
走行計画作成装置
【課題】乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成できるようにする。
【解決手段】走行計画の計画区間を特定し、当該計画区間を耐久記憶媒体に記憶させておき、耐久記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させ(S406、S408、S412)、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画を作成する(S500)。
【解決手段】走行計画の計画区間を特定し、当該計画区間を耐久記憶媒体に記憶させておき、耐久記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させ(S406、S408、S412)、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画を作成する(S500)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関とモータを走行用の動力源として走行するハイブリッド車両の走行計画を作成する走行計画作成装置に関するものである。
【背景技術】
【0002】
従来、エンジンとモータを走行用の動力源として走行するハイブリッド車両において、エンジンの消費する燃料を低減するために、出発地から目的地までの道路状況に応じて燃料消費量が最小となるように、エンジンおよびモータの運転スケジュールを設定し、この運転スケジュールに従ってエンジンおよびモータの駆動制御を行う装置がある(例えば、特許文献1、2参照)。
【特許文献1】特開2000−333305号公報
【特許文献2】特開2001−183150号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記特許文献1、2に記載の装置では、計画区間を設定する際に、出発地から目的地に至る案内経路を探索し、この案内経路を計画区間として設定したり、通勤路のような走行頻度の高い経路を走行時刻とともにナビゲーション装置に記録しておき、この記録経路を記録時刻とほぼ同時に走行する場合にはこの記録経路と同じ経路を走行するものと推定し、この記録経路を計画区間として設定したりするようになっている。
【0004】
しかしながら、このような計画区間の設定方法では、必ずしも乗員の意図する走行予定経路が計画区間として設定されるとは限らない。また、一度設定された計画区間を修正したくても、乗員は計画区間を修正することができない。このため、乗員の意図する走行予定経路と異なる区間を計画区間として作成された走行計画に従ってエンジンとモータの駆動制御が行われ、本来の低燃費走行を実現できない場合があった。
【0005】
本発明は上記点に鑑みたもので、乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明は、内燃機関とモータを走行用の動力源として走行するハイブリッド車両に搭載され、計画された走行計画に従って内燃機関とモータの駆動制御を行うハイブリッド車両の走行計画作成装置であって、走行計画の計画区間を特定し、当該計画区間を記憶媒体に記憶させる計画区間記憶手段と、記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させる走行予定経路特定手段と、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画を作成する走行計画作成手段と、を備えたことを特徴としている。
【0007】
このような構成によれば、走行計画の計画区間を特定し、当該計画区間を記憶媒体に記憶させ、記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させ、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画が作成される。すなわち、乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成することができる。
【0008】
なお、請求項2に記載の発明は、走行予定経路特定手段は、提示した計画区間に走行予定経路と一致するものが含まれるか否かを乗員に確認する確認手段を備え、確認手段により提示した計画区間に走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って走行予定経路と一致する計画区間を走行予定経路として特定することを特徴としている。
【0009】
このような構成によれば、提示した計画区間に走行予定経路と一致するものが含まれるか否かを乗員に確認し、提示した計画区間に走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って走行予定経路と一致する計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って容易に走行予定経路を特定することができる。
【0010】
また、請求項3に記載の発明は、走行予定経路特定手段は、確認手段により提示した計画区間に走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って、提示された計画区間を修正する計画区間修正手段を備え、乗員の操作に従って修正された計画区間を走行予定経路として特定することを特徴としている。
【0011】
このような構成によれば、提示した計画区間に走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って、提示された計画区間の修正が可能となっており、乗員の操作に従って修正された計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って計画区間を容易に修正し、走行予定経路として特定することができる。
【0012】
また、請求項4に記載の発明は、計画区間記憶手段は、地図表示画面に従って乗員に計画区間を指定させる計画区間指定手段と、乗員により指定された計画区間を走行計画の計画区間として特定するか否かを乗員に確認する第1の計画区間特定確認手段と、を備え、計画区間記憶手段は、第1の計画区間特定確認手段により指定された計画区間を走行計画の計画区間として特定することが確認された場合、指定された計画区間を走行計画の計画区間として特定することを特徴としている。
【0013】
このような構成によれば、地図表示画面に従って乗員に計画区間を指定させ、乗員により指定された計画区間を走行計画の計画区間として特定するか否かを乗員に確認し、指定された計画区間を走行計画の計画区間として特定することが確認された場合、指定された計画区間が走行計画の計画区間として特定される。すなわち、乗員は地図表示画面に従って任意の区間を計画区間として指定し、この指定した計画区間を走行計画の計画区間として特定することができる。
【0014】
また、請求項5に記載の発明は、乗員の操作に応じて出発地から目的地に至る案内経路を探索する経路探索手段と、経路探索手段により探索された案内経路を走行計画の計画区間として特定するか否かを乗員に確認する第2の計画区間特定確認手段と、を備え、計画区間記憶手段は、第2の計画区間特定確認手段により探索された案内経路を走行計画の計画区間として特定することが確認された場合、探索された案内経路を走行計画の計画区間として特定することを特徴としている。
【0015】
このように、乗員の操作に応じて出発地から目的地に至る案内経路を探索し、この探索された案内経路を走行計画の計画区間として特定するか否かを乗員に確認し、探索された案内経路を走行計画の計画区間として特定することが確認された場合、探索された案内経路を走行計画の計画区間として特定することができる。
【0016】
また、請求項6に記載の発明は、経路探索手段により探索された案内経路を修正するか否かを乗員に確認する案内経路修正確認手段と、案内経路修正確認手段により案内経路を修正することが確認された場合、乗員の操作に従って案内経路を修正する案内経路修正手段と、を備え、計画区間記憶手段は、案内経路修正手段により修正された案内経路を走行計画の計画区間として特定することを特徴としている。
【0017】
このような構成によれば、探索された案内経路を修正するか否かを乗員に確認し、案内経路を修正することが確認された場合、乗員の操作に従って案内経路の修正が可能となっており、修正された案内経路が走行計画の計画区間として特定される。すなわち、乗員は探索された案内経路を修正し、修正した案内経路を走行計画の計画区間として特定することができる。
【0018】
また、請求項7に記載の発明は、車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を走行計画の計画区間として特定するか否かを乗員に確認する第3の計画区間特定確認手段と、を備え、計画区間記憶手段は、第3の計画区間特定確認手段により収集された走行軌跡を走行計画の計画区間として特定することが確認された場合、収集された走行軌跡を走行計画の計画区間として特定することを特徴としている。
【0019】
このように、車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を走行計画の計画区間として特定するか否かを乗員に確認し、収集された走行軌跡を走行計画の計画区間として特定することが確認された場合、収集された走行軌跡を走行計画の計画区間として特定することができる。
【0020】
また、請求項8に記載の発明は、記憶媒体に記憶された走行軌跡を修正するか否かを乗員に確認する走行軌跡修正確認手段と、走行軌跡修正確認手段により走行軌跡を修正することが確認された場合、乗員の操作に従って走行軌跡を修正する走行軌跡修正手段と、を備え、計画区間記憶手段は、走行軌跡修正手段により修正された走行軌跡を走行計画の計画区間として特定することを特徴としている。
【0021】
このような構成によれば、記憶媒体に記憶された走行軌跡を修正するか否かを乗員に確認し、走行軌跡を修正することが確認された場合、乗員の操作に従って走行軌跡の修正が可能となっており、修正された走行軌跡が走行計画の計画区間として特定される。すなわち、乗員は走行軌跡を修正し、修正した走行軌跡を走行計画の計画区間として特定することができる。
【0022】
また、請求項9に記載の発明は、車両が計画区間内から計画区間外へ退出したか否かを判定する退出判定手段と、退出判定手段により車両が計画区間内から計画区間外へ退出したと判定された場合、車両が計画区間から退出したことを乗員に報知する退出報知手段と、を備えたことを特徴としている。
【0023】
このような構成によれば、車両が計画区間内から計画区間外へ退出したか否かを判定し、車両が計画区間内から計画区間外へ退出したと判定された場合、車両が計画区間から退出したことが乗員に報知されるので、乗員は車両が計画区間から退出したことを容易に認識することができる。
【0024】
また、請求項10に記載の発明は、車両が計画区間外から計画区間内へ進入したか否かを判定する進入判定手段と、進入判定手段により車両が計画区間外から計画区間内へ進入したと判定された場合、車両が計画区間へ進入したことを乗員に報知する進入報知手段と、を備えたことを特徴としている。
【0025】
このような構成によれば、車両が計画区間外から計画区間内へ進入したか否かを判定し、車両が計画区間外から計画区間内へ進入したと判定された場合、車両が計画区間へ進入したことが乗員に報知されるので、乗員は車両が計画区間へ進入したことを容易に認識することができる。
【発明を実施するための最良の形態】
【0026】
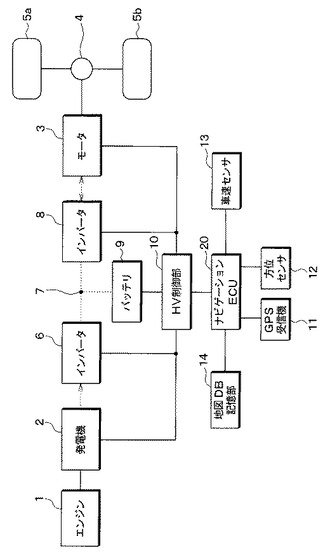
本発明の一実施形態に係るハイブリッド車両の駆動制御装置の概略構成を図1に概略的に示す。このハイブリッド車両には、内燃機関としてのエンジン1、発電機2、モータ3、差動装置4、タイヤ5a、5b、インバータ6、DCリンク7、インバータ8、バッテリ9、HV制御部10、GPS受信機11、方位センサ12、車速センサ13、地図DB記憶部14、およびナビゲーションECU20が搭載されている。
【0027】
このハイブリッド車両は、エンジン1およびモータ3を走行用の動力源として走行する。エンジン1を動力源とする場合は、エンジン1の回転力が、図示しないクラッチ機構および差動装置4を介してタイヤ5a、5bに伝わる。また、モータ3を動力源とする場合は、バッテリ9の直流電力がDCリンク7およびインバータ8を介して交流電力に変換され、その交流電力によってモータ3が作動し、このモータ3の回転力が、差動装置4を介してタイヤ5a、5bに伝わる。以下、エンジン1のみを動力源とする走行のモードを、エンジン走行という。また、エンジン1およびモータ3のうち少なくともモータ3を動力源とする走行のモードを、アシスト走行という。
【0028】
また、エンジン1の回転力は発電機2にも伝えられ、その回転力によって発電機2が交流電力を生成し、生成された交流電力はインバータ6、DCリンク7を介して直流電力に変換され、その直流電力がバッテリ9に蓄積される。このようなバッテリ9への充電は、燃料を使用したエンジン1の作動による充電である。以下、この種の充電を、内燃充電という。
【0029】
また、図示しない制動機構によりハイブリッド車両が減速すると、その減速時の抵抗力がモータ3に回転力として加わり、この回転力によってモータ3が交流電力を生成し、生成された交流電力がインバータ8、DCリンク7を介して直流電力に変換され、その直流電力がバッテリ9に蓄積される。以下、この種の充電を、回生充電という。
【0030】
HV制御部10は、ナビゲーションECU20からの指令等に応じて、発電機2、モータ3、インバータ6、8、バッテリ9の上述のような作動の実行・非実行等を制御する。HV制御部10は、例えばマイクロコンピュータを用いて実現してもよいし、下記のような機能を実現するための専用の回路構成を有するハードウェアであってもよい。
【0031】
より具体的には、HV制御部10は、現在SOC、基準SOCという2つの値を記憶しており、また、以下の(A)、(B)の処理を行う。
(A)ナビゲーションECU20から入力される制御指標である制御目標値(計画SOC)に基づいて、基準SOCの値を変化させ、ハイブリッド車両のバッテリ9の充電量を計画SOCに近づけるように、発電機2、モータ3、インバータ6、8、バッテリ9等のアクチュエータを制御する。
(B)定期的に現在SOCをナビゲーションECU20に通知する。
【0032】
SOC(State Of Charge)とは、バッテリの残量を表す指標であり、その値が高いほど残量が多い。現在SOCは、現在のバッテリ9のSOCを示す。HV制御部10は、この現在SOCの値を、逐次バッテリ9の状態を検出することで、繰り返し更新する。基準SOCは、HV制御部10にて発電/アシストを判断する制御目標値(例えば60パーセント)である。この値はナビゲーションECU20からの制御によって変更可能となっている。
【0033】
HV制御部10は、ナビゲーションECU20から入力される制御目標値に基づいて、ハイブリッド車両の走行モードのエンジン走行、アシスト走行を切り替え、また、内燃充電の実行・非実行、回生充電の実行・非実行を切り替える制御を行う。本実施形態における制御目標値は計画SOCである。HV制御部10は、現在SOCがこの計画SOCおよびその近傍の値を維持するよう、走行方法の決定および決定した走行方法に基づくアクチュエータの制御を実行する。
【0034】
GPS受信機11、方位センサ12および車速センサ13は、それぞれハイブリッド車両の位置、進行方向、走行速度を特定する周知のセンサである。地図DB記憶部14は、地図データを記憶する記憶媒体である。地図データは、複数の交差点のそれぞれに対応するノードデータ、および、交差点と交差点を結ぶ道路区間すなわちリンクのそれぞれに対応するリンクデータを有している。1つのノードデータは、当該ノードの識別番号、所在位置情報、種別情報を含む。また、1つのリンクデータは、当該リンクの識別番号(以下、リンクIDという)、位置情報、種別情報等を含んでいる。
【0035】
また、ナビゲーションECU20には、液晶等のディスプレイを有する表示部(図示せず)が接続されている。また、ナビゲーションECU20には、表示部のディスプレイの前面に重ねて配置されたタッチスイッチおよび表示部のディスプレイの周囲に配置されたメカニカルスイッチ等を有し、乗員のスイッチ操作に応じた信号を出力する操作部(図示せず)も接続されている。
【0036】
ナビゲーションECU20は、RAM、ROM、データ書き込み可能な耐久記憶媒体およびCPU(いずれも図示せず)を備えたコンピュータとして構成されている。耐久記憶媒体とは、ナビゲーションECU20の主電源の供給が停止してもデータを保持し続けることができる記憶媒体をいう。耐久記憶媒体としては、例えば、ハードディスクドライブ、フラッシュメモリ、EEPROM等の不揮発性記憶媒体、およびバックアップRAMがある。
【0037】
ナビゲーションECU20におけるCPUは、ROMまたは耐久記憶媒体に記憶されたプログラムに従って各種処理を実施する。ナビゲーションECU20の処理としては、GPS受信機11、方位センサ12および車速センサ13から取得した位置情報等に基づいて、車両が地図DB記憶部14の地図中のどの道路上にいるかを判定するマップマッチング処理、操作装置(図示せず)を用いたユーザによる目的地指定に基づいて、指定された目的地までの最適な案内経路を決定する経路探索処理、目的地点までの案内経路に沿って走行案内を行う経路案内処理、車両の走行に伴って走行計画を規定するための走行情報を一定走行距離毎に収集して耐久記憶媒体に記憶させる走行情報記憶処理等がある。
【0038】
また、本実施形態におけるナビゲーションECU20は、地図表示画面に従って乗員により指定された選択経路区間を計画区間として登録する計画区間記憶処理1、経路探索により探索された案内経路を計画区間として登録する計画区間記憶処理2、車両の走行に伴って収集した走行軌跡を計画区間として登録する計画区間記憶処理3、耐久記憶媒体に記憶された計画区間を乗員に提示し、乗員により特定された走行予定経路を計画区間として走行計画を作成する走行計画作成処理、車両の走行に伴って計画区間外へ退出した場合や計画区間内へ進入した場合に乗員に報知する報知処理、耐久記憶媒体に記憶した走行計画に従ってエンジンとモータの駆動制御を行うHV制御処理を実施する。以下、これらの各処理について説明する。
【0039】
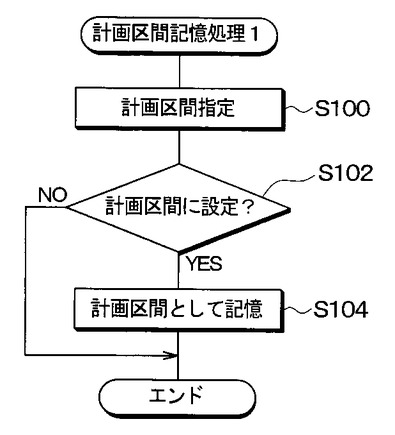
最初に、図2に従って、計画区間記憶処理1について説明する。メニュー画面に従って、乗員により計画区間記憶処理1の開始が指示されると、ナビゲーションECU20は、図2に示す処理を実施する。
【0040】
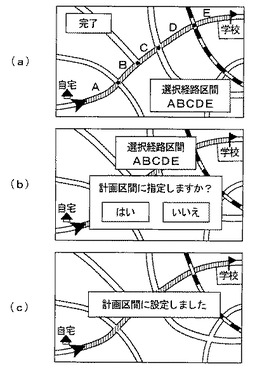
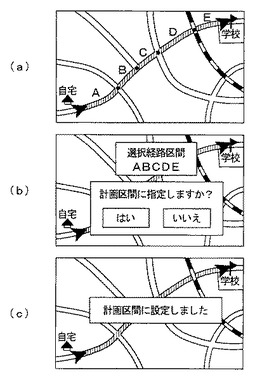
まず、乗員に計画区間を指定させる(S100)。具体的には、図3(a)に示すような地図表示画面を表示部に表示させ、乗員に計画区間として登録する区間を区間単位で選択するように指示する。なお、乗員が特定区間上を選択操作する度に、その区間の選択状態が切り替わるようになっている。
【0041】
ここで、乗員は計画区間として登録する区間を区間単位(例えば、リンク単位)で選択し、登録する区間の選択が完了すると、「完了」と表示された部分を選択操作するようになっている。したがって、例えば、計画区間として区間A〜Eを指定する場合、乗員は区間A〜Eを選択経路区間として選択した後、「完了」と表示された部分を選択操作する。
【0042】
次に、計画区間に設定するか否かを判定する(S102)。具体的には、図3(b)に示すような確認画面を表示部に表示させ、選択経路区間A〜Eを計画区間に設定するか否かを判定する。
【0043】
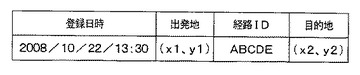
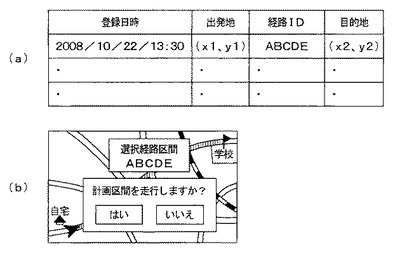
ここで、乗員の操作により、確認画面に表示された「はい」が選択操作されると、S102の判定はYESとなり、選択経路区間A〜Eを計画区間として耐久記憶媒体に記憶させるとともに(S104)、図3(c)に示すような確認画面を表示部に表示させる。このようにして、耐久記憶媒体には、図4に示すような、登録日時、出発地(出発地座標)、経路ID、目的地(目的地座標)が記憶される。なお、経路IDは、例えば、各区間を識別する識別情報(例えば、リンクID)を用いたリンク列として登録される。
【0044】
また、乗員の操作により確認画面に表示された「いいえ」が選択操作されると、S102の判定はNOとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させることなく、本処理を終了する。
【0045】
次に、図5に従って、計画区間記憶処理2について説明する。メニュー画面に従って、乗員により計画区間記憶処理2の開始が指示されると、ナビゲーションECU20は、図5に示す処理を実施する。
【0046】
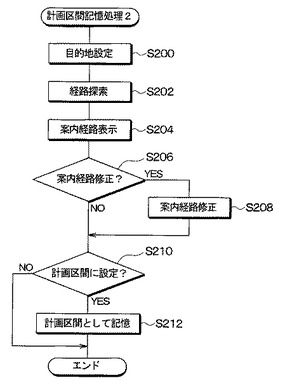
まず、目的地の設定を行う(S200)。具体的には、目的地検索画面等の目的地を設定するための画面を表示部に表示させ、ユーザ操作に応じて目的地検索処理等を実施し、乗員の操作により目的地として特定された施設、地点等を目的地として設定する。
【0047】
次に、経路探索を実施する(S202)。出発地から目的地に至る最適経路を案内経路として探索する。なお、特に指定のない限り、現在位置を出発地として経路探索を実施するが、乗員の操作により現在位置以外の地点を出発地として経路探索することも可能である。
【0048】
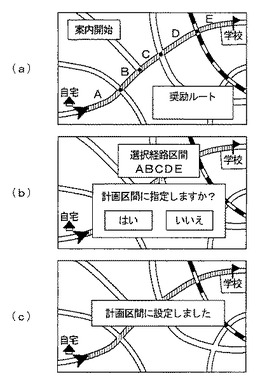
次に、探索された案内経路を表示部に表示させる(S204)。図6(a)に、案内経路が表示された表示画面の表示例を示す。図に示すように、案内経路(図中では、推奨ルートと示す)A〜Eが選択経路区間として地図上に表示され、更に、経路案内の開始を指示するための「案内開始」と示された表示部が表示される。なお、この「案内開始」と示された表示部が選択操作されると、経路案内処理を開始するようになっている。
【0049】
次に、案内経路を修正するか否かを判定する(S206)。具体的には、「案内経路を修正しますか」といったメッセージとともに乗員に「はい」と「いいえ」のいずれかを選択させる画面を表示させる。
【0050】
ここで、乗員が「はい」を選択操作すると、S206の判定はYESとなり、次に、案内経路を修正する(S208)。具体的には、案内経路を修正する修正画面を表示させ、この修正画面に従って乗員に地図表示画面上の区間を区間単位で選択操作させることにより表示させた案内経路の出発地および目的地の少なくとも一方を修正させ、S210へ進む。
【0051】
また、乗員が「いいえ」を選択操作すると、S206の判定はNOとなり、案内経路を修正することなく、S210へ進む。
【0052】
S210では、選択経路区間として表示された案内経路を計画区間に設定するか否かを判定する。具体的には、図6(b)に示すような確認画面を表示部に表示させ、選択経路区間を計画区間に設定するか否かを判定する。
【0053】
ここで、乗員の操作により、確認画面に表示された「はい」が選択操作されると、S210の判定はYESとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させるとともに(S212)、図6(c)に示すような確認画面を表示部に表示させる。このようにして、耐久記憶媒体には、図7に示すような、登録日時、出発地(出発地座標)、経路ID、目的地(目的地座標)が記憶される。
【0054】
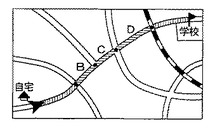
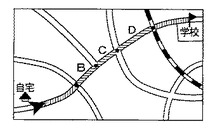
なお、S208にて案内経路が修正され、例えば、案内経路A〜Eが、図8に示すような案内経路B〜Dに変更された場合には、案内経路B〜Dが計画区間として耐久記憶媒体に記憶される。
【0055】
上記したように、探索された案内経路を計画区間として耐久記憶媒体に記憶させることもでき、探索された案内経路を修正し、修正した案内経路を計画区間として耐久記憶媒体に記憶させることもできるようになっている。
【0056】
また、乗員の操作により、確認画面に表示された「いいえ」が選択操作されると、S210の判定はNOとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させることなく、本処理を終了する。
【0057】
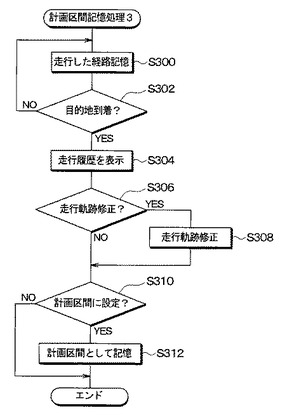
次に、図9に従って、計画区間記憶処理3について説明する。メニュー画面に従って、乗員により計画区間記憶処理3の開始が指示されると、ナビゲーションECU20は、図9に示す処理を実施する。
【0058】
まず、走行した経路軌跡を記憶する(S300)。具体的には、予め定められた区間毎に現在位置を特定し、当該現在位置をRAMに記憶させるとともに、車両が位置する道路区間を特定し、当該道路区間をRAMに記憶させる。
【0059】
次に、目的地に到着したか否かを判定する(S302)。本実施形態では、パーキングブレーキがオン状態となったか否かを示す信号に基づいて目的地に到着したか否かを判定する。なお、この判定は、例えば、シフトレバーがパーキング位置にあるか否かを示す信号等、パーキングブレーキがオン状態となったか否かを示す信号以外の信号に基づいて判定してもよい。
【0060】
車両が目的地に到着するまで、S302の判定はNOとなり、S300の処理が繰り返し実施され、車両の走行に伴って収集された走行軌跡が耐久記憶媒体に記憶される。
【0061】
そして、車両が目的地に到着すると、S302の判定はYESとなり、次に、走行軌跡を表示する(S304)。図10(a)に、走行軌跡が表示された表示画面の表示例を示す。図に示すように、走行軌跡A〜Eが選択経路区間として地図上に表示される。
【0062】
次に、走行軌跡を修正するか否かを判定する(S306)。具体的には、「走行軌跡を修正しますか」といったメッセージとともに乗員に「はい」と「いいえ」のいずれかを選択させる画面を表示させる。
【0063】
ここで、乗員が「はい」を選択操作すると、S306の判定はYESとなり、次に、走行軌跡を修正する(S308)。具体的には、表示された走行軌跡の修正画面を表示させ、この修正画面に従って乗員に地図表示画面上の区間を区間単位で選択操作させることにより表示させた計画区間の走行開始地点および走行終了地点の少なくとも一方を修正させ、S310へ進む。
【0064】
また、乗員が「いいえ」を選択操作すると、S306の判定はNOとなり、案内経路を修正することなく、S310へ進む。
【0065】
S310では、選択経路区間として表示された案内経路を計画区間に設定するか否かを判定する。具体的には、図10(b)に示すような確認画面を表示部に表示させ、選択経路区間を計画区間に設定するか否かを判定する。
【0066】
ここで、乗員の操作により、確認画面に表示された「はい」が選択操作されると、S210の判定はYESとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させるとともに(S312)、図10(c)に示すような確認画面を表示部に表示させる。このようにして、耐久記憶媒体には、図11に示すような、登録日時、出発地(出発地座標)、経路ID、目的地(目的地座標)が記憶される。
【0067】
なお、S308にて走行軌跡が修正され、例えば、走行軌跡A〜Eが、図12に示すような走行軌跡B〜Dに変更された場合には、走行軌跡B〜Dが計画区間として耐久記憶媒体に記憶される。
【0068】
上記したように、計画区間記憶処理1〜3により、走行計画の計画区間を耐久記憶媒体に記憶させることが可能となっている。
【0069】
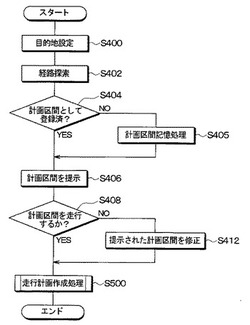
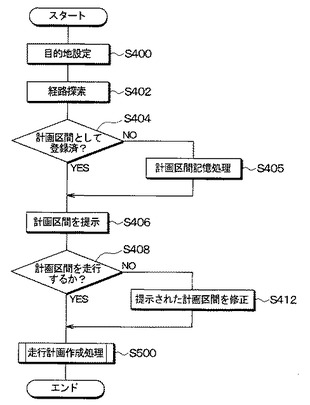
次に、図13に従って、走行計画作成処理について説明する。メニュー画面に従って、乗員により走行計画作成処理の開始が指示されると、ナビゲーションECU20は、図13に示す処理を実施する。なお、この走行計画作成処理を開始する前に、計画区間記憶処理1〜3のいずれかにより走行計画の計画区間が耐久記憶媒体に記憶されているものとする。
【0070】
まず、目的地の設定を行う(S400)。ここでは、図5のS200と同様に、目的地検索画面等の目的地を設定するための画面を表示部に表示させ、ユーザ操作に応じて目的地検索処理等を実施し、乗員の操作により目的地として特定された施設、地点等を目的地として設定する。
【0071】
次に、経路探索を実施する(S402)。ここでは、図5のS202と同様に、出発地から目的地に至る最適経路を案内経路として探索する。
【0072】
次に、案内経路が計画区間として登録済みであるか否かを判定する(S404)。具体的には、探索された案内経路と同じ区間が計画区間として耐久記憶媒体に記憶されているか否かに基づいて案内経路が計画区間として登録済みであるか否かを判定する。
【0073】
ここで、案内経路と同じ区間が計画区間として耐久記憶媒体に記憶されている場合、S404の判定はYESとなり、S406へ進む。
【0074】
また、案内経路と同じ区間が計画区間として耐久記憶媒体に記憶されていない場合、S404の判定はNOとなり、次に、計画区間記憶処理を実施する(S405)。この計画区間記憶処理は、図4におけるS204〜S212と同様である。すなわち、S402にて探索された案内経路について図4におけるS204〜S212と同様の処理を実施し、S406へ進む。
【0075】
S406では、耐久記憶媒体に記憶されている計画区間を乗員に提示する。具体的には、現在位置が自車の現在位置と一致する計画区間を耐久記憶媒体に記憶されている案内経路から抽出して表示部に表示させる。このように、耐久記憶媒体に記憶されている案内経路の一部を抽出して表示するようにしてもよく、また、耐久記憶媒体に記憶されている全ての案内経路を表示部に表示させるようにしてもよい。図14(a)に、複数の計画区間が表示された場合の表示例を示す。本実施形態では、図に示すように、計画区間を一覧形式で選択可能に表示部に表示させる。
【0076】
次に、計画区間を走行するか否かを判定する(S408)。具体的には、乗員により特定の計画区間が選択されると、図14(b)に示すようなその選択経路区間が走行予定経路として走行するか否かを確認する確認画面を表示させ、乗員が計画区間を走行するか否かを判定する。すなわち、表示部に表示された計画区間に、乗員が意図する走行予定区間と一致するものが存在するか否かを判定する。
【0077】
ここで、乗員が「はい」を選択操作すると、S408の判定はYESとなり、走行計画作成処理(S500)へ進む。この場合、走行計画作成処理では、選択された計画区間を対象として走行計画を作成する。
【0078】
また、乗員が「いいえ」を選択操作すると、S408の判定はNOとなり、提示された計画区間を修正する(S412)。具体的には、ユーザに特定の計画区間を選択させた後、選択された計画区間の修正画面を表示させる。そして、この修正画面に従って乗員に地図表示画面上の区間を区間単位で選択操作させ、表示した計画区間の走行開始地点および走行終了地点の少なくとも一方を修正させ、S500へ進む。この場合、走行計画作成処理では、修正された計画区間を対象として走行計画を作成する。
【0079】
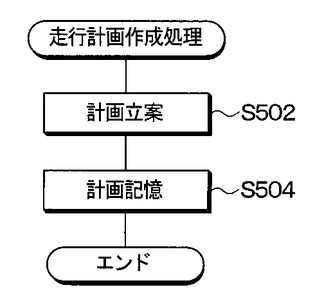
図15に、走行計画作成処理(S500)のフローチャートを示す。この走行計画作成処理では、まず、計画立案を行う(S502)。具体的には、まず、計画区間を走行するのに必要なエネルギーを、耐久記憶媒体に記憶された走行情報に基づいて算出する。そして、耐久記憶媒体に記憶された走行情報から道路識別子毎に走行方法を決定する。具体的には、HV制御部10より基準SOCを取得し、この基準SOCと出発地から目的地に到着するまでの走行に伴って耐久記憶媒体に記憶された走行情報とに基づいて、出発地から目的地までの計画区間において、発電効率およびアシスト効率を算出してエンジン走行を行うかまたはアシスト走行を行うかの選択、内燃充電を行うか否かの選択、および、回生充電を行うか否かの選択といった制御方法を道路識別子毎に決定する。そして、耐久記憶媒体に記憶された走行情報に基づいて全区間のSOC管理計画(走行計画に相当する)を作成する。SOC管理計画は、目的地までの計画SOC(制御目標値)の推移を予想したものである。なお、このようなSOC管理計画を作成する手法は周知(特開2001−183150号公報、「新エネルギー自動車の開発123〜124頁」CMC出版等参照)である。
【0080】
次に、計画したSOC管理計画を耐久記憶媒体に記憶させ(S502)、図15および図13に示した各処理を終了する。
【0081】
このようにして、乗員の操作に応じて特定された走行予定区間を計画区間とした走行計画が作成され、耐久記憶媒体に記憶される。
【0082】
次に、図16に従って、報知処理について説明する。この報知処理は、後述するHV制御処理と並行して繰り返し実施される。
【0083】
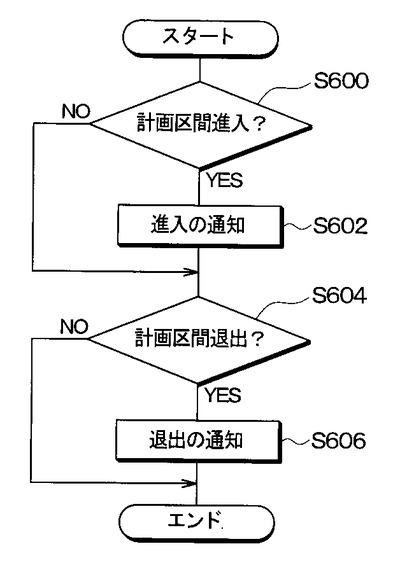
まず、車両が計画区間外から計画区間内へ進入したか否かを判定する(S600)。具体的には、前回の判定結果と今回の判定結果を比較して車両の現在位置が計画区間外から計画区間内に位置するようになったか否かを判定する。
【0084】
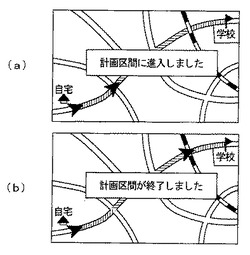
ここで、車両の現在位置が計画区間外から計画区間内に位置するようになると、S600の判定はYESとなり、進入の通知を行う(S602)。具体的には、図17(a)に示すような表示画面を表示させ、乗員に計画区間に進入したことを報知する。
【0085】
また、車両の現在位置が継続して計画区間内に位置する場合、あるいは車両の現在位置が継続して計画区間外に位置する場合等、車両の現在位置が計画区間外から計画区間内に位置するようになっていない場合、S602の判定はNOとなり、S602の報知を行うことなく、S604へ進む。
【0086】
S604では、車両が計画区間内から計画区間外へ退出したか否かを判定する(S604)。具体的には、前回の判定結果と今回の判定結果を比較して車両の現在位置が計画区間内から計画区間外に位置するようになったか否かを判定する。
【0087】
ここで、車両の現在位置が計画区間内から計画区間外に位置するようになると、S604の判定はYESとなり、退出の通知を行う(S606)。具体的には、図17(b)に示すような表示画面を表示させ、乗員に計画区間から退出したことを報知する。
【0088】
また、車両の現在位置が継続して計画区間内に位置する場合、あるいは車両の現在位置が継続して計画区間外に位置する場合等、車両の現在位置が計画区間内から計画区間外に位置するようになっていない場合、S604の判定はNOとなり、S606の報知を行うことなく、本処理を終了する。
【0089】
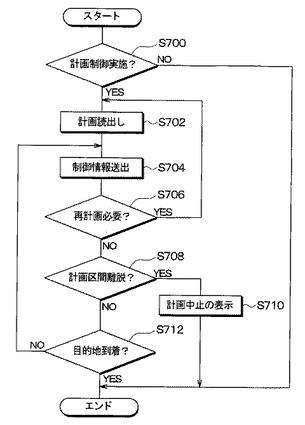
次に、図18に従って、HV制御処理について説明する。走行計画を作成し、この走行計画を耐久記憶媒体に記憶すると、ナビゲーションECU20は、図18に示す処理を実施する。
【0090】
まず、計画制御を実施するか否かを判定する(S700)。具体的には、作成した走行計画を表示部に表示させ、乗員に走行計画に従った駆動制御を実施するか否かを確認する。
【0091】
ここで、乗員の操作により走行計画に従った駆動制御を実施しないことが確認された場合、S700の判定はNOとなり、本処理を終了する。
【0092】
また、乗員の操作により走行計画に従った駆動制御を実施することが確認された場合、S700の判定はYESとなり、耐久記憶媒体から走行計画を読出し(S702)、次に、制御情報の送出を行う(S704)。具体的には、HV制御部10より通知される現在SOCと、SOC管理計画に含まれる現在位置における計画SOCに基づいて、ハイブリッド車両のバッテリ9の充電量を、現在位置における計画SOCに近づけるような指令(制御情報)をHV制御部10へ送出する。
【0093】
次に、計画SOCと現在SOCとの乖離幅が予め定められた閾値よりも大きいか否かに基づいて走行計画の再計画が必要か否かを判定する(S706)。
【0094】
ここで、計画SOCと現在SOCとの乖離幅が予め定められた閾値未満の場合、S706の判定はNOとなり、次に、計画区間を離脱したか否かを判定する(S708)。具体的には、車両の現在位置が計画区間上に位置するか否かに基づいて計画区間を離脱したか否かを判定する。
【0095】
ここで、車両の現在位置が計画区間上に位置する場合、S708の判定はNOとなり、次に、目的地に到着したか否かを判定する(S712)。
【0096】
ここで、車両が目的地に到着するまで、S712の判定はNOとなり、SS704へ戻り、上記処理が繰り返し実施される。
【0097】
また、計画SOCと現在SOCとの乖離幅が予め定められた閾値よりも大きい場合、S706の判定はYESとなり、図示してないが、図15に示した走行計画作成処理(S500)を再度実施し、S702へ戻る。この走行計画作成処理の再実施により、新たな走行計画が作成され、この走行計画に従った駆動制御が行われるようになる。
【0098】
また、車両の現在位置が計画区間上に位置するか否かに基づいて計画区間を離脱したと判定された場合、S708の判定はYESとなり、走行計画に従った駆動制御を中止するとともに、走行計画に従った駆動制御を中止する旨を表示部に表示させ(S710)、本処理を終了する。なお、本実施形態では、図19に示すような、「計画区間からはずれました 計画制御を中止します」といったメッセージを含む表示画面が表示部に表示される。
【0099】
また、車両が目的地に到着すると、S712の判定はYESとなり、本処理を終了する。
【0100】
上記した構成によれば、走行計画の計画区間を特定し、当該計画区間を耐久記憶媒体に記憶させ、耐久記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させ、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画が作成される。すなわち、乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成することができる。
【0101】
また、提示した計画区間に走行予定経路と一致するものが含まれるか否かを乗員に確認し、提示した計画区間に走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って走行予定経路と一致する計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って容易に走行予定経路を特定することができる。
【0102】
また、提示した計画区間に走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って提示された計画区間の修正が可能となっており、乗員の操作に従って修正された計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って計画区間を容易に修正し、走行予定経路として特定することができる。
【0103】
また、地図表示画面に従って乗員に計画区間を指定させ、乗員により指定された計画区間を走行計画の計画区間として特定するか否かを乗員に確認し、指定された計画区間を走行計画の計画区間として特定することが確認された場合、指定された計画区間が走行計画の計画区間として特定される。すなわち、乗員は地図表示画面に従って任意の区間を計画区間として指定し、この指定した計画区間を走行計画の計画区間として特定することができる。
【0104】
また、乗員の操作に応じて出発地から目的地に至る案内経路を探索し、この探索された案内経路を走行計画の計画区間として特定するか否かを乗員に確認し、探索された案内経路を走行計画の計画区間として特定することが確認された場合、探索された案内経路を走行計画の計画区間として特定することができる。
【0105】
また、探索された案内経路を修正するか否かを乗員に確認し、案内経路を修正することが確認された場合、乗員の操作に従って案内経路の修正が可能となっており、修正された案内経路が走行計画の計画区間として特定される。すなわち、乗員は探索された案内経路を修正し、修正した案内経路を走行計画の計画区間として特定することができる。
【0106】
また、車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を走行計画の計画区間として特定するか否かを乗員に確認し、収集された走行軌跡を走行計画の計画区間として特定することが確認された場合、収集された走行軌跡を走行計画の計画区間として特定することができる。
【0107】
また、記憶媒体に記憶された走行軌跡を修正するか否かを乗員に確認し、走行軌跡を修正することが確認された場合、乗員の操作に従って走行軌跡の修正が可能となっており、修正された走行軌跡が走行計画の計画区間として特定される。すなわち、乗員は走行軌跡を修正し、修正した走行軌跡を走行計画の計画区間として特定することができる。
【0108】
また、車両が計画区間内から計画区間外へ退出したか否かを判定し、車両が計画区間内から計画区間外へ退出したと判定された場合、車両が計画区間から退出したことが乗員に報知されるので、乗員は車両が計画区間から退出したことを容易に認識することができる。
【0109】
また、車両が計画区間外から計画区間内へ進入したか否かを判定し、車両が計画区間外から計画区間内へ進入したと判定された場合、車両が計画区間へ進入したことが乗員に報知されるので、乗員は車両が計画区間へ進入したことを容易に認識することができる。
【0110】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0111】
例えば、上記実施形態では、S708にて計画区間を離脱したと判定された場合、走行計画に従った駆動制御を中止するとともに、S710にて走行計画に従った駆動制御を中止する旨を表示し、HV制御処理を終了したが、S708にて計画区間を離脱したと判定された場合、走行計画に従った駆動制御を中止するとともに、S710にて走行計画に従った駆動制御を中止する旨を表示させた後、図13に示した走行計画作成処理を実施するようにしてもよい。
【0112】
また、上記実施形態では、S400、S402にて、目的地設定および経路探索を実施し、S404にて、探索された案内経路が計画区間として登録済みであるか否かを判定し、探索された案内経路が計画区間として登録済みであると判定された場合、探索された案内経路を乗員に提示して、乗員に意図する走行予定経路を特定させる構成を示したが、目的地設定、経路探索等を実施することなく、耐久記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させるようにしてもよい。
【0113】
また、上記実施形態では、図14(a)に示したように、計画区間を一覧形式で選択可能に表示部に表示させたが、計画区間を地図形式で表示するようにしてもよい。また、計画区間を一覧形式と地図形式の両方を用いて表示するようにしてもよい。
【0114】
また、上記実施形態では、S208にて、案内経路を修正する際に、表示した案内経路の出発地および目的地の少なくとも一方を乗員に修正させ、S210にて、修正された案内経路を計画区間に設定するか否かを確認する構成を示したが、例えば、S208にて、表示した案内経路を複数の計画区間に分割するように乗員に修正させ、S210にて、分割された計画区間のうち乗員により選択された特定の計画区間を計画区間に設定するか否かを確認するようにしてもよい。
【0115】
また、上記実施形態では、S308にて、走行軌跡を修正する際に、表示した走行軌跡の走行開始地点および走行終了地点の少なくとも一方を乗員に修正させ、S310にて、修正された走行軌跡を計画区間に設定するか否かを確認する構成を示したが、例えば、S308にて、表示した走行軌跡を複数の計画区間に分割するように乗員に修正させ、S310にて、分割された計画区間のうち乗員により選択された特定の計画区間を計画区間に設定するか否かを確認するようにしてもよい。
【0116】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、計画区間記憶処理1(S100〜S104)、計画区間記憶処理2(S200〜S212)および計画区間記憶処理3(S300〜S312)が計画区間記憶手段に相当し、S400〜S412が走行予定経路特定手段に相当し、S500が走行計画作成手段に相当し、S408が確認手段に相当し、S412が計画区間修正手段に相当し、S100が計画区間指定手段に相当し、S102が第1の計画区間特定確認手段に相当し、S202が経路探索手段に相当し、S210が第2の計画区間特定確認手段に相当し、S206が案内経路修正確認手段に相当し、S208が案内経路修正手段に相当し、S310が第3の計画区間特定確認手段に相当し、S306が走行軌跡修正確認手段に相当し、S308が走行軌跡修正手段に相当し、S604が退出判定手段に相当し、S606が退出報知手段に相当し、S600が進入判定手段に相当し、S602が進入報知手段に相当する。
【図面の簡単な説明】
【0117】
【図1】本発明の一実施形態に係るハイブリッド車両の駆動制御装置の概略構成を示す図である。
【図2】計画区間記憶処理1のフローチャートである。
【図3】(a)〜(c)は計画区間記憶処理1における表示画面の表示例を示す図である。
【図4】耐久記憶媒体に記憶される選択経路区間について説明するための図である。
【図5】計画区間記憶処理2のフローチャートである。
【図6】(a)〜(c)は計画区間記憶処理2における表示画面の表示例を示す図である。
【図7】耐久記憶媒体に記憶される選択経路区間について説明するための図である。
【図8】計画区間記憶処理2について説明するための図である。
【図9】計画区間記憶処理3のフローチャートである。
【図10】(a)〜(c)は計画区間記憶処理3における表示画面の表示例を示す図である。
【図11】耐久記憶媒体に記憶される選択経路区間について説明するための図である。
【図12】計画区間記憶処理3について説明するための図である。
【図13】走行計画作成処理のフローチャートである。
【図14】(a)、(b)は、計画区間記憶処理3における表示画面の表示例を示す図である。
【図15】走行計画作成処理のフローチャートである。
【図16】報知処理のフローチャートである。
【図17】(a)、(b)は、報知処理における表示画面の表示例を示す図である。
【図18】HV制御処理のフローチャートである。
【図19】HV制御処理における表示画面の表示例を示す図である。
【符号の説明】
【0118】
1 エンジン
2 発電機
3 モータ
4 差動装置
5a タイヤ
5b タイヤ
6 インバータ
7 DCリンク
8 インバータ
9 バッテリ
10 HV制御部
11 GPS受信機
12 方位センサ
13 車速センサ
14 地図DB記憶部
20 ナビゲーションECU
【技術分野】
【0001】
本発明は、内燃機関とモータを走行用の動力源として走行するハイブリッド車両の走行計画を作成する走行計画作成装置に関するものである。
【背景技術】
【0002】
従来、エンジンとモータを走行用の動力源として走行するハイブリッド車両において、エンジンの消費する燃料を低減するために、出発地から目的地までの道路状況に応じて燃料消費量が最小となるように、エンジンおよびモータの運転スケジュールを設定し、この運転スケジュールに従ってエンジンおよびモータの駆動制御を行う装置がある(例えば、特許文献1、2参照)。
【特許文献1】特開2000−333305号公報
【特許文献2】特開2001−183150号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記特許文献1、2に記載の装置では、計画区間を設定する際に、出発地から目的地に至る案内経路を探索し、この案内経路を計画区間として設定したり、通勤路のような走行頻度の高い経路を走行時刻とともにナビゲーション装置に記録しておき、この記録経路を記録時刻とほぼ同時に走行する場合にはこの記録経路と同じ経路を走行するものと推定し、この記録経路を計画区間として設定したりするようになっている。
【0004】
しかしながら、このような計画区間の設定方法では、必ずしも乗員の意図する走行予定経路が計画区間として設定されるとは限らない。また、一度設定された計画区間を修正したくても、乗員は計画区間を修正することができない。このため、乗員の意図する走行予定経路と異なる区間を計画区間として作成された走行計画に従ってエンジンとモータの駆動制御が行われ、本来の低燃費走行を実現できない場合があった。
【0005】
本発明は上記点に鑑みたもので、乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明は、内燃機関とモータを走行用の動力源として走行するハイブリッド車両に搭載され、計画された走行計画に従って内燃機関とモータの駆動制御を行うハイブリッド車両の走行計画作成装置であって、走行計画の計画区間を特定し、当該計画区間を記憶媒体に記憶させる計画区間記憶手段と、記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させる走行予定経路特定手段と、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画を作成する走行計画作成手段と、を備えたことを特徴としている。
【0007】
このような構成によれば、走行計画の計画区間を特定し、当該計画区間を記憶媒体に記憶させ、記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させ、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画が作成される。すなわち、乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成することができる。
【0008】
なお、請求項2に記載の発明は、走行予定経路特定手段は、提示した計画区間に走行予定経路と一致するものが含まれるか否かを乗員に確認する確認手段を備え、確認手段により提示した計画区間に走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って走行予定経路と一致する計画区間を走行予定経路として特定することを特徴としている。
【0009】
このような構成によれば、提示した計画区間に走行予定経路と一致するものが含まれるか否かを乗員に確認し、提示した計画区間に走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って走行予定経路と一致する計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って容易に走行予定経路を特定することができる。
【0010】
また、請求項3に記載の発明は、走行予定経路特定手段は、確認手段により提示した計画区間に走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って、提示された計画区間を修正する計画区間修正手段を備え、乗員の操作に従って修正された計画区間を走行予定経路として特定することを特徴としている。
【0011】
このような構成によれば、提示した計画区間に走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って、提示された計画区間の修正が可能となっており、乗員の操作に従って修正された計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って計画区間を容易に修正し、走行予定経路として特定することができる。
【0012】
また、請求項4に記載の発明は、計画区間記憶手段は、地図表示画面に従って乗員に計画区間を指定させる計画区間指定手段と、乗員により指定された計画区間を走行計画の計画区間として特定するか否かを乗員に確認する第1の計画区間特定確認手段と、を備え、計画区間記憶手段は、第1の計画区間特定確認手段により指定された計画区間を走行計画の計画区間として特定することが確認された場合、指定された計画区間を走行計画の計画区間として特定することを特徴としている。
【0013】
このような構成によれば、地図表示画面に従って乗員に計画区間を指定させ、乗員により指定された計画区間を走行計画の計画区間として特定するか否かを乗員に確認し、指定された計画区間を走行計画の計画区間として特定することが確認された場合、指定された計画区間が走行計画の計画区間として特定される。すなわち、乗員は地図表示画面に従って任意の区間を計画区間として指定し、この指定した計画区間を走行計画の計画区間として特定することができる。
【0014】
また、請求項5に記載の発明は、乗員の操作に応じて出発地から目的地に至る案内経路を探索する経路探索手段と、経路探索手段により探索された案内経路を走行計画の計画区間として特定するか否かを乗員に確認する第2の計画区間特定確認手段と、を備え、計画区間記憶手段は、第2の計画区間特定確認手段により探索された案内経路を走行計画の計画区間として特定することが確認された場合、探索された案内経路を走行計画の計画区間として特定することを特徴としている。
【0015】
このように、乗員の操作に応じて出発地から目的地に至る案内経路を探索し、この探索された案内経路を走行計画の計画区間として特定するか否かを乗員に確認し、探索された案内経路を走行計画の計画区間として特定することが確認された場合、探索された案内経路を走行計画の計画区間として特定することができる。
【0016】
また、請求項6に記載の発明は、経路探索手段により探索された案内経路を修正するか否かを乗員に確認する案内経路修正確認手段と、案内経路修正確認手段により案内経路を修正することが確認された場合、乗員の操作に従って案内経路を修正する案内経路修正手段と、を備え、計画区間記憶手段は、案内経路修正手段により修正された案内経路を走行計画の計画区間として特定することを特徴としている。
【0017】
このような構成によれば、探索された案内経路を修正するか否かを乗員に確認し、案内経路を修正することが確認された場合、乗員の操作に従って案内経路の修正が可能となっており、修正された案内経路が走行計画の計画区間として特定される。すなわち、乗員は探索された案内経路を修正し、修正した案内経路を走行計画の計画区間として特定することができる。
【0018】
また、請求項7に記載の発明は、車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を走行計画の計画区間として特定するか否かを乗員に確認する第3の計画区間特定確認手段と、を備え、計画区間記憶手段は、第3の計画区間特定確認手段により収集された走行軌跡を走行計画の計画区間として特定することが確認された場合、収集された走行軌跡を走行計画の計画区間として特定することを特徴としている。
【0019】
このように、車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を走行計画の計画区間として特定するか否かを乗員に確認し、収集された走行軌跡を走行計画の計画区間として特定することが確認された場合、収集された走行軌跡を走行計画の計画区間として特定することができる。
【0020】
また、請求項8に記載の発明は、記憶媒体に記憶された走行軌跡を修正するか否かを乗員に確認する走行軌跡修正確認手段と、走行軌跡修正確認手段により走行軌跡を修正することが確認された場合、乗員の操作に従って走行軌跡を修正する走行軌跡修正手段と、を備え、計画区間記憶手段は、走行軌跡修正手段により修正された走行軌跡を走行計画の計画区間として特定することを特徴としている。
【0021】
このような構成によれば、記憶媒体に記憶された走行軌跡を修正するか否かを乗員に確認し、走行軌跡を修正することが確認された場合、乗員の操作に従って走行軌跡の修正が可能となっており、修正された走行軌跡が走行計画の計画区間として特定される。すなわち、乗員は走行軌跡を修正し、修正した走行軌跡を走行計画の計画区間として特定することができる。
【0022】
また、請求項9に記載の発明は、車両が計画区間内から計画区間外へ退出したか否かを判定する退出判定手段と、退出判定手段により車両が計画区間内から計画区間外へ退出したと判定された場合、車両が計画区間から退出したことを乗員に報知する退出報知手段と、を備えたことを特徴としている。
【0023】
このような構成によれば、車両が計画区間内から計画区間外へ退出したか否かを判定し、車両が計画区間内から計画区間外へ退出したと判定された場合、車両が計画区間から退出したことが乗員に報知されるので、乗員は車両が計画区間から退出したことを容易に認識することができる。
【0024】
また、請求項10に記載の発明は、車両が計画区間外から計画区間内へ進入したか否かを判定する進入判定手段と、進入判定手段により車両が計画区間外から計画区間内へ進入したと判定された場合、車両が計画区間へ進入したことを乗員に報知する進入報知手段と、を備えたことを特徴としている。
【0025】
このような構成によれば、車両が計画区間外から計画区間内へ進入したか否かを判定し、車両が計画区間外から計画区間内へ進入したと判定された場合、車両が計画区間へ進入したことが乗員に報知されるので、乗員は車両が計画区間へ進入したことを容易に認識することができる。
【発明を実施するための最良の形態】
【0026】
本発明の一実施形態に係るハイブリッド車両の駆動制御装置の概略構成を図1に概略的に示す。このハイブリッド車両には、内燃機関としてのエンジン1、発電機2、モータ3、差動装置4、タイヤ5a、5b、インバータ6、DCリンク7、インバータ8、バッテリ9、HV制御部10、GPS受信機11、方位センサ12、車速センサ13、地図DB記憶部14、およびナビゲーションECU20が搭載されている。
【0027】
このハイブリッド車両は、エンジン1およびモータ3を走行用の動力源として走行する。エンジン1を動力源とする場合は、エンジン1の回転力が、図示しないクラッチ機構および差動装置4を介してタイヤ5a、5bに伝わる。また、モータ3を動力源とする場合は、バッテリ9の直流電力がDCリンク7およびインバータ8を介して交流電力に変換され、その交流電力によってモータ3が作動し、このモータ3の回転力が、差動装置4を介してタイヤ5a、5bに伝わる。以下、エンジン1のみを動力源とする走行のモードを、エンジン走行という。また、エンジン1およびモータ3のうち少なくともモータ3を動力源とする走行のモードを、アシスト走行という。
【0028】
また、エンジン1の回転力は発電機2にも伝えられ、その回転力によって発電機2が交流電力を生成し、生成された交流電力はインバータ6、DCリンク7を介して直流電力に変換され、その直流電力がバッテリ9に蓄積される。このようなバッテリ9への充電は、燃料を使用したエンジン1の作動による充電である。以下、この種の充電を、内燃充電という。
【0029】
また、図示しない制動機構によりハイブリッド車両が減速すると、その減速時の抵抗力がモータ3に回転力として加わり、この回転力によってモータ3が交流電力を生成し、生成された交流電力がインバータ8、DCリンク7を介して直流電力に変換され、その直流電力がバッテリ9に蓄積される。以下、この種の充電を、回生充電という。
【0030】
HV制御部10は、ナビゲーションECU20からの指令等に応じて、発電機2、モータ3、インバータ6、8、バッテリ9の上述のような作動の実行・非実行等を制御する。HV制御部10は、例えばマイクロコンピュータを用いて実現してもよいし、下記のような機能を実現するための専用の回路構成を有するハードウェアであってもよい。
【0031】
より具体的には、HV制御部10は、現在SOC、基準SOCという2つの値を記憶しており、また、以下の(A)、(B)の処理を行う。
(A)ナビゲーションECU20から入力される制御指標である制御目標値(計画SOC)に基づいて、基準SOCの値を変化させ、ハイブリッド車両のバッテリ9の充電量を計画SOCに近づけるように、発電機2、モータ3、インバータ6、8、バッテリ9等のアクチュエータを制御する。
(B)定期的に現在SOCをナビゲーションECU20に通知する。
【0032】
SOC(State Of Charge)とは、バッテリの残量を表す指標であり、その値が高いほど残量が多い。現在SOCは、現在のバッテリ9のSOCを示す。HV制御部10は、この現在SOCの値を、逐次バッテリ9の状態を検出することで、繰り返し更新する。基準SOCは、HV制御部10にて発電/アシストを判断する制御目標値(例えば60パーセント)である。この値はナビゲーションECU20からの制御によって変更可能となっている。
【0033】
HV制御部10は、ナビゲーションECU20から入力される制御目標値に基づいて、ハイブリッド車両の走行モードのエンジン走行、アシスト走行を切り替え、また、内燃充電の実行・非実行、回生充電の実行・非実行を切り替える制御を行う。本実施形態における制御目標値は計画SOCである。HV制御部10は、現在SOCがこの計画SOCおよびその近傍の値を維持するよう、走行方法の決定および決定した走行方法に基づくアクチュエータの制御を実行する。
【0034】
GPS受信機11、方位センサ12および車速センサ13は、それぞれハイブリッド車両の位置、進行方向、走行速度を特定する周知のセンサである。地図DB記憶部14は、地図データを記憶する記憶媒体である。地図データは、複数の交差点のそれぞれに対応するノードデータ、および、交差点と交差点を結ぶ道路区間すなわちリンクのそれぞれに対応するリンクデータを有している。1つのノードデータは、当該ノードの識別番号、所在位置情報、種別情報を含む。また、1つのリンクデータは、当該リンクの識別番号(以下、リンクIDという)、位置情報、種別情報等を含んでいる。
【0035】
また、ナビゲーションECU20には、液晶等のディスプレイを有する表示部(図示せず)が接続されている。また、ナビゲーションECU20には、表示部のディスプレイの前面に重ねて配置されたタッチスイッチおよび表示部のディスプレイの周囲に配置されたメカニカルスイッチ等を有し、乗員のスイッチ操作に応じた信号を出力する操作部(図示せず)も接続されている。
【0036】
ナビゲーションECU20は、RAM、ROM、データ書き込み可能な耐久記憶媒体およびCPU(いずれも図示せず)を備えたコンピュータとして構成されている。耐久記憶媒体とは、ナビゲーションECU20の主電源の供給が停止してもデータを保持し続けることができる記憶媒体をいう。耐久記憶媒体としては、例えば、ハードディスクドライブ、フラッシュメモリ、EEPROM等の不揮発性記憶媒体、およびバックアップRAMがある。
【0037】
ナビゲーションECU20におけるCPUは、ROMまたは耐久記憶媒体に記憶されたプログラムに従って各種処理を実施する。ナビゲーションECU20の処理としては、GPS受信機11、方位センサ12および車速センサ13から取得した位置情報等に基づいて、車両が地図DB記憶部14の地図中のどの道路上にいるかを判定するマップマッチング処理、操作装置(図示せず)を用いたユーザによる目的地指定に基づいて、指定された目的地までの最適な案内経路を決定する経路探索処理、目的地点までの案内経路に沿って走行案内を行う経路案内処理、車両の走行に伴って走行計画を規定するための走行情報を一定走行距離毎に収集して耐久記憶媒体に記憶させる走行情報記憶処理等がある。
【0038】
また、本実施形態におけるナビゲーションECU20は、地図表示画面に従って乗員により指定された選択経路区間を計画区間として登録する計画区間記憶処理1、経路探索により探索された案内経路を計画区間として登録する計画区間記憶処理2、車両の走行に伴って収集した走行軌跡を計画区間として登録する計画区間記憶処理3、耐久記憶媒体に記憶された計画区間を乗員に提示し、乗員により特定された走行予定経路を計画区間として走行計画を作成する走行計画作成処理、車両の走行に伴って計画区間外へ退出した場合や計画区間内へ進入した場合に乗員に報知する報知処理、耐久記憶媒体に記憶した走行計画に従ってエンジンとモータの駆動制御を行うHV制御処理を実施する。以下、これらの各処理について説明する。
【0039】
最初に、図2に従って、計画区間記憶処理1について説明する。メニュー画面に従って、乗員により計画区間記憶処理1の開始が指示されると、ナビゲーションECU20は、図2に示す処理を実施する。
【0040】
まず、乗員に計画区間を指定させる(S100)。具体的には、図3(a)に示すような地図表示画面を表示部に表示させ、乗員に計画区間として登録する区間を区間単位で選択するように指示する。なお、乗員が特定区間上を選択操作する度に、その区間の選択状態が切り替わるようになっている。
【0041】
ここで、乗員は計画区間として登録する区間を区間単位(例えば、リンク単位)で選択し、登録する区間の選択が完了すると、「完了」と表示された部分を選択操作するようになっている。したがって、例えば、計画区間として区間A〜Eを指定する場合、乗員は区間A〜Eを選択経路区間として選択した後、「完了」と表示された部分を選択操作する。
【0042】
次に、計画区間に設定するか否かを判定する(S102)。具体的には、図3(b)に示すような確認画面を表示部に表示させ、選択経路区間A〜Eを計画区間に設定するか否かを判定する。
【0043】
ここで、乗員の操作により、確認画面に表示された「はい」が選択操作されると、S102の判定はYESとなり、選択経路区間A〜Eを計画区間として耐久記憶媒体に記憶させるとともに(S104)、図3(c)に示すような確認画面を表示部に表示させる。このようにして、耐久記憶媒体には、図4に示すような、登録日時、出発地(出発地座標)、経路ID、目的地(目的地座標)が記憶される。なお、経路IDは、例えば、各区間を識別する識別情報(例えば、リンクID)を用いたリンク列として登録される。
【0044】
また、乗員の操作により確認画面に表示された「いいえ」が選択操作されると、S102の判定はNOとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させることなく、本処理を終了する。
【0045】
次に、図5に従って、計画区間記憶処理2について説明する。メニュー画面に従って、乗員により計画区間記憶処理2の開始が指示されると、ナビゲーションECU20は、図5に示す処理を実施する。
【0046】
まず、目的地の設定を行う(S200)。具体的には、目的地検索画面等の目的地を設定するための画面を表示部に表示させ、ユーザ操作に応じて目的地検索処理等を実施し、乗員の操作により目的地として特定された施設、地点等を目的地として設定する。
【0047】
次に、経路探索を実施する(S202)。出発地から目的地に至る最適経路を案内経路として探索する。なお、特に指定のない限り、現在位置を出発地として経路探索を実施するが、乗員の操作により現在位置以外の地点を出発地として経路探索することも可能である。
【0048】
次に、探索された案内経路を表示部に表示させる(S204)。図6(a)に、案内経路が表示された表示画面の表示例を示す。図に示すように、案内経路(図中では、推奨ルートと示す)A〜Eが選択経路区間として地図上に表示され、更に、経路案内の開始を指示するための「案内開始」と示された表示部が表示される。なお、この「案内開始」と示された表示部が選択操作されると、経路案内処理を開始するようになっている。
【0049】
次に、案内経路を修正するか否かを判定する(S206)。具体的には、「案内経路を修正しますか」といったメッセージとともに乗員に「はい」と「いいえ」のいずれかを選択させる画面を表示させる。
【0050】
ここで、乗員が「はい」を選択操作すると、S206の判定はYESとなり、次に、案内経路を修正する(S208)。具体的には、案内経路を修正する修正画面を表示させ、この修正画面に従って乗員に地図表示画面上の区間を区間単位で選択操作させることにより表示させた案内経路の出発地および目的地の少なくとも一方を修正させ、S210へ進む。
【0051】
また、乗員が「いいえ」を選択操作すると、S206の判定はNOとなり、案内経路を修正することなく、S210へ進む。
【0052】
S210では、選択経路区間として表示された案内経路を計画区間に設定するか否かを判定する。具体的には、図6(b)に示すような確認画面を表示部に表示させ、選択経路区間を計画区間に設定するか否かを判定する。
【0053】
ここで、乗員の操作により、確認画面に表示された「はい」が選択操作されると、S210の判定はYESとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させるとともに(S212)、図6(c)に示すような確認画面を表示部に表示させる。このようにして、耐久記憶媒体には、図7に示すような、登録日時、出発地(出発地座標)、経路ID、目的地(目的地座標)が記憶される。
【0054】
なお、S208にて案内経路が修正され、例えば、案内経路A〜Eが、図8に示すような案内経路B〜Dに変更された場合には、案内経路B〜Dが計画区間として耐久記憶媒体に記憶される。
【0055】
上記したように、探索された案内経路を計画区間として耐久記憶媒体に記憶させることもでき、探索された案内経路を修正し、修正した案内経路を計画区間として耐久記憶媒体に記憶させることもできるようになっている。
【0056】
また、乗員の操作により、確認画面に表示された「いいえ」が選択操作されると、S210の判定はNOとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させることなく、本処理を終了する。
【0057】
次に、図9に従って、計画区間記憶処理3について説明する。メニュー画面に従って、乗員により計画区間記憶処理3の開始が指示されると、ナビゲーションECU20は、図9に示す処理を実施する。
【0058】
まず、走行した経路軌跡を記憶する(S300)。具体的には、予め定められた区間毎に現在位置を特定し、当該現在位置をRAMに記憶させるとともに、車両が位置する道路区間を特定し、当該道路区間をRAMに記憶させる。
【0059】
次に、目的地に到着したか否かを判定する(S302)。本実施形態では、パーキングブレーキがオン状態となったか否かを示す信号に基づいて目的地に到着したか否かを判定する。なお、この判定は、例えば、シフトレバーがパーキング位置にあるか否かを示す信号等、パーキングブレーキがオン状態となったか否かを示す信号以外の信号に基づいて判定してもよい。
【0060】
車両が目的地に到着するまで、S302の判定はNOとなり、S300の処理が繰り返し実施され、車両の走行に伴って収集された走行軌跡が耐久記憶媒体に記憶される。
【0061】
そして、車両が目的地に到着すると、S302の判定はYESとなり、次に、走行軌跡を表示する(S304)。図10(a)に、走行軌跡が表示された表示画面の表示例を示す。図に示すように、走行軌跡A〜Eが選択経路区間として地図上に表示される。
【0062】
次に、走行軌跡を修正するか否かを判定する(S306)。具体的には、「走行軌跡を修正しますか」といったメッセージとともに乗員に「はい」と「いいえ」のいずれかを選択させる画面を表示させる。
【0063】
ここで、乗員が「はい」を選択操作すると、S306の判定はYESとなり、次に、走行軌跡を修正する(S308)。具体的には、表示された走行軌跡の修正画面を表示させ、この修正画面に従って乗員に地図表示画面上の区間を区間単位で選択操作させることにより表示させた計画区間の走行開始地点および走行終了地点の少なくとも一方を修正させ、S310へ進む。
【0064】
また、乗員が「いいえ」を選択操作すると、S306の判定はNOとなり、案内経路を修正することなく、S310へ進む。
【0065】
S310では、選択経路区間として表示された案内経路を計画区間に設定するか否かを判定する。具体的には、図10(b)に示すような確認画面を表示部に表示させ、選択経路区間を計画区間に設定するか否かを判定する。
【0066】
ここで、乗員の操作により、確認画面に表示された「はい」が選択操作されると、S210の判定はYESとなり、選択経路区間を計画区間として耐久記憶媒体に記憶させるとともに(S312)、図10(c)に示すような確認画面を表示部に表示させる。このようにして、耐久記憶媒体には、図11に示すような、登録日時、出発地(出発地座標)、経路ID、目的地(目的地座標)が記憶される。
【0067】
なお、S308にて走行軌跡が修正され、例えば、走行軌跡A〜Eが、図12に示すような走行軌跡B〜Dに変更された場合には、走行軌跡B〜Dが計画区間として耐久記憶媒体に記憶される。
【0068】
上記したように、計画区間記憶処理1〜3により、走行計画の計画区間を耐久記憶媒体に記憶させることが可能となっている。
【0069】
次に、図13に従って、走行計画作成処理について説明する。メニュー画面に従って、乗員により走行計画作成処理の開始が指示されると、ナビゲーションECU20は、図13に示す処理を実施する。なお、この走行計画作成処理を開始する前に、計画区間記憶処理1〜3のいずれかにより走行計画の計画区間が耐久記憶媒体に記憶されているものとする。
【0070】
まず、目的地の設定を行う(S400)。ここでは、図5のS200と同様に、目的地検索画面等の目的地を設定するための画面を表示部に表示させ、ユーザ操作に応じて目的地検索処理等を実施し、乗員の操作により目的地として特定された施設、地点等を目的地として設定する。
【0071】
次に、経路探索を実施する(S402)。ここでは、図5のS202と同様に、出発地から目的地に至る最適経路を案内経路として探索する。
【0072】
次に、案内経路が計画区間として登録済みであるか否かを判定する(S404)。具体的には、探索された案内経路と同じ区間が計画区間として耐久記憶媒体に記憶されているか否かに基づいて案内経路が計画区間として登録済みであるか否かを判定する。
【0073】
ここで、案内経路と同じ区間が計画区間として耐久記憶媒体に記憶されている場合、S404の判定はYESとなり、S406へ進む。
【0074】
また、案内経路と同じ区間が計画区間として耐久記憶媒体に記憶されていない場合、S404の判定はNOとなり、次に、計画区間記憶処理を実施する(S405)。この計画区間記憶処理は、図4におけるS204〜S212と同様である。すなわち、S402にて探索された案内経路について図4におけるS204〜S212と同様の処理を実施し、S406へ進む。
【0075】
S406では、耐久記憶媒体に記憶されている計画区間を乗員に提示する。具体的には、現在位置が自車の現在位置と一致する計画区間を耐久記憶媒体に記憶されている案内経路から抽出して表示部に表示させる。このように、耐久記憶媒体に記憶されている案内経路の一部を抽出して表示するようにしてもよく、また、耐久記憶媒体に記憶されている全ての案内経路を表示部に表示させるようにしてもよい。図14(a)に、複数の計画区間が表示された場合の表示例を示す。本実施形態では、図に示すように、計画区間を一覧形式で選択可能に表示部に表示させる。
【0076】
次に、計画区間を走行するか否かを判定する(S408)。具体的には、乗員により特定の計画区間が選択されると、図14(b)に示すようなその選択経路区間が走行予定経路として走行するか否かを確認する確認画面を表示させ、乗員が計画区間を走行するか否かを判定する。すなわち、表示部に表示された計画区間に、乗員が意図する走行予定区間と一致するものが存在するか否かを判定する。
【0077】
ここで、乗員が「はい」を選択操作すると、S408の判定はYESとなり、走行計画作成処理(S500)へ進む。この場合、走行計画作成処理では、選択された計画区間を対象として走行計画を作成する。
【0078】
また、乗員が「いいえ」を選択操作すると、S408の判定はNOとなり、提示された計画区間を修正する(S412)。具体的には、ユーザに特定の計画区間を選択させた後、選択された計画区間の修正画面を表示させる。そして、この修正画面に従って乗員に地図表示画面上の区間を区間単位で選択操作させ、表示した計画区間の走行開始地点および走行終了地点の少なくとも一方を修正させ、S500へ進む。この場合、走行計画作成処理では、修正された計画区間を対象として走行計画を作成する。
【0079】
図15に、走行計画作成処理(S500)のフローチャートを示す。この走行計画作成処理では、まず、計画立案を行う(S502)。具体的には、まず、計画区間を走行するのに必要なエネルギーを、耐久記憶媒体に記憶された走行情報に基づいて算出する。そして、耐久記憶媒体に記憶された走行情報から道路識別子毎に走行方法を決定する。具体的には、HV制御部10より基準SOCを取得し、この基準SOCと出発地から目的地に到着するまでの走行に伴って耐久記憶媒体に記憶された走行情報とに基づいて、出発地から目的地までの計画区間において、発電効率およびアシスト効率を算出してエンジン走行を行うかまたはアシスト走行を行うかの選択、内燃充電を行うか否かの選択、および、回生充電を行うか否かの選択といった制御方法を道路識別子毎に決定する。そして、耐久記憶媒体に記憶された走行情報に基づいて全区間のSOC管理計画(走行計画に相当する)を作成する。SOC管理計画は、目的地までの計画SOC(制御目標値)の推移を予想したものである。なお、このようなSOC管理計画を作成する手法は周知(特開2001−183150号公報、「新エネルギー自動車の開発123〜124頁」CMC出版等参照)である。
【0080】
次に、計画したSOC管理計画を耐久記憶媒体に記憶させ(S502)、図15および図13に示した各処理を終了する。
【0081】
このようにして、乗員の操作に応じて特定された走行予定区間を計画区間とした走行計画が作成され、耐久記憶媒体に記憶される。
【0082】
次に、図16に従って、報知処理について説明する。この報知処理は、後述するHV制御処理と並行して繰り返し実施される。
【0083】
まず、車両が計画区間外から計画区間内へ進入したか否かを判定する(S600)。具体的には、前回の判定結果と今回の判定結果を比較して車両の現在位置が計画区間外から計画区間内に位置するようになったか否かを判定する。
【0084】
ここで、車両の現在位置が計画区間外から計画区間内に位置するようになると、S600の判定はYESとなり、進入の通知を行う(S602)。具体的には、図17(a)に示すような表示画面を表示させ、乗員に計画区間に進入したことを報知する。
【0085】
また、車両の現在位置が継続して計画区間内に位置する場合、あるいは車両の現在位置が継続して計画区間外に位置する場合等、車両の現在位置が計画区間外から計画区間内に位置するようになっていない場合、S602の判定はNOとなり、S602の報知を行うことなく、S604へ進む。
【0086】
S604では、車両が計画区間内から計画区間外へ退出したか否かを判定する(S604)。具体的には、前回の判定結果と今回の判定結果を比較して車両の現在位置が計画区間内から計画区間外に位置するようになったか否かを判定する。
【0087】
ここで、車両の現在位置が計画区間内から計画区間外に位置するようになると、S604の判定はYESとなり、退出の通知を行う(S606)。具体的には、図17(b)に示すような表示画面を表示させ、乗員に計画区間から退出したことを報知する。
【0088】
また、車両の現在位置が継続して計画区間内に位置する場合、あるいは車両の現在位置が継続して計画区間外に位置する場合等、車両の現在位置が計画区間内から計画区間外に位置するようになっていない場合、S604の判定はNOとなり、S606の報知を行うことなく、本処理を終了する。
【0089】
次に、図18に従って、HV制御処理について説明する。走行計画を作成し、この走行計画を耐久記憶媒体に記憶すると、ナビゲーションECU20は、図18に示す処理を実施する。
【0090】
まず、計画制御を実施するか否かを判定する(S700)。具体的には、作成した走行計画を表示部に表示させ、乗員に走行計画に従った駆動制御を実施するか否かを確認する。
【0091】
ここで、乗員の操作により走行計画に従った駆動制御を実施しないことが確認された場合、S700の判定はNOとなり、本処理を終了する。
【0092】
また、乗員の操作により走行計画に従った駆動制御を実施することが確認された場合、S700の判定はYESとなり、耐久記憶媒体から走行計画を読出し(S702)、次に、制御情報の送出を行う(S704)。具体的には、HV制御部10より通知される現在SOCと、SOC管理計画に含まれる現在位置における計画SOCに基づいて、ハイブリッド車両のバッテリ9の充電量を、現在位置における計画SOCに近づけるような指令(制御情報)をHV制御部10へ送出する。
【0093】
次に、計画SOCと現在SOCとの乖離幅が予め定められた閾値よりも大きいか否かに基づいて走行計画の再計画が必要か否かを判定する(S706)。
【0094】
ここで、計画SOCと現在SOCとの乖離幅が予め定められた閾値未満の場合、S706の判定はNOとなり、次に、計画区間を離脱したか否かを判定する(S708)。具体的には、車両の現在位置が計画区間上に位置するか否かに基づいて計画区間を離脱したか否かを判定する。
【0095】
ここで、車両の現在位置が計画区間上に位置する場合、S708の判定はNOとなり、次に、目的地に到着したか否かを判定する(S712)。
【0096】
ここで、車両が目的地に到着するまで、S712の判定はNOとなり、SS704へ戻り、上記処理が繰り返し実施される。
【0097】
また、計画SOCと現在SOCとの乖離幅が予め定められた閾値よりも大きい場合、S706の判定はYESとなり、図示してないが、図15に示した走行計画作成処理(S500)を再度実施し、S702へ戻る。この走行計画作成処理の再実施により、新たな走行計画が作成され、この走行計画に従った駆動制御が行われるようになる。
【0098】
また、車両の現在位置が計画区間上に位置するか否かに基づいて計画区間を離脱したと判定された場合、S708の判定はYESとなり、走行計画に従った駆動制御を中止するとともに、走行計画に従った駆動制御を中止する旨を表示部に表示させ(S710)、本処理を終了する。なお、本実施形態では、図19に示すような、「計画区間からはずれました 計画制御を中止します」といったメッセージを含む表示画面が表示部に表示される。
【0099】
また、車両が目的地に到着すると、S712の判定はYESとなり、本処理を終了する。
【0100】
上記した構成によれば、走行計画の計画区間を特定し、当該計画区間を耐久記憶媒体に記憶させ、耐久記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させ、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画が作成される。すなわち、乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成することができる。
【0101】
また、提示した計画区間に走行予定経路と一致するものが含まれるか否かを乗員に確認し、提示した計画区間に走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って走行予定経路と一致する計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って容易に走行予定経路を特定することができる。
【0102】
また、提示した計画区間に走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って提示された計画区間の修正が可能となっており、乗員の操作に従って修正された計画区間が走行予定経路として特定される。すなわち、乗員は提示された内容に従って計画区間を容易に修正し、走行予定経路として特定することができる。
【0103】
また、地図表示画面に従って乗員に計画区間を指定させ、乗員により指定された計画区間を走行計画の計画区間として特定するか否かを乗員に確認し、指定された計画区間を走行計画の計画区間として特定することが確認された場合、指定された計画区間が走行計画の計画区間として特定される。すなわち、乗員は地図表示画面に従って任意の区間を計画区間として指定し、この指定した計画区間を走行計画の計画区間として特定することができる。
【0104】
また、乗員の操作に応じて出発地から目的地に至る案内経路を探索し、この探索された案内経路を走行計画の計画区間として特定するか否かを乗員に確認し、探索された案内経路を走行計画の計画区間として特定することが確認された場合、探索された案内経路を走行計画の計画区間として特定することができる。
【0105】
また、探索された案内経路を修正するか否かを乗員に確認し、案内経路を修正することが確認された場合、乗員の操作に従って案内経路の修正が可能となっており、修正された案内経路が走行計画の計画区間として特定される。すなわち、乗員は探索された案内経路を修正し、修正した案内経路を走行計画の計画区間として特定することができる。
【0106】
また、車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を走行計画の計画区間として特定するか否かを乗員に確認し、収集された走行軌跡を走行計画の計画区間として特定することが確認された場合、収集された走行軌跡を走行計画の計画区間として特定することができる。
【0107】
また、記憶媒体に記憶された走行軌跡を修正するか否かを乗員に確認し、走行軌跡を修正することが確認された場合、乗員の操作に従って走行軌跡の修正が可能となっており、修正された走行軌跡が走行計画の計画区間として特定される。すなわち、乗員は走行軌跡を修正し、修正した走行軌跡を走行計画の計画区間として特定することができる。
【0108】
また、車両が計画区間内から計画区間外へ退出したか否かを判定し、車両が計画区間内から計画区間外へ退出したと判定された場合、車両が計画区間から退出したことが乗員に報知されるので、乗員は車両が計画区間から退出したことを容易に認識することができる。
【0109】
また、車両が計画区間外から計画区間内へ進入したか否かを判定し、車両が計画区間外から計画区間内へ進入したと判定された場合、車両が計画区間へ進入したことが乗員に報知されるので、乗員は車両が計画区間へ進入したことを容易に認識することができる。
【0110】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0111】
例えば、上記実施形態では、S708にて計画区間を離脱したと判定された場合、走行計画に従った駆動制御を中止するとともに、S710にて走行計画に従った駆動制御を中止する旨を表示し、HV制御処理を終了したが、S708にて計画区間を離脱したと判定された場合、走行計画に従った駆動制御を中止するとともに、S710にて走行計画に従った駆動制御を中止する旨を表示させた後、図13に示した走行計画作成処理を実施するようにしてもよい。
【0112】
また、上記実施形態では、S400、S402にて、目的地設定および経路探索を実施し、S404にて、探索された案内経路が計画区間として登録済みであるか否かを判定し、探索された案内経路が計画区間として登録済みであると判定された場合、探索された案内経路を乗員に提示して、乗員に意図する走行予定経路を特定させる構成を示したが、目的地設定、経路探索等を実施することなく、耐久記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させるようにしてもよい。
【0113】
また、上記実施形態では、図14(a)に示したように、計画区間を一覧形式で選択可能に表示部に表示させたが、計画区間を地図形式で表示するようにしてもよい。また、計画区間を一覧形式と地図形式の両方を用いて表示するようにしてもよい。
【0114】
また、上記実施形態では、S208にて、案内経路を修正する際に、表示した案内経路の出発地および目的地の少なくとも一方を乗員に修正させ、S210にて、修正された案内経路を計画区間に設定するか否かを確認する構成を示したが、例えば、S208にて、表示した案内経路を複数の計画区間に分割するように乗員に修正させ、S210にて、分割された計画区間のうち乗員により選択された特定の計画区間を計画区間に設定するか否かを確認するようにしてもよい。
【0115】
また、上記実施形態では、S308にて、走行軌跡を修正する際に、表示した走行軌跡の走行開始地点および走行終了地点の少なくとも一方を乗員に修正させ、S310にて、修正された走行軌跡を計画区間に設定するか否かを確認する構成を示したが、例えば、S308にて、表示した走行軌跡を複数の計画区間に分割するように乗員に修正させ、S310にて、分割された計画区間のうち乗員により選択された特定の計画区間を計画区間に設定するか否かを確認するようにしてもよい。
【0116】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、計画区間記憶処理1(S100〜S104)、計画区間記憶処理2(S200〜S212)および計画区間記憶処理3(S300〜S312)が計画区間記憶手段に相当し、S400〜S412が走行予定経路特定手段に相当し、S500が走行計画作成手段に相当し、S408が確認手段に相当し、S412が計画区間修正手段に相当し、S100が計画区間指定手段に相当し、S102が第1の計画区間特定確認手段に相当し、S202が経路探索手段に相当し、S210が第2の計画区間特定確認手段に相当し、S206が案内経路修正確認手段に相当し、S208が案内経路修正手段に相当し、S310が第3の計画区間特定確認手段に相当し、S306が走行軌跡修正確認手段に相当し、S308が走行軌跡修正手段に相当し、S604が退出判定手段に相当し、S606が退出報知手段に相当し、S600が進入判定手段に相当し、S602が進入報知手段に相当する。
【図面の簡単な説明】
【0117】
【図1】本発明の一実施形態に係るハイブリッド車両の駆動制御装置の概略構成を示す図である。
【図2】計画区間記憶処理1のフローチャートである。
【図3】(a)〜(c)は計画区間記憶処理1における表示画面の表示例を示す図である。
【図4】耐久記憶媒体に記憶される選択経路区間について説明するための図である。
【図5】計画区間記憶処理2のフローチャートである。
【図6】(a)〜(c)は計画区間記憶処理2における表示画面の表示例を示す図である。
【図7】耐久記憶媒体に記憶される選択経路区間について説明するための図である。
【図8】計画区間記憶処理2について説明するための図である。
【図9】計画区間記憶処理3のフローチャートである。
【図10】(a)〜(c)は計画区間記憶処理3における表示画面の表示例を示す図である。
【図11】耐久記憶媒体に記憶される選択経路区間について説明するための図である。
【図12】計画区間記憶処理3について説明するための図である。
【図13】走行計画作成処理のフローチャートである。
【図14】(a)、(b)は、計画区間記憶処理3における表示画面の表示例を示す図である。
【図15】走行計画作成処理のフローチャートである。
【図16】報知処理のフローチャートである。
【図17】(a)、(b)は、報知処理における表示画面の表示例を示す図である。
【図18】HV制御処理のフローチャートである。
【図19】HV制御処理における表示画面の表示例を示す図である。
【符号の説明】
【0118】
1 エンジン
2 発電機
3 モータ
4 差動装置
5a タイヤ
5b タイヤ
6 インバータ
7 DCリンク
8 インバータ
9 バッテリ
10 HV制御部
11 GPS受信機
12 方位センサ
13 車速センサ
14 地図DB記憶部
20 ナビゲーションECU
【特許請求の範囲】
【請求項1】
内燃機関とモータを走行用の動力源として走行するハイブリッド車両に搭載され、計画された走行計画に従って前記内燃機関と前記モータの駆動制御を行うハイブリッド車両の走行計画作成装置であって、
前記走行計画の計画区間を特定し、当該計画区間を記憶媒体に記憶させる計画区間記憶手段と、
前記記憶媒体に記憶された前記計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させる走行予定経路特定手段と、
乗員の操作に応じて特定された前記走行予定経路を前記計画区間とした走行計画を作成する走行計画作成手段と、を備えたことを特徴とする走行計画作成装置。
【請求項2】
前記走行予定経路特定手段は、前記提示した計画区間に前記走行予定経路と一致するものが含まれるか否かを乗員に確認する確認手段を備え、
前記確認手段により前記提示した計画区間に前記走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って前記走行予定経路と一致する前記計画区間を前記走行予定経路として特定することを特徴とする請求項1に記載の走行計画作成装置。
【請求項3】
前記走行予定経路特定手段は、前記確認手段により前記提示した計画区間に前記走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って、前記提示された計画区間を修正する計画区間修正手段を備え、
前記乗員の操作に従って修正された計画区間を前記走行予定経路として特定することを特徴とする請求項2に記載の走行計画作成装置。
【請求項4】
前記計画区間記憶手段は、地図表示画面に従って乗員に前記計画区間を指定させる計画区間指定手段と、
乗員により指定された前記計画区間を前記走行計画の計画区間として特定するか否かを乗員に確認する第1の計画区間特定確認手段と、を備え、
前記計画区間記憶手段は、前記第1の計画区間特定確認手段により前記指定された計画区間を前記走行計画の計画区間として特定することが確認された場合、前記指定された計画区間を前記走行計画の計画区間として特定することを特徴とする請求項1ないし3のいずれか1つに記載の走行計画作成装置。
【請求項5】
乗員の操作に応じて出発地から目的地に至る案内経路を探索する経路探索手段と、
前記経路探索手段により探索された前記案内経路を前記走行計画の計画区間として特定するか否かを乗員に確認する第2の計画区間特定確認手段と、を備え、
前記計画区間記憶手段は、前記第2の計画区間特定確認手段により前記探索された案内経路を前記走行計画の計画区間として特定することが確認された場合、前記探索された案内経路を前記走行計画の計画区間として特定することを特徴とする請求項1ないし3のいずれか1つに記載の走行計画作成装置。
【請求項6】
前記経路探索手段により探索された前記案内経路を修正するか否かを乗員に確認する案内経路修正確認手段と、
前記案内経路修正確認手段により前記案内経路を修正することが確認された場合、乗員の操作に従って、前記案内経路を修正する案内経路修正手段と、を備え、
前記計画区間記憶手段は、前記案内経路修正手段により修正された案内経路を前記走行計画の計画区間として特定することを特徴とする請求項5に記載の走行計画作成装置。
【請求項7】
前記車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を前記走行計画の計画区間として特定するか否かを乗員に確認する第3の計画区間特定確認手段と、を備え、
前記計画区間記憶手段は、前記第3の計画区間特定確認手段により前記収集された走行軌跡を前記走行計画の計画区間として特定することが確認された場合、前記収集された走行軌跡を前記走行計画の計画区間として特定することを特徴とする請求項1ないし3のいずれか1つに記載の走行計画作成装置。
【請求項8】
前記記憶媒体に記憶された前記走行軌跡を修正するか否かを乗員に確認する走行軌跡修正確認手段と、
前記走行軌跡修正確認手段により前記走行軌跡を修正することが確認された場合、乗員の操作に従って前記走行軌跡を修正する走行軌跡修正手段と、を備え、
前記計画区間記憶手段は、前記走行軌跡修正手段により修正された走行軌跡を前記走行計画の計画区間として特定することを特徴とする請求項7に記載の走行計画作成装置。
【請求項9】
前記車両が前記計画区間内から前記計画区間外へ退出したか否かを判定する退出判定手段と、
前記退出判定手段により前記車両が前記計画区間内から前記計画区間外へ退出したと判定された場合、前記車両が前記計画区間から退出したことを乗員に報知する退出報知手段と、を備えたことを特徴とする請求項1ないし8のいずれか1つに記載の走行計画作成装置。
【請求項10】
前記車両が前記計画区間外から前記計画区間内へ進入したか否かを判定する進入判定手段と、
前記進入判定手段により前記車両が前記計画区間外から前記計画区間内へ進入したと判定された場合、前記車両が前記計画区間へ進入したことを乗員に報知する進入報知手段と、を備えたことを特徴とする請求項1ないし9のいずれか1つに記載の走行計画作成装置。
【請求項1】
内燃機関とモータを走行用の動力源として走行するハイブリッド車両に搭載され、計画された走行計画に従って前記内燃機関と前記モータの駆動制御を行うハイブリッド車両の走行計画作成装置であって、
前記走行計画の計画区間を特定し、当該計画区間を記憶媒体に記憶させる計画区間記憶手段と、
前記記憶媒体に記憶された前記計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させる走行予定経路特定手段と、
乗員の操作に応じて特定された前記走行予定経路を前記計画区間とした走行計画を作成する走行計画作成手段と、を備えたことを特徴とする走行計画作成装置。
【請求項2】
前記走行予定経路特定手段は、前記提示した計画区間に前記走行予定経路と一致するものが含まれるか否かを乗員に確認する確認手段を備え、
前記確認手段により前記提示した計画区間に前記走行予定経路と一致するものが含まれることが確認された場合、乗員の操作に従って前記走行予定経路と一致する前記計画区間を前記走行予定経路として特定することを特徴とする請求項1に記載の走行計画作成装置。
【請求項3】
前記走行予定経路特定手段は、前記確認手段により前記提示した計画区間に前記走行予定経路と一致するものが含まれないことが確認された場合、乗員の操作に従って、前記提示された計画区間を修正する計画区間修正手段を備え、
前記乗員の操作に従って修正された計画区間を前記走行予定経路として特定することを特徴とする請求項2に記載の走行計画作成装置。
【請求項4】
前記計画区間記憶手段は、地図表示画面に従って乗員に前記計画区間を指定させる計画区間指定手段と、
乗員により指定された前記計画区間を前記走行計画の計画区間として特定するか否かを乗員に確認する第1の計画区間特定確認手段と、を備え、
前記計画区間記憶手段は、前記第1の計画区間特定確認手段により前記指定された計画区間を前記走行計画の計画区間として特定することが確認された場合、前記指定された計画区間を前記走行計画の計画区間として特定することを特徴とする請求項1ないし3のいずれか1つに記載の走行計画作成装置。
【請求項5】
乗員の操作に応じて出発地から目的地に至る案内経路を探索する経路探索手段と、
前記経路探索手段により探索された前記案内経路を前記走行計画の計画区間として特定するか否かを乗員に確認する第2の計画区間特定確認手段と、を備え、
前記計画区間記憶手段は、前記第2の計画区間特定確認手段により前記探索された案内経路を前記走行計画の計画区間として特定することが確認された場合、前記探索された案内経路を前記走行計画の計画区間として特定することを特徴とする請求項1ないし3のいずれか1つに記載の走行計画作成装置。
【請求項6】
前記経路探索手段により探索された前記案内経路を修正するか否かを乗員に確認する案内経路修正確認手段と、
前記案内経路修正確認手段により前記案内経路を修正することが確認された場合、乗員の操作に従って、前記案内経路を修正する案内経路修正手段と、を備え、
前記計画区間記憶手段は、前記案内経路修正手段により修正された案内経路を前記走行計画の計画区間として特定することを特徴とする請求項5に記載の走行計画作成装置。
【請求項7】
前記車両の走行に伴って走行軌跡を収集し、当該収集した走行軌跡を前記走行計画の計画区間として特定するか否かを乗員に確認する第3の計画区間特定確認手段と、を備え、
前記計画区間記憶手段は、前記第3の計画区間特定確認手段により前記収集された走行軌跡を前記走行計画の計画区間として特定することが確認された場合、前記収集された走行軌跡を前記走行計画の計画区間として特定することを特徴とする請求項1ないし3のいずれか1つに記載の走行計画作成装置。
【請求項8】
前記記憶媒体に記憶された前記走行軌跡を修正するか否かを乗員に確認する走行軌跡修正確認手段と、
前記走行軌跡修正確認手段により前記走行軌跡を修正することが確認された場合、乗員の操作に従って前記走行軌跡を修正する走行軌跡修正手段と、を備え、
前記計画区間記憶手段は、前記走行軌跡修正手段により修正された走行軌跡を前記走行計画の計画区間として特定することを特徴とする請求項7に記載の走行計画作成装置。
【請求項9】
前記車両が前記計画区間内から前記計画区間外へ退出したか否かを判定する退出判定手段と、
前記退出判定手段により前記車両が前記計画区間内から前記計画区間外へ退出したと判定された場合、前記車両が前記計画区間から退出したことを乗員に報知する退出報知手段と、を備えたことを特徴とする請求項1ないし8のいずれか1つに記載の走行計画作成装置。
【請求項10】
前記車両が前記計画区間外から前記計画区間内へ進入したか否かを判定する進入判定手段と、
前記進入判定手段により前記車両が前記計画区間外から前記計画区間内へ進入したと判定された場合、前記車両が前記計画区間へ進入したことを乗員に報知する進入報知手段と、を備えたことを特徴とする請求項1ないし9のいずれか1つに記載の走行計画作成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2010−139361(P2010−139361A)
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願番号】特願2008−315598(P2008−315598)
【出願日】平成20年12月11日(2008.12.11)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願日】平成20年12月11日(2008.12.11)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]