
走行道路特定装置及び記憶媒体
【課題】自車位置に加えて自車の走行速度と渋滞情報とを考慮して自車の走行する道路を特定することによって、正確な道路の特定が可能となった走行道路特定装置及び記憶媒体を提供する。
【解決手段】自車の現在位置と走行速度を検出し、地図情報DB22に記憶された地図データに基づいてマッチング処理を行う際に、所定距離間隔で並設する道路があると判定された場合には、VICSセンタ102から通信装置18を介して渋滞情報を取得し(S15)、取得した渋滞情報と検出した自車の走行速度に基づいて作成(S20)された渋滞情報とを比較することにより、最も交通状況が近い道路を選択し(S28)、自車の走行する道路として特定する(S30)ように構成する。
【解決手段】自車の現在位置と走行速度を検出し、地図情報DB22に記憶された地図データに基づいてマッチング処理を行う際に、所定距離間隔で並設する道路があると判定された場合には、VICSセンタ102から通信装置18を介して渋滞情報を取得し(S15)、取得した渋滞情報と検出した自車の走行速度に基づいて作成(S20)された渋滞情報とを比較することにより、最も交通状況が近い道路を選択し(S28)、自車の走行する道路として特定する(S30)ように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検出した自車位置と地図データとに基づいて自車の走行する道路を特定する走行道路特定装置及び記憶媒体に関し、特に、自車位置に加えて自車の走行速度と渋滞情報とを考慮して自車の走行する道路を特定することによって、正確な道路の特定が可能となった走行道路特定装置及び記憶媒体に関するものである。
【背景技術】
【0002】
近年、車両の走行案内を行い、運転者が所望の目的地に容易に到着できるようにしたナビゲーション装置が車両に搭載されていることが多い。ここで、ナビゲーション装置とは、GPS受信機などにより自車の現在位置を検出し、その現在位置に対応する地図データをDVD−ROMやHDDなどの記録媒体またはネットワークを通じて取得して液晶モニタに表示することが可能な装置である。更に、かかるナビゲーション装置には、所望する目的地を入力すると、自車位置から目的地までの最適経路を探索する経路探索機能を備えており、ディスプレイ画面に誘導経路を表示するとともに、交差点に接近した場合等には音声による案内をすることによって、運転者を所望の目的地まで確実に案内するようになっている。
【0003】
ここで、前記ナビゲーション装置において自車位置の表示や経路の探索を行う為には、自車の走行する道路を地図上で特定する必要がある。従来では、GPSにより検出した自車の現在位置と地図データのみから道路の特定を行っていたが、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等には、上記要素だけでは正確に特定することができなかった。
そこで、例えば特開平2−137096号公報には、自車の走行速度を検出し、走行速度が所定速度以上である場合に走行する道路を高速道路として認識するナビゲーション装置について記載されている。上記ナビゲーション装置によれば高速道路と一般道路が並設されている場合に自車の走行する道路を特定することが可能となる。
【特許文献1】特開平2−137096号公報(第2−3頁、図3)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、前記した特許文献1に記載されたナビゲーション装置では、自車の走行速度のみから高速道路か一般道路かの判定を行うので、例えば、高速道路が渋滞し、低速で走行を行っている場合には、一般道路を走行していると誤認されてしまう場合があった。更に、前記した特許文献1に記載されたナビゲーション装置では、高速道路と一般道路等の道路属性の異なる道路が並設されている場合には道路の特定が可能であるが、同じ属性の道路(例えば、一般道路と一般道路)が並設されている場合には道路の特定ができなかった。
【0005】
本発明は前記従来における問題点を解消するためになされたものであり、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能であり、また、同じ属性の道路が並設されている場合においても道路の特定を可能とした走行道路特定装置及び記憶媒体を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するため本願の請求項1に係る走行道路特定装置(1)は、道路網を含む地図データを記憶する地図データ記憶手段(22)と、自車の現在位置を検出する自車位置検出手段(11)と、前記自車位置検出手段によって検出された自車の現在位置に基づいて前記地図データから自車の走行する道路を特定する道路特定手段(13)と、を有する走行道路特定装置において、道路の渋滞情報を取得する渋滞情報取得手段(18)と、自車の走行速度を検出する速度検出手段(21、31、35)と、を有し、前記道路特定手段は、前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする。
ここで、「渋滞情報」とは渋滞の程度、渋滞の長さ、渋滞の位置のいずれか一又は複数の情報を含む。
また、「渋滞情報取得手段」は外部の施設等と通信を行うことにより渋滞情報を取得することとしても良いし、走行道路特定装置の内部に記憶された渋滞情報を読み出すことにより取得することとしても良い。
【0007】
また、請求項2に係る走行道路特定装置(1)は、請求項1に記載の走行道路特定装置であって、前記車両が走行する道路に対して所定距離間隔で並設される道路があるか否かを判定する並設道路判定手段(13)を有し、前記道路特定手段(13)は、前記並設道路判定手段によって並設される道路があると判定された場合に前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段(18)により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする。
ここで、「所定距離間隔で並設される道路」とは、常に一定の間隔で並設される道路のみに限られず、間隔を変化させて並設される道路を含む。
【0008】
また、請求項3に係る走行道路特定装置(1)は、請求項2に記載の走行道路特定装置であって、前記並設道路判定手段(13)によって並設される道路があると判定された時点から前記車両が所定距離以上走行したか否かを判定する走行距離判定手段(13)を有し、前記道路特定手段(13)は、前記走行距離判定手段によって所定距離以上走行したと判定された場合に前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段(18)により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする。
【0009】
また、請求項4に係る走行道路特定装置(1)は、請求項1乃至請求項3のいずれかに記載の走行道路特定装置であって、前記道路特定手段(13)は、前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段(18)により取得した道路の渋滞情報とを比較する道路比較手段(13)を備え、前記道路比較手段の比較結果に基づいて交通状況が所定の基準より近い道路を自車の走行する道路に特定することを特徴とする。
【0010】
また、請求項5に係る走行道路特定装置(1)は、請求項1乃至請求項4のいずれかに記載の走行道路特定装置であって、前記渋滞情報取得手段(18)は所定距離間隔で並設された複数本の道路の渋滞情報を取得し、前記道路特定手段(13)は、前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路の渋滞情報とを比較する道路比較手段(13)を備え、前記道路比較手段の比較結果に基づいて前記複数本の道路の内、最も交通状況が近い道路を自車の走行する道路に特定することを特徴とする。
【0011】
また、請求項6に係る走行道路特定装置(1)は、請求項5に記載の走行道路特定装置であって、前記道路比較手段(13)は並設された複数本の道路について道路属性と自車の走行速度に基づいて渋滞情報を作成する渋滞情報作成手段(13)を備え、前記道路特定手段(13)は前記渋滞情報作成手段によって作成された渋滞情報に対して前記渋滞情報取得手段(18)により取得した渋滞情報が最も一致する道路を最も交通状況が近い道路とすることを特徴とする。
【0012】
また、請求項7に係る走行道路特定装置(1)は、請求項5又は請求項6に記載の走行道路特定装置であって、前記渋滞情報取得手段(18)は所定距離間隔で並設された複数本の道路を構成するリンク及びリンク間の渋滞情報を取得し、前記道路間比較手段(13)は、前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路を構成するリンク及びリンク間の渋滞情報とを比較することを特徴とする。
【0013】
更に、請求項8に係る記憶媒体は、自車の現在位置を検出する自車位置検出検出ステップ(S2)と、道路の渋滞情報を取得する渋滞情報取得ステップ(S15)と、自車の走行速度を検出する速度検出ステップ(S2)と、前記自車位置検出ステップによって検出された自車の現在位置と前記速度検出ステップによって検出された自車の走行速度と前記渋滞情報取得ステップにより取得した道路の渋滞情報とに基づいて記憶された地図データから自車の走行する道路を特定する道路特定ステップ(S11〜S30)と、を実行させる為のプログラムを記憶したコンピュータ読み取り可能な記憶媒体であることを特徴とする。
【発明の効果】
【0014】
前記構成を有する請求項1に係る走行道路特定装置では、道路の渋滞情報と自車の走行速度とに基づいて地図データから自車の走行する道路を特定するので、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が並設されている場合においても道路の特定が可能となる。そして、特定した道路の情報をナビゲーション装置に利用することによって、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な経路の探索や案内を行うことが可能となる。
【0015】
また、請求項2に係る走行道路特定装置では、所定距離間隔で並設される道路がある場合に、道路の渋滞情報と自車の走行速度とに基づいて地図データから自車の走行する道路を特定するので、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な道路の特定が可能となる。また、並設する道路が存在せず、自車の現在位置のみに基づいて自車の走行する道路が特定可能な場合には渋滞情報に基づく道路の特定を行わないので、制御装置の処理負担を軽減できる。
【0016】
また、請求項3に係る走行道路特定装置では、並設される道路があると判定された時点から車両が所定距離以上走行した場合に、道路の渋滞情報と自車の走行速度とに基づいて地図データから自車の走行する道路を特定するので、道路の特定を行う為の情報が十分に揃い、道路の特定が可能である状況下において正確な道路の特定が可能となる。また、十分に走行する道路の特定ができない場合には渋滞情報に基づく道路の特定を行わないので、制御装置の処理負担を軽減できる。
【0017】
また、請求項4に係る走行道路特定装置では、自車の走行速度と道路の渋滞情報とを比較し、交通状況が所定の基準より近い道路を自車の走行する道路に特定するので、交通状況が大きく異なる不適当な道路が自車の走行する道路として特定されることを防止できる。
【0018】
また、請求項5に係る走行道路特定装置では、所定距離間隔で並設された複数本の道路の渋滞情報を取得し、自車の走行速度と複数本の道路の渋滞情報とを比較することにより、最も交通状況が近い道路を自車の走行する道路に特定するので、高速道路と一般道路等の異なる属性の道路が複数本並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が複数本並設されている場合においても道路の特定が可能となる。
【0019】
また、請求項6に係る走行道路特定装置では、並設された複数本の道路について道路属性と自車の走行速度に基づいて渋滞情報を作成し、作成された渋滞情報と渋滞情報取得手段により取得した渋滞情報とが最も一致する道路を最も交通状況が近い道路とするので、高速道路と一般道路等の異なる属性の道路が複数本並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が複数本並設されている場合においても道路の特定が可能となる。
【0020】
また、請求項7に係る走行道路特定装置では、リンクとリンク間の渋滞情報を取得し、自車の走行速度と取得した渋滞情報とをリンク及びリンク間で比較することにより、最も交通状況が近い道路を自車の走行する道路に特定するので、道路を構成するリンクの配置及び繋がりを考慮して自車の走行する道路をより正確に特定することが可能である。
【0021】
更に、請求項8に係る記憶媒体では、取得した道路の渋滞情報と検出した自車の走行速度及び現在位置に基づいて地図データから自車の走行する道路を特定することを実行させるプログラムを記憶するので、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が並設されている場合においても道路の特定が可能となる。そして、特定した道路の情報をナビゲーション装置に利用することによって、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な経路の探索や案内を行うことが可能となる。
【発明を実施するための最良の形態】
【0022】
以下、本発明に係る走行道路特定装置についてナビゲーション装置に具体化した一実施形態に基づき図面を参照しつつ詳細に説明する。先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。
【0023】
先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。
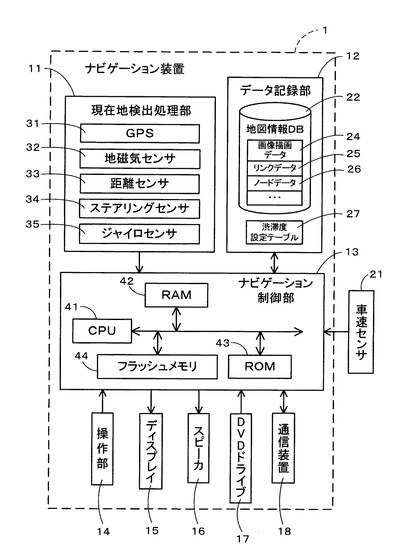
図1に示すように本実施形態に係るナビゲーション装置1は、自車の現在位置を検出する現在地検出処理部(自車位置検出手段)11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーション制御部(道路特定手段、並設道路判定手段、走行距離判定手段、道路比較手段、渋滞情報作成手段)13と、操作者からの操作を受け付ける操作部14と、操作者に対して地図等の情報を表示するディスプレイ15と、経路案内に関する音声ガイダンスを出力するスピーカ16と、プログラムを記憶した記憶媒体であるDVDを読み取るDVDドライブ17、交通情報センタ等の情報センタとの間で通信を行う通信装置(渋滞情報取得手段)18と、から構成されている。また、ナビゲーション制御部13には自車の走行速度を検出する車速センサ(速度検出手段)21が接続される。
【0024】
以下に、ナビゲーション装置1を構成する各構成要素について説明すると、現在地検出処理部11は、GPS(速度検出手段)31、地磁気センサ32、距離センサ33、ステアリングセンサ34、方位検出部としてのジャイロセンサ(速度検出手段)35、高度計(図示せず)等からなり、現在の自車の位置、方位、目標物(例えば、交差点)までの距離等を検出することが可能となっている。また、GPS31及びジャイロセンサ35によって車両の車速を検出することも可能であり、GPS31及びジャイロセンサ35は車速検出手段にも該当する。
【0025】
車速センサ21は、車両の移動距離や車速を検出する為のセンサであり、車両の車輪の回転に応じてパルスを発生させ、パルス信号をナビゲーション制御部13に出力する。そして、ナビゲーション制御部13は発生するパルスを計数することにより車輪の回転速度や移動距離を算出する。
【0026】
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB(地図データ記憶手段)22、自車の速度情報と道路属性に基づいて渋滞情報としての道路の渋滞度を設定する渋滞度設定テーブル27、所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。尚、本実施形態においては、データ記録部12の外部記憶装置及び記憶媒体としてハードディスクが使用されるが、ハードディスクのほかに、フレキシブルディスク等の磁気ディスクを外部記憶装置として使用することができる。また、メモリーカード、磁気テープ、磁気ドラム、CD、MD、DVD、光ディスク、MO、ICカード、光カード等を外部記憶装置として使用することもできる。尚、地図情報DB22及び渋滞度設定テーブル27の詳細については後述する。
【0027】
更に、ナビゲーション制御部13は、ナビゲーション装置1の全体の制御を行う演算装置及び制御装置としてのCPU41、並びにCPU41が各種の演算処理を行うに当たってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAM42、制御用のプログラムのほか、並設された複数本の道路から自車の走行する道路を特定する道路特定処理プログラム(図5、図6参照)が記録されたROM43、ROM43から読み出したプログラムを記録するフラッシュメモリ44等の内部記憶装置を備えている。
【0028】
また、本実施形態においては、前記ROM43に各種のプログラムが記録され、前記データ記録部12に各種のデータが記録されるようになっているが、プログラム、データ等を同じ外部記憶装置、メモリーカード等からプログラム、データ等を読み出して前記フラッシュメモリ44に書き込むこともできる。更に、DVDドライブ17で読み取った記憶媒体に記憶されている情報に基づいて前記プログラム、データ等を更新することができる。
【0029】
更に、前記ナビゲーション制御部13には、操作部14、ディスプレイ15、スピーカ16、DVDドライブ17、通信装置18の各周辺装置が電気的に接続されている。
【0030】
そして、通信装置18は、交通情報センタ、例えば、VICS(登録商標:Vehicle Information and Communication System)センタ102(図2参照)等から送信された渋滞情報、規制情報、駐車場情報、交通事故情報等の各情報から成る交通情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信するビーコンレシーバである。また、通信装置18としては、LAN、WAN、イントラネット、携帯電話回線網、電話回線網、公衆通信回線網、専用通信回線網、インターネット等の通信回線網等の通信系において通信を可能とするネットワーク機器であっても良い。更に、通信装置18は前記情報センタからの情報の他に、ニュース、天気予報等の情報から成るFM多重情報を、FM放送局を介してFM多重放送として受信するFM受信機を備える。尚、前記ビーコンレシーバ及びFM受信機は、ユニット化されてVICSレシーバとして配設されるようになっているが、別々に配設することもできる。
【0031】
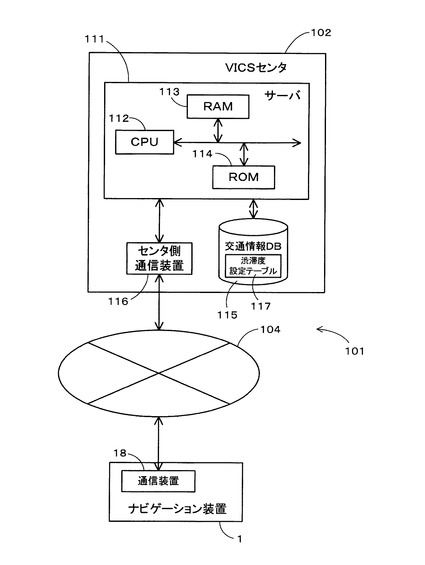
ここで、図2はナビゲーション装置1とVICSセンタ102とから構成される通信システム101を示した概略構成図である。図2に示すように、VICSセンタ102とナビゲーション装置1は、ネットワーク104を介して各種の情報の送受信が可能となるように構成されている。
【0032】
また、VICSセンタ102は、サーバ111と、サーバ111に接続された情報記録部としての交通情報DB115と、センタ側通信装置116とを備える。また、サーバ111は、サーバ111の全体の制御を行う演算装置及び制御装置としてのCPU112、並びにCPU112が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM113、ナビゲーション装置1からの通信に基づいて交通情報DB115に格納された交通情報から必要な情報を抽出し、ナビゲーション装置1に対して送信するための各種の制御プログラムが記録されたROM114等の内部記憶装置を備えている。
【0033】
また、交通情報DB115には渋滞度設定テーブル117が記憶されている。ここで、渋滞度設定テーブル117は道路を走行する車両の速度情報と道路属性に基づいて渋滞情報としての道路の渋滞度を設定する為のテーブルであり、その詳細については後述する。
【0034】
そして、VICSセンタ102はナビゲーション装置1に対して車両周辺の交通情報を送信し、一方で、ナビゲーション装置1はVICSセンタ102から送信された交通情報をRAM42に一時記憶し、この交通情報に基づいて経路の案内や探索を行う。また、特に渋滞情報に基づいて道路の自車の走行する道路を特定する。
【0035】
次に、データ記録部12に格納された地図情報DB22について説明する。ここで、地図情報DB22には、経路案内及び地図表示に必要な地図データが記録されており、地図データは、例えば地図、道路、交通情報等の画像をディスプレイ15に描画するための画像描画データ24、道路(リンク)に関するリンクデータ25、ノード点に関するノードデータ26、各交差点に関する交差点データ、経路を探索するための探索データ、施設に関する施設データ、地点を検索するための検索データ等から構成されている。
【0036】
これら地図情報DB22の内容は、DVDや外部に接続したメモリーカード等の記録媒体から情報を転送すること、又は特定の情報センタ等から通信装置18を介して情報をダウンロードすること等によって更新される。
【0037】
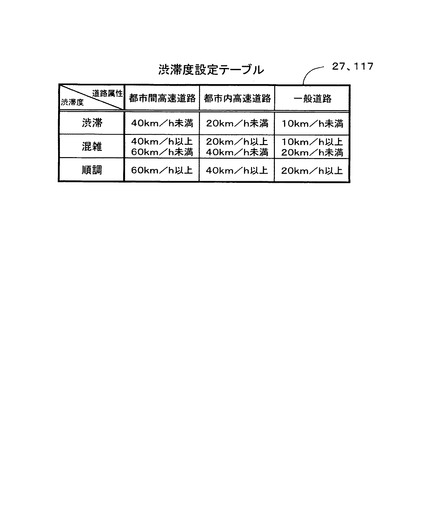
次に、ナビゲーション装置1のデータ記録部12及びVICSセンタ102の交通情報DB115に格納された渋滞度設定テーブル27、117について図3を用いて説明する。図3は本実施形態に係る渋滞度設定テーブル27、117について示した図である。ここで、渋滞度設定テーブル27は車両の走行速度に基づいて渋滞の程度を示す渋滞度を設定する為のテーブルであり、ナビゲーション装置1は車速センサ21、GPS31又はジャイロセンサ35等によって検出した自車の走行速度と渋滞度設定テーブル27に基づいて自車の現在走行する道路の渋滞度を設定する。一方、VICSセンタ102は全国の道路における各車両の平均走行速度を時間帯毎に検出し、検出した走行速度と渋滞度設定テーブル117に基づいて各道路の渋滞度を設定し、設定された渋滞度を含めた渋滞情報を交通情報として交通情報DB115に格納する。
【0038】
図3に示すように、本実施形態に係る渋滞度設定テーブル27、117は、「渋滞」、「混雑」、「順調」の3種類の渋滞度と、各渋滞度に対応する車両の走行速度範囲とから構成されている。また、車両の走行速度範囲は道路属性(「都市間高速道路」、「都市内高速道路」、「一般道路」の3種類)によって異なる範囲が設定されている。
例えば、車両が都市間高速道路を30km/hで走行する場合には渋滞度が「渋滞」に設定され、車両が都市内高速道路を30km/hで走行する場合には渋滞度が「混雑」に設定され、車両が一般道路を30km/hで走行する場合には渋滞度が「順調」に設定される。
【0039】
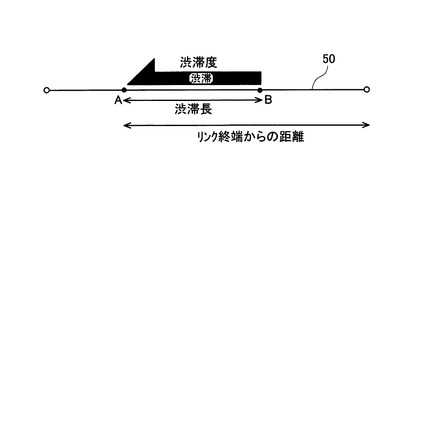
そして、VICSセンタ102は図3に示す渋滞度設定テーブル117で設定された渋滞度を用いて渋滞情報を作成する。図4はVICSセンタ102で作成される渋滞情報の一例を示す模式図である。
ここで、渋滞情報は渋滞度設定テーブル117で設定された渋滞度と渋滞長と渋滞開始点のリンク終端からの距離とから構成されている。例えば、図4に示すように都市内高速道路を構成するリンク50の地点A〜Bに示す区間で車両が15km/hで走行しているとVICSセンタ102が検出した場合には、「渋滞」に設定された渋滞度と地点A〜B間の距離とリンク50の終端からA地点までの距離からなる渋滞情報を作成し、交通情報DB115に格納する。
そして、渋滞情報をVICSセンタ102から受信したナビゲーション装置1は地図情報DB22に記憶されたリンクデータ25に渋滞情報を対応させることによって、道路上のどのエリアにおいてどの程度の渋滞が発生しているのかを把握することが可能となる。
【0040】
更に、本実施形態に係るナビゲーション装置1では自車の走行する道路に対して所定距離間隔で並設された道路があると判定した場合に、自車の走行速度と道路属性から渋滞度設定テーブル27を用いて実際に自車が現在走行している道路の渋滞情報を作成する。そして、作成した渋滞情報とVICSセンタ102から取得した渋滞情報とを比較することにより、自車の走行する道路を特定する(図6のS11〜S31)。
【0041】
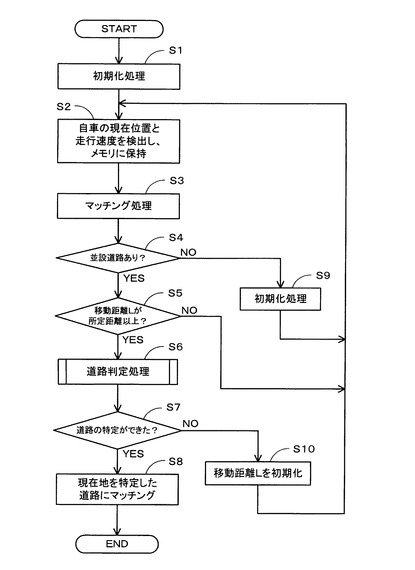
続いて、前記構成を有するナビゲーション装置1においてCPU41が実行する道路特定処理プログラムについて図5に基づき説明する。図5は本実施形態に係る道路特定処理プログラムのフローチャートである。ここで、道路特定処理プログラムは車両のイグニションがONされた後に所定時間間隔で実行され、並設された複数本の道路から自車の走行する道路を特定する道路特定処理プログラムである。尚、以下の図5及び図6にフローチャートで示されるプログラムは、ナビゲーション装置1が備えているRAM42、ROM43、データ記録部12等に記憶されており、CPU41により実行される。
【0042】
先ず、道路特定処理プログラムではステップ(以下、Sと略記する)1において、CPU41は初期化処理を行い、各種フラグや変数に初期値を代入する。次にS2では、CPU41は現在地検出処理部11の検出結果に基づいて自車の現在位置を検出し、また車速センサ21、GPS31又はジャイロセンサ35等により現在の車両の走行速度を検出する。その後、検出された自車の現在位置と走行速度をそれぞれRAM42に累積的に記憶する。
【0043】
次に、S3でCPU41はマッチング処理を行い、自車の現在位置を地図情報DB22に記憶された地図データに基づいて地図上で特定する。そして、S4では前記S3のマッチング処理の結果に基づいて、自車が走行する道路に対して所定距離間隔(例えば、30m以内)で並設される道路があるか否かを判定する。ここで、前記S3のマッチング処理を行う際に、GPS31等により検出した自車の現在位置と地図データのみからでは、GPSの精度やデータ誤差の問題から道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等に、自車の走行する道路の特定が困難となる。
【0044】
従って、自車が走行する道路に対して所定距離間隔で並設される道路があると判定された場合(S4:YES)にはS5へと移行し、後述するように自車の走行速度とVICSセンタ102から取得した渋滞情報に基づいて自車の走行する道路の特定を行う。尚、上記S4の処理が並設道路判定手段の処理に相当する。
【0045】
一方、自車が走行する道路に対して所定距離間隔で並設される道路がないと判定された場合(S4:NO)には、通常のマッチング処理のみで正確に自車の走行する道路の特定が可能となるので、初期化処理(S9)を行った後に再びS2へと戻る。
【0046】
S5において、CPU41は並設される道路がある状態での自車の移動距離L(即ち、前記S4で並設される道路があると最初に判定された時点からの移動距離L)が所定距離(例えば、1km)以上であるか否かを車速センサ21、GPS31又はジャイロセンサ35等の検出結果を基に判定する。尚、上記S5の処理が走行距離判定手段の処理に相当する。
【0047】
そして、自車の移動距離Lが所定距離以上であると判定された場合(S5:YES)にはS6へと移行し、自車の走行速度とVICSセンタ102から取得した渋滞情報とに基づいて自車の走行する道路を特定する後述の道路判定処理(図6参照)を行う。それに対し、自車の移動距離が所定距離以上でないと判定された場合(S5:NO)にはS2へと戻り、再度、自車の現在位置と走行速度の検出が行われる。
【0048】
次に、S7でCPU41は、前記S6の道路判定処理によって自車の走行する道路の特定ができたか否かを判定する。後述するように道路判定処理では、ナビゲーション装置1で作成した渋滞情報とVICSセンタ102から取得した渋滞情報とを比較することにより、自車の走行する道路の判定を行うが、渋滞情報の一致の度合いを示す正解率Sが並設された全ての道路で所定値未満である場合(図6のS29:NO)には、該当する道路が無いとして自車の走行する道路の特定が行われない。
【0049】
そして、S7の判定処理によってCPU41が自車の走行する道路の特定ができたと判定した場合(S7:YES)には、前記S6の道路判定処理によって特定された道路を自車が走行しているとして自車の現在位置をマッチングする(S8)。それによって、ナビゲーション装置1では設定された目的地への経路の探索や、設定された経路に沿った走行の案内を行う際に、地図上の正確な自車位置に基づいて経路の探索や案内を行うことが可能となる。
【0050】
一方、自車の走行する道路の特定ができなかったと判定した場合(S7:NO)には、並設される道路がある状態での自車の移動距離Lを初期化し(S10)、S2へと戻る。その後、再度自車の現在位置と走行速度の検出が行われる。
【0051】
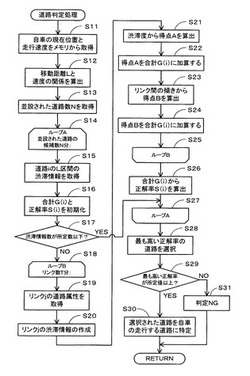
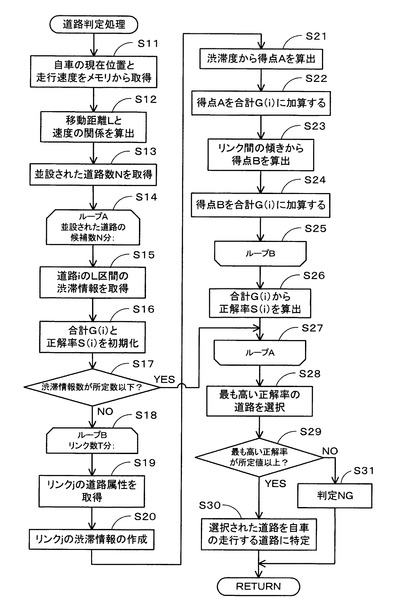
次に、前記S6でナビゲーション装置1のCPU41が実行する道路判定処理について図6に基づき説明する。図6は本実施形態に係る道路判定処理プログラムのフローチャートである。
【0052】
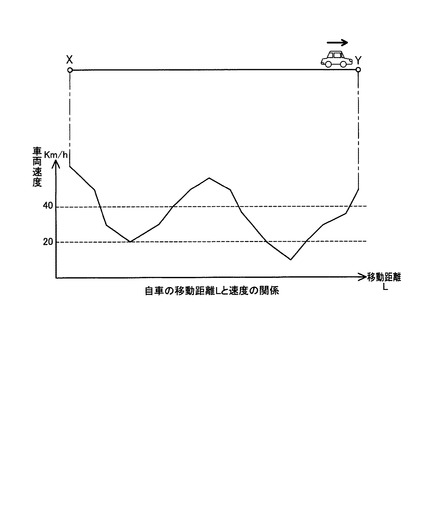
先ず、道路判定処理プログラムではS11において前記S2でRAM42に累積記憶された自車の現在位置と走行速度を読み出す。その後、S12では前記S11で取得した情報に基づいて、自車の移動距離Lと速度の関係を算出する。
ここで、図7は例えば並設された他の道路がある状態で所定の区間X〜Yまでを自車が所定の速度で走行した場合に、前記S12で算出される自車の移動距離Lと速度の関係の一例を示した図である。
【0053】
次に、S13では自車の走行する道路を含めた並設された道路の数Nを地図情報DB22に記憶された地図データから取得する。そして、S14以降では前記S13で取得した道路数N分だけS27までの間でループA処理を行う。
【0054】
先ず、ループA処理では前記S13で取得した道路の内、i番目の道路iにおける移動距離Lに含まれる区間の渋滞情報60について通信装置18を介してVICSセンタ102から取得する(S15)。尚、渋滞情報は所定時間間隔(例えば、10分間隔)で定期的にVICSセンタ102から通信装置18を介して取得し、RAM42に一時記憶しておくこともできる。
また、図8は前記S15でVICSセンタ102から取得した渋滞情報60の一例を示した図である。図8に示す渋滞情報60では、区間X〜Yの間で並設された一の道路を構成するリンクC〜Fについての計4個の渋滞情報を示している。具体的には、各渋滞情報によってリンクCの全体で「順調」であり、リンクDの全体で「混雑」であり、リンクEの全体で「渋滞」であり、リンクFの全体で「順調」であることを示している。
【0055】
次に、S16ではi番目の道路iにおける自車の走行速度とVICSセンタ102から取得した渋滞情報60との比較結果を示す得点A及び得点Bの合計G(i)と、交通状況の一致の度合いを示す正解率S(i)をそれぞれ初期化する。
更に、S17では前記S15で取得した渋滞情報60の数が所定数(例えば3個)以下であるか否かが判定される。
【0056】
そして、渋滞情報60の数が所定数以下であると判定された場合(S17:YES)には、道路iでは自車の走行速度と渋滞情報との比較をするのに十分な情報がないので、比較の処理を行うことなく終了する。その後、並設された道路の内、他の道路の比較が残っている場合には、S14以降の処理を繰り返し行う。
【0057】
一方、渋滞情報の数が所定数より多いと判定された場合(S17:NO)には、S18へと移行し、道路iを構成するリンク数T分だけS25までの間でループB処理を行う。
【0058】
先ず、ループB処理では道路iを構成するリンクの内、j番目のリンクjにおける道路属性を地図情報DB22に記憶されたリンクデータ25から取得する(S19)。
そして、S20でCPU41は自車が並設された道路の内、道路iを走行していると仮定して、前記S12で算出された移動距離Lと走行速度の関係及び道路属性からリンクjの渋滞情報61を作成する。
【0059】
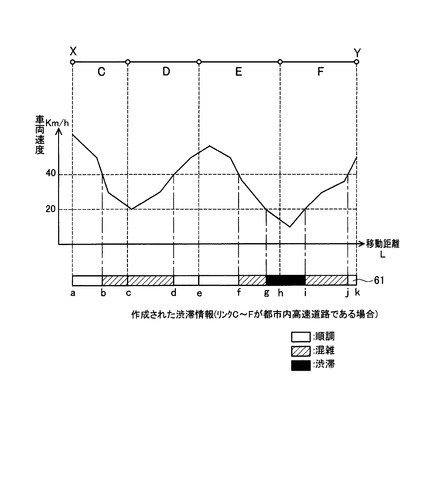
ここで、図9は例えば図7に示す速度関係で移動距離Lを自車が走行した場合において、区間X〜Yの間で並設された一の道路を構成するリンクC〜Fでナビゲーション装置1が作成した渋滞情報61を示す。尚、図9に示すリンクC〜Fの道路属性は全て都市内高速道路であるとする。
図9に示すように、リンクCの区間では地点a〜地点bまでの間で自車は40km/h以上の速度で走行し、且つ地点b〜地点cまでの間で20km/h以上の速度で走行している。従って、渋滞度設定テーブル27(図3参照)に基づいて、地点a〜地点bまでの間で「順調」の渋滞度が設定され、且つ地点b〜地点cまでの間で「混雑」の渋滞度が設定される。
また、リンクDの区間では地点c〜地点dまでの間で自車は20km/h以上の速度で走行し、且つ地点d〜地点eまでの間で40km/h以上の速度で走行している。従って、渋滞度設定テーブル27に基づいて、地点c〜地点dまでの間で「混雑」の渋滞度が設定され、且つ地点d〜地点eまでの間で「順調」の渋滞度が設定される。
また、リンクEの区間では地点e〜地点fまでの間で自車は40km/h以上の速度で走行し、地点f〜地点gまでの間で20km/h以上の速度で走行し、且つ地点g〜地点hまでの間で20km/h未満の速度で走行している。従って、渋滞度設定テーブル27に基づいて、地点e〜地点fまでの間で「順調」の渋滞度が設定され、地点f〜地点gまでの間で「混雑」の渋滞度が設定され、且つ地点g〜地点hまでの間で「渋滞」の渋滞度が設定される。
また、リンクFの区間では地点h〜地点iまでの間で自車は20km/h未満の速度で走行し、地点i〜地点jまでの間で20km/h以上の速度で走行し、且つ地点j〜地点kまでの間で20km/h未満の速度で走行している。従って、渋滞度設定テーブル27に基づいて、地点h〜地点iまでの間で「渋滞」の渋滞度が設定され、地点i〜地点jまでの間で「混雑」の渋滞度が設定され、且つ地点j〜地点kまでの間で「順調」の渋滞度が設定される。尚、上記S20の処理が渋滞情報作成手段の処理に相当する。
【0060】
次に、S21においてCPU41は、リンクjにおいて前記S20で作成された渋滞情報61と前記S15でVICSセンタ102から取得した渋滞情報60との間で、特に渋滞度を比較することにより交通状況(渋滞情報)の一致の度合いを示す得点Aを算出する。そして、算出した得点Aを合計(i)に加算する(S22)。
更に、S23ではリンクjにおいて前記S12で算出された移動距離Lと速度の関係と前記S15でVICSセンタ102から取得した渋滞情報60との間で、特にリンク間の速度の傾きを比較することにより交通状況(渋滞情報)の一致の度合いを示す得点Bを算出する。そして、算出した得点Bを合計(i)に加算する(S24)。
【0061】
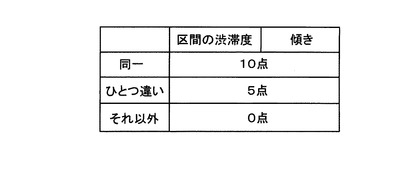
ここで、図10は得点A及び得点Bの算出方法を示した図であり、例えば、リンクjにおける前記S20で作成された渋滞情報61の渋滞度と、前記S15でVICSセンタ102から取得した渋滞情報60の渋滞度が同一である場合には、得点Aとして10点が加算される。また、渋滞度がひとつ違いである場合(例えば「渋滞」と「混雑」、「混雑」と「順調」)には、得点Aとして5点が加算される。更に、それ以外の場合(例えば「渋滞」と「順調」)には、得点Aには加算されない。尚、一のリンク内に複数の渋滞度が設定されている場合には、最も渋滞長の長い渋滞度が当該リンクの渋滞度としてみなされる。
【0062】
一方、前記S12で作成された移動距離Lと速度の関係(図7参照)におけるリンク間の速度の傾きと、前記S15でVICSセンタ102から取得した渋滞情報60におけるリンク間の速度の傾きを比較することにより、得点Bが加算される。
ここで、移動距離Lと速度の関係(図7参照)におけるリンク間の速度の傾きは、リンク間で移動距離Lに対して速度が上昇する場合には「+1」とし、移動距離Lに対して速度が下降する場合には「−1」とし、速度が変化しない場合には「0」とする。また、VICSセンタ102から取得した渋滞情報60におけるリンク間の速度の傾きは、リンク間で渋滞度が「渋滞」から「混雑」又は「混雑」から「順調」に変化する場合には「+1」とし、渋滞度が「渋滞」から「順調」に変化する場合には「+2」とし、渋滞度が「順調」から「混雑」又は「混雑」から「渋滞」に変化する場合には「−1」とし、渋滞度が「順調」から「混雑」に変化する場合には「−2」とし、渋滞度が変化しない場合には「0」とする。そして、傾きが同一である場合(例えば「−1」と「−1」、「+1」と「+1」)には、得点Bとして10点が加算される。また、傾きがひとつ違いである場合(例えば「−1」と「−2」、「0」と「+1」)には、得点Bとして5点が加算される。更に、それ以外の場合(例えば「−1」と「+1」)には、得点Bには加算されない。
【0063】
尚、図11は、例えば図8に示す渋滞情報60をVICSセンタ102より取得し、且つ図9に示す渋滞情報61が作成された場合に合計G(i)に加算される得点の一覧を示したものである。図11に示すようにナビゲーション装置1で作成された渋滞情報61では、リンクCは「順調」の渋滞度が最も長く設定されており、リンクDは「混雑」の渋滞度が最も長く設定されており、リンクEは「順調」の渋滞度が最も長く設定されており、リンクFは「混雑」の渋滞度が最も長く設定されている。また、VICSセンタ102から取得した渋滞情報60では、リンクCは「順調」の渋滞度が最も長く設定されており、リンクDは「混雑」の渋滞度が最も長く設定されており、リンクEは「渋滞」の渋滞度が最も長く設定されており、リンクFは「順調」の渋滞度が最も長く設定されている。
従って、得点Aとしては、リンクCは10点、リンクDは10点、リンクEは0点、リンクFは5点が加算される。
【0064】
一方、図11に示すように検出した自車速度に基づく移動距離Lと速度の関係におけるリンク間の速度の傾きは、リンクCとリンクDの間は「−1」であり、リンクDとリンクEの間は「+1」であり、リンクEとリンクFの間は「−1」である。また、VICSセンタ102から取得した渋滞情報60におけるリンク間の速度の傾きは、リンクCとリンクDの間は「−1」であり、リンクDとリンクEの間は「−1」であり、リンクEとリンクFの間は「+2」である。従って、得点Bとしては、リンクCとリンクDの間は10点、リンクDとリンクEの間は0点、リンクEとリンクFの間は0点が加算される。
【0065】
続いて、S25でCPU41は道路iを構成するリンク数T分だけループB処理が終了したか否かを判定し、終了したと判定された場合にはS26へと移行する。それに対し、終了していない場合には継続してループAの処理を行う。
【0066】
また、S26では前記S22及びS24で加算されたi番目の道路iにおける得点A及び得点Bの合計G(i)に基づいて正解率S(i)を算出する。具体的には、得点A及び得点Bが満点の場合における合計点(図11の場合には70点)に対する割合が正解率(図11の場合には50%)として算出される。尚、上記S14〜S27の処理が道路比較手段の処理に相当する。
【0067】
次に、S27でCPU41は並設された道路の数N分だけループA処理が終了したか否かを判定し、終了したと判定された場合にはS28へと移行する。それに対し、終了していない場合には継続してループBの処理を行う。
【0068】
S28でCPU41は、前記S13で取得した並設された複数の道路数の内、最も正解率の高い道路を、最も交通状況の近い道路として選択する。そして、S29では前記S28で選択された道路の正解率が所定値(例えば、70%)以上であるか否かが判定される。
【0069】
その結果、道路の正解率が所定値(例えば、70%)以上であると判定された場合(S29:YES)には、前記S28で選択された道路を自車の走行する道路として特定し(S30)、S7(図5参照)へと移行する。
一方、道路の正解率が所定値未満であると判定された場合(S29:NO)には、前記S28で選択された道路は自車の走行する道路として特定するには交通状況が大きく異なり、不適当な道路であるので、自車の走行する道路として特定せず(S31)、S7(図5参照)へと移行する。尚、上記S11〜S30の処理が道路特定手段の処理に相当する。
【0070】
尚、より正確に自車の走行した道路の特定を行う為に、自車の走行速度や渋滞情報のみに基づいて判定するのではなく、他の複数の検知結果を総合的に考慮して判定しても良い。他の検知結果としては、例えば、GPS衛星からの電波を考慮したり、ビーコン受信を考慮することが可能である。また、過去に自車が走行した道路について考慮することも可能である。そして、上記した他の複数の検知結果に対しても得点を割り付け、その合計に基づいて道路を判定することによって、より精度を向上させることが可能となる。
【0071】
以上詳細に説明した通り、本実施形態に係るナビゲーション装置1では、自車の現在位置と走行速度を検出し(S2)、地図情報DB22に記憶された地図データに基づいてマッチング処理を行う際に、所定距離間隔で並設する道路があると判定された場合(S4:YES)には、VICSセンタ102から通信装置18を介して渋滞情報を取得し(S15)、取得した渋滞情報と検出した自車の走行速度に基づいて作成(S20)された渋滞情報とを比較することにより、最も交通状況が近い道路を選択し(S28)、自車の走行する道路として特定する(S30)ので、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が並設されている場合においても道路の特定が可能となる。そして、特定した道路の情報をナビゲーション装置1で利用することによって、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な経路の探索や案内を行うことが可能となる。
また、並設する道路が存在せず(S4:NO)、自車の現在位置のみに基づいて自車の走行する道路が特定可能な場合には渋滞情報に基づく道路の特定を行わないので、正確な経路の探索や案内を行いつつ制御装置の処理負担を軽減できる。
また、並設される道路があると判定された時点から車両が所定距離以上走行した場合(S5:YES)に自車の走行する道路を特定するので、道路の特定を行う為の情報が十分に揃い、道路の特定が可能である状況下において正確な道路の特定が可能となる。また、十分に走行する道路の特定ができない場合には渋滞情報に基づく道路の特定を行わないので、制御装置の処理負担を軽減できる。
また、自車の走行速度とVICSセンタ102から通信装置18を介して取得した渋滞情報とをリンク及びリンク間でそれぞれ比較することにより得点を算出し、最も交通状況が近い道路を自車の走行する道路に特定するので、道路を構成するリンクの配置及び繋がりを考慮して自車の走行する道路をより正確に特定することが可能である。
更に、渋滞情報を比較した際の交通状況の類似を示す正解率S(i)が、所定値(例えば70%)より高い道路を自車の走行する道路に特定するので、交通状況が大きく異なる不適当な道路が自車の走行する道路として特定されることを防止できる。
【0072】
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態ではS12で算出した移動距離Lと速度の関係に基づいて渋滞情報61を作成し(S20)、VICSセンタ102から取得した渋滞情報60と比較することによって道路の特定を行うように構成しているが、VICSセンタ102から取得した渋滞情報に基づいて並設される各道路について移動距離Lと速度の関係を作成し、S12で算出した移動距離Lと速度の関係と比較することによって交通状況の近い道路を判定し、道路の特定を行うようにしても良い。
【0073】
また、本実施形態では自車の走行速度に基づいて設定された渋滞度を比較した得点Aと、自車の走行速度と渋滞度のリンク間における速度の傾きを比較した得点Bとを合計し、正解率を算出することによって交通状況の近い道路を判定することとしていたが、得点A又は得点Bのみで正解率を算出し、交通状況の近い道路を判定することとしても良い。
【0074】
また、本実施形態では並設された道路がある場合にのみに自車の走行速度とVICSセンタ102から取得した渋滞情報とに基づいて自車の走行する道路の特定を行うように構成されているが、並設された道路がない場合でも、より正確に自車の走行する道路の特定を行う為に自車の走行速度とVICSセンタ102から取得した渋滞情報とに基づいて自車の走行する道路の特定を行うようにしても良い。
【図面の簡単な説明】
【0075】
【図1】本実施形態に係るナビゲーション装置を示したブロック図である。
【図2】本実施形態に係るナビゲーション装置を含む通信システムを示した概略構成図である。
【図3】本実施形態に係る渋滞度設定テーブルを示した図である。
【図4】VICSセンタで作成される渋滞情報の一例を示す模式図である。
【図5】本実施形態に係る道路特定処理プログラムのフローチャートである。
【図6】本実施形態に係る道路判定処理プログラムのフローチャートである。
【図7】所定の区間X〜Yまでを自車が走行した場合に、ステップ12で算出される自車の移動距離Lと速度の関係の一例を示した図である。
【図8】ステップ15でVICSセンタから取得した渋滞情報の一例を示した図である。
【図9】図7に示す速度関係で移動距離Lを自車が走行した場合において、区間X〜Yの間で並設された一の道路を構成するリンクC〜Fでナビゲーション装置が作成した渋滞情報を示す図である。
【図10】得点A及び得点Bの算出方法を示した図である。
【図11】図8に示す渋滞情報を取得し、且つ図9に示す渋滞情報が作成された場合に合計Gに加算される得点の一覧を示した図である。
【符号の説明】
【0076】
1 ナビゲーション装置
11 現在地検出処理部
12 データ記録部
13 ナビゲーション制御部
17 DVDドライブ
18 通信装置
21 車速センサ
22 地図情報DB
27 渋滞度設定テーブル
41 CPU
42 RAM
43 ROM
【技術分野】
【0001】
本発明は、検出した自車位置と地図データとに基づいて自車の走行する道路を特定する走行道路特定装置及び記憶媒体に関し、特に、自車位置に加えて自車の走行速度と渋滞情報とを考慮して自車の走行する道路を特定することによって、正確な道路の特定が可能となった走行道路特定装置及び記憶媒体に関するものである。
【背景技術】
【0002】
近年、車両の走行案内を行い、運転者が所望の目的地に容易に到着できるようにしたナビゲーション装置が車両に搭載されていることが多い。ここで、ナビゲーション装置とは、GPS受信機などにより自車の現在位置を検出し、その現在位置に対応する地図データをDVD−ROMやHDDなどの記録媒体またはネットワークを通じて取得して液晶モニタに表示することが可能な装置である。更に、かかるナビゲーション装置には、所望する目的地を入力すると、自車位置から目的地までの最適経路を探索する経路探索機能を備えており、ディスプレイ画面に誘導経路を表示するとともに、交差点に接近した場合等には音声による案内をすることによって、運転者を所望の目的地まで確実に案内するようになっている。
【0003】
ここで、前記ナビゲーション装置において自車位置の表示や経路の探索を行う為には、自車の走行する道路を地図上で特定する必要がある。従来では、GPSにより検出した自車の現在位置と地図データのみから道路の特定を行っていたが、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等には、上記要素だけでは正確に特定することができなかった。
そこで、例えば特開平2−137096号公報には、自車の走行速度を検出し、走行速度が所定速度以上である場合に走行する道路を高速道路として認識するナビゲーション装置について記載されている。上記ナビゲーション装置によれば高速道路と一般道路が並設されている場合に自車の走行する道路を特定することが可能となる。
【特許文献1】特開平2−137096号公報(第2−3頁、図3)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、前記した特許文献1に記載されたナビゲーション装置では、自車の走行速度のみから高速道路か一般道路かの判定を行うので、例えば、高速道路が渋滞し、低速で走行を行っている場合には、一般道路を走行していると誤認されてしまう場合があった。更に、前記した特許文献1に記載されたナビゲーション装置では、高速道路と一般道路等の道路属性の異なる道路が並設されている場合には道路の特定が可能であるが、同じ属性の道路(例えば、一般道路と一般道路)が並設されている場合には道路の特定ができなかった。
【0005】
本発明は前記従来における問題点を解消するためになされたものであり、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能であり、また、同じ属性の道路が並設されている場合においても道路の特定を可能とした走行道路特定装置及び記憶媒体を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するため本願の請求項1に係る走行道路特定装置(1)は、道路網を含む地図データを記憶する地図データ記憶手段(22)と、自車の現在位置を検出する自車位置検出手段(11)と、前記自車位置検出手段によって検出された自車の現在位置に基づいて前記地図データから自車の走行する道路を特定する道路特定手段(13)と、を有する走行道路特定装置において、道路の渋滞情報を取得する渋滞情報取得手段(18)と、自車の走行速度を検出する速度検出手段(21、31、35)と、を有し、前記道路特定手段は、前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする。
ここで、「渋滞情報」とは渋滞の程度、渋滞の長さ、渋滞の位置のいずれか一又は複数の情報を含む。
また、「渋滞情報取得手段」は外部の施設等と通信を行うことにより渋滞情報を取得することとしても良いし、走行道路特定装置の内部に記憶された渋滞情報を読み出すことにより取得することとしても良い。
【0007】
また、請求項2に係る走行道路特定装置(1)は、請求項1に記載の走行道路特定装置であって、前記車両が走行する道路に対して所定距離間隔で並設される道路があるか否かを判定する並設道路判定手段(13)を有し、前記道路特定手段(13)は、前記並設道路判定手段によって並設される道路があると判定された場合に前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段(18)により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする。
ここで、「所定距離間隔で並設される道路」とは、常に一定の間隔で並設される道路のみに限られず、間隔を変化させて並設される道路を含む。
【0008】
また、請求項3に係る走行道路特定装置(1)は、請求項2に記載の走行道路特定装置であって、前記並設道路判定手段(13)によって並設される道路があると判定された時点から前記車両が所定距離以上走行したか否かを判定する走行距離判定手段(13)を有し、前記道路特定手段(13)は、前記走行距離判定手段によって所定距離以上走行したと判定された場合に前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段(18)により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする。
【0009】
また、請求項4に係る走行道路特定装置(1)は、請求項1乃至請求項3のいずれかに記載の走行道路特定装置であって、前記道路特定手段(13)は、前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段(18)により取得した道路の渋滞情報とを比較する道路比較手段(13)を備え、前記道路比較手段の比較結果に基づいて交通状況が所定の基準より近い道路を自車の走行する道路に特定することを特徴とする。
【0010】
また、請求項5に係る走行道路特定装置(1)は、請求項1乃至請求項4のいずれかに記載の走行道路特定装置であって、前記渋滞情報取得手段(18)は所定距離間隔で並設された複数本の道路の渋滞情報を取得し、前記道路特定手段(13)は、前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路の渋滞情報とを比較する道路比較手段(13)を備え、前記道路比較手段の比較結果に基づいて前記複数本の道路の内、最も交通状況が近い道路を自車の走行する道路に特定することを特徴とする。
【0011】
また、請求項6に係る走行道路特定装置(1)は、請求項5に記載の走行道路特定装置であって、前記道路比較手段(13)は並設された複数本の道路について道路属性と自車の走行速度に基づいて渋滞情報を作成する渋滞情報作成手段(13)を備え、前記道路特定手段(13)は前記渋滞情報作成手段によって作成された渋滞情報に対して前記渋滞情報取得手段(18)により取得した渋滞情報が最も一致する道路を最も交通状況が近い道路とすることを特徴とする。
【0012】
また、請求項7に係る走行道路特定装置(1)は、請求項5又は請求項6に記載の走行道路特定装置であって、前記渋滞情報取得手段(18)は所定距離間隔で並設された複数本の道路を構成するリンク及びリンク間の渋滞情報を取得し、前記道路間比較手段(13)は、前記速度検出手段(21、31、35)によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路を構成するリンク及びリンク間の渋滞情報とを比較することを特徴とする。
【0013】
更に、請求項8に係る記憶媒体は、自車の現在位置を検出する自車位置検出検出ステップ(S2)と、道路の渋滞情報を取得する渋滞情報取得ステップ(S15)と、自車の走行速度を検出する速度検出ステップ(S2)と、前記自車位置検出ステップによって検出された自車の現在位置と前記速度検出ステップによって検出された自車の走行速度と前記渋滞情報取得ステップにより取得した道路の渋滞情報とに基づいて記憶された地図データから自車の走行する道路を特定する道路特定ステップ(S11〜S30)と、を実行させる為のプログラムを記憶したコンピュータ読み取り可能な記憶媒体であることを特徴とする。
【発明の効果】
【0014】
前記構成を有する請求項1に係る走行道路特定装置では、道路の渋滞情報と自車の走行速度とに基づいて地図データから自車の走行する道路を特定するので、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が並設されている場合においても道路の特定が可能となる。そして、特定した道路の情報をナビゲーション装置に利用することによって、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な経路の探索や案内を行うことが可能となる。
【0015】
また、請求項2に係る走行道路特定装置では、所定距離間隔で並設される道路がある場合に、道路の渋滞情報と自車の走行速度とに基づいて地図データから自車の走行する道路を特定するので、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な道路の特定が可能となる。また、並設する道路が存在せず、自車の現在位置のみに基づいて自車の走行する道路が特定可能な場合には渋滞情報に基づく道路の特定を行わないので、制御装置の処理負担を軽減できる。
【0016】
また、請求項3に係る走行道路特定装置では、並設される道路があると判定された時点から車両が所定距離以上走行した場合に、道路の渋滞情報と自車の走行速度とに基づいて地図データから自車の走行する道路を特定するので、道路の特定を行う為の情報が十分に揃い、道路の特定が可能である状況下において正確な道路の特定が可能となる。また、十分に走行する道路の特定ができない場合には渋滞情報に基づく道路の特定を行わないので、制御装置の処理負担を軽減できる。
【0017】
また、請求項4に係る走行道路特定装置では、自車の走行速度と道路の渋滞情報とを比較し、交通状況が所定の基準より近い道路を自車の走行する道路に特定するので、交通状況が大きく異なる不適当な道路が自車の走行する道路として特定されることを防止できる。
【0018】
また、請求項5に係る走行道路特定装置では、所定距離間隔で並設された複数本の道路の渋滞情報を取得し、自車の走行速度と複数本の道路の渋滞情報とを比較することにより、最も交通状況が近い道路を自車の走行する道路に特定するので、高速道路と一般道路等の異なる属性の道路が複数本並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が複数本並設されている場合においても道路の特定が可能となる。
【0019】
また、請求項6に係る走行道路特定装置では、並設された複数本の道路について道路属性と自車の走行速度に基づいて渋滞情報を作成し、作成された渋滞情報と渋滞情報取得手段により取得した渋滞情報とが最も一致する道路を最も交通状況が近い道路とするので、高速道路と一般道路等の異なる属性の道路が複数本並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が複数本並設されている場合においても道路の特定が可能となる。
【0020】
また、請求項7に係る走行道路特定装置では、リンクとリンク間の渋滞情報を取得し、自車の走行速度と取得した渋滞情報とをリンク及びリンク間で比較することにより、最も交通状況が近い道路を自車の走行する道路に特定するので、道路を構成するリンクの配置及び繋がりを考慮して自車の走行する道路をより正確に特定することが可能である。
【0021】
更に、請求項8に係る記憶媒体では、取得した道路の渋滞情報と検出した自車の走行速度及び現在位置に基づいて地図データから自車の走行する道路を特定することを実行させるプログラムを記憶するので、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が並設されている場合においても道路の特定が可能となる。そして、特定した道路の情報をナビゲーション装置に利用することによって、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な経路の探索や案内を行うことが可能となる。
【発明を実施するための最良の形態】
【0022】
以下、本発明に係る走行道路特定装置についてナビゲーション装置に具体化した一実施形態に基づき図面を参照しつつ詳細に説明する。先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。
【0023】
先ず、本実施形態に係るナビゲーション装置1の概略構成について図1を用いて説明する。図1は本実施形態に係るナビゲーション装置1を示したブロック図である。
図1に示すように本実施形態に係るナビゲーション装置1は、自車の現在位置を検出する現在地検出処理部(自車位置検出手段)11と、各種のデータが記録されたデータ記録部12と、入力された情報に基づいて、各種の演算処理を行うナビゲーション制御部(道路特定手段、並設道路判定手段、走行距離判定手段、道路比較手段、渋滞情報作成手段)13と、操作者からの操作を受け付ける操作部14と、操作者に対して地図等の情報を表示するディスプレイ15と、経路案内に関する音声ガイダンスを出力するスピーカ16と、プログラムを記憶した記憶媒体であるDVDを読み取るDVDドライブ17、交通情報センタ等の情報センタとの間で通信を行う通信装置(渋滞情報取得手段)18と、から構成されている。また、ナビゲーション制御部13には自車の走行速度を検出する車速センサ(速度検出手段)21が接続される。
【0024】
以下に、ナビゲーション装置1を構成する各構成要素について説明すると、現在地検出処理部11は、GPS(速度検出手段)31、地磁気センサ32、距離センサ33、ステアリングセンサ34、方位検出部としてのジャイロセンサ(速度検出手段)35、高度計(図示せず)等からなり、現在の自車の位置、方位、目標物(例えば、交差点)までの距離等を検出することが可能となっている。また、GPS31及びジャイロセンサ35によって車両の車速を検出することも可能であり、GPS31及びジャイロセンサ35は車速検出手段にも該当する。
【0025】
車速センサ21は、車両の移動距離や車速を検出する為のセンサであり、車両の車輪の回転に応じてパルスを発生させ、パルス信号をナビゲーション制御部13に出力する。そして、ナビゲーション制御部13は発生するパルスを計数することにより車輪の回転速度や移動距離を算出する。
【0026】
また、データ記録部12は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB(地図データ記憶手段)22、自車の速度情報と道路属性に基づいて渋滞情報としての道路の渋滞度を設定する渋滞度設定テーブル27、所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。尚、本実施形態においては、データ記録部12の外部記憶装置及び記憶媒体としてハードディスクが使用されるが、ハードディスクのほかに、フレキシブルディスク等の磁気ディスクを外部記憶装置として使用することができる。また、メモリーカード、磁気テープ、磁気ドラム、CD、MD、DVD、光ディスク、MO、ICカード、光カード等を外部記憶装置として使用することもできる。尚、地図情報DB22及び渋滞度設定テーブル27の詳細については後述する。
【0027】
更に、ナビゲーション制御部13は、ナビゲーション装置1の全体の制御を行う演算装置及び制御装置としてのCPU41、並びにCPU41が各種の演算処理を行うに当たってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAM42、制御用のプログラムのほか、並設された複数本の道路から自車の走行する道路を特定する道路特定処理プログラム(図5、図6参照)が記録されたROM43、ROM43から読み出したプログラムを記録するフラッシュメモリ44等の内部記憶装置を備えている。
【0028】
また、本実施形態においては、前記ROM43に各種のプログラムが記録され、前記データ記録部12に各種のデータが記録されるようになっているが、プログラム、データ等を同じ外部記憶装置、メモリーカード等からプログラム、データ等を読み出して前記フラッシュメモリ44に書き込むこともできる。更に、DVDドライブ17で読み取った記憶媒体に記憶されている情報に基づいて前記プログラム、データ等を更新することができる。
【0029】
更に、前記ナビゲーション制御部13には、操作部14、ディスプレイ15、スピーカ16、DVDドライブ17、通信装置18の各周辺装置が電気的に接続されている。
【0030】
そして、通信装置18は、交通情報センタ、例えば、VICS(登録商標:Vehicle Information and Communication System)センタ102(図2参照)等から送信された渋滞情報、規制情報、駐車場情報、交通事故情報等の各情報から成る交通情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信するビーコンレシーバである。また、通信装置18としては、LAN、WAN、イントラネット、携帯電話回線網、電話回線網、公衆通信回線網、専用通信回線網、インターネット等の通信回線網等の通信系において通信を可能とするネットワーク機器であっても良い。更に、通信装置18は前記情報センタからの情報の他に、ニュース、天気予報等の情報から成るFM多重情報を、FM放送局を介してFM多重放送として受信するFM受信機を備える。尚、前記ビーコンレシーバ及びFM受信機は、ユニット化されてVICSレシーバとして配設されるようになっているが、別々に配設することもできる。
【0031】
ここで、図2はナビゲーション装置1とVICSセンタ102とから構成される通信システム101を示した概略構成図である。図2に示すように、VICSセンタ102とナビゲーション装置1は、ネットワーク104を介して各種の情報の送受信が可能となるように構成されている。
【0032】
また、VICSセンタ102は、サーバ111と、サーバ111に接続された情報記録部としての交通情報DB115と、センタ側通信装置116とを備える。また、サーバ111は、サーバ111の全体の制御を行う演算装置及び制御装置としてのCPU112、並びにCPU112が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM113、ナビゲーション装置1からの通信に基づいて交通情報DB115に格納された交通情報から必要な情報を抽出し、ナビゲーション装置1に対して送信するための各種の制御プログラムが記録されたROM114等の内部記憶装置を備えている。
【0033】
また、交通情報DB115には渋滞度設定テーブル117が記憶されている。ここで、渋滞度設定テーブル117は道路を走行する車両の速度情報と道路属性に基づいて渋滞情報としての道路の渋滞度を設定する為のテーブルであり、その詳細については後述する。
【0034】
そして、VICSセンタ102はナビゲーション装置1に対して車両周辺の交通情報を送信し、一方で、ナビゲーション装置1はVICSセンタ102から送信された交通情報をRAM42に一時記憶し、この交通情報に基づいて経路の案内や探索を行う。また、特に渋滞情報に基づいて道路の自車の走行する道路を特定する。
【0035】
次に、データ記録部12に格納された地図情報DB22について説明する。ここで、地図情報DB22には、経路案内及び地図表示に必要な地図データが記録されており、地図データは、例えば地図、道路、交通情報等の画像をディスプレイ15に描画するための画像描画データ24、道路(リンク)に関するリンクデータ25、ノード点に関するノードデータ26、各交差点に関する交差点データ、経路を探索するための探索データ、施設に関する施設データ、地点を検索するための検索データ等から構成されている。
【0036】
これら地図情報DB22の内容は、DVDや外部に接続したメモリーカード等の記録媒体から情報を転送すること、又は特定の情報センタ等から通信装置18を介して情報をダウンロードすること等によって更新される。
【0037】
次に、ナビゲーション装置1のデータ記録部12及びVICSセンタ102の交通情報DB115に格納された渋滞度設定テーブル27、117について図3を用いて説明する。図3は本実施形態に係る渋滞度設定テーブル27、117について示した図である。ここで、渋滞度設定テーブル27は車両の走行速度に基づいて渋滞の程度を示す渋滞度を設定する為のテーブルであり、ナビゲーション装置1は車速センサ21、GPS31又はジャイロセンサ35等によって検出した自車の走行速度と渋滞度設定テーブル27に基づいて自車の現在走行する道路の渋滞度を設定する。一方、VICSセンタ102は全国の道路における各車両の平均走行速度を時間帯毎に検出し、検出した走行速度と渋滞度設定テーブル117に基づいて各道路の渋滞度を設定し、設定された渋滞度を含めた渋滞情報を交通情報として交通情報DB115に格納する。
【0038】
図3に示すように、本実施形態に係る渋滞度設定テーブル27、117は、「渋滞」、「混雑」、「順調」の3種類の渋滞度と、各渋滞度に対応する車両の走行速度範囲とから構成されている。また、車両の走行速度範囲は道路属性(「都市間高速道路」、「都市内高速道路」、「一般道路」の3種類)によって異なる範囲が設定されている。
例えば、車両が都市間高速道路を30km/hで走行する場合には渋滞度が「渋滞」に設定され、車両が都市内高速道路を30km/hで走行する場合には渋滞度が「混雑」に設定され、車両が一般道路を30km/hで走行する場合には渋滞度が「順調」に設定される。
【0039】
そして、VICSセンタ102は図3に示す渋滞度設定テーブル117で設定された渋滞度を用いて渋滞情報を作成する。図4はVICSセンタ102で作成される渋滞情報の一例を示す模式図である。
ここで、渋滞情報は渋滞度設定テーブル117で設定された渋滞度と渋滞長と渋滞開始点のリンク終端からの距離とから構成されている。例えば、図4に示すように都市内高速道路を構成するリンク50の地点A〜Bに示す区間で車両が15km/hで走行しているとVICSセンタ102が検出した場合には、「渋滞」に設定された渋滞度と地点A〜B間の距離とリンク50の終端からA地点までの距離からなる渋滞情報を作成し、交通情報DB115に格納する。
そして、渋滞情報をVICSセンタ102から受信したナビゲーション装置1は地図情報DB22に記憶されたリンクデータ25に渋滞情報を対応させることによって、道路上のどのエリアにおいてどの程度の渋滞が発生しているのかを把握することが可能となる。
【0040】
更に、本実施形態に係るナビゲーション装置1では自車の走行する道路に対して所定距離間隔で並設された道路があると判定した場合に、自車の走行速度と道路属性から渋滞度設定テーブル27を用いて実際に自車が現在走行している道路の渋滞情報を作成する。そして、作成した渋滞情報とVICSセンタ102から取得した渋滞情報とを比較することにより、自車の走行する道路を特定する(図6のS11〜S31)。
【0041】
続いて、前記構成を有するナビゲーション装置1においてCPU41が実行する道路特定処理プログラムについて図5に基づき説明する。図5は本実施形態に係る道路特定処理プログラムのフローチャートである。ここで、道路特定処理プログラムは車両のイグニションがONされた後に所定時間間隔で実行され、並設された複数本の道路から自車の走行する道路を特定する道路特定処理プログラムである。尚、以下の図5及び図6にフローチャートで示されるプログラムは、ナビゲーション装置1が備えているRAM42、ROM43、データ記録部12等に記憶されており、CPU41により実行される。
【0042】
先ず、道路特定処理プログラムではステップ(以下、Sと略記する)1において、CPU41は初期化処理を行い、各種フラグや変数に初期値を代入する。次にS2では、CPU41は現在地検出処理部11の検出結果に基づいて自車の現在位置を検出し、また車速センサ21、GPS31又はジャイロセンサ35等により現在の車両の走行速度を検出する。その後、検出された自車の現在位置と走行速度をそれぞれRAM42に累積的に記憶する。
【0043】
次に、S3でCPU41はマッチング処理を行い、自車の現在位置を地図情報DB22に記憶された地図データに基づいて地図上で特定する。そして、S4では前記S3のマッチング処理の結果に基づいて、自車が走行する道路に対して所定距離間隔(例えば、30m以内)で並設される道路があるか否かを判定する。ここで、前記S3のマッチング処理を行う際に、GPS31等により検出した自車の現在位置と地図データのみからでは、GPSの精度やデータ誤差の問題から道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等に、自車の走行する道路の特定が困難となる。
【0044】
従って、自車が走行する道路に対して所定距離間隔で並設される道路があると判定された場合(S4:YES)にはS5へと移行し、後述するように自車の走行速度とVICSセンタ102から取得した渋滞情報に基づいて自車の走行する道路の特定を行う。尚、上記S4の処理が並設道路判定手段の処理に相当する。
【0045】
一方、自車が走行する道路に対して所定距離間隔で並設される道路がないと判定された場合(S4:NO)には、通常のマッチング処理のみで正確に自車の走行する道路の特定が可能となるので、初期化処理(S9)を行った後に再びS2へと戻る。
【0046】
S5において、CPU41は並設される道路がある状態での自車の移動距離L(即ち、前記S4で並設される道路があると最初に判定された時点からの移動距離L)が所定距離(例えば、1km)以上であるか否かを車速センサ21、GPS31又はジャイロセンサ35等の検出結果を基に判定する。尚、上記S5の処理が走行距離判定手段の処理に相当する。
【0047】
そして、自車の移動距離Lが所定距離以上であると判定された場合(S5:YES)にはS6へと移行し、自車の走行速度とVICSセンタ102から取得した渋滞情報とに基づいて自車の走行する道路を特定する後述の道路判定処理(図6参照)を行う。それに対し、自車の移動距離が所定距離以上でないと判定された場合(S5:NO)にはS2へと戻り、再度、自車の現在位置と走行速度の検出が行われる。
【0048】
次に、S7でCPU41は、前記S6の道路判定処理によって自車の走行する道路の特定ができたか否かを判定する。後述するように道路判定処理では、ナビゲーション装置1で作成した渋滞情報とVICSセンタ102から取得した渋滞情報とを比較することにより、自車の走行する道路の判定を行うが、渋滞情報の一致の度合いを示す正解率Sが並設された全ての道路で所定値未満である場合(図6のS29:NO)には、該当する道路が無いとして自車の走行する道路の特定が行われない。
【0049】
そして、S7の判定処理によってCPU41が自車の走行する道路の特定ができたと判定した場合(S7:YES)には、前記S6の道路判定処理によって特定された道路を自車が走行しているとして自車の現在位置をマッチングする(S8)。それによって、ナビゲーション装置1では設定された目的地への経路の探索や、設定された経路に沿った走行の案内を行う際に、地図上の正確な自車位置に基づいて経路の探索や案内を行うことが可能となる。
【0050】
一方、自車の走行する道路の特定ができなかったと判定した場合(S7:NO)には、並設される道路がある状態での自車の移動距離Lを初期化し(S10)、S2へと戻る。その後、再度自車の現在位置と走行速度の検出が行われる。
【0051】
次に、前記S6でナビゲーション装置1のCPU41が実行する道路判定処理について図6に基づき説明する。図6は本実施形態に係る道路判定処理プログラムのフローチャートである。
【0052】
先ず、道路判定処理プログラムではS11において前記S2でRAM42に累積記憶された自車の現在位置と走行速度を読み出す。その後、S12では前記S11で取得した情報に基づいて、自車の移動距離Lと速度の関係を算出する。
ここで、図7は例えば並設された他の道路がある状態で所定の区間X〜Yまでを自車が所定の速度で走行した場合に、前記S12で算出される自車の移動距離Lと速度の関係の一例を示した図である。
【0053】
次に、S13では自車の走行する道路を含めた並設された道路の数Nを地図情報DB22に記憶された地図データから取得する。そして、S14以降では前記S13で取得した道路数N分だけS27までの間でループA処理を行う。
【0054】
先ず、ループA処理では前記S13で取得した道路の内、i番目の道路iにおける移動距離Lに含まれる区間の渋滞情報60について通信装置18を介してVICSセンタ102から取得する(S15)。尚、渋滞情報は所定時間間隔(例えば、10分間隔)で定期的にVICSセンタ102から通信装置18を介して取得し、RAM42に一時記憶しておくこともできる。
また、図8は前記S15でVICSセンタ102から取得した渋滞情報60の一例を示した図である。図8に示す渋滞情報60では、区間X〜Yの間で並設された一の道路を構成するリンクC〜Fについての計4個の渋滞情報を示している。具体的には、各渋滞情報によってリンクCの全体で「順調」であり、リンクDの全体で「混雑」であり、リンクEの全体で「渋滞」であり、リンクFの全体で「順調」であることを示している。
【0055】
次に、S16ではi番目の道路iにおける自車の走行速度とVICSセンタ102から取得した渋滞情報60との比較結果を示す得点A及び得点Bの合計G(i)と、交通状況の一致の度合いを示す正解率S(i)をそれぞれ初期化する。
更に、S17では前記S15で取得した渋滞情報60の数が所定数(例えば3個)以下であるか否かが判定される。
【0056】
そして、渋滞情報60の数が所定数以下であると判定された場合(S17:YES)には、道路iでは自車の走行速度と渋滞情報との比較をするのに十分な情報がないので、比較の処理を行うことなく終了する。その後、並設された道路の内、他の道路の比較が残っている場合には、S14以降の処理を繰り返し行う。
【0057】
一方、渋滞情報の数が所定数より多いと判定された場合(S17:NO)には、S18へと移行し、道路iを構成するリンク数T分だけS25までの間でループB処理を行う。
【0058】
先ず、ループB処理では道路iを構成するリンクの内、j番目のリンクjにおける道路属性を地図情報DB22に記憶されたリンクデータ25から取得する(S19)。
そして、S20でCPU41は自車が並設された道路の内、道路iを走行していると仮定して、前記S12で算出された移動距離Lと走行速度の関係及び道路属性からリンクjの渋滞情報61を作成する。
【0059】
ここで、図9は例えば図7に示す速度関係で移動距離Lを自車が走行した場合において、区間X〜Yの間で並設された一の道路を構成するリンクC〜Fでナビゲーション装置1が作成した渋滞情報61を示す。尚、図9に示すリンクC〜Fの道路属性は全て都市内高速道路であるとする。
図9に示すように、リンクCの区間では地点a〜地点bまでの間で自車は40km/h以上の速度で走行し、且つ地点b〜地点cまでの間で20km/h以上の速度で走行している。従って、渋滞度設定テーブル27(図3参照)に基づいて、地点a〜地点bまでの間で「順調」の渋滞度が設定され、且つ地点b〜地点cまでの間で「混雑」の渋滞度が設定される。
また、リンクDの区間では地点c〜地点dまでの間で自車は20km/h以上の速度で走行し、且つ地点d〜地点eまでの間で40km/h以上の速度で走行している。従って、渋滞度設定テーブル27に基づいて、地点c〜地点dまでの間で「混雑」の渋滞度が設定され、且つ地点d〜地点eまでの間で「順調」の渋滞度が設定される。
また、リンクEの区間では地点e〜地点fまでの間で自車は40km/h以上の速度で走行し、地点f〜地点gまでの間で20km/h以上の速度で走行し、且つ地点g〜地点hまでの間で20km/h未満の速度で走行している。従って、渋滞度設定テーブル27に基づいて、地点e〜地点fまでの間で「順調」の渋滞度が設定され、地点f〜地点gまでの間で「混雑」の渋滞度が設定され、且つ地点g〜地点hまでの間で「渋滞」の渋滞度が設定される。
また、リンクFの区間では地点h〜地点iまでの間で自車は20km/h未満の速度で走行し、地点i〜地点jまでの間で20km/h以上の速度で走行し、且つ地点j〜地点kまでの間で20km/h未満の速度で走行している。従って、渋滞度設定テーブル27に基づいて、地点h〜地点iまでの間で「渋滞」の渋滞度が設定され、地点i〜地点jまでの間で「混雑」の渋滞度が設定され、且つ地点j〜地点kまでの間で「順調」の渋滞度が設定される。尚、上記S20の処理が渋滞情報作成手段の処理に相当する。
【0060】
次に、S21においてCPU41は、リンクjにおいて前記S20で作成された渋滞情報61と前記S15でVICSセンタ102から取得した渋滞情報60との間で、特に渋滞度を比較することにより交通状況(渋滞情報)の一致の度合いを示す得点Aを算出する。そして、算出した得点Aを合計(i)に加算する(S22)。
更に、S23ではリンクjにおいて前記S12で算出された移動距離Lと速度の関係と前記S15でVICSセンタ102から取得した渋滞情報60との間で、特にリンク間の速度の傾きを比較することにより交通状況(渋滞情報)の一致の度合いを示す得点Bを算出する。そして、算出した得点Bを合計(i)に加算する(S24)。
【0061】
ここで、図10は得点A及び得点Bの算出方法を示した図であり、例えば、リンクjにおける前記S20で作成された渋滞情報61の渋滞度と、前記S15でVICSセンタ102から取得した渋滞情報60の渋滞度が同一である場合には、得点Aとして10点が加算される。また、渋滞度がひとつ違いである場合(例えば「渋滞」と「混雑」、「混雑」と「順調」)には、得点Aとして5点が加算される。更に、それ以外の場合(例えば「渋滞」と「順調」)には、得点Aには加算されない。尚、一のリンク内に複数の渋滞度が設定されている場合には、最も渋滞長の長い渋滞度が当該リンクの渋滞度としてみなされる。
【0062】
一方、前記S12で作成された移動距離Lと速度の関係(図7参照)におけるリンク間の速度の傾きと、前記S15でVICSセンタ102から取得した渋滞情報60におけるリンク間の速度の傾きを比較することにより、得点Bが加算される。
ここで、移動距離Lと速度の関係(図7参照)におけるリンク間の速度の傾きは、リンク間で移動距離Lに対して速度が上昇する場合には「+1」とし、移動距離Lに対して速度が下降する場合には「−1」とし、速度が変化しない場合には「0」とする。また、VICSセンタ102から取得した渋滞情報60におけるリンク間の速度の傾きは、リンク間で渋滞度が「渋滞」から「混雑」又は「混雑」から「順調」に変化する場合には「+1」とし、渋滞度が「渋滞」から「順調」に変化する場合には「+2」とし、渋滞度が「順調」から「混雑」又は「混雑」から「渋滞」に変化する場合には「−1」とし、渋滞度が「順調」から「混雑」に変化する場合には「−2」とし、渋滞度が変化しない場合には「0」とする。そして、傾きが同一である場合(例えば「−1」と「−1」、「+1」と「+1」)には、得点Bとして10点が加算される。また、傾きがひとつ違いである場合(例えば「−1」と「−2」、「0」と「+1」)には、得点Bとして5点が加算される。更に、それ以外の場合(例えば「−1」と「+1」)には、得点Bには加算されない。
【0063】
尚、図11は、例えば図8に示す渋滞情報60をVICSセンタ102より取得し、且つ図9に示す渋滞情報61が作成された場合に合計G(i)に加算される得点の一覧を示したものである。図11に示すようにナビゲーション装置1で作成された渋滞情報61では、リンクCは「順調」の渋滞度が最も長く設定されており、リンクDは「混雑」の渋滞度が最も長く設定されており、リンクEは「順調」の渋滞度が最も長く設定されており、リンクFは「混雑」の渋滞度が最も長く設定されている。また、VICSセンタ102から取得した渋滞情報60では、リンクCは「順調」の渋滞度が最も長く設定されており、リンクDは「混雑」の渋滞度が最も長く設定されており、リンクEは「渋滞」の渋滞度が最も長く設定されており、リンクFは「順調」の渋滞度が最も長く設定されている。
従って、得点Aとしては、リンクCは10点、リンクDは10点、リンクEは0点、リンクFは5点が加算される。
【0064】
一方、図11に示すように検出した自車速度に基づく移動距離Lと速度の関係におけるリンク間の速度の傾きは、リンクCとリンクDの間は「−1」であり、リンクDとリンクEの間は「+1」であり、リンクEとリンクFの間は「−1」である。また、VICSセンタ102から取得した渋滞情報60におけるリンク間の速度の傾きは、リンクCとリンクDの間は「−1」であり、リンクDとリンクEの間は「−1」であり、リンクEとリンクFの間は「+2」である。従って、得点Bとしては、リンクCとリンクDの間は10点、リンクDとリンクEの間は0点、リンクEとリンクFの間は0点が加算される。
【0065】
続いて、S25でCPU41は道路iを構成するリンク数T分だけループB処理が終了したか否かを判定し、終了したと判定された場合にはS26へと移行する。それに対し、終了していない場合には継続してループAの処理を行う。
【0066】
また、S26では前記S22及びS24で加算されたi番目の道路iにおける得点A及び得点Bの合計G(i)に基づいて正解率S(i)を算出する。具体的には、得点A及び得点Bが満点の場合における合計点(図11の場合には70点)に対する割合が正解率(図11の場合には50%)として算出される。尚、上記S14〜S27の処理が道路比較手段の処理に相当する。
【0067】
次に、S27でCPU41は並設された道路の数N分だけループA処理が終了したか否かを判定し、終了したと判定された場合にはS28へと移行する。それに対し、終了していない場合には継続してループBの処理を行う。
【0068】
S28でCPU41は、前記S13で取得した並設された複数の道路数の内、最も正解率の高い道路を、最も交通状況の近い道路として選択する。そして、S29では前記S28で選択された道路の正解率が所定値(例えば、70%)以上であるか否かが判定される。
【0069】
その結果、道路の正解率が所定値(例えば、70%)以上であると判定された場合(S29:YES)には、前記S28で選択された道路を自車の走行する道路として特定し(S30)、S7(図5参照)へと移行する。
一方、道路の正解率が所定値未満であると判定された場合(S29:NO)には、前記S28で選択された道路は自車の走行する道路として特定するには交通状況が大きく異なり、不適当な道路であるので、自車の走行する道路として特定せず(S31)、S7(図5参照)へと移行する。尚、上記S11〜S30の処理が道路特定手段の処理に相当する。
【0070】
尚、より正確に自車の走行した道路の特定を行う為に、自車の走行速度や渋滞情報のみに基づいて判定するのではなく、他の複数の検知結果を総合的に考慮して判定しても良い。他の検知結果としては、例えば、GPS衛星からの電波を考慮したり、ビーコン受信を考慮することが可能である。また、過去に自車が走行した道路について考慮することも可能である。そして、上記した他の複数の検知結果に対しても得点を割り付け、その合計に基づいて道路を判定することによって、より精度を向上させることが可能となる。
【0071】
以上詳細に説明した通り、本実施形態に係るナビゲーション装置1では、自車の現在位置と走行速度を検出し(S2)、地図情報DB22に記憶された地図データに基づいてマッチング処理を行う際に、所定距離間隔で並設する道路があると判定された場合(S4:YES)には、VICSセンタ102から通信装置18を介して渋滞情報を取得し(S15)、取得した渋滞情報と検出した自車の走行速度に基づいて作成(S20)された渋滞情報とを比較することにより、最も交通状況が近い道路を選択し(S28)、自車の走行する道路として特定する(S30)ので、高速道路と一般道路等の異なる属性の道路が並設されており、且つ高速道路が渋滞している場合であっても自車の走行する道路を正確に特定することが可能である。また、同じ属性の道路が並設されている場合においても道路の特定が可能となる。そして、特定した道路の情報をナビゲーション装置1で利用することによって、道路が非常に短い間隔で並設されている場合や、高架上と高架下で道路が上下方向に並設されている場合等でも、より正確な経路の探索や案内を行うことが可能となる。
また、並設する道路が存在せず(S4:NO)、自車の現在位置のみに基づいて自車の走行する道路が特定可能な場合には渋滞情報に基づく道路の特定を行わないので、正確な経路の探索や案内を行いつつ制御装置の処理負担を軽減できる。
また、並設される道路があると判定された時点から車両が所定距離以上走行した場合(S5:YES)に自車の走行する道路を特定するので、道路の特定を行う為の情報が十分に揃い、道路の特定が可能である状況下において正確な道路の特定が可能となる。また、十分に走行する道路の特定ができない場合には渋滞情報に基づく道路の特定を行わないので、制御装置の処理負担を軽減できる。
また、自車の走行速度とVICSセンタ102から通信装置18を介して取得した渋滞情報とをリンク及びリンク間でそれぞれ比較することにより得点を算出し、最も交通状況が近い道路を自車の走行する道路に特定するので、道路を構成するリンクの配置及び繋がりを考慮して自車の走行する道路をより正確に特定することが可能である。
更に、渋滞情報を比較した際の交通状況の類似を示す正解率S(i)が、所定値(例えば70%)より高い道路を自車の走行する道路に特定するので、交通状況が大きく異なる不適当な道路が自車の走行する道路として特定されることを防止できる。
【0072】
尚、本発明は前記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、本実施形態ではS12で算出した移動距離Lと速度の関係に基づいて渋滞情報61を作成し(S20)、VICSセンタ102から取得した渋滞情報60と比較することによって道路の特定を行うように構成しているが、VICSセンタ102から取得した渋滞情報に基づいて並設される各道路について移動距離Lと速度の関係を作成し、S12で算出した移動距離Lと速度の関係と比較することによって交通状況の近い道路を判定し、道路の特定を行うようにしても良い。
【0073】
また、本実施形態では自車の走行速度に基づいて設定された渋滞度を比較した得点Aと、自車の走行速度と渋滞度のリンク間における速度の傾きを比較した得点Bとを合計し、正解率を算出することによって交通状況の近い道路を判定することとしていたが、得点A又は得点Bのみで正解率を算出し、交通状況の近い道路を判定することとしても良い。
【0074】
また、本実施形態では並設された道路がある場合にのみに自車の走行速度とVICSセンタ102から取得した渋滞情報とに基づいて自車の走行する道路の特定を行うように構成されているが、並設された道路がない場合でも、より正確に自車の走行する道路の特定を行う為に自車の走行速度とVICSセンタ102から取得した渋滞情報とに基づいて自車の走行する道路の特定を行うようにしても良い。
【図面の簡単な説明】
【0075】
【図1】本実施形態に係るナビゲーション装置を示したブロック図である。
【図2】本実施形態に係るナビゲーション装置を含む通信システムを示した概略構成図である。
【図3】本実施形態に係る渋滞度設定テーブルを示した図である。
【図4】VICSセンタで作成される渋滞情報の一例を示す模式図である。
【図5】本実施形態に係る道路特定処理プログラムのフローチャートである。
【図6】本実施形態に係る道路判定処理プログラムのフローチャートである。
【図7】所定の区間X〜Yまでを自車が走行した場合に、ステップ12で算出される自車の移動距離Lと速度の関係の一例を示した図である。
【図8】ステップ15でVICSセンタから取得した渋滞情報の一例を示した図である。
【図9】図7に示す速度関係で移動距離Lを自車が走行した場合において、区間X〜Yの間で並設された一の道路を構成するリンクC〜Fでナビゲーション装置が作成した渋滞情報を示す図である。
【図10】得点A及び得点Bの算出方法を示した図である。
【図11】図8に示す渋滞情報を取得し、且つ図9に示す渋滞情報が作成された場合に合計Gに加算される得点の一覧を示した図である。
【符号の説明】
【0076】
1 ナビゲーション装置
11 現在地検出処理部
12 データ記録部
13 ナビゲーション制御部
17 DVDドライブ
18 通信装置
21 車速センサ
22 地図情報DB
27 渋滞度設定テーブル
41 CPU
42 RAM
43 ROM
【特許請求の範囲】
【請求項1】
道路網を含む地図データを記憶する地図データ記憶手段と、
自車の現在位置を検出する自車位置検出手段と、
前記自車位置検出手段によって検出された自車の現在位置に基づいて前記地図データから自車の走行する道路を特定する道路特定手段と、を有する走行道路特定装置において、
道路の渋滞情報を取得する渋滞情報取得手段と、
自車の走行速度を検出する速度検出手段と、を有し、
前記道路特定手段は、前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする走行道路特定装置。
【請求項2】
前記車両が走行する道路に対して所定距離間隔で並設される道路があるか否かを判定する並設道路判定手段を有し、
前記道路特定手段は、前記並設道路判定手段によって並設される道路があると判定された場合に前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする請求項1に記載の走行道路特定装置。
【請求項3】
前記並設道路判定手段によって並設される道路があると判定された時点から前記車両が所定距離以上走行したか否かを判定する走行距離判定手段を有し、
前記道路特定手段は、前記走行距離判定手段によって所定距離以上走行したと判定された場合に前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする請求項2に記載の走行道路特定装置。
【請求項4】
前記道路特定手段は、
前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とを比較する道路比較手段を備え、
前記道路比較手段の比較結果に基づいて交通状況が所定の基準より近い道路を自車の走行する道路に特定することを特徴とする請求項1乃至請求項3のいずれかに記載の走行道路特定装置。
【請求項5】
前記渋滞情報取得手段は所定距離間隔で並設された複数本の道路の渋滞情報を取得し、
前記道路特定手段は、
前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路の渋滞情報とを比較する道路比較手段を備え、
前記道路比較手段の比較結果に基づいて前記複数本の道路の内、最も交通状況が近い道路を自車の走行する道路に特定することを特徴とする請求項1乃至請求項4のいずれかに記載の走行道路特定装置。
【請求項6】
前記道路比較手段は並設された複数本の道路について道路属性と自車の走行速度に基づいて渋滞情報を作成する渋滞情報作成手段を備え、
前記道路特定手段は前記渋滞情報作成手段によって作成された渋滞情報に対して前記渋滞情報取得手段により取得した渋滞情報が最も一致する道路を最も交通状況が近い道路とすることを特徴とする請求項5に記載の走行道路特定装置。
【請求項7】
前記渋滞情報取得手段は所定距離間隔で並設された複数本の道路を構成するリンク及びリンク間の渋滞情報を取得し、
前記道路間比較手段は、前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路を構成するリンク及びリンク間の渋滞情報とを比較することを特徴とする請求項5又は請求項6に記載の走行道路特定装置。
【請求項8】
自車の現在位置を検出する自車位置検出検出ステップと、
道路の渋滞情報を取得する渋滞情報取得ステップと、
自車の走行速度を検出する速度検出ステップと、
前記自車位置検出ステップによって検出された自車の現在位置と前記速度検出ステップによって検出された自車の走行速度と前記渋滞情報取得ステップにより取得した道路の渋滞情報とに基づいて記憶された地図データから自車の走行する道路を特定する道路特定ステップと、
を実行させる為のプログラムを記憶したコンピュータ読み取り可能な記憶媒体。
【請求項1】
道路網を含む地図データを記憶する地図データ記憶手段と、
自車の現在位置を検出する自車位置検出手段と、
前記自車位置検出手段によって検出された自車の現在位置に基づいて前記地図データから自車の走行する道路を特定する道路特定手段と、を有する走行道路特定装置において、
道路の渋滞情報を取得する渋滞情報取得手段と、
自車の走行速度を検出する速度検出手段と、を有し、
前記道路特定手段は、前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする走行道路特定装置。
【請求項2】
前記車両が走行する道路に対して所定距離間隔で並設される道路があるか否かを判定する並設道路判定手段を有し、
前記道路特定手段は、前記並設道路判定手段によって並設される道路があると判定された場合に前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする請求項1に記載の走行道路特定装置。
【請求項3】
前記並設道路判定手段によって並設される道路があると判定された時点から前記車両が所定距離以上走行したか否かを判定する走行距離判定手段を有し、
前記道路特定手段は、前記走行距離判定手段によって所定距離以上走行したと判定された場合に前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とに基づいて自車の走行する道路を特定することを特徴とする請求項2に記載の走行道路特定装置。
【請求項4】
前記道路特定手段は、
前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した道路の渋滞情報とを比較する道路比較手段を備え、
前記道路比較手段の比較結果に基づいて交通状況が所定の基準より近い道路を自車の走行する道路に特定することを特徴とする請求項1乃至請求項3のいずれかに記載の走行道路特定装置。
【請求項5】
前記渋滞情報取得手段は所定距離間隔で並設された複数本の道路の渋滞情報を取得し、
前記道路特定手段は、
前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路の渋滞情報とを比較する道路比較手段を備え、
前記道路比較手段の比較結果に基づいて前記複数本の道路の内、最も交通状況が近い道路を自車の走行する道路に特定することを特徴とする請求項1乃至請求項4のいずれかに記載の走行道路特定装置。
【請求項6】
前記道路比較手段は並設された複数本の道路について道路属性と自車の走行速度に基づいて渋滞情報を作成する渋滞情報作成手段を備え、
前記道路特定手段は前記渋滞情報作成手段によって作成された渋滞情報に対して前記渋滞情報取得手段により取得した渋滞情報が最も一致する道路を最も交通状況が近い道路とすることを特徴とする請求項5に記載の走行道路特定装置。
【請求項7】
前記渋滞情報取得手段は所定距離間隔で並設された複数本の道路を構成するリンク及びリンク間の渋滞情報を取得し、
前記道路間比較手段は、前記速度検出手段によって検出された自車の走行速度と前記渋滞情報取得手段により取得した複数本の道路を構成するリンク及びリンク間の渋滞情報とを比較することを特徴とする請求項5又は請求項6に記載の走行道路特定装置。
【請求項8】
自車の現在位置を検出する自車位置検出検出ステップと、
道路の渋滞情報を取得する渋滞情報取得ステップと、
自車の走行速度を検出する速度検出ステップと、
前記自車位置検出ステップによって検出された自車の現在位置と前記速度検出ステップによって検出された自車の走行速度と前記渋滞情報取得ステップにより取得した道路の渋滞情報とに基づいて記憶された地図データから自車の走行する道路を特定する道路特定ステップと、
を実行させる為のプログラムを記憶したコンピュータ読み取り可能な記憶媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2007−232514(P2007−232514A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−53308(P2006−53308)
【出願日】平成18年2月28日(2006.2.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年2月28日(2006.2.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]