
走行支援装置、方法およびプログラム
【課題】汎用的な情報を用いて交差点での車列の発生を防止するための技術が必要とされていた。
【解決手段】自車両の運転者の停止意志を検出し、前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得し、前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定し、前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定し、前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う。
【解決手段】自車両の運転者の停止意志を検出し、前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得し、前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定し、前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定し、前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対向車線上での車列の発生を予防するための案内を行う走行支援装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、自車両が走行する走行車線の対向車線から、他車両が走行車線を横切って当該走行車線に接続する接続道路に対して進入する際に、対向車線上で他車両の後続車両が車列を形成することを防止する技術が知られている。例えば、特許文献1においては、走行車線と接続道路との接続位置に対応する交差点において、対向車線から接続道路に進入した車両台数を示す交通情報を取得し、当該交通情報に基づいて自車両の走行車線を他車両が横切る可能性を特定する。そして、当該横切る可能性が高いときには交差点の手前で停止するように警告する。
【特許文献1】特開2007−310745号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の技術においては、自車両の走行車線を他車両が横切る可能性が高い交差点について案内するために、当該交差点についての交通情報を取得している。従って、交差点毎の交通状態に応じて自車両の走行車線を他車両が横切る可能性を正確に判別することが可能である。しかし、対向車線から接続道路に進入する他車両の情報を正確に収集するのは困難であるため、従来の技術に加え、より汎用的な情報を用いて交差点での車列の発生を防止するための技術も必要とされていた。
本発明は、上記課題に鑑みてなされたものであり、多くの場面で取得可能な汎用的な情報に基づいて車列の発生を防止するための案内を行う技術を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記の目的を達成するため、本発明においては、自車両の運転者の停止意志を検出した場合に、自車両の前方において接続道路が走行車線に接続する接続位置を取得する。そして、当該接続位置において、他車両が対向車線から走行車線を横切って前記接続道路へ進入することが可能であり、自車両が接続位置で停止することによって対向車線上に車両が停滞し、当該停滞する車両の後方に後続車両の車列(以下単に車列とも呼ぶ)が発生し得ると、車両通行量に基づいて判定される場合に、接続位置における自車両の停止を防止するための案内を行う。
【0005】
すなわち、本発明においては、地図情報と対向車線上の車両通行量とに基づいて接続位置において対向車線上に車列が発生し得るか否かを判定している。ここで、対向車線上の車両通行量は車線上での車両の通行量を示しており、特定の位置のみについての車両通行量を示すものではない。すなわち、少なくともある一定の区間における車両通行量を評価するための指標に基づいて接続位置において車列が発生し得るか否かを判定する。従って、比較的汎用的な情報に基づいて車列が発生し得るか否かを判定することができる。
【0006】
ここで、地図情報は車両が走行する道路やその周辺の道路を特定するための情報であればよく、道路同士の接続関係や道路の形状、道路上の地物、車線の方向など、道路に関する各種の情報を含み得る。停止意志検出手段は、自車両の運転者の停止意志を検出することができれば良く、例えば、自車両を停止させるための減速動作が行われている場合に停止意志があるとみなす構成等を採用可能である。
【0007】
接続位置取得手段は、自車両の前方の接続位置を取得することができればよい。従って、停止意志に応じて自車両が停止する停止位置を推定し、推定された停止位置の周辺(停止位置から所定範囲内の位置)に接続位置が存在する場合にその接続位置を取得する構成としてもよいし、停止意志に応じて自車両が停止し得る区間を特定し、当該区間内の複数の箇所で他の接続道路が走行車線に接続される場合に各接続道路の接続位置を取得する構成としてもよい。後者は、停止意志に応じた自車両の停止位置を正確に特定することが困難である場合に好適な構成である。なお、接続位置は、自車両の走行車線に接続道路が接続される位置に対応していれば良く、走行車線上の位置であっても良いし、走行車線が存在する道路上の位置であっても良い。例えば、接続道路の延長線と走行車線との交点や、接続道路と走行車線が存在する道路との交差点に相当する位置であっても良い。
【0008】
進入可否判定手段は、接続位置において、他車両が対向車線から走行車線を横切って接続道路へ進入可能であるか否かを判定することができればよく、地図情報が示す道路の情報から各道路上での進行方向、各道路の接続関係を特定して他車両が走行車線を横切り、かつ、接続道路へ進入する方向へ走行可能であるか否かを判定すればよい。
【0009】
車列発生判定手段は、自車両が前記接続位置で停止して、対向車線から接続道路へ向かう車両の走行を妨げ得る状況において車列が発生し得るか否かを当該対向車線上の車両通行量に基づいて判定することができればよい。すなわち、車両が接続道路へ進入することが可能な接続位置に自車両が停止すると、車両が対向車線から自車両の走行車線を横切って接続道路に進入することを妨げるため、当該車両が停滞する。しかし、車両通行量が少ない場合には対向車線上に車両が停滞しても当該対向車線上の後続車両の流れが妨げられにくく、対向車線において車列は発生しにくい。一方、車両通行量が多い場合には、対向車線上に車両が停滞することによって対向車線上の車両の流れが妨げられて対向車線上に車列が発生し得る。そこで、車両通行量に基づいて車列が発生し得るか否かを判定する構成とする。
【0010】
ここで、判断指標として用いる車両通行量は、対向車線上の車両の通行量であるため、接続位置に関する情報に限定されずより広い範囲についての車両通行量を示す情報である。例えば、接続位置を含む区間における対向車線上の車両通行量を示す情報を利用して車列が発生し得るか否か判定する構成を採用可能である。また、車両交通量を示す情報は、当該現在時刻における車両交通量を測定した情報であってもよいし、対向車線上の車両の走行履歴に基づいて予め時間帯毎に特定された車両交通量の傾向を示す情報であってもよい。前者としては、プローブ情報やVICS情報(VICSは登録商標)によって特定される渋滞情報等が挙げられる。
【0011】
さらに、案内手段においては、接続位置における自車両の停止を防止するための案内を行うことができればよく、接続道路の接続位置に停止することで車列が発生し得ることを案内してもよいし、車列が発生し得る接続位置の存在を案内してもよく種々の構成を採用可能である。むろん、車列が発生し得る接続位置が複数個存在するのであれば、各地点について案内を行えばよい。
【0012】
さらに、車両の通行量に応じて案内の内容を変えてもよい。例えば、車両通行量が多いほど接続位置での停止に対して強い警告を行うなど、対向車線上の車両通行量に応じて案内の内容を決定する構成としてもよい。この構成によれば、車列の発生を効果的に防止するための案内を車両通行量に応じて適切に決定することができる。
【0013】
さらに、地図情報に道路上のノードの位置と各道路上の車線の進行方向、車線間の中央分離帯の有無を示す情報を記録する構成において、当該地図情報に基づいて、接続位置において、接続道路の延長線上に対向車線から走行車線への進入を防止する中央分離帯が存在するか否かを判定し、中央分離帯が存在しない場合に接続道路へ進入することが可能であると判定する構成を採用可能である。この構成によれば、対向車線から他車両が接続道路に進入し得ない状況を確実に除外することが可能である。
【0014】
さらに、進入可否を判定するにあたり、接続道路の属性を判定指標にしてもよい。例えば、接続道路の一端に走行車線が接続され、他端に店舗が存在する場合、接続道路に進入可能であるか否かが店舗の営業時間に依存する場合がある。そこで、接続道路が店舗への誘導路であるとともに現在時刻が店舗の営業時間内である場合に、接続道路へ進入することが可能である構成とすれば、他車両が接続道路に進入し得ない状況を確実に除外することが可能である。
【0015】
なお、本発明のように、地図情報と対向車線上の車両通行量とに基づいて接続位置にて車列が発生し得るか否かを判定する手法は、この処理を行う方法やプログラムとしても適用可能である。また、以上のような走行支援装置、方法、プログラムは、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあれば、車両に搭載されない各部と連携して実現される場合もあり、各種の態様を含むものである。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、走行支援装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【発明を実施するための最良の形態】
【0016】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)走行支援装置の構成:
(2)走行支援処理:
(3)他の実施形態:
【0017】
(1)走行支援装置の構成:
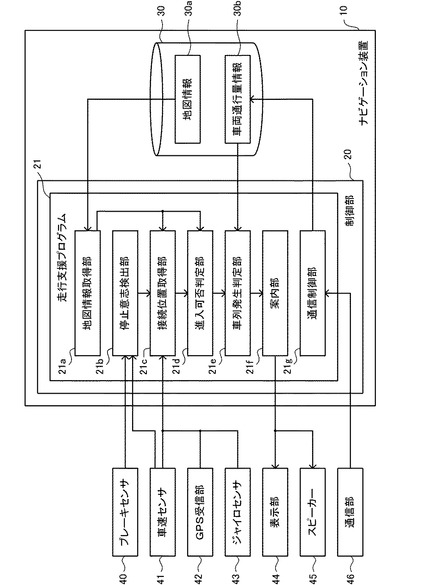
図1は、自車両に搭載された走行支援装置の構成を示すブロック図である。本実施形態において走行支援装置は、ナビゲーション装置10によって実現される。ナビゲーション装置10は、CPU、RAM、ROM等を備える制御部20と記憶媒体30とを備えており、記憶媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとして走行支援プログラム21を実行可能である。
【0018】
自車両には、走行支援プログラム21によって、自車量の対向車線上に車列を発生させることを防止する処理を行うために、ブレーキセンサ40と車速センサ41とGPS受信部42とジャイロセンサ43と表示部44とスピーカー45と通信部46とが備えられている。ブレーキセンサ40は、自車両に搭載された制動部にて制動力を発生させるためのペダル操作を検出するためのセンサである。制御部20は、図示しないインタフェースを介して当該ブレーキセンサ40の出力信号を取得し、当該出力信号に基づいて自車両にて減速動作が行われていることを判定する。むろん、減速動作が行われていることは他のセンサ、例えば、スロットルセンサ等を組み合わせて判定してもよい。
【0019】
車速センサ41は、自車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、自車両の速度を取得する。ジャイロセンサ43は、自車両の水平面内の旋回についての角加速度を検出し、自車両の向きに対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、自車両の進行方向を取得する。GPS受信部42は、GPS衛星からの電波を受信し、図示しないインタフェースを介して自車両の現在位置を算出するための信号や現在時刻を示す信号を出力する。制御部20は、この信号を取得して自車両の現在位置および現在時刻を取得する。車速センサ41およびジャイロセンサ43は、GPS受信部42の出力信号から特定される自車両の現在位置を補正するためなどに利用される。
【0020】
また、制御部20は、所定の出力を表示部44およびスピーカー45に対して出力して当該表示部44にて任意の画像を表示させ、スピーカー45にて任意の音声を出力させる。本実施形態において制御部20は、後述する地図情報30aに登録された道路によって地図を構成して表示部44上に地図を表示させるとともに、対向車線上に車列が発生し得る場合には車列の発生を防止させるための案内を表示させる。
【0021】
通信部46は、図示しない外部の車両通行量情報の管理センターと無線通信を行う回路を備えており、制御部20は、通信部46を制御して車両通行量情報の管理センターから送信される車両通行量情報30bを取得して後述する記憶媒体30に記録する。
【0022】
制御部20は、走行支援プログラム21を実行することにより、車列の発生を防止するための案内を行う。このため、走行支援プログラム21は、地図情報取得部21aと停止意志検出部21bと接続位置取得部21cと進入可否判定部21dと車列発生判定部21eと案内部21fと通信制御部21gとを備えている。また、記憶媒体30には予め地図情報30aが記憶され、通信部46を介して車両通行量情報30bを取得したときには記憶媒体には当該車両通行量情報30bが記録される。
【0023】
地図情報30aは、自車両が走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間点データ、ノード同士の連結を示すリンクデータ、各道路上の車線および各車線上での車両の進行方向を示すデータ、道路上の地物(中央分離帯等)を示すデータ、道路周辺に存在する店舗等の施設を示すデータ等を含み、自車両の現在位置から目的地までの経路の探索や経路案内等に利用される。なお、道路はノードデータおよびリンクデータによって特定することができる。すなわち、本実施形態においては、道路の交差点の中央に相当する位置にノードが設定され、ノードデータにその位置が対応づけられている。また、リンクデータによって連結されているノード間には道路が存在することを示している。従って、地図情報30aとして記録されているノードデータとリンクデータとによって各道路が延びる方向と各道路の接続関係とを特定することができる。また、車線上での車両の進行方向や道路上の地物を示す情報によって車両によって走行可能な経路を特定可能である。なお、施設を示すデータにおいては、店舗の位置および店舗の営業時間を示す情報が含まれる。
【0024】
車両通行量情報30bは、道路上の車両通行量を示す情報であり、少なくとも自車両が走行する走行車線の対向車線上の車両通行量を示す情報を特定できればよい。従って、例えば、道路上の車両通行量を進行方向別に示す情報を道路区間毎に取得し、自車両が走行している道路区間において自車両の走行車線と逆向きの進行方向となっている対向車線について車両通行量を取得するように構成すればよい。なお、車両通行量は各種の態様によって表現可能であり、単位時間当たりに通行する車両の数や渋滞度を示す情報等によって車両通行量情報を構成可能である。より具体的には、プローブ情報やVICS情報とうによって構成可能である。ここでは、車両通行量が渋滞度を示す情報であり、「空き、混雑、渋滞」の順に車両の量が多くなることを示す情報であるとして本実施形態を説明する。
【0025】
地図情報取得部21aは、記憶媒体30から地図情報30aとして登録された各種情報を適宜取得する機能を制御部20に実現させるモジュールであり、制御部20は当該地図情報取得部21aの処理によって自車両の前方の道路を示す情報を取得する。停止意志検出部21bは、自車両の運転者の停止意志を検出する機能を制御部20に実現させるモジュールであり、制御部20は、ブレーキセンサ40の出力信号および車速センサ41の出力信号を取得し、自車両の車速が所定値以下となった状態でブレーキによる減速動作がなされたときに停止意志があったことを検出する。
【0026】
接続位置取得部21cは、停止意志を検出した場合に、自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、上述のようにして取得された地図情報30aを参照し、自車両が走行する走行車線を特定するとともに当該走行車線における自車両の前方の所定範囲に当該走行車線から延びる他の接続道路が接続されているか否かを判定する。そして、接続道路が検出されたときには当該接続道路と走行車線との交差点の位置(交差点に相当するノードが示す位置)を接続位置として取得する。なお、接続位置は交差点の位置に限定されず、走行車線上の位置であっても良い。例えば、走行車線毎にノードやリンクが設定されている地図情報を参照し、接続道路の延長線と走行車線との交点を走行車線毎のノードおよびリンクと接続道路のノードおよびリンクとに基づいて特定しても良い。また、ノードやリンクを利用しないで接続道路が走行車線に接続される位置を特定することも可能である。例えば、道路の周辺に存在する地物(施設等)の位置を示す情報を含む地図情報を参照し、地物の位置から走行車線あるいは走行車線が存在する道路に向かって延びる垂線を想定し、当該垂線と走行車線あるいは走行車線が存在する道路との交点を接続道路の接続位置とする構成を採用可能である。
【0027】
進入可否判定部21dは、接続位置において他車両が対向車線から走行車線を横切って接続道路へ進入することが可能であるか否かを判定する機能を制御部20に実現させるモジュールである。本実施形態において、接続道路に対する進入可否は、地図情報30a(すなわち、予め決められた道路や道路周辺の情報)に基づいて特定される。
【0028】
具体的には、まず、制御部20が、上述のようにして取得された地図情報30aを参照し、接続道路の延長線上(上述の接続位置に相当する交差点の中央部分)に、対向車線から走行車線への進入を防止する中央分離帯が存在するか否かを判定する。当該中央分離帯が存在しない場合、さらに、接続道路の種類に応じた判別を行う。すなわち、制御部20は、地図情報30aを参照して接続位置と逆側の接続道路の端部に店舗が存在するか否かを判定することによって、接続道路が店舗への誘導路であるか否かを判定する。
【0029】
接続道路が店舗への誘導路である場合には図示しない計時回路に基づいて現在時刻を特定し、地図情報30aを参照して現在時刻が当該店舗の営業時間内であるか否かを判定する。そして、現在時刻が当該店舗の営業時間内であると判定されたときに他車両が接続道路へ進入可能であると判定する。
【0030】
一方、接続道路が店舗への誘導路でない場合(接続位置と逆側の接続道路の端部に道路が接続されている場合)には、地図情報30aを参照して接続道路上で車両に許可された進行方向を特定することによって他車両が接続道路へ進入可能であるか否かを判定する。すなわち、接続道路が接続道路から走行車線への一方通行でない場合(双方向通行道路あるいは走行車線側から接続道路への一方通行である場合)に他車両が接続道路へ進入可能であると判定する。
【0031】
車列発生判定部21eは、他車両が接続道路に進入可能である場合に、自車両が接続位置で停止して対向車線上に車両が停滞することにより、対向車線上に停滞する車両の後続車両による車列が発生し得るか否かを判定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、車両通行量情報30bを取得して、自車両が走行する走行車線に対する対向車線上の車両通行量を特定し、当該車両通行量が所定以上である場合に車列が発生し得ると判定する。本実施形態においては、車両通行量が「混雑」あるいは「渋滞」であるときに車列が発生し得ると判定する。
【0032】
案内部21fは、車列が発生し得ると判定された場合に、接続位置における自車両の停止を防止するための案内を行う機能を制御部20に実現させるモジュールである。すなわち、制御部20は、表示部44およびスピーカー45に対して制御信号を出力して、接続位置に停止すると対向車線上に車列を発生させてしまう旨の案内を行う。本実施形態においては、車両通行量に応じて案内の内容を変更する決定する構成としており、車両通行量が多いほど警告の度合いを強くする。本実施形態においては、車両通行量が「渋滞」である場合には接続位置での停止を行わないように表示部44に警告を表示させるとともにスピーカー45から警告音を出力させ、車両通行量が「混雑」である場合には接続位置で停止しないことが推奨される旨の案内を表示部44に表示させる構成等を採用可能である。
【0033】
通信制御部21gは、通信部46を介して車両通行量情報30bを受信する機能を制御部20に実現させるモジュールであり、制御部20は所定のタイミングで車両通行量情報の管理センターと通信を行って車両通行量情報30bを取得し、記録媒体30に記録する。
【0034】
以上の構成においては、地図情報と対向車線上の車両通行量とに基づいて接続位置において対向車線上に車列が発生し得るか否かを判定している。本実施形態における車両通行量は道路区間上の渋滞度を車線毎に示す情報であり、交差点など特定の位置よりも広い区間について車両通行量を示す情報である。従って、比較的汎用的な情報に基づいて車列が発生し得るか否かを判定することができる。
【0035】
(2)走行支援処理:
次に、以上の構成においてナビゲーション装置10が実施する走行支援処理について説明する。図2は、走行支援処理を示すフローチャートである。自車両が走行している過程において制御部20は地図情報取得部21aの処理によって自車両の周辺の道路を示す地図情報30aを取得しており、制御部20は当該地図情報30aに基づいて表示部44に自車両の周辺の道路を示す地図を表示させている。本実施形態においては、当該地図を表示させた状態において走行支援処理が実行される。
【0036】
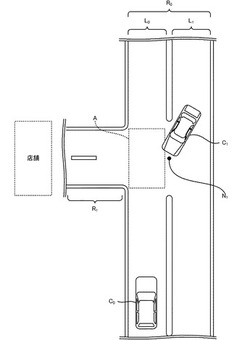
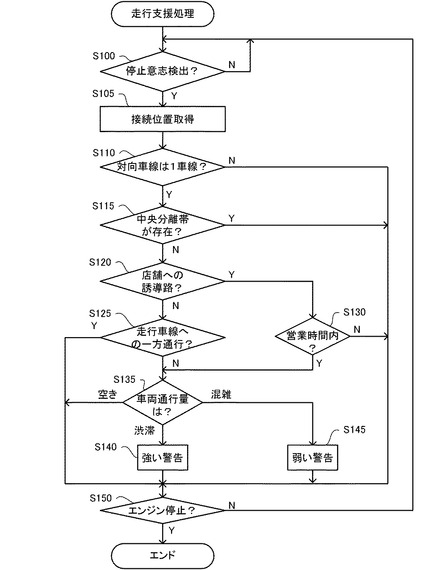
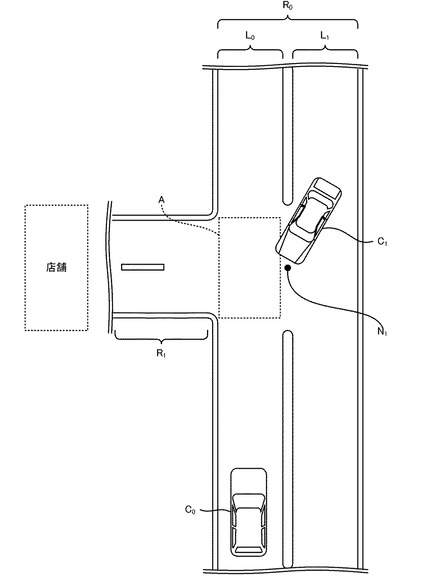
当該走行支援処理が実行されると、制御部20は、停止意志検出部21bの処理により、停止意志を検出したか否かを判定する(ステップS100)。ステップS100においては、停止意志を検出したと判別されるまでステップS100を繰り返す。ステップS100において停止意志を検出したと判別されると、制御部20は、接続位置取得部21cの処理によって接続位置を取得する(ステップS105)。図3は、自車両が走行する道路R0に接続する接続道路R1を例示する図である。同図3に示す例において、道路R0は片側1車線の道路であり、一方側に自車両C0が走行する走行車線L0が存在し、他方側に走行車線L0と逆向きの方向へ走行するための対向車線L1が存在する。図3に示す接続道路R1は、自車両C0の前方の所定範囲において走行車線L0から延びる接続道路であるため、ステップS105においては当該接続道路R1と走行車線L0との交差点に相当するノードN1が示す位置を接続位置として取得する。
【0037】
次に、制御部20は、地図情報30aを参照して対向車線L1の数を特定し、対向車線L1が1車線であるか否かを判定する(ステップS110)。ステップS110において対向車線L1が1車線であると判別されない場合、本実施形態においては対向車線L1上に他車両C1が停滞してもその後を走行する後続車両は他車両C1を避けることが可能であるとみなし、車列が発生しないとみなしてステップS115〜S145をスキップする。すなわち、本実施形態においては、接続道路R1への進入可否の判定と車両通行量に基づいて車列が発生し得ることの判定とを行う前に、車列が発生しない状況を除外する構成としている。むろん、対向車線が2車線以上存在する場合に車列が発生し得るのであれば、ステップS110を省略してもよい。
【0038】
ステップS110において対向車線L1が1車線であると判別された場合、制御部20は、接続位置において他車両C1が対向車線から走行車線を横切って接続道路へ進入することが可能であるか否かを判定する(ステップS115〜ステップS130)。具体的には、制御部20は、進入可否判定部21dの処理により、接続道路R1の延長線上(すなわち、接続位置に相当する交差点部分)に、対向車線L1から走行車線L0への進入を防止する中央分離帯が存在するか否かを判定する(ステップS115)。ステップS115において中央分離帯が存在すると判別されたときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが不可能であるとみなしてステップS120〜S145をスキップする。
【0039】
ステップS115において中央分離帯が存在すると判別されない場合、制御部20は、進入可否判定部21dの処理により、接続道路R1が店舗への誘導路であるか否かを判別する(ステップS120)。図3に破線で例示するように接続道路R1におけるノードN1と逆側の端に店舗が存在する場合には、ステップS120にて接続道路R1が店舗への誘導路であると判別されてステップS130が実行される。接続道路R1におけるノードN1と逆側の端に店舗が存在しない場合には、ステップS120にて接続道路R1が店舗への誘導路であると判別されず、ステップS125を実行する。
【0040】
ステップS125において制御部20は、進入可否判定部21dの処理により接続道路R1が走行車線L0への一方通行であるか否かを判別する。ステップ125において接続道路R1が走行車線L0への一方通行であると判別されたときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが不可能であるとみなしてステップS135〜S145をスキップする。ステップ125において接続道路R1が走行車線L0への一方通行であると判別されないときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが可能であるとみなしてステップS135を実行する。
【0041】
一方、ステップS120の判別により、接続道路R1が店舗への誘導路であると判別された場合、制御部20は、進入可否判定部21dの処理により地図情報30aを参照し、現在時刻が接続道路R1の端部に存在する店舗の営業時間内であるか否かを判別する(ステップS130)。ステップS130にて現在時刻が店舗の営業時間内であると判別されない場合には、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが不可能であるとみなしてステップS135〜S145をスキップする。ステップ130において現在時刻が店舗の営業時間内であると判別されたときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが可能であるとみなしてステップS135を実行する。
【0042】
ステップ135において制御部20は、車列発生判定部21eの処理により、車両通行量を判定する。すなわち、本実施形態においては、車両通行量が示す渋滞度が「混雑」あるいは「渋滞」であるときに車列が発生し得るとみなし、車両通行量が示す渋滞度が「空き」であるときに車列が発生しないとみなす。このため、ステップS135において車両通行量が示す渋滞度が「空き」であると判別されたときには、ステップS140,S145をスキップする。
【0043】
一方、ステップS135において車両通行量が示す渋滞度が「渋滞」であると判別されたとき、制御部20は、案内部21fの処理により強い警告を行う(ステップS140)。すなわち、接続道路R1をノードN1側に延長した部分と走行車線L0とが重なる部分(図3において破線で示す領域A)に自車両を停止しないように促す案内を行う。ステップS135において車両通行量が示す渋滞度が「混雑」であると判別されたとき、制御部20は、案内部21fの処理により弱い警告を行う(ステップS145)。すなわち、領域Aに自車両を停止しないことが推奨される旨の案内を行う。以上のようなステップS100以降の処理は、エンジンが停止されたと制御部20によって判別されるまで繰り返される(ステップS150)。
【0044】
(3)他の実施形態:
以上の実施形態は、本発明を実施するための一例であり、地図情報と対向車線上の車両通行量とに基づいて接続位置にて車列が発生し得るか否かを判定する限りにおいて他にも種々の実施形態を採用可能である。例えば、進入可否を判定するための要素として、上述の実施形態に挙げた要素以外の要素を考慮してもよく、接続位置における交通規則によって接続位置において他車両が対向車線から走行車線を横切る方向へ曲がること(図3に示す例では右折)が禁止されている場合には、交通規則に基づいて判定を行う構成を採用可能である。
【0045】
さらに、接続位置取得手段は、自車両の前方の接続位置を取得することができればよく、車両が接続道路に進入する際に自車両の停止位置によっては当該自車両が接続道路に対する車両の進入を妨げ、当該車両の後方に後続車両の車列が発生し得る地点の候補として接続位置を取得することができればよい。従って、上述のように走行車線上の所定範囲に含まれる総ての接続位置を取得する構成の他、自車両の停止位置を推定するとともに推定された停止位置に対応した接続位置を抽出する構成としてもよい。例えば、停止意志に応じて自車両が停止する停止位置を推定し、推定された停止位置の周辺(停止位置から所定範囲内の位置)に接続位置が存在する場合にその接続位置を取得する構成としてもよいし、停止意志に応じて自車両が停止し得る区間を特定し、当該区間内の複数の箇所で他の接続道路が走行車線に接続される場合に各接続道路の接続位置を取得する構成としてもよい。後者は、停止意志に応じた自車両の停止位置を正確に特定することが困難である場合に好適な構成である。
【0046】
なお、停止位置を特定するための構成としては種々の構成を採用可能であり、時間や距離に対する車速の推移を特定し、車速が所定値以下となった時点で外挿を行って車速が略"0"になる地点を推定する構成や、車速が所定値以下となった時点で車速の推移を走行履歴に基づいて予測して車速が略"0"になる地点を推定する構成等を採用可能である。さらに、車速が所定値以下となった時点で停止意志を検出する構成においては、当該所定値を道路種別によって変動させてもよい。
【0047】
車両交通量を示す情報は、対向車線上の車両の走行履歴に基づいて予め時間帯毎に特定された車両交通量の傾向を示す情報であってもよい。例えば、予め走行車線上での車列の発生確率を時間帯毎に特定しておき、時間帯を特定することによって車両交通量に対応する車列の発生確率を特定する構成であってもよい。さらに、案内としても各種の案内を採用可能であり、車列が発生し得る接続位置が複数個存在するのであれば、各地点について案内を行えばよい。
【図面の簡単な説明】
【0048】
【図1】走行支援装置を示すブロック図である。
【図2】走行支援処理を示すフローチャートである。
【図3】接続位置を例示する図である。
【符号の説明】
【0049】
10…ナビゲーション装置、20…制御部、21…走行支援プログラム、21a…地図情報取得部、21b…停止意志検出部、21c…接続位置取得部、21d…進入可否判定部、21e…車列発生判定部、21f…案内部、21g…通信制御部、30…記憶媒体、30a…地図情報、30b…車両通行量情報、30b…車両通行量情報、40…ブレーキセンサ、41…車速センサ、42…GPS受信部、43…ジャイロセンサ、44…表示部、45…スピーカー、46…通信部
【技術分野】
【0001】
本発明は、対向車線上での車列の発生を予防するための案内を行う走行支援装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、自車両が走行する走行車線の対向車線から、他車両が走行車線を横切って当該走行車線に接続する接続道路に対して進入する際に、対向車線上で他車両の後続車両が車列を形成することを防止する技術が知られている。例えば、特許文献1においては、走行車線と接続道路との接続位置に対応する交差点において、対向車線から接続道路に進入した車両台数を示す交通情報を取得し、当該交通情報に基づいて自車両の走行車線を他車両が横切る可能性を特定する。そして、当該横切る可能性が高いときには交差点の手前で停止するように警告する。
【特許文献1】特開2007−310745号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の技術においては、自車両の走行車線を他車両が横切る可能性が高い交差点について案内するために、当該交差点についての交通情報を取得している。従って、交差点毎の交通状態に応じて自車両の走行車線を他車両が横切る可能性を正確に判別することが可能である。しかし、対向車線から接続道路に進入する他車両の情報を正確に収集するのは困難であるため、従来の技術に加え、より汎用的な情報を用いて交差点での車列の発生を防止するための技術も必要とされていた。
本発明は、上記課題に鑑みてなされたものであり、多くの場面で取得可能な汎用的な情報に基づいて車列の発生を防止するための案内を行う技術を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記の目的を達成するため、本発明においては、自車両の運転者の停止意志を検出した場合に、自車両の前方において接続道路が走行車線に接続する接続位置を取得する。そして、当該接続位置において、他車両が対向車線から走行車線を横切って前記接続道路へ進入することが可能であり、自車両が接続位置で停止することによって対向車線上に車両が停滞し、当該停滞する車両の後方に後続車両の車列(以下単に車列とも呼ぶ)が発生し得ると、車両通行量に基づいて判定される場合に、接続位置における自車両の停止を防止するための案内を行う。
【0005】
すなわち、本発明においては、地図情報と対向車線上の車両通行量とに基づいて接続位置において対向車線上に車列が発生し得るか否かを判定している。ここで、対向車線上の車両通行量は車線上での車両の通行量を示しており、特定の位置のみについての車両通行量を示すものではない。すなわち、少なくともある一定の区間における車両通行量を評価するための指標に基づいて接続位置において車列が発生し得るか否かを判定する。従って、比較的汎用的な情報に基づいて車列が発生し得るか否かを判定することができる。
【0006】
ここで、地図情報は車両が走行する道路やその周辺の道路を特定するための情報であればよく、道路同士の接続関係や道路の形状、道路上の地物、車線の方向など、道路に関する各種の情報を含み得る。停止意志検出手段は、自車両の運転者の停止意志を検出することができれば良く、例えば、自車両を停止させるための減速動作が行われている場合に停止意志があるとみなす構成等を採用可能である。
【0007】
接続位置取得手段は、自車両の前方の接続位置を取得することができればよい。従って、停止意志に応じて自車両が停止する停止位置を推定し、推定された停止位置の周辺(停止位置から所定範囲内の位置)に接続位置が存在する場合にその接続位置を取得する構成としてもよいし、停止意志に応じて自車両が停止し得る区間を特定し、当該区間内の複数の箇所で他の接続道路が走行車線に接続される場合に各接続道路の接続位置を取得する構成としてもよい。後者は、停止意志に応じた自車両の停止位置を正確に特定することが困難である場合に好適な構成である。なお、接続位置は、自車両の走行車線に接続道路が接続される位置に対応していれば良く、走行車線上の位置であっても良いし、走行車線が存在する道路上の位置であっても良い。例えば、接続道路の延長線と走行車線との交点や、接続道路と走行車線が存在する道路との交差点に相当する位置であっても良い。
【0008】
進入可否判定手段は、接続位置において、他車両が対向車線から走行車線を横切って接続道路へ進入可能であるか否かを判定することができればよく、地図情報が示す道路の情報から各道路上での進行方向、各道路の接続関係を特定して他車両が走行車線を横切り、かつ、接続道路へ進入する方向へ走行可能であるか否かを判定すればよい。
【0009】
車列発生判定手段は、自車両が前記接続位置で停止して、対向車線から接続道路へ向かう車両の走行を妨げ得る状況において車列が発生し得るか否かを当該対向車線上の車両通行量に基づいて判定することができればよい。すなわち、車両が接続道路へ進入することが可能な接続位置に自車両が停止すると、車両が対向車線から自車両の走行車線を横切って接続道路に進入することを妨げるため、当該車両が停滞する。しかし、車両通行量が少ない場合には対向車線上に車両が停滞しても当該対向車線上の後続車両の流れが妨げられにくく、対向車線において車列は発生しにくい。一方、車両通行量が多い場合には、対向車線上に車両が停滞することによって対向車線上の車両の流れが妨げられて対向車線上に車列が発生し得る。そこで、車両通行量に基づいて車列が発生し得るか否かを判定する構成とする。
【0010】
ここで、判断指標として用いる車両通行量は、対向車線上の車両の通行量であるため、接続位置に関する情報に限定されずより広い範囲についての車両通行量を示す情報である。例えば、接続位置を含む区間における対向車線上の車両通行量を示す情報を利用して車列が発生し得るか否か判定する構成を採用可能である。また、車両交通量を示す情報は、当該現在時刻における車両交通量を測定した情報であってもよいし、対向車線上の車両の走行履歴に基づいて予め時間帯毎に特定された車両交通量の傾向を示す情報であってもよい。前者としては、プローブ情報やVICS情報(VICSは登録商標)によって特定される渋滞情報等が挙げられる。
【0011】
さらに、案内手段においては、接続位置における自車両の停止を防止するための案内を行うことができればよく、接続道路の接続位置に停止することで車列が発生し得ることを案内してもよいし、車列が発生し得る接続位置の存在を案内してもよく種々の構成を採用可能である。むろん、車列が発生し得る接続位置が複数個存在するのであれば、各地点について案内を行えばよい。
【0012】
さらに、車両の通行量に応じて案内の内容を変えてもよい。例えば、車両通行量が多いほど接続位置での停止に対して強い警告を行うなど、対向車線上の車両通行量に応じて案内の内容を決定する構成としてもよい。この構成によれば、車列の発生を効果的に防止するための案内を車両通行量に応じて適切に決定することができる。
【0013】
さらに、地図情報に道路上のノードの位置と各道路上の車線の進行方向、車線間の中央分離帯の有無を示す情報を記録する構成において、当該地図情報に基づいて、接続位置において、接続道路の延長線上に対向車線から走行車線への進入を防止する中央分離帯が存在するか否かを判定し、中央分離帯が存在しない場合に接続道路へ進入することが可能であると判定する構成を採用可能である。この構成によれば、対向車線から他車両が接続道路に進入し得ない状況を確実に除外することが可能である。
【0014】
さらに、進入可否を判定するにあたり、接続道路の属性を判定指標にしてもよい。例えば、接続道路の一端に走行車線が接続され、他端に店舗が存在する場合、接続道路に進入可能であるか否かが店舗の営業時間に依存する場合がある。そこで、接続道路が店舗への誘導路であるとともに現在時刻が店舗の営業時間内である場合に、接続道路へ進入することが可能である構成とすれば、他車両が接続道路に進入し得ない状況を確実に除外することが可能である。
【0015】
なお、本発明のように、地図情報と対向車線上の車両通行量とに基づいて接続位置にて車列が発生し得るか否かを判定する手法は、この処理を行う方法やプログラムとしても適用可能である。また、以上のような走行支援装置、方法、プログラムは、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあれば、車両に搭載されない各部と連携して実現される場合もあり、各種の態様を含むものである。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、走行支援装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【発明を実施するための最良の形態】
【0016】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)走行支援装置の構成:
(2)走行支援処理:
(3)他の実施形態:
【0017】
(1)走行支援装置の構成:
図1は、自車両に搭載された走行支援装置の構成を示すブロック図である。本実施形態において走行支援装置は、ナビゲーション装置10によって実現される。ナビゲーション装置10は、CPU、RAM、ROM等を備える制御部20と記憶媒体30とを備えており、記憶媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとして走行支援プログラム21を実行可能である。
【0018】
自車両には、走行支援プログラム21によって、自車量の対向車線上に車列を発生させることを防止する処理を行うために、ブレーキセンサ40と車速センサ41とGPS受信部42とジャイロセンサ43と表示部44とスピーカー45と通信部46とが備えられている。ブレーキセンサ40は、自車両に搭載された制動部にて制動力を発生させるためのペダル操作を検出するためのセンサである。制御部20は、図示しないインタフェースを介して当該ブレーキセンサ40の出力信号を取得し、当該出力信号に基づいて自車両にて減速動作が行われていることを判定する。むろん、減速動作が行われていることは他のセンサ、例えば、スロットルセンサ等を組み合わせて判定してもよい。
【0019】
車速センサ41は、自車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、自車両の速度を取得する。ジャイロセンサ43は、自車両の水平面内の旋回についての角加速度を検出し、自車両の向きに対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、自車両の進行方向を取得する。GPS受信部42は、GPS衛星からの電波を受信し、図示しないインタフェースを介して自車両の現在位置を算出するための信号や現在時刻を示す信号を出力する。制御部20は、この信号を取得して自車両の現在位置および現在時刻を取得する。車速センサ41およびジャイロセンサ43は、GPS受信部42の出力信号から特定される自車両の現在位置を補正するためなどに利用される。
【0020】
また、制御部20は、所定の出力を表示部44およびスピーカー45に対して出力して当該表示部44にて任意の画像を表示させ、スピーカー45にて任意の音声を出力させる。本実施形態において制御部20は、後述する地図情報30aに登録された道路によって地図を構成して表示部44上に地図を表示させるとともに、対向車線上に車列が発生し得る場合には車列の発生を防止させるための案内を表示させる。
【0021】
通信部46は、図示しない外部の車両通行量情報の管理センターと無線通信を行う回路を備えており、制御部20は、通信部46を制御して車両通行量情報の管理センターから送信される車両通行量情報30bを取得して後述する記憶媒体30に記録する。
【0022】
制御部20は、走行支援プログラム21を実行することにより、車列の発生を防止するための案内を行う。このため、走行支援プログラム21は、地図情報取得部21aと停止意志検出部21bと接続位置取得部21cと進入可否判定部21dと車列発生判定部21eと案内部21fと通信制御部21gとを備えている。また、記憶媒体30には予め地図情報30aが記憶され、通信部46を介して車両通行量情報30bを取得したときには記憶媒体には当該車両通行量情報30bが記録される。
【0023】
地図情報30aは、自車両が走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間点データ、ノード同士の連結を示すリンクデータ、各道路上の車線および各車線上での車両の進行方向を示すデータ、道路上の地物(中央分離帯等)を示すデータ、道路周辺に存在する店舗等の施設を示すデータ等を含み、自車両の現在位置から目的地までの経路の探索や経路案内等に利用される。なお、道路はノードデータおよびリンクデータによって特定することができる。すなわち、本実施形態においては、道路の交差点の中央に相当する位置にノードが設定され、ノードデータにその位置が対応づけられている。また、リンクデータによって連結されているノード間には道路が存在することを示している。従って、地図情報30aとして記録されているノードデータとリンクデータとによって各道路が延びる方向と各道路の接続関係とを特定することができる。また、車線上での車両の進行方向や道路上の地物を示す情報によって車両によって走行可能な経路を特定可能である。なお、施設を示すデータにおいては、店舗の位置および店舗の営業時間を示す情報が含まれる。
【0024】
車両通行量情報30bは、道路上の車両通行量を示す情報であり、少なくとも自車両が走行する走行車線の対向車線上の車両通行量を示す情報を特定できればよい。従って、例えば、道路上の車両通行量を進行方向別に示す情報を道路区間毎に取得し、自車両が走行している道路区間において自車両の走行車線と逆向きの進行方向となっている対向車線について車両通行量を取得するように構成すればよい。なお、車両通行量は各種の態様によって表現可能であり、単位時間当たりに通行する車両の数や渋滞度を示す情報等によって車両通行量情報を構成可能である。より具体的には、プローブ情報やVICS情報とうによって構成可能である。ここでは、車両通行量が渋滞度を示す情報であり、「空き、混雑、渋滞」の順に車両の量が多くなることを示す情報であるとして本実施形態を説明する。
【0025】
地図情報取得部21aは、記憶媒体30から地図情報30aとして登録された各種情報を適宜取得する機能を制御部20に実現させるモジュールであり、制御部20は当該地図情報取得部21aの処理によって自車両の前方の道路を示す情報を取得する。停止意志検出部21bは、自車両の運転者の停止意志を検出する機能を制御部20に実現させるモジュールであり、制御部20は、ブレーキセンサ40の出力信号および車速センサ41の出力信号を取得し、自車両の車速が所定値以下となった状態でブレーキによる減速動作がなされたときに停止意志があったことを検出する。
【0026】
接続位置取得部21cは、停止意志を検出した場合に、自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、上述のようにして取得された地図情報30aを参照し、自車両が走行する走行車線を特定するとともに当該走行車線における自車両の前方の所定範囲に当該走行車線から延びる他の接続道路が接続されているか否かを判定する。そして、接続道路が検出されたときには当該接続道路と走行車線との交差点の位置(交差点に相当するノードが示す位置)を接続位置として取得する。なお、接続位置は交差点の位置に限定されず、走行車線上の位置であっても良い。例えば、走行車線毎にノードやリンクが設定されている地図情報を参照し、接続道路の延長線と走行車線との交点を走行車線毎のノードおよびリンクと接続道路のノードおよびリンクとに基づいて特定しても良い。また、ノードやリンクを利用しないで接続道路が走行車線に接続される位置を特定することも可能である。例えば、道路の周辺に存在する地物(施設等)の位置を示す情報を含む地図情報を参照し、地物の位置から走行車線あるいは走行車線が存在する道路に向かって延びる垂線を想定し、当該垂線と走行車線あるいは走行車線が存在する道路との交点を接続道路の接続位置とする構成を採用可能である。
【0027】
進入可否判定部21dは、接続位置において他車両が対向車線から走行車線を横切って接続道路へ進入することが可能であるか否かを判定する機能を制御部20に実現させるモジュールである。本実施形態において、接続道路に対する進入可否は、地図情報30a(すなわち、予め決められた道路や道路周辺の情報)に基づいて特定される。
【0028】
具体的には、まず、制御部20が、上述のようにして取得された地図情報30aを参照し、接続道路の延長線上(上述の接続位置に相当する交差点の中央部分)に、対向車線から走行車線への進入を防止する中央分離帯が存在するか否かを判定する。当該中央分離帯が存在しない場合、さらに、接続道路の種類に応じた判別を行う。すなわち、制御部20は、地図情報30aを参照して接続位置と逆側の接続道路の端部に店舗が存在するか否かを判定することによって、接続道路が店舗への誘導路であるか否かを判定する。
【0029】
接続道路が店舗への誘導路である場合には図示しない計時回路に基づいて現在時刻を特定し、地図情報30aを参照して現在時刻が当該店舗の営業時間内であるか否かを判定する。そして、現在時刻が当該店舗の営業時間内であると判定されたときに他車両が接続道路へ進入可能であると判定する。
【0030】
一方、接続道路が店舗への誘導路でない場合(接続位置と逆側の接続道路の端部に道路が接続されている場合)には、地図情報30aを参照して接続道路上で車両に許可された進行方向を特定することによって他車両が接続道路へ進入可能であるか否かを判定する。すなわち、接続道路が接続道路から走行車線への一方通行でない場合(双方向通行道路あるいは走行車線側から接続道路への一方通行である場合)に他車両が接続道路へ進入可能であると判定する。
【0031】
車列発生判定部21eは、他車両が接続道路に進入可能である場合に、自車両が接続位置で停止して対向車線上に車両が停滞することにより、対向車線上に停滞する車両の後続車両による車列が発生し得るか否かを判定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、車両通行量情報30bを取得して、自車両が走行する走行車線に対する対向車線上の車両通行量を特定し、当該車両通行量が所定以上である場合に車列が発生し得ると判定する。本実施形態においては、車両通行量が「混雑」あるいは「渋滞」であるときに車列が発生し得ると判定する。
【0032】
案内部21fは、車列が発生し得ると判定された場合に、接続位置における自車両の停止を防止するための案内を行う機能を制御部20に実現させるモジュールである。すなわち、制御部20は、表示部44およびスピーカー45に対して制御信号を出力して、接続位置に停止すると対向車線上に車列を発生させてしまう旨の案内を行う。本実施形態においては、車両通行量に応じて案内の内容を変更する決定する構成としており、車両通行量が多いほど警告の度合いを強くする。本実施形態においては、車両通行量が「渋滞」である場合には接続位置での停止を行わないように表示部44に警告を表示させるとともにスピーカー45から警告音を出力させ、車両通行量が「混雑」である場合には接続位置で停止しないことが推奨される旨の案内を表示部44に表示させる構成等を採用可能である。
【0033】
通信制御部21gは、通信部46を介して車両通行量情報30bを受信する機能を制御部20に実現させるモジュールであり、制御部20は所定のタイミングで車両通行量情報の管理センターと通信を行って車両通行量情報30bを取得し、記録媒体30に記録する。
【0034】
以上の構成においては、地図情報と対向車線上の車両通行量とに基づいて接続位置において対向車線上に車列が発生し得るか否かを判定している。本実施形態における車両通行量は道路区間上の渋滞度を車線毎に示す情報であり、交差点など特定の位置よりも広い区間について車両通行量を示す情報である。従って、比較的汎用的な情報に基づいて車列が発生し得るか否かを判定することができる。
【0035】
(2)走行支援処理:
次に、以上の構成においてナビゲーション装置10が実施する走行支援処理について説明する。図2は、走行支援処理を示すフローチャートである。自車両が走行している過程において制御部20は地図情報取得部21aの処理によって自車両の周辺の道路を示す地図情報30aを取得しており、制御部20は当該地図情報30aに基づいて表示部44に自車両の周辺の道路を示す地図を表示させている。本実施形態においては、当該地図を表示させた状態において走行支援処理が実行される。
【0036】
当該走行支援処理が実行されると、制御部20は、停止意志検出部21bの処理により、停止意志を検出したか否かを判定する(ステップS100)。ステップS100においては、停止意志を検出したと判別されるまでステップS100を繰り返す。ステップS100において停止意志を検出したと判別されると、制御部20は、接続位置取得部21cの処理によって接続位置を取得する(ステップS105)。図3は、自車両が走行する道路R0に接続する接続道路R1を例示する図である。同図3に示す例において、道路R0は片側1車線の道路であり、一方側に自車両C0が走行する走行車線L0が存在し、他方側に走行車線L0と逆向きの方向へ走行するための対向車線L1が存在する。図3に示す接続道路R1は、自車両C0の前方の所定範囲において走行車線L0から延びる接続道路であるため、ステップS105においては当該接続道路R1と走行車線L0との交差点に相当するノードN1が示す位置を接続位置として取得する。
【0037】
次に、制御部20は、地図情報30aを参照して対向車線L1の数を特定し、対向車線L1が1車線であるか否かを判定する(ステップS110)。ステップS110において対向車線L1が1車線であると判別されない場合、本実施形態においては対向車線L1上に他車両C1が停滞してもその後を走行する後続車両は他車両C1を避けることが可能であるとみなし、車列が発生しないとみなしてステップS115〜S145をスキップする。すなわち、本実施形態においては、接続道路R1への進入可否の判定と車両通行量に基づいて車列が発生し得ることの判定とを行う前に、車列が発生しない状況を除外する構成としている。むろん、対向車線が2車線以上存在する場合に車列が発生し得るのであれば、ステップS110を省略してもよい。
【0038】
ステップS110において対向車線L1が1車線であると判別された場合、制御部20は、接続位置において他車両C1が対向車線から走行車線を横切って接続道路へ進入することが可能であるか否かを判定する(ステップS115〜ステップS130)。具体的には、制御部20は、進入可否判定部21dの処理により、接続道路R1の延長線上(すなわち、接続位置に相当する交差点部分)に、対向車線L1から走行車線L0への進入を防止する中央分離帯が存在するか否かを判定する(ステップS115)。ステップS115において中央分離帯が存在すると判別されたときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが不可能であるとみなしてステップS120〜S145をスキップする。
【0039】
ステップS115において中央分離帯が存在すると判別されない場合、制御部20は、進入可否判定部21dの処理により、接続道路R1が店舗への誘導路であるか否かを判別する(ステップS120)。図3に破線で例示するように接続道路R1におけるノードN1と逆側の端に店舗が存在する場合には、ステップS120にて接続道路R1が店舗への誘導路であると判別されてステップS130が実行される。接続道路R1におけるノードN1と逆側の端に店舗が存在しない場合には、ステップS120にて接続道路R1が店舗への誘導路であると判別されず、ステップS125を実行する。
【0040】
ステップS125において制御部20は、進入可否判定部21dの処理により接続道路R1が走行車線L0への一方通行であるか否かを判別する。ステップ125において接続道路R1が走行車線L0への一方通行であると判別されたときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが不可能であるとみなしてステップS135〜S145をスキップする。ステップ125において接続道路R1が走行車線L0への一方通行であると判別されないときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが可能であるとみなしてステップS135を実行する。
【0041】
一方、ステップS120の判別により、接続道路R1が店舗への誘導路であると判別された場合、制御部20は、進入可否判定部21dの処理により地図情報30aを参照し、現在時刻が接続道路R1の端部に存在する店舗の営業時間内であるか否かを判別する(ステップS130)。ステップS130にて現在時刻が店舗の営業時間内であると判別されない場合には、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが不可能であるとみなしてステップS135〜S145をスキップする。ステップ130において現在時刻が店舗の営業時間内であると判別されたときには、接続位置において他車両C1が対向車線L1から走行車線L0を横切って接続道路R1へ進入することが可能であるとみなしてステップS135を実行する。
【0042】
ステップ135において制御部20は、車列発生判定部21eの処理により、車両通行量を判定する。すなわち、本実施形態においては、車両通行量が示す渋滞度が「混雑」あるいは「渋滞」であるときに車列が発生し得るとみなし、車両通行量が示す渋滞度が「空き」であるときに車列が発生しないとみなす。このため、ステップS135において車両通行量が示す渋滞度が「空き」であると判別されたときには、ステップS140,S145をスキップする。
【0043】
一方、ステップS135において車両通行量が示す渋滞度が「渋滞」であると判別されたとき、制御部20は、案内部21fの処理により強い警告を行う(ステップS140)。すなわち、接続道路R1をノードN1側に延長した部分と走行車線L0とが重なる部分(図3において破線で示す領域A)に自車両を停止しないように促す案内を行う。ステップS135において車両通行量が示す渋滞度が「混雑」であると判別されたとき、制御部20は、案内部21fの処理により弱い警告を行う(ステップS145)。すなわち、領域Aに自車両を停止しないことが推奨される旨の案内を行う。以上のようなステップS100以降の処理は、エンジンが停止されたと制御部20によって判別されるまで繰り返される(ステップS150)。
【0044】
(3)他の実施形態:
以上の実施形態は、本発明を実施するための一例であり、地図情報と対向車線上の車両通行量とに基づいて接続位置にて車列が発生し得るか否かを判定する限りにおいて他にも種々の実施形態を採用可能である。例えば、進入可否を判定するための要素として、上述の実施形態に挙げた要素以外の要素を考慮してもよく、接続位置における交通規則によって接続位置において他車両が対向車線から走行車線を横切る方向へ曲がること(図3に示す例では右折)が禁止されている場合には、交通規則に基づいて判定を行う構成を採用可能である。
【0045】
さらに、接続位置取得手段は、自車両の前方の接続位置を取得することができればよく、車両が接続道路に進入する際に自車両の停止位置によっては当該自車両が接続道路に対する車両の進入を妨げ、当該車両の後方に後続車両の車列が発生し得る地点の候補として接続位置を取得することができればよい。従って、上述のように走行車線上の所定範囲に含まれる総ての接続位置を取得する構成の他、自車両の停止位置を推定するとともに推定された停止位置に対応した接続位置を抽出する構成としてもよい。例えば、停止意志に応じて自車両が停止する停止位置を推定し、推定された停止位置の周辺(停止位置から所定範囲内の位置)に接続位置が存在する場合にその接続位置を取得する構成としてもよいし、停止意志に応じて自車両が停止し得る区間を特定し、当該区間内の複数の箇所で他の接続道路が走行車線に接続される場合に各接続道路の接続位置を取得する構成としてもよい。後者は、停止意志に応じた自車両の停止位置を正確に特定することが困難である場合に好適な構成である。
【0046】
なお、停止位置を特定するための構成としては種々の構成を採用可能であり、時間や距離に対する車速の推移を特定し、車速が所定値以下となった時点で外挿を行って車速が略"0"になる地点を推定する構成や、車速が所定値以下となった時点で車速の推移を走行履歴に基づいて予測して車速が略"0"になる地点を推定する構成等を採用可能である。さらに、車速が所定値以下となった時点で停止意志を検出する構成においては、当該所定値を道路種別によって変動させてもよい。
【0047】
車両交通量を示す情報は、対向車線上の車両の走行履歴に基づいて予め時間帯毎に特定された車両交通量の傾向を示す情報であってもよい。例えば、予め走行車線上での車列の発生確率を時間帯毎に特定しておき、時間帯を特定することによって車両交通量に対応する車列の発生確率を特定する構成であってもよい。さらに、案内としても各種の案内を採用可能であり、車列が発生し得る接続位置が複数個存在するのであれば、各地点について案内を行えばよい。
【図面の簡単な説明】
【0048】
【図1】走行支援装置を示すブロック図である。
【図2】走行支援処理を示すフローチャートである。
【図3】接続位置を例示する図である。
【符号の説明】
【0049】
10…ナビゲーション装置、20…制御部、21…走行支援プログラム、21a…地図情報取得部、21b…停止意志検出部、21c…接続位置取得部、21d…進入可否判定部、21e…車列発生判定部、21f…案内部、21g…通信制御部、30…記憶媒体、30a…地図情報、30b…車両通行量情報、30b…車両通行量情報、40…ブレーキセンサ、41…車速センサ、42…GPS受信部、43…ジャイロセンサ、44…表示部、45…スピーカー、46…通信部
【特許請求の範囲】
【請求項1】
地図情報を取得する地図情報取得手段と、
自車両の運転者の停止意志を検出する停止意志検出手段と
前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する接続位置取得手段と、
前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定する進入可否判定手段と、
前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定する車列発生判定手段と、
前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う案内手段と、
を備える走行支援装置。
【請求項2】
前記案内手段は、前記対向車線上の車両通行量に応じて前記案内の内容を決定する、
請求項1に記載の走行支援装置。
【請求項3】
前記進入可否判定手段は、前記接続道路の延長線上に前記対向車線から前記走行車線への進入を防止する中央分離帯が存在しない場合に、前記接続道路へ進入することが可能であると判定する、
請求項1または請求項2のいずれかに記載の走行支援装置。
【請求項4】
前記進入可否判定手段は、前記接続道路が店舗への誘導路であるとともに現在時刻が前記店舗の営業時間内である場合に、前記接続道路へ進入することが可能であると判定する、
請求項1〜請求項3のいずれかに記載の走行支援装置。
【請求項5】
地図情報を取得する地図情報取得工程と、
自車両の運転者の停止意志を検出する停止意志検出工程と
前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する接続位置取得工程と、
前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定する進入可否判定工程と、
前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定する車列発生判定工程と、
前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う案内工程と、
を含む走行支援方法。
【請求項6】
地図情報を取得する地図情報取得機能と、
自車両の運転者の停止意志を検出する停止意志検出機能と
前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する接続位置取得機能と、
前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定する進入可否判定機能と、
前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定する車列発生判定機能と、
前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う案内機能と、
をコンピュータに実現させる走行支援プログラム。
【請求項1】
地図情報を取得する地図情報取得手段と、
自車両の運転者の停止意志を検出する停止意志検出手段と
前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する接続位置取得手段と、
前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定する進入可否判定手段と、
前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定する車列発生判定手段と、
前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う案内手段と、
を備える走行支援装置。
【請求項2】
前記案内手段は、前記対向車線上の車両通行量に応じて前記案内の内容を決定する、
請求項1に記載の走行支援装置。
【請求項3】
前記進入可否判定手段は、前記接続道路の延長線上に前記対向車線から前記走行車線への進入を防止する中央分離帯が存在しない場合に、前記接続道路へ進入することが可能であると判定する、
請求項1または請求項2のいずれかに記載の走行支援装置。
【請求項4】
前記進入可否判定手段は、前記接続道路が店舗への誘導路であるとともに現在時刻が前記店舗の営業時間内である場合に、前記接続道路へ進入することが可能であると判定する、
請求項1〜請求項3のいずれかに記載の走行支援装置。
【請求項5】
地図情報を取得する地図情報取得工程と、
自車両の運転者の停止意志を検出する停止意志検出工程と
前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する接続位置取得工程と、
前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定する進入可否判定工程と、
前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定する車列発生判定工程と、
前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う案内工程と、
を含む走行支援方法。
【請求項6】
地図情報を取得する地図情報取得機能と、
自車両の運転者の停止意志を検出する停止意志検出機能と
前記停止意志を検出した場合、前記地図情報に基づいて、前記自車両の前方において当該自車両が走行する走行車線に接続される接続道路の接続位置を取得する接続位置取得機能と、
前記地図情報に基づいて、前記接続位置において他車両が対向車線から前記走行車線を横切って前記接続道路へ進入することが可能であるか否かを判定する進入可否判定機能と、
前記接続道路へ進入することが可能であると判定された場合、前記自車両が前記接続位置で停止することにより前記対向車線上に車両が停滞し、前記対向車線上に停滞する前記車両の後続車両による車列が発生し得るか否かを前記対向車線上の車両通行量に基づいて判定する車列発生判定機能と、
前記車列が発生し得ると判定された場合、前記接続位置における自車両の停止を防止するための案内を行う案内機能と、
をコンピュータに実現させる走行支援プログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−140265(P2010−140265A)
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願番号】特願2008−316020(P2008−316020)
【出願日】平成20年12月11日(2008.12.11)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願日】平成20年12月11日(2008.12.11)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]