
走行時間計測装置、計測ライン設定装置、及び、プログラム
【課題】精度良く走行時間を計測できる走行時間計測装置、計測ライン設定装置及びプログラムを提供する。
【解決手段】本発明に係る走行時間計測装置では、垂線設定部は、情報取得部が取得した地図情報が表す地図上において、情報取得手段が取得した経路情報が表す経路上の所定点をユーザの操作に基づいて特定し、特定した所定点を通り経路に垂直な垂線を計測ラインとして設定し、計測部は、自車位置特定部が順次特定する自車の位置が計測ラインを横切ったときを計測の基準として走行時間を計測する。
【解決手段】本発明に係る走行時間計測装置では、垂線設定部は、情報取得部が取得した地図情報が表す地図上において、情報取得手段が取得した経路情報が表す経路上の所定点をユーザの操作に基づいて特定し、特定した所定点を通り経路に垂直な垂線を計測ラインとして設定し、計測部は、自車位置特定部が順次特定する自車の位置が計測ラインを横切ったときを計測の基準として走行時間を計測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行時間計測装置、計測ライン設定装置、及び、プログラムに関する。
【背景技術】
【0002】
この種の装置として、例えば、特許文献1には、車両(レーシングカー)の位置情報に基づいて、車両が任意の位置A〜Dに至ったときの走行時間(例えばコースの1周のラップタイム)を計測する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−62321号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の技術では、車両がコースの例えば端を走った場合等において、車両が位置A〜Dを通過しない場合、車両が位置A〜Dに至ったとは判断されない場合があるので、走行時間を正確に計測できなかった。
【0005】
本発明は、このような点に鑑みてなされたものであり、その目的とするところは、精度良く車両の走行時間を計測できる走行時間計測装置及び計測ライン設定装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の第1の観点に係る走行時間計測装置は、
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を計測ラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記計測ラインを横切ったときを計測の基準として前記走行時間を計測する計測手段と、
を備える。
【0007】
また、本発明の第2の観点に係る走行時間計測装置は、
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上のスタート点とゴール点とを前記所定経路のスタートとゴールとを指定するユーザの操作に基づいて特定し、特定した前記スタート点を通り前記経路に垂直な垂線をスタートラインとして設定するとともに、特定した前記ゴール点を通り前記経路に垂直な垂線をゴールラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記スタートラインから前記ゴールラインに達したときの時間間隔を前記走行時間として計測する計測手段と、
を備える。
【0008】
また、本発明の第3の観点に係る計測ライン設定装置は、
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定手段と、
を備える。
【0009】
また、本発明の第4の観点に係るプログラムは、
コンピュータを、
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得部と、
前記情報取得部が取得した前記地図情報が表す前記地図上において、前記情報取得部が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定部と、
として機能させる。
【発明の効果】
【0010】
本発明によれば、精度良く車両の走行時間を計測できる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態の一例に係る走行時間計測装置の構成を示したブロック図である。
【図2】本発明の実施形態の一例に係る走行時間計測装置のハードウェア構成を示したブロック図である。
【図3】図2のハードウェア構成を有する走行時間計測装置の外観図である。
【図4】本発明の実施形態の一例に係る走行時間計測装置が行う計測ライン設定処理(1)のフローチャートである。
【図5】(a)乃至(d)は、本発明の実施形態の一例に係る走行時間計測装置が計測ライン設定処理(1)において表示する操作画面の例である。
【図6】本発明の実施形態の一例に係る走行時間計測装置が所定点を特定するときの例を説明するための説明図である。
【図7】本発明の実施形態の一例に係る走行時間計測装置が計測ラインを設定するときの例を説明するための説明図である。
【図8】本発明の実施形態の一例に係る走行時間計測装置がスタートラインとゴールラインとを設定した後のスタートラインからゴールラインまでの走行経路を示す表示画面の図である。
【図9】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(1)のフローチャートである。
【図10】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(1)における、車両とスタートラインとの関係を示し、計測開始のタイミングを示す図である。
【図11】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(1)における、車両とゴールラインとの関係を示し、計測終了のタイミングを示す図である。
【図12】本発明の実施形態の一例に係る走行時間計測装置が行う計測ライン設定処理(2)のフローチャートである。
【図13】(a)乃至(b)は、本発明の実施形態の一例に係る走行時間計測装置が計測ライン設定処理(2)において表示する操作画面の例である。
【図14】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(2)のフローチャートである。
【図15】本発明の実施形態の一例に係る走行時間計測装置が表示する走行時間の表示画面の一例である。
【発明を実施するための形態】
【0012】
本発明に係る一実施形態について図面を参照して説明する。なお、本発明は下記の実施形態及び図面によって限定されるものではない。下記の実施形態及び図面に変更(構成要素の削除も含む)を加えることができるのはもちろんである。また、以下の説明では、本発明の理解を容易にするために、重要でない公知の技術的事項の説明を適宜省略する。
【0013】
本実施形態に係る走行時間計測装置100の構成を図1及び図2を参照して説明する。走行時間計測装置100は、自動車、自動二輪車等の車両1に搭載される。
【0014】
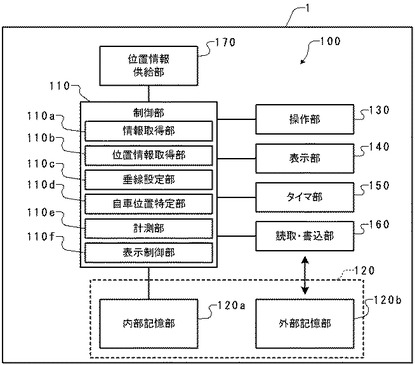
走行時間計測装置100は、例えば、カーナビゲーションシステムによって構成される。走行時間計測装置100は、制御部110と、内部記憶部120aと、操作部130と、表示部140と、タイマ部150と、読取・書込部160と、位置情報供給部170と、を備える。
【0015】
制御部110は、走行時間計測装置100全体を制御する。また、制御部110は、データ取得部と、位置情報取得部110bと、垂線設定部110cと、自車位置特定部110dと、計測部110eと、表示制御部110fと、を備える。これらは、内部記憶部120aに記録されたデータ、外部記憶部120bに記録されたデータ、位置情報供給部170から供給される位置情報等を適宜取得、使用して、走行時間計測装置100全体を制御するとともに後述の処理を行う。
【0016】
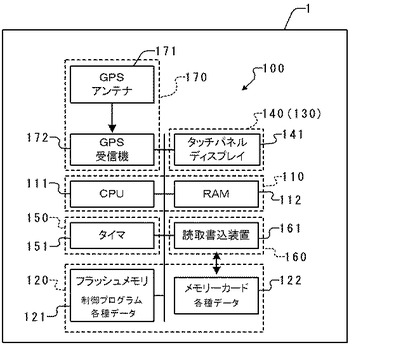
制御部110は、例えば、CPU111(Central Processing Unit)111と、RAM112(Random Access Memory)112と、を含んで構成される。RAM112は、CPU111のワーキングメモリ等として機能する。RAM112は、CPU111が使用するデータ(制御部110に供給される各データ)、CPU111が生成したデータ(制御部110が各構成要素に供給する各データ)等を適宜一時記憶する。また、RAM112には、制御プログラムがロードされる。CPU111は、RAM112にロードされた制御プログラムに従って、また、RAM112が一時記憶するデータ等に基づいて、制御部110が行う処理(特に、データ取得部と、位置情報取得部110bと、垂線設定部110cと、自車位置特定部110dと、計測部110eと、表示制御部110fとが行う処理)を実際に行う。なお、制御部110の少なくとも一部は、CPU111の他、CPU111が行う処理のうちの少なくとも一部を行う各種専用回路を含んで構成されてもよい。
【0017】
内部記憶部120aは、制御部110が使用するデータ等を記憶する。内部記憶部120aは、制御部110の制御のもと、適宜のタイミングで、記憶しているデータを制御部110に供給する。これによって、制御部110は、適宜のタイミングで、内部記憶部120aからデータを取得する。
【0018】
内部記憶部120aは、例えば、フラッシュメモリ121を含んで構成される。内部記憶部120aには、制御プログラム、各種データ等が記録されている。フラッシュメモリ121に記録された制御プログラムは、RAM112にロードされる。また、フラッシュメモリ121に記録された各種データも、CPU111の制御のもと、適宜のタイミングでRAM112に一時記憶され、CPU111に供給される。これによって、CPU111は、内部記憶部120aから所定のデータを取得する。内部記憶部120aは、例えば、ハードディスク等の他の記憶装置によって構成されてもよい。
【0019】
操作部130は、制御部110(計測位置設定部)の制御のもと、ユーザの操作に基づいた操作信号を制御部110に供給する。また、表示部140は、制御部110(表示制御部110f)の制御のもと、制御部110から供給される表示データに基づいて、この表示データが表す所定の画像を表示する。
【0020】
表示部140と操作部130とは、例えば、タッチパネルディスプレイ141によって構成される。タッチパネルディスプレイ141は、表示部140に当たるディスプレイ部と、操作部130に当たるセンサ部と、からなる。ディスプレイ部は、液晶パネル、EL(Electro-Luminescence)パネル等のディスプレイパネルと、前記ディスプレイパネルを駆動する駆動回路と、によって構成される。駆動回路には、CPU111から表示データが供給される。駆動回路は、この表示データに応じてディスプレイパネルを駆動することによって、ディスプレイパネルに前記の所定の画像を表示する。センサ部は、静電容量式の位置入力装置等によって構成される。ユーザがディスプレイパネルの所定位置を指等で触れると、この指等が接触した位置(例えば、指等が接触している部分の中心位置等をいう。)を示す信号を前記の操作信号として生成し、CPU111に供給する。
【0021】
タイマ部150は、タイマ151等によって構成され、走行時間を計測するために使用される。例えば、タイマ151は、水晶振動子と、発振回路と、を備え、所定周期のクロック信号を生成してCPU111に供給する。CPU111は、このクロック信号の周期に基づいて走行時間を計測する。
【0022】
読取・書込部160は、制御部110の制御のもと、外部記憶部120bにデータを書き込む、又は外部記憶部120bからデータを読み出す。これによって、制御部110は、データを読取・書込部160を介して、外部記憶部120bに書き込む又は外部記憶部120bから取得する。外部記憶部120bは、例えば、マイクロSDカード等のメモリーカード122によって構成され、走行時間計測装置100に取り付けられる。例えば、読取・書込部160は、カードスロット、メディアコントローラ等を備える読取・書込装置161を含んで構成される。カードスロットにメモリーカード122が取り付けられる。CPU111は、メディアコントローラを介してメモリーカード122にデータを書き込む、又はメモリーカード122からデータを読み出す(取得する)。なお、メモリーカード122からCPU111に供給される前記のデータもRAM112に一時記憶される。
【0023】
なお、外部記憶部120bと内部記憶部120aとによって、記憶部120が構成される。記憶部120は、外部記憶部120bのみによって構成されてもよいし、内部記憶部120aのみによって構成されてもよい。また、データ(地図情報、経路情報、後述のカーナビ用地図データ等)、プログラム等は、外部記憶部120b、内部記憶部120aのいずれに記録されても良い。ここでは、プログラム、カーナビ用地図データ等が内部記憶部120aに記録され、所定の経路情報が外部記憶部120bに記録される。
【0024】
位置情報供給部170は、制御部110の制御のもと、車両1(つまり、走行時間計測装置100が搭載された自車)の位置を表す位置情報を生成して制御部110に供給する。位置情報供給部170は、公知の方法で、車両1の位置を特定し、特定した位置を表す前記の位置情報を生成する。
【0025】
例えば、位置情報供給部170は、GPS(Global Positioning System)アンテナ171と、GPS受信機172と、を含んで構成される。GPSアンテナ171は、GPS衛星からの電波を受信する。GPS受信機172は、アンテナで受信した電波に基づいて車両1の位置を示す位置情報を生成し、CPU111に供給する。位置情報供給部170は、他の装置等を含んでもよい。GPSを用いて特定される自車の位置は、前記の他の装置によって補正等がされてもよい。前記の位置は、例えば、緯度及び経度によって表され、前記の位置情報は、例えば、自車の位置の緯度及び経度を示す情報である。
【0026】
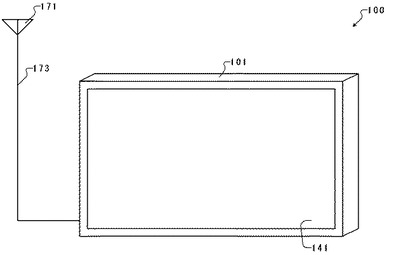
図3に図2に示したハードウェア構成を有する走行時間計測装置100の外観を示す。走行時間計測装置100の筐体101には、GPSアンテナ171及びGPSアンテナ171に繋ぐ配線173以外の各構成装置(要素)が納められている。また、筐体101からは、ディスプレイパネルの画面の表示面が露出する。配線173は、GPSアンテナ171と筐体101内部のGPS受信機172とを接続する配線である。GPSアンテナ171は、例えば、車両1のフロントガラスに設置される。筐体101は、例えば、車両1のダッシュボード上等の運転席前方に設置される。
【0027】
次に、走行時間計測装置100の制御部110が行う処理を説明する。走行時間計測装置100の制御部110は、記憶部120から、地図情報と、経路情報と、を取得する。地図情報は、地図(例えば、日本地図)を表すデータであり、ここでは、例えば、所定の情報(道路、施設、地名、住所等の情報)が適宜付加されたデータである。なお、地図情報は、最低限、緯度経度等の位置情報が示す位置を特定できる平面(このような平面も地図と呼ぶ)を示すデータであればよい。また、経路情報は、地図情報の地図上において、道路等の車両1が走行可能な経路を示したデータであり、例えば、地図上における緯度経度で示される複数の点の集合を示す情報である。つまり、経路情報が表す経路は、ここでは、地図上の点を含み、この点によって表現される。
【0028】
上記経路は、一般道の経路等の、一周できないオープン型の経路(スタートとゴールとが異なる位置にある経路)と、サーキットのコース等の、一周が可能なクローズ型の経路(スタートとゴールとが同じ位置にある経路)と、がある。表示制御部110fは、ユーザに走行経路が、オープン型の経路であるか、クローズ型の経路であるか、の選択を促す画面を表示部140に表示する。ユーザが操作部130を用いて、オープン型の経路を選択した場合には、制御部110は、計測ライン設定処理(1)及び計測処理(1)を行う。また、ユーザが操作部130を用いて、クローズ型の経路を選択した場合には、制御部110は、計測ライン設定処理(2)及び計測処理(2)を行う。前記の選択を促す画面の画像データ等は、内部記憶部120aに記録され、表示制御部110fは、適宜のタイミングで、内部記憶部120aから前記の画像データを取得し、表示データを生成し、表示部140に生成した表示データを供給する。これによって、前記の選択を促す画面が表示部140に表示される。
【0029】
公知のカーナビゲーションシステムにおいて使用されるカーナビ用地図データは、前記の地図情報と、経路情報と、を含むデータである。このため、制御部110は、カーナビ用地図データ(予め内部記憶部120aに記録されているものとする。)に基づいて、前記の各処理を行うことができる。カーナビ用地図データは、例えば、内部記憶部120aに記録されているものとする。また、カーナビ用地図データは、例えば、地図の所定の地域等ごとに分けられて内部記憶部120aに記録され、情報取得部110aは、所定の緯度経度を示す位置情報(又は、住所を示す住所情報)等に基づいて、この位置情報が示す緯度経度等が示す位置を含む地域の地図を表すカーナビ用地図データを内部記憶部120aから適宜読み出すものとする。
【0030】
また、経路情報は、カーナビ用地図データとは別に生成されたデータであってもよい。例えば、車両1が以前に走行した軌跡(経路)を表すデータを経路情報としてもよい。このような経路情報は、適宜の方法によって、予め生成され、記録されるものとする。このような経路情報としては、カーナビ用地図データには通常含まれない、例えば、サーキットのコース等の経路情報がある。このような経路情報は、例えば、外部記憶部120bに記録されており、ユーザの操作部130の操作によって、このような経路情報が選択されると、制御部110は、選択された経路情報を取得して計測ライン設定処理(1)又は計測ライン設定処理(2)を行うものとする。また、下記の処理は、基本的に地図情報が表す地図上での処理になる。
【0031】
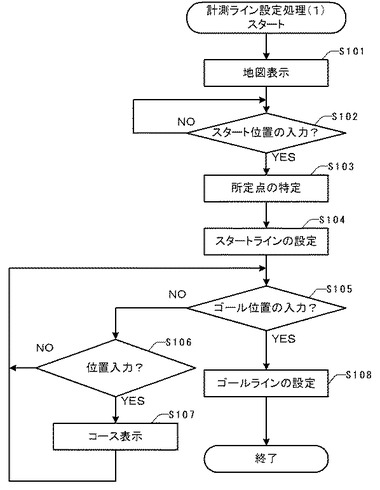
走行時間計測装置100の制御部110が行う計測ライン設定処理(1)を図4等を参照して説明する。この処理は、例えば、ユーザが操作部130を操作して、走行経路の設定モードを選択するとともに、オープン型の経路を選択したことを契機として始まる。この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。この処理によって、走行経路のスタート及びゴールが設定される。また、以下では、各部が取得したデータ(情報)は、適宜、RAM112に保持(一時記録)される。
【0032】
まず、位置情報取得部110bは、現在の位置情報を位置情報供給部170から取得する。情報取得部110aは、位置情報取得部110bが取得した位置情報が示す緯度経度の位置を含む所定の地域のカーナビ用地図データを内部記憶部120aから取得することによって、地図情報及び経路情報を取得する。そして、表示制御部110fは、情報取得部110aが取得したカーナビ用地図データ(地図情報)と位置情報取得部110bが取得した位置情報とに基づいて、表示部140に表示する地図(上記の位置情報が示す緯度経度を中心とした所定の大きさの地図)に、所定の操作領域を表す画像(操作キー)を付加した画像を表す表示データを生成し表示部140に供給し、操作キーが付加された地図画像を表示部140の画面に表示させる(ステップS101)。表示部140に表示される画像を以下では、操作画面という。なお、操作部130を表す画像を示す画像データは、内部記憶部120aに記録されているものとし、表示制御部110fは、適宜この画像データを取得し、取得したこの画像データを用いて、表示部140に操作キーを付加した地図画像の表示データを生成する処理を行う。
【0033】
なお、前記の所定地域、表示部140に表示する地図等は、ユーザの操作による住所の検索等によって指定され、情報取得部110aは、この指定(住所情報)に基づいて、所定の地域のカーナビ用地図データを内部記憶部120aから取得するとともに、表示制御部110fは、表示部140に表示する地図を特定し、特定した地図に基づいて前記の表示データを生成してもよい。また、表示部140に表示する地図の縮尺は、予め設定されるか、ユーザの操作によって指定されているものとする。また、ユーザの操作部130の操作によって経路情報が選択されていた場合には、情報取得部110aは、選択された経路情報を外部記憶部120bから取得するとともに、この経路情報の経路を含む地域のカーナビ用地図データ(特に地図情報)を内部記憶部120aから取得する。表示制御部110fは、経路情報の経路が含まれる所定の地図を含む操作画面の表示データをカーナビ用地図データ等に基づいて生成し、前記の操作画面を表示部140に表示する処理を行う。
【0034】
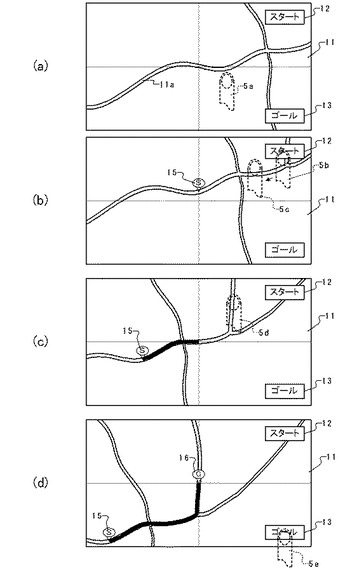
図5(a)に、ステップS101において表示部140が表示する画面を示す。表示制御部110fは、図5(a)に示すように、道路11aが描かれた地図(現在の自車の位置が中心となっている。)11に、「スタート」という操作キー12と、「ゴール」という操作キー13と、が付加された画像を表示部140に表示する。
【0035】
また、ステップS101の処理以降、垂線設定部110cが後述のステップS102でYESと判定するまで、ユーザが操作画面(操作部130)の所望の位置を指で触ると、この触った位置である接触位置(操作画面に表示された地図上での位置)を中心とした地図を表示するように、表示制御部110fは動作する。例えば、ステップS101の処理以降、操作部130は、接触位置に応じた操作信号(この接触位置は、操作画面上の地図をユーザが触れたときの前記地図上の触れた位置であり、この操作信号は操作画面上のユーザが触れた位置を示す信号になる。以下、同じ。)を表示制御部110fに供給する。表示制御部110fは、この操作信号を取得すると、情報取得部110aが取得している前記のカーナビ用地図データに基づいて、取得した操作信号が示す地図上の接触位置を中心とした地図であって表示部140に新たに表示する地図に操作キーを付加した画像を表す表示データを新たに生成し表示部140に供給し、表示部140に新たな操作画面を表示させる。例えば、図5(a)の指5aのように指が所望の位置に接触すると、指の位置(接触位置)を中心とした地図を含む操作画面が表示部140に表示される(図5(b)参照)。
【0036】
表示制御部110fが上記の表示制御を開始すると、垂線設定部110cは、操作部130からスタートを設定する操作(スタート操作)に応じた操作信号が供給されたかを判別する(ステップS102)。ユーザが操作画面の所望の位置を指で触ることを繰り返すことによって、表示画面上で、地図上の前記の所望の位置が操作画面における地図上の中心に移動する。そして、ユーザは、スタート地点としたい位置が操作画面における地図上の略中心に位置したと思った場合に、操作キー12に触れる(図5(b)の指5b参照)。この操作キー12に触れる操作がスタートを設定する操作になり、操作部130は、この操作に応じた操作信号をスタート操作に応じた操作信号として垂線設定部110cに供給する。垂線設定部110cは、スタート操作に応じた操作信号が供給されるまで、ステップS102の処理を繰り返し、スタート操作がユーザによって行われるまで待機する(ステップS102;NO)。
【0037】
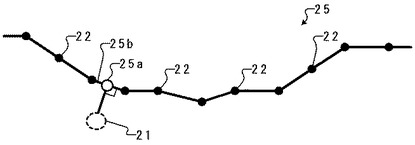
一方、垂線設定部110cは、操作部130からスタート操作に応じた操作信号が供給された場合(ステップS102;YES、図5(b)参照)、情報取得部110aが取得したカーナビ用地図データの経路情報を用いて、前記地図上の中心(つまり、ユーザの操作によって特定された指定点)と所定の関係にある所定点を地図上で特定する。垂線設定部110cは、例えば、経路情報を用いて、経路情報が表す経路を構成する複数の点のうちの隣り合う点同士を結んだ線分(経路を構成する点も含まれる)上にある点であって、地図上の中心(指定点)と所定の関係にある点を所定点として地図上で特定する。垂線設定部110cは、例えば、前記の複数の線分のうち、地図上の中心(指定点)と最短の距離にある線分に対して垂線を下ろし、この垂線と線分との交点(経路を構成する点となる場合もある)を前記の所定点として特定する。なお、位置情報の履歴(適宜記憶部に記録されるものとする)も考慮するため、必ずしも地図上の中心と最短の距離にある線分が採用されるわけではない。前記の線分と前記の指定点とは、一定の関係にあればよい。このような所定点の特定は、所謂マップマッチング等によって行われる。前記の所定の関係とは、このマップマッチングのアルゴリズム等によって規定されるものであり、マップマッチングの種類等によって異なる。
【0038】
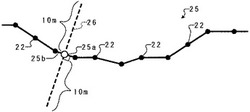
所定点の特定を、図6を参照してより詳細に説明する。経路情報は、経路上の点の位置それぞれを、例えば、緯度経度で示す情報で表すデータである。このため、図6に示すように経路25は、点22の集合で表される。ユーザがスタートとして設定するために触れた位置(つまり、ユーザが操作キー12に触れる前に触れた地図上の位置(地図上で中心になっている位置))が、図6では、接触位置21であるとすると、接触位置21と前記の所定の関係にある点25a(ここでは、接触位置21から隣り合う点22同士を結んだ線分25b(指定点と一定の関係にある線分)に下ろされた垂線との交点である)を前記の所定点(スタート点)として特定する。
【0039】
垂線設定部110cは、所定点を特定すると、この所定点を通り、経路に垂直な垂線をスタートライン(計測ライン)として設定する(ステップS104)。垂線設定部110cは、スタートラインを設定すると、このスタートラインを地図情報が表す地図上で特定できるデータ(スタートライン情報)を生成し、RAM112に保持する。
【0040】
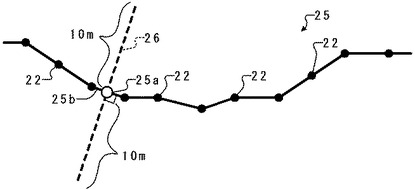
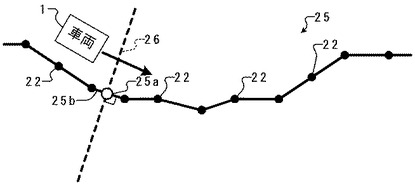
ここで、スタートラインの設定を、図7を参照してより詳細に説明する。垂線設定部110cは、所定点(点25a)を通り前記の線分25bに垂直な垂線(経路に垂直な直線)をスタートライン26として設定する。スタートラインの長さは、例えば、所定点から端部までそれぞれ10mとし、所定点を中点として、20mとする。スタートラインの長さは、適宜の長さを採用できる。
【0041】
垂線設定部110cがスタートラインを設定すると、表示制御部110fは、表示部140に表示している操作画面上に、所定点を指すスタートマーク15を重畳表示する(図5(b)参照)。なお、スタートマーク15の画像データ等は、内部記憶部120aに予め記録されているものとする。垂線設定部110cは、内部記憶部120aから前記の画像データを取得し使用して、操作画面にスタートマーク15を重畳した画像を表す表示データを生成し、表示部140に供給する。これによって、スタートマーク15が表示部140に重畳表示される。
【0042】
垂線設定部110cは、スタートラインを設定すると、操作部130からゴールを設定する操作(ゴール操作)に応じた操作信号が供給されたかを判別する(ステップS105)。ユーザは、ゴール地点としたい位置が操作画面における地図上の中心に位置したと思った場合に、操作キー13に触れる(図5(d)の指5e参照)。この操作キー13に触れる操作がゴールを設定する操作になり、操作部130は、この操作に応じた操作信号をゴール操作に応じた操作信号として垂線設定部110cに供給する。垂線設定部110cは、ゴール操作に応じた操作信号が供給されていないと判別した場合(ステップS105;NO)、操作部130から操作画面への新たな接触操作に応じた操作信号が供給されたか(新たな位置入力があったか)を判別する(ステップS106)。例えば、垂線設定部110cは、直近に供給された操作信号が示す接触位置とは異なる又は前記の所定点の位置とは異なる接触位置を示す操作信号が供給されたかを判別する。表示制御部110fは、接触位置を示す操作信号が供給されていないと判別した場合(ステップS106;NO)、再びステップS105の処理を行う。なお、垂線設定部110cは、後述のゴールラインがスタートラインと重ならないように、新たな位置入力があるまで、ステップS105で、必ずNOと判別するとよい。
【0043】
一方、垂線設定部110cに前記の接触位置を示す操作信号が供給された場合(ステップS106;YES、図5(b)参照)、表示制御部110fは、コース表示を行う(ステップS107)。例えば、情報取得部110aが取得したカーナビ用地図データの経路情報を用いて、垂線設定部110cは、経路情報が表す経路上の、前記の操作信号によって示される地図上の接触位置と所定の関係にある所定点を地図上で特定する。この特定は、ステップS103の処理と同様であるので説明を省略する(地図上で中心になっている位置が接触位置に変更される。)。その後、表示制御部110fは、垂線設定部110cが特定した所定点(地図上での位置)を中心とした地図を表示するように動作する(図5(b)の指5c、及び、図5(c)参照)。この処理は、上記におけるステップS101の処理と略同様の処理(接触位置が所定点に変更される。)であるので説明を省略する。さらに、表示制御部110fは、この表示動作を行う際に、前記スタート点又は前回のステップS106の処理で特定した所定点から今回の処理で特定した所定点までを経路上でなぞった太線(経路が含む点同士を結んだ前記の線分をなぞった太線)を地図上に重畳させて表示する。なお、太線についてのデータ等は、内部記憶部120aに予め記録されているものとする。表示制御部110fは、内部記憶部120aから前記のデータを取得し使用して、操作画面に太線を重畳した画像を表す表示データを生成し、表示部140に供給する。これによって、太線が表示部140に重畳表示される(図5(c)参照)。この太線によって、走行経路(コース)が表示部140に表示される。
【0044】
垂線設定部110c及び表示制御部110fは、ステップS105乃至ステップS107の処理において、ユーザによりゴール操作がされるまで、コース設定(走行経路の設定)がなされ、コースが延長される(図5(c)の指5d、図5(d)参照)。
【0045】
垂線設定部110cは、ステップS105の処理で、ゴール操作に応じた操作信号が供給されたと判別すると(ステップS105;YES)、直近で設定した経路上の所定点(ゴール点になる)を通り、経路に垂直な垂線をゴールライン(計測ライン)として設定する(ステップS108)。このゴールラインの設定は、上記のスタートラインの設定と略同様なので、説明を省略する(スタートラインが、ゴールラインに変更される)。垂線設定部110cは、ゴールラインを設定すると、このゴールラインを地図情報が表す地図上で特定できるデータ(ゴールライン情報)を生成し、RAM112に保持する。また、垂線設定部110cは、太線によってコース表示した経路を走行経路(コース)として特定したコース(経路情報で示される経路上のコース)のデータ(コース情報)を適宜生成し、RAM112に保持して良い。RAM112に保持される、スタートライン情報と、ゴールライン情報と、コース情報と、は、互いに対応付けて保持される。また、垂線設定部110cは、RAM112に保持した、スタートライン情報と、ゴールライン情報と、コース情報と、を適宜記憶部120(内部記憶部120a又は外部記憶部120b)に記録する。例えば、スタートライン情報と、ゴールライン情報と、コース情報と、はユーザの操作部130の操作によって、所定の識別データ(例えば、走行経路のスタートの住所等を示すデータ)とともに互いが対応付けられて記憶部120に記録される。これによって、後日、ユーザの操作に基づいて、この走行経路での走行時間の計測が行われる。
【0046】
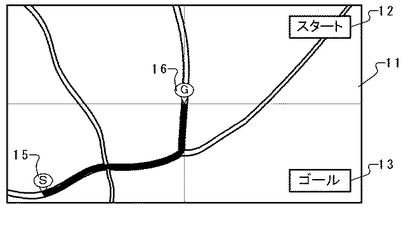
なお、垂線設定部110cがゴールラインを設定すると、表示制御部110fは操作画面上に、所定点を指すゴールマーク16を重畳表示する(図5(d)参照)。なお、ゴールマーク16の画像データ等は、内部記憶部120aに予め記録されているものとする。垂線設定部110cは、内部記憶部120aから前記の画像データを取得し使用して、操作画面にゴールマーク16を重畳した画像を表す表示データを生成し、表示部140に供給する。これによって、ゴールマーク16が表示部140に重畳表示される。図8のように、表示制御部110fは、最後に、スタートからゴールまでのコースが地図上で表された画像を表す表示データを生成して、表示部140に供給し、表示部140に図8のような画面を表示する。ステップS108の処理後、計測ライン設定処理(1)は終了する。なお、ここでは、スタートライン情報と、ゴールライン情報と、コース情報と、はRAM112に保持され続け、後述の計測処理(1)で使用されるものとする。
【0047】
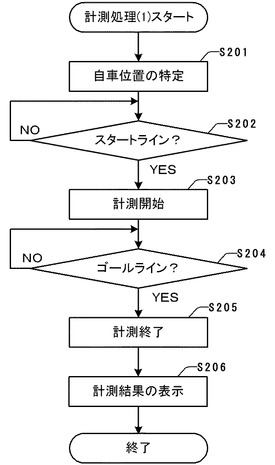
次に、計測ライン設定処理(1)で設定された、スタートラインと、ゴールラインと、に基づいて走行経路の走行時間を計測するための計測処理(1)について図9等を参照して説明する。計測処理(1)は、ユーザの操作部130への操作を契機として開始される。また、この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。
【0048】
ここでは、計測処理(1)では、スタートライン情報と、ゴールライン情報と、は、上記でRAM112に保持されたものを使用する。スタートライン情報と、ゴールライン情報と、は、例えば、記憶部120に記録されたものであってもよい。この場合には、上記の識別データが示す前記の住所等に基づいて、ユーザが指定した、スタートライン情報と、ゴールライン情報と、が記憶部120から読み出されて(RAM112に保持されて)使用される。
【0049】
まず、位置情報取得部110bは、現在の位置情報を位置情報供給部170から取得し、自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、車両1の位置を特定する(ステップS201)。この処理以降、位置情報取得部110bは、所定の時間間隔(例えば、0.1秒毎)で順次位置情報を取得する。情報取得部110aは、位置情報取得部110bが取得した位置情報が示す緯度経度の位置を含む所定の地域のカーナビ用地図データ(特に地図情報)を適宜内部記憶部120aから取得する。自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、位置情報取得部110bが取得したカーナビ用地図データが表す地図上における車両1の位置を特定する。
【0050】
次に、位置特定部が車両1の位置を特定すると、計測部110eは、RAM112に保持するスタートライン情報に基づいて、つまり、垂線設定部110cによって設定されたスタートラインに基づいて、前記の地図上において、自車位置特定部110dが特定した車両1の位置がスタートラインに達したかを判別する(ステップS202)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているスタートライン上に位置するか、スタートラインをまたいだときに、スタートラインに達したと判別される。
【0051】
計測部110eは、車両1の位置がスタートラインに達するまで待機する(ステップS202;NO)。また、計測部110eは、車両1の位置がスタートラインに達すると判別すると(ステップS202;YES)、タイマ部150を用いて走行時間の計測を開始する。つまり、この処理によって、時間の計測が開始される。
【0052】
例えば、上記のような処理によって、図10に示すように車両1がスタートライン26を横切ったときに走行時間の計測が開始される(ステップS203)。つまり、スタートライン26は、走行時間の計測の基準となるラインになる。
【0053】
次に、計測部110eは、走行時間の計測を開始すると、RAM112に保持するゴールライン情報に基づいて、つまり、垂線設定部110cによって設定されたゴールラインに基づいて、前記の地図上において、自車位置特定部110dが特定した車両1の位置がゴールラインに達したかを判別する(ステップS204)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているゴールライン上に位置するか、ゴールライン上をまたいだときに、ゴールラインに達したと判別される。
【0054】
計測部110eは、車両1の位置がゴールラインに達するまで待機する(ステップS204;NO)。また、計測部110eは、車両1の位置がゴールラインに達すると判別すると(ステップS204;YES)、タイマ部150を用いた走行時間の計測を終了する(ステップS205)。つまり、この処理によって、走行時間が計測されたことになり、計測を終了したときの時間間隔が走行時間になる。
【0055】
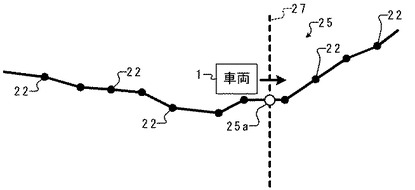
例えば、上記のような処理によって、図11に示すように車両1がゴールライン27を横切ったときに走行時間の計測が終了する(走行時間が計測される)。つまり、ゴールライン27は、走行時間の計測の基準となるラインになる。
【0056】
表示制御部110fは、計測部110eが計測した走行時間を示す画像を表す表示データを生成して、表示部140に供給することで、走行時間を表示部140に表示する(ステップS206、図15参照)。走行時間を示す画像のテンプレート画像等は、適宜記憶部120に記録され、表示制御部110fによって取得され、使用されるものとする。なお、走行時間を示すデータ(走行時間情報)は、適宜、記憶部120に記録される。
【0057】
なお、上記の処理では、スタートライン又はゴールラインを自車が横切った方向が問われていないが、例えば、自車位置特定部110dが順次特定する自車の位置が所定の方向から横切った場合にのみ、計測を開始又は終了してもよい。例えば、計測部110eは、上記でRAM112に保持する(必要に応じて記憶部120から取得してRAM112に保持する)コース情報に基づいてスタートラインについては、コース情報で示されるコースに向かって自車の位置が動いて、スタートラインを横切ったときにのみ、計測を開始する。また、例えば、計測部110eは、上記でRAM112に保持する(必要に応じて記憶部120から取得してRAM112に保持する)コース情報に基づいてゴールラインについては、コース情報で示されるコースから自車の位置が動いて、ゴールラインを横切ったときにのみ、計測を終了する。例えば、図10では、スタートライン26よりも向かって右側の点22を含む経路が前記のコースになっている。このため、車両1が図10に向かって、スタートライン26よりも左側から右側に向かって移動した場合に、計測を開始する。例えば、図11では、ゴールライン27よりも向かって左側の点22を含む経路が前記のコースになっている。このため、車両1が図11に向かって、ゴールライン27よりも左側から右側に向かって移動した場合に、計測を終了する。
【0058】
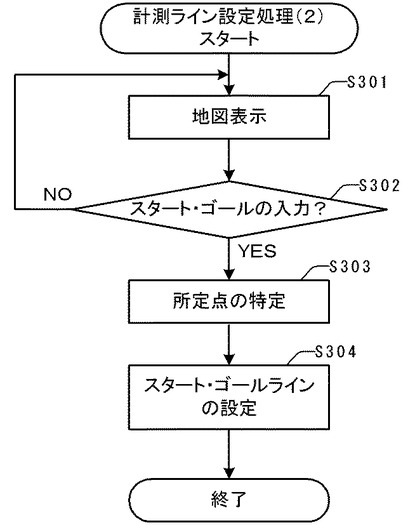
次に、走行時間計測装置100の制御部110が行う計測ライン設定処理(2)を図12等を参照して説明する。この処理は、例えば、ユーザが操作部130を操作して、走行経路の設定モードを選択するとともに、クローズ型の経路を選択したことを契機として始まる。この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。この処理によって、走行経路のスタート及びゴールが設定される。
【0059】
まず、位置情報取得部110b及び表示制御部110fは、計測ライン設定処理(1)におけるステップS101の処理と同様の処理を行い、表示部140に操作画面を表示する(ステップS301)。
【0060】
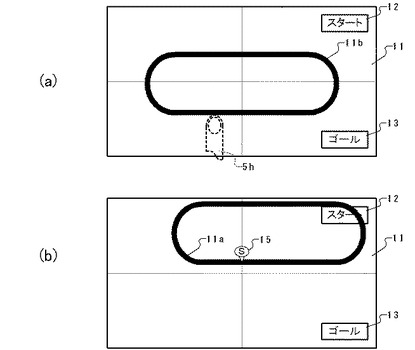
図13(a)に、ステップS101において表示部140が表示する操作画面を示す。表示制御部110fは、図13(a)に示すように、サーキットコース11bが描かれた地図11に、操作キー12と、操作キー13と、が付加された画像を表示部140に表示する。なお、図13(a)及び(b)は、ユーザの操作部130の操作によって経路情報として車両1が以前に走行した軌跡(経路)を表すデータが選択された場合の操作画面である。表示制御部110fは、前記軌跡をなぞった太線を地図上に重畳させて表示する。
【0061】
また、ステップS301の処理以降、垂線設定部110cが後述のステップS302でYESと判定するまで、ユーザが操作画面(操作部130)の所望の位置を指で触ると、この触った位置である接触位置(地図上での位置)を中心とした地図を表示するように、表示制御部110fは動作する(この処理も計測ライン設定処理(1)と同様)。例えば、図13(a)の指5hのように指が所望の位置に接触すると、指の位置(接触位置)を中心とした地図を含む操作画面が表示部140に表示される(図13(b)参照)。
【0062】
表示制御部110fが上記の表示制御を開始すると、垂線設定部110cは、操作部130からスタート又はゴールを設定する操作(スタート・ゴール操作)に応じた操作信号が供給されたかを判別する(ステップS302)。ユーザが操作画面の所望の位置を指で触ることを繰り返すことによって、表示画面上で、所望の位置が操作画面における地図上の中心に移動する。そして、ユーザは、スタート地点としたい位置が操作画面における地図上の略中心に位置したと思った場合に、操作キー12又は操作キー13に触れる。この操作キー12又は13に触れる操作がスタート又はゴールを設定する操作になり、操作部130は、この操作に応じた操作信号をスタート・ゴール操作に応じた操作信号として垂線設定部110cに供給する。垂線設定部110cは、スタート・ゴール操作に応じた操作信号が供給されるまで、ステップS302の処理を繰り返し、スタート操作がユーザによって行われるまで待機する(ステップS302;NO)。
【0063】
一方、垂線設定部110cは、操作部130からスタート・ゴール操作に応じた操作信号が供給された場合(ステップS302;YES)、情報取得部110aが取得した経路情報を用いて、経路情報が表す経路上から、前記地図上の中心と所定の関係にある所定点を特定する(ステップS303)。この処理は、計測ライン設定処理(1)におけるステップS103と同様であるので、説明を省略する。
【0064】
垂線設定部110cは、所定点を特定すると、この所定点を通り、経路に垂直な垂線をスタート・ゴールライン(計測ライン)として設定する(ステップS304)。この処理は、計測ライン設定処理(1)におけるステップS104等の処理と同様であるので、説明を省略する(スタートライン等がスタート・ゴールラインに変更される)。垂線設定部110cは、スタート・ゴールラインを設定すると、このスタート・ゴールラインを地図情報が表す地図上で特定できるデータ(スタート・ゴールライン情報)を生成し、RAM112に保持する。
【0065】
垂線設定部110cがスタート・ゴールラインを設定すると、表示制御部110fは、表示部140に表示している操作画面上に、所定点を指すスタートマーク15を重畳表示する(図13(b)参照)。この処理も計測ライン設定処理(1)における処理と同様であるので、説明を省略する。
【0066】
以上によって、計測ライン設定処理(2)の処理は終了する。
【0067】
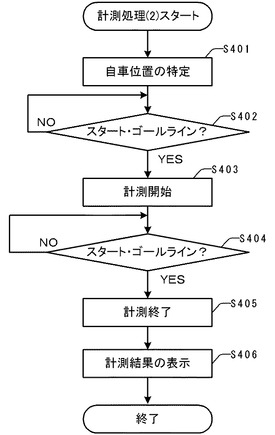
次に、計測ライン設定処理(2)で設定された、スタート・ゴールラインに基づいて走行経路の走行時間を計測するための計測処理(2)について図14等を参照して説明する。計測処理(2)は、ユーザの操作部130への操作を契機として開始される。また、この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。
【0068】
計測処理(2)では、スタート・ゴールライン情報は、例えば、上記でRAM112に保持されたものを使用する。スタート・ゴールライン情報は、例えば、記憶部120に記録されたものであってもよい。この場合には、上記の識別データが示す前記の住所等に基づいて、ユーザが指定した、スタート・ゴールライン情報が記憶部120から読み出されて(RAM112に保持されて)使用される。
【0069】
まず、位置情報取得部110bは、現在の位置情報を位置情報供給部170から取得し、自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、車両1の位置を特定する(ステップS401)。この処理以降、位置情報取得部110bは、所定の時間間隔(例えば、0.1秒毎)で順次位置情報を取得する。情報取得部110aは、位置情報取得部110bが取得した位置情報が示す緯度経度の位置を含む所定の地域のカーナビ用地図データ(特に地図情報)を適宜内部記憶部120aから取得する。自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、位置情報取得部110bが取得したカーナビ用地図データが表す地図上における車両1の位置を特定する。
【0070】
次に、位置特定部が車両1の位置を特定すると、計測部110eは、RAM112に保持するスタート・ゴールライン情報に基づいて、つまり、垂線設定部110cによって設定されたスタート・ゴールラインに基づいて、前記の地図上において、自車位置特定部110dが特定した車両1の位置がスタート・ゴールラインに達したかを判別する(ステップS402)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているスタート・ゴールライン上に位置するか、スタート・ゴールラインをまたいだときに、スタート・ゴールラインに達したと判別される。
【0071】
計測部110eは、車両1の位置がスタート・ゴールラインに達するまで待機する(ステップS402;NO)。また、計測部110eは、車両1の位置がスタート・ゴールラインに達すると判別すると(ステップS402;YES)、タイマ部150を用いて走行時間の計測を開始する。つまり、この処理によって、時間の計測が開始される。
【0072】
例えば、上記のような処理によって、計測処理(1)の処理と同様(図10を参照、スタートラインがスタート・ゴールラインになる。)、車両1がスタート・ゴールラインを横切ったときに走行時間の計測が開始される(ステップS403)。つまり、スタート・ゴールラインは、走行時間の計測の基準となるラインになる。
【0073】
次に、計測部110eは、走行時間の計測を開始すると、再度スタート・ゴールライン情報に基づいて、つまり、垂線設定部110cによって設定されたスタート・ゴールラインに基づいて、前記の地図上において、位置特定部が特定した車両1の位置がスタート・ゴールラインに達したかを判別する(ステップS404)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているスタート・ゴールライン上に位置するか、スタート・ゴールライン上をまたいだときに、スタート・ゴールラインに達したと判別される。
【0074】
計測部110eは、車両1の位置がスタート・ゴールラインに達するまで待機する(ステップS404;NO)。また、計測部110eは、車両1の位置がスタート・ゴールラインに達すると判別すると(ステップS404;YES)、タイマ部150を用いた走行時間の計測を終了する(ステップS405)。つまり、この処理によって、走行経路1周分の走行時間が計測されたことになり、計測を終了したときの時間間隔が走行時間になる。
【0075】
例えば、上記のような処理によって、計測処理(1)の処理と同様(図11を参照、ゴールラインがスタート・ゴールラインになる。)、車両1がスタート・ゴールラインを横切ったときに走行時間の計測が終了する(ステップS405)。つまり、スタート・ゴールラインは、走行時間の計測の基準となるラインになる。
【0076】
表示制御部110fは、計測部110eが計測した走行時間を示す画像を表す表示データを生成して、表示部140に供給することで、走行時間を表示部140に表示する(ステップS406、図15参照)。走行時間を示す画像のテンプレート画像等は、適宜記憶部120に記録され、表示制御部110fによって取得され、使用されるものとする。なお、走行時間を示すデータ(走行時間情報)は、適宜、記憶部120に記録される。そして、計測処理(2)は終了する。
【0077】
なお、上記の処理では、スタート・ゴールラインを自車が横切った方向が問われていないが、例えば、自車位置特定部110dが順次特定する自車の位置が所定の方向から横切った場合にのみ、計測を開始又は終了してもよい。例えば、計測部110eは、計測処理(1)等で使用したコース情報等(例えば、計測ライン設定処理(1)と同様の処理で生成される)を使用して、計測処理(1)で説明した処理と同様の処理を行う。また、例えば、ユーザの操作部130への操作による指定等によって、走行経路の周回の回る方向(例えば、図13(a)で右回り)を予め設定しておき、この回る方向に沿った方向(例えば、図13(a)で右回り)に沿って自車の位置が移動して、自車が前記スタート・ゴールラインを横切ったときにのみ、計測を開始又は終了する。また、計測部は、一周ごとのラップタイムを計測してもよい。
【0078】
以上で説明したように、本実施形態の走行時間計測装置100は、ここでは上記構成によって、自車による所定経路の走行時間を計測する。そして、情報取得部110aは、地図を表す地図情報と地図上で自車が走行可能な経路を表す経路情報とを取得する。また、垂線設定部110cは、情報取得部110aが取得した地図情報が表す地図上において、ユーザの操作部130への操作(スタート、ゴール等を指定するユーザの操作部130への操作)に基づいて(つまり、ユーザの操作に応じた操作信号に基づいて)、情報取得部110aが取得した経路情報が表す経路上の所定点(ここでは、スタート点及びゴール点、又は、スタート・ゴール点)を特定し、特定した所定点を通り経路に垂直な垂線を計測ライン(ここでは、スタートライン及びゴールライン、又は、スタート・ゴールライン)として設定する。また、位置情報取得部110bは、自車の位置を示す位置情報を順次取得する。また、自車位置特定部110dは、位置情報取得部110bが順次取得した位置情報に基づいて、情報取得部110aが取得した地図情報が表す地図上における自車の位置を順次特定する。そして、計測部110eは、自車位置特定部110dが順次特定する自車の位置が計測ライン(ここでは、スタートライン及びゴールライン、又は、スタート・ゴールライン)を横切ったときを計測の基準として前記走行時間を計測する。ここでは、計測部110eは、自車位置特定部110dが順次特定する自車の位置がスタートライン(又はスタート・ゴールライン)を横切ったときに計測を開始する。ここでは、計測部110eは、自車位置特定部110dが順次特定する自車の位置がゴールライン(又はスタート・ゴールライン)を横切ったときに計測を終了する。
【0079】
以上のような構成によって、所定経路(走行経路)に対する垂線を計測ラインとし、このラインを計測の基準にするため、車両1がコース(走行経路)の例えば端を走った場合等においても、車両1は、計測ラインを横切ることになるため、計測が確実に行われ、走行時間の計測が精度良く行われる。また、所定経路(走行経路)に対する垂線を計測ラインとするため、車両1がコースのどの位置を走っていても、計測の開始又は終了するタイミングは同じ又は略同じになるため、計測時間の誤差が無くなるか略無くなるため、走行時間の計測が精度良く行われる。
【0080】
また、上記のように、経路は、地図上における複数の点を含み、経路情報は、複数の点それぞれの位置情報によって表される情報であり、垂線設定部110cは、地図上において複数の点のうちの隣り合う点同士を結んだ線分上で、ユーザの操作によって指定された地図上における指定点と所定の関係にある点を前記所定点として特定する。これによって、ユーザの操作が正確でなくても、経路上の所定点を的確に特定することができる。また、垂線設定部110cは前記線分のうち、前記ユーザの操作によって指定された前記地図上における指定点と一定の関係にある前記線分を特定し、特定した前記線分に対して前記指定点から垂線を引いたときに、この垂線と前記線分とが交わる点を前記所定点として特定することによって、ユーザの操作が正確でなくても、経路上の所定点を的確に特定することができるとともに、マップマッチング等の既存の技術を用いて所定点を容易に特定できる。
【0081】
また、上記のように、計測手段は、自車位置特定部110dが順次特定する自車の位置が所定の方向に動いて計測ラインを横切ったときを計測の基準とすることによって、例えば、コースを逆走した場合における走行時間の誤計測を防止できる。
【0082】
なお、上記走行時間計測装置100は、計測ラインの設定のみを行っても良い。この場合、この装置は、計測ライン設定装置となる。
【0083】
また、前記の垂線(計測ライン)は、例えば、指定点を通る線でもあるので、所定点の特定と同時に、計測ラインを設定してもよい。つまり、所定点を特定し、計測ラインを設定するとは、指定点が特定されると、この指定点を通る計測ラインを所定点を中点として設定することも含む。なお、操作部130は、タッチパネルディスプレイ141のセンサ部以外の入力装置(例えば、所定のキーを備える入力装置)によって構成されてもよい。この場合でも操作部130は、ユーザの操作に応じた操作信号を供給する。垂線設定部110cは、例えば、上記のように、この操作信号に基づいて所定点(又は指定点)を特定する。
【符号の説明】
【0084】
1 車両
100 走行時間計測装置
101 筐体
110 制御部
110a 情報取得部
110b 位置情報取得部
110c 垂線設定部
110d 自車位置特定部
110e 計測部
110f 表示制御部
111 CPU
112 RAM
120 記憶部
120a 内部記憶部
120b 外部記憶部
121 フラッシュメモリ
122 メモリーカード
130 操作部
140 表示部
141 タッチパネルディスプレイ
150 タイマ部
151 タイマ
160 読取・書込部
161 読取・書込装置
170 位置情報供給部
171 GPSアンテナ
172 GPS受信機
173 配線
【技術分野】
【0001】
本発明は、走行時間計測装置、計測ライン設定装置、及び、プログラムに関する。
【背景技術】
【0002】
この種の装置として、例えば、特許文献1には、車両(レーシングカー)の位置情報に基づいて、車両が任意の位置A〜Dに至ったときの走行時間(例えばコースの1周のラップタイム)を計測する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−62321号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の技術では、車両がコースの例えば端を走った場合等において、車両が位置A〜Dを通過しない場合、車両が位置A〜Dに至ったとは判断されない場合があるので、走行時間を正確に計測できなかった。
【0005】
本発明は、このような点に鑑みてなされたものであり、その目的とするところは、精度良く車両の走行時間を計測できる走行時間計測装置及び計測ライン設定装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の第1の観点に係る走行時間計測装置は、
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を計測ラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記計測ラインを横切ったときを計測の基準として前記走行時間を計測する計測手段と、
を備える。
【0007】
また、本発明の第2の観点に係る走行時間計測装置は、
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上のスタート点とゴール点とを前記所定経路のスタートとゴールとを指定するユーザの操作に基づいて特定し、特定した前記スタート点を通り前記経路に垂直な垂線をスタートラインとして設定するとともに、特定した前記ゴール点を通り前記経路に垂直な垂線をゴールラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記スタートラインから前記ゴールラインに達したときの時間間隔を前記走行時間として計測する計測手段と、
を備える。
【0008】
また、本発明の第3の観点に係る計測ライン設定装置は、
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定手段と、
を備える。
【0009】
また、本発明の第4の観点に係るプログラムは、
コンピュータを、
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得部と、
前記情報取得部が取得した前記地図情報が表す前記地図上において、前記情報取得部が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定部と、
として機能させる。
【発明の効果】
【0010】
本発明によれば、精度良く車両の走行時間を計測できる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態の一例に係る走行時間計測装置の構成を示したブロック図である。
【図2】本発明の実施形態の一例に係る走行時間計測装置のハードウェア構成を示したブロック図である。
【図3】図2のハードウェア構成を有する走行時間計測装置の外観図である。
【図4】本発明の実施形態の一例に係る走行時間計測装置が行う計測ライン設定処理(1)のフローチャートである。
【図5】(a)乃至(d)は、本発明の実施形態の一例に係る走行時間計測装置が計測ライン設定処理(1)において表示する操作画面の例である。
【図6】本発明の実施形態の一例に係る走行時間計測装置が所定点を特定するときの例を説明するための説明図である。
【図7】本発明の実施形態の一例に係る走行時間計測装置が計測ラインを設定するときの例を説明するための説明図である。
【図8】本発明の実施形態の一例に係る走行時間計測装置がスタートラインとゴールラインとを設定した後のスタートラインからゴールラインまでの走行経路を示す表示画面の図である。
【図9】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(1)のフローチャートである。
【図10】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(1)における、車両とスタートラインとの関係を示し、計測開始のタイミングを示す図である。
【図11】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(1)における、車両とゴールラインとの関係を示し、計測終了のタイミングを示す図である。
【図12】本発明の実施形態の一例に係る走行時間計測装置が行う計測ライン設定処理(2)のフローチャートである。
【図13】(a)乃至(b)は、本発明の実施形態の一例に係る走行時間計測装置が計測ライン設定処理(2)において表示する操作画面の例である。
【図14】本発明の実施形態の一例に係る走行時間計測装置が行う計測処理(2)のフローチャートである。
【図15】本発明の実施形態の一例に係る走行時間計測装置が表示する走行時間の表示画面の一例である。
【発明を実施するための形態】
【0012】
本発明に係る一実施形態について図面を参照して説明する。なお、本発明は下記の実施形態及び図面によって限定されるものではない。下記の実施形態及び図面に変更(構成要素の削除も含む)を加えることができるのはもちろんである。また、以下の説明では、本発明の理解を容易にするために、重要でない公知の技術的事項の説明を適宜省略する。
【0013】
本実施形態に係る走行時間計測装置100の構成を図1及び図2を参照して説明する。走行時間計測装置100は、自動車、自動二輪車等の車両1に搭載される。
【0014】
走行時間計測装置100は、例えば、カーナビゲーションシステムによって構成される。走行時間計測装置100は、制御部110と、内部記憶部120aと、操作部130と、表示部140と、タイマ部150と、読取・書込部160と、位置情報供給部170と、を備える。
【0015】
制御部110は、走行時間計測装置100全体を制御する。また、制御部110は、データ取得部と、位置情報取得部110bと、垂線設定部110cと、自車位置特定部110dと、計測部110eと、表示制御部110fと、を備える。これらは、内部記憶部120aに記録されたデータ、外部記憶部120bに記録されたデータ、位置情報供給部170から供給される位置情報等を適宜取得、使用して、走行時間計測装置100全体を制御するとともに後述の処理を行う。
【0016】
制御部110は、例えば、CPU111(Central Processing Unit)111と、RAM112(Random Access Memory)112と、を含んで構成される。RAM112は、CPU111のワーキングメモリ等として機能する。RAM112は、CPU111が使用するデータ(制御部110に供給される各データ)、CPU111が生成したデータ(制御部110が各構成要素に供給する各データ)等を適宜一時記憶する。また、RAM112には、制御プログラムがロードされる。CPU111は、RAM112にロードされた制御プログラムに従って、また、RAM112が一時記憶するデータ等に基づいて、制御部110が行う処理(特に、データ取得部と、位置情報取得部110bと、垂線設定部110cと、自車位置特定部110dと、計測部110eと、表示制御部110fとが行う処理)を実際に行う。なお、制御部110の少なくとも一部は、CPU111の他、CPU111が行う処理のうちの少なくとも一部を行う各種専用回路を含んで構成されてもよい。
【0017】
内部記憶部120aは、制御部110が使用するデータ等を記憶する。内部記憶部120aは、制御部110の制御のもと、適宜のタイミングで、記憶しているデータを制御部110に供給する。これによって、制御部110は、適宜のタイミングで、内部記憶部120aからデータを取得する。
【0018】
内部記憶部120aは、例えば、フラッシュメモリ121を含んで構成される。内部記憶部120aには、制御プログラム、各種データ等が記録されている。フラッシュメモリ121に記録された制御プログラムは、RAM112にロードされる。また、フラッシュメモリ121に記録された各種データも、CPU111の制御のもと、適宜のタイミングでRAM112に一時記憶され、CPU111に供給される。これによって、CPU111は、内部記憶部120aから所定のデータを取得する。内部記憶部120aは、例えば、ハードディスク等の他の記憶装置によって構成されてもよい。
【0019】
操作部130は、制御部110(計測位置設定部)の制御のもと、ユーザの操作に基づいた操作信号を制御部110に供給する。また、表示部140は、制御部110(表示制御部110f)の制御のもと、制御部110から供給される表示データに基づいて、この表示データが表す所定の画像を表示する。
【0020】
表示部140と操作部130とは、例えば、タッチパネルディスプレイ141によって構成される。タッチパネルディスプレイ141は、表示部140に当たるディスプレイ部と、操作部130に当たるセンサ部と、からなる。ディスプレイ部は、液晶パネル、EL(Electro-Luminescence)パネル等のディスプレイパネルと、前記ディスプレイパネルを駆動する駆動回路と、によって構成される。駆動回路には、CPU111から表示データが供給される。駆動回路は、この表示データに応じてディスプレイパネルを駆動することによって、ディスプレイパネルに前記の所定の画像を表示する。センサ部は、静電容量式の位置入力装置等によって構成される。ユーザがディスプレイパネルの所定位置を指等で触れると、この指等が接触した位置(例えば、指等が接触している部分の中心位置等をいう。)を示す信号を前記の操作信号として生成し、CPU111に供給する。
【0021】
タイマ部150は、タイマ151等によって構成され、走行時間を計測するために使用される。例えば、タイマ151は、水晶振動子と、発振回路と、を備え、所定周期のクロック信号を生成してCPU111に供給する。CPU111は、このクロック信号の周期に基づいて走行時間を計測する。
【0022】
読取・書込部160は、制御部110の制御のもと、外部記憶部120bにデータを書き込む、又は外部記憶部120bからデータを読み出す。これによって、制御部110は、データを読取・書込部160を介して、外部記憶部120bに書き込む又は外部記憶部120bから取得する。外部記憶部120bは、例えば、マイクロSDカード等のメモリーカード122によって構成され、走行時間計測装置100に取り付けられる。例えば、読取・書込部160は、カードスロット、メディアコントローラ等を備える読取・書込装置161を含んで構成される。カードスロットにメモリーカード122が取り付けられる。CPU111は、メディアコントローラを介してメモリーカード122にデータを書き込む、又はメモリーカード122からデータを読み出す(取得する)。なお、メモリーカード122からCPU111に供給される前記のデータもRAM112に一時記憶される。
【0023】
なお、外部記憶部120bと内部記憶部120aとによって、記憶部120が構成される。記憶部120は、外部記憶部120bのみによって構成されてもよいし、内部記憶部120aのみによって構成されてもよい。また、データ(地図情報、経路情報、後述のカーナビ用地図データ等)、プログラム等は、外部記憶部120b、内部記憶部120aのいずれに記録されても良い。ここでは、プログラム、カーナビ用地図データ等が内部記憶部120aに記録され、所定の経路情報が外部記憶部120bに記録される。
【0024】
位置情報供給部170は、制御部110の制御のもと、車両1(つまり、走行時間計測装置100が搭載された自車)の位置を表す位置情報を生成して制御部110に供給する。位置情報供給部170は、公知の方法で、車両1の位置を特定し、特定した位置を表す前記の位置情報を生成する。
【0025】
例えば、位置情報供給部170は、GPS(Global Positioning System)アンテナ171と、GPS受信機172と、を含んで構成される。GPSアンテナ171は、GPS衛星からの電波を受信する。GPS受信機172は、アンテナで受信した電波に基づいて車両1の位置を示す位置情報を生成し、CPU111に供給する。位置情報供給部170は、他の装置等を含んでもよい。GPSを用いて特定される自車の位置は、前記の他の装置によって補正等がされてもよい。前記の位置は、例えば、緯度及び経度によって表され、前記の位置情報は、例えば、自車の位置の緯度及び経度を示す情報である。
【0026】
図3に図2に示したハードウェア構成を有する走行時間計測装置100の外観を示す。走行時間計測装置100の筐体101には、GPSアンテナ171及びGPSアンテナ171に繋ぐ配線173以外の各構成装置(要素)が納められている。また、筐体101からは、ディスプレイパネルの画面の表示面が露出する。配線173は、GPSアンテナ171と筐体101内部のGPS受信機172とを接続する配線である。GPSアンテナ171は、例えば、車両1のフロントガラスに設置される。筐体101は、例えば、車両1のダッシュボード上等の運転席前方に設置される。
【0027】
次に、走行時間計測装置100の制御部110が行う処理を説明する。走行時間計測装置100の制御部110は、記憶部120から、地図情報と、経路情報と、を取得する。地図情報は、地図(例えば、日本地図)を表すデータであり、ここでは、例えば、所定の情報(道路、施設、地名、住所等の情報)が適宜付加されたデータである。なお、地図情報は、最低限、緯度経度等の位置情報が示す位置を特定できる平面(このような平面も地図と呼ぶ)を示すデータであればよい。また、経路情報は、地図情報の地図上において、道路等の車両1が走行可能な経路を示したデータであり、例えば、地図上における緯度経度で示される複数の点の集合を示す情報である。つまり、経路情報が表す経路は、ここでは、地図上の点を含み、この点によって表現される。
【0028】
上記経路は、一般道の経路等の、一周できないオープン型の経路(スタートとゴールとが異なる位置にある経路)と、サーキットのコース等の、一周が可能なクローズ型の経路(スタートとゴールとが同じ位置にある経路)と、がある。表示制御部110fは、ユーザに走行経路が、オープン型の経路であるか、クローズ型の経路であるか、の選択を促す画面を表示部140に表示する。ユーザが操作部130を用いて、オープン型の経路を選択した場合には、制御部110は、計測ライン設定処理(1)及び計測処理(1)を行う。また、ユーザが操作部130を用いて、クローズ型の経路を選択した場合には、制御部110は、計測ライン設定処理(2)及び計測処理(2)を行う。前記の選択を促す画面の画像データ等は、内部記憶部120aに記録され、表示制御部110fは、適宜のタイミングで、内部記憶部120aから前記の画像データを取得し、表示データを生成し、表示部140に生成した表示データを供給する。これによって、前記の選択を促す画面が表示部140に表示される。
【0029】
公知のカーナビゲーションシステムにおいて使用されるカーナビ用地図データは、前記の地図情報と、経路情報と、を含むデータである。このため、制御部110は、カーナビ用地図データ(予め内部記憶部120aに記録されているものとする。)に基づいて、前記の各処理を行うことができる。カーナビ用地図データは、例えば、内部記憶部120aに記録されているものとする。また、カーナビ用地図データは、例えば、地図の所定の地域等ごとに分けられて内部記憶部120aに記録され、情報取得部110aは、所定の緯度経度を示す位置情報(又は、住所を示す住所情報)等に基づいて、この位置情報が示す緯度経度等が示す位置を含む地域の地図を表すカーナビ用地図データを内部記憶部120aから適宜読み出すものとする。
【0030】
また、経路情報は、カーナビ用地図データとは別に生成されたデータであってもよい。例えば、車両1が以前に走行した軌跡(経路)を表すデータを経路情報としてもよい。このような経路情報は、適宜の方法によって、予め生成され、記録されるものとする。このような経路情報としては、カーナビ用地図データには通常含まれない、例えば、サーキットのコース等の経路情報がある。このような経路情報は、例えば、外部記憶部120bに記録されており、ユーザの操作部130の操作によって、このような経路情報が選択されると、制御部110は、選択された経路情報を取得して計測ライン設定処理(1)又は計測ライン設定処理(2)を行うものとする。また、下記の処理は、基本的に地図情報が表す地図上での処理になる。
【0031】
走行時間計測装置100の制御部110が行う計測ライン設定処理(1)を図4等を参照して説明する。この処理は、例えば、ユーザが操作部130を操作して、走行経路の設定モードを選択するとともに、オープン型の経路を選択したことを契機として始まる。この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。この処理によって、走行経路のスタート及びゴールが設定される。また、以下では、各部が取得したデータ(情報)は、適宜、RAM112に保持(一時記録)される。
【0032】
まず、位置情報取得部110bは、現在の位置情報を位置情報供給部170から取得する。情報取得部110aは、位置情報取得部110bが取得した位置情報が示す緯度経度の位置を含む所定の地域のカーナビ用地図データを内部記憶部120aから取得することによって、地図情報及び経路情報を取得する。そして、表示制御部110fは、情報取得部110aが取得したカーナビ用地図データ(地図情報)と位置情報取得部110bが取得した位置情報とに基づいて、表示部140に表示する地図(上記の位置情報が示す緯度経度を中心とした所定の大きさの地図)に、所定の操作領域を表す画像(操作キー)を付加した画像を表す表示データを生成し表示部140に供給し、操作キーが付加された地図画像を表示部140の画面に表示させる(ステップS101)。表示部140に表示される画像を以下では、操作画面という。なお、操作部130を表す画像を示す画像データは、内部記憶部120aに記録されているものとし、表示制御部110fは、適宜この画像データを取得し、取得したこの画像データを用いて、表示部140に操作キーを付加した地図画像の表示データを生成する処理を行う。
【0033】
なお、前記の所定地域、表示部140に表示する地図等は、ユーザの操作による住所の検索等によって指定され、情報取得部110aは、この指定(住所情報)に基づいて、所定の地域のカーナビ用地図データを内部記憶部120aから取得するとともに、表示制御部110fは、表示部140に表示する地図を特定し、特定した地図に基づいて前記の表示データを生成してもよい。また、表示部140に表示する地図の縮尺は、予め設定されるか、ユーザの操作によって指定されているものとする。また、ユーザの操作部130の操作によって経路情報が選択されていた場合には、情報取得部110aは、選択された経路情報を外部記憶部120bから取得するとともに、この経路情報の経路を含む地域のカーナビ用地図データ(特に地図情報)を内部記憶部120aから取得する。表示制御部110fは、経路情報の経路が含まれる所定の地図を含む操作画面の表示データをカーナビ用地図データ等に基づいて生成し、前記の操作画面を表示部140に表示する処理を行う。
【0034】
図5(a)に、ステップS101において表示部140が表示する画面を示す。表示制御部110fは、図5(a)に示すように、道路11aが描かれた地図(現在の自車の位置が中心となっている。)11に、「スタート」という操作キー12と、「ゴール」という操作キー13と、が付加された画像を表示部140に表示する。
【0035】
また、ステップS101の処理以降、垂線設定部110cが後述のステップS102でYESと判定するまで、ユーザが操作画面(操作部130)の所望の位置を指で触ると、この触った位置である接触位置(操作画面に表示された地図上での位置)を中心とした地図を表示するように、表示制御部110fは動作する。例えば、ステップS101の処理以降、操作部130は、接触位置に応じた操作信号(この接触位置は、操作画面上の地図をユーザが触れたときの前記地図上の触れた位置であり、この操作信号は操作画面上のユーザが触れた位置を示す信号になる。以下、同じ。)を表示制御部110fに供給する。表示制御部110fは、この操作信号を取得すると、情報取得部110aが取得している前記のカーナビ用地図データに基づいて、取得した操作信号が示す地図上の接触位置を中心とした地図であって表示部140に新たに表示する地図に操作キーを付加した画像を表す表示データを新たに生成し表示部140に供給し、表示部140に新たな操作画面を表示させる。例えば、図5(a)の指5aのように指が所望の位置に接触すると、指の位置(接触位置)を中心とした地図を含む操作画面が表示部140に表示される(図5(b)参照)。
【0036】
表示制御部110fが上記の表示制御を開始すると、垂線設定部110cは、操作部130からスタートを設定する操作(スタート操作)に応じた操作信号が供給されたかを判別する(ステップS102)。ユーザが操作画面の所望の位置を指で触ることを繰り返すことによって、表示画面上で、地図上の前記の所望の位置が操作画面における地図上の中心に移動する。そして、ユーザは、スタート地点としたい位置が操作画面における地図上の略中心に位置したと思った場合に、操作キー12に触れる(図5(b)の指5b参照)。この操作キー12に触れる操作がスタートを設定する操作になり、操作部130は、この操作に応じた操作信号をスタート操作に応じた操作信号として垂線設定部110cに供給する。垂線設定部110cは、スタート操作に応じた操作信号が供給されるまで、ステップS102の処理を繰り返し、スタート操作がユーザによって行われるまで待機する(ステップS102;NO)。
【0037】
一方、垂線設定部110cは、操作部130からスタート操作に応じた操作信号が供給された場合(ステップS102;YES、図5(b)参照)、情報取得部110aが取得したカーナビ用地図データの経路情報を用いて、前記地図上の中心(つまり、ユーザの操作によって特定された指定点)と所定の関係にある所定点を地図上で特定する。垂線設定部110cは、例えば、経路情報を用いて、経路情報が表す経路を構成する複数の点のうちの隣り合う点同士を結んだ線分(経路を構成する点も含まれる)上にある点であって、地図上の中心(指定点)と所定の関係にある点を所定点として地図上で特定する。垂線設定部110cは、例えば、前記の複数の線分のうち、地図上の中心(指定点)と最短の距離にある線分に対して垂線を下ろし、この垂線と線分との交点(経路を構成する点となる場合もある)を前記の所定点として特定する。なお、位置情報の履歴(適宜記憶部に記録されるものとする)も考慮するため、必ずしも地図上の中心と最短の距離にある線分が採用されるわけではない。前記の線分と前記の指定点とは、一定の関係にあればよい。このような所定点の特定は、所謂マップマッチング等によって行われる。前記の所定の関係とは、このマップマッチングのアルゴリズム等によって規定されるものであり、マップマッチングの種類等によって異なる。
【0038】
所定点の特定を、図6を参照してより詳細に説明する。経路情報は、経路上の点の位置それぞれを、例えば、緯度経度で示す情報で表すデータである。このため、図6に示すように経路25は、点22の集合で表される。ユーザがスタートとして設定するために触れた位置(つまり、ユーザが操作キー12に触れる前に触れた地図上の位置(地図上で中心になっている位置))が、図6では、接触位置21であるとすると、接触位置21と前記の所定の関係にある点25a(ここでは、接触位置21から隣り合う点22同士を結んだ線分25b(指定点と一定の関係にある線分)に下ろされた垂線との交点である)を前記の所定点(スタート点)として特定する。
【0039】
垂線設定部110cは、所定点を特定すると、この所定点を通り、経路に垂直な垂線をスタートライン(計測ライン)として設定する(ステップS104)。垂線設定部110cは、スタートラインを設定すると、このスタートラインを地図情報が表す地図上で特定できるデータ(スタートライン情報)を生成し、RAM112に保持する。
【0040】
ここで、スタートラインの設定を、図7を参照してより詳細に説明する。垂線設定部110cは、所定点(点25a)を通り前記の線分25bに垂直な垂線(経路に垂直な直線)をスタートライン26として設定する。スタートラインの長さは、例えば、所定点から端部までそれぞれ10mとし、所定点を中点として、20mとする。スタートラインの長さは、適宜の長さを採用できる。
【0041】
垂線設定部110cがスタートラインを設定すると、表示制御部110fは、表示部140に表示している操作画面上に、所定点を指すスタートマーク15を重畳表示する(図5(b)参照)。なお、スタートマーク15の画像データ等は、内部記憶部120aに予め記録されているものとする。垂線設定部110cは、内部記憶部120aから前記の画像データを取得し使用して、操作画面にスタートマーク15を重畳した画像を表す表示データを生成し、表示部140に供給する。これによって、スタートマーク15が表示部140に重畳表示される。
【0042】
垂線設定部110cは、スタートラインを設定すると、操作部130からゴールを設定する操作(ゴール操作)に応じた操作信号が供給されたかを判別する(ステップS105)。ユーザは、ゴール地点としたい位置が操作画面における地図上の中心に位置したと思った場合に、操作キー13に触れる(図5(d)の指5e参照)。この操作キー13に触れる操作がゴールを設定する操作になり、操作部130は、この操作に応じた操作信号をゴール操作に応じた操作信号として垂線設定部110cに供給する。垂線設定部110cは、ゴール操作に応じた操作信号が供給されていないと判別した場合(ステップS105;NO)、操作部130から操作画面への新たな接触操作に応じた操作信号が供給されたか(新たな位置入力があったか)を判別する(ステップS106)。例えば、垂線設定部110cは、直近に供給された操作信号が示す接触位置とは異なる又は前記の所定点の位置とは異なる接触位置を示す操作信号が供給されたかを判別する。表示制御部110fは、接触位置を示す操作信号が供給されていないと判別した場合(ステップS106;NO)、再びステップS105の処理を行う。なお、垂線設定部110cは、後述のゴールラインがスタートラインと重ならないように、新たな位置入力があるまで、ステップS105で、必ずNOと判別するとよい。
【0043】
一方、垂線設定部110cに前記の接触位置を示す操作信号が供給された場合(ステップS106;YES、図5(b)参照)、表示制御部110fは、コース表示を行う(ステップS107)。例えば、情報取得部110aが取得したカーナビ用地図データの経路情報を用いて、垂線設定部110cは、経路情報が表す経路上の、前記の操作信号によって示される地図上の接触位置と所定の関係にある所定点を地図上で特定する。この特定は、ステップS103の処理と同様であるので説明を省略する(地図上で中心になっている位置が接触位置に変更される。)。その後、表示制御部110fは、垂線設定部110cが特定した所定点(地図上での位置)を中心とした地図を表示するように動作する(図5(b)の指5c、及び、図5(c)参照)。この処理は、上記におけるステップS101の処理と略同様の処理(接触位置が所定点に変更される。)であるので説明を省略する。さらに、表示制御部110fは、この表示動作を行う際に、前記スタート点又は前回のステップS106の処理で特定した所定点から今回の処理で特定した所定点までを経路上でなぞった太線(経路が含む点同士を結んだ前記の線分をなぞった太線)を地図上に重畳させて表示する。なお、太線についてのデータ等は、内部記憶部120aに予め記録されているものとする。表示制御部110fは、内部記憶部120aから前記のデータを取得し使用して、操作画面に太線を重畳した画像を表す表示データを生成し、表示部140に供給する。これによって、太線が表示部140に重畳表示される(図5(c)参照)。この太線によって、走行経路(コース)が表示部140に表示される。
【0044】
垂線設定部110c及び表示制御部110fは、ステップS105乃至ステップS107の処理において、ユーザによりゴール操作がされるまで、コース設定(走行経路の設定)がなされ、コースが延長される(図5(c)の指5d、図5(d)参照)。
【0045】
垂線設定部110cは、ステップS105の処理で、ゴール操作に応じた操作信号が供給されたと判別すると(ステップS105;YES)、直近で設定した経路上の所定点(ゴール点になる)を通り、経路に垂直な垂線をゴールライン(計測ライン)として設定する(ステップS108)。このゴールラインの設定は、上記のスタートラインの設定と略同様なので、説明を省略する(スタートラインが、ゴールラインに変更される)。垂線設定部110cは、ゴールラインを設定すると、このゴールラインを地図情報が表す地図上で特定できるデータ(ゴールライン情報)を生成し、RAM112に保持する。また、垂線設定部110cは、太線によってコース表示した経路を走行経路(コース)として特定したコース(経路情報で示される経路上のコース)のデータ(コース情報)を適宜生成し、RAM112に保持して良い。RAM112に保持される、スタートライン情報と、ゴールライン情報と、コース情報と、は、互いに対応付けて保持される。また、垂線設定部110cは、RAM112に保持した、スタートライン情報と、ゴールライン情報と、コース情報と、を適宜記憶部120(内部記憶部120a又は外部記憶部120b)に記録する。例えば、スタートライン情報と、ゴールライン情報と、コース情報と、はユーザの操作部130の操作によって、所定の識別データ(例えば、走行経路のスタートの住所等を示すデータ)とともに互いが対応付けられて記憶部120に記録される。これによって、後日、ユーザの操作に基づいて、この走行経路での走行時間の計測が行われる。
【0046】
なお、垂線設定部110cがゴールラインを設定すると、表示制御部110fは操作画面上に、所定点を指すゴールマーク16を重畳表示する(図5(d)参照)。なお、ゴールマーク16の画像データ等は、内部記憶部120aに予め記録されているものとする。垂線設定部110cは、内部記憶部120aから前記の画像データを取得し使用して、操作画面にゴールマーク16を重畳した画像を表す表示データを生成し、表示部140に供給する。これによって、ゴールマーク16が表示部140に重畳表示される。図8のように、表示制御部110fは、最後に、スタートからゴールまでのコースが地図上で表された画像を表す表示データを生成して、表示部140に供給し、表示部140に図8のような画面を表示する。ステップS108の処理後、計測ライン設定処理(1)は終了する。なお、ここでは、スタートライン情報と、ゴールライン情報と、コース情報と、はRAM112に保持され続け、後述の計測処理(1)で使用されるものとする。
【0047】
次に、計測ライン設定処理(1)で設定された、スタートラインと、ゴールラインと、に基づいて走行経路の走行時間を計測するための計測処理(1)について図9等を参照して説明する。計測処理(1)は、ユーザの操作部130への操作を契機として開始される。また、この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。
【0048】
ここでは、計測処理(1)では、スタートライン情報と、ゴールライン情報と、は、上記でRAM112に保持されたものを使用する。スタートライン情報と、ゴールライン情報と、は、例えば、記憶部120に記録されたものであってもよい。この場合には、上記の識別データが示す前記の住所等に基づいて、ユーザが指定した、スタートライン情報と、ゴールライン情報と、が記憶部120から読み出されて(RAM112に保持されて)使用される。
【0049】
まず、位置情報取得部110bは、現在の位置情報を位置情報供給部170から取得し、自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、車両1の位置を特定する(ステップS201)。この処理以降、位置情報取得部110bは、所定の時間間隔(例えば、0.1秒毎)で順次位置情報を取得する。情報取得部110aは、位置情報取得部110bが取得した位置情報が示す緯度経度の位置を含む所定の地域のカーナビ用地図データ(特に地図情報)を適宜内部記憶部120aから取得する。自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、位置情報取得部110bが取得したカーナビ用地図データが表す地図上における車両1の位置を特定する。
【0050】
次に、位置特定部が車両1の位置を特定すると、計測部110eは、RAM112に保持するスタートライン情報に基づいて、つまり、垂線設定部110cによって設定されたスタートラインに基づいて、前記の地図上において、自車位置特定部110dが特定した車両1の位置がスタートラインに達したかを判別する(ステップS202)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているスタートライン上に位置するか、スタートラインをまたいだときに、スタートラインに達したと判別される。
【0051】
計測部110eは、車両1の位置がスタートラインに達するまで待機する(ステップS202;NO)。また、計測部110eは、車両1の位置がスタートラインに達すると判別すると(ステップS202;YES)、タイマ部150を用いて走行時間の計測を開始する。つまり、この処理によって、時間の計測が開始される。
【0052】
例えば、上記のような処理によって、図10に示すように車両1がスタートライン26を横切ったときに走行時間の計測が開始される(ステップS203)。つまり、スタートライン26は、走行時間の計測の基準となるラインになる。
【0053】
次に、計測部110eは、走行時間の計測を開始すると、RAM112に保持するゴールライン情報に基づいて、つまり、垂線設定部110cによって設定されたゴールラインに基づいて、前記の地図上において、自車位置特定部110dが特定した車両1の位置がゴールラインに達したかを判別する(ステップS204)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているゴールライン上に位置するか、ゴールライン上をまたいだときに、ゴールラインに達したと判別される。
【0054】
計測部110eは、車両1の位置がゴールラインに達するまで待機する(ステップS204;NO)。また、計測部110eは、車両1の位置がゴールラインに達すると判別すると(ステップS204;YES)、タイマ部150を用いた走行時間の計測を終了する(ステップS205)。つまり、この処理によって、走行時間が計測されたことになり、計測を終了したときの時間間隔が走行時間になる。
【0055】
例えば、上記のような処理によって、図11に示すように車両1がゴールライン27を横切ったときに走行時間の計測が終了する(走行時間が計測される)。つまり、ゴールライン27は、走行時間の計測の基準となるラインになる。
【0056】
表示制御部110fは、計測部110eが計測した走行時間を示す画像を表す表示データを生成して、表示部140に供給することで、走行時間を表示部140に表示する(ステップS206、図15参照)。走行時間を示す画像のテンプレート画像等は、適宜記憶部120に記録され、表示制御部110fによって取得され、使用されるものとする。なお、走行時間を示すデータ(走行時間情報)は、適宜、記憶部120に記録される。
【0057】
なお、上記の処理では、スタートライン又はゴールラインを自車が横切った方向が問われていないが、例えば、自車位置特定部110dが順次特定する自車の位置が所定の方向から横切った場合にのみ、計測を開始又は終了してもよい。例えば、計測部110eは、上記でRAM112に保持する(必要に応じて記憶部120から取得してRAM112に保持する)コース情報に基づいてスタートラインについては、コース情報で示されるコースに向かって自車の位置が動いて、スタートラインを横切ったときにのみ、計測を開始する。また、例えば、計測部110eは、上記でRAM112に保持する(必要に応じて記憶部120から取得してRAM112に保持する)コース情報に基づいてゴールラインについては、コース情報で示されるコースから自車の位置が動いて、ゴールラインを横切ったときにのみ、計測を終了する。例えば、図10では、スタートライン26よりも向かって右側の点22を含む経路が前記のコースになっている。このため、車両1が図10に向かって、スタートライン26よりも左側から右側に向かって移動した場合に、計測を開始する。例えば、図11では、ゴールライン27よりも向かって左側の点22を含む経路が前記のコースになっている。このため、車両1が図11に向かって、ゴールライン27よりも左側から右側に向かって移動した場合に、計測を終了する。
【0058】
次に、走行時間計測装置100の制御部110が行う計測ライン設定処理(2)を図12等を参照して説明する。この処理は、例えば、ユーザが操作部130を操作して、走行経路の設定モードを選択するとともに、クローズ型の経路を選択したことを契機として始まる。この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。この処理によって、走行経路のスタート及びゴールが設定される。
【0059】
まず、位置情報取得部110b及び表示制御部110fは、計測ライン設定処理(1)におけるステップS101の処理と同様の処理を行い、表示部140に操作画面を表示する(ステップS301)。
【0060】
図13(a)に、ステップS101において表示部140が表示する操作画面を示す。表示制御部110fは、図13(a)に示すように、サーキットコース11bが描かれた地図11に、操作キー12と、操作キー13と、が付加された画像を表示部140に表示する。なお、図13(a)及び(b)は、ユーザの操作部130の操作によって経路情報として車両1が以前に走行した軌跡(経路)を表すデータが選択された場合の操作画面である。表示制御部110fは、前記軌跡をなぞった太線を地図上に重畳させて表示する。
【0061】
また、ステップS301の処理以降、垂線設定部110cが後述のステップS302でYESと判定するまで、ユーザが操作画面(操作部130)の所望の位置を指で触ると、この触った位置である接触位置(地図上での位置)を中心とした地図を表示するように、表示制御部110fは動作する(この処理も計測ライン設定処理(1)と同様)。例えば、図13(a)の指5hのように指が所望の位置に接触すると、指の位置(接触位置)を中心とした地図を含む操作画面が表示部140に表示される(図13(b)参照)。
【0062】
表示制御部110fが上記の表示制御を開始すると、垂線設定部110cは、操作部130からスタート又はゴールを設定する操作(スタート・ゴール操作)に応じた操作信号が供給されたかを判別する(ステップS302)。ユーザが操作画面の所望の位置を指で触ることを繰り返すことによって、表示画面上で、所望の位置が操作画面における地図上の中心に移動する。そして、ユーザは、スタート地点としたい位置が操作画面における地図上の略中心に位置したと思った場合に、操作キー12又は操作キー13に触れる。この操作キー12又は13に触れる操作がスタート又はゴールを設定する操作になり、操作部130は、この操作に応じた操作信号をスタート・ゴール操作に応じた操作信号として垂線設定部110cに供給する。垂線設定部110cは、スタート・ゴール操作に応じた操作信号が供給されるまで、ステップS302の処理を繰り返し、スタート操作がユーザによって行われるまで待機する(ステップS302;NO)。
【0063】
一方、垂線設定部110cは、操作部130からスタート・ゴール操作に応じた操作信号が供給された場合(ステップS302;YES)、情報取得部110aが取得した経路情報を用いて、経路情報が表す経路上から、前記地図上の中心と所定の関係にある所定点を特定する(ステップS303)。この処理は、計測ライン設定処理(1)におけるステップS103と同様であるので、説明を省略する。
【0064】
垂線設定部110cは、所定点を特定すると、この所定点を通り、経路に垂直な垂線をスタート・ゴールライン(計測ライン)として設定する(ステップS304)。この処理は、計測ライン設定処理(1)におけるステップS104等の処理と同様であるので、説明を省略する(スタートライン等がスタート・ゴールラインに変更される)。垂線設定部110cは、スタート・ゴールラインを設定すると、このスタート・ゴールラインを地図情報が表す地図上で特定できるデータ(スタート・ゴールライン情報)を生成し、RAM112に保持する。
【0065】
垂線設定部110cがスタート・ゴールラインを設定すると、表示制御部110fは、表示部140に表示している操作画面上に、所定点を指すスタートマーク15を重畳表示する(図13(b)参照)。この処理も計測ライン設定処理(1)における処理と同様であるので、説明を省略する。
【0066】
以上によって、計測ライン設定処理(2)の処理は終了する。
【0067】
次に、計測ライン設定処理(2)で設定された、スタート・ゴールラインに基づいて走行経路の走行時間を計測するための計測処理(2)について図14等を参照して説明する。計測処理(2)は、ユーザの操作部130への操作を契機として開始される。また、この処理は、例えば、ユーザの操作部130への操作(他のモードへの切り替え操作等)に応じて、適宜終了されるものとする。
【0068】
計測処理(2)では、スタート・ゴールライン情報は、例えば、上記でRAM112に保持されたものを使用する。スタート・ゴールライン情報は、例えば、記憶部120に記録されたものであってもよい。この場合には、上記の識別データが示す前記の住所等に基づいて、ユーザが指定した、スタート・ゴールライン情報が記憶部120から読み出されて(RAM112に保持されて)使用される。
【0069】
まず、位置情報取得部110bは、現在の位置情報を位置情報供給部170から取得し、自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、車両1の位置を特定する(ステップS401)。この処理以降、位置情報取得部110bは、所定の時間間隔(例えば、0.1秒毎)で順次位置情報を取得する。情報取得部110aは、位置情報取得部110bが取得した位置情報が示す緯度経度の位置を含む所定の地域のカーナビ用地図データ(特に地図情報)を適宜内部記憶部120aから取得する。自車位置特定部110dは、位置情報供給部170が取得した位置情報が示す緯度経度を特定することによって、位置情報取得部110bが取得したカーナビ用地図データが表す地図上における車両1の位置を特定する。
【0070】
次に、位置特定部が車両1の位置を特定すると、計測部110eは、RAM112に保持するスタート・ゴールライン情報に基づいて、つまり、垂線設定部110cによって設定されたスタート・ゴールラインに基づいて、前記の地図上において、自車位置特定部110dが特定した車両1の位置がスタート・ゴールラインに達したかを判別する(ステップS402)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているスタート・ゴールライン上に位置するか、スタート・ゴールラインをまたいだときに、スタート・ゴールラインに達したと判別される。
【0071】
計測部110eは、車両1の位置がスタート・ゴールラインに達するまで待機する(ステップS402;NO)。また、計測部110eは、車両1の位置がスタート・ゴールラインに達すると判別すると(ステップS402;YES)、タイマ部150を用いて走行時間の計測を開始する。つまり、この処理によって、時間の計測が開始される。
【0072】
例えば、上記のような処理によって、計測処理(1)の処理と同様(図10を参照、スタートラインがスタート・ゴールラインになる。)、車両1がスタート・ゴールラインを横切ったときに走行時間の計測が開始される(ステップS403)。つまり、スタート・ゴールラインは、走行時間の計測の基準となるラインになる。
【0073】
次に、計測部110eは、走行時間の計測を開始すると、再度スタート・ゴールライン情報に基づいて、つまり、垂線設定部110cによって設定されたスタート・ゴールラインに基づいて、前記の地図上において、位置特定部が特定した車両1の位置がスタート・ゴールラインに達したかを判別する(ステップS404)。位置情報によって示される車両1の位置の緯度経度が、地図上において設定されているスタート・ゴールライン上に位置するか、スタート・ゴールライン上をまたいだときに、スタート・ゴールラインに達したと判別される。
【0074】
計測部110eは、車両1の位置がスタート・ゴールラインに達するまで待機する(ステップS404;NO)。また、計測部110eは、車両1の位置がスタート・ゴールラインに達すると判別すると(ステップS404;YES)、タイマ部150を用いた走行時間の計測を終了する(ステップS405)。つまり、この処理によって、走行経路1周分の走行時間が計測されたことになり、計測を終了したときの時間間隔が走行時間になる。
【0075】
例えば、上記のような処理によって、計測処理(1)の処理と同様(図11を参照、ゴールラインがスタート・ゴールラインになる。)、車両1がスタート・ゴールラインを横切ったときに走行時間の計測が終了する(ステップS405)。つまり、スタート・ゴールラインは、走行時間の計測の基準となるラインになる。
【0076】
表示制御部110fは、計測部110eが計測した走行時間を示す画像を表す表示データを生成して、表示部140に供給することで、走行時間を表示部140に表示する(ステップS406、図15参照)。走行時間を示す画像のテンプレート画像等は、適宜記憶部120に記録され、表示制御部110fによって取得され、使用されるものとする。なお、走行時間を示すデータ(走行時間情報)は、適宜、記憶部120に記録される。そして、計測処理(2)は終了する。
【0077】
なお、上記の処理では、スタート・ゴールラインを自車が横切った方向が問われていないが、例えば、自車位置特定部110dが順次特定する自車の位置が所定の方向から横切った場合にのみ、計測を開始又は終了してもよい。例えば、計測部110eは、計測処理(1)等で使用したコース情報等(例えば、計測ライン設定処理(1)と同様の処理で生成される)を使用して、計測処理(1)で説明した処理と同様の処理を行う。また、例えば、ユーザの操作部130への操作による指定等によって、走行経路の周回の回る方向(例えば、図13(a)で右回り)を予め設定しておき、この回る方向に沿った方向(例えば、図13(a)で右回り)に沿って自車の位置が移動して、自車が前記スタート・ゴールラインを横切ったときにのみ、計測を開始又は終了する。また、計測部は、一周ごとのラップタイムを計測してもよい。
【0078】
以上で説明したように、本実施形態の走行時間計測装置100は、ここでは上記構成によって、自車による所定経路の走行時間を計測する。そして、情報取得部110aは、地図を表す地図情報と地図上で自車が走行可能な経路を表す経路情報とを取得する。また、垂線設定部110cは、情報取得部110aが取得した地図情報が表す地図上において、ユーザの操作部130への操作(スタート、ゴール等を指定するユーザの操作部130への操作)に基づいて(つまり、ユーザの操作に応じた操作信号に基づいて)、情報取得部110aが取得した経路情報が表す経路上の所定点(ここでは、スタート点及びゴール点、又は、スタート・ゴール点)を特定し、特定した所定点を通り経路に垂直な垂線を計測ライン(ここでは、スタートライン及びゴールライン、又は、スタート・ゴールライン)として設定する。また、位置情報取得部110bは、自車の位置を示す位置情報を順次取得する。また、自車位置特定部110dは、位置情報取得部110bが順次取得した位置情報に基づいて、情報取得部110aが取得した地図情報が表す地図上における自車の位置を順次特定する。そして、計測部110eは、自車位置特定部110dが順次特定する自車の位置が計測ライン(ここでは、スタートライン及びゴールライン、又は、スタート・ゴールライン)を横切ったときを計測の基準として前記走行時間を計測する。ここでは、計測部110eは、自車位置特定部110dが順次特定する自車の位置がスタートライン(又はスタート・ゴールライン)を横切ったときに計測を開始する。ここでは、計測部110eは、自車位置特定部110dが順次特定する自車の位置がゴールライン(又はスタート・ゴールライン)を横切ったときに計測を終了する。
【0079】
以上のような構成によって、所定経路(走行経路)に対する垂線を計測ラインとし、このラインを計測の基準にするため、車両1がコース(走行経路)の例えば端を走った場合等においても、車両1は、計測ラインを横切ることになるため、計測が確実に行われ、走行時間の計測が精度良く行われる。また、所定経路(走行経路)に対する垂線を計測ラインとするため、車両1がコースのどの位置を走っていても、計測の開始又は終了するタイミングは同じ又は略同じになるため、計測時間の誤差が無くなるか略無くなるため、走行時間の計測が精度良く行われる。
【0080】
また、上記のように、経路は、地図上における複数の点を含み、経路情報は、複数の点それぞれの位置情報によって表される情報であり、垂線設定部110cは、地図上において複数の点のうちの隣り合う点同士を結んだ線分上で、ユーザの操作によって指定された地図上における指定点と所定の関係にある点を前記所定点として特定する。これによって、ユーザの操作が正確でなくても、経路上の所定点を的確に特定することができる。また、垂線設定部110cは前記線分のうち、前記ユーザの操作によって指定された前記地図上における指定点と一定の関係にある前記線分を特定し、特定した前記線分に対して前記指定点から垂線を引いたときに、この垂線と前記線分とが交わる点を前記所定点として特定することによって、ユーザの操作が正確でなくても、経路上の所定点を的確に特定することができるとともに、マップマッチング等の既存の技術を用いて所定点を容易に特定できる。
【0081】
また、上記のように、計測手段は、自車位置特定部110dが順次特定する自車の位置が所定の方向に動いて計測ラインを横切ったときを計測の基準とすることによって、例えば、コースを逆走した場合における走行時間の誤計測を防止できる。
【0082】
なお、上記走行時間計測装置100は、計測ラインの設定のみを行っても良い。この場合、この装置は、計測ライン設定装置となる。
【0083】
また、前記の垂線(計測ライン)は、例えば、指定点を通る線でもあるので、所定点の特定と同時に、計測ラインを設定してもよい。つまり、所定点を特定し、計測ラインを設定するとは、指定点が特定されると、この指定点を通る計測ラインを所定点を中点として設定することも含む。なお、操作部130は、タッチパネルディスプレイ141のセンサ部以外の入力装置(例えば、所定のキーを備える入力装置)によって構成されてもよい。この場合でも操作部130は、ユーザの操作に応じた操作信号を供給する。垂線設定部110cは、例えば、上記のように、この操作信号に基づいて所定点(又は指定点)を特定する。
【符号の説明】
【0084】
1 車両
100 走行時間計測装置
101 筐体
110 制御部
110a 情報取得部
110b 位置情報取得部
110c 垂線設定部
110d 自車位置特定部
110e 計測部
110f 表示制御部
111 CPU
112 RAM
120 記憶部
120a 内部記憶部
120b 外部記憶部
121 フラッシュメモリ
122 メモリーカード
130 操作部
140 表示部
141 タッチパネルディスプレイ
150 タイマ部
151 タイマ
160 読取・書込部
161 読取・書込装置
170 位置情報供給部
171 GPSアンテナ
172 GPS受信機
173 配線
【特許請求の範囲】
【請求項1】
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を計測ラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記計測ラインを横切ったときを計測の基準として前記走行時間を計測する計測手段と、
を備えることを特徴とする走行時間計測装置。
【請求項2】
前記経路は、前記地図上における複数の点を含み、
前記経路情報は、前記複数の点それぞれによって表される情報であり、
前記垂線設定手段は、前記地図上において前記複数の点のうちの隣り合う点同士を結んだ線分上で、前記ユーザの操作によって指定された前記地図上における指定点と所定の関係にある点を前記所定点として特定する、
ことを特徴とする請求項1に記載の走行時間計測装置。
【請求項3】
前記垂線設定手段は、前記線分のうち、前記ユーザの操作によって指定された前記地図上における指定点と一定の関係にある前記線分を特定し、特定した前記線分に対して前記指定点から垂線を引いたときに、この垂線と前記線分とが交わる点を前記所定点として特定する、
ことを特徴とする請求項2に記載の走行時間計測装置。
【請求項4】
前記所定点は、前記指定点に基づいたマップマッチングによって特定される点である、
ことを特徴とする請求項2又は3に記載の走行時間計測装置。
【請求項5】
前記計測手段は、前記自車位置特定手段が順次特定する前記自車の位置が所定の方向に動いて前記計測ラインを横切ったときを前記計測の基準とする、
ことを特徴とする請求項1乃至4のいずれか1項に記載の走行時間計測装置。
【請求項6】
前記計測ラインは、スタートライン又はゴールラインであり、
前記ユーザの操作は、前記所定経路のスタート地点又はゴール地点を指定する操作であり、
前記計測手段は、前記スタートラインを横切ったときに計測を開始するか、前記ゴールラインを横切ったときに計測を終了する、
ことを特徴とする請求項1乃至5のいずれか1項に記載の走行時間計測装置。
【請求項7】
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上のスタート点とゴール点とを前記所定経路のスタートとゴールとを指定するユーザの操作に基づいて特定し、特定した前記スタート点を通り前記経路に垂直な垂線をスタートラインとして設定するとともに、特定した前記ゴール点を通り前記経路に垂直な垂線をゴールラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記スタートラインから前記ゴールラインに達したときの時間間隔を前記走行時間として計測する計測手段と、
を備えることを特徴とする走行時間計測装置。
【請求項8】
垂線設定手段は、前記経路上の1つの所定点を前記スタート点及び前記ゴール点として特定し、特定した前記所定点を通り前記経路に垂直な垂線を前記スタートライン及び前記ゴールラインとして設定する、
ことを特徴とする請求項7に記載の走行時間計測装置。
【請求項9】
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定手段と、
を備えることを特徴とする計測ライン設定装置。
【請求項10】
コンピュータを
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得部と、
前記情報取得部が取得した前記地図情報が表す前記地図上において、前記情報取得部が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定部と、
として機能させることを特徴とするプログラム。
【請求項1】
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を計測ラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記計測ラインを横切ったときを計測の基準として前記走行時間を計測する計測手段と、
を備えることを特徴とする走行時間計測装置。
【請求項2】
前記経路は、前記地図上における複数の点を含み、
前記経路情報は、前記複数の点それぞれによって表される情報であり、
前記垂線設定手段は、前記地図上において前記複数の点のうちの隣り合う点同士を結んだ線分上で、前記ユーザの操作によって指定された前記地図上における指定点と所定の関係にある点を前記所定点として特定する、
ことを特徴とする請求項1に記載の走行時間計測装置。
【請求項3】
前記垂線設定手段は、前記線分のうち、前記ユーザの操作によって指定された前記地図上における指定点と一定の関係にある前記線分を特定し、特定した前記線分に対して前記指定点から垂線を引いたときに、この垂線と前記線分とが交わる点を前記所定点として特定する、
ことを特徴とする請求項2に記載の走行時間計測装置。
【請求項4】
前記所定点は、前記指定点に基づいたマップマッチングによって特定される点である、
ことを特徴とする請求項2又は3に記載の走行時間計測装置。
【請求項5】
前記計測手段は、前記自車位置特定手段が順次特定する前記自車の位置が所定の方向に動いて前記計測ラインを横切ったときを前記計測の基準とする、
ことを特徴とする請求項1乃至4のいずれか1項に記載の走行時間計測装置。
【請求項6】
前記計測ラインは、スタートライン又はゴールラインであり、
前記ユーザの操作は、前記所定経路のスタート地点又はゴール地点を指定する操作であり、
前記計測手段は、前記スタートラインを横切ったときに計測を開始するか、前記ゴールラインを横切ったときに計測を終了する、
ことを特徴とする請求項1乃至5のいずれか1項に記載の走行時間計測装置。
【請求項7】
自車による所定経路の走行時間を計測する走行時間計測装置であって、
地図を表す地図情報と前記地図上で前記自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上のスタート点とゴール点とを前記所定経路のスタートとゴールとを指定するユーザの操作に基づいて特定し、特定した前記スタート点を通り前記経路に垂直な垂線をスタートラインとして設定するとともに、特定した前記ゴール点を通り前記経路に垂直な垂線をゴールラインとして設定する垂線設定手段と、
前記自車の位置を示す位置情報を順次取得する位置情報取得手段と、
前記位置情報取得手段が順次取得した前記位置情報に基づいて、前記情報取得手段が取得した前記地図情報が表す前記地図上における前記自車の位置を順次特定する自車位置特定手段と、
前記自車位置特定手段が順次特定する前記自車の位置が前記スタートラインから前記ゴールラインに達したときの時間間隔を前記走行時間として計測する計測手段と、
を備えることを特徴とする走行時間計測装置。
【請求項8】
垂線設定手段は、前記経路上の1つの所定点を前記スタート点及び前記ゴール点として特定し、特定した前記所定点を通り前記経路に垂直な垂線を前記スタートライン及び前記ゴールラインとして設定する、
ことを特徴とする請求項7に記載の走行時間計測装置。
【請求項9】
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得手段と、
前記情報取得手段が取得した前記地図情報が表す前記地図上において、前記情報取得手段が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定手段と、
を備えることを特徴とする計測ライン設定装置。
【請求項10】
コンピュータを
地図を表す地図情報と前記地図上で自車が走行可能な経路を表す経路情報とを取得する情報取得部と、
前記情報取得部が取得した前記地図情報が表す前記地図上において、前記情報取得部が取得した前記経路情報が表す前記経路上の所定点をユーザの操作に基づいて特定し、特定した前記所定点を通り前記経路に垂直な垂線を、前記自車が前記地図上で横切ったときに前記自車の走行時間の計測するための計測ラインとして設定する垂線設定部と、
として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−169844(P2011−169844A)
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2010−35804(P2010−35804)
【出願日】平成22年2月22日(2010.2.22)
【出願人】(000231512)日本精機株式会社 (1,561)
【出願人】(501274023)株式会社エディア (3)
【Fターム(参考)】
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成22年2月22日(2010.2.22)
【出願人】(000231512)日本精機株式会社 (1,561)
【出願人】(501274023)株式会社エディア (3)
【Fターム(参考)】
[ Back to top ]