
走行玩具
【課題】 簡易迅速な作業で前輪の位置調節に伴う緩衝体の位置調節を行う。
【解決手段】 車輪22L、22Rを回転可能に支持する一対の車輪支持体33L、33Rと、車体90の左右の両側部に設けられ、各車輪支持体を前後方向に沿った支持軸34L、34Rを中心に回動可能に支持する一対の回動支持部35L、35R、36L、36Rと、を備え、各車輪支持体が、回動支持部の軸線よりも外側で車輪を支持すると共に、各車輪支持体の回動支持部の軸線よりも上部に対して車体に反発する方向に弾性力を生じる緩衝体38L、38Rを備えている。
【解決手段】 車輪22L、22Rを回転可能に支持する一対の車輪支持体33L、33Rと、車体90の左右の両側部に設けられ、各車輪支持体を前後方向に沿った支持軸34L、34Rを中心に回動可能に支持する一対の回動支持部35L、35R、36L、36Rと、を備え、各車輪支持体が、回動支持部の軸線よりも外側で車輪を支持すると共に、各車輪支持体の回動支持部の軸線よりも上部に対して車体に反発する方向に弾性力を生じる緩衝体38L、38Rを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪の緩衝構造を備える走行玩具に関するものである。
【背景技術】
【0002】
従来の走行玩具は、車体の左右方向に延出され、その先端部で左右の走行輪をそれぞれ支持する上下に揺動可能な一対のサスペンションアームと、上下方向に伸縮可能であってその下端部を各サスペンションアームに連結されたコイルバネからなる左右ダンパーと、回動可能に車体に支持された二叉のリンク体を介して左右ダンパーの上端部同士を連結する中間ダンパーとを備えている(例えば、特許文献1参照)。
上記構成により、従来の走行玩具は、左右ダンパーの伸縮ストロークと中間ダンパーの伸縮ストロークとの合計となる長いストロークにより、より高い緩衝効果を得ることを可能としている。
【特許文献1】特開昭62−275488号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、走行車両の玩具は、車輪や駆動減を備える一つの車体に対して異なる複数のデザインのボディカバーを用意して交換可能とする場合があった。このような場合、ボディカバーによってホイルベースの長さに差異を生じることがあり、前輪の前後方向の位置調節が行われる。
しかしながら、上記従来の緩衝構造にあっては、車輪を支持する支軸に上下のダンパーを連結し、さらにリンク体を介して左右のダンパーと連結するという複雑な構成を採っている。従って、従来の緩衝構造では、前輪の位置調整時に対応するためには再度の組み直しが非常に煩雑となり、事実上、前輪位置調整が不可能となっていた。
本発明は、走行輪の前後方向の位置変更に際して、車輪の緩衝構造も容易に対応可能とすることを、その目的とする。
【課題を解決するための手段】
【0004】
請求項1記載の走行玩具は、車輪を回転可能に支持する左右一対の車輪支持体と、車体の左右の両側部に設けられ、各車輪支持体を前後方向に沿った軸線を中心に回動可能に支持する左右一対の回動支持部と、を備え、各車輪支持体が、回動支持部の軸線よりも外側で車輪を支持すると共に、各車輪支持体の回動支持部の軸線よりも上部に対して車体に反発する方向に弾性力を生じる緩衝体を備えることを特徴とする。
【0005】
上記走行玩具は、車体の側部に設けられた車輪支持体が車体の前後方向に沿った軸線を中心に回動可能であり、車輪支持体が車輪を回動支持部の軸線よりも外側(車体の左右方向における外側)で支持していることから、車輪が接地すると、走行玩具の自重により車輪支持体はその軸線を中心に回動し、車輪支持体の上部が車体側に近接する。
その一方で、車輪支持体の上部と車体との間には緩衝体が介在するため、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
そして、上記のように、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すればその機能を果たすことが可能である。従って、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することができる。
【0006】
請求項2記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って移動調節可能に前記車体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節を行うに際して、これに対応するように、緩衝体を車体に対して前後方向に位置調節を行う。
【0007】
請求項3記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って車体に設けられた長尺な弾性体であることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体は前後方向に長尺であることから、車輪支持体の上部と緩衝体の一部が依然として対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0008】
請求項4記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って並んで車体に設けられた複数の弾性体からなることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、複数の緩衝体が前後方向に並んでいることから、車輪支持体の上部が別の緩衝体と対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0009】
請求項5記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、各車輪支持体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体が車輪支持体に設けられていることから、車輪支持体の上部は緩衝体を介して車体に当接する。その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【発明の効果】
【0010】
請求項1記載の発明は、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すれば相互間に発生する弾性力で車輪に緩衝効果を与えることができる。従って、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することが可能となる。
これにより、ホイルベースが異なる各種のボディカバーを車体に搭載することができ、異なるデザインのボディカバーでの走行を楽しむことができ、走行玩具の興趣性の向上を図ることが可能となる。
さらに、上述のように、車体の左右において、左右の車輪を前後方向に沿った軸線を中心に回動可能に支持された車輪支持体で支持する構成の場合、接地した左右の車輪は前方から見てハの字状を描くように互いに傾斜することとなる。
従って、上記車輪の支持構造を、特に操舵輪に適用した場合において、操舵操作等の外力を加えない状態では、左右の車輪を直進状態に維持することができ、走行安定性を向上することが可能となる。
【0011】
請求項2記載の発明は、緩衝体が車体側において前後方向に位置調節可能に支持されていることから、車輪の前後位置調節が行われた場合にあっても、これに対応するように緩衝体をスライド移動させるだけの操作で緩衝体の位置調節も完了し、車輪位置変更に伴う緩衝体の位置調整作業の簡易化、迅速化を図ることが可能となる。
【0012】
請求項3記載の発明は、緩衝体が、前後方向に沿って車体に設けられた長尺な弾性体であることから、緩衝体の長さが及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0013】
請求項4記載の発明は、複数の緩衝体が、前後方向に沿って車体に設けられていることから、複数の緩衝体の及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0014】
請求項5記載の発明は、緩衝体が回動支持部に設けられていることから、車輪の前後位置調節が行われた場合には、車輪および車輪支持体が前後方向に移動し、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【発明を実施するための最良の形態】
【0015】
(発明の実施形態の全体構成)
図1〜3は本発明の実施形態たる走行玩具100の平面図であり、図1は直進状態、図2は左折状態、図3は操舵輪を前方に移動調節した状態を示す。以下の説明において、直進前後方向をY軸方向、左右方向をX軸方向、上下方向をZ軸方向とし、これらは互いに直交するものとする。
図1〜3に示すように、走行玩具100は、駆動輪となる左右の後輪21L,21Rと、操舵輪となる左右の前輪22L,22Rと、各前輪22L,22Rを個別に支持する前輪支持機構30L,30Rと、各前輪22L,22Rに対して操舵を行う操舵機構60と、各後輪21L,21Rに走行トルクを付与する走行機構80と、走行機構80の駆動源たる走行用直流モータ4と操舵機構60の駆動源たる操舵用直流モータ13を駆動するモータ駆動回路と、モータ駆動回路の制御回路と、上述した各構成を格納保持する車体90とを備えている。
【0016】
(前輪支持機構)
図4は左側の前輪22Lを支持する前輪支持機構30Lの分解斜視図である。図1乃至図4に基づいて前輪支持機構30Lについて詳説する。なお、右前輪22Rの前輪支持機構30Rは前輪支持機構30LとY−Z平面を基準とする鏡面対称構造のため、説明は省略するものとする。また、以下に説明する前輪支持機構30Lの各構成に対応する前輪支持機構30Rの各構成については、前輪支持機構30Lの各構成に付した符号のLをRに替えて適宜記載するものとする。また、前輪支持機構30Lは車体90の左側面に設けられ、前輪支持機構30Rは右側面に設けられている。
【0017】
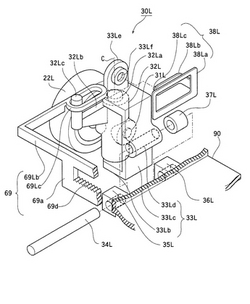
前輪支持機構30Lは、回転軸31Lを介して前輪22Lを回転可能に支持する操舵回転体32Lと、回転軸31Lと直交する方向を中心として操舵回転体32Lを回動可能に支持する車輪支持体33Lと、車体90の左側面下部において車輪支持体33Lを支持軸34Lにより軸支する回動支持部35L,36Lと、支持軸34Lに沿った所定の位置に車輪支持体33Lを保持するスペーサ37Lと、前輪22Lから車体90への振動を緩和する緩衝体としてのサスペンション部材38Lと、このサスペンション部材38Lを車体90側で保持するサスペンション保持部39Lとを備えている。
【0018】
上記車輪22Lはその中心に位置する回転軸31Lに対して回転可能であり、この回転軸31Lは操舵回転体32Lに保持されている。
操舵回転体32Lは略円柱状であり、当該円柱形状の中心線C方向(図4における上下方向)における中間の位置において当該中心線C方向に直交するように回転軸31Lを保持している。また、車体支持体32Lの中心線C方向における両端部にはそれぞれ当該中心線C方向に沿って突出した円形の突起32Laが形成されており(下側の突起は図示略)、これらの円形の突起32Laを介して操舵回転体32Lは車輪支持体33Lに支持されている。そして、各突起32Laは円形のため、操舵回転体32は中心線C方向を中心として車輪支持体33Lに対して回動を行うこと可能としている。
【0019】
さらに、操舵回転体32Lには、その円柱形状の半径方向に向かって延出された従動アーム部32Lbをその上端部に備えている。かかる従動アーム部32Lbの先端部には、中心線C方向と平行に丸棒状の係合突起32Lcが固設されている。かかる係合突起32Lcは、後述する操舵機構60の操舵アーム69により、操舵時においてX軸方向に沿ったいずれかの方向に押圧される。これにより、車輪支持体33Lに対して操舵回転体32Lが回動され、前輪22Lの進行方向が変更され、走行玩具100の操舵が行われるようになっている。なお、操舵アーム69は、左右の操舵回転体32L,32Rに対して同時に同方向に同じ変位で操舵を行うようになっている。
【0020】
ここで操舵機構60の操舵アーム69について先行して説明することにする。操舵アーム69は、車体90に設けられたガイド溝(図示略)に支持されてX軸方向に沿って往復移動動作を行うスライド平面部69aと、スライド平面部69aの長手方向両端部のそれぞれにおいて長手方向に向かって延出されると共に途中から垂直に屈曲形成された主動アーム部69Lb,69Rbと、各主動アーム部69Lb,69Rbの先端部に設けられた長穴を備える環状部69Lc,69Rcとを備えている。
上記スライド平面部69aは、長尺の板状であり、その平板面をX−Z平面に平行にさせた状態でX軸方向にスライド移動可能に車体90の図示しないガイド溝に支持されている。
また、スライド平面部69aには、その長手方向に沿った長穴が平板面の中央に穿設されており、長穴の下側の縁部に長手方向に沿ってラック歯69dが形成されている。かかるラック歯69dは、操舵機構60の操舵用直流モータ13がクラッチ機構63を介して回転駆動するピニオン歯車64と連結し、操舵時においてモータトルクを直動移動力に変換して操舵アーム69をX軸方向に沿っていずれかの方向に移動させる。
各主動アーム部69Lb,69Rbは、それぞれスライド平面部69aの両端部から長手方向を延長する方向に延設され、途中で垂直に同方向に屈曲されている。かかる屈曲方向は、スライド平面部69aの平板面に対して垂直な方向である。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各主動アーム部69Lb,69Rbの先端部はY軸方向に沿った状態となる。
環状部69Lc,69Rcは、主動アーム部69Lb,69Rbの先端部に沿って長穴が形成されている。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各環状部69Lc,69Rcの長穴もY軸方向に沿った状態となる。かかる各環状部69Lb,69Rbの長穴には、それぞれ各操舵回転体32L,32Rの係合突起32Lc,32Rcが挿入される。各係合突起32Lc,32RcはX軸方向に傾斜し得るので(後述)、各環状部69Lc,69Rcの長穴の短軸方向幅は係合突起32Lc,32Rcの直径よりも幾分広く設定されている。また、各前輪22L,22R及び操舵回転体32L,32Rは車輪支持体33L,33Rと共にY軸方向に沿ってその配置の調節が可能であり(後述)、これに対応するために、各環状部69Lc,69Rcの長穴の長軸方向長さはY軸方向の位置調整を網羅する長さに設定されている(図3参照)。
【0021】
図2は操舵アーム69による操舵が行われた状態を示している。操舵アーム69は、操舵用直流モータ13によりX軸方向のいずれか一方に移動され、各主動アーム部69Lb,69Rbから各従動アーム部32Lb,32Rbを介して操舵回転体32L,32Rを回動させ、各前輪22L,22Rを同方向に操舵することができる。例えば、操舵アーム69が右方に移動されれば各前輪22L,22Rは左折方向に操舵され、操舵アーム69が左方に移動されれば各前輪22L,22Rは右折方向に操舵される。
なお、操舵アーム69には、各前輪22L,22Rが直進方向を向く直進位置に復帰させる復帰バネ及び復帰バネにより復帰させる直進位置を調整する調整ツマミ(いずれも図示略)が車体内部において併設されている。これにより、操舵用直流モータ13への操舵制御が解除されたときに、自動的に直進走行状態に戻すことが可能となる。
【0022】
次に、車輪支持体33Lについて説明する。車輪支持体33は、操舵回転体32Lを中心線C方向を中心として回動可能に支持する。車輪支持体33Lは、操舵回転体32LのC方向両端部にそれぞれ対向する天板33La及び底板33Lbと、これら天板33La及び底板33Lbを連結する長尺の背面板33Lcとが一体的に形成されており、全体的には略コ字状となっている。即ち、背面板33Lcに対して垂直であって同じ方向に向かって天板33Laと底板33Lbとが延設されている。これら天板33La及び底板33Lbには、それぞれ操舵回転体32Lの両端部に設けられた突起32Laの受け穴(図示略)が形成されており、これにより車輪支持体33は、操舵回転体32Lを回動可能に支持している。
【0023】
そして、背面板33Lcの天板33La及び底板33Lbとは逆側の面における長手方向中間位置には、その平板面に平行であって長手方向に直交する方向に沿って支持軸34Lが挿通される係合穴33Ldが穿設されている。つまり、この係合穴33Ldに挿通された支持軸34Lを中心に、車体90に対して車輪支持体33L,操舵回転体32L及び前輪22Lが回動を行うことが可能となっている。
なお、支持軸34Lは、車体90の左側面下部において、所定の間隔を空けてY軸方向に沿って並んで固定装備されている二つの回動支持部35L,36Lにその両端部が保持される。従って、車輪支持体33LはY軸方向に沿って配設され支持軸34Lにより、同方向を中心として車体90に対して回動可能に支持されることとなる。
【0024】
ここで、二つの回動支持部35L,36Lの間隔は、車輪支持体33LのY軸方向幅よりも大きく設定されており、その余りスペースに筒状のスペーサ37Lが介挿されるようになっている。
【0025】
図1はスペーサ37Lを車輪支持体33Lの前側に配置した状態であり、図2はスペーサ37Lを車輪支持体33Lの後側に配置した状態である。
支持軸34Lは、車輪支持体33LをY軸方向に沿って移動させるガイドとして機能し、当該車輪支持体33LのY軸方向における位置調整を可能とする。
また、スペーサ37は、車輪支持体33Lの前側と後側のいずれかに選択的に配置することで、Y軸方向の調整位置に車輪支持体33Lを保持する保持手段として機能する。すなわち、スペーサ37Lの配置を変えることにより、回動支持部35L,36Lの間となる範囲内でY軸方向についてその位置を調整することが可能となっている。
このように、各車輪支持体33L,33RのY軸方向の配置が変えられることにより、車体90の上から各種のデザインを施した複数種の車体カバーを装着し、これらのホイルベースが異なる場合であっても、適宜、前輪22L,22Rの配置を適切に調整することが可能となる。
なお、スペーサ37Lについては、その配置を変えるだけでなく、その厚さの異なる複数種のものを用意し、車輪支持体33L,33Rの前後に組み合わせて使用したり、より厚さの薄いものを車輪支持体33L,33Rの前後に複数枚ずつ重ねて並べることで、車輪支持体33L,33R及び前輪22L,22RのY軸方向位置を調整しても良い。
また、車輪支持体33Lの係合穴33Ldの周囲やスペーサ37Lの穴の周囲は連続してつながっているが、穴の周囲の一部を切り欠いて断面C字状とし、且つこれら車輪支持体33L及びスペーサ37Lを可撓性を有する素材から形成しても良い。そのようにすることで、既に回動支持部35L,36Lに取り付けられた状態の支持軸34Lに対して、C字形状の欠損部を押し込むようにして車輪支持体33Lやスペーサ37Lを容易に装着することが可能となる。
【0026】
また、車輪支持体33Lの天板33Laの上面には、背面板33Lbの平板面と平行に対向板33Leが一定的に立設されている。この対向板33Leは、車体90に左側面に支持されたサスペンション部材38Lから車体90に対して反発する方向の弾性力が付与されるようになっており、車体90側の対向面上には、サスペンション部材38Lに設けられた半球状の突起38Lcを遊嵌する円形の凹部33Lfが形成されている。
【0027】
図5は、走行玩具100の正面図であり、図6及び図7はサスペンション部材38Lの要部平面図である。
サスペンション部材38Lは、サスペンション保持部39Lに支持される長方形の板状の基部38Laと、この基部38LaからY軸方向に沿って片持ち状態で延出された弾性素材からなる板バネ部38Lbと、板バネ部38Lbの延出先端部側に設けられた半球状の突起部38Lcとを備えている。かかるサスペンション部材38Lの突起部38Lcが、対向板33Leに設けられた円形の凹部33Lfに嵌った状態で、サスペンション部材38は、車輪支持体33に弾性力を付与している。
【0028】
図5に示すように、各前輪22L、22Rがそれぞれ接地すると、当該各前輪22L、22Rはそれぞれ支持軸34L、34Rよりも車体90の幅方向(X軸方向)について外側に位置しているため、走行玩具100の自重により車輪支持体33L、33Rは支持軸34L、34Rを中心としてその上部が車体90の側面に接近する方向に回動することとなる。
これにより、各前輪22L、22R及び車輪支持体33L、33Rは、正面方向から見て互いにハの字状に傾く状態となり、車輪支持体33L、33Rの上側に設けられた対向板33Le、33Reは、車体90の側面側に接近する方向に移動する。しかし、車体90の側面には当該側面に対して離間する方向に反発力を生じさせるサスペンション部材38L、38Rが設けられているため、車輪支持体33L、33Rは対向板33Le、33Reを介してサスペンション部材38L、38Rの弾性力をもって押し返されることとなる。これにより、左右の前輪22L、22Rをハの字状に互いに傾かせた状態を維持しつつも、各前輪22L、22Rが地面から受ける振動を、サスペンション部材38L、38Rで緩和し、車体90への緩衝効果を得ることができる。
また、操舵輪である前輪22L、22Rが互いに下広がりの状態で傾斜した状態を維持することから、外力が付与されていない状態(操舵機構60による操舵操作が行われてない状態)では、直進操舵状態を維持させることが可能となる。
【0029】
また、前述したように車輪支持体33L、33Rは、車体90に対して前後方向の位置調整が可能となっている。このため、サスペンション部材38L、38Rについても、車体90に対して前後方向に位置調整を可能とする必要がある。従って、図5及び図7に示すように、サスペンション保持部39L(39Rも同様)は、サスペンション部材38Lの長尺状の基部をY軸方向に沿ってスライド可能に支持している。これによりY軸方向に移動調節された車輪支持体33Lの対向板33Leに設けられた凹部33Lfに対して、サスペンション部材38Lを同様にY軸方向に移動調節し、その突起38Lcを凹部33Lfに嵌合させることが可能となっている。従って、車輪22L、22Rの前後位置調節が行われた場合であっても、一定の緩衝効果を維持することが可能となる。
【0030】
以上のように、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rの上部に設けられた対向板33Lf、33Rfに対向して車体90の側面側にサスペンション部材38L、38Rを配置している。このため、Y軸方向を中心に軸支された前輪22L、22R及び車輪支持体33L、33Rが下広がりにハの字状に互いに傾斜した状態で、サスペンション部材38L、38Rから弾性的な反発力の付与が行われ、路面状態により生じる振動や衝撃を車体90に対して緩衝することが可能となる。
【0031】
また、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rを支軸34L、34Rにより軸支すると共に当該支持軸34L、34Rに対して摺動可能とし、スペーサ37により位置決定を行う構成であることから、車体全体を伸縮させる構成と異なり、軽微な一部の構成のみでホイルベースの調整が可能となる。従って、調整を行う構成の簡易化、調整作業の容易化及び迅速化を図ることが可能となる。
【0032】
さらに、車輪支持体33L、33Rは、車体から分離して前後方向に移動調節が行われる構成であると共に、主に、前輪22L,22Rと操舵回転体32L,32Rのみを支持する部材であるため、小型が容易であり、当該車輪支持体33L、33Rの移動調節に際して、従来のように、車体に格納される各種の構成の配置やその機能を行わないようになされる配慮を不要とし、簡易な構成でホイルベースの調節を行うことが可能である。
また、車輪支持体33L、33Rの小型化・軽量化が容易であることから、車体90や車輪支持体33L、33Rに強度不足による歪みが生じにくく、良好な走行状態を維持することが可能となる。
【0033】
さらに、操舵機構60の操舵アーム69が長穴を備える環状部69Lc、69Rcのように、操舵回転体32L、32Rの前後位置変化を生じた場合でも左右方向に移動力を伝達可能な構造を備えることから、前輪22L、22Rの前後位置調節を妨げることはなく、且つ安定した操舵を行うことが可能である。
【0034】
また、サスペンション部材38L、38Rが、サスペンション保持部39L、39Rにより前後位置調節可能に支持されていることから、車輪支持体33L、33Rの前後位置変化を生じた場合でもこれらに対して車体90から離間する方向に弾性力を付与することができ、前輪22L、22Rの前後位置調節にかかわらず、安定した緩衝効果を得ることが可能である。
さらに、前輪22L、22Rの移動調整が行われてもサスペンション部材38L、38Rは煩雑な組み直し作業を不要とし、スライド操作のみにより容易に対処することができ、作業の簡易迅速化を図ることが可能となる。
【0035】
(前輪支持機構の変形例)
前述した操舵機構60にあっては、操舵アーム69にラック歯を形成し、操舵用直流モータ13で回転駆動されるピニオン歯車64により操舵アーム69をX軸方向に移動させる構成としたが、特にこれに限定されず、必要時に操舵アーム69に移動力を付与するいかなる方向を用いても良い。例えば、ソレノイドや直動モータのような電磁石と磁性体や永久磁石を用いた構成や、回転式のモータの出力軸の半径方向にアームを装備して、アームの回動により操舵アーム69を左右に移動させる構成でも良い。
【0036】
また、操舵アーム69と操舵回転体32L、32Rの係合部位は、長穴を有する環状部69Lc、69Rcと係合突起32Lc、32Rcとで連結しているが、これらは相互間に生じる相対的なY軸方向の移動を許容しながらX軸方向の移動については連動する構造であればいかなるものでも良い。例えば、長穴と丸棒状の突起を互いに逆側に設けても良いし、長穴に替えて溝を用いても良い。また、主動アーム又は従動アームの延設方向に沿って移動するスライダをいずれか一方に設け、他方とスライダとをZ軸方向を中心に回動可能に連結しても良い。
【0037】
また、前輪支持機構30L、30Rは、前述した構成に限らず、前輪22L、22Rの操舵に要する回動を可能としつつもY軸方向に移動調節を可能とするいかなる構成であっても良い。例えば、回動支持部35L、36Rを車体90に対してY軸方向に沿って移動可能に設け、支持軸34Lと共に車輪支持体33LをY軸方向に移動可能としても良いし、回動支持部35L、36Rを車体90に対してボスと嵌め穴のような凹凸構造で着脱可能とし、車体側面側にY軸方向に沿って複数の凹部又は凸部を設けることで回動支持部35L、36Rの位置調整を行っても良い。或いは、車輪支持体33Lには同軸上に少なくとも二以上のCリングを固設し、回動支持部35L、36LにはCリングの内径よりも大径の支持軸34Lを設け、当該支持軸34Lの外周面上にはその長手方向に沿ってCリングが回転可能に取付られる円周溝を複数設ける構成としても良い。この場合は、複数ある円周溝を選択してCリングにより車輪支持体33を取り付けることで、当該車輪支持体33をY軸方向に位置調整することが可能となる。
なお、前輪支持機構30Rについても同様である。
【0038】
また、前輪支持機構30L、30Rのサスペンション部材38L、38Rをサスペンション保持部39L、39RによりY軸方向に移動調節可能としたが、前輪22L、22Rの前後方向位置調節が行われても、その位置変化にかかわらず、前輪22L、22Rに弾性的に緩衝効果を付与するいかなる構成であっても良い。
例えば、サスペンション部材をY軸方向に沿って車体90に固定装備した長尺な弾性体としても良い。
或いは、複数のサスペンション部材をY軸方向に沿って並んで車体90に固定装備しても良い。
また或いは、各車輪支持体33L、33Rの対向板33Le、33Reに車体90の側面に当接する弾性体からなるサスペンション部材を設けても良い。
これらの場合、前輪22L、22Rの前後位置調節が行われた場合に、サスペンション部材の位置調節作業を行う必要がなく、車輪支持体33L、33Rはサスペンション部材により弾性力が付与され、前輪22L、22Rに対する緩衝効果を維持することができる。また、これらの場合、サスペンション保持部39を不要とすることが可能となる。
【0039】
(操舵機構)
車体90の前部にはモータ及び機構格納部61を備え、このモータ及び機構格納部61の内部にはモータ・機構格納室が設けられている。そして、モータ・機構格納室には操舵用直流モータ13が設置されている。また、車体90には、モータ・機構格納室の上側を閉塞するカバーが取外し自在に取り付けられている。なお、モータ格納室と機構格納室とを区画し、モータ格納室と機構格納室とを上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
【0040】
操舵用直流モータ13としては正転・逆転(正逆転)可能なモータが用いられている。操舵用直流モータ13は、モータケースから軸13aが車体90の後方に向けて突出するように、モータ・機構格納室に設置されている。図8(A),(B)に示すように、軸13aにはクラッチ機構63を介して歯車(ピニオン歯車)64が設けられている。クラッチ機構63は、円板(保持板)63a、クラッチ片63b及び外筒63cを含んで構成されている。すなわち、軸13aには円板63aが固定されている。この円板63aは特に限定はされないが円板状に構成されている。この円板63aの端面にはクラッチ片63bが複数設置されている。各クラッチ片63bは、軸13aの半径方向に動作自在となるように、円板63aに取り付けられている。すなわち、円板63aにはその回転中心からほぼ放射状に延びるガイド63dが形成され、このガイド63dに沿って各クラッチ片63bが軸13aの半径方向に動作自在となっている。各クラッチ片63dは外端側が少なくとも棒状に構成されている。そして、円板63aが回転した際に、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作するように構成されている。
一方、外筒63cは、円板63a及びクラッチ片63dを軸13aの半径方向外方から囲繞するような周壁を有している。そして、操舵用直流モータ13の動力によって円板63aが回転し、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作し、各クラッチ片63dが外筒63cの周壁内面に圧接されて、円板63aと外筒63cが一体的に回転されるようになっている。なお、円板63aが回転していない状態では、円板63aに対して外筒63cは空回り自在となっている。
【0041】
歯車64は、操舵アーム69に形成されたラック歯69aに噛合している。その結果、操舵用直流モータ13の動力によって歯車64が正方向又は逆方向に回転すると、その回転方向に応じて操舵アーム69は左右に動作することとなる。
【0042】
なお、この実施形態では、操舵アーム69を操舵用直流モータ13によって歯車機構を介して動作させるようにしたが、操舵アーム69を電磁石によって左右に動作させるように構成してもよい。すなわち、操舵アーム69に永久磁石又はコイルの一方を付設する一方で、車体90の固定部分に永久磁石又はコイルの他方を付設し、コイルの通電制御を行うことによって操舵アーム69を左右に動作させるように構成してもよい。
【0043】
(走行用直流モータ)
車体90の後部にはモータ及び機構格納部71を備え、このモータ及び機構格納部71の内部は図9に示すようにモータ格納室71aと機構格納室71bとに区画されている。そして、モータ格納室71aには走行用直流モータ4が設置されている。
走行用直流モータ4としては正転・逆転(正逆転)可能なモータが用いられている。走行用直流モータ4は、モータケースから軸4aが車体90の幅方向に向けて突出するように、モータ格納室71aに設置されている。軸4aには歯車(モータピニオン)81aが設けられている。歯車81aは、モータ格納室71aに走行用直流モータ4の本体を設置した際に機構格納室71bに臨むような位置に設けられている。走行用直流モータ4のモータケース4bには外周面に2つの端子4c,4dが設けられている。
一方、モータ格納室71aの床はプリント配線板74によって構成されている。プリント配線板74の表面には、前記した端子4b,4cに対応する場所に電極パターン74a,74bが形成されている。電極パターン74a,74bはプリント配線板74に印刷又は蒸着によって形成されている。
そして、プリント配線板74の上に走行用直流モータ4を載置した際に端子4c,4dと電極パターン74a,74bとが電気的に接続され、走行用直流モータ4に給電できるようにされている。
なお、プリント配線板74は平板状となっていてもよいし、上側に凹となるように湾曲していてもよい。要は、モータケースに対応した形状となっており、端子4c,4dと電極パターン74a,74bが確実に当接されればよい。
以上の構造を持つ走行玩具100によれば、電極パターン74a,74bを形成したプリント配線板74を使用しているので、走行玩具100の組立てが極めて容易となる。すなわち、プリント配線板74を使用しない場合には、車体側に電極板(導電板)を1枚1枚組み付けたり電気的接続するにあたって導線の半田付けを行うなどの細かい作業が必要となるのに対して、電極パターン74a,74bを形成したプリント配線板74を使用する場合には、組立てにあたってプリント配線板74を車体に組み付ければよいので、走行玩具100の組立て極めて容易となる。
また、導線を使用する場合には電気的接続にあたつて、配線を間違えたりする危険性があるが、端子が電極パターン74a,74bに当接することによって直ちに電気的接続がなされるので、その心配はない。
【0044】
(走行機構)
機構格納室71bには、走行用直流モータ4の走行トルクを各後輪21L,21Rに伝達するための走行機構80が設置されている。走行機構80は前記歯車81aを含む歯車機構81によって構成されている。
すなわち、機構格納室71bには軸4aに平行な軸82が延在している。図10に示すように、軸82には歯車81bが軸82に対して空回り自在に設けられている。歯車81bは軸82の軸線方向に移動自在に構成されている。そして、この歯車81bの左右位置には歯車81Lc,81Rcが一体的に設けられている。
また、機構格納室71bには軸82に平行な軸(後輪車軸)83が延在している。軸83には歯車81Ld,81Rdが固定して設けられている。この歯車81Ld,81Rdには、歯車81bが軸82の軸線方向に移動した際に、その移動方向に応じて歯車81Lc,81Rcが択一的に噛合するようになっている。具体的には、歯車81bが軸82の軸線方向左に動作した際には歯車81Lcが歯車81Ldに噛合し、一方、歯車81bが軸82の軸線方向右に動作した際には歯車81Rcが歯車81Rdに噛合するようになっている。そして、この歯車の噛合状態を変更することによって、走行トルクを変えることができる。
なお、歯車81bを軸82の軸線方向に移動させるために、車体90の下側には図示しない操作摘みが付設され、この操作摘みの操作によってレバー84を左右に移動させ、そのレバー84の2つの爪84a,84bに間に位置する歯車81bが左右に押されて歯車の噛合状態を変えられるようになっている。
【0045】
(カバー)
図9に示すように、車体90には、モータ格納室71a及び機構格納室71bの上側を閉塞するカバー91が着脱自在に取り付けられている。このカバー91はモータ押さえとして機能する。なお、モータ格納室71a及び機構格納室71bの上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
カバー91には放熱用開口91aが多数設けられている。また、カバー91には放熱板92を装着するためのスリット93が設けられている。そして、スリット93から放熱板92を着脱できるように構成されている。放熱板92としては金属、例えば銅やアルミニウムが好ましいが、放熱効果の高い形状を選択すれば合成樹脂(例えばABS樹脂)であってもよい。
以上の構造を持つ走行玩具100によれば、放熱板92の交換が簡単にでき、それによって放熱性能を簡単に変化させることができる。また、走行路の状況に応じて、重量の異なる放熱板92を使用することが可能となる。さらに、気分に応じて、色合いや形状の異なる放熱板92を使用することができる。このような種々の効果を有効に発揮させるためには、放熱性、重量、色合い、形状のいずれかが異なる複数の放熱板を用意しておき、そして、目的に合った放熱板をその中から選択して使用することが好ましい。
なお、一度に取り付ける放熱板92の数は1つに限定はされない。カバー91に2つ以上の放熱板92を取り付けられるような構造にしてもよい。
【0046】
(駆動回路及び制御回路)
走行玩具は、走行用直流モータおよび操舵用直流モータを搭載し、各直流モータの回転方向をリモコンからの電波で遠隔制御するように構成されている。
【0047】
図11に示すように、走行玩具内には、受信回路1と、制御IC2と、走行用直流モータ4を駆動する走行モータ駆動回路3と、操舵用直流モータ13を駆動する操舵モータ駆動回路8が内蔵されている。
【0048】
図示しないリモート操作装置から送信された操作信号電波は、アンテナANTを介して受信回路1で受信/復調され、制御IC2に入力される。制御IC2は、入力された操作信号に対応する制御命令信号を走行系及び/又は操舵系の制御駆動回路に送る。
【0049】
例えば、操作信号が前進命令であった場合、制御IC2は前進命令信号SFをモータ駆動回路3に出力する。走行モータ駆動回路3は、直流モータ4に対して前進方向に対応する極性の電圧を供給する。同様に、操作信号が後退命令であった場合、制御IC2は後退命令信号SBを走行モータ駆動回路3に出力する。走行モータ駆動回路3は直流モータ4に対して後退方向に対応する極性の電圧を供給する。
【0050】
一方、操作信号が操舵制御信号で右旋回命令であった場合、制御IC2は右旋回命令信号SRを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は、直流モータ13に対して右旋回方向に対応する極性の電圧を供給する。同様に、操作信号が左旋回命令であった場合、制御IC2は左旋回命令信号SLを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は直流モータ13に対して左旋回方向に対応する極性の電圧を供給する。
【0051】
操舵モータ駆動回路8は、少なくとも2個の電池9、10が直列に接続可能な正極電源端子14及び負極電源端子15を有している。
電源電圧Vccを供給する正極電源端子14とGND電位に接続される負極電源端子15との間には、制御IC2からの左旋回命令信号SL、右旋回命令信号SRによって交互に導通(ON)又は非導通(OFF)となるPNP形トランジスタ(第1スイッチ素子)Q5及びNPN形トランジスタ(第2スイッチ素子)Q6が直列に接続されている。
【0052】
電池9、10同士の接続中点16と、トランジスタQ5とトランジスタQ6との接続中点17と、の間に操舵用直流モータ13が接続されている。
操舵用直流モータ13の回転軸には、操舵輪(前輪)に連結された操舵機構60が連結されている。操舵用直流モータ13の回転方向を切換えることにより、この操舵機構60を介して操舵輪の向きを変更することができる。
【0053】
図12に示すように、電池9、10同士の接続中点には、投入時において操舵用直流モータ13の一側の接続端子及び電池9の負極側の端子16Aと電池10の正極側の端子16Bを電気的に接続する自己保持型の電源スイッチ18が設けられている。
この電源スイッチ18を投入することにより、電池9の負側と電池10の正側が電気的に接続され、かつ操舵用直流モータ13の一方の端子が電源スイッチ18に接続されるので直列接続された電池2個分の電源電圧Vcc(例、1.5V×2=3V)が各回路1,2,3,8、に供給され、また、操舵用直流モータ13の電機子の電流路が形成される。
なお、操舵モータ駆動回路8の両端に電源電圧Vcc(例、3V)が与えられるが、操舵用直流モータ13の各回転方向で操舵用直流モータ13に与えられるのは、電源電圧Vccの1/2(1.5V)である。その理由は、後述するループL1とループL2の単位で使用する電池が異なるからである。
【0054】
(回路動作)
まず、電源スイッチ18(図12)を投入すると、電池9と10とが負極側の端子16A及び正極側の端子16Bを介して直列に接続され、かつ操舵用直流モータ13が電池9と10との接続中点16(図11)に接続される。このとき、操舵モータ駆動回路8には二つの閉ループが形成される。
【0055】
図11に示すように、一つは、電池9⇒正極電源端子14⇒トランジスタQ5⇒接続中点17⇒操舵用直流モータ13⇒接続中点16⇒電池9のループL1である。
他の一つは、電池10⇒接続中点16⇒操舵用直流モータ13⇒接続中点17⇒トランジスタQ6⇒負極電源端子15⇒電池10のループL2である。
【0056】
いま、制御IC2から左旋回命令信号SL「電位L」が与えられたとすると、トランジスタQ5がONとなり、ループL1の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する左向きに回転する。一方、制御IC2から右旋回命令信号SR「電位H」が与えられたとすると、トランジスタQ6がONとなり、ループL1の場合とは逆向きのループL2の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する右向きに回転する。
【0057】
このように、トランジスタQ5とトランジスタQ6とは交互にON/OFF動作し、いわば相補的に動作する。そのON/OFF動作に伴って、操舵用直流モータ13に流れる電機子電流の向きが逆転し、走行玩具の進行方向を制御することができる。
【0058】
なお、複数の走行玩具100を同時に走行させる場合には、走行玩具100同士で動作周波数を変えることが行われるが、この場合、走行玩具側の動作周波数に合致したリモコンを選択して出荷することが必要となる。そこで、走行玩具100とそれに対応するリモコンとの組の選択を容易にするために、周波数動作周波数に応じてアンテナ用の導線の色を変えておくことが好ましい。
【図面の簡単な説明】
【0059】
【図1】本発明の実施形態たる走行玩具の直進状態の平面図である。
【図2】本発明の実施形態たる走行玩具の左折状態の平面図である。
【図3】本発明の実施形態たる走行玩具の操舵輪を前方に移動調節した状態の平面図である。
【図4】左側の前輪を支持する前輪支持機構の分解斜視図である。
【図5】走行玩具の正面図である。
【図6】サスペンション部材と車輪支持体の係合状態を示す要部平面図である。
【図7】サスペンション部材の位置調節を示す説明図である。
【図8】操舵用直流モータ及びクラッチ機構を示す説明図である。
【図9】走行用直流モータ及び走行機構を示す斜視図である。
【図10】走行機構を示す平面図である。
【図11】駆動回路を示す回路図である。
【図12】電源スイッチを示す回路図である。
【符号の説明】
【0060】
12 ステアリング機構
22L,22R 前輪(車輪)
30L、30R 前輪支持機構(車輪を支持する部材)
32L,32R 操舵回転体
32Lc,32Rc 係合突起
33L、33R 車輪支持体
34L、34R 支持軸(ガイド)
35L、36L、35R,36R 回動支持部(支持部)
37L、37R スペーサ(保持手段)
38L、38R サスペンション部材(緩衝体)
69 操舵アーム(操舵部材)
69Lc,69Rc 環状部
90 車体
100 走行玩具
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪の緩衝構造を備える走行玩具に関するものである。
【背景技術】
【0002】
従来の走行玩具は、車体の左右方向に延出され、その先端部で左右の走行輪をそれぞれ支持する上下に揺動可能な一対のサスペンションアームと、上下方向に伸縮可能であってその下端部を各サスペンションアームに連結されたコイルバネからなる左右ダンパーと、回動可能に車体に支持された二叉のリンク体を介して左右ダンパーの上端部同士を連結する中間ダンパーとを備えている(例えば、特許文献1参照)。
上記構成により、従来の走行玩具は、左右ダンパーの伸縮ストロークと中間ダンパーの伸縮ストロークとの合計となる長いストロークにより、より高い緩衝効果を得ることを可能としている。
【特許文献1】特開昭62−275488号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、走行車両の玩具は、車輪や駆動源を備える一つの車体に対して異なる複数のデザインのボディカバーを用意して交換可能とする場合があった。このような場合、ボディカバーによってホイルベースの長さに差異を生じることがあり、前輪の前後方向の位置調節が行われる。
しかしながら、上記従来の緩衝構造にあっては、車輪を支持する支軸に上下のダンパーを連結し、さらにリンク体を介して左右のダンパーと連結するという複雑な構成を採っている。従って、従来の緩衝構造では、前輪の位置調整時に対応するためには再度の組み直しが非常に煩雑となり、事実上、前輪位置調整が不可能となっていた。
本発明は、走行輪の前後方向の位置変更に際して、車輪の緩衝構造も容易に対応可能とすることを、その目的とする。
【課題を解決するための手段】
【0004】
請求項1記載の走行玩具は、車輪を回転可能に支持する左右一対の車輪支持体と、車体の左右の両側部に設けられ、各車輪支持体を前後方向に沿った軸線を中心に回動可能に支持する左右一対の回動支持部と、を備え、各車輪支持体が、回動支持部の軸線よりも外側で車輪を支持すると共に、各車輪支持体の回動支持部の軸線よりも上部に対して車体に反発する方向に弾性力を生じる緩衝体を備えることを特徴とする。
【0005】
上記走行玩具は、車体の側部に設けられた車輪支持体が車体の前後方向に沿った軸線を中心に回動可能であり、車輪支持体が車輪を回動支持部の軸線よりも外側(車体の左右方向における外側)で支持していることから、車輪が接地すると、走行玩具の自重により車輪支持体はその軸線を中心に回動し、車輪支持体の上部が車体側に近接する。
その一方で、車輪支持体の上部と車体との間には緩衝体が介在するため、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
そして、上記のように、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すればその機能を果たすことが可能である。従って、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することができる。
【0006】
請求項2記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って移動調節可能に前記車体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節を行うに際して、これに対応するように、緩衝体を車体に対して前後方向に位置調節を行う。
【0007】
請求項3記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って車体に設けられた長尺な弾性体であることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体は前後方向に長尺であることから、車輪支持体の上部と緩衝体の一部が依然として対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0008】
請求項4記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って並んで車体に設けられた複数の弾性体からなることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、複数の緩衝体が前後方向に並んでいることから、車輪支持体の上部が別の緩衝体と対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0009】
請求項5記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、各車輪支持体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体が車輪支持体に設けられていることから、車輪支持体の上部は緩衝体を介して車体に当接する。その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【発明の効果】
【0010】
請求項1記載の発明は、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すれば相互間に発生する弾性力で車輪に緩衝効果を与えることができる。従って、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することが可能となる。
これにより、ホイルベースが異なる各種のボディカバーを車体に搭載することができ、異なるデザインのボディカバーでの走行を楽しむことができ、走行玩具の興趣性の向上を図ることが可能となる。
さらに、上述のように、車体の左右において、左右の車輪を前後方向に沿った軸線を中心に回動可能に支持された車輪支持体で支持する構成の場合、接地した左右の車輪は前方から見てハの字状を描くように互いに傾斜することとなる。
従って、上記車輪の支持構造を、特に操舵輪に適用した場合において、操舵操作等の外力を加えない状態では、左右の車輪を直進状態に維持することができ、走行安定性を向上することが可能となる。
【0011】
請求項2記載の発明は、緩衝体が車体側において前後方向に位置調節可能に支持されていることから、車輪の前後位置調節が行われた場合にあっても、これに対応するように緩衝体をスライド移動させるだけの操作で緩衝体の位置調節も完了し、車輪位置変更に伴う緩衝体の位置調整作業の簡易化、迅速化を図ることが可能となる。
【0012】
請求項3記載の発明は、緩衝体が、前後方向に沿って車体に設けられた長尺な弾性体であることから、緩衝体の長さが及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変
更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0013】
請求項4記載の発明は、複数の緩衝体が、前後方向に沿って車体に設けられていることから、複数の緩衝体の及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0014】
請求項5記載の発明は、緩衝体が回動支持部に設けられていることから、車輪の前後位置調節が行われた場合には、車輪および車輪支持体が前後方向に移動し、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【発明を実施するための最良の形態】
【0015】
(発明の実施形態の全体構成)
図1〜3は本発明の実施形態たる走行玩具100の平面図であり、図1は直進状態、図2は左折状態、図3は操舵輪を前方に移動調節した状態を示す。以下の説明において、直進前後方向をY軸方向、左右方向をX軸方向、上下方向をZ軸方向とし、これらは互いに直交するものとする。
図1〜3に示すように、走行玩具100は、駆動輪となる左右の後輪21L,21Rと、操舵輪となる左右の前輪22L,22Rと、各前輪22L,22Rを個別に支持する前輪支持機構30L,30Rと、各前輪22L,22Rに対して操舵を行う操舵機構60と、各後輪21L,21Rに走行トルクを付与する走行機構80と、走行機構80の駆動源たる走行用直流モータ4と操舵機構60の駆動源たる操舵用直流モータ13を駆動するモータ駆動回路と、モータ駆動回路の制御回路と、上述した各構成を格納保持する車体90とを備えている。
【0016】
(前輪支持機構)
図4は左側の前輪22Lを支持する前輪支持機構30Lの分解斜視図である。図1乃至図4に基づいて前輪支持機構30Lについて詳説する。なお、右前輪22Rの前輪支持機構30Rは前輪支持機構30LとY−Z平面を基準とする鏡面対称構造のため、説明は省略するものとする。また、以下に説明する前輪支持機構30Lの各構成に対応する前輪支持機構30Rの各構成については、前輪支持機構30Lの各構成に付した符号のLをRに替えて適宜記載するものとする。また、前輪支持機構30Lは車体90の左側面に設けられ、前輪支持機構30Rは右側面に設けられている。
【0017】
前輪支持機構30Lは、回転軸31Lを介して前輪22Lを回転可能に支持する操舵回転体32Lと、回転軸31Lと直交する方向を中心として操舵回転体32Lを回動可能に支持する車輪支持体33Lと、車体90の左側面下部において車輪支持体33Lを支持軸34Lにより軸支する回動支持部35L,36Lと、支持軸34Lに沿った所定の位置に車輪支持体33Lを保持するスペーサ37Lと、前輪22Lから車体90への振動を緩和する緩衝体としてのサスペンション部材38Lと、このサスペンション部材38Lを車体90側で保持するサスペンション保持部39Lとを備えている。
【0018】
上記車輪22Lはその中心に位置する回転軸31Lに対して回転可能であり、この回転軸31Lは操舵回転体32Lに保持されている。
操舵回転体32Lは略円柱状であり、当該円柱形状の中心線C方向(図4における上下方向)における中間の位置において当該中心線C方向に直交するように回転軸31Lを保持している。また、車体支持体32Lの中心線C方向における両端部にはそれぞれ当該中心線C方向に沿って突出した円形の突起32Laが形成されており(下側の突起は図示略
)、これらの円形の突起32Laを介して操舵回転体32Lは車輪支持体33Lに支持されている。そして、各突起32Laは円形のため、操舵回転体32Lは中心線C方向を中心として車輪支持体33Lに対して回動を行うこと可能としている。
【0019】
さらに、操舵回転体32Lには、その円柱形状の半径方向に向かって延出された従動アーム部32Lbをその上端部に備えている。かかる従動アーム部32Lbの先端部には、中心線C方向と平行に丸棒状の係合突起32Lcが固設されている。かかる係合突起32Lcは、後述する操舵機構60の操舵アーム69により、操舵時においてX軸方向に沿ったいずれかの方向に押圧される。これにより、車輪支持体33Lに対して操舵回転体32Lが回動され、前輪22Lの進行方向が変更され、走行玩具100の操舵が行われるようになっている。なお、操舵アーム69は、左右の操舵回転体32L,32Rに対して同時に同方向に同じ変位で操舵を行うようになっている。
【0020】
ここで操舵機構60の操舵アーム69について先行して説明することにする。操舵アーム69は、車体90に設けられたガイド溝(図示略)に支持されてX軸方向に沿って往復移動動作を行うスライド平面部69aと、スライド平面部69aの長手方向両端部のそれぞれにおいて長手方向に向かって延出されると共に途中から垂直に屈曲形成された主動アーム部69Lb,69Rbと、各主動アーム部69Lb,69Rbの先端部に設けられた長穴を備える環状部69Lc,69Rcとを備えている。
上記スライド平面部69aは、長尺の板状であり、その平板面をX−Z平面に平行にさせた状態でX軸方向にスライド移動可能に車体90の図示しないガイド溝に支持されている。
また、スライド平面部69aには、その長手方向に沿った長穴が平板面の中央に穿設されており、長穴の下側の縁部に長手方向に沿ってラック歯69dが形成されている。かかるラック歯69dは、操舵機構60の操舵用直流モータ13がクラッチ機構63を介して回転駆動するピニオン歯車64と連結し、操舵時においてモータトルクを直動移動力に変換して操舵アーム69をX軸方向に沿っていずれかの方向に移動させる。
各主動アーム部69Lb,69Rbは、それぞれスライド平面部69aの両端部から長手方向を延長する方向に延設され、途中で垂直に同方向に屈曲されている。かかる屈曲方向は、スライド平面部69aの平板面に対して垂直な方向である。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各主動アーム部69Lb,69Rbの先端部はY軸方向に沿った状態となる。
環状部69Lc,69Rcは、主動アーム部69Lb,69Rbの先端部に沿って長穴が形成されている。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各環状部69Lc,69Rcの長穴もY軸方向に沿った状態となる。かかる各環状部69Lb,69Rbの長穴には、それぞれ各操舵回転体32L,32Rの係合突起32Lc,32Rcが挿入される。各係合突起32Lc,32RcはX軸方向に傾斜し得るので(後述)、各環状部69Lc,69Rcの長穴の短軸方向幅は係合突起32Lc,32Rcの直径よりも幾分広く設定されている。また、各前輪22L,22R及び操舵回転体32L,32Rは車輪支持体33L,33Rと共にY軸方向に沿ってその配置の調節が可能であり(後述)、これに対応するために、各環状部69Lc,69Rcの長穴の長軸方向長さはY軸方向の位置調整を網羅する長さに設定されている(図3参照)。
【0021】
図2は操舵アーム69による操舵が行われた状態を示している。操舵アーム69は、操舵用直流モータ13によりX軸方向のいずれか一方に移動され、各主動アーム部69Lb,69Rbから各従動アーム部32Lb,32Rbを介して操舵回転体32L,32Rを回動させ、各前輪22L,22Rを同方向に操舵することができる。例えば、操舵アーム69が右方に移動されれば各前輪22L,22Rは左折方向に操舵され、操舵アーム69が左方に移動されれば各前輪22L,22Rは右折方向に操舵される。
なお、操舵アーム69には、各前輪22L,22Rが直進方向を向く直進位置に復帰させる復帰バネ及び復帰バネにより復帰させる直進位置を調整する調整ツマミ(いずれも図示略)が車体内部において併設されている。これにより、操舵用直流モータ13への操舵制御が解除されたときに、自動的に直進走行状態に戻すことが可能となる。
【0022】
次に、車輪支持体33Lについて説明する。車輪支持体33Lは、操舵回転体32Lを中心線C方向を中心として回動可能に支持する。車輪支持体33Lは、操舵回転体32LのC方向両端部にそれぞれ対向する天板33La及び底板33Lbと、これら天板33La及び底板33Lbを連結する長尺の背面板33Lcとが一体的に形成されており、全体的には略コ字状となっている。即ち、背面板33Lcに対して垂直であって同じ方向に向かって天板33Laと底板33Lbとが延設されている。これら天板33La及び底板33Lbには、それぞれ操舵回転体32Lの両端部に設けられた突起32Laの受け穴(図示略)が形成されており、これにより車輪支持体33は、操舵回転体32Lを回動可能に支持している。
【0023】
そして、背面板33Lcの天板33La及び底板33Lbとは逆側の面における長手方向中間位置には、その平板面に平行であって長手方向に直交する方向に沿って支持軸34Lが挿通される係合穴33Ldが穿設されている。つまり、この係合穴33Ldに挿通された支持軸34Lを中心に、車体90に対して車輪支持体33L,操舵回転体32L及び前輪22Lが回動を行うことが可能となっている。
なお、支持軸34Lは、車体90の左側面下部において、所定の間隔を空けてY軸方向に沿って並んで固定装備されている二つの回動支持部35L,36Lにその両端部が保持される。従って、車輪支持体33LはY軸方向に沿って配設された支持軸34Lにより、同方向を中心として車体90に対して回動可能に支持されることとなる。
【0024】
ここで、二つの回動支持部35L,36Lの間隔は、車輪支持体33LのY軸方向幅よりも大きく設定されており、その余りスペースに筒状のスペーサ37Lが介挿されるようになっている。
【0025】
図1はスペーサ37Lを車輪支持体33Lの前側に配置した状態であり、図2はスペーサ37Lを車輪支持体33Lの後側に配置した状態である。
支持軸34Lは、車輪支持体33LをY軸方向に沿って移動させるガイドとして機能し、当該車輪支持体33LのY軸方向における位置調整を可能とする。
また、スペーサ37は、車輪支持体33Lの前側と後側のいずれかに選択的に配置することで、Y軸方向の調整位置に車輪支持体33Lを保持する保持手段として機能する。すなわち、スペーサ37Lの配置を変えることにより、回動支持部35L,36Lの間となる範囲内でY軸方向についてその位置を調整することが可能となっている。
このように、各車輪支持体33L,33RのY軸方向の配置が変えられることにより、車体90の上から各種のデザインを施した複数種の車体カバーを装着し、これらのホイルベースが異なる場合であっても、適宜、前輪22L,22Rの配置を適切に調整することが可能となる。
なお、スペーサ37Lについては、その配置を変えるだけでなく、その厚さの異なる複数種のものを用意し、車輪支持体33L,33Rの前後に組み合わせて使用したり、より厚さの薄いものを車輪支持体33L,33Rの前後に複数枚ずつ重ねて並べることで、車輪支持体33L,33R及び前輪22L,22RのY軸方向位置を調整しても良い。
また、車輪支持体33Lの係合穴33Ldの周囲やスペーサ37Lの穴の周囲は連続してつながっているが、穴の周囲の一部を切り欠いて断面C字状とし、且つこれら車輪支持体33L及びスペーサ37Lを可撓性を有する素材から形成しても良い。そのようにすることで、既に回動支持部35L,36Lに取り付けられた状態の支持軸34Lに対して、C字形状の欠損部を押し込むようにして車輪支持体33Lやスペーサ37Lを容易に装着
することが可能となる。
【0026】
また、車輪支持体33Lの天板33Laの上面には、背面板33Lbの平板面と平行に対向板33Leが一定的に立設されている。この対向板33Leは、車体90に左側面に支持されたサスペンション部材38Lから車体90に対して反発する方向の弾性力が付与されるようになっており、車体90側の対向面上には、サスペンション部材38Lに設けられた半球状の突起38Lcを遊嵌する円形の凹部33Lfが形成されている。
【0027】
図5は、走行玩具100の正面図であり、図6及び図7はサスペンション部材38Lの要部平面図である。
サスペンション部材38Lは、サスペンション保持部39Lに支持される長方形の板状の基部38Laと、この基部38LaからY軸方向に沿って片持ち状態で延出された弾性素材からなる板バネ部38Lbと、板バネ部38Lbの延出先端部側に設けられた半球状の突起部38Lcとを備えている。かかるサスペンション部材38Lの突起部38Lcが、対向板33Leに設けられた円形の凹部33Lfに嵌った状態で、サスペンション部材38は、車輪支持体33に弾性力を付与している。
【0028】
図5に示すように、各前輪22L、22Rがそれぞれ接地すると、当該各前輪22L、22Rはそれぞれ支持軸34L、34Rよりも車体90の幅方向(X軸方向)について外側に位置しているため、走行玩具100の自重により車輪支持体33L、33Rは支持軸34L、34Rを中心としてその上部が車体90の側面に接近する方向に回動することとなる。
これにより、各前輪22L、22R及び車輪支持体33L、33Rは、正面方向から見て互いにハの字状に傾く状態となり、車輪支持体33L、33Rの上側に設けられた対向板33Le、33Reは、車体90の側面側に接近する方向に移動する。しかし、車体90の側面には当該側面に対して離間する方向に反発力を生じさせるサスペンション部材38L、38Rが設けられているため、車輪支持体33L、33Rは対向板33Le、33Reを介してサスペンション部材38L、38Rの弾性力をもって押し返されることとなる。これにより、左右の前輪22L、22Rをハの字状に互いに傾かせた状態を維持しつつも、各前輪22L、22Rが地面から受ける振動を、サスペンション部材38L、38Rで緩和し、車体90への緩衝効果を得ることができる。
また、操舵輪である前輪22L、22Rが互いに下広がりの状態で傾斜した状態を維持することから、外力が付与されていない状態(操舵機構60による操舵操作が行われてない状態)では、直進操舵状態を維持させることが可能となる。
【0029】
また、前述したように車輪支持体33L、33Rは、車体90に対して前後方向の位置調整が可能となっている。このため、サスペンション部材38L、38Rについても、車体90に対して前後方向に位置調整を可能とする必要がある。従って、図5及び図7に示すように、サスペンション保持部39L(39Rも同様)は、サスペンション部材38Lの長尺状の基部をY軸方向に沿ってスライド可能に支持している。これによりY軸方向に移動調節された車輪支持体33Lの対向板33Leに設けられた凹部33Lfに対して、サスペンション部材38Lを同様にY軸方向に移動調節し、その突起38Lcを凹部33Lfに嵌合させることが可能となっている。従って、車輪22L、22Rの前後位置調節が行われた場合であっても、一定の緩衝効果を維持することが可能となる。
【0030】
以上のように、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rの上部に設けられた対向板33Lf、33Rfに対向して車体90の側面側にサスペンション部材38L、38Rを配置している。このため、Y軸方向を中心に軸支された前輪22L、22R及び車輪支持体33L、33Rが下広がりにハの字状に互いに傾斜した状態で、サスペンション部材38L、38Rから弾性的な反発力の付与が行われ、路面状態により生
じる振動や衝撃を車体90に対して緩衝することが可能となる。
【0031】
また、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rを支軸34L、34Rにより軸支すると共に当該支持軸34L、34Rに対して摺動可能とし、スペーサ37L、37Rにより位置決定を行う構成であることから、車体全体を伸縮させる構成と異なり、軽微な一部の構成のみでホイルベースの調整が可能となる。従って、調整を行う構成の簡易化、調整作業の容易化及び迅速化を図ることが可能となる。
【0032】
さらに、車輪支持体33L、33Rは、車体から分離して前後方向に移動調節が行われる構成であると共に、主に、前輪22L,22Rと操舵回転体32L,32Rのみを支持する部材であるため、小型が容易であり、当該車輪支持体33L、33Rの移動調節に際して、従来のように、車体に格納される各種の構成の配置やその機能を行わないようになされる配慮を不要とし、簡易な構成でホイルベースの調節を行うことが可能である。
また、車輪支持体33L、33Rの小型化・軽量化が容易であることから、車体90や車輪支持体33L、33Rに強度不足による歪みが生じにくく、良好な走行状態を維持することが可能となる。
【0033】
さらに、操舵機構60の操舵アーム69が長穴を備える環状部69Lc、69Rcのように、操舵回転体32L、32Rの前後位置変化を生じた場合でも左右方向に移動力を伝達可能な構造を備えることから、前輪22L、22Rの前後位置調節を妨げることはなく、且つ安定した操舵を行うことが可能である。
【0034】
また、サスペンション部材38L、38Rが、サスペンション保持部39L、39Rにより前後位置調節可能に支持されていることから、車輪支持体33L、33Rの前後位置変化を生じた場合でもこれらに対して車体90から離間する方向に弾性力を付与することができ、前輪22L、22Rの前後位置調節にかかわらず、安定した緩衝効果を得ることが可能である。
さらに、前輪22L、22Rの移動調整が行われてもサスペンション部材38L、38Rは煩雑な組み直し作業を不要とし、スライド操作のみにより容易に対処することができ、作業の簡易迅速化を図ることが可能となる。
【0035】
(前輪支持機構の変形例)
前述した操舵機構60にあっては、操舵アーム69にラック歯を形成し、操舵用直流モータ13で回転駆動されるピニオン歯車64により操舵アーム69をX軸方向に移動させる構成としたが、特にこれに限定されず、必要時に操舵アーム69に移動力を付与するいかなる方法を用いても良い。例えば、ソレノイドや直動モータのような電磁石と磁性体や永久磁石を用いた構成や、回転式のモータの出力軸の半径方向にアームを装備して、アームの回動により操舵アーム69を左右に移動させる構成でも良い。
【0036】
また、操舵アーム69と操舵回転体32L、32Rの係合部位は、長穴を有する環状部69Lc、69Rcと係合突起32Lc、32Rcとで連結しているが、これらは相互間に生じる相対的なY軸方向の移動を許容しながらX軸方向の移動については連動する構造であればいかなるものでも良い。例えば、長穴と丸棒状の突起を互いに逆側に設けても良いし、長穴に替えて溝を用いても良い。また、主動アーム又は従動アームの延設方向に沿って移動するスライダをいずれか一方に設け、他方とスライダとをZ軸方向を中心に回動可能に連結しても良い。
【0037】
また、前輪支持機構30L、30Rは、前述した構成に限らず、前輪22L、22Rの操舵に要する回動を可能としつつもY軸方向に移動調節を可能とするいかなる構成であっても良い。例えば、回動支持部35L、36Rを車体90に対してY軸方向に沿って移動
可能に設け、支持軸34Lと共に車輪支持体33LをY軸方向に移動可能としても良いし、回動支持部35L、36Rを車体90に対してボスと嵌め穴のような凹凸構造で着脱可能とし、車体側面側にY軸方向に沿って複数の凹部又は凸部を設けることで回動支持部35L、36Rの位置調整を行っても良い。或いは、車輪支持体33Lには同軸上に少なくとも二以上のCリングを固設し、回動支持部35L、36LにはCリングの内径よりも大径の支持軸34Lを設け、当該支持軸34Lの外周面上にはその長手方向に沿ってCリングが回転可能に取付られる円周溝を複数設ける構成としても良い。この場合は、複数ある円周溝を選択してCリングにより車輪支持体33を取り付けることで、当該車輪支持体33をY軸方向に位置調整することが可能となる。
なお、前輪支持機構30Rについても同様である。
【0038】
また、前輪支持機構30L、30Rのサスペンション部材38L、38Rをサスペンション保持部39L、39RによりY軸方向に移動調節可能としたが、前輪22L、22Rの前後方向位置調節が行われても、その位置変化にかかわらず、前輪22L、22Rに弾性的に緩衝効果を付与するいかなる構成であっても良い。
例えば、サスペンション部材をY軸方向に沿って車体90に固定装備した長尺な弾性体としても良い。
或いは、複数のサスペンション部材をY軸方向に沿って並んで車体90に固定装備しても良い。
また或いは、各車輪支持体33L、33Rの対向板33Le、33Reに車体90の側面に当接する弾性体からなるサスペンション部材を設けても良い。
これらの場合、前輪22L、22Rの前後位置調節が行われた場合に、サスペンション部材の位置調節作業を行う必要がなく、車輪支持体33L、33Rはサスペンション部材により弾性力が付与され、前輪22L、22Rに対する緩衝効果を維持することができる。また、これらの場合、サスペンション保持部39を不要とすることが可能となる。
【0039】
(操舵機構)
車体90の前部にはモータ及び機構格納部61を備え、このモータ及び機構格納部61の内部にはモータ・機構格納室が設けられている。そして、モータ・機構格納室には操舵用直流モータ13が設置されている。また、車体90には、モータ・機構格納室の上側を閉塞するカバーが取外し自在に取り付けられている。なお、モータ格納室と機構格納室とを区画し、モータ格納室と機構格納室とを上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
【0040】
操舵用直流モータ13としては正転・逆転(正逆転)可能なモータが用いられている。操舵用直流モータ13は、モータケースから軸13aが車体90の後方に向けて突出するように、モータ・機構格納室に設置されている。図8(A),(B)に示すように、軸13aにはクラッチ機構63を介して歯車(ピニオン歯車)64が設けられている。クラッチ機構63は、円板(保持板)63a、クラッチ片63b及び外筒63cを含んで構成されている。すなわち、軸13aには円板63aが固定されている。この円板63aは特に限定はされないが円板状に構成されている。この円板63aの端面にはクラッチ片63bが複数設置されている。各クラッチ片63bは、軸13aの半径方向に動作自在となるように、円板63aに取り付けられている。すなわち、円板63aにはその回転中心からほぼ放射状に延びるガイド63dが形成され、このガイド63dに沿って各クラッチ片63bが軸13aの半径方向に動作自在となっている。各クラッチ片63dは外端側が少なくとも棒状に構成されている。そして、円板63aが回転した際に、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作するように構成されている。
一方、外筒63cは、円板63a及びクラッチ片63dを軸13aの半径方向外方から囲繞するような周壁を有している。そして、操舵用直流モータ13の動力によって円板6
3aが回転し、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作し、各クラッチ片63dが外筒63cの周壁内面に圧接されて、円板63aと外筒63cが一体的に回転されるようになっている。なお、円板63aが回転していない状態では、円板63aに対して外筒63cは空回り自在となっている。
【0041】
歯車64は、操舵アーム69に形成されたラック歯69aに噛合している。その結果、操舵用直流モータ13の動力によって歯車64が正方向又は逆方向に回転すると、その回転方向に応じて操舵アーム69は左右に動作することとなる。
【0042】
なお、この実施形態では、操舵アーム69を操舵用直流モータ13によって歯車機構を介して動作させるようにしたが、操舵アーム69を電磁石によって左右に動作させるように構成してもよい。すなわち、操舵アーム69に永久磁石又はコイルの一方を付設する一方で、車体90の固定部分に永久磁石又はコイルの他方を付設し、コイルの通電制御を行うことによって操舵アーム69を左右に動作させるように構成してもよい。
【0043】
(走行用直流モータ)
車体90の後部にはモータ及び機構格納部71を備え、このモータ及び機構格納部71の内部は図9に示すようにモータ格納室71aと機構格納室71bとに区画されている。そして、モータ格納室71aには走行用直流モータ4が設置されている。
走行用直流モータ4としては正転・逆転(正逆転)可能なモータが用いられている。走行用直流モータ4は、モータケースから軸4aが車体90の幅方向に向けて突出するように、モータ格納室71aに設置されている。軸4aには歯車(モータピニオン)81aが設けられている。歯車81aは、モータ格納室71aに走行用直流モータ4の本体を設置した際に機構格納室71bに臨むような位置に設けられている。走行用直流モータ4のモータケース4bには外周面に2つの端子4c,4dが設けられている。
一方、モータ格納室71aの床はプリント配線板74によって構成されている。プリント配線板74の表面には、前記した端子4b,4cに対応する場所に電極パターン74a,74bが形成されている。電極パターン74a,74bはプリント配線板74に印刷又は蒸着によって形成されている。
そして、プリント配線板74の上に走行用直流モータ4を載置した際に端子4c,4dと電極パターン74a,74bとが電気的に接続され、走行用直流モータ4に給電できるようにされている。
なお、プリント配線板74は平板状となっていてもよいし、上側に凹となるように湾曲していてもよい。要は、モータケースに対応した形状となっており、端子4c,4dと電極パターン74a,74bが確実に当接されればよい。
以上の構造を持つ走行玩具100によれば、電極パターン74a,74bを形成したプリント配線板74を使用しているので、走行玩具100の組立てが極めて容易となる。すなわち、プリント配線板74を使用しない場合には、車体側に電極板(導電板)を1枚1枚組み付けたり電気的接続するにあたって導線の半田付けを行うなどの細かい作業が必要となるのに対して、電極パターン74a,74bを形成したプリント配線板74を使用する場合には、組立てにあたってプリント配線板74を車体に組み付ければよいので、走行玩具100の組立て極めて容易となる。
また、導線を使用する場合には電気的接続にあたつて、配線を間違えたりする危険性があるが、端子が電極パターン74a,74bに当接することによって直ちに電気的接続がなされるので、その心配はない。
【0044】
(走行機構)
機構格納室71bには、走行用直流モータ4の走行トルクを各後輪21L,21Rに伝達するための走行機構80が設置されている。走行機構80は前記歯車81aを含む歯車
機構81によって構成されている。
すなわち、機構格納室71bには軸4aに平行な軸82が延在している。図10に示すように、軸82には歯車81bが軸82に対して空回り自在に設けられている。歯車81bは軸82の軸線方向に移動自在に構成されている。そして、この歯車81bの左右位置には歯車81Lc,81Rcが一体的に設けられている。
また、機構格納室71bには軸82に平行な軸(後輪車軸)83が延在している。軸83には歯車82Ld,82Rdが固定して設けられている。この歯車82Ld,82Rdには、歯車81bが軸82の軸線方向に移動した際に、その移動方向に応じて歯車81Lc,81Rcが択一的に噛合するようになっている。具体的には、歯車81bが軸82の軸線方向左に動作した際には歯車81Lcが歯車82Ldに噛合し、一方、歯車81bが軸82の軸線方向右に動作した際には歯車81Rcが歯車82Rdに噛合するようになっている。そして、この歯車の噛合状態を変更することによって、走行トルクを変えることができる。
なお、歯車81bを軸82の軸線方向に移動させるために、車体90の下側には図示しない操作摘みが付設され、この操作摘みの操作によってレバー84を左右に移動させ、そのレバー84の2つの爪84a,84bに間に位置する歯車81bが左右に押されて歯車の噛合状態を変えられるようになっている。
【0045】
(カバー)
図9に示すように、車体90には、モータ格納室71a及び機構格納室71bの上側を閉塞するカバー91が着脱自在に取り付けられている。このカバー91はモータ押さえとして機能する。なお、モータ格納室71a及び機構格納室71bの上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
カバー91には放熱用開口91aが多数設けられている。また、カバー91には放熱板92を装着するためのスリット93が設けられている。そして、スリット93から放熱板92を着脱できるように構成されている。放熱板92としては金属、例えば銅やアルミニウムが好ましいが、放熱効果の高い形状を選択すれば合成樹脂(例えばABS樹脂)であってもよい。
以上の構造を持つ走行玩具100によれば、放熱板92の交換が簡単にでき、それによって放熱性能を簡単に変化させることができる。また、走行路の状況に応じて、重量の異なる放熱板92を使用することが可能となる。さらに、気分に応じて、色合いや形状の異なる放熱板92を使用することができる。このような種々の効果を有効に発揮させるためには、放熱性、重量、色合い、形状のいずれかが異なる複数の放熱板を用意しておき、そして、目的に合った放熱板をその中から選択して使用することが好ましい。
なお、一度に取り付ける放熱板92の数は1つに限定はされない。カバー91に2つ以上の放熱板92を取り付けられるような構造にしてもよい。
【0046】
(駆動回路及び制御回路)
走行玩具は、走行用直流モータおよび操舵用直流モータを搭載し、各直流モータの回転方向をリモコンからの電波で遠隔制御するように構成されている。
【0047】
図11に示すように、走行玩具内には、受信回路1と、制御IC2と、走行用直流モータ4を駆動する走行モータ駆動回路3と、操舵用直流モータ13を駆動する操舵モータ駆動回路8が内蔵されている。
【0048】
図示しないリモート操作装置から送信された操作信号電波は、アンテナANTを介して受信回路1で受信/復調され、制御IC2に入力される。制御IC2は、入力された操作信号に対応する制御命令信号を走行系及び/又は操舵系の制御駆動回路に送る。
【0049】
例えば、操作信号が前進命令であった場合、制御IC2は前進命令信号SFをモータ駆
動回路3に出力する。走行モータ駆動回路3は、直流モータ4に対して前進方向に対応する極性の電圧を供給する。同様に、操作信号が後退命令であった場合、制御IC2は後退命令信号SBを走行モータ駆動回路3に出力する。走行モータ駆動回路3は直流モータ4に対して後退方向に対応する極性の電圧を供給する。
【0050】
一方、操作信号が操舵制御信号で右旋回命令であった場合、制御IC2は右旋回命令信号SRを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は、直流モータ13に対して右旋回方向に対応する極性の電圧を供給する。同様に、操作信号が左旋回命令であった場合、制御IC2は左旋回命令信号SLを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は直流モータ13に対して左旋回方向に対応する極性の電圧を供給する。
【0051】
操舵モータ駆動回路8は、少なくとも2個の電池9、10が直列に接続可能な正極電源端子14及び負極電源端子15を有している。
電源電圧Vccを供給する正極電源端子14とGND電位に接続される負極電源端子15との間には、制御IC2からの左旋回命令信号SL、右旋回命令信号SRによって交互に導通(ON)又は非導通(OFF)となるPNP形トランジスタ(第1スイッチ素子)Q5及びNPN形トランジスタ(第2スイッチ素子)Q6が直列に接続されている。
【0052】
電池9、10同士の接続中点16と、トランジスタQ5とトランジスタQ6との接続中点17と、の間に操舵用直流モータ13が接続されている。
操舵用直流モータ13の回転軸には、操舵輪(前輪)に連結された操舵機構60が連結されている。操舵用直流モータ13の回転方向を切換えることにより、この操舵機構60を介して操舵輪の向きを変更することができる。
【0053】
図12に示すように、電池9、10同士の接続中点には、投入時において操舵用直流モータ13の一側の接続端子及び電池9の負極側の端子16Aと電池10の正極側の端子16Bを電気的に接続する自己保持型の電源スイッチ18が設けられている。
この電源スイッチ18を投入することにより、電池9の負側と電池10の正側が電気的に接続され、かつ操舵用直流モータ13の一方の端子が電源スイッチ18に接続されるので直列接続された電池2個分の電源電圧Vcc(例、1.5V×2=3V)が各回路1,2,3,8、に供給され、また、操舵用直流モータ13の電機子の電流路が形成される。
なお、操舵モータ駆動回路8の両端に電源電圧Vcc(例、3V)が与えられるが、操舵用直流モータ13の各回転方向で操舵用直流モータ13に与えられるのは、電源電圧Vccの1/2(1.5V)である。その理由は、後述するループL1とループL2の単位で使用する電池が異なるからである。
【0054】
(回路動作)
まず、電源スイッチ18(図12)を投入すると、電池9と10とが負極側の端子16A及び正極側の端子16Bを介して直列に接続され、かつ操舵用直流モータ13が電池9と10との接続中点16(図11)に接続される。このとき、操舵モータ駆動回路8には二つの閉ループが形成される。
【0055】
図11に示すように、一つは、電池9⇒正極電源端子14⇒トランジスタQ5⇒接続中点17⇒操舵用直流モータ13⇒接続中点16⇒電池9のループL1である。
他の一つは、電池10⇒接続中点16⇒操舵用直流モータ13⇒接続中点17⇒トランジスタQ6⇒負極電源端子15⇒電池10のループL2である。
【0056】
いま、制御IC2から左旋回命令信号SL「電位L」が与えられたとすると、トランジスタQ5がONとなり、ループL1の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する左向きに回転する。一方、制御IC2から右旋回命令信号SR「電位H
」が与えられたとすると、トランジスタQ6がONとなり、ループL1の場合とは逆向きのループL2の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する右向きに回転する。
【0057】
このように、トランジスタQ5とトランジスタQ6とは交互にON/OFF動作し、いわば相補的に動作する。そのON/OFF動作に伴って、操舵用直流モータ13に流れる電機子電流の向きが逆転し、走行玩具の進行方向を制御することができる。
【0058】
なお、複数の走行玩具100を同時に走行させる場合には、走行玩具100同士で動作周波数を変えることが行われるが、この場合、走行玩具側の動作周波数に合致したリモコンを選択して出荷することが必要となる。そこで、走行玩具100とそれに対応するリモコンとの組の選択を容易にするために、周波数動作周波数に応じてアンテナ用の導線の色を変えておくことが好ましい。
【図面の簡単な説明】
【0059】
【図1】本発明の実施形態たる走行玩具の直進状態の平面図である。
【図2】本発明の実施形態たる走行玩具の左折状態の平面図である。
【図3】本発明の実施形態たる走行玩具の操舵輪を前方に移動調節した状態の平面図である。
【図4】左側の前輪を支持する前輪支持機構の分解斜視図である。
【図5】走行玩具の正面図である。
【図6】サスペンション部材と車輪支持体の係合状態を示す要部平面図である。
【図7】サスペンション部材の位置調節を示す説明図である。
【図8】操舵用直流モータ及びクラッチ機構を示す説明図である。
【図9】走行用直流モータ及び走行機構を示す斜視図である。
【図10】走行機構を示す平面図である。
【図11】駆動回路を示す回路図である。
【図12】電源スイッチを示す回路図である。
【符号の説明】
【0060】
12 ステアリング機構
22L,22R 前輪(車輪)
30L、30R 前輪支持機構(車輪を支持する部材)
32L,32R 操舵回転体
32Lc,32Rc 係合突起
33L、33R 車輪支持体
34L、34R 支持軸(ガイド)
35L、36L、35R,36R 回動支持部(支持部)
37L、37R スペーサ(保持手段)
38L、38R サスペンション部材(緩衝体)
69 操舵アーム(操舵部材)
69Lc,69Rc 環状部
90 車体
100 走行玩具
【技術分野】
【0001】
本発明は、車輪の緩衝構造を備える走行玩具に関するものである。
【背景技術】
【0002】
従来の走行玩具は、車体の左右方向に延出され、その先端部で左右の走行輪をそれぞれ支持する上下に揺動可能な一対のサスペンションアームと、上下方向に伸縮可能であってその下端部を各サスペンションアームに連結されたコイルバネからなる左右ダンパーと、回動可能に車体に支持された二叉のリンク体を介して左右ダンパーの上端部同士を連結する中間ダンパーとを備えている(例えば、特許文献1参照)。
上記構成により、従来の走行玩具は、左右ダンパーの伸縮ストロークと中間ダンパーの伸縮ストロークとの合計となる長いストロークにより、より高い緩衝効果を得ることを可能としている。
【特許文献1】特開昭62−275488号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、走行車両の玩具は、車輪や駆動減を備える一つの車体に対して異なる複数のデザインのボディカバーを用意して交換可能とする場合があった。このような場合、ボディカバーによってホイルベースの長さに差異を生じることがあり、前輪の前後方向の位置調節が行われる。
しかしながら、上記従来の緩衝構造にあっては、車輪を支持する支軸に上下のダンパーを連結し、さらにリンク体を介して左右のダンパーと連結するという複雑な構成を採っている。従って、従来の緩衝構造では、前輪の位置調整時に対応するためには再度の組み直しが非常に煩雑となり、事実上、前輪位置調整が不可能となっていた。
本発明は、走行輪の前後方向の位置変更に際して、車輪の緩衝構造も容易に対応可能とすることを、その目的とする。
【課題を解決するための手段】
【0004】
請求項1記載の走行玩具は、車輪を回転可能に支持する左右一対の車輪支持体と、車体の左右の両側部に設けられ、各車輪支持体を前後方向に沿った軸線を中心に回動可能に支持する左右一対の回動支持部と、を備え、各車輪支持体が、回動支持部の軸線よりも外側で車輪を支持すると共に、各車輪支持体の回動支持部の軸線よりも上部に対して車体に反発する方向に弾性力を生じる緩衝体を備えることを特徴とする。
【0005】
上記走行玩具は、車体の側部に設けられた車輪支持体が車体の前後方向に沿った軸線を中心に回動可能であり、車輪支持体が車輪を回動支持部の軸線よりも外側(車体の左右方向における外側)で支持していることから、車輪が接地すると、走行玩具の自重により車輪支持体はその軸線を中心に回動し、車輪支持体の上部が車体側に近接する。
その一方で、車輪支持体の上部と車体との間には緩衝体が介在するため、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
そして、上記のように、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すればその機能を果たすことが可能である。従って、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することができる。
【0006】
請求項2記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って移動調節可能に前記車体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節を行うに際して、これに対応するように、緩衝体を車体に対して前後方向に位置調節を行う。
【0007】
請求項3記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って車体に設けられた長尺な弾性体であることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体は前後方向に長尺であることから、車輪支持体の上部と緩衝体の一部が依然として対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0008】
請求項4記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って並んで車体に設けられた複数の弾性体からなることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、複数の緩衝体が前後方向に並んでいることから、車輪支持体の上部が別の緩衝体と対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0009】
請求項5記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、各車輪支持体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体が車輪支持体に設けられていることから、車輪支持体の上部は緩衝体を介して車体に当接する。その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【発明の効果】
【0010】
請求項1記載の発明は、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すれば相互間に発生する弾性力で車輪に緩衝効果を与えることができる。従って、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することが可能となる。
これにより、ホイルベースが異なる各種のボディカバーを車体に搭載することができ、異なるデザインのボディカバーでの走行を楽しむことができ、走行玩具の興趣性の向上を図ることが可能となる。
さらに、上述のように、車体の左右において、左右の車輪を前後方向に沿った軸線を中心に回動可能に支持された車輪支持体で支持する構成の場合、接地した左右の車輪は前方から見てハの字状を描くように互いに傾斜することとなる。
従って、上記車輪の支持構造を、特に操舵輪に適用した場合において、操舵操作等の外力を加えない状態では、左右の車輪を直進状態に維持することができ、走行安定性を向上することが可能となる。
【0011】
請求項2記載の発明は、緩衝体が車体側において前後方向に位置調節可能に支持されていることから、車輪の前後位置調節が行われた場合にあっても、これに対応するように緩衝体をスライド移動させるだけの操作で緩衝体の位置調節も完了し、車輪位置変更に伴う緩衝体の位置調整作業の簡易化、迅速化を図ることが可能となる。
【0012】
請求項3記載の発明は、緩衝体が、前後方向に沿って車体に設けられた長尺な弾性体であることから、緩衝体の長さが及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0013】
請求項4記載の発明は、複数の緩衝体が、前後方向に沿って車体に設けられていることから、複数の緩衝体の及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0014】
請求項5記載の発明は、緩衝体が回動支持部に設けられていることから、車輪の前後位置調節が行われた場合には、車輪および車輪支持体が前後方向に移動し、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【発明を実施するための最良の形態】
【0015】
(発明の実施形態の全体構成)
図1〜3は本発明の実施形態たる走行玩具100の平面図であり、図1は直進状態、図2は左折状態、図3は操舵輪を前方に移動調節した状態を示す。以下の説明において、直進前後方向をY軸方向、左右方向をX軸方向、上下方向をZ軸方向とし、これらは互いに直交するものとする。
図1〜3に示すように、走行玩具100は、駆動輪となる左右の後輪21L,21Rと、操舵輪となる左右の前輪22L,22Rと、各前輪22L,22Rを個別に支持する前輪支持機構30L,30Rと、各前輪22L,22Rに対して操舵を行う操舵機構60と、各後輪21L,21Rに走行トルクを付与する走行機構80と、走行機構80の駆動源たる走行用直流モータ4と操舵機構60の駆動源たる操舵用直流モータ13を駆動するモータ駆動回路と、モータ駆動回路の制御回路と、上述した各構成を格納保持する車体90とを備えている。
【0016】
(前輪支持機構)
図4は左側の前輪22Lを支持する前輪支持機構30Lの分解斜視図である。図1乃至図4に基づいて前輪支持機構30Lについて詳説する。なお、右前輪22Rの前輪支持機構30Rは前輪支持機構30LとY−Z平面を基準とする鏡面対称構造のため、説明は省略するものとする。また、以下に説明する前輪支持機構30Lの各構成に対応する前輪支持機構30Rの各構成については、前輪支持機構30Lの各構成に付した符号のLをRに替えて適宜記載するものとする。また、前輪支持機構30Lは車体90の左側面に設けられ、前輪支持機構30Rは右側面に設けられている。
【0017】
前輪支持機構30Lは、回転軸31Lを介して前輪22Lを回転可能に支持する操舵回転体32Lと、回転軸31Lと直交する方向を中心として操舵回転体32Lを回動可能に支持する車輪支持体33Lと、車体90の左側面下部において車輪支持体33Lを支持軸34Lにより軸支する回動支持部35L,36Lと、支持軸34Lに沿った所定の位置に車輪支持体33Lを保持するスペーサ37Lと、前輪22Lから車体90への振動を緩和する緩衝体としてのサスペンション部材38Lと、このサスペンション部材38Lを車体90側で保持するサスペンション保持部39Lとを備えている。
【0018】
上記車輪22Lはその中心に位置する回転軸31Lに対して回転可能であり、この回転軸31Lは操舵回転体32Lに保持されている。
操舵回転体32Lは略円柱状であり、当該円柱形状の中心線C方向(図4における上下方向)における中間の位置において当該中心線C方向に直交するように回転軸31Lを保持している。また、車体支持体32Lの中心線C方向における両端部にはそれぞれ当該中心線C方向に沿って突出した円形の突起32Laが形成されており(下側の突起は図示略)、これらの円形の突起32Laを介して操舵回転体32Lは車輪支持体33Lに支持されている。そして、各突起32Laは円形のため、操舵回転体32は中心線C方向を中心として車輪支持体33Lに対して回動を行うこと可能としている。
【0019】
さらに、操舵回転体32Lには、その円柱形状の半径方向に向かって延出された従動アーム部32Lbをその上端部に備えている。かかる従動アーム部32Lbの先端部には、中心線C方向と平行に丸棒状の係合突起32Lcが固設されている。かかる係合突起32Lcは、後述する操舵機構60の操舵アーム69により、操舵時においてX軸方向に沿ったいずれかの方向に押圧される。これにより、車輪支持体33Lに対して操舵回転体32Lが回動され、前輪22Lの進行方向が変更され、走行玩具100の操舵が行われるようになっている。なお、操舵アーム69は、左右の操舵回転体32L,32Rに対して同時に同方向に同じ変位で操舵を行うようになっている。
【0020】
ここで操舵機構60の操舵アーム69について先行して説明することにする。操舵アーム69は、車体90に設けられたガイド溝(図示略)に支持されてX軸方向に沿って往復移動動作を行うスライド平面部69aと、スライド平面部69aの長手方向両端部のそれぞれにおいて長手方向に向かって延出されると共に途中から垂直に屈曲形成された主動アーム部69Lb,69Rbと、各主動アーム部69Lb,69Rbの先端部に設けられた長穴を備える環状部69Lc,69Rcとを備えている。
上記スライド平面部69aは、長尺の板状であり、その平板面をX−Z平面に平行にさせた状態でX軸方向にスライド移動可能に車体90の図示しないガイド溝に支持されている。
また、スライド平面部69aには、その長手方向に沿った長穴が平板面の中央に穿設されており、長穴の下側の縁部に長手方向に沿ってラック歯69dが形成されている。かかるラック歯69dは、操舵機構60の操舵用直流モータ13がクラッチ機構63を介して回転駆動するピニオン歯車64と連結し、操舵時においてモータトルクを直動移動力に変換して操舵アーム69をX軸方向に沿っていずれかの方向に移動させる。
各主動アーム部69Lb,69Rbは、それぞれスライド平面部69aの両端部から長手方向を延長する方向に延設され、途中で垂直に同方向に屈曲されている。かかる屈曲方向は、スライド平面部69aの平板面に対して垂直な方向である。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各主動アーム部69Lb,69Rbの先端部はY軸方向に沿った状態となる。
環状部69Lc,69Rcは、主動アーム部69Lb,69Rbの先端部に沿って長穴が形成されている。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各環状部69Lc,69Rcの長穴もY軸方向に沿った状態となる。かかる各環状部69Lb,69Rbの長穴には、それぞれ各操舵回転体32L,32Rの係合突起32Lc,32Rcが挿入される。各係合突起32Lc,32RcはX軸方向に傾斜し得るので(後述)、各環状部69Lc,69Rcの長穴の短軸方向幅は係合突起32Lc,32Rcの直径よりも幾分広く設定されている。また、各前輪22L,22R及び操舵回転体32L,32Rは車輪支持体33L,33Rと共にY軸方向に沿ってその配置の調節が可能であり(後述)、これに対応するために、各環状部69Lc,69Rcの長穴の長軸方向長さはY軸方向の位置調整を網羅する長さに設定されている(図3参照)。
【0021】
図2は操舵アーム69による操舵が行われた状態を示している。操舵アーム69は、操舵用直流モータ13によりX軸方向のいずれか一方に移動され、各主動アーム部69Lb,69Rbから各従動アーム部32Lb,32Rbを介して操舵回転体32L,32Rを回動させ、各前輪22L,22Rを同方向に操舵することができる。例えば、操舵アーム69が右方に移動されれば各前輪22L,22Rは左折方向に操舵され、操舵アーム69が左方に移動されれば各前輪22L,22Rは右折方向に操舵される。
なお、操舵アーム69には、各前輪22L,22Rが直進方向を向く直進位置に復帰させる復帰バネ及び復帰バネにより復帰させる直進位置を調整する調整ツマミ(いずれも図示略)が車体内部において併設されている。これにより、操舵用直流モータ13への操舵制御が解除されたときに、自動的に直進走行状態に戻すことが可能となる。
【0022】
次に、車輪支持体33Lについて説明する。車輪支持体33は、操舵回転体32Lを中心線C方向を中心として回動可能に支持する。車輪支持体33Lは、操舵回転体32LのC方向両端部にそれぞれ対向する天板33La及び底板33Lbと、これら天板33La及び底板33Lbを連結する長尺の背面板33Lcとが一体的に形成されており、全体的には略コ字状となっている。即ち、背面板33Lcに対して垂直であって同じ方向に向かって天板33Laと底板33Lbとが延設されている。これら天板33La及び底板33Lbには、それぞれ操舵回転体32Lの両端部に設けられた突起32Laの受け穴(図示略)が形成されており、これにより車輪支持体33は、操舵回転体32Lを回動可能に支持している。
【0023】
そして、背面板33Lcの天板33La及び底板33Lbとは逆側の面における長手方向中間位置には、その平板面に平行であって長手方向に直交する方向に沿って支持軸34Lが挿通される係合穴33Ldが穿設されている。つまり、この係合穴33Ldに挿通された支持軸34Lを中心に、車体90に対して車輪支持体33L,操舵回転体32L及び前輪22Lが回動を行うことが可能となっている。
なお、支持軸34Lは、車体90の左側面下部において、所定の間隔を空けてY軸方向に沿って並んで固定装備されている二つの回動支持部35L,36Lにその両端部が保持される。従って、車輪支持体33LはY軸方向に沿って配設され支持軸34Lにより、同方向を中心として車体90に対して回動可能に支持されることとなる。
【0024】
ここで、二つの回動支持部35L,36Lの間隔は、車輪支持体33LのY軸方向幅よりも大きく設定されており、その余りスペースに筒状のスペーサ37Lが介挿されるようになっている。
【0025】
図1はスペーサ37Lを車輪支持体33Lの前側に配置した状態であり、図2はスペーサ37Lを車輪支持体33Lの後側に配置した状態である。
支持軸34Lは、車輪支持体33LをY軸方向に沿って移動させるガイドとして機能し、当該車輪支持体33LのY軸方向における位置調整を可能とする。
また、スペーサ37は、車輪支持体33Lの前側と後側のいずれかに選択的に配置することで、Y軸方向の調整位置に車輪支持体33Lを保持する保持手段として機能する。すなわち、スペーサ37Lの配置を変えることにより、回動支持部35L,36Lの間となる範囲内でY軸方向についてその位置を調整することが可能となっている。
このように、各車輪支持体33L,33RのY軸方向の配置が変えられることにより、車体90の上から各種のデザインを施した複数種の車体カバーを装着し、これらのホイルベースが異なる場合であっても、適宜、前輪22L,22Rの配置を適切に調整することが可能となる。
なお、スペーサ37Lについては、その配置を変えるだけでなく、その厚さの異なる複数種のものを用意し、車輪支持体33L,33Rの前後に組み合わせて使用したり、より厚さの薄いものを車輪支持体33L,33Rの前後に複数枚ずつ重ねて並べることで、車輪支持体33L,33R及び前輪22L,22RのY軸方向位置を調整しても良い。
また、車輪支持体33Lの係合穴33Ldの周囲やスペーサ37Lの穴の周囲は連続してつながっているが、穴の周囲の一部を切り欠いて断面C字状とし、且つこれら車輪支持体33L及びスペーサ37Lを可撓性を有する素材から形成しても良い。そのようにすることで、既に回動支持部35L,36Lに取り付けられた状態の支持軸34Lに対して、C字形状の欠損部を押し込むようにして車輪支持体33Lやスペーサ37Lを容易に装着することが可能となる。
【0026】
また、車輪支持体33Lの天板33Laの上面には、背面板33Lbの平板面と平行に対向板33Leが一定的に立設されている。この対向板33Leは、車体90に左側面に支持されたサスペンション部材38Lから車体90に対して反発する方向の弾性力が付与されるようになっており、車体90側の対向面上には、サスペンション部材38Lに設けられた半球状の突起38Lcを遊嵌する円形の凹部33Lfが形成されている。
【0027】
図5は、走行玩具100の正面図であり、図6及び図7はサスペンション部材38Lの要部平面図である。
サスペンション部材38Lは、サスペンション保持部39Lに支持される長方形の板状の基部38Laと、この基部38LaからY軸方向に沿って片持ち状態で延出された弾性素材からなる板バネ部38Lbと、板バネ部38Lbの延出先端部側に設けられた半球状の突起部38Lcとを備えている。かかるサスペンション部材38Lの突起部38Lcが、対向板33Leに設けられた円形の凹部33Lfに嵌った状態で、サスペンション部材38は、車輪支持体33に弾性力を付与している。
【0028】
図5に示すように、各前輪22L、22Rがそれぞれ接地すると、当該各前輪22L、22Rはそれぞれ支持軸34L、34Rよりも車体90の幅方向(X軸方向)について外側に位置しているため、走行玩具100の自重により車輪支持体33L、33Rは支持軸34L、34Rを中心としてその上部が車体90の側面に接近する方向に回動することとなる。
これにより、各前輪22L、22R及び車輪支持体33L、33Rは、正面方向から見て互いにハの字状に傾く状態となり、車輪支持体33L、33Rの上側に設けられた対向板33Le、33Reは、車体90の側面側に接近する方向に移動する。しかし、車体90の側面には当該側面に対して離間する方向に反発力を生じさせるサスペンション部材38L、38Rが設けられているため、車輪支持体33L、33Rは対向板33Le、33Reを介してサスペンション部材38L、38Rの弾性力をもって押し返されることとなる。これにより、左右の前輪22L、22Rをハの字状に互いに傾かせた状態を維持しつつも、各前輪22L、22Rが地面から受ける振動を、サスペンション部材38L、38Rで緩和し、車体90への緩衝効果を得ることができる。
また、操舵輪である前輪22L、22Rが互いに下広がりの状態で傾斜した状態を維持することから、外力が付与されていない状態(操舵機構60による操舵操作が行われてない状態)では、直進操舵状態を維持させることが可能となる。
【0029】
また、前述したように車輪支持体33L、33Rは、車体90に対して前後方向の位置調整が可能となっている。このため、サスペンション部材38L、38Rについても、車体90に対して前後方向に位置調整を可能とする必要がある。従って、図5及び図7に示すように、サスペンション保持部39L(39Rも同様)は、サスペンション部材38Lの長尺状の基部をY軸方向に沿ってスライド可能に支持している。これによりY軸方向に移動調節された車輪支持体33Lの対向板33Leに設けられた凹部33Lfに対して、サスペンション部材38Lを同様にY軸方向に移動調節し、その突起38Lcを凹部33Lfに嵌合させることが可能となっている。従って、車輪22L、22Rの前後位置調節が行われた場合であっても、一定の緩衝効果を維持することが可能となる。
【0030】
以上のように、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rの上部に設けられた対向板33Lf、33Rfに対向して車体90の側面側にサスペンション部材38L、38Rを配置している。このため、Y軸方向を中心に軸支された前輪22L、22R及び車輪支持体33L、33Rが下広がりにハの字状に互いに傾斜した状態で、サスペンション部材38L、38Rから弾性的な反発力の付与が行われ、路面状態により生じる振動や衝撃を車体90に対して緩衝することが可能となる。
【0031】
また、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rを支軸34L、34Rにより軸支すると共に当該支持軸34L、34Rに対して摺動可能とし、スペーサ37により位置決定を行う構成であることから、車体全体を伸縮させる構成と異なり、軽微な一部の構成のみでホイルベースの調整が可能となる。従って、調整を行う構成の簡易化、調整作業の容易化及び迅速化を図ることが可能となる。
【0032】
さらに、車輪支持体33L、33Rは、車体から分離して前後方向に移動調節が行われる構成であると共に、主に、前輪22L,22Rと操舵回転体32L,32Rのみを支持する部材であるため、小型が容易であり、当該車輪支持体33L、33Rの移動調節に際して、従来のように、車体に格納される各種の構成の配置やその機能を行わないようになされる配慮を不要とし、簡易な構成でホイルベースの調節を行うことが可能である。
また、車輪支持体33L、33Rの小型化・軽量化が容易であることから、車体90や車輪支持体33L、33Rに強度不足による歪みが生じにくく、良好な走行状態を維持することが可能となる。
【0033】
さらに、操舵機構60の操舵アーム69が長穴を備える環状部69Lc、69Rcのように、操舵回転体32L、32Rの前後位置変化を生じた場合でも左右方向に移動力を伝達可能な構造を備えることから、前輪22L、22Rの前後位置調節を妨げることはなく、且つ安定した操舵を行うことが可能である。
【0034】
また、サスペンション部材38L、38Rが、サスペンション保持部39L、39Rにより前後位置調節可能に支持されていることから、車輪支持体33L、33Rの前後位置変化を生じた場合でもこれらに対して車体90から離間する方向に弾性力を付与することができ、前輪22L、22Rの前後位置調節にかかわらず、安定した緩衝効果を得ることが可能である。
さらに、前輪22L、22Rの移動調整が行われてもサスペンション部材38L、38Rは煩雑な組み直し作業を不要とし、スライド操作のみにより容易に対処することができ、作業の簡易迅速化を図ることが可能となる。
【0035】
(前輪支持機構の変形例)
前述した操舵機構60にあっては、操舵アーム69にラック歯を形成し、操舵用直流モータ13で回転駆動されるピニオン歯車64により操舵アーム69をX軸方向に移動させる構成としたが、特にこれに限定されず、必要時に操舵アーム69に移動力を付与するいかなる方向を用いても良い。例えば、ソレノイドや直動モータのような電磁石と磁性体や永久磁石を用いた構成や、回転式のモータの出力軸の半径方向にアームを装備して、アームの回動により操舵アーム69を左右に移動させる構成でも良い。
【0036】
また、操舵アーム69と操舵回転体32L、32Rの係合部位は、長穴を有する環状部69Lc、69Rcと係合突起32Lc、32Rcとで連結しているが、これらは相互間に生じる相対的なY軸方向の移動を許容しながらX軸方向の移動については連動する構造であればいかなるものでも良い。例えば、長穴と丸棒状の突起を互いに逆側に設けても良いし、長穴に替えて溝を用いても良い。また、主動アーム又は従動アームの延設方向に沿って移動するスライダをいずれか一方に設け、他方とスライダとをZ軸方向を中心に回動可能に連結しても良い。
【0037】
また、前輪支持機構30L、30Rは、前述した構成に限らず、前輪22L、22Rの操舵に要する回動を可能としつつもY軸方向に移動調節を可能とするいかなる構成であっても良い。例えば、回動支持部35L、36Rを車体90に対してY軸方向に沿って移動可能に設け、支持軸34Lと共に車輪支持体33LをY軸方向に移動可能としても良いし、回動支持部35L、36Rを車体90に対してボスと嵌め穴のような凹凸構造で着脱可能とし、車体側面側にY軸方向に沿って複数の凹部又は凸部を設けることで回動支持部35L、36Rの位置調整を行っても良い。或いは、車輪支持体33Lには同軸上に少なくとも二以上のCリングを固設し、回動支持部35L、36LにはCリングの内径よりも大径の支持軸34Lを設け、当該支持軸34Lの外周面上にはその長手方向に沿ってCリングが回転可能に取付られる円周溝を複数設ける構成としても良い。この場合は、複数ある円周溝を選択してCリングにより車輪支持体33を取り付けることで、当該車輪支持体33をY軸方向に位置調整することが可能となる。
なお、前輪支持機構30Rについても同様である。
【0038】
また、前輪支持機構30L、30Rのサスペンション部材38L、38Rをサスペンション保持部39L、39RによりY軸方向に移動調節可能としたが、前輪22L、22Rの前後方向位置調節が行われても、その位置変化にかかわらず、前輪22L、22Rに弾性的に緩衝効果を付与するいかなる構成であっても良い。
例えば、サスペンション部材をY軸方向に沿って車体90に固定装備した長尺な弾性体としても良い。
或いは、複数のサスペンション部材をY軸方向に沿って並んで車体90に固定装備しても良い。
また或いは、各車輪支持体33L、33Rの対向板33Le、33Reに車体90の側面に当接する弾性体からなるサスペンション部材を設けても良い。
これらの場合、前輪22L、22Rの前後位置調節が行われた場合に、サスペンション部材の位置調節作業を行う必要がなく、車輪支持体33L、33Rはサスペンション部材により弾性力が付与され、前輪22L、22Rに対する緩衝効果を維持することができる。また、これらの場合、サスペンション保持部39を不要とすることが可能となる。
【0039】
(操舵機構)
車体90の前部にはモータ及び機構格納部61を備え、このモータ及び機構格納部61の内部にはモータ・機構格納室が設けられている。そして、モータ・機構格納室には操舵用直流モータ13が設置されている。また、車体90には、モータ・機構格納室の上側を閉塞するカバーが取外し自在に取り付けられている。なお、モータ格納室と機構格納室とを区画し、モータ格納室と機構格納室とを上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
【0040】
操舵用直流モータ13としては正転・逆転(正逆転)可能なモータが用いられている。操舵用直流モータ13は、モータケースから軸13aが車体90の後方に向けて突出するように、モータ・機構格納室に設置されている。図8(A),(B)に示すように、軸13aにはクラッチ機構63を介して歯車(ピニオン歯車)64が設けられている。クラッチ機構63は、円板(保持板)63a、クラッチ片63b及び外筒63cを含んで構成されている。すなわち、軸13aには円板63aが固定されている。この円板63aは特に限定はされないが円板状に構成されている。この円板63aの端面にはクラッチ片63bが複数設置されている。各クラッチ片63bは、軸13aの半径方向に動作自在となるように、円板63aに取り付けられている。すなわち、円板63aにはその回転中心からほぼ放射状に延びるガイド63dが形成され、このガイド63dに沿って各クラッチ片63bが軸13aの半径方向に動作自在となっている。各クラッチ片63dは外端側が少なくとも棒状に構成されている。そして、円板63aが回転した際に、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作するように構成されている。
一方、外筒63cは、円板63a及びクラッチ片63dを軸13aの半径方向外方から囲繞するような周壁を有している。そして、操舵用直流モータ13の動力によって円板63aが回転し、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作し、各クラッチ片63dが外筒63cの周壁内面に圧接されて、円板63aと外筒63cが一体的に回転されるようになっている。なお、円板63aが回転していない状態では、円板63aに対して外筒63cは空回り自在となっている。
【0041】
歯車64は、操舵アーム69に形成されたラック歯69aに噛合している。その結果、操舵用直流モータ13の動力によって歯車64が正方向又は逆方向に回転すると、その回転方向に応じて操舵アーム69は左右に動作することとなる。
【0042】
なお、この実施形態では、操舵アーム69を操舵用直流モータ13によって歯車機構を介して動作させるようにしたが、操舵アーム69を電磁石によって左右に動作させるように構成してもよい。すなわち、操舵アーム69に永久磁石又はコイルの一方を付設する一方で、車体90の固定部分に永久磁石又はコイルの他方を付設し、コイルの通電制御を行うことによって操舵アーム69を左右に動作させるように構成してもよい。
【0043】
(走行用直流モータ)
車体90の後部にはモータ及び機構格納部71を備え、このモータ及び機構格納部71の内部は図9に示すようにモータ格納室71aと機構格納室71bとに区画されている。そして、モータ格納室71aには走行用直流モータ4が設置されている。
走行用直流モータ4としては正転・逆転(正逆転)可能なモータが用いられている。走行用直流モータ4は、モータケースから軸4aが車体90の幅方向に向けて突出するように、モータ格納室71aに設置されている。軸4aには歯車(モータピニオン)81aが設けられている。歯車81aは、モータ格納室71aに走行用直流モータ4の本体を設置した際に機構格納室71bに臨むような位置に設けられている。走行用直流モータ4のモータケース4bには外周面に2つの端子4c,4dが設けられている。
一方、モータ格納室71aの床はプリント配線板74によって構成されている。プリント配線板74の表面には、前記した端子4b,4cに対応する場所に電極パターン74a,74bが形成されている。電極パターン74a,74bはプリント配線板74に印刷又は蒸着によって形成されている。
そして、プリント配線板74の上に走行用直流モータ4を載置した際に端子4c,4dと電極パターン74a,74bとが電気的に接続され、走行用直流モータ4に給電できるようにされている。
なお、プリント配線板74は平板状となっていてもよいし、上側に凹となるように湾曲していてもよい。要は、モータケースに対応した形状となっており、端子4c,4dと電極パターン74a,74bが確実に当接されればよい。
以上の構造を持つ走行玩具100によれば、電極パターン74a,74bを形成したプリント配線板74を使用しているので、走行玩具100の組立てが極めて容易となる。すなわち、プリント配線板74を使用しない場合には、車体側に電極板(導電板)を1枚1枚組み付けたり電気的接続するにあたって導線の半田付けを行うなどの細かい作業が必要となるのに対して、電極パターン74a,74bを形成したプリント配線板74を使用する場合には、組立てにあたってプリント配線板74を車体に組み付ければよいので、走行玩具100の組立て極めて容易となる。
また、導線を使用する場合には電気的接続にあたつて、配線を間違えたりする危険性があるが、端子が電極パターン74a,74bに当接することによって直ちに電気的接続がなされるので、その心配はない。
【0044】
(走行機構)
機構格納室71bには、走行用直流モータ4の走行トルクを各後輪21L,21Rに伝達するための走行機構80が設置されている。走行機構80は前記歯車81aを含む歯車機構81によって構成されている。
すなわち、機構格納室71bには軸4aに平行な軸82が延在している。図10に示すように、軸82には歯車81bが軸82に対して空回り自在に設けられている。歯車81bは軸82の軸線方向に移動自在に構成されている。そして、この歯車81bの左右位置には歯車81Lc,81Rcが一体的に設けられている。
また、機構格納室71bには軸82に平行な軸(後輪車軸)83が延在している。軸83には歯車81Ld,81Rdが固定して設けられている。この歯車81Ld,81Rdには、歯車81bが軸82の軸線方向に移動した際に、その移動方向に応じて歯車81Lc,81Rcが択一的に噛合するようになっている。具体的には、歯車81bが軸82の軸線方向左に動作した際には歯車81Lcが歯車81Ldに噛合し、一方、歯車81bが軸82の軸線方向右に動作した際には歯車81Rcが歯車81Rdに噛合するようになっている。そして、この歯車の噛合状態を変更することによって、走行トルクを変えることができる。
なお、歯車81bを軸82の軸線方向に移動させるために、車体90の下側には図示しない操作摘みが付設され、この操作摘みの操作によってレバー84を左右に移動させ、そのレバー84の2つの爪84a,84bに間に位置する歯車81bが左右に押されて歯車の噛合状態を変えられるようになっている。
【0045】
(カバー)
図9に示すように、車体90には、モータ格納室71a及び機構格納室71bの上側を閉塞するカバー91が着脱自在に取り付けられている。このカバー91はモータ押さえとして機能する。なお、モータ格納室71a及び機構格納室71bの上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
カバー91には放熱用開口91aが多数設けられている。また、カバー91には放熱板92を装着するためのスリット93が設けられている。そして、スリット93から放熱板92を着脱できるように構成されている。放熱板92としては金属、例えば銅やアルミニウムが好ましいが、放熱効果の高い形状を選択すれば合成樹脂(例えばABS樹脂)であってもよい。
以上の構造を持つ走行玩具100によれば、放熱板92の交換が簡単にでき、それによって放熱性能を簡単に変化させることができる。また、走行路の状況に応じて、重量の異なる放熱板92を使用することが可能となる。さらに、気分に応じて、色合いや形状の異なる放熱板92を使用することができる。このような種々の効果を有効に発揮させるためには、放熱性、重量、色合い、形状のいずれかが異なる複数の放熱板を用意しておき、そして、目的に合った放熱板をその中から選択して使用することが好ましい。
なお、一度に取り付ける放熱板92の数は1つに限定はされない。カバー91に2つ以上の放熱板92を取り付けられるような構造にしてもよい。
【0046】
(駆動回路及び制御回路)
走行玩具は、走行用直流モータおよび操舵用直流モータを搭載し、各直流モータの回転方向をリモコンからの電波で遠隔制御するように構成されている。
【0047】
図11に示すように、走行玩具内には、受信回路1と、制御IC2と、走行用直流モータ4を駆動する走行モータ駆動回路3と、操舵用直流モータ13を駆動する操舵モータ駆動回路8が内蔵されている。
【0048】
図示しないリモート操作装置から送信された操作信号電波は、アンテナANTを介して受信回路1で受信/復調され、制御IC2に入力される。制御IC2は、入力された操作信号に対応する制御命令信号を走行系及び/又は操舵系の制御駆動回路に送る。
【0049】
例えば、操作信号が前進命令であった場合、制御IC2は前進命令信号SFをモータ駆動回路3に出力する。走行モータ駆動回路3は、直流モータ4に対して前進方向に対応する極性の電圧を供給する。同様に、操作信号が後退命令であった場合、制御IC2は後退命令信号SBを走行モータ駆動回路3に出力する。走行モータ駆動回路3は直流モータ4に対して後退方向に対応する極性の電圧を供給する。
【0050】
一方、操作信号が操舵制御信号で右旋回命令であった場合、制御IC2は右旋回命令信号SRを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は、直流モータ13に対して右旋回方向に対応する極性の電圧を供給する。同様に、操作信号が左旋回命令であった場合、制御IC2は左旋回命令信号SLを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は直流モータ13に対して左旋回方向に対応する極性の電圧を供給する。
【0051】
操舵モータ駆動回路8は、少なくとも2個の電池9、10が直列に接続可能な正極電源端子14及び負極電源端子15を有している。
電源電圧Vccを供給する正極電源端子14とGND電位に接続される負極電源端子15との間には、制御IC2からの左旋回命令信号SL、右旋回命令信号SRによって交互に導通(ON)又は非導通(OFF)となるPNP形トランジスタ(第1スイッチ素子)Q5及びNPN形トランジスタ(第2スイッチ素子)Q6が直列に接続されている。
【0052】
電池9、10同士の接続中点16と、トランジスタQ5とトランジスタQ6との接続中点17と、の間に操舵用直流モータ13が接続されている。
操舵用直流モータ13の回転軸には、操舵輪(前輪)に連結された操舵機構60が連結されている。操舵用直流モータ13の回転方向を切換えることにより、この操舵機構60を介して操舵輪の向きを変更することができる。
【0053】
図12に示すように、電池9、10同士の接続中点には、投入時において操舵用直流モータ13の一側の接続端子及び電池9の負極側の端子16Aと電池10の正極側の端子16Bを電気的に接続する自己保持型の電源スイッチ18が設けられている。
この電源スイッチ18を投入することにより、電池9の負側と電池10の正側が電気的に接続され、かつ操舵用直流モータ13の一方の端子が電源スイッチ18に接続されるので直列接続された電池2個分の電源電圧Vcc(例、1.5V×2=3V)が各回路1,2,3,8、に供給され、また、操舵用直流モータ13の電機子の電流路が形成される。
なお、操舵モータ駆動回路8の両端に電源電圧Vcc(例、3V)が与えられるが、操舵用直流モータ13の各回転方向で操舵用直流モータ13に与えられるのは、電源電圧Vccの1/2(1.5V)である。その理由は、後述するループL1とループL2の単位で使用する電池が異なるからである。
【0054】
(回路動作)
まず、電源スイッチ18(図12)を投入すると、電池9と10とが負極側の端子16A及び正極側の端子16Bを介して直列に接続され、かつ操舵用直流モータ13が電池9と10との接続中点16(図11)に接続される。このとき、操舵モータ駆動回路8には二つの閉ループが形成される。
【0055】
図11に示すように、一つは、電池9⇒正極電源端子14⇒トランジスタQ5⇒接続中点17⇒操舵用直流モータ13⇒接続中点16⇒電池9のループL1である。
他の一つは、電池10⇒接続中点16⇒操舵用直流モータ13⇒接続中点17⇒トランジスタQ6⇒負極電源端子15⇒電池10のループL2である。
【0056】
いま、制御IC2から左旋回命令信号SL「電位L」が与えられたとすると、トランジスタQ5がONとなり、ループL1の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する左向きに回転する。一方、制御IC2から右旋回命令信号SR「電位H」が与えられたとすると、トランジスタQ6がONとなり、ループL1の場合とは逆向きのループL2の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する右向きに回転する。
【0057】
このように、トランジスタQ5とトランジスタQ6とは交互にON/OFF動作し、いわば相補的に動作する。そのON/OFF動作に伴って、操舵用直流モータ13に流れる電機子電流の向きが逆転し、走行玩具の進行方向を制御することができる。
【0058】
なお、複数の走行玩具100を同時に走行させる場合には、走行玩具100同士で動作周波数を変えることが行われるが、この場合、走行玩具側の動作周波数に合致したリモコンを選択して出荷することが必要となる。そこで、走行玩具100とそれに対応するリモコンとの組の選択を容易にするために、周波数動作周波数に応じてアンテナ用の導線の色を変えておくことが好ましい。
【図面の簡単な説明】
【0059】
【図1】本発明の実施形態たる走行玩具の直進状態の平面図である。
【図2】本発明の実施形態たる走行玩具の左折状態の平面図である。
【図3】本発明の実施形態たる走行玩具の操舵輪を前方に移動調節した状態の平面図である。
【図4】左側の前輪を支持する前輪支持機構の分解斜視図である。
【図5】走行玩具の正面図である。
【図6】サスペンション部材と車輪支持体の係合状態を示す要部平面図である。
【図7】サスペンション部材の位置調節を示す説明図である。
【図8】操舵用直流モータ及びクラッチ機構を示す説明図である。
【図9】走行用直流モータ及び走行機構を示す斜視図である。
【図10】走行機構を示す平面図である。
【図11】駆動回路を示す回路図である。
【図12】電源スイッチを示す回路図である。
【符号の説明】
【0060】
12 ステアリング機構
22L,22R 前輪(車輪)
30L、30R 前輪支持機構(車輪を支持する部材)
32L,32R 操舵回転体
32Lc,32Rc 係合突起
33L、33R 車輪支持体
34L、34R 支持軸(ガイド)
35L、36L、35R,36R 回動支持部(支持部)
37L、37R スペーサ(保持手段)
38L、38R サスペンション部材(緩衝体)
69 操舵アーム(操舵部材)
69Lc,69Rc 環状部
90 車体
100 走行玩具
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪の緩衝構造を備える走行玩具に関するものである。
【背景技術】
【0002】
従来の走行玩具は、車体の左右方向に延出され、その先端部で左右の走行輪をそれぞれ支持する上下に揺動可能な一対のサスペンションアームと、上下方向に伸縮可能であってその下端部を各サスペンションアームに連結されたコイルバネからなる左右ダンパーと、回動可能に車体に支持された二叉のリンク体を介して左右ダンパーの上端部同士を連結する中間ダンパーとを備えている(例えば、特許文献1参照)。
上記構成により、従来の走行玩具は、左右ダンパーの伸縮ストロークと中間ダンパーの伸縮ストロークとの合計となる長いストロークにより、より高い緩衝効果を得ることを可能としている。
【特許文献1】特開昭62−275488号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、走行車両の玩具は、車輪や駆動源を備える一つの車体に対して異なる複数のデザインのボディカバーを用意して交換可能とする場合があった。このような場合、ボディカバーによってホイルベースの長さに差異を生じることがあり、前輪の前後方向の位置調節が行われる。
しかしながら、上記従来の緩衝構造にあっては、車輪を支持する支軸に上下のダンパーを連結し、さらにリンク体を介して左右のダンパーと連結するという複雑な構成を採っている。従って、従来の緩衝構造では、前輪の位置調整時に対応するためには再度の組み直しが非常に煩雑となり、事実上、前輪位置調整が不可能となっていた。
本発明は、走行輪の前後方向の位置変更に際して、車輪の緩衝構造も容易に対応可能とすることを、その目的とする。
【課題を解決するための手段】
【0004】
請求項1記載の走行玩具は、車輪を回転可能に支持する左右一対の車輪支持体と、車体の左右の両側部に設けられ、各車輪支持体を前後方向に沿った軸線を中心に回動可能に支持する左右一対の回動支持部と、を備え、各車輪支持体が、回動支持部の軸線よりも外側で車輪を支持すると共に、各車輪支持体の回動支持部の軸線よりも上部に対して車体に反発する方向に弾性力を生じる緩衝体を備えることを特徴とする。
【0005】
上記走行玩具は、車体の側部に設けられた車輪支持体が車体の前後方向に沿った軸線を中心に回動可能であり、車輪支持体が車輪を回動支持部の軸線よりも外側(車体の左右方向における外側)で支持していることから、車輪が接地すると、走行玩具の自重により車輪支持体はその軸線を中心に回動し、車輪支持体の上部が車体側に近接する。
その一方で、車輪支持体の上部と車体との間には緩衝体が介在するため、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
そして、上記のように、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すればその機能を果たすことが可能である。従って、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することができる。
【0006】
請求項2記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って移動調節可能に前記車体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節を行うに際して、これに対応するように、緩衝体を車体に対して前後方向に位置調節を行う。
【0007】
請求項3記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って車体に設けられた長尺な弾性体であることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体は前後方向に長尺であることから、車輪支持体の上部と緩衝体の一部が依然として対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0008】
請求項4記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、前後方向に沿って並んで車体に設けられた複数の弾性体からなることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、複数の緩衝体が前後方向に並んでいることから、車輪支持体の上部が別の緩衝体と対向した状態となり、その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【0009】
請求項5記載の走行玩具は、請求項1記載の発明と同様の構成を備えると共に、緩衝体は、各車輪支持体に設けられていることを特徴とする。
上記走行玩具は、車体に対する車輪の前後方向位置調節が行われた場合でも、緩衝体が車輪支持体に設けられていることから、車輪支持体の上部は緩衝体を介して車体に当接する。その結果、車輪支持体を介して車輪は緩衝体の弾性力をもって地面側へ押し返され、車体への緩衝効果を得ることができる。
【発明の効果】
【0010】
請求項1記載の発明は、車輪支持体の上部と車体との間に挟むように緩衝体を配置する構造のため、緩衝体を少なくとも車輪支持体側か車体側のいずれかに一方に装着すれば相互間に発生する弾性力で車輪に緩衝効果を与えることができる。従って、従来の緩衝構造のようにダンパーやリンク体を各部に連結する構造と異なり、前輪の移動調整が行われても、緩衝体は煩雑な組み直し作業を不要とし、容易に対処することが可能となる。
これにより、ホイルベースが異なる各種のボディカバーを車体に搭載することができ、異なるデザインのボディカバーでの走行を楽しむことができ、走行玩具の興趣性の向上を図ることが可能となる。
さらに、上述のように、車体の左右において、左右の車輪を前後方向に沿った軸線を中心に回動可能に支持された車輪支持体で支持する構成の場合、接地した左右の車輪は前方から見てハの字状を描くように互いに傾斜することとなる。
従って、上記車輪の支持構造を、特に操舵輪に適用した場合において、操舵操作等の外力を加えない状態では、左右の車輪を直進状態に維持することができ、走行安定性を向上することが可能となる。
【0011】
請求項2記載の発明は、緩衝体が車体側において前後方向に位置調節可能に支持されていることから、車輪の前後位置調節が行われた場合にあっても、これに対応するように緩衝体をスライド移動させるだけの操作で緩衝体の位置調節も完了し、車輪位置変更に伴う緩衝体の位置調整作業の簡易化、迅速化を図ることが可能となる。
【0012】
請求項3記載の発明は、緩衝体が、前後方向に沿って車体に設けられた長尺な弾性体であることから、緩衝体の長さが及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変
更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0013】
請求項4記載の発明は、複数の緩衝体が、前後方向に沿って車体に設けられていることから、複数の緩衝体の及ぶ範囲で車輪の前後位置調節が行われた場合には、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【0014】
請求項5記載の発明は、緩衝体が回動支持部に設けられていることから、車輪の前後位置調節が行われた場合には、車輪および車輪支持体が前後方向に移動し、緩衝体の調節作業を行うまでもなく車輪に対する緩衝効果を維持することができ、車輪位置変更に伴う緩衝体の位置調整作業の解消又は飛躍的な簡易化、迅速化を図ることが可能となる。
【発明を実施するための最良の形態】
【0015】
(発明の実施形態の全体構成)
図1〜3は本発明の実施形態たる走行玩具100の平面図であり、図1は直進状態、図2は左折状態、図3は操舵輪を前方に移動調節した状態を示す。以下の説明において、直進前後方向をY軸方向、左右方向をX軸方向、上下方向をZ軸方向とし、これらは互いに直交するものとする。
図1〜3に示すように、走行玩具100は、駆動輪となる左右の後輪21L,21Rと、操舵輪となる左右の前輪22L,22Rと、各前輪22L,22Rを個別に支持する前輪支持機構30L,30Rと、各前輪22L,22Rに対して操舵を行う操舵機構60と、各後輪21L,21Rに走行トルクを付与する走行機構80と、走行機構80の駆動源たる走行用直流モータ4と操舵機構60の駆動源たる操舵用直流モータ13を駆動するモータ駆動回路と、モータ駆動回路の制御回路と、上述した各構成を格納保持する車体90とを備えている。
【0016】
(前輪支持機構)
図4は左側の前輪22Lを支持する前輪支持機構30Lの分解斜視図である。図1乃至図4に基づいて前輪支持機構30Lについて詳説する。なお、右前輪22Rの前輪支持機構30Rは前輪支持機構30LとY−Z平面を基準とする鏡面対称構造のため、説明は省略するものとする。また、以下に説明する前輪支持機構30Lの各構成に対応する前輪支持機構30Rの各構成については、前輪支持機構30Lの各構成に付した符号のLをRに替えて適宜記載するものとする。また、前輪支持機構30Lは車体90の左側面に設けられ、前輪支持機構30Rは右側面に設けられている。
【0017】
前輪支持機構30Lは、回転軸31Lを介して前輪22Lを回転可能に支持する操舵回転体32Lと、回転軸31Lと直交する方向を中心として操舵回転体32Lを回動可能に支持する車輪支持体33Lと、車体90の左側面下部において車輪支持体33Lを支持軸34Lにより軸支する回動支持部35L,36Lと、支持軸34Lに沿った所定の位置に車輪支持体33Lを保持するスペーサ37Lと、前輪22Lから車体90への振動を緩和する緩衝体としてのサスペンション部材38Lと、このサスペンション部材38Lを車体90側で保持するサスペンション保持部39Lとを備えている。
【0018】
上記車輪22Lはその中心に位置する回転軸31Lに対して回転可能であり、この回転軸31Lは操舵回転体32Lに保持されている。
操舵回転体32Lは略円柱状であり、当該円柱形状の中心線C方向(図4における上下方向)における中間の位置において当該中心線C方向に直交するように回転軸31Lを保持している。また、車体支持体32Lの中心線C方向における両端部にはそれぞれ当該中心線C方向に沿って突出した円形の突起32Laが形成されており(下側の突起は図示略
)、これらの円形の突起32Laを介して操舵回転体32Lは車輪支持体33Lに支持されている。そして、各突起32Laは円形のため、操舵回転体32Lは中心線C方向を中心として車輪支持体33Lに対して回動を行うこと可能としている。
【0019】
さらに、操舵回転体32Lには、その円柱形状の半径方向に向かって延出された従動アーム部32Lbをその上端部に備えている。かかる従動アーム部32Lbの先端部には、中心線C方向と平行に丸棒状の係合突起32Lcが固設されている。かかる係合突起32Lcは、後述する操舵機構60の操舵アーム69により、操舵時においてX軸方向に沿ったいずれかの方向に押圧される。これにより、車輪支持体33Lに対して操舵回転体32Lが回動され、前輪22Lの進行方向が変更され、走行玩具100の操舵が行われるようになっている。なお、操舵アーム69は、左右の操舵回転体32L,32Rに対して同時に同方向に同じ変位で操舵を行うようになっている。
【0020】
ここで操舵機構60の操舵アーム69について先行して説明することにする。操舵アーム69は、車体90に設けられたガイド溝(図示略)に支持されてX軸方向に沿って往復移動動作を行うスライド平面部69aと、スライド平面部69aの長手方向両端部のそれぞれにおいて長手方向に向かって延出されると共に途中から垂直に屈曲形成された主動アーム部69Lb,69Rbと、各主動アーム部69Lb,69Rbの先端部に設けられた長穴を備える環状部69Lc,69Rcとを備えている。
上記スライド平面部69aは、長尺の板状であり、その平板面をX−Z平面に平行にさせた状態でX軸方向にスライド移動可能に車体90の図示しないガイド溝に支持されている。
また、スライド平面部69aには、その長手方向に沿った長穴が平板面の中央に穿設されており、長穴の下側の縁部に長手方向に沿ってラック歯69dが形成されている。かかるラック歯69dは、操舵機構60の操舵用直流モータ13がクラッチ機構63を介して回転駆動するピニオン歯車64と連結し、操舵時においてモータトルクを直動移動力に変換して操舵アーム69をX軸方向に沿っていずれかの方向に移動させる。
各主動アーム部69Lb,69Rbは、それぞれスライド平面部69aの両端部から長手方向を延長する方向に延設され、途中で垂直に同方向に屈曲されている。かかる屈曲方向は、スライド平面部69aの平板面に対して垂直な方向である。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各主動アーム部69Lb,69Rbの先端部はY軸方向に沿った状態となる。
環状部69Lc,69Rcは、主動アーム部69Lb,69Rbの先端部に沿って長穴が形成されている。つまり、操舵アーム69のスライド平面部69aがX−Z平面に沿った状態で車体90に支持されると、各環状部69Lc,69Rcの長穴もY軸方向に沿った状態となる。かかる各環状部69Lb,69Rbの長穴には、それぞれ各操舵回転体32L,32Rの係合突起32Lc,32Rcが挿入される。各係合突起32Lc,32RcはX軸方向に傾斜し得るので(後述)、各環状部69Lc,69Rcの長穴の短軸方向幅は係合突起32Lc,32Rcの直径よりも幾分広く設定されている。また、各前輪22L,22R及び操舵回転体32L,32Rは車輪支持体33L,33Rと共にY軸方向に沿ってその配置の調節が可能であり(後述)、これに対応するために、各環状部69Lc,69Rcの長穴の長軸方向長さはY軸方向の位置調整を網羅する長さに設定されている(図3参照)。
【0021】
図2は操舵アーム69による操舵が行われた状態を示している。操舵アーム69は、操舵用直流モータ13によりX軸方向のいずれか一方に移動され、各主動アーム部69Lb,69Rbから各従動アーム部32Lb,32Rbを介して操舵回転体32L,32Rを回動させ、各前輪22L,22Rを同方向に操舵することができる。例えば、操舵アーム69が右方に移動されれば各前輪22L,22Rは左折方向に操舵され、操舵アーム69が左方に移動されれば各前輪22L,22Rは右折方向に操舵される。
なお、操舵アーム69には、各前輪22L,22Rが直進方向を向く直進位置に復帰させる復帰バネ及び復帰バネにより復帰させる直進位置を調整する調整ツマミ(いずれも図示略)が車体内部において併設されている。これにより、操舵用直流モータ13への操舵制御が解除されたときに、自動的に直進走行状態に戻すことが可能となる。
【0022】
次に、車輪支持体33Lについて説明する。車輪支持体33Lは、操舵回転体32Lを中心線C方向を中心として回動可能に支持する。車輪支持体33Lは、操舵回転体32LのC方向両端部にそれぞれ対向する天板33La及び底板33Lbと、これら天板33La及び底板33Lbを連結する長尺の背面板33Lcとが一体的に形成されており、全体的には略コ字状となっている。即ち、背面板33Lcに対して垂直であって同じ方向に向かって天板33Laと底板33Lbとが延設されている。これら天板33La及び底板33Lbには、それぞれ操舵回転体32Lの両端部に設けられた突起32Laの受け穴(図示略)が形成されており、これにより車輪支持体33は、操舵回転体32Lを回動可能に支持している。
【0023】
そして、背面板33Lcの天板33La及び底板33Lbとは逆側の面における長手方向中間位置には、その平板面に平行であって長手方向に直交する方向に沿って支持軸34Lが挿通される係合穴33Ldが穿設されている。つまり、この係合穴33Ldに挿通された支持軸34Lを中心に、車体90に対して車輪支持体33L,操舵回転体32L及び前輪22Lが回動を行うことが可能となっている。
なお、支持軸34Lは、車体90の左側面下部において、所定の間隔を空けてY軸方向に沿って並んで固定装備されている二つの回動支持部35L,36Lにその両端部が保持される。従って、車輪支持体33LはY軸方向に沿って配設された支持軸34Lにより、同方向を中心として車体90に対して回動可能に支持されることとなる。
【0024】
ここで、二つの回動支持部35L,36Lの間隔は、車輪支持体33LのY軸方向幅よりも大きく設定されており、その余りスペースに筒状のスペーサ37Lが介挿されるようになっている。
【0025】
図1はスペーサ37Lを車輪支持体33Lの前側に配置した状態であり、図2はスペーサ37Lを車輪支持体33Lの後側に配置した状態である。
支持軸34Lは、車輪支持体33LをY軸方向に沿って移動させるガイドとして機能し、当該車輪支持体33LのY軸方向における位置調整を可能とする。
また、スペーサ37は、車輪支持体33Lの前側と後側のいずれかに選択的に配置することで、Y軸方向の調整位置に車輪支持体33Lを保持する保持手段として機能する。すなわち、スペーサ37Lの配置を変えることにより、回動支持部35L,36Lの間となる範囲内でY軸方向についてその位置を調整することが可能となっている。
このように、各車輪支持体33L,33RのY軸方向の配置が変えられることにより、車体90の上から各種のデザインを施した複数種の車体カバーを装着し、これらのホイルベースが異なる場合であっても、適宜、前輪22L,22Rの配置を適切に調整することが可能となる。
なお、スペーサ37Lについては、その配置を変えるだけでなく、その厚さの異なる複数種のものを用意し、車輪支持体33L,33Rの前後に組み合わせて使用したり、より厚さの薄いものを車輪支持体33L,33Rの前後に複数枚ずつ重ねて並べることで、車輪支持体33L,33R及び前輪22L,22RのY軸方向位置を調整しても良い。
また、車輪支持体33Lの係合穴33Ldの周囲やスペーサ37Lの穴の周囲は連続してつながっているが、穴の周囲の一部を切り欠いて断面C字状とし、且つこれら車輪支持体33L及びスペーサ37Lを可撓性を有する素材から形成しても良い。そのようにすることで、既に回動支持部35L,36Lに取り付けられた状態の支持軸34Lに対して、C字形状の欠損部を押し込むようにして車輪支持体33Lやスペーサ37Lを容易に装着
することが可能となる。
【0026】
また、車輪支持体33Lの天板33Laの上面には、背面板33Lbの平板面と平行に対向板33Leが一定的に立設されている。この対向板33Leは、車体90に左側面に支持されたサスペンション部材38Lから車体90に対して反発する方向の弾性力が付与されるようになっており、車体90側の対向面上には、サスペンション部材38Lに設けられた半球状の突起38Lcを遊嵌する円形の凹部33Lfが形成されている。
【0027】
図5は、走行玩具100の正面図であり、図6及び図7はサスペンション部材38Lの要部平面図である。
サスペンション部材38Lは、サスペンション保持部39Lに支持される長方形の板状の基部38Laと、この基部38LaからY軸方向に沿って片持ち状態で延出された弾性素材からなる板バネ部38Lbと、板バネ部38Lbの延出先端部側に設けられた半球状の突起部38Lcとを備えている。かかるサスペンション部材38Lの突起部38Lcが、対向板33Leに設けられた円形の凹部33Lfに嵌った状態で、サスペンション部材38は、車輪支持体33に弾性力を付与している。
【0028】
図5に示すように、各前輪22L、22Rがそれぞれ接地すると、当該各前輪22L、22Rはそれぞれ支持軸34L、34Rよりも車体90の幅方向(X軸方向)について外側に位置しているため、走行玩具100の自重により車輪支持体33L、33Rは支持軸34L、34Rを中心としてその上部が車体90の側面に接近する方向に回動することとなる。
これにより、各前輪22L、22R及び車輪支持体33L、33Rは、正面方向から見て互いにハの字状に傾く状態となり、車輪支持体33L、33Rの上側に設けられた対向板33Le、33Reは、車体90の側面側に接近する方向に移動する。しかし、車体90の側面には当該側面に対して離間する方向に反発力を生じさせるサスペンション部材38L、38Rが設けられているため、車輪支持体33L、33Rは対向板33Le、33Reを介してサスペンション部材38L、38Rの弾性力をもって押し返されることとなる。これにより、左右の前輪22L、22Rをハの字状に互いに傾かせた状態を維持しつつも、各前輪22L、22Rが地面から受ける振動を、サスペンション部材38L、38Rで緩和し、車体90への緩衝効果を得ることができる。
また、操舵輪である前輪22L、22Rが互いに下広がりの状態で傾斜した状態を維持することから、外力が付与されていない状態(操舵機構60による操舵操作が行われてない状態)では、直進操舵状態を維持させることが可能となる。
【0029】
また、前述したように車輪支持体33L、33Rは、車体90に対して前後方向の位置調整が可能となっている。このため、サスペンション部材38L、38Rについても、車体90に対して前後方向に位置調整を可能とする必要がある。従って、図5及び図7に示すように、サスペンション保持部39L(39Rも同様)は、サスペンション部材38Lの長尺状の基部をY軸方向に沿ってスライド可能に支持している。これによりY軸方向に移動調節された車輪支持体33Lの対向板33Leに設けられた凹部33Lfに対して、サスペンション部材38Lを同様にY軸方向に移動調節し、その突起38Lcを凹部33Lfに嵌合させることが可能となっている。従って、車輪22L、22Rの前後位置調節が行われた場合であっても、一定の緩衝効果を維持することが可能となる。
【0030】
以上のように、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rの上部に設けられた対向板33Lf、33Rfに対向して車体90の側面側にサスペンション部材38L、38Rを配置している。このため、Y軸方向を中心に軸支された前輪22L、22R及び車輪支持体33L、33Rが下広がりにハの字状に互いに傾斜した状態で、サスペンション部材38L、38Rから弾性的な反発力の付与が行われ、路面状態により生
じる振動や衝撃を車体90に対して緩衝することが可能となる。
【0031】
また、各前輪支持機構30L、30Rでは、車輪支持体33L、33Rを支軸34L、34Rにより軸支すると共に当該支持軸34L、34Rに対して摺動可能とし、スペーサ37L、37Rにより位置決定を行う構成であることから、車体全体を伸縮させる構成と異なり、軽微な一部の構成のみでホイルベースの調整が可能となる。従って、調整を行う構成の簡易化、調整作業の容易化及び迅速化を図ることが可能となる。
【0032】
さらに、車輪支持体33L、33Rは、車体から分離して前後方向に移動調節が行われる構成であると共に、主に、前輪22L,22Rと操舵回転体32L,32Rのみを支持する部材であるため、小型が容易であり、当該車輪支持体33L、33Rの移動調節に際して、従来のように、車体に格納される各種の構成の配置やその機能を行わないようになされる配慮を不要とし、簡易な構成でホイルベースの調節を行うことが可能である。
また、車輪支持体33L、33Rの小型化・軽量化が容易であることから、車体90や車輪支持体33L、33Rに強度不足による歪みが生じにくく、良好な走行状態を維持することが可能となる。
【0033】
さらに、操舵機構60の操舵アーム69が長穴を備える環状部69Lc、69Rcのように、操舵回転体32L、32Rの前後位置変化を生じた場合でも左右方向に移動力を伝達可能な構造を備えることから、前輪22L、22Rの前後位置調節を妨げることはなく、且つ安定した操舵を行うことが可能である。
【0034】
また、サスペンション部材38L、38Rが、サスペンション保持部39L、39Rにより前後位置調節可能に支持されていることから、車輪支持体33L、33Rの前後位置変化を生じた場合でもこれらに対して車体90から離間する方向に弾性力を付与することができ、前輪22L、22Rの前後位置調節にかかわらず、安定した緩衝効果を得ることが可能である。
さらに、前輪22L、22Rの移動調整が行われてもサスペンション部材38L、38Rは煩雑な組み直し作業を不要とし、スライド操作のみにより容易に対処することができ、作業の簡易迅速化を図ることが可能となる。
【0035】
(前輪支持機構の変形例)
前述した操舵機構60にあっては、操舵アーム69にラック歯を形成し、操舵用直流モータ13で回転駆動されるピニオン歯車64により操舵アーム69をX軸方向に移動させる構成としたが、特にこれに限定されず、必要時に操舵アーム69に移動力を付与するいかなる方法を用いても良い。例えば、ソレノイドや直動モータのような電磁石と磁性体や永久磁石を用いた構成や、回転式のモータの出力軸の半径方向にアームを装備して、アームの回動により操舵アーム69を左右に移動させる構成でも良い。
【0036】
また、操舵アーム69と操舵回転体32L、32Rの係合部位は、長穴を有する環状部69Lc、69Rcと係合突起32Lc、32Rcとで連結しているが、これらは相互間に生じる相対的なY軸方向の移動を許容しながらX軸方向の移動については連動する構造であればいかなるものでも良い。例えば、長穴と丸棒状の突起を互いに逆側に設けても良いし、長穴に替えて溝を用いても良い。また、主動アーム又は従動アームの延設方向に沿って移動するスライダをいずれか一方に設け、他方とスライダとをZ軸方向を中心に回動可能に連結しても良い。
【0037】
また、前輪支持機構30L、30Rは、前述した構成に限らず、前輪22L、22Rの操舵に要する回動を可能としつつもY軸方向に移動調節を可能とするいかなる構成であっても良い。例えば、回動支持部35L、36Rを車体90に対してY軸方向に沿って移動
可能に設け、支持軸34Lと共に車輪支持体33LをY軸方向に移動可能としても良いし、回動支持部35L、36Rを車体90に対してボスと嵌め穴のような凹凸構造で着脱可能とし、車体側面側にY軸方向に沿って複数の凹部又は凸部を設けることで回動支持部35L、36Rの位置調整を行っても良い。或いは、車輪支持体33Lには同軸上に少なくとも二以上のCリングを固設し、回動支持部35L、36LにはCリングの内径よりも大径の支持軸34Lを設け、当該支持軸34Lの外周面上にはその長手方向に沿ってCリングが回転可能に取付られる円周溝を複数設ける構成としても良い。この場合は、複数ある円周溝を選択してCリングにより車輪支持体33を取り付けることで、当該車輪支持体33をY軸方向に位置調整することが可能となる。
なお、前輪支持機構30Rについても同様である。
【0038】
また、前輪支持機構30L、30Rのサスペンション部材38L、38Rをサスペンション保持部39L、39RによりY軸方向に移動調節可能としたが、前輪22L、22Rの前後方向位置調節が行われても、その位置変化にかかわらず、前輪22L、22Rに弾性的に緩衝効果を付与するいかなる構成であっても良い。
例えば、サスペンション部材をY軸方向に沿って車体90に固定装備した長尺な弾性体としても良い。
或いは、複数のサスペンション部材をY軸方向に沿って並んで車体90に固定装備しても良い。
また或いは、各車輪支持体33L、33Rの対向板33Le、33Reに車体90の側面に当接する弾性体からなるサスペンション部材を設けても良い。
これらの場合、前輪22L、22Rの前後位置調節が行われた場合に、サスペンション部材の位置調節作業を行う必要がなく、車輪支持体33L、33Rはサスペンション部材により弾性力が付与され、前輪22L、22Rに対する緩衝効果を維持することができる。また、これらの場合、サスペンション保持部39を不要とすることが可能となる。
【0039】
(操舵機構)
車体90の前部にはモータ及び機構格納部61を備え、このモータ及び機構格納部61の内部にはモータ・機構格納室が設けられている。そして、モータ・機構格納室には操舵用直流モータ13が設置されている。また、車体90には、モータ・機構格納室の上側を閉塞するカバーが取外し自在に取り付けられている。なお、モータ格納室と機構格納室とを区画し、モータ格納室と機構格納室とを上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
【0040】
操舵用直流モータ13としては正転・逆転(正逆転)可能なモータが用いられている。操舵用直流モータ13は、モータケースから軸13aが車体90の後方に向けて突出するように、モータ・機構格納室に設置されている。図8(A),(B)に示すように、軸13aにはクラッチ機構63を介して歯車(ピニオン歯車)64が設けられている。クラッチ機構63は、円板(保持板)63a、クラッチ片63b及び外筒63cを含んで構成されている。すなわち、軸13aには円板63aが固定されている。この円板63aは特に限定はされないが円板状に構成されている。この円板63aの端面にはクラッチ片63bが複数設置されている。各クラッチ片63bは、軸13aの半径方向に動作自在となるように、円板63aに取り付けられている。すなわち、円板63aにはその回転中心からほぼ放射状に延びるガイド63dが形成され、このガイド63dに沿って各クラッチ片63bが軸13aの半径方向に動作自在となっている。各クラッチ片63dは外端側が少なくとも棒状に構成されている。そして、円板63aが回転した際に、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作するように構成されている。
一方、外筒63cは、円板63a及びクラッチ片63dを軸13aの半径方向外方から囲繞するような周壁を有している。そして、操舵用直流モータ13の動力によって円板6
3aが回転し、各クラッチ片63dに作用する遠心力によって、各クラッチ片63dが軸13aの半径方向外方へ向けて動作し、各クラッチ片63dが外筒63cの周壁内面に圧接されて、円板63aと外筒63cが一体的に回転されるようになっている。なお、円板63aが回転していない状態では、円板63aに対して外筒63cは空回り自在となっている。
【0041】
歯車64は、操舵アーム69に形成されたラック歯69aに噛合している。その結果、操舵用直流モータ13の動力によって歯車64が正方向又は逆方向に回転すると、その回転方向に応じて操舵アーム69は左右に動作することとなる。
【0042】
なお、この実施形態では、操舵アーム69を操舵用直流モータ13によって歯車機構を介して動作させるようにしたが、操舵アーム69を電磁石によって左右に動作させるように構成してもよい。すなわち、操舵アーム69に永久磁石又はコイルの一方を付設する一方で、車体90の固定部分に永久磁石又はコイルの他方を付設し、コイルの通電制御を行うことによって操舵アーム69を左右に動作させるように構成してもよい。
【0043】
(走行用直流モータ)
車体90の後部にはモータ及び機構格納部71を備え、このモータ及び機構格納部71の内部は図9に示すようにモータ格納室71aと機構格納室71bとに区画されている。そして、モータ格納室71aには走行用直流モータ4が設置されている。
走行用直流モータ4としては正転・逆転(正逆転)可能なモータが用いられている。走行用直流モータ4は、モータケースから軸4aが車体90の幅方向に向けて突出するように、モータ格納室71aに設置されている。軸4aには歯車(モータピニオン)81aが設けられている。歯車81aは、モータ格納室71aに走行用直流モータ4の本体を設置した際に機構格納室71bに臨むような位置に設けられている。走行用直流モータ4のモータケース4bには外周面に2つの端子4c,4dが設けられている。
一方、モータ格納室71aの床はプリント配線板74によって構成されている。プリント配線板74の表面には、前記した端子4b,4cに対応する場所に電極パターン74a,74bが形成されている。電極パターン74a,74bはプリント配線板74に印刷又は蒸着によって形成されている。
そして、プリント配線板74の上に走行用直流モータ4を載置した際に端子4c,4dと電極パターン74a,74bとが電気的に接続され、走行用直流モータ4に給電できるようにされている。
なお、プリント配線板74は平板状となっていてもよいし、上側に凹となるように湾曲していてもよい。要は、モータケースに対応した形状となっており、端子4c,4dと電極パターン74a,74bが確実に当接されればよい。
以上の構造を持つ走行玩具100によれば、電極パターン74a,74bを形成したプリント配線板74を使用しているので、走行玩具100の組立てが極めて容易となる。すなわち、プリント配線板74を使用しない場合には、車体側に電極板(導電板)を1枚1枚組み付けたり電気的接続するにあたって導線の半田付けを行うなどの細かい作業が必要となるのに対して、電極パターン74a,74bを形成したプリント配線板74を使用する場合には、組立てにあたってプリント配線板74を車体に組み付ければよいので、走行玩具100の組立て極めて容易となる。
また、導線を使用する場合には電気的接続にあたつて、配線を間違えたりする危険性があるが、端子が電極パターン74a,74bに当接することによって直ちに電気的接続がなされるので、その心配はない。
【0044】
(走行機構)
機構格納室71bには、走行用直流モータ4の走行トルクを各後輪21L,21Rに伝達するための走行機構80が設置されている。走行機構80は前記歯車81aを含む歯車
機構81によって構成されている。
すなわち、機構格納室71bには軸4aに平行な軸82が延在している。図10に示すように、軸82には歯車81bが軸82に対して空回り自在に設けられている。歯車81bは軸82の軸線方向に移動自在に構成されている。そして、この歯車81bの左右位置には歯車81Lc,81Rcが一体的に設けられている。
また、機構格納室71bには軸82に平行な軸(後輪車軸)83が延在している。軸83には歯車82Ld,82Rdが固定して設けられている。この歯車82Ld,82Rdには、歯車81bが軸82の軸線方向に移動した際に、その移動方向に応じて歯車81Lc,81Rcが択一的に噛合するようになっている。具体的には、歯車81bが軸82の軸線方向左に動作した際には歯車81Lcが歯車82Ldに噛合し、一方、歯車81bが軸82の軸線方向右に動作した際には歯車81Rcが歯車82Rdに噛合するようになっている。そして、この歯車の噛合状態を変更することによって、走行トルクを変えることができる。
なお、歯車81bを軸82の軸線方向に移動させるために、車体90の下側には図示しない操作摘みが付設され、この操作摘みの操作によってレバー84を左右に移動させ、そのレバー84の2つの爪84a,84bに間に位置する歯車81bが左右に押されて歯車の噛合状態を変えられるようになっている。
【0045】
(カバー)
図9に示すように、車体90には、モータ格納室71a及び機構格納室71bの上側を閉塞するカバー91が着脱自在に取り付けられている。このカバー91はモータ押さえとして機能する。なお、モータ格納室71a及び機構格納室71bの上側から個別に閉塞するためにそれぞれ別のカバーを設けてもよい。
カバー91には放熱用開口91aが多数設けられている。また、カバー91には放熱板92を装着するためのスリット93が設けられている。そして、スリット93から放熱板92を着脱できるように構成されている。放熱板92としては金属、例えば銅やアルミニウムが好ましいが、放熱効果の高い形状を選択すれば合成樹脂(例えばABS樹脂)であってもよい。
以上の構造を持つ走行玩具100によれば、放熱板92の交換が簡単にでき、それによって放熱性能を簡単に変化させることができる。また、走行路の状況に応じて、重量の異なる放熱板92を使用することが可能となる。さらに、気分に応じて、色合いや形状の異なる放熱板92を使用することができる。このような種々の効果を有効に発揮させるためには、放熱性、重量、色合い、形状のいずれかが異なる複数の放熱板を用意しておき、そして、目的に合った放熱板をその中から選択して使用することが好ましい。
なお、一度に取り付ける放熱板92の数は1つに限定はされない。カバー91に2つ以上の放熱板92を取り付けられるような構造にしてもよい。
【0046】
(駆動回路及び制御回路)
走行玩具は、走行用直流モータおよび操舵用直流モータを搭載し、各直流モータの回転方向をリモコンからの電波で遠隔制御するように構成されている。
【0047】
図11に示すように、走行玩具内には、受信回路1と、制御IC2と、走行用直流モータ4を駆動する走行モータ駆動回路3と、操舵用直流モータ13を駆動する操舵モータ駆動回路8が内蔵されている。
【0048】
図示しないリモート操作装置から送信された操作信号電波は、アンテナANTを介して受信回路1で受信/復調され、制御IC2に入力される。制御IC2は、入力された操作信号に対応する制御命令信号を走行系及び/又は操舵系の制御駆動回路に送る。
【0049】
例えば、操作信号が前進命令であった場合、制御IC2は前進命令信号SFをモータ駆
動回路3に出力する。走行モータ駆動回路3は、直流モータ4に対して前進方向に対応する極性の電圧を供給する。同様に、操作信号が後退命令であった場合、制御IC2は後退命令信号SBを走行モータ駆動回路3に出力する。走行モータ駆動回路3は直流モータ4に対して後退方向に対応する極性の電圧を供給する。
【0050】
一方、操作信号が操舵制御信号で右旋回命令であった場合、制御IC2は右旋回命令信号SRを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は、直流モータ13に対して右旋回方向に対応する極性の電圧を供給する。同様に、操作信号が左旋回命令であった場合、制御IC2は左旋回命令信号SLを操舵モータ駆動回路8に出力する。操舵モータ駆動回路8は直流モータ13に対して左旋回方向に対応する極性の電圧を供給する。
【0051】
操舵モータ駆動回路8は、少なくとも2個の電池9、10が直列に接続可能な正極電源端子14及び負極電源端子15を有している。
電源電圧Vccを供給する正極電源端子14とGND電位に接続される負極電源端子15との間には、制御IC2からの左旋回命令信号SL、右旋回命令信号SRによって交互に導通(ON)又は非導通(OFF)となるPNP形トランジスタ(第1スイッチ素子)Q5及びNPN形トランジスタ(第2スイッチ素子)Q6が直列に接続されている。
【0052】
電池9、10同士の接続中点16と、トランジスタQ5とトランジスタQ6との接続中点17と、の間に操舵用直流モータ13が接続されている。
操舵用直流モータ13の回転軸には、操舵輪(前輪)に連結された操舵機構60が連結されている。操舵用直流モータ13の回転方向を切換えることにより、この操舵機構60を介して操舵輪の向きを変更することができる。
【0053】
図12に示すように、電池9、10同士の接続中点には、投入時において操舵用直流モータ13の一側の接続端子及び電池9の負極側の端子16Aと電池10の正極側の端子16Bを電気的に接続する自己保持型の電源スイッチ18が設けられている。
この電源スイッチ18を投入することにより、電池9の負側と電池10の正側が電気的に接続され、かつ操舵用直流モータ13の一方の端子が電源スイッチ18に接続されるので直列接続された電池2個分の電源電圧Vcc(例、1.5V×2=3V)が各回路1,2,3,8、に供給され、また、操舵用直流モータ13の電機子の電流路が形成される。
なお、操舵モータ駆動回路8の両端に電源電圧Vcc(例、3V)が与えられるが、操舵用直流モータ13の各回転方向で操舵用直流モータ13に与えられるのは、電源電圧Vccの1/2(1.5V)である。その理由は、後述するループL1とループL2の単位で使用する電池が異なるからである。
【0054】
(回路動作)
まず、電源スイッチ18(図12)を投入すると、電池9と10とが負極側の端子16A及び正極側の端子16Bを介して直列に接続され、かつ操舵用直流モータ13が電池9と10との接続中点16(図11)に接続される。このとき、操舵モータ駆動回路8には二つの閉ループが形成される。
【0055】
図11に示すように、一つは、電池9⇒正極電源端子14⇒トランジスタQ5⇒接続中点17⇒操舵用直流モータ13⇒接続中点16⇒電池9のループL1である。
他の一つは、電池10⇒接続中点16⇒操舵用直流モータ13⇒接続中点17⇒トランジスタQ6⇒負極電源端子15⇒電池10のループL2である。
【0056】
いま、制御IC2から左旋回命令信号SL「電位L」が与えられたとすると、トランジスタQ5がONとなり、ループL1の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する左向きに回転する。一方、制御IC2から右旋回命令信号SR「電位H
」が与えられたとすると、トランジスタQ6がONとなり、ループL1の場合とは逆向きのループL2の経路で電流が流れ、操舵用直流モータ13はその電流方向に対応する右向きに回転する。
【0057】
このように、トランジスタQ5とトランジスタQ6とは交互にON/OFF動作し、いわば相補的に動作する。そのON/OFF動作に伴って、操舵用直流モータ13に流れる電機子電流の向きが逆転し、走行玩具の進行方向を制御することができる。
【0058】
なお、複数の走行玩具100を同時に走行させる場合には、走行玩具100同士で動作周波数を変えることが行われるが、この場合、走行玩具側の動作周波数に合致したリモコンを選択して出荷することが必要となる。そこで、走行玩具100とそれに対応するリモコンとの組の選択を容易にするために、周波数動作周波数に応じてアンテナ用の導線の色を変えておくことが好ましい。
【図面の簡単な説明】
【0059】
【図1】本発明の実施形態たる走行玩具の直進状態の平面図である。
【図2】本発明の実施形態たる走行玩具の左折状態の平面図である。
【図3】本発明の実施形態たる走行玩具の操舵輪を前方に移動調節した状態の平面図である。
【図4】左側の前輪を支持する前輪支持機構の分解斜視図である。
【図5】走行玩具の正面図である。
【図6】サスペンション部材と車輪支持体の係合状態を示す要部平面図である。
【図7】サスペンション部材の位置調節を示す説明図である。
【図8】操舵用直流モータ及びクラッチ機構を示す説明図である。
【図9】走行用直流モータ及び走行機構を示す斜視図である。
【図10】走行機構を示す平面図である。
【図11】駆動回路を示す回路図である。
【図12】電源スイッチを示す回路図である。
【符号の説明】
【0060】
12 ステアリング機構
22L,22R 前輪(車輪)
30L、30R 前輪支持機構(車輪を支持する部材)
32L,32R 操舵回転体
32Lc,32Rc 係合突起
33L、33R 車輪支持体
34L、34R 支持軸(ガイド)
35L、36L、35R,36R 回動支持部(支持部)
37L、37R スペーサ(保持手段)
38L、38R サスペンション部材(緩衝体)
69 操舵アーム(操舵部材)
69Lc,69Rc 環状部
90 車体
100 走行玩具
【特許請求の範囲】
【請求項1】
左右の車輪をそれぞれ回転可能に支持する左右一対の車輪支持体と、
車体の左右の両側部に設けられ、前記各車輪支持体を前後方向に沿った軸線を中心に回動可能に支持する左右一対の回動支持部と、を備え、
前記各車輪支持体が、前記回動支持部の軸線よりも外側で前記車輪を支持すると共に、
前記各車輪支持体の前記回動支持部の軸線よりも上部に対して前記車体に反発する方向に弾性力を生じる緩衝体を備えることを特徴とする走行玩具。
【請求項2】
前記緩衝体は、前後方向に沿って移動調節可能に前記車体に設けられていることを特徴とする請求項1記載の走行玩具。
【請求項3】
前記緩衝体は、前後方向に沿って前記車体に設けられた長尺な弾性体であることを特徴とする請求項1記載の走行玩具。
【請求項4】
前記緩衝体は、前後方向に沿って並んで前記車体に設けられた複数の弾性体からなることを特徴とする請求項1記載の走行玩具。
【請求項5】
前記緩衝体は、前記各車輪支持体に設けられていることを特徴とする請求項1記載の走行玩具。
【特許請求の範囲】
【請求項1】
走行玩具の車台の左右に、前記走行玩具の前後方向に沿って延在する軸線を中心に回動可能な車輪支持体と、前記車輪支持体に設けられ前記軸線よりも前記走行玩具の幅方向外側位置で車輪を支持し回動によって該車輪の操舵を行う操舵回転体と、前記軸線よりも上方位置で且つ前記車台と前記車輪支持体との間に介在された緩衝体とを備え、前記車輪支持体が前記軸線を中心に回動し該車輪支持体における該軸線よりも上方部分が前記車台側に近接した際に、前記緩衝体は該車輪支持体を押し戻す方向の弾性力を生じるように構成されていることを特徴とする走行玩具。
【請求項2】
前記車輪支持体は前記走行玩具の前後方向に移動調節可能に構成されていることを特徴とする請求項1記載の走行玩具。
【請求項3】
前記車輪は操舵輪であり、前記操舵回転体は、前記走行玩具の幅方向に動作する操舵アームに前記走行玩具の前後方向への移動を許容するように係合され、前記車輪は、前記操舵アームが前記走行玩具の幅方向へ動作することによって操舵されるように構成されていることを特徴とする請求項1又は2記載の走行玩具。
【請求項4】
前記緩衝体は、前記走行玩具の前後方向に移動調節可能に設けられていることを特徴とする請求項1から3いずれか一項に記載の走行玩具。
【請求項1】
左右の車輪をそれぞれ回転可能に支持する左右一対の車輪支持体と、
車体の左右の両側部に設けられ、前記各車輪支持体を前後方向に沿った軸線を中心に回動可能に支持する左右一対の回動支持部と、を備え、
前記各車輪支持体が、前記回動支持部の軸線よりも外側で前記車輪を支持すると共に、
前記各車輪支持体の前記回動支持部の軸線よりも上部に対して前記車体に反発する方向に弾性力を生じる緩衝体を備えることを特徴とする走行玩具。
【請求項2】
前記緩衝体は、前後方向に沿って移動調節可能に前記車体に設けられていることを特徴とする請求項1記載の走行玩具。
【請求項3】
前記緩衝体は、前後方向に沿って前記車体に設けられた長尺な弾性体であることを特徴とする請求項1記載の走行玩具。
【請求項4】
前記緩衝体は、前後方向に沿って並んで前記車体に設けられた複数の弾性体からなることを特徴とする請求項1記載の走行玩具。
【請求項5】
前記緩衝体は、前記各車輪支持体に設けられていることを特徴とする請求項1記載の走行玩具。
【特許請求の範囲】
【請求項1】
走行玩具の車台の左右に、前記走行玩具の前後方向に沿って延在する軸線を中心に回動可能な車輪支持体と、前記車輪支持体に設けられ前記軸線よりも前記走行玩具の幅方向外側位置で車輪を支持し回動によって該車輪の操舵を行う操舵回転体と、前記軸線よりも上方位置で且つ前記車台と前記車輪支持体との間に介在された緩衝体とを備え、前記車輪支持体が前記軸線を中心に回動し該車輪支持体における該軸線よりも上方部分が前記車台側に近接した際に、前記緩衝体は該車輪支持体を押し戻す方向の弾性力を生じるように構成されていることを特徴とする走行玩具。
【請求項2】
前記車輪支持体は前記走行玩具の前後方向に移動調節可能に構成されていることを特徴とする請求項1記載の走行玩具。
【請求項3】
前記車輪は操舵輪であり、前記操舵回転体は、前記走行玩具の幅方向に動作する操舵アームに前記走行玩具の前後方向への移動を許容するように係合され、前記車輪は、前記操舵アームが前記走行玩具の幅方向へ動作することによって操舵されるように構成されていることを特徴とする請求項1又は2記載の走行玩具。
【請求項4】
前記緩衝体は、前記走行玩具の前後方向に移動調節可能に設けられていることを特徴とする請求項1から3いずれか一項に記載の走行玩具。
【図1】



【図2】
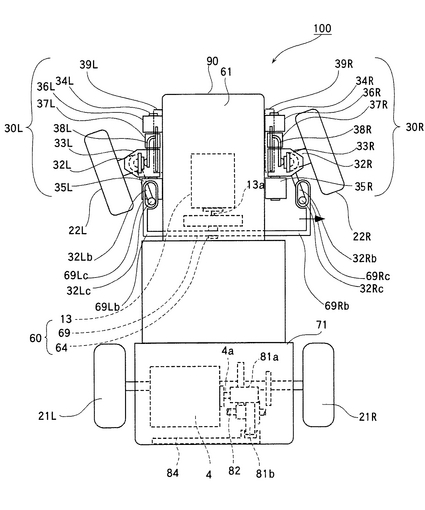
【図3】
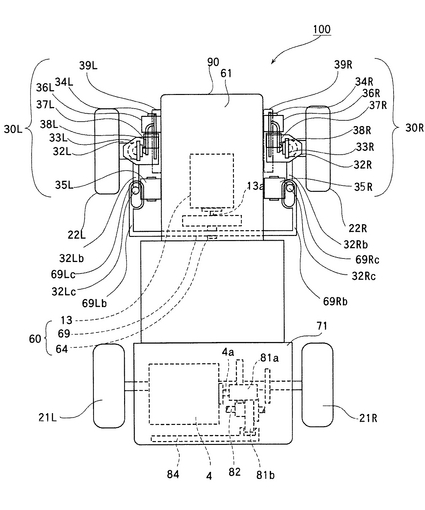
【図4】
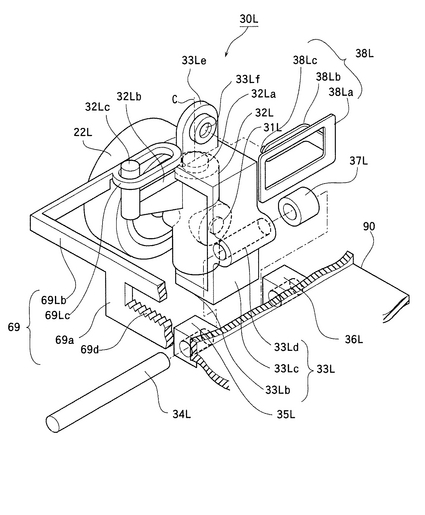
【図5】
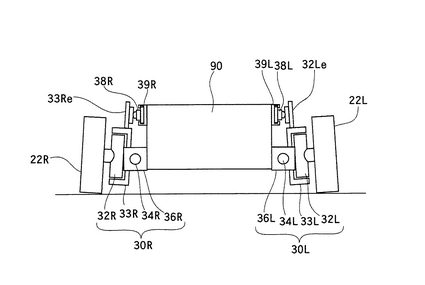
【図6】
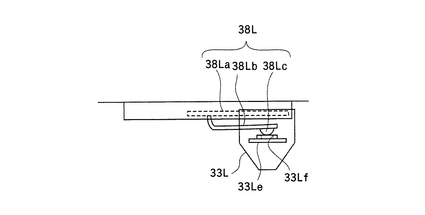
【図7】
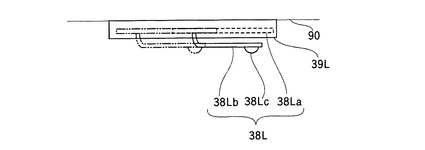
【図8】
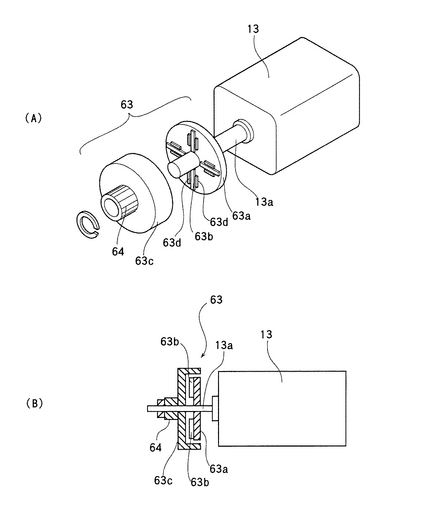
【図9】
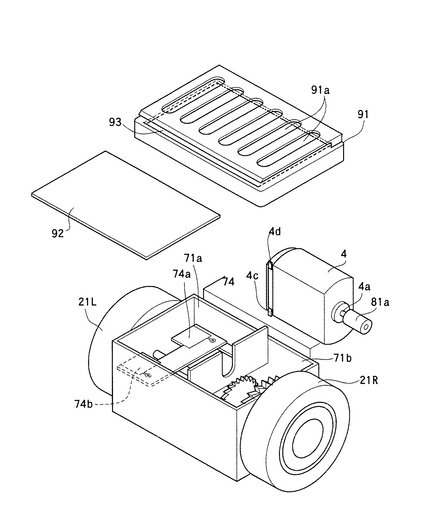
【図10】
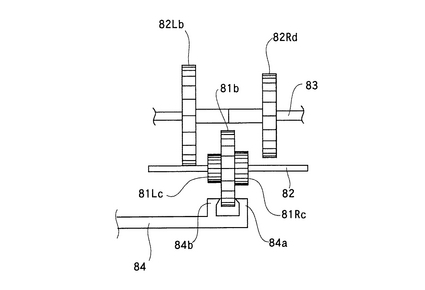
【図11】
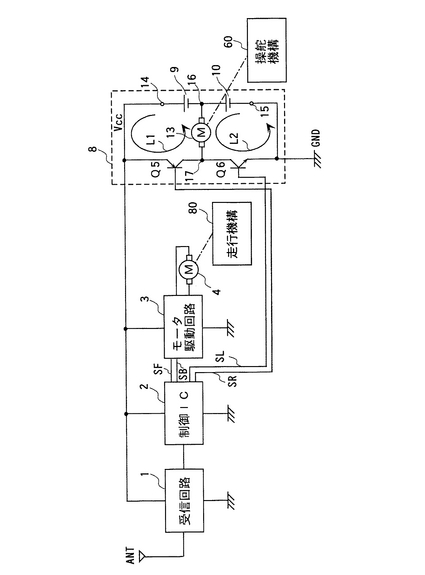
【図12】
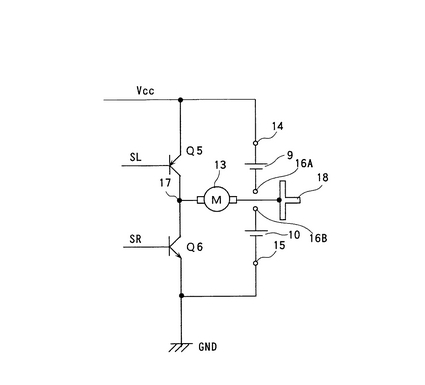
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2006−109994(P2006−109994A)
【公開日】平成18年4月27日(2006.4.27)
【国際特許分類】
【出願番号】特願2004−299102(P2004−299102)
【出願日】平成16年10月13日(2004.10.13)
【特許番号】特許第3724586号(P3724586)
【特許公報発行日】平成17年12月7日(2005.12.7)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
【公開日】平成18年4月27日(2006.4.27)
【国際特許分類】
【出願日】平成16年10月13日(2004.10.13)
【特許番号】特許第3724586号(P3724586)
【特許公報発行日】平成17年12月7日(2005.12.7)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
[ Back to top ]