
走行支援装置、走行支援方法、走行支援プログラム
【課題】利用者の不安を低減させて燃料の補充の必要性を報知することができる走行支援装置、走行支援方法、走行支援プログラムを提供する
【解決手段】内燃機関13とモータ14のうち少なくとも一方を動力源に利用して走行可能な車両11に搭載される走行支援装置21であって、給油施設を記憶する地図情報記憶部29と、車両11の現在地を示す現在地情報を取得すると共に、燃料タンク15内の燃料の残量を示す残量情報を取得し、燃料の残量が報知閾値となった場合に給油の必要性を報知する制御部25とを備え、制御部25は、点灯許可エリアと点灯禁止エリアを設定すると共に、点灯許可エリアにおいて燃料の残量が報知閾値となるように内燃機関が利用されずにモータ14が利用される区間と内燃機関13が少なくとも利用される区間とを設定することにより利用計画を作成し、車両11の現在地情報と利用計画とに基づいてモータ14と内燃機関13とを制御する。
【解決手段】内燃機関13とモータ14のうち少なくとも一方を動力源に利用して走行可能な車両11に搭載される走行支援装置21であって、給油施設を記憶する地図情報記憶部29と、車両11の現在地を示す現在地情報を取得すると共に、燃料タンク15内の燃料の残量を示す残量情報を取得し、燃料の残量が報知閾値となった場合に給油の必要性を報知する制御部25とを備え、制御部25は、点灯許可エリアと点灯禁止エリアを設定すると共に、点灯許可エリアにおいて燃料の残量が報知閾値となるように内燃機関が利用されずにモータ14が利用される区間と内燃機関13が少なくとも利用される区間とを設定することにより利用計画を作成し、車両11の現在地情報と利用計画とに基づいてモータ14と内燃機関13とを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、利用者に燃料の補充の必要性を報知する走行支援装置、走行支援方法、走行支援プログラムに関する。
【背景技術】
【0002】
近年、動力発生源として内燃機関を利用すると共に、車両外から充電される蓄電池をモータの駆動電源として利用したハイブリッド車が、環境に配慮した自動車として注目されている。このようなハイブリッド車では、走行状態に応じて内燃機関を使用した方が効率よく走行できる場合とモータを使用した方が効率よく走行できる場合がある。
【0003】
そこで、特許文献1では、発進時や低速走行時にはモータを使用して走行すると共に、高速走行時には内燃機関を使用して走行するように予め利用計画(初期計画)を作成し、該利用計画に基づいて内燃機関とモータとを切り替えて使用している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−201165号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、一般に車では、燃料が少なくなると給油ランプの点灯などにより利用者に給油の必要性を報知している。そのため、この給油ランプの点灯時にガソリンスタンドなどの給油施設(補充施設)が近くにない場合には、例えモータを使用して給油施設に到達することが可能な場合であったとしても、利用者に不安を与えてしまうという問題があった。
【0006】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、利用者の不安を低減させて燃料の補充の必要性を報知することができる走行支援装置、走行支援方法、走行支援プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記問題点を解決するために、本発明の走行支援装置は、燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両に搭載される走行支援装置であって、前記燃料の補充が可能な補充施設の位置を示す施設位置情報を記憶する記憶手段と、前記車両の現在地を示す現在地情報を取得する現在地情報取得手段と、前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得手段と、前記燃料の残量が報知閾値となった場合に前記燃料の補充の必要性を報知する報知手段と、前記施設位置情報に基づいて前記報知手段による報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定手段と、前記報知許可エリアにおいて前記燃料の残量が前記報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成手段と、前記現在地情報と前記利用計画作成手段が作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御手段とを備えることを要旨とする。
【0008】
この発明によれば、燃料の残量を報知許可エリアにおいて報知閾値とすることができるため、車両が報知許可エリアを走行中に報知手段に燃料の補充の必要性を報知させることができる。したがって、例えば、報知手段が報知禁止エリアにおいて報知してからモータを用いて補充施設まで走行するような場合と比べ、報知手段が報知してから補充施設に到達するまでの距離を短くすることができる。そのため、利用者の不安を低減させて燃料の補充の必要性を報知することができる。
【0009】
本発明の走行支援装置において、目的地の位置を示す目的地情報を取得する目的地情報取得手段と、前記現在地から前記目的地までの経路を設定する経路設定手段と、前記経路に基づいて前記第1区間と前記第2区間とを前記経路上に設定することにより前記動力源を利用する上での初期計画を作成する初期計画作成手段と、前記初期計画に基づいて前記報知手段が前記経路上において前記燃料の補充の必要性を報知する報知位置を推定する推定手段とをさらに備え、前記利用計画作成手段は、前記初期計画に基づいて推定された前記報知位置が前記報知禁止エリアに位置する場合には、前記報知位置が前記報知許可エリアに位置するように前記初期計画を補正して前記利用計画を作成することを要旨とする。
【0010】
この発明によれば、現在地から目的地までの経路に基づいて初期計画を作成することができるため、効率よく車両を走行させることができる。また、初期計画に基づいて推定された報知位置が報知禁止エリアに位置する場合には、初期計画に基づいて車両が走行すると報知禁止エリアにおいて給油の必要性が報知されてしまう。しかし、その初期計画を補正して報知許可エリアにおいて報知閾値となるように利用計画を作成することができるため、利用者の不安を低減させて燃料の補充の必要性を報知することができる。
【0011】
本発明の走行支援装置において、前記報知エリア設定手段は、前記現在地情報と前記施設位置情報とに基づき、前記経路設定手段が設定した前記経路において、前記補充施設の位置よりも前記現在地側に前記報知許可エリアを設定することを要旨とする。
【0012】
この発明によれば、目的地までの経路において報知許可エリアを補充施設の位置よりも現在地側に設定することにより、報知手段が燃料の補充の必要性を報知してから補充施設に到達するまでの経路上の距離を短くすることができる。
【0013】
本発明の走行支援装置において、前記経路沿いに複数の補充施設が存在する場合には、前記利用計画作成手段は、前記燃料の残量と前記モータに電力を供給する蓄電池に蓄電された電力によって到達できる範囲内の前記補充施設であって、且つ前記目的地に近い前記補充施設に対応する前記報知許可エリアに前記報知位置が位置するように前記利用計画を作成することを要旨とする。
【0014】
この発明によれば、燃料タンクにより多くの燃料を残存させた状態で目的地に到達することができるため、目的地到達後、更に別の地点へ移動したいという利用者の要望にも対応することが可能となる。
【0015】
また、上記問題点を解決するために、本発明の走行支援方法は、燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両の現在地を示す現在地情報を取得する現在地情報取得段階と、前記燃料タンク内の燃料の残量を示す残量情報を取得する残量情報取得段階と、記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定段階と、前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成段階と、前記現在地情報と前記利用計画作成段階において作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御段階と、前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知段階とを備えることを要旨とする。
【0016】
この発明によれば、上記走行支援装置に係る発明と同様の作用効果を奏し得る。
また、上記問題点を解決するために、本発明の走行支援プログラムは、燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両における制御装置が前記車両の走行を支援するために実行する走行支援プログラムであって、前記制御装置に、前記車両の現在地を示す現在地情報を取得する現在地情報取得ステップと、前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得ステップと、記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定ステップと、前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成ステップと、前記現在地情報と前記利用計画作成ステップにおいて作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御ステップと、前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知ステップとを実行させることを要旨とする。
【0017】
この発明によれば、上記走行支援装置に係る発明と同様の作用効果を奏し得る。
【図面の簡単な説明】
【0018】
【図1】車両のブロック図。
【図2】現在地から目的地までの初期計画を示す模式図。
【図3】利用計画作成ルーチンを示すフローチャート。
【図4】利用計画作成ルーチンを示すフローチャート。
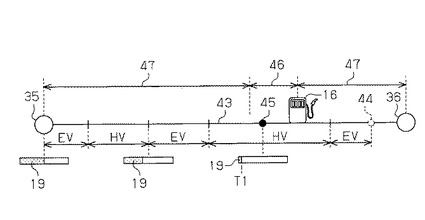
【図5】給油ランプ点灯地点が点灯許可エリアに位置する場合の初期計画を示す模式図。
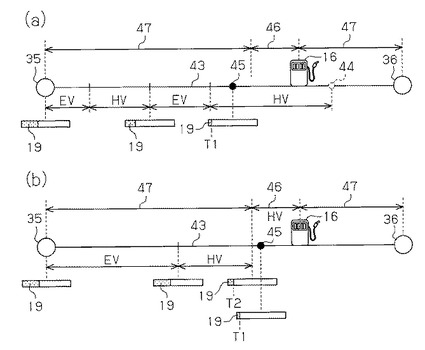
【図6】(a)は点灯許可エリアよりも現在地側に給油ランプ点灯地点が位置する場合の初期計画を示す模式図、(b)は補正後の利用計画を示す模式図。
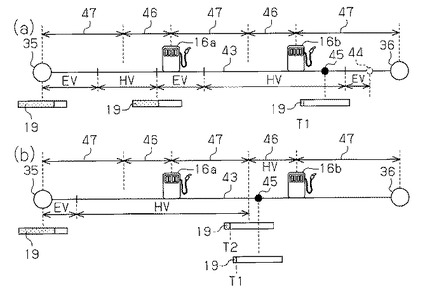
【図7】(a)は到達可能位置までに複数の給油施設がある場合の初期計画を示す模式図、(b)は補正後の利用計画を示す模式図。
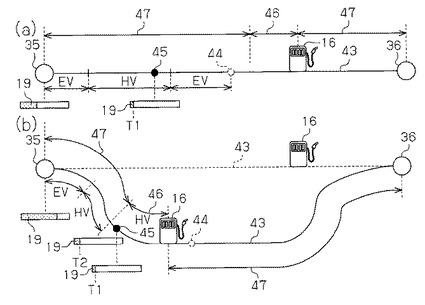
【図8】(a)は到達可能位置までに給油施設がない場合の初期計画を示す模式図、(b)は補正後の利用計画を示す模式図。
【発明を実施するための形態】
【0019】
以下、本発明を具体化した一実施形態を図1〜図8に従って説明する。
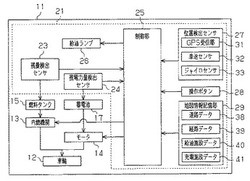
図1に示すように、車両11には、走行時に路面に接触する複数(本実施形態では4つ)の車輪12が回転可能に設けられていると共に、車輪12に駆動力を伝達する複数種類の動力源として内燃機関13とモータ14とが搭載されている。
【0020】
内燃機関13には、ガソリンなどの燃料を貯留可能な燃料タンク15が接続されている。さらに、車両11には、外部から燃料タンク15に燃料を供給するための供給口(図示略)が設けられている。そのため、ガソリンスタンドなどの給油施設(補充施設)16(図5参照)において、給油口から燃料タンク15への給油(燃料の補充)が可能になっている。
【0021】
また、モータ14には、該モータ14に電力を供給する蓄電池17が接続されている。さらに、車両11には、蓄電池17を外部から充電するための充電コネクタ(図示略)が設けられている。すなわち、蓄電池17は、コンセントや充電スタンドなどの充電設備が設けられた充電施設において、ケーブルなどの充電機器と充電コネクタとを接続することにより、商用電源などの外部電源から充電が可能になっている。
【0022】
なお、内燃機関13は、燃料タンク15から供給された燃料を燃焼させることにより動力を発生させる。一方、モータ14は、蓄電池17に蓄電された電力を回転エネルギーに変換することにより動力を発生させる。そして、車両11は、内燃機関13とモータ14とのうち、少なくとも一方を動力源として利用して車輪12を回転させることにより走行可能になっている。
【0023】
さらに、車両11には、燃料タンク15に貯留された燃料の残量19(図2参照)、蓄電池17の残電力量20(図2参照)、及び走行条件に基づいて、内燃機関13とモータ14の利用状態を制御する走行支援装置21が搭載されている。なお、走行条件とは、道路の傾斜や混雑状況、道幅や制限速度などが含まれ、車両11が道路を走行する際に燃費に影響を与える条件である。
【0024】
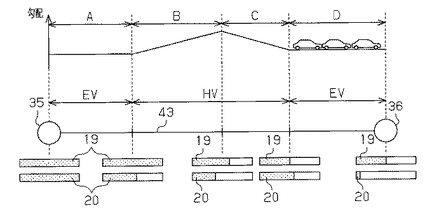
なお、図2では、下方に示す横長の四角形にて表されるバーにより、燃料タンク15に貯留可能な燃料の量(図中上側)と蓄電池17に蓄電可能な電力量(図中下側)とを模式的に表している。すなわち、それぞれ網掛け部分が燃料タンク15に貯留されている燃料の残量19と蓄電池17に蓄電されている残電力量20とを表している。さらに、図中上側のバーにおける白抜き部分が燃料タンク15に補充可能な燃料の量を表し、網掛け部分(残量19)と白抜き部分の合計(バー全体)が燃料タンク15の容量を表している。また、同様に、図中下側のバーにおける白抜き部分が蓄電池17に充電可能な電力量を表し、網掛け部分(残電力量20)と白抜き部分の合計(バー全体)が、蓄電池17の容量を表している。
【0025】
さて、図1に示すように、走行支援装置21は、燃料タンク15に残存する燃料の残量19を検出する残量検出センサ23と、蓄電池17に蓄電された残電力量20を検出する残電力量検出センサ24とを備えている。そして、残量検出センサ23及び残電力量検出センサ24には、制御手段及び制御装置としての制御部25が接続されていると共に、残量検出センサ23が検出した燃料の残量19を示す残量情報と残電力量検出センサ24が検出した残電力量20を示す残電力量情報とが制御部25により取得可能となっている。したがって、制御部25は、残量情報取得手段としても機能している。
【0026】
また、制御部25には、給油ランプ26、位置検出センサ27、操作ボタン28、記憶手段としての地図情報記憶部29が接続されている。そして、制御部25は、取得した残量情報に基づいて燃料タンク15内の燃料の残量19がメモリ(図示略)に記憶された報知閾値T1(図5参照)となったと判断した場合に、給油ランプ26を点灯制御することにより、利用者に給油の必要性を報知するようになっている。したがって、制御部25は、報知手段としても機能している。
【0027】
位置検出センサ27は、GPS受信部31が、GPS(Global Positioning System)衛星から受信した、緯度・経度等の座標を示す位置検出信号を入力して、電波航法により車両11の絶対位置を算出する。また、車速センサ32及びジャイロセンサ33が車速パルス及び角速度を検出し、この車速パルス及び角速度を用いる自律航法により、基準位置からの相対位置を算出する。そして、制御部25は、電波航法で算出した絶対位置と自律航法で算出した基準位置からの相対位置とを組み合わせて車両11の現在地35(図2参照)を特定し、特定された車両11の現在地35を示す位置情報を現在地情報として取得する。したがって、制御部25は、現在地情報取得手段としても機能している。
【0028】
さらに、操作ボタン28は、利用者が操作することにより、目的地36(図2参照)の設定が可能となっている。すなわち、制御部25は、操作ボタン28の操作に基づいて設定された目的地36の位置を示す目的地情報を取得する目的地情報取得手段としても機能している。
【0029】
そして、地図情報記憶部29には、道路の形状を表す道路データ38と、目的地36までの経路を探索するための経路データ39とが格納されている。さらに、地図情報記憶部29には、給油施設16の位置を示す施設位置情報としての給油施設データ40と、充電施設の位置を示す充電施設データ41とが格納されている。
【0030】
なお、道路データ38は、道路の形状を表すデータであって、ノード座標、形状補間点の座標、幅員、勾配、路面状態、混雑のしやすさ等が記憶されている。そして、本実施形態では、この道路データ38として記憶された各データが道路の走行条件を表すようになっている。また、経路データ39は、全国を区画したメッシュ内の道路に関するデータであって、各メッシュの識別子であるメッシュIDと、交差点、インターチェンジ、道路の端点等を示す要素であるノードのノードデータと、各ノードを接続する要素であるリンクのリンクデータとを有している。
【0031】
そして、図2に示すように、制御部25は、目的地36が設定されると、現在地情報、目的地情報、及び経路データ39に基づいて現在地35から目的地36までの経路43を設定する。したがって、制御部25は、経路設定手段としても機能している。なお、設定された経路43は、図示しないディスプレイに地図と共に表示されることにより、利用者を目的地36まで案内するようになっている。
【0032】
また、内燃機関13とモータ14とを動力源として利用する車両11では、走行条件に応じて内燃機関13とモータ14との利用状態を変更することにより、燃費を向上させることができる。具体的には、例えば渋滞区間では、内燃機関13を利用するよりもモータ14を利用する方が有利に走行することができる。また、上り坂区間では、モータ14を利用するよりも内燃機関13を利用する方が有利に走行することができる。
【0033】
そして、こうした燃費向上などを図るために、制御部25は、経路43を走行する際の動力源を利用する上での初期計画を道路データ38(走行条件)に基づいて作成する。したがって、制御部25は、初期計画作成手段としても機能している。
【0034】
ここで、図2では、内燃機関13が利用されずにモータ14のみが利用される状態をEV状態(第1利用状態)とすると共に、内燃機関13が少なくとも利用される状態をHV状態(第2利用状態)として表している。すなわち、HV状態とは、内燃機関13のみを利用する状態、もしくは内燃機関13とモータ14とを併用して利用する状態である。ただし、図面ではEV状態を単に「EV」と表すと共に、HV状態を単に「HV」として表している。
【0035】
さらに、図2は、上のグラフにおいて、道路データ38として記憶されている経路43の情報のうち、道路の勾配と混雑状態とを模式的に表している。すなわち、現在地35から目的地36までの経路43に対応する道路データ38としては、区間Aは、ほぼ平坦で閑散とした道路、区間Bは上り坂、区間Cは下り坂、区間Dは、平坦だが混雑する(渋滞しやすい)道路という情報(走行条件)が記憶されているものとする。
【0036】
そのため、制御部25は、道路データ38に基づいて区間AをEV状態にて走行する区間(第1区間)として設定すると共に、区間B及び区間CをHV状態にて走行する区間(第2区間)、区間DをEV状態にて走行する区間(第1区間)として設定する初期計画を作成する。
【0037】
したがって、実際に初期計画に基づいて車両11が走行すると、現在地35(走行開始時)において燃料タンク15に一杯に補充されていた燃料の残量19は、区間Aを走行する間は維持される。一方、蓄電池17に満充電されていた残電力量20は、区間Aを走行する間に減少する。
【0038】
さらに、区間Bを走行する場合には、内燃機関13とモータ14とが利用されるため、燃料の残量19と残電力量20が共に減少するのに対し、区間Cを走行する場合には、車輪12の回転(回生ブレーキ)によって蓄電池17が充電され、残電力量20が増加する。そして、区間Dを走行する場合には、燃料タンク15内の残量19が維持されるのに対し、残電力量20は減少する。
【0039】
なお、この初期計画は、特に目的地36と充電施設の位置とが一致している場合、もしくは目的地36の周辺に充電施設がある場合には、目的地36に到達した段階で蓄電池17に蓄電された電力を使い切るように作成するのが好ましい。
【0040】
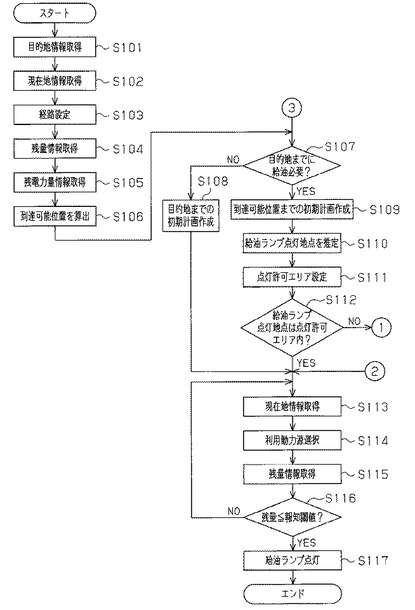
続いて、図3及び図4に示す利用計画作成ルーチンをフローチャートに基づいて説明する。なお、利用計画作成ルーチンは、利用者によって操作ボタン28が操作されて目的地36が設定された場合に実行される。
【0041】
さて、ステップS101において、制御部25は、設定された目的地36の位置情報を目的地情報として取得すると共に、ステップS102において、位置検出センサ27の検出結果に基づいて、車両11の現在地を示す現在地情報を取得する(現在地情報取得段階、現在地情報取得ステップ)。そして、ステップS103において、制御部25は、取得した目的地情報と現在地情報と経路データ39とに基づいて、現在地35から目的地36までの経路43を設定する。
【0042】
さらに、ステップS104において、制御部25は、残量検出センサ23が検出した燃料の残量19を示す残量情報を取得する(残量情報取得段階、残量情報取得ステップ)と共に、ステップS105において、残電力量検出センサ24が検出した残電力量20を示す残電力量情報を取得する。そして、ステップS106において、制御部25は、残量情報、残電力量情報、現在地35から目的地36までの経路43、道路データ38に基づいて到達可能位置44(図5参照)を算出する。すなわち、到達可能位置44とは、燃料の残量19と蓄電池17の残電力量20が共にゼロとなると推定される位置である。
【0043】
そして、ステップS107において、制御部25は、目的地36と到達可能位置44とを比較することにより、目的地36まで走行する間に給油が必要となるか否かを判断する。すなわち、制御部25は、到達可能位置44よりも目的地36が遠い場合には給油が必要と判断し、到達可能位置44よりも目的地36が近い場合には給油が不要と判断する。
【0044】
さて、給油が不要である(ステップS107:NO)と判断した場合には、ステップS108において、制御部25は、図2に示すように、走行条件に応じて目的地36までの初期計画を作成する。ただし、給油が不要であると判断した場合の初期計画は、該初期計画に基づいて車両11が現在地35から目的地36まで走行した場合に、目的地36において燃料タンク15に報知閾値T1以上の燃料が残るように作成されるものとする。
【0045】
また、ステップS107において、給油が必要である(ステップS107:YES)と判断した場合には、ステップS109において、制御部25は、図5に示すように、到達可能位置44までの初期計画を作成する。
【0046】
すなわち、制御部25は、走行条件に応じて到達可能位置44までの初期計画を作成する。具体的には、制御部25は、経路43における現在地35から到達可能位置44までの区間を、道路データ38に基づいてEV状態にて走行する区間とHV状態にて走行する区間に区分けする。
【0047】
さらに、ステップS110において、制御部25は、残量19が報知閾値T1となる報知位置としての給油ランプ点灯地点45(図5参照)を推定する。したがって、制御部25は、推定手段としても機能している。
【0048】
具体的には、制御部25は、まず初期計画と道路データ38とに基づいて、経路43を構成するリンク列ごとに該リンク列を走行する際に使用する電力量と燃料の量をそれぞれ算出する。すなわち、制御部25は、EV状態にて走行する区間と対応するリンク列について、使用する電力量を算出する。さらに、制御部25は、HV状態にて走行する区間と対応するリンク列について、使用する電力量と燃料の量をそれぞれ算出する。そして、制御部25は、算出した電力量及び燃料の量と、ステップS104及びステップS105にて取得した燃料の残量19と残電力量20とに基づいて給油ランプ点灯地点45を推定する。
【0049】
そして、ステップS111において、制御部25は、報知許可エリアとしての点灯許可エリア46(図5参照)を設定すると共に、経路43において、点灯許可エリア46以外のエリアを、報知禁止エリアとしての点灯禁止エリア47(図5参照)と設定する(報知エリア設定段階、報知エリア設定ステップ)。また、この点で制御部25は、報知エリア設定手段としても機能している。
【0050】
この点灯許可エリア46とは、各給油施設16にそれぞれ対応付けて設定されるエリアであって、各給油施設16よりも現在地35側に経路43に沿って設定されるエリアである。そのため、点灯許可エリア46は、同じ給油施設16に対して設定される場合であっても、該給油施設16に対する現在地35の方角や給油施設16までの経路43によって変化する。具体的には、給油施設16から現在地35側に所定距離だけ離れた地点から給油施設16までの経路43上の区間が点灯許可エリア46として設定される。なお、この所定距離としては、給油ランプ26が点灯した状態で給油施設16まで走行する際に利用者が不安を感じない程度の距離(例えば給油施設16から1〜2km)が設定される。また、所定距離は、燃料の残量19が報知閾値T1となった時点から内燃機関13のみを用いて走行することが可能な距離以下に設定されることが好ましい。
【0051】
続いて、ステップS112において、制御部25は、給油ランプ点灯地点45が点灯許可エリア46に位置しているか否かを判断する。そして、給油ランプ点灯地点45が点灯許可エリア46に位置している(ステップS112:YES、図5参照)と判断した場合には、制御部25は、続くステップS113〜S117において、作成した初期計画と、走行する車両11の現在地情報に応じて動力源の利用制御を実行する。
【0052】
すなわち、まずステップS113では、制御部25は、ステップS102と同様に現在地情報を取得する。ただし、車両11の走行に伴って現在地35の位置は変化する。そして、ステップS114において、制御部25は、ステップS113において取得した現在地情報と初期計画とに基づいて利用する動力源を選択する。すなわち、制御部25は、車両11がEV状態にて走行する区間として計画された区間内に位置にする場合には、モータ14のみを動力源として選択するのに対し、HV状態にて走行する区間として計画された区間内に位置する場合には、動力源として少なくとも内燃機関13を選択する。
【0053】
さらに、ステップS115において、制御部25は、ステップS104と同様に残量情報を取得する。そして、ステップS116において、制御部25は、ステップS115において取得した残量情報に基づいて燃料タンク15内の燃料の残量19が報知閾値T1以下となったか否かを判断する。
【0054】
すなわち、燃料の残量19が報知閾値T1よりも多い(ステップS116:NO)と判断した場合には、制御部25は、給油の必要はないと判断してステップS113へ移行する。一方、燃料の残量19が報知閾値T1以下である(ステップS116:YES)と判断した場合には、制御部25は、給油の必要性があると判断し、ステップS117において給油ランプ26を点灯させることにより、給油の必要性を利用者に報知する(報知段階、報知ステップ)。
【0055】
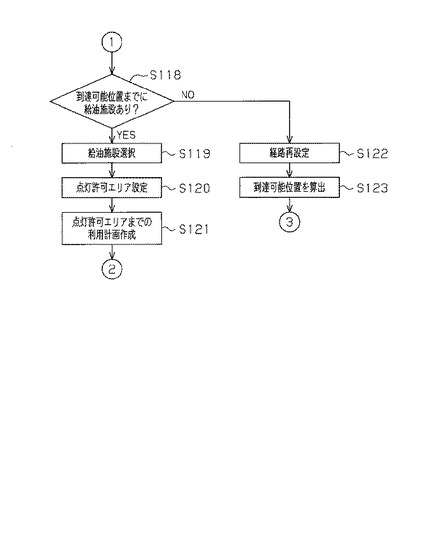
また、ステップS112において、給油ランプ点灯地点45が点灯禁止エリア47(すなわち、点灯許可エリア46外)に位置する(ステップS112:NO)と判断した場合には、図4に示すように、ステップS118において、制御部25は、到達可能位置44までに給油施設16があるか否かを判断する。なお、このとき選択される給油施設16の有無は、経路43と、該経路43から所定の範囲(例えば両側100m)において判断される。
【0056】
そして、現在地35と到達可能位置44との間に給油施設16がある(ステップS118:YES、図6,図7参照)と判断した場合には、ステップS119において、制御部25は、現在地35と到達可能位置44との間に位置する給油施設16を、本車両11に給油を行う給油施設16として選択する。なお、現在地35と到達可能位置44との間に複数の給油施設16がある場合には、制御部25は、目的地36に最も近い給油施設16を選択する。つまり、複数の給油施設16がある場合には、燃料の残量19と残電力量20とによって到達できる範囲の給油施設16であって、且つ目的地36に近い給油施設16を選択する。
【0057】
さらに、ステップS120において、制御部25は、選択した給油施設16に対応する点灯許可エリア46を設定すると共に、経路43における点灯許可エリア46以外の場所を点灯禁止エリア47に設定する(報知エリア設定段階、報知エリア設定ステップ)。
【0058】
そして、続くステップS121において、制御部25は、点灯許可エリア46内に給油ランプ点灯地点45が位置するように、ステップS109にて作成した初期計画を補正して点灯許可エリア46までの利用計画を作成する(利用計画作成段階、利用計画作成ステップ)。したがって、制御部25は、利用計画作成手段としても機能している。ただし、初期計画を補正して利用計画を作成する具体的な方法は、フローチャートの説明の後に図5〜図8を用いて説明する。
【0059】
その後、制御部25は、ステップS113〜S117を実行する。すなわち、制御部25は、ステップS113において現在地情報を取得した後、ステップS114において、ステップS121にて作成した利用計画とステップS113にて取得した現在地情報とに基づいて利用する動力源を選択し、内燃機関13とモータ14とを制御する(制御段階、制御ステップ)。
【0060】
また、ステップS118において、現在地35と到達可能位置44との間に給油施設16がない(ステップS118:NO、図8参照)と判断した場合には、ステップS122において、制御部25は、現在地35と目的地36との間で経路43の再設定を行う。さらに、ステップS123において、制御部25は、新たに設定した経路43と、ステップS104,S105において取得した残量情報及び残電力量情報に基づいて到達可能位置44を算出する。
【0061】
その後、ステップS107に戻り、給油施設16まで到達可能な経路43が見つかるまでステップS107〜S123を繰り返し実行する。すなわち、制御部25は、目的地36までに給油が必要であるか否か、また現在地35と新たに算出した到達可能位置44との間に給油施設16があるか否かを判断し、利用計画を作成すると共に動力源の利用制御を実行する。
【0062】
次に、図5〜図8に基づいて、到達可能位置44と目的地36及び給油施設16の位置関係に応じた初期計画及び利用計画の作成について、目的地36まで走行するのに給油が必要な場合を例に説明する。
【0063】
さて、図5には、現在地35から目的地36までの経路43と、燃料の残量19及び残電力量20(図5では図示略)に基づいて算出された到達可能位置44とを示している。なお、この場合は、到達可能位置44よりも目的地36が遠いため、目的地36まで走行する間に給油が必要となる。
【0064】
そこで、制御部25は、まず到達可能位置44までの初期計画を作成し、該初期計画と現在地35(すなわち、出発地)における燃料の残量19に基づいて、残量19が報知閾値T1となる給油ランプ点灯地点45を推定する。より具体的には、経路43と初期計画と現在地35における燃料の残量19とに基づいて、経路43を走行した場合の経路43上の各地点における燃料の残量19を推定する。そして、推定した燃料の残量19が報知閾値T1以下となる地点を給油ランプ点灯地点45として推定する。さらに、制御部25は、経路43と給油施設データ40とに基づいて点灯許可エリア46と点灯禁止エリア47を設定する。
【0065】
すると、図5に示す初期計画では、給油ランプ点灯地点45が点灯許可エリア46に位置する。そのため、この場合には、現在地35から給油施設16まで走行する間は、初期計画に基づいて動力源の利用制御が実行される。そして、給油施設16において給油がされた後は、制御部25は、給油施設16を現在地35として目的地36までの初期計画を作成する。
【0066】
次に、図5と別の例として、図6に示す初期計画及び利用計画の作成について説明する。
なお、以下に示す図6〜図8のパターンにおいても、図5に示すパターンと同様に経路43、到達可能位置44、給油ランプ点灯地点45、点灯許可エリア46、点灯禁止エリア47が設定もしくは算出、推定されているものとする。
【0067】
すなわち、図6(a)に示す初期計画では、到達可能位置44と現在地35との間に給油施設16があると共に、給油ランプ点灯地点45が点灯許可エリア46よりも現在地35側の点灯禁止エリア47に位置している。
【0068】
さて、このような場合には、現在地35から点灯許可エリア46までの範囲(点灯禁止エリア47)において、EV状態にて走行する区間を増やすことにより、給油ランプ点灯地点45を目的地36側にずらすことができる。具体的には、図6(b)に示すように、制御部25は、まず点灯許可エリア46をHV状態にて走行する区間として設定する。さらに、制御部25は、点灯許可エリア46の開始位置に車両11が到達する際における燃料の残量19が報知閾値T1よりも多い補正閾値T2となるように、初期計画におけるHV状態にて走行する区間の一部又は全部を、EV状態にて走行する区間に置換することにより初期計画を補正して、利用計画を作成する。
【0069】
なお、補正閾値T2は、報知閾値T1との差分の燃料で走行可能な距離が点灯許可エリア46よりも短くなるように設定されている。さらに、点灯許可エリア46の開始位置に車両11が到達した以降はHV状態にて走行するため、点灯許可エリア46の開始位置における燃料の残量19が補正閾値T2以下となっていれば、点灯許可エリア46内での燃料の残量19が報知閾値T1となる。したがって、図6(b)に示す利用計画によって給油ランプ点灯地点45を点灯許可エリア46内に変更することができる。すなわち、初期計画を補正した利用計画に基づいて車両11を走行させることにより、点灯許可エリア46内において給油ランプ26を点灯させることができる。
【0070】
次に、図7に示す初期計画及び利用計画の作成について説明する。
図7(a)では、現在地35と到達可能位置44との間に複数の給油施設16(16a,16b)が位置している。そのため、制御部25は、給油施設16のうち、目的地36に近い給油施設16bを選択する。さらに、初期計画における給油ランプ点灯地点45は、当該選択した給油施設16bに対応する点灯許可エリア46よりも目的地36側の点灯禁止エリア47に位置している。
【0071】
そして、このような場合には、現在地35から点灯許可エリア46までの範囲において、HV状態にて走行する区間を増やすことにより、給油ランプ点灯地点45を現在地35側にずらすことができる。具体的には、この場合も図6(b)に示す場合と同様に、制御部25は、点灯許可エリア46をHV状態にて走行する区間として設定すると共に、点灯許可エリア46の開始位置に車両11が到達する際における燃料の残量19が、補正閾値T2となるように初期計画を補正する(図7(b)参照)。なお、この場合には、制御部25は、点灯許可エリア46の開始位置に車両11が到達する際における燃料の残量が報知閾値T1よりも多い補正閾値T2となるように、初期計画におけるEV状態にて走行する区間の一部又は全部を、HV状態にて走行する区間に置換することにより、初期計画を補正して利用計画を作成する。すると、図7(b)に示す利用計画に基づいて車両11が走行することにより、給油ランプ点灯地点45を点灯許可エリア46内に変更し、点灯許可エリア46において給油ランプ26を点灯させることができる。
【0072】
次に、図8に示す初期計画及び利用計画の作成について説明する。
図8(a)に示すように、現在地35と到達可能位置44との間に給油施設16がない場合には、図8(b)に示すように、現在地35と目的地36との間で経路43を再設定すると共に、残量情報及び残電力量情報と、新たに設定された経路43とに基づいて到達可能位置44が算出される。
【0073】
そして、新たに設定した経路43において到達可能な給油施設16が見つかると、制御部25は、新たに設定した経路43をディスプレイ(図示略)に表示する。さらに、制御部25は、給油施設16に対応する点灯許可エリア46及び点灯禁止エリア47を設定し、点灯許可エリア46において燃料の残量が報知閾値T1となるように点灯許可エリア46までの初期計画、又は利用計画を作成する。
【0074】
上記実施形態によれば、以下のような効果を得ることができる。
(1)燃料の残量19を点灯許可エリア46において報知閾値T1とすることができるため、車両11が点灯許可エリア46を走行中に給油ランプ26を点灯させて給油の必要性を報知させることができる。したがって、例えば、給油ランプ26が点灯禁止エリア47において点灯してからモータ14を用いて給油施設16まで走行するような場合と比べ、給油ランプ26が点灯してから給油施設16に到達するまでの距離を短くすることができる。そのため、利用者の不安を低減させて給油の必要性を報知することができる。
【0075】
(2)現在地35から目的地36までの経路43に基づいて初期計画を作成することができるため、効率よく車両を走行させることができる。また、初期計画に基づいて推定された給油ランプ点灯地点45が点灯禁止エリア47に位置する場合には、初期計画に基づいて車両11が走行すると点灯禁止エリア47において給油ランプ26が点灯してしまう。しかし、その初期計画を補正して点灯許可エリア46において報知閾値T1となるように利用計画を作成することができるため、利用者の不安を低減させて燃料の補充の必要性を報知することができる。
【0076】
(3)目的地36までの経路43において点灯許可エリア46を給油施設16の位置よりも現在地35側に設定することにより、給油ランプ26が点灯してから給油施設16に到達するまでの経路43上の距離を短くすることができる。
【0077】
(4)経路43に複数の給油施設16がある場合には、目的地36に近い給油施設16を選択することにより、燃料タンク15により多くの燃料を残存させた状態で目的地36に到達することができる。そのため、目的地36に到達後、更に別の地点へ移動したいという利用者の要望にも対応することが可能となる。
【0078】
なお、上記実施形態は以下のように変更してもよい。
・上記実施形態において、走行支援装置21は、ディスプレイに地図と経路43とを表示して車両11を目的地36まで案内するナビゲーション装置とし、ディスプレイを介して給油の必要性を報知するようにしてもよい。また、スピーカを用いて音声や警告音により利用者に給油の必要性の報知するようにしてもよい。
【0079】
・上記実施形態において、給油ランプ26は、燃料の残量19が報知閾値T1未満となったときに点灯するようにしてもよい。
・上記実施形態において、現在地35の位置情報も目的地36の位置情報と同様に操作ボタン28の操作によって利用者が入力するようにしてもよい。また、車速センサ32及びジャイロセンサ33を設けず、制御部25は、GPS受信部31が受信した情報を現在地情報として取得するようにしてもよい。
【0080】
・上記実施形態において、点灯許可エリア46を給油施設16の所定範囲(例えば給油施設16から1〜2kmの範囲)内と設定してもよい。すなわち、現在地情報を用いずに点灯許可エリア46と点灯禁止エリア47とを設定してもよい。そして、この場合には、経路43において、点灯許可エリア46に到達する際に補正閾値T2となるように利用計画が作成される。
【0081】
・上記実施形態において、給油対象となる給油施設16は、走行車線側に位置する給油施設16のみとしてもよく、また、中央分離帯が無い道路においてのみ反対車線側の給油施設16を含めるようにしてもよい。そして、現在地35から到達可能位置44までの間に複数の給油施設16がある場合には、最も現在地35側に位置する給油施設16や、推定された給油ランプ点灯地点45に最も近い給油施設16を選択するようにしてもよい。さらに、給油施設16は、利用者に選択させるようにしてもよい。
【0082】
・上記実施形態において、初期計画の補正が必要であると判断した場合には、制御部25は、点灯許可エリア46内の任意の地点を選択し、該地点に到達する際に燃料の残量19が報知閾値T1となるように初期計画を補正して、利用計画を作成してもよい。なお、この場合は、補正閾値T2を記憶しておかなくてもよい。
【0083】
・上記実施形態において、目的地36及び経路43の設定と、初期計画の作成と、給油ランプ点灯地点45の推定と、を行わないようにしてもよい。すなわち、例えば、制御部25は、燃料の残量19が補正閾値T2になるまで現在地情報と道路データ38とに基づいて車両11を走行させる。そして、燃料の残量19が補正閾値T2となった地点以降は、当該地点から点灯許可エリア46に到達するまでの区間をEV状態にて走行する区間として設定すると共に、点灯許可エリア46をHV状態にて走行する区間として設定することにより、利用計画を作成してもよい。
【0084】
すなわち、このような利用計画を設定した場合には、点灯禁止エリア47において燃料の残量19が補正閾値T2となる。しかし、制御部25は、残量19が補正閾値T2となったと判断すると、点灯許可エリア46に到達するまではモータ14のみで車両11を走行させるため、給油ランプ26の点灯が抑制される。そして、点灯許可エリア46まで到達すると、内燃機関13が利用されるため、点灯許可エリア46内において給油ランプ26を点灯させることができる。
【0085】
・上記実施形態において、燃料の残量19及び残電力量20に基づいて現在地35から到達可能な範囲に存在する充電施設に到達する際に残電力量20を使い切るように利用計画を作成するようにしてもよい。ただし、このときの利用計画についても、点灯許可エリア46において残量19が報知閾値T1となるように作成される。
【0086】
・上記実施形態において、図6(a)に示すように、到達可能位置44と給油ランプ点灯地点45との間に給油施設16がある場合には、制御部25は、燃料の残量19が補正閾値T2になるまで初期計画に基づいて車両11を走行させるようにしてもよい。そして、補正閾値T2となった地点以降は、当該地点から点灯許可エリア46の開始点に到達するまでの区間をEV状態にて走行する区間として設定すると共に、点灯許可エリア46をHV状態にて走行する区間として設定する。
【0087】
このように、道路データ38に基づいて先に作成した初期計画に従って車両11を走行させると共に、補正閾値T2となった後の初期計画を補正して利用計画を作成することにより、燃費を向上させることができると共に、点灯許可エリア46内において給油ランプ26を点灯させることができる。
【0088】
・上記実施形態において、内燃機関13は、燃料を燃焼させることにより車輪12を回転させる動力を発生させることができればよく、燃焼させる燃料も、ガソリン、軽油、灯油、バイオ燃料、気体燃料(液化石油ガス、天然ガスなど)など任意に選択することができる。
【0089】
・上記実施形態において、モータ14に電力を供給可能な蓄電池17の代わりに燃料電池(発電装置)を設けるようにしてもよい。この場合には、残存する原料(例えば水素)の量に応じて到達可能位置44を算出するようにしてもよい。
【符号の説明】
【0090】
11…車両、13…内燃機関、14…モータ、15…燃料タンク、16…給油施設(補充施設)、17…蓄電池、19…残量、21…走行支援装置、25…制御部(制御手段、現在地情報取得手段、残量情報取得手段、報知手段、報知エリア設定手段、利用計画作成手段、目的地情報取得手段、経路設定手段、初期計画作成手段、推定手段、制御装置)、29…地図情報記憶部(記憶手段)、35…現在地、36…目的地、40…給油施設データ(施設位置情報)、43…経路、45…給油ランプ点灯地点(報知位置)、46…点灯許可エリア(報知許可エリア)、47…点灯禁止エリア(報知禁止エリア)、T1…報知閾値。
【技術分野】
【0001】
本発明は、利用者に燃料の補充の必要性を報知する走行支援装置、走行支援方法、走行支援プログラムに関する。
【背景技術】
【0002】
近年、動力発生源として内燃機関を利用すると共に、車両外から充電される蓄電池をモータの駆動電源として利用したハイブリッド車が、環境に配慮した自動車として注目されている。このようなハイブリッド車では、走行状態に応じて内燃機関を使用した方が効率よく走行できる場合とモータを使用した方が効率よく走行できる場合がある。
【0003】
そこで、特許文献1では、発進時や低速走行時にはモータを使用して走行すると共に、高速走行時には内燃機関を使用して走行するように予め利用計画(初期計画)を作成し、該利用計画に基づいて内燃機関とモータとを切り替えて使用している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−201165号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、一般に車では、燃料が少なくなると給油ランプの点灯などにより利用者に給油の必要性を報知している。そのため、この給油ランプの点灯時にガソリンスタンドなどの給油施設(補充施設)が近くにない場合には、例えモータを使用して給油施設に到達することが可能な場合であったとしても、利用者に不安を与えてしまうという問題があった。
【0006】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、利用者の不安を低減させて燃料の補充の必要性を報知することができる走行支援装置、走行支援方法、走行支援プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記問題点を解決するために、本発明の走行支援装置は、燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両に搭載される走行支援装置であって、前記燃料の補充が可能な補充施設の位置を示す施設位置情報を記憶する記憶手段と、前記車両の現在地を示す現在地情報を取得する現在地情報取得手段と、前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得手段と、前記燃料の残量が報知閾値となった場合に前記燃料の補充の必要性を報知する報知手段と、前記施設位置情報に基づいて前記報知手段による報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定手段と、前記報知許可エリアにおいて前記燃料の残量が前記報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成手段と、前記現在地情報と前記利用計画作成手段が作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御手段とを備えることを要旨とする。
【0008】
この発明によれば、燃料の残量を報知許可エリアにおいて報知閾値とすることができるため、車両が報知許可エリアを走行中に報知手段に燃料の補充の必要性を報知させることができる。したがって、例えば、報知手段が報知禁止エリアにおいて報知してからモータを用いて補充施設まで走行するような場合と比べ、報知手段が報知してから補充施設に到達するまでの距離を短くすることができる。そのため、利用者の不安を低減させて燃料の補充の必要性を報知することができる。
【0009】
本発明の走行支援装置において、目的地の位置を示す目的地情報を取得する目的地情報取得手段と、前記現在地から前記目的地までの経路を設定する経路設定手段と、前記経路に基づいて前記第1区間と前記第2区間とを前記経路上に設定することにより前記動力源を利用する上での初期計画を作成する初期計画作成手段と、前記初期計画に基づいて前記報知手段が前記経路上において前記燃料の補充の必要性を報知する報知位置を推定する推定手段とをさらに備え、前記利用計画作成手段は、前記初期計画に基づいて推定された前記報知位置が前記報知禁止エリアに位置する場合には、前記報知位置が前記報知許可エリアに位置するように前記初期計画を補正して前記利用計画を作成することを要旨とする。
【0010】
この発明によれば、現在地から目的地までの経路に基づいて初期計画を作成することができるため、効率よく車両を走行させることができる。また、初期計画に基づいて推定された報知位置が報知禁止エリアに位置する場合には、初期計画に基づいて車両が走行すると報知禁止エリアにおいて給油の必要性が報知されてしまう。しかし、その初期計画を補正して報知許可エリアにおいて報知閾値となるように利用計画を作成することができるため、利用者の不安を低減させて燃料の補充の必要性を報知することができる。
【0011】
本発明の走行支援装置において、前記報知エリア設定手段は、前記現在地情報と前記施設位置情報とに基づき、前記経路設定手段が設定した前記経路において、前記補充施設の位置よりも前記現在地側に前記報知許可エリアを設定することを要旨とする。
【0012】
この発明によれば、目的地までの経路において報知許可エリアを補充施設の位置よりも現在地側に設定することにより、報知手段が燃料の補充の必要性を報知してから補充施設に到達するまでの経路上の距離を短くすることができる。
【0013】
本発明の走行支援装置において、前記経路沿いに複数の補充施設が存在する場合には、前記利用計画作成手段は、前記燃料の残量と前記モータに電力を供給する蓄電池に蓄電された電力によって到達できる範囲内の前記補充施設であって、且つ前記目的地に近い前記補充施設に対応する前記報知許可エリアに前記報知位置が位置するように前記利用計画を作成することを要旨とする。
【0014】
この発明によれば、燃料タンクにより多くの燃料を残存させた状態で目的地に到達することができるため、目的地到達後、更に別の地点へ移動したいという利用者の要望にも対応することが可能となる。
【0015】
また、上記問題点を解決するために、本発明の走行支援方法は、燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両の現在地を示す現在地情報を取得する現在地情報取得段階と、前記燃料タンク内の燃料の残量を示す残量情報を取得する残量情報取得段階と、記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定段階と、前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成段階と、前記現在地情報と前記利用計画作成段階において作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御段階と、前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知段階とを備えることを要旨とする。
【0016】
この発明によれば、上記走行支援装置に係る発明と同様の作用効果を奏し得る。
また、上記問題点を解決するために、本発明の走行支援プログラムは、燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両における制御装置が前記車両の走行を支援するために実行する走行支援プログラムであって、前記制御装置に、前記車両の現在地を示す現在地情報を取得する現在地情報取得ステップと、前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得ステップと、記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定ステップと、前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成ステップと、前記現在地情報と前記利用計画作成ステップにおいて作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御ステップと、前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知ステップとを実行させることを要旨とする。
【0017】
この発明によれば、上記走行支援装置に係る発明と同様の作用効果を奏し得る。
【図面の簡単な説明】
【0018】
【図1】車両のブロック図。
【図2】現在地から目的地までの初期計画を示す模式図。
【図3】利用計画作成ルーチンを示すフローチャート。
【図4】利用計画作成ルーチンを示すフローチャート。
【図5】給油ランプ点灯地点が点灯許可エリアに位置する場合の初期計画を示す模式図。
【図6】(a)は点灯許可エリアよりも現在地側に給油ランプ点灯地点が位置する場合の初期計画を示す模式図、(b)は補正後の利用計画を示す模式図。
【図7】(a)は到達可能位置までに複数の給油施設がある場合の初期計画を示す模式図、(b)は補正後の利用計画を示す模式図。
【図8】(a)は到達可能位置までに給油施設がない場合の初期計画を示す模式図、(b)は補正後の利用計画を示す模式図。
【発明を実施するための形態】
【0019】
以下、本発明を具体化した一実施形態を図1〜図8に従って説明する。
図1に示すように、車両11には、走行時に路面に接触する複数(本実施形態では4つ)の車輪12が回転可能に設けられていると共に、車輪12に駆動力を伝達する複数種類の動力源として内燃機関13とモータ14とが搭載されている。
【0020】
内燃機関13には、ガソリンなどの燃料を貯留可能な燃料タンク15が接続されている。さらに、車両11には、外部から燃料タンク15に燃料を供給するための供給口(図示略)が設けられている。そのため、ガソリンスタンドなどの給油施設(補充施設)16(図5参照)において、給油口から燃料タンク15への給油(燃料の補充)が可能になっている。
【0021】
また、モータ14には、該モータ14に電力を供給する蓄電池17が接続されている。さらに、車両11には、蓄電池17を外部から充電するための充電コネクタ(図示略)が設けられている。すなわち、蓄電池17は、コンセントや充電スタンドなどの充電設備が設けられた充電施設において、ケーブルなどの充電機器と充電コネクタとを接続することにより、商用電源などの外部電源から充電が可能になっている。
【0022】
なお、内燃機関13は、燃料タンク15から供給された燃料を燃焼させることにより動力を発生させる。一方、モータ14は、蓄電池17に蓄電された電力を回転エネルギーに変換することにより動力を発生させる。そして、車両11は、内燃機関13とモータ14とのうち、少なくとも一方を動力源として利用して車輪12を回転させることにより走行可能になっている。
【0023】
さらに、車両11には、燃料タンク15に貯留された燃料の残量19(図2参照)、蓄電池17の残電力量20(図2参照)、及び走行条件に基づいて、内燃機関13とモータ14の利用状態を制御する走行支援装置21が搭載されている。なお、走行条件とは、道路の傾斜や混雑状況、道幅や制限速度などが含まれ、車両11が道路を走行する際に燃費に影響を与える条件である。
【0024】
なお、図2では、下方に示す横長の四角形にて表されるバーにより、燃料タンク15に貯留可能な燃料の量(図中上側)と蓄電池17に蓄電可能な電力量(図中下側)とを模式的に表している。すなわち、それぞれ網掛け部分が燃料タンク15に貯留されている燃料の残量19と蓄電池17に蓄電されている残電力量20とを表している。さらに、図中上側のバーにおける白抜き部分が燃料タンク15に補充可能な燃料の量を表し、網掛け部分(残量19)と白抜き部分の合計(バー全体)が燃料タンク15の容量を表している。また、同様に、図中下側のバーにおける白抜き部分が蓄電池17に充電可能な電力量を表し、網掛け部分(残電力量20)と白抜き部分の合計(バー全体)が、蓄電池17の容量を表している。
【0025】
さて、図1に示すように、走行支援装置21は、燃料タンク15に残存する燃料の残量19を検出する残量検出センサ23と、蓄電池17に蓄電された残電力量20を検出する残電力量検出センサ24とを備えている。そして、残量検出センサ23及び残電力量検出センサ24には、制御手段及び制御装置としての制御部25が接続されていると共に、残量検出センサ23が検出した燃料の残量19を示す残量情報と残電力量検出センサ24が検出した残電力量20を示す残電力量情報とが制御部25により取得可能となっている。したがって、制御部25は、残量情報取得手段としても機能している。
【0026】
また、制御部25には、給油ランプ26、位置検出センサ27、操作ボタン28、記憶手段としての地図情報記憶部29が接続されている。そして、制御部25は、取得した残量情報に基づいて燃料タンク15内の燃料の残量19がメモリ(図示略)に記憶された報知閾値T1(図5参照)となったと判断した場合に、給油ランプ26を点灯制御することにより、利用者に給油の必要性を報知するようになっている。したがって、制御部25は、報知手段としても機能している。
【0027】
位置検出センサ27は、GPS受信部31が、GPS(Global Positioning System)衛星から受信した、緯度・経度等の座標を示す位置検出信号を入力して、電波航法により車両11の絶対位置を算出する。また、車速センサ32及びジャイロセンサ33が車速パルス及び角速度を検出し、この車速パルス及び角速度を用いる自律航法により、基準位置からの相対位置を算出する。そして、制御部25は、電波航法で算出した絶対位置と自律航法で算出した基準位置からの相対位置とを組み合わせて車両11の現在地35(図2参照)を特定し、特定された車両11の現在地35を示す位置情報を現在地情報として取得する。したがって、制御部25は、現在地情報取得手段としても機能している。
【0028】
さらに、操作ボタン28は、利用者が操作することにより、目的地36(図2参照)の設定が可能となっている。すなわち、制御部25は、操作ボタン28の操作に基づいて設定された目的地36の位置を示す目的地情報を取得する目的地情報取得手段としても機能している。
【0029】
そして、地図情報記憶部29には、道路の形状を表す道路データ38と、目的地36までの経路を探索するための経路データ39とが格納されている。さらに、地図情報記憶部29には、給油施設16の位置を示す施設位置情報としての給油施設データ40と、充電施設の位置を示す充電施設データ41とが格納されている。
【0030】
なお、道路データ38は、道路の形状を表すデータであって、ノード座標、形状補間点の座標、幅員、勾配、路面状態、混雑のしやすさ等が記憶されている。そして、本実施形態では、この道路データ38として記憶された各データが道路の走行条件を表すようになっている。また、経路データ39は、全国を区画したメッシュ内の道路に関するデータであって、各メッシュの識別子であるメッシュIDと、交差点、インターチェンジ、道路の端点等を示す要素であるノードのノードデータと、各ノードを接続する要素であるリンクのリンクデータとを有している。
【0031】
そして、図2に示すように、制御部25は、目的地36が設定されると、現在地情報、目的地情報、及び経路データ39に基づいて現在地35から目的地36までの経路43を設定する。したがって、制御部25は、経路設定手段としても機能している。なお、設定された経路43は、図示しないディスプレイに地図と共に表示されることにより、利用者を目的地36まで案内するようになっている。
【0032】
また、内燃機関13とモータ14とを動力源として利用する車両11では、走行条件に応じて内燃機関13とモータ14との利用状態を変更することにより、燃費を向上させることができる。具体的には、例えば渋滞区間では、内燃機関13を利用するよりもモータ14を利用する方が有利に走行することができる。また、上り坂区間では、モータ14を利用するよりも内燃機関13を利用する方が有利に走行することができる。
【0033】
そして、こうした燃費向上などを図るために、制御部25は、経路43を走行する際の動力源を利用する上での初期計画を道路データ38(走行条件)に基づいて作成する。したがって、制御部25は、初期計画作成手段としても機能している。
【0034】
ここで、図2では、内燃機関13が利用されずにモータ14のみが利用される状態をEV状態(第1利用状態)とすると共に、内燃機関13が少なくとも利用される状態をHV状態(第2利用状態)として表している。すなわち、HV状態とは、内燃機関13のみを利用する状態、もしくは内燃機関13とモータ14とを併用して利用する状態である。ただし、図面ではEV状態を単に「EV」と表すと共に、HV状態を単に「HV」として表している。
【0035】
さらに、図2は、上のグラフにおいて、道路データ38として記憶されている経路43の情報のうち、道路の勾配と混雑状態とを模式的に表している。すなわち、現在地35から目的地36までの経路43に対応する道路データ38としては、区間Aは、ほぼ平坦で閑散とした道路、区間Bは上り坂、区間Cは下り坂、区間Dは、平坦だが混雑する(渋滞しやすい)道路という情報(走行条件)が記憶されているものとする。
【0036】
そのため、制御部25は、道路データ38に基づいて区間AをEV状態にて走行する区間(第1区間)として設定すると共に、区間B及び区間CをHV状態にて走行する区間(第2区間)、区間DをEV状態にて走行する区間(第1区間)として設定する初期計画を作成する。
【0037】
したがって、実際に初期計画に基づいて車両11が走行すると、現在地35(走行開始時)において燃料タンク15に一杯に補充されていた燃料の残量19は、区間Aを走行する間は維持される。一方、蓄電池17に満充電されていた残電力量20は、区間Aを走行する間に減少する。
【0038】
さらに、区間Bを走行する場合には、内燃機関13とモータ14とが利用されるため、燃料の残量19と残電力量20が共に減少するのに対し、区間Cを走行する場合には、車輪12の回転(回生ブレーキ)によって蓄電池17が充電され、残電力量20が増加する。そして、区間Dを走行する場合には、燃料タンク15内の残量19が維持されるのに対し、残電力量20は減少する。
【0039】
なお、この初期計画は、特に目的地36と充電施設の位置とが一致している場合、もしくは目的地36の周辺に充電施設がある場合には、目的地36に到達した段階で蓄電池17に蓄電された電力を使い切るように作成するのが好ましい。
【0040】
続いて、図3及び図4に示す利用計画作成ルーチンをフローチャートに基づいて説明する。なお、利用計画作成ルーチンは、利用者によって操作ボタン28が操作されて目的地36が設定された場合に実行される。
【0041】
さて、ステップS101において、制御部25は、設定された目的地36の位置情報を目的地情報として取得すると共に、ステップS102において、位置検出センサ27の検出結果に基づいて、車両11の現在地を示す現在地情報を取得する(現在地情報取得段階、現在地情報取得ステップ)。そして、ステップS103において、制御部25は、取得した目的地情報と現在地情報と経路データ39とに基づいて、現在地35から目的地36までの経路43を設定する。
【0042】
さらに、ステップS104において、制御部25は、残量検出センサ23が検出した燃料の残量19を示す残量情報を取得する(残量情報取得段階、残量情報取得ステップ)と共に、ステップS105において、残電力量検出センサ24が検出した残電力量20を示す残電力量情報を取得する。そして、ステップS106において、制御部25は、残量情報、残電力量情報、現在地35から目的地36までの経路43、道路データ38に基づいて到達可能位置44(図5参照)を算出する。すなわち、到達可能位置44とは、燃料の残量19と蓄電池17の残電力量20が共にゼロとなると推定される位置である。
【0043】
そして、ステップS107において、制御部25は、目的地36と到達可能位置44とを比較することにより、目的地36まで走行する間に給油が必要となるか否かを判断する。すなわち、制御部25は、到達可能位置44よりも目的地36が遠い場合には給油が必要と判断し、到達可能位置44よりも目的地36が近い場合には給油が不要と判断する。
【0044】
さて、給油が不要である(ステップS107:NO)と判断した場合には、ステップS108において、制御部25は、図2に示すように、走行条件に応じて目的地36までの初期計画を作成する。ただし、給油が不要であると判断した場合の初期計画は、該初期計画に基づいて車両11が現在地35から目的地36まで走行した場合に、目的地36において燃料タンク15に報知閾値T1以上の燃料が残るように作成されるものとする。
【0045】
また、ステップS107において、給油が必要である(ステップS107:YES)と判断した場合には、ステップS109において、制御部25は、図5に示すように、到達可能位置44までの初期計画を作成する。
【0046】
すなわち、制御部25は、走行条件に応じて到達可能位置44までの初期計画を作成する。具体的には、制御部25は、経路43における現在地35から到達可能位置44までの区間を、道路データ38に基づいてEV状態にて走行する区間とHV状態にて走行する区間に区分けする。
【0047】
さらに、ステップS110において、制御部25は、残量19が報知閾値T1となる報知位置としての給油ランプ点灯地点45(図5参照)を推定する。したがって、制御部25は、推定手段としても機能している。
【0048】
具体的には、制御部25は、まず初期計画と道路データ38とに基づいて、経路43を構成するリンク列ごとに該リンク列を走行する際に使用する電力量と燃料の量をそれぞれ算出する。すなわち、制御部25は、EV状態にて走行する区間と対応するリンク列について、使用する電力量を算出する。さらに、制御部25は、HV状態にて走行する区間と対応するリンク列について、使用する電力量と燃料の量をそれぞれ算出する。そして、制御部25は、算出した電力量及び燃料の量と、ステップS104及びステップS105にて取得した燃料の残量19と残電力量20とに基づいて給油ランプ点灯地点45を推定する。
【0049】
そして、ステップS111において、制御部25は、報知許可エリアとしての点灯許可エリア46(図5参照)を設定すると共に、経路43において、点灯許可エリア46以外のエリアを、報知禁止エリアとしての点灯禁止エリア47(図5参照)と設定する(報知エリア設定段階、報知エリア設定ステップ)。また、この点で制御部25は、報知エリア設定手段としても機能している。
【0050】
この点灯許可エリア46とは、各給油施設16にそれぞれ対応付けて設定されるエリアであって、各給油施設16よりも現在地35側に経路43に沿って設定されるエリアである。そのため、点灯許可エリア46は、同じ給油施設16に対して設定される場合であっても、該給油施設16に対する現在地35の方角や給油施設16までの経路43によって変化する。具体的には、給油施設16から現在地35側に所定距離だけ離れた地点から給油施設16までの経路43上の区間が点灯許可エリア46として設定される。なお、この所定距離としては、給油ランプ26が点灯した状態で給油施設16まで走行する際に利用者が不安を感じない程度の距離(例えば給油施設16から1〜2km)が設定される。また、所定距離は、燃料の残量19が報知閾値T1となった時点から内燃機関13のみを用いて走行することが可能な距離以下に設定されることが好ましい。
【0051】
続いて、ステップS112において、制御部25は、給油ランプ点灯地点45が点灯許可エリア46に位置しているか否かを判断する。そして、給油ランプ点灯地点45が点灯許可エリア46に位置している(ステップS112:YES、図5参照)と判断した場合には、制御部25は、続くステップS113〜S117において、作成した初期計画と、走行する車両11の現在地情報に応じて動力源の利用制御を実行する。
【0052】
すなわち、まずステップS113では、制御部25は、ステップS102と同様に現在地情報を取得する。ただし、車両11の走行に伴って現在地35の位置は変化する。そして、ステップS114において、制御部25は、ステップS113において取得した現在地情報と初期計画とに基づいて利用する動力源を選択する。すなわち、制御部25は、車両11がEV状態にて走行する区間として計画された区間内に位置にする場合には、モータ14のみを動力源として選択するのに対し、HV状態にて走行する区間として計画された区間内に位置する場合には、動力源として少なくとも内燃機関13を選択する。
【0053】
さらに、ステップS115において、制御部25は、ステップS104と同様に残量情報を取得する。そして、ステップS116において、制御部25は、ステップS115において取得した残量情報に基づいて燃料タンク15内の燃料の残量19が報知閾値T1以下となったか否かを判断する。
【0054】
すなわち、燃料の残量19が報知閾値T1よりも多い(ステップS116:NO)と判断した場合には、制御部25は、給油の必要はないと判断してステップS113へ移行する。一方、燃料の残量19が報知閾値T1以下である(ステップS116:YES)と判断した場合には、制御部25は、給油の必要性があると判断し、ステップS117において給油ランプ26を点灯させることにより、給油の必要性を利用者に報知する(報知段階、報知ステップ)。
【0055】
また、ステップS112において、給油ランプ点灯地点45が点灯禁止エリア47(すなわち、点灯許可エリア46外)に位置する(ステップS112:NO)と判断した場合には、図4に示すように、ステップS118において、制御部25は、到達可能位置44までに給油施設16があるか否かを判断する。なお、このとき選択される給油施設16の有無は、経路43と、該経路43から所定の範囲(例えば両側100m)において判断される。
【0056】
そして、現在地35と到達可能位置44との間に給油施設16がある(ステップS118:YES、図6,図7参照)と判断した場合には、ステップS119において、制御部25は、現在地35と到達可能位置44との間に位置する給油施設16を、本車両11に給油を行う給油施設16として選択する。なお、現在地35と到達可能位置44との間に複数の給油施設16がある場合には、制御部25は、目的地36に最も近い給油施設16を選択する。つまり、複数の給油施設16がある場合には、燃料の残量19と残電力量20とによって到達できる範囲の給油施設16であって、且つ目的地36に近い給油施設16を選択する。
【0057】
さらに、ステップS120において、制御部25は、選択した給油施設16に対応する点灯許可エリア46を設定すると共に、経路43における点灯許可エリア46以外の場所を点灯禁止エリア47に設定する(報知エリア設定段階、報知エリア設定ステップ)。
【0058】
そして、続くステップS121において、制御部25は、点灯許可エリア46内に給油ランプ点灯地点45が位置するように、ステップS109にて作成した初期計画を補正して点灯許可エリア46までの利用計画を作成する(利用計画作成段階、利用計画作成ステップ)。したがって、制御部25は、利用計画作成手段としても機能している。ただし、初期計画を補正して利用計画を作成する具体的な方法は、フローチャートの説明の後に図5〜図8を用いて説明する。
【0059】
その後、制御部25は、ステップS113〜S117を実行する。すなわち、制御部25は、ステップS113において現在地情報を取得した後、ステップS114において、ステップS121にて作成した利用計画とステップS113にて取得した現在地情報とに基づいて利用する動力源を選択し、内燃機関13とモータ14とを制御する(制御段階、制御ステップ)。
【0060】
また、ステップS118において、現在地35と到達可能位置44との間に給油施設16がない(ステップS118:NO、図8参照)と判断した場合には、ステップS122において、制御部25は、現在地35と目的地36との間で経路43の再設定を行う。さらに、ステップS123において、制御部25は、新たに設定した経路43と、ステップS104,S105において取得した残量情報及び残電力量情報に基づいて到達可能位置44を算出する。
【0061】
その後、ステップS107に戻り、給油施設16まで到達可能な経路43が見つかるまでステップS107〜S123を繰り返し実行する。すなわち、制御部25は、目的地36までに給油が必要であるか否か、また現在地35と新たに算出した到達可能位置44との間に給油施設16があるか否かを判断し、利用計画を作成すると共に動力源の利用制御を実行する。
【0062】
次に、図5〜図8に基づいて、到達可能位置44と目的地36及び給油施設16の位置関係に応じた初期計画及び利用計画の作成について、目的地36まで走行するのに給油が必要な場合を例に説明する。
【0063】
さて、図5には、現在地35から目的地36までの経路43と、燃料の残量19及び残電力量20(図5では図示略)に基づいて算出された到達可能位置44とを示している。なお、この場合は、到達可能位置44よりも目的地36が遠いため、目的地36まで走行する間に給油が必要となる。
【0064】
そこで、制御部25は、まず到達可能位置44までの初期計画を作成し、該初期計画と現在地35(すなわち、出発地)における燃料の残量19に基づいて、残量19が報知閾値T1となる給油ランプ点灯地点45を推定する。より具体的には、経路43と初期計画と現在地35における燃料の残量19とに基づいて、経路43を走行した場合の経路43上の各地点における燃料の残量19を推定する。そして、推定した燃料の残量19が報知閾値T1以下となる地点を給油ランプ点灯地点45として推定する。さらに、制御部25は、経路43と給油施設データ40とに基づいて点灯許可エリア46と点灯禁止エリア47を設定する。
【0065】
すると、図5に示す初期計画では、給油ランプ点灯地点45が点灯許可エリア46に位置する。そのため、この場合には、現在地35から給油施設16まで走行する間は、初期計画に基づいて動力源の利用制御が実行される。そして、給油施設16において給油がされた後は、制御部25は、給油施設16を現在地35として目的地36までの初期計画を作成する。
【0066】
次に、図5と別の例として、図6に示す初期計画及び利用計画の作成について説明する。
なお、以下に示す図6〜図8のパターンにおいても、図5に示すパターンと同様に経路43、到達可能位置44、給油ランプ点灯地点45、点灯許可エリア46、点灯禁止エリア47が設定もしくは算出、推定されているものとする。
【0067】
すなわち、図6(a)に示す初期計画では、到達可能位置44と現在地35との間に給油施設16があると共に、給油ランプ点灯地点45が点灯許可エリア46よりも現在地35側の点灯禁止エリア47に位置している。
【0068】
さて、このような場合には、現在地35から点灯許可エリア46までの範囲(点灯禁止エリア47)において、EV状態にて走行する区間を増やすことにより、給油ランプ点灯地点45を目的地36側にずらすことができる。具体的には、図6(b)に示すように、制御部25は、まず点灯許可エリア46をHV状態にて走行する区間として設定する。さらに、制御部25は、点灯許可エリア46の開始位置に車両11が到達する際における燃料の残量19が報知閾値T1よりも多い補正閾値T2となるように、初期計画におけるHV状態にて走行する区間の一部又は全部を、EV状態にて走行する区間に置換することにより初期計画を補正して、利用計画を作成する。
【0069】
なお、補正閾値T2は、報知閾値T1との差分の燃料で走行可能な距離が点灯許可エリア46よりも短くなるように設定されている。さらに、点灯許可エリア46の開始位置に車両11が到達した以降はHV状態にて走行するため、点灯許可エリア46の開始位置における燃料の残量19が補正閾値T2以下となっていれば、点灯許可エリア46内での燃料の残量19が報知閾値T1となる。したがって、図6(b)に示す利用計画によって給油ランプ点灯地点45を点灯許可エリア46内に変更することができる。すなわち、初期計画を補正した利用計画に基づいて車両11を走行させることにより、点灯許可エリア46内において給油ランプ26を点灯させることができる。
【0070】
次に、図7に示す初期計画及び利用計画の作成について説明する。
図7(a)では、現在地35と到達可能位置44との間に複数の給油施設16(16a,16b)が位置している。そのため、制御部25は、給油施設16のうち、目的地36に近い給油施設16bを選択する。さらに、初期計画における給油ランプ点灯地点45は、当該選択した給油施設16bに対応する点灯許可エリア46よりも目的地36側の点灯禁止エリア47に位置している。
【0071】
そして、このような場合には、現在地35から点灯許可エリア46までの範囲において、HV状態にて走行する区間を増やすことにより、給油ランプ点灯地点45を現在地35側にずらすことができる。具体的には、この場合も図6(b)に示す場合と同様に、制御部25は、点灯許可エリア46をHV状態にて走行する区間として設定すると共に、点灯許可エリア46の開始位置に車両11が到達する際における燃料の残量19が、補正閾値T2となるように初期計画を補正する(図7(b)参照)。なお、この場合には、制御部25は、点灯許可エリア46の開始位置に車両11が到達する際における燃料の残量が報知閾値T1よりも多い補正閾値T2となるように、初期計画におけるEV状態にて走行する区間の一部又は全部を、HV状態にて走行する区間に置換することにより、初期計画を補正して利用計画を作成する。すると、図7(b)に示す利用計画に基づいて車両11が走行することにより、給油ランプ点灯地点45を点灯許可エリア46内に変更し、点灯許可エリア46において給油ランプ26を点灯させることができる。
【0072】
次に、図8に示す初期計画及び利用計画の作成について説明する。
図8(a)に示すように、現在地35と到達可能位置44との間に給油施設16がない場合には、図8(b)に示すように、現在地35と目的地36との間で経路43を再設定すると共に、残量情報及び残電力量情報と、新たに設定された経路43とに基づいて到達可能位置44が算出される。
【0073】
そして、新たに設定した経路43において到達可能な給油施設16が見つかると、制御部25は、新たに設定した経路43をディスプレイ(図示略)に表示する。さらに、制御部25は、給油施設16に対応する点灯許可エリア46及び点灯禁止エリア47を設定し、点灯許可エリア46において燃料の残量が報知閾値T1となるように点灯許可エリア46までの初期計画、又は利用計画を作成する。
【0074】
上記実施形態によれば、以下のような効果を得ることができる。
(1)燃料の残量19を点灯許可エリア46において報知閾値T1とすることができるため、車両11が点灯許可エリア46を走行中に給油ランプ26を点灯させて給油の必要性を報知させることができる。したがって、例えば、給油ランプ26が点灯禁止エリア47において点灯してからモータ14を用いて給油施設16まで走行するような場合と比べ、給油ランプ26が点灯してから給油施設16に到達するまでの距離を短くすることができる。そのため、利用者の不安を低減させて給油の必要性を報知することができる。
【0075】
(2)現在地35から目的地36までの経路43に基づいて初期計画を作成することができるため、効率よく車両を走行させることができる。また、初期計画に基づいて推定された給油ランプ点灯地点45が点灯禁止エリア47に位置する場合には、初期計画に基づいて車両11が走行すると点灯禁止エリア47において給油ランプ26が点灯してしまう。しかし、その初期計画を補正して点灯許可エリア46において報知閾値T1となるように利用計画を作成することができるため、利用者の不安を低減させて燃料の補充の必要性を報知することができる。
【0076】
(3)目的地36までの経路43において点灯許可エリア46を給油施設16の位置よりも現在地35側に設定することにより、給油ランプ26が点灯してから給油施設16に到達するまでの経路43上の距離を短くすることができる。
【0077】
(4)経路43に複数の給油施設16がある場合には、目的地36に近い給油施設16を選択することにより、燃料タンク15により多くの燃料を残存させた状態で目的地36に到達することができる。そのため、目的地36に到達後、更に別の地点へ移動したいという利用者の要望にも対応することが可能となる。
【0078】
なお、上記実施形態は以下のように変更してもよい。
・上記実施形態において、走行支援装置21は、ディスプレイに地図と経路43とを表示して車両11を目的地36まで案内するナビゲーション装置とし、ディスプレイを介して給油の必要性を報知するようにしてもよい。また、スピーカを用いて音声や警告音により利用者に給油の必要性の報知するようにしてもよい。
【0079】
・上記実施形態において、給油ランプ26は、燃料の残量19が報知閾値T1未満となったときに点灯するようにしてもよい。
・上記実施形態において、現在地35の位置情報も目的地36の位置情報と同様に操作ボタン28の操作によって利用者が入力するようにしてもよい。また、車速センサ32及びジャイロセンサ33を設けず、制御部25は、GPS受信部31が受信した情報を現在地情報として取得するようにしてもよい。
【0080】
・上記実施形態において、点灯許可エリア46を給油施設16の所定範囲(例えば給油施設16から1〜2kmの範囲)内と設定してもよい。すなわち、現在地情報を用いずに点灯許可エリア46と点灯禁止エリア47とを設定してもよい。そして、この場合には、経路43において、点灯許可エリア46に到達する際に補正閾値T2となるように利用計画が作成される。
【0081】
・上記実施形態において、給油対象となる給油施設16は、走行車線側に位置する給油施設16のみとしてもよく、また、中央分離帯が無い道路においてのみ反対車線側の給油施設16を含めるようにしてもよい。そして、現在地35から到達可能位置44までの間に複数の給油施設16がある場合には、最も現在地35側に位置する給油施設16や、推定された給油ランプ点灯地点45に最も近い給油施設16を選択するようにしてもよい。さらに、給油施設16は、利用者に選択させるようにしてもよい。
【0082】
・上記実施形態において、初期計画の補正が必要であると判断した場合には、制御部25は、点灯許可エリア46内の任意の地点を選択し、該地点に到達する際に燃料の残量19が報知閾値T1となるように初期計画を補正して、利用計画を作成してもよい。なお、この場合は、補正閾値T2を記憶しておかなくてもよい。
【0083】
・上記実施形態において、目的地36及び経路43の設定と、初期計画の作成と、給油ランプ点灯地点45の推定と、を行わないようにしてもよい。すなわち、例えば、制御部25は、燃料の残量19が補正閾値T2になるまで現在地情報と道路データ38とに基づいて車両11を走行させる。そして、燃料の残量19が補正閾値T2となった地点以降は、当該地点から点灯許可エリア46に到達するまでの区間をEV状態にて走行する区間として設定すると共に、点灯許可エリア46をHV状態にて走行する区間として設定することにより、利用計画を作成してもよい。
【0084】
すなわち、このような利用計画を設定した場合には、点灯禁止エリア47において燃料の残量19が補正閾値T2となる。しかし、制御部25は、残量19が補正閾値T2となったと判断すると、点灯許可エリア46に到達するまではモータ14のみで車両11を走行させるため、給油ランプ26の点灯が抑制される。そして、点灯許可エリア46まで到達すると、内燃機関13が利用されるため、点灯許可エリア46内において給油ランプ26を点灯させることができる。
【0085】
・上記実施形態において、燃料の残量19及び残電力量20に基づいて現在地35から到達可能な範囲に存在する充電施設に到達する際に残電力量20を使い切るように利用計画を作成するようにしてもよい。ただし、このときの利用計画についても、点灯許可エリア46において残量19が報知閾値T1となるように作成される。
【0086】
・上記実施形態において、図6(a)に示すように、到達可能位置44と給油ランプ点灯地点45との間に給油施設16がある場合には、制御部25は、燃料の残量19が補正閾値T2になるまで初期計画に基づいて車両11を走行させるようにしてもよい。そして、補正閾値T2となった地点以降は、当該地点から点灯許可エリア46の開始点に到達するまでの区間をEV状態にて走行する区間として設定すると共に、点灯許可エリア46をHV状態にて走行する区間として設定する。
【0087】
このように、道路データ38に基づいて先に作成した初期計画に従って車両11を走行させると共に、補正閾値T2となった後の初期計画を補正して利用計画を作成することにより、燃費を向上させることができると共に、点灯許可エリア46内において給油ランプ26を点灯させることができる。
【0088】
・上記実施形態において、内燃機関13は、燃料を燃焼させることにより車輪12を回転させる動力を発生させることができればよく、燃焼させる燃料も、ガソリン、軽油、灯油、バイオ燃料、気体燃料(液化石油ガス、天然ガスなど)など任意に選択することができる。
【0089】
・上記実施形態において、モータ14に電力を供給可能な蓄電池17の代わりに燃料電池(発電装置)を設けるようにしてもよい。この場合には、残存する原料(例えば水素)の量に応じて到達可能位置44を算出するようにしてもよい。
【符号の説明】
【0090】
11…車両、13…内燃機関、14…モータ、15…燃料タンク、16…給油施設(補充施設)、17…蓄電池、19…残量、21…走行支援装置、25…制御部(制御手段、現在地情報取得手段、残量情報取得手段、報知手段、報知エリア設定手段、利用計画作成手段、目的地情報取得手段、経路設定手段、初期計画作成手段、推定手段、制御装置)、29…地図情報記憶部(記憶手段)、35…現在地、36…目的地、40…給油施設データ(施設位置情報)、43…経路、45…給油ランプ点灯地点(報知位置)、46…点灯許可エリア(報知許可エリア)、47…点灯禁止エリア(報知禁止エリア)、T1…報知閾値。
【特許請求の範囲】
【請求項1】
燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両に搭載される走行支援装置であって、
前記燃料の補充が可能な補充施設の位置を示す施設位置情報を記憶する記憶手段と、
前記車両の現在地を示す現在地情報を取得する現在地情報取得手段と、
前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得手段と、
前記燃料の残量が報知閾値となった場合に前記燃料の補充の必要性を報知する報知手段と、
前記施設位置情報に基づいて前記報知手段による報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定手段と、
前記報知許可エリアにおいて前記燃料の残量が前記報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成手段と、
前記現在地情報と前記利用計画作成手段が作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御手段と
を備えることを特徴とする走行支援装置。
【請求項2】
目的地の位置を示す目的地情報を取得する目的地情報取得手段と、
前記現在地から前記目的地までの経路を設定する経路設定手段と、
前記経路に基づいて前記第1区間と前記第2区間とを前記経路上に設定することにより前記動力源を利用する上での初期計画を作成する初期計画作成手段と、
前記初期計画に基づいて前記報知手段が前記経路上において前記燃料の補充の必要性を報知する報知位置を推定する推定手段と
をさらに備え、
前記利用計画作成手段は、前記初期計画に基づいて推定された前記報知位置が前記報知禁止エリアに位置する場合には、前記報知位置が前記報知許可エリアに位置するように前記初期計画を補正して前記利用計画を作成することを特徴とする請求項1に記載の走行支援装置。
【請求項3】
前記報知エリア設定手段は、前記現在地情報と前記施設位置情報とに基づき、前記経路設定手段が設定した前記経路において、前記補充施設の位置よりも前記現在地側に前記報知許可エリアを設定することを特徴とする請求項2に記載の走行支援装置。
【請求項4】
前記経路沿いに複数の補充施設が存在する場合には、前記利用計画作成手段は、前記燃料の残量と前記モータに電力を供給する蓄電池に蓄電された電力によって到達できる範囲内の前記補充施設であって、且つ前記目的地に近い前記補充施設に対応する前記報知許可エリアに前記報知位置が位置するように前記利用計画を作成することを特徴とする請求項2又は請求項3に記載の走行支援装置。
【請求項5】
燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両の現在地を示す現在地情報を取得する現在地情報取得段階と、
前記燃料タンク内の燃料の残量を示す残量情報を取得する残量情報取得段階と、
記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定段階と、
前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成段階と、
前記現在地情報と前記利用計画作成段階において作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御段階と、
前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知段階と
を備えることを特徴とする走行支援方法。
【請求項6】
燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両における制御装置が前記車両の走行を支援するために実行する走行支援プログラムであって、
前記制御装置に、
前記車両の現在地を示す現在地情報を取得する現在地情報取得ステップと、
前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得ステップと、
記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定ステップと、
前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成ステップと、
前記現在地情報と前記利用計画作成ステップにおいて作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御ステップと、
前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知ステップと
を実行させることを特徴とする走行支援プログラム。
【請求項1】
燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両に搭載される走行支援装置であって、
前記燃料の補充が可能な補充施設の位置を示す施設位置情報を記憶する記憶手段と、
前記車両の現在地を示す現在地情報を取得する現在地情報取得手段と、
前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得手段と、
前記燃料の残量が報知閾値となった場合に前記燃料の補充の必要性を報知する報知手段と、
前記施設位置情報に基づいて前記報知手段による報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定手段と、
前記報知許可エリアにおいて前記燃料の残量が前記報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成手段と、
前記現在地情報と前記利用計画作成手段が作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御手段と
を備えることを特徴とする走行支援装置。
【請求項2】
目的地の位置を示す目的地情報を取得する目的地情報取得手段と、
前記現在地から前記目的地までの経路を設定する経路設定手段と、
前記経路に基づいて前記第1区間と前記第2区間とを前記経路上に設定することにより前記動力源を利用する上での初期計画を作成する初期計画作成手段と、
前記初期計画に基づいて前記報知手段が前記経路上において前記燃料の補充の必要性を報知する報知位置を推定する推定手段と
をさらに備え、
前記利用計画作成手段は、前記初期計画に基づいて推定された前記報知位置が前記報知禁止エリアに位置する場合には、前記報知位置が前記報知許可エリアに位置するように前記初期計画を補正して前記利用計画を作成することを特徴とする請求項1に記載の走行支援装置。
【請求項3】
前記報知エリア設定手段は、前記現在地情報と前記施設位置情報とに基づき、前記経路設定手段が設定した前記経路において、前記補充施設の位置よりも前記現在地側に前記報知許可エリアを設定することを特徴とする請求項2に記載の走行支援装置。
【請求項4】
前記経路沿いに複数の補充施設が存在する場合には、前記利用計画作成手段は、前記燃料の残量と前記モータに電力を供給する蓄電池に蓄電された電力によって到達できる範囲内の前記補充施設であって、且つ前記目的地に近い前記補充施設に対応する前記報知許可エリアに前記報知位置が位置するように前記利用計画を作成することを特徴とする請求項2又は請求項3に記載の走行支援装置。
【請求項5】
燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両の現在地を示す現在地情報を取得する現在地情報取得段階と、
前記燃料タンク内の燃料の残量を示す残量情報を取得する残量情報取得段階と、
記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定段階と、
前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成段階と、
前記現在地情報と前記利用計画作成段階において作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御段階と、
前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知段階と
を備えることを特徴とする走行支援方法。
【請求項6】
燃料タンクに貯留された燃料を燃焼させて動力を発生させる内燃機関及び電力によって回転するモータのうち少なくとも一方を動力源に利用して走行可能な車両における制御装置が前記車両の走行を支援するために実行する走行支援プログラムであって、
前記制御装置に、
前記車両の現在地を示す現在地情報を取得する現在地情報取得ステップと、
前記燃料タンク内の前記燃料の残量を示す残量情報を取得する残量情報取得ステップと、
記憶手段に記憶された前記燃料の補充が可能な補充施設の位置を示す施設位置情報に基づいて、前記燃料の補充の必要性の報知を許可する報知許可エリア及び報知を禁止する報知禁止エリアを設定する報知エリア設定ステップと、
前記報知許可エリアにおいて前記燃料の残量が報知閾値となるように、前記動力源として前記内燃機関が利用されずに前記モータが利用される第1利用状態にて走行する第1区間と、前記動力源として前記内燃機関が少なくとも利用される第2利用状態にて走行する第2区間とを設定することにより、前記動力源の利用計画を作成する利用計画作成ステップと、
前記現在地情報と前記利用計画作成ステップにおいて作成した前記利用計画に基づき、前記モータと前記内燃機関とを制御する制御ステップと、
前記燃料の残量が前記報知閾値となった場合に前記燃料の補充の必要性を報知する報知ステップと
を実行させることを特徴とする走行支援プログラム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−106616(P2012−106616A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−256852(P2010−256852)
【出願日】平成22年11月17日(2010.11.17)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月17日(2010.11.17)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]