
走行支援装置
【課題】 交差点における接触の慮を低減することが可能な走行支援装置を提供すること。
【解決手段】 走行支援ECU8によって、後続車の有無が判定され、その判定結果に基づいて、自車両の交差点への進入を抑制する進入抑制制御を実行するか否かを判断する。これにより、進入抑制制御を実行した場合には、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。また、進入抑制制御を実行しなかった場合には、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。
【解決手段】 走行支援ECU8によって、後続車の有無が判定され、その判定結果に基づいて、自車両の交差点への進入を抑制する進入抑制制御を実行するか否かを判断する。これにより、進入抑制制御を実行した場合には、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。また、進入抑制制御を実行しなかった場合には、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行支援装置に関する。
【背景技術】
【0002】
従来、交差点における車両の安全性を高めるために様々な技術が提案されている。たとえば、特許文献1においては、自車両が交差点を通過するときの信号機の点灯状態を予測し、予測した信号機点灯状態が黄色または赤色である場合に、運転者に対する警報や自車両に対する強制制動を行う信号情報提供装置が開示されている。また、特許文献1に開示された信号情報提供装置は、自車両の方向指示器がON状態である場合に、警報や強制制動を行わないことで、無用な信号情報の提供を回避している。
【特許文献1】特開2002−373396号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載の従来技術では、自車両が交差点に進入する直前に、運転者が方向指示器をON状態からOFF状態へ切換えた場合、その直後に強制制動が行われる。このとき、自車両の後方を走行する後続車が存在すると、自車両と後続車との接触の慮が高まる。
【0004】
また、自車両が交差点に進入する直前に、運転者が方向指示器を意図的にOFF状態からON状態へ切換えた場合、警報や強制制動を解除して交差点への進入が可能となり、交差点内における他車両や歩行者等との接触の慮が高まる。
【0005】
本発明は、このような課題を解決するために成されたものであり、交差点内外における接触の慮を低減することが可能な走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、交差点の信号機情報を取得し、取得した信号機情報に基づいて自車両が交差点を通過する際の信号機状態を予測し、予測した信号機状態が黄色状態又は赤色状態である場合に、自車両の交差点への進入を抑制する進入抑制制御を実行し、自車両の方向指示器の作動状態がON状態である場合に、進入抑制制御を実行しない走行支援装置において、自車両の後方を走行する後続車が存在するか否かを判定する後続車判定手段を備え、方向指示器の作動状態及び後続車判定手段による判定結果に基づいて、進入抑制制御を実行するか否かを判断することを特徴とする。
【0007】
このような走行支援装置によれば、交差点の信号機情報に基づいて自車両の交差点への進入を抑制する進入抑制制御を実行し、自車両の方向指示器の作動状態がON状態である場合に、進入抑制制御を実行しない走行支援装置において、後続車の有無に応じて進入抑制制御を実行するか否かを判断することができる。これにより、進入抑制制御を実行した場合には、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。また、進入抑制制御を実行しなかった場合には、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。なお、「進入抑制制御」とは、例えば停止線を越えて、交差点内に自車両が進入しようとすることを抑制しようとする制御であり、制動装置を用いた減速制御、内燃機関を用いた減速制御、運転者に減速を促すための警報制御、運転者に信号情報を提供する報知制御等を含んでいる。
【0008】
また、方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、切換え検出手段によってOFF状態への切換えが検出され、後続車判定手段によって後続車が存在すると判定された場合に、進入抑制制御を実行しないことが好ましい。これにより、後続車が存在すると判定され、方向指示器の作動状態がOFF状態である場合であっても、進入抑制制御を実行しないため、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。
【0009】
さらに、後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段を更に備え、後続車方向指示器判定手段によって後続車の方向指示器の作動状態がON状態であると判定された場合にのみ、進入抑制制御を実行しないことが好ましい。ここで、後続車の方向指示器の作動状態がOFF状態である場合、この後続車は交差点を直進するものと推定され、信号機状態(黄色状態/赤色状態)に応じて減速することとなり、前方の自車両と不意に接近する可能性は低い。このとき、走行支援装置によって進入抑制制御を実行しても、自車両の急制動による後続車との接触の慮は低いため、後続車との接触の慮を低減しつつ、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。
【0010】
また、方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、切換え検出手段によってON状態への切換えが検出され、後続車判定手段によって後続車が存在しないと判定された場合に、進入抑制制御を実行することが好ましい。これにより、運転者が方向指示器を意図的にOFF状態からON状態に切換えた場合であっても、後続車が存在しないと判定された場合には、進入抑制制御を実行して自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することが可能となる。また、後続車が存在しないと判定された場合に、進入抑制制御を実行するため、自車両と後続車との接触する慮がない。
【0011】
また、方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段と、後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段とを更に備え、切換え検出手段によってON状態への切換えが検出され、後続車方向指示器判定手段によって後続車の方向指示器の作動状態がOFF状態であると判定された場合に、進入抑制制御を実行することが好ましい。これにより、運転者が方向指示器を意図的にOFF状態からON状態に切換えた場合であっても、後続車の方向指示器がOFF状態であると判定された場合には、進入抑制制御を実行して自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することが可能となる。また、後続車の方向指示器がOFF状態であると判定された場合には、後続車は信号機状態(黄色状態、赤色状態)に応じて減速するため、進入抑制制御を実行しても、前方の自車両と不意に接近する可能性は低く、後続車による接触の慮が低減される。
【発明の効果】
【0012】
本発明の走行支援装置によれば、交差点内外における接触の慮を低減することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明における実施形態について図面を参照して説明する。なお、図面の説明において、同一または相当要素には同一の符号を付し、重複する説明は省略する。また、本実施形態においては、右折矢灯付き信号機を備えた交差点に自車両が進入する場合について説明する。
【0014】
本実施形態に係る走行支援装置1は、車両に搭載され、車両進行方向の直近の信号機の表示状態(信号機状態)に基づいて走行を支援するものである。この走行支援装置1は、自車両の交差点通過時に予測される表示状態が黄色状態又は赤色状態である場合に、交差点への進入を抑制する進入抑制制御を行い、自車両の方向指示器がON状態である場合に、進入抑制制御を中止するものである。
【0015】
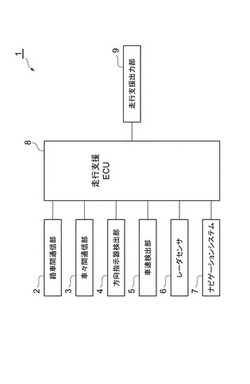
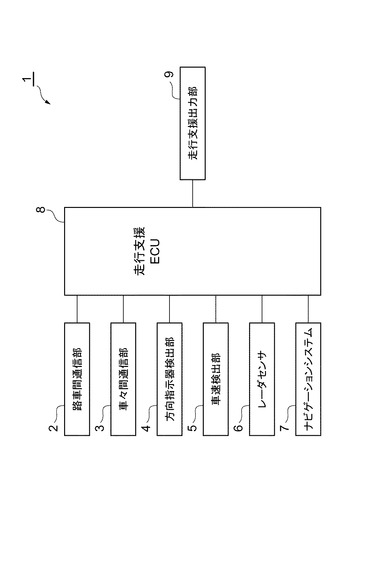
図1は、本発明の実施形態に係る走行支援装置を示すブロック構成図である。図1に示すように、走行支援装置1は、装置全体の制御を司る走行支援ECU8を備えている。走行支援ECU8には、路車間通信部2、車々間通信部3、方向指示器検出器4、車速検出部5、レーダセンサ6、ナビゲーションシステム7、及び走行支援出力部9が電気的に接続されている。
【0016】
路車間通信部2は、道路に設置される光ビーコンなどの路側通信機と通信を行い、車両進行方向の直近の信号機の表示状態などの信号機情報を取得する。路車間通信部2は、取得した信号機情報を走行支援ECU8に送信する。車々間通信部3は、自車両と他車両との通信を行い、他車両の現在位置や方向指示器の作動状態などの他車両情報を取得する。車々間通信部3は、取得した他車両情報を走行支援ECU8に送信する。
【0017】
方向指示器検出部4は、運転者による方向指示器の操作を検知することにより、方向指示器の作動状態がON状態であるかOFF状態であるかを検出する。方向指示器検出部4は、検出した方向指示器の作動状態を方向指示情報として走行支援ECU8に送信する。
【0018】
車速検出部5は、車輪に設けられ、車輪の回転を検出する車輪速センサを備えている。車速検出部5は、車輪速センサが検出した車輪の回転に基づいて、自車両の車速を算出する。車速検出部5は、算出した車速を車速信号として走行支援ECU8に送信する。
【0019】
レーダセンサ6は、ミリ波信号を自車両周囲に送信し、その反射波を受信することにより、自車両周囲の他車両(後続車)及び他車両の位置を検出するセンサである。レーダセンサ6は、検出した他車両及び他車両の位置を他車両検出信号として走行支援ECU8に送信する。
【0020】
ナビゲーションシステム7は、GPS(Global Positioning System)を内蔵し、地図データベースを有している。ナビゲーションシステム7は、GPSの検知信号に基づいて地図上における自車両位置を認識すると共に、地図データベースに基づいて自車両周辺の信号機の位置を認識する。ナビゲーションシステム7は、認識した自車両位置及び信号機の位置を位置データ信号として走行支援ECU8に送信する。
【0021】
走行制御ECU8は、演算処理を行うCPU(Central Processing Unit)、記憶部となるROM(Read Only Memory)及びRAM(Random Access Memory)、入力信号回路、出力信号回路、電源回路などにより構成された電子制御ユニットである。
【0022】
走行支援ECU8は、信号機状態に基づいて自車両の交差点進入時における信号機状態を予測し、予測した信号機の表示状態に基づいて、自車両の交差点への進入を抑制する進入抑制制御を実行するか否かを判断する。走行支援ECU8は、進入抑制制御を実行すると判断した場合に走行支援出力部9に制御信号を送信する。なお、「交差点進入時」とは、例えば停止線を越えて、交差点内に自車両が進入する時点である。
【0023】
また、走行支援ECU8は、自車両の後方を走行する後続車が存在するか否かを判定する後続車判定手段として機能する。走行支援ECU8は、レーダセンサ6からの情報に基づいて、後続車が存在するか否かを判定することができる。なお、自車両に隣接する走行レーンにおいて、自車両の後方を走行する車両は、後続車と判定しないものとする。
【0024】
また、走行支援ECU8は、自車両の方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段として機能する。走行支援ECU8は、方向指示器検出部4、車速検出部5、及びナビゲーションシステム7からの情報に基づいて、交差点に近づく途中で、自車両の方向指示器が切換えられたか否かを検出することができる。
【0025】
また、走行支援ECU8は、後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段として機能する。走行支援ECU8は、車々間通信部3からの情報に基づいて、後続車の方向指示器の作動状態を判定することができる。
【0026】
ここで、走行支援ECU8は、自車両の方向指示器の作動状態(ON/OFF状態)及び後続車の有無に応じて進入抑制制御を実行するか否かを判断することができる。走行支援ECU8は、例えば、交差点の停止線の手前20mから50mの間で、方向指示器の切換えを検出し、進入抑制制御を実行するか否かを判断する。なお、この判断を行う位置(交差点の停止線の手前20mから50mの間)は、自車両Mの車速、交差点との距離に基づいて、変更可能である。
【0027】
また、走行支援ECU8では、交差点に近づく途中で自車両の方向指示器のON状態からOFF状態への切換えが検出され、かつ、後続車が存在すると判定された場合には、進入抑制制御を中止することができる。また、走行支援ECU8では、後続車が存在する場合において、後続車の方向指示器がON状態であると判定された場合にのみ、進入抑制制御を中止することができる。すなわち、後続車が存在すると判定された場合であっても、後続車の方向指示器がOFF状態である場合には、進入抑制制御を実行する。
【0028】
また、走行支援ECU8では、交差点に近づく途中で自車両の方向指示器のOFF状態からON状態への切換えが検出され、かつ、後続車が存在しないと判定された場合には、進入抑制制御を実行することができる。
【0029】
また、走行支援ECU8では、交差点に近づく途中で自車両の方向指示器のOFF状態からON状態への切換えが検出され、かつ、方向指示器がOFF状態の後続車が存在すると判定された場合には、進入抑制制御を実行することができる。
【0030】
走行支援出力部9は、車室内に設けた警報装置と車輪毎に設けたブレーキアクチュエータとを備えている。走行支援出力部9は、走行支援ECU8から抑制制御信号を送信された場合に、警報装置により運転者に対して警報を発すると共に、ブレーキアクチュエータにより自車両に対して強制的に車両制動を行う。
【0031】
次に、図2〜図5を参照して、右折矢灯付き信号機を備えた交差点に自車両が進入する場合における走行支援装置の動作を説明する。なお、本実施形態では、右折矢灯付き信号機は、信号機本体Shと右折矢灯Srとを備え、その表示状態のサイクルは、信号機本体Shの青色状態を始めとして、黄色状態、赤色状態、右折矢灯Srの青色状態、信号機本体Shの黄色状態、赤色状態を経て、信号機本体Shの青色状態に戻るサイクルである。
【0032】
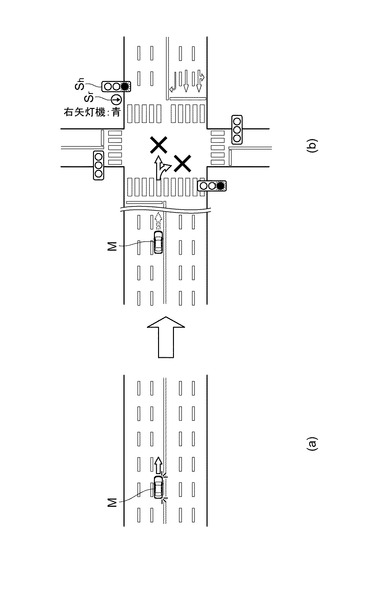
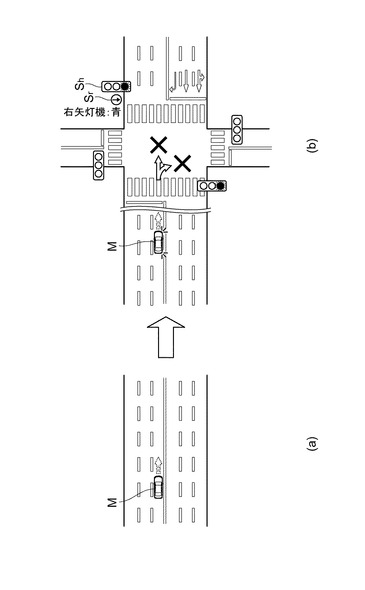
図2は、交差点に近づく途中で方向指示器がOFF状態へ切換えられ、かつ、後続車が存在しない場合における走行支援装置の動作を説明するための概略平面図である。図2(a)に示すように、自車両Mは、右側方向指示器をON状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のON状態を検出し、右折矢灯Srの青色状態での右折車の進入と推定する。
【0033】
その後、自車両Mは、図2(b)に示すように、後続車が存在しない状態で、右側方向指示器がOFF状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がOFF状態に切換えられ、かつ、後続車が存在しないと判定し、信号機本体Shの赤色状態での直進車の信号無視進入と推定して、進入抑制制御を実行すると判断する。これにより、後続車が存在しない状態で強制制動が実行され、自車両Mの交差点への進入が抑制される。その結果、交差点内における接触の慮が低減される。
【0034】
なお、自車両Mの直後に後続車が存在しない場合には、後続車が存在しないと判定して、進入抑制制御を実行する。具体的には、自車両Mと後続車との距離、相対速度に基づいて、自車両が強制制動を実行しても、後続車の走行に影響を与えないと判断できる場合には、後続車は存在しないと判定することができ、進入抑制制御を実行すると判断できる。
【0035】
また、後続車が直進車であると判定される場合には、進入抑制制御を実行する。具体的には、後続車の方向指示器のOFF状態を検出し、後続車が直進車であると判定し、進入抑制制御を実行すると判断する。
【0036】
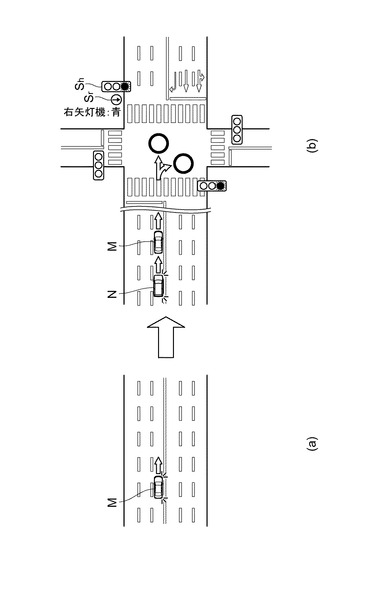
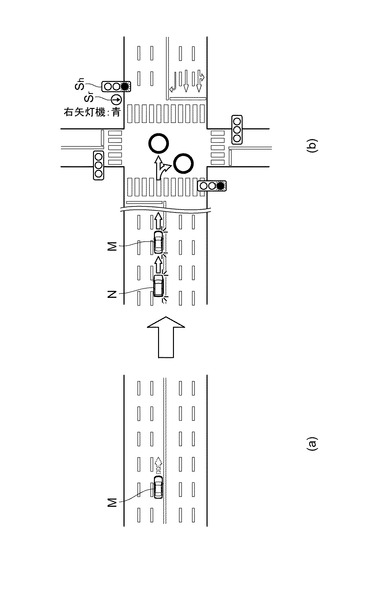
図3は、交差点近づく途中で方向指示器がOFF状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。図3(a)に示すように、自車両Mは、右側方向指示器をON状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のON状態を検出し、右折矢灯Srの青色状態での右折車の進入と推定する。
【0037】
その後、自車両Mは、図3(b)に示すように、右側方向指示器がON状態である後続車Nが存在する状態で、右側方向指示器がOFF状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がOFF状態に切換えられ、かつ、右側方向指示器がON状態である後続車Nが存在すると判定して、進入抑制制御を実行しないと判断する。これにより、右側方向指示器がON状態である後続車が存在する状態での強制制動が回避される。その結果、自車両Mと後続車Nとの接触の慮が低減される。
【0038】
図4は、交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、後続車が存在しない場合における走行支援装置の動作を説明するための概略平面図である。図4(a)に示すように、自車両Mは、右側方向指示器をOFF状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のOFF状態を検出し、信号機本体Shの赤色状態での直進車の信号無視進入と推定する。
【0039】
その後、自車両Mは、図4(b)に示すように、後続車が存在しない状態で、右側方向指示器がON状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がON状態に切換えられ、かつ、後続車が存在しないと判定し、信号機本体Shの赤色状態での直進車の信号無視進入と推定して、進入抑制制御を実行すると判断する。これにより、後続車が存在しない状態で強制制動が実行され、自車両Mの交差点への進入が抑制される。すなわち、交差点へ近づく途中で、運転者が意図的に右側方向指示器をOFF状態からON状態へ切換えて、警報や強制制動を解除して交差点に進入することが抑制される。その結果、交差点内における接触の慮が低減される。
【0040】
なお、後続車が直進車であると判定された場合には、進入抑制制御を実行する。具体的には、後続車の方向指示器のOFF状態を検出し、後続車が直進車であると判定し、進入抑制制御を実行すると判断する。
【0041】
図5は、交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。図5(a)に示すように、自車両Mは、右側方向指示器をOFF状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のOFF状態を検出し、信号機本体Shの赤色状態での直進車の信号無視進入と推定する。
【0042】
その後、自車両Mは、図5(b)に示すように、右側方向指示器がON状態である後続車Nが存在する状態で、自車両Mの右側方向指示器がON状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がON状態に切換えられ、かつ、右側方向指示器がON状態である後続車Nが存在すると判定して、進入抑制制御を実行しないと判断する。これにより、右側方向指示器がON状態である後続車Nが存在する状態での強制制動が回避される。その結果、自車両Mと後続車Nとの接触の慮が低減される。
【0043】
次に、図6〜図8を参照して、走行支援ECU8において実行される制御処理について説明する。図6は、本実施形態に係る走行支援ECU8で実行される制御処理を示すフローチャートである。
【0044】
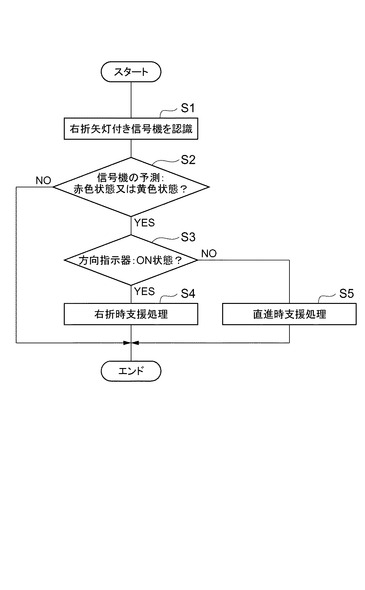
まず、走行支援ECU8は、路車間通信部2から送信された信号機情報に基づいて、右折矢灯付き信号機を認識する(S1)。また、走行支援ECU8は、車速検出部5から送信された車速信号、ナビゲーションシステム7から送信された位置データ信号、及び路車間通信部2から送信された信号機情報に基づいて、自車両Mの交差点進入時における右折矢灯付き信号機の表示状態を予測する。
【0045】
続いて、走行支援ECU8は、予測した右折矢灯付き信号機の表示状態に基づいて、自車両Mの交差点進入時における信号機本体Shの表示状態が青色状態、黄色状態、赤色状態のいずれの状態であるかを判定する(S2)。信号機本体Shの表示状態が黄色状態又は赤色状態であると判定された場合には、ステップ3に進み、青色状態であると判定された場合には、処理を終了する。
【0046】
ステップ3では、ナビゲーションシステム7から送信された位置データ信号及び方向指示器検出部4から送信された方向指示器情報に基づいて、自車両Mの方向指示器の作動状態がON状態であるか、OFF状態であるかを判定する。方向指示器の作動状態がON状態であると判定した場合には、ステップ4の右折時支援処理に移行し、OFF状態であると判定した場合には、ステップ5の直進時支援処理に移行し、図6における処理を終了する。
【0047】
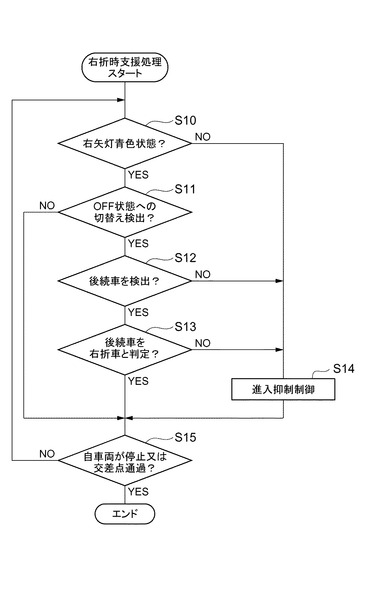
以下、走行支援ECU8が実行する右折時支援処理について図7を参照して説明する。図7は、本実施形態に係る走行支援ECU8で実行される右折時支援処理を示すフローチャートである。
【0048】
まず、走行支援ECU8は、路車間通信部2から送信された信号機情報に基づいて、右折矢灯付き信号機における右折矢灯Srが青色状態であるか否かを判定する(S10)。右折矢灯Srが青色状態であると判定した場合には、ステップ11に進み、右折矢灯Srが青色状態ではないと判定した場合には、ステップ14に進む。
【0049】
ステップ11では、走行支援ECU8は、方向指示器検出部4から送信された方向指示器情報に基づいて、方向指示器のOFF状態への切換えを検出したか否かを判定する。OFF状態への切換えを検出したと判定した場合には、ステップ12に進み、OFF状態への切換えを検出していないと判定した場合には、ステップ15へ進む。
【0050】
ステップ12では、走行支援ECU8は、レーダセンサ6から送信された他車両検出信号に基づいて、後続車Nを検出したか否かを判定する。後続車Nを検出したと判定した場合には、ステップ13に進み、後続車Nを検出しないと判定した場合には、ステップ14に進む。
【0051】
ステップ13では、走行支援ECU8は、車々間通信部3から送信された他車両情報に基づいて、検出した後続車Nの右側方向指示器の作動状態がON状態であるか否かを判定する。後続車Nの右側方向指示器の作動状態がON状態であると判定した場合には、ステップ15に進み、後続車Nの右側方向指示器の作動状態がON状態ではないと判定した場合には、ステップ14に進む。
【0052】
ステップ14では、走行支援ECU8は、進入抑制制御を実行する。すなわち、走行支援ECU8は、走行支援出力部9に制御信号を送信して、運転者に対して警報を発すると共に、自車両Mに対して強制的に車両制動を行い、ステップ15に進む。
【0053】
ステップ15では、走行支援ECU8は、車速検出部5から送信された車速信号及びナビゲーションシステム7から送信された位置データ信号に基づいて、自車両が停止又は交差点を通過したか否かを判定する。自車両が停止又は交差点を通過したと判定した場合には、処理を終了し、自車両が停止又は交差点を通過してないと判定した場合には、ステップ10に戻り制御処理を繰り返す。
【0054】
このような制御処理によれば、図2に示すように、自車両Mが交差点に近づく途中で方向指示器のOFF状態への切換えを行った場合には、進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0055】
また、図3に示すように、自車両Mが交差点に近づく途中で方向指示器のOFF状態への切換えを行い、かつ、右側方向指示器がON状態である後続車Nが存在する場合には、進入抑制制御を実行しない。これにより、自車両Mの強制制動が回避されるため、後続車Nとの接触の慮を低減することができる。
【0056】
また、自車両Mが交差点に近づく途中で方向指示器のOFF状態への切換えを行い、かつ、右側方向指示器がOFF状態である後続車Nが存在する場合には、進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0057】
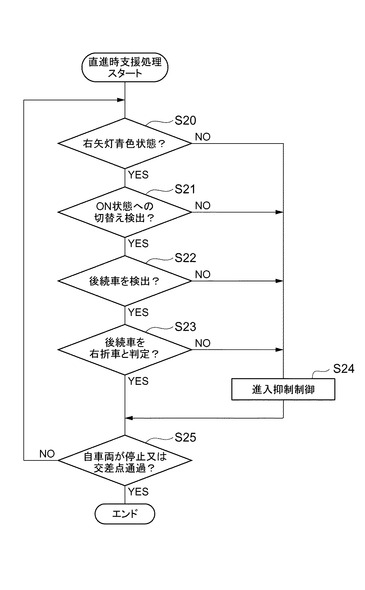
次に、走行支援ECU8が実行する直進時支援処理について図8を参照して説明する。図8は、本実施形態に係る走行支援ECU8で実行される直進時支援処理を示すフローチャートである。
【0058】
まず、走行支援ECU8は、路車間通信部2から送信された信号機情報に基づいて、右折矢灯付き信号機における右折矢灯Srが青色状態であるか否かを判定する(S20)。右折矢灯Srが青色状態であると判定した場合には、ステップ21に進み、右折矢灯Srが青色状態ではないと判定した場合には、ステップ24に進む。
【0059】
ステップ21では、走行支援ECU8は、方向指示器検出部4から送信された方向指示器情報に基づいて、方向指示器のON状態への切換えを検出したか否かを判定する。ON状態への切換えを検出したと判定した場合には、ステップ22に進み、ON状態への切換えを検出していないと判定した場合には、ステップ25へ進む。
【0060】
ステップ22では、走行支援ECU8は、レーダセンサ6から送信された他車両検出信号に基づいて、後続車Nを検出したか否かを判定する。後続車Nを検出したと判定した場合には、ステップ23に進み、後続車Nを検出しないと判定した場合には、ステップ24に進む。
【0061】
ステップ23では、走行支援ECU8は、車々間通信部3から送信された他車両情報に基づいて、検出した後続車Nの右側方向指示器の作動状態がON状態であるか否かを判定する。後続車Nの右側方向指示器の作動状態がON状態であると判定した場合には、ステップ25に進み、後続車Nの右側方向指示器の作動状態がON状態ではないと判定した場合には、ステップ24に進む。
【0062】
ステップ24では、走行支援ECU8は、進入抑制制御を実行する。すなわち、走行支援ECU8は、走行支援出力部9に制御信号を送信して、運転者に対して警報を発すると共に、自車両Mに対して強制的に車両制動を行い、ステップ25に進む。
【0063】
ステップ25では、走行支援ECU8は、車速検出部5から送信された車速信号及びナビゲーションシステム7から送信された位置データ信号に基づいて、自車両が停止又は交差点を通過したか否かを判定する。自車両が停止又は交差点を通過したと判定した場合には、処理を終了し、自車両が停止又は交差点を通過してないと判定した場合には、ステップ20に戻り制御処理を繰り返す。
【0064】
このような制御処理によれば、図4に示すように、自車両Mが交差点に近づく途中で方向指示器のON状態への切換えを行った場合には進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0065】
また、図5に示すように、自車両Mが交差点に近づく途中で方向指示器のON状態への切換えを行い、かつ、右側方向指示器がON状態である後続車Nが存在する場合には、進入抑制制御を実行しない。これにより、自車両Mの強制制動が回避されるため、後続車Nとの接触の慮を低減することができる。
【0066】
また、自車両Mが交差点に近づく途中で方向指示器のON状態への切換えを行い、かつ、右側方向指示器がOFF状態である後続車Nが存在する場合には、進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0067】
以上、本発明をその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。上記実施形態においては、信号機として右折矢灯付き信号機を用いたが、左折矢灯付き信号機においても本発明を適用することができる。左折矢灯付き信号機における実施形態としては、上記実施形態における「右」との記載を「左」との記載に置き換えるものとする。
【0068】
また、上記実施形態において、方向指示器がON状態である後続車が存在する場合に、進入抑制制御を実行しないと判断しているが、後続車の方向指示器のON状態/OFF状態に係らず、後続車が存在する場合に、進入抑制制御を実行しないと判定してもよい。
【図面の簡単な説明】
【0069】
【図1】本発明の実施形態に係る走行支援装置を示すブロック構成図である。
【図2】交差点に近づく途中で方向指示器がOFF状態へ切換えられ、かつ、後続車が存在しない場合の説明図である。
【図3】交差点に近づく途中で方向指示器がOFF状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。
【図4】交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、後続車が存在しない場合における走行支援装置の動作を説明するための概略平面図である。
【図5】交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。
【図6】走行支援ECUで実行される制御処理を示すフローチャートである。
【図7】走行支援ECUで実行される直進時支援処理を示すフローチャートである。
【図8】走行支援ECUで実行される右折時支援処理を示すフローチャートである。
【符号の説明】
【0070】
1…走行支援装置、2…路車間通信部、3…車々間通信部、4…方向指示器検出部、5…車速検出部、6…レーダセンサ、7…ナビゲーションシステム、8…走行支援ECU(後続車判定手段、後続車方向指示器判定手段、切換え検出手段)、9…走行支援出力部。
【技術分野】
【0001】
本発明は、走行支援装置に関する。
【背景技術】
【0002】
従来、交差点における車両の安全性を高めるために様々な技術が提案されている。たとえば、特許文献1においては、自車両が交差点を通過するときの信号機の点灯状態を予測し、予測した信号機点灯状態が黄色または赤色である場合に、運転者に対する警報や自車両に対する強制制動を行う信号情報提供装置が開示されている。また、特許文献1に開示された信号情報提供装置は、自車両の方向指示器がON状態である場合に、警報や強制制動を行わないことで、無用な信号情報の提供を回避している。
【特許文献1】特開2002−373396号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記特許文献1に記載の従来技術では、自車両が交差点に進入する直前に、運転者が方向指示器をON状態からOFF状態へ切換えた場合、その直後に強制制動が行われる。このとき、自車両の後方を走行する後続車が存在すると、自車両と後続車との接触の慮が高まる。
【0004】
また、自車両が交差点に進入する直前に、運転者が方向指示器を意図的にOFF状態からON状態へ切換えた場合、警報や強制制動を解除して交差点への進入が可能となり、交差点内における他車両や歩行者等との接触の慮が高まる。
【0005】
本発明は、このような課題を解決するために成されたものであり、交差点内外における接触の慮を低減することが可能な走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、交差点の信号機情報を取得し、取得した信号機情報に基づいて自車両が交差点を通過する際の信号機状態を予測し、予測した信号機状態が黄色状態又は赤色状態である場合に、自車両の交差点への進入を抑制する進入抑制制御を実行し、自車両の方向指示器の作動状態がON状態である場合に、進入抑制制御を実行しない走行支援装置において、自車両の後方を走行する後続車が存在するか否かを判定する後続車判定手段を備え、方向指示器の作動状態及び後続車判定手段による判定結果に基づいて、進入抑制制御を実行するか否かを判断することを特徴とする。
【0007】
このような走行支援装置によれば、交差点の信号機情報に基づいて自車両の交差点への進入を抑制する進入抑制制御を実行し、自車両の方向指示器の作動状態がON状態である場合に、進入抑制制御を実行しない走行支援装置において、後続車の有無に応じて進入抑制制御を実行するか否かを判断することができる。これにより、進入抑制制御を実行した場合には、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。また、進入抑制制御を実行しなかった場合には、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。なお、「進入抑制制御」とは、例えば停止線を越えて、交差点内に自車両が進入しようとすることを抑制しようとする制御であり、制動装置を用いた減速制御、内燃機関を用いた減速制御、運転者に減速を促すための警報制御、運転者に信号情報を提供する報知制御等を含んでいる。
【0008】
また、方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、切換え検出手段によってOFF状態への切換えが検出され、後続車判定手段によって後続車が存在すると判定された場合に、進入抑制制御を実行しないことが好ましい。これにより、後続車が存在すると判定され、方向指示器の作動状態がOFF状態である場合であっても、進入抑制制御を実行しないため、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。
【0009】
さらに、後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段を更に備え、後続車方向指示器判定手段によって後続車の方向指示器の作動状態がON状態であると判定された場合にのみ、進入抑制制御を実行しないことが好ましい。ここで、後続車の方向指示器の作動状態がOFF状態である場合、この後続車は交差点を直進するものと推定され、信号機状態(黄色状態/赤色状態)に応じて減速することとなり、前方の自車両と不意に接近する可能性は低い。このとき、走行支援装置によって進入抑制制御を実行しても、自車両の急制動による後続車との接触の慮は低いため、後続車との接触の慮を低減しつつ、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。
【0010】
また、方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、切換え検出手段によってON状態への切換えが検出され、後続車判定手段によって後続車が存在しないと判定された場合に、進入抑制制御を実行することが好ましい。これにより、運転者が方向指示器を意図的にOFF状態からON状態に切換えた場合であっても、後続車が存在しないと判定された場合には、進入抑制制御を実行して自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することが可能となる。また、後続車が存在しないと判定された場合に、進入抑制制御を実行するため、自車両と後続車との接触する慮がない。
【0011】
また、方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段と、後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段とを更に備え、切換え検出手段によってON状態への切換えが検出され、後続車方向指示器判定手段によって後続車の方向指示器の作動状態がOFF状態であると判定された場合に、進入抑制制御を実行することが好ましい。これにより、運転者が方向指示器を意図的にOFF状態からON状態に切換えた場合であっても、後続車の方向指示器がOFF状態であると判定された場合には、進入抑制制御を実行して自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することが可能となる。また、後続車の方向指示器がOFF状態であると判定された場合には、後続車は信号機状態(黄色状態、赤色状態)に応じて減速するため、進入抑制制御を実行しても、前方の自車両と不意に接近する可能性は低く、後続車による接触の慮が低減される。
【発明の効果】
【0012】
本発明の走行支援装置によれば、交差点内外における接触の慮を低減することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明における実施形態について図面を参照して説明する。なお、図面の説明において、同一または相当要素には同一の符号を付し、重複する説明は省略する。また、本実施形態においては、右折矢灯付き信号機を備えた交差点に自車両が進入する場合について説明する。
【0014】
本実施形態に係る走行支援装置1は、車両に搭載され、車両進行方向の直近の信号機の表示状態(信号機状態)に基づいて走行を支援するものである。この走行支援装置1は、自車両の交差点通過時に予測される表示状態が黄色状態又は赤色状態である場合に、交差点への進入を抑制する進入抑制制御を行い、自車両の方向指示器がON状態である場合に、進入抑制制御を中止するものである。
【0015】
図1は、本発明の実施形態に係る走行支援装置を示すブロック構成図である。図1に示すように、走行支援装置1は、装置全体の制御を司る走行支援ECU8を備えている。走行支援ECU8には、路車間通信部2、車々間通信部3、方向指示器検出器4、車速検出部5、レーダセンサ6、ナビゲーションシステム7、及び走行支援出力部9が電気的に接続されている。
【0016】
路車間通信部2は、道路に設置される光ビーコンなどの路側通信機と通信を行い、車両進行方向の直近の信号機の表示状態などの信号機情報を取得する。路車間通信部2は、取得した信号機情報を走行支援ECU8に送信する。車々間通信部3は、自車両と他車両との通信を行い、他車両の現在位置や方向指示器の作動状態などの他車両情報を取得する。車々間通信部3は、取得した他車両情報を走行支援ECU8に送信する。
【0017】
方向指示器検出部4は、運転者による方向指示器の操作を検知することにより、方向指示器の作動状態がON状態であるかOFF状態であるかを検出する。方向指示器検出部4は、検出した方向指示器の作動状態を方向指示情報として走行支援ECU8に送信する。
【0018】
車速検出部5は、車輪に設けられ、車輪の回転を検出する車輪速センサを備えている。車速検出部5は、車輪速センサが検出した車輪の回転に基づいて、自車両の車速を算出する。車速検出部5は、算出した車速を車速信号として走行支援ECU8に送信する。
【0019】
レーダセンサ6は、ミリ波信号を自車両周囲に送信し、その反射波を受信することにより、自車両周囲の他車両(後続車)及び他車両の位置を検出するセンサである。レーダセンサ6は、検出した他車両及び他車両の位置を他車両検出信号として走行支援ECU8に送信する。
【0020】
ナビゲーションシステム7は、GPS(Global Positioning System)を内蔵し、地図データベースを有している。ナビゲーションシステム7は、GPSの検知信号に基づいて地図上における自車両位置を認識すると共に、地図データベースに基づいて自車両周辺の信号機の位置を認識する。ナビゲーションシステム7は、認識した自車両位置及び信号機の位置を位置データ信号として走行支援ECU8に送信する。
【0021】
走行制御ECU8は、演算処理を行うCPU(Central Processing Unit)、記憶部となるROM(Read Only Memory)及びRAM(Random Access Memory)、入力信号回路、出力信号回路、電源回路などにより構成された電子制御ユニットである。
【0022】
走行支援ECU8は、信号機状態に基づいて自車両の交差点進入時における信号機状態を予測し、予測した信号機の表示状態に基づいて、自車両の交差点への進入を抑制する進入抑制制御を実行するか否かを判断する。走行支援ECU8は、進入抑制制御を実行すると判断した場合に走行支援出力部9に制御信号を送信する。なお、「交差点進入時」とは、例えば停止線を越えて、交差点内に自車両が進入する時点である。
【0023】
また、走行支援ECU8は、自車両の後方を走行する後続車が存在するか否かを判定する後続車判定手段として機能する。走行支援ECU8は、レーダセンサ6からの情報に基づいて、後続車が存在するか否かを判定することができる。なお、自車両に隣接する走行レーンにおいて、自車両の後方を走行する車両は、後続車と判定しないものとする。
【0024】
また、走行支援ECU8は、自車両の方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段として機能する。走行支援ECU8は、方向指示器検出部4、車速検出部5、及びナビゲーションシステム7からの情報に基づいて、交差点に近づく途中で、自車両の方向指示器が切換えられたか否かを検出することができる。
【0025】
また、走行支援ECU8は、後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段として機能する。走行支援ECU8は、車々間通信部3からの情報に基づいて、後続車の方向指示器の作動状態を判定することができる。
【0026】
ここで、走行支援ECU8は、自車両の方向指示器の作動状態(ON/OFF状態)及び後続車の有無に応じて進入抑制制御を実行するか否かを判断することができる。走行支援ECU8は、例えば、交差点の停止線の手前20mから50mの間で、方向指示器の切換えを検出し、進入抑制制御を実行するか否かを判断する。なお、この判断を行う位置(交差点の停止線の手前20mから50mの間)は、自車両Mの車速、交差点との距離に基づいて、変更可能である。
【0027】
また、走行支援ECU8では、交差点に近づく途中で自車両の方向指示器のON状態からOFF状態への切換えが検出され、かつ、後続車が存在すると判定された場合には、進入抑制制御を中止することができる。また、走行支援ECU8では、後続車が存在する場合において、後続車の方向指示器がON状態であると判定された場合にのみ、進入抑制制御を中止することができる。すなわち、後続車が存在すると判定された場合であっても、後続車の方向指示器がOFF状態である場合には、進入抑制制御を実行する。
【0028】
また、走行支援ECU8では、交差点に近づく途中で自車両の方向指示器のOFF状態からON状態への切換えが検出され、かつ、後続車が存在しないと判定された場合には、進入抑制制御を実行することができる。
【0029】
また、走行支援ECU8では、交差点に近づく途中で自車両の方向指示器のOFF状態からON状態への切換えが検出され、かつ、方向指示器がOFF状態の後続車が存在すると判定された場合には、進入抑制制御を実行することができる。
【0030】
走行支援出力部9は、車室内に設けた警報装置と車輪毎に設けたブレーキアクチュエータとを備えている。走行支援出力部9は、走行支援ECU8から抑制制御信号を送信された場合に、警報装置により運転者に対して警報を発すると共に、ブレーキアクチュエータにより自車両に対して強制的に車両制動を行う。
【0031】
次に、図2〜図5を参照して、右折矢灯付き信号機を備えた交差点に自車両が進入する場合における走行支援装置の動作を説明する。なお、本実施形態では、右折矢灯付き信号機は、信号機本体Shと右折矢灯Srとを備え、その表示状態のサイクルは、信号機本体Shの青色状態を始めとして、黄色状態、赤色状態、右折矢灯Srの青色状態、信号機本体Shの黄色状態、赤色状態を経て、信号機本体Shの青色状態に戻るサイクルである。
【0032】
図2は、交差点に近づく途中で方向指示器がOFF状態へ切換えられ、かつ、後続車が存在しない場合における走行支援装置の動作を説明するための概略平面図である。図2(a)に示すように、自車両Mは、右側方向指示器をON状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のON状態を検出し、右折矢灯Srの青色状態での右折車の進入と推定する。
【0033】
その後、自車両Mは、図2(b)に示すように、後続車が存在しない状態で、右側方向指示器がOFF状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がOFF状態に切換えられ、かつ、後続車が存在しないと判定し、信号機本体Shの赤色状態での直進車の信号無視進入と推定して、進入抑制制御を実行すると判断する。これにより、後続車が存在しない状態で強制制動が実行され、自車両Mの交差点への進入が抑制される。その結果、交差点内における接触の慮が低減される。
【0034】
なお、自車両Mの直後に後続車が存在しない場合には、後続車が存在しないと判定して、進入抑制制御を実行する。具体的には、自車両Mと後続車との距離、相対速度に基づいて、自車両が強制制動を実行しても、後続車の走行に影響を与えないと判断できる場合には、後続車は存在しないと判定することができ、進入抑制制御を実行すると判断できる。
【0035】
また、後続車が直進車であると判定される場合には、進入抑制制御を実行する。具体的には、後続車の方向指示器のOFF状態を検出し、後続車が直進車であると判定し、進入抑制制御を実行すると判断する。
【0036】
図3は、交差点近づく途中で方向指示器がOFF状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。図3(a)に示すように、自車両Mは、右側方向指示器をON状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のON状態を検出し、右折矢灯Srの青色状態での右折車の進入と推定する。
【0037】
その後、自車両Mは、図3(b)に示すように、右側方向指示器がON状態である後続車Nが存在する状態で、右側方向指示器がOFF状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がOFF状態に切換えられ、かつ、右側方向指示器がON状態である後続車Nが存在すると判定して、進入抑制制御を実行しないと判断する。これにより、右側方向指示器がON状態である後続車が存在する状態での強制制動が回避される。その結果、自車両Mと後続車Nとの接触の慮が低減される。
【0038】
図4は、交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、後続車が存在しない場合における走行支援装置の動作を説明するための概略平面図である。図4(a)に示すように、自車両Mは、右側方向指示器をOFF状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のOFF状態を検出し、信号機本体Shの赤色状態での直進車の信号無視進入と推定する。
【0039】
その後、自車両Mは、図4(b)に示すように、後続車が存在しない状態で、右側方向指示器がON状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がON状態に切換えられ、かつ、後続車が存在しないと判定し、信号機本体Shの赤色状態での直進車の信号無視進入と推定して、進入抑制制御を実行すると判断する。これにより、後続車が存在しない状態で強制制動が実行され、自車両Mの交差点への進入が抑制される。すなわち、交差点へ近づく途中で、運転者が意図的に右側方向指示器をOFF状態からON状態へ切換えて、警報や強制制動を解除して交差点に進入することが抑制される。その結果、交差点内における接触の慮が低減される。
【0040】
なお、後続車が直進車であると判定された場合には、進入抑制制御を実行する。具体的には、後続車の方向指示器のOFF状態を検出し、後続車が直進車であると判定し、進入抑制制御を実行すると判断する。
【0041】
図5は、交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。図5(a)に示すように、自車両Mは、右側方向指示器をOFF状態として交差点に接近している。このとき、走行支援ECU8は、右側方向指示器のOFF状態を検出し、信号機本体Shの赤色状態での直進車の信号無視進入と推定する。
【0042】
その後、自車両Mは、図5(b)に示すように、右側方向指示器がON状態である後続車Nが存在する状態で、自車両Mの右側方向指示器がON状態に切換えられて交差点に接近している。このとき、走行支援ECU8は、交差点に近づく途中で自車両Mの右側方向指示器がON状態に切換えられ、かつ、右側方向指示器がON状態である後続車Nが存在すると判定して、進入抑制制御を実行しないと判断する。これにより、右側方向指示器がON状態である後続車Nが存在する状態での強制制動が回避される。その結果、自車両Mと後続車Nとの接触の慮が低減される。
【0043】
次に、図6〜図8を参照して、走行支援ECU8において実行される制御処理について説明する。図6は、本実施形態に係る走行支援ECU8で実行される制御処理を示すフローチャートである。
【0044】
まず、走行支援ECU8は、路車間通信部2から送信された信号機情報に基づいて、右折矢灯付き信号機を認識する(S1)。また、走行支援ECU8は、車速検出部5から送信された車速信号、ナビゲーションシステム7から送信された位置データ信号、及び路車間通信部2から送信された信号機情報に基づいて、自車両Mの交差点進入時における右折矢灯付き信号機の表示状態を予測する。
【0045】
続いて、走行支援ECU8は、予測した右折矢灯付き信号機の表示状態に基づいて、自車両Mの交差点進入時における信号機本体Shの表示状態が青色状態、黄色状態、赤色状態のいずれの状態であるかを判定する(S2)。信号機本体Shの表示状態が黄色状態又は赤色状態であると判定された場合には、ステップ3に進み、青色状態であると判定された場合には、処理を終了する。
【0046】
ステップ3では、ナビゲーションシステム7から送信された位置データ信号及び方向指示器検出部4から送信された方向指示器情報に基づいて、自車両Mの方向指示器の作動状態がON状態であるか、OFF状態であるかを判定する。方向指示器の作動状態がON状態であると判定した場合には、ステップ4の右折時支援処理に移行し、OFF状態であると判定した場合には、ステップ5の直進時支援処理に移行し、図6における処理を終了する。
【0047】
以下、走行支援ECU8が実行する右折時支援処理について図7を参照して説明する。図7は、本実施形態に係る走行支援ECU8で実行される右折時支援処理を示すフローチャートである。
【0048】
まず、走行支援ECU8は、路車間通信部2から送信された信号機情報に基づいて、右折矢灯付き信号機における右折矢灯Srが青色状態であるか否かを判定する(S10)。右折矢灯Srが青色状態であると判定した場合には、ステップ11に進み、右折矢灯Srが青色状態ではないと判定した場合には、ステップ14に進む。
【0049】
ステップ11では、走行支援ECU8は、方向指示器検出部4から送信された方向指示器情報に基づいて、方向指示器のOFF状態への切換えを検出したか否かを判定する。OFF状態への切換えを検出したと判定した場合には、ステップ12に進み、OFF状態への切換えを検出していないと判定した場合には、ステップ15へ進む。
【0050】
ステップ12では、走行支援ECU8は、レーダセンサ6から送信された他車両検出信号に基づいて、後続車Nを検出したか否かを判定する。後続車Nを検出したと判定した場合には、ステップ13に進み、後続車Nを検出しないと判定した場合には、ステップ14に進む。
【0051】
ステップ13では、走行支援ECU8は、車々間通信部3から送信された他車両情報に基づいて、検出した後続車Nの右側方向指示器の作動状態がON状態であるか否かを判定する。後続車Nの右側方向指示器の作動状態がON状態であると判定した場合には、ステップ15に進み、後続車Nの右側方向指示器の作動状態がON状態ではないと判定した場合には、ステップ14に進む。
【0052】
ステップ14では、走行支援ECU8は、進入抑制制御を実行する。すなわち、走行支援ECU8は、走行支援出力部9に制御信号を送信して、運転者に対して警報を発すると共に、自車両Mに対して強制的に車両制動を行い、ステップ15に進む。
【0053】
ステップ15では、走行支援ECU8は、車速検出部5から送信された車速信号及びナビゲーションシステム7から送信された位置データ信号に基づいて、自車両が停止又は交差点を通過したか否かを判定する。自車両が停止又は交差点を通過したと判定した場合には、処理を終了し、自車両が停止又は交差点を通過してないと判定した場合には、ステップ10に戻り制御処理を繰り返す。
【0054】
このような制御処理によれば、図2に示すように、自車両Mが交差点に近づく途中で方向指示器のOFF状態への切換えを行った場合には、進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0055】
また、図3に示すように、自車両Mが交差点に近づく途中で方向指示器のOFF状態への切換えを行い、かつ、右側方向指示器がON状態である後続車Nが存在する場合には、進入抑制制御を実行しない。これにより、自車両Mの強制制動が回避されるため、後続車Nとの接触の慮を低減することができる。
【0056】
また、自車両Mが交差点に近づく途中で方向指示器のOFF状態への切換えを行い、かつ、右側方向指示器がOFF状態である後続車Nが存在する場合には、進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0057】
次に、走行支援ECU8が実行する直進時支援処理について図8を参照して説明する。図8は、本実施形態に係る走行支援ECU8で実行される直進時支援処理を示すフローチャートである。
【0058】
まず、走行支援ECU8は、路車間通信部2から送信された信号機情報に基づいて、右折矢灯付き信号機における右折矢灯Srが青色状態であるか否かを判定する(S20)。右折矢灯Srが青色状態であると判定した場合には、ステップ21に進み、右折矢灯Srが青色状態ではないと判定した場合には、ステップ24に進む。
【0059】
ステップ21では、走行支援ECU8は、方向指示器検出部4から送信された方向指示器情報に基づいて、方向指示器のON状態への切換えを検出したか否かを判定する。ON状態への切換えを検出したと判定した場合には、ステップ22に進み、ON状態への切換えを検出していないと判定した場合には、ステップ25へ進む。
【0060】
ステップ22では、走行支援ECU8は、レーダセンサ6から送信された他車両検出信号に基づいて、後続車Nを検出したか否かを判定する。後続車Nを検出したと判定した場合には、ステップ23に進み、後続車Nを検出しないと判定した場合には、ステップ24に進む。
【0061】
ステップ23では、走行支援ECU8は、車々間通信部3から送信された他車両情報に基づいて、検出した後続車Nの右側方向指示器の作動状態がON状態であるか否かを判定する。後続車Nの右側方向指示器の作動状態がON状態であると判定した場合には、ステップ25に進み、後続車Nの右側方向指示器の作動状態がON状態ではないと判定した場合には、ステップ24に進む。
【0062】
ステップ24では、走行支援ECU8は、進入抑制制御を実行する。すなわち、走行支援ECU8は、走行支援出力部9に制御信号を送信して、運転者に対して警報を発すると共に、自車両Mに対して強制的に車両制動を行い、ステップ25に進む。
【0063】
ステップ25では、走行支援ECU8は、車速検出部5から送信された車速信号及びナビゲーションシステム7から送信された位置データ信号に基づいて、自車両が停止又は交差点を通過したか否かを判定する。自車両が停止又は交差点を通過したと判定した場合には、処理を終了し、自車両が停止又は交差点を通過してないと判定した場合には、ステップ20に戻り制御処理を繰り返す。
【0064】
このような制御処理によれば、図4に示すように、自車両Mが交差点に近づく途中で方向指示器のON状態への切換えを行った場合には進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0065】
また、図5に示すように、自車両Mが交差点に近づく途中で方向指示器のON状態への切換えを行い、かつ、右側方向指示器がON状態である後続車Nが存在する場合には、進入抑制制御を実行しない。これにより、自車両Mの強制制動が回避されるため、後続車Nとの接触の慮を低減することができる。
【0066】
また、自車両Mが交差点に近づく途中で方向指示器のON状態への切換えを行い、かつ、右側方向指示器がOFF状態である後続車Nが存在する場合には、進入抑制制御を実行する。これにより、自車両の交差点への進入を防止することができ、交差点内における接触の慮を低減することができる。
【0067】
以上、本発明をその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。上記実施形態においては、信号機として右折矢灯付き信号機を用いたが、左折矢灯付き信号機においても本発明を適用することができる。左折矢灯付き信号機における実施形態としては、上記実施形態における「右」との記載を「左」との記載に置き換えるものとする。
【0068】
また、上記実施形態において、方向指示器がON状態である後続車が存在する場合に、進入抑制制御を実行しないと判断しているが、後続車の方向指示器のON状態/OFF状態に係らず、後続車が存在する場合に、進入抑制制御を実行しないと判定してもよい。
【図面の簡単な説明】
【0069】
【図1】本発明の実施形態に係る走行支援装置を示すブロック構成図である。
【図2】交差点に近づく途中で方向指示器がOFF状態へ切換えられ、かつ、後続車が存在しない場合の説明図である。
【図3】交差点に近づく途中で方向指示器がOFF状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。
【図4】交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、後続車が存在しない場合における走行支援装置の動作を説明するための概略平面図である。
【図5】交差点に近づく途中で方向指示器がON状態へ切換えられ、かつ、右側方向指示器がON状態である後続車が存在する場合における走行支援装置の動作を説明するための概略平面図である。
【図6】走行支援ECUで実行される制御処理を示すフローチャートである。
【図7】走行支援ECUで実行される直進時支援処理を示すフローチャートである。
【図8】走行支援ECUで実行される右折時支援処理を示すフローチャートである。
【符号の説明】
【0070】
1…走行支援装置、2…路車間通信部、3…車々間通信部、4…方向指示器検出部、5…車速検出部、6…レーダセンサ、7…ナビゲーションシステム、8…走行支援ECU(後続車判定手段、後続車方向指示器判定手段、切換え検出手段)、9…走行支援出力部。
【特許請求の範囲】
【請求項1】
交差点の信号機情報を取得し、取得した前記信号機情報に基づいて自車両が前記交差点を通過する際の信号機状態を予測し、予測した信号機状態が黄色状態又は赤色状態である場合に、前記自車両の前記交差点への進入を抑制する進入抑制制御を実行し、前記自車両の方向指示器の作動状態がON状態である場合に、前記進入抑制制御を実行しない走行支援装置において、
前記自車両の後方を走行する後続車が存在するか否かを判定する後続車判定手段を備え、
前記方向指示器の作動状態及び前記後続車判定手段による判定結果に基づいて、前記進入抑制制御を実行するか否かを判断することを特徴とする走行支援装置。
【請求項2】
前記方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、
前記切換え検出手段によって前記OFF状態への切換えが検出され、前記後続車判定手段によって前記後続車が存在すると判定された場合に、前記進入抑制制御を実行しないことを特徴とする請求項1記載の走行支援装置。
【請求項3】
前記後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段を更に備え、
前記後続車方向指示器判定手段によって前記後続車の方向指示器の作動状態がON状態であると判定された場合にのみ、前記進入抑制制御を実行しないことを特徴とする請求項2記載の走行支援装置。
【請求項4】
前記方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、
前記切換え検出手段によって前記ON状態への切換えが検出され、前記後続車判定手段によって前記後続車が存在しないと判定された場合に、前記進入抑制制御を実行することを特徴とする請求項1記載の走行支援装置。
【請求項5】
前記方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段と、
前記後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段とを更に備え、
前記切換え検出手段によって前記ON状態への切換えが検出され、前記後続車方向指示器判定手段によって前記後続車の方向指示器の作動状態がOFF状態であると判定された場合に、前記進入抑制制御を実行することを特徴とする請求項1記載の走行支援装置。
【請求項1】
交差点の信号機情報を取得し、取得した前記信号機情報に基づいて自車両が前記交差点を通過する際の信号機状態を予測し、予測した信号機状態が黄色状態又は赤色状態である場合に、前記自車両の前記交差点への進入を抑制する進入抑制制御を実行し、前記自車両の方向指示器の作動状態がON状態である場合に、前記進入抑制制御を実行しない走行支援装置において、
前記自車両の後方を走行する後続車が存在するか否かを判定する後続車判定手段を備え、
前記方向指示器の作動状態及び前記後続車判定手段による判定結果に基づいて、前記進入抑制制御を実行するか否かを判断することを特徴とする走行支援装置。
【請求項2】
前記方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、
前記切換え検出手段によって前記OFF状態への切換えが検出され、前記後続車判定手段によって前記後続車が存在すると判定された場合に、前記進入抑制制御を実行しないことを特徴とする請求項1記載の走行支援装置。
【請求項3】
前記後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段を更に備え、
前記後続車方向指示器判定手段によって前記後続車の方向指示器の作動状態がON状態であると判定された場合にのみ、前記進入抑制制御を実行しないことを特徴とする請求項2記載の走行支援装置。
【請求項4】
前記方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段を備え、
前記切換え検出手段によって前記ON状態への切換えが検出され、前記後続車判定手段によって前記後続車が存在しないと判定された場合に、前記進入抑制制御を実行することを特徴とする請求項1記載の走行支援装置。
【請求項5】
前記方向指示器のON状態又はOFF状態への切換えを検出する切換え検出手段と、
前記後続車の方向指示器の作動状態がON状態であるかOFF状態であるかを判定する後続車方向指示器判定手段とを更に備え、
前記切換え検出手段によって前記ON状態への切換えが検出され、前記後続車方向指示器判定手段によって前記後続車の方向指示器の作動状態がOFF状態であると判定された場合に、前記進入抑制制御を実行することを特徴とする請求項1記載の走行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−67314(P2009−67314A)
【公開日】平成21年4月2日(2009.4.2)
【国際特許分類】
【出願番号】特願2007−239886(P2007−239886)
【出願日】平成19年9月14日(2007.9.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年4月2日(2009.4.2)
【国際特許分類】
【出願日】平成19年9月14日(2007.9.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]