
走行装置
【課題】独立した二輪の各々にサーボモータを組込んだ二輪車で、ロール軸回転自由度を有したことを特徴とする二輪車は、路面傾斜による車両本体のロール軸方向への傾斜に伴い、ハンドルもしくはステップのばね力による中立位置が垂直軸に対して変化するため、横勾配路面において安定した直進走行を行うことが困難であるという問題があった。また、車両への乗り降り時に、ステップにかかる搭乗者の荷重の左右アンバランスにより、ハンドルおよびステップに意図しない傾きが生じる問題があった。
【解決手段】ハンドルもしくはステップの位置をモータ制御することにより、横勾配のある路面で人の立ち姿勢を垂直に保ちながら、直進走行を実現する制御装置を提供する。更には傾斜路面で旋回動作を行う際、人が垂直姿勢を保ったまま旋回することを可能とする制御装置を提供する。更には、乗り降り時にハンドルおよびステップに意図しない傾きが生じない車両を提供する。
【解決手段】ハンドルもしくはステップの位置をモータ制御することにより、横勾配のある路面で人の立ち姿勢を垂直に保ちながら、直進走行を実現する制御装置を提供する。更には傾斜路面で旋回動作を行う際、人が垂直姿勢を保ったまま旋回することを可能とする制御装置を提供する。更には、乗り降り時にハンドルおよびステップに意図しない傾きが生じない車両を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば同一軸心線上に配置された2個の車輪を備えた同軸二輪車に使用して好適な走行装置に関する。詳しくは、ステッププレート及び/またはハンドルの傾斜を、傾斜駆動手段を用いて積極的に制御することにより、安定な走行が行われるようにする。なお、本発明は3個以上の車輪を有する走行装置にも適用できる。
【背景技術】
【0002】
従来の同軸二輪車では、複数のジャイロ等により車両の傾きを検出して、主にピッチ軸方向の車両の姿勢制御を行うようにしている(例えば、特許文献1参照。)。
【0003】
また、ばね等の復元力により中立位置に拘束されたハンドル若しくはステップを設け、それらの重力軸に対する絶対傾斜角度、若しくは車両のベースに対する相対傾斜角度を検出して、その大きさに応じた旋回動作が実現されるように各車輪を制御する装置もある(例えば、特許文献2参照。)。
【0004】
しかしながら、上述の特許文献には、いずれも本願発明の要旨とするステッププレート及び/またはハンドルの傾斜を積極的に制御して、安定な走行が行われるようにする技術については記載されていないものである。
【特許文献1】米国特許第5971091号公報
【特許文献2】特願2005−117365号
【発明の開示】
【発明が解決しようとする課題】
【0005】
例えば、人を搭乗させて二輪で走行する乗り物として、従来から上記の特許文献1,2等に開示されているような同軸二輪車が知られている。この内、特許文献2では、例えばばねの復元力により中立位置に拘束されたハンドルもしくはステップを用いて、それらの、重力軸に対する絶対傾斜角度、もしくは車両のベースに対する相対傾斜角度を検出し、この大きさに応じた旋回動作が実現されるように各車輪を制御している。
【0006】
ところが、このような車両により、例えば横勾配を有するカント路面を傾斜方向と直交の方向に直進走行しようとした場合には、以下に述べるような問題が生じる。
【0007】
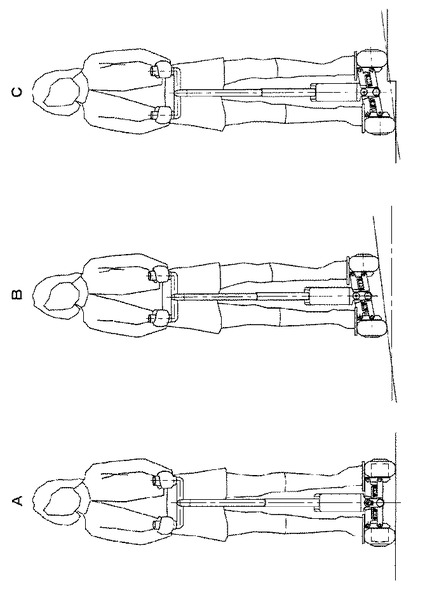
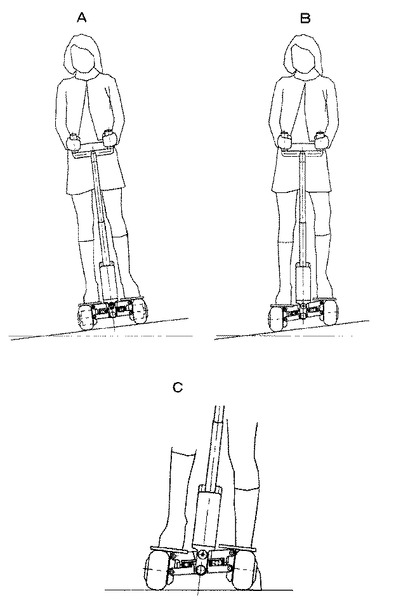
まず、絶対傾斜角度を旋回制御に用いる場合、ばね等の復元力によるハンドルの中立位置は、図21のAに示すような位置となる。そこで、車両が直進するようにハンドルの絶対角度をゼロとするためには、搭乗者がばね力に反してハンドルを能動的に傾け、図21のBに示すような状態を実現する必要がある。従ってこのような操作には、ばね力に反してハンドルを傾け続けるための体力や熟練を要する。また、搭乗者によるハンドルのコントロールが適切に行われないと、車両が意図しない挙動を行ってしてしまう問題もあった。
【0008】
一方、相対傾斜角度を旋回制御に用いる場合、搭乗者がハンドルに力を加えない図21のAに示すような状態で車両は直進するが、車両が重力軸に対して傾斜した姿勢となるため、路面の横勾配が大きい場合には搭乗者が左右のバランスをとるのが容易はでない。さらに、坂道でその場旋回動作を行おうとした場合には、車両のベース部分のロール軸方向の傾きの変化に従ってハンドルの中立角度が地面に対して変化するため、搭乗者が自身の体とハンドルとの相対位置を変化させながら車両を操作する必要が生じる。
【0009】
また、同様の車両において、乗降時に片足をステップに乗せた場合には、図21のCに示すようにステップに対する左右の荷重のアンバランスによりステップおよびハンドルが傾斜することになり、この傾斜によって旋回制御が行われてしまうことになる。このため、上述の車両には、搭乗者が乗り降りを容易に行えないという問題もあった。
【0010】
この出願はこのような点に鑑みて成されたものであって、解決しようとする問題点は、従来の装置では、例えば横勾配を有するカント路面を傾斜方向と直交の方向に直進走行しようとした場合に、熟練を要するなど操作を容易に行うことができない。また、搭乗者の乗り降りも容易に行うことができなかったというものである。
【課題を解決するための手段】
【0011】
このため本発明においては、ステップ若しくはハンドルのロール軸方向の傾斜を制御可能なようにサーボモータを実装し、本体に実装された姿勢センサおよび位置センサから重力軸に対するステップ若しくはハンドルのロール軸の傾きを算出して、ステップ若しくはハンドルの傾きが常に重力軸上に平行になるよう制御する。
【発明の効果】
【0012】
これによって、搭乗者は、路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができ、自然な旋回、直進を実施することができるようになる。
【発明を実施するための最良の形態】
【0013】
すなわち、請求項1に記載の本発明は、平行に配置された複数の車輪と、複数の車輪の間に設けられて運転者が搭乗するステッププレートと、ステッププレートに垂直に設けられたハンドルとを有する走行装置であって、ステッププレート及び/またはハンドルをロール軸方向に傾斜可能とし、ステッププレート及び/またはハンドルをロール軸方向に傾斜駆動する傾斜駆動手段及びその制御手段を設け、ステッププレート及び/またはハンドルを水平または鉛直に保つように傾斜駆動手段を制御することを特徴とする走行装置である。
【0014】
また、請求項2に記載の走行装置においては、路面の傾きを検出する検出手段を設け、検出手段で検出した傾きの値を制御手段に供給し、ステッププレート及び/またはハンドルを水平または鉛直に保つように傾斜駆動手段を制御するものである。
【0015】
また、請求項3に記載の走行装置においては、ステッププレート及び/またはハンドルの傾斜駆動手段によって保たれる水平または鉛直の中立位置からの移動操作を測定する測定手段が設けられ、測定手段の測定値に応じて複数の車輪による走行の方向転換を行うものである。
【0016】
さらに請求項4に記載の走行装置においては、ステッププレート及び/またはハンドルの移動操作に対する抵抗力を、傾斜駆動手段を制御する制御手段の制御パラメータによって調整可能とすると共に、ステッププレートに掛かる荷重を検知する荷重検知手段を設け、荷重検知手段で検知した荷重の値に応じて制御パラメータを調整するものである。
【0017】
さらに請求項5に記載の走行装置においては、荷重検知手段での荷重の検知により運転者の乗降を判断した際には抵抗力が最大値となるように制御手段の制御パラメータを調整するものである。
【0018】
また、請求項6に記載の走行装置においては、制御手段を模擬する数学モデルを用いてステッププレート及び/またはハンドルに掛かるトルクを推定する推定手段を設け、推定手段で推定したトルクの値に応じてステッププレート及び/またはハンドルが変位するように傾斜駆動手段を制御するものである。
【0019】
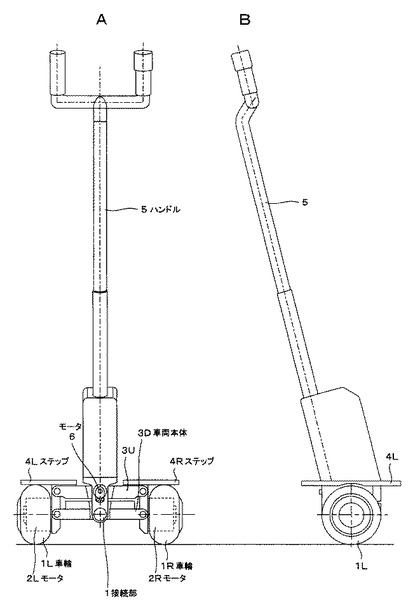
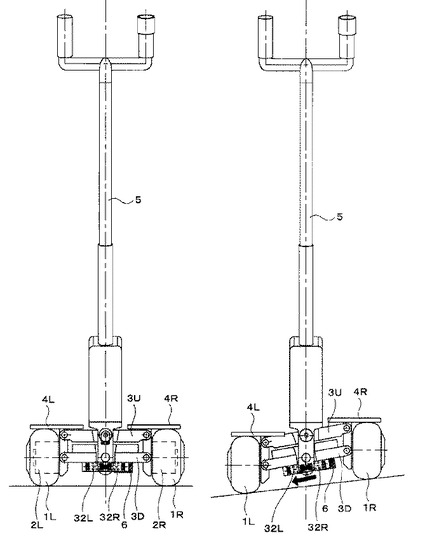
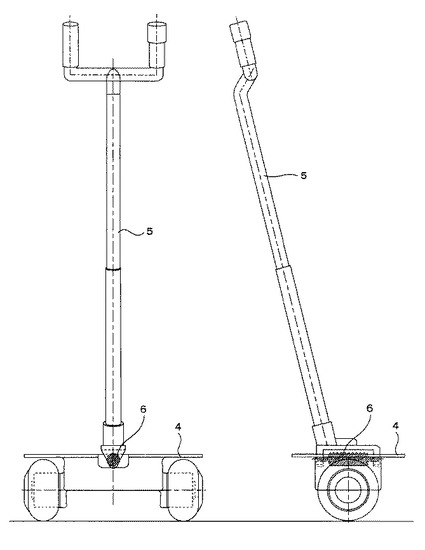
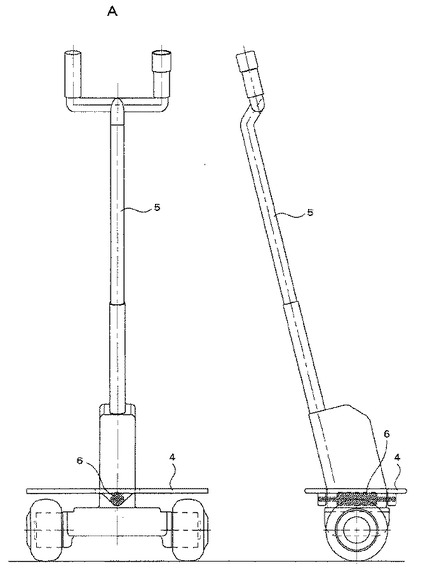
以下、図面を参照して本発明を説明する。図1のA,Bには、本発明による走行装置を適用した同軸二輪車の一実施形態の構成を正面図及び側面図で示す。なお、この図1において、全体の主な構成は特許文献2に示された装置とほぼ等しいものである。
【0020】
図1のA,Bにおいて、平行に配置された2個の車輪1L,1Rが設けられ、これらの車輪1L,1Rにはそれぞれ独立に駆動手段(モータ)2L,2Rが設けられる。また、これらの駆動手段2L,2Rの間が上下に分割された車両本体3U,3Dによって連結される。さらにこれらの車両本体3U,3Dには、図示していないがジャイロ等のセンサで検出された車両の傾きや、車両への荷重等の情報に応じて駆動手段2L,2Rの駆動を制御するための制御手段などの回路装置が設けられている。
【0021】
また、車両本体3U,3Dの上側には、運転者が搭乗するステッププレートが設けられる。このステッププレートは左右に分割されたステップ4L,4Rで表され、これらのステップ4L,4Rは常に平行になるようにリンク機構(図示せず)で連結されている。さらに、ステップ4L,4Rの間にハンドル5が設けられる。このハンドル5は車両本体3U,3Dに対してロール軸方向に傾斜可能にされると共に、ハンドル5とステップ4L,4Rとの間は、互いに垂直となるようにリンク機構(図示せず)で連結されている。
【0022】
さらに、ハンドル5と車両本体3U,3Dの接続部の内、例えば車両本体3Uとの接続部にハンドル5をロール軸方向に傾斜駆動する傾斜駆動手段としての駆動用モータ6が設けられる。また、ハンドル5と車両本体3Dとの接続部7は回動自在とされる。これにより、ハンドル5は車両本体3U,3Dの左右にずらせることで傾斜可能とされる。そして、上述の車両本体3U,3Dに設けられる制御手段(図示せず)によって、ハンドル5が常に鉛直となるように駆動用モータ6の制御が行われている。
【0023】
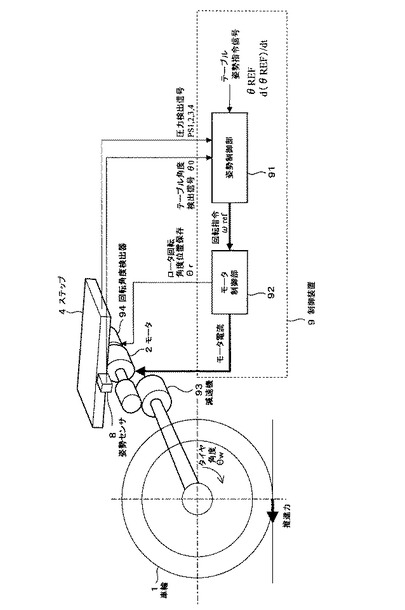
次に、一輪モデルの制御装置の具体構成を図2の模式図を用いて説明する。なお実際の二輪車両では、ステップ4のセンサは共通となる。また、図示のモデルで車輪1に連結したモータ2の制御は、図1に示した車輪1L,1Rでは、それぞれ独立した制御装置により行われているものである。
【0024】
この図2において、ステップ4に内蔵された圧力センサ(図示せず)からの圧力検出信号PS1,2,3,4と、ステップ4に連結されたジャイロセンサや加速度センサからなる姿勢センサ8からのテーブル角度検出信号θ0とが、制御装置9内の中央制御装置91に供給される。そしてこれらの検出信号PS1〜4及びθ0と、搭乗者等が発する外部からのテーブル姿勢指令信号θREF〔d(θREF)/dt〕とが演算され、算出された回転指令ωrefがモータ制御装置92に供給される。
【0025】
さらに車輪1とモータ2とは減速機93を介して接続され、モータ2には回転角検出器94が設けられる。そして、回転角検出器94からのロータ回転角度位置信号Θrが制御装置9内のモータ制御部92に供給される。これにより、上述の回転指令ωrefに応じて形成されるモータ2への駆動電流がフィードバック制御され、車輪1の駆動が安定化される。このようにして、車輪1が安定に駆動されると共に、その駆動が圧力センサ(図示せず)からの圧力検出信号PS1〜4等によって制御される。
【0026】
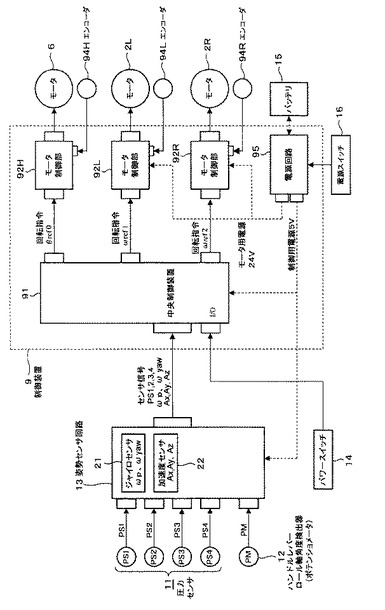
また、図3には、システムの相互の接続関係を示す。図3において、上述の圧力検出信号PS1〜4と、例えばハンドル5の接続部7に設けられるロール軸角度器(ポテンショメータ)12からのロール軸角度検出信号PMとが姿勢センサ回路13に供給される。この姿勢センサ回路13にはジャイロセンサ21と加速度センサ22が内蔵されている。これにより、姿勢センサ回路13からは、上述の信号PS1〜4と信号PM、及びピッチ角ωp、ヨー角ωyawと、X,Y,Z軸の各角度信号Ax,Ay,Azが取り出される。
【0027】
これらの信号PS1〜4、PM、ωp、ωyaw、Ax,Ay,Azが、制御装置9内の中央制御装置91に供給される。また、例えばハンドル5の把持部に設けられるパワースイッチ14からの操作信号が中央制御装置91に供給される。これにより、中央制御装置91では左右の車輪1L,1R(図示せず)の回転指令ωref1,ωref2が算出され、モータ制御部92L,92Rに供給される。また、回転角検出器94L,94Rからの信号がモータ制御部92L,92Rに供給されて、モータ2L,2Rの駆動が行われる。
【0028】
さらに、バッテリ15からの電力は電源回路95に供給される。この電源回路95からの例えば24Vモータ用電源がモータ制御部92L,92Rに供給され、例えば5V制御用電源が姿勢センサ回路13と中央制御装置91に供給される。なお、電源回路95には電源スイッチ16が設けられて、各部への電源の供給が制御される。このようにして、モータ2L,2Rの駆動が行われ、これらのモータ2L,2Rにより車輪1L,1Rが駆動されて、同軸二輪車の走行が行われる。
【0029】
そしてこのような装置において、中央制御装置91では、ハンドル5を鉛直に保持するための回転角指令θref0が算出され、駆動用モータ6の駆動を制御するモータ制御部92Hに供給される。また、駆動用モータ6に関連して設けられた回転角検出器94Hからの信号がモータ制御部92Hに供給される。これによって、中央制御装置91では、重力に対する4L,4R等の傾きが把握されているので、それを相殺するようにステップ駆動用モータ6の駆動が制御されることで、ハンドル5は常に鉛直に保持される。
【0030】
すなわち図3の制御装置において、回転検出器94L,94R,94Hを有するモータモータ2L,2R,6に接続されるモータ制御装置92L,92R,92Hには、モータ回転検出器94L,94R,94Hからのモータ回転角度と、中央制御装置91に供給される信号PS1〜4、PM、ωp、ωyaw、Ax,Ay,Azに応じた制御指令データが供給される。これによって当該モータの回転速度を算出し、その算出された回転速度に相当するトルクとなるモータ電流を形成し、タイヤ回転トルクを発生する。
【0031】
また、上記制御装置は、車両に実装されたジャイロセンサと加速度センサ信号から車両姿勢を検出するものであり、倒立振子による姿勢を制御する原理、もしくは二足歩行ロボット制御のZMP(ゼロモーメントポイント)制御の原理、あるいは、本願発明者が先に特開2005−94858号公報に開示した方法により、車両が姿勢を保つようにモータへの回転指令を演算し、モータ制御装置へ回転指令データを送信する。こうしたフィードバック制御により車両は姿勢を保ち、人の重心姿勢変化により走行することができる。
【0032】
さらにこの装置による旋回方法としては、ハンドル5のロール軸角度変化を検出し、ロール角度変化に比例して左右の車輪1L,1Rの回転速度に差を与えて制御することにより、旋回を行うことができる。
【0033】
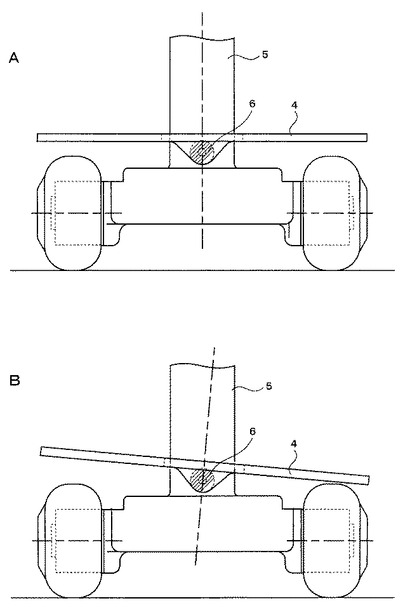
これにより、図1に示すような構造を有する車両においては、ハンドル5とステップ4L,4Rの傾きが連動しており、ハンドル5の傾斜角度が旋回制御に用いられることから、図4のAに示すように平地における走行はもちろんのこと、図4のBに示すような横傾斜面での走行や、図4のCに示すような段差部での走行においても、通常走行ではハンドル5を鉛直に保って、その状態からのハンドル5の操作によって旋回走行等の制御を容易に行うことができる。
【0034】
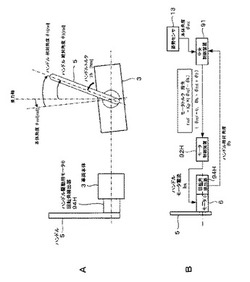
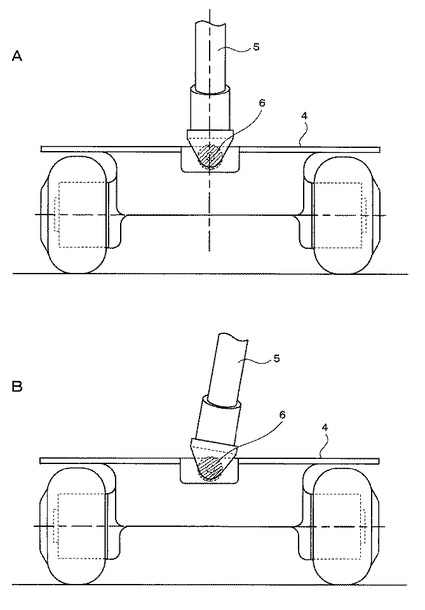
さらに、図5のAには、上述したハンドル制御装置の概観を示す。この図5のAにおいて、回転角度検出器94Hを伴うモータ6は車両本体3に連結されている。モータ6の出力軸はハンドル5に連結されており、ハンドル5のロール傾斜角度を変化させられるような構造となっている。車両本体3に対するハンドル5の相対角度θbは、モータ5の回転角度検出器94Hにより測定される。このように、本発明におけるモータ6を用いてハンドル5を地面に対して垂直に保つ制御を、「アクティブハンドル制御」と呼ぶ。
【0035】
このアクティブハンドル制御装置の制御システム構成を、図5のBに示す。図において中央制御装置91は、姿勢センサ13から得られる車両本体3のロール軸傾斜角度θrolと、モータ6の回転角度検出器94Hで測定される車両本体3に対するハンドル5の相対角度θbにより、地平面の垂直軸に対するハンドル5のロール軸方向の絶対角度θhを算出する。そしてこの絶対角度θhがゼロ、つまりハンドル5が水平面に対して垂直になるように、モータ6を制御するためのトルク指令をモータ制御装置92Hに与える。
【0036】
この結果、ハンドル5は車体のロール軸方向の傾きθrolによらず、常に水平面に垂直な状態が中立位置となる。
これにより、例えば走行時に路面の横勾配が、図4のA→B、またはA→Cのように、ゼロからある角度に変化した場合には、搭乗者がハンドルに力を加えなくても、ハンドルおよびステップはモータトルクにより水平面に対して垂直な姿勢に変化する。従って、搭乗者も体を左右に傾斜させることなく、安定した直立姿勢を保ったまま直進走行を行うことができる。
【0037】
また、旋回操作を行おうとした場合には、図5のBにおける位置制御ゲイン[Kp]と角度偏差[-θh]に応じたモータトルクによる仮想ばね力がハンドルに与えられる。このため、搭乗者は、仮想ばね力に対抗して任意の方向にハンドルを操作することにより、所望の旋回動作を実現することができる。すなわち、仮想ばね力に対抗してハンドルを操作するということは、搭乗者が意思を持ってその操作を行っていることであり、これにより、搭乗者の意図しない挙動が行われる恐れを減少させることができる。
【0038】
すなわち本発明の走行装置によれば、図5のシステムを用いることによって、ハンドルの中立位置は路面の傾斜角度に依存して変化することがなくなり、横勾配のある路面においても、容易、且つ安定した直進走行を可能することが出来る。これに加え、旋回レバーもしくはハンドルの操作により、傾斜路面においてその場旋回等の旋回動作を行う場合にも、搭乗者は体を垂直に保ったまま旋回動作を実現できるため、車両走行時の安定性を極めて向上させることができる。
【0039】
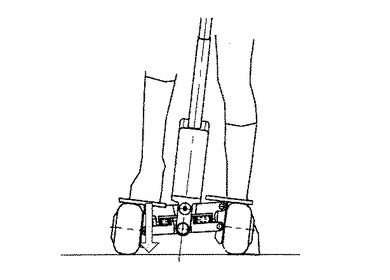
また、上述の図5のBにおける位置制御ゲイン[Kp]は、仮想ばね力のばね定数に相当するものである。そこでこのゲインの大きさを変化させることによって、ハンドルの曲げにくさを制御することが可能になる。これにより、例えば図6に示すような車両の乗り降り時の車体の傾斜を、ステップ部に設置した荷重センサ等を利用して防止し、乗降を円滑に行えるようにすることが可能である。図7には、そのような処理を実現するための、乗降時の車体傾斜防止制御のフローチャートを示す。
【0040】
図7において、アクティブハンドル制御が開始されると、ステップS1でハンドル絶対角度(θh=θrol+θb)が算出される。そして、ステップS2で左右の荷重センサは共にONであるか否か判断される。ここで共にONであるとき(Yes)は、ステップS3で位置制御ゲイン[Kp]が小さい値、例えばKp=5にされる。これに対して、ステップS2で荷重センサが共にOFF、もしくは一方のみONのとき(No)は、ステップS4で位置制御ゲイン[Kp]が大きい値、例えばKp=500にされる。
【0041】
さらに、ステップS5でハンドル駆動用モータへの指令(τref=Kp×(θd−θh))が実行される。これにより、位置制御ゲイン[Kp]は、Kp=5またはKp=500にされる。また、ステップS6ではサーボがOFFとされたか否か判断される。ここでサーボがOFFとされたとき(Yes)は、アクティブハンドル制御が終了される。一方、ステップS6でサーボがOFFとされていないとき(No)は、ステップS1に戻されて動作が繰り返される。このようにして、乗降時の車体傾斜防止制御の処理が実現される。
【0042】
従って、本発明の走行装置によれば、荷重センサの出力より、センサ出力が共にONではない場合には、搭乗者が乗降動作を行っていると判断し、位置制御ゲイン[Kp]の値を大きく設定する。これにより、同じ大きさの外力をステップもしくはハンドルに加えても、ゲインが小さい場合と比較して、ハンドル及びステップは車体に対して回転し難くなる。よって、図6のような乗降時の左右の荷重のアンバランスによるステップ及びハンドルの傾斜を軽減することができ、搭乗者は安定して車両の乗降を行うことができる。
【0043】
また、図1に示した走行装置では、電源のOFF時にもハンドル5が垂直となるようにばね10L,10Rを用いてハンドル5を支持している。このような構成は、従来の装置でも用いられているものであるが、その場合に、ばね10L,10Rのばね定数は不変である。このため、搭乗者の体重や筋力によらず、ハンドルをロール軸方向に傾斜させるために必要な力は等しくなり、特に非力な搭乗者では所望の操作を行うのに多くの体力が消耗される恐れがある。
【0044】
これに対して、本発明の走行装置によれば、搭乗者の特性に従ってハンドルのロール軸方向の剛性を変化させることにより、各人に適した操縦しやすさを提供することが可能である。すなわち、例えば荷重センサにより搭乗者の体重を検出し、この大きさに従って位置制御ゲイン[Kp]の大きさを変化させる。これにより、例えば体重が軽く、力が弱いと考えられる搭乗者に対しては、位置制御ゲイン[Kp]の値を小さくして、ハンドルを小さな力で傾けられるようにすることが可能である。
【0045】
ところで、図1に示すような車両でばね10L,10Rがない場合には、平坦路面での旋回時におけるハンドル操作に対しても、常にモータトルクにより復元力を発生させる必要が生じる。一方、図1のような車両でばね10L,10Rを併用している場合には、ばね力に抗してモータの制御を行う必要がある。このため、いずれの場合においてもバッテリの消費量が大きくなる問題が生じていた。これに対して、図8には、モータと機械的なばねを併用してハンドルを任意の中立位置に拘束するようにした実施形態の構成を示す。
【0046】
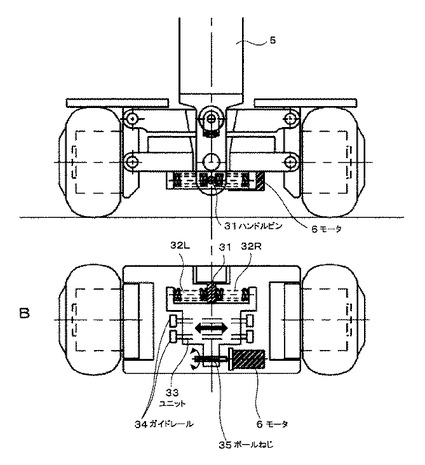
すなわち図8のAは正面図を示し、ハンドル5の下端に設けられるハンドルピン31の左右にばね32L,32Rが設けられる。さらに、図8のBは下面図を示し、上述のばね32L,32Rはユニット33に設けられ、このユニット33はガイドレール34によって左右に移動可能に配置されている。そして、このユニット33に対してボールねじ35を介してモータ6が設けられる。従って、モータ6が正逆に回転されることにより、ボールねじ35を介してユニット33が左右に移動されるものである。
【0047】
この構成において、ステップ4L,4Rはハンドル5にリンクされている。そして、旋回時のハンドル5の操作に対する復元力は、ハンドルピン31の左右に設置されたばね32L,32Rが発生する。このとき、ガイドレール34により移動方向を拘束されたばねユニット33には左右方向の力が加わるが、バックドライブ不能なボールねじ35によりばねユニット33の左右位置は固定されているため、ハンドル駆動用モータ6にトルクを与える必要はない。
【0048】
逆に、ハンドル制御用モータ6にトルクを与えて駆動することにより、ばねユニット33を左右に変位させ、ハンドルピン31の中立位置(左右のばね力の和がゼロとなるハンドル位置)を制御することができる。よって、例えば図4のように路面の横勾配が変化した場合、ハンドルの中立位置が水平面に対して垂直となるようにハンドル制御用モータ6を駆動することにより、搭乗者がハンドルおよびステップに意図的に操作力を与えなかった場合にはステップは水平に保たれ、搭乗者は安定した走行を行うことができる。
【0049】
このように、図8の実施形態では、横勾配路面等においてハンドルの中立位置を変化させる場合にのみモータ6を駆動する車体構造としているので、図1に示したような実施形態の場合と比較してモータ6で消費される電力が削減され、バッテリの消費量が軽減される。また、ボールねじ35によりハンドル駆動用モータ6が減速されるため、小型のモータを使用しても大きな並進力を得ることができるようになる。
【0050】
また、図7のステップS5で実行されるハンドル駆動用モータの制御則、
τref=Kp×(θref−θh) (1.1)
に微積分項を加え、
τref=Kp×(θref−θh)+Kd×d/dt(θref−θh)+Ki×∫(θref−θh)dt
(1.2)
とすることにより、ハンドルの挙動を改善することができる。
【0051】
すなわち、例えば旋回のためにハンドルを傾斜させた後に搭乗者がハンドルを離した場合には、従来の車両ではばね力によりハンドルが急激に戻されて中立位置付近で振動し、車両が左右に旋回して挙動が不安定となる恐れがある。しかし本発明の装置を搭載した車両で、(1.2)式右辺の第2項(微分項)を加えたアクティブハンドル制御を行った場合には、ハンドルは上記の微分項の作用により緩やかに中立位置(垂直)に復帰するため、車両の挙動が安定することになる。
【0052】
また、(1.1)式による制御を行っている場合には、ハンドルの自重により一旦傾いたハンドルは元の垂直位置に復帰できないが、(1.2)式第3項の積分項を加えることにより、自重の影響をキャンセルしてハンドルを垂直に復帰させることが可能となる。このように、本発明の走行装置によれば、アクティブハンドル制御を実施することによって、安定、かつ良好な走行装置を実現することができるものである。
【0053】
さらに従来の同軸二輪車においては、搭乗者を乗せた状態で車両の自律走行を行った場合に、旋回時の遠心力により搭乗者が外側への力を受けるため、大きな旋回速度を発生させることができない。これに対して本発明の走行装置では、アクティブハンドル制御により、自律走行時の旋回動作に合わせて車両のハンドルもしくはステップを傾斜させることができ、これにより搭乗者の重心を内側に移動させて、車両の安定性を向上させることが可能となる。
【0054】
また、図10以下には、本発明による走行装置の他の実施形態を示す。まず図10は、上述した図1〜図9の実施形態では主にハンドル5をアクティブ制御して、ステップ4L,4Rはリンク機構を介した制御としていたものを、主にステップ4L,4Rをアクティブ制御する「アクティブステップ制御」とする場合の実施形態を示している。
【0055】
そこで、図10の実施形態においては、車両本体3Uの下部に設けられたステップ駆動用モータ61を用いて、このモータ61によりベルト62を介して左右のステップ4L,4Rが連結された縦の部材63L,63Rを車両本体3Uに対して回転させる。これにより、ステップ4L,4Rが車両本体3Uに対して回転され、ステップ4L,4Rのアクティブ駆動が実現される。なおハンドル5は、ステップ4L,4Rの駆動に伴いリンク機構を介して制御される。
【0056】
さらに、図11〜図14には、ハンドル5及びステップ4をそれぞれ単独で動かす場合の実施形態を示す。これらによっても、ハンドル5及びステップ4はそれぞれアクティブ制御され、搭乗者は路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができるなど、所期の目的は達成されるものである。
【0057】
すなわち、図11はハンドル5を制御するものであって、この実施形態ではステップ4に設けられたモータ6によりハンドル5が駆動されている。これにより図12のA,Bに示すように、モータ6を駆動することでハンドル5をステップ4に対して任意の角度に制御することができる。従って搭乗者は、路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができ、自然な旋回、直進を実施することができるようになる。
【0058】
また、図13はステップ4を制御するものであって、この実施形態ではハンドル5に設けられたモータ6によりステップ4が駆動されている。これにより図14のA,Bに示すように、モータ6を駆動することでステップ4をハンドル5に対して任意の角度に制御することができる。従って搭乗者は、路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができ、自然な旋回、直進を実施することができるようになる。
【0059】
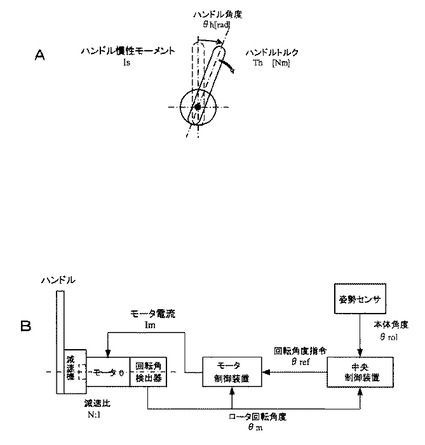
ところで、上述のハンドルが駆動されているときのハンドル慣性モーメントIsは、例えば図15のAに示すように表される。また、このハンドル慣性モーメントIsに関わる制御回路の各部の信号は図15のBに示される。さらにこのようなハンドルシステムの制御モデルは、例えば図16に示すように表すことができる。
【0060】
しかしながら、このような制御装置では、外力トルクとしてハンドルトルクThが加わると、モータ制御装置によりモータは回転角度指令と一致するようフィードバックトルクが生じてハンドルを指令角度に維持するトルクを生じさせるため、ハンドルトルクを与えてもハンドル角度変位は小さくなる。また、図15のようにハンドルとモータの間に減速機を持つ場合には、摩擦等の影響で ハンドルトルクに対する角度変位が小さくなる。
【0061】
そこでため、以下に述べる数学モデルを使った制御が必要となるものであり、本発明を用いることによって、外力により容易にハンドル角度を変位させることができる制御装置を提供することができる。以下には、そのような実施形態について説明する。
【0062】
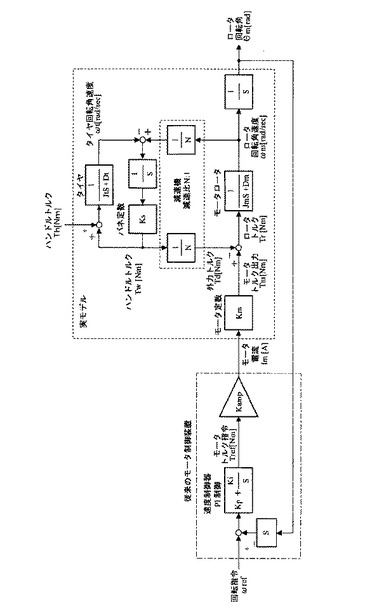
図17において、図の上部は図16に示したハンドルシステムの制御モデルと同じである。すなわち、図17の入力端子1000には回転指令ωrefが供給され、この回転指令ωrefはモータ制御装置100の減算器101を通じて速度制御器102に供給される。速度制御器102は、PI(Proportional(比例)/Integral(積分))制御を行うもので、図中に記載のように〔Kp〕の特性を有する。
【0063】
この速度制御器102の出力信号はハンドルトルク補正器103に供給される。ハンドルトルク補正器103は供給された信号に後述するコンプライアンスゲイン[Kcomp]を加算する。これによりハンドルトルク補正器103からはモータトルク指令Tref[Nm]が取り出され、このモータトルク指令Tref[Nm]が利得[Kamp]のアンプ104でモータ電流Im[A]に変換される。
【0064】
さらにアンプ104で変換されたモータ電流Im[A]は、実モデル200のモータに供給される。このモータはモータ定数[Km]201で表され、モータ定数201からはモータトルク出力Tm[Nm]が取り出される。モータトルク出力Tm[Nm]は減算器202に供給され、外力トルクTd[Nm]が減算されてロータトルクTr[Nm]が取り出される。
【0065】
ロータトルクTr[Nm]は、〔1/(JmS+Dm)〕の特性を有するモータロータ203に供給され、ロータ回転角速度ωm[rad/esc]が取り出される。そしてロータ回転角速度ωm[rad/esc]は、〔1/S〕の特性を有する演算器204に供給され、ロータ回転角Θm[rad]が算出される。この算出されたロータ回転角Θm[rad]が、出力端子2000に取り出されると共に、減算器101にフィードバックされる。
【0066】
また、演算器204からのロータ回転角Θm[rad]は、減速比N:1の減速機を構成する〔1/N〕の変換器205に供給され、減速された信号が減算器206を通じてバネ定数[Ks]207に供給されてハンドルトルクTw[Nm]に変換される。そしてバネ定数[Ks]207からのハンドルトルクTw[Nm]が、減速機を構成する〔N〕の変換器208を通じて外力トルクTd[Nm]として減算器202に供給される。
【0067】
さらに、バネ定数[Ks]207からのタイヤトルクTw[Nm]は、加算器209でハンドルトルクTh[Nm]を加算され、〔1/(JtS+Dt)〕の特性を有するハンドル210に供給される。このハンドル210の回転角速度が〔1/S〕の演算器211に供給され、ハンドル回転角度θt[rad]が取り出されて減算器206に供給される。
【0068】
これにより、実モデル200では、モータ電流Im[A]に応じてモータ定数201が駆動されると共に、モータトルク出力Tm[Nm]から外力トルクTd[Nm]が減算され、減算されたロータトルクTr[Nm]に基づいてロータ回転角Θm[rad]が取り出される。そしてこの場合に、モータトルク出力Tm[Nm]から減算される外力トルクTd[Nm]は、路面摩擦トルクFdr×r[Nm]の影響を受けており、出力端子2000には、ハンドルトルクTh[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータ回転角Θm[rad]が取り出されている。
【0069】
このような実モデル200に対して、モータ制御装置100の中に、上述の実モデル200を模擬する数学モデル300が設けられる。この数学モデル300は、実モデル200の機能を解析し、その機能をコンピュータシミュレーションにより実現するプログラムである。従って、このようなプログラムの実施形態はプログラムリスト等の形態を採るが、以下の説明は、理解をし易くする目的で、図17に示す機能ブロックを用いて行う。
【0070】
この数学モデル300において、上述のアンプ104で変換されたモータ電流Im[A]は、数学モデル300のモータモデル定数[Kmm]301に供給され、モータモデル定数301からモータトルク出力Tmm[Nm]が取り出される。モータトルク出力Tmm[Nm]は減算器302に供給され、外力推定トルクTmd[Nm]が減算されてロータモデルトルクTmr[Nm]が取り出される。
【0071】
ロータモデルトルクTmr[Nm]は、〔1/(JmmS+Dmm)〕の特性を有するモータロータモデル303に供給され、ロータモデル回転角速度ωmm[rad/esc]が取り出される。そしてロータ回転モデル角速度ωmm[rad/esc]は、〔1/S〕の特性を有する演算器304に供給され、ロータモデル回転角Θmm[rad]が算出される。この算出されたロータモデル回転角Θmm[rad]が出力端子3に取り出される。
【0072】
また、演算器304からのロータモデル回転角Θmm[rad]は、減速比N:1の減速機モデルを構成する〔1/Nm〕(ただし、Nm=N)の変換器305に供給され、減速された信号が減算器306を通じてバネモデル定数[Kms]307に供給されてハンドルモデルトルクTmw[Nm]に変換される。そしてバネモデル定数[Kms]307からのハンドルモデルトルクTmw[Nm]が、減速機モデルを構成する〔N〕の変換器308を通じて外力推定トルクTmd[Nm]として減算器302に供給される。
【0073】
さらに、バネモデル定数307からのハンドルモデルトルクTmw[Nm]は、加算器309でハンドルトルク推定値Tidr[Nm]を加算され、〔1/(JmtS+Dmt)〕の特性を有するハンドルモデル310に供給される。このハンドルモデル310の回転角速度が〔1/S〕の演算器311に供給され、ハンドルモデル回転角度θmt[rad]が取り出されて減算器306に供給される。
【0074】
これにより、数学モデル300では、モータ電流Im[A]に応じてモータモデル定数301が駆動されると共に、モータモデルトルク出力Tmm[Nm]から外力推定トルクTmd[Nm]が減算され、減算されたロータモデルトルクTmr[Nm]に基づいてロータモデル回転角Θmm[rad]が取り出される。
【0075】
そしてこの場合に、モータモデルトルク出力Tmm[Nm]から減算される外力推定トルクTmd[Nm]は、ハンドルトルク推定値Tidr[Nm]の影響を受けており、出力端子3000には、ハンドルトルク推定値Tidr[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータモデル回転角Θmm[rad]が取り出される。
【0076】
すなわち、この数学モデル300の出力端子3000には、ハンドルトルク推定値Tidr[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータモデル回転角Θmm[rad]が取り出されている。一方、実モデル200の出力端子2000には、ハンドルトルクTh[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータ回転角Θm[rad]が取り出されている。
【0077】
そこで、これらのロータモデル回転角Θmm[rad]とロータ回転角Θm[rad]とが等しくなるようにハンドルトルク推定値Tidr[Nm]を制御する。これによって、制御されたハンドルトルク推定値Tidr[Nm]をハンドルトルクFdr×r[Nm]と等しくすることができる。
【0078】
何故なら、上述の実モデル200と数学モデル300においては、ハンドルトルクTh[Nm]とハンドルトルク推定値Tidr[Nm]以外の要件は全く同じであると考えられ、ロータ回転角Θm[rad]とロータモデル回転角Θmm[rad]との差分はハンドルトルクFdr×r[Nm]とハンドルトルク推定値Tidr[Nm]との差によってのみ生じると考えられるからである。
【0079】
ただし、上述の実モデル200と数学モデル300の関係において、各要素の値は、Kmm=Km[Nm/A]、Jmm=Jm[kg/sec2]、Dmm=Dm[Nm/(rad/sec)]、Nm=N、Kms=Ks[Nm/rad]、Jmt=Jt[kg/sec2]、Dmt=Dt[Nm/(rad/sec)]とする。なおこのような制御は、モデル規範型適応制御〔Model Reference Adaptive Control〕と呼ばれているものである。
【0080】
そして上述の制御を実現するため、図17の構成では、ロータモデル回転角Θmm[rad]とロータ回転角Θm[rad]とを減算器106に供給して差分のモデルエラーEmを取り出す。そしてこのモデルエラーEmをゲイン〔Kadp+(Kadi/S)〕の推定器400に供給し、この推定器400で形成されるハンドルトルク推定値Tidr[Nm]の値を制御する。
【0081】
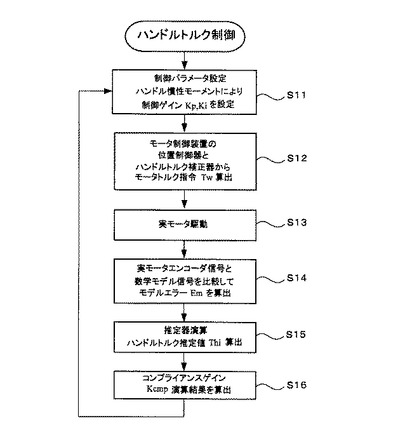
これにより、ハンドルトルクTh[Nm]と等しいハンドルトルク推定値Tidr[Nm]が取り出される。さらに図17の構成では、この取り出されたハンドルトルク推定値Tidr[Nm]を、ハンドルトルク補正器103に供給されるコンプライアンスゲインKcompの設定器107に供給し、コンプライアンスゲインKcompの設定を行う。そこで図18には、コンプライアンスゲインKcompの設定までに至るモータ制御装置100で実行される処理の実施形態をフローチャートで示す。
【0082】
図18において、ハンドルトルク制御が開始されると、最初のステップS11では制御パラメータの設定を行い、ハンドル慣性モーメントにより制御ゲインKp,Kiを設定する。次にステップS12では、モータ制御装置の位置制御器とハンドルトルク補正器からモータトルク指令Twを算出する。さらにステップS13で、モータ制御装置100の速度制御器102とスリップ防止調整器103によりモータトルク指令Trefを算出モータトルク指令Trefにより実モータを駆動する。
【0083】
また、ステップS14では、実モータのエンコーダ信号(ロータ回転角Θm[rad])と数学モデル信号(ロータモデル回転角Θmm[rad])とを比較してモデルエラーEmを算出する。そしてステップS15で、推定器400での処理によりハンドルトルク推定値Tidr[Nm]を算出する。そしてステップS16では、コンプライアンスゲインKcmp演算結果を算出する。
【0084】
従って、上述の実施形態において、ハンドル駆動の数学モデルの任意の部位の回転値と、実際のハンドル駆動の対応する部位の模擬された回転値とが等しくなるように数学モデルに印加されるハンドルトルク推定値を制御し、ハンドル駆動のモータトルクが印加されるハンドルトルク推定値を超えないようにモータトルク指令信号の大きさを制限することにより、良好にハンドルの制御を行うことができる。
【0085】
これによって、従来の装置では、例えば外力トルクとしてハンドルトルクThが加わると、モータ制御装置によりモータは回転角度指令と一致するようフィードバックトルクが生じてハンドルを指令角度に維持するトルクを生じさせるため、ハンドルトルクを与えてもハンドル角度変位は小さいなどの問題も生じていたものを、本発明によればこれらの問題点を容易に解消する手段を提供することができる。
【0086】
さらに図19には、シミュレーションによる本発明の装置の信号の様子を示す。なお図19においては、シミュレーション上でハンドルトルクを変化したとき、推定器によりハンドルトルク推定する変化を示す。本発明の装置によりハンドルトルクを正しく推定する様子を示した。
【0087】
すなわち図19において、モータ制御装置100は、減算器151、アンプ152、153、積分器154、加算器155、微分器156で構成される。また、実モデル200は、減算器251、252、アンプ253、254、255、演算器256、257、積分器258、259、加算器260で構成される。
【0088】
さらに数学モデル300も、減算器351、352、アンプ353、354、355、演算器356、357、積分器358、359、加算器360で構成される。そして推定器400は、減算器451、アンプ452、453、積分器454、加算器455で構成される。この図19で、数学モデルの各係数は実モデルと同じ値とする。
【0089】
すなわち
Kmm=Km [Nm/A]
Jmm=Jm [kg/sec^2]
Dmm=Dm [Nm/(rad/sec)]
Nm=N
Kms=Ks [Nm/rad]
Jmt=Jt [kg/sec^2]
Dmt=Dt [Nm/(rad/sec)]
Kadp,Kadiは推定器比例、積分ゲイン
である。
【0090】
このシステムでモデル誤差Emがゼロになるよう推定器を設計する。この例ではPI制御器で推定ゲインをKadp,Kadiにより推定器を設計している。こうして算出されたハンドルトルク推定値ThiはハンドルトルクThと一致する値となる。
【0091】
そして、このような装置において、例えば図中の波形図Aに示すような正弦波の信号を減算器151に供給し、図中の波形図Bの上側に示すようなステップ波形の路面摩擦トルクFdr×r[Nm]を加算器260に供給すると、図中の波形図Cに示すようなモータトルク指令Tref[Nm]が形成され、図中の波形図Dに示すようなロータ回転角Θm[rad]が取り出される。これによって、路面摩擦力推定値Tidr[Nm]は図中の波形図Bの上側に示すように変化される。
【0092】
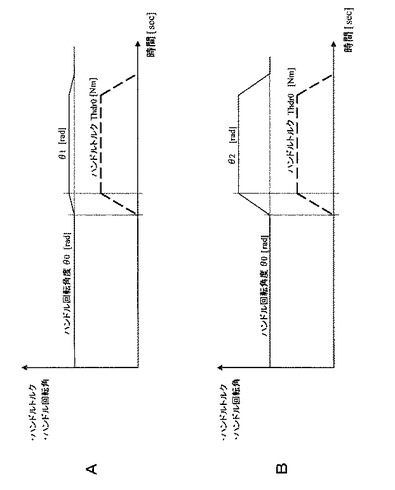
従って、このような制御が行われた場合には、例えば図20において、ハンドル回転角度θ0[rad]をθ1[rad]に変化させた場合に、従来は図20のAに示すようにハンドルトルクThdr0[Nm]を大きくしても、ハンドル回転角度にはあまり反映されなかったものを、本発明によれば、図20のBに示すようにハンドルトルクThdr0[Nm]に応じたハンドル回転角度θ2[rad]が得られ、ハンドル回転角度が所望の大きさに制御される。
【0093】
こうして本発明の走行装置によれば、平行に配置された複数の車輪と、複数の車輪の間に設けられて運転者が搭乗するステッププレートと、ステッププレートに垂直に設けられたハンドルとを有する走行装置であって、ステッププレート及び/またはハンドルをロール軸方向に傾斜可能とし、ステッププレート及び/またはハンドルをロール軸方向に傾斜駆動する傾斜駆動手段及びその制御手段を設け、ステッププレート及び/またはハンドルを水平または鉛直に保つように傾斜駆動手段を制御することにより、良好にハンドル及びステップの所定の角度とする制御を行うことができる。
【0094】
なお本発明は、上述の説明した実施形態に限定されるものではなく、本発明の精神を逸脱することなく種々の変形が可能とされるものである。
【図面の簡単な説明】
【0095】
【図1】本発明による走行装置を適用した同軸二輪車の一実施形態の構成を示す正面図及び側面図である。
【図2】一輪車モデルの制御構造図である。
【図3】その説明のためのシステム構成図である。
【図4】その動作の説明のための図である。
【図5】アクティブハンドル制御装置の説明のための図である。
【図6】その説明のための図である。
【図7】その説明のためのフローチャート図である。
【図8】同軸二輪走行車両の要部の構造図である。
【図9】その説明のための図である。
【図10】本発明による走行装置を適用した同軸二輪車の他の実施形態の構成を示す正面図及び側面図である。
【図11】本発明による走行装置を適用した同軸二輪車の他の実施形態の構成を示す正面図及び側面図である。
【図12】その説明のための図である。
【図13】本発明による走行装置を適用した同軸二輪車の他の実施形態の構成を示す正面図及び側面図である。
【図14】その説明のための図である。
【図15】減速機を用いたアクティブハンドル制御システムの構成図である。
【図16】その制御方法の説明のための図である。
【図17】ハンドルトルク推定器とハンドルコンプライアンス制御と行うシステムの構成図である。
【図18】その説明のためのフローチャート図である。
【図19】その説明のための図である。
【図20】その説明のための波形図である。
【図21】従来の技術の説明のための図である。
【符号の説明】
【0096】
1L,1R…車輪、2L,2R…駆動手段(モータ)、3U,3D…車両本体、4L,4R…ステップ、5…ハンドル、6…駆動用モータ、10L,10R…ばね、31…ハンドルピン、32L,32R…ばね、33…ユニット、34…ガイドレール、35…ボールねじ
【技術分野】
【0001】
本発明は、例えば同一軸心線上に配置された2個の車輪を備えた同軸二輪車に使用して好適な走行装置に関する。詳しくは、ステッププレート及び/またはハンドルの傾斜を、傾斜駆動手段を用いて積極的に制御することにより、安定な走行が行われるようにする。なお、本発明は3個以上の車輪を有する走行装置にも適用できる。
【背景技術】
【0002】
従来の同軸二輪車では、複数のジャイロ等により車両の傾きを検出して、主にピッチ軸方向の車両の姿勢制御を行うようにしている(例えば、特許文献1参照。)。
【0003】
また、ばね等の復元力により中立位置に拘束されたハンドル若しくはステップを設け、それらの重力軸に対する絶対傾斜角度、若しくは車両のベースに対する相対傾斜角度を検出して、その大きさに応じた旋回動作が実現されるように各車輪を制御する装置もある(例えば、特許文献2参照。)。
【0004】
しかしながら、上述の特許文献には、いずれも本願発明の要旨とするステッププレート及び/またはハンドルの傾斜を積極的に制御して、安定な走行が行われるようにする技術については記載されていないものである。
【特許文献1】米国特許第5971091号公報
【特許文献2】特願2005−117365号
【発明の開示】
【発明が解決しようとする課題】
【0005】
例えば、人を搭乗させて二輪で走行する乗り物として、従来から上記の特許文献1,2等に開示されているような同軸二輪車が知られている。この内、特許文献2では、例えばばねの復元力により中立位置に拘束されたハンドルもしくはステップを用いて、それらの、重力軸に対する絶対傾斜角度、もしくは車両のベースに対する相対傾斜角度を検出し、この大きさに応じた旋回動作が実現されるように各車輪を制御している。
【0006】
ところが、このような車両により、例えば横勾配を有するカント路面を傾斜方向と直交の方向に直進走行しようとした場合には、以下に述べるような問題が生じる。
【0007】
まず、絶対傾斜角度を旋回制御に用いる場合、ばね等の復元力によるハンドルの中立位置は、図21のAに示すような位置となる。そこで、車両が直進するようにハンドルの絶対角度をゼロとするためには、搭乗者がばね力に反してハンドルを能動的に傾け、図21のBに示すような状態を実現する必要がある。従ってこのような操作には、ばね力に反してハンドルを傾け続けるための体力や熟練を要する。また、搭乗者によるハンドルのコントロールが適切に行われないと、車両が意図しない挙動を行ってしてしまう問題もあった。
【0008】
一方、相対傾斜角度を旋回制御に用いる場合、搭乗者がハンドルに力を加えない図21のAに示すような状態で車両は直進するが、車両が重力軸に対して傾斜した姿勢となるため、路面の横勾配が大きい場合には搭乗者が左右のバランスをとるのが容易はでない。さらに、坂道でその場旋回動作を行おうとした場合には、車両のベース部分のロール軸方向の傾きの変化に従ってハンドルの中立角度が地面に対して変化するため、搭乗者が自身の体とハンドルとの相対位置を変化させながら車両を操作する必要が生じる。
【0009】
また、同様の車両において、乗降時に片足をステップに乗せた場合には、図21のCに示すようにステップに対する左右の荷重のアンバランスによりステップおよびハンドルが傾斜することになり、この傾斜によって旋回制御が行われてしまうことになる。このため、上述の車両には、搭乗者が乗り降りを容易に行えないという問題もあった。
【0010】
この出願はこのような点に鑑みて成されたものであって、解決しようとする問題点は、従来の装置では、例えば横勾配を有するカント路面を傾斜方向と直交の方向に直進走行しようとした場合に、熟練を要するなど操作を容易に行うことができない。また、搭乗者の乗り降りも容易に行うことができなかったというものである。
【課題を解決するための手段】
【0011】
このため本発明においては、ステップ若しくはハンドルのロール軸方向の傾斜を制御可能なようにサーボモータを実装し、本体に実装された姿勢センサおよび位置センサから重力軸に対するステップ若しくはハンドルのロール軸の傾きを算出して、ステップ若しくはハンドルの傾きが常に重力軸上に平行になるよう制御する。
【発明の効果】
【0012】
これによって、搭乗者は、路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができ、自然な旋回、直進を実施することができるようになる。
【発明を実施するための最良の形態】
【0013】
すなわち、請求項1に記載の本発明は、平行に配置された複数の車輪と、複数の車輪の間に設けられて運転者が搭乗するステッププレートと、ステッププレートに垂直に設けられたハンドルとを有する走行装置であって、ステッププレート及び/またはハンドルをロール軸方向に傾斜可能とし、ステッププレート及び/またはハンドルをロール軸方向に傾斜駆動する傾斜駆動手段及びその制御手段を設け、ステッププレート及び/またはハンドルを水平または鉛直に保つように傾斜駆動手段を制御することを特徴とする走行装置である。
【0014】
また、請求項2に記載の走行装置においては、路面の傾きを検出する検出手段を設け、検出手段で検出した傾きの値を制御手段に供給し、ステッププレート及び/またはハンドルを水平または鉛直に保つように傾斜駆動手段を制御するものである。
【0015】
また、請求項3に記載の走行装置においては、ステッププレート及び/またはハンドルの傾斜駆動手段によって保たれる水平または鉛直の中立位置からの移動操作を測定する測定手段が設けられ、測定手段の測定値に応じて複数の車輪による走行の方向転換を行うものである。
【0016】
さらに請求項4に記載の走行装置においては、ステッププレート及び/またはハンドルの移動操作に対する抵抗力を、傾斜駆動手段を制御する制御手段の制御パラメータによって調整可能とすると共に、ステッププレートに掛かる荷重を検知する荷重検知手段を設け、荷重検知手段で検知した荷重の値に応じて制御パラメータを調整するものである。
【0017】
さらに請求項5に記載の走行装置においては、荷重検知手段での荷重の検知により運転者の乗降を判断した際には抵抗力が最大値となるように制御手段の制御パラメータを調整するものである。
【0018】
また、請求項6に記載の走行装置においては、制御手段を模擬する数学モデルを用いてステッププレート及び/またはハンドルに掛かるトルクを推定する推定手段を設け、推定手段で推定したトルクの値に応じてステッププレート及び/またはハンドルが変位するように傾斜駆動手段を制御するものである。
【0019】
以下、図面を参照して本発明を説明する。図1のA,Bには、本発明による走行装置を適用した同軸二輪車の一実施形態の構成を正面図及び側面図で示す。なお、この図1において、全体の主な構成は特許文献2に示された装置とほぼ等しいものである。
【0020】
図1のA,Bにおいて、平行に配置された2個の車輪1L,1Rが設けられ、これらの車輪1L,1Rにはそれぞれ独立に駆動手段(モータ)2L,2Rが設けられる。また、これらの駆動手段2L,2Rの間が上下に分割された車両本体3U,3Dによって連結される。さらにこれらの車両本体3U,3Dには、図示していないがジャイロ等のセンサで検出された車両の傾きや、車両への荷重等の情報に応じて駆動手段2L,2Rの駆動を制御するための制御手段などの回路装置が設けられている。
【0021】
また、車両本体3U,3Dの上側には、運転者が搭乗するステッププレートが設けられる。このステッププレートは左右に分割されたステップ4L,4Rで表され、これらのステップ4L,4Rは常に平行になるようにリンク機構(図示せず)で連結されている。さらに、ステップ4L,4Rの間にハンドル5が設けられる。このハンドル5は車両本体3U,3Dに対してロール軸方向に傾斜可能にされると共に、ハンドル5とステップ4L,4Rとの間は、互いに垂直となるようにリンク機構(図示せず)で連結されている。
【0022】
さらに、ハンドル5と車両本体3U,3Dの接続部の内、例えば車両本体3Uとの接続部にハンドル5をロール軸方向に傾斜駆動する傾斜駆動手段としての駆動用モータ6が設けられる。また、ハンドル5と車両本体3Dとの接続部7は回動自在とされる。これにより、ハンドル5は車両本体3U,3Dの左右にずらせることで傾斜可能とされる。そして、上述の車両本体3U,3Dに設けられる制御手段(図示せず)によって、ハンドル5が常に鉛直となるように駆動用モータ6の制御が行われている。
【0023】
次に、一輪モデルの制御装置の具体構成を図2の模式図を用いて説明する。なお実際の二輪車両では、ステップ4のセンサは共通となる。また、図示のモデルで車輪1に連結したモータ2の制御は、図1に示した車輪1L,1Rでは、それぞれ独立した制御装置により行われているものである。
【0024】
この図2において、ステップ4に内蔵された圧力センサ(図示せず)からの圧力検出信号PS1,2,3,4と、ステップ4に連結されたジャイロセンサや加速度センサからなる姿勢センサ8からのテーブル角度検出信号θ0とが、制御装置9内の中央制御装置91に供給される。そしてこれらの検出信号PS1〜4及びθ0と、搭乗者等が発する外部からのテーブル姿勢指令信号θREF〔d(θREF)/dt〕とが演算され、算出された回転指令ωrefがモータ制御装置92に供給される。
【0025】
さらに車輪1とモータ2とは減速機93を介して接続され、モータ2には回転角検出器94が設けられる。そして、回転角検出器94からのロータ回転角度位置信号Θrが制御装置9内のモータ制御部92に供給される。これにより、上述の回転指令ωrefに応じて形成されるモータ2への駆動電流がフィードバック制御され、車輪1の駆動が安定化される。このようにして、車輪1が安定に駆動されると共に、その駆動が圧力センサ(図示せず)からの圧力検出信号PS1〜4等によって制御される。
【0026】
また、図3には、システムの相互の接続関係を示す。図3において、上述の圧力検出信号PS1〜4と、例えばハンドル5の接続部7に設けられるロール軸角度器(ポテンショメータ)12からのロール軸角度検出信号PMとが姿勢センサ回路13に供給される。この姿勢センサ回路13にはジャイロセンサ21と加速度センサ22が内蔵されている。これにより、姿勢センサ回路13からは、上述の信号PS1〜4と信号PM、及びピッチ角ωp、ヨー角ωyawと、X,Y,Z軸の各角度信号Ax,Ay,Azが取り出される。
【0027】
これらの信号PS1〜4、PM、ωp、ωyaw、Ax,Ay,Azが、制御装置9内の中央制御装置91に供給される。また、例えばハンドル5の把持部に設けられるパワースイッチ14からの操作信号が中央制御装置91に供給される。これにより、中央制御装置91では左右の車輪1L,1R(図示せず)の回転指令ωref1,ωref2が算出され、モータ制御部92L,92Rに供給される。また、回転角検出器94L,94Rからの信号がモータ制御部92L,92Rに供給されて、モータ2L,2Rの駆動が行われる。
【0028】
さらに、バッテリ15からの電力は電源回路95に供給される。この電源回路95からの例えば24Vモータ用電源がモータ制御部92L,92Rに供給され、例えば5V制御用電源が姿勢センサ回路13と中央制御装置91に供給される。なお、電源回路95には電源スイッチ16が設けられて、各部への電源の供給が制御される。このようにして、モータ2L,2Rの駆動が行われ、これらのモータ2L,2Rにより車輪1L,1Rが駆動されて、同軸二輪車の走行が行われる。
【0029】
そしてこのような装置において、中央制御装置91では、ハンドル5を鉛直に保持するための回転角指令θref0が算出され、駆動用モータ6の駆動を制御するモータ制御部92Hに供給される。また、駆動用モータ6に関連して設けられた回転角検出器94Hからの信号がモータ制御部92Hに供給される。これによって、中央制御装置91では、重力に対する4L,4R等の傾きが把握されているので、それを相殺するようにステップ駆動用モータ6の駆動が制御されることで、ハンドル5は常に鉛直に保持される。
【0030】
すなわち図3の制御装置において、回転検出器94L,94R,94Hを有するモータモータ2L,2R,6に接続されるモータ制御装置92L,92R,92Hには、モータ回転検出器94L,94R,94Hからのモータ回転角度と、中央制御装置91に供給される信号PS1〜4、PM、ωp、ωyaw、Ax,Ay,Azに応じた制御指令データが供給される。これによって当該モータの回転速度を算出し、その算出された回転速度に相当するトルクとなるモータ電流を形成し、タイヤ回転トルクを発生する。
【0031】
また、上記制御装置は、車両に実装されたジャイロセンサと加速度センサ信号から車両姿勢を検出するものであり、倒立振子による姿勢を制御する原理、もしくは二足歩行ロボット制御のZMP(ゼロモーメントポイント)制御の原理、あるいは、本願発明者が先に特開2005−94858号公報に開示した方法により、車両が姿勢を保つようにモータへの回転指令を演算し、モータ制御装置へ回転指令データを送信する。こうしたフィードバック制御により車両は姿勢を保ち、人の重心姿勢変化により走行することができる。
【0032】
さらにこの装置による旋回方法としては、ハンドル5のロール軸角度変化を検出し、ロール角度変化に比例して左右の車輪1L,1Rの回転速度に差を与えて制御することにより、旋回を行うことができる。
【0033】
これにより、図1に示すような構造を有する車両においては、ハンドル5とステップ4L,4Rの傾きが連動しており、ハンドル5の傾斜角度が旋回制御に用いられることから、図4のAに示すように平地における走行はもちろんのこと、図4のBに示すような横傾斜面での走行や、図4のCに示すような段差部での走行においても、通常走行ではハンドル5を鉛直に保って、その状態からのハンドル5の操作によって旋回走行等の制御を容易に行うことができる。
【0034】
さらに、図5のAには、上述したハンドル制御装置の概観を示す。この図5のAにおいて、回転角度検出器94Hを伴うモータ6は車両本体3に連結されている。モータ6の出力軸はハンドル5に連結されており、ハンドル5のロール傾斜角度を変化させられるような構造となっている。車両本体3に対するハンドル5の相対角度θbは、モータ5の回転角度検出器94Hにより測定される。このように、本発明におけるモータ6を用いてハンドル5を地面に対して垂直に保つ制御を、「アクティブハンドル制御」と呼ぶ。
【0035】
このアクティブハンドル制御装置の制御システム構成を、図5のBに示す。図において中央制御装置91は、姿勢センサ13から得られる車両本体3のロール軸傾斜角度θrolと、モータ6の回転角度検出器94Hで測定される車両本体3に対するハンドル5の相対角度θbにより、地平面の垂直軸に対するハンドル5のロール軸方向の絶対角度θhを算出する。そしてこの絶対角度θhがゼロ、つまりハンドル5が水平面に対して垂直になるように、モータ6を制御するためのトルク指令をモータ制御装置92Hに与える。
【0036】
この結果、ハンドル5は車体のロール軸方向の傾きθrolによらず、常に水平面に垂直な状態が中立位置となる。
これにより、例えば走行時に路面の横勾配が、図4のA→B、またはA→Cのように、ゼロからある角度に変化した場合には、搭乗者がハンドルに力を加えなくても、ハンドルおよびステップはモータトルクにより水平面に対して垂直な姿勢に変化する。従って、搭乗者も体を左右に傾斜させることなく、安定した直立姿勢を保ったまま直進走行を行うことができる。
【0037】
また、旋回操作を行おうとした場合には、図5のBにおける位置制御ゲイン[Kp]と角度偏差[-θh]に応じたモータトルクによる仮想ばね力がハンドルに与えられる。このため、搭乗者は、仮想ばね力に対抗して任意の方向にハンドルを操作することにより、所望の旋回動作を実現することができる。すなわち、仮想ばね力に対抗してハンドルを操作するということは、搭乗者が意思を持ってその操作を行っていることであり、これにより、搭乗者の意図しない挙動が行われる恐れを減少させることができる。
【0038】
すなわち本発明の走行装置によれば、図5のシステムを用いることによって、ハンドルの中立位置は路面の傾斜角度に依存して変化することがなくなり、横勾配のある路面においても、容易、且つ安定した直進走行を可能することが出来る。これに加え、旋回レバーもしくはハンドルの操作により、傾斜路面においてその場旋回等の旋回動作を行う場合にも、搭乗者は体を垂直に保ったまま旋回動作を実現できるため、車両走行時の安定性を極めて向上させることができる。
【0039】
また、上述の図5のBにおける位置制御ゲイン[Kp]は、仮想ばね力のばね定数に相当するものである。そこでこのゲインの大きさを変化させることによって、ハンドルの曲げにくさを制御することが可能になる。これにより、例えば図6に示すような車両の乗り降り時の車体の傾斜を、ステップ部に設置した荷重センサ等を利用して防止し、乗降を円滑に行えるようにすることが可能である。図7には、そのような処理を実現するための、乗降時の車体傾斜防止制御のフローチャートを示す。
【0040】
図7において、アクティブハンドル制御が開始されると、ステップS1でハンドル絶対角度(θh=θrol+θb)が算出される。そして、ステップS2で左右の荷重センサは共にONであるか否か判断される。ここで共にONであるとき(Yes)は、ステップS3で位置制御ゲイン[Kp]が小さい値、例えばKp=5にされる。これに対して、ステップS2で荷重センサが共にOFF、もしくは一方のみONのとき(No)は、ステップS4で位置制御ゲイン[Kp]が大きい値、例えばKp=500にされる。
【0041】
さらに、ステップS5でハンドル駆動用モータへの指令(τref=Kp×(θd−θh))が実行される。これにより、位置制御ゲイン[Kp]は、Kp=5またはKp=500にされる。また、ステップS6ではサーボがOFFとされたか否か判断される。ここでサーボがOFFとされたとき(Yes)は、アクティブハンドル制御が終了される。一方、ステップS6でサーボがOFFとされていないとき(No)は、ステップS1に戻されて動作が繰り返される。このようにして、乗降時の車体傾斜防止制御の処理が実現される。
【0042】
従って、本発明の走行装置によれば、荷重センサの出力より、センサ出力が共にONではない場合には、搭乗者が乗降動作を行っていると判断し、位置制御ゲイン[Kp]の値を大きく設定する。これにより、同じ大きさの外力をステップもしくはハンドルに加えても、ゲインが小さい場合と比較して、ハンドル及びステップは車体に対して回転し難くなる。よって、図6のような乗降時の左右の荷重のアンバランスによるステップ及びハンドルの傾斜を軽減することができ、搭乗者は安定して車両の乗降を行うことができる。
【0043】
また、図1に示した走行装置では、電源のOFF時にもハンドル5が垂直となるようにばね10L,10Rを用いてハンドル5を支持している。このような構成は、従来の装置でも用いられているものであるが、その場合に、ばね10L,10Rのばね定数は不変である。このため、搭乗者の体重や筋力によらず、ハンドルをロール軸方向に傾斜させるために必要な力は等しくなり、特に非力な搭乗者では所望の操作を行うのに多くの体力が消耗される恐れがある。
【0044】
これに対して、本発明の走行装置によれば、搭乗者の特性に従ってハンドルのロール軸方向の剛性を変化させることにより、各人に適した操縦しやすさを提供することが可能である。すなわち、例えば荷重センサにより搭乗者の体重を検出し、この大きさに従って位置制御ゲイン[Kp]の大きさを変化させる。これにより、例えば体重が軽く、力が弱いと考えられる搭乗者に対しては、位置制御ゲイン[Kp]の値を小さくして、ハンドルを小さな力で傾けられるようにすることが可能である。
【0045】
ところで、図1に示すような車両でばね10L,10Rがない場合には、平坦路面での旋回時におけるハンドル操作に対しても、常にモータトルクにより復元力を発生させる必要が生じる。一方、図1のような車両でばね10L,10Rを併用している場合には、ばね力に抗してモータの制御を行う必要がある。このため、いずれの場合においてもバッテリの消費量が大きくなる問題が生じていた。これに対して、図8には、モータと機械的なばねを併用してハンドルを任意の中立位置に拘束するようにした実施形態の構成を示す。
【0046】
すなわち図8のAは正面図を示し、ハンドル5の下端に設けられるハンドルピン31の左右にばね32L,32Rが設けられる。さらに、図8のBは下面図を示し、上述のばね32L,32Rはユニット33に設けられ、このユニット33はガイドレール34によって左右に移動可能に配置されている。そして、このユニット33に対してボールねじ35を介してモータ6が設けられる。従って、モータ6が正逆に回転されることにより、ボールねじ35を介してユニット33が左右に移動されるものである。
【0047】
この構成において、ステップ4L,4Rはハンドル5にリンクされている。そして、旋回時のハンドル5の操作に対する復元力は、ハンドルピン31の左右に設置されたばね32L,32Rが発生する。このとき、ガイドレール34により移動方向を拘束されたばねユニット33には左右方向の力が加わるが、バックドライブ不能なボールねじ35によりばねユニット33の左右位置は固定されているため、ハンドル駆動用モータ6にトルクを与える必要はない。
【0048】
逆に、ハンドル制御用モータ6にトルクを与えて駆動することにより、ばねユニット33を左右に変位させ、ハンドルピン31の中立位置(左右のばね力の和がゼロとなるハンドル位置)を制御することができる。よって、例えば図4のように路面の横勾配が変化した場合、ハンドルの中立位置が水平面に対して垂直となるようにハンドル制御用モータ6を駆動することにより、搭乗者がハンドルおよびステップに意図的に操作力を与えなかった場合にはステップは水平に保たれ、搭乗者は安定した走行を行うことができる。
【0049】
このように、図8の実施形態では、横勾配路面等においてハンドルの中立位置を変化させる場合にのみモータ6を駆動する車体構造としているので、図1に示したような実施形態の場合と比較してモータ6で消費される電力が削減され、バッテリの消費量が軽減される。また、ボールねじ35によりハンドル駆動用モータ6が減速されるため、小型のモータを使用しても大きな並進力を得ることができるようになる。
【0050】
また、図7のステップS5で実行されるハンドル駆動用モータの制御則、
τref=Kp×(θref−θh) (1.1)
に微積分項を加え、
τref=Kp×(θref−θh)+Kd×d/dt(θref−θh)+Ki×∫(θref−θh)dt
(1.2)
とすることにより、ハンドルの挙動を改善することができる。
【0051】
すなわち、例えば旋回のためにハンドルを傾斜させた後に搭乗者がハンドルを離した場合には、従来の車両ではばね力によりハンドルが急激に戻されて中立位置付近で振動し、車両が左右に旋回して挙動が不安定となる恐れがある。しかし本発明の装置を搭載した車両で、(1.2)式右辺の第2項(微分項)を加えたアクティブハンドル制御を行った場合には、ハンドルは上記の微分項の作用により緩やかに中立位置(垂直)に復帰するため、車両の挙動が安定することになる。
【0052】
また、(1.1)式による制御を行っている場合には、ハンドルの自重により一旦傾いたハンドルは元の垂直位置に復帰できないが、(1.2)式第3項の積分項を加えることにより、自重の影響をキャンセルしてハンドルを垂直に復帰させることが可能となる。このように、本発明の走行装置によれば、アクティブハンドル制御を実施することによって、安定、かつ良好な走行装置を実現することができるものである。
【0053】
さらに従来の同軸二輪車においては、搭乗者を乗せた状態で車両の自律走行を行った場合に、旋回時の遠心力により搭乗者が外側への力を受けるため、大きな旋回速度を発生させることができない。これに対して本発明の走行装置では、アクティブハンドル制御により、自律走行時の旋回動作に合わせて車両のハンドルもしくはステップを傾斜させることができ、これにより搭乗者の重心を内側に移動させて、車両の安定性を向上させることが可能となる。
【0054】
また、図10以下には、本発明による走行装置の他の実施形態を示す。まず図10は、上述した図1〜図9の実施形態では主にハンドル5をアクティブ制御して、ステップ4L,4Rはリンク機構を介した制御としていたものを、主にステップ4L,4Rをアクティブ制御する「アクティブステップ制御」とする場合の実施形態を示している。
【0055】
そこで、図10の実施形態においては、車両本体3Uの下部に設けられたステップ駆動用モータ61を用いて、このモータ61によりベルト62を介して左右のステップ4L,4Rが連結された縦の部材63L,63Rを車両本体3Uに対して回転させる。これにより、ステップ4L,4Rが車両本体3Uに対して回転され、ステップ4L,4Rのアクティブ駆動が実現される。なおハンドル5は、ステップ4L,4Rの駆動に伴いリンク機構を介して制御される。
【0056】
さらに、図11〜図14には、ハンドル5及びステップ4をそれぞれ単独で動かす場合の実施形態を示す。これらによっても、ハンドル5及びステップ4はそれぞれアクティブ制御され、搭乗者は路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができるなど、所期の目的は達成されるものである。
【0057】
すなわち、図11はハンドル5を制御するものであって、この実施形態ではステップ4に設けられたモータ6によりハンドル5が駆動されている。これにより図12のA,Bに示すように、モータ6を駆動することでハンドル5をステップ4に対して任意の角度に制御することができる。従って搭乗者は、路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができ、自然な旋回、直進を実施することができるようになる。
【0058】
また、図13はステップ4を制御するものであって、この実施形態ではハンドル5に設けられたモータ6によりステップ4が駆動されている。これにより図14のA,Bに示すように、モータ6を駆動することでステップ4をハンドル5に対して任意の角度に制御することができる。従って搭乗者は、路面の傾きがある場合にもハンドルに操作力を与えずに自分自身の姿勢を水平面に対して垂直に保つことができ、自然な旋回、直進を実施することができるようになる。
【0059】
ところで、上述のハンドルが駆動されているときのハンドル慣性モーメントIsは、例えば図15のAに示すように表される。また、このハンドル慣性モーメントIsに関わる制御回路の各部の信号は図15のBに示される。さらにこのようなハンドルシステムの制御モデルは、例えば図16に示すように表すことができる。
【0060】
しかしながら、このような制御装置では、外力トルクとしてハンドルトルクThが加わると、モータ制御装置によりモータは回転角度指令と一致するようフィードバックトルクが生じてハンドルを指令角度に維持するトルクを生じさせるため、ハンドルトルクを与えてもハンドル角度変位は小さくなる。また、図15のようにハンドルとモータの間に減速機を持つ場合には、摩擦等の影響で ハンドルトルクに対する角度変位が小さくなる。
【0061】
そこでため、以下に述べる数学モデルを使った制御が必要となるものであり、本発明を用いることによって、外力により容易にハンドル角度を変位させることができる制御装置を提供することができる。以下には、そのような実施形態について説明する。
【0062】
図17において、図の上部は図16に示したハンドルシステムの制御モデルと同じである。すなわち、図17の入力端子1000には回転指令ωrefが供給され、この回転指令ωrefはモータ制御装置100の減算器101を通じて速度制御器102に供給される。速度制御器102は、PI(Proportional(比例)/Integral(積分))制御を行うもので、図中に記載のように〔Kp〕の特性を有する。
【0063】
この速度制御器102の出力信号はハンドルトルク補正器103に供給される。ハンドルトルク補正器103は供給された信号に後述するコンプライアンスゲイン[Kcomp]を加算する。これによりハンドルトルク補正器103からはモータトルク指令Tref[Nm]が取り出され、このモータトルク指令Tref[Nm]が利得[Kamp]のアンプ104でモータ電流Im[A]に変換される。
【0064】
さらにアンプ104で変換されたモータ電流Im[A]は、実モデル200のモータに供給される。このモータはモータ定数[Km]201で表され、モータ定数201からはモータトルク出力Tm[Nm]が取り出される。モータトルク出力Tm[Nm]は減算器202に供給され、外力トルクTd[Nm]が減算されてロータトルクTr[Nm]が取り出される。
【0065】
ロータトルクTr[Nm]は、〔1/(JmS+Dm)〕の特性を有するモータロータ203に供給され、ロータ回転角速度ωm[rad/esc]が取り出される。そしてロータ回転角速度ωm[rad/esc]は、〔1/S〕の特性を有する演算器204に供給され、ロータ回転角Θm[rad]が算出される。この算出されたロータ回転角Θm[rad]が、出力端子2000に取り出されると共に、減算器101にフィードバックされる。
【0066】
また、演算器204からのロータ回転角Θm[rad]は、減速比N:1の減速機を構成する〔1/N〕の変換器205に供給され、減速された信号が減算器206を通じてバネ定数[Ks]207に供給されてハンドルトルクTw[Nm]に変換される。そしてバネ定数[Ks]207からのハンドルトルクTw[Nm]が、減速機を構成する〔N〕の変換器208を通じて外力トルクTd[Nm]として減算器202に供給される。
【0067】
さらに、バネ定数[Ks]207からのタイヤトルクTw[Nm]は、加算器209でハンドルトルクTh[Nm]を加算され、〔1/(JtS+Dt)〕の特性を有するハンドル210に供給される。このハンドル210の回転角速度が〔1/S〕の演算器211に供給され、ハンドル回転角度θt[rad]が取り出されて減算器206に供給される。
【0068】
これにより、実モデル200では、モータ電流Im[A]に応じてモータ定数201が駆動されると共に、モータトルク出力Tm[Nm]から外力トルクTd[Nm]が減算され、減算されたロータトルクTr[Nm]に基づいてロータ回転角Θm[rad]が取り出される。そしてこの場合に、モータトルク出力Tm[Nm]から減算される外力トルクTd[Nm]は、路面摩擦トルクFdr×r[Nm]の影響を受けており、出力端子2000には、ハンドルトルクTh[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータ回転角Θm[rad]が取り出されている。
【0069】
このような実モデル200に対して、モータ制御装置100の中に、上述の実モデル200を模擬する数学モデル300が設けられる。この数学モデル300は、実モデル200の機能を解析し、その機能をコンピュータシミュレーションにより実現するプログラムである。従って、このようなプログラムの実施形態はプログラムリスト等の形態を採るが、以下の説明は、理解をし易くする目的で、図17に示す機能ブロックを用いて行う。
【0070】
この数学モデル300において、上述のアンプ104で変換されたモータ電流Im[A]は、数学モデル300のモータモデル定数[Kmm]301に供給され、モータモデル定数301からモータトルク出力Tmm[Nm]が取り出される。モータトルク出力Tmm[Nm]は減算器302に供給され、外力推定トルクTmd[Nm]が減算されてロータモデルトルクTmr[Nm]が取り出される。
【0071】
ロータモデルトルクTmr[Nm]は、〔1/(JmmS+Dmm)〕の特性を有するモータロータモデル303に供給され、ロータモデル回転角速度ωmm[rad/esc]が取り出される。そしてロータ回転モデル角速度ωmm[rad/esc]は、〔1/S〕の特性を有する演算器304に供給され、ロータモデル回転角Θmm[rad]が算出される。この算出されたロータモデル回転角Θmm[rad]が出力端子3に取り出される。
【0072】
また、演算器304からのロータモデル回転角Θmm[rad]は、減速比N:1の減速機モデルを構成する〔1/Nm〕(ただし、Nm=N)の変換器305に供給され、減速された信号が減算器306を通じてバネモデル定数[Kms]307に供給されてハンドルモデルトルクTmw[Nm]に変換される。そしてバネモデル定数[Kms]307からのハンドルモデルトルクTmw[Nm]が、減速機モデルを構成する〔N〕の変換器308を通じて外力推定トルクTmd[Nm]として減算器302に供給される。
【0073】
さらに、バネモデル定数307からのハンドルモデルトルクTmw[Nm]は、加算器309でハンドルトルク推定値Tidr[Nm]を加算され、〔1/(JmtS+Dmt)〕の特性を有するハンドルモデル310に供給される。このハンドルモデル310の回転角速度が〔1/S〕の演算器311に供給され、ハンドルモデル回転角度θmt[rad]が取り出されて減算器306に供給される。
【0074】
これにより、数学モデル300では、モータ電流Im[A]に応じてモータモデル定数301が駆動されると共に、モータモデルトルク出力Tmm[Nm]から外力推定トルクTmd[Nm]が減算され、減算されたロータモデルトルクTmr[Nm]に基づいてロータモデル回転角Θmm[rad]が取り出される。
【0075】
そしてこの場合に、モータモデルトルク出力Tmm[Nm]から減算される外力推定トルクTmd[Nm]は、ハンドルトルク推定値Tidr[Nm]の影響を受けており、出力端子3000には、ハンドルトルク推定値Tidr[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータモデル回転角Θmm[rad]が取り出される。
【0076】
すなわち、この数学モデル300の出力端子3000には、ハンドルトルク推定値Tidr[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータモデル回転角Θmm[rad]が取り出されている。一方、実モデル200の出力端子2000には、ハンドルトルクTh[Nm]の影響を受けた状態でのモータ電流Im[A]に対するロータ回転角Θm[rad]が取り出されている。
【0077】
そこで、これらのロータモデル回転角Θmm[rad]とロータ回転角Θm[rad]とが等しくなるようにハンドルトルク推定値Tidr[Nm]を制御する。これによって、制御されたハンドルトルク推定値Tidr[Nm]をハンドルトルクFdr×r[Nm]と等しくすることができる。
【0078】
何故なら、上述の実モデル200と数学モデル300においては、ハンドルトルクTh[Nm]とハンドルトルク推定値Tidr[Nm]以外の要件は全く同じであると考えられ、ロータ回転角Θm[rad]とロータモデル回転角Θmm[rad]との差分はハンドルトルクFdr×r[Nm]とハンドルトルク推定値Tidr[Nm]との差によってのみ生じると考えられるからである。
【0079】
ただし、上述の実モデル200と数学モデル300の関係において、各要素の値は、Kmm=Km[Nm/A]、Jmm=Jm[kg/sec2]、Dmm=Dm[Nm/(rad/sec)]、Nm=N、Kms=Ks[Nm/rad]、Jmt=Jt[kg/sec2]、Dmt=Dt[Nm/(rad/sec)]とする。なおこのような制御は、モデル規範型適応制御〔Model Reference Adaptive Control〕と呼ばれているものである。
【0080】
そして上述の制御を実現するため、図17の構成では、ロータモデル回転角Θmm[rad]とロータ回転角Θm[rad]とを減算器106に供給して差分のモデルエラーEmを取り出す。そしてこのモデルエラーEmをゲイン〔Kadp+(Kadi/S)〕の推定器400に供給し、この推定器400で形成されるハンドルトルク推定値Tidr[Nm]の値を制御する。
【0081】
これにより、ハンドルトルクTh[Nm]と等しいハンドルトルク推定値Tidr[Nm]が取り出される。さらに図17の構成では、この取り出されたハンドルトルク推定値Tidr[Nm]を、ハンドルトルク補正器103に供給されるコンプライアンスゲインKcompの設定器107に供給し、コンプライアンスゲインKcompの設定を行う。そこで図18には、コンプライアンスゲインKcompの設定までに至るモータ制御装置100で実行される処理の実施形態をフローチャートで示す。
【0082】
図18において、ハンドルトルク制御が開始されると、最初のステップS11では制御パラメータの設定を行い、ハンドル慣性モーメントにより制御ゲインKp,Kiを設定する。次にステップS12では、モータ制御装置の位置制御器とハンドルトルク補正器からモータトルク指令Twを算出する。さらにステップS13で、モータ制御装置100の速度制御器102とスリップ防止調整器103によりモータトルク指令Trefを算出モータトルク指令Trefにより実モータを駆動する。
【0083】
また、ステップS14では、実モータのエンコーダ信号(ロータ回転角Θm[rad])と数学モデル信号(ロータモデル回転角Θmm[rad])とを比較してモデルエラーEmを算出する。そしてステップS15で、推定器400での処理によりハンドルトルク推定値Tidr[Nm]を算出する。そしてステップS16では、コンプライアンスゲインKcmp演算結果を算出する。
【0084】
従って、上述の実施形態において、ハンドル駆動の数学モデルの任意の部位の回転値と、実際のハンドル駆動の対応する部位の模擬された回転値とが等しくなるように数学モデルに印加されるハンドルトルク推定値を制御し、ハンドル駆動のモータトルクが印加されるハンドルトルク推定値を超えないようにモータトルク指令信号の大きさを制限することにより、良好にハンドルの制御を行うことができる。
【0085】
これによって、従来の装置では、例えば外力トルクとしてハンドルトルクThが加わると、モータ制御装置によりモータは回転角度指令と一致するようフィードバックトルクが生じてハンドルを指令角度に維持するトルクを生じさせるため、ハンドルトルクを与えてもハンドル角度変位は小さいなどの問題も生じていたものを、本発明によればこれらの問題点を容易に解消する手段を提供することができる。
【0086】
さらに図19には、シミュレーションによる本発明の装置の信号の様子を示す。なお図19においては、シミュレーション上でハンドルトルクを変化したとき、推定器によりハンドルトルク推定する変化を示す。本発明の装置によりハンドルトルクを正しく推定する様子を示した。
【0087】
すなわち図19において、モータ制御装置100は、減算器151、アンプ152、153、積分器154、加算器155、微分器156で構成される。また、実モデル200は、減算器251、252、アンプ253、254、255、演算器256、257、積分器258、259、加算器260で構成される。
【0088】
さらに数学モデル300も、減算器351、352、アンプ353、354、355、演算器356、357、積分器358、359、加算器360で構成される。そして推定器400は、減算器451、アンプ452、453、積分器454、加算器455で構成される。この図19で、数学モデルの各係数は実モデルと同じ値とする。
【0089】
すなわち
Kmm=Km [Nm/A]
Jmm=Jm [kg/sec^2]
Dmm=Dm [Nm/(rad/sec)]
Nm=N
Kms=Ks [Nm/rad]
Jmt=Jt [kg/sec^2]
Dmt=Dt [Nm/(rad/sec)]
Kadp,Kadiは推定器比例、積分ゲイン
である。
【0090】
このシステムでモデル誤差Emがゼロになるよう推定器を設計する。この例ではPI制御器で推定ゲインをKadp,Kadiにより推定器を設計している。こうして算出されたハンドルトルク推定値ThiはハンドルトルクThと一致する値となる。
【0091】
そして、このような装置において、例えば図中の波形図Aに示すような正弦波の信号を減算器151に供給し、図中の波形図Bの上側に示すようなステップ波形の路面摩擦トルクFdr×r[Nm]を加算器260に供給すると、図中の波形図Cに示すようなモータトルク指令Tref[Nm]が形成され、図中の波形図Dに示すようなロータ回転角Θm[rad]が取り出される。これによって、路面摩擦力推定値Tidr[Nm]は図中の波形図Bの上側に示すように変化される。
【0092】
従って、このような制御が行われた場合には、例えば図20において、ハンドル回転角度θ0[rad]をθ1[rad]に変化させた場合に、従来は図20のAに示すようにハンドルトルクThdr0[Nm]を大きくしても、ハンドル回転角度にはあまり反映されなかったものを、本発明によれば、図20のBに示すようにハンドルトルクThdr0[Nm]に応じたハンドル回転角度θ2[rad]が得られ、ハンドル回転角度が所望の大きさに制御される。
【0093】
こうして本発明の走行装置によれば、平行に配置された複数の車輪と、複数の車輪の間に設けられて運転者が搭乗するステッププレートと、ステッププレートに垂直に設けられたハンドルとを有する走行装置であって、ステッププレート及び/またはハンドルをロール軸方向に傾斜可能とし、ステッププレート及び/またはハンドルをロール軸方向に傾斜駆動する傾斜駆動手段及びその制御手段を設け、ステッププレート及び/またはハンドルを水平または鉛直に保つように傾斜駆動手段を制御することにより、良好にハンドル及びステップの所定の角度とする制御を行うことができる。
【0094】
なお本発明は、上述の説明した実施形態に限定されるものではなく、本発明の精神を逸脱することなく種々の変形が可能とされるものである。
【図面の簡単な説明】
【0095】
【図1】本発明による走行装置を適用した同軸二輪車の一実施形態の構成を示す正面図及び側面図である。
【図2】一輪車モデルの制御構造図である。
【図3】その説明のためのシステム構成図である。
【図4】その動作の説明のための図である。
【図5】アクティブハンドル制御装置の説明のための図である。
【図6】その説明のための図である。
【図7】その説明のためのフローチャート図である。
【図8】同軸二輪走行車両の要部の構造図である。
【図9】その説明のための図である。
【図10】本発明による走行装置を適用した同軸二輪車の他の実施形態の構成を示す正面図及び側面図である。
【図11】本発明による走行装置を適用した同軸二輪車の他の実施形態の構成を示す正面図及び側面図である。
【図12】その説明のための図である。
【図13】本発明による走行装置を適用した同軸二輪車の他の実施形態の構成を示す正面図及び側面図である。
【図14】その説明のための図である。
【図15】減速機を用いたアクティブハンドル制御システムの構成図である。
【図16】その制御方法の説明のための図である。
【図17】ハンドルトルク推定器とハンドルコンプライアンス制御と行うシステムの構成図である。
【図18】その説明のためのフローチャート図である。
【図19】その説明のための図である。
【図20】その説明のための波形図である。
【図21】従来の技術の説明のための図である。
【符号の説明】
【0096】
1L,1R…車輪、2L,2R…駆動手段(モータ)、3U,3D…車両本体、4L,4R…ステップ、5…ハンドル、6…駆動用モータ、10L,10R…ばね、31…ハンドルピン、32L,32R…ばね、33…ユニット、34…ガイドレール、35…ボールねじ
【特許請求の範囲】
【請求項1】
平行に配置された複数の車輪と、前記複数の車輪の間に設けられて運転者が搭乗するステッププレートと、前記ステッププレートに垂直に設けられたハンドルとを有する走行装置であって、
前記ステッププレート及び/またはハンドルをロール軸方向に傾斜可能とし、
前記ステッププレート及び/またはハンドルをロール軸方向に傾斜駆動する傾斜駆動手段及びその制御手段を設け、
前記ステッププレート及び/またはハンドルを水平または鉛直に保つように前記傾斜駆動手段を制御する
ことを特徴とする走行装置。
【請求項2】
請求項1記載の走行装置において、
路面の傾きを検出する検出手段を設け、
前記検出手段で検出した傾きの値を前記制御手段に供給し、前記ステッププレート及び/またはハンドルを水平または鉛直に保つように前記傾斜駆動手段を制御する
ことを特徴とする走行装置。
【請求項3】
請求項1記載の走行装置において、
前記ステッププレート及び/またはハンドルの前記傾斜駆動手段によって保たれる前記水平または鉛直の中立位置からの移動操作を測定する測定手段が設けられ、
前記測定手段の測定値に応じて前記複数の車輪による走行の方向転換を行う
ことを特徴とする走行装置。
【請求項4】
請求項3記載の走行装置において、
前記ステッププレート及び/またはハンドルの移動操作に対する抵抗力を、前記傾斜駆動手段を制御する前記制御手段の制御パラメータによって調整可能とすると共に、
前記ステッププレートに掛かる荷重を検知する荷重検知手段を設け、
前記荷重検知手段で検知した荷重の値に応じて前記制御パラメータを調整する
ことを特徴とする走行装置。
【請求項5】
請求項4記載の走行装置において、
前記荷重検知手段での荷重の検知により前記運転者の乗降を判断した際には前記抵抗力が最大値となるように前記制御手段の制御パラメータを調整する
ことを特徴とする走行装置。
【請求項6】
請求項1記載の走行装置において、
前記制御手段を模擬する数学モデルを用いて前記ステッププレート及び/またはハンドルに掛かるトルクを推定する推定手段を設け、
前記推定手段で推定したトルクの値に応じて前記ステッププレート及び/またはハンドルが変位するように前記傾斜駆動手段を制御する
ことを特徴とする走行装置。
【請求項1】
平行に配置された複数の車輪と、前記複数の車輪の間に設けられて運転者が搭乗するステッププレートと、前記ステッププレートに垂直に設けられたハンドルとを有する走行装置であって、
前記ステッププレート及び/またはハンドルをロール軸方向に傾斜可能とし、
前記ステッププレート及び/またはハンドルをロール軸方向に傾斜駆動する傾斜駆動手段及びその制御手段を設け、
前記ステッププレート及び/またはハンドルを水平または鉛直に保つように前記傾斜駆動手段を制御する
ことを特徴とする走行装置。
【請求項2】
請求項1記載の走行装置において、
路面の傾きを検出する検出手段を設け、
前記検出手段で検出した傾きの値を前記制御手段に供給し、前記ステッププレート及び/またはハンドルを水平または鉛直に保つように前記傾斜駆動手段を制御する
ことを特徴とする走行装置。
【請求項3】
請求項1記載の走行装置において、
前記ステッププレート及び/またはハンドルの前記傾斜駆動手段によって保たれる前記水平または鉛直の中立位置からの移動操作を測定する測定手段が設けられ、
前記測定手段の測定値に応じて前記複数の車輪による走行の方向転換を行う
ことを特徴とする走行装置。
【請求項4】
請求項3記載の走行装置において、
前記ステッププレート及び/またはハンドルの移動操作に対する抵抗力を、前記傾斜駆動手段を制御する前記制御手段の制御パラメータによって調整可能とすると共に、
前記ステッププレートに掛かる荷重を検知する荷重検知手段を設け、
前記荷重検知手段で検知した荷重の値に応じて前記制御パラメータを調整する
ことを特徴とする走行装置。
【請求項5】
請求項4記載の走行装置において、
前記荷重検知手段での荷重の検知により前記運転者の乗降を判断した際には前記抵抗力が最大値となるように前記制御手段の制御パラメータを調整する
ことを特徴とする走行装置。
【請求項6】
請求項1記載の走行装置において、
前記制御手段を模擬する数学モデルを用いて前記ステッププレート及び/またはハンドルに掛かるトルクを推定する推定手段を設け、
前記推定手段で推定したトルクの値に応じて前記ステッププレート及び/またはハンドルが変位するように前記傾斜駆動手段を制御する
ことを特徴とする走行装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】

【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2008−120347(P2008−120347A)
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願番号】特願2006−309410(P2006−309410)
【出願日】平成18年11月15日(2006.11.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願日】平成18年11月15日(2006.11.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]