
走行装置及びその制御方法
【課題】 簡単な手段で加速、減速、若しくは旋回走行時にも安定な車両の制御を行う。
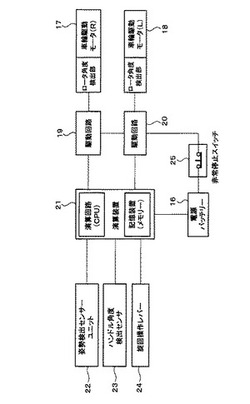
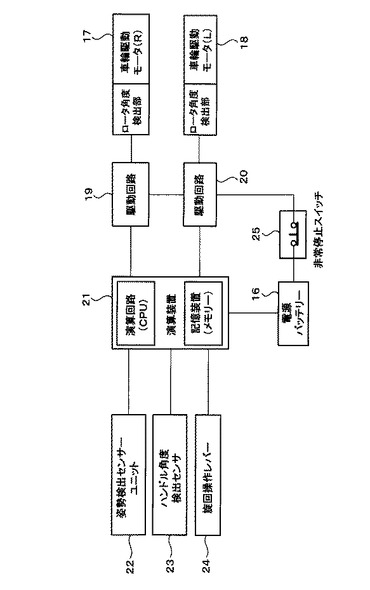
【解決手段】 ロータ角度検出部を有する右車輪駆動モータ17、左車輪駆動モータ18はそれぞれ駆動回路19、20を介して演算装置21に接続される。またバッテリー16からの電力が演算装置21及び駆動回路19、20に供給されると共に、駆動回路19、20への電力供給路には非常停止スイッチ25が設けられる。さらに、演算装置21には搬送装置の姿勢状態(ジャイロによる角速度検出軸ピッチ、ヨー、ロール、加速度センサーによる加速度検出軸X、Y、Z)を検出する姿勢検出センサーユニット22、ハンドル角度検出センサー23、旋回操作レバー24が接続される。そしてこれらの信号から、演算装置21は所定の走行状態を維持するための信号を算出して駆動回路19、20に出力し、右車輪駆動モータ17、左車輪駆動モータ18を介して車輪を駆動する。
【解決手段】 ロータ角度検出部を有する右車輪駆動モータ17、左車輪駆動モータ18はそれぞれ駆動回路19、20を介して演算装置21に接続される。またバッテリー16からの電力が演算装置21及び駆動回路19、20に供給されると共に、駆動回路19、20への電力供給路には非常停止スイッチ25が設けられる。さらに、演算装置21には搬送装置の姿勢状態(ジャイロによる角速度検出軸ピッチ、ヨー、ロール、加速度センサーによる加速度検出軸X、Y、Z)を検出する姿勢検出センサーユニット22、ハンドル角度検出センサー23、旋回操作レバー24が接続される。そしてこれらの信号から、演算装置21は所定の走行状態を維持するための信号を算出して駆動回路19、20に出力し、右車輪駆動モータ17、左車輪駆動モータ18を介して車輪を駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば同一軸心線上に配置された2個の車輪を備えた同軸二輪車に適用して好適な走行装置及びその制御方法に関する。詳しくは、車体に掛かる加減速度及び/または遠心力を求めて、走行装置の制御が良好に行われるようにしたものである。
【背景技術】
【0002】
例えば人間を搭乗させて二輪で走行する乗り物が提案されている(例えば、特許文献1参照。)。
【0003】
【特許文献1】米国特許第6288505号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
例えば、人間を搭乗させて二輪で走行する乗り物としては、上記の特許文献1に記載のような装置が提案されている。このような装置において、車両を前進、後退若しくは旋回走行させようとする場合には、車両の全体を前進、後退若しくは旋回走行しようとする方向に傾けて、その傾きをセンサーによって検出し、その検出値に基づいて車両が前進、後退若しくは旋回走行するように制御が行われる。
【0005】
ところが、上述の車両の傾斜角度を、例えば多軸加速度センサーを用いて計測している場合に、加速度センサーを搭載した車両が走行することによって生じる車両自身の加速、減速、若しくは旋回による遠心力のために、正しい傾斜角度が計測できなくなってしまう恐れがある。従って従来の技術では、静止しているとき、若しくは等速度で直進しているときしか正しい角度を計測できないものであった。
【0006】
また、加速度の影響を受けない他の種類のセンサー(例えばジャイロセンサー)を併用する方法も考えられるが、例えばジャイロセンサーでは、ジャイロのドリフトや積分誤差の蓄積などで静止しているときの正しい角度を計測できないため、加速度センサーから求められた傾斜角度とジャイロセンサーの出力を積分した角度とをフィルター処理などで合成することが行われるものであり、このような処理では充分な精度で計測を行うことができない。
【0007】
この出願はこのような点に鑑みて成されたものであって、解決しようとする問題点は、従来の技術では、車両自身の加速、減速、若しくは旋回による遠心力のために、正しい傾斜角度が計測できなくなってしまう恐れがあるというものである。
【課題を解決するための手段】
【0008】
このため本発明においては、車体の駆動の制御に関わる値から車体に掛かる加減速度及び/または遠心力を求めるようにしたものであって、こうして求められた加減速度及び/または遠心力を用いることによって、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができる。
【発明の効果】
【0009】
請求項1の発明によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保つように制御されて走行される走行装置であって、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求める手段を有することにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0010】
また、請求項2の発明によれば、走行の制御を行うためのピッチ角度センサーを有している場合に、車体の車輪の回転速度の制御値から車体に掛かる加減速度の値を求め、この算出された加減速度の値によりピッチ角度センサーの出力を補正して正しいピッチ角度を算出する手段を設けることにより、補正されたピッチ角度を用いて良好な車両の制御を行うことができるものである。
【0011】
請求項3の発明によれば、走行の制御を行うためのロール角度センサーを有している場合に、車体の2つの車輪の回転速度の制御値の差から車体の旋回速度を算出し、この旋回速度と車輪の回転速度の制御値から車体に掛かる遠心力の値を求め、この算出された遠心力の値によりロール角度センサーの出力を補正して正しいロール角度を算出する手段を設けることにより、特に旋回走行時において良好な車両の制御を行うことができるものである。
【0012】
さらに請求項4の発明によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保ちつつ走行される走行装置の制御方法であって、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求めることにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0013】
また、請求項5の発明によれば、走行の制御を行うためのピッチ角度センサーを有している場合に、車体の車輪の回転速度の制御値から車体に掛かる加減速度の値を求め、この算出された加減速度の値によりピッチ角度センサーの出力を補正して正しいピッチ角度を算出することにより、補正されたピッチ角度を用いて良好な車両の制御を行うことができるものである。
【0014】
請求項6の発明によれば、走行の制御を行うためのロール角度センサーを有している場合に、車体の2つの車輪の回転速度の制御値の差から車体の旋回速度を算出し、この旋回速度と車輪の回転速度の制御値から車体に掛かる遠心力の値を求め、この算出された遠心力の値によりロール角度センサーの出力を補正して正しいロール角度を算出することにより、特に旋回走行時において良好な車両の制御を行うことができるものである。
【0015】
これによって、従来の技術では、車両自身の加速、減速、若しくは旋回による遠心力のために、正しい傾斜角度が計測できなくなってしまう恐れがあったものを、本発明によればこれらの問題点を容易に解消することができるものである。
【発明を実施するための最良の形態】
【0016】
まず始めに、本発明が適用される本願出願人が先に提案(特願2005-117365号)した新規な同軸二輪車について、図7、図8を参照して説明する。ただし、本発明はこの先願の同軸二輪車に限定されるものではない。
【0017】
〔走行装置構成の概要〕
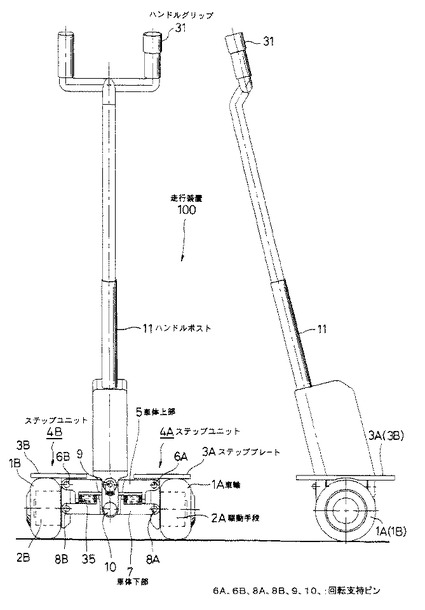
図7には走行装置(同軸二輪車)の外観を正面図及び側面図で示し、図8にはその要部を拡大して示す。この図7において、走行装置100には、平行に配置された一対の車輪1A、1Bと、車輪1A、1Bを独立に回転駆動する駆動手段2A、2Bと、これらの駆動手段2A、2Bを支持し搭乗者が搭乗するステッププレート3A、3Bを有する左右それぞれのステップユニット4A、4Bが設けられる。
【0018】
また、これらのステップユニット4A、4Bには、左右それぞれのステップユニット4A、4Bを互いに平行に可動可能に連結するための、上下に分割された車体が設けられ、この車体上部5が回転支持ピン6A、6Bを介してステッププレート3A、3Bに連結され、また車体下部7も回転支持ピン8A、8Bを介してステッププレート3A、3Bに連結されて、平行リンクを形成している。
【0019】
さらにハンドルポスト11も、回転支持ピン9(図8のピン12を含む)、及び回転支持ピン10を介して車体上部5、及び車体下部7に連結され、ステップユニット4A、4Bと平行に可動する。この時、ハンドルポスト11が自立するよう上下に分割された車体上部5と車体下部7との間にはバネ35が配置され、図7の状態を保っている。
【0020】
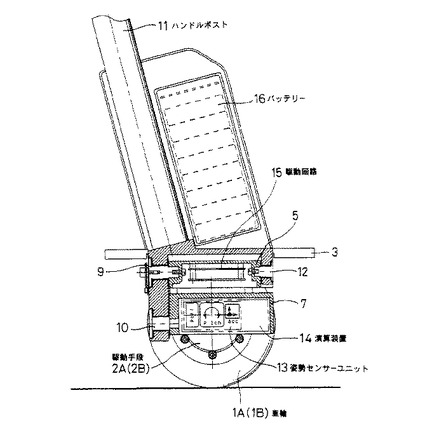
また、図8は側面より見た断面図であって、車体下部7の内部には、走行装置本体の走行時の角速度及び加速度を検出して走行装置本体の角速度及び走行加速度を制御するための、ピッチ軸、ヨー軸、ロール軸の少なくともいずれかの軸の角速度を検出するジャイロセンサーと、X軸、Y軸、Z軸の少なくともいずれかの軸の加速度を検出する加速度センサーからなる姿勢センサーユニット13が設けられている。
【0021】
そして、姿勢センサーユニット13の各姿勢検出センサーからの信号から、演算装置14を介して所定の走行状態を維持するための信号を車体上部5の内部に配置された駆動回路15に出力し、駆動手段2A(2B)によって車輪1A(1B)を駆動する走行装置100が形成される。なお、ハンドルポスト11下端付近には、走行装置100全体の電力源となるバッテリー16が配置されている。
【0022】
本発明による走行装置及びその制御方法は、上記の走行装置100に適用される。そこで、以下に図面を参照して本発明の一実施形態について説明する。図1は本発明を適用した走行装置100の回路構成を示すブロック図である。
【0023】
〔装置構成〕
すなわち図1において、ロータ角度検出部を有する右車輪駆動モータ17、左車輪駆動モータ18は、それぞれ駆動回路19、20を介して、演算回路(CPU)及び記憶装置(メモリー)の内蔵された演算装置21に接続される。なお、バッテリー16からの電力が演算装置21及び駆動回路19、20に供給されると共に、駆動回路19、20への電力供給路には、例えば図7に示したハンドルグリップ31に内蔵される非常停止スイッチ25が設けられる。
【0024】
さらに、演算装置21には搬送装置の姿勢状態(ジャイロによる角速度検出軸ピッチ、ヨー、ロール、加速度センサーによる加速度検出軸X、Y、Z)を検出する姿勢検出センサーユニット22、ハンドル角度検出センサー23、旋回操作レバー24が接続される。そしてこれらの信号から、演算装置21は所定の走行状態を維持するための信号を算出して駆動回路19、20に出力し、右車輪駆動モータ17、左車輪駆動モータ18を介して車輪(図示せず)を駆動する。
【0025】
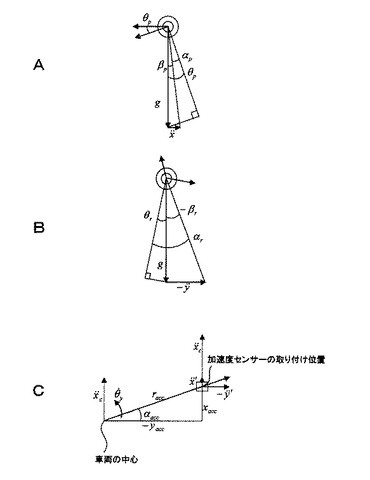
そこで上述の装置において、前傾した状態で加速を行った場合の真実の傾きθPと加速度センサーで計測されるピッチ角度αP、車両加速度x″によって発生する傾きβPの関係を図2のAに示す。すなわちこの図2のAは、車両の加速、減速時における影響を説明するものである。
【0026】
すなわち、この図2のAは、前傾しながら加速している車両を横から見た場合(ピッチ軸)であって、この場合に、真実の傾きθPは、
θP=αP+βP ………(1)
で表される。一方、車両加速度x″によって発生する傾きβPは、重力加速度を値gと置いて、
βP=tan-1(x″/g) ………(2)
で表される。
【0027】
従って、式(1)に式(2)を代入すると
θP=αP+tan-1(x″/g) ………(3)
となり、計測されたピッチ角度αPと車両加速度x″とから、真実の傾きθPを求めることができる。そして、この求められた真実の傾きθPを姿勢演算に使用することによって、加速、減速時にも安定な車両の制御を行うことができる。
【0028】
さらに、ハンドルを左に傾けながら(センサーが取り付けられている車体下部は右に傾く)前進しつつ左に旋回する場合の真実の傾きθrと加速度センサーで計測されるロール角度αr、遠心力−y″によって発生する傾き−βrの関係を図2のBに示す。すなわちこの図2のBは、車両の旋回時における遠心力の影響を説明するものである。
【0029】
すなわち、この図2のBは、ハンドルを左に傾けながら(プラットフォームは右に傾く)左旋回している車両を後ろから見た場合(ロール軸)であって、この場合に、真実の傾きθrは、
θr=αr+βr ………(4)
で表される。
【0030】
一方、車両速度x′によって発生する傾きβrは、重力加速度を値gと置いて、
βr=tan-1(y″/g) ………(5)
で表され、この遠心力y″は、旋回半径を値r、ヨーレートを値θyと置いて、
y″=r・θy2=x′・θy ………(6)
で表される。
【0031】
従って、式(4)に式(5)を代入すると
θr=αr+tan-1(y″/g) ………(7)
となり、計測されたロール角度αrと遠心力y″とから、真実の傾きθrを求めることができる。そして、この求められた真実の傾きθrを姿勢演算に使用することによって、旋回時の遠心力が発生しているときにも安定な車両の制御を行うことができる。
【0032】
なおこのとき、車両加速度x″と遠心力y″は車輪の回転速度の平均と差分から正確な値を求めることができるものであるが、車輪の車両中心と加速度センサーの取り付け位置がずれている場合は、以下に述べるように補正を行う必要がある。
【0033】
すなわち図2のCにおいて、加速度センサーにかかる加速度を値x″、遠心力を値y″と置くと、加速度の補正値X″、遠心力の補正値−Y″は、それぞれ、
X″=racc・θy2・sinαacc=θy2・xacc
Y″=racc・θy2・cosαacc=θy2・yacc
で表される。
【0034】
ただし、
x″=xc″+X″=xc″+θy2・xacc
y″=x′・θy−θy2・yacc
なお、xc″:車両中心の加速度、x′:車両中心の速度、θy:ヨーレート、yacc,xacc:車両中心から加速度センサーまでの距離
である。
【0035】
従って図2のCに示す関係により車両加速度x″と遠心力y″の補正を行い、車両の運動によって加速度センサーに生じる加速度と遠心力を求めて上記の演算に使用することができる。これによって、車輪の車両中心(三角形の左下の頂点)と加速度センサーの取り付け位置(三角形の右上の頂点)がずれている場合にも、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことが可能となる。
【0036】
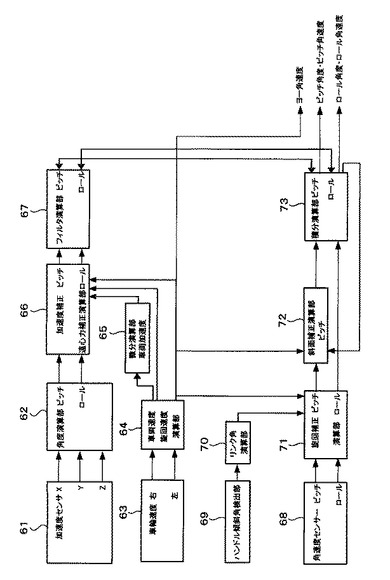
そこで図3には、上述した全ての処理を含む全体の処理の流れを機能ブロック図で示す。すなわち図3において、加速度センサー61で検出されたX、Y、Z軸の加速度が、角度演算部62に供給されてピッチ及びロールの角度が算出される。また、車輪速度検出部63で検出された左右の車輪速度が、車両速度及び旋回速度演算部64に供給されて車両速度及び旋回速度が算出される。
【0037】
そして、車両速度及び旋回速度演算部64で算出された車両速度が、微分演算部65に供給されて車両加速度が算出され、この車両加速度と、車両速度及び旋回速度演算部64からの車両速度及び旋回速度が、加速度補正及び遠心力補正演算部66に供給されて、角度演算部62で算出されたピッチ及びロールの角度の値が補正される。さらにこれらの補正されたピッチ及びロールの角度の値がフィルタ演算部67に供給される。
【0038】
一方、角速度センサー68でピッチ及びロールの角速度が検出される。また、ハンドル傾斜角検出部69で検出されたハンドル傾斜角がリンク角演算部70に供給され、算出されたリンク角と、車両速度及び旋回速度演算部64で算出された旋回速度が旋回補正演算部71に供給されて、角速度センサー68で検出されたピッチ及びロールの角速度の旋回補正が行われる。
【0039】
さらに、旋回補正演算部71で旋回補正されたピッチの角速度が、斜面補正演算部72に供給され、車両速度及び旋回速度演算部64で算出された旋回速度によって斜面補正が行われる。この斜面補正演算部72で斜面補正されたピッチの角速度と、旋回補正演算部71で旋回補正されたロールの角速度とが積分演算部73に供給される。そして、上述のフィルタ演算部67との間で相互に補正が行われる。
【0040】
これにより、積分演算部73からはピッチ角度・ピッチ角速度、ロール角度・ロール角速度が取り出される。また、車両速度及び旋回速度演算部64で算出された旋回速度はヨー角速度として取り出される。なお積分演算部73からロール角度・ロール角速度が斜面補正演算部72に供給されて、ピッチの角速度の斜面補正に用いられる。以上の処理によって、ピッチ、ロール及びヨーの角速度と、ピッチ及びロールの角度の補正が行われる。
【0041】
〔走行時の車両状態〕
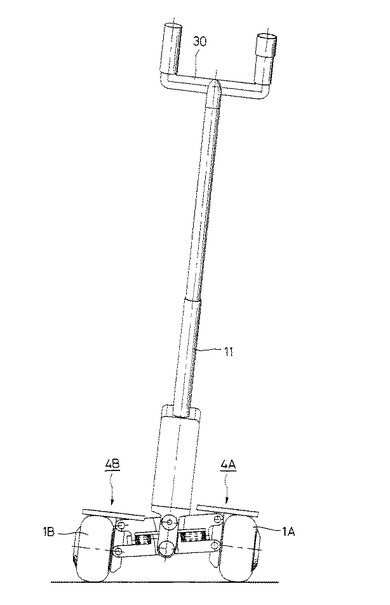
さらに図4には、このような走行装置100の旋回走行時の車両状態を示す。この図4において、搭乗者(図示せず)がハンドル30及び上体を旋回中心側(内側)に傾斜させる事により、ステップユニット4A、4Bと車輪2A、2Bはハンドル30(ハンドルポスト11)と平行に傾斜し、搭乗者を含めた車両全体が遠心力に対抗する状態になる。
【0042】
そこで図4に示すような傾斜姿勢をとって旋回を行った場合には、図1の姿勢センサーユニット22が旋回面に対して傾くことになり、旋回成分がヨー軸の角速度検出センサーだけでなくピッチ軸、ロール軸の角速度検出センサーに対しても感度を与えてしまう。その結果、旋回を続けていると「ピッチ軸が傾いた」という偽の信号を出力し、前後のバランスが取ることができなくなってしまうような望ましくない現象が発生する。
【0043】
これに対して、上述した本発明による走行装置及びその制御方法によれば、計測されたロール角度αrと遠心力y″とから、真実の傾きθrを求めることができる。そして、この求められた真実の傾きθrを姿勢演算に使用することによって、旋回時の遠心力が発生しているときにも安定な車両の制御を行うことができる。
【0044】
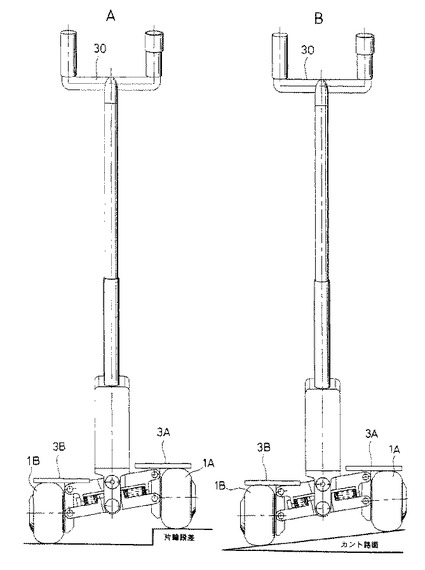
さらに、上述した本発明の走行装置及びその制御方法によれば、図5A、5Bに示すように、片輪段差乗り上げやカント路面等ロール軸方向(進行方向に対し左右方向)の路面変化の場合で、直進走行時搭乗者がハンドル30を垂直に保つことによりステッププレート3A、3Bは左右に傾かず、水平のまま左右のステッププレート3A、3Bの高さ方向で吸収出来、乗車状態が立位姿勢等重心の高い状態でも上体が左右に振られず安定して操縦および走行が可能となる。
【0045】
ところがこの場合に、旋回速度成分をロール軸の検出角を元に決定している場合には、旋回をしようとするとロール軸の検出角が狂ってしまい、車体を傾けているのに旋回が止まってしまう、車体を傾けていないのに旋回が止まらなくなってしまう、などの望ましくない現象が発生する。
【0046】
そこで上述したように計測されたピッチ角度αPと車両加速度x″とから、真実の傾きθPを求めることにより、ロール角速度センサーに混入するヨーレートが求められる。そして、これを引くことにより真実のロール角速度を求めることができ、これを積分することで真実のロール角度を計測することが可能となる。
【0047】
このようにして、カント路面や片輪段差乗り上げ等ロール軸方向(進行方向に対し左右方向)の路面変化では、ステッププレートは左右に傾かず、水平のまま左右のステッププレートの高さ方向で吸収することが出来、乗車状態が立位姿勢等重心の高い状態でも上体が左右に振られず安定して操縦および走行が可能である。しかも、斜め方向から段差を乗り上げようとした場合、歩行時の段差上りの如く左右の足にかける重心移動を行うことにより少ない駆動パワーで段差上りが可能である。
【0048】
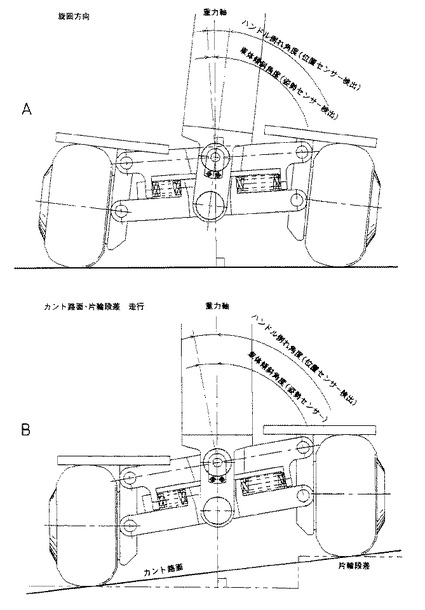
なお図6には、旋回走行時と、カント路面あるいは片輪段差乗り上げ走行時とにおけるハンドル倒れ角度(位置センサー検出)と車体傾斜角度(姿勢センサー検出)の関係を示す。
【0049】
こうして本発明の走行装置によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保つように制御されて走行され、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求める手段を有することにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0050】
また、本発明の走行装置の制御方法によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保ちつつ走行される場合に、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求めることにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0051】
なお本発明は、上述の説明した実施形態に限定されるものではなく、本発明の精神を逸脱することなく種々の変形が可能とされるものである。
【図面の簡単な説明】
【0052】
【図1】本発明による走行装置及びその制御方法を適用した走行装置の回路構成を示すブロック図である。
【図2】その動作のアルゴリズムの説明のための線図である。
【図3】その全ての処理を行う場合の処理の流れを示す機能ブロック図である。
【図4】その説明のための線図である。
【図5】その説明のための線図である。
【図6】その説明のための線図である。
【図7】本願出願人が先に提案した新規な同軸二輪車の説明のための図である。
【図8】本願出願人が先に提案した新規な同軸二輪車の説明のための図である。
【符号の説明】
【0053】
16…バッテリー、17…右車輪駆動モータ、18…左車輪駆動モータ、19,20…駆動回路、21…演算装置、22…姿勢検出センサーユニット、23…ハンドル角度検出センサー、24…旋回操作レバー、25…非常停止スイッチ
【技術分野】
【0001】
本発明は、例えば同一軸心線上に配置された2個の車輪を備えた同軸二輪車に適用して好適な走行装置及びその制御方法に関する。詳しくは、車体に掛かる加減速度及び/または遠心力を求めて、走行装置の制御が良好に行われるようにしたものである。
【背景技術】
【0002】
例えば人間を搭乗させて二輪で走行する乗り物が提案されている(例えば、特許文献1参照。)。
【0003】
【特許文献1】米国特許第6288505号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
例えば、人間を搭乗させて二輪で走行する乗り物としては、上記の特許文献1に記載のような装置が提案されている。このような装置において、車両を前進、後退若しくは旋回走行させようとする場合には、車両の全体を前進、後退若しくは旋回走行しようとする方向に傾けて、その傾きをセンサーによって検出し、その検出値に基づいて車両が前進、後退若しくは旋回走行するように制御が行われる。
【0005】
ところが、上述の車両の傾斜角度を、例えば多軸加速度センサーを用いて計測している場合に、加速度センサーを搭載した車両が走行することによって生じる車両自身の加速、減速、若しくは旋回による遠心力のために、正しい傾斜角度が計測できなくなってしまう恐れがある。従って従来の技術では、静止しているとき、若しくは等速度で直進しているときしか正しい角度を計測できないものであった。
【0006】
また、加速度の影響を受けない他の種類のセンサー(例えばジャイロセンサー)を併用する方法も考えられるが、例えばジャイロセンサーでは、ジャイロのドリフトや積分誤差の蓄積などで静止しているときの正しい角度を計測できないため、加速度センサーから求められた傾斜角度とジャイロセンサーの出力を積分した角度とをフィルター処理などで合成することが行われるものであり、このような処理では充分な精度で計測を行うことができない。
【0007】
この出願はこのような点に鑑みて成されたものであって、解決しようとする問題点は、従来の技術では、車両自身の加速、減速、若しくは旋回による遠心力のために、正しい傾斜角度が計測できなくなってしまう恐れがあるというものである。
【課題を解決するための手段】
【0008】
このため本発明においては、車体の駆動の制御に関わる値から車体に掛かる加減速度及び/または遠心力を求めるようにしたものであって、こうして求められた加減速度及び/または遠心力を用いることによって、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができる。
【発明の効果】
【0009】
請求項1の発明によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保つように制御されて走行される走行装置であって、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求める手段を有することにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0010】
また、請求項2の発明によれば、走行の制御を行うためのピッチ角度センサーを有している場合に、車体の車輪の回転速度の制御値から車体に掛かる加減速度の値を求め、この算出された加減速度の値によりピッチ角度センサーの出力を補正して正しいピッチ角度を算出する手段を設けることにより、補正されたピッチ角度を用いて良好な車両の制御を行うことができるものである。
【0011】
請求項3の発明によれば、走行の制御を行うためのロール角度センサーを有している場合に、車体の2つの車輪の回転速度の制御値の差から車体の旋回速度を算出し、この旋回速度と車輪の回転速度の制御値から車体に掛かる遠心力の値を求め、この算出された遠心力の値によりロール角度センサーの出力を補正して正しいロール角度を算出する手段を設けることにより、特に旋回走行時において良好な車両の制御を行うことができるものである。
【0012】
さらに請求項4の発明によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保ちつつ走行される走行装置の制御方法であって、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求めることにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0013】
また、請求項5の発明によれば、走行の制御を行うためのピッチ角度センサーを有している場合に、車体の車輪の回転速度の制御値から車体に掛かる加減速度の値を求め、この算出された加減速度の値によりピッチ角度センサーの出力を補正して正しいピッチ角度を算出することにより、補正されたピッチ角度を用いて良好な車両の制御を行うことができるものである。
【0014】
請求項6の発明によれば、走行の制御を行うためのロール角度センサーを有している場合に、車体の2つの車輪の回転速度の制御値の差から車体の旋回速度を算出し、この旋回速度と車輪の回転速度の制御値から車体に掛かる遠心力の値を求め、この算出された遠心力の値によりロール角度センサーの出力を補正して正しいロール角度を算出することにより、特に旋回走行時において良好な車両の制御を行うことができるものである。
【0015】
これによって、従来の技術では、車両自身の加速、減速、若しくは旋回による遠心力のために、正しい傾斜角度が計測できなくなってしまう恐れがあったものを、本発明によればこれらの問題点を容易に解消することができるものである。
【発明を実施するための最良の形態】
【0016】
まず始めに、本発明が適用される本願出願人が先に提案(特願2005-117365号)した新規な同軸二輪車について、図7、図8を参照して説明する。ただし、本発明はこの先願の同軸二輪車に限定されるものではない。
【0017】
〔走行装置構成の概要〕
図7には走行装置(同軸二輪車)の外観を正面図及び側面図で示し、図8にはその要部を拡大して示す。この図7において、走行装置100には、平行に配置された一対の車輪1A、1Bと、車輪1A、1Bを独立に回転駆動する駆動手段2A、2Bと、これらの駆動手段2A、2Bを支持し搭乗者が搭乗するステッププレート3A、3Bを有する左右それぞれのステップユニット4A、4Bが設けられる。
【0018】
また、これらのステップユニット4A、4Bには、左右それぞれのステップユニット4A、4Bを互いに平行に可動可能に連結するための、上下に分割された車体が設けられ、この車体上部5が回転支持ピン6A、6Bを介してステッププレート3A、3Bに連結され、また車体下部7も回転支持ピン8A、8Bを介してステッププレート3A、3Bに連結されて、平行リンクを形成している。
【0019】
さらにハンドルポスト11も、回転支持ピン9(図8のピン12を含む)、及び回転支持ピン10を介して車体上部5、及び車体下部7に連結され、ステップユニット4A、4Bと平行に可動する。この時、ハンドルポスト11が自立するよう上下に分割された車体上部5と車体下部7との間にはバネ35が配置され、図7の状態を保っている。
【0020】
また、図8は側面より見た断面図であって、車体下部7の内部には、走行装置本体の走行時の角速度及び加速度を検出して走行装置本体の角速度及び走行加速度を制御するための、ピッチ軸、ヨー軸、ロール軸の少なくともいずれかの軸の角速度を検出するジャイロセンサーと、X軸、Y軸、Z軸の少なくともいずれかの軸の加速度を検出する加速度センサーからなる姿勢センサーユニット13が設けられている。
【0021】
そして、姿勢センサーユニット13の各姿勢検出センサーからの信号から、演算装置14を介して所定の走行状態を維持するための信号を車体上部5の内部に配置された駆動回路15に出力し、駆動手段2A(2B)によって車輪1A(1B)を駆動する走行装置100が形成される。なお、ハンドルポスト11下端付近には、走行装置100全体の電力源となるバッテリー16が配置されている。
【0022】
本発明による走行装置及びその制御方法は、上記の走行装置100に適用される。そこで、以下に図面を参照して本発明の一実施形態について説明する。図1は本発明を適用した走行装置100の回路構成を示すブロック図である。
【0023】
〔装置構成〕
すなわち図1において、ロータ角度検出部を有する右車輪駆動モータ17、左車輪駆動モータ18は、それぞれ駆動回路19、20を介して、演算回路(CPU)及び記憶装置(メモリー)の内蔵された演算装置21に接続される。なお、バッテリー16からの電力が演算装置21及び駆動回路19、20に供給されると共に、駆動回路19、20への電力供給路には、例えば図7に示したハンドルグリップ31に内蔵される非常停止スイッチ25が設けられる。
【0024】
さらに、演算装置21には搬送装置の姿勢状態(ジャイロによる角速度検出軸ピッチ、ヨー、ロール、加速度センサーによる加速度検出軸X、Y、Z)を検出する姿勢検出センサーユニット22、ハンドル角度検出センサー23、旋回操作レバー24が接続される。そしてこれらの信号から、演算装置21は所定の走行状態を維持するための信号を算出して駆動回路19、20に出力し、右車輪駆動モータ17、左車輪駆動モータ18を介して車輪(図示せず)を駆動する。
【0025】
そこで上述の装置において、前傾した状態で加速を行った場合の真実の傾きθPと加速度センサーで計測されるピッチ角度αP、車両加速度x″によって発生する傾きβPの関係を図2のAに示す。すなわちこの図2のAは、車両の加速、減速時における影響を説明するものである。
【0026】
すなわち、この図2のAは、前傾しながら加速している車両を横から見た場合(ピッチ軸)であって、この場合に、真実の傾きθPは、
θP=αP+βP ………(1)
で表される。一方、車両加速度x″によって発生する傾きβPは、重力加速度を値gと置いて、
βP=tan-1(x″/g) ………(2)
で表される。
【0027】
従って、式(1)に式(2)を代入すると
θP=αP+tan-1(x″/g) ………(3)
となり、計測されたピッチ角度αPと車両加速度x″とから、真実の傾きθPを求めることができる。そして、この求められた真実の傾きθPを姿勢演算に使用することによって、加速、減速時にも安定な車両の制御を行うことができる。
【0028】
さらに、ハンドルを左に傾けながら(センサーが取り付けられている車体下部は右に傾く)前進しつつ左に旋回する場合の真実の傾きθrと加速度センサーで計測されるロール角度αr、遠心力−y″によって発生する傾き−βrの関係を図2のBに示す。すなわちこの図2のBは、車両の旋回時における遠心力の影響を説明するものである。
【0029】
すなわち、この図2のBは、ハンドルを左に傾けながら(プラットフォームは右に傾く)左旋回している車両を後ろから見た場合(ロール軸)であって、この場合に、真実の傾きθrは、
θr=αr+βr ………(4)
で表される。
【0030】
一方、車両速度x′によって発生する傾きβrは、重力加速度を値gと置いて、
βr=tan-1(y″/g) ………(5)
で表され、この遠心力y″は、旋回半径を値r、ヨーレートを値θyと置いて、
y″=r・θy2=x′・θy ………(6)
で表される。
【0031】
従って、式(4)に式(5)を代入すると
θr=αr+tan-1(y″/g) ………(7)
となり、計測されたロール角度αrと遠心力y″とから、真実の傾きθrを求めることができる。そして、この求められた真実の傾きθrを姿勢演算に使用することによって、旋回時の遠心力が発生しているときにも安定な車両の制御を行うことができる。
【0032】
なおこのとき、車両加速度x″と遠心力y″は車輪の回転速度の平均と差分から正確な値を求めることができるものであるが、車輪の車両中心と加速度センサーの取り付け位置がずれている場合は、以下に述べるように補正を行う必要がある。
【0033】
すなわち図2のCにおいて、加速度センサーにかかる加速度を値x″、遠心力を値y″と置くと、加速度の補正値X″、遠心力の補正値−Y″は、それぞれ、
X″=racc・θy2・sinαacc=θy2・xacc
Y″=racc・θy2・cosαacc=θy2・yacc
で表される。
【0034】
ただし、
x″=xc″+X″=xc″+θy2・xacc
y″=x′・θy−θy2・yacc
なお、xc″:車両中心の加速度、x′:車両中心の速度、θy:ヨーレート、yacc,xacc:車両中心から加速度センサーまでの距離
である。
【0035】
従って図2のCに示す関係により車両加速度x″と遠心力y″の補正を行い、車両の運動によって加速度センサーに生じる加速度と遠心力を求めて上記の演算に使用することができる。これによって、車輪の車両中心(三角形の左下の頂点)と加速度センサーの取り付け位置(三角形の右上の頂点)がずれている場合にも、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことが可能となる。
【0036】
そこで図3には、上述した全ての処理を含む全体の処理の流れを機能ブロック図で示す。すなわち図3において、加速度センサー61で検出されたX、Y、Z軸の加速度が、角度演算部62に供給されてピッチ及びロールの角度が算出される。また、車輪速度検出部63で検出された左右の車輪速度が、車両速度及び旋回速度演算部64に供給されて車両速度及び旋回速度が算出される。
【0037】
そして、車両速度及び旋回速度演算部64で算出された車両速度が、微分演算部65に供給されて車両加速度が算出され、この車両加速度と、車両速度及び旋回速度演算部64からの車両速度及び旋回速度が、加速度補正及び遠心力補正演算部66に供給されて、角度演算部62で算出されたピッチ及びロールの角度の値が補正される。さらにこれらの補正されたピッチ及びロールの角度の値がフィルタ演算部67に供給される。
【0038】
一方、角速度センサー68でピッチ及びロールの角速度が検出される。また、ハンドル傾斜角検出部69で検出されたハンドル傾斜角がリンク角演算部70に供給され、算出されたリンク角と、車両速度及び旋回速度演算部64で算出された旋回速度が旋回補正演算部71に供給されて、角速度センサー68で検出されたピッチ及びロールの角速度の旋回補正が行われる。
【0039】
さらに、旋回補正演算部71で旋回補正されたピッチの角速度が、斜面補正演算部72に供給され、車両速度及び旋回速度演算部64で算出された旋回速度によって斜面補正が行われる。この斜面補正演算部72で斜面補正されたピッチの角速度と、旋回補正演算部71で旋回補正されたロールの角速度とが積分演算部73に供給される。そして、上述のフィルタ演算部67との間で相互に補正が行われる。
【0040】
これにより、積分演算部73からはピッチ角度・ピッチ角速度、ロール角度・ロール角速度が取り出される。また、車両速度及び旋回速度演算部64で算出された旋回速度はヨー角速度として取り出される。なお積分演算部73からロール角度・ロール角速度が斜面補正演算部72に供給されて、ピッチの角速度の斜面補正に用いられる。以上の処理によって、ピッチ、ロール及びヨーの角速度と、ピッチ及びロールの角度の補正が行われる。
【0041】
〔走行時の車両状態〕
さらに図4には、このような走行装置100の旋回走行時の車両状態を示す。この図4において、搭乗者(図示せず)がハンドル30及び上体を旋回中心側(内側)に傾斜させる事により、ステップユニット4A、4Bと車輪2A、2Bはハンドル30(ハンドルポスト11)と平行に傾斜し、搭乗者を含めた車両全体が遠心力に対抗する状態になる。
【0042】
そこで図4に示すような傾斜姿勢をとって旋回を行った場合には、図1の姿勢センサーユニット22が旋回面に対して傾くことになり、旋回成分がヨー軸の角速度検出センサーだけでなくピッチ軸、ロール軸の角速度検出センサーに対しても感度を与えてしまう。その結果、旋回を続けていると「ピッチ軸が傾いた」という偽の信号を出力し、前後のバランスが取ることができなくなってしまうような望ましくない現象が発生する。
【0043】
これに対して、上述した本発明による走行装置及びその制御方法によれば、計測されたロール角度αrと遠心力y″とから、真実の傾きθrを求めることができる。そして、この求められた真実の傾きθrを姿勢演算に使用することによって、旋回時の遠心力が発生しているときにも安定な車両の制御を行うことができる。
【0044】
さらに、上述した本発明の走行装置及びその制御方法によれば、図5A、5Bに示すように、片輪段差乗り上げやカント路面等ロール軸方向(進行方向に対し左右方向)の路面変化の場合で、直進走行時搭乗者がハンドル30を垂直に保つことによりステッププレート3A、3Bは左右に傾かず、水平のまま左右のステッププレート3A、3Bの高さ方向で吸収出来、乗車状態が立位姿勢等重心の高い状態でも上体が左右に振られず安定して操縦および走行が可能となる。
【0045】
ところがこの場合に、旋回速度成分をロール軸の検出角を元に決定している場合には、旋回をしようとするとロール軸の検出角が狂ってしまい、車体を傾けているのに旋回が止まってしまう、車体を傾けていないのに旋回が止まらなくなってしまう、などの望ましくない現象が発生する。
【0046】
そこで上述したように計測されたピッチ角度αPと車両加速度x″とから、真実の傾きθPを求めることにより、ロール角速度センサーに混入するヨーレートが求められる。そして、これを引くことにより真実のロール角速度を求めることができ、これを積分することで真実のロール角度を計測することが可能となる。
【0047】
このようにして、カント路面や片輪段差乗り上げ等ロール軸方向(進行方向に対し左右方向)の路面変化では、ステッププレートは左右に傾かず、水平のまま左右のステッププレートの高さ方向で吸収することが出来、乗車状態が立位姿勢等重心の高い状態でも上体が左右に振られず安定して操縦および走行が可能である。しかも、斜め方向から段差を乗り上げようとした場合、歩行時の段差上りの如く左右の足にかける重心移動を行うことにより少ない駆動パワーで段差上りが可能である。
【0048】
なお図6には、旋回走行時と、カント路面あるいは片輪段差乗り上げ走行時とにおけるハンドル倒れ角度(位置センサー検出)と車体傾斜角度(姿勢センサー検出)の関係を示す。
【0049】
こうして本発明の走行装置によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保つように制御されて走行され、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求める手段を有することにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0050】
また、本発明の走行装置の制御方法によれば、それぞれが独立に駆動される2つの車輪が平行に設けられ、2つの車輪の間で前後の安定を保ちつつ走行される場合に、車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて車体の姿勢及び駆動の制御を行っている場合に、駆動の制御に関わる値から、車体に掛かる加減速度及び/または遠心力を求めることにより、加速、減速、若しくは旋回走行時にも安定な車両の制御を行うことができるものである。
【0051】
なお本発明は、上述の説明した実施形態に限定されるものではなく、本発明の精神を逸脱することなく種々の変形が可能とされるものである。
【図面の簡単な説明】
【0052】
【図1】本発明による走行装置及びその制御方法を適用した走行装置の回路構成を示すブロック図である。
【図2】その動作のアルゴリズムの説明のための線図である。
【図3】その全ての処理を行う場合の処理の流れを示す機能ブロック図である。
【図4】その説明のための線図である。
【図5】その説明のための線図である。
【図6】その説明のための線図である。
【図7】本願出願人が先に提案した新規な同軸二輪車の説明のための図である。
【図8】本願出願人が先に提案した新規な同軸二輪車の説明のための図である。
【符号の説明】
【0053】
16…バッテリー、17…右車輪駆動モータ、18…左車輪駆動モータ、19,20…駆動回路、21…演算装置、22…姿勢検出センサーユニット、23…ハンドル角度検出センサー、24…旋回操作レバー、25…非常停止スイッチ
【特許請求の範囲】
【請求項1】
それぞれが独立に駆動される2つの車輪が平行に設けられ、前記2つの車輪の間で前後の安定を保つように制御されて走行される走行装置であって、
車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて前記車体の姿勢及び駆動の制御を行っている場合に、
前記駆動の制御に関わる値から、前記車体に掛かる加減速度及び/または遠心力を求める手段を有する
ことを特徴とする走行装置。
【請求項2】
請求項1記載の走行装置において、
前記走行の制御を行うためのピッチ角度センサーを有している場合に、
前記車体の車輪の回転速度の制御値から前記車体に掛かる加減速度の値を求め、この算出された加減速度の値により前記ピッチ角度センサーの出力を補正して正しいピッチ角度を算出する手段を設ける
ことを特徴とする走行装置。
【請求項3】
請求項1記載の走行装置において、
前記走行の制御を行うためのロール角度センサーを有している場合に、
前記車体の2つの車輪の回転速度の制御値の差から前記車体の旋回速度を算出し、この旋回速度と前記車輪の回転速度の制御値から前記車体に掛かる遠心力の値を求め、この算出された遠心力の値により前記ロール角度センサーの出力を補正して正しいロール角度を算出する手段を設ける
ことを特徴とする走行装置。
【請求項4】
それぞれが独立に駆動される2つの車輪が平行に設けられ、前記2つの車輪の間で前後の安定を保ちつつ走行される走行装置の制御方法であって、
車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて前記車体の姿勢及び駆動の制御を行っている場合に、
前記駆動の制御に関わる値から、前記車体に掛かる加減速度及び/または遠心力を求める
ことを特徴とする走行装置の制御方法。
【請求項5】
請求項4記載の走行装置の制御方法において、
前記走行の制御を行うためのピッチ角度センサーを有している場合に、
前記車体の車輪の回転速度の制御値から前記車体に掛かる加減速度の値を求め、この算出された加減速度の値により前記ピッチ角度センサーの出力を補正して正しいピッチ角度を算出する
ことを特徴とする走行装置の制御方法。
【請求項6】
請求項4記載の走行装置の制御方法において、
前記走行の制御を行うためのロール角度センサーを有している場合に、
前記車体の2つの車輪の回転速度の制御値の差から前記車体の旋回速度を算出し、この旋回速度と前記車輪の回転速度の制御値から前記車体に掛かる遠心力の値を求め、この算出された遠心力の値により前記ロール角度センサーの出力を補正して正しいロール角度を算出する
ことを特徴とする走行装置の制御方法。
【請求項1】
それぞれが独立に駆動される2つの車輪が平行に設けられ、前記2つの車輪の間で前後の安定を保つように制御されて走行される走行装置であって、
車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて前記車体の姿勢及び駆動の制御を行っている場合に、
前記駆動の制御に関わる値から、前記車体に掛かる加減速度及び/または遠心力を求める手段を有する
ことを特徴とする走行装置。
【請求項2】
請求項1記載の走行装置において、
前記走行の制御を行うためのピッチ角度センサーを有している場合に、
前記車体の車輪の回転速度の制御値から前記車体に掛かる加減速度の値を求め、この算出された加減速度の値により前記ピッチ角度センサーの出力を補正して正しいピッチ角度を算出する手段を設ける
ことを特徴とする走行装置。
【請求項3】
請求項1記載の走行装置において、
前記走行の制御を行うためのロール角度センサーを有している場合に、
前記車体の2つの車輪の回転速度の制御値の差から前記車体の旋回速度を算出し、この旋回速度と前記車輪の回転速度の制御値から前記車体に掛かる遠心力の値を求め、この算出された遠心力の値により前記ロール角度センサーの出力を補正して正しいロール角度を算出する手段を設ける
ことを特徴とする走行装置。
【請求項4】
それぞれが独立に駆動される2つの車輪が平行に設けられ、前記2つの車輪の間で前後の安定を保ちつつ走行される走行装置の制御方法であって、
車体の姿勢検出センサーを設けて、検出される車体の姿勢に応じて前記車体の姿勢及び駆動の制御を行っている場合に、
前記駆動の制御に関わる値から、前記車体に掛かる加減速度及び/または遠心力を求める
ことを特徴とする走行装置の制御方法。
【請求項5】
請求項4記載の走行装置の制御方法において、
前記走行の制御を行うためのピッチ角度センサーを有している場合に、
前記車体の車輪の回転速度の制御値から前記車体に掛かる加減速度の値を求め、この算出された加減速度の値により前記ピッチ角度センサーの出力を補正して正しいピッチ角度を算出する
ことを特徴とする走行装置の制御方法。
【請求項6】
請求項4記載の走行装置の制御方法において、
前記走行の制御を行うためのロール角度センサーを有している場合に、
前記車体の2つの車輪の回転速度の制御値の差から前記車体の旋回速度を算出し、この旋回速度と前記車輪の回転速度の制御値から前記車体に掛かる遠心力の値を求め、この算出された遠心力の値により前記ロール角度センサーの出力を補正して正しいロール角度を算出する
ことを特徴とする走行装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−45331(P2007−45331A)
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願番号】特願2005−232211(P2005−232211)
【出願日】平成17年8月10日(2005.8.10)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願日】平成17年8月10日(2005.8.10)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]