
走行車両の安全運転支援システム
【課題】路側機と走行車両あるいは各走行車両間の距離と方向とを測定し、自車両の位置および他車両との相対的な位置関係を測位し、運転席前方部にリアルタイムで表示することにより、走行車両の安全運転支援を安価に提供する。
【解決手段】走行車両21a〜21dに搭載される移動局と、路側に設置される路側機22a、22bとから構成され、前記路側機が、少なくとも、報知信号を含む無線信号を、エリア内の移動局21aa〜21dbに向けて間欠発信し、前記移動局が、前記無線信号を受信して少なくとも報知情報に含まれる交通規制情報を再生するとともに、前記路側機および周辺の移動局との間の相対距離と位置する方向とを測定して相対位置を測位し、必要に応じて前記交通規制情報、前記路側機および周辺の移動局との相対位置、危険を察知した警報、あるいはこれらの組み合わせを画面上に表示する。
【解決手段】走行車両21a〜21dに搭載される移動局と、路側に設置される路側機22a、22bとから構成され、前記路側機が、少なくとも、報知信号を含む無線信号を、エリア内の移動局21aa〜21dbに向けて間欠発信し、前記移動局が、前記無線信号を受信して少なくとも報知情報に含まれる交通規制情報を再生するとともに、前記路側機および周辺の移動局との間の相対距離と位置する方向とを測定して相対位置を測位し、必要に応じて前記交通規制情報、前記路側機および周辺の移動局との相対位置、危険を察知した警報、あるいはこれらの組み合わせを画面上に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、一方向通信あるいは時分割双方向通信によって、周辺に存在する走行車両との相対的な距離と方向を高精度でしかも瞬時に測定するとともに、運転席の前方部に測定した結果をリアルタイムで表示することによって、走行車両の安全運転を支援するためのシステムに関するものである。
【背景技術】
【0002】
従来から、車間距離を測定する装置、あるいは走行車両の安全運転を支援するためのシステムが提案されている。(例えば、特許文献1から5参照)
【特許文献1】特開2009−100061号
【特許文献2】特開2001−199257号
【特許文献3】特開2005−115883号
【特許文献4】特開2005−190307号
【特許文献5】特表2007−310457号
【0003】
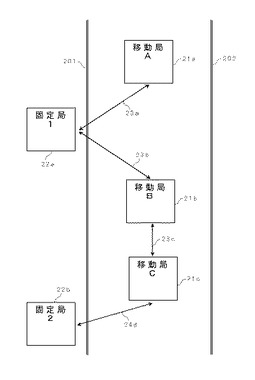
図6は、特許文献1に記載されている従来の「ユビキタスモバイルネットワーク」の実施例である。図6において、道路の区分などを示す分離帯101、102の内側を走行する車両に搭載された複数の移動局21〜23と道路脇に設置された任意の数の路側機31、32から構成され、相互間の相対距離を瞬時に高精度で測定することによって、最適化されたユビキタスモバイルネットワークを構成することができるとされているが、走行車両の安全運転を支援するためのシステムについては言及されていない。
【0004】
特許文献2に記載されている従来の「車両用走行制御装置」では、他車両走行検出部1は、先行車両との間の距離を測定する。路車間通信部2は、自車両とその先行車両のさらに前を走行している先々行車両の位置を示す車間距離データを走行支援システムの路側機から受信し、その受信データに基いて先々行車両との間の距離を判定する。車間距離制御部5は、他車両走行検出部1から得られる先行車両との車間距離に基づいた加減速制御を行うことにより車両を先行車両に追随走行させると共に、その加減速制御を行う際に路車間通信部2から得られる先々行車両との車間距離を加味した制御を行うとされているが、先行車両との間の距離を直接測定しないので測定精度に問題がある。
【0005】
特許文献3に記載されている従来の「無線信号方式による自動車自動走行の方法」では、自動走行専用道路を,ある長さ単位で区切り、各区間に進入する車両に対し信号を発信する狭域無線通信装置を設置する。さらに、信号を系統運用する信号管制センタ−を設け、これと各区間の狭域無線通信装置とを通信回線で接続する。車両に対し走行制限速度信号を発信し、前走車両に後走車両が接近すると、後走車両に減速し走行速度を落とすように、前走車両が離れてくると加速し走行速度を上げるよに、車両の存在状態に応じて変化させる。一方、車両は自動走行に必要な各種装置を搭載し狭域無線通信装置からの受信した信号により車両の走行速度制御および進路制御を行なうとされているが、前走車両と後走車両との間の距離を直接測定しないので測定精度に問題がある。
【0006】
特許文献4に記載されている従来の「車間距離測定装置」では、車間距離測定装置が、同一の走行車線で前方を走行する車両から無線により送信された前方車両情報を受信する第1の受信手段と、道路の路側に設置された路側送信装置から無線により送信された路側送信装置情報を受信する第2の受信手段と、前方を走行する車両との車間距離を演算する演算手段と、走行速度、車間距離及び路側送信装置情報を新しい前方車両情報として、同一の走行車線で後方を走行する車両へ無線により送信する送信手段とを備えるとされているが、自車両が前記路側送信装置の前面を横切った時刻を用いることで、車間距離を直接測定しないので測定精度に問題がある。
【0007】
特許文献5に記載されている従来の「車車間通信システム、車車間通信装置、および制御装置」では、車車間通信システムにおいて、各車車間通信装置を構成する支援制御ECUは、無線機を介して、ソナーやカメラを用いて検出した移動物体の情報、およびGPSアンテナや車速センサを用いて検出した自車両の情報を、他車両に搭載された車車間通信装置に送信するとともに、他車両に搭載された車車間通信装置から送信されてくる同種の情報を受信する。そして、支援制御ECUは、右直事故支援処理にて、自車両の位置情報と無線機を介して他車両から受信した移動物体の位置情報および他車両の情報とに基づいて、移動物体が自車両にとっての危険要素であるか否かを判断し、該判断結果に応じて警告を出力するとされているが、ソナーやカメラを用いて検出した移動物体の情報、およびGPSアンテナや車速センサを用いて検出した自車両の情報を用いる点で、車間距離を直接測定しないので測定精度に問題がある。
【発明の開示】
【発明が解決しようとする課題】
【0008】
この発明は、路側機と移動局との間の距離と方向、前走車両と後走車両との間の距離と方向、自車両と両側を走行中の車両との間の距離と方向、あるいはこれらの組合せを、一方向通信あるいは時分割の双方向通信によって瞬時に測定し、自車両の位置および前後左右の車両との相対位置の関係を高精度で測位するとともに、運転席の前方部にリアルタイムで表示することによって、走行車両の安全運転支援システムを安価に提供することを目的とするものである。
【課題を解決するための手段】
【0009】
この発明に係わる走行車両の安全運転支援システムは、少なくとも、路側に設置される路側機と走行車両に搭載される移動局との間、あるいは走行車両に搭載される移動局と周辺を走行中の他の移動局との間で、少なくとも、距離測定信号と方向測定信号とを含む無線信号を、一方向通信あるいは時分割の双方向通信によって、複数のアンテナを周期的に切替えながら間欠発信し、
【0010】
前記移動局が、受信した無線信号から前記距離測定信号と方向測定信号とを再生し、前記再生した距離測定信号と方向測定信号の位相、受信信号強度(RSSI)、もしくはこれらの両方を前記複数のアンテナに対応して測定し、前記測定結果から、路側機と移動局との間の距離と方向、前走車両と後走車両との間の距離と方向、自車両と両側を走行中の車両との間の距離と方向、あるいはこれらの組合せを測定するとともに、運転席の前方部にリアルタイムで表示することを可能とする。
【発明の効果】
【0011】
本発明により、路側機と移動局との間、前走車両と後走車両との間、自車両と両側の車両との間、あるいはこれらの間の距離と方向とを、一方向通信あるいは時分割双方向通信によって瞬時にしかも高精度で測定し、自車両の位置および周辺の車両との相対位置の関係を運転席の前方部にリアルタイムで表示することによって、走行車両の安全運転支援システムを安価に構成することができる。
【図面の簡単な説明】
【0012】
【図1】68発明の第1の実施の形態による安全運転支援システムの構成図
【図2】本発明の第2の実施の形態による安全運転支援システムの構成図
【図3】本発明の安全運転支援システムの移動局の構成図
【図4】本発明の安全運転支援システムの制御手段の構成図
【図5】本発明の安全運転支援システムの表示画面の例
【図6】従来の実施例を示す構成図
【発明を実施するための最良の形態】
【0013】
この発明に係わる走行車両の安全運転支援システムは、図1および請求項1に本発明の第1の形態を示すように、無線信号を用いる走行車両の安全運転支援システムが、少なくとも、第1の走行車両の後部に搭載された第1の移動局およびダッシュボード周辺部に設けられた第1の表示手段と、第2の走行車両の前部に搭載された第2の移動局およびダッシュボード周辺部に設けられた第2の表示手段とから構成され、
前記第1の移動局が、前記第2の移動局との間の距離と、前記第2の移動局が位置する方向とを測定するための第1の発受信手段を有し、前記第2の移動局が、前記第1の移動局との間の距離と、前記第1の移動局が位置する方向とを測定するための第2の発受信手段を有する。
【0014】
前記第1の発受信手段と第2の発受信手段とが、少なくとも、前記第1の発受信手段と第2の発受信手段との間の相対的な距離を測定するための距離測定手段と、前記第1の発受信手段と第2の発受信手段との間の相対的な方向を測定するための方向測定手段とを有し、
前記第1の移動局および第2の移動局の両側において、前記相対的な距離と方向の測定結果から、前記第1の移動局と第2の移動局との間の相対的な位置関係を高精度で測位し、かつ前記第1の表示手段および第2の表示手段に前記相対的な位置関係を表示する。
【0015】
また、図5および請求項2に示すように、前記表示手段が、少なくとも、周辺に所在する走行車両との相対的な位置関係を表示し、周辺に所在する走行車両との相対距離が規定された車間距離以下である場合には警告を表示し、周辺に所在する走行車両の登録番号を表示し、あるいはこれらの組合せを表示する。
また、請求項3に示すように、前記走行車両が速度制御手段を有し、前方車両との位置関係が所定の車間距離以下である場合に、自車両の速度を制御して車間距離を所定の値内に制御する。
【0016】
また、請求項4に示すように、前記移動局が、歩道あるいは横断歩道を歩行する歩行者が携帯する無線タグとの相対的な距離と方向を測定し、前記表示手段に、少なくとも、前記歩行者との相対的な位置関係を表示する。
また、請求項5に示すように、前記移動局が、路側に設置された路側機との相対的な距離と方向とを測定し、前記表示手段に自車両の道路地図上の位置を表示する。
【0017】
また、請求項6に示すように、前記移動局が、走行距離を機械的に計測する手段、走行方向を機械的に検知する手段、あるいはこれらの両方を有し、前記路側機との相対的な距離と方向との測定を補正しあるいは補完する。
また、請求項7に示すように、前記移動局が走行車両の前部と後部に搭載されており、前部の移動局で測位した位置情報を、後部の移動局を介して後続車両に対して中継しあるいは発信する。
【0018】
(実施の形態1)
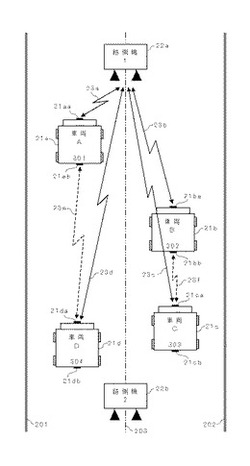
図1は本発明の第1の実施の形態による安全運転支援システムの構成図である。図1において、201、202、203は道路の区分などを示す分離帯、21a〜21dは走行車両、21aa〜21dbは移動局、22a、22bは路側機、23a〜23dは路側機と移動局と間の伝搬経路、23e、23fは移動局間の伝搬経路である。
【0019】
無線信号を用いる走行車両の安全運転支援システムが、少なくとも、走行車両21a〜21dの前方に搭載される移動局21aa〜21dbと、路側に設置される路側機22a、22bとから構成され、前記路側機22a、22bが、少なくとも、システム同期信号と、識別信号と、報知信号と、距離測定信号と、方向測定信号とを含む無線信号を、伝搬経路23a〜23dを経由して、エリア内の移動局21aa〜21dbに向けて間欠発信すると、前記移動局21aa、21ba、21ca、21daが、前記無線信号を複数のアンテナを切替ながら受信して、少なくとも、報知情報に含まれる交通情報もしくは交通規制情報を再生するとともに、前記路側機からの距離と方向とをリアルタイムで測定して、必要に応じて図5に例示する表示画面上に表示する。
【0020】
一方、各移動局は、周辺の移動局に向けて、ランダムなタイミングで一方向通信あるいは時分割双方向通信によって、少なくとも、システム同期信号と、識別信号と、距離測定信号と、方向測定信号とを含む無線信号を、複数のアンテナを周期的に切替えながら間欠的に発信を行い、相互間の距離と方向とをリアルタイムで測定して、必要に応じて図5に例示する表示画面上に表示することができる。
【0021】
(実施の形態2)
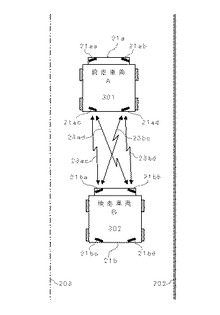
図2は本発明の第2の実施の形態による安全運転支援システムの構成図である。図2において、202、203は道路の区分などを示す分離帯、21aは前走車両、21ab〜21adは前走車両の移動局、21bは後走車両、21ba〜21bbは後走車両の移動局、23ac〜23bdは前走車両の移動局と後走車両の移動局との間の伝搬経路である。
【0022】
無線信号を用いる走行車両の安全運転支援システムが、少なくとも、前走車両21aの前方と後方とに搭載される移動局21aa〜21adと、後走車両21bの前方と後方とに搭載される移動局21ba〜21bdとから構成され、前走車両21aの後方に搭載される移動局21ac、21adと、後走車両21bの前方に搭載される移動局21ba、21bbとが相対しているものとする。
【0023】
前記前走車両21aと後走車両21bとが、同一レーンを走行しており、前記後走車両21bの前方の移動局21baが、少なくとも、システム同期信号と、識別信号と、距離測定信号と、方向測定信号とを含む無線信号を、複数のアンテナを周期的に切替えながら、前記前走車両21aの後方の移動局21ab、21adに向けてバースト信号として間欠発信すると、前記後走車両21bの前方の移動局21ba、21bbが、前記無線信号を受信して前記距離測定信号と方向測定信号とを再生し、前記距離測定信号から前走車両21aとの間の相対距離を測定し、前記方向測定信号から前走車両21aが位置する方向を測定し、前記相対距離と方向の測定結果から前記前走車両21aとの相対位置を測位するとともに、必要に応じて図5に示す表示画面上に表示することができる。
【0024】
同様にして、前記後走車両21bの前方の移動局21bbと、前記前走車両21aの後方の移動局21ac、21adとの間で、お互いの相対位置を高精度で測位すると、前走車両21aと後走車両21bとの間で合計4通りの相対位置が測位できるので、これらの内で、例えば、測定された距離が比較的に短いものを選択して平均をとると、マルチパスに影響されない高精度でかつ高信頼度の相対位置の測位が可能となる。
なお、前記移動局、路側機、もしくはこれらの両方からの間欠発信の間隔が自励発振器によって制御され、前記移動局の移動速度の変化に応じて制御され、あるいは前記移動局の移動速度が速い場合には間欠発信の間隔を狭くするよう制御されることで、お互いに衝突する確率を下げることができる。
【0025】
また、前記走行車両の移動局が図5に示す表示手段を有し、前記表示手段に、少なくとも、路側機から間欠発信される報知情報に含まれる交通規制情報を再生して表示をし、測定した路側機と移動局との相対位置から自車両の道路上の現在位置を算出して表示をし、周辺に所在する他の走行車両との位置関係を算出して表示をし、他の走行車両との相対距離が決められた車間距離以下である警告を表示しあるいは警告音を発音し、走行車両の登録番号を表示し、あるいはこれらの組合せを行うことができる。
【0026】
また、歩道あるいは横断歩道を歩行する歩行者が無線タグを携帯し、前記無線タグが、少なくとも、システム同期信号と、識別信号と、測位要求信号とを含む無線信号を、前記移動局に向けバースト信号として間欠発信し、前記無線信号を受信した移動局が、前記無線タグに向けて、起点信号を含む無線信号を発信し、前記無線タグが受信した起点信号と同期した距離測定信号と、これとは別に方向測定信号とを含む無線信号を発信し、前記移動局が、複数のアンテナを周期的に切替ながら無線信号を受信して、再生した距離測定信号の位相を前記生成した起点信号を基準として測定し、前記方向測定信号の位相を複数のアンテナに対応して測定し、前記相対距離と方向の測定結果から前記無線タグとの相対位置を測位し、測位した結果から、画面上に接近警報を表示し、あるいは警報音を発する。
【0027】
また、前記走行車両の移動局、前記歩行者が携帯する無線タグ、もしくはこれらの両方が、少なくとも交信記録もしくは警報記録を含む直前情報を記憶する記憶手段を有し、前記移動局、前記無線タグ、もしくはこれらの両方が交通事故に遭遇した際に、前記記憶手段が直前情報の記憶を保護する保護手段を有する。
また、前記路側機もしくは移動局から発信される起点信号、距離測定信号、方向測定信号、もしくはこれらの組み合わせが、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せである。
【0028】
また、前記移動局の受信機、路側機の受信機、もしくはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信機において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記相対距離の算出結果、位置する方向の算出結果、あるいはこれらの両方の結果をフイルタリングし、補正し、あるいは補完する。
【0029】
また、前記路側機の内の特定の路側機をノードとし、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動局の位置を測位するために必要な情報の交換、前記移動局の位置を測位した結果の情報の交換、あるいはこれらの両方を行なう。
また、前記移動局が大型車両に搭載されており、後続車両が乗用車の場合には、前記乗用車から路側機が見通せない場合があるので、前記移動局は、少なくとも、前記路側機から受信した報知情報と、検知した自局の位置情報とを、前記後続車両に対して中継しあるいは発信することで、後続車両に対して妨害することなく情報を伝達することができる。
【0030】
図3は本発明の安全運転支援システムの移動局の構成図であり、21aは第1の移動局、21bは第2の移動局、11a、11bは制御手段、12a、12bは送信機、13a、13bは受信機、14a、14bはアンテナ切替手段、15a、15bはアンテナ、16a、16bは表示手段、41は無線信号の伝搬路である。
第1の移動局21aと第2の移動局21bとの間の相対位置を特定するために、前記第1の移動局21aが、制御手段11aと、送信機12aと、受信機13aと、アンテナ切替手段14aと、複数のアンテナ15a1、15a2とから構成され、前記第2の移動局21bが、制御手段11bと、送信機12bと、受信機13bと、アンテナ切替手段14bと、複数のアンテナ15b1、15b2とから構成される。
【0031】
前記第2の移動局21bにおいて、送信機12bから少なくとも制御手段11bで生成した第1の距離測定信号を含む無線信号を、複数のアンテナ15b1、15b2をアンテナ切替手段14bによって周期的に切替えながらバースト信号として間欠発信し、前記第1の移動局21aにおいて、複数のアンテナ15a1、15a2をアンテナ切替手段14aによって周期的に切替えながら受信機13aで受信し、制御手段11aにおいて受信した第1の距離測定信号を再生し、前記再生した第1の距離測定信号と高精度で同期しあるいは直交した第2の距離測定信号と、これとは別に方向測定信号を生成し、前記生成した第2の距離測定信号と方向測定信号とを含む無線信号を、複数のアンテナ15a1、15a2をアンテナ切替手段14aによって周期的に切替えながら送信機12aから時分割でバースト信号として発信する。
【0032】
一方、前記第2の移動局21bにおいて、前記無線信号を、複数のアンテナ15b1、15b2をアンテナ切替手段14bによって周期的に切替えながら、受信機13bで受信し、前記制御手段11bが、前記第1の距離測定信号と方向測定信号とを再生し、自局21bで生成した第1の距離測定信号を基準として前記再生した第1の距離測定信号の位相を測定して前記第1の移動局との間の相対距離を算出し、前記複数のアンテナ15b1、15b2に対応して方向測定信号の位相差を測定して前記第1の移動局21aが位置する方向を算出し、あるいは、前記距離測定信号の位相を測定する代わりに、受信した距離測定信号の受信信号強度(RSSI)を測定し、アンテナ間の結合損を算出することによって相対距離を算出し、前記距離と方向の算出結果から前記第1の移動局21aとの相対位置を特定し、結果を表示手段16bに伝送して表示する。
【0033】
同様に、前記第2の移動局21bにおいて、引き続き、前記第2の距離測定信号と高精度で同期しあるいは直交した第3の距離測定信号を生成し、前記送信機12bから、少なくとも、前記制御手段11bにおいて生成した前記第3の距離測定信号と、別に生成した方向測定信号を含む無線信号を複数のアンテナ15b1、15b2をアンテナ切替手段14bによって周期的に切替えながらバースト信号として時分割で発信する。
【0034】
前記前記第1の移動局21aにおいて、前記無線信号を複数のアンテナ15a1、15a2をアンテナ切替手段14aによって周期的に切替えながら、受信機13aで受信し、前記制御手段11aにおいて前記第3の距離測定信号を再生し、自局21aで生成した第2の距離測定信号を基準として、前記再生した第3の距離測定信号の位相を測定して前記第2の移動局21bとの間の相対距離を算出し、前記複数のアンテナ15a1、15a2に対応して方向測定信号の位相差を測定して前記第2の移動局21bが位置する方向を算出し、あるいは、前記距離測定信号の位相を測定する代わりに、距離測定信号の受信信号強度(RSSI)を測定し、アンテナ間の結合損を算出することによって相対距離を算出し、前記距離と方向の算出結果から前記第2の移動局21bとの相対位置を特定し、結果を表示手段16aに伝送し表示する。
【0035】
なお、前記第1の移動局21aと前記第2の移動局21bとの間で位置情報を交換し、両者の平均値を求めることで、前記相対位置の算出精度を改善することが可能となる。
また、前記に引き続き、前記第1の移動局21aと前記第2の移動局21dとの間で相互通信を続けることによって、複数回の距離と方向との算出を行い、これらの平均値を求めることで、位置の算出精度の改善が可能となる。
また、前記第1〜第3の距離測定信号、方向測定信号、あるいはこれらの組み合わせが、法令により許容される周波数の範囲内であり、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの任意の組み合わせである。
【0036】
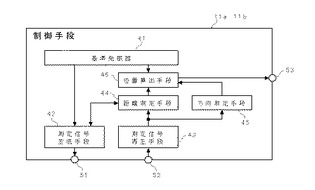
図4は本発明の安全運転支援システムの制御手段の構成図であり、11a、11bは制御手段、41は基準発振器、42は測定信号生成手段、43は測定信号再生手段、44は距離測定手段、45は方向測定手段、46は位置算出手段、51、50は接続端子である。
前記測定信号生成手段42によって、少なくとも、システム同期信号と、マックレイヤと、第1〜第3の距離測定信号と、方向測定信号が生成され、接続端子51を介して図3に示す送信機12a、12bに供給され、その内の第1と第2の距離測定信号は、距離測定のための基準として、別途、前記距離測定手段44にも供給される。
【0037】
一方、図3に示す受信機13a、13bによって受信される無線信号は、直接あるいは中間周波信号に変換され、接続端子52を介して前記測定信号再生手段43に供給され、前記距離測定信号および方向測定信号が再生され、前記距離測定手段44および方向測定手段45に供給され、前記距離測定手段44によって、前記第1の距離測定信号あるいは第2の距離測定信号を基準として、前記第2の距離測定信号あるいは第3の距離測定信号の位相が測定され、前記第1の移動局21aと前記第2の移動局21dとの間の相対距離が瞬時に高精度で算出される。
【0038】
更に、前記方向測定手段45によって、前記複数のアンテナ15a1、15a2あるいは15b1、15b2に対応して、前記方向測定信号の位相が測定され、前記第1の移動局21aと前記第2の移動局21dとの間の方向が算出され、前記距離と方向の算出結果から、前記第1の移動局21aと前記第2の移動局21dとの間の相対位置が算出され、接続端子53を介して表示手段に出力される。
なお、前記距離測定信号の位相を測定する代わりに、距離測定信号の受信信号強度(RSSI)を測定し、アンテナ間の結合損を算出することによって、前記第1の移動局21aと前記第2の移動局21dとの間の距離を測定することができる。
【0039】
図5は、本発明の安全運転支援システムの表示画面の例であり、16は表示手段、17は交通規制情報、18a〜18cは車両間隔など、21a〜21dは走行車両である。前記路側機から取得した交通規正情報17と、自車両21bを中心として、周辺の車両21a〜21d(車両ナンバーも表示)の位置、車間距離18a〜18cなどを表示する。なお、実際の表示は、多種多様なものが考えられる。
【0040】
以上の説明では、道路上を走行する車両に搭載された複数の移動局との間、路側機と移動局との間について説明したが、歩道を歩行する歩行者が携帯する携帯端末と移動局との間でも同様に走行車両の安全運転支援システムを構成することができる。
なお、前記走行車両の安全運転支援システムには、任意の数の移動局と任意の数の路側機との間でアドホックモバイルネットワークあるいは自律分散型モビアルネットワークを構成するものとする。
【0041】
また、移動局と路側機の複数のアンテナを周期的に切替ながら無線信号を送受信し、複数の伝搬経路を経由して測定した相対距離の内、比較的に短句測定したデータを選択して平均値を求めることによって、マルチパスによって生じる位置特定誤差を軽減することができる。
また、相対距離あるいは相対位置を測定する機能の他に、音声情報あるいは画像情報を含むデータ通信の機能を搭載し、あるいは協調運転、衝突防止、道路情報の転送、危険を察知した警報など、移動局間で必要な情報を交換するための機能を含めることができる。
【0042】
また、特定の路側機をノードとしてインターネット網にアクセスすることも可能とする。
また、無線信号として、超音波信号、高周波信号、もしくは光信号を用いることが可能であり、超音波信号もしくは光信号の場合には、アンテナの代わりに送受波器を用いる。
また、前記移動局が、走行距離を機械的に計測する手段、走行方向を機械的に検知する手段、地磁気センサ、加速度センサ、あるいはこれらの組合せを有する場合には、前記路側機との相対的な距離と方向との測定を補正しあるいは補完することができる。
【産業上の利用可能性】
【0043】
本発明は、上記のように構成されているため、道路脇に設置した路側機と道路上を走行する車両などに搭載した移動局との間、道路上を走行する車両などに搭載した複数の移動局の間、歩行者が携帯するRFタグあるいは携帯端末と移動局との間、あるいはこれらの組み合わせで相対距離と位置する方向とを測定し、走行車両の安全運転支援システムに利用可能である。
【0044】
また、走行する道路の交通情報、交通規制、走行する車両間の協調運転あるいは衝突防止などの情報あるいは警報を、路側機と車両間、あるいは車両と車両間で交換するための手段として用いることができる。
また、本発明は基盤技術に関するものであり、上記以外にも、色々な分野に適用できる。
【符号の説明】
【0045】
21a〜21d 移動車両
21aa〜21db 移動局
22a、22b 路側機
23a〜23f 無線信号の伝搬経路
201、202、203 走行車線の分離帯
11a、11b 制御手段
12a、12b 送信機
13a、13b 受信機
14a、14b アンテナ切替手段
15a、15b アンテナ
41 無線信号の伝搬路
【技術分野】
【0001】
この発明は、一方向通信あるいは時分割双方向通信によって、周辺に存在する走行車両との相対的な距離と方向を高精度でしかも瞬時に測定するとともに、運転席の前方部に測定した結果をリアルタイムで表示することによって、走行車両の安全運転を支援するためのシステムに関するものである。
【背景技術】
【0002】
従来から、車間距離を測定する装置、あるいは走行車両の安全運転を支援するためのシステムが提案されている。(例えば、特許文献1から5参照)
【特許文献1】特開2009−100061号
【特許文献2】特開2001−199257号
【特許文献3】特開2005−115883号
【特許文献4】特開2005−190307号
【特許文献5】特表2007−310457号
【0003】
図6は、特許文献1に記載されている従来の「ユビキタスモバイルネットワーク」の実施例である。図6において、道路の区分などを示す分離帯101、102の内側を走行する車両に搭載された複数の移動局21〜23と道路脇に設置された任意の数の路側機31、32から構成され、相互間の相対距離を瞬時に高精度で測定することによって、最適化されたユビキタスモバイルネットワークを構成することができるとされているが、走行車両の安全運転を支援するためのシステムについては言及されていない。
【0004】
特許文献2に記載されている従来の「車両用走行制御装置」では、他車両走行検出部1は、先行車両との間の距離を測定する。路車間通信部2は、自車両とその先行車両のさらに前を走行している先々行車両の位置を示す車間距離データを走行支援システムの路側機から受信し、その受信データに基いて先々行車両との間の距離を判定する。車間距離制御部5は、他車両走行検出部1から得られる先行車両との車間距離に基づいた加減速制御を行うことにより車両を先行車両に追随走行させると共に、その加減速制御を行う際に路車間通信部2から得られる先々行車両との車間距離を加味した制御を行うとされているが、先行車両との間の距離を直接測定しないので測定精度に問題がある。
【0005】
特許文献3に記載されている従来の「無線信号方式による自動車自動走行の方法」では、自動走行専用道路を,ある長さ単位で区切り、各区間に進入する車両に対し信号を発信する狭域無線通信装置を設置する。さらに、信号を系統運用する信号管制センタ−を設け、これと各区間の狭域無線通信装置とを通信回線で接続する。車両に対し走行制限速度信号を発信し、前走車両に後走車両が接近すると、後走車両に減速し走行速度を落とすように、前走車両が離れてくると加速し走行速度を上げるよに、車両の存在状態に応じて変化させる。一方、車両は自動走行に必要な各種装置を搭載し狭域無線通信装置からの受信した信号により車両の走行速度制御および進路制御を行なうとされているが、前走車両と後走車両との間の距離を直接測定しないので測定精度に問題がある。
【0006】
特許文献4に記載されている従来の「車間距離測定装置」では、車間距離測定装置が、同一の走行車線で前方を走行する車両から無線により送信された前方車両情報を受信する第1の受信手段と、道路の路側に設置された路側送信装置から無線により送信された路側送信装置情報を受信する第2の受信手段と、前方を走行する車両との車間距離を演算する演算手段と、走行速度、車間距離及び路側送信装置情報を新しい前方車両情報として、同一の走行車線で後方を走行する車両へ無線により送信する送信手段とを備えるとされているが、自車両が前記路側送信装置の前面を横切った時刻を用いることで、車間距離を直接測定しないので測定精度に問題がある。
【0007】
特許文献5に記載されている従来の「車車間通信システム、車車間通信装置、および制御装置」では、車車間通信システムにおいて、各車車間通信装置を構成する支援制御ECUは、無線機を介して、ソナーやカメラを用いて検出した移動物体の情報、およびGPSアンテナや車速センサを用いて検出した自車両の情報を、他車両に搭載された車車間通信装置に送信するとともに、他車両に搭載された車車間通信装置から送信されてくる同種の情報を受信する。そして、支援制御ECUは、右直事故支援処理にて、自車両の位置情報と無線機を介して他車両から受信した移動物体の位置情報および他車両の情報とに基づいて、移動物体が自車両にとっての危険要素であるか否かを判断し、該判断結果に応じて警告を出力するとされているが、ソナーやカメラを用いて検出した移動物体の情報、およびGPSアンテナや車速センサを用いて検出した自車両の情報を用いる点で、車間距離を直接測定しないので測定精度に問題がある。
【発明の開示】
【発明が解決しようとする課題】
【0008】
この発明は、路側機と移動局との間の距離と方向、前走車両と後走車両との間の距離と方向、自車両と両側を走行中の車両との間の距離と方向、あるいはこれらの組合せを、一方向通信あるいは時分割の双方向通信によって瞬時に測定し、自車両の位置および前後左右の車両との相対位置の関係を高精度で測位するとともに、運転席の前方部にリアルタイムで表示することによって、走行車両の安全運転支援システムを安価に提供することを目的とするものである。
【課題を解決するための手段】
【0009】
この発明に係わる走行車両の安全運転支援システムは、少なくとも、路側に設置される路側機と走行車両に搭載される移動局との間、あるいは走行車両に搭載される移動局と周辺を走行中の他の移動局との間で、少なくとも、距離測定信号と方向測定信号とを含む無線信号を、一方向通信あるいは時分割の双方向通信によって、複数のアンテナを周期的に切替えながら間欠発信し、
【0010】
前記移動局が、受信した無線信号から前記距離測定信号と方向測定信号とを再生し、前記再生した距離測定信号と方向測定信号の位相、受信信号強度(RSSI)、もしくはこれらの両方を前記複数のアンテナに対応して測定し、前記測定結果から、路側機と移動局との間の距離と方向、前走車両と後走車両との間の距離と方向、自車両と両側を走行中の車両との間の距離と方向、あるいはこれらの組合せを測定するとともに、運転席の前方部にリアルタイムで表示することを可能とする。
【発明の効果】
【0011】
本発明により、路側機と移動局との間、前走車両と後走車両との間、自車両と両側の車両との間、あるいはこれらの間の距離と方向とを、一方向通信あるいは時分割双方向通信によって瞬時にしかも高精度で測定し、自車両の位置および周辺の車両との相対位置の関係を運転席の前方部にリアルタイムで表示することによって、走行車両の安全運転支援システムを安価に構成することができる。
【図面の簡単な説明】
【0012】
【図1】68発明の第1の実施の形態による安全運転支援システムの構成図
【図2】本発明の第2の実施の形態による安全運転支援システムの構成図
【図3】本発明の安全運転支援システムの移動局の構成図
【図4】本発明の安全運転支援システムの制御手段の構成図
【図5】本発明の安全運転支援システムの表示画面の例
【図6】従来の実施例を示す構成図
【発明を実施するための最良の形態】
【0013】
この発明に係わる走行車両の安全運転支援システムは、図1および請求項1に本発明の第1の形態を示すように、無線信号を用いる走行車両の安全運転支援システムが、少なくとも、第1の走行車両の後部に搭載された第1の移動局およびダッシュボード周辺部に設けられた第1の表示手段と、第2の走行車両の前部に搭載された第2の移動局およびダッシュボード周辺部に設けられた第2の表示手段とから構成され、
前記第1の移動局が、前記第2の移動局との間の距離と、前記第2の移動局が位置する方向とを測定するための第1の発受信手段を有し、前記第2の移動局が、前記第1の移動局との間の距離と、前記第1の移動局が位置する方向とを測定するための第2の発受信手段を有する。
【0014】
前記第1の発受信手段と第2の発受信手段とが、少なくとも、前記第1の発受信手段と第2の発受信手段との間の相対的な距離を測定するための距離測定手段と、前記第1の発受信手段と第2の発受信手段との間の相対的な方向を測定するための方向測定手段とを有し、
前記第1の移動局および第2の移動局の両側において、前記相対的な距離と方向の測定結果から、前記第1の移動局と第2の移動局との間の相対的な位置関係を高精度で測位し、かつ前記第1の表示手段および第2の表示手段に前記相対的な位置関係を表示する。
【0015】
また、図5および請求項2に示すように、前記表示手段が、少なくとも、周辺に所在する走行車両との相対的な位置関係を表示し、周辺に所在する走行車両との相対距離が規定された車間距離以下である場合には警告を表示し、周辺に所在する走行車両の登録番号を表示し、あるいはこれらの組合せを表示する。
また、請求項3に示すように、前記走行車両が速度制御手段を有し、前方車両との位置関係が所定の車間距離以下である場合に、自車両の速度を制御して車間距離を所定の値内に制御する。
【0016】
また、請求項4に示すように、前記移動局が、歩道あるいは横断歩道を歩行する歩行者が携帯する無線タグとの相対的な距離と方向を測定し、前記表示手段に、少なくとも、前記歩行者との相対的な位置関係を表示する。
また、請求項5に示すように、前記移動局が、路側に設置された路側機との相対的な距離と方向とを測定し、前記表示手段に自車両の道路地図上の位置を表示する。
【0017】
また、請求項6に示すように、前記移動局が、走行距離を機械的に計測する手段、走行方向を機械的に検知する手段、あるいはこれらの両方を有し、前記路側機との相対的な距離と方向との測定を補正しあるいは補完する。
また、請求項7に示すように、前記移動局が走行車両の前部と後部に搭載されており、前部の移動局で測位した位置情報を、後部の移動局を介して後続車両に対して中継しあるいは発信する。
【0018】
(実施の形態1)
図1は本発明の第1の実施の形態による安全運転支援システムの構成図である。図1において、201、202、203は道路の区分などを示す分離帯、21a〜21dは走行車両、21aa〜21dbは移動局、22a、22bは路側機、23a〜23dは路側機と移動局と間の伝搬経路、23e、23fは移動局間の伝搬経路である。
【0019】
無線信号を用いる走行車両の安全運転支援システムが、少なくとも、走行車両21a〜21dの前方に搭載される移動局21aa〜21dbと、路側に設置される路側機22a、22bとから構成され、前記路側機22a、22bが、少なくとも、システム同期信号と、識別信号と、報知信号と、距離測定信号と、方向測定信号とを含む無線信号を、伝搬経路23a〜23dを経由して、エリア内の移動局21aa〜21dbに向けて間欠発信すると、前記移動局21aa、21ba、21ca、21daが、前記無線信号を複数のアンテナを切替ながら受信して、少なくとも、報知情報に含まれる交通情報もしくは交通規制情報を再生するとともに、前記路側機からの距離と方向とをリアルタイムで測定して、必要に応じて図5に例示する表示画面上に表示する。
【0020】
一方、各移動局は、周辺の移動局に向けて、ランダムなタイミングで一方向通信あるいは時分割双方向通信によって、少なくとも、システム同期信号と、識別信号と、距離測定信号と、方向測定信号とを含む無線信号を、複数のアンテナを周期的に切替えながら間欠的に発信を行い、相互間の距離と方向とをリアルタイムで測定して、必要に応じて図5に例示する表示画面上に表示することができる。
【0021】
(実施の形態2)
図2は本発明の第2の実施の形態による安全運転支援システムの構成図である。図2において、202、203は道路の区分などを示す分離帯、21aは前走車両、21ab〜21adは前走車両の移動局、21bは後走車両、21ba〜21bbは後走車両の移動局、23ac〜23bdは前走車両の移動局と後走車両の移動局との間の伝搬経路である。
【0022】
無線信号を用いる走行車両の安全運転支援システムが、少なくとも、前走車両21aの前方と後方とに搭載される移動局21aa〜21adと、後走車両21bの前方と後方とに搭載される移動局21ba〜21bdとから構成され、前走車両21aの後方に搭載される移動局21ac、21adと、後走車両21bの前方に搭載される移動局21ba、21bbとが相対しているものとする。
【0023】
前記前走車両21aと後走車両21bとが、同一レーンを走行しており、前記後走車両21bの前方の移動局21baが、少なくとも、システム同期信号と、識別信号と、距離測定信号と、方向測定信号とを含む無線信号を、複数のアンテナを周期的に切替えながら、前記前走車両21aの後方の移動局21ab、21adに向けてバースト信号として間欠発信すると、前記後走車両21bの前方の移動局21ba、21bbが、前記無線信号を受信して前記距離測定信号と方向測定信号とを再生し、前記距離測定信号から前走車両21aとの間の相対距離を測定し、前記方向測定信号から前走車両21aが位置する方向を測定し、前記相対距離と方向の測定結果から前記前走車両21aとの相対位置を測位するとともに、必要に応じて図5に示す表示画面上に表示することができる。
【0024】
同様にして、前記後走車両21bの前方の移動局21bbと、前記前走車両21aの後方の移動局21ac、21adとの間で、お互いの相対位置を高精度で測位すると、前走車両21aと後走車両21bとの間で合計4通りの相対位置が測位できるので、これらの内で、例えば、測定された距離が比較的に短いものを選択して平均をとると、マルチパスに影響されない高精度でかつ高信頼度の相対位置の測位が可能となる。
なお、前記移動局、路側機、もしくはこれらの両方からの間欠発信の間隔が自励発振器によって制御され、前記移動局の移動速度の変化に応じて制御され、あるいは前記移動局の移動速度が速い場合には間欠発信の間隔を狭くするよう制御されることで、お互いに衝突する確率を下げることができる。
【0025】
また、前記走行車両の移動局が図5に示す表示手段を有し、前記表示手段に、少なくとも、路側機から間欠発信される報知情報に含まれる交通規制情報を再生して表示をし、測定した路側機と移動局との相対位置から自車両の道路上の現在位置を算出して表示をし、周辺に所在する他の走行車両との位置関係を算出して表示をし、他の走行車両との相対距離が決められた車間距離以下である警告を表示しあるいは警告音を発音し、走行車両の登録番号を表示し、あるいはこれらの組合せを行うことができる。
【0026】
また、歩道あるいは横断歩道を歩行する歩行者が無線タグを携帯し、前記無線タグが、少なくとも、システム同期信号と、識別信号と、測位要求信号とを含む無線信号を、前記移動局に向けバースト信号として間欠発信し、前記無線信号を受信した移動局が、前記無線タグに向けて、起点信号を含む無線信号を発信し、前記無線タグが受信した起点信号と同期した距離測定信号と、これとは別に方向測定信号とを含む無線信号を発信し、前記移動局が、複数のアンテナを周期的に切替ながら無線信号を受信して、再生した距離測定信号の位相を前記生成した起点信号を基準として測定し、前記方向測定信号の位相を複数のアンテナに対応して測定し、前記相対距離と方向の測定結果から前記無線タグとの相対位置を測位し、測位した結果から、画面上に接近警報を表示し、あるいは警報音を発する。
【0027】
また、前記走行車両の移動局、前記歩行者が携帯する無線タグ、もしくはこれらの両方が、少なくとも交信記録もしくは警報記録を含む直前情報を記憶する記憶手段を有し、前記移動局、前記無線タグ、もしくはこれらの両方が交通事故に遭遇した際に、前記記憶手段が直前情報の記憶を保護する保護手段を有する。
また、前記路側機もしくは移動局から発信される起点信号、距離測定信号、方向測定信号、もしくはこれらの組み合わせが、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せである。
【0028】
また、前記移動局の受信機、路側機の受信機、もしくはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信機において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記相対距離の算出結果、位置する方向の算出結果、あるいはこれらの両方の結果をフイルタリングし、補正し、あるいは補完する。
【0029】
また、前記路側機の内の特定の路側機をノードとし、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動局の位置を測位するために必要な情報の交換、前記移動局の位置を測位した結果の情報の交換、あるいはこれらの両方を行なう。
また、前記移動局が大型車両に搭載されており、後続車両が乗用車の場合には、前記乗用車から路側機が見通せない場合があるので、前記移動局は、少なくとも、前記路側機から受信した報知情報と、検知した自局の位置情報とを、前記後続車両に対して中継しあるいは発信することで、後続車両に対して妨害することなく情報を伝達することができる。
【0030】
図3は本発明の安全運転支援システムの移動局の構成図であり、21aは第1の移動局、21bは第2の移動局、11a、11bは制御手段、12a、12bは送信機、13a、13bは受信機、14a、14bはアンテナ切替手段、15a、15bはアンテナ、16a、16bは表示手段、41は無線信号の伝搬路である。
第1の移動局21aと第2の移動局21bとの間の相対位置を特定するために、前記第1の移動局21aが、制御手段11aと、送信機12aと、受信機13aと、アンテナ切替手段14aと、複数のアンテナ15a1、15a2とから構成され、前記第2の移動局21bが、制御手段11bと、送信機12bと、受信機13bと、アンテナ切替手段14bと、複数のアンテナ15b1、15b2とから構成される。
【0031】
前記第2の移動局21bにおいて、送信機12bから少なくとも制御手段11bで生成した第1の距離測定信号を含む無線信号を、複数のアンテナ15b1、15b2をアンテナ切替手段14bによって周期的に切替えながらバースト信号として間欠発信し、前記第1の移動局21aにおいて、複数のアンテナ15a1、15a2をアンテナ切替手段14aによって周期的に切替えながら受信機13aで受信し、制御手段11aにおいて受信した第1の距離測定信号を再生し、前記再生した第1の距離測定信号と高精度で同期しあるいは直交した第2の距離測定信号と、これとは別に方向測定信号を生成し、前記生成した第2の距離測定信号と方向測定信号とを含む無線信号を、複数のアンテナ15a1、15a2をアンテナ切替手段14aによって周期的に切替えながら送信機12aから時分割でバースト信号として発信する。
【0032】
一方、前記第2の移動局21bにおいて、前記無線信号を、複数のアンテナ15b1、15b2をアンテナ切替手段14bによって周期的に切替えながら、受信機13bで受信し、前記制御手段11bが、前記第1の距離測定信号と方向測定信号とを再生し、自局21bで生成した第1の距離測定信号を基準として前記再生した第1の距離測定信号の位相を測定して前記第1の移動局との間の相対距離を算出し、前記複数のアンテナ15b1、15b2に対応して方向測定信号の位相差を測定して前記第1の移動局21aが位置する方向を算出し、あるいは、前記距離測定信号の位相を測定する代わりに、受信した距離測定信号の受信信号強度(RSSI)を測定し、アンテナ間の結合損を算出することによって相対距離を算出し、前記距離と方向の算出結果から前記第1の移動局21aとの相対位置を特定し、結果を表示手段16bに伝送して表示する。
【0033】
同様に、前記第2の移動局21bにおいて、引き続き、前記第2の距離測定信号と高精度で同期しあるいは直交した第3の距離測定信号を生成し、前記送信機12bから、少なくとも、前記制御手段11bにおいて生成した前記第3の距離測定信号と、別に生成した方向測定信号を含む無線信号を複数のアンテナ15b1、15b2をアンテナ切替手段14bによって周期的に切替えながらバースト信号として時分割で発信する。
【0034】
前記前記第1の移動局21aにおいて、前記無線信号を複数のアンテナ15a1、15a2をアンテナ切替手段14aによって周期的に切替えながら、受信機13aで受信し、前記制御手段11aにおいて前記第3の距離測定信号を再生し、自局21aで生成した第2の距離測定信号を基準として、前記再生した第3の距離測定信号の位相を測定して前記第2の移動局21bとの間の相対距離を算出し、前記複数のアンテナ15a1、15a2に対応して方向測定信号の位相差を測定して前記第2の移動局21bが位置する方向を算出し、あるいは、前記距離測定信号の位相を測定する代わりに、距離測定信号の受信信号強度(RSSI)を測定し、アンテナ間の結合損を算出することによって相対距離を算出し、前記距離と方向の算出結果から前記第2の移動局21bとの相対位置を特定し、結果を表示手段16aに伝送し表示する。
【0035】
なお、前記第1の移動局21aと前記第2の移動局21bとの間で位置情報を交換し、両者の平均値を求めることで、前記相対位置の算出精度を改善することが可能となる。
また、前記に引き続き、前記第1の移動局21aと前記第2の移動局21dとの間で相互通信を続けることによって、複数回の距離と方向との算出を行い、これらの平均値を求めることで、位置の算出精度の改善が可能となる。
また、前記第1〜第3の距離測定信号、方向測定信号、あるいはこれらの組み合わせが、法令により許容される周波数の範囲内であり、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの任意の組み合わせである。
【0036】
図4は本発明の安全運転支援システムの制御手段の構成図であり、11a、11bは制御手段、41は基準発振器、42は測定信号生成手段、43は測定信号再生手段、44は距離測定手段、45は方向測定手段、46は位置算出手段、51、50は接続端子である。
前記測定信号生成手段42によって、少なくとも、システム同期信号と、マックレイヤと、第1〜第3の距離測定信号と、方向測定信号が生成され、接続端子51を介して図3に示す送信機12a、12bに供給され、その内の第1と第2の距離測定信号は、距離測定のための基準として、別途、前記距離測定手段44にも供給される。
【0037】
一方、図3に示す受信機13a、13bによって受信される無線信号は、直接あるいは中間周波信号に変換され、接続端子52を介して前記測定信号再生手段43に供給され、前記距離測定信号および方向測定信号が再生され、前記距離測定手段44および方向測定手段45に供給され、前記距離測定手段44によって、前記第1の距離測定信号あるいは第2の距離測定信号を基準として、前記第2の距離測定信号あるいは第3の距離測定信号の位相が測定され、前記第1の移動局21aと前記第2の移動局21dとの間の相対距離が瞬時に高精度で算出される。
【0038】
更に、前記方向測定手段45によって、前記複数のアンテナ15a1、15a2あるいは15b1、15b2に対応して、前記方向測定信号の位相が測定され、前記第1の移動局21aと前記第2の移動局21dとの間の方向が算出され、前記距離と方向の算出結果から、前記第1の移動局21aと前記第2の移動局21dとの間の相対位置が算出され、接続端子53を介して表示手段に出力される。
なお、前記距離測定信号の位相を測定する代わりに、距離測定信号の受信信号強度(RSSI)を測定し、アンテナ間の結合損を算出することによって、前記第1の移動局21aと前記第2の移動局21dとの間の距離を測定することができる。
【0039】
図5は、本発明の安全運転支援システムの表示画面の例であり、16は表示手段、17は交通規制情報、18a〜18cは車両間隔など、21a〜21dは走行車両である。前記路側機から取得した交通規正情報17と、自車両21bを中心として、周辺の車両21a〜21d(車両ナンバーも表示)の位置、車間距離18a〜18cなどを表示する。なお、実際の表示は、多種多様なものが考えられる。
【0040】
以上の説明では、道路上を走行する車両に搭載された複数の移動局との間、路側機と移動局との間について説明したが、歩道を歩行する歩行者が携帯する携帯端末と移動局との間でも同様に走行車両の安全運転支援システムを構成することができる。
なお、前記走行車両の安全運転支援システムには、任意の数の移動局と任意の数の路側機との間でアドホックモバイルネットワークあるいは自律分散型モビアルネットワークを構成するものとする。
【0041】
また、移動局と路側機の複数のアンテナを周期的に切替ながら無線信号を送受信し、複数の伝搬経路を経由して測定した相対距離の内、比較的に短句測定したデータを選択して平均値を求めることによって、マルチパスによって生じる位置特定誤差を軽減することができる。
また、相対距離あるいは相対位置を測定する機能の他に、音声情報あるいは画像情報を含むデータ通信の機能を搭載し、あるいは協調運転、衝突防止、道路情報の転送、危険を察知した警報など、移動局間で必要な情報を交換するための機能を含めることができる。
【0042】
また、特定の路側機をノードとしてインターネット網にアクセスすることも可能とする。
また、無線信号として、超音波信号、高周波信号、もしくは光信号を用いることが可能であり、超音波信号もしくは光信号の場合には、アンテナの代わりに送受波器を用いる。
また、前記移動局が、走行距離を機械的に計測する手段、走行方向を機械的に検知する手段、地磁気センサ、加速度センサ、あるいはこれらの組合せを有する場合には、前記路側機との相対的な距離と方向との測定を補正しあるいは補完することができる。
【産業上の利用可能性】
【0043】
本発明は、上記のように構成されているため、道路脇に設置した路側機と道路上を走行する車両などに搭載した移動局との間、道路上を走行する車両などに搭載した複数の移動局の間、歩行者が携帯するRFタグあるいは携帯端末と移動局との間、あるいはこれらの組み合わせで相対距離と位置する方向とを測定し、走行車両の安全運転支援システムに利用可能である。
【0044】
また、走行する道路の交通情報、交通規制、走行する車両間の協調運転あるいは衝突防止などの情報あるいは警報を、路側機と車両間、あるいは車両と車両間で交換するための手段として用いることができる。
また、本発明は基盤技術に関するものであり、上記以外にも、色々な分野に適用できる。
【符号の説明】
【0045】
21a〜21d 移動車両
21aa〜21db 移動局
22a、22b 路側機
23a〜23f 無線信号の伝搬経路
201、202、203 走行車線の分離帯
11a、11b 制御手段
12a、12b 送信機
13a、13b 受信機
14a、14b アンテナ切替手段
15a、15b アンテナ
41 無線信号の伝搬路
【特許請求の範囲】
【請求項1】
無線信号を用いる走行車両の安全運転支援システムが、少なくとも、第1の走行車両の後部に搭載された第1の移動局およびダッシュボード周辺部に設けられた第1の表示手段と、第2の走行車両の前部に搭載された第2の移動局およびダッシュボード周辺部に設けられた第2の表示手段とから構成され、
前記第1の移動局が、前記第2の移動局との間の距離と、前記第2の移動局が位置する方向とを測定するための第1の発受信手段を有し、前記第2の移動局が、前記第1の移動局との間の距離と、前記第1の移動局が位置する方向とを測定するための第2の発受信手段を有し、
前記第1の発受信手段と第2の発受信手段とが、少なくとも、前記第1の発受信手段と第2の発受信手段との間の相対的な距離を測定するための距離測定手段と、前記第1の発受信手段と第2の発受信手段との間の相対的な方向を測定するための方向測定手段とを有し、
前記第1の移動局および第2の移動局の両側において、前記相対的な距離と方向の測定結果から、前記第1の移動局と第2の移動局との間の相対的な位置関係を測位し、かつ前記第1の表示手段および第2の表示手段に前記相対的な位置関係を表示することを特徴とする走行車両の安全運転支援システム。
【請求項2】
前記表示手段が、少なくとも、周辺に所在する走行車両との相対的な位置関係を表示し、周辺に所在する走行車両との相対距離が規定された車間距離以下である場合には警告を表示し、周辺に所在する走行車両の登録番号を表示し、あるいはこれらの組合せを表示することを特徴とする請求項第1項に記載する走行車両の安全運転支援システム。
【請求項3】
前記走行車両が速度制御手段を有し、前方車両との位置関係が所定の車間距離以下である場合に、時車両の速度を制御して車間距離を所定の値内に制御することを特徴とする請求項第1項に記載する走行車両の安全運転支援システム。
【請求項4】
前記移動局が、歩道あるいは横断歩道を歩行する歩行者が携帯する無線タグとの相対的な距離と方向を測定し、前記表示手段に、少なくとも、前記歩行者との相対的な位置関係を表示することを特徴とする請求項第2項に記載する走行車両の安全運転支援システム。
【請求項5】
前記移動局が、路側に設置された路側機との相対的な距離と方向とを測定し、前記表示手段に自車両の道路地図上の位置を表示することを特徴とする請求項第2項に記載する走行車両の安全運転支援システム。
【請求項6】
前記移動局が、走行距離を機械的に計測する手段、走行方向を機械的に検知する手段、あるいはこれらの両方を有し、前記路側機との相対的な距離と方向との測定を補正しあるいは補完することを特徴とする請求項第5項に記載する走行車両の安全運転支援システム。
【請求項7】
前記移動局が走行車両の前部と後部に搭載されており、前部の移動局で測位した位置情報を、後部の移動局を介して後続車両に対して中継しあるいは発信することを特徴とする請求項第1項に記載する走行車両の安全運転支援システム。
【請求項1】
無線信号を用いる走行車両の安全運転支援システムが、少なくとも、第1の走行車両の後部に搭載された第1の移動局およびダッシュボード周辺部に設けられた第1の表示手段と、第2の走行車両の前部に搭載された第2の移動局およびダッシュボード周辺部に設けられた第2の表示手段とから構成され、
前記第1の移動局が、前記第2の移動局との間の距離と、前記第2の移動局が位置する方向とを測定するための第1の発受信手段を有し、前記第2の移動局が、前記第1の移動局との間の距離と、前記第1の移動局が位置する方向とを測定するための第2の発受信手段を有し、
前記第1の発受信手段と第2の発受信手段とが、少なくとも、前記第1の発受信手段と第2の発受信手段との間の相対的な距離を測定するための距離測定手段と、前記第1の発受信手段と第2の発受信手段との間の相対的な方向を測定するための方向測定手段とを有し、
前記第1の移動局および第2の移動局の両側において、前記相対的な距離と方向の測定結果から、前記第1の移動局と第2の移動局との間の相対的な位置関係を測位し、かつ前記第1の表示手段および第2の表示手段に前記相対的な位置関係を表示することを特徴とする走行車両の安全運転支援システム。
【請求項2】
前記表示手段が、少なくとも、周辺に所在する走行車両との相対的な位置関係を表示し、周辺に所在する走行車両との相対距離が規定された車間距離以下である場合には警告を表示し、周辺に所在する走行車両の登録番号を表示し、あるいはこれらの組合せを表示することを特徴とする請求項第1項に記載する走行車両の安全運転支援システム。
【請求項3】
前記走行車両が速度制御手段を有し、前方車両との位置関係が所定の車間距離以下である場合に、時車両の速度を制御して車間距離を所定の値内に制御することを特徴とする請求項第1項に記載する走行車両の安全運転支援システム。
【請求項4】
前記移動局が、歩道あるいは横断歩道を歩行する歩行者が携帯する無線タグとの相対的な距離と方向を測定し、前記表示手段に、少なくとも、前記歩行者との相対的な位置関係を表示することを特徴とする請求項第2項に記載する走行車両の安全運転支援システム。
【請求項5】
前記移動局が、路側に設置された路側機との相対的な距離と方向とを測定し、前記表示手段に自車両の道路地図上の位置を表示することを特徴とする請求項第2項に記載する走行車両の安全運転支援システム。
【請求項6】
前記移動局が、走行距離を機械的に計測する手段、走行方向を機械的に検知する手段、あるいはこれらの両方を有し、前記路側機との相対的な距離と方向との測定を補正しあるいは補完することを特徴とする請求項第5項に記載する走行車両の安全運転支援システム。
【請求項7】
前記移動局が走行車両の前部と後部に搭載されており、前部の移動局で測位した位置情報を、後部の移動局を介して後続車両に対して中継しあるいは発信することを特徴とする請求項第1項に記載する走行車両の安全運転支援システム。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−210250(P2011−210250A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2011−50047(P2011−50047)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(395007299)有限会社アール・シー・エス (51)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成23年3月8日(2011.3.8)
【出願人】(395007299)有限会社アール・シー・エス (51)
【Fターム(参考)】
[ Back to top ]