
走行路の一部に設置された磁石により走行制御される電動走行玩具
【課題】走行体に搭載した電動モーターによって車輪を駆動して走行路を自走する走行玩具において走行体へ与える指示を簡単な電気的方法で遠隔操作可能とする。
【解決手段】走行体2に搭載した電動モーター6によって車輪5を駆動して走行路1を自走する走行玩具2において、走行体2には走行路1上の一部に設置された磁石3を検出するための磁気センサ4と、上記磁気センサ4からの信号を受け取って走行用モーター6の回転を制御するための制御装置を搭載し、磁気センサ4が走行路1上の磁石3を検出すると、上記制御装置は、磁石3の配置パターンに応じて上記走行体2の走行する方向を逆転させる、または上記走行体2の走行速度を上げる、または上記走行体2の走行速度を下げる、または上記走行体2を停止させるように走行用モーター6の制御を行う。
【解決手段】走行体2に搭載した電動モーター6によって車輪5を駆動して走行路1を自走する走行玩具2において、走行体2には走行路1上の一部に設置された磁石3を検出するための磁気センサ4と、上記磁気センサ4からの信号を受け取って走行用モーター6の回転を制御するための制御装置を搭載し、磁気センサ4が走行路1上の磁石3を検出すると、上記制御装置は、磁石3の配置パターンに応じて上記走行体2の走行する方向を逆転させる、または上記走行体2の走行速度を上げる、または上記走行体2の走行速度を下げる、または上記走行体2を停止させるように走行用モーター6の制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は走行路を走る電動玩具の走行を自動制御するための技術に関する。
【背景技術】
【0002】
従来より、遠隔操作で走行路を走行させる鉄道模型や自動車等の走行システムがある。この従来の走行システムは、操作者が走行体の走行状態を見ながら、速度をリモコン送信機で遠隔操作するものである。例えば走行体が直線状の走行路を走行する場合は、リモコン操作により走行体の速度を上げ、カーブを走行する場合は、リモコン操作により走行体の速度を下げ、走行路終端部ではリモコン操作によって走行体の走行方向を反転させ、信号や駅ではリモコン操作によって走行体を停止させていた。しかしこのようなリモコン操作では、走行体を良好な走行状態で無人自動運転させることはできない。
【0003】
走行路に走行体を検出するための複数のセンサを設置し、センサからの信号に基づいて走行体をリモートコントロールにより自動運転する方法がある(特許文献1、実用新案文献1および2参照)。これらはセンサとリモートコントローラを電線で接続することが必要であり、システムの組立てや移動が煩雑であり、また自動運転の実施にはコントローラをプログラムするための専門知識が必要となる問題がある。
【0004】
そこで走行路内に移動盤を設け、この移動盤と走行体に設置された操作レバーを物理的に接触させて走行体へ発車・停止および通過・バック等の指示を与える方法(実用新案文献3参照)や、走行路上にマークを貼り付け、このマークを走行体に取り付けた光学的センサで読み取り、走行体の速度を上記センサの光信号に基づいて予め入力された速度レベルに切り替えるよう制御装置を構成する方法がある(特許文献2参照)。しかし走行路上のマークを光学的に読み取る方法では、マーク面の汚れや環境光などによる誤動作が起きやすい問題がある。また、移動盤や光学的マークは、走行路の形状や色彩のデザインに制約を強制する問題があり、さらに、どの位置で指示を与えているのかが視覚的に明らかになってしまうので、自動制御で決められた場所を勝手に動くというミステリアスな玩具としての要素を半減させてしまう問題がある。
【特許文献1】特開平03−205090
【特許文献2】特許3806572
【実用新案文献1】
実開平5−9598
【実用新案文献2】
実開平02−035789
【実用新案文献3】
実願昭54−56635
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、走行路の状況に合わせて走行体の速度および走行方向・停止や発進を行う位置を予め指示しておき、走行体を指示通りに、しかも簡単に自動運転させるためのシステムを提供し、さらに前述の問題点である光学的なノイズの影響による誤動作の問題を解消し、また走行体に指示を与えるためのマークを不可視として、玩具として意外性を持たせるものである。さらに、走行体へ与える指示を簡単かつ安価な電気的回路によって遠隔操作を可能とする。
【課題を解決するための手段】
【0006】
走行体が移動する走行路上の一部に永久磁石または電磁石を設ける。電動モーターによって車輪を駆動して走る走行体には上記磁石を検出するための磁気センサと、上記磁気センサからの信号を受け取って走行用モータの回転を制御するための制御装置を搭載する。上記制御装置は、走行用モータの回転制御において、回転の開始と停止、回転方向の反転、または回転速度の段階的切替のうちのどれかを行い、切り替える前の状態を記憶し、切り替えた後の状態を保持できるように構成する。磁気センサが走行路上の磁石を検出すると、上記制御装置により、磁石の配置パターンに応じて上記走行体の走行する方向を逆転させる、または上記走行体の走行速度を上げる、または上記走行体の走行速度を下げる、または上記走行体を発進あるいは停止させるように動作を切替える。走行体の走行する方向を逆転させたり、走行速度を上下した場合は、再び磁気センサが別の磁石を検出するまで、切替えた状態を保持する。走行体が停止中の場合は、磁石が検出されなくなるまでか、一定時間経過するまで、停止した状態を保持し、その後停止する以前の走行状態に戻って走行を再開する。
【発明の効果】
【0007】
本発明は、走行路の状況に合わせて走行体の速度および走行方向・停止や発進を行う位置を予め走行路へ磁石を配置することで指示しておき、走行体を指示通りに簡単に自動運転させるシステムが実現される。このとき、走行体のレイアウトが変更されても、走行体の制御装置のプログラムを変更することなく、走行路の磁石の位置を変えるだけで対応できるため、プログラミングやシステム構築のための高度な専門知識が不要となる効果が得られる。
【0008】
本発明は走行路をプラスチック等の非磁性体で構成すれば、磁石を走行路に露出させる必要がないので、走行路の形状デザインについて制約は小さく、色彩デザインについては制約が無いという効果が得られる。また、視覚的にマークの存在しない走行路において、自動制御で決められた場所を勝手に動くようなミステリアスな玩具としての効果が得られる。
【0009】
走行路に設置した磁石による磁気を制御信号として用いるため、走行路の汚れや環境光による誤動作が生じないという効果が得られる。
【0010】
走行路に設置する永久磁石を電磁石へ置き換えれば、電磁石へ流す電流をON/OFFするという簡単な電気的方法により走行体へ与える指示を遠隔操作できる。
【実施例】
【0011】
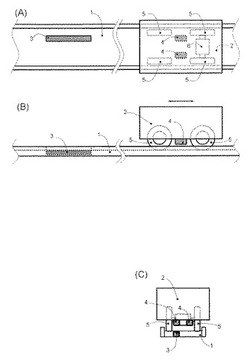
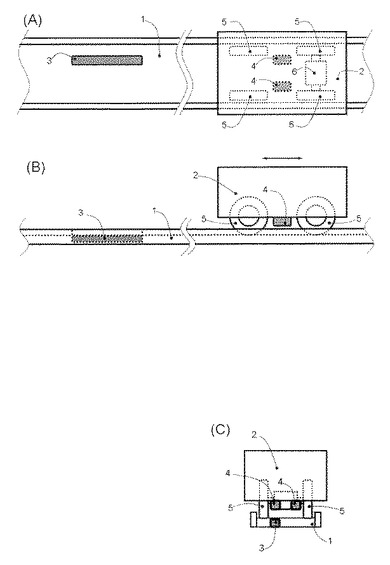
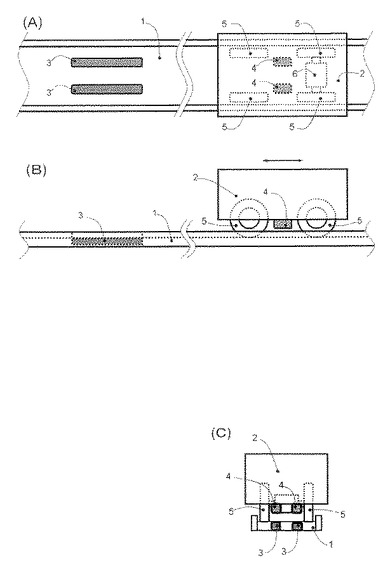
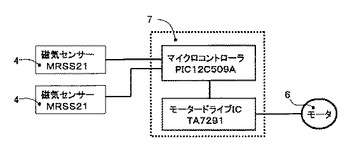
本発明の一実施例を、図面を参照して説明する。図1および図2において、符号2で示される走行体は符号1の走行路を符号6のモーターで車輪を駆動して走行する。符号2の走行体の下部には、車体中央を中心にして左右対称の位置に符号4で示される一対の磁気センサが取り付けられており、走行路の右側または左側または左右両方に埋め込まれた符号3で示される磁石をそれぞれ検出する。図1では走行路の片側のみに符号3の磁石が埋め込まれている様子を示し、図2は走行路の両側に符号3の磁石が埋め込まれている様子である。図3は符号4の磁気センサと走行用モーターおよび制御装置の構成図を示し、図4は図3の符号7で示すモーター制御装置の制御プログラムのフローチャートを示す。
【0012】
符号7で示される走行体の制御装置は、符号4の磁気センサが反応しているかどうかを監視し、進行方向右側の磁気センサが反応したら、その後進行方向左側のセンサが反応するか、あるいは進行方向左側のセンサが反応せずに進行方向右側の磁気センサの反応が消えるかどうかを判別する。もし、両側の磁気センサが反応する状況を検出したら、走行体を一時停止させた後、進行方向を反転させて走行を再開する。あるいは、進行方向右側の磁気センサのみ反応した後その反応が消える場合、走行体の速度を一段階減らす。
【0013】
また、進行方向左側の磁気センサが反応したら、その後進行方向右側のセンサが反応するか、あるいは進行方向右側のセンサが反応せずに進行方向左側の磁気センサの反応が消えるかどうかを判別する。もし、両側の磁気センサが反応する状況を検出したら、走行体を一時停止させた後、進行方向を反転させて走行を再開する。あるいは、進行方向左側の磁気センサのみ反応した後その反応が消える場合、走行体の速度を一段階増やす。
【0014】
両側の磁気センサが反応して進行方向を反転させる場合、その動作切替のトリガとなった磁石に再び反応してしまうことを防ぐため、一定時間だけ磁気センサの信号を無視した走行を行い、上記磁石の上を通過する。
【0015】
図5は本発明の走行路のレイアウトの一例で、直線状の走行路の終端部の両側にそれぞれ一対の磁石が埋め込まれており、本発明による走行体は走行路の終端部で自動的に反転する。また、走行路の中心部からみて終端部近くに埋め込まれた一対の磁石の手前部分には、走行路の片側にのみ磁石が埋め込まれた箇所がある。走行路の中央部分から終端部方向へと走行する走行体は、上記の片側のみ磁石が埋め込まれた場所を通過するとき進行方向右側のみ磁気センサが反応するので、速度を減速していくように動作する。逆に終端部で反転してから走行路の中央部分に向かう走行体は、上記の片側のみ磁石が埋め込まれた場所を通過するとき進行方向左側のみ磁気センサが反応するので、速度を加速していくように動作する。よって、図5の中央部分では常に高速に走行し、端部に近づくと自動的に減速して進行方向を反転することを繰り返すような自動制御が実現される。
【0016】
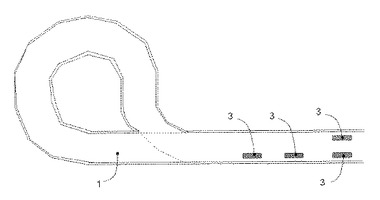
図6は本発明の走行路のレイアウトの一例で、走行路に分岐と終端部が存在している場合を示す。終端部から図6左側へ走行を開始した走行体は、走行路片側に磁石が埋め込まれた場所を通過する際、進行方向左側のみ磁気センサが反応するので、速度を加速していくように動作する。その後、曲線状の走行路と分岐を経て再び走行路片側に磁石が埋め込まれた同じ場所へ戻ってくるが、今度は進行方向右側のみ磁気センサが反応するので、速度を減速していくように動作する。走行路の終端部には一対の磁石が埋め込まれており、ここでは走行体の左右両方の磁気センサーが反応するため、進行方向が自動的に反転する。よって、図6の走行路の曲線部分では常に高速に走行し、端部に近づくと自動的に減速して進行方向を反転するような自動制御が実現される。
【0017】
ここで注目してもらいたいのは、図6や図7のようなレイアウトにおいて従来の鉄道模型の技術によって同様の自動制御を行おうとした場合、走行路に設置したセンサをコントローラに接続する必要があり、またシステムの制御プログラムはぞれぞれのレイアウト毎にプログラミングを行う必要があり、システムの構築には高度な専門知識が必要になる点である。本発明による実施例では、図6や図7のようなレイアウトは走行路が異なるだけであり走行体の制御プログラムの変更は不要である。よって小さな子供でも簡単に自動制御システムを構築できる。
【0018】
図示しないが、符号3で示される磁石は、電磁石に置き換えることにより、簡単な電気回路によって遠隔操作が実現できる。
【図面の簡単な説明】
【図1】走行路の片側に磁石が埋め込まれた場合の三面図を示したものである。
【図2】走行路の両側に磁石が埋め込まれた場合の三面図を示したものである。
【図3】走行体に搭載する制御系の構成図を示す。
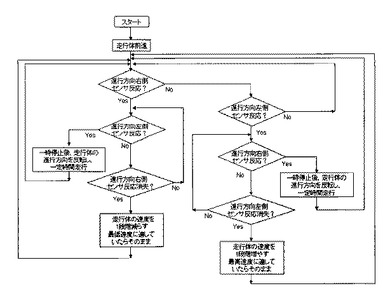
【図4】符号7のモーター制御装置の制御プログラムのフローチャートを示す。
【図5】走行路のレイアウトの例を示す。
【図6】走行路のレイアウトの例を表す。
【符号の説明】
符号1…走行路、符号2…走行体の車体、符号3…走行路に埋め込まれた磁石、符号4…磁気センサ、符号5…車輪、符号6…モーター、符号7…モータ制御装置。
【技術分野】
【0001】
本発明は走行路を走る電動玩具の走行を自動制御するための技術に関する。
【背景技術】
【0002】
従来より、遠隔操作で走行路を走行させる鉄道模型や自動車等の走行システムがある。この従来の走行システムは、操作者が走行体の走行状態を見ながら、速度をリモコン送信機で遠隔操作するものである。例えば走行体が直線状の走行路を走行する場合は、リモコン操作により走行体の速度を上げ、カーブを走行する場合は、リモコン操作により走行体の速度を下げ、走行路終端部ではリモコン操作によって走行体の走行方向を反転させ、信号や駅ではリモコン操作によって走行体を停止させていた。しかしこのようなリモコン操作では、走行体を良好な走行状態で無人自動運転させることはできない。
【0003】
走行路に走行体を検出するための複数のセンサを設置し、センサからの信号に基づいて走行体をリモートコントロールにより自動運転する方法がある(特許文献1、実用新案文献1および2参照)。これらはセンサとリモートコントローラを電線で接続することが必要であり、システムの組立てや移動が煩雑であり、また自動運転の実施にはコントローラをプログラムするための専門知識が必要となる問題がある。
【0004】
そこで走行路内に移動盤を設け、この移動盤と走行体に設置された操作レバーを物理的に接触させて走行体へ発車・停止および通過・バック等の指示を与える方法(実用新案文献3参照)や、走行路上にマークを貼り付け、このマークを走行体に取り付けた光学的センサで読み取り、走行体の速度を上記センサの光信号に基づいて予め入力された速度レベルに切り替えるよう制御装置を構成する方法がある(特許文献2参照)。しかし走行路上のマークを光学的に読み取る方法では、マーク面の汚れや環境光などによる誤動作が起きやすい問題がある。また、移動盤や光学的マークは、走行路の形状や色彩のデザインに制約を強制する問題があり、さらに、どの位置で指示を与えているのかが視覚的に明らかになってしまうので、自動制御で決められた場所を勝手に動くというミステリアスな玩具としての要素を半減させてしまう問題がある。
【特許文献1】特開平03−205090
【特許文献2】特許3806572
【実用新案文献1】
実開平5−9598
【実用新案文献2】
実開平02−035789
【実用新案文献3】
実願昭54−56635
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、走行路の状況に合わせて走行体の速度および走行方向・停止や発進を行う位置を予め指示しておき、走行体を指示通りに、しかも簡単に自動運転させるためのシステムを提供し、さらに前述の問題点である光学的なノイズの影響による誤動作の問題を解消し、また走行体に指示を与えるためのマークを不可視として、玩具として意外性を持たせるものである。さらに、走行体へ与える指示を簡単かつ安価な電気的回路によって遠隔操作を可能とする。
【課題を解決するための手段】
【0006】
走行体が移動する走行路上の一部に永久磁石または電磁石を設ける。電動モーターによって車輪を駆動して走る走行体には上記磁石を検出するための磁気センサと、上記磁気センサからの信号を受け取って走行用モータの回転を制御するための制御装置を搭載する。上記制御装置は、走行用モータの回転制御において、回転の開始と停止、回転方向の反転、または回転速度の段階的切替のうちのどれかを行い、切り替える前の状態を記憶し、切り替えた後の状態を保持できるように構成する。磁気センサが走行路上の磁石を検出すると、上記制御装置により、磁石の配置パターンに応じて上記走行体の走行する方向を逆転させる、または上記走行体の走行速度を上げる、または上記走行体の走行速度を下げる、または上記走行体を発進あるいは停止させるように動作を切替える。走行体の走行する方向を逆転させたり、走行速度を上下した場合は、再び磁気センサが別の磁石を検出するまで、切替えた状態を保持する。走行体が停止中の場合は、磁石が検出されなくなるまでか、一定時間経過するまで、停止した状態を保持し、その後停止する以前の走行状態に戻って走行を再開する。
【発明の効果】
【0007】
本発明は、走行路の状況に合わせて走行体の速度および走行方向・停止や発進を行う位置を予め走行路へ磁石を配置することで指示しておき、走行体を指示通りに簡単に自動運転させるシステムが実現される。このとき、走行体のレイアウトが変更されても、走行体の制御装置のプログラムを変更することなく、走行路の磁石の位置を変えるだけで対応できるため、プログラミングやシステム構築のための高度な専門知識が不要となる効果が得られる。
【0008】
本発明は走行路をプラスチック等の非磁性体で構成すれば、磁石を走行路に露出させる必要がないので、走行路の形状デザインについて制約は小さく、色彩デザインについては制約が無いという効果が得られる。また、視覚的にマークの存在しない走行路において、自動制御で決められた場所を勝手に動くようなミステリアスな玩具としての効果が得られる。
【0009】
走行路に設置した磁石による磁気を制御信号として用いるため、走行路の汚れや環境光による誤動作が生じないという効果が得られる。
【0010】
走行路に設置する永久磁石を電磁石へ置き換えれば、電磁石へ流す電流をON/OFFするという簡単な電気的方法により走行体へ与える指示を遠隔操作できる。
【実施例】
【0011】
本発明の一実施例を、図面を参照して説明する。図1および図2において、符号2で示される走行体は符号1の走行路を符号6のモーターで車輪を駆動して走行する。符号2の走行体の下部には、車体中央を中心にして左右対称の位置に符号4で示される一対の磁気センサが取り付けられており、走行路の右側または左側または左右両方に埋め込まれた符号3で示される磁石をそれぞれ検出する。図1では走行路の片側のみに符号3の磁石が埋め込まれている様子を示し、図2は走行路の両側に符号3の磁石が埋め込まれている様子である。図3は符号4の磁気センサと走行用モーターおよび制御装置の構成図を示し、図4は図3の符号7で示すモーター制御装置の制御プログラムのフローチャートを示す。
【0012】
符号7で示される走行体の制御装置は、符号4の磁気センサが反応しているかどうかを監視し、進行方向右側の磁気センサが反応したら、その後進行方向左側のセンサが反応するか、あるいは進行方向左側のセンサが反応せずに進行方向右側の磁気センサの反応が消えるかどうかを判別する。もし、両側の磁気センサが反応する状況を検出したら、走行体を一時停止させた後、進行方向を反転させて走行を再開する。あるいは、進行方向右側の磁気センサのみ反応した後その反応が消える場合、走行体の速度を一段階減らす。
【0013】
また、進行方向左側の磁気センサが反応したら、その後進行方向右側のセンサが反応するか、あるいは進行方向右側のセンサが反応せずに進行方向左側の磁気センサの反応が消えるかどうかを判別する。もし、両側の磁気センサが反応する状況を検出したら、走行体を一時停止させた後、進行方向を反転させて走行を再開する。あるいは、進行方向左側の磁気センサのみ反応した後その反応が消える場合、走行体の速度を一段階増やす。
【0014】
両側の磁気センサが反応して進行方向を反転させる場合、その動作切替のトリガとなった磁石に再び反応してしまうことを防ぐため、一定時間だけ磁気センサの信号を無視した走行を行い、上記磁石の上を通過する。
【0015】
図5は本発明の走行路のレイアウトの一例で、直線状の走行路の終端部の両側にそれぞれ一対の磁石が埋め込まれており、本発明による走行体は走行路の終端部で自動的に反転する。また、走行路の中心部からみて終端部近くに埋め込まれた一対の磁石の手前部分には、走行路の片側にのみ磁石が埋め込まれた箇所がある。走行路の中央部分から終端部方向へと走行する走行体は、上記の片側のみ磁石が埋め込まれた場所を通過するとき進行方向右側のみ磁気センサが反応するので、速度を減速していくように動作する。逆に終端部で反転してから走行路の中央部分に向かう走行体は、上記の片側のみ磁石が埋め込まれた場所を通過するとき進行方向左側のみ磁気センサが反応するので、速度を加速していくように動作する。よって、図5の中央部分では常に高速に走行し、端部に近づくと自動的に減速して進行方向を反転することを繰り返すような自動制御が実現される。
【0016】
図6は本発明の走行路のレイアウトの一例で、走行路に分岐と終端部が存在している場合を示す。終端部から図6左側へ走行を開始した走行体は、走行路片側に磁石が埋め込まれた場所を通過する際、進行方向左側のみ磁気センサが反応するので、速度を加速していくように動作する。その後、曲線状の走行路と分岐を経て再び走行路片側に磁石が埋め込まれた同じ場所へ戻ってくるが、今度は進行方向右側のみ磁気センサが反応するので、速度を減速していくように動作する。走行路の終端部には一対の磁石が埋め込まれており、ここでは走行体の左右両方の磁気センサーが反応するため、進行方向が自動的に反転する。よって、図6の走行路の曲線部分では常に高速に走行し、端部に近づくと自動的に減速して進行方向を反転するような自動制御が実現される。
【0017】
ここで注目してもらいたいのは、図6や図7のようなレイアウトにおいて従来の鉄道模型の技術によって同様の自動制御を行おうとした場合、走行路に設置したセンサをコントローラに接続する必要があり、またシステムの制御プログラムはぞれぞれのレイアウト毎にプログラミングを行う必要があり、システムの構築には高度な専門知識が必要になる点である。本発明による実施例では、図6や図7のようなレイアウトは走行路が異なるだけであり走行体の制御プログラムの変更は不要である。よって小さな子供でも簡単に自動制御システムを構築できる。
【0018】
図示しないが、符号3で示される磁石は、電磁石に置き換えることにより、簡単な電気回路によって遠隔操作が実現できる。
【図面の簡単な説明】
【図1】走行路の片側に磁石が埋め込まれた場合の三面図を示したものである。
【図2】走行路の両側に磁石が埋め込まれた場合の三面図を示したものである。
【図3】走行体に搭載する制御系の構成図を示す。
【図4】符号7のモーター制御装置の制御プログラムのフローチャートを示す。
【図5】走行路のレイアウトの例を示す。
【図6】走行路のレイアウトの例を表す。
【符号の説明】
符号1…走行路、符号2…走行体の車体、符号3…走行路に埋め込まれた磁石、符号4…磁気センサ、符号5…車輪、符号6…モーター、符号7…モータ制御装置。
【特許請求の範囲】
【請求項1】
走行体に搭載した電動モーターによって車輪を駆動して走行路を自走する走行玩具において、上記走行体には走行路上の一部に設置された磁石を検出するための磁気センサと、上記磁気センサからの信号を受け取って走行用モーターの回転を制御するための制御装置が搭載され、磁気センサが走行路上の磁石を検出すると、上記制御装置は、磁石の配置パターンに応じて上記走行体の走行する方向を逆転させる、または上記走行体の走行速度を上げる、または上記走行体の走行速度を下げる、または上記走行体を停止させるように走行用モーターを制御することを特徴とする走行玩具用走行体。
【請求項2】
請求項1の走行体が走行する走行路の一部に永久磁石または電磁石を設置し、その磁石の配置パターンによって請求項1の走行体に走行する方向の逆転または走行速度の増加、または走行速度の減少、または停止を指示することを特徴とする走行路および請求項1の走行体より構成される走行玩具。
【請求項1】
走行体に搭載した電動モーターによって車輪を駆動して走行路を自走する走行玩具において、上記走行体には走行路上の一部に設置された磁石を検出するための磁気センサと、上記磁気センサからの信号を受け取って走行用モーターの回転を制御するための制御装置が搭載され、磁気センサが走行路上の磁石を検出すると、上記制御装置は、磁石の配置パターンに応じて上記走行体の走行する方向を逆転させる、または上記走行体の走行速度を上げる、または上記走行体の走行速度を下げる、または上記走行体を停止させるように走行用モーターを制御することを特徴とする走行玩具用走行体。
【請求項2】
請求項1の走行体が走行する走行路の一部に永久磁石または電磁石を設置し、その磁石の配置パターンによって請求項1の走行体に走行する方向の逆転または走行速度の増加、または走行速度の減少、または停止を指示することを特徴とする走行路および請求項1の走行体より構成される走行玩具。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−279219(P2008−279219A)
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願番号】特願2007−148605(P2007−148605)
【出願日】平成19年5月8日(2007.5.8)
【出願人】(502040845)
【Fターム(参考)】
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願日】平成19年5月8日(2007.5.8)
【出願人】(502040845)
【Fターム(参考)】
[ Back to top ]