
走行支援装置、走行支援方法、及びプログラム
【課題】始点と終点をつなぐ道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができるようにする。
【解決手段】区間分割部120は、道路情報に基づいて、道路情報取得部100が取得した道路情報を、曲率が基準値以上であるカーブ・右左折区間であることを示すカーブ・右左折区間情報と、曲率が基準値未満である直進区間であることを示す直進区間情報と、に分割する。直進軌跡算出部140は、直進区間における走行軌跡である直進区間軌跡を算出する。カーブ・右左折区間軌跡算出部160は、カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、直進区間軌跡とは異なる方法で算出する。軌跡結合部180は、カーブ・右左折区間軌跡と、直進区間軌跡とを結合することにより、始点と終点をつなぐ道路の全域における走行軌跡を定義する。
【解決手段】区間分割部120は、道路情報に基づいて、道路情報取得部100が取得した道路情報を、曲率が基準値以上であるカーブ・右左折区間であることを示すカーブ・右左折区間情報と、曲率が基準値未満である直進区間であることを示す直進区間情報と、に分割する。直進軌跡算出部140は、直進区間における走行軌跡である直進区間軌跡を算出する。カーブ・右左折区間軌跡算出部160は、カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、直進区間軌跡とは異なる方法で算出する。軌跡結合部180は、カーブ・右左折区間軌跡と、直進区間軌跡とを結合することにより、始点と終点をつなぐ道路の全域における走行軌跡を定義する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路において移動体が進むべき走行軌跡を算出することにより、移動体の走行を支援する走行支援装置、走行支援方法、及びプログラムに関する。
【背景技術】
【0002】
近年、自動車などの移動体の走行を支援する走行支援システムの開発が進められている。走行支援システムを実現することにより、自動車を自動走行、例えば隊列走行させることが可能になる。この走行支援システムの主な機能の一つに、道路において移動体が進むべき走行軌跡を算出することが挙げられる。例えば特許文献1には、移動体が進むべき走行軌跡を、B−スプライン曲線を用いて3次元的に算出することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−294446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した特許文献の技術を含め、今までの走行軌跡算出方法は、経路の曲率の変化が小さい場合を想定したものがほとんどである。しかし、一般道や高速道路を含む公道など、通常通行する道路において目的地に到達するまでには、交差点などの曲率の変化が大きい場所を通過する必要がある場合がほとんどである。このため、従来の走行軌跡の算出方法では、通常通行する道路において走行軌跡を高い精度で算出することは難しいことが判明した。
【0005】
本発明の目的は、始点と終点をつなぐ道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができる走行支援装置、走行支援方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
本発明によれば、始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する直進軌跡算出手段と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡算出手段とは異なる方法で算出する曲線軌跡算出手段と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定める軌跡結合手段と、
を備える走行支援装が提供される。
【0007】
本発明によれば、コンピュータが、始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出し、
前記コンピュータが、前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出し、
前記コンピュータが、前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する走行支援方法が提供される。
【0008】
本発明によれば、コンピュータを、道路で走行すべき走行軌跡を算出する走行支援装置として機能させるためのプログラムであって、
前記コンピュータに、
始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する機能と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出する機能と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する機能と、
を実現させるプログラムが提供される。
【発明の効果】
【0009】
本発明によれば、始点と終点をつなぐ道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができる。
【図面の簡単な説明】
【0010】
【図1】第1の実施形態に係る走行支援装置の構成を示すブロック図である。
【図2】走行支援装置が行う処理の考え方を説明する図である。
【図3】直進軌跡算出部の機能構成を示すブロック図である。
【図4】カーブ・右左折区間軌跡算出部の機能構成を示すブロック図である。
【図5】直進軌跡算出部及びカーブ・右左折区間軌跡算出部が走行軌跡を算出するときの条件の一部を説明するための概念図である。
【図6】走行支援装置が行う処理を説明するためのフローチャートである。
【図7】図6のステップS40の詳細を説明するためのフローチャートである。
【図8】図6のステップS60の詳細を説明するためのフローチャートである。
【図9】図6のステップS80の詳細を説明するためのフローチャートである。
【図10】第2の実施形態に係る走行支援システムの構成を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態について、図面を用いて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。なお、以下の実施形態において「記憶」には、メモリ上に一時的に記憶する場合と、ハードディスクなどに記憶させて保存する場合の双方が含まれる。このため、記憶部は、ハード構成上は、メモリである場合や、ハードディスクやストレージ等である場合などがある。
【0012】
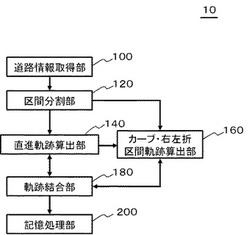
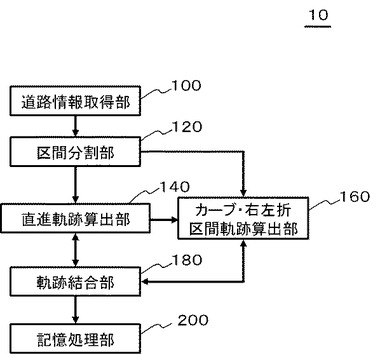
図1は、第1の実施形態に係る走行支援装置10の構成を示すブロック図である。本実施形態に係る走行支援装置10は、道路情報取得部100、区間分割部120、直進軌跡算出部140、カーブ・右左折区間軌跡算出部160、及び軌跡結合部180を備える。道路情報取得部100は、道路情報を取得する。道路情報は、始点と終点をつなぐ道路の形状を示す情報である。区間分割部120は、道路情報に基づいて、道路情報をカーブ・右左折区間であることを示すカーブ・右左折区間情報と、直進区間であることを示す直進区間情報と、に分割する。ここでの分割は、道路の線形形状を示す線形形状情報を用いて行われる。線形形状情報は、例えば曲率の大きさを示す情報(曲率や曲率変化率を示す情報)を含んでいる。以下の説明では、曲率の大きさを示す情報を用いる場合を想定して行う。直進軌跡算出部140は、直進区間情報に基づいて、直進区間における走行軌跡である直進区間軌跡を算出する。カーブ・右左折区間軌跡算出部160は、カーブ・右左折区間情報に基づいて、カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、直進区間軌跡とは異なる方法で算出する。軌跡結合部180は、カーブ・右左折区間軌跡と、直進区間軌跡とを結合することにより、始点と終点をつなぐ道路の全域における走行軌跡を定義する。以下、詳細に説明する。
【0013】
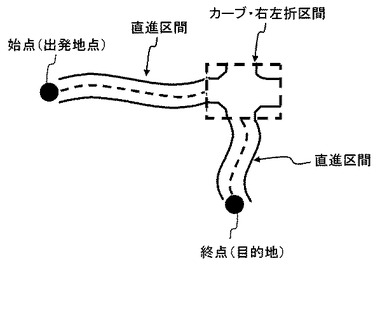
まず走行支援装置10の詳細を説明する前に、図2を用いて走行支援装置10が行う処理の考え方を説明する。車両などの移動体が自動走行を行うためには、始点(例えば出発地点)から終点(例えば目的地)までのルートを探索した上で、そのルートにおける走行軌跡を具体的に設定する必要がある。一般的に終点までのルートには、交差点など、曲率の変化が大きい場所を含む場合がほとんどである。走行支援装置10は、始点から終点までのルートを、曲率が基準値以上であるカーブ・右左折区間と、曲率が基準値未満である直進区間とに分割し、カーブ・右左折区間と直進区間とで、別々のアルゴリズムを用いて走行軌跡を算出する。
【0014】
道路情報取得部100が取得する道路情報は、道路の等級を示す情報、交差点であることを示す交差点情報と、交差点の相互間を接続する直進部であることを示す直進部情報とを含んでいる。交差点情報は、交差点の始点、終点、及び縁石の位置を示す3次元位置情報を含んでいる。この3次元位置情報は、例えば測量などにより予め定められている。また直進部情報は、直進部のセンターラインの位置を示す3次元位置情報、及び直進部の幅を示す幅情報を含んでいる。センターラインの3次元位置情報は、例えば以下のようにして定められる。まず、車両に計測装置を搭載する。次いで、この車両で直進部を走行しつつ計測装置でセンターラインの3次元的な位置を計測する。なおこの方法では、センターラインの3次元位置情報のみではなく、上述した交差点情報を含めた各種の道路の3次元位置情報を計測により求めることができる。
【0015】
次に、図1を用いて走行支援装置10の詳細について説明する。区間分割部120は、道路情報取得部100が取得した交差点情報及びセンターラインの3次元位置情報に基づいて、道路を直進区間とカーブ・右左折区間とに分割し、直進区間情報及びカーブ・右左折区間情報を生成する。直進区間情報及びカーブ・右左折区間情報には、共に、上述した道路情報のうちその区間に該当する部分の情報と、その区間の始点及び終点の位置を示す3次元位置情報が含まれている。区間分割部120が行う具体的な処理については、フローチャートを用いて後述する。
【0016】
直進軌跡算出部140は、区間分割部120によって直進区間として認識された区間の直進区間情報を取得する。そして直進軌跡算出部140は、例えばB−スプライン曲線を用いることにより、直進区間軌跡を算出する。
【0017】
カーブ・右左折区間軌跡算出部160は、区間分割部120によってカーブ・右左折区間として認識された区間のカーブ・右左折区間情報を取得する。そしてカーブ・右左折区間軌跡算出部160は、直進軌跡算出部140とは異なるアルゴリズムを用いて、カーブ・右左折区間軌跡を算出する。カーブ・右左折区間軌跡算出部160が行う具体的な処理については、フローチャートを用いて後述する。
【0018】
軌跡結合部180は、カーブ・右左折区間軌跡と、直進区間軌跡とを結合することにより、道路情報取得部100が取得した道路情報に示される道路における走行軌跡を定義する。具体的には、軌跡結合部180は、あるカーブ・右左折区間軌跡又は直進区間軌跡の終端と、その次に位置するカーブ・右左折区間軌跡又は直進区間軌跡の始端とを重ねる処理を順次行うことにより、道路全体の走行軌跡を定義する。
【0019】
記憶処理部200は、軌跡結合部180が算出した走行軌跡を記憶手段に記憶させる処理を行う。ここで記憶手段は、持ち運びが可能なリムーバブルメディアであってもよいし、ストレージやハードディスクなどの据え置き型の記憶装置であってもよい。また記憶処理部200は、インターネットなどの通信回線を介して、物理的に離れている場所に設置されている記憶装置に走行軌跡を記憶させてもよい。
【0020】
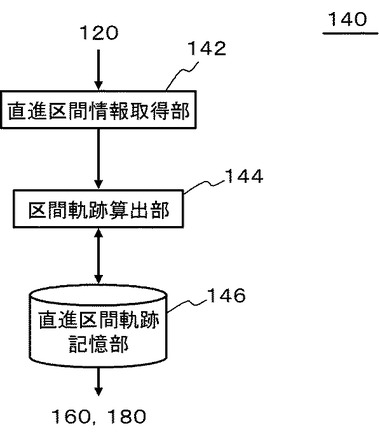
図3は、直進軌跡算出部140の機能構成を示すブロック図である。直進軌跡算出部140は、直進区間情報取得部142、区間軌跡算出部144、及び直進区間軌跡記憶部146を備えている。
【0021】
直進区間情報取得部142は、区間分割部120が生成した直進区間情報を取得する。区間軌跡算出部144は、直進区間情報を用いて、例えばB−スプライン曲線を用いた処理を行うことにより、直進区間それぞれごとに直進区間軌跡を算出する。ここで区間軌跡算出部144は、複数の直進区間がある場合、始点に近い側から順、又は終点に近い側から順に、直進区間軌跡を算出する。直進区間軌跡記憶部146は、区間軌跡算出部144が算出した直進区間軌跡を記憶する。
【0022】
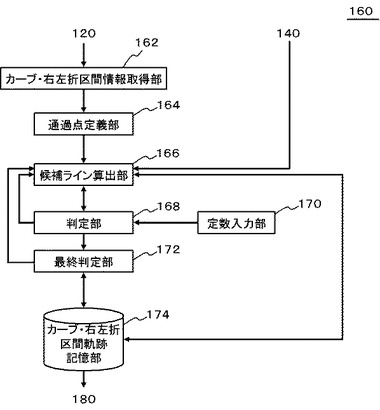
図4は、カーブ・右左折区間軌跡算出部160の機能構成を示すブロック図である。カーブ・右左折区間軌跡算出部160は、カーブ・右左折区間情報取得部162、通過点定義部164、候補ライン算出部166、判定部168、定数入力部170、最終判定部172、及びカーブ・右左折区間軌跡記憶部174を備えている。
【0023】
カーブ・右左折区間情報取得部162は、区間分割部120が生成したカーブ・右左折区間情報を取得する。通過点定義部164は、カーブ・右左折区間別に、そのカーブ・右左折区間における経路が通過すべき通過点の3次元位置情報を、少なくとも1つ定める。ただし、ここで通過点を定めなくても、始点及び終点のみで後述する処理を行えることもある。通過点定義部164は通過点の3次元位置情報を定める。候補ライン算出部166は、通過点、並びにカーブ・右左折区間の始点及び終点に基づいて、カーブ・右左折区間軌跡の候補である候補ラインを算出する。候補ライン算出部166は、例えばB−スプライン曲線を用いて候補ラインを算出する。
【0024】
判定部168は、候補ラインの曲率及び曲率変化率に基づいて、候補ラインの妥当性を判断し、候補ラインが妥当であると判断したときに当該候補ラインをカーブ・右左折区間軌跡として定める。具体的には、判定部168は、下記(1)式により定められるE(X)が最小であると判断したときに、その候補ラインをカーブ・右左折区間軌跡として定める。
【数1】

ただし、κは候補ラインの曲率であり、κ′は候補ラインの曲率変化率であり、sは候補ラインの曲線長であり、Xはカーブ・右左折区間の始点、終点、及び通過点を含む変数組であり、a及びbは定数である。またa+bは、例えば1であるように定められているが、これに限定されない。
【0025】
定数入力部170は、式(1)における定数a及びbの入力を受け付ける。判定部168は、定数入力部170に入力された定数a及びbを用いて、上述した判定を行う。
【0026】
式(1)のうち第1項は、候補ラインの曲率の線積分値であり、第2項は、候補ラインの曲率変化率の線積分値である。そして定数a及びbは、これら第1項及び第2項のうちいずれを重要視するかによって、それらの値が定められる。定数a及びbは、カーブ・右左折区間の形状等によって適宜定められる。
【0027】
最終判定部172は、判定部168によって定められたカーブ・右左折区間軌跡が、予め定められた許容条件を満たしているか否かを判断する。ここで用いられる許容条件は、走行軌跡の曲率の許容範囲、走行軌跡の勾配の許容値、道路の端や縁石からの距離の許容値、軌道の縦断方向の勾配又は横断方向の勾配の許容値である。これら許容条件は予め定められており、最終判定部172は、図示しない記憶手段からこれら許容条件を読み込む。
【0028】
カーブ・右左折区間軌跡記憶部174は、最終判定部172によって許容条件を満たしていると判断されたカーブ・右左折区間軌跡を記憶する。
【0029】
なお、図1、図3、及び図4に示した走行支援装置10の各構成要素は、ハードウエア単位の構成ではなく、機能単位のブロックを示している。走行支援装置10の各構成要素は、任意のコンピュータのCPU、メモリ、メモリにロードされた本図の構成要素を実現するプログラム、そのプログラムを格納するハードディスクなどの記憶ユニット、ネットワーク接続用インタフェースを中心にハードウエアとソフトウエアの任意の組合せによって実現される。そして、その実現方法、装置には様々な変形例があることは、当業者には理解されるところである。
【0030】
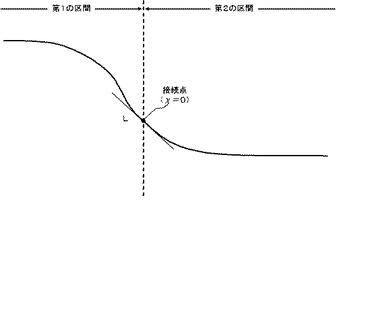
図5は、直進軌跡算出部140及びカーブ・右左折区間軌跡算出部160が走行軌跡を算出するときの条件の一部を説明するための概念図である。上記したように軌跡結合部180は、あるカーブ・右左折区間軌跡又は直進区間軌跡の終端と、その次に位置するカーブ・右左折区間軌跡又は直進区間軌跡の始端とを重ねる処理を順次行う。ここで2つの走行軌跡のつながりを滑らかにするためには、走行軌跡の終端及びその次の走行軌跡の始端それぞれにおいて、曲率χを0にして、かつ接線方向を一致させるのが好ましい。そこで直進軌跡算出部140及びカーブ・右左折区間軌跡算出部160は、いずれも、走行軌跡の始端及び終端それぞれにおいて、曲率χを0にして、かつ接線Lを、その部分に接続する他の走行軌跡の端部における接線方向に一致させることを、カーブ・右左折区間軌跡又は直進区間軌跡の設定条件に加えている。
【0031】
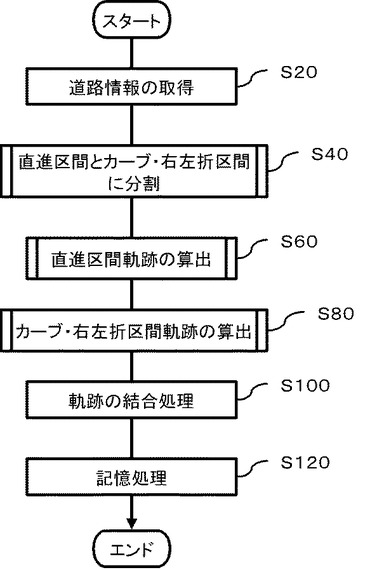
図6は、走行支援装置10が行う処理を説明するためのフローチャートである。まず道路情報取得部100は、始点と終点をつなぐ道路に関する道路情報を取得する(ステップS20)。道路情報取得部100は、例えば以下のようにして道路情報を取得する。道路情報取得部100は、さまざまな道路の道路情報を記憶しているデータベースから情報を取得することが可能になっている。まず道路情報取得部100は、走行支援装置10に入力された情報から、始点と終点を特定する情報を認識する。そして道路情報取得部100は、認識した始点と終点に基づいて、始点から終点までの経路を認識し、その経路に相当する道路の道路情報をデータベースから取得する。
【0032】
次いで区間分割部120は、道路情報取得部100が取得した道路情報が示す道路を、直進区間とカーブ・右左折区間に分割し、直進区間情報及びカーブ・右左折区間情報を生成する(ステップS40)。
【0033】
次いで直進軌跡算出部140は、直進区間軌跡の算出処理を行う(ステップS60)。次いでカーブ・右左折区間軌跡算出部160は、カーブ・右左折区間軌跡の算出処理を行う(ステップS80)。その後、軌跡結合部180は各走行軌跡の結合処理を行い、始点と終点をつなぐ道路の全域における走行軌跡を定義する(ステップS100)。そして記憶処理部200は、ステップS100で定義された走行軌跡を記憶する処理を行う(ステップS120)。
【0034】
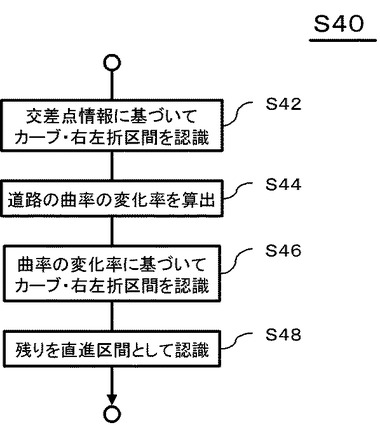
図7は、図6のステップS40、すなわち区間分割部120が行う処理の詳細を説明するためのフローチャートである。上述したように、道路情報には交差点情報、及びセンターラインの3次元位置情報が含まれている。そこで区間分割部120は、まず交差点情報によって定められている区間をカーブ・右左折区間として認識する(ステップS42)。また区間分割部120は、センターラインの3次元位置情報に基づいて道路の曲率の変化率を算出し(ステップS44)、この変化率が基準値以上の領域をカーブ・右左折区間として認識する(ステップS46)。そして区間分割部120は、カーブ・右左折区間として認識されなかった区間を直進区間として認識する(ステップS48)。
【0035】
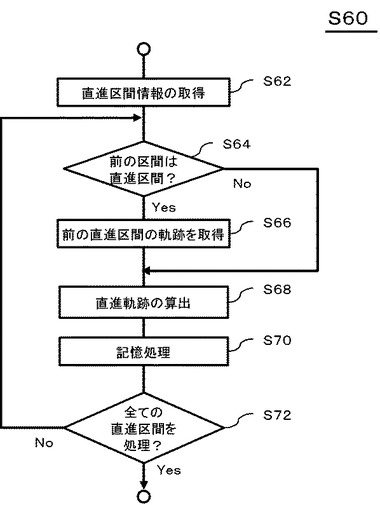
図8は、図6のステップS60、すなわち直進軌跡算出部140が行う処理の詳細を説明するためのフローチャートである。まず直進区間情報取得部142は、区間分割部120から直進区間情報を取得する(ステップS62)。複数の直進区間がある場合、直進区間情報取得部142は複数の直進区間それぞれに対応する直進区間情報を取得する。
【0036】
次いで区間軌跡算出部144は、始点に近い順、又は終点に近い順に直進区間を選択し、選択した直進区間における直進区間軌跡を、以下のようにして算出する。なお以下の説明は、始点に近い順に直進区間を選択する場合を示している。
【0037】
まず区間軌跡算出部144は、選択した直進区間の前に位置する区間が直進区間である場合(ステップS64:Yes)、その直進区間の直進区間軌跡を直進区間軌跡記憶部146から取得する(ステップS66)。
【0038】
そして区間軌跡算出部144は、選択した直進区間の直進区間情報を用いて、直進区間軌跡を算出する(ステップS68)。直進軌跡算出部140は、例えばB−スプライン曲線を用いることにより、直進区間軌跡を算出する。例えば直線軌跡算出部140は、後述する式(2)を用いて直線区間軌跡を算出する。ただし直進区間軌跡の算出処理には様々な方法を用いることができる。この処理において区間軌跡算出部144は、直進区間軌跡の始端及び終端それぞれにおいて曲率が0となるようにする。また区間軌跡算出部144は、前の区間が直進区間であり、その直進区間の直進区間情報を取得している場合、図5を用いて説明したように、現在選択している直進区間の直進区間軌跡の始端の接線方向が、ステップS64において取得した直進区間軌跡の終端の接線方向と一致するようにする。
【0039】
そして区間軌跡算出部144は、算出した直進区間軌跡を直進区間軌跡記憶部146に記憶させる。そして区間軌跡算出部144は、ステップS64〜ステップS70に示した処理を、全ての直進区間に対して行う(ステップS72)。
【0040】
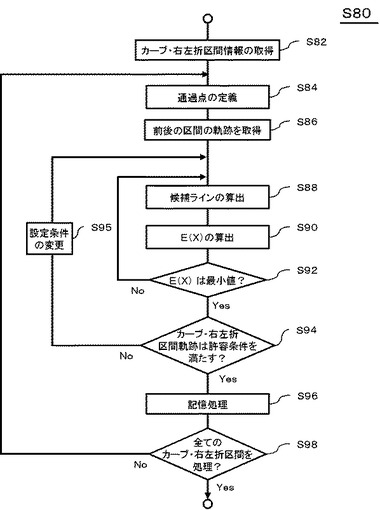
図9は、図6のステップS80、すなわちカーブ・右左折区間軌跡算出部160が行う処理の詳細を説明するためのフローチャートである。本図に示す処理において、式(1)におけるa,bは、予め定数入力部170を介して判定部168に入力されている。
【0041】
まずカーブ・右左折区間情報取得部162は、区間分割部120からカーブ・右左折区間情報を取得する(ステップS82)。複数のカーブ・右左折区間がある場合、カーブ・右左折区間情報取得部162は複数のカーブ・右左折区間それぞれに対応するカーブ・右左折区間情報を取得する。
【0042】
次いでカーブ・右左折区間軌跡算出部160は、始点に近い順、又は終点に近い順にカーブ・右左折区間を選択し、選択したカーブ・右左折区間に対して以下の処理を行う。なお以下の説明は、始点に近い順にカーブ・右左折区間を選択する場合を示している。
【0043】
まず通過点定義部164は、選択したカーブ・右左折区間における経路が通過すべき通過点の3次元位置情報を、少なくとも1つ定める(ステップS84)。次いで候補ライン算出部166は、選択したカーブ・右左折区間の前に位置する区間が直進区間である場合は、その直進区間の直進区間軌跡を直進区間軌跡記憶部146から取得し、選択したカーブ・右左折区間の前に位置する区間がカーブ・右左折区間である場合は、そのカーブ・右左折区間のカーブ・右左折区間軌跡をカーブ・右左折区間軌跡記憶部174から取得する。また候補ライン算出部166は、選択したカーブ・右左折区間の後に位置する区間が直進区間である場合は、その直進区間の直進区間軌跡を直進区間軌跡記憶部146から取得する(ステップS86)。
【0044】
次いで候補ライン算出部166、判定部168、及び最終判定部172は、始点に近い順にカーブ・右左折区間を選択し、選択したカーブ・右左折区間におけるカーブ・右左折区間軌跡を、以下のようにして算出する。
【0045】
まず候補ライン算出部166は、通過点、並びにカーブ・右左折区間の始点及び終点に基づいて、カーブ・右左折区間軌跡の候補である候補ラインを算出する(ステップS88)。
【0046】
候補ライン算出部166は、B−スプライン曲線を用いて候補ラインを算出する場合、まずカーブ・右左折区間の始端、終端、及び通過点それぞれの3次元位置情報を認識する。また候補ライン算出部166は、ステップS86において取得した走行軌跡のうち、現在処理しているカーブ・右左折区間の前の区間における走行軌跡の終端の接線方向を、候補ラインの始点における接線方向として認識する。さらに候補ライン算出部166は、ステップS86において、現在処理しているカーブ・右左折区間の後の区間における走行軌跡を取得している場合、その走行軌跡の始端の接線方向を、候補ラインの終端における接線方向として認識する。
【0047】
次いで候補ライン算出部166は、認識した3次元位置情報および接線方向を用いて、B−スプライン曲線における制御点(P1,P2,・・・,Pn)を算出する。制御点は、例えば3次元位置情報および接線方向を正規化して、自由変数にマッピングすることにより算出される。次いで候補ライン算出部166は、制御点及び既定関数Ni,pを用いて、以下の式(2)に基づいて、候補ラインr(t)を生成する。
【0048】
【数2】
ここでαは現在処理しているカーブ・右左折区間の始端であり、βは現在処理しているカーブ・右左折区間の終端である。tは、αとβの間で正規化されている変数である。なお上述したB−スプライン曲線を用いて候補ラインを算出する処理は、上述した直進区間軌跡の算出にも用いられる。
【0049】
次いで判定部168は、上述した式(1)を用いて、候補ラインにおけるE(X)の値を算出する(ステップS90)。そして判定部168は、E(X)が最小値であると判断したときに、そのときの候補ラインを、カーブ・右左折区間軌跡として認識する(ステップS92:Yes)。なお判定部168は、E(X)が最小値ではないと判断したとき(ステップS92:No)、今回算出したE(X)の値を記憶した後、候補ライン算出部166に制御点を変更させた上で、ステップS88〜ステップS92の処理を再び行わせる。
【0050】
そして最終判定部172は、判定部168によって定められたカーブ・右左折区間軌跡が、予め定められた許容条件を満たしているか否かを判断する(ステップS94)。最終判定部172は、カーブ・右左折区間軌跡が許容条件を満たしていると判断したとき(ステップS94:Yes)、カーブ・右左折区間軌跡をカーブ・右左折区間軌跡記憶部174に記憶させる(ステップS96)。また最終判定部172は、カーブ・右左折区間軌跡が許容条件を満たしていないと判断したとき(ステップS94:No)、式(1)における定数a,bなどの設定情報を変更した(ステップS95)上で、ステップS88〜ステップS94に示した処理を再度行う。なおこの設定情報の変更は、走行支援装置10が行ってもよいし、走行支援装置10の使用者が行ってもよい。
【0051】
カーブ・右左折区間軌跡算出部160は、ステップS84〜ステップS96に示した処理を、全てのカーブ・右左折区間に対して行う(ステップS98)
【0052】
次に、本実施形態の作用及び効果について説明する。本実施形態によれば、始点と終点を結ぶ道路を、直進区間とカーブ・右左折区間とに分割し、直進区間とカーブ・右左折区間とで別々の方法を用いて走行軌跡を算出している。このため、道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができる
【0053】
またカーブ・右左折区間軌跡を算出するカーブ・右左折区間軌跡算出部160は、カーブ・右左折区間軌跡の候補である候補ラインの曲率及び曲率変化率に基づいて、その候補ラインの妥当性を判断している。そして候補ラインが妥当であると判断したときに、その候補ラインをカーブ・右左折区間軌跡を定めている。従って、滑らかなカーブ・右左折区間軌跡を得ることができる。
【0054】
またカーブ・右左折区間軌跡算出部160は、上述した式(1)を用いて候補ラインの妥当性を判断している。ここで式(1)における定数a及びbを、カーブ・右左折区間の形状等によって適宜定めることにより、さらに滑らかなカーブ・右左折区間軌跡を得ることができる。
【0055】
また直進軌跡算出部140及びカーブ・右左折区間軌跡算出部160は、いずれも走行軌跡の始端及び終端の曲率が0となるようにしている。このため、互いに前後している2つの走行軌跡をつなぐときに、つなぎ目を滑らかにすることができる。
【0056】
特に本実施形態では、ある走行軌跡の終端の接線方向と、その次の起動の始端の接線方向とを互いに一致させている。このため、互いに前後している2つの走行軌跡をつなぐときに、つなぎ目をさらに滑らかにすることができる。
【0057】
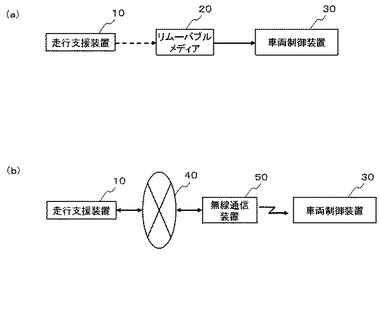
図10の各図は、第2の実施形態に係る走行支援システムの構成を示す図である。この走行支援システムは、走行支援装置10及び車両制御装置30を備えている。走行支援装置10の構成は第1の実施形態と同様である。車両制御装置30は、自動車等の車両を自動運転するための装置であり、出発地から目的地までの経路を示す経路情報を、走行支援装置10から取得する。経路情報には、第1の実施形態で示した走行軌跡を示す情報が含まれている。
【0058】
図10(a)に示す例では、経路情報は、リムーバブルメディア20を介して車両制御装置30に渡される。図10(b)に示す例では、経路情報は、インターネット等の通信網40及び無線通信装置50を介して、車両制御装置30に渡される。なお走行支援装置10が経路情報を車両制御装置30に渡す経路は、これらの例に限定されない。
【0059】
以上、図面を参照して本発明の実施形態について述べたが、これらは本発明の例示であり、上記以外の様々な構成を採用することもできる。
【符号の説明】
【0060】
10 走行支援装置
20 リムーバブルメディア
30 車両制御装置
40 通信網
50 無線通信装置
100 道路情報取得部
120 区間分割部
140 直進軌跡算出部
142 直進区間情報取得部
144 区間軌跡算出部
146 直進区間軌跡記憶部
160 カーブ・右左折区間軌跡算出部
162 カーブ・右左折区間情報取得部
164 通過点定義部
166 候補ライン算出部
168 判定部
170 定数入力部
172 最終判定部
174 カーブ・右左折区間軌跡記憶部
180 軌跡結合部
200 記憶処理部
【技術分野】
【0001】
本発明は、道路において移動体が進むべき走行軌跡を算出することにより、移動体の走行を支援する走行支援装置、走行支援方法、及びプログラムに関する。
【背景技術】
【0002】
近年、自動車などの移動体の走行を支援する走行支援システムの開発が進められている。走行支援システムを実現することにより、自動車を自動走行、例えば隊列走行させることが可能になる。この走行支援システムの主な機能の一つに、道路において移動体が進むべき走行軌跡を算出することが挙げられる。例えば特許文献1には、移動体が進むべき走行軌跡を、B−スプライン曲線を用いて3次元的に算出することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−294446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した特許文献の技術を含め、今までの走行軌跡算出方法は、経路の曲率の変化が小さい場合を想定したものがほとんどである。しかし、一般道や高速道路を含む公道など、通常通行する道路において目的地に到達するまでには、交差点などの曲率の変化が大きい場所を通過する必要がある場合がほとんどである。このため、従来の走行軌跡の算出方法では、通常通行する道路において走行軌跡を高い精度で算出することは難しいことが判明した。
【0005】
本発明の目的は、始点と終点をつなぐ道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができる走行支援装置、走行支援方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
本発明によれば、始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する直進軌跡算出手段と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡算出手段とは異なる方法で算出する曲線軌跡算出手段と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定める軌跡結合手段と、
を備える走行支援装が提供される。
【0007】
本発明によれば、コンピュータが、始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出し、
前記コンピュータが、前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出し、
前記コンピュータが、前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する走行支援方法が提供される。
【0008】
本発明によれば、コンピュータを、道路で走行すべき走行軌跡を算出する走行支援装置として機能させるためのプログラムであって、
前記コンピュータに、
始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する機能と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出する機能と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する機能と、
を実現させるプログラムが提供される。
【発明の効果】
【0009】
本発明によれば、始点と終点をつなぐ道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができる。
【図面の簡単な説明】
【0010】
【図1】第1の実施形態に係る走行支援装置の構成を示すブロック図である。
【図2】走行支援装置が行う処理の考え方を説明する図である。
【図3】直進軌跡算出部の機能構成を示すブロック図である。
【図4】カーブ・右左折区間軌跡算出部の機能構成を示すブロック図である。
【図5】直進軌跡算出部及びカーブ・右左折区間軌跡算出部が走行軌跡を算出するときの条件の一部を説明するための概念図である。
【図6】走行支援装置が行う処理を説明するためのフローチャートである。
【図7】図6のステップS40の詳細を説明するためのフローチャートである。
【図8】図6のステップS60の詳細を説明するためのフローチャートである。
【図9】図6のステップS80の詳細を説明するためのフローチャートである。
【図10】第2の実施形態に係る走行支援システムの構成を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態について、図面を用いて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。なお、以下の実施形態において「記憶」には、メモリ上に一時的に記憶する場合と、ハードディスクなどに記憶させて保存する場合の双方が含まれる。このため、記憶部は、ハード構成上は、メモリである場合や、ハードディスクやストレージ等である場合などがある。
【0012】
図1は、第1の実施形態に係る走行支援装置10の構成を示すブロック図である。本実施形態に係る走行支援装置10は、道路情報取得部100、区間分割部120、直進軌跡算出部140、カーブ・右左折区間軌跡算出部160、及び軌跡結合部180を備える。道路情報取得部100は、道路情報を取得する。道路情報は、始点と終点をつなぐ道路の形状を示す情報である。区間分割部120は、道路情報に基づいて、道路情報をカーブ・右左折区間であることを示すカーブ・右左折区間情報と、直進区間であることを示す直進区間情報と、に分割する。ここでの分割は、道路の線形形状を示す線形形状情報を用いて行われる。線形形状情報は、例えば曲率の大きさを示す情報(曲率や曲率変化率を示す情報)を含んでいる。以下の説明では、曲率の大きさを示す情報を用いる場合を想定して行う。直進軌跡算出部140は、直進区間情報に基づいて、直進区間における走行軌跡である直進区間軌跡を算出する。カーブ・右左折区間軌跡算出部160は、カーブ・右左折区間情報に基づいて、カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、直進区間軌跡とは異なる方法で算出する。軌跡結合部180は、カーブ・右左折区間軌跡と、直進区間軌跡とを結合することにより、始点と終点をつなぐ道路の全域における走行軌跡を定義する。以下、詳細に説明する。
【0013】
まず走行支援装置10の詳細を説明する前に、図2を用いて走行支援装置10が行う処理の考え方を説明する。車両などの移動体が自動走行を行うためには、始点(例えば出発地点)から終点(例えば目的地)までのルートを探索した上で、そのルートにおける走行軌跡を具体的に設定する必要がある。一般的に終点までのルートには、交差点など、曲率の変化が大きい場所を含む場合がほとんどである。走行支援装置10は、始点から終点までのルートを、曲率が基準値以上であるカーブ・右左折区間と、曲率が基準値未満である直進区間とに分割し、カーブ・右左折区間と直進区間とで、別々のアルゴリズムを用いて走行軌跡を算出する。
【0014】
道路情報取得部100が取得する道路情報は、道路の等級を示す情報、交差点であることを示す交差点情報と、交差点の相互間を接続する直進部であることを示す直進部情報とを含んでいる。交差点情報は、交差点の始点、終点、及び縁石の位置を示す3次元位置情報を含んでいる。この3次元位置情報は、例えば測量などにより予め定められている。また直進部情報は、直進部のセンターラインの位置を示す3次元位置情報、及び直進部の幅を示す幅情報を含んでいる。センターラインの3次元位置情報は、例えば以下のようにして定められる。まず、車両に計測装置を搭載する。次いで、この車両で直進部を走行しつつ計測装置でセンターラインの3次元的な位置を計測する。なおこの方法では、センターラインの3次元位置情報のみではなく、上述した交差点情報を含めた各種の道路の3次元位置情報を計測により求めることができる。
【0015】
次に、図1を用いて走行支援装置10の詳細について説明する。区間分割部120は、道路情報取得部100が取得した交差点情報及びセンターラインの3次元位置情報に基づいて、道路を直進区間とカーブ・右左折区間とに分割し、直進区間情報及びカーブ・右左折区間情報を生成する。直進区間情報及びカーブ・右左折区間情報には、共に、上述した道路情報のうちその区間に該当する部分の情報と、その区間の始点及び終点の位置を示す3次元位置情報が含まれている。区間分割部120が行う具体的な処理については、フローチャートを用いて後述する。
【0016】
直進軌跡算出部140は、区間分割部120によって直進区間として認識された区間の直進区間情報を取得する。そして直進軌跡算出部140は、例えばB−スプライン曲線を用いることにより、直進区間軌跡を算出する。
【0017】
カーブ・右左折区間軌跡算出部160は、区間分割部120によってカーブ・右左折区間として認識された区間のカーブ・右左折区間情報を取得する。そしてカーブ・右左折区間軌跡算出部160は、直進軌跡算出部140とは異なるアルゴリズムを用いて、カーブ・右左折区間軌跡を算出する。カーブ・右左折区間軌跡算出部160が行う具体的な処理については、フローチャートを用いて後述する。
【0018】
軌跡結合部180は、カーブ・右左折区間軌跡と、直進区間軌跡とを結合することにより、道路情報取得部100が取得した道路情報に示される道路における走行軌跡を定義する。具体的には、軌跡結合部180は、あるカーブ・右左折区間軌跡又は直進区間軌跡の終端と、その次に位置するカーブ・右左折区間軌跡又は直進区間軌跡の始端とを重ねる処理を順次行うことにより、道路全体の走行軌跡を定義する。
【0019】
記憶処理部200は、軌跡結合部180が算出した走行軌跡を記憶手段に記憶させる処理を行う。ここで記憶手段は、持ち運びが可能なリムーバブルメディアであってもよいし、ストレージやハードディスクなどの据え置き型の記憶装置であってもよい。また記憶処理部200は、インターネットなどの通信回線を介して、物理的に離れている場所に設置されている記憶装置に走行軌跡を記憶させてもよい。
【0020】
図3は、直進軌跡算出部140の機能構成を示すブロック図である。直進軌跡算出部140は、直進区間情報取得部142、区間軌跡算出部144、及び直進区間軌跡記憶部146を備えている。
【0021】
直進区間情報取得部142は、区間分割部120が生成した直進区間情報を取得する。区間軌跡算出部144は、直進区間情報を用いて、例えばB−スプライン曲線を用いた処理を行うことにより、直進区間それぞれごとに直進区間軌跡を算出する。ここで区間軌跡算出部144は、複数の直進区間がある場合、始点に近い側から順、又は終点に近い側から順に、直進区間軌跡を算出する。直進区間軌跡記憶部146は、区間軌跡算出部144が算出した直進区間軌跡を記憶する。
【0022】
図4は、カーブ・右左折区間軌跡算出部160の機能構成を示すブロック図である。カーブ・右左折区間軌跡算出部160は、カーブ・右左折区間情報取得部162、通過点定義部164、候補ライン算出部166、判定部168、定数入力部170、最終判定部172、及びカーブ・右左折区間軌跡記憶部174を備えている。
【0023】
カーブ・右左折区間情報取得部162は、区間分割部120が生成したカーブ・右左折区間情報を取得する。通過点定義部164は、カーブ・右左折区間別に、そのカーブ・右左折区間における経路が通過すべき通過点の3次元位置情報を、少なくとも1つ定める。ただし、ここで通過点を定めなくても、始点及び終点のみで後述する処理を行えることもある。通過点定義部164は通過点の3次元位置情報を定める。候補ライン算出部166は、通過点、並びにカーブ・右左折区間の始点及び終点に基づいて、カーブ・右左折区間軌跡の候補である候補ラインを算出する。候補ライン算出部166は、例えばB−スプライン曲線を用いて候補ラインを算出する。
【0024】
判定部168は、候補ラインの曲率及び曲率変化率に基づいて、候補ラインの妥当性を判断し、候補ラインが妥当であると判断したときに当該候補ラインをカーブ・右左折区間軌跡として定める。具体的には、判定部168は、下記(1)式により定められるE(X)が最小であると判断したときに、その候補ラインをカーブ・右左折区間軌跡として定める。
【数1】
ただし、κは候補ラインの曲率であり、κ′は候補ラインの曲率変化率であり、sは候補ラインの曲線長であり、Xはカーブ・右左折区間の始点、終点、及び通過点を含む変数組であり、a及びbは定数である。またa+bは、例えば1であるように定められているが、これに限定されない。
【0025】
定数入力部170は、式(1)における定数a及びbの入力を受け付ける。判定部168は、定数入力部170に入力された定数a及びbを用いて、上述した判定を行う。
【0026】
式(1)のうち第1項は、候補ラインの曲率の線積分値であり、第2項は、候補ラインの曲率変化率の線積分値である。そして定数a及びbは、これら第1項及び第2項のうちいずれを重要視するかによって、それらの値が定められる。定数a及びbは、カーブ・右左折区間の形状等によって適宜定められる。
【0027】
最終判定部172は、判定部168によって定められたカーブ・右左折区間軌跡が、予め定められた許容条件を満たしているか否かを判断する。ここで用いられる許容条件は、走行軌跡の曲率の許容範囲、走行軌跡の勾配の許容値、道路の端や縁石からの距離の許容値、軌道の縦断方向の勾配又は横断方向の勾配の許容値である。これら許容条件は予め定められており、最終判定部172は、図示しない記憶手段からこれら許容条件を読み込む。
【0028】
カーブ・右左折区間軌跡記憶部174は、最終判定部172によって許容条件を満たしていると判断されたカーブ・右左折区間軌跡を記憶する。
【0029】
なお、図1、図3、及び図4に示した走行支援装置10の各構成要素は、ハードウエア単位の構成ではなく、機能単位のブロックを示している。走行支援装置10の各構成要素は、任意のコンピュータのCPU、メモリ、メモリにロードされた本図の構成要素を実現するプログラム、そのプログラムを格納するハードディスクなどの記憶ユニット、ネットワーク接続用インタフェースを中心にハードウエアとソフトウエアの任意の組合せによって実現される。そして、その実現方法、装置には様々な変形例があることは、当業者には理解されるところである。
【0030】
図5は、直進軌跡算出部140及びカーブ・右左折区間軌跡算出部160が走行軌跡を算出するときの条件の一部を説明するための概念図である。上記したように軌跡結合部180は、あるカーブ・右左折区間軌跡又は直進区間軌跡の終端と、その次に位置するカーブ・右左折区間軌跡又は直進区間軌跡の始端とを重ねる処理を順次行う。ここで2つの走行軌跡のつながりを滑らかにするためには、走行軌跡の終端及びその次の走行軌跡の始端それぞれにおいて、曲率χを0にして、かつ接線方向を一致させるのが好ましい。そこで直進軌跡算出部140及びカーブ・右左折区間軌跡算出部160は、いずれも、走行軌跡の始端及び終端それぞれにおいて、曲率χを0にして、かつ接線Lを、その部分に接続する他の走行軌跡の端部における接線方向に一致させることを、カーブ・右左折区間軌跡又は直進区間軌跡の設定条件に加えている。
【0031】
図6は、走行支援装置10が行う処理を説明するためのフローチャートである。まず道路情報取得部100は、始点と終点をつなぐ道路に関する道路情報を取得する(ステップS20)。道路情報取得部100は、例えば以下のようにして道路情報を取得する。道路情報取得部100は、さまざまな道路の道路情報を記憶しているデータベースから情報を取得することが可能になっている。まず道路情報取得部100は、走行支援装置10に入力された情報から、始点と終点を特定する情報を認識する。そして道路情報取得部100は、認識した始点と終点に基づいて、始点から終点までの経路を認識し、その経路に相当する道路の道路情報をデータベースから取得する。
【0032】
次いで区間分割部120は、道路情報取得部100が取得した道路情報が示す道路を、直進区間とカーブ・右左折区間に分割し、直進区間情報及びカーブ・右左折区間情報を生成する(ステップS40)。
【0033】
次いで直進軌跡算出部140は、直進区間軌跡の算出処理を行う(ステップS60)。次いでカーブ・右左折区間軌跡算出部160は、カーブ・右左折区間軌跡の算出処理を行う(ステップS80)。その後、軌跡結合部180は各走行軌跡の結合処理を行い、始点と終点をつなぐ道路の全域における走行軌跡を定義する(ステップS100)。そして記憶処理部200は、ステップS100で定義された走行軌跡を記憶する処理を行う(ステップS120)。
【0034】
図7は、図6のステップS40、すなわち区間分割部120が行う処理の詳細を説明するためのフローチャートである。上述したように、道路情報には交差点情報、及びセンターラインの3次元位置情報が含まれている。そこで区間分割部120は、まず交差点情報によって定められている区間をカーブ・右左折区間として認識する(ステップS42)。また区間分割部120は、センターラインの3次元位置情報に基づいて道路の曲率の変化率を算出し(ステップS44)、この変化率が基準値以上の領域をカーブ・右左折区間として認識する(ステップS46)。そして区間分割部120は、カーブ・右左折区間として認識されなかった区間を直進区間として認識する(ステップS48)。
【0035】
図8は、図6のステップS60、すなわち直進軌跡算出部140が行う処理の詳細を説明するためのフローチャートである。まず直進区間情報取得部142は、区間分割部120から直進区間情報を取得する(ステップS62)。複数の直進区間がある場合、直進区間情報取得部142は複数の直進区間それぞれに対応する直進区間情報を取得する。
【0036】
次いで区間軌跡算出部144は、始点に近い順、又は終点に近い順に直進区間を選択し、選択した直進区間における直進区間軌跡を、以下のようにして算出する。なお以下の説明は、始点に近い順に直進区間を選択する場合を示している。
【0037】
まず区間軌跡算出部144は、選択した直進区間の前に位置する区間が直進区間である場合(ステップS64:Yes)、その直進区間の直進区間軌跡を直進区間軌跡記憶部146から取得する(ステップS66)。
【0038】
そして区間軌跡算出部144は、選択した直進区間の直進区間情報を用いて、直進区間軌跡を算出する(ステップS68)。直進軌跡算出部140は、例えばB−スプライン曲線を用いることにより、直進区間軌跡を算出する。例えば直線軌跡算出部140は、後述する式(2)を用いて直線区間軌跡を算出する。ただし直進区間軌跡の算出処理には様々な方法を用いることができる。この処理において区間軌跡算出部144は、直進区間軌跡の始端及び終端それぞれにおいて曲率が0となるようにする。また区間軌跡算出部144は、前の区間が直進区間であり、その直進区間の直進区間情報を取得している場合、図5を用いて説明したように、現在選択している直進区間の直進区間軌跡の始端の接線方向が、ステップS64において取得した直進区間軌跡の終端の接線方向と一致するようにする。
【0039】
そして区間軌跡算出部144は、算出した直進区間軌跡を直進区間軌跡記憶部146に記憶させる。そして区間軌跡算出部144は、ステップS64〜ステップS70に示した処理を、全ての直進区間に対して行う(ステップS72)。
【0040】
図9は、図6のステップS80、すなわちカーブ・右左折区間軌跡算出部160が行う処理の詳細を説明するためのフローチャートである。本図に示す処理において、式(1)におけるa,bは、予め定数入力部170を介して判定部168に入力されている。
【0041】
まずカーブ・右左折区間情報取得部162は、区間分割部120からカーブ・右左折区間情報を取得する(ステップS82)。複数のカーブ・右左折区間がある場合、カーブ・右左折区間情報取得部162は複数のカーブ・右左折区間それぞれに対応するカーブ・右左折区間情報を取得する。
【0042】
次いでカーブ・右左折区間軌跡算出部160は、始点に近い順、又は終点に近い順にカーブ・右左折区間を選択し、選択したカーブ・右左折区間に対して以下の処理を行う。なお以下の説明は、始点に近い順にカーブ・右左折区間を選択する場合を示している。
【0043】
まず通過点定義部164は、選択したカーブ・右左折区間における経路が通過すべき通過点の3次元位置情報を、少なくとも1つ定める(ステップS84)。次いで候補ライン算出部166は、選択したカーブ・右左折区間の前に位置する区間が直進区間である場合は、その直進区間の直進区間軌跡を直進区間軌跡記憶部146から取得し、選択したカーブ・右左折区間の前に位置する区間がカーブ・右左折区間である場合は、そのカーブ・右左折区間のカーブ・右左折区間軌跡をカーブ・右左折区間軌跡記憶部174から取得する。また候補ライン算出部166は、選択したカーブ・右左折区間の後に位置する区間が直進区間である場合は、その直進区間の直進区間軌跡を直進区間軌跡記憶部146から取得する(ステップS86)。
【0044】
次いで候補ライン算出部166、判定部168、及び最終判定部172は、始点に近い順にカーブ・右左折区間を選択し、選択したカーブ・右左折区間におけるカーブ・右左折区間軌跡を、以下のようにして算出する。
【0045】
まず候補ライン算出部166は、通過点、並びにカーブ・右左折区間の始点及び終点に基づいて、カーブ・右左折区間軌跡の候補である候補ラインを算出する(ステップS88)。
【0046】
候補ライン算出部166は、B−スプライン曲線を用いて候補ラインを算出する場合、まずカーブ・右左折区間の始端、終端、及び通過点それぞれの3次元位置情報を認識する。また候補ライン算出部166は、ステップS86において取得した走行軌跡のうち、現在処理しているカーブ・右左折区間の前の区間における走行軌跡の終端の接線方向を、候補ラインの始点における接線方向として認識する。さらに候補ライン算出部166は、ステップS86において、現在処理しているカーブ・右左折区間の後の区間における走行軌跡を取得している場合、その走行軌跡の始端の接線方向を、候補ラインの終端における接線方向として認識する。
【0047】
次いで候補ライン算出部166は、認識した3次元位置情報および接線方向を用いて、B−スプライン曲線における制御点(P1,P2,・・・,Pn)を算出する。制御点は、例えば3次元位置情報および接線方向を正規化して、自由変数にマッピングすることにより算出される。次いで候補ライン算出部166は、制御点及び既定関数Ni,pを用いて、以下の式(2)に基づいて、候補ラインr(t)を生成する。
【0048】
【数2】
ここでαは現在処理しているカーブ・右左折区間の始端であり、βは現在処理しているカーブ・右左折区間の終端である。tは、αとβの間で正規化されている変数である。なお上述したB−スプライン曲線を用いて候補ラインを算出する処理は、上述した直進区間軌跡の算出にも用いられる。
【0049】
次いで判定部168は、上述した式(1)を用いて、候補ラインにおけるE(X)の値を算出する(ステップS90)。そして判定部168は、E(X)が最小値であると判断したときに、そのときの候補ラインを、カーブ・右左折区間軌跡として認識する(ステップS92:Yes)。なお判定部168は、E(X)が最小値ではないと判断したとき(ステップS92:No)、今回算出したE(X)の値を記憶した後、候補ライン算出部166に制御点を変更させた上で、ステップS88〜ステップS92の処理を再び行わせる。
【0050】
そして最終判定部172は、判定部168によって定められたカーブ・右左折区間軌跡が、予め定められた許容条件を満たしているか否かを判断する(ステップS94)。最終判定部172は、カーブ・右左折区間軌跡が許容条件を満たしていると判断したとき(ステップS94:Yes)、カーブ・右左折区間軌跡をカーブ・右左折区間軌跡記憶部174に記憶させる(ステップS96)。また最終判定部172は、カーブ・右左折区間軌跡が許容条件を満たしていないと判断したとき(ステップS94:No)、式(1)における定数a,bなどの設定情報を変更した(ステップS95)上で、ステップS88〜ステップS94に示した処理を再度行う。なおこの設定情報の変更は、走行支援装置10が行ってもよいし、走行支援装置10の使用者が行ってもよい。
【0051】
カーブ・右左折区間軌跡算出部160は、ステップS84〜ステップS96に示した処理を、全てのカーブ・右左折区間に対して行う(ステップS98)
【0052】
次に、本実施形態の作用及び効果について説明する。本実施形態によれば、始点と終点を結ぶ道路を、直進区間とカーブ・右左折区間とに分割し、直進区間とカーブ・右左折区間とで別々の方法を用いて走行軌跡を算出している。このため、道路が曲率の変化が小さい区間と曲率の変化が大きい区間の双方を含んでいても、高い精度で走行軌跡を算出することができる
【0053】
またカーブ・右左折区間軌跡を算出するカーブ・右左折区間軌跡算出部160は、カーブ・右左折区間軌跡の候補である候補ラインの曲率及び曲率変化率に基づいて、その候補ラインの妥当性を判断している。そして候補ラインが妥当であると判断したときに、その候補ラインをカーブ・右左折区間軌跡を定めている。従って、滑らかなカーブ・右左折区間軌跡を得ることができる。
【0054】
またカーブ・右左折区間軌跡算出部160は、上述した式(1)を用いて候補ラインの妥当性を判断している。ここで式(1)における定数a及びbを、カーブ・右左折区間の形状等によって適宜定めることにより、さらに滑らかなカーブ・右左折区間軌跡を得ることができる。
【0055】
また直進軌跡算出部140及びカーブ・右左折区間軌跡算出部160は、いずれも走行軌跡の始端及び終端の曲率が0となるようにしている。このため、互いに前後している2つの走行軌跡をつなぐときに、つなぎ目を滑らかにすることができる。
【0056】
特に本実施形態では、ある走行軌跡の終端の接線方向と、その次の起動の始端の接線方向とを互いに一致させている。このため、互いに前後している2つの走行軌跡をつなぐときに、つなぎ目をさらに滑らかにすることができる。
【0057】
図10の各図は、第2の実施形態に係る走行支援システムの構成を示す図である。この走行支援システムは、走行支援装置10及び車両制御装置30を備えている。走行支援装置10の構成は第1の実施形態と同様である。車両制御装置30は、自動車等の車両を自動運転するための装置であり、出発地から目的地までの経路を示す経路情報を、走行支援装置10から取得する。経路情報には、第1の実施形態で示した走行軌跡を示す情報が含まれている。
【0058】
図10(a)に示す例では、経路情報は、リムーバブルメディア20を介して車両制御装置30に渡される。図10(b)に示す例では、経路情報は、インターネット等の通信網40及び無線通信装置50を介して、車両制御装置30に渡される。なお走行支援装置10が経路情報を車両制御装置30に渡す経路は、これらの例に限定されない。
【0059】
以上、図面を参照して本発明の実施形態について述べたが、これらは本発明の例示であり、上記以外の様々な構成を採用することもできる。
【符号の説明】
【0060】
10 走行支援装置
20 リムーバブルメディア
30 車両制御装置
40 通信網
50 無線通信装置
100 道路情報取得部
120 区間分割部
140 直進軌跡算出部
142 直進区間情報取得部
144 区間軌跡算出部
146 直進区間軌跡記憶部
160 カーブ・右左折区間軌跡算出部
162 カーブ・右左折区間情報取得部
164 通過点定義部
166 候補ライン算出部
168 判定部
170 定数入力部
172 最終判定部
174 カーブ・右左折区間軌跡記憶部
180 軌跡結合部
200 記憶処理部
【特許請求の範囲】
【請求項1】
始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する直進軌跡算出手段と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡算出手段とは異なる方法で算出する曲線軌跡算出手段と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定める軌跡結合手段と、
を備える走行支援装置。
【請求項2】
請求項1に記載の走行支援装置において、
前記直進区間は曲率が基準値未満の区間であり、前記カーブ・右左折区間は曲率が基準値以上の区間である走行支援装置。
【請求項3】
請求項1又は2に記載の走行支援装置において、
前記始点と前記終点をつなぐ道路の形状を示す道路情報を取得する道路情報取得手段と、
前記道路情報に基づいて、前記道路情報を、前記カーブ・右左折区間情報と前記直進区間情報とに分割する道路分割手段と、
を備える走行支援装置。
【請求項4】
請求項3に記載の走行支援装置において、
前記道路情報は、前記道路の特定区間が交差点であることを示す交差点情報を含んでおり、
前記道路分割手段は、前記交差点情報によって定められる区間をカーブ・右左折区間として認識する走行支援装置。
【請求項5】
請求項3又は4に記載の走行支援装置において、
前記道路分割手段は、前記道路の曲率を算出することにより、前記カーブ・右左折区間を認識する走行支援装置。
【請求項6】
請求項1〜5のいずれか一項に記載の走行支援装置において、
前記曲線軌跡算出手段は、
前記カーブ・右左折区間の少なくとも始端及び終端に基づいて、前記カーブ・右左折区間軌跡の候補である候補ラインを算出する候補ライン算出手段と、
前記候補ラインの曲率に基づいて、前記候補ラインの妥当性を判断し、前記候補ラインが妥当であると判断したときに当該候補ラインを前記カーブ・右左折区間軌跡として定める判定手段と、
を備える走行支援装置。
【請求項7】
請求項6に記載の走行支援装置において、
前記判定手段は、下記(1)式により定められるE(X)が最小であると判断したときに前記候補ラインを前記カーブ・右左折区間軌跡として定める走行支援装置。
【数1】
ただし、κ:前記候補ラインの曲率、κ′:前記候補ラインの曲率変化率、s:前記候補ラインの曲線長、X:前記カーブ・右左折区間の始点、終点、及び通過点を含む変数組、a及びb:定数。
【請求項8】
請求項7に記載の走行支援装置において、
前記a及び前記bの入力を受け付ける定数入力手段をさらに備え、
前記判定手段は、前記定数入力手段に入力された前記a及び前記bを用いる走行支援装置。
【請求項9】
請求項1〜8のいずれか一項に記載の走行支援装置において、
前記曲線軌跡算出手段は、前記カーブ・右左折区間軌跡の始端及び終端の曲率が0となるように前記カーブ・右左折区間軌跡を算出し、
前記直進軌跡算出手段は、前記直進軌跡の始端及び終端の曲率が0となるように前記カーブ・右左折区間軌跡を算出する走行支援装置。
【請求項10】
請求項9に記載の走行支援装置において、
前記曲線軌跡算出手段は、前記直進軌跡算出手段が前記直進軌跡を算出した後に前記カーブ・右左折区間軌跡を前記道路の前記始点に近い順又は遠い順に算出し、かつ前記カーブ・右左折区間軌跡の始端及び終端における接線方向を、当該始端又は終端に接続する前記直進区間軌跡又は前記カーブ・右左折区間軌跡の端部における接線方向に一致させる走行支援装置。
【請求項11】
コンピュータが、始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出し、
前記コンピュータが、前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出し、
前記コンピュータが、前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する走行支援方法。
【請求項12】
コンピュータを、道路で走行すべき走行軌跡を算出する走行支援装置として機能させるためのプログラムであって、
前記コンピュータに、
始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する機能と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出する機能と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する機能と、
を実現させるプログラム。
【請求項1】
始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する直進軌跡算出手段と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡算出手段とは異なる方法で算出する曲線軌跡算出手段と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定める軌跡結合手段と、
を備える走行支援装置。
【請求項2】
請求項1に記載の走行支援装置において、
前記直進区間は曲率が基準値未満の区間であり、前記カーブ・右左折区間は曲率が基準値以上の区間である走行支援装置。
【請求項3】
請求項1又は2に記載の走行支援装置において、
前記始点と前記終点をつなぐ道路の形状を示す道路情報を取得する道路情報取得手段と、
前記道路情報に基づいて、前記道路情報を、前記カーブ・右左折区間情報と前記直進区間情報とに分割する道路分割手段と、
を備える走行支援装置。
【請求項4】
請求項3に記載の走行支援装置において、
前記道路情報は、前記道路の特定区間が交差点であることを示す交差点情報を含んでおり、
前記道路分割手段は、前記交差点情報によって定められる区間をカーブ・右左折区間として認識する走行支援装置。
【請求項5】
請求項3又は4に記載の走行支援装置において、
前記道路分割手段は、前記道路の曲率を算出することにより、前記カーブ・右左折区間を認識する走行支援装置。
【請求項6】
請求項1〜5のいずれか一項に記載の走行支援装置において、
前記曲線軌跡算出手段は、
前記カーブ・右左折区間の少なくとも始端及び終端に基づいて、前記カーブ・右左折区間軌跡の候補である候補ラインを算出する候補ライン算出手段と、
前記候補ラインの曲率に基づいて、前記候補ラインの妥当性を判断し、前記候補ラインが妥当であると判断したときに当該候補ラインを前記カーブ・右左折区間軌跡として定める判定手段と、
を備える走行支援装置。
【請求項7】
請求項6に記載の走行支援装置において、
前記判定手段は、下記(1)式により定められるE(X)が最小であると判断したときに前記候補ラインを前記カーブ・右左折区間軌跡として定める走行支援装置。
【数1】
ただし、κ:前記候補ラインの曲率、κ′:前記候補ラインの曲率変化率、s:前記候補ラインの曲線長、X:前記カーブ・右左折区間の始点、終点、及び通過点を含む変数組、a及びb:定数。
【請求項8】
請求項7に記載の走行支援装置において、
前記a及び前記bの入力を受け付ける定数入力手段をさらに備え、
前記判定手段は、前記定数入力手段に入力された前記a及び前記bを用いる走行支援装置。
【請求項9】
請求項1〜8のいずれか一項に記載の走行支援装置において、
前記曲線軌跡算出手段は、前記カーブ・右左折区間軌跡の始端及び終端の曲率が0となるように前記カーブ・右左折区間軌跡を算出し、
前記直進軌跡算出手段は、前記直進軌跡の始端及び終端の曲率が0となるように前記カーブ・右左折区間軌跡を算出する走行支援装置。
【請求項10】
請求項9に記載の走行支援装置において、
前記曲線軌跡算出手段は、前記直進軌跡算出手段が前記直進軌跡を算出した後に前記カーブ・右左折区間軌跡を前記道路の前記始点に近い順又は遠い順に算出し、かつ前記カーブ・右左折区間軌跡の始端及び終端における接線方向を、当該始端又は終端に接続する前記直進区間軌跡又は前記カーブ・右左折区間軌跡の端部における接線方向に一致させる走行支援装置。
【請求項11】
コンピュータが、始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出し、
前記コンピュータが、前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出し、
前記コンピュータが、前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する走行支援方法。
【請求項12】
コンピュータを、道路で走行すべき走行軌跡を算出する走行支援装置として機能させるためのプログラムであって、
前記コンピュータに、
始点と終点をつなぐ道路のうち直進区間の道路情報である直進区間情報を取得し、前記直進区間情報に基づいて、前記直進区間における走行軌跡である直進区間軌跡を算出する機能と、
前記道路のうちカーブ・右左折区間の道路情報であるカーブ・右左折区間情報を取得し、前記カーブ・右左折区間情報に基づいて、前記カーブ・右左折区間における走行軌跡であるカーブ・右左折区間軌跡を、前記直進軌跡とは異なる方法で算出する機能と、
前記カーブ・右左折区間軌跡と、前記直進区間軌跡とを結合することにより、前記道路における走行軌跡を定義する機能と、
を実現させるプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−198281(P2011−198281A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−66736(P2010−66736)
【出願日】平成22年3月23日(2010.3.23)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年度独立行政法人新エネルギー産業技術総合開発機構 エネルギーITS推進事業/協調走行(自動運転)に向けた委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月23日(2010.3.23)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年度独立行政法人新エネルギー産業技術総合開発機構 エネルギーITS推進事業/協調走行(自動運転)に向けた委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]