
走行車システム
【課題】回生電力を有効活用することができる走行車システムを提供する。
【解決手段】複数の走行車100と、複数の走行車100の走行を制御するコントローラ300とを備える走行車システム10であって、複数の走行車100のそれぞれを電気的に接続するとともに、複数の走行車100のそれぞれに電力を供給する電力線210を備え、複数の走行車100のそれぞれは、電力線210を介して電力が供給されて駆動し複数の走行車100のそれぞれを走行させる走行モータ120を有するとともに、減速時に電力線210を介して他の走行車に供給する回生電力を発生させ、コントローラ300は、複数の走行車100のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。
【解決手段】複数の走行車100と、複数の走行車100の走行を制御するコントローラ300とを備える走行車システム10であって、複数の走行車100のそれぞれを電気的に接続するとともに、複数の走行車100のそれぞれに電力を供給する電力線210を備え、複数の走行車100のそれぞれは、電力線210を介して電力が供給されて駆動し複数の走行車100のそれぞれを走行させる走行モータ120を有するとともに、減速時に電力線210を介して他の走行車に供給する回生電力を発生させ、コントローラ300は、複数の走行車100のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の走行車と当該複数の走行車の走行を制御するコントローラとを備える走行車システムに関する。
【背景技術】
【0002】
近年、物品を搬送する搬送台車のような走行車を複数備え、当該複数の走行車をコントローラで制御する走行車システムが広く実用化されている。このような走行車システムは、複数の走行車すべてを走行させるために、すべての走行車の消費電力の総和をもとに電源設備の容量を計画する必要があり、大きい容量の電源設備が必要である。
【0003】
このため、従来、走行車の減速時に発生する回生電力を補助電源に充電する走行車システムが提案されている(例えば、特許文献1参照)。これにより、補助電源に充電された電力を活用することで、電源設備の容量を低減することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−81219号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の走行車システムでは、回生電力が有効に活用することができないという問題がある。
【0006】
つまり、従来の走行車システムでは、回生電力を補助電源に充電してから放電して使用するので、充電及び放電において電力のロスが生じる。このため、発生した回生電力から当該ロスを差し引いた量の電力しか、活用することができない。
【0007】
そこで、本発明は、このような問題に鑑みてなされたものであり、回生電力を有効活用することができる走行車システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る走行車システムは、複数の走行車と、前記複数の走行車の走行を制御するコントローラとを備える走行車システムであって、前記複数の走行車のそれぞれを電気的に接続するとともに、前記複数の走行車のそれぞれに電力を供給する電力線を備え、前記複数の走行車のそれぞれは、前記電力線を介して電力が供給されて駆動し前記複数の走行車のそれぞれを走行させるモータを有するとともに、減速時に、前記電力線を介して他の走行車に供給する回生電力を発生させ、前記コントローラは、前記複数の走行車のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、前記複数の走行車のうちの少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0009】
これによれば、第一走行車が減速している時刻と第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。つまり、第一走行車が減速する時刻と第二走行車が加速する時刻とを同期させることで、第一走行車の減速により発生した回生電力を、第二走行車の加速に使用することができる。このため、回生電力の充放電によるロスなどが生じることがなく、回生電力を有効活用することができる。
【0010】
また、好ましくは、前記コントローラは、前記第二走行車の台数が所定の第一台数以下になるように、前記複数の走行車の走行を制御する。
【0011】
これによれば、第二走行車の台数が所定の台数以下になるように、複数の走行車の走行を制御する。つまり、加速する走行車の数を所定の台数以下に制限する。これにより、走行車の加速によってピーク電力が増加するのを抑制することができるので、電源設備の容量を低減することができる。
【0012】
また、好ましくは、前記コントローラは、前記第一走行車の台数が前記第二走行車の台数よりも多くなる場合に、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0013】
これによれば、第一走行車の台数が第二走行車の台数よりも多くなる場合に、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。つまり、減速する走行車の台数が加速する走行車の台数よりも多くなる場合に、走行車の減速により発生した回生電力を、走行車の加速に使用する。これにより、走行車の加速に多くの回生電力を使用することができるので、回生電力を有効活用して、走行車の加速により使用する電力の増加を抑制することができる。
【0014】
また、好ましくは、前記複数の走行車のそれぞれは、さらに、前記モータを駆動させて前記複数の走行車のそれぞれの位置決めを行うことができるドライバを有し、前記走行車システムは、さらに、前記コントローラとそれぞれの前記ドライバとを接続する通信線を備え、前記コントローラは、前記通信線を介して、前記ドライバに前記モータを駆動させることで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0015】
これによれば、通信線を介して、ドライバにモータを駆動させることで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。このため、サーボアンプなどのドライバにモータを駆動させる信号を送ることで、容易に、複数の走行車の走行を制御することができる。
【0016】
また、好ましくは、前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第一走行車の減速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0017】
これによれば、ドライバが取得したモータのトルク値から、第一走行車の減速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。このため、当該トルク値を用いることで、走行車の減速状態を確認することができるので、容易に、複数の走行車の走行を制御することができる。
【0018】
また、好ましくは、前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第二走行車の加速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0019】
これによれば、ドライバが取得したモータのトルク値から、第二走行車の加速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。このため、当該トルク値を用いることで、走行車の加速状態を確認することができるので、容易に、複数の走行車の走行を制御することができる。
【0020】
また、好ましくは、前記コントローラは、前記第一走行車が減速して回生電力を発生する予定を予測することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記第二走行車に加速を待機させる。
【0021】
これによれば、第一走行車が減速して回生電力を発生する予定を予測することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、第二走行車に加速を待機させる。このため、回生電力を発生する予定時刻を予測することで、容易に、複数の走行車の走行を制御することができる。
【0022】
また、好ましくは、前記コントローラは、前記複数の走行車のうちの定速で走行中の走行車の台数が所定の第二台数以上の場合に、前記走行中の走行車が減速して回生電力を発生する予定であると予測し、前記第二走行車に加速を待機させる。
【0023】
これによれば、定速で走行中の走行車の台数が所定の台数以上の場合に、走行中の走行車が減速して回生電力を発生する予定であると予測し、第二走行車に加速を待機させる。つまり、定速で走行中の走行車の台数が多い場合は、当該定速で走行中の走行車が順次減速していくことが予測されるため、当該走行車の減速により発生するであろう回生電力を有効活用するために、第二走行車に加速を待機させる。これにより、回生電力を有効活用して、走行車の加速により使用する電力の増加を抑制することができる。
【0024】
また、本発明は、このような走行車システムとして実現することができるだけではなく、走行車システムの制御装置に含まれる特徴的な処理をステップとする走行車システムの制御方法として実現したり、そのような特徴的なステップをコンピュータに実行させるプログラムとして実現したりすることもできる。そして、そのようなプログラムは、CD−ROM等の記録媒体及びインターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【発明の効果】
【0025】
本発明に係る走行車システムによれば、回生電力を有効活用することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の実施の形態における走行車システムを模式的に示す斜視図である。
【図2】本発明の実施の形態における走行車システムの構成を示すブロック図である。
【図3】本発明の実施の形態におけるコントローラが行う動作の一例を示すフローチャートである。
【図4】本発明の実施の形態におけるコントローラがピーク電力を低減する処理を行う動作の一例を示すフローチャートである。
【図5】本発明の実施の形態におけるコントローラが行う走行車の走行状態の確認処理を説明する図である。
【図6】本発明の実施の形態におけるコントローラが消費電力を低減する処理を行う動作の一例を示すフローチャートである。
【図7】本発明の実施の形態におけるコントローラが消費電力を低減する処理を行う動作の他の一例を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について図面を用いて詳細に説明する。
【0028】
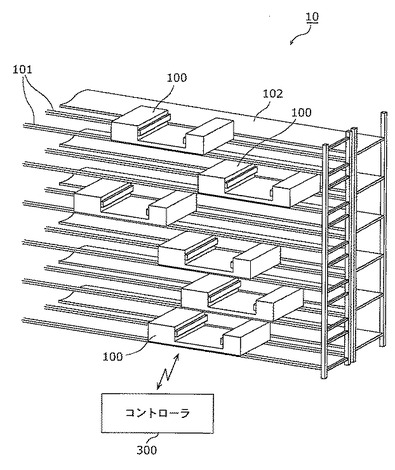
図1は、本発明の実施の形態における走行車システム10を模式的に示す斜視図である。
【0029】
同図に示すように、走行車システム10は、走行経路に沿って設けられるラック102に対し、物品を移載するための走行車100を複数台備えるシステムであって、複数の走行車100とコントローラ300とを備えている。
【0030】
走行車100は、走行経路を形成するレール101に沿って往復動することで、載置された物品をラック102に対し移載する搬送台車である。コントローラ300は、複数の走行車100の走行を制御する装置である。なお、走行車100及びコントローラ300の詳細な説明については、後述する。
【0031】
図2は、本発明の実施の形態における走行車システム10の構成を示すブロック図である。
【0032】
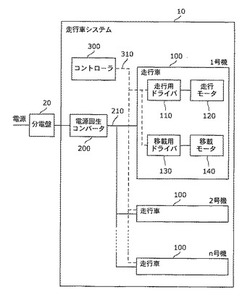
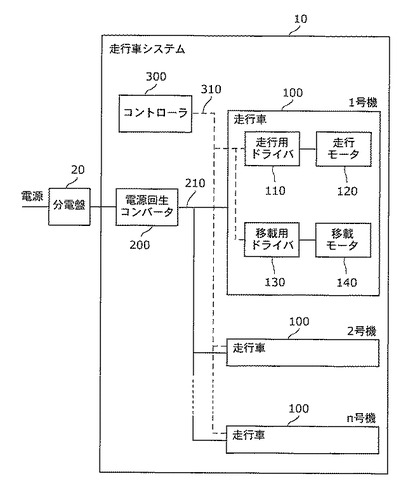
同図に示すように、走行車システム10は、図1に示された複数の走行車100及びコントローラ300の他に、電源回生コンバータ200、電力線210及び通信線310を備えている。
【0033】
電源回生コンバータ200は、分電盤20から交流電力を受電し、受電した交流電力を直流電力に変換して、電力線210を介して、複数の走行車100のそれぞれに当該直流電力を供給する。
【0034】
電力線210は、複数の走行車100のそれぞれを電気的に接続するとともに、複数の走行車100のそれぞれに電力を供給するための電力線である。
【0035】
複数の走行車100(同図では、1号機〜n号機のn台の走行車)のそれぞれは、電力線210を介して供給される電力によって走行する。また、複数の走行車100のそれぞれは、減速時に、電力線210を介して他の走行車に供給する回生電力を発生させる。つまり、発生した回生電力は、他の走行車100の走行に利用される。
【0036】
ここで、当該複数の走行車100のそれぞれは、走行用ドライバ110、走行モータ120、移載用ドライバ130及び移載モータ140を備えている。
【0037】
走行モータ120は、電力線210を介して電力が供給されて駆動し、走行車100を走行させるサーボモータなどのモータである。
【0038】
走行用ドライバ110は、走行モータ120を駆動させて、走行車100の走行位置の位置決めを行うことができる走行用のサーボアンプなどのドライバである。走行用ドライバ110は、走行モータ120のトルク値を取得することができる。
【0039】
移載モータ140は、電力線210を介して電力が供給されて駆動し、物品を移載する移載装置(図示せず)を動作させるサーボモータなどのモータである。
【0040】
移載用ドライバ130は、移載モータ140を駆動させて、当該移載装置の移載位置の位置決めを行うことができる移載用のサーボアンプなどのドライバである。
【0041】
コントローラ300は、複数の走行車100を集中制御する。具体的には、コントローラ300は、通信線310を介して、複数の走行車100のそれぞれの走行用ドライバ110及び移載用ドライバ130に、走行モータ120及び移載モータ140を駆動させることで、複数の走行車100の走行及び物品の移載を制御する。
【0042】
また、コントローラ300は、複数の走行車100のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、複数の走行車100のうちの少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。
【0043】
例えば、コントローラ300は、1号機の走行車100が減速している時刻と2号機の走行車100が加速している時刻とが重複するように、1号機及び2号機の走行車100の走行を制御する。なお、コントローラ300が複数の走行車100の走行を制御する処理の詳細については、後述する。
【0044】
通信線310は、コントローラ300と複数の走行車100それぞれの走行用ドライバ110及び移載用ドライバ130とを接続する通信線である。
【0045】
ここで、コントローラ300と、複数の走行車100それぞれの走行用ドライバ110及び移載用ドライバ130との間では、CC−Link(Control & Communication Link)などのフィールドネットワークなどによって、高速通信が行われる。これにより、コントローラ300と各走行車100との間で、リアルタイムに情報の伝達を行うことができる。
【0046】
次に、コントローラ300が複数の走行車100の走行を制御する処理の詳細について、説明する。
【0047】
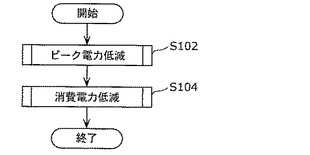
図3は、本発明の実施の形態におけるコントローラ300が行う動作の一例を示すフローチャートである。
【0048】
同図に示すように、まず、コントローラ300は、複数の走行車100の走行に使用される電力について、ピーク電力を低減する処理を行う(S102)。具体的には、コントローラ300は、同時に加速する走行車100の台数を抑制することで、ピーク電力を低減する。このピーク電力を低減する処理の詳細については、後述する。
【0049】
そして、コントローラ300は、複数の走行車100の走行に使用される電力について、消費電力を低減する処理を行う(S104)。具体的には、コントローラ300は、走行車100が減速している時刻と他の走行車100が加速している時刻とが重複するように、複数の走行車100の走行を制御することで、消費電力を低減する。この消費電力を低減する処理の詳細については、後述する。
【0050】
まず、コントローラ300がピーク電力を低減する処理(図3のS102)の詳細について、説明する。
【0051】
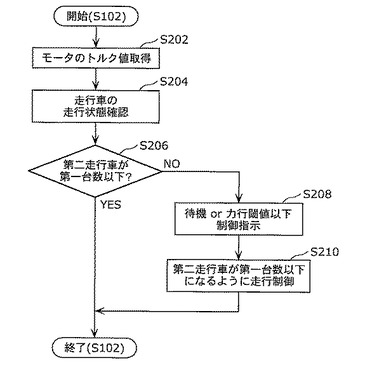
図4は、本発明の実施の形態におけるコントローラ300がピーク電力を低減する処理を行う動作の一例を示すフローチャートである。
【0052】
同図に示すように、まず、コントローラ300は、走行用ドライバ110から、走行モータ120のトルク値を取得する(S202)。
【0053】
そして、コントローラ300は、走行車100の走行状態を確認する(S204)。
【0054】
ここで、以下に、コントローラ300が行う走行車100の走行状態の確認処理について、説明する。
【0055】
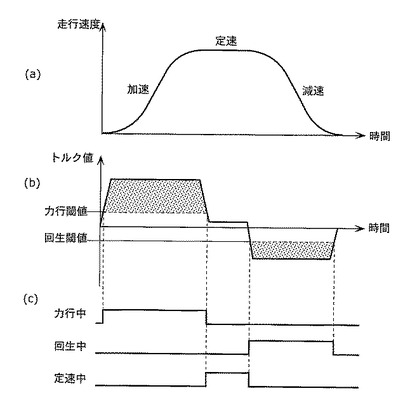
図5は、本発明の実施の形態におけるコントローラ300が行う走行車100の走行状態の確認処理を説明する図である。
【0056】
同図の(a)に示すように、走行車100が加速、定速及び減速を行うように走行することとする。
【0057】
そして、走行車100が加速中は、同図の(b)に示すように、走行モータ120のトルク値は上昇し、所定の力行閾値を超える。この場合、同図の(c)に示すように、コントローラ300は、走行車100の走行状態が加速状態(力行中)であるとして、走行車100の走行状態を確認する。つまり、この場合の走行車100の走行状態においては、走行車100は電力を使用している。
【0058】
ここで、走行モータ120のトルク値にはノイズが含まれるため、コントローラ300は、当該トルク値が所定の力行閾値を超える場合に、走行車100が力行中であると判断する。なお、力行閾値はどのような値であってもよいし、力行閾値を設けなくてもよい。
【0059】
また、走行車100が定速中は、同図の(b)に示すように、走行モータ120のトルク値は一定である。この場合、同図の(c)に示すように、コントローラ300は、走行車100の走行状態が定速状態(定速中)であるとして、走行車100の走行状態を確認する。
【0060】
また、走行車100が減速中は、同図の(b)に示すように、走行モータ120のトルク値は下降し、所定の回生閾値を下回る。この場合、同図の(c)に示すように、コントローラ300は、走行車100の走行状態が減速状態(回生中)であるとして、走行車100の走行状態を確認する。つまり、この場合の走行車100の走行状態においては、走行車100は回生電力を発生している。
【0061】
ここで、走行モータ120のトルク値にはノイズが含まれるため、コントローラ300は、当該トルク値が所定の回生閾値を下回る場合に、走行車100が回生中であると判断する。なお、回生閾値はどのような値であってもよいし、回生閾値を設けなくてもよい。
【0062】
図4に戻り、コントローラ300は、走行車100の走行状態の確認結果から、加速する走行車100である第二走行車の台数が、所定の第一台数以下か否かを判断する(S206)。なお、この所定の第一台数は、抑制したいピーク電力の値によってユーザにより定められる値であり、特に限定されない。
【0063】
そして、コントローラ300は、第二走行車の台数が所定の第一台数以下であると判断した場合は(S206でYES)、処理を終了する。
【0064】
また、コントローラ300は、第二走行車の台数が所定の第一台数以下でないと判断した場合は(S206でNO)、加速予定の他の走行車100を待機させる、または走行モータ120のトルク値が力行閾値以下になるように、加速予定の他の走行車100を制御する(S208)。
【0065】
そして、コントローラ300は、第二走行車の台数が所定の第一台数以下になるように、第二走行車の走行を制御する(S210)。このようにして、コントローラ300は、加速する走行車100の台数を低減させることで、ピーク電力を低減することができる。
【0066】
以上により、コントローラ300がピーク電力を低減する処理(図3のS102)は、終了する。
【0067】
次に、コントローラ300が消費電力を低減する処理(図3のS104)の詳細について、説明する。
【0068】
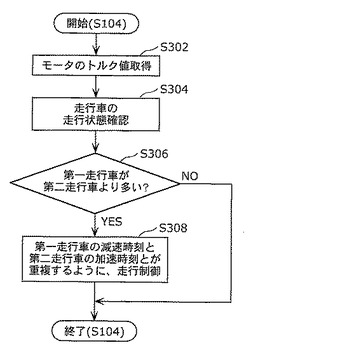
図6は、本発明の実施の形態におけるコントローラ300が消費電力を低減する処理を行う動作の一例を示すフローチャートである。
【0069】
同図に示すように、まず、コントローラ300は、走行用ドライバ110から、走行モータ120のトルク値を取得する(S302)。
【0070】
そして、コントローラ300は、走行車100の走行状態を確認する(S304)。つまり、コントローラ300は、走行用ドライバ110が取得した走行モータ120のトルク値から、減速中の走行車100が減速状態であると判断し、加速中の走行車100が加速状態であると判断することで、走行車100の走行状態を確認する。なお、このコントローラ300が行う走行車100の走行状態の確認処理は、図4で説明した処理(図4のS204)と同様であるため、詳細な説明は省略する。
【0071】
次に、コントローラ300は、走行車100の走行状態の確認結果から、減速する走行車100である第一走行車の台数が、加速する走行車100である第二走行車の台数よりも多いか否かを判断する(S306)。
【0072】
そして、コントローラ300は、第一走行車の台数が第二走行車の台数以下であると判断した場合は(S306でNO)、処理を終了する。
【0073】
また、コントローラ300は、第一走行車の台数が第二走行車の台数よりも多いと判断した場合は(S306でYES)、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、第一走行車及び第二走行車の走行を制御する(S308)。このようにして、コントローラ300は、第一走行車が発生する回生電力を第二走行車の走行に活用することで、消費電力を低減することができる。
【0074】
また、コントローラ300が消費電力を低減する処理(図3のS104)の他の一例について、説明する。
【0075】
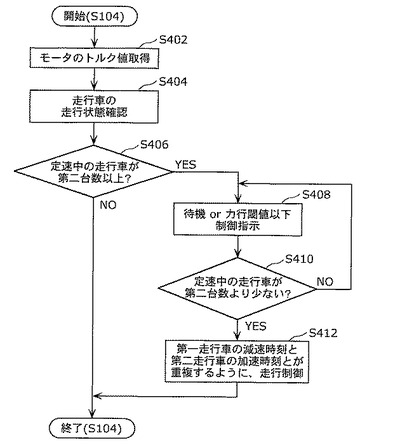
図7は、本発明の実施の形態におけるコントローラ300が消費電力を低減する処理を行う動作の他の一例を示すフローチャートである。
【0076】
同図に示すように、まず、コントローラ300は、走行用ドライバ110から、走行モータ120のトルク値を取得する(S402)。
【0077】
そして、コントローラ300は、走行車100の走行状態を確認する(S404)。なお、このコントローラ300が行う走行車100の走行状態の確認処理は、図4及び図6で説明した処理(図4のS204及び図6のS304)と同様であるため、詳細な説明は省略する。
【0078】
次に、コントローラ300は、走行車100の走行状態の確認結果から、複数の走行車100のうちの定速で走行中の走行車100の台数が所定の第二台数以上であるか否かを判断する(S406)。なお、この所定の第二台数は、抑制したい消費電力の値によってユーザにより定められる値であり、特に限定されない。
【0079】
そして、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数よりも少ないと判断した場合は(S406でNO)、処理を終了する。
【0080】
また、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数以上であると判断した場合は(S406でYES)、走行中の走行車100が減速して回生電力を発生する予定であると予測し、加速予定の他の走行車100を待機させる、または走行モータ120のトルク値が力行閾値以下になるように、加速予定の他の走行車100を制御する(S408)。
【0081】
そして、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数よりも少なくなったか否かを判断する(S410)。
【0082】
コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数以上であると判断した場合は(S410でNO)、再度、加速予定の他の走行車100を待機させる、または走行モータ120のトルク値が力行閾値以下になるように、加速予定の他の走行車100を制御する(S408)。
【0083】
また、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数よりも少なくなったと判断した場合は(S410でYES)、定速で走行していた走行車100が減速し始めたと判断し、減速する走行車100である第一走行車が減速している時刻と、加速する走行車100である第二走行車が加速している時刻とが重複するように、第一走行車及び第二走行車の走行を制御する(S412)。
【0084】
このように、コントローラ300は、定速で走行中の走行車100が減速して回生電力を発生する予定を予測することで、当該定速で走行中の走行車100が減速するまで、他の走行車100に加速を待機させる。これにより、第一走行車が発生する回生電力を第二走行車の走行に活用することで、消費電力を低減することができる。
【0085】
以上により、コントローラ300が消費電力を低減する処理(図3のS104)は、終了する。
【0086】
以上のように、本発明に係る走行車システム10によれば、第一走行車が減速している時刻と第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。つまり、第一走行車が減速する時刻と第二走行車が加速する時刻とを同期させることで、第一走行車の減速により発生した回生電力を、第二走行車の加速に使用することができる。このため、回生電力の充放電によるロスなどが生じることがなく、回生電力を有効活用することができる。また、走行車100に回生電力を充電する機器を設置する必要がないため、走行車100の小型軽量化を図ることができる。
【0087】
また、第二走行車の台数が所定の台数以下になるように、複数の走行車100の走行を制御する。つまり、加速する走行車100の数を所定の台数以下に制限する。これにより、走行車100の加速によってピーク電力が増加するのを抑制することができるので、電源設備の容量を低減することができる。
【0088】
また、第一走行車の台数が第二走行車の台数よりも多くなる場合に、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。つまり、減速する走行車100の台数が加速する走行車100の台数よりも多くなる場合に、走行車100の減速により発生した回生電力を、走行車100の加速に使用する。これにより、走行車100の加速に多くの回生電力を使用することができるので、回生電力を有効活用して、走行車100の加速により使用する電力の増加を抑制することができる。
【0089】
また、通信線310を介して、走行用ドライバ110に走行モータ120を駆動させることで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。このため、サーボアンプなどの走行用ドライバ110に走行モータ120を駆動させる信号を送ることで、容易に、複数の走行車100の走行を制御することができる。
【0090】
また、走行用ドライバ110が取得した走行モータ120のトルク値から、第一走行車の減速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。このため、当該トルク値を用いることで、走行車100の減速状態を確認することができるので、容易に、複数の走行車100の走行を制御することができる。
【0091】
また、走行用ドライバ110が取得した走行モータ120のトルク値から、第二走行車の加速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。このため、当該トルク値を用いることで、走行車100の加速状態を確認することができるので、容易に、複数の走行車100の走行を制御することができる。
【0092】
また、第一走行車が減速して回生電力を発生する予定を予測することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、第二走行車に加速を待機させる。このため、回生電力を発生する予定時刻を予測することで、容易に、複数の走行車100の走行を制御することができる。
【0093】
また、定速で走行中の走行車100の台数が所定の台数以上の場合に、走行中の走行車100が減速して回生電力を発生する予定であると予測し、第二走行車に加速を待機させる。つまり、定速で走行中の走行車100の台数が多い場合は、当該定速で走行中の走行車100が順次減速していくことが予測されるため、当該走行車100の減速により発生するであろう回生電力を有効活用するために、第二走行車に加速を待機させる。これにより、回生電力を有効活用して、走行車100の加速により使用する電力の増加を抑制することができる。
【0094】
以上、本発明に係る走行車システム10について、実施の形態に基づいて説明したが、本発明は、この実施の形態に限定されるものではない。
【0095】
つまり、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【0096】
例えば、本実施の形態では、コントローラ300は、ピーク電力及び消費電力を低減する処理を行うこととしたが、コントローラ300は、常に当該処理を行う必要はなく、当該処理を行う必要がある場合にのみ、当該処理を行えばよい。なお、当該処理を行う必要がない場合とは、例えば、物品の搬送量が少なく、使用電力に余裕がある場合である。
【0097】
また、本実施の形態では、コントローラ300は、走行モータ120のトルク値から走行車100の走行状態が減速状態(回生中)であることを確認することとした。しかし、コントローラ300は、走行車100の走行状態が減速状態であることを確認するだけではなく、走行車100が発生する回生電力の値を取得できることにしてもよい。これにより、発生する回生電力の値を把握することができるので、回生電力の大きさに応じてコントローラ300による制御方法を変更するなどによって、回生電力をさらに有効に活用することができる。
【0098】
なお、本実施の形態における時刻とは、時間帯が重なるように制御を行うことを示すために使用しているものであって、実際の日時という意味で使用しているものではない。
【0099】
また、本発明は、このような走行車システム10として実現することができるだけではなく、走行車システム10のコントローラ300に含まれる特徴的な処理をステップとする走行車システム10の制御方法として実現したり、そのような特徴的なステップをコンピュータに実行させるプログラムとして実現したりすることもできる。そして、そのようなプログラムは、CD−ROM等の記録媒体及びインターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【産業上の利用可能性】
【0100】
本発明は、回生電力を有効活用することができる走行車システムとして利用することができる。
【符号の説明】
【0101】
10 走行車システム
20 分電盤
100 走行車
101 レール
102 ラック
110 走行用ドライバ
120 走行モータ
130 移載用ドライバ
140 移載モータ
200 電源回生コンバータ
210 電力線
300 コントローラ
310 通信線
【技術分野】
【0001】
本発明は、複数の走行車と当該複数の走行車の走行を制御するコントローラとを備える走行車システムに関する。
【背景技術】
【0002】
近年、物品を搬送する搬送台車のような走行車を複数備え、当該複数の走行車をコントローラで制御する走行車システムが広く実用化されている。このような走行車システムは、複数の走行車すべてを走行させるために、すべての走行車の消費電力の総和をもとに電源設備の容量を計画する必要があり、大きい容量の電源設備が必要である。
【0003】
このため、従来、走行車の減速時に発生する回生電力を補助電源に充電する走行車システムが提案されている(例えば、特許文献1参照)。これにより、補助電源に充電された電力を活用することで、電源設備の容量を低減することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−81219号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の走行車システムでは、回生電力が有効に活用することができないという問題がある。
【0006】
つまり、従来の走行車システムでは、回生電力を補助電源に充電してから放電して使用するので、充電及び放電において電力のロスが生じる。このため、発生した回生電力から当該ロスを差し引いた量の電力しか、活用することができない。
【0007】
そこで、本発明は、このような問題に鑑みてなされたものであり、回生電力を有効活用することができる走行車システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る走行車システムは、複数の走行車と、前記複数の走行車の走行を制御するコントローラとを備える走行車システムであって、前記複数の走行車のそれぞれを電気的に接続するとともに、前記複数の走行車のそれぞれに電力を供給する電力線を備え、前記複数の走行車のそれぞれは、前記電力線を介して電力が供給されて駆動し前記複数の走行車のそれぞれを走行させるモータを有するとともに、減速時に、前記電力線を介して他の走行車に供給する回生電力を発生させ、前記コントローラは、前記複数の走行車のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、前記複数の走行車のうちの少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0009】
これによれば、第一走行車が減速している時刻と第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。つまり、第一走行車が減速する時刻と第二走行車が加速する時刻とを同期させることで、第一走行車の減速により発生した回生電力を、第二走行車の加速に使用することができる。このため、回生電力の充放電によるロスなどが生じることがなく、回生電力を有効活用することができる。
【0010】
また、好ましくは、前記コントローラは、前記第二走行車の台数が所定の第一台数以下になるように、前記複数の走行車の走行を制御する。
【0011】
これによれば、第二走行車の台数が所定の台数以下になるように、複数の走行車の走行を制御する。つまり、加速する走行車の数を所定の台数以下に制限する。これにより、走行車の加速によってピーク電力が増加するのを抑制することができるので、電源設備の容量を低減することができる。
【0012】
また、好ましくは、前記コントローラは、前記第一走行車の台数が前記第二走行車の台数よりも多くなる場合に、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0013】
これによれば、第一走行車の台数が第二走行車の台数よりも多くなる場合に、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。つまり、減速する走行車の台数が加速する走行車の台数よりも多くなる場合に、走行車の減速により発生した回生電力を、走行車の加速に使用する。これにより、走行車の加速に多くの回生電力を使用することができるので、回生電力を有効活用して、走行車の加速により使用する電力の増加を抑制することができる。
【0014】
また、好ましくは、前記複数の走行車のそれぞれは、さらに、前記モータを駆動させて前記複数の走行車のそれぞれの位置決めを行うことができるドライバを有し、前記走行車システムは、さらに、前記コントローラとそれぞれの前記ドライバとを接続する通信線を備え、前記コントローラは、前記通信線を介して、前記ドライバに前記モータを駆動させることで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0015】
これによれば、通信線を介して、ドライバにモータを駆動させることで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。このため、サーボアンプなどのドライバにモータを駆動させる信号を送ることで、容易に、複数の走行車の走行を制御することができる。
【0016】
また、好ましくは、前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第一走行車の減速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0017】
これによれば、ドライバが取得したモータのトルク値から、第一走行車の減速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。このため、当該トルク値を用いることで、走行車の減速状態を確認することができるので、容易に、複数の走行車の走行を制御することができる。
【0018】
また、好ましくは、前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第二走行車の加速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する。
【0019】
これによれば、ドライバが取得したモータのトルク値から、第二走行車の加速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車の走行を制御する。このため、当該トルク値を用いることで、走行車の加速状態を確認することができるので、容易に、複数の走行車の走行を制御することができる。
【0020】
また、好ましくは、前記コントローラは、前記第一走行車が減速して回生電力を発生する予定を予測することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記第二走行車に加速を待機させる。
【0021】
これによれば、第一走行車が減速して回生電力を発生する予定を予測することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、第二走行車に加速を待機させる。このため、回生電力を発生する予定時刻を予測することで、容易に、複数の走行車の走行を制御することができる。
【0022】
また、好ましくは、前記コントローラは、前記複数の走行車のうちの定速で走行中の走行車の台数が所定の第二台数以上の場合に、前記走行中の走行車が減速して回生電力を発生する予定であると予測し、前記第二走行車に加速を待機させる。
【0023】
これによれば、定速で走行中の走行車の台数が所定の台数以上の場合に、走行中の走行車が減速して回生電力を発生する予定であると予測し、第二走行車に加速を待機させる。つまり、定速で走行中の走行車の台数が多い場合は、当該定速で走行中の走行車が順次減速していくことが予測されるため、当該走行車の減速により発生するであろう回生電力を有効活用するために、第二走行車に加速を待機させる。これにより、回生電力を有効活用して、走行車の加速により使用する電力の増加を抑制することができる。
【0024】
また、本発明は、このような走行車システムとして実現することができるだけではなく、走行車システムの制御装置に含まれる特徴的な処理をステップとする走行車システムの制御方法として実現したり、そのような特徴的なステップをコンピュータに実行させるプログラムとして実現したりすることもできる。そして、そのようなプログラムは、CD−ROM等の記録媒体及びインターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【発明の効果】
【0025】
本発明に係る走行車システムによれば、回生電力を有効活用することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の実施の形態における走行車システムを模式的に示す斜視図である。
【図2】本発明の実施の形態における走行車システムの構成を示すブロック図である。
【図3】本発明の実施の形態におけるコントローラが行う動作の一例を示すフローチャートである。
【図4】本発明の実施の形態におけるコントローラがピーク電力を低減する処理を行う動作の一例を示すフローチャートである。
【図5】本発明の実施の形態におけるコントローラが行う走行車の走行状態の確認処理を説明する図である。
【図6】本発明の実施の形態におけるコントローラが消費電力を低減する処理を行う動作の一例を示すフローチャートである。
【図7】本発明の実施の形態におけるコントローラが消費電力を低減する処理を行う動作の他の一例を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について図面を用いて詳細に説明する。
【0028】
図1は、本発明の実施の形態における走行車システム10を模式的に示す斜視図である。
【0029】
同図に示すように、走行車システム10は、走行経路に沿って設けられるラック102に対し、物品を移載するための走行車100を複数台備えるシステムであって、複数の走行車100とコントローラ300とを備えている。
【0030】
走行車100は、走行経路を形成するレール101に沿って往復動することで、載置された物品をラック102に対し移載する搬送台車である。コントローラ300は、複数の走行車100の走行を制御する装置である。なお、走行車100及びコントローラ300の詳細な説明については、後述する。
【0031】
図2は、本発明の実施の形態における走行車システム10の構成を示すブロック図である。
【0032】
同図に示すように、走行車システム10は、図1に示された複数の走行車100及びコントローラ300の他に、電源回生コンバータ200、電力線210及び通信線310を備えている。
【0033】
電源回生コンバータ200は、分電盤20から交流電力を受電し、受電した交流電力を直流電力に変換して、電力線210を介して、複数の走行車100のそれぞれに当該直流電力を供給する。
【0034】
電力線210は、複数の走行車100のそれぞれを電気的に接続するとともに、複数の走行車100のそれぞれに電力を供給するための電力線である。
【0035】
複数の走行車100(同図では、1号機〜n号機のn台の走行車)のそれぞれは、電力線210を介して供給される電力によって走行する。また、複数の走行車100のそれぞれは、減速時に、電力線210を介して他の走行車に供給する回生電力を発生させる。つまり、発生した回生電力は、他の走行車100の走行に利用される。
【0036】
ここで、当該複数の走行車100のそれぞれは、走行用ドライバ110、走行モータ120、移載用ドライバ130及び移載モータ140を備えている。
【0037】
走行モータ120は、電力線210を介して電力が供給されて駆動し、走行車100を走行させるサーボモータなどのモータである。
【0038】
走行用ドライバ110は、走行モータ120を駆動させて、走行車100の走行位置の位置決めを行うことができる走行用のサーボアンプなどのドライバである。走行用ドライバ110は、走行モータ120のトルク値を取得することができる。
【0039】
移載モータ140は、電力線210を介して電力が供給されて駆動し、物品を移載する移載装置(図示せず)を動作させるサーボモータなどのモータである。
【0040】
移載用ドライバ130は、移載モータ140を駆動させて、当該移載装置の移載位置の位置決めを行うことができる移載用のサーボアンプなどのドライバである。
【0041】
コントローラ300は、複数の走行車100を集中制御する。具体的には、コントローラ300は、通信線310を介して、複数の走行車100のそれぞれの走行用ドライバ110及び移載用ドライバ130に、走行モータ120及び移載モータ140を駆動させることで、複数の走行車100の走行及び物品の移載を制御する。
【0042】
また、コントローラ300は、複数の走行車100のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、複数の走行車100のうちの少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。
【0043】
例えば、コントローラ300は、1号機の走行車100が減速している時刻と2号機の走行車100が加速している時刻とが重複するように、1号機及び2号機の走行車100の走行を制御する。なお、コントローラ300が複数の走行車100の走行を制御する処理の詳細については、後述する。
【0044】
通信線310は、コントローラ300と複数の走行車100それぞれの走行用ドライバ110及び移載用ドライバ130とを接続する通信線である。
【0045】
ここで、コントローラ300と、複数の走行車100それぞれの走行用ドライバ110及び移載用ドライバ130との間では、CC−Link(Control & Communication Link)などのフィールドネットワークなどによって、高速通信が行われる。これにより、コントローラ300と各走行車100との間で、リアルタイムに情報の伝達を行うことができる。
【0046】
次に、コントローラ300が複数の走行車100の走行を制御する処理の詳細について、説明する。
【0047】
図3は、本発明の実施の形態におけるコントローラ300が行う動作の一例を示すフローチャートである。
【0048】
同図に示すように、まず、コントローラ300は、複数の走行車100の走行に使用される電力について、ピーク電力を低減する処理を行う(S102)。具体的には、コントローラ300は、同時に加速する走行車100の台数を抑制することで、ピーク電力を低減する。このピーク電力を低減する処理の詳細については、後述する。
【0049】
そして、コントローラ300は、複数の走行車100の走行に使用される電力について、消費電力を低減する処理を行う(S104)。具体的には、コントローラ300は、走行車100が減速している時刻と他の走行車100が加速している時刻とが重複するように、複数の走行車100の走行を制御することで、消費電力を低減する。この消費電力を低減する処理の詳細については、後述する。
【0050】
まず、コントローラ300がピーク電力を低減する処理(図3のS102)の詳細について、説明する。
【0051】
図4は、本発明の実施の形態におけるコントローラ300がピーク電力を低減する処理を行う動作の一例を示すフローチャートである。
【0052】
同図に示すように、まず、コントローラ300は、走行用ドライバ110から、走行モータ120のトルク値を取得する(S202)。
【0053】
そして、コントローラ300は、走行車100の走行状態を確認する(S204)。
【0054】
ここで、以下に、コントローラ300が行う走行車100の走行状態の確認処理について、説明する。
【0055】
図5は、本発明の実施の形態におけるコントローラ300が行う走行車100の走行状態の確認処理を説明する図である。
【0056】
同図の(a)に示すように、走行車100が加速、定速及び減速を行うように走行することとする。
【0057】
そして、走行車100が加速中は、同図の(b)に示すように、走行モータ120のトルク値は上昇し、所定の力行閾値を超える。この場合、同図の(c)に示すように、コントローラ300は、走行車100の走行状態が加速状態(力行中)であるとして、走行車100の走行状態を確認する。つまり、この場合の走行車100の走行状態においては、走行車100は電力を使用している。
【0058】
ここで、走行モータ120のトルク値にはノイズが含まれるため、コントローラ300は、当該トルク値が所定の力行閾値を超える場合に、走行車100が力行中であると判断する。なお、力行閾値はどのような値であってもよいし、力行閾値を設けなくてもよい。
【0059】
また、走行車100が定速中は、同図の(b)に示すように、走行モータ120のトルク値は一定である。この場合、同図の(c)に示すように、コントローラ300は、走行車100の走行状態が定速状態(定速中)であるとして、走行車100の走行状態を確認する。
【0060】
また、走行車100が減速中は、同図の(b)に示すように、走行モータ120のトルク値は下降し、所定の回生閾値を下回る。この場合、同図の(c)に示すように、コントローラ300は、走行車100の走行状態が減速状態(回生中)であるとして、走行車100の走行状態を確認する。つまり、この場合の走行車100の走行状態においては、走行車100は回生電力を発生している。
【0061】
ここで、走行モータ120のトルク値にはノイズが含まれるため、コントローラ300は、当該トルク値が所定の回生閾値を下回る場合に、走行車100が回生中であると判断する。なお、回生閾値はどのような値であってもよいし、回生閾値を設けなくてもよい。
【0062】
図4に戻り、コントローラ300は、走行車100の走行状態の確認結果から、加速する走行車100である第二走行車の台数が、所定の第一台数以下か否かを判断する(S206)。なお、この所定の第一台数は、抑制したいピーク電力の値によってユーザにより定められる値であり、特に限定されない。
【0063】
そして、コントローラ300は、第二走行車の台数が所定の第一台数以下であると判断した場合は(S206でYES)、処理を終了する。
【0064】
また、コントローラ300は、第二走行車の台数が所定の第一台数以下でないと判断した場合は(S206でNO)、加速予定の他の走行車100を待機させる、または走行モータ120のトルク値が力行閾値以下になるように、加速予定の他の走行車100を制御する(S208)。
【0065】
そして、コントローラ300は、第二走行車の台数が所定の第一台数以下になるように、第二走行車の走行を制御する(S210)。このようにして、コントローラ300は、加速する走行車100の台数を低減させることで、ピーク電力を低減することができる。
【0066】
以上により、コントローラ300がピーク電力を低減する処理(図3のS102)は、終了する。
【0067】
次に、コントローラ300が消費電力を低減する処理(図3のS104)の詳細について、説明する。
【0068】
図6は、本発明の実施の形態におけるコントローラ300が消費電力を低減する処理を行う動作の一例を示すフローチャートである。
【0069】
同図に示すように、まず、コントローラ300は、走行用ドライバ110から、走行モータ120のトルク値を取得する(S302)。
【0070】
そして、コントローラ300は、走行車100の走行状態を確認する(S304)。つまり、コントローラ300は、走行用ドライバ110が取得した走行モータ120のトルク値から、減速中の走行車100が減速状態であると判断し、加速中の走行車100が加速状態であると判断することで、走行車100の走行状態を確認する。なお、このコントローラ300が行う走行車100の走行状態の確認処理は、図4で説明した処理(図4のS204)と同様であるため、詳細な説明は省略する。
【0071】
次に、コントローラ300は、走行車100の走行状態の確認結果から、減速する走行車100である第一走行車の台数が、加速する走行車100である第二走行車の台数よりも多いか否かを判断する(S306)。
【0072】
そして、コントローラ300は、第一走行車の台数が第二走行車の台数以下であると判断した場合は(S306でNO)、処理を終了する。
【0073】
また、コントローラ300は、第一走行車の台数が第二走行車の台数よりも多いと判断した場合は(S306でYES)、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、第一走行車及び第二走行車の走行を制御する(S308)。このようにして、コントローラ300は、第一走行車が発生する回生電力を第二走行車の走行に活用することで、消費電力を低減することができる。
【0074】
また、コントローラ300が消費電力を低減する処理(図3のS104)の他の一例について、説明する。
【0075】
図7は、本発明の実施の形態におけるコントローラ300が消費電力を低減する処理を行う動作の他の一例を示すフローチャートである。
【0076】
同図に示すように、まず、コントローラ300は、走行用ドライバ110から、走行モータ120のトルク値を取得する(S402)。
【0077】
そして、コントローラ300は、走行車100の走行状態を確認する(S404)。なお、このコントローラ300が行う走行車100の走行状態の確認処理は、図4及び図6で説明した処理(図4のS204及び図6のS304)と同様であるため、詳細な説明は省略する。
【0078】
次に、コントローラ300は、走行車100の走行状態の確認結果から、複数の走行車100のうちの定速で走行中の走行車100の台数が所定の第二台数以上であるか否かを判断する(S406)。なお、この所定の第二台数は、抑制したい消費電力の値によってユーザにより定められる値であり、特に限定されない。
【0079】
そして、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数よりも少ないと判断した場合は(S406でNO)、処理を終了する。
【0080】
また、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数以上であると判断した場合は(S406でYES)、走行中の走行車100が減速して回生電力を発生する予定であると予測し、加速予定の他の走行車100を待機させる、または走行モータ120のトルク値が力行閾値以下になるように、加速予定の他の走行車100を制御する(S408)。
【0081】
そして、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数よりも少なくなったか否かを判断する(S410)。
【0082】
コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数以上であると判断した場合は(S410でNO)、再度、加速予定の他の走行車100を待機させる、または走行モータ120のトルク値が力行閾値以下になるように、加速予定の他の走行車100を制御する(S408)。
【0083】
また、コントローラ300は、定速で走行中の走行車100の台数が所定の第二台数よりも少なくなったと判断した場合は(S410でYES)、定速で走行していた走行車100が減速し始めたと判断し、減速する走行車100である第一走行車が減速している時刻と、加速する走行車100である第二走行車が加速している時刻とが重複するように、第一走行車及び第二走行車の走行を制御する(S412)。
【0084】
このように、コントローラ300は、定速で走行中の走行車100が減速して回生電力を発生する予定を予測することで、当該定速で走行中の走行車100が減速するまで、他の走行車100に加速を待機させる。これにより、第一走行車が発生する回生電力を第二走行車の走行に活用することで、消費電力を低減することができる。
【0085】
以上により、コントローラ300が消費電力を低減する処理(図3のS104)は、終了する。
【0086】
以上のように、本発明に係る走行車システム10によれば、第一走行車が減速している時刻と第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。つまり、第一走行車が減速する時刻と第二走行車が加速する時刻とを同期させることで、第一走行車の減速により発生した回生電力を、第二走行車の加速に使用することができる。このため、回生電力の充放電によるロスなどが生じることがなく、回生電力を有効活用することができる。また、走行車100に回生電力を充電する機器を設置する必要がないため、走行車100の小型軽量化を図ることができる。
【0087】
また、第二走行車の台数が所定の台数以下になるように、複数の走行車100の走行を制御する。つまり、加速する走行車100の数を所定の台数以下に制限する。これにより、走行車100の加速によってピーク電力が増加するのを抑制することができるので、電源設備の容量を低減することができる。
【0088】
また、第一走行車の台数が第二走行車の台数よりも多くなる場合に、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。つまり、減速する走行車100の台数が加速する走行車100の台数よりも多くなる場合に、走行車100の減速により発生した回生電力を、走行車100の加速に使用する。これにより、走行車100の加速に多くの回生電力を使用することができるので、回生電力を有効活用して、走行車100の加速により使用する電力の増加を抑制することができる。
【0089】
また、通信線310を介して、走行用ドライバ110に走行モータ120を駆動させることで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。このため、サーボアンプなどの走行用ドライバ110に走行モータ120を駆動させる信号を送ることで、容易に、複数の走行車100の走行を制御することができる。
【0090】
また、走行用ドライバ110が取得した走行モータ120のトルク値から、第一走行車の減速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。このため、当該トルク値を用いることで、走行車100の減速状態を確認することができるので、容易に、複数の走行車100の走行を制御することができる。
【0091】
また、走行用ドライバ110が取得した走行モータ120のトルク値から、第二走行車の加速状態を確認することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、複数の走行車100の走行を制御する。このため、当該トルク値を用いることで、走行車100の加速状態を確認することができるので、容易に、複数の走行車100の走行を制御することができる。
【0092】
また、第一走行車が減速して回生電力を発生する予定を予測することで、第一走行車が減速している時刻と、第二走行車が加速している時刻とが重複するように、第二走行車に加速を待機させる。このため、回生電力を発生する予定時刻を予測することで、容易に、複数の走行車100の走行を制御することができる。
【0093】
また、定速で走行中の走行車100の台数が所定の台数以上の場合に、走行中の走行車100が減速して回生電力を発生する予定であると予測し、第二走行車に加速を待機させる。つまり、定速で走行中の走行車100の台数が多い場合は、当該定速で走行中の走行車100が順次減速していくことが予測されるため、当該走行車100の減速により発生するであろう回生電力を有効活用するために、第二走行車に加速を待機させる。これにより、回生電力を有効活用して、走行車100の加速により使用する電力の増加を抑制することができる。
【0094】
以上、本発明に係る走行車システム10について、実施の形態に基づいて説明したが、本発明は、この実施の形態に限定されるものではない。
【0095】
つまり、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【0096】
例えば、本実施の形態では、コントローラ300は、ピーク電力及び消費電力を低減する処理を行うこととしたが、コントローラ300は、常に当該処理を行う必要はなく、当該処理を行う必要がある場合にのみ、当該処理を行えばよい。なお、当該処理を行う必要がない場合とは、例えば、物品の搬送量が少なく、使用電力に余裕がある場合である。
【0097】
また、本実施の形態では、コントローラ300は、走行モータ120のトルク値から走行車100の走行状態が減速状態(回生中)であることを確認することとした。しかし、コントローラ300は、走行車100の走行状態が減速状態であることを確認するだけではなく、走行車100が発生する回生電力の値を取得できることにしてもよい。これにより、発生する回生電力の値を把握することができるので、回生電力の大きさに応じてコントローラ300による制御方法を変更するなどによって、回生電力をさらに有効に活用することができる。
【0098】
なお、本実施の形態における時刻とは、時間帯が重なるように制御を行うことを示すために使用しているものであって、実際の日時という意味で使用しているものではない。
【0099】
また、本発明は、このような走行車システム10として実現することができるだけではなく、走行車システム10のコントローラ300に含まれる特徴的な処理をステップとする走行車システム10の制御方法として実現したり、そのような特徴的なステップをコンピュータに実行させるプログラムとして実現したりすることもできる。そして、そのようなプログラムは、CD−ROM等の記録媒体及びインターネット等の伝送媒体を介して流通させることができるのは言うまでもない。
【産業上の利用可能性】
【0100】
本発明は、回生電力を有効活用することができる走行車システムとして利用することができる。
【符号の説明】
【0101】
10 走行車システム
20 分電盤
100 走行車
101 レール
102 ラック
110 走行用ドライバ
120 走行モータ
130 移載用ドライバ
140 移載モータ
200 電源回生コンバータ
210 電力線
300 コントローラ
310 通信線
【特許請求の範囲】
【請求項1】
複数の走行車と、前記複数の走行車の走行を制御するコントローラとを備える走行車システムであって、
前記複数の走行車のそれぞれを電気的に接続するとともに、前記複数の走行車のそれぞれに電力を供給する電力線を備え、
前記複数の走行車のそれぞれは、前記電力線を介して電力が供給されて駆動し前記複数の走行車のそれぞれを走行させるモータを有するとともに、減速時に、前記電力線を介して他の走行車に供給する回生電力を発生させ、
前記コントローラは、前記複数の走行車のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、前記複数の走行車のうちの少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
走行車システム。
【請求項2】
前記コントローラは、前記第二走行車の台数が所定の第一台数以下になるように、前記複数の走行車の走行を制御する
請求項1に記載の走行車システム。
【請求項3】
前記コントローラは、前記第一走行車の台数が前記第二走行車の台数よりも多くなる場合に、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項1又は2に記載の走行車システム。
【請求項4】
前記複数の走行車のそれぞれは、さらに、前記モータを駆動させて前記複数の走行車のそれぞれの位置決めを行うことができるドライバを有し、
前記走行車システムは、さらに、前記コントローラとそれぞれの前記ドライバとを接続する通信線を備え、
前記コントローラは、前記通信線を介して、前記ドライバに前記モータを駆動させることで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項1〜3のいずれか1項に記載の走行車システム。
【請求項5】
前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、
前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第一走行車の減速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項4に記載の走行車システム。
【請求項6】
前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、
前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第二走行車の加速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項4又は5に記載の走行車システム。
【請求項7】
前記コントローラは、前記第一走行車が減速して回生電力を発生する予定を予測することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記第二走行車に加速を待機させる
請求項1〜6のいずれか1項に記載の走行車システム。
【請求項8】
前記コントローラは、前記複数の走行車のうちの定速で走行中の走行車の台数が所定の第二台数以上の場合に、前記走行中の走行車が減速して回生電力を発生する予定であると予測し、前記第二走行車に加速を待機させる
請求項7に記載の走行車システム。
【請求項1】
複数の走行車と、前記複数の走行車の走行を制御するコントローラとを備える走行車システムであって、
前記複数の走行車のそれぞれを電気的に接続するとともに、前記複数の走行車のそれぞれに電力を供給する電力線を備え、
前記複数の走行車のそれぞれは、前記電力線を介して電力が供給されて駆動し前記複数の走行車のそれぞれを走行させるモータを有するとともに、減速時に、前記電力線を介して他の走行車に供給する回生電力を発生させ、
前記コントローラは、前記複数の走行車のうちの少なくとも1つの減速する走行車である第一走行車が減速している時刻と、前記複数の走行車のうちの少なくとも1つの加速する走行車である第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
走行車システム。
【請求項2】
前記コントローラは、前記第二走行車の台数が所定の第一台数以下になるように、前記複数の走行車の走行を制御する
請求項1に記載の走行車システム。
【請求項3】
前記コントローラは、前記第一走行車の台数が前記第二走行車の台数よりも多くなる場合に、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項1又は2に記載の走行車システム。
【請求項4】
前記複数の走行車のそれぞれは、さらに、前記モータを駆動させて前記複数の走行車のそれぞれの位置決めを行うことができるドライバを有し、
前記走行車システムは、さらに、前記コントローラとそれぞれの前記ドライバとを接続する通信線を備え、
前記コントローラは、前記通信線を介して、前記ドライバに前記モータを駆動させることで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項1〜3のいずれか1項に記載の走行車システム。
【請求項5】
前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、
前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第一走行車の減速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項4に記載の走行車システム。
【請求項6】
前記ドライバは、前記走行車が有する前記モータのトルク値を取得し、
前記コントローラは、前記ドライバが取得した前記モータのトルク値から、前記第二走行車の加速状態を確認することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記複数の走行車の走行を制御する
請求項4又は5に記載の走行車システム。
【請求項7】
前記コントローラは、前記第一走行車が減速して回生電力を発生する予定を予測することで、前記第一走行車が減速している時刻と、前記第二走行車が加速している時刻とが重複するように、前記第二走行車に加速を待機させる
請求項1〜6のいずれか1項に記載の走行車システム。
【請求項8】
前記コントローラは、前記複数の走行車のうちの定速で走行中の走行車の台数が所定の第二台数以上の場合に、前記走行中の走行車が減速して回生電力を発生する予定であると予測し、前記第二走行車に加速を待機させる
請求項7に記載の走行車システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−17189(P2012−17189A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−156202(P2010−156202)
【出願日】平成22年7月8日(2010.7.8)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月8日(2010.7.8)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]