
走行車とその走行制御方法
【課題】 3相誘導走行モータを備えた走行車を、目標速度パターンに従って走行させる。
【構成】 走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとにより、3相誘導走行モータの駆動用インバータを制御する。
【構成】 走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとにより、3相誘導走行モータの駆動用インバータを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は3相誘導モータを用いた走行車の走行制御に関する。
【背景技術】
【0002】
サーボモータを用いた走行車を目標速度パターンに従って走行させることが実現されている。例えば特許文献1:特開2000-99151Aは、在荷か空荷かにより、速度誤差に対するフィードバックゲインを変えることを開示している。しかしながら3相誘導モータを用いた、サーボ機構のない走行車に対する速度制御は未確立で、例えば目標速度に従って可変周波数で誘導モータを駆動する、あるいは目標速度と実際の速度との誤差に応じて加える周波数を制御する等のことが行われているに過ぎない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000-99151A
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明の課題は、3相誘導モータを走行モータに用い、サーボ機構の無い走行車を、目標速度に従って走行させることにある。
【課題を解決するための手段】
【0005】
この発明の走行車は、インバータにより3相誘導の走行モータを駆動する走行車であって、
走行車の目標速度のパターンを記憶するための手段と、走行モータの制御ゲインを速度毎に記憶するための手段とを設けると共に、記憶した目標速度と、速度毎の制御ゲインとにより前記インバータを制御するための手段を設けたことを特徴とする。
【0006】
この発明の走行車の走行制御方法は、インバータにより3相誘導の走行モータを駆動する走行車の走行制御方法であって、
走行車の目標速度のパターンと、走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとによりインバータを制御することを特徴とする。
【0007】
3相誘導モータでは、制御入力に対するモータの応答は非線形である。しかし速度毎に制御ゲインを定めると、目標速度からの偏差を解消するように、3相誘導モータを制御できる。そして目標速度に沿って走行車を走行させると、走行車の固有振動周波数を避けるように減速あるいは加減速ができるので、走行車の振動を抑制し、停止後物品を移載するまでの待ち時間を短くする、振動による物品への影響を小さくする、走行車の剛性を小さくできる、などの効果が得られる。
【0008】
好ましくは、走行車を少なくとも2種類の異なる制御ゲインで走行させることにより、目標速度からの誤差を求めて、誤差を解消するように制御ゲインを定めて記憶する。これによって、制御ゲインを簡単に定めることができる。
【図面の簡単な説明】
【0009】
【図1】実施例での走行モータの制御系を示す図
【図2】実施例のスタッカークレーンの制御系を示す図
【図3】実施例のゲインテーブルを示す図
【図4】目標速度に対するゲイン0とゲイン一定での速度波形を示す図
【図5】目標速度に対する誤差を示す図
【図6】実施例でのゲインテーブルの作成アルゴリズムを示す図
【図7】実施例でのインバータの制御アルゴリズムを示す図
【発明を実施するための形態】
【0010】
以下に本発明を実施するための最適実施例を示す。この発明の範囲は、特許請求の範囲の記載に基づき、明細書の記載とこの分野での周知技術とを参酌し、当業者の理解に従って定められるべきである。
【実施例】
【0011】
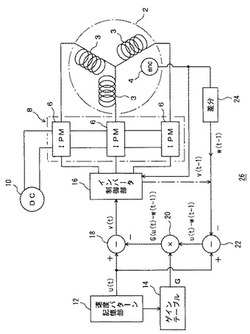
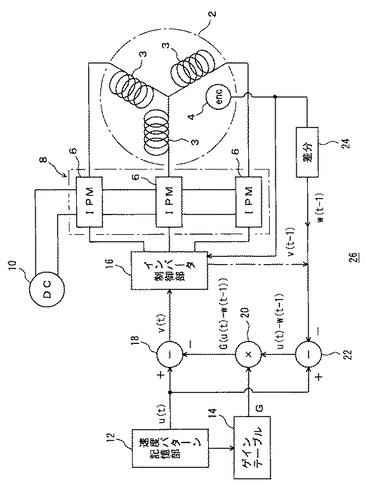
図1〜図7に、スタッカークレーンを例に実施例を示す。なお走行車の種類はスタッカークレーンに限らず、有軌道台車、天井走行車、無人搬送車などでもよい。図1は、スタッカークレーンの3相誘導の走行モータ2の制御系を示す。3相誘導走行モータ2は3個のコイル3並びにエンコーダ4を備え、各コイル毎のIPM(Intelligent・Power・Module)からの電力により駆動され、3個のIPM6はインバータ8を構成する。10はDC電源で、インバータ8とDC電源10とにより構成される、3相の可変周波数の交流電源により3相誘導走行モータ2を駆動する。
【0012】
12は速度パターン記憶部で、目標速度uを時間tの関数として記憶する。速度パターンには例えば加速用のパターンと減速用のパターンがあり、加速用のパターンと減速用のパターンとの間ではスタッカークレーンは定速で走行する。また短距離移動用と長距離移動用等で、2種類の速度パターンを記憶し、これらは最高速度が異なる。そして走行の目的地が指定されると、現在地からの距離に応じて長距離用または短距離用の速度パターンを読み出す。ゲインテーブル14は速度毎に制御ゲイン(以下単に「ゲイン」)を記憶したテーブルであり、メモリの例で、ここに速度は目標速度u(t)、現実の速度w(t)、あるいは制御速度v(t)のいずれでも良い。またゲインテーブル14は、加速用と減速用とで2種類のゲインを記憶しているが、例えば減速用のゲインのみを記憶してもよい。
【0013】
18は減算器、20は乗算器、22は減算器で、24は差分器である。インバータ制御部16は減算器18から入力される制御速度v(t)を周波数に変換し、IPM6を駆動する。差分器24はスタッカークレーンの実際の走行速度w(t-1)を求め、例えばエンコーダ4の信号を時間毎に差分することにより、走行速度w(t-1)を求める。減算器22は、速度パターン記憶部12から読み出した目標速度u(t)と、差分器24からの走行速度w(t-1)との差を求め、乗算器20でゲインを乗算し、減算器18で目標速度u(t)から減算することにより、制御速度v(t)を発生する。なお走行速度w(t-1)に代えて、単位時間前の制御速度v(t-1)と、目標速度u(t)との差を減算器22で求めても良い。
【0014】
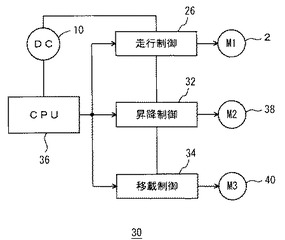
図2にスタッカークレーン30の制御系を示し、2は前記の3相誘導走行モータで、図1の走行制御部26により制御する。38は昇降モータで、マストに沿って図示しない昇降台を昇降させ、昇降制御部32で制御する。40は移載モータで、例えば昇降台に設けたスライドフォークあるいはスカラアームなどのモータで、移載制御部34により制御する。36は走行車CPUで、スタッカークレーン30の全体を制御すると共に、図示しない地上側コントローラとの間で通信する。この発明では3相誘導走行モータの制御ゲインを速度に応じて変更するが、昇降モータ38、移載モータ40も同様に補正しても良い。
【0015】
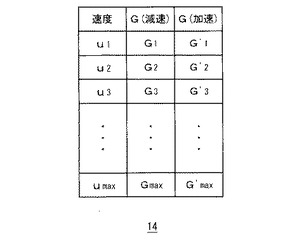
図3にゲインテーブル14の例を示し、例えば目標速度u1(最低速度)〜umax(最大速度)を見出しとして、減速時のゲインG1〜Gmaxと加速時のゲインG'1〜G'maxを記憶し、ゲインの値は一般に負である。前記のように加速時のゲインは記憶しなくてもよい。またテーブル14からデータを読み出す際に、目標速度u(t)を見出しとするか、制御速度v(t)を見出しとするか、走行速度w(t)(実際の速度)を見出しとするかは任意である。さらに在荷と空荷とで、ゲインテーブル14のデータを変えても良い。
【0016】
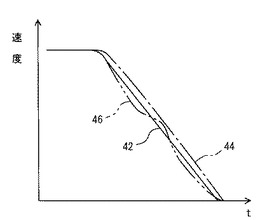
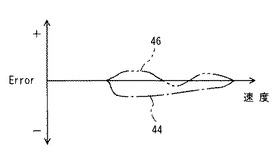
図4,図5にゲインテーブルの作成を示し、スタッカークレーンを制御ゲイン0と制御ゲインGを一定とした場合の2種類の制御条件で、速度パターン記憶部の速度パターン等に従って走行させる。実線の42は目標速度u(t)で、1点鎖線の44はゲイン0での走行速度で、2点鎖線の46はゲインGが一定の際の走行速度である。ゲイン0では走行速度は目標速度に比べて遅れ、ゲインが一定の場合、走行速度は目標速度に比べて遅れる場合も進む場合もある。走行速度44,46の目標速度からの誤差を図5に示す。本発明の基本的着眼点は、図5の速度44,46を内分あるいは外分することにより、誤差をほぼ0にできるゲインを求める点にある。
【0017】
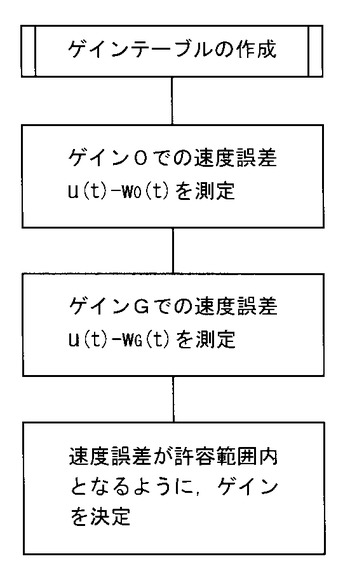
図6にゲインテーブルの作成を示し、速度毎にゲイン0での速度誤差とゲインG(一定)での速度誤差を測定し、速度誤差が許容範囲内となるようにゲインを決定する。ゲインの絶対値には上限があるので、速度誤差は0とすることが好ましいが、0の付近であればよい。テーブルには例えば3〜100程度に速度を区分し、好ましくは5〜20程度に速度を区分して、ゲインを記載する。また速度の区分毎のゲインを用いても、複数の速度に対してゲインを記憶し、記憶したゲインとゲインとの間では速度によりゲインを補間しても良い。さらにゲインは、在荷と空荷とで別の値を記憶しても良い。
【0018】
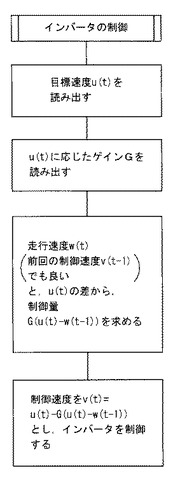
図7に実施例での3相誘導モータの制御を示し、目標速度を速度パターン記憶部から読み出し、目標速度等に応じたゲインをゲインテーブルから読み出す。走行速度w(t-1)と目標速度u(t)との差から制御量G(u(t)−w(t-1))を求める。なお走行速度w(t-1)に代えて、前回の制御速度v(t-1)を用い、制御量G(u(t)−v(t-1))等を求めても良い。そして今回の制御速度v(t)を u(t)−G(u(t)−w(t-1)) として定め、これに応じてIPM6を制御し、3相誘導モータに加える周波数を制御する。なおゲインGに目標速度u(t)と最高速度umaxとの比u(t)/umax等を乗算したものを用いても良い。
【0019】
このようにすると、サーボ機構無しで、即ちモータ電流のフィードバック制御なしで、目標速度に近い速度で、スタッカークレーンなどの走行車を走行させることができる。走行車では、目標速度u(t)に沿って加速並びに減速することにより、振動を小さくすることが重要である。特にスタッカークレーンの場合、減速時にマストが振動することが問題である。マストが振動すると、停止後振動が納まるまで移載が行えず、結果的に非効率になる。またマストの振動は物品に悪影響を与え、さらにスタッカークレーン全体の剛性を高める必要がある。スタッカークレーン以外の走行車の場合でも振動は好ましくなく、特に停止時の振動は、停止後移載を開始するまでの待ち時間に直結するので問題になる。
【0020】
振動には走行車の固有周波数が関係し、これには積み荷の有無なども関係する。従って速度パターン記憶部12には、空荷と在荷とに応じて、速度パターンを複数記憶させることが好ましい。そして走行車の固有振動数付近での加速や減速を避けることにより制振できるので、振動を避けるように目標速度パターンを決定する。そして制振を有効に行うために、走行車を目標速度パターンに従って走行させる。
【0021】
しかしながらサーボ機構のないモータで、単純なフィードバック制御を施すと、過制御あるいは制御不足などにより、目標速度に追随させることが難しい。これに対して実施例では、走行車の速度により変化するゲインで制御することにより、目標速度に従って走行させることができる。この結果、走行車の振動を抑制できる。
【符号の説明】
【0022】
2 3相誘導走行モータ
3 コイル
4 エンコーダ
6 IPM
8 インバータ
10 DC電源
12 速度パターン記憶部
14 ゲインテーブル
16 インバータ制御部
18〜22 演算器
26 走行制御部
30 スタッカークレーン
32 昇降制御部
34 移載制御部
36 走行車CPU
38 昇降モータ
40 移載モータ
42 目標速度
44 ゲイン0での走行速度
46 ゲインG(一定)での走行速度
【技術分野】
【0001】
この発明は3相誘導モータを用いた走行車の走行制御に関する。
【背景技術】
【0002】
サーボモータを用いた走行車を目標速度パターンに従って走行させることが実現されている。例えば特許文献1:特開2000-99151Aは、在荷か空荷かにより、速度誤差に対するフィードバックゲインを変えることを開示している。しかしながら3相誘導モータを用いた、サーボ機構のない走行車に対する速度制御は未確立で、例えば目標速度に従って可変周波数で誘導モータを駆動する、あるいは目標速度と実際の速度との誤差に応じて加える周波数を制御する等のことが行われているに過ぎない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000-99151A
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明の課題は、3相誘導モータを走行モータに用い、サーボ機構の無い走行車を、目標速度に従って走行させることにある。
【課題を解決するための手段】
【0005】
この発明の走行車は、インバータにより3相誘導の走行モータを駆動する走行車であって、
走行車の目標速度のパターンを記憶するための手段と、走行モータの制御ゲインを速度毎に記憶するための手段とを設けると共に、記憶した目標速度と、速度毎の制御ゲインとにより前記インバータを制御するための手段を設けたことを特徴とする。
【0006】
この発明の走行車の走行制御方法は、インバータにより3相誘導の走行モータを駆動する走行車の走行制御方法であって、
走行車の目標速度のパターンと、走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとによりインバータを制御することを特徴とする。
【0007】
3相誘導モータでは、制御入力に対するモータの応答は非線形である。しかし速度毎に制御ゲインを定めると、目標速度からの偏差を解消するように、3相誘導モータを制御できる。そして目標速度に沿って走行車を走行させると、走行車の固有振動周波数を避けるように減速あるいは加減速ができるので、走行車の振動を抑制し、停止後物品を移載するまでの待ち時間を短くする、振動による物品への影響を小さくする、走行車の剛性を小さくできる、などの効果が得られる。
【0008】
好ましくは、走行車を少なくとも2種類の異なる制御ゲインで走行させることにより、目標速度からの誤差を求めて、誤差を解消するように制御ゲインを定めて記憶する。これによって、制御ゲインを簡単に定めることができる。
【図面の簡単な説明】
【0009】
【図1】実施例での走行モータの制御系を示す図
【図2】実施例のスタッカークレーンの制御系を示す図
【図3】実施例のゲインテーブルを示す図
【図4】目標速度に対するゲイン0とゲイン一定での速度波形を示す図
【図5】目標速度に対する誤差を示す図
【図6】実施例でのゲインテーブルの作成アルゴリズムを示す図
【図7】実施例でのインバータの制御アルゴリズムを示す図
【発明を実施するための形態】
【0010】
以下に本発明を実施するための最適実施例を示す。この発明の範囲は、特許請求の範囲の記載に基づき、明細書の記載とこの分野での周知技術とを参酌し、当業者の理解に従って定められるべきである。
【実施例】
【0011】
図1〜図7に、スタッカークレーンを例に実施例を示す。なお走行車の種類はスタッカークレーンに限らず、有軌道台車、天井走行車、無人搬送車などでもよい。図1は、スタッカークレーンの3相誘導の走行モータ2の制御系を示す。3相誘導走行モータ2は3個のコイル3並びにエンコーダ4を備え、各コイル毎のIPM(Intelligent・Power・Module)からの電力により駆動され、3個のIPM6はインバータ8を構成する。10はDC電源で、インバータ8とDC電源10とにより構成される、3相の可変周波数の交流電源により3相誘導走行モータ2を駆動する。
【0012】
12は速度パターン記憶部で、目標速度uを時間tの関数として記憶する。速度パターンには例えば加速用のパターンと減速用のパターンがあり、加速用のパターンと減速用のパターンとの間ではスタッカークレーンは定速で走行する。また短距離移動用と長距離移動用等で、2種類の速度パターンを記憶し、これらは最高速度が異なる。そして走行の目的地が指定されると、現在地からの距離に応じて長距離用または短距離用の速度パターンを読み出す。ゲインテーブル14は速度毎に制御ゲイン(以下単に「ゲイン」)を記憶したテーブルであり、メモリの例で、ここに速度は目標速度u(t)、現実の速度w(t)、あるいは制御速度v(t)のいずれでも良い。またゲインテーブル14は、加速用と減速用とで2種類のゲインを記憶しているが、例えば減速用のゲインのみを記憶してもよい。
【0013】
18は減算器、20は乗算器、22は減算器で、24は差分器である。インバータ制御部16は減算器18から入力される制御速度v(t)を周波数に変換し、IPM6を駆動する。差分器24はスタッカークレーンの実際の走行速度w(t-1)を求め、例えばエンコーダ4の信号を時間毎に差分することにより、走行速度w(t-1)を求める。減算器22は、速度パターン記憶部12から読み出した目標速度u(t)と、差分器24からの走行速度w(t-1)との差を求め、乗算器20でゲインを乗算し、減算器18で目標速度u(t)から減算することにより、制御速度v(t)を発生する。なお走行速度w(t-1)に代えて、単位時間前の制御速度v(t-1)と、目標速度u(t)との差を減算器22で求めても良い。
【0014】
図2にスタッカークレーン30の制御系を示し、2は前記の3相誘導走行モータで、図1の走行制御部26により制御する。38は昇降モータで、マストに沿って図示しない昇降台を昇降させ、昇降制御部32で制御する。40は移載モータで、例えば昇降台に設けたスライドフォークあるいはスカラアームなどのモータで、移載制御部34により制御する。36は走行車CPUで、スタッカークレーン30の全体を制御すると共に、図示しない地上側コントローラとの間で通信する。この発明では3相誘導走行モータの制御ゲインを速度に応じて変更するが、昇降モータ38、移載モータ40も同様に補正しても良い。
【0015】
図3にゲインテーブル14の例を示し、例えば目標速度u1(最低速度)〜umax(最大速度)を見出しとして、減速時のゲインG1〜Gmaxと加速時のゲインG'1〜G'maxを記憶し、ゲインの値は一般に負である。前記のように加速時のゲインは記憶しなくてもよい。またテーブル14からデータを読み出す際に、目標速度u(t)を見出しとするか、制御速度v(t)を見出しとするか、走行速度w(t)(実際の速度)を見出しとするかは任意である。さらに在荷と空荷とで、ゲインテーブル14のデータを変えても良い。
【0016】
図4,図5にゲインテーブルの作成を示し、スタッカークレーンを制御ゲイン0と制御ゲインGを一定とした場合の2種類の制御条件で、速度パターン記憶部の速度パターン等に従って走行させる。実線の42は目標速度u(t)で、1点鎖線の44はゲイン0での走行速度で、2点鎖線の46はゲインGが一定の際の走行速度である。ゲイン0では走行速度は目標速度に比べて遅れ、ゲインが一定の場合、走行速度は目標速度に比べて遅れる場合も進む場合もある。走行速度44,46の目標速度からの誤差を図5に示す。本発明の基本的着眼点は、図5の速度44,46を内分あるいは外分することにより、誤差をほぼ0にできるゲインを求める点にある。
【0017】
図6にゲインテーブルの作成を示し、速度毎にゲイン0での速度誤差とゲインG(一定)での速度誤差を測定し、速度誤差が許容範囲内となるようにゲインを決定する。ゲインの絶対値には上限があるので、速度誤差は0とすることが好ましいが、0の付近であればよい。テーブルには例えば3〜100程度に速度を区分し、好ましくは5〜20程度に速度を区分して、ゲインを記載する。また速度の区分毎のゲインを用いても、複数の速度に対してゲインを記憶し、記憶したゲインとゲインとの間では速度によりゲインを補間しても良い。さらにゲインは、在荷と空荷とで別の値を記憶しても良い。
【0018】
図7に実施例での3相誘導モータの制御を示し、目標速度を速度パターン記憶部から読み出し、目標速度等に応じたゲインをゲインテーブルから読み出す。走行速度w(t-1)と目標速度u(t)との差から制御量G(u(t)−w(t-1))を求める。なお走行速度w(t-1)に代えて、前回の制御速度v(t-1)を用い、制御量G(u(t)−v(t-1))等を求めても良い。そして今回の制御速度v(t)を u(t)−G(u(t)−w(t-1)) として定め、これに応じてIPM6を制御し、3相誘導モータに加える周波数を制御する。なおゲインGに目標速度u(t)と最高速度umaxとの比u(t)/umax等を乗算したものを用いても良い。
【0019】
このようにすると、サーボ機構無しで、即ちモータ電流のフィードバック制御なしで、目標速度に近い速度で、スタッカークレーンなどの走行車を走行させることができる。走行車では、目標速度u(t)に沿って加速並びに減速することにより、振動を小さくすることが重要である。特にスタッカークレーンの場合、減速時にマストが振動することが問題である。マストが振動すると、停止後振動が納まるまで移載が行えず、結果的に非効率になる。またマストの振動は物品に悪影響を与え、さらにスタッカークレーン全体の剛性を高める必要がある。スタッカークレーン以外の走行車の場合でも振動は好ましくなく、特に停止時の振動は、停止後移載を開始するまでの待ち時間に直結するので問題になる。
【0020】
振動には走行車の固有周波数が関係し、これには積み荷の有無なども関係する。従って速度パターン記憶部12には、空荷と在荷とに応じて、速度パターンを複数記憶させることが好ましい。そして走行車の固有振動数付近での加速や減速を避けることにより制振できるので、振動を避けるように目標速度パターンを決定する。そして制振を有効に行うために、走行車を目標速度パターンに従って走行させる。
【0021】
しかしながらサーボ機構のないモータで、単純なフィードバック制御を施すと、過制御あるいは制御不足などにより、目標速度に追随させることが難しい。これに対して実施例では、走行車の速度により変化するゲインで制御することにより、目標速度に従って走行させることができる。この結果、走行車の振動を抑制できる。
【符号の説明】
【0022】
2 3相誘導走行モータ
3 コイル
4 エンコーダ
6 IPM
8 インバータ
10 DC電源
12 速度パターン記憶部
14 ゲインテーブル
16 インバータ制御部
18〜22 演算器
26 走行制御部
30 スタッカークレーン
32 昇降制御部
34 移載制御部
36 走行車CPU
38 昇降モータ
40 移載モータ
42 目標速度
44 ゲイン0での走行速度
46 ゲインG(一定)での走行速度
【特許請求の範囲】
【請求項1】
インバータにより3相誘導の走行モータを駆動する走行車であって、
走行車の目標速度のパターンを記憶するための手段と、走行モータの制御ゲインを速度毎に記憶するための手段とを設けると共に、記憶した目標速度と、速度毎の制御ゲインとにより前記インバータを制御するための手段を設けたことを特徴とする、走行車。
【請求項2】
インバータにより3相誘導の走行モータを駆動する走行車の走行制御方法であって、
走行車の目標速度のパターンと、走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとによりインバータを制御することを特徴とする、走行車の走行制御方法。
【請求項3】
走行車を少なくとも2種類の異なる制御ゲインで走行させることにより、目標速度からの誤差を求めて、誤差を解消するように制御ゲインを定めて記憶することを特徴とする、請求項2の走行車の走行制御方法。
【請求項1】
インバータにより3相誘導の走行モータを駆動する走行車であって、
走行車の目標速度のパターンを記憶するための手段と、走行モータの制御ゲインを速度毎に記憶するための手段とを設けると共に、記憶した目標速度と、速度毎の制御ゲインとにより前記インバータを制御するための手段を設けたことを特徴とする、走行車。
【請求項2】
インバータにより3相誘導の走行モータを駆動する走行車の走行制御方法であって、
走行車の目標速度のパターンと、走行モータの速度毎の制御ゲインとを記憶し、記憶した目標速度と速度毎の制御ゲインとによりインバータを制御することを特徴とする、走行車の走行制御方法。
【請求項3】
走行車を少なくとも2種類の異なる制御ゲインで走行させることにより、目標速度からの誤差を求めて、誤差を解消するように制御ゲインを定めて記憶することを特徴とする、請求項2の走行車の走行制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−93676(P2011−93676A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−250138(P2009−250138)
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]