
走行路の測定方法
本発明は、絶対座標系に対する軌道の実際の位置を含む軌道測定計画による軌道測定方法に関するものである。測定プラットホーム2は、慣性プラットホーム6を搭載し、軌道に沿って案内される。慣性プラットホーム6は、測定開始時に初期設定または較正され、かつ座標系に対して整合される。慣性プラットホーム6は、また測定プラットホーム2の走行中に座標系に対するその時々の測定プラットホーム位置を検出する。慣性プラットホーム6の位置データは、軌道近くに配置された固定点9,9´に基づいて周期的に点検され、座標系に対する偏差は、新たな較正または整合により修正される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特許請求の範囲の請求項1の上位概念部分に記載された測定方法に関するものである。
【背景技術】
【0002】
走行路(例えば、道路や鉄道の軌道)の保守や新設の際、走行路の伸長形態が極めて精密に測定され、目標伸長形態と比較され、適切な軌道建設機械を用いて走行路の伸長形態に修正が加えられる。
基本的に、走行路の伸長形態は、走行路の外部から地理的な基準点に依拠して適切な測定手段を用いて極めて正確に測定できる。もちろん、その場合には静止測定が行われるが、静止測定の場合、比較的長い路程の測定には、走行路の脇にその都度測定点を新たに設定し、較正し、測定を行わなければならない。この種の測定方法は、特に、連続作業する軌道建設機械の制御には不適である。何故なら、必要な場合には、走行路の伸長形態を予め定めた目標伸長形態に対して修正しなければならないからである。この種の軌道建設機械は、作業をできるだけ短時間かつ正確に実施するために、直接その作業区域内で走行路の実際の伸長形態をできるだけ連続的に実測するように指定されている。
【0003】
鉄道の軌道を保守するこの種の方法は、例えばEP−0559850によって既知である。この方法では、軌道上を走行可能な測定プラットホームが使用され、軌道の横に配置された基準点に対する測定プラットホームの位置変化の値が光学手段により検出される。これらの値は、位置データに変換され、記憶されている測定計画の目標値と比較される。両者の値の差が修正値としてプリセットされ、これらの修正値を、特定の軌道保守機械が利用して相応に軌道の伸長形態を修正することができる。その場合、好ましくは軌道保守機械の直接前方に連結できる単一の測定ベースにより、測定値が連続的に検出され、変換される。
【0004】
変換により軌道保守機械用の絶対値を得るためには、この測定プラットホームによる測定開始前に、その絶対位置を確定しなければならない。この位置確定のためには、測定の開始時に別に静止位置の検出が行われる。光学的な測定は、極めて高精度ではあるが、測定プラットホームと基準点との間を光学的に常時接続する必要があるため、どのような条件下でも可能とは限らない。このため、特に、霧などの環境の影響や、建設機械または作業員等による視界の遮断または妨害により測定誤差が生じたり、測定が全く不可能になることがある。
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の課題は、測定プラットホームの位置変化を、ひいては走行路の伸長形態を確実かつ正確に把握可能な測定方法であって、基準点との常時接続を要せず、したがって比較的長い区間または比較的長距離にわたって高精度で連続的に使用できる測定方法を提供することである。
【課題を解決するための手段】
【0006】
この課題は、本発明により、特許請求の範囲の請求項1の特徴部分に記載された方法によって解決される。請求項2から請求項10までには、好適実施形態が記載されている。
本発明によれば、絶対座標系を基準にした走行路目標位置を包括する走行路測定計画に基づいて走行路を測定する方法、それも、測定プラットホームを走行路に沿って走行させ、該測定プラットホームには慣性プラットホームが搭載され、該慣性プラットホームが、測定開始時に初期設定または較正されて座標系に整合され、かつ測定プラットホームの走行中、座標系に対する測定プラットホームのその時々の位置を検出する形式の方法の場合に、座標系に対する慣性プラットホームの位置データが自動点検され、座標系に対する偏差があれば、それを修正値として検出し、該修正値が、測定プラットホームの測定データまたは測定瞬間位置(Ist‐Position)の修正に使用される。
【0007】
周期的に座標系に対して較正される慣性プラットホーム、言い換えると、座標系に対して位置データが修正される慣性プラットホームを使用することにより、測定プラットホームの位置の推移を、連続的に極めて正確に検出し、記録することができる。慣性プラットホームの長所は、事実上、天候とは無関係に正確な値が得られ、何処でも使用できる点である。慣性プラットホームの位置データを座標系に対する有効位置により周期的に点検することによって、実際位置からの慣性プラットホームの偏差を、連続的かつ迅速に検出でき、位置データ計算時に修正値として顧慮することができる。
【0008】
慣性プラットホームの位置データの周期的チェックは、走行路脇に設けた固定点に対する測定プラットホーム位置を光学的に測定することで行うのが好ましい。それによって、その時々に測定プラットホームの瞬間位置を極めて正確に測定でき、その測定値から慣性プラットホーム位置に偏差があれば、その偏差が修正される。光学的な測定は、従来システムとは異なり、連続的に行う必要はなく、周期的に、決まった位置で行えばよいので、外的な影響、例えば固定点を見通す視界をさえぎる障害物などには事実上不感である。正確な測定成績が得られなければ、場合により、その測定は断念して、次の固定点で初めて測定または修正を行うこともできる。
【0009】
慣性プラットホームとしては、ジャイロ安定器付きプラットホームまたはレーザ・プラットホームを使用するのが好ましい。レーザ・プラットホームは、通常、ジャイロ安定器付きプラットホームよりも精度が高く、横振れがより小さい。言い換えると、較正後、瞬間位置からの偏差が、ジャイロ安定器つきプラットホームよりも小さい。しかし、ジャイロ安定器付きプラットホームは、その代わり調達価格がより安価であり、方向変化が僅かな走行路に用いるには十分な精度を有する。
測定プラットホームに、衛星ナビゲーション・システムを設け、慣性プラットホームの位置データを、このナビゲーション・システムの位置データと比較するのが好ましい。その場合、これらの位置データに偏差があれば、互いに修正位置データが計算され、記憶される。これにより、慣性プラットホームからの位置データを、2つの固定点間でも継続的に修正できるので、この方法の精度が全体として更に向上する。
【0010】
衛星ナビゲーション・システムの位置データも、同様に周期的に座標系に対するその有効位置をチェックされ、偏差があれば、それに応じて修正される。更に、衛星ナビゲーション・システムの位置データは、座標系に対して明確に位置決めされた第2のナビゲーション・システムの値をも考慮して修正され、それにより成績の精度を更に高めることができる。
慣性プラットホーム位置データの偏差が、或る固定点で検出された場合、これらの偏差は、それ以前に測定された複数固定点に線形に適用して修正するのが好ましい。既に検出され、記憶されている測定プラットホームの位置データは、或る固定点で偏差が確認された場合、後から修正することができる。その場合、修正は、前の固定点との距離に応じて好ましくは線形に位置データに適用される。それによって、例えば、座標系に対する、ひいては測定計画の目標伸張形態に対する走行路の実際の伸張形態が検出でき、必要であれば記録できる。
【0011】
測定プラットホームは、同じく走行路上を走行可能な、走行路の伸張形態に従う基準プラットホームに接続しておくのが好ましい。測定プラットホームに対する基準プラットホームの相対位置は、光学手段によって検出され、測定値または計算値の補完または修正に使用される。これらの付加的な相対基準プラットホームにより、例えば走行路の曲線半径は、きわめて正確に検出され、決定できる。このためには、2台の前後して配置され、一定間隔を置いて測定プラットホームと接続された基準プラットホームを使用するのが好ましい。
基準プラットホームは複数の光学反射器を具備し、測定プラットホームは少なくとも1機の光スキャナを具備するのが好ましい。この光スキャナは、光学的に反射器と通信し、極めて正確に複数反射器の角度偏差を、例えば測定プラットホームの長手方向軸線対して検出できる。したがって、測定プラットホームと基準プラットホームとの間の既知の幾何学的関係により、例えば走行路の曲線半径を極めて正確に決定できる。
【0012】
本発明による方法は、鉄道の軌道測定に使用できる。ほかでもない軌道の測定の場合には、特に、測定プラットホームの方向付けに関しては決まった状況が支配しているので、測定プラットホームは、正確に中心線の伸張形態を検出でき、かつ水平面に対する勾配の検出により2本の平行な軌条の伸張形態をも検出できる。
目標位置からの未処理位置データまたは修正位置データの偏差は、制御データとして、測定プラットホームに後続するか、または、直結される走行路加工機械に直接送られ、走行路が目標位置に一致せしめられる。好適には、測定プラットホームは、走行路加工機械の直前に連結されるか、走行路加工機械の上に配置または一体化されるかして、走行路加工機械を制御することで走行路の伸張形態を目標伸張形態に適合させる。これにより、走行路の連続的かつ迅速な加工が可能になる。このことは、ほかでもない鉄道の軌道の場合、特に重要である。なぜなら、鉄道の軌道の場合、加工は、通例、鉄道の運転休止時間中にしか行われず、しかも運転時間は長くなる一方で、休止時間は短縮される一方だからである。
【実施例1】
【0013】
以下、図面を見ながら、本発明方法の一実施例について詳細に説明する。
図1に、軌道1上に走行可能な測定プラットホーム2が模式的に示されている。測定プラットホーム2は、2車軸4,5を有する測定車3によって構成されている。
測定プラットホーム2上には、慣性プラットホーム6と、光学式スキャナ7と、衛星ナビゲーション・システム8とが配置されている。
慣性プラットホーム6からは、座標系を基準にした絶対位置データが得られるが、その場合、先ず慣性プラットホーム6の初期設定を行わなければならない。慣性プラットホーム6の初期設定の際、慣性プラットホームは、既知の、つまり測定または検出された測定プラットホーム絶対位置に基づいて、公知の形式で整合される。これにより、慣性プラットホーム6からは、軌道に沿った測定プラットホーム2または測定車3の走行時に座標系に対するその時々の実際位置のデータが提供される。
【0014】
慣性プラットホーム6としては、在来装置を使用できる。これら在来装置は、ジャイロ支持式プラットホームを有する機械式に作業する装置、または光学技術かレーザ技術に基づく事実上無摩耗の素子を含む装置である。初期設定以降の作業時間と、慣性プラットホーム6に及ぼされる運動および力とに依存して、位置データは、測定プラットホーム2の有効位置からの偏差を有している。通例、これらの偏差は、作業時間が長くなるにつれて増大し、誤った位置成績を生じさせる。このため、十分に正確な位置データを得るには、測定プラットホームの既知のまたは測定された位置データに基づいて慣性プラットホーム6の新たな周期的初期設定または較正を行うことが条件となる。
【0015】
この較正は、それぞれ軌道1の近くに配置するのが好ましい固定点9の近くで、そのつど自動的に行うことができる。これらの固定点は、例えば軌道の測定計画に含まれ正確に測定された固定点9でよく、例えば架線の支柱10に取り付けておく。測定車3の、したがって測定プラットホーム2の位置は、これらの固定点9に対する測定によって正確に決定できる。この測定は、測定プラットホーム2に配置または接続された光学式スキャナ7を介して行うのが好ましい。この種の光学式スキャナからは、自動化により極めて正確な測定成績を得ることができ、これらの測定成績に基づいて、測定車3の、したがって測定プラットホーム2の、座標系に対する実際の絶対位置が、公知の形式で決定できる。
このように測定された位置データと、慣性プラットホーム6から得られた位置データとの偏差は、直接、慣性プラットホームの有効偏差を示し、慣性プラットホーム6の較正に使用できる。
【0016】
2つの固定点9間で、慣性プラットホーム6から既に得た位置データの修正を行うために、付加的に測定プラットホーム2の位置が、衛星ナビゲーション・システム8の助けをかりて検出される。このナビゲーション・システム8により、慣性プラットホームと並列的に、同じように測定プラットホーム2の絶対位置データが得られる。慣性プラットホーム6とナビゲーション・システム8との位置データの偏差は、この場合、慣性プラットホーム6のずれまたは横振れを示唆する。これらの偏差の発生時には、この場合、慣性プラットホーム6の位置データを相応に修正することができる。
衛星ナビゲーション・システム8からも完全に正確な位置データは得られない。なぜなら、該位置データは、衛星11からの信号の受信品質に左右されるからである。このため、前記偏差は、慣性プラットホーム6の位置データ修正には、完全な値でではなく、或る一定の百分率で傾向値として使用するのが好ましい。
【0017】
図2は、本発明による測定方法の成績を示すグラフである。2つの固定点9または9´間には、測定計画に従って軌道1の目標伸張形態Sが破線で示されている。点Mは、軌道の実際の伸張形態上での測定車3の走行にもとづく位置測定の成績を示している。矢印Dは、慣性プラットホーム6の偏りまたは横振れの方向を示しているが、この偏りの方向は、軌道と平行方向を示していない。点M´からは、慣性プラットホーム6と衛生ナビゲーション・システム8との位置値間で検出された差に基づいて位置の値が修正され、これによって、図示の位置値推移が得られる。固定点9´のすぐ横で測定プラットホーム2の有効位置が既述のように決定され、慣性プラットホーム6の較正が行なわれるのが好ましい。点MまたはM´での位置値は既に修正済みであり、したがって有効位置からの偏差は最小化されているので、点M´´の較正位置では先行する点M´からの大きな偏差は認められない。
【0018】
したがって、本発明の方法により、測定点M,M´,M´´の全体として極めて高い質が達せられ、言い換えると、これらの点によって、軌道1の実際の伸張形態が正確に再現される。この方法は、例えば、軌道1の瞬間位置の正確な測定計画を作成するために使用できる。これらのデータは、また軌道建設機械の制御にも使用できる。該建設機械は、軌道1の位置を変更して、測定計画による目標位置に適合または修正することができる。
【0019】
衛星ナビゲーション・システム8の位置データ精度を高めるために、該データを、近辺に定置された第2衛星ナビゲーション・システム12の測定に基づいて修正できる。この修正信号は、第2ナビゲーション・システム12で検出された位置の値と、第2ナビゲーション・システム12の有効位置との差から得られ、受信機13を介して測定プラットホーム2の評価ユニット14へ送られる。評価ユニット内では、全ての他の計算も行われ、得られた値は記憶または記録される。
【0020】
図3に、また2つの固定点9,9´間の測定位置データまたは既述の方法で修正された位置データの推移が記録されている。目標伸張形態Sに対して2つの前後して続く測定点M1,M2の間隔Aは、軌道位置の誤差または偏差を示している。測定点Mnと較正測定点Mkとの間隔Dは、慣性プラットホーム6の累積した偏りまたは横振れを示している。いま例えば、測定プラットホーム2または測定車が、ほぼ一定速度で移動して、軌道の実際の伸張形態を記録する場合、言い換えると、測定走行を行う場合、2固定点9,9´間での慣性プラットホーム6の偏りまたは横振れが線形に生じたことを前提にできる。これにより、両固定点9,9´間で得られた位置の値は、図4に略示されているように、第1の固定点9との間隔に依存して前記偏り相応に後から線形に修正できる。このようにして修正された位置の値Mは、座標系内での軌道の実際の伸張形態を極めて正確に再現する。
【実施例2】
【0021】
図5に、本発明の方法を実施するための測定車3の別の例が示されている。測定車3は、この場合、2つの付加的な基準車15,16と連結されている。これらの基準車15,16は、それぞれ、光学反射器19または20と接続された基準車軸17,18を有しているのが好ましい。この場合、光学スキャナ21を用いて測定車3に対する基準車15または16の相対位置を把握できる。
図6の模式的平面図から分かるように、これらの情報、好ましくは角度情報は、例えば軌道1の曲線半径Rを決定するのに役立つ。基準車15または16は、特定の既知の間隔を置いて測定車3と連結されているので、曲線半径は周知の幾何学的関係に基づいて簡単に計算できる。
【0022】
本発明による測定方法は、レールまたは軌道1の場合に使用できるだけでなく、例えば道路にも使用できることは、当業者には明らかだろう。道路の場合には、測定車3は道路の中心線に沿って、場合により手動制御で走行させることで、対応する位置データを得ることができる。
【図面の簡単な説明】
【0023】
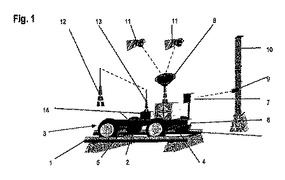
【図1】本発明方法を実施するための測定プラットホームの模式図。
【図2】衛星ナビゲーション・システムを取り入れて本発明方法の測定点の位置の推移を模式的に示す。
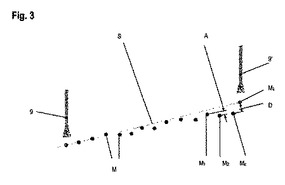
【図3】慣性プラットホームによる検出のみに基づいて測定点の推移を模式的に示す。
【図4】慣性プラットホームの確定された偏差に基づいて、図3の測定点の修正された推移を模式的に示す。
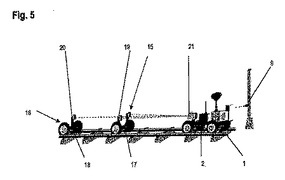
【図5】本発明の方法を実施するための、基準プラットホームを配属した測定プラットホームの模式図。
【図6】曲線走行路を通過する場合の、図5による測定配置の平面図。
【技術分野】
【0001】
本発明は、特許請求の範囲の請求項1の上位概念部分に記載された測定方法に関するものである。
【背景技術】
【0002】
走行路(例えば、道路や鉄道の軌道)の保守や新設の際、走行路の伸長形態が極めて精密に測定され、目標伸長形態と比較され、適切な軌道建設機械を用いて走行路の伸長形態に修正が加えられる。
基本的に、走行路の伸長形態は、走行路の外部から地理的な基準点に依拠して適切な測定手段を用いて極めて正確に測定できる。もちろん、その場合には静止測定が行われるが、静止測定の場合、比較的長い路程の測定には、走行路の脇にその都度測定点を新たに設定し、較正し、測定を行わなければならない。この種の測定方法は、特に、連続作業する軌道建設機械の制御には不適である。何故なら、必要な場合には、走行路の伸長形態を予め定めた目標伸長形態に対して修正しなければならないからである。この種の軌道建設機械は、作業をできるだけ短時間かつ正確に実施するために、直接その作業区域内で走行路の実際の伸長形態をできるだけ連続的に実測するように指定されている。
【0003】
鉄道の軌道を保守するこの種の方法は、例えばEP−0559850によって既知である。この方法では、軌道上を走行可能な測定プラットホームが使用され、軌道の横に配置された基準点に対する測定プラットホームの位置変化の値が光学手段により検出される。これらの値は、位置データに変換され、記憶されている測定計画の目標値と比較される。両者の値の差が修正値としてプリセットされ、これらの修正値を、特定の軌道保守機械が利用して相応に軌道の伸長形態を修正することができる。その場合、好ましくは軌道保守機械の直接前方に連結できる単一の測定ベースにより、測定値が連続的に検出され、変換される。
【0004】
変換により軌道保守機械用の絶対値を得るためには、この測定プラットホームによる測定開始前に、その絶対位置を確定しなければならない。この位置確定のためには、測定の開始時に別に静止位置の検出が行われる。光学的な測定は、極めて高精度ではあるが、測定プラットホームと基準点との間を光学的に常時接続する必要があるため、どのような条件下でも可能とは限らない。このため、特に、霧などの環境の影響や、建設機械または作業員等による視界の遮断または妨害により測定誤差が生じたり、測定が全く不可能になることがある。
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の課題は、測定プラットホームの位置変化を、ひいては走行路の伸長形態を確実かつ正確に把握可能な測定方法であって、基準点との常時接続を要せず、したがって比較的長い区間または比較的長距離にわたって高精度で連続的に使用できる測定方法を提供することである。
【課題を解決するための手段】
【0006】
この課題は、本発明により、特許請求の範囲の請求項1の特徴部分に記載された方法によって解決される。請求項2から請求項10までには、好適実施形態が記載されている。
本発明によれば、絶対座標系を基準にした走行路目標位置を包括する走行路測定計画に基づいて走行路を測定する方法、それも、測定プラットホームを走行路に沿って走行させ、該測定プラットホームには慣性プラットホームが搭載され、該慣性プラットホームが、測定開始時に初期設定または較正されて座標系に整合され、かつ測定プラットホームの走行中、座標系に対する測定プラットホームのその時々の位置を検出する形式の方法の場合に、座標系に対する慣性プラットホームの位置データが自動点検され、座標系に対する偏差があれば、それを修正値として検出し、該修正値が、測定プラットホームの測定データまたは測定瞬間位置(Ist‐Position)の修正に使用される。
【0007】
周期的に座標系に対して較正される慣性プラットホーム、言い換えると、座標系に対して位置データが修正される慣性プラットホームを使用することにより、測定プラットホームの位置の推移を、連続的に極めて正確に検出し、記録することができる。慣性プラットホームの長所は、事実上、天候とは無関係に正確な値が得られ、何処でも使用できる点である。慣性プラットホームの位置データを座標系に対する有効位置により周期的に点検することによって、実際位置からの慣性プラットホームの偏差を、連続的かつ迅速に検出でき、位置データ計算時に修正値として顧慮することができる。
【0008】
慣性プラットホームの位置データの周期的チェックは、走行路脇に設けた固定点に対する測定プラットホーム位置を光学的に測定することで行うのが好ましい。それによって、その時々に測定プラットホームの瞬間位置を極めて正確に測定でき、その測定値から慣性プラットホーム位置に偏差があれば、その偏差が修正される。光学的な測定は、従来システムとは異なり、連続的に行う必要はなく、周期的に、決まった位置で行えばよいので、外的な影響、例えば固定点を見通す視界をさえぎる障害物などには事実上不感である。正確な測定成績が得られなければ、場合により、その測定は断念して、次の固定点で初めて測定または修正を行うこともできる。
【0009】
慣性プラットホームとしては、ジャイロ安定器付きプラットホームまたはレーザ・プラットホームを使用するのが好ましい。レーザ・プラットホームは、通常、ジャイロ安定器付きプラットホームよりも精度が高く、横振れがより小さい。言い換えると、較正後、瞬間位置からの偏差が、ジャイロ安定器つきプラットホームよりも小さい。しかし、ジャイロ安定器付きプラットホームは、その代わり調達価格がより安価であり、方向変化が僅かな走行路に用いるには十分な精度を有する。
測定プラットホームに、衛星ナビゲーション・システムを設け、慣性プラットホームの位置データを、このナビゲーション・システムの位置データと比較するのが好ましい。その場合、これらの位置データに偏差があれば、互いに修正位置データが計算され、記憶される。これにより、慣性プラットホームからの位置データを、2つの固定点間でも継続的に修正できるので、この方法の精度が全体として更に向上する。
【0010】
衛星ナビゲーション・システムの位置データも、同様に周期的に座標系に対するその有効位置をチェックされ、偏差があれば、それに応じて修正される。更に、衛星ナビゲーション・システムの位置データは、座標系に対して明確に位置決めされた第2のナビゲーション・システムの値をも考慮して修正され、それにより成績の精度を更に高めることができる。
慣性プラットホーム位置データの偏差が、或る固定点で検出された場合、これらの偏差は、それ以前に測定された複数固定点に線形に適用して修正するのが好ましい。既に検出され、記憶されている測定プラットホームの位置データは、或る固定点で偏差が確認された場合、後から修正することができる。その場合、修正は、前の固定点との距離に応じて好ましくは線形に位置データに適用される。それによって、例えば、座標系に対する、ひいては測定計画の目標伸張形態に対する走行路の実際の伸張形態が検出でき、必要であれば記録できる。
【0011】
測定プラットホームは、同じく走行路上を走行可能な、走行路の伸張形態に従う基準プラットホームに接続しておくのが好ましい。測定プラットホームに対する基準プラットホームの相対位置は、光学手段によって検出され、測定値または計算値の補完または修正に使用される。これらの付加的な相対基準プラットホームにより、例えば走行路の曲線半径は、きわめて正確に検出され、決定できる。このためには、2台の前後して配置され、一定間隔を置いて測定プラットホームと接続された基準プラットホームを使用するのが好ましい。
基準プラットホームは複数の光学反射器を具備し、測定プラットホームは少なくとも1機の光スキャナを具備するのが好ましい。この光スキャナは、光学的に反射器と通信し、極めて正確に複数反射器の角度偏差を、例えば測定プラットホームの長手方向軸線対して検出できる。したがって、測定プラットホームと基準プラットホームとの間の既知の幾何学的関係により、例えば走行路の曲線半径を極めて正確に決定できる。
【0012】
本発明による方法は、鉄道の軌道測定に使用できる。ほかでもない軌道の測定の場合には、特に、測定プラットホームの方向付けに関しては決まった状況が支配しているので、測定プラットホームは、正確に中心線の伸張形態を検出でき、かつ水平面に対する勾配の検出により2本の平行な軌条の伸張形態をも検出できる。
目標位置からの未処理位置データまたは修正位置データの偏差は、制御データとして、測定プラットホームに後続するか、または、直結される走行路加工機械に直接送られ、走行路が目標位置に一致せしめられる。好適には、測定プラットホームは、走行路加工機械の直前に連結されるか、走行路加工機械の上に配置または一体化されるかして、走行路加工機械を制御することで走行路の伸張形態を目標伸張形態に適合させる。これにより、走行路の連続的かつ迅速な加工が可能になる。このことは、ほかでもない鉄道の軌道の場合、特に重要である。なぜなら、鉄道の軌道の場合、加工は、通例、鉄道の運転休止時間中にしか行われず、しかも運転時間は長くなる一方で、休止時間は短縮される一方だからである。
【実施例1】
【0013】
以下、図面を見ながら、本発明方法の一実施例について詳細に説明する。
図1に、軌道1上に走行可能な測定プラットホーム2が模式的に示されている。測定プラットホーム2は、2車軸4,5を有する測定車3によって構成されている。
測定プラットホーム2上には、慣性プラットホーム6と、光学式スキャナ7と、衛星ナビゲーション・システム8とが配置されている。
慣性プラットホーム6からは、座標系を基準にした絶対位置データが得られるが、その場合、先ず慣性プラットホーム6の初期設定を行わなければならない。慣性プラットホーム6の初期設定の際、慣性プラットホームは、既知の、つまり測定または検出された測定プラットホーム絶対位置に基づいて、公知の形式で整合される。これにより、慣性プラットホーム6からは、軌道に沿った測定プラットホーム2または測定車3の走行時に座標系に対するその時々の実際位置のデータが提供される。
【0014】
慣性プラットホーム6としては、在来装置を使用できる。これら在来装置は、ジャイロ支持式プラットホームを有する機械式に作業する装置、または光学技術かレーザ技術に基づく事実上無摩耗の素子を含む装置である。初期設定以降の作業時間と、慣性プラットホーム6に及ぼされる運動および力とに依存して、位置データは、測定プラットホーム2の有効位置からの偏差を有している。通例、これらの偏差は、作業時間が長くなるにつれて増大し、誤った位置成績を生じさせる。このため、十分に正確な位置データを得るには、測定プラットホームの既知のまたは測定された位置データに基づいて慣性プラットホーム6の新たな周期的初期設定または較正を行うことが条件となる。
【0015】
この較正は、それぞれ軌道1の近くに配置するのが好ましい固定点9の近くで、そのつど自動的に行うことができる。これらの固定点は、例えば軌道の測定計画に含まれ正確に測定された固定点9でよく、例えば架線の支柱10に取り付けておく。測定車3の、したがって測定プラットホーム2の位置は、これらの固定点9に対する測定によって正確に決定できる。この測定は、測定プラットホーム2に配置または接続された光学式スキャナ7を介して行うのが好ましい。この種の光学式スキャナからは、自動化により極めて正確な測定成績を得ることができ、これらの測定成績に基づいて、測定車3の、したがって測定プラットホーム2の、座標系に対する実際の絶対位置が、公知の形式で決定できる。
このように測定された位置データと、慣性プラットホーム6から得られた位置データとの偏差は、直接、慣性プラットホームの有効偏差を示し、慣性プラットホーム6の較正に使用できる。
【0016】
2つの固定点9間で、慣性プラットホーム6から既に得た位置データの修正を行うために、付加的に測定プラットホーム2の位置が、衛星ナビゲーション・システム8の助けをかりて検出される。このナビゲーション・システム8により、慣性プラットホームと並列的に、同じように測定プラットホーム2の絶対位置データが得られる。慣性プラットホーム6とナビゲーション・システム8との位置データの偏差は、この場合、慣性プラットホーム6のずれまたは横振れを示唆する。これらの偏差の発生時には、この場合、慣性プラットホーム6の位置データを相応に修正することができる。
衛星ナビゲーション・システム8からも完全に正確な位置データは得られない。なぜなら、該位置データは、衛星11からの信号の受信品質に左右されるからである。このため、前記偏差は、慣性プラットホーム6の位置データ修正には、完全な値でではなく、或る一定の百分率で傾向値として使用するのが好ましい。
【0017】
図2は、本発明による測定方法の成績を示すグラフである。2つの固定点9または9´間には、測定計画に従って軌道1の目標伸張形態Sが破線で示されている。点Mは、軌道の実際の伸張形態上での測定車3の走行にもとづく位置測定の成績を示している。矢印Dは、慣性プラットホーム6の偏りまたは横振れの方向を示しているが、この偏りの方向は、軌道と平行方向を示していない。点M´からは、慣性プラットホーム6と衛生ナビゲーション・システム8との位置値間で検出された差に基づいて位置の値が修正され、これによって、図示の位置値推移が得られる。固定点9´のすぐ横で測定プラットホーム2の有効位置が既述のように決定され、慣性プラットホーム6の較正が行なわれるのが好ましい。点MまたはM´での位置値は既に修正済みであり、したがって有効位置からの偏差は最小化されているので、点M´´の較正位置では先行する点M´からの大きな偏差は認められない。
【0018】
したがって、本発明の方法により、測定点M,M´,M´´の全体として極めて高い質が達せられ、言い換えると、これらの点によって、軌道1の実際の伸張形態が正確に再現される。この方法は、例えば、軌道1の瞬間位置の正確な測定計画を作成するために使用できる。これらのデータは、また軌道建設機械の制御にも使用できる。該建設機械は、軌道1の位置を変更して、測定計画による目標位置に適合または修正することができる。
【0019】
衛星ナビゲーション・システム8の位置データ精度を高めるために、該データを、近辺に定置された第2衛星ナビゲーション・システム12の測定に基づいて修正できる。この修正信号は、第2ナビゲーション・システム12で検出された位置の値と、第2ナビゲーション・システム12の有効位置との差から得られ、受信機13を介して測定プラットホーム2の評価ユニット14へ送られる。評価ユニット内では、全ての他の計算も行われ、得られた値は記憶または記録される。
【0020】
図3に、また2つの固定点9,9´間の測定位置データまたは既述の方法で修正された位置データの推移が記録されている。目標伸張形態Sに対して2つの前後して続く測定点M1,M2の間隔Aは、軌道位置の誤差または偏差を示している。測定点Mnと較正測定点Mkとの間隔Dは、慣性プラットホーム6の累積した偏りまたは横振れを示している。いま例えば、測定プラットホーム2または測定車が、ほぼ一定速度で移動して、軌道の実際の伸張形態を記録する場合、言い換えると、測定走行を行う場合、2固定点9,9´間での慣性プラットホーム6の偏りまたは横振れが線形に生じたことを前提にできる。これにより、両固定点9,9´間で得られた位置の値は、図4に略示されているように、第1の固定点9との間隔に依存して前記偏り相応に後から線形に修正できる。このようにして修正された位置の値Mは、座標系内での軌道の実際の伸張形態を極めて正確に再現する。
【実施例2】
【0021】
図5に、本発明の方法を実施するための測定車3の別の例が示されている。測定車3は、この場合、2つの付加的な基準車15,16と連結されている。これらの基準車15,16は、それぞれ、光学反射器19または20と接続された基準車軸17,18を有しているのが好ましい。この場合、光学スキャナ21を用いて測定車3に対する基準車15または16の相対位置を把握できる。
図6の模式的平面図から分かるように、これらの情報、好ましくは角度情報は、例えば軌道1の曲線半径Rを決定するのに役立つ。基準車15または16は、特定の既知の間隔を置いて測定車3と連結されているので、曲線半径は周知の幾何学的関係に基づいて簡単に計算できる。
【0022】
本発明による測定方法は、レールまたは軌道1の場合に使用できるだけでなく、例えば道路にも使用できることは、当業者には明らかだろう。道路の場合には、測定車3は道路の中心線に沿って、場合により手動制御で走行させることで、対応する位置データを得ることができる。
【図面の簡単な説明】
【0023】
【図1】本発明方法を実施するための測定プラットホームの模式図。
【図2】衛星ナビゲーション・システムを取り入れて本発明方法の測定点の位置の推移を模式的に示す。
【図3】慣性プラットホームによる検出のみに基づいて測定点の推移を模式的に示す。
【図4】慣性プラットホームの確定された偏差に基づいて、図3の測定点の修正された推移を模式的に示す。
【図5】本発明の方法を実施するための、基準プラットホームを配属した測定プラットホームの模式図。
【図6】曲線走行路を通過する場合の、図5による測定配置の平面図。
【特許請求の範囲】
【請求項1】
絶対座標系に対する走行路の目標位置を含む測定計画に基づいて走行路を測定する方法であって、測定プラットホーム(2)が走行路(1)に沿って走行し、前記測定プラットホームに慣性プラットホーム(6)が配置されており、該慣性プラットホームが、測定開始時に初期設定または較正され、かつ前記絶対座標系に対して整合せしめられ、更に前記測定プラットホーム(2)の走行中、前記慣性プラットホーム(6)が、前記絶対座標系に対するその時々の前記測定プラットホーム(2)の位置を検出する形式の、走行路の測定方法において、
前記絶対座標系に対する前記慣性プラットホーム(6)の位置データが周期的に自動点検され、前記絶対座標系に対する偏差発生時には、その偏差が、修正値として検出され、前記測定プラットホーム(2)の測定データまたは測定瞬間位置の修正に使用される、測定計画との関係で走行路を測定する方法。
【請求項2】
前記慣性プラットホーム(6)の位置データの周期的点検が、走行路の脇に配置された固定点(9,9´)に対する前記測定プラットホーム(2)の位置を光学的に測定することによって行われることを特徴とする請求項1に記載された走行路を測定する方法。
【請求項3】
前記慣性プラットホーム(6)として、ジャイロにより安定化されたプラットホームまたはレーザ・プラットホームが使用されることを特徴とする請求項1または請求項2に記載された走行路を測定する方法。
【請求項4】
前記測定プラットホーム(2)が、衛星ナビゲーション・システム(8)を有し、前記慣性プラットホーム(6)の位置データ(M)が、このナビゲーション・システムの位置データと比較され、しかも、これら位置データ(M)相互に偏差があれば、修正位置データ(M´)が計算され、修正値として記憶されることを特徴とする請求項1から請求項3までのいずれか1項に記載された走行路を測定する方法。
【請求項5】
前記衛星ナビゲーション・システム(8)の位置データも、同様に周期的に座標系に対する有効位置をチェックされ、偏差があれば、相応に修正されることを特徴とする請求項4に記載された走行路を測定する方法。
【請求項6】
1つの固定点(9,9´)で確認された、慣性プラットホーム(6)の位置データの偏差(A)が、修正のために、前に測定された固定点での位置データ(M)に線形に適用されることを特徴とする請求項1から請求項5までのいずれか1項に記載された方法。
【請求項7】
前記測定プラットホーム(2)が、同じように走行路を走行可能な、走行路の伸張形態に従う基準プラットホーム(15,16)と連結され、前記測定プラットホーム(2)に対する前記基準プラットホームの相対位置が、光学手段(21)によって検出され、測定値または計算値の補完または修正に使用されることを特徴とする請求項1から請求項6までのいずれか1項に記載された走行路を測定する方法。
【請求項8】
前記基準プラットホーム(15,16)が光学式反射器(19,20)を有し、測定プラットホーム(20)上に少なくとも1光スキャナ(21)が配置されていることを特徴とする請求項7に記載された走行路を測定する方法。
【請求項9】
鉄道用の軌道を測定するための方法である請求項1から請求項8までのいずれか1項に記載された走行路を測定する方法。
【請求項10】
目標位置からの未処理位置データまたは修正位置データ(M,M)の偏差が、測定プラットホーム(2)に後続するか、または、直接結合された走行路加工機械に、制御データとして直接送られ、走行路が目標位置に適合せしめられることを特徴とする請求項1から請求項9までのいずれか1項に記載された走行路を測定する方法。
【請求項1】
絶対座標系に対する走行路の目標位置を含む測定計画に基づいて走行路を測定する方法であって、測定プラットホーム(2)が走行路(1)に沿って走行し、前記測定プラットホームに慣性プラットホーム(6)が配置されており、該慣性プラットホームが、測定開始時に初期設定または較正され、かつ前記絶対座標系に対して整合せしめられ、更に前記測定プラットホーム(2)の走行中、前記慣性プラットホーム(6)が、前記絶対座標系に対するその時々の前記測定プラットホーム(2)の位置を検出する形式の、走行路の測定方法において、
前記絶対座標系に対する前記慣性プラットホーム(6)の位置データが周期的に自動点検され、前記絶対座標系に対する偏差発生時には、その偏差が、修正値として検出され、前記測定プラットホーム(2)の測定データまたは測定瞬間位置の修正に使用される、測定計画との関係で走行路を測定する方法。
【請求項2】
前記慣性プラットホーム(6)の位置データの周期的点検が、走行路の脇に配置された固定点(9,9´)に対する前記測定プラットホーム(2)の位置を光学的に測定することによって行われることを特徴とする請求項1に記載された走行路を測定する方法。
【請求項3】
前記慣性プラットホーム(6)として、ジャイロにより安定化されたプラットホームまたはレーザ・プラットホームが使用されることを特徴とする請求項1または請求項2に記載された走行路を測定する方法。
【請求項4】
前記測定プラットホーム(2)が、衛星ナビゲーション・システム(8)を有し、前記慣性プラットホーム(6)の位置データ(M)が、このナビゲーション・システムの位置データと比較され、しかも、これら位置データ(M)相互に偏差があれば、修正位置データ(M´)が計算され、修正値として記憶されることを特徴とする請求項1から請求項3までのいずれか1項に記載された走行路を測定する方法。
【請求項5】
前記衛星ナビゲーション・システム(8)の位置データも、同様に周期的に座標系に対する有効位置をチェックされ、偏差があれば、相応に修正されることを特徴とする請求項4に記載された走行路を測定する方法。
【請求項6】
1つの固定点(9,9´)で確認された、慣性プラットホーム(6)の位置データの偏差(A)が、修正のために、前に測定された固定点での位置データ(M)に線形に適用されることを特徴とする請求項1から請求項5までのいずれか1項に記載された方法。
【請求項7】
前記測定プラットホーム(2)が、同じように走行路を走行可能な、走行路の伸張形態に従う基準プラットホーム(15,16)と連結され、前記測定プラットホーム(2)に対する前記基準プラットホームの相対位置が、光学手段(21)によって検出され、測定値または計算値の補完または修正に使用されることを特徴とする請求項1から請求項6までのいずれか1項に記載された走行路を測定する方法。
【請求項8】
前記基準プラットホーム(15,16)が光学式反射器(19,20)を有し、測定プラットホーム(20)上に少なくとも1光スキャナ(21)が配置されていることを特徴とする請求項7に記載された走行路を測定する方法。
【請求項9】
鉄道用の軌道を測定するための方法である請求項1から請求項8までのいずれか1項に記載された走行路を測定する方法。
【請求項10】
目標位置からの未処理位置データまたは修正位置データ(M,M)の偏差が、測定プラットホーム(2)に後続するか、または、直接結合された走行路加工機械に、制御データとして直接送られ、走行路が目標位置に適合せしめられることを特徴とする請求項1から請求項9までのいずれか1項に記載された走行路を測定する方法。
【図1】

【図2】

【図3】
【図4】

【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2007−533878(P2007−533878A)
【公表日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願番号】特願2007−508703(P2007−508703)
【出願日】平成16年4月21日(2004.4.21)
【国際出願番号】PCT/CH2004/000241
【国際公開番号】WO2005/103385
【国際公開日】平成17年11月3日(2005.11.3)
【出願人】(506353286)
【Fターム(参考)】
【公表日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願日】平成16年4月21日(2004.4.21)
【国際出願番号】PCT/CH2004/000241
【国際公開番号】WO2005/103385
【国際公開日】平成17年11月3日(2005.11.3)
【出願人】(506353286)
【Fターム(参考)】
[ Back to top ]