
超伝導磁気測定装置の制御方法
【課題】被検体の首や腰を前に曲げなくても、頚部や腰部で発生する微弱な磁気を好適に測定することが出来る超伝導磁気測定装置の制御方法を提供する。
【解決手段】センサ筒10を水平にしてセンサ筒の先端面を背後から生体に近づけ、生体の一部にセンサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)の一部を当接させ、その当接した部分を回転中心にしてセンサ筒の先端面を回転させて、センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させる。
【解決手段】センサ筒10を水平にしてセンサ筒の先端面を背後から生体に近づけ、生体の一部にセンサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)の一部を当接させ、その当接した部分を回転中心にしてセンサ筒の先端面を回転させて、センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、超伝導磁気測定装置の制御方法に関し、さらに詳しくは、頚部や腰部で発生する微弱な磁気を好適に測定することが出来る超伝導磁気測定装置の制御方法に関する。
【背景技術】
【0002】
従来、複数の超伝導磁気センサをy方向に並べたセンサ列を、複数列、隣接するセンサ列の超伝導磁気センサに対してy方向位置をずらせてx方向に並べたセンサアレイを、センサ筒の先端部の内面に設置してなる超伝導磁気測定装置が知られている(例えば、特許文献1参照。)。
【0003】
この超伝導磁気測定装置では、センサ筒の先端面を生体に当てて、センサ筒の内部に収容した磁気センサで生体磁気を測定することを、生体に対してセンサ筒を移動させながら繰り返す。
【特許文献1】特開2005−337862号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来の超伝導磁気測定装置では、センサ筒の先端部が平面壁であったため、被検体の首をやや前に曲げて頚部を真っ直ぐに伸ばした状態にしてセンサ筒の先端部を被検体の頚部に密着させ、頚部で発生する微弱な磁気を測定していた。また、同様に、被検体の腰をやや前に曲げて腰部を真っ直ぐに伸ばした状態にしてセンサ筒の先端部を被検体の腰部に密着させ、腰部で発生する微弱な磁気を測定していた。
しかし、例えば高齢者は加齢により脊椎の可動性(動かすことができる範囲)が減少し、首や腰を前に曲げることができず、被検体の頚部や腰部が自然に湾曲した状態のままであるため、センサ筒の先端部の中央が被検体の頚部や腰部から離れることになり、うまく測定できなくなる問題点があった。また、首や背を前に無理に曲げると、筋肉の活動による磁場がノイズ源になり、測定が阻害される問題点があった。
【0005】
また、上記従来の生体磁気測定装置では、センサ筒がプラスチック製で、その先端面が滑らかな面であった。
しかし、このような滑らかな面を例えば被検体の皮膚に密着させると、皮膚の湿り具合によってはセンサ筒の先端面が皮膚にくっつき、センサ筒を滑らかに移動させることが困難になる問題点があった。
【0006】
そこで、本発明の目的は、被検体の首を前に曲げなくても、頚部や腰部で発生する微弱な磁気を好適に測定することが出来る超伝導磁気測定装置の制御方法を提供することにある。
【課題を解決するための手段】
【0007】
第1の観点では、本発明は、複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒を水平にして該センサ筒の先端面を背後から生体に近づけ、生体の一部に前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)の一部を当接させ、その当接した部分を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させることを特徴とする超伝導磁気測定装置の制御方法を提供する。
上記第1の観点における超伝導磁気測定装置では、センサ筒の先端面を湾曲壁にしているため、被検体の首を前に曲げないで頚部が自然に湾曲した状態であっても、センサ筒の先端面を被検体の頚部に必要な程度密着させることが出来る。また、被検体の腰を前に曲げないで腰部が自然に湾曲した状態であっても、センサ筒の先端面を被検体の腰部に必要な程度密着させることが出来る。すなわち、被検体の首や腰を前に曲げないで、自然な姿勢でも、脊髄および脊髄神経で発生する微弱な磁気を好適に測定することが出来る。
【0008】
また、前記先端面は、y方向については中央が上下の端より飛び出すように滑らかに湾曲しているので、被検体の首や腰を前に曲げないで頚部や腰部が自然に湾曲した状態であっても、y方向についてセンサ筒の先端面を被検体の頚部や腰部に密着させることが出来る。
なお、前記先端面がx方向には湾曲していないと、被検体の頚部や腰部に引っ掛かることなく、x方向にセンサ筒を移動させることが出来る。
【0009】
例えば、前記センサ筒は、y方向幅5cm以上20cm以下、x方向幅5cm以上20cm以下の角筒であり、前記先端面は、y方向については中央が上下の端より0.5cm以上4cm以下飛び出すように滑らかに湾曲している。
【0010】
例えば、前記センサ筒は、y方向幅約145mm、前記先端面は、y方向については中央が上下の端より0.5cm以上3cm以下飛び出すように滑らかに湾曲している。
【0011】
なお、前記先端面がx方向には中央が上下の端より引っ込むように滑らかに湾曲していると、x方向についてもセンサ筒の先端面を被検体の頚部や腰部に密着させることが出来る。
【0012】
また、X線を透過しにくく且つ非磁性の材料のマーカーを前記センサ筒の先端部に視認可能に具備すれば、センサ筒の先端部をx方向にX線撮影して得たX線画像から超伝導磁気センサに対するマーカーの相対位置を把握しておき、センサ筒の先端面を被検体の首や腰に当てる際にマーカーを目安にしてセンサ筒の先端面を被検体の首や腰に位置決めすることにより、被検体の首や腰に対する超伝導磁気センサの位置を適正に設定することが出来る。なお、非磁性材料としたのは、微弱な磁気測定の邪魔にならないようにするためである。
【0013】
また、前記センサ筒の先端部を含む空間をx方向にX線撮影するX線撮影手段を具備すれば、センサ筒の先端面を被検体の首や腰に当ててX線撮影したときに、被検体の脊椎とセンサ筒の先端部とがX線画像に写るから、被検体の脊椎とy方向に並ぶ各超伝導磁気センサの位置関係が判る。従って、各超伝導磁気センサの信号を比較することで、被検体の脊髄および脊髄神経のどの部分に異常があるのかを判断可能になる。例えば、第4頚椎の近傍の超伝導磁気センサの信号が弱ければ、第4頸椎高位の脊髄や脊髄神経に異常があると判断することが出来る。
【0014】
前記第1の観点における超伝導磁気測定装置において、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備しているので、センサ筒の3次元的移動と仰角調整とを好適に行うことが出来る。
【0015】
前記第1の観点による超伝導磁気測定装置の制御方法では、センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)が被検体を擦らないので、被検体に不快感を与えることを回避することが出来る。
【0016】
第2の観点では、本発明は、複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させ、前記センサ筒の先端面の湾曲の曲率中心を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面を生体の湾曲に沿って移動させることを特徴とする超伝導磁気測定装置の制御方法を提供する。
上記第2の観点による超伝導磁気測定装置の制御方法では、センサ筒の先端面を測定対象部位の曲面の沿わせて移動させることが出来る。
【0017】
第3の観点では、本発明は、前記第1または第2の観点による超伝導磁気測定装置の制御方法において、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)と前記生体の間に、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)との間で滑りを生じる裏面および前記生体との間で滑りを生じない表面を有するシートを挟むことを特徴とする超伝導磁気測定装置の制御方法を提供する。
上記第3の観点による超伝導磁気測定装置の制御方法では、センサ筒(10)の先端面と生体(H)の間にシート(21)を挟む。このシート(21)の裏面(21b)はセンサ筒(10)の先端面との間で滑りを生じ、表面(21a)は生体(H)との間で滑りを生じない。従って、生体(H)とシート(21)とがくっついても、センサ筒(10)の先端面はシート(21)の裏面(21b)にくっつかずに滑らかに移動しうることとなる。
【発明の効果】
【0018】
本発明の超伝導磁気測定装置の制御方法によれば、被検体の脊髄および脊髄神経で発生する微弱な磁気を好適に測定することが出来る。
【図面の簡単な説明】
【0019】
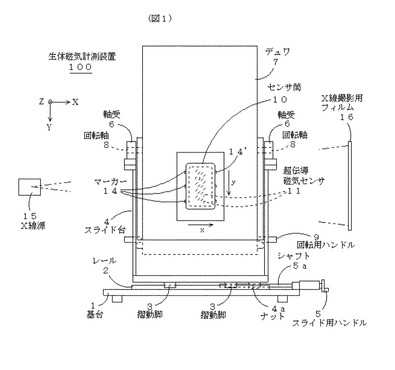
【図1】実施例1に係る超伝導磁気測定装置の正面図である。
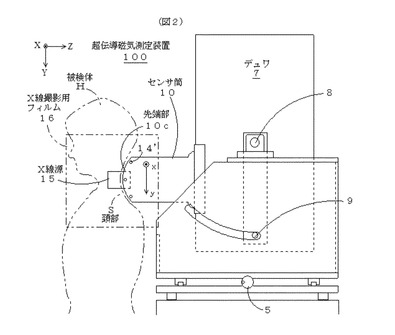
【図2】実施例1に係る超伝導磁気測定装置の右側面図である。
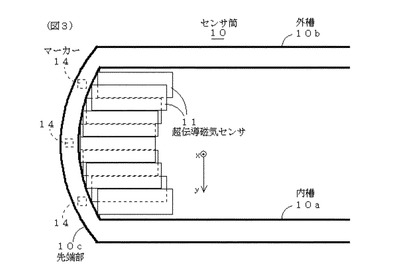
【図3】実施例1に係る超伝導磁気測定装置のセンサ筒の断面図である。
【図4】超伝導磁気センサの一例を示す斜視図である。
【図5】実施例1に係る超伝導磁気測定装置における複数の超伝導磁気センサの配列を示す模式図である。
【図6】実施例1に係る超伝導磁気測定装置における測定点の分布を示す模式図である。
【図7】実施例1に係る超伝導磁気測定装置におけるX線撮影画像を示す模式図である。
【図8】実施例2に係る超伝導磁気測定装置のセンサ筒の断面図である。
【図9】実施例3に係る生体磁気測定装置用センサ筒カバーを示す分解斜視図である。
【図10】実施例3に係る生体磁気測定装置用センサ筒カバーを示す斜視図である。
【図11】実施例3に係る生体磁気測定装置用センサ筒カバーを被せた生体磁気測定装置の右側面図である。
【図12】実施例3に係る生体磁気測定装置用センサ筒カバーを被せたセンサ筒の断面図である。
【図13】実施例4に係る生体磁気測定装置用センサ筒カバーを被せたセンサ筒の断面図である。
【図14】実施例5に係る生体磁気測定装置用センサ筒カバーを被せた生体磁気測定装置の右側面図である。
【図15】実施例6に係るシートを示す斜視図である。
【図16】実施例7に係る生体磁気測定装置を示す正面図である。
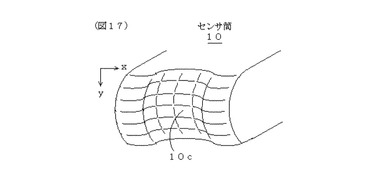
【図17】実施例9に係る生体磁気測定装置を示す正面図である。
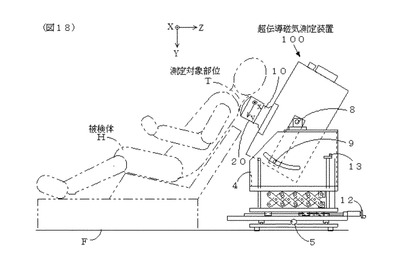
【図18】実施例10に係る生体磁気測定装置を示す右側面図である。
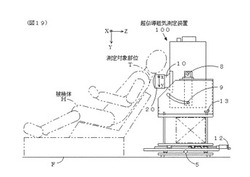
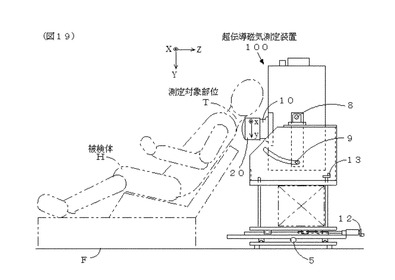
【図19】実施例10に係る生体磁気測定装置のセンサ筒を被検体に当てる操作(前半)の説明図である。
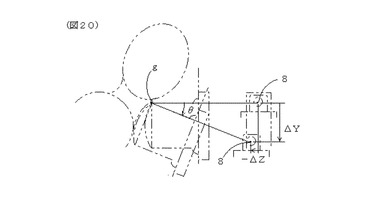
【図20】実施例10に係る生体磁気測定装置のセンサ筒を被検体に当てる操作(後半)の説明図である。
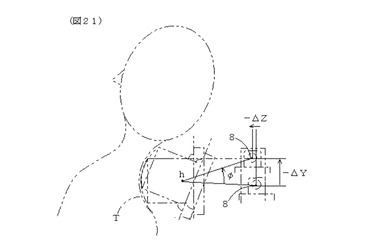
【図21】実施例11に係る生体磁気測定装置のセンサ筒を被検体に沿って移動する操作の説明図である。
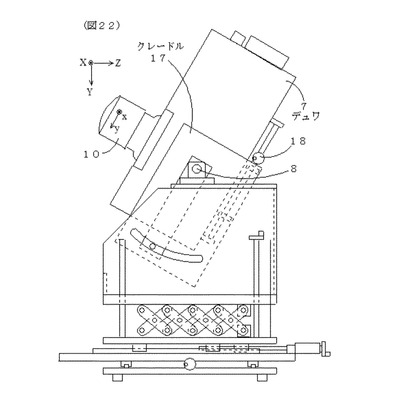
【図22】実施例12に係る生体磁気測定装置の右側面図である。
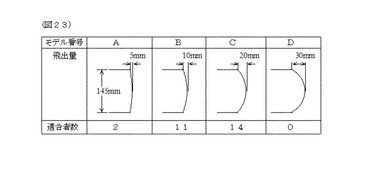
【図23】試験例に用いたセンサ筒の説明図である。
【符号の説明】
【0020】
4a ナット
5a シャフト
10 センサ筒
10c 先端部
11 超伝導磁気センサ
100 超伝導磁気測定装置
【発明を実施するための最良の形態】
【0021】
以下、図に示す実施の形態によりこの発明をさらに詳細に説明する。なお、これによりこの発明が限定されるものではない。
【0022】
−実施例1−
図1は、実施例1に係る超伝導磁気測定装置100の正面図である。
この超伝導磁気測定装置100は、上面にレール2を設置された基台1と、レール2上を摺動しうる摺動脚3を持つスライド台4と、スライド台4を左右方向にスライドさせるために操作者が操作するスライド用ハンドル5と、スライド台4の上面に設置された軸受6と、回転軸8により軸受6で軸支され且つ液体ヘリウムの如き冷媒を保持するデュア7と、デュア7から突出したセンサ筒10と、センサ筒10の傾きを変えるために操作者が操作する回転用ハンドル9と、センサ筒10の先端部の内面にy方向およびx方向に配設された複数の超伝導磁気センサ11とを具備している。
なお、3次元空間のX方向を左右方向とし、Y方向を上下方向とし、Z方向を前後方向とする。センサ筒10を水平にしたとき、y方向はY方向に一致する。x方向は常にX方向に一致する。
【0023】
センサ筒10の先端部の左側面および右側面には、X線を透過しにくく且つ非磁性の材料のマーカー14,14’を具備している。マーカー14,14’は、例えばチタン製や真鍮製のネジである。左側面のマーカー14は角形であり、右側面のマーカー14’は丸形である。
【0024】
また、超伝導磁気測定装置100は、センサ筒10の先端面を含む空間をx方向にX線撮影するためのX線源15およびX線撮影用フィルム16を備えている。
【0025】
図2は、超伝導磁気測定装置100の右側面図である。
センサ筒10は、y方向幅5cm以上20cm以下、x方向幅5cm以上20cm以下の角筒である。先端部10cは、y方向については中央が上下の端より0.5cm以上4cm以下飛び出すように滑らかに湾曲し、x方向には湾曲していない。好ましい数値例では、センサ筒10のy方向幅約145mm、先端面は、y方向については中央が上下の端より0.5cm以上3cm以下飛び出すように滑らかに湾曲し、x方向には湾曲していないものである。
【0026】
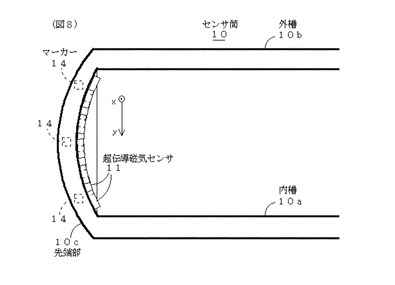
図3は、センサ筒10の先端部10cの内部を示す断面図である。
センサ筒10は、内槽10aおよび外槽10bからなる。内槽10aの内面に、複数の超伝導磁気センサ11が配設されている。
【0027】
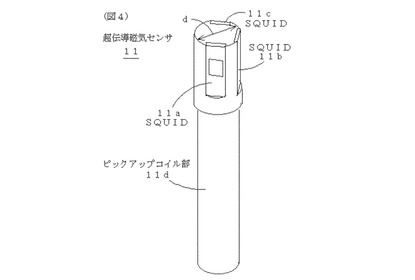
図4は、超伝導磁気センサ11を示す斜視図である。
超伝導磁気センサ11は、ガラスエポキシ製の円柱状ブロックにSQUID11a,11b,11cを配置し、その円柱状ブロックに連なる円柱状ブロックにピックアップコイル部11dを形成した、直径d(例えば20mm)の円柱状である。
【0028】
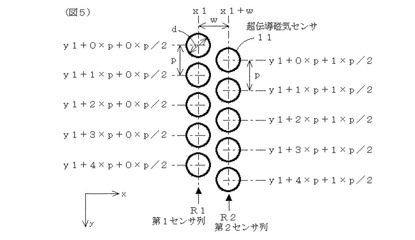
図5は、複数の超伝導磁気センサ11の配置を示す模式図である。
第1センサ列R1は、5個の超伝導磁気センサ11をy方向にピッチp(例えば20mm)で一列に並べたものである。
第1センサ列R1からx方向にピッチw(例えば20mm)だけ離れた第2センサ列R2は、5個の超伝導磁気センサ11をy方向にピッチpで一列に並べ且つ第1センサ列R1の超伝導磁気センサ11に対してp/2だけy方向位置をずらせたものである。
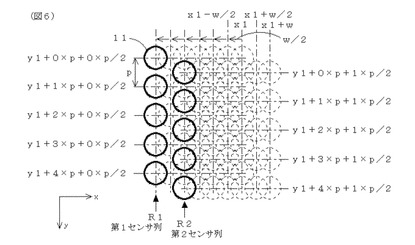
【0029】
図6は、1回目の測定を行った後、x方向にw/2だけスライド台4をスライドして2回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして3回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして4回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして5回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして6回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして7回目の測定を行った場合の測定点の密度を示している。すなわち、y方向のスライド範囲の両端では、測定点のy方向のピッチは超伝導磁気センサ11のy方向のピッチpと等しいが、y方向のスライド範囲の中央では、測定点のy方向のピッチは超伝導磁気センサ11のy方向のピッチpの1/2になっている。
また、測定点のx方向のピッチは、センサ列のピッチwの1/2になっている。
【0030】
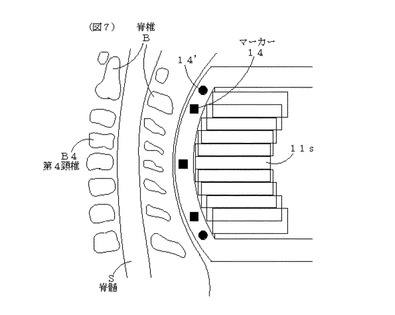
図7は、図2の状態でX線撮影した画像を示す模式図である。
このようなX線画像から超伝導磁気センサ11に対するマーカー14,14’のy方向の相対位置を把握することが出来る。そこで、センサ筒10の先端面を被検体Hの首や腰に当てる際にマーカー14,14’を目安にしてセンサ筒10の先端面を被検体Hの首や腰に位置決めすれば、被検体Hの首や腰に対する超伝導磁気センサ11の位置を適正に設定することが出来る。
【0031】
また、被検体Hの頚部の脊椎と各超伝導磁気センサ11の位置関係は一定であるから、頚部の脊椎と各超伝導磁気センサ11の相対位置を把握することが出来る。そこで、例えばy方向の中央に位置する超伝導磁気センサ11sで得られた信号が異常であれば、その超伝導磁気センサ11sに近い第4頸椎S4高位の脊髄や脊髄神経に異常があると判断できる。そして、第4頚椎S4に異常があると判断できれば、第4頚椎S4の近傍を切開して手術すれば足り、従来のように第2頸椎から第7頸椎まで広範囲に切開する必要がなくなり、患者の負担を軽減できる。
【0032】
実施例1の超伝導磁気測定装置100によれば、複数の超伝導磁気センサ11を配列可能な密度よりも高い密度で測定点を設定可能になる。また、センサアレイを移動可能にするのはx方向だけなので、構成の複雑化を抑制できると共に測定回数の増加も抑制することが出来る。そして、被検体Hの首を前に曲げないで頚部が自然に湾曲した状態であっても、y方向についてセンサ筒10の先端部10cを被検体Hの頚部に密着させることが出来る。また、x方向についてはセンサ筒10の先端部10cが湾曲していないので、被検体Hの頚部に引っ掛かることなく、x方向にセンサ筒10を移動させることが出来る。
同様に、被検体Hの腰を前に曲げないで腰部が自然に湾曲した状態であっても、y方向についてセンサ筒10の先端部10cを被検体Hの腰部に密着させることが出来る。
【0033】
−実施例2−
図8に示すように、円筒型の超伝導磁気センサ11(図4)の代わりに、平面型の超伝導磁気センサ11を用いてもよい。
【0034】
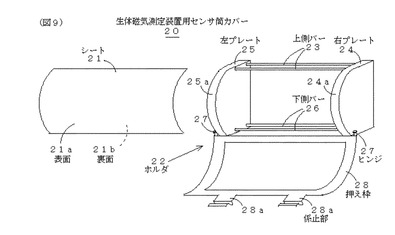
−実施例3−
図9は、実施例3に係る生体磁気測定装置用センサ筒カバー20を示す分解斜視図である。
この生体磁気測定装置用センサ筒カバー20は、シート21と、ホルダ22とからなる。
【0035】
シート21は、プラスチックシートであり、その表面21aおよび裏面21bは平滑面である。
【0036】
ホルダ22は、上側バー23と、上側バー23の右端に取り付けられた右プレート24と、上側バー23の左端に取り付けられた左プレート25と、右プレート24および左プレート25を下側で連結する下側バー26と、右プレート24および左プレート25にヒンジ27で軸止された押え枠28とを具備している。
【0037】
上側バー23と下側バー26の間の隙間は、生体磁気測定装置100のセンサ筒10の高さより数mmだけ大きくしてある。
右プレート24と左プレート25の間の隙間は、生体磁気測定装置100のセンサ筒10の横幅より2cm〜8cmだけ大きくしてある。
右プレート24と左プレート25の奥行きは、生体磁気測定装置100のセンサ筒10の長さより数cmだけ短くしてある。
右プレート24の前面24aおよび左プレート25の前面25aの形状は、生体磁気測定装置100のセンサ筒10の先端面の形状に適合する形状になっている。
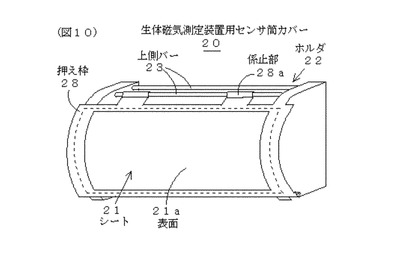
【0038】
図10に示すように、右プレート24の前面24aおよび左プレート25の前面25aと押え枠28の間にシート21を挟んで、上側バー23に係止部28aを係止すると、シート21の形状は、生体磁気測定装置100のセンサ筒10の先端面の形状に適合する形状になる。
【0039】
図2に示すようにセンサ筒10の先端面を被検体Hの皮膚に密着させると、皮膚の湿り具合によってはセンサ筒10の先端面が皮膚にくっつき、センサ筒10を滑らかに移動させることが困難になることがある。
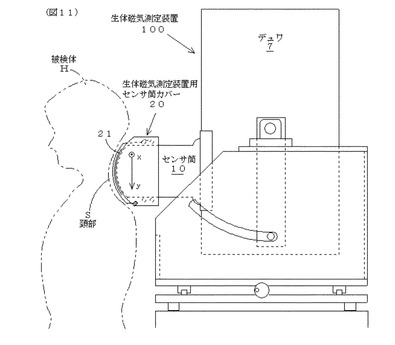
【0040】
そこで、図11に示すように、センサ筒10の先端部10cに生体磁気測定装置用センサ筒カバー20を被せる。
このようにすると、センサ筒10の先端面と被検体Hの間にシート21が挟まれることになる。このシート21の裏面21bは平滑面であるから、同じく平滑面であるセンサ筒10の先端面との間で滑りを生じる。一方、シート21の表面21aも平滑面であるから、被検体Hの皮膚の湿り具体によって皮膚にくっつき、滑りを生じない。従って、センサ筒10の先端面はシート21の裏面21bに接しながら滑らかにx方向(=水平方向)に移動しうる。但し、ホルダ22が垂直方向に移動しないから、センサ筒10の先端面はy方向(=垂直方向)には移動しない。
【0041】
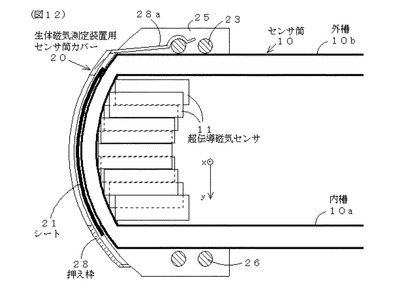
図12は、生体磁気測定装置用センサ筒カバー20を被せたセンサ筒10の先端部10cの断面図である。
センサ筒10は、内槽10aおよび外槽10bからなる。内槽10aの内面に、複数の超伝導磁気センサ11が配設されている。
【0042】
実施例3の生体磁気測定方法、生体磁気測定装置用センサ筒カバー20、シート21および生体磁気測定装置100によれば、センサ筒10を滑らかにx方向(=水平方向)に移動できると共にy方向(=垂直方向)には移動しないようにすることが出来る。
【0043】
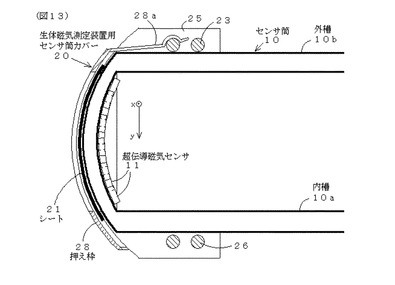
−実施例4−
図13に示すように、円筒型の超伝導磁気センサ11(図4)の代わりに、平面型の超伝導磁気センサ11を用いてもよい。
【0044】
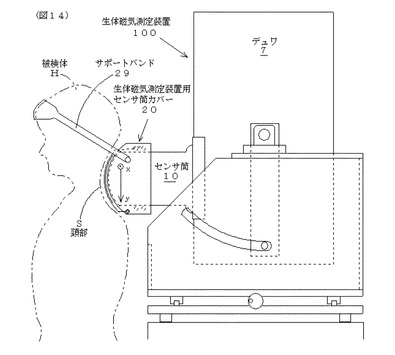
−実施例5−
図14に示すように、ゴム製のサポートバンド29をホルダ22に取り付け、サポートバンド29によりホルダ22を被検体Hに一体的に装着するようにしてもよい。
ホルダ22を被検体Hに一体的に装着することにより、ホルダ22を介して被検体Hとセンサ筒10の位置関係を安定化できる。
【0045】
−実施例6−
図15に示すように、シート21の裏面21bに多数の水平方向の線状凹凸を設けてもよい。
シート21の裏面21bに多数の水平方向の線状凹凸を設けることにより、センサ筒10の先端面がシート21に対して垂直方向に滑りにくくなる。つまり、センサ筒10の先端面を水平方向にのみ滑らかに移動することが出来る。
【0046】
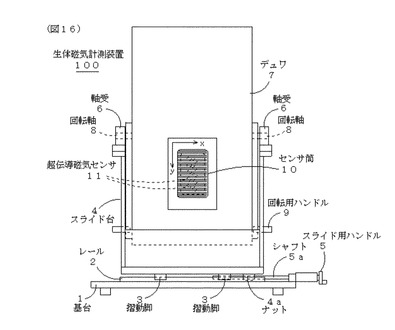
−実施例7−
図16に示すように、生体磁気測定装置100のセンサ筒10の先端面に多数の水平方向の線状凹凸を設けてもよい。
センサ筒10の先端面に多数の水平方向の線状凹凸を設けることにより、センサ筒10の先端面がシート21に対して垂直方向に滑りにくくなる。つまり、センサ筒10の先端面を水平方向にのみ滑らかに移動することが出来る。
【0047】
−実施例8−
ねじ止めや面ファスナーを用いて、シート21をホルダ22に保持してもよい。
【0048】
−実施例9−
図17に示すように、センサ筒10の先端部10cを、y方向については中央が上下の端より飛び出すように滑らかに湾曲し且つx方向には中央が上下の端より引っ込むように滑らかに湾曲しているサドル形の湾曲面にしてもよい。
実施例9によれば、被検体の首や腰を前に曲げないで頚部や腰部が自然に湾曲した状態であっても、y方向についてセンサ筒10の先端部10cを被検体の頚部や腰部に密着させることが出来る。さらに、x方向についてもセンサ筒10の先端部10cを被検体の頚部や腰部に密着させることが出来る。
【0049】
−実施例10−
図18に示すように、スライド台4を前後方向(Z方向)にスライドさせるために操作者が操作するスライド用ハンドル12と、スライド台4を上下方向(Y方向)にスライドさせるために操作者が操作するスライド用ハンドル13とを設けるのが好ましい。
【0050】
センサ筒10の先端面を測定対象部位Tに適正に当てるために次のように操作する。
(1)回転用ハンドル9を操作してセンサ筒10を水平にする。
(2)図19に示すように、スライド用ハンドル12およびスライド用ハンドル13を操作してセンサ筒カバー20の先端面(センサ筒カバー20をしない場合はセンサ筒10の先端面)の上辺を測定対象部位Tの上端部分に当てる。
(3)図20に示すように、測定対象部位Tの上端部分に当たっている部分を回転中心gにしてセンサ筒10の角度θを変え、センサ筒カバー20の先端面(センサ筒カバー20をしない場合はセンサ筒10の先端面)を全体的に測定対象部位Tに当てる。具体的には、回転用ハンドル9を操作してセンサ筒10の角度θを変え、それと同時にスライド用ハンドル12を操作してスライド台4を−ΔZだけ前後方向に移動し且つスライド用ハンドル13を操作してスライド台4をΔYだけ上下方向に移動する。センサ筒10を水平にした状態で回転軸8とセンサ筒10の先端面の上辺(=回転中心g)が同じ高さになるものとし、回転軸8とセンサ筒10の先端面の上辺(=回転中心g)の距離をZgとするとき、次式の関係がある。
ΔY=2×Zg×sin(θ/2)×cos(θ/2)
ΔZ=2×Zg×sin(θ/2)×sin(θ/2)
【0051】
実施例10によれば、センサ筒カバー20の先端面(センサ筒カバー20をしない場合はセンサ筒10の先端面)が被検体を擦らないので、被検体に不快感を与えることを回避することが出来る。
【0052】
−実施例11−
センサ筒10のy方向の幅が測定対象部位Tの長さよりも短い場合は、実施例10のようにしてセンサ筒10の先端面を測定対象部位Tに当てた後、次のように操作する。
(4)図21に示すように、センサ筒10の先端面の湾曲中心(円弧状ならその円弧を含む円の中心)を回転中心hにしてセンサ筒10の角度φを変え、センサ筒10の先端面を測定対象部位Tに沿って移動させる。具体的には、回転用ハンドル9を操作してセンサ筒10の角度φを変え、それと同時にスライド用ハンドル12を操作してスライド台4を−ΔZだけ前後方向に移動し且つスライド用ハンドル13を操作してスライド台4を−ΔYだけ上下方向に移動する。図21では角度φだけ回転させてセンサ筒10が水平になった状態を示しているが、回転軸8と回転中心hの距離をZhとするとき、次式の関係がある。
ΔY=2×Zh×sin(φ/2)×cos(φ/2)
ΔZ=2×Zh×sin(φ/2)×sin(φ/2)
【0053】
実施例11によれば、センサ筒10の先端面を測定対象部位Tの曲面の沿わせて移動させることが出来る。
【0054】
−実施例12−
図22に示すように、回転軸8でクレードル17を回転可能に支持し、そのクレードル17でy方向に移動可能にデュワ7を支持するようにしてもよい。
操作者がスライド用ハンドル18を操作すると、センサ筒10の先端面をy方向に移動することが出来る。
【0055】
−試験例−
図23に示すように、y方向の幅が145mm、湾曲が円弧状であり、飛出量(y方向について中央が上下の端より飛び出している量)が5mm、10mm、20mm、30mmのモデルA、B、C、Dを用意した。
頚椎疾患のために手術する予定の27名の患者さんの協力を得て、モデルA、B、C、Dと頚部の適合性を試験した。
x方向にX線撮影すると、超伝導磁気センサ11と患者の脊椎が写るので、その画像上で超伝導磁気センサ11から脊髄までの最短距離を計測した。そして、その最短距離から推定される磁界強度を算出し、その磁界強度が最大になるモデルを最適合モデルと判定した。
結果は、モデルAに対する最適合者数「2」、モデルBに対する最適合者数「11」、モデルCに対する最適合者数「14」、モデルCに対する最適合者数「0」であった。従って、頚部の測定に関しては、飛出量を5mm以上30mm以下とするのが好ましいことが判った。
【産業上の利用可能性】
【0056】
人の脊髄および脊髄神経で発生する微弱な磁気を測定する装置として利用することが出来る。
【技術分野】
【0001】
本発明は、超伝導磁気測定装置の制御方法に関し、さらに詳しくは、頚部や腰部で発生する微弱な磁気を好適に測定することが出来る超伝導磁気測定装置の制御方法に関する。
【背景技術】
【0002】
従来、複数の超伝導磁気センサをy方向に並べたセンサ列を、複数列、隣接するセンサ列の超伝導磁気センサに対してy方向位置をずらせてx方向に並べたセンサアレイを、センサ筒の先端部の内面に設置してなる超伝導磁気測定装置が知られている(例えば、特許文献1参照。)。
【0003】
この超伝導磁気測定装置では、センサ筒の先端面を生体に当てて、センサ筒の内部に収容した磁気センサで生体磁気を測定することを、生体に対してセンサ筒を移動させながら繰り返す。
【特許文献1】特開2005−337862号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来の超伝導磁気測定装置では、センサ筒の先端部が平面壁であったため、被検体の首をやや前に曲げて頚部を真っ直ぐに伸ばした状態にしてセンサ筒の先端部を被検体の頚部に密着させ、頚部で発生する微弱な磁気を測定していた。また、同様に、被検体の腰をやや前に曲げて腰部を真っ直ぐに伸ばした状態にしてセンサ筒の先端部を被検体の腰部に密着させ、腰部で発生する微弱な磁気を測定していた。
しかし、例えば高齢者は加齢により脊椎の可動性(動かすことができる範囲)が減少し、首や腰を前に曲げることができず、被検体の頚部や腰部が自然に湾曲した状態のままであるため、センサ筒の先端部の中央が被検体の頚部や腰部から離れることになり、うまく測定できなくなる問題点があった。また、首や背を前に無理に曲げると、筋肉の活動による磁場がノイズ源になり、測定が阻害される問題点があった。
【0005】
また、上記従来の生体磁気測定装置では、センサ筒がプラスチック製で、その先端面が滑らかな面であった。
しかし、このような滑らかな面を例えば被検体の皮膚に密着させると、皮膚の湿り具合によってはセンサ筒の先端面が皮膚にくっつき、センサ筒を滑らかに移動させることが困難になる問題点があった。
【0006】
そこで、本発明の目的は、被検体の首を前に曲げなくても、頚部や腰部で発生する微弱な磁気を好適に測定することが出来る超伝導磁気測定装置の制御方法を提供することにある。
【課題を解決するための手段】
【0007】
第1の観点では、本発明は、複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒を水平にして該センサ筒の先端面を背後から生体に近づけ、生体の一部に前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)の一部を当接させ、その当接した部分を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させることを特徴とする超伝導磁気測定装置の制御方法を提供する。
上記第1の観点における超伝導磁気測定装置では、センサ筒の先端面を湾曲壁にしているため、被検体の首を前に曲げないで頚部が自然に湾曲した状態であっても、センサ筒の先端面を被検体の頚部に必要な程度密着させることが出来る。また、被検体の腰を前に曲げないで腰部が自然に湾曲した状態であっても、センサ筒の先端面を被検体の腰部に必要な程度密着させることが出来る。すなわち、被検体の首や腰を前に曲げないで、自然な姿勢でも、脊髄および脊髄神経で発生する微弱な磁気を好適に測定することが出来る。
【0008】
また、前記先端面は、y方向については中央が上下の端より飛び出すように滑らかに湾曲しているので、被検体の首や腰を前に曲げないで頚部や腰部が自然に湾曲した状態であっても、y方向についてセンサ筒の先端面を被検体の頚部や腰部に密着させることが出来る。
なお、前記先端面がx方向には湾曲していないと、被検体の頚部や腰部に引っ掛かることなく、x方向にセンサ筒を移動させることが出来る。
【0009】
例えば、前記センサ筒は、y方向幅5cm以上20cm以下、x方向幅5cm以上20cm以下の角筒であり、前記先端面は、y方向については中央が上下の端より0.5cm以上4cm以下飛び出すように滑らかに湾曲している。
【0010】
例えば、前記センサ筒は、y方向幅約145mm、前記先端面は、y方向については中央が上下の端より0.5cm以上3cm以下飛び出すように滑らかに湾曲している。
【0011】
なお、前記先端面がx方向には中央が上下の端より引っ込むように滑らかに湾曲していると、x方向についてもセンサ筒の先端面を被検体の頚部や腰部に密着させることが出来る。
【0012】
また、X線を透過しにくく且つ非磁性の材料のマーカーを前記センサ筒の先端部に視認可能に具備すれば、センサ筒の先端部をx方向にX線撮影して得たX線画像から超伝導磁気センサに対するマーカーの相対位置を把握しておき、センサ筒の先端面を被検体の首や腰に当てる際にマーカーを目安にしてセンサ筒の先端面を被検体の首や腰に位置決めすることにより、被検体の首や腰に対する超伝導磁気センサの位置を適正に設定することが出来る。なお、非磁性材料としたのは、微弱な磁気測定の邪魔にならないようにするためである。
【0013】
また、前記センサ筒の先端部を含む空間をx方向にX線撮影するX線撮影手段を具備すれば、センサ筒の先端面を被検体の首や腰に当ててX線撮影したときに、被検体の脊椎とセンサ筒の先端部とがX線画像に写るから、被検体の脊椎とy方向に並ぶ各超伝導磁気センサの位置関係が判る。従って、各超伝導磁気センサの信号を比較することで、被検体の脊髄および脊髄神経のどの部分に異常があるのかを判断可能になる。例えば、第4頚椎の近傍の超伝導磁気センサの信号が弱ければ、第4頸椎高位の脊髄や脊髄神経に異常があると判断することが出来る。
【0014】
前記第1の観点における超伝導磁気測定装置において、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備しているので、センサ筒の3次元的移動と仰角調整とを好適に行うことが出来る。
【0015】
前記第1の観点による超伝導磁気測定装置の制御方法では、センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)が被検体を擦らないので、被検体に不快感を与えることを回避することが出来る。
【0016】
第2の観点では、本発明は、複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させ、前記センサ筒の先端面の湾曲の曲率中心を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面を生体の湾曲に沿って移動させることを特徴とする超伝導磁気測定装置の制御方法を提供する。
上記第2の観点による超伝導磁気測定装置の制御方法では、センサ筒の先端面を測定対象部位の曲面の沿わせて移動させることが出来る。
【0017】
第3の観点では、本発明は、前記第1または第2の観点による超伝導磁気測定装置の制御方法において、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)と前記生体の間に、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)との間で滑りを生じる裏面および前記生体との間で滑りを生じない表面を有するシートを挟むことを特徴とする超伝導磁気測定装置の制御方法を提供する。
上記第3の観点による超伝導磁気測定装置の制御方法では、センサ筒(10)の先端面と生体(H)の間にシート(21)を挟む。このシート(21)の裏面(21b)はセンサ筒(10)の先端面との間で滑りを生じ、表面(21a)は生体(H)との間で滑りを生じない。従って、生体(H)とシート(21)とがくっついても、センサ筒(10)の先端面はシート(21)の裏面(21b)にくっつかずに滑らかに移動しうることとなる。
【発明の効果】
【0018】
本発明の超伝導磁気測定装置の制御方法によれば、被検体の脊髄および脊髄神経で発生する微弱な磁気を好適に測定することが出来る。
【図面の簡単な説明】
【0019】
【図1】実施例1に係る超伝導磁気測定装置の正面図である。
【図2】実施例1に係る超伝導磁気測定装置の右側面図である。
【図3】実施例1に係る超伝導磁気測定装置のセンサ筒の断面図である。
【図4】超伝導磁気センサの一例を示す斜視図である。
【図5】実施例1に係る超伝導磁気測定装置における複数の超伝導磁気センサの配列を示す模式図である。
【図6】実施例1に係る超伝導磁気測定装置における測定点の分布を示す模式図である。
【図7】実施例1に係る超伝導磁気測定装置におけるX線撮影画像を示す模式図である。
【図8】実施例2に係る超伝導磁気測定装置のセンサ筒の断面図である。
【図9】実施例3に係る生体磁気測定装置用センサ筒カバーを示す分解斜視図である。
【図10】実施例3に係る生体磁気測定装置用センサ筒カバーを示す斜視図である。
【図11】実施例3に係る生体磁気測定装置用センサ筒カバーを被せた生体磁気測定装置の右側面図である。
【図12】実施例3に係る生体磁気測定装置用センサ筒カバーを被せたセンサ筒の断面図である。
【図13】実施例4に係る生体磁気測定装置用センサ筒カバーを被せたセンサ筒の断面図である。
【図14】実施例5に係る生体磁気測定装置用センサ筒カバーを被せた生体磁気測定装置の右側面図である。
【図15】実施例6に係るシートを示す斜視図である。
【図16】実施例7に係る生体磁気測定装置を示す正面図である。
【図17】実施例9に係る生体磁気測定装置を示す正面図である。
【図18】実施例10に係る生体磁気測定装置を示す右側面図である。
【図19】実施例10に係る生体磁気測定装置のセンサ筒を被検体に当てる操作(前半)の説明図である。
【図20】実施例10に係る生体磁気測定装置のセンサ筒を被検体に当てる操作(後半)の説明図である。
【図21】実施例11に係る生体磁気測定装置のセンサ筒を被検体に沿って移動する操作の説明図である。
【図22】実施例12に係る生体磁気測定装置の右側面図である。
【図23】試験例に用いたセンサ筒の説明図である。
【符号の説明】
【0020】
4a ナット
5a シャフト
10 センサ筒
10c 先端部
11 超伝導磁気センサ
100 超伝導磁気測定装置
【発明を実施するための最良の形態】
【0021】
以下、図に示す実施の形態によりこの発明をさらに詳細に説明する。なお、これによりこの発明が限定されるものではない。
【0022】
−実施例1−
図1は、実施例1に係る超伝導磁気測定装置100の正面図である。
この超伝導磁気測定装置100は、上面にレール2を設置された基台1と、レール2上を摺動しうる摺動脚3を持つスライド台4と、スライド台4を左右方向にスライドさせるために操作者が操作するスライド用ハンドル5と、スライド台4の上面に設置された軸受6と、回転軸8により軸受6で軸支され且つ液体ヘリウムの如き冷媒を保持するデュア7と、デュア7から突出したセンサ筒10と、センサ筒10の傾きを変えるために操作者が操作する回転用ハンドル9と、センサ筒10の先端部の内面にy方向およびx方向に配設された複数の超伝導磁気センサ11とを具備している。
なお、3次元空間のX方向を左右方向とし、Y方向を上下方向とし、Z方向を前後方向とする。センサ筒10を水平にしたとき、y方向はY方向に一致する。x方向は常にX方向に一致する。
【0023】
センサ筒10の先端部の左側面および右側面には、X線を透過しにくく且つ非磁性の材料のマーカー14,14’を具備している。マーカー14,14’は、例えばチタン製や真鍮製のネジである。左側面のマーカー14は角形であり、右側面のマーカー14’は丸形である。
【0024】
また、超伝導磁気測定装置100は、センサ筒10の先端面を含む空間をx方向にX線撮影するためのX線源15およびX線撮影用フィルム16を備えている。
【0025】
図2は、超伝導磁気測定装置100の右側面図である。
センサ筒10は、y方向幅5cm以上20cm以下、x方向幅5cm以上20cm以下の角筒である。先端部10cは、y方向については中央が上下の端より0.5cm以上4cm以下飛び出すように滑らかに湾曲し、x方向には湾曲していない。好ましい数値例では、センサ筒10のy方向幅約145mm、先端面は、y方向については中央が上下の端より0.5cm以上3cm以下飛び出すように滑らかに湾曲し、x方向には湾曲していないものである。
【0026】
図3は、センサ筒10の先端部10cの内部を示す断面図である。
センサ筒10は、内槽10aおよび外槽10bからなる。内槽10aの内面に、複数の超伝導磁気センサ11が配設されている。
【0027】
図4は、超伝導磁気センサ11を示す斜視図である。
超伝導磁気センサ11は、ガラスエポキシ製の円柱状ブロックにSQUID11a,11b,11cを配置し、その円柱状ブロックに連なる円柱状ブロックにピックアップコイル部11dを形成した、直径d(例えば20mm)の円柱状である。
【0028】
図5は、複数の超伝導磁気センサ11の配置を示す模式図である。
第1センサ列R1は、5個の超伝導磁気センサ11をy方向にピッチp(例えば20mm)で一列に並べたものである。
第1センサ列R1からx方向にピッチw(例えば20mm)だけ離れた第2センサ列R2は、5個の超伝導磁気センサ11をy方向にピッチpで一列に並べ且つ第1センサ列R1の超伝導磁気センサ11に対してp/2だけy方向位置をずらせたものである。
【0029】
図6は、1回目の測定を行った後、x方向にw/2だけスライド台4をスライドして2回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして3回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして4回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして5回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして6回目の測定を行い、その後x方向にw/2だけスライド台4をスライドして7回目の測定を行った場合の測定点の密度を示している。すなわち、y方向のスライド範囲の両端では、測定点のy方向のピッチは超伝導磁気センサ11のy方向のピッチpと等しいが、y方向のスライド範囲の中央では、測定点のy方向のピッチは超伝導磁気センサ11のy方向のピッチpの1/2になっている。
また、測定点のx方向のピッチは、センサ列のピッチwの1/2になっている。
【0030】
図7は、図2の状態でX線撮影した画像を示す模式図である。
このようなX線画像から超伝導磁気センサ11に対するマーカー14,14’のy方向の相対位置を把握することが出来る。そこで、センサ筒10の先端面を被検体Hの首や腰に当てる際にマーカー14,14’を目安にしてセンサ筒10の先端面を被検体Hの首や腰に位置決めすれば、被検体Hの首や腰に対する超伝導磁気センサ11の位置を適正に設定することが出来る。
【0031】
また、被検体Hの頚部の脊椎と各超伝導磁気センサ11の位置関係は一定であるから、頚部の脊椎と各超伝導磁気センサ11の相対位置を把握することが出来る。そこで、例えばy方向の中央に位置する超伝導磁気センサ11sで得られた信号が異常であれば、その超伝導磁気センサ11sに近い第4頸椎S4高位の脊髄や脊髄神経に異常があると判断できる。そして、第4頚椎S4に異常があると判断できれば、第4頚椎S4の近傍を切開して手術すれば足り、従来のように第2頸椎から第7頸椎まで広範囲に切開する必要がなくなり、患者の負担を軽減できる。
【0032】
実施例1の超伝導磁気測定装置100によれば、複数の超伝導磁気センサ11を配列可能な密度よりも高い密度で測定点を設定可能になる。また、センサアレイを移動可能にするのはx方向だけなので、構成の複雑化を抑制できると共に測定回数の増加も抑制することが出来る。そして、被検体Hの首を前に曲げないで頚部が自然に湾曲した状態であっても、y方向についてセンサ筒10の先端部10cを被検体Hの頚部に密着させることが出来る。また、x方向についてはセンサ筒10の先端部10cが湾曲していないので、被検体Hの頚部に引っ掛かることなく、x方向にセンサ筒10を移動させることが出来る。
同様に、被検体Hの腰を前に曲げないで腰部が自然に湾曲した状態であっても、y方向についてセンサ筒10の先端部10cを被検体Hの腰部に密着させることが出来る。
【0033】
−実施例2−
図8に示すように、円筒型の超伝導磁気センサ11(図4)の代わりに、平面型の超伝導磁気センサ11を用いてもよい。
【0034】
−実施例3−
図9は、実施例3に係る生体磁気測定装置用センサ筒カバー20を示す分解斜視図である。
この生体磁気測定装置用センサ筒カバー20は、シート21と、ホルダ22とからなる。
【0035】
シート21は、プラスチックシートであり、その表面21aおよび裏面21bは平滑面である。
【0036】
ホルダ22は、上側バー23と、上側バー23の右端に取り付けられた右プレート24と、上側バー23の左端に取り付けられた左プレート25と、右プレート24および左プレート25を下側で連結する下側バー26と、右プレート24および左プレート25にヒンジ27で軸止された押え枠28とを具備している。
【0037】
上側バー23と下側バー26の間の隙間は、生体磁気測定装置100のセンサ筒10の高さより数mmだけ大きくしてある。
右プレート24と左プレート25の間の隙間は、生体磁気測定装置100のセンサ筒10の横幅より2cm〜8cmだけ大きくしてある。
右プレート24と左プレート25の奥行きは、生体磁気測定装置100のセンサ筒10の長さより数cmだけ短くしてある。
右プレート24の前面24aおよび左プレート25の前面25aの形状は、生体磁気測定装置100のセンサ筒10の先端面の形状に適合する形状になっている。
【0038】
図10に示すように、右プレート24の前面24aおよび左プレート25の前面25aと押え枠28の間にシート21を挟んで、上側バー23に係止部28aを係止すると、シート21の形状は、生体磁気測定装置100のセンサ筒10の先端面の形状に適合する形状になる。
【0039】
図2に示すようにセンサ筒10の先端面を被検体Hの皮膚に密着させると、皮膚の湿り具合によってはセンサ筒10の先端面が皮膚にくっつき、センサ筒10を滑らかに移動させることが困難になることがある。
【0040】
そこで、図11に示すように、センサ筒10の先端部10cに生体磁気測定装置用センサ筒カバー20を被せる。
このようにすると、センサ筒10の先端面と被検体Hの間にシート21が挟まれることになる。このシート21の裏面21bは平滑面であるから、同じく平滑面であるセンサ筒10の先端面との間で滑りを生じる。一方、シート21の表面21aも平滑面であるから、被検体Hの皮膚の湿り具体によって皮膚にくっつき、滑りを生じない。従って、センサ筒10の先端面はシート21の裏面21bに接しながら滑らかにx方向(=水平方向)に移動しうる。但し、ホルダ22が垂直方向に移動しないから、センサ筒10の先端面はy方向(=垂直方向)には移動しない。
【0041】
図12は、生体磁気測定装置用センサ筒カバー20を被せたセンサ筒10の先端部10cの断面図である。
センサ筒10は、内槽10aおよび外槽10bからなる。内槽10aの内面に、複数の超伝導磁気センサ11が配設されている。
【0042】
実施例3の生体磁気測定方法、生体磁気測定装置用センサ筒カバー20、シート21および生体磁気測定装置100によれば、センサ筒10を滑らかにx方向(=水平方向)に移動できると共にy方向(=垂直方向)には移動しないようにすることが出来る。
【0043】
−実施例4−
図13に示すように、円筒型の超伝導磁気センサ11(図4)の代わりに、平面型の超伝導磁気センサ11を用いてもよい。
【0044】
−実施例5−
図14に示すように、ゴム製のサポートバンド29をホルダ22に取り付け、サポートバンド29によりホルダ22を被検体Hに一体的に装着するようにしてもよい。
ホルダ22を被検体Hに一体的に装着することにより、ホルダ22を介して被検体Hとセンサ筒10の位置関係を安定化できる。
【0045】
−実施例6−
図15に示すように、シート21の裏面21bに多数の水平方向の線状凹凸を設けてもよい。
シート21の裏面21bに多数の水平方向の線状凹凸を設けることにより、センサ筒10の先端面がシート21に対して垂直方向に滑りにくくなる。つまり、センサ筒10の先端面を水平方向にのみ滑らかに移動することが出来る。
【0046】
−実施例7−
図16に示すように、生体磁気測定装置100のセンサ筒10の先端面に多数の水平方向の線状凹凸を設けてもよい。
センサ筒10の先端面に多数の水平方向の線状凹凸を設けることにより、センサ筒10の先端面がシート21に対して垂直方向に滑りにくくなる。つまり、センサ筒10の先端面を水平方向にのみ滑らかに移動することが出来る。
【0047】
−実施例8−
ねじ止めや面ファスナーを用いて、シート21をホルダ22に保持してもよい。
【0048】
−実施例9−
図17に示すように、センサ筒10の先端部10cを、y方向については中央が上下の端より飛び出すように滑らかに湾曲し且つx方向には中央が上下の端より引っ込むように滑らかに湾曲しているサドル形の湾曲面にしてもよい。
実施例9によれば、被検体の首や腰を前に曲げないで頚部や腰部が自然に湾曲した状態であっても、y方向についてセンサ筒10の先端部10cを被検体の頚部や腰部に密着させることが出来る。さらに、x方向についてもセンサ筒10の先端部10cを被検体の頚部や腰部に密着させることが出来る。
【0049】
−実施例10−
図18に示すように、スライド台4を前後方向(Z方向)にスライドさせるために操作者が操作するスライド用ハンドル12と、スライド台4を上下方向(Y方向)にスライドさせるために操作者が操作するスライド用ハンドル13とを設けるのが好ましい。
【0050】
センサ筒10の先端面を測定対象部位Tに適正に当てるために次のように操作する。
(1)回転用ハンドル9を操作してセンサ筒10を水平にする。
(2)図19に示すように、スライド用ハンドル12およびスライド用ハンドル13を操作してセンサ筒カバー20の先端面(センサ筒カバー20をしない場合はセンサ筒10の先端面)の上辺を測定対象部位Tの上端部分に当てる。
(3)図20に示すように、測定対象部位Tの上端部分に当たっている部分を回転中心gにしてセンサ筒10の角度θを変え、センサ筒カバー20の先端面(センサ筒カバー20をしない場合はセンサ筒10の先端面)を全体的に測定対象部位Tに当てる。具体的には、回転用ハンドル9を操作してセンサ筒10の角度θを変え、それと同時にスライド用ハンドル12を操作してスライド台4を−ΔZだけ前後方向に移動し且つスライド用ハンドル13を操作してスライド台4をΔYだけ上下方向に移動する。センサ筒10を水平にした状態で回転軸8とセンサ筒10の先端面の上辺(=回転中心g)が同じ高さになるものとし、回転軸8とセンサ筒10の先端面の上辺(=回転中心g)の距離をZgとするとき、次式の関係がある。
ΔY=2×Zg×sin(θ/2)×cos(θ/2)
ΔZ=2×Zg×sin(θ/2)×sin(θ/2)
【0051】
実施例10によれば、センサ筒カバー20の先端面(センサ筒カバー20をしない場合はセンサ筒10の先端面)が被検体を擦らないので、被検体に不快感を与えることを回避することが出来る。
【0052】
−実施例11−
センサ筒10のy方向の幅が測定対象部位Tの長さよりも短い場合は、実施例10のようにしてセンサ筒10の先端面を測定対象部位Tに当てた後、次のように操作する。
(4)図21に示すように、センサ筒10の先端面の湾曲中心(円弧状ならその円弧を含む円の中心)を回転中心hにしてセンサ筒10の角度φを変え、センサ筒10の先端面を測定対象部位Tに沿って移動させる。具体的には、回転用ハンドル9を操作してセンサ筒10の角度φを変え、それと同時にスライド用ハンドル12を操作してスライド台4を−ΔZだけ前後方向に移動し且つスライド用ハンドル13を操作してスライド台4を−ΔYだけ上下方向に移動する。図21では角度φだけ回転させてセンサ筒10が水平になった状態を示しているが、回転軸8と回転中心hの距離をZhとするとき、次式の関係がある。
ΔY=2×Zh×sin(φ/2)×cos(φ/2)
ΔZ=2×Zh×sin(φ/2)×sin(φ/2)
【0053】
実施例11によれば、センサ筒10の先端面を測定対象部位Tの曲面の沿わせて移動させることが出来る。
【0054】
−実施例12−
図22に示すように、回転軸8でクレードル17を回転可能に支持し、そのクレードル17でy方向に移動可能にデュワ7を支持するようにしてもよい。
操作者がスライド用ハンドル18を操作すると、センサ筒10の先端面をy方向に移動することが出来る。
【0055】
−試験例−
図23に示すように、y方向の幅が145mm、湾曲が円弧状であり、飛出量(y方向について中央が上下の端より飛び出している量)が5mm、10mm、20mm、30mmのモデルA、B、C、Dを用意した。
頚椎疾患のために手術する予定の27名の患者さんの協力を得て、モデルA、B、C、Dと頚部の適合性を試験した。
x方向にX線撮影すると、超伝導磁気センサ11と患者の脊椎が写るので、その画像上で超伝導磁気センサ11から脊髄までの最短距離を計測した。そして、その最短距離から推定される磁界強度を算出し、その磁界強度が最大になるモデルを最適合モデルと判定した。
結果は、モデルAに対する最適合者数「2」、モデルBに対する最適合者数「11」、モデルCに対する最適合者数「14」、モデルCに対する最適合者数「0」であった。従って、頚部の測定に関しては、飛出量を5mm以上30mm以下とするのが好ましいことが判った。
【産業上の利用可能性】
【0056】
人の脊髄および脊髄神経で発生する微弱な磁気を測定する装置として利用することが出来る。
【特許請求の範囲】
【請求項1】
複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒を水平にして該センサ筒の先端面を背後から生体に近づけ、生体の一部に前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)の一部を当接させ、その当接した部分を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させることを特徴とする超伝導磁気測定装置の制御方法。
【請求項2】
複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させ、前記センサ筒の先端面の湾曲の曲率中心を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面を生体の湾曲に沿って移動させることを特徴とする超伝導磁気測定装置の制御方法。
【請求項3】
請求項1または請求項2に記載の超伝導磁気測定装置の制御方法において、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)と前記生体の間に、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)との間で滑りを生じる裏面および前記生体との間で滑りを生じない表面を有するシートを挟むことを特徴とする超伝導磁気測定装置の制御方法。
【請求項1】
複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒を水平にして該センサ筒の先端面を背後から生体に近づけ、生体の一部に前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)の一部を当接させ、その当接した部分を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させることを特徴とする超伝導磁気測定装置の制御方法。
【請求項2】
複数の超伝導磁気センサをy方向およびx方向に並べたセンサアレイと、y方向については中央が上下の端より飛び出すように滑らかに湾曲している先端面の内面に前記センサアレイを設置したセンサ筒と、前記センサ筒をx方向に移動させるための左右方向移動手段と、前記センサ筒をx方向の回転軸の周りに回転させるための回転手段と、前記センサ筒をx方向に直交する水平方向に移動させるための前後方向移動手段と、前記センサ筒を上下方向に移動させるための上下方向移動手段とを具備した超伝導磁気測定装置の前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)を全面的に生体に当接させ、前記センサ筒の先端面の湾曲の曲率中心を回転中心にしてセンサ筒の先端面を回転させて、前記センサ筒の先端面を生体の湾曲に沿って移動させることを特徴とする超伝導磁気測定装置の制御方法。
【請求項3】
請求項1または請求項2に記載の超伝導磁気測定装置の制御方法において、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)と前記生体の間に、前記センサ筒の先端面(センサ筒カバーをしている場合はセンサ筒カバーの先端面)との間で滑りを生じる裏面および前記生体との間で滑りを生じない表面を有するシートを挟むことを特徴とする超伝導磁気測定装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2012−20143(P2012−20143A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2011−185557(P2011−185557)
【出願日】平成23年8月29日(2011.8.29)
【分割の表示】特願2008−502656(P2008−502656)の分割
【原出願日】平成19年2月20日(2007.2.20)
【出願人】(593165487)学校法人金沢工業大学 (202)
【出願人】(504179255)国立大学法人 東京医科歯科大学 (228)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【分割の表示】特願2008−502656(P2008−502656)の分割
【原出願日】平成19年2月20日(2007.2.20)
【出願人】(593165487)学校法人金沢工業大学 (202)
【出願人】(504179255)国立大学法人 東京医科歯科大学 (228)
【Fターム(参考)】
[ Back to top ]