
走行記録装置、走行料金提示方法及び走行記録システム
【課題】目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる走行記録装置を提供する。
【解決手段】タクシメータ10は、タクシの現在位置が目的地付近になると、走行距離および走行中の停車時間に基づく算出規則から、走行中の停車時間のみに基づく算出規則に変更する(S3)。タクシメータ10は、降車前に行われる操作として、シフトレバー25の位置が駐車時の「P」の位置になると、タクシメータ10は、メータ状態を“賃走”から“支払”に遷移させ、表示器15の画面上の「賃走」を消灯し、「支払」を点灯させる。タクシメータ10は、確定した運賃(タクシ走行料金)の金額データをナビゲーション装置50に送信する(S6)。これにより、タクシメータ10の表示器15およびナビゲーション装置50のタッチパネル表示器54の双方にタクシ走行料金が表示される。
【解決手段】タクシメータ10は、タクシの現在位置が目的地付近になると、走行距離および走行中の停車時間に基づく算出規則から、走行中の停車時間のみに基づく算出規則に変更する(S3)。タクシメータ10は、降車前に行われる操作として、シフトレバー25の位置が駐車時の「P」の位置になると、タクシメータ10は、メータ状態を“賃走”から“支払”に遷移させ、表示器15の画面上の「賃走」を消灯し、「支払」を点灯させる。タクシメータ10は、確定した運賃(タクシ走行料金)の金額データをナビゲーション装置50に送信する(S6)。これにより、タクシメータ10の表示器15およびナビゲーション装置50のタッチパネル表示器54の双方にタクシ走行料金が表示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行中、走行料金を算出する走行記録装置、走行料金提示方法及び走行記録システムに関する。
【背景技術】
【0002】
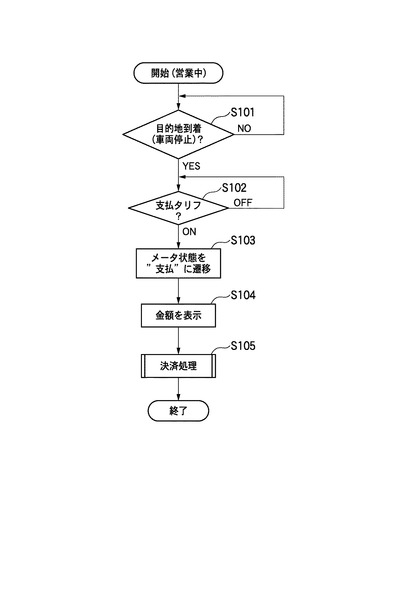
従来、タクシが目的地に到着すると、タクシメータは、つぎのような動作を行っていた。図8は従来のタクシメータの動作手順を示すフローチャートである。タクシメータは、タクシが目的地に到着するまで待ち(ステップS101)、目的地に到着すると、支払いタリフのボタンが押下されるまで待つ(ステップS102)。
【0003】
支払いタリフのボタンが押下されると、タクシメータは、メータ状態を「支払」に遷移させ(ステップS103)、さらに、その表示部にタクシ走行料金の金額を表示する(ステップS104)。この後、タクシメータは、タクシ走行料金の精算の確認、領収書発行などの決済処理を行い(ステップS105)、本処理を終える。
【0004】
また、この種の従来技術として、特許文献1には、タクシ車載装置から通知される出発地点および目的地点と実績情報とに基づいて、所要時間、距離、タクシ料金を予測し、この予測されたタクシ料金をタクシ車載装置に通知することが示されている。
【0005】
同様に、特許文献2においても、GPSから現在位置のデータを得て、入力された目的地までの経路をもとに、時間距離併用運賃制による予測タクシ料金を算出し、利用者に提示することが示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−115061号公報
【特許文献2】特開2007−334472号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来の特許文献1、2に記載されたタクシメータでは、出発地点から目的地点までのタクシ料金を事前に予測するものであり、実際にタクシが目的地に到着してから、タクシ料金を提示するものとは異なる。このため、予測されたタクシ料金と実際に要したタクシ料金とが違ってくることが予想された。
【0008】
また、図8に示した動作を行う、上記従来のタクシメータでは、タクシが目的地付近に到達し、賃走を終了して決済処理に移行させるためには、運転手が支払いタリフのボタンを押下しなければならず、操作に手間取ったりした。また、ボタンを押下した地点と乗客が降車する目的地点とは必ずしも一致しないことがあった。
【0009】
また、支払いタリフのボタン押下によって支払い料金が確定してしまうので、その後、乗客の指示等によって短い距離を走行(例えば、10〜30m)しても、あるいは信号待ち等によって待ち時間が発生しても、支払い料金に加算されることはなく、タクシ走行料金が正確に算出されないことがあった。
【0010】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる走行記録装置、走行料金提示方法及び走行記録システムを提供することにある。
【課題を解決するための手段】
【0011】
前述した目的を達成するために、本発明に係る走行記録装置は、下記(1)〜(8)を特徴としている。
(1) 車両の走行中、走行料金を算出する走行記録装置であって、
前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたこと。
(2) 上記(1)記載の走行記録装置であって、
前記走行記録装置が走行料金を算出する状態から走行料金の算出を停止する状態に装置状態を切り替える切替手段を備え、
前記提示手段は、前記切替手段によって切り替えられた装置状態および前記走行料金を提示する
こと。
(3) 上記(2)記載の走行記録装置であって、
前記提示手段は、前記装置状態および前記走行料金を表示する画面を有し、前記装置状態の切り替えと同時に、前記走行料金を拡大して表示する
こと。
(4) 上記(1)〜(3)のいずれか一つに記載の走行記録装置であって、
前記変更手段は、前記目的地付近に到達する前、走行距離および走行中の停車時間に基づく算出規則から、前記目的地付近に到達した後、走行中の停車時間のみに基づく算出規則に切り替える
こと。
(5) 上記(1)〜(4)のいずれか一つに記載の走行記録装置であって、
前記検知手段は、前記車両のシフトレバーの位置を検知するレバー位置センサを有し、前記降車前に行われる操作として、前記シフトレバーの位置が駐車時の位置になったことを検知する
こと。
(6) 上記(1)〜(4)のいずれか一つに記載の走行記録装置であって、
前記検知手段は、前記車両のドアの開操作を検知するドア開センサを有し、前記降車前に行われる操作として、前記ドアの開操作を検知する
こと。
(7) 上記(1)〜(6)のいずれか一つに記載の走行記録装置であって、
前記目的地取得手段は、前記車両を目的地に案内するナビゲーション装置から、当該ナビゲーション装置に登録された前記目的地を取得する
こと。
(8) 上記(1)〜(7)のいずれか一つに記載の走行記録装置であって、
前記位置取得手段は、GPS装置から前記車両の現在位置の座標を表す信号を受信する
こと。
【0012】
上記(1)の構成の走行記録装置によれば、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。例えば、目的地付近に到達してから、信号待ちが発生したり、乗客の要求により待ち時間が発生したり、停止位置が10m先に延びたりしても、降車前に行われる操作が検知されない限り、課金が行われているので、走行料金が正確になる。また、車両の現在位置を高精度に検出する必要がなく、位置を検出する装置(例えば、GPS受信器)を安価なもので済ますことができる。
上記(2)の構成の走行記録装置によれば、切り替えられた装置状態が提示されるので、走行料金の算出が停止された後の最終的な走行料金がわかる。
上記(3)の構成の走行記録装置によれば、走行料金が見やすくなる。
上記(4)の構成の走行記録装置によれば、目的地付近に到達してから、信号待ちや乗客の要求により待ち時間が発生しても、正確な走行料金が算出される。
上記(5)の構成の走行記録装置によれば、降車前に行われる操作を簡単に検知することができる。また、降車位置が10m先に延びたりしても、シフトレバーの位置が駐車時の位置にならない限り、課金が行われるので、走行料金が正確になる。
上記(6)の構成の走行記録装置によれば、降車前に行われる操作を簡単に検知することができる。また、ドアが開かれないと、降車が行われないので、確実に走行料金を提示することができる。
上記(7)の構成の走行記録装置によれば、ナビゲーション装置とは別に、目的地を入力する操作が不要となる。
上記(8)の構成の走行記録装置によれば、車両の現在位置を高精度に検出する必要がなく、安価なGPS受信器で実現することができる。
【0013】
前述した目的を達成するために、本発明に係る走行料金提示方法は、下記(9)を特徴としている。
(9) 車両の走行中、走行記録装置が走行料金を算出して提示する走行料金提示方法であって、
前記車両が走行する目的地を取得する目的地取得ステップと、
前記車両の現在位置を取得する位置取得ステップと、
前記位置取得ステップで取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別ステップと、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更ステップと、
降車前に行われる操作を検知する検知ステップと、
前記変更ステップで算出規則が変更され、かつ、前記検知ステップで降車前に行われる操作が検知された場合、走行料金を提示する提示ステップと
を有すること。
【0014】
上記(9)の構成の走行料金提示方法によれば、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。
【0015】
前述した目的を達成するために、本発明に係る走行記録システムは、下記(10)を特徴としている。
(10) 車両の走行中、走行料金を算出する走行記録装置および前記車両を目的地に案内するナビゲーション装置を備えた走行記録システムであって、
前記ナビゲーション装置に登録された、前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたこと。
【0016】
上記(10)の構成の走行記録システムによれば、これにより、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。
【発明の効果】
【0017】
本発明の走行記録装置、走行料金提示方法及び走行記録システムによれば、車両が目的地付近に到達して、算出規則が変更され、かつ、降車前に行われる操作が検知された場合、走行料金を提示するので、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。
【図面の簡単な説明】
【0018】
【図1】実施形態における走行記録システムの構成を示すブロック図である。
【図2】タクシメータ10の外観を示す正面図である。
【図3】ナビゲーション装置50の外観を示す正面図である。
【図4】シフトレバー25およびレバー位置センサ37の配置を示す図である。
【図5】タクシメータ10の動作手順を示すフローチャートである。
【図6】タクシメータ10およびナビゲーション装置50の表示画面を示す図であって、図6(A)〜図6(C)はそれぞれその表示画面の一例を示す図である。
【図7】ナビゲーション装置50の動作手順を示すフローチャートである。
【図8】従来のタクシメータの動作手順を示すフローチャートである。
【発明を実施するための形態】
【0019】
本発明の実施形態の走行記録装置、走行料金提示方法及び走行記録システムについて図面を参照しながら説明する。本実施形態の走行記録装置は、タクシ車両に搭載されたタクシメータに適用される。また、本実施形態の走行記録システムは、ナビゲーション装置およびタクシメータから構成される。
【0020】
(第1の実施形態)
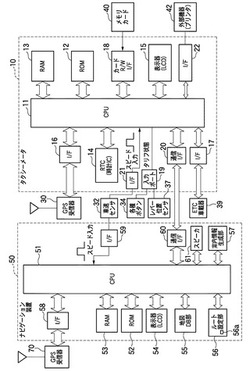
図1は実施形態における走行記録システムの構成を示すブロック図である。本実施形態の走行記録システムは、前述したように、タクシメータ10およびナビゲーション装置50から構成される。図2はタクシメータ10の外観を示す正面図である。図3はナビゲーション装置50の外観を示す正面図である。
【0021】
タクシメータ10には、CPU(Central Processing Unit)11を中心とし、このCPU11に接続されるROM(Read Only Memory)12、RAM(Random Access Memory)13、RTC14、表示器15および各種インタフェース(I/F)16、17、18、19、20、21、22が設けられている。
【0022】
CPU11は、タクシメータ全体を制御するものであり、ROM12に格納された動作プログラムを実行する。ROM12には、前述した動作プログラムが格納される他、料金の算出規則を表す数式や係数(もしくは料金表)などが格納されている。RAM13は、CPU11によるプログラムの実行に伴って一時的に使用される。また、RAM13には、走行ルート、出発地や目的地(到着地点)などが記憶される。
【0023】
RTC(Real Time Clock)14は現在時刻を計時する時計ICからなる。表示器15は、LCD(Luquid Crystal Display)からなり、走行距離、タクシ走行料金(運賃)、タリフ状態等を表示する。
【0024】
各種I/Fとして、GPS受信器30との接続を行う受信I/F16、ETC車載器39との接続を行うETCI/F17、メモリカード(ICカード)40との接続を行うカード(R/W)I/F18、車速センサ32からの信号を入力するセンサI/F21、ナビゲーション装置50に接続され、通信を行う通信I/F20、各種ボタン34の押下信号およびレバー位置センサ37の検知信号を入力する入力ポート19、および外部機器(ここでは、プリンタ)42との接続を行う出力I/F22が用いられる。
【0025】
車速センサ32は、ロータリーエンコーダからなり、走行距離演算用のパルス信号として、後輪(駆動輪)のトランスミッション回転数に応じた数のパルス信号を発生し、CPU11にスピード信号を出力する。また、各種ボタン34として、図2に示すように、空車ボタン34a、実車ボタン34b、支払ボタン34c、合計ボタン34d、迎車ボタン34e、高速ボタン34f、未収ボタン34g、書込ボタン34hなどが設けられ、CPU11に、タリフ状態(空車、賃走、割増、迎車等)を表す信号などが入力される。
【0026】
GPS(Global Positioning System)受信器30は、車両に取り付けられ、複数のGPS衛星からの電波を受信し、車両の現在位置の座標(GPS座標)を表す信号を出力する。CPU11がGPS受信器30からGPS座標を取得する手段は位置取得手段に相当する。
【0027】
ETC(Electronic Toll Collection)車載器39は、無線通信を利用して車両と料金所のシステムが必要な情報を交換し、料金の収受を行う。
【0028】
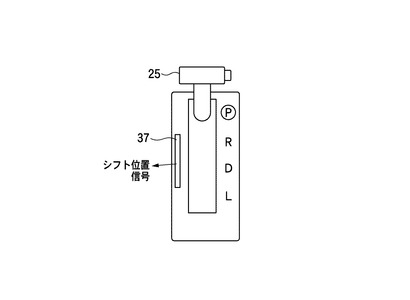
レバー位置センサ37は、トランスミッションのギアの組み合わせを変更するシフトレバー25の近傍に設けられ、シフトレバー25の位置を検知する。図4はシフトレバー25およびレバー位置センサ37の配置を示す図である。レバー位置センサ37は、シフトレバー25の位置が、駐車(パーキング)を表す「P」、後退を表す「R」、通常ドライブを表す「D」、低速ドライブを表す「L」の位置にある場合、それぞれの位置に応じてオン/オフとなるスイッチ群から構成されている。レバー位置センサ37によって検知されたシフト位置信号は入力ポート19を介してCPU11に入力される。ここでは、AT(オートマッチ)車の場合を示したが、MT(マニュアル)車においても同様である。MT車の場合、シフトレバーがニュートラルに入れられ、サイドブレーキが引かれた状態がAT車のシフトレバーの位置が「P」と同じ状態に相当するので、この場合、レバー位置センサは、シフトレバーがニュートラルであり、かつ、サイドブレーキが引かれていることを検知する。
【0029】
一方、ナビゲーション装置50は、CPU51、ROM52、RAM53、タッチパネル表示器54、地図データベース(DB)部55、ルート設定部56、案内情報生成部57、スピーカ61および各種I/F58、59、60を有する。
【0030】
各種I/Fとして、GPS受信器70との接続を行う受信I/F58、車速センサ32からの信号を入力するセンサI/F59、およびタクシメータ10に接続され、通信を行う通信I/F60が用いられる。
【0031】
CPU51は、ナビゲーション装置全体を制御するものであり、ROM52に格納された動作プログラムを実行する。CPU51は、プログラムの実行に従って、タッチパネル表示器54の表示を制御する。ROM52には、前述した動作プログラムが格納される他、各種の設定値が格納されている。RAM53は、CPU51による動作プログラムの実行に伴って使用される。
【0032】
GPS受信器70は、GPS受信器30と同様、車両に取り付けられ、複数のGPS衛星からの電波を受信する。なお、GPS受信器70は、タクシメータ10に接続されたGPS受信器30とは別体のものであってもよいし、単体として同じものであってもよい。CPU51は、GPS受信器70から送られる受信信号をもとに、車両の現在位置の座標(GPS座標)を取得する。
【0033】
タッチパネル表示器54は、液晶表示パネルおよびその前面に設けられたタッチパネルからなる。地図DB部55には、カーナビゲーションに使用される地図情報が格納されている。
【0034】
ルート設定部56は、各種ボタン56aを有し、この各種ボタン56aから、あるいはタッチパネル表示器54を通して入力された出発地および目的地(到着地)などの地点情報から走行経路を自動的に決定したり、タッチパネルをなぞった軌跡から走行経路を設定する機能を有する。出発地、目的地、走行経路等の情報は、ルート設定部56内のメモリに登録される。また、出発地および目的地の座標はRAM53にも登録されてもよい。
【0035】
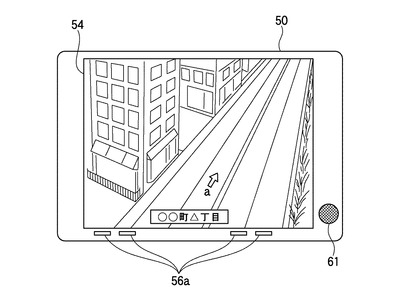
案内情報生成部57は、GPS位置情報をもとに、走行経路に沿って車両の進行を案内する情報を生成する。この案内する情報は、タッチパネル表示器54の画面の更新に用いられる画像データ、および音声ガイダンスとして使用される音声データからなる。スピーカ61はこの音声データに基づく音声を発する。図3に示すタッチパネル表示器54の画面には、立体的に表示された画像を用いて車両の進行方向が矢印aで表されるとともに、現在位置が「○○町△番地」であることが示されている。
【0036】
上記構成を有する走行記録システムの動作を示す。図5はタクシメータ10の動作手順を示すフローチャートである。この動作プログラムはROM12に格納されており、CPU11によって営業中(走行中)、所定の周期ごとに実行される。ここで、営業中、CPU11は、別の課金処理において、走行距離および走行中の停車時間に基づく算出規則に従って運賃を算出し、メータ表示部(表示器)15の画面に表示する動作を繰り返す。図6(A)〜図6(C)はタクシメータ10およびナビゲーション装置50の表示画面を示す図である。図6(A)に示すように、営業中、メータ表示部(表示器)15には、メータ状態が「賃走」であり、只今の運賃が「1020円」であることが示される。
【0037】
まず、CPU11は、ナビゲーション装置50から目的地の座標データを受信する(ステップS1)。なお、ステップS1の処理は目的地取得手段に相当する。CPU11は、GPS受信器30から受信した現在位置の座標(GPS座標)をもとに、現在位置が目的地付近になるまで待つ(ステップS2)。ここで、目的地付近とは、例えば、ナビゲーション装置50で設定された目的地から所定距離(一例として50m)の範囲内などが挙げられる。
【0038】
現在位置が目的地付近になると、CPU11は、走行距離および走行中の停車時間に基づく算出規則から、走行中の停車時間のみに基づく算出規則に変更する(ステップS3)。なお、このとき、算出規則が変更されたことを、表示器15等を用いて乗務員(運転手)に知らせるようにしてもよい。
【0039】
そして、CPU11は、レバー位置センサ37から出力される信号を読み込み、降車前に行われる操作として、シフトレバー25の位置が駐車時の「P」の位置になるまで待つ(ステップS4)。
【0040】
シフトレバー25の位置が駐車時の「P」の位置になると、CPU11は、タクシメータ10の状態(メータ状態)を“賃走”から“支払”に遷移させ、表示器15の画面上で「賃走」を消灯し、「支払」を点灯させる(ステップS5)。なお、このメータ状態の遷移は、装置状態を切り替える切替手段に相当する。また、ステップS5では、メータ状態の遷移と同時に、表示器15の画面では、運賃が拡大して表示される。具体的に、図6(B)に示すように、タクシが目的地に到着すると、タクシメータ10の表示器15の画面には、メータ状態を表す「支払」が点灯し、運賃「1360円」が拡大して表示される。これにより、乗客にとって運賃が見やすくなる。
【0041】
なお、シフトレバー25の位置が駐車時の「P」の位置になる前であっても、乗務員(運転手)は、支払いボタン34cを押下することにより、メータ状態を“支払”に強制的に遷移させてもよい。
【0042】
CPU11は、確定した運賃(タクシ走行料金)の金額データをナビゲーション装置50に送信する(ステップS6)。これにより、ナビゲーション装置50のタッチパネル表示器54にも、タクシ走行料金が表示される(図6(C)参照)。この後、CPU11は、決済処理を行い(ステップS7)、本処理を終了する。この決済処理では、例えば、乗務員が合計ボタン34dを押して合計金額を表示させ、乗客から金銭を受け取り、点灯している未収ボタン34gを押すことにより精算が行われる。そして、CPU11は本処理を終了する。
【0043】
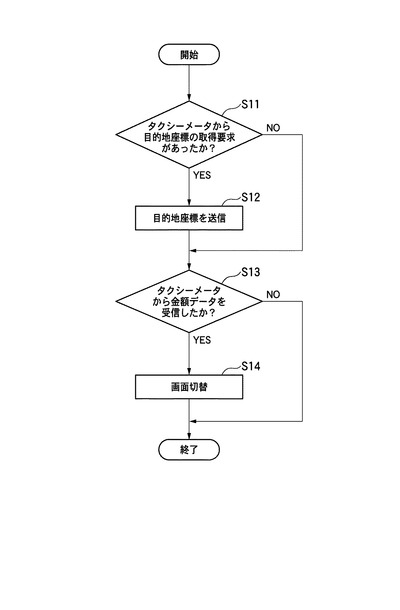
図7はナビゲーション装置50の動作手順を示すフローチャートである。この動作プログラムは、ROM52に格納されており、CPU51によって所定時間ごとに実行される。
【0044】
まず、CPU51は、タクシメータ10から、目的地座標の取得要求があったか否かを判別する(ステップS11)。取得要求がなかった場合、CPU51は、そのままステップS13の処理に進む。一方、目的地座標の取得要求があった場合、CPU51は、ルート設定部56内のメモリもしくはRAM53に登録された目的地座標を読み込み、通信I/F60を介してタクシメータ10に送信する(ステップS12)。
【0045】
CPU51は、タクシメータ10から金額データを受信したか否かを判別する(ステップS13)。金額データを受信しなかった場合、CPU51は本処理を終了する。一方、タクシメータ10から金額データを受信した場合、タッチパネル表示器54の画面を切り替え、図6(C)に示すように、タクシ料金の精算を促す表示を行う(ステップS14)。この後、CPU51は本処理を終了する。
【0046】
このように、本実施形態のタクシメータによれば、目的地付近に到着してから、運転手が支払いタリフのボタンを押下する操作を必要とせず、しかも、正確にタクシ料金を算出することができる。例えば、目的地付近に到達してから、信号待ちが発生したり、乗客の要求により待ち時間が発生したり、停止位置が10m先に延びたりしても、シフトレバーの位置が「P」の位置にならない限り、課金が行われているので、タクシ料金が正確になる。また、車両(タクシ)の位置を高精度に検出する必要がなく、安価なGPS受信器で実現することができる。
【0047】
また、メータ状態(装置状態)が表示されるので、タクシ走行料金の算出が停止された後の最終的なタクシ走行料金がわかる。また、タクシ走行料金が拡大して表示されるので、乗客にとってタクシ走行料金が見やすくなる。また、ナビゲーション装置から目的地が取得されるので、ナビゲーション装置とは別に、目的地を入力する操作が不要となる。
【0048】
なお、本発明は、上記実施形態の構成に限られるものではなく、特許請求の範囲で示した機能、または本実施形態の構成が持つ機能が達成できる構成であればどのようなものであっても適用可能である。
【0049】
例えば、上記実施形態では、降車前に行われる操作の検知として、ステップS4でシフトレバーの位置が駐車を表す「P」の位置にセットされたことを検知したが、シフトレバーの位置を検知することにかかわらず、その他の動作を検知してもよい。具体的に、タクシの乗客側のドアが開かれることを降車前に行われる操作として、ステップS4では、ドア開センサを用いてドアの開操作が検知されたか否かを判別するようにしてもよい。ドアが開かれないと、降車が行われないので、確実にタクシ走行料金を提示することができる。
【0050】
また、乗務員もしくは乗客のシートベルトが外されることを降車前に行われる操作とし、ステップS4では、シートベルトが外されたか否かを検知するようにしてもよい。また、夜間の場合、精算のために、車内灯(ループランプ)が点灯したことを降車前に行われる操作とし、ステップS4では、車内灯が点灯したか否かを判別するようにしてもよい。
【0051】
また、上記実施形態では、タクシが目的地付近に到達すると、走行距離および走行中の停車時間に基づく算出規則から、走行中の停車時間のみに基づく算出規則に変更していたが、算出規則はこれに限られない。例えば、到達前の走行距離および走行中の停車時間に基づく算出規則に対し、到達後では、走行距離と走行中の停車時間の重み係数を変更した算出規則であってもよいし、単に、到達後では、一律に到達前の50%とした割安な算出規則に変更してもよい。
【0052】
また、上記実施形態では、ナビゲーション装置はタクシメータとは別体として設けられ、ナビゲーション装置とタクシメータとは通信インタフェースを介してデータの送受信が行われていたが、タクシメータにナビゲーション装置の機能が組み込まれていてもよいし、同一の筐体内あるいは基板上にタクシメータおよびナビゲーション装置の機能が搭載されていてもよい。
【0053】
また、上記実施形態では、液晶表示器(LCD)からなる表示装置の画面上に、タクシ走行料金の表示を行ったが、タクシ走行料金の提示として、タクシメータにプリンタが設けられている場合、このプリンタから出力される用紙にタクシ走行料金を印字してもよい。
【0054】
また、上記実施形態では、タクシに搭載されたタクシメータに適用される場合を示したが、本発明の走行記録装置は、運送トラックや各種の作業車などに搭載することも可能である。例えば、レンタルされた運送トラックや作業車の場合、タクシメータの場合と異なり、運転手自身の降車によって走行料金が提示されることになる。
【0055】
また、上記実施形態では、GPS受信器により車両の現在位置を取得していたが、現在位置を高精度に取得する必要がないので、安価なGPS受信器、あるいはGPS受信器を用いずに、車速センサなどを用いて走行距離を計測し、この走行距離から現在位置をおおまかに把握する装置で済ますことも可能である。
【符号の説明】
【0056】
10 タクシメータ
11 CPU
12 ROM
13 RAM
14 RTC
15 表示器
16 受信I/F
17 ETCI/F
18 カード(R/W)I/F
19 入力ポート
20 通信I/F
21 センサI/F
22 出力I/F
25 シフトレバー
30 GPS受信器
32 車速センサ
34 各種ボタン
34a 空車ボタン
34b 実車ボタン
34c 支払ボタン
34d 合計ボタン
34e 迎車ボタン
34f 高速ボタン
34g 未収ボタン
34h 書込ボタン
37 レバー位置センサ
39 ETC車載器
40 メモリカード
42 外部機器(プリンタ)
50 ナビゲーション装置
51 CPU
52 ROM
53 RAM
54 タッチパネル表示器
55 地図データベース(DB)部
56 ルート設定部
56a 各種ボタン
57 案内情報生成部
58 受信I/F
59 センサI/F
60 通信I/F
61 スピーカ
70 GPS受信器
【技術分野】
【0001】
本発明は、車両の走行中、走行料金を算出する走行記録装置、走行料金提示方法及び走行記録システムに関する。
【背景技術】
【0002】
従来、タクシが目的地に到着すると、タクシメータは、つぎのような動作を行っていた。図8は従来のタクシメータの動作手順を示すフローチャートである。タクシメータは、タクシが目的地に到着するまで待ち(ステップS101)、目的地に到着すると、支払いタリフのボタンが押下されるまで待つ(ステップS102)。
【0003】
支払いタリフのボタンが押下されると、タクシメータは、メータ状態を「支払」に遷移させ(ステップS103)、さらに、その表示部にタクシ走行料金の金額を表示する(ステップS104)。この後、タクシメータは、タクシ走行料金の精算の確認、領収書発行などの決済処理を行い(ステップS105)、本処理を終える。
【0004】
また、この種の従来技術として、特許文献1には、タクシ車載装置から通知される出発地点および目的地点と実績情報とに基づいて、所要時間、距離、タクシ料金を予測し、この予測されたタクシ料金をタクシ車載装置に通知することが示されている。
【0005】
同様に、特許文献2においても、GPSから現在位置のデータを得て、入力された目的地までの経路をもとに、時間距離併用運賃制による予測タクシ料金を算出し、利用者に提示することが示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−115061号公報
【特許文献2】特開2007−334472号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来の特許文献1、2に記載されたタクシメータでは、出発地点から目的地点までのタクシ料金を事前に予測するものであり、実際にタクシが目的地に到着してから、タクシ料金を提示するものとは異なる。このため、予測されたタクシ料金と実際に要したタクシ料金とが違ってくることが予想された。
【0008】
また、図8に示した動作を行う、上記従来のタクシメータでは、タクシが目的地付近に到達し、賃走を終了して決済処理に移行させるためには、運転手が支払いタリフのボタンを押下しなければならず、操作に手間取ったりした。また、ボタンを押下した地点と乗客が降車する目的地点とは必ずしも一致しないことがあった。
【0009】
また、支払いタリフのボタン押下によって支払い料金が確定してしまうので、その後、乗客の指示等によって短い距離を走行(例えば、10〜30m)しても、あるいは信号待ち等によって待ち時間が発生しても、支払い料金に加算されることはなく、タクシ走行料金が正確に算出されないことがあった。
【0010】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる走行記録装置、走行料金提示方法及び走行記録システムを提供することにある。
【課題を解決するための手段】
【0011】
前述した目的を達成するために、本発明に係る走行記録装置は、下記(1)〜(8)を特徴としている。
(1) 車両の走行中、走行料金を算出する走行記録装置であって、
前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたこと。
(2) 上記(1)記載の走行記録装置であって、
前記走行記録装置が走行料金を算出する状態から走行料金の算出を停止する状態に装置状態を切り替える切替手段を備え、
前記提示手段は、前記切替手段によって切り替えられた装置状態および前記走行料金を提示する
こと。
(3) 上記(2)記載の走行記録装置であって、
前記提示手段は、前記装置状態および前記走行料金を表示する画面を有し、前記装置状態の切り替えと同時に、前記走行料金を拡大して表示する
こと。
(4) 上記(1)〜(3)のいずれか一つに記載の走行記録装置であって、
前記変更手段は、前記目的地付近に到達する前、走行距離および走行中の停車時間に基づく算出規則から、前記目的地付近に到達した後、走行中の停車時間のみに基づく算出規則に切り替える
こと。
(5) 上記(1)〜(4)のいずれか一つに記載の走行記録装置であって、
前記検知手段は、前記車両のシフトレバーの位置を検知するレバー位置センサを有し、前記降車前に行われる操作として、前記シフトレバーの位置が駐車時の位置になったことを検知する
こと。
(6) 上記(1)〜(4)のいずれか一つに記載の走行記録装置であって、
前記検知手段は、前記車両のドアの開操作を検知するドア開センサを有し、前記降車前に行われる操作として、前記ドアの開操作を検知する
こと。
(7) 上記(1)〜(6)のいずれか一つに記載の走行記録装置であって、
前記目的地取得手段は、前記車両を目的地に案内するナビゲーション装置から、当該ナビゲーション装置に登録された前記目的地を取得する
こと。
(8) 上記(1)〜(7)のいずれか一つに記載の走行記録装置であって、
前記位置取得手段は、GPS装置から前記車両の現在位置の座標を表す信号を受信する
こと。
【0012】
上記(1)の構成の走行記録装置によれば、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。例えば、目的地付近に到達してから、信号待ちが発生したり、乗客の要求により待ち時間が発生したり、停止位置が10m先に延びたりしても、降車前に行われる操作が検知されない限り、課金が行われているので、走行料金が正確になる。また、車両の現在位置を高精度に検出する必要がなく、位置を検出する装置(例えば、GPS受信器)を安価なもので済ますことができる。
上記(2)の構成の走行記録装置によれば、切り替えられた装置状態が提示されるので、走行料金の算出が停止された後の最終的な走行料金がわかる。
上記(3)の構成の走行記録装置によれば、走行料金が見やすくなる。
上記(4)の構成の走行記録装置によれば、目的地付近に到達してから、信号待ちや乗客の要求により待ち時間が発生しても、正確な走行料金が算出される。
上記(5)の構成の走行記録装置によれば、降車前に行われる操作を簡単に検知することができる。また、降車位置が10m先に延びたりしても、シフトレバーの位置が駐車時の位置にならない限り、課金が行われるので、走行料金が正確になる。
上記(6)の構成の走行記録装置によれば、降車前に行われる操作を簡単に検知することができる。また、ドアが開かれないと、降車が行われないので、確実に走行料金を提示することができる。
上記(7)の構成の走行記録装置によれば、ナビゲーション装置とは別に、目的地を入力する操作が不要となる。
上記(8)の構成の走行記録装置によれば、車両の現在位置を高精度に検出する必要がなく、安価なGPS受信器で実現することができる。
【0013】
前述した目的を達成するために、本発明に係る走行料金提示方法は、下記(9)を特徴としている。
(9) 車両の走行中、走行記録装置が走行料金を算出して提示する走行料金提示方法であって、
前記車両が走行する目的地を取得する目的地取得ステップと、
前記車両の現在位置を取得する位置取得ステップと、
前記位置取得ステップで取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別ステップと、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更ステップと、
降車前に行われる操作を検知する検知ステップと、
前記変更ステップで算出規則が変更され、かつ、前記検知ステップで降車前に行われる操作が検知された場合、走行料金を提示する提示ステップと
を有すること。
【0014】
上記(9)の構成の走行料金提示方法によれば、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。
【0015】
前述した目的を達成するために、本発明に係る走行記録システムは、下記(10)を特徴としている。
(10) 車両の走行中、走行料金を算出する走行記録装置および前記車両を目的地に案内するナビゲーション装置を備えた走行記録システムであって、
前記ナビゲーション装置に登録された、前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたこと。
【0016】
上記(10)の構成の走行記録システムによれば、これにより、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。
【発明の効果】
【0017】
本発明の走行記録装置、走行料金提示方法及び走行記録システムによれば、車両が目的地付近に到達して、算出規則が変更され、かつ、降車前に行われる操作が検知された場合、走行料金を提示するので、目的地付近に到着してから、運転手のボタン押下を必要とせず、しかも、正確に走行料金を算出することができる。
【図面の簡単な説明】
【0018】
【図1】実施形態における走行記録システムの構成を示すブロック図である。
【図2】タクシメータ10の外観を示す正面図である。
【図3】ナビゲーション装置50の外観を示す正面図である。
【図4】シフトレバー25およびレバー位置センサ37の配置を示す図である。
【図5】タクシメータ10の動作手順を示すフローチャートである。
【図6】タクシメータ10およびナビゲーション装置50の表示画面を示す図であって、図6(A)〜図6(C)はそれぞれその表示画面の一例を示す図である。
【図7】ナビゲーション装置50の動作手順を示すフローチャートである。
【図8】従来のタクシメータの動作手順を示すフローチャートである。
【発明を実施するための形態】
【0019】
本発明の実施形態の走行記録装置、走行料金提示方法及び走行記録システムについて図面を参照しながら説明する。本実施形態の走行記録装置は、タクシ車両に搭載されたタクシメータに適用される。また、本実施形態の走行記録システムは、ナビゲーション装置およびタクシメータから構成される。
【0020】
(第1の実施形態)
図1は実施形態における走行記録システムの構成を示すブロック図である。本実施形態の走行記録システムは、前述したように、タクシメータ10およびナビゲーション装置50から構成される。図2はタクシメータ10の外観を示す正面図である。図3はナビゲーション装置50の外観を示す正面図である。
【0021】
タクシメータ10には、CPU(Central Processing Unit)11を中心とし、このCPU11に接続されるROM(Read Only Memory)12、RAM(Random Access Memory)13、RTC14、表示器15および各種インタフェース(I/F)16、17、18、19、20、21、22が設けられている。
【0022】
CPU11は、タクシメータ全体を制御するものであり、ROM12に格納された動作プログラムを実行する。ROM12には、前述した動作プログラムが格納される他、料金の算出規則を表す数式や係数(もしくは料金表)などが格納されている。RAM13は、CPU11によるプログラムの実行に伴って一時的に使用される。また、RAM13には、走行ルート、出発地や目的地(到着地点)などが記憶される。
【0023】
RTC(Real Time Clock)14は現在時刻を計時する時計ICからなる。表示器15は、LCD(Luquid Crystal Display)からなり、走行距離、タクシ走行料金(運賃)、タリフ状態等を表示する。
【0024】
各種I/Fとして、GPS受信器30との接続を行う受信I/F16、ETC車載器39との接続を行うETCI/F17、メモリカード(ICカード)40との接続を行うカード(R/W)I/F18、車速センサ32からの信号を入力するセンサI/F21、ナビゲーション装置50に接続され、通信を行う通信I/F20、各種ボタン34の押下信号およびレバー位置センサ37の検知信号を入力する入力ポート19、および外部機器(ここでは、プリンタ)42との接続を行う出力I/F22が用いられる。
【0025】
車速センサ32は、ロータリーエンコーダからなり、走行距離演算用のパルス信号として、後輪(駆動輪)のトランスミッション回転数に応じた数のパルス信号を発生し、CPU11にスピード信号を出力する。また、各種ボタン34として、図2に示すように、空車ボタン34a、実車ボタン34b、支払ボタン34c、合計ボタン34d、迎車ボタン34e、高速ボタン34f、未収ボタン34g、書込ボタン34hなどが設けられ、CPU11に、タリフ状態(空車、賃走、割増、迎車等)を表す信号などが入力される。
【0026】
GPS(Global Positioning System)受信器30は、車両に取り付けられ、複数のGPS衛星からの電波を受信し、車両の現在位置の座標(GPS座標)を表す信号を出力する。CPU11がGPS受信器30からGPS座標を取得する手段は位置取得手段に相当する。
【0027】
ETC(Electronic Toll Collection)車載器39は、無線通信を利用して車両と料金所のシステムが必要な情報を交換し、料金の収受を行う。
【0028】
レバー位置センサ37は、トランスミッションのギアの組み合わせを変更するシフトレバー25の近傍に設けられ、シフトレバー25の位置を検知する。図4はシフトレバー25およびレバー位置センサ37の配置を示す図である。レバー位置センサ37は、シフトレバー25の位置が、駐車(パーキング)を表す「P」、後退を表す「R」、通常ドライブを表す「D」、低速ドライブを表す「L」の位置にある場合、それぞれの位置に応じてオン/オフとなるスイッチ群から構成されている。レバー位置センサ37によって検知されたシフト位置信号は入力ポート19を介してCPU11に入力される。ここでは、AT(オートマッチ)車の場合を示したが、MT(マニュアル)車においても同様である。MT車の場合、シフトレバーがニュートラルに入れられ、サイドブレーキが引かれた状態がAT車のシフトレバーの位置が「P」と同じ状態に相当するので、この場合、レバー位置センサは、シフトレバーがニュートラルであり、かつ、サイドブレーキが引かれていることを検知する。
【0029】
一方、ナビゲーション装置50は、CPU51、ROM52、RAM53、タッチパネル表示器54、地図データベース(DB)部55、ルート設定部56、案内情報生成部57、スピーカ61および各種I/F58、59、60を有する。
【0030】
各種I/Fとして、GPS受信器70との接続を行う受信I/F58、車速センサ32からの信号を入力するセンサI/F59、およびタクシメータ10に接続され、通信を行う通信I/F60が用いられる。
【0031】
CPU51は、ナビゲーション装置全体を制御するものであり、ROM52に格納された動作プログラムを実行する。CPU51は、プログラムの実行に従って、タッチパネル表示器54の表示を制御する。ROM52には、前述した動作プログラムが格納される他、各種の設定値が格納されている。RAM53は、CPU51による動作プログラムの実行に伴って使用される。
【0032】
GPS受信器70は、GPS受信器30と同様、車両に取り付けられ、複数のGPS衛星からの電波を受信する。なお、GPS受信器70は、タクシメータ10に接続されたGPS受信器30とは別体のものであってもよいし、単体として同じものであってもよい。CPU51は、GPS受信器70から送られる受信信号をもとに、車両の現在位置の座標(GPS座標)を取得する。
【0033】
タッチパネル表示器54は、液晶表示パネルおよびその前面に設けられたタッチパネルからなる。地図DB部55には、カーナビゲーションに使用される地図情報が格納されている。
【0034】
ルート設定部56は、各種ボタン56aを有し、この各種ボタン56aから、あるいはタッチパネル表示器54を通して入力された出発地および目的地(到着地)などの地点情報から走行経路を自動的に決定したり、タッチパネルをなぞった軌跡から走行経路を設定する機能を有する。出発地、目的地、走行経路等の情報は、ルート設定部56内のメモリに登録される。また、出発地および目的地の座標はRAM53にも登録されてもよい。
【0035】
案内情報生成部57は、GPS位置情報をもとに、走行経路に沿って車両の進行を案内する情報を生成する。この案内する情報は、タッチパネル表示器54の画面の更新に用いられる画像データ、および音声ガイダンスとして使用される音声データからなる。スピーカ61はこの音声データに基づく音声を発する。図3に示すタッチパネル表示器54の画面には、立体的に表示された画像を用いて車両の進行方向が矢印aで表されるとともに、現在位置が「○○町△番地」であることが示されている。
【0036】
上記構成を有する走行記録システムの動作を示す。図5はタクシメータ10の動作手順を示すフローチャートである。この動作プログラムはROM12に格納されており、CPU11によって営業中(走行中)、所定の周期ごとに実行される。ここで、営業中、CPU11は、別の課金処理において、走行距離および走行中の停車時間に基づく算出規則に従って運賃を算出し、メータ表示部(表示器)15の画面に表示する動作を繰り返す。図6(A)〜図6(C)はタクシメータ10およびナビゲーション装置50の表示画面を示す図である。図6(A)に示すように、営業中、メータ表示部(表示器)15には、メータ状態が「賃走」であり、只今の運賃が「1020円」であることが示される。
【0037】
まず、CPU11は、ナビゲーション装置50から目的地の座標データを受信する(ステップS1)。なお、ステップS1の処理は目的地取得手段に相当する。CPU11は、GPS受信器30から受信した現在位置の座標(GPS座標)をもとに、現在位置が目的地付近になるまで待つ(ステップS2)。ここで、目的地付近とは、例えば、ナビゲーション装置50で設定された目的地から所定距離(一例として50m)の範囲内などが挙げられる。
【0038】
現在位置が目的地付近になると、CPU11は、走行距離および走行中の停車時間に基づく算出規則から、走行中の停車時間のみに基づく算出規則に変更する(ステップS3)。なお、このとき、算出規則が変更されたことを、表示器15等を用いて乗務員(運転手)に知らせるようにしてもよい。
【0039】
そして、CPU11は、レバー位置センサ37から出力される信号を読み込み、降車前に行われる操作として、シフトレバー25の位置が駐車時の「P」の位置になるまで待つ(ステップS4)。
【0040】
シフトレバー25の位置が駐車時の「P」の位置になると、CPU11は、タクシメータ10の状態(メータ状態)を“賃走”から“支払”に遷移させ、表示器15の画面上で「賃走」を消灯し、「支払」を点灯させる(ステップS5)。なお、このメータ状態の遷移は、装置状態を切り替える切替手段に相当する。また、ステップS5では、メータ状態の遷移と同時に、表示器15の画面では、運賃が拡大して表示される。具体的に、図6(B)に示すように、タクシが目的地に到着すると、タクシメータ10の表示器15の画面には、メータ状態を表す「支払」が点灯し、運賃「1360円」が拡大して表示される。これにより、乗客にとって運賃が見やすくなる。
【0041】
なお、シフトレバー25の位置が駐車時の「P」の位置になる前であっても、乗務員(運転手)は、支払いボタン34cを押下することにより、メータ状態を“支払”に強制的に遷移させてもよい。
【0042】
CPU11は、確定した運賃(タクシ走行料金)の金額データをナビゲーション装置50に送信する(ステップS6)。これにより、ナビゲーション装置50のタッチパネル表示器54にも、タクシ走行料金が表示される(図6(C)参照)。この後、CPU11は、決済処理を行い(ステップS7)、本処理を終了する。この決済処理では、例えば、乗務員が合計ボタン34dを押して合計金額を表示させ、乗客から金銭を受け取り、点灯している未収ボタン34gを押すことにより精算が行われる。そして、CPU11は本処理を終了する。
【0043】
図7はナビゲーション装置50の動作手順を示すフローチャートである。この動作プログラムは、ROM52に格納されており、CPU51によって所定時間ごとに実行される。
【0044】
まず、CPU51は、タクシメータ10から、目的地座標の取得要求があったか否かを判別する(ステップS11)。取得要求がなかった場合、CPU51は、そのままステップS13の処理に進む。一方、目的地座標の取得要求があった場合、CPU51は、ルート設定部56内のメモリもしくはRAM53に登録された目的地座標を読み込み、通信I/F60を介してタクシメータ10に送信する(ステップS12)。
【0045】
CPU51は、タクシメータ10から金額データを受信したか否かを判別する(ステップS13)。金額データを受信しなかった場合、CPU51は本処理を終了する。一方、タクシメータ10から金額データを受信した場合、タッチパネル表示器54の画面を切り替え、図6(C)に示すように、タクシ料金の精算を促す表示を行う(ステップS14)。この後、CPU51は本処理を終了する。
【0046】
このように、本実施形態のタクシメータによれば、目的地付近に到着してから、運転手が支払いタリフのボタンを押下する操作を必要とせず、しかも、正確にタクシ料金を算出することができる。例えば、目的地付近に到達してから、信号待ちが発生したり、乗客の要求により待ち時間が発生したり、停止位置が10m先に延びたりしても、シフトレバーの位置が「P」の位置にならない限り、課金が行われているので、タクシ料金が正確になる。また、車両(タクシ)の位置を高精度に検出する必要がなく、安価なGPS受信器で実現することができる。
【0047】
また、メータ状態(装置状態)が表示されるので、タクシ走行料金の算出が停止された後の最終的なタクシ走行料金がわかる。また、タクシ走行料金が拡大して表示されるので、乗客にとってタクシ走行料金が見やすくなる。また、ナビゲーション装置から目的地が取得されるので、ナビゲーション装置とは別に、目的地を入力する操作が不要となる。
【0048】
なお、本発明は、上記実施形態の構成に限られるものではなく、特許請求の範囲で示した機能、または本実施形態の構成が持つ機能が達成できる構成であればどのようなものであっても適用可能である。
【0049】
例えば、上記実施形態では、降車前に行われる操作の検知として、ステップS4でシフトレバーの位置が駐車を表す「P」の位置にセットされたことを検知したが、シフトレバーの位置を検知することにかかわらず、その他の動作を検知してもよい。具体的に、タクシの乗客側のドアが開かれることを降車前に行われる操作として、ステップS4では、ドア開センサを用いてドアの開操作が検知されたか否かを判別するようにしてもよい。ドアが開かれないと、降車が行われないので、確実にタクシ走行料金を提示することができる。
【0050】
また、乗務員もしくは乗客のシートベルトが外されることを降車前に行われる操作とし、ステップS4では、シートベルトが外されたか否かを検知するようにしてもよい。また、夜間の場合、精算のために、車内灯(ループランプ)が点灯したことを降車前に行われる操作とし、ステップS4では、車内灯が点灯したか否かを判別するようにしてもよい。
【0051】
また、上記実施形態では、タクシが目的地付近に到達すると、走行距離および走行中の停車時間に基づく算出規則から、走行中の停車時間のみに基づく算出規則に変更していたが、算出規則はこれに限られない。例えば、到達前の走行距離および走行中の停車時間に基づく算出規則に対し、到達後では、走行距離と走行中の停車時間の重み係数を変更した算出規則であってもよいし、単に、到達後では、一律に到達前の50%とした割安な算出規則に変更してもよい。
【0052】
また、上記実施形態では、ナビゲーション装置はタクシメータとは別体として設けられ、ナビゲーション装置とタクシメータとは通信インタフェースを介してデータの送受信が行われていたが、タクシメータにナビゲーション装置の機能が組み込まれていてもよいし、同一の筐体内あるいは基板上にタクシメータおよびナビゲーション装置の機能が搭載されていてもよい。
【0053】
また、上記実施形態では、液晶表示器(LCD)からなる表示装置の画面上に、タクシ走行料金の表示を行ったが、タクシ走行料金の提示として、タクシメータにプリンタが設けられている場合、このプリンタから出力される用紙にタクシ走行料金を印字してもよい。
【0054】
また、上記実施形態では、タクシに搭載されたタクシメータに適用される場合を示したが、本発明の走行記録装置は、運送トラックや各種の作業車などに搭載することも可能である。例えば、レンタルされた運送トラックや作業車の場合、タクシメータの場合と異なり、運転手自身の降車によって走行料金が提示されることになる。
【0055】
また、上記実施形態では、GPS受信器により車両の現在位置を取得していたが、現在位置を高精度に取得する必要がないので、安価なGPS受信器、あるいはGPS受信器を用いずに、車速センサなどを用いて走行距離を計測し、この走行距離から現在位置をおおまかに把握する装置で済ますことも可能である。
【符号の説明】
【0056】
10 タクシメータ
11 CPU
12 ROM
13 RAM
14 RTC
15 表示器
16 受信I/F
17 ETCI/F
18 カード(R/W)I/F
19 入力ポート
20 通信I/F
21 センサI/F
22 出力I/F
25 シフトレバー
30 GPS受信器
32 車速センサ
34 各種ボタン
34a 空車ボタン
34b 実車ボタン
34c 支払ボタン
34d 合計ボタン
34e 迎車ボタン
34f 高速ボタン
34g 未収ボタン
34h 書込ボタン
37 レバー位置センサ
39 ETC車載器
40 メモリカード
42 外部機器(プリンタ)
50 ナビゲーション装置
51 CPU
52 ROM
53 RAM
54 タッチパネル表示器
55 地図データベース(DB)部
56 ルート設定部
56a 各種ボタン
57 案内情報生成部
58 受信I/F
59 センサI/F
60 通信I/F
61 スピーカ
70 GPS受信器
【特許請求の範囲】
【請求項1】
車両の走行中、走行料金を算出する走行記録装置であって、
前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたことを特徴とする走行記録装置。
【請求項2】
前記走行記録装置が走行料金を算出する状態から走行料金の算出を停止する状態に装置状態を切り替える切替手段を備え、
前記提示手段は、前記切替手段によって切り替えられた装置状態および前記走行料金を提示する
ことを特徴とする請求項1記載の走行記録装置。
【請求項3】
前記提示手段は、前記装置状態および前記走行料金を表示する画面を有し、前記装置状態の切り替えと同時に、前記走行料金を拡大して表示する
ことを特徴とする請求項2記載の走行記録装置。
【請求項4】
前記変更手段は、前記目的地付近に到達する前、走行距離および走行中の停車時間に基づく算出規則から、前記目的地付近に到達した後、走行中の停車時間のみに基づく算出規則に切り替える
ことを特徴とする請求項1ないし3のいずれか一項に記載の走行記録装置。
【請求項5】
前記検知手段は、前記車両のシフトレバーの位置を検知するレバー位置センサを有し、前記降車前に行われる操作として、前記シフトレバーの位置が駐車時の位置になったことを検知する
ことを特徴とする請求項1ないし4のいずれか一項に記載の走行記録装置。
【請求項6】
車両の走行中、走行記録装置が走行料金を算出して提示する走行料金提示方法であって、
前記車両が走行する目的地を取得する目的地取得ステップと、
前記車両の現在位置を取得する位置取得ステップと、
前記位置取得ステップで取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別ステップと、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更ステップと、
降車前に行われる操作を検知する検知ステップと、
前記変更ステップで算出規則が変更され、かつ、前記検知ステップで降車前に行われる操作が検知された場合、走行料金を提示する提示ステップと
を有することを特徴とする走行料金提示方法。
【請求項7】
車両の走行中、走行料金を算出する走行記録装置および前記車両を目的地に案内するナビゲーション装置を備えた走行記録システムであって、
前記ナビゲーション装置に登録された、前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたことを特徴とする走行記録システム。
【請求項1】
車両の走行中、走行料金を算出する走行記録装置であって、
前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたことを特徴とする走行記録装置。
【請求項2】
前記走行記録装置が走行料金を算出する状態から走行料金の算出を停止する状態に装置状態を切り替える切替手段を備え、
前記提示手段は、前記切替手段によって切り替えられた装置状態および前記走行料金を提示する
ことを特徴とする請求項1記載の走行記録装置。
【請求項3】
前記提示手段は、前記装置状態および前記走行料金を表示する画面を有し、前記装置状態の切り替えと同時に、前記走行料金を拡大して表示する
ことを特徴とする請求項2記載の走行記録装置。
【請求項4】
前記変更手段は、前記目的地付近に到達する前、走行距離および走行中の停車時間に基づく算出規則から、前記目的地付近に到達した後、走行中の停車時間のみに基づく算出規則に切り替える
ことを特徴とする請求項1ないし3のいずれか一項に記載の走行記録装置。
【請求項5】
前記検知手段は、前記車両のシフトレバーの位置を検知するレバー位置センサを有し、前記降車前に行われる操作として、前記シフトレバーの位置が駐車時の位置になったことを検知する
ことを特徴とする請求項1ないし4のいずれか一項に記載の走行記録装置。
【請求項6】
車両の走行中、走行記録装置が走行料金を算出して提示する走行料金提示方法であって、
前記車両が走行する目的地を取得する目的地取得ステップと、
前記車両の現在位置を取得する位置取得ステップと、
前記位置取得ステップで取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別ステップと、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更ステップと、
降車前に行われる操作を検知する検知ステップと、
前記変更ステップで算出規則が変更され、かつ、前記検知ステップで降車前に行われる操作が検知された場合、走行料金を提示する提示ステップと
を有することを特徴とする走行料金提示方法。
【請求項7】
車両の走行中、走行料金を算出する走行記録装置および前記車両を目的地に案内するナビゲーション装置を備えた走行記録システムであって、
前記ナビゲーション装置に登録された、前記車両が走行する目的地を取得する目的地取得手段と、
前記車両の現在位置を取得する位置取得手段と、
前記位置取得手段によって取得された前記車両の現在位置をもとに、前記車両が前記目的地から所定の範囲内である目的地付近に到達したか否かを判別する判別手段と、
前記目的地付近に到達した場合、前記走行料金の算出規則を変更する変更手段と、
降車前に行われる操作を検知する検知手段と、
前記変更手段によって算出規則が変更され、かつ、前記検知手段によって降車前に行われる操作が検知された場合、走行料金を提示する提示手段と
を備えたことを特徴とする走行記録システム。
【図1】



【図2】

【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−146074(P2012−146074A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−3169(P2011−3169)
【出願日】平成23年1月11日(2011.1.11)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月11日(2011.1.11)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
[ Back to top ]