雪の場合は、暖房を入れる必要があり、また、雪で道路が渋滞することから、各車両から送られてきた消費電力量が多くなり、それを統計処理すると、このような値となる。
【0081】
また、図11においては、時間帯として、24時間を最小で2時間間隔、最長で4時間間隔で区分し、それぞれの時間帯での消費電力量を例示しており、16:00〜20:00の時間帯で最も消費電力量が多くなっており、8:00〜10:00の時間帯がそれに次いでいる。これは、通勤時間帯には道路が渋滞することから、空調等に費やす電力量が増え、各車両から送られてきた消費電力量が多くなり、それを統計処理すると、このような値となる。データベース24には、このように作成されたテーブルを区間ごとに有している。
【0082】
例えば、消費電力量のデータを送ってきた車両が、図11に示す区間Aを通る可能性がある場合には、データマネージャー21は、データベース24からテーブルDTを読み出し、該当車両が現在置かれている環境情報、すなわち、天候や時刻の情報と突き合わせを行い、環境情報に合致した消費電力量を読み出して予想消費電力量として送信する。
【0083】
これにより、環境要因が考慮された、より現実的な予想消費電力量を得ることができる。
【0084】
また、図11の例では、環境要因としては渋滞状況は直接には考慮されていなかったが、渋滞状況による消費電力量のテーブルを作成しても良いことは言うまでもない。先に説明したようにVICS等の交通情報提供システムから渋滞情報を取得することができるので、各車両から送られてきた消費電力量のデータと、そのときの渋滞情報との突き合わせを行ってデータを統計処理し、その結果に基づいて渋滞状況に合わせた消費電力量を算出し、データベース24に格納しておく。
【0085】
例えば、ある区間において、渋滞状況が「混雑」の場合の消費電力量や、渋滞状況が「渋滞」の場合の消費電力量を統計処理してテーブルとして格納しておく。そして、消費電力量のデータを送ってきた車両が、当該区間を通る可能性がある場合には、データマネージャー21は、データベース24から当該テーブルを読み出し、また、そのときの当該区間での渋滞情報を交通情報提供システムから取得し、両者の突き合わせを行って、渋滞状況に合致した消費電力量を読み出して予想消費電力量として送信する。
【0086】
渋滞は、消費電力量に影響を与える大きな要因となるので、これが考慮された予想消費電力量を提供することで、走行支援システム100の信頼性を高めることができる。
【0087】
なお、上記においては、渋滞状況に合わせた消費電力量を算出して、データベース24に格納しておく例を説明したが、「混雑」や「渋滞」している場合の消費電力量は、「混雑」も「渋滞」もしていない状況での消費電力量に対して所定の係数を掛けることで算出する構成としても良い。
【0088】
すなわち、ある区間において、「混雑」や「渋滞」している場合の消費電力量のデータと、「混雑」も「渋滞」もしていない状況での消費電力量のデータとが取得できれば、後者で前者を割ることで、「混雑」している場合の係数および「渋滞」している場合の係数を算出することができる。この係数を予め取得しておけば、消費電力量のデータを送ってきた車両が、当該区間を通る可能性がある場合には、データマネージャー21は、データベース24から読み出した当該区間での他車両からの消費電力量のデータ(「混雑」も「渋滞」もしていない状況でのデータ)に、上記係数を掛けることで、当該区間が「混雑」や「渋滞」している場合の消費電力量を取得することができる。
【0089】
このような方法を採ることで、渋滞状況に合わせた消費電力量をデータベース24に格納しておく必要がなくなり、データベース24の記憶容量を有効に使うことができる。
【0090】
<走行支援システムの動作例4>
なお、以上の説明においては、自車両の現在位置のデータおよび目的地をデータセンター2に送信するものとして説明したが、データセンター2には自車両の現在位置のデータのみを送信し、目的地は送信せず、データセンター2では自車両の現在位置周辺の道路について予想消費電力量を算出する構成としても良い。
【符号の説明】
【0091】
1 広域通信網、2 データセンター、3 通信基地局、5,6 電気自動車、100 走行支援システム、200,200A 車載システム。
【技術分野】
【0001】
本発明は電気自動車の走行支援システムおよび車載システムに関する。
【背景技術】
【0002】
二次電池(バッテリ)に充電された電力を駆動源としてモータを駆動して動力を得る電気自動車は、昨今では内燃機関を駆動源としたガソリン車と比べても遜色のない性能を有しつつあるが、走行によりバッテリの充電量が減少した場合に、充電するための施設はガソリン車に対するガソリンスタンドほど普及していないのが実状である。
【0003】
家庭用の電源からもケーブルを介してバッテリの充電を行うことが可能な電気自動車も普及しているが、走行の途中で充電するには、専用の急速充電器を備えた充電施設(充電ステーション)を利用することになる。
【0004】
バッテリが完全に放電してしまわないうちに充電ステーションにたどり着かなければならないので、昨今のナビゲーション装置車には、充電ステーションの位置情報を有したものも現れつつある。
【0005】
例えば、特許文献1においては、充電ステーションの位置情報を含んだ道路地図データに基づいて、バッテリの充電を考慮した目的地までの経路を探索する構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−170293号公報(図4)
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に開示されるようなナビゲーション装置は、目的地までに充電ステーションが存在する場合には有効ではあるが、充電ステーションが普及していない段階では、目的地までに充電ステーションがない可能性も多々あり、そのような場合には役に立たない。
【0008】
本発明は上記のような問題点を解消するためになされたもので、電気自動車の消費電力量を考慮して、効率的な走行を可能とする走行支援システムおよび車載システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る走行支援システムの態様は、バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、広域通信網に接続された管理装置と、前記自動車に搭載された車載システムとを備え、前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、前記自動車は、前記車載システムを用いて、自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、前記管理装置は、前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出して前記自動車に送信し、前記車載システムは、前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う。
【発明の効果】
【0010】
本発明に係る走行支援システムの態様によれば、車載システムが、ナビゲーション装置で表示される地図画面において、予想消費電力量に基づいた表示を行うので、電気自動車の消費電力量を考慮した効率的な走行が可能となる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る実施の形態の走行支援システムの主要部の構成を示す概略図である。
【図2】データセンターの主要部の構成を示す概略図である。
【図3】車載システムの主要部の構成を示す概略図である。
【図4】車載システムの主要部の他の構成を示す概略図である。
【図5】走行支援システムの動作の一例を説明するフローチャートである。
【図6】ナビゲーション装置の表示画面に表示される、予想消費電力量が重畳された地図を示す図である。
【図7】ナビゲーション装置の表示画面に表示される、予想消費電力量が色で表示された地図を示す図である。
【図8】走行支援システムの動作の他の例を説明するフローチャートである。
【図9】ナビゲーション装置の表示画面に表示される、最小消費電力量で目的地に到達できるルートを示す図である。
【図10】走行支援システムの動作の他の例を説明するフローチャートである。
【図11】データセンターのデータベースに格納されたテーブルの一例を示す図である。
【発明を実施するための形態】
【0012】
<実施の形態>
図1は、本発明に係る実施の形態の走行支援システム100の主要部の構成を示す概略図である。図1に示すように走行支援システム100は、インターネット等の広域通信網1に接続されたデータセンター2と、電気自動車5(これを走行支援を受ける自車両と呼称)および電気自動車6(これを他車両6と呼称)に搭載された車載システム(図示せず)とを備えている。
【0013】
車載システムは、データセンター2に広域通信網1を介して接続された携帯電話機等の通信基地局3との間で通信を行う通信機能を有しており、通信基地局3および広域通信網1を介してデータセンター2との間で通信を行うことができる。
【0014】
また、車載システムは、GPS(Global Positioning System)衛星4からの衛星電波に基づいて自車両の位置情報を取得するGPS機能を備えたナビゲーション装置を有している。
【0015】
<データセンターの構成>
図2は、データセンター2の主要部の構成を示す概略図である。図2に示すようにデータセンター2は、電気自動車5および6を含む複数の電気自動車から送られてくる、各車両の現在位置のデータ、各車両の消費電力量のデータ等を、各車両に搭載された車載システムの通信機能により通信基地局3および広域通信網1を介して受信するデータ受信部22と、受信したデータに基づいて所定の演算処理(後に説明)や、統計処理(後に説明)を行うデータマネージャー21と、データマネージャー21で得られた演算結果や統計データを保持するとともに、それらを必要に応じて読み出すことができるデータベース24と、データマネージャー21で得られた演算結果のデータを、必要とする車両に広域通信網1および通信基地局3を介して送信するデータ送信部23とを有している。
【0016】
データ受信部22およびデータ送信部23は、それぞれ通信線(図示せず)を介してアクセスゲートウェイ等の中継装置(図示せず)との間でデータの受信および送信を行う機能を有し、通信線が光ファイバである場合は、OLT(Optical Line Terminal)がこれに該当する。また、データマネージャー21は、コンピュータシステムのCPU(Central Processing Unit)等の演算処理装置によって構成され、データベース24は、例えば、フラッシュメモリやハードディスク装置などを含むストレージ装置によって構成されている。
【0017】
なお、データセンター2には、これらの他に、VICS(Vehicle Information and Communication System/登録商標)等の交通情報提供システムから送信されるFM多重放送やビーコン(電波ビーコンまたは光ビーコン)を受信する電波受信器(図示せず)としての機能も有しており、これにより受信した交通情報は、データマネージャー21に与えられて、上述した演算処理や統計処理に利用される。
【0018】
VICSは、道路上を走行している自動車に、例えば、車両の前方の道路の混雑具合などといった情報を提供するシステムであり、当該情報はナビゲーション装置の表示画面を介してドライバーに提供されるが、走行支援システム100ではその情報をデータセンター2も取得する構成となっている。なお、走行支援システム100では、交通情報を提供するシステムであればVICSに限定されるものではなく、他のシステムを利用して交通情報を取得する構成でも良いし、複数のシステムからの交通情報を利用する構成でも良い。
【0019】
なお、データセンター2は、データを収集するだけでなく走行支援システム100全体を管理制御するので、管理装置と呼称することができる。
【0020】
<車載システムの構成>
図3は、走行支援システム100を利用する各車両に搭載される車載システム200の主要部の構成を示す概略図である。図3に示すように車載システム200は、アンテナATを介して通信基地局3との間で無線通信を行う無線通信部11と、GPS機能を有するナビゲーション装置12と、車両の走行や電気系装置の電源となるバッテリ21の充電残量を検出するバッテリ残量検出部13と、電力量を演算する電力量演算部14と、これらの各部を制御するとともに、ナビゲーション装置12、バッテリ残量検出部13および電力量演算部14から出力される情報を、無線通信部11を介して出力し、また、無線通信部11を介して得られる情報を各部に与えるコントローラー15とを備えている。
【0021】
無線通信部11は、携帯電話機などの無線通信部と同じ機能を有し、通信基地局3との間で通信を行うことができるのであれば構成は特に限定されない。また、通信方式も通信基地局3で使用する通信方式に合わせれば良い。また、ナビゲーション装置12が、通信基地局3との間で通信を行う機能を有しているのであれば、その機能を利用しても良い。車載システム200は、ナビゲーション装置12を使用して構成されるものであり、ナビゲーション装置12に備わっていて、本発明の走行支援システムの実現に利用できる構成であれば利用に制約はない。
【0022】
ナビゲーション装置12は、GPS部121、地図データを格納する地図データ格納部122、液晶ディスプレイ等の表示装置123およびルート演算部124を主たる構成として有している。
【0023】
GPS部121は、GPS衛星4からの衛星電波に基づいて自車両の位置情報を取得するGPS部であり、地図データ格納部122はハードディスク装置などの記憶装置によって構成されており、ナビゲーションのための道路地図の情報を格納している。
【0024】
ルート演算部124は、CPUなどの演算処理装置によって実現され、目的地までの最短距離のルートを算出するなどの通常の機能に加え、無線通信部11により受信したデータセンター2(図1)からの演算結果のデータに基づいて、最小消費電力量で自車両が目的地に到達できるルートを算出し、表示装置123上に表示された地図に重ね合わせて表示する。
【0025】
バッテリ残量検出部13は、バッテリ21の充電状態を管理する充電管理機構に含まれ、電気自動車では、当該機構は必須のものであり、バッテリ21の充電状態の情報は、図示されない電子制御装置(ECU:Electronic Control Unit)に与えられ、例えば、運転席のインストゥルメントパネルにおいて、燃料計の代わりに充電量を表示する際に使用される。バッテリ残量検出部13は、バッテリ21の充電残量を取得し、それを用いて電力量演算部14において消費電力量を演算する。
【0026】
すなわち、バッテリ残量検出部13では、バッテリ21の充電状態を定期的に監視しており、自車両がある期間で、どの程度の電力を消費したかを検出することは容易である。逆に、坂を下る場合には回生電力が発生するので、バッテリ21の充電量が増えることとなる。従って、ある期間の前後でバッテリ21の充電残量を検出し、それらのデータの差を演算することで、消費電力量を算出することができる。
【0027】
ある期間の前で検出した充電残量より、ある期間の後で検出した充電残量が少なくなっていれば、その分がマイナス(−)の消費電力量として算出され、ある期間の前で検出した充電残量より、ある期間の後で検出した充電残量が増えていれば、その分がプラス(+)の消費電力量として算出される。
【0028】
なお、バッテリ残量検出部13では、バッテリ21の充電残量を検出するだけの構成とし、ある期間の前後でのバッテリ21の充電残量のデータを消費電力量のデータとしてデータセンター2に送り、データセンター2で両データの差を演算して、消費電力量を算出する構成としても良い。
【0029】
また、ある期間の前後でのバッテリ21の充電残量のデータを電力量演算部14に与え、電力量演算部14で両データの差を演算することで、消費電力量を算出する構成としても良い。上記何れの方法を用いた場合でも、バッテリ21の充電残量に基づいて得られる消費電力量は、信頼性の高い値となる。
【0030】
また、消費電力量を、車両が制動動作を行った際に発生する回生電力量から、車両が走行するのに費やした力行電力量を差し引いた値として定義する場合には、モータ22の駆動量から直接に力行電力量および回生電力量を取得する構成としても良い。
【0031】
すなわち、力行電力および回生電力は、車両の走行のためのモータ22の駆動によって消費および発生するので、電力量演算部14は、バッテリ残量検出部13からのバッテリ21の充電残量のデータに基づいて消費電力量を算出するのではなく、モータ22の駆動量から、ある期間での力行電力量および回生電力量を取得し、両者の差から消費電力量を算出する構成としても良い。モータ22の駆動量をモニターする機構は電気自動車には一般的に備えられているので、その機構を利用して電力量演算部14を構成することは容易である。
【0032】
また、電力量演算部14では、消費電力量を算出せず、モータ22の駆動量から力行電力量および回生電力量を取得するだけの構成とし、力行電力量および回生電力量のデータを消費電力量のデータとしてデータセンター2に送り、データセンター2で両データの差を演算して、消費電力量を算出する構成としても良い。上記何れの方法を用いた場合でも、純粋に車両の走行による消費電力量を得ることができる。
【0033】
なお、電力量演算部14独自で消費電力量を算出する場合には、バッテリ残量検出部13からのバッテリ21の充電残量のデータは不要となり、電力量演算部14はモータ22の駆動量をモニターする構成となる。
【0034】
また、この場合には、車載システム200にバッテリ残量検出部13を含まない構成としても良い。
【0035】
<車載システムの他の構成例>
図3を用いて説明した車載システム200は、コントローラー15がナビゲーション装置12を含めた車載システム200の全体を制御するものとして説明したが、コントローラー15をナビゲーション装置12とは別の構成として設けるのではなく、ナビゲーション装置12に内蔵されたナビゲーション装置12のコントローラーを使用する構成としても良い。
【0036】
図4には、車載システム200Aとして、ナビゲーション装置12内のコントローラー120を使用する構成を示す。なお、図3に示した車載システム200と同一の構成については同一の符号を付し、重複する説明は省略する。
【0037】
図4に示すように、車載システム200Aにおいては、バッテリ残量検出部13および電力量演算部14から出力される情報はナビゲーション装置12に与えられ、無線通信部11はナビゲーション装置12に接続されている。ナビゲーション装置12では、コントローラー120が、バッテリ残量検出部13および電力量演算部14から出力される情報を、無線通信部11を介して出力し、また、無線通信部11を介して得られる情報を各部に与える構成となっている。
【0038】
ナビゲーション装置12内のコントローラー120を用いて、車載システム200Aの各部を制御することで、専用のコントローラーを設ける必要がなくなり、システムの構成を簡略化することができる。
【0039】
<走行支援システムの動作例1>
図5は、走行支援システム100の動作の一例を説明するフローチャートである。図5に示すように、走行中の自車両5(図1)は、搭載された車載システム200(車載システム200Aでも良い)を用いて、自車両の現在位置のデータを刻々とデータセンター2に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で自車両が消費した消費電力量のデータをデータセンター2に送信する(ステップS1)。このデータは、通信基地局3(図1)および広域通信網1(図1)を介してデータセンター2のデータ受信部22で受信される。
【0040】
この場合、消費電力量のデータは、バッテリ残量検出部13で取得したバッテリ21の充電残量のデータであっても良いし、バッテリ残量検出部13で取得したバッテリ21の充電残量を用いて電力量演算部14で算出した消費電力量のデータであっても良いし、あるいは電力量演算部14でモータ22の駆動量をモニターして算出した消費電力量のデータの何れであっても良い。
【0041】
また、このとき、自車両の目的地も送信する。なお、現在位置のデータは、車載システム200に含まれるナビゲーション装置12(図3、4)が、GPS衛星4からの衛星電波に基づいて取得したものを送信する。
【0042】
なお、所定位置間隔で消費電力量のデータを送信する場合とは、例えば、交差点やT字路など、道路の分岐点にさしかかるタイミングで送信する場合が考えられる。道路の分岐点ごとに消費電力量のデータを送信することで、後に説明する地図上での表示に適したデータを得ることができる。
【0043】
ここで、所定時間間隔、あるいは所定距離間隔のタイミングで消費電力量のデータがデータセンター2に送信される場合には、データセンター2において集計し、道路の分岐点ごとの消費電力量に換算すれば良い。自車両の現在位置のデータは刻々と送られて来るため、自車両の通って来た経路は判っているので、そこに所定時間間隔、あるいは所定距離間隔に送られて来る消費電力量を当てはめれば経路に対応した消費電力量となる。所定時間あるいは所定距離では道路の分岐点間に満たない場合には、複数回分のデータを集めてその平均値を取るなどして道路の分岐点ごとの消費電力量に換算することができる。
【0044】
データセンター2では、データマネージャー21が各車両から送られてきた消費電力量のデータおよび各車両の現在位置のデータを収集し、データを送信してきた車両に対して、これからの走行に必要な予想消費電力量を算出してそのデータを送信する(ステップS2)。このデータは、データ送信部23から、広域通信網1および通信基地局3を介して車載システム200の無線通信部11で受信される。
【0045】
データマネージャー21では、予想消費電力量の演算においては以下のような処理を行う。すなわち、予想消費電力量の算出対象となる車両(自車両)の目的地までの道路について、既に他車両が通って消費電力量のデータを送信してきている区間についてはその消費電力量を予想消費電力量として使用する。この場合、複数の車両から、同じ区間についての消費電力量のデータが送られてきている場合には、それらの平均値を算出して予想消費電力量とする。なお、他車両からのデータはデータベース24に格納されており、必要に応じて随時に読み出して使用する。
【0046】
また、自車両から送られてきた消費電力量のデータは、自車両がこれまでに通ってきた道路を走行するのに必要な消費電力量のデータであるので、後に、そこを通る他車両に対して予想消費電力量のデータとして提供するためにデータベース24に格納する。
【0047】
車載システム200では、データセンター2から送られてきた予想消費電力量のデータに基づいて、ナビゲーション装置12の表示装置123(図3,4)に表示される地図に、予想消費電力量の値を重ねて表示する(ステップS3)。この動作は、ナビゲーション装置12の表示装置123に、地図データを地図データ格納部122から読み出して地図として表示する制御を行う表示制御部(図示せず)に、予想消費電力量のデータを与えることで実現する。なお、予想消費電力量のデータは、地図上のどの区間での予想消費電力量かが判るように、位置情報と関連付けられて与えられる。
【0048】
図6には、表示装置123の表示画面30に表示される、予想消費電力量が重畳された地図の一例を示している。
【0049】
図6に示すように、地図画面301においては、目的地OPまでの道路が示されており、道路を示すラインにはプラス(+)およびマイナス(−)の数値が併記されている。この数値が予想消費電力量であり、この例では、道路の分岐点間のごとに予想消費電力量が算出されている。なお、表示された数値の単位はkWhである。
【0050】
マイナスの数値は、消費される電力量が、回生により発生する電力量より多いことを示しており、プラスの数値は、消費される電力量より、回生により発生する電力量が多いことを示しており、上り坂より下り坂が多い、あるいは長い場合にはこのような値となる。
【0051】
図6において、自車両の現在位置CPは矢印で示されており、自車両はT字路にさしかかっている。この地図を利用すれば、ドライバーは、最小消費電力量で自車両が目的地に到達できるルートを選択することが可能となる。
【0052】
このため、電力を消費するだけの道路を通るルートよりも、回生電力が発生する道路を通るルートを選ぶことで効率的な走行が可能となり、目的地までに充電ステーションがない地域であっても安心して走行することが可能となる。
【0053】
図6の表示画面30では、地図画面301の下方に、画面を切り替えるためのソフトウェアキー303、304や、メニュー画面を表示するためのソフトウェアキー305が表示されており、また、地図画面301の上方には、タイトル表示部302が設けられている。なお、これらの表示は一例に過ぎない。
【0054】
また、図6では道路の分岐点間ごとに予想消費電力量が表示される例を示したが、これは一例に過ぎず、所定距離ごとに予想消費電力量を表示しても良い。
【0055】
また、図6では、予想消費電力量を数値で示す例を示したが、これに限定されるものではなく予想消費電力量を色で表示するようにしても良い。図7には、予想消費電力量を色で表示する一例であり、予想消費電力量が算出された各道路について、その予想消費電力量に対応した色で塗り分けた例を示している。
【0056】
すなわち、予想消費電力量の値を幾つかの範囲に分類し、その範囲に含まれる道路については同じ色で表示する構成としている。図7の例では、予想消費電力量を−1〜−3(kWh)、−4〜−6(kWh)、−7〜−15(kWh)、+1〜+3(kWh)、+4〜+6(kWh)および+7〜+15(kWh)の6種類に分類した例を示しているがこれに限定されるものではない。
【0057】
予想消費電力量を色で表示することで、視覚的に予想消費電力量を認識することができ、予想消費電力量の少ないルートの選択が容易となる。
【0058】
なお、図6の数値表示から、図7の色別表示への変更、またはその逆の変更は、例えば、ソフトウェアキー303および304への操作で実行できる。
【0059】
また、より判りやすくするため、予想消費電力量の多いものほど暗い色(黒色や赤色)で表示し、消費電力量が少なくなり回生電力が増えるほど明るい色(黄色やオレンジ色)で表示するなどしても良い。
【0060】
また、多色を使うのではなく、単色の濃淡によって表示しても良く、予想消費電力量の多いものほど濃い色で表示し、消費電力量が少なくなり回生電力が増えるほど薄い色で表示するなどしても良く、この場合は、すっきりと見やすい表示となる。
【0061】
<走行支援システムの動作例2>
図8は、走行支援システム100の動作の他の例を説明するフローチャートである。なお、ステップS11およびステップS12の動作は、図5を用いて説明したステップS1およびステップS2の動作と同じなので説明は省略する。
【0062】
車載システム200では、データセンター2から送られてきた予想消費電力量のデータに基づいて、ナビゲーション装置12のルート演算部124が、目的地までの消費電力量が最小となるルートを算出し、ナビゲーション装置12の表示装置123(図3,4)に表示される地図に、当該ルートを重ね合わせて表示する(ステップS13)。
【0063】
図9には、表示装置123の表示画面30に表示される、最小消費電力量で目的地に到達できるルートの表示例を示す。
【0064】
図9に示すように、地図画面301においては、最小消費電力量で目的地に到達できる最小消費電力ルートMRが太線で示されており、ドライバーが自らルートを決定する手間が省ける。ドライバーはこのルートを採ることで効率的な走行が可能となり、目的地までに充電ステーションがない地域であっても安心して走行することが可能となる。
【0065】
なお、先に説明したように、自車両のバッテリ21の充電残量はバッテリ残量検出部13が検出しているので、バッテリ21の充電残量と、最小消費電力ルートMRとを突き合わせ、充電残量で目的地に到達できるか否かを判断する機能をルート演算部124に持たせるようにしても良い。そして、充電残量で目的地に到達できない、またはその可能性があると判断された場合は、最寄りの充電ステーションに立ち寄るルートを、最小消費電力ルートMRに含めても良い。
【0066】
なお、図6の数値表示や、図7の色別表示から図9のルート表示への変更、またはその逆の変更は、例えば、ソフトウェアキー303および304への操作で実行できる。
【0067】
このように、最小消費電力ルートをナビゲーション装置12において算出する構成は、ナビゲーション装置12が、目的地までのルートを自ら算出する構成において有効である。
【0068】
<走行支援システムの動作例3>
図10は、走行支援システム100の動作の他の例を説明するフローチャートである。なお、ステップS21の動作は、図5を用いて説明したステップS1の動作と同じなので説明は省略する。
【0069】
データセンター2では、データマネージャー21が各車両から送られてきた消費電力量のデータおよび各車両の現在位置のデータを収集し、データを送信してきた車両に対して、これからの走行に必要な予想消費電力量を算出し、それに基づいて、目的地までの消費電力量が最小となるルートを算出して送信する(ステップS22)。
【0070】
車載システム200では、データセンター2から送られてきた、目的地までの消費電力量が最小となるルートのデータを、ナビゲーション装置12の表示装置123(図3,4)に表示できるように処理し、表示装置123に表示される地図に、当該ルートを重ね合わせて表示する(ステップS23)。この表示は、図9に示した最小消費電力ルートMRと同じものとなる。
【0071】
なお、目的地までの消費電力量が最小となるルートのデータは、地図上のどのルートであるかが判るように、位置データとして与えられる。
【0072】
このように、最小消費電力ルートをデータセンター2で算出する構成は、ナビゲーション装置12が、目的地までのルートを自ら算出するのではなく、外部から受け取るような構成において有効である。なお、このようなナビゲーション装置12では、ルート演算部124は備えていなくても済むので、構成が簡略化される。
【0073】
<環境要因を考慮した予想消費電力量の算出>
データセンター2(図2)のデータマネージャー21(図2)では、予想消費電力量の算出に際して、各車両から送られてきた消費電力量のデータだけでなく、予想消費電力量の算出対象となる車両が置かれた環境要因も考慮して予想消費電力量を算出するようにしても良い。
【0074】
すなわち、車両における消費電力には、走行で消費される電力だけでなく、空調や前照灯で消費される電力も含んでいる。従って、車両が昼間に走行しているのか、夜間に走行しているのか、また、春夏秋冬、暑さ、寒さによっても消費電力が変わる。また、渋滞している場合には、走行に費やす時間が長くなり、その分、空調や前照灯で消費される電力量が増え、渋滞している場合とそうでない場合とでは、同じ距離であっても消費電力量が変わる。
【0075】
このように、環境要因によって消費電力量が変化するので、予想消費電力量の算出においても環境要因を考慮することで、より現実的な数値が得られる。
【0076】
ここで、データセンター2は、先に説明したようにVICS等の交通情報提供システムから送信される渋滞情報を取得するだけでなく、各地の天気情報なども取得するように構成する。
【0077】
すなわち、各車両から送られてきた消費電力量のデータと、そのときの渋滞情報、天気情報および時刻情報との突き合わせを行ってデータを統計処理し、その結果に基づいて環境情報に合わせた消費電力量を算出し、データベース24(図2)に格納しておく。
【0078】
そして、消費電力量のデータを送ってきた車両が置かれた環境情報に適合する予想消費電力量をデータベース24を読み出し、該当車両に送信する。データベース24には、区間ごとに環境情報と対応させた消費電力量が、例えば、テーブルのような形式で保存されており、消費電力量のデータを送ってきた車両が、ある区間を通る可能性がある場合には、データベース24のテーブルから、該当区間の環境要因が考慮された消費電力量を読み出して予想消費電力量として送信するようにすれば良い。
【0079】
図11には、データベース24に格納されたテーブルの一例を示す。図11においては、区間Aにおける天候による消費電力量と、時間帯による消費電力量を示したテーブルDTを例示しているが、これに限定されるものではない。実際には、同じ時間帯でも、天候によって消費電力量が変わる可能性があるので、例えば、雨の日の時間帯別の消費電力量を表すなど、複数の環境情報を立体的に組み合わせたようなテーブルが考えられるが、図11では便宜的に判りやすい形式を例示している。
【0080】
図11においては、天候として、晴れ、曇り、雨および雪の場合を例示しており、雪の場合が最も消費電力量が多くなっている。これは、雪の場合は、暖房を入れる必要があり、また、雪で道路が渋滞することから、各車両から送られてきた消費電力量が多くなり、それを統計処理すると、このような値となる。
【0081】
また、図11においては、時間帯として、24時間を最小で2時間間隔、最長で4時間間隔で区分し、それぞれの時間帯での消費電力量を例示しており、16:00〜20:00の時間帯で最も消費電力量が多くなっており、8:00〜10:00の時間帯がそれに次いでいる。これは、通勤時間帯には道路が渋滞することから、空調等に費やす電力量が増え、各車両から送られてきた消費電力量が多くなり、それを統計処理すると、このような値となる。データベース24には、このように作成されたテーブルを区間ごとに有している。
【0082】
例えば、消費電力量のデータを送ってきた車両が、図11に示す区間Aを通る可能性がある場合には、データマネージャー21は、データベース24からテーブルDTを読み出し、該当車両が現在置かれている環境情報、すなわち、天候や時刻の情報と突き合わせを行い、環境情報に合致した消費電力量を読み出して予想消費電力量として送信する。
【0083】
これにより、環境要因が考慮された、より現実的な予想消費電力量を得ることができる。
【0084】
また、図11の例では、環境要因としては渋滞状況は直接には考慮されていなかったが、渋滞状況による消費電力量のテーブルを作成しても良いことは言うまでもない。先に説明したようにVICS等の交通情報提供システムから渋滞情報を取得することができるので、各車両から送られてきた消費電力量のデータと、そのときの渋滞情報との突き合わせを行ってデータを統計処理し、その結果に基づいて渋滞状況に合わせた消費電力量を算出し、データベース24に格納しておく。
【0085】
例えば、ある区間において、渋滞状況が「混雑」の場合の消費電力量や、渋滞状況が「渋滞」の場合の消費電力量を統計処理してテーブルとして格納しておく。そして、消費電力量のデータを送ってきた車両が、当該区間を通る可能性がある場合には、データマネージャー21は、データベース24から当該テーブルを読み出し、また、そのときの当該区間での渋滞情報を交通情報提供システムから取得し、両者の突き合わせを行って、渋滞状況に合致した消費電力量を読み出して予想消費電力量として送信する。
【0086】
渋滞は、消費電力量に影響を与える大きな要因となるので、これが考慮された予想消費電力量を提供することで、走行支援システム100の信頼性を高めることができる。
【0087】
なお、上記においては、渋滞状況に合わせた消費電力量を算出して、データベース24に格納しておく例を説明したが、「混雑」や「渋滞」している場合の消費電力量は、「混雑」も「渋滞」もしていない状況での消費電力量に対して所定の係数を掛けることで算出する構成としても良い。
【0088】
すなわち、ある区間において、「混雑」や「渋滞」している場合の消費電力量のデータと、「混雑」も「渋滞」もしていない状況での消費電力量のデータとが取得できれば、後者で前者を割ることで、「混雑」している場合の係数および「渋滞」している場合の係数を算出することができる。この係数を予め取得しておけば、消費電力量のデータを送ってきた車両が、当該区間を通る可能性がある場合には、データマネージャー21は、データベース24から読み出した当該区間での他車両からの消費電力量のデータ(「混雑」も「渋滞」もしていない状況でのデータ)に、上記係数を掛けることで、当該区間が「混雑」や「渋滞」している場合の消費電力量を取得することができる。
【0089】
このような方法を採ることで、渋滞状況に合わせた消費電力量をデータベース24に格納しておく必要がなくなり、データベース24の記憶容量を有効に使うことができる。
【0090】
<走行支援システムの動作例4>
なお、以上の説明においては、自車両の現在位置のデータおよび目的地をデータセンター2に送信するものとして説明したが、データセンター2には自車両の現在位置のデータのみを送信し、目的地は送信せず、データセンター2では自車両の現在位置周辺の道路について予想消費電力量を算出する構成としても良い。
【符号の説明】
【0091】
1 広域通信網、2 データセンター、3 通信基地局、5,6 電気自動車、100 走行支援システム、200,200A 車載システム。
【特許請求の範囲】
【請求項1】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、
広域通信網に接続された管理装置と、
前記自動車に搭載された車載システムと、を備え、
前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、
前記自動車は、
前記車載システムを用いて、自車両の現在位置のデータを前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置は、
前記自動車の現在位置周辺の道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出して前記自動車に送信し、
前記車載システムは、
前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う、走行支援システム。
【請求項2】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、
広域通信網に接続された管理装置と、
前記自動車に搭載された車載システムと、を備え、
前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、
前記自動車は、
前記車載システムを用いて、自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置は、
前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出して前記自動車に送信し、
前記車載システムは、
前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う、走行支援システム。
【請求項3】
前記車載システムは、
前記地図画面において、前記予想消費電力量の値を該当する道路に併記して表示する、請求項1または請求項2記載の走行支援システム。
【請求項4】
前記車載システムは、
前記地図画面において、前記予想消費電力量を色で区別し、該当する道路を前記予想消費電力量に対応した色で塗り分けるように表示する、請求項1または請求項2記載の走行支援システム。
【請求項5】
前記車載システムは、
前記予想消費電力量に基づいて、前記目的地までの消費電力量が最小となる最小消費電力ルートを算出し、前記地図画面において前記最小消費電力ルートを表示する、請求項2記載の走行支援システム。
【請求項6】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、
広域通信網に接続された管理装置と、
前記自動車に搭載された車載システムと、を備え、
前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、
前記自動車は、
前記車載システムを用いて、自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置は、
前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出し、該予想消費電力量に基づいて、前記自動車の前記目的地までの消費電力量が最小となる最小消費電力ルートを算出して前記自動車に送信し、
前記車載システムは、
前記ナビゲーション装置で表示される地図画面において、前記最小消費電力ルートを表示する、走行支援システム。
【請求項7】
前記車載システムは、
前記バッテリの充電残量を検出するバッテリ残量検出部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行した前後での前記バッテリの充電残量の差、および前記所定位置に達するまでの走行の前後での前記バッテリの充電残量の差の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項8】
前記車載システムは、
前記バッテリの充電残量を検出するバッテリ残量検出部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行した前後での前記バッテリの充電残量の値、および前記所定位置に達するまでの走行の前後での前記バッテリの充電残量の値の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項9】
前記車載システムは、
前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行して検出された前記回生電力量と前記力行電力量との差、および前記所定位置に達するまで走行して検出された前記回生電力量と前記力行電力量との差の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項10】
前記車載システムは、
前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行して検出された前記回生電力量および前記力行電力量の値、および前記所定位置に達するまで走行して検出された前記回生電力量および前記力行電力量の値の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項11】
前記管理装置は、
前記自動車が置かれた渋滞状況、天気状況および時刻状況の少なくとも1つを含む環境要因による変化を含むように、前記予想消費電力量を算出する、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項12】
前記管理装置は、
予め収集した、前記他車両が送信してきた前記消費電力量のデータを、前記天気状況および前記時刻状況の少なくとも一方と対応させて記憶し、前記予想消費電力量の算出に際しては、前記自動車が置かれた前記天気状況および前記時刻状況の少なくとも一方と合致する前記消費電力量のデータを読み出し、前記予想消費電力量とする、請求項11記載の走行支援システム。
【請求項13】
前記管理装置は、
予め収集した、前記他車両が送信してきた前記消費電力量のデータを、前記渋滞状況と対応させて処理することで、前記渋滞状況に応じた係数を取得し、前記予想消費電力量の算出に際しては、前記自動車が置かれた前記渋滞状況に応じた前記係数を前記他車両が送信してきた前記消費電力量のデータに掛けることで、前記予想消費電力量を得る、請求項
11記載の走行支援システム。
【請求項14】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車に搭載された車載システムであって、
GPS(Global Positioning System)機能を備えたナビゲーション装置と、
広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部と、
前記バッテリの充電残量を検出するバッテリ残量検出部および前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部の少なくとも一方と、を有し、
前記広域通信網に接続された管理装置との間で、前記通信基地局および前記広域通信網を介して通信を行い、
前記車載システムは、
自車両の現在位置のデータを前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置が、前記自動車の現在位置周辺の道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出してデータとして送信するのを受け、前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う、車載システム。
【請求項15】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車に搭載された車載システムであって、
GPS(Global Positioning System)機能を備えたナビゲーション装置と、
広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部と、
前記バッテリの充電残量を検出するバッテリ残量検出部および前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部の少なくとも一方と、を有し、
前記広域通信網に接続された管理装置との間で、前記通信基地局および前記広域通信網を介して通信を行い、
前記車載システムは、
自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置が、前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出し、該予想消費電力量に基づいて、前記自動車の前記目的地までの消費電力量が最小となる最小消費電力ルートを算出してデータとして送信するのを受け、前記ナビゲーション装置で表示される地図画面において、前記最小消費電力ルートを表示する、車載システム。
【請求項1】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、
広域通信網に接続された管理装置と、
前記自動車に搭載された車載システムと、を備え、
前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、
前記自動車は、
前記車載システムを用いて、自車両の現在位置のデータを前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置は、
前記自動車の現在位置周辺の道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出して前記自動車に送信し、
前記車載システムは、
前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う、走行支援システム。
【請求項2】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、
広域通信網に接続された管理装置と、
前記自動車に搭載された車載システムと、を備え、
前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、
前記自動車は、
前記車載システムを用いて、自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置は、
前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出して前記自動車に送信し、
前記車載システムは、
前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う、走行支援システム。
【請求項3】
前記車載システムは、
前記地図画面において、前記予想消費電力量の値を該当する道路に併記して表示する、請求項1または請求項2記載の走行支援システム。
【請求項4】
前記車載システムは、
前記地図画面において、前記予想消費電力量を色で区別し、該当する道路を前記予想消費電力量に対応した色で塗り分けるように表示する、請求項1または請求項2記載の走行支援システム。
【請求項5】
前記車載システムは、
前記予想消費電力量に基づいて、前記目的地までの消費電力量が最小となる最小消費電力ルートを算出し、前記地図画面において前記最小消費電力ルートを表示する、請求項2記載の走行支援システム。
【請求項6】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車の走行支援システムであって、
広域通信網に接続された管理装置と、
前記自動車に搭載された車載システムと、を備え、
前記車載システムは、GPS(Global Positioning System)機能を備えたナビゲーション装置と、前記管理装置に前記広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部とを有し、前記通信基地局および前記広域通信網を介して前記管理装置との間で通信を行い、
前記自動車は、
前記車載システムを用いて、自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置は、
前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出し、該予想消費電力量に基づいて、前記自動車の前記目的地までの消費電力量が最小となる最小消費電力ルートを算出して前記自動車に送信し、
前記車載システムは、
前記ナビゲーション装置で表示される地図画面において、前記最小消費電力ルートを表示する、走行支援システム。
【請求項7】
前記車載システムは、
前記バッテリの充電残量を検出するバッテリ残量検出部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行した前後での前記バッテリの充電残量の差、および前記所定位置に達するまでの走行の前後での前記バッテリの充電残量の差の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項8】
前記車載システムは、
前記バッテリの充電残量を検出するバッテリ残量検出部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行した前後での前記バッテリの充電残量の値、および前記所定位置に達するまでの走行の前後での前記バッテリの充電残量の値の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項9】
前記車載システムは、
前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行して検出された前記回生電力量と前記力行電力量との差、および前記所定位置に達するまで走行して検出された前記回生電力量と前記力行電力量との差の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項10】
前記車載システムは、
前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部を有し、
前記車載システムは、
前記所定時間、前記所定距離を走行して検出された前記回生電力量および前記力行電力量の値、および前記所定位置に達するまで走行して検出された前記回生電力量および前記力行電力量の値の何れかを前記消費電力量とする、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項11】
前記管理装置は、
前記自動車が置かれた渋滞状況、天気状況および時刻状況の少なくとも1つを含む環境要因による変化を含むように、前記予想消費電力量を算出する、請求項1、請求項2および請求項6の何れか1項に記載の走行支援システム。
【請求項12】
前記管理装置は、
予め収集した、前記他車両が送信してきた前記消費電力量のデータを、前記天気状況および前記時刻状況の少なくとも一方と対応させて記憶し、前記予想消費電力量の算出に際しては、前記自動車が置かれた前記天気状況および前記時刻状況の少なくとも一方と合致する前記消費電力量のデータを読み出し、前記予想消費電力量とする、請求項11記載の走行支援システム。
【請求項13】
前記管理装置は、
予め収集した、前記他車両が送信してきた前記消費電力量のデータを、前記渋滞状況と対応させて処理することで、前記渋滞状況に応じた係数を取得し、前記予想消費電力量の算出に際しては、前記自動車が置かれた前記渋滞状況に応じた前記係数を前記他車両が送信してきた前記消費電力量のデータに掛けることで、前記予想消費電力量を得る、請求項
11記載の走行支援システム。
【請求項14】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車に搭載された車載システムであって、
GPS(Global Positioning System)機能を備えたナビゲーション装置と、
広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部と、
前記バッテリの充電残量を検出するバッテリ残量検出部および前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部の少なくとも一方と、を有し、
前記広域通信網に接続された管理装置との間で、前記通信基地局および前記広域通信網を介して通信を行い、
前記車載システムは、
自車両の現在位置のデータを前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置が、前記自動車の現在位置周辺の道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出してデータとして送信するのを受け、前記ナビゲーション装置で表示される地図画面において、前記予想消費電力量に基づいた表示を行う、車載システム。
【請求項15】
バッテリに充電された電力を駆動源としてモータを駆動して走行する自動車に搭載された車載システムであって、
GPS(Global Positioning System)機能を備えたナビゲーション装置と、
広域通信網を介して接続された通信基地局との間で無線通信を行う無線通信部と、
前記バッテリの充電残量を検出するバッテリ残量検出部および前記モータの駆動量から、力行電力量および回生電力量を検出する電力量演算部の少なくとも一方と、を有し、
前記広域通信網に接続された管理装置との間で、前記通信基地局および前記広域通信網を介して通信を行い、
前記車載システムは、
自車両の現在位置のデータ、目的地を前記管理装置に送信するとともに、所定時間間隔、所定距離間隔、および所定位置間隔の何れかのタイミングで、その間隔で前記自車両が消費した消費電力量のデータを前記管理装置に送信し、
前記管理装置が、前記自動車の前記目的地までの道路について、予め収集した、前記道路を走行した他車両が送信してきた前記消費電力量のデータに基づいて、前記自動車が前記道路を走行する際の予想消費電力量を算出し、該予想消費電力量に基づいて、前記自動車の前記目的地までの消費電力量が最小となる最小消費電力ルートを算出してデータとして送信するのを受け、前記ナビゲーション装置で表示される地図画面において、前記最小消費電力ルートを表示する、車載システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−189466(P2012−189466A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−53751(P2011−53751)
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]