
走行車両
【課題】軌道用走行車輪が走行中にレールから浮き上がることを防止する。
【解決手段】
レールに接地させた一対の道路走行用タイヤ4,4が空転しているか否かを判定する空転判定手段90と、空転判定手段が空転していると判定した場合に、レールに接地させた一対の道路走行用タイヤに隣接する一対の軌道走行用車輪6,6の輪重を予め定められた下限値を限度として低減し、空転していないと判定した場合に、一対の軌道走行用車輪の輪重を高めるように輪重を制御する輪重制御手段90とを備え、油圧回路100は、一対の軌道走行用車輪の輪重を制御する油圧シリンダ8,8に対して車輪下降圧力を付与する油圧経路に設けられ、輪重の下限値に相当する圧力以下の圧力で内部に作動油を貯留可能なである、油圧シリンダの圧力低下防止用のアキュムレータ137を有する構成とした。
【解決手段】
レールに接地させた一対の道路走行用タイヤ4,4が空転しているか否かを判定する空転判定手段90と、空転判定手段が空転していると判定した場合に、レールに接地させた一対の道路走行用タイヤに隣接する一対の軌道走行用車輪6,6の輪重を予め定められた下限値を限度として低減し、空転していないと判定した場合に、一対の軌道走行用車輪の輪重を高めるように輪重を制御する輪重制御手段90とを備え、油圧回路100は、一対の軌道走行用車輪の輪重を制御する油圧シリンダ8,8に対して車輪下降圧力を付与する油圧経路に設けられ、輪重の下限値に相当する圧力以下の圧力で内部に作動油を貯留可能なである、油圧シリンダの圧力低下防止用のアキュムレータ137を有する構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路走行と軌道走行とを可能とする走行車両に関するものである。
【背景技術】
【0002】
現在、鉄道と道路とのシームレス化を行って鉄道車両とバスの双方の利点を生かす交通システムを構築する目的で、車体の前後にタイヤ用車軸を介して設けられた道路走行用のゴムタイヤと、車体の前後にガイド輪用車軸を介して設けられた軌道走行用のガイド輪と、を備えた軌道走行と道路走行との双方が可能な車両(以下「デュアルモード車両」という)が提案されている。
【0003】
上記デュアルモード車両は、軌道走行時には油圧シリンダにより、前後の軌道走行用のガイド輪を下降させてレールに乗せ、且つ、エンジンからトルクが付与される後方ゴムタイヤ(駆動輪)のみがレールに当接する高さに調節し、前後のガイド輪によりレールに追従走行すると共に前方ゴムタイヤを浮かせて後方ゴムタイヤのみにより走行駆動力を生じていた。
【0004】
そして、このデュアルモード車両では、後方ゴムタイヤの空転を検出すると共に後方ガイド輪を昇降させる油圧シリンダに付与する油圧を油圧回路により制御して、後方ゴムタイヤがレール上で空転せず且つ後方ガイド輪がレールから逸脱しないように、後方ガイド輪の軸重と後方ゴムタイヤの軸重との間で車両後部の荷重を適宜分配していた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3671186号公報
【特許文献2】特開平07−9826号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記油圧回路による制御(以下、輪重制御という)では、後方ゴムタイヤの空転の発生を検出すると、後方ガイド輪の軸重を低減して後方ゴムタイヤの接地圧を高めて空転を解消し、空転が検出されない場合には後方ガイド輪の軸重を高めてレール走行の追従性を高めるよう制御が行われる。
かかる輪重制御における油圧の増減の応答性は、油圧供給源となる油圧ポンプの性能に依存しており、輪重制御の場合には追従性に問題を生じないようになっている。ところが、例えば、レール上に異物(例えば、降雪による雪の塊等)が存在し、これに後方ゴムタイヤが乗り上げた場合などには、油圧ポンプによる作動油の供給が間に合わず、後方ガイド輪は急な車体の上昇に追従できなくなり、レールから浮いてしまう可能性があった。
【0007】
かかる問題に対して、車体の前後それぞれにゴムタイヤとガイド輪とを備える軌陸車の分野において、ガイド輪の浮きの発生の対策として、ガイド輪を昇降させる油圧シリンダにアキュムレータを併設することが提案されている(例えば、特許文献2参照)。
即ち、この軌陸車では、ガイド輪が所定の接地圧でレールに接地した状態で油圧シリンダに対する油圧供給を遮断し、前後のゴムタイヤと前後のガイド輪とでレール走行を行っているが、上記のように,車体が何らかの要因で押し上げられると、油圧シリンダに対して、アキュムレータから作動油が供給されて速やかにガイド輪を下降させ、浮き上がりの防止を図っている。
【0008】
しかしながら、特許文献2の軌陸車では、レール走行時には油圧シリンダに対する油圧の供給を遮断し、油圧シリンダは一定の出力でガイド輪をレール側に圧接させた状態に維持され、この状態でアキュムレータの排出圧力をもってガイド輪を下降させるものである。
一方、前述したデュアルモード車両の輪重制御では、ガイド輪を昇降させる油圧シリンダの油圧圧力を後方ゴムタイヤの空転の有無に応じて絶えず変動制御することから、油圧回路内の圧力も絶えず変化を生じ、上記軌陸車の技術をそのまま転用することはできなかった。
【0009】
本発明は、デュアルモード車両において、輪重制御を行いつつ、レールに接するガイド輪の浮き上がりの発生を防止することをその目的とする。
【課題を解決するための手段】
【0010】
請求項1記載の発明は、
車体の前側と後側の各々に設けられた一対の軌道走行用車輪と、
車体の前側と後側の各々に設けられた一対の道路走行用タイヤと、
前記前側と後側の一対の軌道走行用車輪をそれぞれ昇降させる前側と後側の昇降用の油圧シリンダと、
前記油圧シリンダに作動油を供給する油圧回路と、
を備え、
前記油圧シリンダにより、前記前側と後側の一対の軌道走行用車輪を上昇させて前記道路走行用タイヤのみで走行を行う道路走行モードと、前記前側と後側の一対の軌道走行用車輪を下降させて当該軌道走行用車輪と前後いずれか一対の道路走行用タイヤとがレールに接地させた状態で走行を行う軌道走行モードとを切り替え可能な走行車両であって、
前記レールに接地させた一対の道路走行用タイヤが空転しているか否かを判定する空転判定手段と、
前記空転判定手段が空転していると判定した場合に、前記レールに接地させた一対の道路走行用タイヤに隣接する前記一対の軌道走行用車輪の輪重を予め定められた下限値を限度として低減し、空転していないと判定した場合に、前記一対の軌道走行用車輪の輪重を高めるように、前記油圧シリンダの出力を制御する輪重制御手段とを備え、
前記油圧回路は、前記一対の軌道走行用車輪の輪重を制御する油圧シリンダに対して車輪下降圧力を付与する油圧経路に設けられ、前記輪重の下限値に相当する圧力以下の圧力で内部に作動油を貯留可能である、前記油圧シリンダの圧力低下防止用のアキュムレータを有することを特徴とする。
【0011】
請求項2記載の発明は、請求項1記載の発明と同様の構成を備えると共に、前記一対の軌道走行用車輪の輪重を制御する油圧シリンダは、車輪下降時に作動油が供給される貯留部と車輪上昇時に作動油が供給される貯留部とを備える複動式であって、
前記油圧回路は、前記油圧シリンダの車輪下降時に作動油が供給される貯留部から作動油を作動油タンクに直接的に戻すために、絞り弁が介在しない戻し経路を備えていることを特徴とする。
【0012】
請求項3記載の発明は、請求項1又は2記載の発明と同様の構成を備えると共に、前記一対の軌道走行用車輪にバネ式のサスペンションを併設したことを特徴とする。
【発明の効果】
【0013】
請求項1記載の発明は、軌道走行モードにおいて、レールに接地する一対の道路走行用タイヤとこれに隣接する一対の軌道走行用車輪との間で、道路走行用タイヤの空転の有無に応じて相互の輪重を調整する輪重制御を行うことで、空転の発生を極力抑えつつ、軌道走行用車輪の輪重抜けを防止することが可能である。
そして、輪重制御を実行するための油圧回路において、一対の軌道走行用車輪の昇降を行う油圧シリンダに当該油圧シリンダの圧力低下防止用のアキュムレータを併設したので、道路走行用タイヤがレール上の段差となる何らかの障害物などに乗り上げて車体の浮き上がりが生じた場合に、アキュムレータが蓄積した作動油を速やかに放出することで油圧シリンダへの供給圧力の低下を速やかに解消し、一対の軌道走行用車輪を速やかに下降させることができるため、当該車輪の浮き上がりを防止することができ、走行安定性の向上を図ることが可能となる。
また、油圧回路は輪重制御を行うことで、油圧シリンダへの供給圧力が常に制御に応じて変動するが、アキュムレータは輪重制御における輪重の下限値に相当する圧力(輪重の下限値を得るために油圧シリンダに供給する圧力)以下で作動油を貯留可能とすることから、油圧回路内の圧力変動の影響を受けることなく常に作動油を貯留することができ、輪重制御の実施している場合でも常にアキュムレータを作動させることができ、常に軌道走行用車輪の浮き上がりを防止することが可能である。
【0014】
請求項2記載の発明は、軌道走行用車輪の輪重を制御する油圧シリンダの車輪上昇時に作動油が供給される貯留部から作動油を作動油タンクに直接的に戻すために、絞り弁が介在しない戻し経路を備えるので、アキュムレータから油圧シリンダの車輪下降時に作動油が供給される貯留部に作動油の圧力が付与された場合に、車輪上昇時に作動油が供給される貯留部側から作動油を速やかに排出することが可能となり、車体の浮き上がりの発生時により速やかに軌道走行輪を下降させることが可能となる。
【0015】
請求項3記載の発明は、一対の軌道走行用車輪にバネ式のサスペンションを併設したので、油圧回路に設けたアキュムレータが輪重の下限値に相当する圧力以下で作動油を貯留可能としたことにより、アキュムレータによる振動吸収効果が十分に得られない場合であっても、サスペンションが車体の振動を吸収し、乗り心地や走行性の安定化を向上することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明における実施の形態に係るデュアルモード車両の主要な構成要素を表し、図1(A)はその側面図、図1(B)はその平面図である。
【図2】デュアルモード車両の制御系を示すブロック図である。
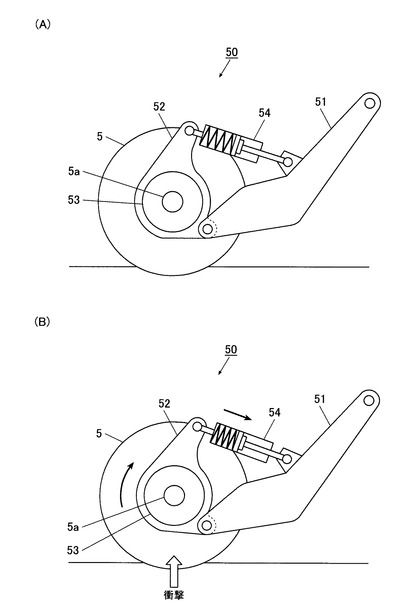
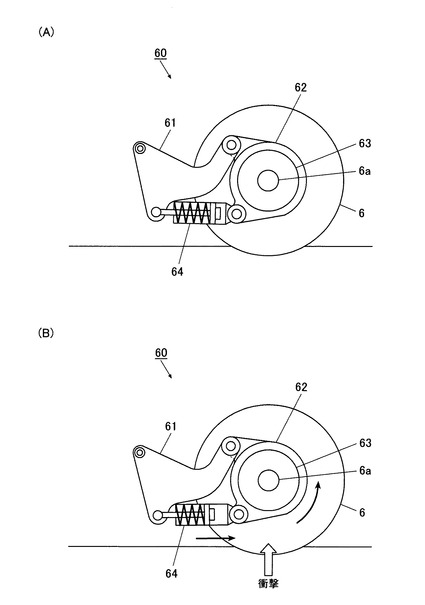
【図3】図3(A)は前方ガイド輪の支持機構の側面図、図3(B)は後方ガイド輪の支持機構の側面図である。
【図4】図4(A)は前方ガイド輪の支持機構の通常時の状態を示し、図4(B)は衝撃発生時の状態を示す説明図である。
【図5】図5(A)は後方ガイド輪の支持機構の通常時の状態を示し、図5(B)は衝撃発生時の状態を示す説明図である。
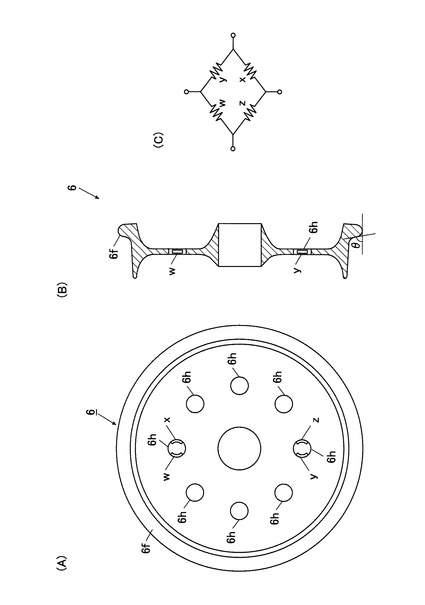
【図6】デュアルモード車両における輪重計測用の後方ガイド輪(車輪)を示し、図6(A)はその側面図、図6(B)はその断面図、図6(C)は後方ガイド輪に設けられたひずみゲージの回路構成図である。
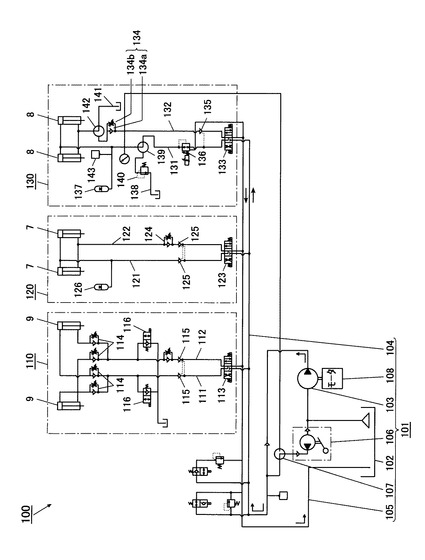
【図7】デュアルモード車両の油圧回路図である。
【図8】デュアルモード車両の輪重制御におけるフローチャートである。
【図9】図9(A)は通常の走行状態における油圧の伝達状態を示し,図9(B)は車体が押し上げられたときの油圧の伝達状態を示す。
【図10】図10(A)は後方ゴムタイヤがレール上で積雪などの障害物に乗り上げた瞬間の状態を示し、図10(B)は車体が押し上げられた時の後方ガイド輪の動作状態を示す。
【発明を実施するための形態】
【0017】
[発明の実施の形態の概要]
本発明における実施形態である走行車両としてのデュアルモード車両1について、図1から図10を参照しながら説明する。
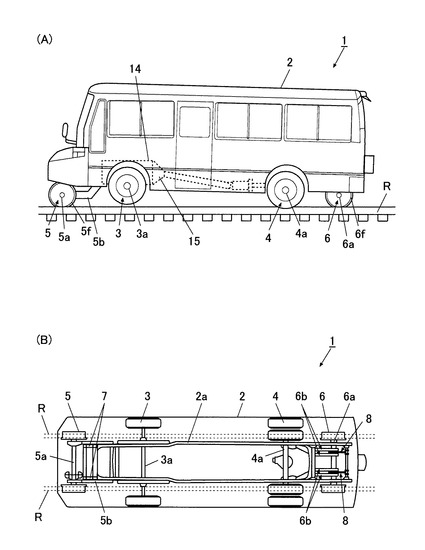
本実施の形態に係るデュアルモード車両1は、図1及び図2に示すように、車体2、車体2の下部における前側及び後側に配設されたゴムタイヤ用車軸3a,4aを中心に回転する一対の道路走行用タイヤとしての前方ゴムタイヤ3及び後方ゴムタイヤ4、車軸方向における内側にフランジ部5f,6fを備え、車体2の前側及び後側にアーム5b,6bを介して昇降自在に配設されたガイド輪用車軸5a,6aを中心に回転する一対の軌道走行用車輪としての前方ガイド輪5及び後方ガイド輪6、前方ガイド輪5及び後方ガイド輪6を上昇下降させるための昇降用のアクチュエータとしての昇降用油圧シリンダ7,8、前方ゴムタイヤ3を上昇下降させるための昇降用のアクチュエータとしての昇降用油圧シリンダ9、昇降用油圧シリンダ7,8等に油圧を供給する油圧回路100、後側のガイド輪用車軸6aに設けられデュアルモード車両1の走行速度を検出する車速センサ11、後方ゴムタイヤ4の回転速度を検出するタイヤ回転速度センサ12、後方ゴムタイヤ4にかかる重量を測定するためのポテンショメータ13、後方ゴムタイヤ4の駆動源としてのエンジン14、トルク伝達機構としてのトランスミッション15、差動装置(図示略)、サスペンション装置ブレーキ装置(図示略)、上記各構成を制御する制御装置90等を備えて構成されている。
【0018】
また、デュアルモード車両1には、運転席の各操縦装置や操作入力を行うスイッチ類等をはじめとする運転及び制御に必要な装置は当然備えられており、必要に応じて、ATSや防護無線等の安全確保に必要な装置、車内放送や戸締め装置等の接客サービスに必要な装置、無線装置やGPS等の運行管理に用いる装置、自車両と他車両を連結する連結器、連結する際にトランスミッション15と差動装置の間で駆動力を断接する断接装置も備えている。
【0019】
なお、デュアルモード車両1は、車体2にマイクロバスの車体を採用しており、運転士を含めて29人程度を搭乗させることができる。また、エンジン、及び差動装置については、道路走行を行う一般的な自動車が備える一般的なものが使用されている。そのため、従来の鉄道車両の全体重量が約40トンであるのに対し、本実施の形態に係るデュアルモード車両1の全体重量は6トン程度と軽量である。
【0020】
上記の概略構成において、デュアルモード車両1は、道路走行時には、昇降用油圧シリンダ7,8により前方ガイド輪5及び後方ガイド輪6が路面に接触しない高さまで上昇させて退避し、前方ゴムタイヤ3及び後方ゴムタイヤ4のみにより走行を行う(以下、道路走行モードという)。この場合、後方ゴムタイヤ4が駆動輪となってデュアルモード車両1の走行駆動を行い、前方ゴムタイヤ3が操舵輪となって車両の進行方向を操舵する。
また、軌道走行時には、昇降用油圧シリンダ7,8により前方ガイド輪5及び後方ガイド輪6がレール上に接すると共に、前方ゴムタイヤ3がレールの踏面よりも上方に退避するように前方ガイド輪5及び後方ガイド輪6を押し下げる。また、この時、前方ゴムタイヤ3がレールに接しないように昇降用油圧シリンダ9により上方に引き上げる。そして、後方ゴムタイヤ4と前方ガイド輪5及び後方ガイド輪6とにより走行を行う(以下、軌道走行モードという)。
この場合、前方ガイド輪5及び後方ガイド輪6に形成されたフランジ部5f,6fがレールに沿った走行状態を維持し、後方ゴムタイヤ4が駆動輪となってデュアルモード車両1の走行駆動を行う。
また、このデュアルモード車両1では、上記の通り、軌道走行モードにおいて、車両の後部では、後方ゴムタイヤ4と後方ガイド輪6の両方がレールに接地して走行を行うことを前提とするので、後方ゴムタイヤ4による走行駆動力が得られ且つ後方ガイド輪6によるレールに沿った走行を維持できる接地圧(輪重)が得られるように、これらの輪重の配分を調節する必要があり、このため、軌道走行モードでは、制御装置90が昇降用油圧シリンダ8の油圧を制御する輪重制御を行っている。
このような前提を踏まえた上で、デュアルモード車両1の各構成について、以下にその詳細を説明する。
【0021】
[前方及び後方のゴムタイヤ]
前方ゴムタイヤ3は、車体2の運転席のハンドルにより操舵することができる。後方ゴムタイヤ4は、後方ゴムタイヤ用車軸4aに左右2本ずつ軸支され、エンジン14及びトランスミッション15等によって駆動される。即ち、かかる後方ゴムタイヤ4が「トルク伝達が行われる一対の道路走行用タイヤ」に相当する。
【0022】
[前方ガイド輪及び後方ガイド輪]
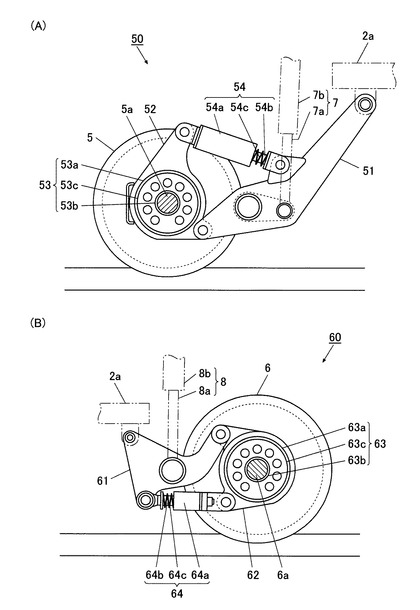
前方ガイド輪5及び後方ガイド輪6は鉄等の金属で構成され、それぞれ図3(A)と図3(B)とに例示するように、昇降用油圧シリンダ7,8の伸縮によりこれらのガイド輪5,6をそれぞれ上方及び下方に移動させるための支持機構50,60に支持されている。
左右一対の前方ガイド輪5,5は、ガイド輪用車軸5aの両端部に保持されており、当該ガイド輪用車軸5aは支持機構50を介して車体2のシャーシ部2aの前側下部に支持されている。
この支持機構50は、シャーシ部2aの前側端部の左右両側の下面において回動可能に装備された一対の腕部51と、各腕部51の回動端部に一端部が連結されたリンク体52と、リンク体52の他端部と腕部51の中間部とを連結するバネ式のサスペンション54とを備えている。
【0023】
一対の腕部51,51は、車軸5aを平行な横棒により連結されて,シャーシ部2aに対して一体的に回動を行うようになっており、各腕部51,51の回動端部近傍は、それぞれ左右の昇降用油圧シリンダ7,7のロッド7aが連結されている。これにより、腕部51の回動端部側でリンク体52を介して保持される前方ガイド輪5の昇降を可能としている。
【0024】
一対のリンク体52,52はいずれもその中央部に円形の緩衝装置53を擁している。この緩衝装置53は、リンク体52に固定保持される金属製の外輪53aと、図示しない軸受けを介してガイド輪用車軸5aの一端部を回転可能に支持する内輪53bと、外輪53aと内輪53bとの間に介挿されたゴム等の伸縮可能な弾性素材からなる緩衝体53cとを備えており、この緩衝体53cの弾性によりガイド輪用車軸5aからリンク体52への振動、衝撃等の伝達を緩和してしている。また、この緩衝体53cは、その円周に沿って内輪53bの周囲に複数の貫通穴が形成されており、各貫通穴の分布によってガイド輪用車軸5aを中心とする各方向への緩衝性の強弱が調整されている。
【0025】
サスペンション54は、リンク体52の他端部に回動可能に連結されたシリンダ54aと、当該シリンダ54aに挿入されて往復動作が可能なロッド54bと、シリンダ54aとロッド54bの間に介挿されて両端部がそれぞれに連結されたコイルバネ54cとを備えている。このコイルバネ54cは、ロッド54bの往復の双方向の動作に対して弾性的な抵抗力を付与するようになっている。
そして、ロッド54bの突出端部は、腕部51の中間部近傍に対して回動可能に連結されている。
かかる構成からなる支持機構50は、サスペンション54のロッド54bをシリンダ54aに対する滑り対偶、腕部51とリンク体52とサスペンション54のシリンダ54aとを回り対偶と見なすことにより、四節リンク構造(スライダクランク構造)を採っている。
【0026】
そして、図4(A)に示すように、ガイド輪用車軸5aは、リンク体52において、腕部51側の連結端部とサスペンション54側の連結端部とを結ぶ直線に対して前方にずれた位置で保持されている。
このため、図4(B)に示すように、前方ガイド輪5がレールから衝撃等を受けると、リンク体52の上端部(他端部)が腕部51側に揺動し、サスペンション54が収縮する。このため、衝撃のエネルギーはサスペンション54のコイルバネ54cの圧縮により消費され、シャーシ部2a側への伝達が緩和されるようになっている。
【0027】
また、図5(A)に示すように、左右一対の後方ガイド輪6,6は、ガイド輪用車軸6aの両端部に保持されており、当該ガイド輪用車軸6aは支持機構60を介して車体2のシャーシ部2aの後側下部に支持されている。
この支持機構60は、前述した支持機構50と基本構造が同じなので、専ら異なる点についてのみ説明し、同一部分については説明を簡略化する。
即ち、支持機構60は、シャーシ部2aの後側端部の左右両側の下面において回動可能に装備された一対の腕部61と、各腕部61の回動端部に一端部が連結されたリンク体62と、リンク体62の他端部と腕部61の中間部とを連結するバネ式のサスペンション64とを備えている。
【0028】
一対の腕部61,61は、一対の腕部51,51と形状は異なるがは、互いに横棒で一体的に連結され、左右の昇降用油圧シリンダ8,8により回動して後方ガイド輪6,6の昇降を行う点は同じである。
また、一対のリンク体62,62は前述した緩衝装置53と同一構造の緩衝装置63を介してガイド輪用車軸6aを保持している。
【0029】
上記リンク体62は、その上側の端部が腕部61の先端部に連結されており、下側の端部がサスペンション64のシリンダ64aと連結されている。また、サスペンション64のロッド64bは、腕部61の中間近傍に回動可能に連結されており、コイルバネ64cは、ロッド64bの往復の双方向の動作に対して弾性的な抵抗力を付与するようになっている。
そして、かかる構成からなる支持機構60も、サスペンション64のロッド64bをシリンダ64aに対する滑り対偶、腕部61とリンク体62とサスペンション64のシリンダ64aとを回り対偶と見なすことにより、四節リンク構造(スライダクランク構造)を採っている。
【0030】
そして、図5(A)に示すように、ガイド輪用車軸6aも、リンク体62において、腕部61側の連結端部とサスペンション64側の連結端部とを結ぶ直線に対して後方にずれた位置で保持されている。
このため、図5(B)に示すように、後方ガイド輪6がレールから衝撃等を受けると、リンク体62の下端部(他端部)が腕部61の逆側に揺動し、サスペンション64が伸長する。このため、衝撃のエネルギーはサスペンション64の伸長により消費され、シャーシ部2a側への伝達が緩和されるようになっている。
【0031】
[後方ガイド輪の輪重検出]
デュアルモード車両1の制御装置90は、前述したように、一対の後方ゴムタイヤ4と一対の後方ガイド輪6との間で相互の輪重の配分を適正範囲に制御する輪重制御を行う。
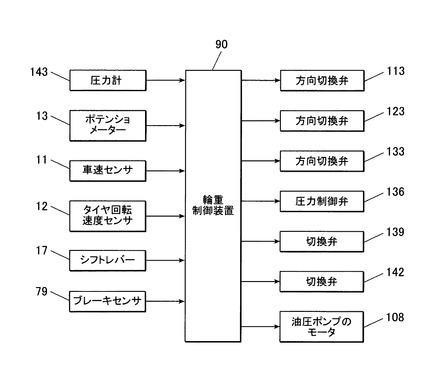
一対の後方ゴムタイヤ4と一対の後方ガイド輪6の間の輪重の配分は、後方ガイド輪の昇降を行う昇降用油圧シリンダ8の出力により変動する。このため、図2に示すように、デュアルモード車両1は、後方ガイド輪6の輪重を検出するために、昇降用油圧シリンダ8の油圧の圧力を検出する圧力計143を備えている。
即ち、このデュアルモード車両1は、軌道走行時には、後方ガイド輪6がレールに対して接地圧を生じるように、昇降用油圧シリンダ8に対して後方ガイド輪6を下降させる方向に油圧を付与する。そして、後方ガイド輪6がレールに接地している状態において、後方ガイド輪6の輪重と昇降用油圧シリンダ8への油圧の圧力との間には一定の対応関係が成立している。従って、この対応関係を示すデータテーブルを制御装置90の有する記憶メモリ内に用意しておくことで、上記圧力計143の検出する昇降用油圧シリンダ8への油圧の圧力値からデータテーブルを参照して、後方ガイド輪6の輪重を求めることが可能となる。つまり、圧力計143は、後方ガイド輪6の軸重を検出する軸重検出手段として機能する。
【0032】
上記のデータテーブルは、実際の運行時以外の時に試験的な計測を行うことで取得される。
例えば、図6に示すように、後方ガイド輪用車軸6aの周囲にその円周に沿って複数の孔6hが設けられた輪重の測定用の車輪を通常の後方ガイド輪6に替えて車軸6aに取り付けて、昇降用油圧シリンダ8の油圧の圧力を微小間隔で変化させつつ、輪重の計測を行う。
この輪重測定用の後方ガイド輪6は、対角配置された二つの孔6hにひずみゲージw,x,y,zが貼付けられ、例えば図6(C)のように配線されて後方ガイド輪6が受けている輪重を測定することが可能となる。出力される信号は、後方ガイド輪6の回転に伴って変動する正弦波状の波形となり、その極大値が輪重の値を表していると言える。なお、図6(A)に示したひずみゲージが設けられていない孔6hを用いて図6(C)と同様に配線し輪重測定の回路を構成しても良い。その場合、それぞれ位相の異なる波形を記録することができ、瞬間的な輪重の変動をより正確に補足することができる。
【0033】
なお、昇降用油圧シリンダ8の油圧の圧力の調節は、圧力計143の検出により行われる。即ち、輪重測定時には、昇降用油圧シリンダ8の油圧を徐々に変化させてその際の圧力を圧力計143で検出すると共に、各油圧圧力でのひずみゲージw,x,y,zの出力を記録し、圧力計143により検出圧力と後方ガイド輪6の軸重との対応関係を示すテーブルを事前に作成し、制御装置90はこれを記憶する。
これにより、制御装置90は、走行時(ひずみゲージw,x,y,zを装着しない通常の走行用の後方ガイド輪6を装着した状態)には、圧力143の検出圧力が入力されると、テーブルを参照することにより、後方ガイド輪6の軸重を算出することが可能となっている。
【0034】
前方ガイド輪5及び後方ガイド輪6は、踏面勾配やフランジ部5f,6fを備えており、軌道案内機能を果たす。このため、駆動輪である後方ゴムタイヤ4に踏面勾配やフランジが設けられていなくても、デュアルモード車両1は、レールRに沿って正確に軌道走行を行うことができる。
また、前方ガイド輪5及び後方ガイド輪6のフランジ角度θ(約87°)は、通常の鉄道車両で用いられる車輪よりもフランジ角度が大きく設定されている(図6(B)参照)。これは、公知の先行技術から、デュアルモード車両1の脱線限界値を考慮して算出されたものであり、後方ガイド輪6の軸重が後部荷重全体の40%まで減少した時でも脱線係数が規定値を超えないよう考慮されている。
【0035】
[車速センサ及びタイヤ回転速度センサ]
車速センサ11は、デュアルモード車両1の軌道走行時における走行速度を検出する。本実施の形態においては、後方ガイド輪6に搭載されたガイド輪回転速度センサ(車速センサ11)を採用しており、車速センサ11で検出された前後のガイド輪の回転速度に基づいて、軌道走行時におけるデュアルモード車両1の走行速度を算出している。車速センサ11で検出された速度情報は制御装置90に伝送されて、後方ゴムタイヤ4の空転状態の検出に用いられる。なお、車速センサ11としては、GPS(Global Positioning System)やINS(Inertial Navigation System)等を採用することもできる。
なお、この車速センサ11は、後方ガイド輪6に限らず、前方ガイド輪5にも設けても良い。
【0036】
タイヤ回転速度センサ12は、軌道走行時における後方ゴムタイヤ4の回転速度を検出する。本実施の形態においては、プロペラシャフトに取付けられたタイヤ回転速度センサ12から後方ゴムタイヤ4の回転速度を算出するようにしている。このようにタイヤ回転速度センサ12を用いて算出された速度情報は、制御装置90に伝送されて、後方ゴムタイヤ4の空転状態の検出に用いられる。
【0037】
[サスペンション装置]
前述した後方ゴムタイヤ用車軸4aはサスペンション装置を介してシャーシ部2aに支持されている。
このサスペンション装置は、シャーシ部2aの下側において前後方向に沿って装備された二つの板バネと、二つの板バネの中間において後方ゴムタイヤ用車軸4aの両端部をそれぞれ回転可能に支持する支持部とを備えている。
各板バネは、車体前後方向に沿った状態でシャーシ部2aの下面に支持されると共に、弓なりに湾曲形成されており、支持部及びこれに支持された車軸4aを上下方向に揺動させることを可能としている。そして、支持部及び車軸4aの揺動の際には、板バネは、撓みを生じて弾性力を支持部及び車軸4aに付与することで緩衝効果を得ることが可能となっている。
また、このサスペンション装置には、シャーシ部2aから後方ゴムタイヤ用車軸4aまでの距離(サスペンションの伸縮量)を検出するポテンショメータ13が装備され(図2参照)、かかるポテンショメータ13の検出信号は、制御装置90に入力される。シャーシ部2aから後方ゴムタイヤ用車軸4aまでの距離は、後方ゴムタイヤ4のの軸重(レールに対する接地荷重)との間で相関関係がある。このため、制御装置90はシャーシ部2aから後方ゴムタイヤ用車軸4aまでの距離と後方ゴムタイヤ4の軸重との対応関係を事前の計測で求め、これらの対応関係を示すテーブルデータを予め用意し、ポテンショメータ13の検出信号が入力されると、テーブルデータから後方ゴムタイヤ4の軸重を算出するようになっている。なお、これにより、ポテンショメータ13は後方ゴムタイヤ4の軸重検出手段として機能するものである。
【0038】
[油圧回路]
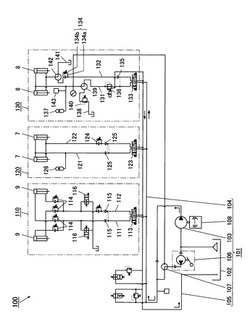
デュアルモード車両1の油圧回路100を図7に示す。図示のように、この油圧回路100は、主に、前方ゴムタイヤ3,3の昇降用油圧シリンダ9,9の油圧系統110と、前方ガイド輪5,5の昇降用油圧シリンダ7,7の油圧系統120と、後方ガイド輪6,6の昇降用油圧シリンダ8,8の油圧系統130と、各油圧系統110,120,130に対する作動油の供給及び回収を行う供給系統101とから構成されている。
【0039】
上記の供給系統101は、作動油を貯留する作動油タンク102と、モータ108により駆動して作動油タンク102から作動油を送出する油圧ポンプ103と、油圧ポンプ103から送出された作動油の供給経路104と、各油圧系統110,120,130から戻された作動油が通る戻り経路105とを備えている。また、符号106は非常時の主動ポンプであり、手動の切り替えバルブ107を操作することで、油圧ポンプ103に替えて使用することができる。
【0040】
油圧系統110は、前方ゴムタイヤ3,3を昇降させる一対の複動式の昇降用油圧シリンダ9,9がタイヤ下降時に作動油が供給されるボア側貯留部とタイヤ上昇時に作動油が供給されるロッド側貯留部とを備え、ボア側貯留部に対して作動油を流通させるボア側経路111と、各昇降用油圧シリンダ9,9のロッド側貯留部に対して作動油を流通させるロッド側経路112と、ボア側経路111とロッド側経路112とに対して供給系統101の供給経路104と戻り経路105とを選択的に接続可能な方向切替弁113と、ボア側経路111とロッド側経路112のそれぞれにおいて作動油の戻り側の流量を規制する速度制御弁114,114,114,114と、ボア側経路111とロッド側経路112とのそれぞれに設けられたパイロットチェックバルブ115,115と、制御信号に応じて昇降用油圧シリンダ9,9のロッド側貯留部の作動油を作動油タンク102に戻す経路に接続することが可能な2ポート2位置切替弁116,116とを主に備えている。
【0041】
方向切替弁113は3位置4ポート弁であり、制御装置90の制御に従って、ロッド側経路112を供給経路104に且つボア側経路111を戻り経路105に接続した状態と、ボア側経路111を供給経路104に且つロッド側経路112を戻り経路105に接続した状態と、ロッド側経路112とボア側経路111の両方を戻り経路105に接続した状態とに切り替えることが可能となっている。
これにより、制御装置90は、任意に前方ゴムタイヤ3,3の昇降を制御することが可能となっている。
【0042】
油圧系統120は、前方ガイド輪5,5を昇降させる一対の複動式の昇降用油圧シリンダ7,7がタイヤ下降時に作動油が供給されるロッド側貯留部とタイヤ上昇時に作動油が供給されるボア側貯留部とを備え、ボア側貯留部に対して作動油を流通させるボア側経路121と、各昇降用油圧シリンダ7,7のロッド側貯留部に対して作動油を流通させるロッド側経路122と、ボア側経路121とロッド側経路122とに対して供給系統101の供給経路104と戻り経路105とを選択的に接続可能な方向切替弁123と、ロッド側経路122において作動油の戻り側の流量を規制する速度制御弁124と、ボア側経路121とロッド側経路122とのそれぞれに設けられたパイロットチェックバルブ125,125と、昇降用油圧シリンダ7,7を通じて前方ガイド輪5,5の振動衝撃を緩和するためのアキュムレータ126とを主に備えている。
【0043】
方向切替弁123は3位置4ポート弁であり、制御装置90の制御に従って、ロッド側経路122を供給経路104に且つボア側経路121を戻り経路105に接続した状態と、ボア側経路121を供給経路104に且つロッド側経路122を戻り経路105に接続した状態と、ロッド側経路122とボア側経路121の両方を戻り経路105に接続した状態とに切り替えることが可能となっている。
これにより、制御装置90は、任意に前方ガイド輪5,5の昇降を制御することが可能となっている。
【0044】
アキュムレータ126は、一般に中空な容器の内部に圧縮ガス(窒素ガス)が封止されており、当該アキュムレータ126が接続された油圧経路内に圧縮ガスの圧力よりも高圧で作動油が供給されると、アキュムレータ126の内部にも作動油が蓄積され、油圧経路の圧力が圧縮ガスの圧力よりも低くなった場合に、蓄積した作動油を放出する蓄圧器である。
アキュムレータ126は、圧縮ガスの内部圧力は、軌道走行モードにおいて前方ガイド輪5,5が前方ゴムタイヤ3を上方に押し上げる際の作動油の供給圧力よりも幾分高く設定されている(例えば、10[MPa])。このため、アキュムレータ126内には、通常は作動油は蓄積されず、例えば、前方ガイド輪5が外部から振動や衝撃を受けて前方ガイド輪5,5が上方に押し上げられた場合に、昇降用油圧シリンダ7のボア側貯留部に供給される作動油がアキュムレータ126内に一時的に貯留されることで、車体2への振動や衝撃の伝達を抑制することが可能となっている。
【0045】
油圧系統130は、後方ガイド輪6,6を昇降させる一対の複動式の昇降用油圧シリンダ8,8がタイヤ下降時に作動油が供給されるロッド側貯留部とタイヤ上昇時に作動油が供給されるボア側貯留部とを備え、ボア側貯留部に対して作動油を流通させるボア側経路131と、各昇降用油圧シリンダ7,7のロッド側貯留部に対して作動油を流通させるロッド側経路132と、ボア側経路131とロッド側経路132とに対して供給系統101の供給経路104と戻り経路105とを選択的に接続可能な方向切替弁133と、ロッド側経路132において作動油の戻り側の流量を規制する流量調整弁134と、ロッド側経路132に設けられたパイロットチェックバルブ135と、ボア側経路131に設けられて各昇降用油圧シリンダ8,8への作動油の供給圧力を制御装置90の制御に基づいて調節する圧力制御弁136と、ボア側経路131における各昇降用油圧シリンダ8のボア側貯留部のすぐ手前に設けられた油圧シリンダの圧力低下防止用のアキュムレータ137と、圧力制御弁136とアキュムレータ137との間においてボア側経路131から分岐した作動油タンク102側への戻り経路138と、制御装置90の制御により各昇降用油圧シリンダ8,8のボア側貯留部を戻り経路138に接続可能な切替弁139と、戻り経路138の途中に設けられ、昇降用油圧シリンダ8のボア側貯留部が所定の圧力を超えると戻り経路138の流通を可能とするリリーフ弁140と、昇降用油圧シリンダ8,8のロッド側と流量調整弁134との間でロッド側経路132から分岐した作動油タンク102側への戻り経路141と、制御装置90の制御により各昇降用油圧シリンダ8,8のロッド側貯留部を戻り経路141へ接続可能な切替弁142と、各昇降用油圧シリンダ8のボア側貯留部への作動油の供給圧力を検出して制御装置90に出力する圧力計143とを主に備えている。
【0046】
方向切替弁133は3位置4ポート弁であり、制御装置90の制御に従って、ロッド側経路132を供給経路104に且つボア側経路131を戻り経路105に接続した状態と、ボア側経路131を供給経路104に且つロッド側経路132を戻り経路105に接続した状態と、ロッド側経路132とボア側経路131の両方を戻り経路105に接続した状態とに切り替えることが可能となっている。
これにより、制御装置90は、任意に後方ガイド輪6,6の昇降を制御することが可能となっている。
【0047】
また、前述した、後方ゴムタイヤ4と後方ガイド輪6の輪重の配分を制御する輪重制御は、制御装置90が圧力制御弁136を制御することで実現する。
この圧力制御弁136は、油圧ポンプ103が一定の出力で作動している状態において、制御指令の電流値に比例して昇降用油圧シリンダ8,8に付与する作動油の圧力を任意に変動させることが可能となっている。また、昇降用油圧シリンダ8,8に付与する作動油の圧力を任意に変動させることで、後方ガイド輪6,6の輪重を任意に制御することが可能となる。
そして、制御装置90は、圧力制御弁136の指令電流値と各指令電流値における後方ガイド輪6,6の輪重との対応関係を示すデータテーブルをそのメモリ内に保有しており、後方ガイド輪6,6を任意の輪重に制御することを可能としている。
また、制御装置90は、圧力制御弁136の指令電流値を任意に増減することにより、後方ガイド輪6,6の輪重を自在に増減させることができ、これにより、後方ゴムタイヤ4と後方ガイド輪6の輪重の配分を任意に制御することが可能となっている。
【0048】
後方ガイド輪6の油圧系統130におけるアキュムレータ137は、前方ガイド輪5の油圧系統120のアキュムレータ126と異なり、内部の圧縮ガス(窒素ガス)の封止圧力は、軌道走行モードにおいて輪重制御に基づいて昇降用油圧シリンダ8,8に供給される作動油の圧力よりも幾分低く設定されている(例えば、2.6[MPa])。このため、軌道走行モードにおいて、アキュムレータ137内には常に作動油が蓄積された状態にある。
そして、例えば、後方ゴムタイヤ4はレール上で何か(例えば降雪等)に乗り上げて車体2が急に押し上げられた場合に、油圧ポンプ103による作動油の供給が間に合わずに、後方ガイド輪6,6の車体2と共に押し上げられそうになった場合でも、このアキュムレータ137が素早く作動油を放出し、昇降用油圧シリンダ8,8のボア側貯留部に作動油を供給するので、後方ガイド輪6,6がレールから浮くことを防止することが可能である。
また、このアキュムレータ137は、作動油を十分に昇降用油圧シリンダ8,8に供給することができるように、前述した緩衝用のアキュムレータ126に比べて倍の容器(例えば、2[L])で作動油を貯留可能となっている。
【0049】
また、これに関連して、各昇降用油圧シリンダ8,8のロッド側貯留部に接続された切替弁142は、軌道走行モードにおいて、各昇降用油圧シリンダ8,8のロッド側貯留部が戻り経路141に接続されるよう制御装置90によって制御される。流量調整弁134は、逆止弁134aと絞り弁134bとが並列に設けられて構成されており、切替弁142により、流量調整弁134が有する絞り弁134bを介在することなく、昇降用油圧シリンダ8,8のロッド側貯留部の作動油を速やかに作動油タンク102に戻すことが可能となっている。このため、車体2が急に押し上げられて昇降用油圧シリンダ8,8のボア側貯留部にアキュムレータ137から作動油が供給される場合に、ロッド側貯留部の作動油が後方ガイド輪6,6の下降動作の妨げとならず、また、アキュムレータ137の内部圧力が低めに設定されている場合でも、速やかに昇降用油圧シリンダ8,8を下降動作方向に作動させることが可能となっている。
【0050】
[制御装置]
制御装置90は、デュアルモード車両1の機器全体を統合制御するCPUやRAM、各種制御プログラムや制御データを格納したROM等から構成されている。
上記制御装置90には、図2に示すように、圧力計143、車速センサ11、タイヤ回転速度センサ12、ブレーキセンサ79、昇降用油圧シリンダ7、8、9の方向切替弁113、123、133、油圧系統130の圧力制御弁136、切替弁139、142、油圧ポンプ103を駆動するモータ108等が図示しないインターフェイス又はドライバ回路を介して接続されている。
そして、制御装置90は、上記の制御系により、デュアルモード車両1の道路走行モードと軌道走行モードとを切り替える走行モード切り替え制御と、輪重制御とを実行する。
【0051】
[走行モード切り替え制御]
制御装置90は、道路走行モードから軌道走行モードへ切り替えを行う際には、方向切替弁113,123,133を通じて各昇降用油圧シリンダ9,7,8を作動させ、上方に退避していた前方ガイド輪5、後方ガイド輪6を下降させると共に、前方ゴムタイヤ3は離陸するまで上昇させる制御を行う。また、昇降用油圧シリンダ8については後方ゴムタイヤ4が離陸を生じない範囲で後方ガイド輪6がレールに接地する位置まで下降するよう制御を行う。これにより、デュアルモード車両1は、前方ガイド輪5及び後方ガイド輪6がレールに接地して軌道のレールにガイドされると共に、後方ゴムタイヤ4がレールに接地してエンジンからトルクを付与されて軌道走行を行うことが可能となる。
また、制御装置90は、軌道走行モードから道路走行モードへ切り替えを行う際には、方向切替弁113,123,133を通じて各昇降用油圧シリンダ9,7,8を作動させ前方ガイド輪5、後方ガイド輪6を上方に退避させると共に前方ゴムタイヤ3を下降させる。これにより、前方ゴムタイヤ3が下降して路面に接地し、後方ゴムタイヤ4がエンジンからトルクが付与されて道路走行を行うことが可能となる。
【0052】
[輪重制御]
輪重制御は、デュアルモード車両1が軌道走行モードで走行を行うことを前提とし、(1)制動時、(2)非制動時であって所定の低速走行時(0を超えて10[km/h]未満)、(3)非制動時であって所定速度範囲での通常走行時(10[km/h]以上)の個々の状況に応じて制御装置90が異なる制御を実行する。即ち、制御装置90は、輪重制御手段として機能する。
なお、軌道走行モードでの走行時には、常に油圧回路100の油圧ポンプ103が駆動継続状態にあり、昇降用油圧シリンダ8,8には常に一定の作動油の圧力が付与された状態にあることを前提とする。
【0053】
まず、非制動状態での通常走行時には、制御装置90は、後方ゴムタイヤ4,4の空転を検出して、当該空転検出時には、後方ガイド輪6,6の下降方向の出力を低減させるように(ボア側貯留部の圧力が低下するように)圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御し、空転非検出時には、後方ガイド輪6,6の下降方向の出力を上昇させるように(ボア側貯留部の圧力が増加するように)圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御する。
また、このとき、デュアルモード車両1の走行時の後部荷重に対して、第一の配分比率(40パーセント)を乗じた値を後方ガイド輪6,6の輪重の下限値として定め、空転の有無に拘わらず後方ガイド輪6,6の輪重が下限値を下回らないよう規制する。
【0054】
後方ゴムタイヤ4,4の空転検出は、制御装置90が、車速センサ11で検出された車両1の軌道走行速度(以下、「検出速度」という)と、タイヤ回転速度センサ12で検出された軌道走行時における後方ゴムタイヤ4の回転速度から算出された車両1の軌道走行速度(以下、「算出速度」という)とを比較して、検出速度と算出速度との差が所定の閾値以下である場合には後方ゴムタイヤ4が空転状態にないと判定し、検出速度と算出速度との差が所定の閾値を超える場合には後方ゴムタイヤ4が空転状態にあると判定する。
即ち、この場合、制御装置90は、空転判定手段として機能する。
【0055】
上記制御では、後方ガイド輪6,6の輪重の下限値を算出するために、その時の走行時の車両1の後部荷重をリアルタイムで計測する必要があるが、デュアルモード車両1は、搭乗者人数の変動により後部荷重が大きく変動すること、走行中は振動などの影響を受けて正しく後部荷重を検出できないこと等の事情があるので、実際に走行中に後部荷重を計測することは困難である。
従って、制御装置90は、車速センサ11の出力から車両1の停止が検出されると、ポテンショメータ13と圧力計143の出力を読み取り、それぞれのデータデーブルを参照して、後方ゴムタイヤ4の輪重と後方ガイド輪6の輪重とを算出し、それらを合計して求めた後部荷重を走行時の後部荷重として図示しないメモリに記録する。また、この走行時の後部荷重は、車両1が停止する毎に求められ、新たに上書きにより更新される。これにより、デュアルモード車両1は停止するたびに停止時の後部荷重が計測され更新される。一方、走行中に車両の後部荷重が変動する可能性は少ないので、車両1が停止する毎に新しい後部荷重を計測することで、走行中のリアルタイムの後部荷重とほぼ同値の後部荷重を取得することが可能となっている。
そして、走行時には、最新の後部荷重に基づいて後方ガイド輪6,6の輪重の下限値を算出し、輪重制御において常にこれを下回らないように昇降用油圧シリンダ8,8の出力に対して規制を行う。
【0056】
また、非制動状態での低速走行時には、制御装置90は、後方ゴムタイヤ4,4の空転検出は行わず、デュアルモード車両1の空車積載時の後部荷重に対して、第一の配分比率よりも大きい第二の配分比率(例えば46パーセント)を乗じた目標値を維持するように、圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御する。
なお、デュアルモード車両1の空車積載時の後部荷重は、車両設定時点で求められる変動の生じない固定値であり、予め制御装置90のメモリ内に登録されているのでこれを参照する。
デュアルモード車両1が、非制動状態で低速走行を行っている状態は、主として、走行開始時の加速状態である場合が多く、そのような場合には、後方ゴムタイヤ4,4が確実にレール上にホールドして走行駆動力が得られるように、後方ガイド輪6,6の後部荷重の分配比率を通常走行時よりも低く、後方ゴムタイヤ4,4の後部荷重の分配比率を通常走行時よりも高く設定している。
【0057】
また、制動時には、制御装置90は、後方ゴムタイヤ4,4の空転検出は行わず、デュアルモード車両1の走行時点での後部荷重に対して、第一の配分比率(40パーセント)を乗じた目標値を維持するように、圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御する。
また、このとき、デュアルモード車両1の空車積載時の後部荷重に対して、第二の配分比率(46パーセント)を乗じた値を後方ガイド輪6,6の輪重の下限値として定め、後方ガイド輪6,6の輪重が下限値を下回らないよう規制する。
【0058】
上記制動時の制御の場合も、後方ガイド輪6,6の輪重の目標値を特定するために走行時の車両1の後部荷重を取得する必要があるが、その手法は非制動状態での通常走行時の場合と同様である。
【0059】
デュアルモード車両1の制動時には、車両の後部荷重が低減するので、後方ガイド輪6,6の輪重を低い値に固定することで後方ゴムタイヤ4,4の輪重を余分に確保し、後方ゴムタイヤ4,4による制動力の確保を行っている。
【0060】
[輪重制御における動作説明]
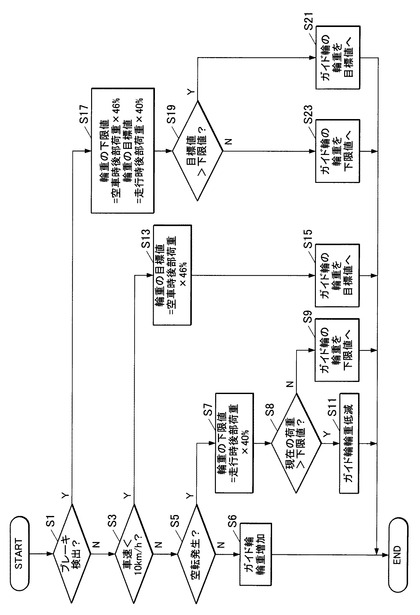
次に、図8のフローチャートに基づいて輪重制御における詳細な動作説明を行う。輪重制御は、デュアルモード車両1が軌道走行モードであって走行中であることを前提とする。
図8に示すように、軌道走行モードでの走行中において、制御装置90は、ブレーキセンサ79によるブレーキ操作の有無を判定し(ステップS1)、ブレーキ操作を検知しない場合には(ステップS1:NO)、車速センサ11からデュアルモード車両1の車速を検出する。
そして、デュアルモード車両1の車速が低速域(10[km/h]未満)か否かを判定する(ステップS3)。
【0061】
そして、デュアルモード車両1の車速が低速域ではない場合には(ステップS3:NO)、車速センサ11から求まる車速に対するタイヤ回転速度センサ12から求まる車速の差を求め、その値が予め定めた閾値を超えるか否かによって後方ゴムタイヤ4,4の空転の発生を判定する(ステップS5)。
その結果、空転が発生していないと判定した場合には、制御装置90は、圧力制御弁136により後方ガイド輪6,6の輪重が増加するように昇降用油圧シリンダ8,8を制御して処理を終了する(ステップS6)。
【0062】
また、空転が発生していると判定した場合には(ステップS5:YES)、制御装置90は、後方ガイド輪6,6の輪重の下限値を、直近で更新された走行時の車両の後部荷重の値に40パーセントを乗じて算出する(ステップS7)。
そして、圧力計143の検出出力から現在の後方ガイド輪6,6の輪重を算出し、輪重の下限値を超えているか否かを判定する(ステップS8)。
そして、後方ガイド輪6,6の輪重が下限値以下の場合には、当該後方ガイド輪6,6の輪重が下限値となるように圧力制御弁136を制御して処理を終了する(ステップS9)。
また、後方ガイド輪6,6の輪重が下限値より大きい場合には、制御装置90は、圧力制御弁136により後方ガイド輪6,6の輪重が低下するように昇降用油圧シリンダ8,8を制御して処理を終了する(ステップS11)。
【0063】
また、ステップS3において、デュアルモード車両1の車速が低速域であると判定した場合には(ステップS3:YES)、制御装置90は、後方ガイド輪6,6の輪重の目標値を、予め登録された空車時の車両の後部荷重の値に46パーセントを乗じて算出する(ステップS13)。
次いで、圧力制御弁136により、後方ガイド輪6,6の輪重が目標値となるように制御して処理を終了する(ステップS15)。
【0064】
また、ステップS1において、ブレーキセンサ79によるブレーキ操作が検出された場合には(ステップS1:YES)、制御装置90は、後方ガイド輪6,6の輪重の下限値を、予め登録された空車時の車両の後部荷重の値に46パーセントを乗じて算出する。また、後方ガイド輪6,6の輪重の目標値を、直近で更新された走行時の車両の後部荷重の値に40パーセントを乗じて算出する(ステップS17)。
そして、後方ガイド輪6,6の輪重の目標値と後方ガイド輪6,6の輪重の下限値とを比較し(ステップS19)、目標値の方が大きければ、圧力制御弁136により、後方ガイド輪6,6の輪重が目標値となるように制御して処理を終了する(ステップS21)。
また、下限値の方が大きければ、圧力制御弁136により、後方ガイド輪6,6の輪重が下限値となるように制御して処理を終了する(ステップS23)。
なお、このステップS1〜S23までの処理は、所定周期で繰り返し実行される。
【0065】
[後方ガイド輪の昇降用油圧シリンダの油圧系統の挙動]
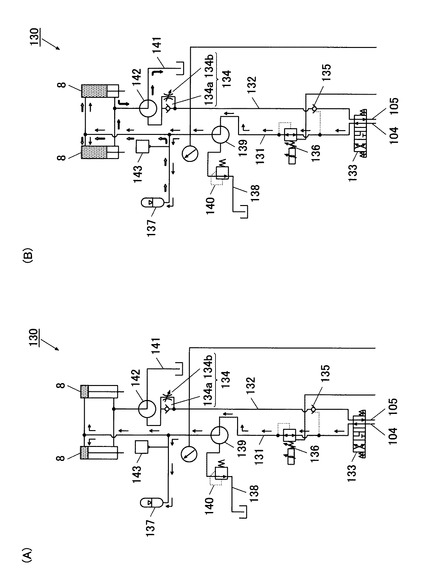
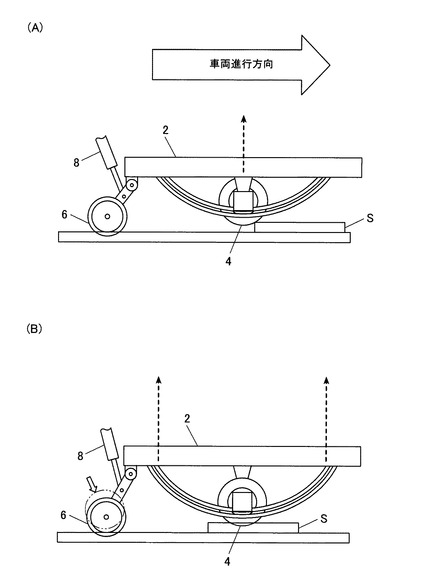
軌道走行モードによる走行時の後方ガイド輪の昇降用油圧シリンダの油圧系統130の挙動について図9及び図10に基づいて説明する。図9(A)は通常の走行状態における油圧の伝達状態を示し,図9(B)は車体2が押し上げられたときの油圧の伝達状態を示す。また、図10(A)は後方ゴムタイヤ4がレール上で積雪などの障害物Sに乗り上げた瞬間の状態を示し、図10(B)は車体2が押し上げられた時の後方ガイド輪6の動作状態を示す。
【0066】
図9(A)に示すように、軌道走行モードでは、制御装置90により、方向切替弁133が、ボア側経路131を供給経路104に接続し且つロッド側経路132を戻り経路105に接続した状態に切り替えられ、切替弁142が昇降用油圧シリンダ8のロッド側貯留部を戻り経路141に接続した状態に切り替えられる。
【0067】
なお、この切替弁142による昇降用油圧シリンダ8のロッド側貯留部の戻り経路141への切り替え動作は、制御装置90の制御により、道路走行モードから軌道走行モードへの切り替える場合に、後方ガイド輪6,6がレールに下降する動作が完了した時点で行われるようになっている。
即ち、後方ガイド輪6,6がレールに下降する動作を行う際には、切替弁142は昇降用油圧シリンダ8のロッド側貯留部を絞り弁134bを有する流量調整弁134が介在するロッド側経路132に接続し、ロッド側貯留部からの作動油の排出時のノッキングを防止している。そして、軌道走行モードでの走行中は、ロッド側貯留部を絞り弁が介在しない戻り経路141に接続することで速やかな作動油の排出を可能としている。
【0068】
その結果、ボア側経路131には所定の圧力で作動油が供給され、また、ボア側経路131に分岐接続されたアキュムレータ137には作動油が蓄積される。
また、軌道走行モードでは、輪重制御が実施されるので、圧力制御弁136を通じて昇降用油圧シリンダ8,8のボア側貯留部に対して所定圧力で作動油が供給される。
【0069】
そして、図10(A)に示すように、後方ゴムタイヤ4がレール上で積雪などの障害物Sに乗り上げると、後方ゴムタイヤ4を支持するサスペンション装置が収縮した後に、図10(B)に示すように、車体2を押し上げる。
このとき、瞬間的に後方ガイド輪6はレールからの抗力がなくなり、その下側が開放された状態となるが、油圧ポンプ103の作動油の供給量は一定であることから,後方ガイド輪6を即座にレールまで下降させるために必要な作動油を供給しきれない状態となる。
一方、昇降用油圧シリンダ8のボア側貯留部は一時的に作動油の圧力に低下を生じるため、アキュムレータ137は、図9(B)に示すように、それまで蓄積していた作動油を即座に放出する。これにより、昇降用油圧シリンダ8のボア側貯留部に作動油が満たされる。
また、同時に、昇降用油圧シリンダ8のロッド側貯留部は、切替弁142によって戻り経路141に開放されているため、ロッド側貯留部の内部の作動油も速やかに排出することができる。
従って、車体2の浮き上がりの発生時に後方ガイド輪6は速やかに下降してレールから浮き上がることが防止される。
【0070】
[発明の実施の形態の効果]
上記デュアルモード車両1は、軌道走行モードにおいて、輪重制御を行うことで、後方ゴムタイヤ4,4の空転の発生を極力抑えつつ、後方ガイド輪6,6の輪重抜けを防止することが可能である。
そして、油圧回路100において、後方ガイド輪6,6の昇降を行う昇降用油圧シリンダ8,8に油圧シリンダの圧力低下防止用のアキュムレータ137を併設したので、後方ゴムタイヤ4,4がレール上の段差となる何らかの障害物などに乗り上げて車体2の浮き上がりが生じた場合に、後方ガイド輪6,6を速やかに下降させることができ、当該ガイド輪6,6の浮き上がりを防止することが可能となる。
また、アキュムレータ137は、通常走行時の輪重制御において後方ガイド輪6,6が輪重の下限値を得るために昇降用油圧シリンダ8,8に供給する圧力以下の圧力で作動油を貯留可能としている。このため、輪重制御の実行により昇降用油圧シリンダ8,8への作動油の圧力が絶えず変動する場合であっても、油圧回路100内の圧力変動の影響を受けることなく常に作動油を貯留することができ、輪重制御の実施している場合でも常にアキュムレータ137を作動させることができ、常に後方ガイド輪6,6の浮き上がりを防止することができ、走行安定性の向上を図ることが可能となる。
【0071】
また、デュアルモード車両1は、前方ガイド輪5,5の支持機構50と後方ガイド輪6,6の支持機構60とに、それぞれバネ式のサスペンション54、64を併設したので、油圧回路100に設けたアキュムレータ137が作動油を貯留する圧力を低く設定することで前方ガイド輪5,5と後方ガイド輪6,6の高周波振動を抑制する効果が得られない場合であっても、各サスペンション54、64がこれを緩和し、乗り心地や走行安定性の向上を図ることが可能である。
【0072】
[その他]
なお、上記デュアルモード車両1では、後方ガイド輪6,6の輪重や車体の後部荷重を求める際に、油圧回路100の圧力計143の検出出力を利用しているが、これに限るものではない。
例えば、圧力制御弁136に対する制御電流値と後方ガイド輪6,6の輪重との間で一定の関係が成立し、制御電流値を定まると一定の輪重となるような高い再現性を有する場合には、圧力制御弁136に対する制御電流値を読み取ることで後方ガイド輪6,6の輪重を求めることが可能である。従って、圧力制御弁136の制御電流値と後方ガイド輪6,6の輪重との関係を示すデータデーブル等を制御装置90のメモリ内に用意し、圧力制御弁136の制御電流値から後方ガイド輪6,6の輪重を特定することも可能である。その場合、油圧回路100の圧力計143及びそのデータテーブルは不要とすることができる。
【符号の説明】
【0073】
1 デュアルモード車両(走行車両)
2 車体
3 前方ゴムタイヤ(道路走行用タイヤ)
3a,4a ゴムタイヤ用車軸
4 後方ゴムタイヤ(道路走行用タイヤ)
5 前方ガイド輪(軌道走行用車輪)
5a,6a ガイド輪用車軸
6 後方ガイド輪(軌道走行用車輪)
7,8,9 昇降用油圧シリンダ(アクチュエータ)
7a ロッド
11 車速センサ
12 タイヤ回転速度センサ
13 ポテンショメータ
50,60 支持機構
53,63 緩衝装置
54,64 バネ式のサスペンション
90 制御装置(空転判定手段、輪重制御手段)
100 油圧回路
101 供給系統
102 作動油タンク
103 油圧ポンプ
110,120,130 油圧系統
113,123,133 方向切替弁
134 流量調整弁
134b 絞り弁
136 圧力制御弁
137 油圧シリンダの圧力低下防止用のアキュムレータ
139,142 切替弁
141 戻し経路
143 圧力計
【技術分野】
【0001】
本発明は、道路走行と軌道走行とを可能とする走行車両に関するものである。
【背景技術】
【0002】
現在、鉄道と道路とのシームレス化を行って鉄道車両とバスの双方の利点を生かす交通システムを構築する目的で、車体の前後にタイヤ用車軸を介して設けられた道路走行用のゴムタイヤと、車体の前後にガイド輪用車軸を介して設けられた軌道走行用のガイド輪と、を備えた軌道走行と道路走行との双方が可能な車両(以下「デュアルモード車両」という)が提案されている。
【0003】
上記デュアルモード車両は、軌道走行時には油圧シリンダにより、前後の軌道走行用のガイド輪を下降させてレールに乗せ、且つ、エンジンからトルクが付与される後方ゴムタイヤ(駆動輪)のみがレールに当接する高さに調節し、前後のガイド輪によりレールに追従走行すると共に前方ゴムタイヤを浮かせて後方ゴムタイヤのみにより走行駆動力を生じていた。
【0004】
そして、このデュアルモード車両では、後方ゴムタイヤの空転を検出すると共に後方ガイド輪を昇降させる油圧シリンダに付与する油圧を油圧回路により制御して、後方ゴムタイヤがレール上で空転せず且つ後方ガイド輪がレールから逸脱しないように、後方ガイド輪の軸重と後方ゴムタイヤの軸重との間で車両後部の荷重を適宜分配していた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3671186号公報
【特許文献2】特開平07−9826号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記油圧回路による制御(以下、輪重制御という)では、後方ゴムタイヤの空転の発生を検出すると、後方ガイド輪の軸重を低減して後方ゴムタイヤの接地圧を高めて空転を解消し、空転が検出されない場合には後方ガイド輪の軸重を高めてレール走行の追従性を高めるよう制御が行われる。
かかる輪重制御における油圧の増減の応答性は、油圧供給源となる油圧ポンプの性能に依存しており、輪重制御の場合には追従性に問題を生じないようになっている。ところが、例えば、レール上に異物(例えば、降雪による雪の塊等)が存在し、これに後方ゴムタイヤが乗り上げた場合などには、油圧ポンプによる作動油の供給が間に合わず、後方ガイド輪は急な車体の上昇に追従できなくなり、レールから浮いてしまう可能性があった。
【0007】
かかる問題に対して、車体の前後それぞれにゴムタイヤとガイド輪とを備える軌陸車の分野において、ガイド輪の浮きの発生の対策として、ガイド輪を昇降させる油圧シリンダにアキュムレータを併設することが提案されている(例えば、特許文献2参照)。
即ち、この軌陸車では、ガイド輪が所定の接地圧でレールに接地した状態で油圧シリンダに対する油圧供給を遮断し、前後のゴムタイヤと前後のガイド輪とでレール走行を行っているが、上記のように,車体が何らかの要因で押し上げられると、油圧シリンダに対して、アキュムレータから作動油が供給されて速やかにガイド輪を下降させ、浮き上がりの防止を図っている。
【0008】
しかしながら、特許文献2の軌陸車では、レール走行時には油圧シリンダに対する油圧の供給を遮断し、油圧シリンダは一定の出力でガイド輪をレール側に圧接させた状態に維持され、この状態でアキュムレータの排出圧力をもってガイド輪を下降させるものである。
一方、前述したデュアルモード車両の輪重制御では、ガイド輪を昇降させる油圧シリンダの油圧圧力を後方ゴムタイヤの空転の有無に応じて絶えず変動制御することから、油圧回路内の圧力も絶えず変化を生じ、上記軌陸車の技術をそのまま転用することはできなかった。
【0009】
本発明は、デュアルモード車両において、輪重制御を行いつつ、レールに接するガイド輪の浮き上がりの発生を防止することをその目的とする。
【課題を解決するための手段】
【0010】
請求項1記載の発明は、
車体の前側と後側の各々に設けられた一対の軌道走行用車輪と、
車体の前側と後側の各々に設けられた一対の道路走行用タイヤと、
前記前側と後側の一対の軌道走行用車輪をそれぞれ昇降させる前側と後側の昇降用の油圧シリンダと、
前記油圧シリンダに作動油を供給する油圧回路と、
を備え、
前記油圧シリンダにより、前記前側と後側の一対の軌道走行用車輪を上昇させて前記道路走行用タイヤのみで走行を行う道路走行モードと、前記前側と後側の一対の軌道走行用車輪を下降させて当該軌道走行用車輪と前後いずれか一対の道路走行用タイヤとがレールに接地させた状態で走行を行う軌道走行モードとを切り替え可能な走行車両であって、
前記レールに接地させた一対の道路走行用タイヤが空転しているか否かを判定する空転判定手段と、
前記空転判定手段が空転していると判定した場合に、前記レールに接地させた一対の道路走行用タイヤに隣接する前記一対の軌道走行用車輪の輪重を予め定められた下限値を限度として低減し、空転していないと判定した場合に、前記一対の軌道走行用車輪の輪重を高めるように、前記油圧シリンダの出力を制御する輪重制御手段とを備え、
前記油圧回路は、前記一対の軌道走行用車輪の輪重を制御する油圧シリンダに対して車輪下降圧力を付与する油圧経路に設けられ、前記輪重の下限値に相当する圧力以下の圧力で内部に作動油を貯留可能である、前記油圧シリンダの圧力低下防止用のアキュムレータを有することを特徴とする。
【0011】
請求項2記載の発明は、請求項1記載の発明と同様の構成を備えると共に、前記一対の軌道走行用車輪の輪重を制御する油圧シリンダは、車輪下降時に作動油が供給される貯留部と車輪上昇時に作動油が供給される貯留部とを備える複動式であって、
前記油圧回路は、前記油圧シリンダの車輪下降時に作動油が供給される貯留部から作動油を作動油タンクに直接的に戻すために、絞り弁が介在しない戻し経路を備えていることを特徴とする。
【0012】
請求項3記載の発明は、請求項1又は2記載の発明と同様の構成を備えると共に、前記一対の軌道走行用車輪にバネ式のサスペンションを併設したことを特徴とする。
【発明の効果】
【0013】
請求項1記載の発明は、軌道走行モードにおいて、レールに接地する一対の道路走行用タイヤとこれに隣接する一対の軌道走行用車輪との間で、道路走行用タイヤの空転の有無に応じて相互の輪重を調整する輪重制御を行うことで、空転の発生を極力抑えつつ、軌道走行用車輪の輪重抜けを防止することが可能である。
そして、輪重制御を実行するための油圧回路において、一対の軌道走行用車輪の昇降を行う油圧シリンダに当該油圧シリンダの圧力低下防止用のアキュムレータを併設したので、道路走行用タイヤがレール上の段差となる何らかの障害物などに乗り上げて車体の浮き上がりが生じた場合に、アキュムレータが蓄積した作動油を速やかに放出することで油圧シリンダへの供給圧力の低下を速やかに解消し、一対の軌道走行用車輪を速やかに下降させることができるため、当該車輪の浮き上がりを防止することができ、走行安定性の向上を図ることが可能となる。
また、油圧回路は輪重制御を行うことで、油圧シリンダへの供給圧力が常に制御に応じて変動するが、アキュムレータは輪重制御における輪重の下限値に相当する圧力(輪重の下限値を得るために油圧シリンダに供給する圧力)以下で作動油を貯留可能とすることから、油圧回路内の圧力変動の影響を受けることなく常に作動油を貯留することができ、輪重制御の実施している場合でも常にアキュムレータを作動させることができ、常に軌道走行用車輪の浮き上がりを防止することが可能である。
【0014】
請求項2記載の発明は、軌道走行用車輪の輪重を制御する油圧シリンダの車輪上昇時に作動油が供給される貯留部から作動油を作動油タンクに直接的に戻すために、絞り弁が介在しない戻し経路を備えるので、アキュムレータから油圧シリンダの車輪下降時に作動油が供給される貯留部に作動油の圧力が付与された場合に、車輪上昇時に作動油が供給される貯留部側から作動油を速やかに排出することが可能となり、車体の浮き上がりの発生時により速やかに軌道走行輪を下降させることが可能となる。
【0015】
請求項3記載の発明は、一対の軌道走行用車輪にバネ式のサスペンションを併設したので、油圧回路に設けたアキュムレータが輪重の下限値に相当する圧力以下で作動油を貯留可能としたことにより、アキュムレータによる振動吸収効果が十分に得られない場合であっても、サスペンションが車体の振動を吸収し、乗り心地や走行性の安定化を向上することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明における実施の形態に係るデュアルモード車両の主要な構成要素を表し、図1(A)はその側面図、図1(B)はその平面図である。
【図2】デュアルモード車両の制御系を示すブロック図である。
【図3】図3(A)は前方ガイド輪の支持機構の側面図、図3(B)は後方ガイド輪の支持機構の側面図である。
【図4】図4(A)は前方ガイド輪の支持機構の通常時の状態を示し、図4(B)は衝撃発生時の状態を示す説明図である。
【図5】図5(A)は後方ガイド輪の支持機構の通常時の状態を示し、図5(B)は衝撃発生時の状態を示す説明図である。
【図6】デュアルモード車両における輪重計測用の後方ガイド輪(車輪)を示し、図6(A)はその側面図、図6(B)はその断面図、図6(C)は後方ガイド輪に設けられたひずみゲージの回路構成図である。
【図7】デュアルモード車両の油圧回路図である。
【図8】デュアルモード車両の輪重制御におけるフローチャートである。
【図9】図9(A)は通常の走行状態における油圧の伝達状態を示し,図9(B)は車体が押し上げられたときの油圧の伝達状態を示す。
【図10】図10(A)は後方ゴムタイヤがレール上で積雪などの障害物に乗り上げた瞬間の状態を示し、図10(B)は車体が押し上げられた時の後方ガイド輪の動作状態を示す。
【発明を実施するための形態】
【0017】
[発明の実施の形態の概要]
本発明における実施形態である走行車両としてのデュアルモード車両1について、図1から図10を参照しながら説明する。
本実施の形態に係るデュアルモード車両1は、図1及び図2に示すように、車体2、車体2の下部における前側及び後側に配設されたゴムタイヤ用車軸3a,4aを中心に回転する一対の道路走行用タイヤとしての前方ゴムタイヤ3及び後方ゴムタイヤ4、車軸方向における内側にフランジ部5f,6fを備え、車体2の前側及び後側にアーム5b,6bを介して昇降自在に配設されたガイド輪用車軸5a,6aを中心に回転する一対の軌道走行用車輪としての前方ガイド輪5及び後方ガイド輪6、前方ガイド輪5及び後方ガイド輪6を上昇下降させるための昇降用のアクチュエータとしての昇降用油圧シリンダ7,8、前方ゴムタイヤ3を上昇下降させるための昇降用のアクチュエータとしての昇降用油圧シリンダ9、昇降用油圧シリンダ7,8等に油圧を供給する油圧回路100、後側のガイド輪用車軸6aに設けられデュアルモード車両1の走行速度を検出する車速センサ11、後方ゴムタイヤ4の回転速度を検出するタイヤ回転速度センサ12、後方ゴムタイヤ4にかかる重量を測定するためのポテンショメータ13、後方ゴムタイヤ4の駆動源としてのエンジン14、トルク伝達機構としてのトランスミッション15、差動装置(図示略)、サスペンション装置ブレーキ装置(図示略)、上記各構成を制御する制御装置90等を備えて構成されている。
【0018】
また、デュアルモード車両1には、運転席の各操縦装置や操作入力を行うスイッチ類等をはじめとする運転及び制御に必要な装置は当然備えられており、必要に応じて、ATSや防護無線等の安全確保に必要な装置、車内放送や戸締め装置等の接客サービスに必要な装置、無線装置やGPS等の運行管理に用いる装置、自車両と他車両を連結する連結器、連結する際にトランスミッション15と差動装置の間で駆動力を断接する断接装置も備えている。
【0019】
なお、デュアルモード車両1は、車体2にマイクロバスの車体を採用しており、運転士を含めて29人程度を搭乗させることができる。また、エンジン、及び差動装置については、道路走行を行う一般的な自動車が備える一般的なものが使用されている。そのため、従来の鉄道車両の全体重量が約40トンであるのに対し、本実施の形態に係るデュアルモード車両1の全体重量は6トン程度と軽量である。
【0020】
上記の概略構成において、デュアルモード車両1は、道路走行時には、昇降用油圧シリンダ7,8により前方ガイド輪5及び後方ガイド輪6が路面に接触しない高さまで上昇させて退避し、前方ゴムタイヤ3及び後方ゴムタイヤ4のみにより走行を行う(以下、道路走行モードという)。この場合、後方ゴムタイヤ4が駆動輪となってデュアルモード車両1の走行駆動を行い、前方ゴムタイヤ3が操舵輪となって車両の進行方向を操舵する。
また、軌道走行時には、昇降用油圧シリンダ7,8により前方ガイド輪5及び後方ガイド輪6がレール上に接すると共に、前方ゴムタイヤ3がレールの踏面よりも上方に退避するように前方ガイド輪5及び後方ガイド輪6を押し下げる。また、この時、前方ゴムタイヤ3がレールに接しないように昇降用油圧シリンダ9により上方に引き上げる。そして、後方ゴムタイヤ4と前方ガイド輪5及び後方ガイド輪6とにより走行を行う(以下、軌道走行モードという)。
この場合、前方ガイド輪5及び後方ガイド輪6に形成されたフランジ部5f,6fがレールに沿った走行状態を維持し、後方ゴムタイヤ4が駆動輪となってデュアルモード車両1の走行駆動を行う。
また、このデュアルモード車両1では、上記の通り、軌道走行モードにおいて、車両の後部では、後方ゴムタイヤ4と後方ガイド輪6の両方がレールに接地して走行を行うことを前提とするので、後方ゴムタイヤ4による走行駆動力が得られ且つ後方ガイド輪6によるレールに沿った走行を維持できる接地圧(輪重)が得られるように、これらの輪重の配分を調節する必要があり、このため、軌道走行モードでは、制御装置90が昇降用油圧シリンダ8の油圧を制御する輪重制御を行っている。
このような前提を踏まえた上で、デュアルモード車両1の各構成について、以下にその詳細を説明する。
【0021】
[前方及び後方のゴムタイヤ]
前方ゴムタイヤ3は、車体2の運転席のハンドルにより操舵することができる。後方ゴムタイヤ4は、後方ゴムタイヤ用車軸4aに左右2本ずつ軸支され、エンジン14及びトランスミッション15等によって駆動される。即ち、かかる後方ゴムタイヤ4が「トルク伝達が行われる一対の道路走行用タイヤ」に相当する。
【0022】
[前方ガイド輪及び後方ガイド輪]
前方ガイド輪5及び後方ガイド輪6は鉄等の金属で構成され、それぞれ図3(A)と図3(B)とに例示するように、昇降用油圧シリンダ7,8の伸縮によりこれらのガイド輪5,6をそれぞれ上方及び下方に移動させるための支持機構50,60に支持されている。
左右一対の前方ガイド輪5,5は、ガイド輪用車軸5aの両端部に保持されており、当該ガイド輪用車軸5aは支持機構50を介して車体2のシャーシ部2aの前側下部に支持されている。
この支持機構50は、シャーシ部2aの前側端部の左右両側の下面において回動可能に装備された一対の腕部51と、各腕部51の回動端部に一端部が連結されたリンク体52と、リンク体52の他端部と腕部51の中間部とを連結するバネ式のサスペンション54とを備えている。
【0023】
一対の腕部51,51は、車軸5aを平行な横棒により連結されて,シャーシ部2aに対して一体的に回動を行うようになっており、各腕部51,51の回動端部近傍は、それぞれ左右の昇降用油圧シリンダ7,7のロッド7aが連結されている。これにより、腕部51の回動端部側でリンク体52を介して保持される前方ガイド輪5の昇降を可能としている。
【0024】
一対のリンク体52,52はいずれもその中央部に円形の緩衝装置53を擁している。この緩衝装置53は、リンク体52に固定保持される金属製の外輪53aと、図示しない軸受けを介してガイド輪用車軸5aの一端部を回転可能に支持する内輪53bと、外輪53aと内輪53bとの間に介挿されたゴム等の伸縮可能な弾性素材からなる緩衝体53cとを備えており、この緩衝体53cの弾性によりガイド輪用車軸5aからリンク体52への振動、衝撃等の伝達を緩和してしている。また、この緩衝体53cは、その円周に沿って内輪53bの周囲に複数の貫通穴が形成されており、各貫通穴の分布によってガイド輪用車軸5aを中心とする各方向への緩衝性の強弱が調整されている。
【0025】
サスペンション54は、リンク体52の他端部に回動可能に連結されたシリンダ54aと、当該シリンダ54aに挿入されて往復動作が可能なロッド54bと、シリンダ54aとロッド54bの間に介挿されて両端部がそれぞれに連結されたコイルバネ54cとを備えている。このコイルバネ54cは、ロッド54bの往復の双方向の動作に対して弾性的な抵抗力を付与するようになっている。
そして、ロッド54bの突出端部は、腕部51の中間部近傍に対して回動可能に連結されている。
かかる構成からなる支持機構50は、サスペンション54のロッド54bをシリンダ54aに対する滑り対偶、腕部51とリンク体52とサスペンション54のシリンダ54aとを回り対偶と見なすことにより、四節リンク構造(スライダクランク構造)を採っている。
【0026】
そして、図4(A)に示すように、ガイド輪用車軸5aは、リンク体52において、腕部51側の連結端部とサスペンション54側の連結端部とを結ぶ直線に対して前方にずれた位置で保持されている。
このため、図4(B)に示すように、前方ガイド輪5がレールから衝撃等を受けると、リンク体52の上端部(他端部)が腕部51側に揺動し、サスペンション54が収縮する。このため、衝撃のエネルギーはサスペンション54のコイルバネ54cの圧縮により消費され、シャーシ部2a側への伝達が緩和されるようになっている。
【0027】
また、図5(A)に示すように、左右一対の後方ガイド輪6,6は、ガイド輪用車軸6aの両端部に保持されており、当該ガイド輪用車軸6aは支持機構60を介して車体2のシャーシ部2aの後側下部に支持されている。
この支持機構60は、前述した支持機構50と基本構造が同じなので、専ら異なる点についてのみ説明し、同一部分については説明を簡略化する。
即ち、支持機構60は、シャーシ部2aの後側端部の左右両側の下面において回動可能に装備された一対の腕部61と、各腕部61の回動端部に一端部が連結されたリンク体62と、リンク体62の他端部と腕部61の中間部とを連結するバネ式のサスペンション64とを備えている。
【0028】
一対の腕部61,61は、一対の腕部51,51と形状は異なるがは、互いに横棒で一体的に連結され、左右の昇降用油圧シリンダ8,8により回動して後方ガイド輪6,6の昇降を行う点は同じである。
また、一対のリンク体62,62は前述した緩衝装置53と同一構造の緩衝装置63を介してガイド輪用車軸6aを保持している。
【0029】
上記リンク体62は、その上側の端部が腕部61の先端部に連結されており、下側の端部がサスペンション64のシリンダ64aと連結されている。また、サスペンション64のロッド64bは、腕部61の中間近傍に回動可能に連結されており、コイルバネ64cは、ロッド64bの往復の双方向の動作に対して弾性的な抵抗力を付与するようになっている。
そして、かかる構成からなる支持機構60も、サスペンション64のロッド64bをシリンダ64aに対する滑り対偶、腕部61とリンク体62とサスペンション64のシリンダ64aとを回り対偶と見なすことにより、四節リンク構造(スライダクランク構造)を採っている。
【0030】
そして、図5(A)に示すように、ガイド輪用車軸6aも、リンク体62において、腕部61側の連結端部とサスペンション64側の連結端部とを結ぶ直線に対して後方にずれた位置で保持されている。
このため、図5(B)に示すように、後方ガイド輪6がレールから衝撃等を受けると、リンク体62の下端部(他端部)が腕部61の逆側に揺動し、サスペンション64が伸長する。このため、衝撃のエネルギーはサスペンション64の伸長により消費され、シャーシ部2a側への伝達が緩和されるようになっている。
【0031】
[後方ガイド輪の輪重検出]
デュアルモード車両1の制御装置90は、前述したように、一対の後方ゴムタイヤ4と一対の後方ガイド輪6との間で相互の輪重の配分を適正範囲に制御する輪重制御を行う。
一対の後方ゴムタイヤ4と一対の後方ガイド輪6の間の輪重の配分は、後方ガイド輪の昇降を行う昇降用油圧シリンダ8の出力により変動する。このため、図2に示すように、デュアルモード車両1は、後方ガイド輪6の輪重を検出するために、昇降用油圧シリンダ8の油圧の圧力を検出する圧力計143を備えている。
即ち、このデュアルモード車両1は、軌道走行時には、後方ガイド輪6がレールに対して接地圧を生じるように、昇降用油圧シリンダ8に対して後方ガイド輪6を下降させる方向に油圧を付与する。そして、後方ガイド輪6がレールに接地している状態において、後方ガイド輪6の輪重と昇降用油圧シリンダ8への油圧の圧力との間には一定の対応関係が成立している。従って、この対応関係を示すデータテーブルを制御装置90の有する記憶メモリ内に用意しておくことで、上記圧力計143の検出する昇降用油圧シリンダ8への油圧の圧力値からデータテーブルを参照して、後方ガイド輪6の輪重を求めることが可能となる。つまり、圧力計143は、後方ガイド輪6の軸重を検出する軸重検出手段として機能する。
【0032】
上記のデータテーブルは、実際の運行時以外の時に試験的な計測を行うことで取得される。
例えば、図6に示すように、後方ガイド輪用車軸6aの周囲にその円周に沿って複数の孔6hが設けられた輪重の測定用の車輪を通常の後方ガイド輪6に替えて車軸6aに取り付けて、昇降用油圧シリンダ8の油圧の圧力を微小間隔で変化させつつ、輪重の計測を行う。
この輪重測定用の後方ガイド輪6は、対角配置された二つの孔6hにひずみゲージw,x,y,zが貼付けられ、例えば図6(C)のように配線されて後方ガイド輪6が受けている輪重を測定することが可能となる。出力される信号は、後方ガイド輪6の回転に伴って変動する正弦波状の波形となり、その極大値が輪重の値を表していると言える。なお、図6(A)に示したひずみゲージが設けられていない孔6hを用いて図6(C)と同様に配線し輪重測定の回路を構成しても良い。その場合、それぞれ位相の異なる波形を記録することができ、瞬間的な輪重の変動をより正確に補足することができる。
【0033】
なお、昇降用油圧シリンダ8の油圧の圧力の調節は、圧力計143の検出により行われる。即ち、輪重測定時には、昇降用油圧シリンダ8の油圧を徐々に変化させてその際の圧力を圧力計143で検出すると共に、各油圧圧力でのひずみゲージw,x,y,zの出力を記録し、圧力計143により検出圧力と後方ガイド輪6の軸重との対応関係を示すテーブルを事前に作成し、制御装置90はこれを記憶する。
これにより、制御装置90は、走行時(ひずみゲージw,x,y,zを装着しない通常の走行用の後方ガイド輪6を装着した状態)には、圧力143の検出圧力が入力されると、テーブルを参照することにより、後方ガイド輪6の軸重を算出することが可能となっている。
【0034】
前方ガイド輪5及び後方ガイド輪6は、踏面勾配やフランジ部5f,6fを備えており、軌道案内機能を果たす。このため、駆動輪である後方ゴムタイヤ4に踏面勾配やフランジが設けられていなくても、デュアルモード車両1は、レールRに沿って正確に軌道走行を行うことができる。
また、前方ガイド輪5及び後方ガイド輪6のフランジ角度θ(約87°)は、通常の鉄道車両で用いられる車輪よりもフランジ角度が大きく設定されている(図6(B)参照)。これは、公知の先行技術から、デュアルモード車両1の脱線限界値を考慮して算出されたものであり、後方ガイド輪6の軸重が後部荷重全体の40%まで減少した時でも脱線係数が規定値を超えないよう考慮されている。
【0035】
[車速センサ及びタイヤ回転速度センサ]
車速センサ11は、デュアルモード車両1の軌道走行時における走行速度を検出する。本実施の形態においては、後方ガイド輪6に搭載されたガイド輪回転速度センサ(車速センサ11)を採用しており、車速センサ11で検出された前後のガイド輪の回転速度に基づいて、軌道走行時におけるデュアルモード車両1の走行速度を算出している。車速センサ11で検出された速度情報は制御装置90に伝送されて、後方ゴムタイヤ4の空転状態の検出に用いられる。なお、車速センサ11としては、GPS(Global Positioning System)やINS(Inertial Navigation System)等を採用することもできる。
なお、この車速センサ11は、後方ガイド輪6に限らず、前方ガイド輪5にも設けても良い。
【0036】
タイヤ回転速度センサ12は、軌道走行時における後方ゴムタイヤ4の回転速度を検出する。本実施の形態においては、プロペラシャフトに取付けられたタイヤ回転速度センサ12から後方ゴムタイヤ4の回転速度を算出するようにしている。このようにタイヤ回転速度センサ12を用いて算出された速度情報は、制御装置90に伝送されて、後方ゴムタイヤ4の空転状態の検出に用いられる。
【0037】
[サスペンション装置]
前述した後方ゴムタイヤ用車軸4aはサスペンション装置を介してシャーシ部2aに支持されている。
このサスペンション装置は、シャーシ部2aの下側において前後方向に沿って装備された二つの板バネと、二つの板バネの中間において後方ゴムタイヤ用車軸4aの両端部をそれぞれ回転可能に支持する支持部とを備えている。
各板バネは、車体前後方向に沿った状態でシャーシ部2aの下面に支持されると共に、弓なりに湾曲形成されており、支持部及びこれに支持された車軸4aを上下方向に揺動させることを可能としている。そして、支持部及び車軸4aの揺動の際には、板バネは、撓みを生じて弾性力を支持部及び車軸4aに付与することで緩衝効果を得ることが可能となっている。
また、このサスペンション装置には、シャーシ部2aから後方ゴムタイヤ用車軸4aまでの距離(サスペンションの伸縮量)を検出するポテンショメータ13が装備され(図2参照)、かかるポテンショメータ13の検出信号は、制御装置90に入力される。シャーシ部2aから後方ゴムタイヤ用車軸4aまでの距離は、後方ゴムタイヤ4のの軸重(レールに対する接地荷重)との間で相関関係がある。このため、制御装置90はシャーシ部2aから後方ゴムタイヤ用車軸4aまでの距離と後方ゴムタイヤ4の軸重との対応関係を事前の計測で求め、これらの対応関係を示すテーブルデータを予め用意し、ポテンショメータ13の検出信号が入力されると、テーブルデータから後方ゴムタイヤ4の軸重を算出するようになっている。なお、これにより、ポテンショメータ13は後方ゴムタイヤ4の軸重検出手段として機能するものである。
【0038】
[油圧回路]
デュアルモード車両1の油圧回路100を図7に示す。図示のように、この油圧回路100は、主に、前方ゴムタイヤ3,3の昇降用油圧シリンダ9,9の油圧系統110と、前方ガイド輪5,5の昇降用油圧シリンダ7,7の油圧系統120と、後方ガイド輪6,6の昇降用油圧シリンダ8,8の油圧系統130と、各油圧系統110,120,130に対する作動油の供給及び回収を行う供給系統101とから構成されている。
【0039】
上記の供給系統101は、作動油を貯留する作動油タンク102と、モータ108により駆動して作動油タンク102から作動油を送出する油圧ポンプ103と、油圧ポンプ103から送出された作動油の供給経路104と、各油圧系統110,120,130から戻された作動油が通る戻り経路105とを備えている。また、符号106は非常時の主動ポンプであり、手動の切り替えバルブ107を操作することで、油圧ポンプ103に替えて使用することができる。
【0040】
油圧系統110は、前方ゴムタイヤ3,3を昇降させる一対の複動式の昇降用油圧シリンダ9,9がタイヤ下降時に作動油が供給されるボア側貯留部とタイヤ上昇時に作動油が供給されるロッド側貯留部とを備え、ボア側貯留部に対して作動油を流通させるボア側経路111と、各昇降用油圧シリンダ9,9のロッド側貯留部に対して作動油を流通させるロッド側経路112と、ボア側経路111とロッド側経路112とに対して供給系統101の供給経路104と戻り経路105とを選択的に接続可能な方向切替弁113と、ボア側経路111とロッド側経路112のそれぞれにおいて作動油の戻り側の流量を規制する速度制御弁114,114,114,114と、ボア側経路111とロッド側経路112とのそれぞれに設けられたパイロットチェックバルブ115,115と、制御信号に応じて昇降用油圧シリンダ9,9のロッド側貯留部の作動油を作動油タンク102に戻す経路に接続することが可能な2ポート2位置切替弁116,116とを主に備えている。
【0041】
方向切替弁113は3位置4ポート弁であり、制御装置90の制御に従って、ロッド側経路112を供給経路104に且つボア側経路111を戻り経路105に接続した状態と、ボア側経路111を供給経路104に且つロッド側経路112を戻り経路105に接続した状態と、ロッド側経路112とボア側経路111の両方を戻り経路105に接続した状態とに切り替えることが可能となっている。
これにより、制御装置90は、任意に前方ゴムタイヤ3,3の昇降を制御することが可能となっている。
【0042】
油圧系統120は、前方ガイド輪5,5を昇降させる一対の複動式の昇降用油圧シリンダ7,7がタイヤ下降時に作動油が供給されるロッド側貯留部とタイヤ上昇時に作動油が供給されるボア側貯留部とを備え、ボア側貯留部に対して作動油を流通させるボア側経路121と、各昇降用油圧シリンダ7,7のロッド側貯留部に対して作動油を流通させるロッド側経路122と、ボア側経路121とロッド側経路122とに対して供給系統101の供給経路104と戻り経路105とを選択的に接続可能な方向切替弁123と、ロッド側経路122において作動油の戻り側の流量を規制する速度制御弁124と、ボア側経路121とロッド側経路122とのそれぞれに設けられたパイロットチェックバルブ125,125と、昇降用油圧シリンダ7,7を通じて前方ガイド輪5,5の振動衝撃を緩和するためのアキュムレータ126とを主に備えている。
【0043】
方向切替弁123は3位置4ポート弁であり、制御装置90の制御に従って、ロッド側経路122を供給経路104に且つボア側経路121を戻り経路105に接続した状態と、ボア側経路121を供給経路104に且つロッド側経路122を戻り経路105に接続した状態と、ロッド側経路122とボア側経路121の両方を戻り経路105に接続した状態とに切り替えることが可能となっている。
これにより、制御装置90は、任意に前方ガイド輪5,5の昇降を制御することが可能となっている。
【0044】
アキュムレータ126は、一般に中空な容器の内部に圧縮ガス(窒素ガス)が封止されており、当該アキュムレータ126が接続された油圧経路内に圧縮ガスの圧力よりも高圧で作動油が供給されると、アキュムレータ126の内部にも作動油が蓄積され、油圧経路の圧力が圧縮ガスの圧力よりも低くなった場合に、蓄積した作動油を放出する蓄圧器である。
アキュムレータ126は、圧縮ガスの内部圧力は、軌道走行モードにおいて前方ガイド輪5,5が前方ゴムタイヤ3を上方に押し上げる際の作動油の供給圧力よりも幾分高く設定されている(例えば、10[MPa])。このため、アキュムレータ126内には、通常は作動油は蓄積されず、例えば、前方ガイド輪5が外部から振動や衝撃を受けて前方ガイド輪5,5が上方に押し上げられた場合に、昇降用油圧シリンダ7のボア側貯留部に供給される作動油がアキュムレータ126内に一時的に貯留されることで、車体2への振動や衝撃の伝達を抑制することが可能となっている。
【0045】
油圧系統130は、後方ガイド輪6,6を昇降させる一対の複動式の昇降用油圧シリンダ8,8がタイヤ下降時に作動油が供給されるロッド側貯留部とタイヤ上昇時に作動油が供給されるボア側貯留部とを備え、ボア側貯留部に対して作動油を流通させるボア側経路131と、各昇降用油圧シリンダ7,7のロッド側貯留部に対して作動油を流通させるロッド側経路132と、ボア側経路131とロッド側経路132とに対して供給系統101の供給経路104と戻り経路105とを選択的に接続可能な方向切替弁133と、ロッド側経路132において作動油の戻り側の流量を規制する流量調整弁134と、ロッド側経路132に設けられたパイロットチェックバルブ135と、ボア側経路131に設けられて各昇降用油圧シリンダ8,8への作動油の供給圧力を制御装置90の制御に基づいて調節する圧力制御弁136と、ボア側経路131における各昇降用油圧シリンダ8のボア側貯留部のすぐ手前に設けられた油圧シリンダの圧力低下防止用のアキュムレータ137と、圧力制御弁136とアキュムレータ137との間においてボア側経路131から分岐した作動油タンク102側への戻り経路138と、制御装置90の制御により各昇降用油圧シリンダ8,8のボア側貯留部を戻り経路138に接続可能な切替弁139と、戻り経路138の途中に設けられ、昇降用油圧シリンダ8のボア側貯留部が所定の圧力を超えると戻り経路138の流通を可能とするリリーフ弁140と、昇降用油圧シリンダ8,8のロッド側と流量調整弁134との間でロッド側経路132から分岐した作動油タンク102側への戻り経路141と、制御装置90の制御により各昇降用油圧シリンダ8,8のロッド側貯留部を戻り経路141へ接続可能な切替弁142と、各昇降用油圧シリンダ8のボア側貯留部への作動油の供給圧力を検出して制御装置90に出力する圧力計143とを主に備えている。
【0046】
方向切替弁133は3位置4ポート弁であり、制御装置90の制御に従って、ロッド側経路132を供給経路104に且つボア側経路131を戻り経路105に接続した状態と、ボア側経路131を供給経路104に且つロッド側経路132を戻り経路105に接続した状態と、ロッド側経路132とボア側経路131の両方を戻り経路105に接続した状態とに切り替えることが可能となっている。
これにより、制御装置90は、任意に後方ガイド輪6,6の昇降を制御することが可能となっている。
【0047】
また、前述した、後方ゴムタイヤ4と後方ガイド輪6の輪重の配分を制御する輪重制御は、制御装置90が圧力制御弁136を制御することで実現する。
この圧力制御弁136は、油圧ポンプ103が一定の出力で作動している状態において、制御指令の電流値に比例して昇降用油圧シリンダ8,8に付与する作動油の圧力を任意に変動させることが可能となっている。また、昇降用油圧シリンダ8,8に付与する作動油の圧力を任意に変動させることで、後方ガイド輪6,6の輪重を任意に制御することが可能となる。
そして、制御装置90は、圧力制御弁136の指令電流値と各指令電流値における後方ガイド輪6,6の輪重との対応関係を示すデータテーブルをそのメモリ内に保有しており、後方ガイド輪6,6を任意の輪重に制御することを可能としている。
また、制御装置90は、圧力制御弁136の指令電流値を任意に増減することにより、後方ガイド輪6,6の輪重を自在に増減させることができ、これにより、後方ゴムタイヤ4と後方ガイド輪6の輪重の配分を任意に制御することが可能となっている。
【0048】
後方ガイド輪6の油圧系統130におけるアキュムレータ137は、前方ガイド輪5の油圧系統120のアキュムレータ126と異なり、内部の圧縮ガス(窒素ガス)の封止圧力は、軌道走行モードにおいて輪重制御に基づいて昇降用油圧シリンダ8,8に供給される作動油の圧力よりも幾分低く設定されている(例えば、2.6[MPa])。このため、軌道走行モードにおいて、アキュムレータ137内には常に作動油が蓄積された状態にある。
そして、例えば、後方ゴムタイヤ4はレール上で何か(例えば降雪等)に乗り上げて車体2が急に押し上げられた場合に、油圧ポンプ103による作動油の供給が間に合わずに、後方ガイド輪6,6の車体2と共に押し上げられそうになった場合でも、このアキュムレータ137が素早く作動油を放出し、昇降用油圧シリンダ8,8のボア側貯留部に作動油を供給するので、後方ガイド輪6,6がレールから浮くことを防止することが可能である。
また、このアキュムレータ137は、作動油を十分に昇降用油圧シリンダ8,8に供給することができるように、前述した緩衝用のアキュムレータ126に比べて倍の容器(例えば、2[L])で作動油を貯留可能となっている。
【0049】
また、これに関連して、各昇降用油圧シリンダ8,8のロッド側貯留部に接続された切替弁142は、軌道走行モードにおいて、各昇降用油圧シリンダ8,8のロッド側貯留部が戻り経路141に接続されるよう制御装置90によって制御される。流量調整弁134は、逆止弁134aと絞り弁134bとが並列に設けられて構成されており、切替弁142により、流量調整弁134が有する絞り弁134bを介在することなく、昇降用油圧シリンダ8,8のロッド側貯留部の作動油を速やかに作動油タンク102に戻すことが可能となっている。このため、車体2が急に押し上げられて昇降用油圧シリンダ8,8のボア側貯留部にアキュムレータ137から作動油が供給される場合に、ロッド側貯留部の作動油が後方ガイド輪6,6の下降動作の妨げとならず、また、アキュムレータ137の内部圧力が低めに設定されている場合でも、速やかに昇降用油圧シリンダ8,8を下降動作方向に作動させることが可能となっている。
【0050】
[制御装置]
制御装置90は、デュアルモード車両1の機器全体を統合制御するCPUやRAM、各種制御プログラムや制御データを格納したROM等から構成されている。
上記制御装置90には、図2に示すように、圧力計143、車速センサ11、タイヤ回転速度センサ12、ブレーキセンサ79、昇降用油圧シリンダ7、8、9の方向切替弁113、123、133、油圧系統130の圧力制御弁136、切替弁139、142、油圧ポンプ103を駆動するモータ108等が図示しないインターフェイス又はドライバ回路を介して接続されている。
そして、制御装置90は、上記の制御系により、デュアルモード車両1の道路走行モードと軌道走行モードとを切り替える走行モード切り替え制御と、輪重制御とを実行する。
【0051】
[走行モード切り替え制御]
制御装置90は、道路走行モードから軌道走行モードへ切り替えを行う際には、方向切替弁113,123,133を通じて各昇降用油圧シリンダ9,7,8を作動させ、上方に退避していた前方ガイド輪5、後方ガイド輪6を下降させると共に、前方ゴムタイヤ3は離陸するまで上昇させる制御を行う。また、昇降用油圧シリンダ8については後方ゴムタイヤ4が離陸を生じない範囲で後方ガイド輪6がレールに接地する位置まで下降するよう制御を行う。これにより、デュアルモード車両1は、前方ガイド輪5及び後方ガイド輪6がレールに接地して軌道のレールにガイドされると共に、後方ゴムタイヤ4がレールに接地してエンジンからトルクを付与されて軌道走行を行うことが可能となる。
また、制御装置90は、軌道走行モードから道路走行モードへ切り替えを行う際には、方向切替弁113,123,133を通じて各昇降用油圧シリンダ9,7,8を作動させ前方ガイド輪5、後方ガイド輪6を上方に退避させると共に前方ゴムタイヤ3を下降させる。これにより、前方ゴムタイヤ3が下降して路面に接地し、後方ゴムタイヤ4がエンジンからトルクが付与されて道路走行を行うことが可能となる。
【0052】
[輪重制御]
輪重制御は、デュアルモード車両1が軌道走行モードで走行を行うことを前提とし、(1)制動時、(2)非制動時であって所定の低速走行時(0を超えて10[km/h]未満)、(3)非制動時であって所定速度範囲での通常走行時(10[km/h]以上)の個々の状況に応じて制御装置90が異なる制御を実行する。即ち、制御装置90は、輪重制御手段として機能する。
なお、軌道走行モードでの走行時には、常に油圧回路100の油圧ポンプ103が駆動継続状態にあり、昇降用油圧シリンダ8,8には常に一定の作動油の圧力が付与された状態にあることを前提とする。
【0053】
まず、非制動状態での通常走行時には、制御装置90は、後方ゴムタイヤ4,4の空転を検出して、当該空転検出時には、後方ガイド輪6,6の下降方向の出力を低減させるように(ボア側貯留部の圧力が低下するように)圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御し、空転非検出時には、後方ガイド輪6,6の下降方向の出力を上昇させるように(ボア側貯留部の圧力が増加するように)圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御する。
また、このとき、デュアルモード車両1の走行時の後部荷重に対して、第一の配分比率(40パーセント)を乗じた値を後方ガイド輪6,6の輪重の下限値として定め、空転の有無に拘わらず後方ガイド輪6,6の輪重が下限値を下回らないよう規制する。
【0054】
後方ゴムタイヤ4,4の空転検出は、制御装置90が、車速センサ11で検出された車両1の軌道走行速度(以下、「検出速度」という)と、タイヤ回転速度センサ12で検出された軌道走行時における後方ゴムタイヤ4の回転速度から算出された車両1の軌道走行速度(以下、「算出速度」という)とを比較して、検出速度と算出速度との差が所定の閾値以下である場合には後方ゴムタイヤ4が空転状態にないと判定し、検出速度と算出速度との差が所定の閾値を超える場合には後方ゴムタイヤ4が空転状態にあると判定する。
即ち、この場合、制御装置90は、空転判定手段として機能する。
【0055】
上記制御では、後方ガイド輪6,6の輪重の下限値を算出するために、その時の走行時の車両1の後部荷重をリアルタイムで計測する必要があるが、デュアルモード車両1は、搭乗者人数の変動により後部荷重が大きく変動すること、走行中は振動などの影響を受けて正しく後部荷重を検出できないこと等の事情があるので、実際に走行中に後部荷重を計測することは困難である。
従って、制御装置90は、車速センサ11の出力から車両1の停止が検出されると、ポテンショメータ13と圧力計143の出力を読み取り、それぞれのデータデーブルを参照して、後方ゴムタイヤ4の輪重と後方ガイド輪6の輪重とを算出し、それらを合計して求めた後部荷重を走行時の後部荷重として図示しないメモリに記録する。また、この走行時の後部荷重は、車両1が停止する毎に求められ、新たに上書きにより更新される。これにより、デュアルモード車両1は停止するたびに停止時の後部荷重が計測され更新される。一方、走行中に車両の後部荷重が変動する可能性は少ないので、車両1が停止する毎に新しい後部荷重を計測することで、走行中のリアルタイムの後部荷重とほぼ同値の後部荷重を取得することが可能となっている。
そして、走行時には、最新の後部荷重に基づいて後方ガイド輪6,6の輪重の下限値を算出し、輪重制御において常にこれを下回らないように昇降用油圧シリンダ8,8の出力に対して規制を行う。
【0056】
また、非制動状態での低速走行時には、制御装置90は、後方ゴムタイヤ4,4の空転検出は行わず、デュアルモード車両1の空車積載時の後部荷重に対して、第一の配分比率よりも大きい第二の配分比率(例えば46パーセント)を乗じた目標値を維持するように、圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御する。
なお、デュアルモード車両1の空車積載時の後部荷重は、車両設定時点で求められる変動の生じない固定値であり、予め制御装置90のメモリ内に登録されているのでこれを参照する。
デュアルモード車両1が、非制動状態で低速走行を行っている状態は、主として、走行開始時の加速状態である場合が多く、そのような場合には、後方ゴムタイヤ4,4が確実にレール上にホールドして走行駆動力が得られるように、後方ガイド輪6,6の後部荷重の分配比率を通常走行時よりも低く、後方ゴムタイヤ4,4の後部荷重の分配比率を通常走行時よりも高く設定している。
【0057】
また、制動時には、制御装置90は、後方ゴムタイヤ4,4の空転検出は行わず、デュアルモード車両1の走行時点での後部荷重に対して、第一の配分比率(40パーセント)を乗じた目標値を維持するように、圧力制御弁136を通じて昇降用油圧シリンダ8,8を制御する。
また、このとき、デュアルモード車両1の空車積載時の後部荷重に対して、第二の配分比率(46パーセント)を乗じた値を後方ガイド輪6,6の輪重の下限値として定め、後方ガイド輪6,6の輪重が下限値を下回らないよう規制する。
【0058】
上記制動時の制御の場合も、後方ガイド輪6,6の輪重の目標値を特定するために走行時の車両1の後部荷重を取得する必要があるが、その手法は非制動状態での通常走行時の場合と同様である。
【0059】
デュアルモード車両1の制動時には、車両の後部荷重が低減するので、後方ガイド輪6,6の輪重を低い値に固定することで後方ゴムタイヤ4,4の輪重を余分に確保し、後方ゴムタイヤ4,4による制動力の確保を行っている。
【0060】
[輪重制御における動作説明]
次に、図8のフローチャートに基づいて輪重制御における詳細な動作説明を行う。輪重制御は、デュアルモード車両1が軌道走行モードであって走行中であることを前提とする。
図8に示すように、軌道走行モードでの走行中において、制御装置90は、ブレーキセンサ79によるブレーキ操作の有無を判定し(ステップS1)、ブレーキ操作を検知しない場合には(ステップS1:NO)、車速センサ11からデュアルモード車両1の車速を検出する。
そして、デュアルモード車両1の車速が低速域(10[km/h]未満)か否かを判定する(ステップS3)。
【0061】
そして、デュアルモード車両1の車速が低速域ではない場合には(ステップS3:NO)、車速センサ11から求まる車速に対するタイヤ回転速度センサ12から求まる車速の差を求め、その値が予め定めた閾値を超えるか否かによって後方ゴムタイヤ4,4の空転の発生を判定する(ステップS5)。
その結果、空転が発生していないと判定した場合には、制御装置90は、圧力制御弁136により後方ガイド輪6,6の輪重が増加するように昇降用油圧シリンダ8,8を制御して処理を終了する(ステップS6)。
【0062】
また、空転が発生していると判定した場合には(ステップS5:YES)、制御装置90は、後方ガイド輪6,6の輪重の下限値を、直近で更新された走行時の車両の後部荷重の値に40パーセントを乗じて算出する(ステップS7)。
そして、圧力計143の検出出力から現在の後方ガイド輪6,6の輪重を算出し、輪重の下限値を超えているか否かを判定する(ステップS8)。
そして、後方ガイド輪6,6の輪重が下限値以下の場合には、当該後方ガイド輪6,6の輪重が下限値となるように圧力制御弁136を制御して処理を終了する(ステップS9)。
また、後方ガイド輪6,6の輪重が下限値より大きい場合には、制御装置90は、圧力制御弁136により後方ガイド輪6,6の輪重が低下するように昇降用油圧シリンダ8,8を制御して処理を終了する(ステップS11)。
【0063】
また、ステップS3において、デュアルモード車両1の車速が低速域であると判定した場合には(ステップS3:YES)、制御装置90は、後方ガイド輪6,6の輪重の目標値を、予め登録された空車時の車両の後部荷重の値に46パーセントを乗じて算出する(ステップS13)。
次いで、圧力制御弁136により、後方ガイド輪6,6の輪重が目標値となるように制御して処理を終了する(ステップS15)。
【0064】
また、ステップS1において、ブレーキセンサ79によるブレーキ操作が検出された場合には(ステップS1:YES)、制御装置90は、後方ガイド輪6,6の輪重の下限値を、予め登録された空車時の車両の後部荷重の値に46パーセントを乗じて算出する。また、後方ガイド輪6,6の輪重の目標値を、直近で更新された走行時の車両の後部荷重の値に40パーセントを乗じて算出する(ステップS17)。
そして、後方ガイド輪6,6の輪重の目標値と後方ガイド輪6,6の輪重の下限値とを比較し(ステップS19)、目標値の方が大きければ、圧力制御弁136により、後方ガイド輪6,6の輪重が目標値となるように制御して処理を終了する(ステップS21)。
また、下限値の方が大きければ、圧力制御弁136により、後方ガイド輪6,6の輪重が下限値となるように制御して処理を終了する(ステップS23)。
なお、このステップS1〜S23までの処理は、所定周期で繰り返し実行される。
【0065】
[後方ガイド輪の昇降用油圧シリンダの油圧系統の挙動]
軌道走行モードによる走行時の後方ガイド輪の昇降用油圧シリンダの油圧系統130の挙動について図9及び図10に基づいて説明する。図9(A)は通常の走行状態における油圧の伝達状態を示し,図9(B)は車体2が押し上げられたときの油圧の伝達状態を示す。また、図10(A)は後方ゴムタイヤ4がレール上で積雪などの障害物Sに乗り上げた瞬間の状態を示し、図10(B)は車体2が押し上げられた時の後方ガイド輪6の動作状態を示す。
【0066】
図9(A)に示すように、軌道走行モードでは、制御装置90により、方向切替弁133が、ボア側経路131を供給経路104に接続し且つロッド側経路132を戻り経路105に接続した状態に切り替えられ、切替弁142が昇降用油圧シリンダ8のロッド側貯留部を戻り経路141に接続した状態に切り替えられる。
【0067】
なお、この切替弁142による昇降用油圧シリンダ8のロッド側貯留部の戻り経路141への切り替え動作は、制御装置90の制御により、道路走行モードから軌道走行モードへの切り替える場合に、後方ガイド輪6,6がレールに下降する動作が完了した時点で行われるようになっている。
即ち、後方ガイド輪6,6がレールに下降する動作を行う際には、切替弁142は昇降用油圧シリンダ8のロッド側貯留部を絞り弁134bを有する流量調整弁134が介在するロッド側経路132に接続し、ロッド側貯留部からの作動油の排出時のノッキングを防止している。そして、軌道走行モードでの走行中は、ロッド側貯留部を絞り弁が介在しない戻り経路141に接続することで速やかな作動油の排出を可能としている。
【0068】
その結果、ボア側経路131には所定の圧力で作動油が供給され、また、ボア側経路131に分岐接続されたアキュムレータ137には作動油が蓄積される。
また、軌道走行モードでは、輪重制御が実施されるので、圧力制御弁136を通じて昇降用油圧シリンダ8,8のボア側貯留部に対して所定圧力で作動油が供給される。
【0069】
そして、図10(A)に示すように、後方ゴムタイヤ4がレール上で積雪などの障害物Sに乗り上げると、後方ゴムタイヤ4を支持するサスペンション装置が収縮した後に、図10(B)に示すように、車体2を押し上げる。
このとき、瞬間的に後方ガイド輪6はレールからの抗力がなくなり、その下側が開放された状態となるが、油圧ポンプ103の作動油の供給量は一定であることから,後方ガイド輪6を即座にレールまで下降させるために必要な作動油を供給しきれない状態となる。
一方、昇降用油圧シリンダ8のボア側貯留部は一時的に作動油の圧力に低下を生じるため、アキュムレータ137は、図9(B)に示すように、それまで蓄積していた作動油を即座に放出する。これにより、昇降用油圧シリンダ8のボア側貯留部に作動油が満たされる。
また、同時に、昇降用油圧シリンダ8のロッド側貯留部は、切替弁142によって戻り経路141に開放されているため、ロッド側貯留部の内部の作動油も速やかに排出することができる。
従って、車体2の浮き上がりの発生時に後方ガイド輪6は速やかに下降してレールから浮き上がることが防止される。
【0070】
[発明の実施の形態の効果]
上記デュアルモード車両1は、軌道走行モードにおいて、輪重制御を行うことで、後方ゴムタイヤ4,4の空転の発生を極力抑えつつ、後方ガイド輪6,6の輪重抜けを防止することが可能である。
そして、油圧回路100において、後方ガイド輪6,6の昇降を行う昇降用油圧シリンダ8,8に油圧シリンダの圧力低下防止用のアキュムレータ137を併設したので、後方ゴムタイヤ4,4がレール上の段差となる何らかの障害物などに乗り上げて車体2の浮き上がりが生じた場合に、後方ガイド輪6,6を速やかに下降させることができ、当該ガイド輪6,6の浮き上がりを防止することが可能となる。
また、アキュムレータ137は、通常走行時の輪重制御において後方ガイド輪6,6が輪重の下限値を得るために昇降用油圧シリンダ8,8に供給する圧力以下の圧力で作動油を貯留可能としている。このため、輪重制御の実行により昇降用油圧シリンダ8,8への作動油の圧力が絶えず変動する場合であっても、油圧回路100内の圧力変動の影響を受けることなく常に作動油を貯留することができ、輪重制御の実施している場合でも常にアキュムレータ137を作動させることができ、常に後方ガイド輪6,6の浮き上がりを防止することができ、走行安定性の向上を図ることが可能となる。
【0071】
また、デュアルモード車両1は、前方ガイド輪5,5の支持機構50と後方ガイド輪6,6の支持機構60とに、それぞれバネ式のサスペンション54、64を併設したので、油圧回路100に設けたアキュムレータ137が作動油を貯留する圧力を低く設定することで前方ガイド輪5,5と後方ガイド輪6,6の高周波振動を抑制する効果が得られない場合であっても、各サスペンション54、64がこれを緩和し、乗り心地や走行安定性の向上を図ることが可能である。
【0072】
[その他]
なお、上記デュアルモード車両1では、後方ガイド輪6,6の輪重や車体の後部荷重を求める際に、油圧回路100の圧力計143の検出出力を利用しているが、これに限るものではない。
例えば、圧力制御弁136に対する制御電流値と後方ガイド輪6,6の輪重との間で一定の関係が成立し、制御電流値を定まると一定の輪重となるような高い再現性を有する場合には、圧力制御弁136に対する制御電流値を読み取ることで後方ガイド輪6,6の輪重を求めることが可能である。従って、圧力制御弁136の制御電流値と後方ガイド輪6,6の輪重との関係を示すデータデーブル等を制御装置90のメモリ内に用意し、圧力制御弁136の制御電流値から後方ガイド輪6,6の輪重を特定することも可能である。その場合、油圧回路100の圧力計143及びそのデータテーブルは不要とすることができる。
【符号の説明】
【0073】
1 デュアルモード車両(走行車両)
2 車体
3 前方ゴムタイヤ(道路走行用タイヤ)
3a,4a ゴムタイヤ用車軸
4 後方ゴムタイヤ(道路走行用タイヤ)
5 前方ガイド輪(軌道走行用車輪)
5a,6a ガイド輪用車軸
6 後方ガイド輪(軌道走行用車輪)
7,8,9 昇降用油圧シリンダ(アクチュエータ)
7a ロッド
11 車速センサ
12 タイヤ回転速度センサ
13 ポテンショメータ
50,60 支持機構
53,63 緩衝装置
54,64 バネ式のサスペンション
90 制御装置(空転判定手段、輪重制御手段)
100 油圧回路
101 供給系統
102 作動油タンク
103 油圧ポンプ
110,120,130 油圧系統
113,123,133 方向切替弁
134 流量調整弁
134b 絞り弁
136 圧力制御弁
137 油圧シリンダの圧力低下防止用のアキュムレータ
139,142 切替弁
141 戻し経路
143 圧力計
【特許請求の範囲】
【請求項1】
車体の前側と後側の各々に設けられた一対の軌道走行用車輪と、
車体の前側と後側の各々に設けられた一対の道路走行用タイヤと、
前記前側と後側の一対の軌道走行用車輪をそれぞれ昇降させる前側と後側の昇降用の油圧シリンダと、
前記油圧シリンダに作動油を供給する油圧回路と、
を備え、
前記油圧シリンダにより、前記前側と後側の一対の軌道走行用車輪を上昇させて前記道路走行用タイヤのみで走行を行う道路走行モードと、前記前側と後側の一対の軌道走行用車輪を下降させて当該軌道走行用車輪と前後いずれか一対の道路走行用タイヤとがレールに接地させた状態で走行を行う軌道走行モードとを切り替え可能な走行車両であって、
前記レールに接地させた一対の道路走行用タイヤが空転しているか否かを判定する空転判定手段と、
前記空転判定手段が空転していると判定した場合に、前記レールに接地させた一対の道路走行用タイヤに隣接する前記一対の軌道走行用車輪の輪重を予め定められた下限値を限度として低減し、空転していないと判定した場合に、前記一対の軌道走行用車輪の輪重を高めるように、前記油圧シリンダの出力を制御する輪重制御手段とを備え、
前記油圧回路は、前記一対の軌道走行用車輪の輪重を制御する油圧シリンダに対して車輪下降圧力を付与する油圧経路に設けられ、前記輪重の下限値に相当する圧力以下の圧力で内部に作動油を貯留可能である、前記油圧シリンダの圧力低下防止用のアキュムレータを有することを特徴とする走行車両。
【請求項2】
前記一対の軌道走行用車輪の輪重を制御する油圧シリンダは、車輪下降時に作動油が供給される貯留部と車輪上昇時に作動油が供給される貯留部とを備える複動式であって、
前記油圧回路は、前記油圧シリンダの車輪下降時に作動油が供給される貯留部から作動油を作動油タンクに直接的に戻すために、絞り弁が介在しない戻し経路を備えていることを特徴とする請求項1記載の走行車両。
【請求項3】
前記一対の軌道走行用車輪にバネ式のサスペンションを併設したことを特徴とする請求項1又は2記載の走行車両。
【請求項1】
車体の前側と後側の各々に設けられた一対の軌道走行用車輪と、
車体の前側と後側の各々に設けられた一対の道路走行用タイヤと、
前記前側と後側の一対の軌道走行用車輪をそれぞれ昇降させる前側と後側の昇降用の油圧シリンダと、
前記油圧シリンダに作動油を供給する油圧回路と、
を備え、
前記油圧シリンダにより、前記前側と後側の一対の軌道走行用車輪を上昇させて前記道路走行用タイヤのみで走行を行う道路走行モードと、前記前側と後側の一対の軌道走行用車輪を下降させて当該軌道走行用車輪と前後いずれか一対の道路走行用タイヤとがレールに接地させた状態で走行を行う軌道走行モードとを切り替え可能な走行車両であって、
前記レールに接地させた一対の道路走行用タイヤが空転しているか否かを判定する空転判定手段と、
前記空転判定手段が空転していると判定した場合に、前記レールに接地させた一対の道路走行用タイヤに隣接する前記一対の軌道走行用車輪の輪重を予め定められた下限値を限度として低減し、空転していないと判定した場合に、前記一対の軌道走行用車輪の輪重を高めるように、前記油圧シリンダの出力を制御する輪重制御手段とを備え、
前記油圧回路は、前記一対の軌道走行用車輪の輪重を制御する油圧シリンダに対して車輪下降圧力を付与する油圧経路に設けられ、前記輪重の下限値に相当する圧力以下の圧力で内部に作動油を貯留可能である、前記油圧シリンダの圧力低下防止用のアキュムレータを有することを特徴とする走行車両。
【請求項2】
前記一対の軌道走行用車輪の輪重を制御する油圧シリンダは、車輪下降時に作動油が供給される貯留部と車輪上昇時に作動油が供給される貯留部とを備える複動式であって、
前記油圧回路は、前記油圧シリンダの車輪下降時に作動油が供給される貯留部から作動油を作動油タンクに直接的に戻すために、絞り弁が介在しない戻し経路を備えていることを特徴とする請求項1記載の走行車両。
【請求項3】
前記一対の軌道走行用車輪にバネ式のサスペンションを併設したことを特徴とする請求項1又は2記載の走行車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−245808(P2012−245808A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−116756(P2011−116756)
【出願日】平成23年5月25日(2011.5.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度独立行政法人新エネルギー・産業技術総合開発機構「エネルギー使用合理化技術戦略的開発/エネルギー使用合理化技術実用化開発/i−HAC(intelligent Hydraulic Axle Control)を利用した次世代型DMVの研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(590003825)北海道旅客鉄道株式会社 (94)
【出願人】(591117631)株式会社日本除雪機製作所 (18)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月25日(2011.5.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度独立行政法人新エネルギー・産業技術総合開発機構「エネルギー使用合理化技術戦略的開発/エネルギー使用合理化技術実用化開発/i−HAC(intelligent Hydraulic Axle Control)を利用した次世代型DMVの研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(590003825)北海道旅客鉄道株式会社 (94)
【出願人】(591117631)株式会社日本除雪機製作所 (18)
[ Back to top ]