
超小型飛行機の無翼ホバリング
本発明の態様は、無翼ホバリング超小型飛行機(WHOMAV)およびその電源ユニット(PSU)に関する。態様は、ホバリングし、予想される突風に耐える適正な電力レベルで動作し得る。本発明の態様は、15cm未満の直径を有し得る。態様は、一つまたは複数の滑らかな(連続的な曲率の)表面を有してもよく、電磁的および電気流体力学的原理を用いて動作されてもよい。具体的な態様の無翼設計により、回転成分または移動成分のない動作が可能となる。さらなる態様は、周囲の流れ状態に能動的に対応することができる。層流境界層付着が不可能であることに起因する揚抗比の低下および翼効率低下の問題はまた、著しく低減されるか、または排除され得る。電磁力は、ポリマー絶縁体、誘電体、または絶縁特性を有するその他の材料によって分離された一組の接地電極と電源電極との間にパルス(交流/rf)電圧を印加することによって発生し得る。

【発明の詳細な説明】
【技術分野】
【0001】
関連出願の相互参照
本出願は、2006年7月31日に出願された米国特許出願第60/834,265号の恩典を主張し、2007年5月8日に出願された米国特許出願第60/928,207号の恩典を主張し、これらの両方は任意の図、表、または図面を含む全体が参照により本明細書に組み入れられる。
【背景技術】
【0002】
発明の背景
典型的な無人航空機(UAV)の翼スパンは15cm未満である。従来の有翼MAVでは、操縦翼面が吹きさらしであり、したがって、飛行体の飛行速度に匹敵する速度の突風に対して非常に敏感である。
【0003】
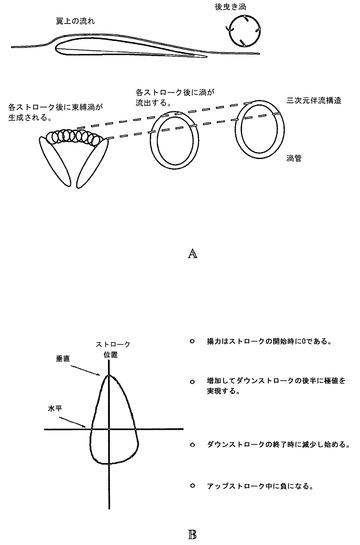
超小型飛行機(MAV)における従来の揚力発生機構が図1Aに示される。図1Aの上段を参照すると、従来の翼型が翼の後流に定常状態の定在渦を発生させるように、空気が剥離することなく翼表面を移動する。この渦は揚力発生には影響しない。図1Aの下段に示されるように、羽ばたき翼は、揚力を発生させる各ストロークで渦管を発生させることができる。図1Aの下段を参照すると、羽ばたき翼対の各ストローク後に束縛渦が生成され、図1Aには2つの束縛渦が示される。束縛渦は、渦管とみなされ得る三次元の伴流構造を形成する。各ストローク後に生成される束縛渦は、羽ばたき翼対のための揚力源である。しかし、この揚力の大きさは不安定である。羽ばたき翼の結果得られる渦管によって生じる揚力の大きさの性質が、図1Bにプロットされる。羽ばたき翼は、理論的には、自然界の昆虫と鳥を模倣したものであるが、剛性のある羽ばたき翼によって発生する揚力は、中程度の突風でこの渦管の崩壊によって容易に消失し得る。渦管の崩壊によって生じる揚力の消失は、剛性のある羽ばたき翼を使ったMAVのホバリング能力に重大な制限をもたらす。羽ばたき飛行と翼型飛行の主な違いは、羽ばたき飛行では翼渦の生成と流出が持続することである。
【0004】
高速気流の磁気流体力学(MHD)制御の分野では、実験的および理論的に有意な取り組みがなされている。プラズマへの外部磁場の影響が流れ制御を目的とした検討されてきた。Bush(1958)による最初の計算実証以後に、Zimmer(1969)は、強力な磁場とプラズマが半球体の前における弧状衝撃波のスタンドオフ距離を7.5倍変えることを示した。最近になって、研究者ら(Menart et al.)は、磁場がプラズマと組み合わさると流れ場が変ることを示している。しかし、正確な機構はいまだ不明である。
【0005】
無線周波数(rf)が誘導する表面誘電体バリア放電(DBD)によって生じる電気的体積力は、低速流れ制御に用いられ得る。そのような用途の一つは、誘導される壁面噴流によって剥離流を再付着させることである(Roth, 2003; Corke et al., 2005; Roy and Gaitonde; 2005; Gaitonde et al., 2006)。
【0006】
当技術分野においては、従来の有翼MAVほど突風に敏感でないMAVの必要性がある。
【発明の概要】
【0007】
簡単な概要
本発明の態様は、無翼ホバリング超小型飛行機(WHOMAV)に関する。WHOMAVの態様では電源ユニット(PSU)を組み入れることができ、電源ユニットは、たとえば、バッテリ、または当技術分野において公知の他の適切な電源を含み得る。態様は、ホバリングするとともに予想される突風に耐え得る適正な電力レベルで動作し得る。本発明の態様では、15cm未満の直径を有し得る。態様は、一つまたは複数の滑らかな(連続的な曲率の)表面を有してもよいし、電磁的および/または電気流体力学的原理を用いて動作されてもよい。具体的な態様の無翼設計により、回転成分または移動成分のない動作が可能となる。さらなる態様では、周囲の流動状態に能動的に応答し得る。層流境界層付着が不可能であることに起因する揚抗比の低下および翼効率低下の問題はまた、著しく低減されるか、または排除され得る。電磁力は、ポリマー絶縁体、誘電体、または絶縁特性を有するその他の材料によって分離された一組の接地電極と電源電極との間にパルス(交流/rf)電圧を印加することによって発生し得る。このような電極に印加される直流電流はまた、電磁力を提供するために用いられ得る。具体的な態様において、永久磁石、または電磁石などの他の磁場源がデバイス内に磁場を形成するために使用され得、これにより電流が流れる導体に選択的な偏力(J×B)を形成することができる。導体内の電流および/またはB場の強度は、この偏力を調整するために変更され得る。
【0008】
本無翼WHOMAV設計の物理的重量は、従来の有翼超小型飛行機(MAV)の重量と同等であってもよいが、本WHOMAVの態様は以下の3つの利点のうちの一つまたは複数の利点を提供し得る。第1に、内側面は動作を制御し得るが、内側面は、突風を受けることがなく、したがって、周囲流の非定常性による影響はきわめて少ない。第2に、内部コア部(internal core)および外側曲面は、垂直方向の加速度を操作することによって慣性を制御するために用いられ得る。第3に、中立の平衡状態にある円環盤(annular disc)への風荷重は最小値または最小値に近い。WHOMAVのボディは、様々な設計と形状を有し得る。具体的な態様において、ボディは風からの荷重を最小にするように設計される。ボディ設計の例は、円盤形状を含むがこれに限定されない。本発明の態様は、小型アクチュエータの使用など、エネルギー効率を改善する一つまたは複数のさらなる技法を組み入れことができる。態様は、操縦性と突風の許容範囲に応じて特有であってもよい。具体的な態様は、従来の翼を失速させかねない時間依存性の大規模剥離を十分に管理することができる。
【0009】
本発明による無翼設計は、現実的なMAVだけでなく、様々なさらなる用途に組み入れられ得るものである。流れ場の力学、電磁気的形態、および飛行力学への結果応答の間の相関を見つけるために、実験的試験と数値モデリングが使用され得る。重量および効率に関する数値最適化と試験は、設計を最適化するために実施され得る。無翼設計に用いられる揚力機構も、有翼MAVに組み入れられ得る。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて最小化され得る。流れ応答の検出には、非従来型のMEMSの局所的表面摩擦/せん断応力センサが使用されてもよい。環境風および/または突風から生じる可能性のある検出された流れ応答に応じて、電極の様々な組み換え(permutation)が駆動されて、検出された流れ応答に適合する力を形成し得る。
【図面の簡単な説明】
【0010】
【図1】従来の有翼超小型飛行機に関する飛行力学を示す。図1Aは、従来の翼型翼上の流れから生じる後曳き渦と、渦管の発生が羽ばたき翼による揚力を助ける例とを示し、図1Bは、羽ばたき翼による羽ばたきサイクル中の揚力の大きさと、この揚力の非定常性とを示す。
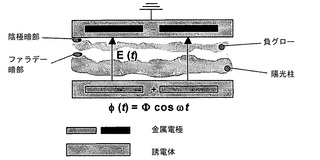
【図2A】標準的なRFグロー放電単層アクチュエータを示し、常誘電体の例を示す。
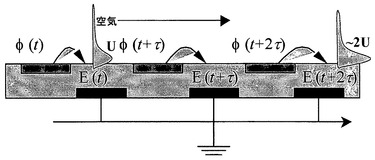
【図2B】標準的なRFグロー放電単層アクチュエータを示し、蠕動多相流量制御の例を示す。
【図2C】標準的なRFグロー放電単層アクチュエータを示し、標準単層設計を示す。
【図2D】標準的なRFグロー放電単層アクチュエータを示し、放電によって、弱い局所壁面空気噴流(U 約1〜2m/s)が誘導される様子を示す。
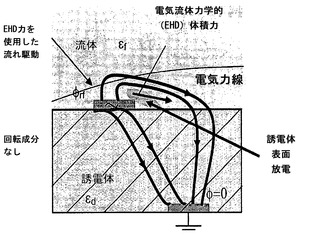
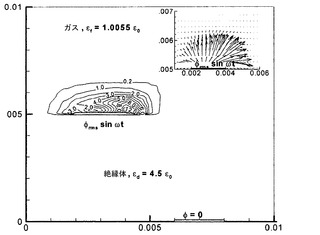
【図3A】静止ヘリウムガスのプラズマ駆動(plasma actuation)を示し、表面DBDを使用した流れ駆動の一態様の概略図を示す。
【図3B】静止ヘリウムガスのプラズマ駆動を示し、露出電極の近くの局所的ピークを表す。
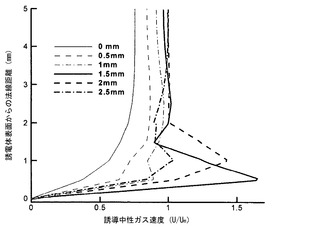
【図3C】静止ヘリウムガスのプラズマ駆動を示し、異なる流れ方向に沿ったガス速度プロファイルを示す。
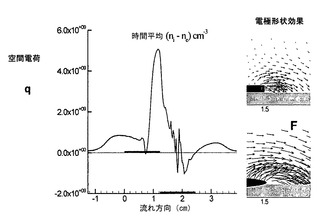
【図4A】数値シミュレーションの結果を示し、負電荷蓄積と、誘導体積力への電極形状の影響とを裏付ける誘電体上の空間電荷分布を示す。
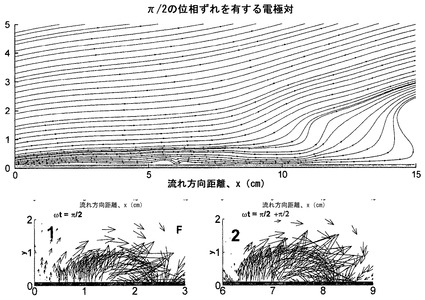
【図4B】数値シミュレーションの結果を示し、位相ずれに起因する蠕動効果を裏付ける力と流れ付着の結果を示す。
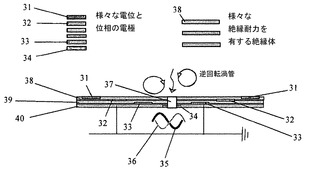
【図5】本発明の一態様を示す。図5Aは、本発明の態様の概略図を示し、図5Bは、態様の電極配置を示す。
【図6A】本発明の一態様の表面に関する電極構造を示し、アクチュエータ性能を改良するための本態様の多層設計の概略図を示す。
【図6B】本発明の一態様の表面に関する電極構造を示し、どのように、定常放電が拡張領域において著しく大きい体積力を誘導し、結果として壁面噴流速度が可能な桁数だけ増大するかを示す。
【図6C】本発明の一態様の表面に関する電極構造を示し、拡張領域に大きな体積力を誘導するために使用され得る別の電極レイアウトを示す。
【図7】本開示の多層アクチュエータの第2の態様であって、層数を増加させたものの概略図を示す。
【図8】本発明による多層アクチュエータのさらにいくつかの例示的な態様を示す。
【図9】開口を通じて空気を流すことができる逆回転渦を生じさせるために用いられ得る電極構造を示す。
【図10】本発明による多重バリアプラズマアクチュエータ(MBPA)のいくつかの態様に対して予想される速度の増加を示す。
【図11】本発明による揚力増強のためのアクチュエータ設計の一態様の放電を示す。
【図12】推力増強のための幅広いグロー(約4cm)を示す、本発明によるアクチュエータの一態様の放電を示す。
【図13】プラズマの厚さを左手と比較して示す、本発明によるアクチュエータの一態様の横からの放電写真を示す。
【図14】本発明による非常に幅広い(約6cm)グローを有する新しいプラズマアクチュエータの一態様を示す。
【発明を実施するための形態】
【0011】
詳細な開示
本発明の態様は、無翼ホバリング超小型飛行機(WHOMAV)に関する。WHOMAVの態様は電源ユニット(PSU)を組み入れることができ、電源ユニットは、たとえば、バッテリ、または当技術分野において公知のその他の適切な電源を含み得る。態様は、ホバリングし、予想される突風に耐える適正な電力レベルで動作し得る。本発明の態様では、15cm未満の直径を有し得る。態様は、一つまたは複数の滑らかな(連続的な曲率の)表面を有してもよいし、かつ、電磁的および/または電気流体力学的原理を用いて動作してもよい。具体的な態様の無翼設計は、回転成分または移動成分のない動作を可能とし得る。さらなる態様では、周囲の流れ状態に能動的に応答し得る。層流境界層付着が不可能であることに起因する揚抗比の低下および翼効率低下の問題はまた、著しく低減されるか、または排除され得る。電磁力は、ポリマー絶縁体、誘電体、または絶縁特性を有するその他の材料によって分離された一組の接地電極と電源電極との間にパルス(交流/rf)電圧を印加することによって発生し得る。このような電極に印加される直流電流はまた、電磁力を提供するために用いられ得る。具体的な態様において、永久磁石、または電磁石などの他の磁場源がデバイス内に磁場を形成するために使用され得、これにより電流が流れる導体に選択的な偏力(J×B)を形成することができる。導体内の電流および/またはB場の強度は、この偏力を調整するために変更され得る。
【0012】
本無翼WHOMAV設計の物理的重量は、従来の有翼超小型飛行機(MAV)の重量と同等であってもよいが、本WHOMAVの態様は以下の3つの利点のうちの一つまたは複数の利点を提供し得る。第1に、内側面は動作を制御し得るが、内側面は、突風を受けることがなく、したがって、周囲流の非定常性による影響はきわめて少ない。第2に、内部コア部および外側曲面は、垂直方向の加速度を操作することによって慣性を制御するために用いられ得る。第3に、中立の平衡状態にある円環盤への風荷重は最小値であるかまたは最小値に近い。WHOMAVのボディは、様々な設計と形状を有し得る。ある具体的な態様において、ボディは風からの荷重を最小にするように設計される。ボディ設計の例は、円盤形状を含むがこれに限定されない。本発明の態様は、小型アクチュエータの使用など、エネルギー効率を改善するために一つまたは複数のさらなる技法を組み入れことができる。態様は、操縦性と突風の許容範囲に応じて特有であってもよい。具体的な態様は、従来の翼を失速させかねない時間依存性の大規模剥離を十分に管理することができる。
【0013】
本発明による無翼設計は、現実的なMAVだけでなく、様々なさらなる用途に組み入れられ得る。流れ場の力学、電磁気的形態、および飛行力学への結果応答の間の相関を見つけるために実験的試験と数値モデリングが使用され得る。重量および効率に関する数値最適化と試験が、設計を最適化するために実施され得る。無翼設計に用いられる揚力機構は、有翼MAVにも組み入れられ得る。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて最小化され得る。流れ応答の検出には、非従来型のMEMSの局所的表面摩擦/せん断応力センサが使用されてもよい。
【0014】
本発明の態様は電流力によって揚力を発生し得るものであり、電流力は所望の時間の間、局所的に安定化されて正確に制御され得る。航空宇宙用途において遭遇する速度領域のすべてではなくても、多くの速度領域において電流力を使用して流れ制御をすることでいくつかの利益が得られる。可動部品がないことおよび高速オン/オフ機能に加え、電磁気装置(electromagnetic device)は大きい力を比較的正確に加える能力を有する。最近の実験(Roth, 2003; Enloe et al., 2003)および数値的研究(Roy, 2005; Roy and Gaitonde, 2006a, b; Gaitonde et al., 2005, 2006)は、低速における無線周波数(rf)誘導誘電体バリア放電(DBD)の顕著な流れ制御効果を実証することに成功しており、本発明の態様に組み入れられ得るこのようなrf誘導誘電体バリア放電法の教示が参照により本明細書に組み入れられる。プラズマアクチュエータとも称されるこれらのrf誘導誘電体バリア放電デバイスは、適正な電力(ワット)で動作するが、効率的な制御のために大きいローレンツ力の誘起するのに必要な磁場を印加しなければならないような、比較的高い流速では性能が低下し、電力要件がkWまで増加する可能性がある(Miles, 2000; Leonov and Bityurin, 2002)。無翼設計を組み入れる本発明の態様は、以下の利点の一つまたは複数を提供し得る。(a)電力要件が著しく小さいこと、(b)乱流の痕跡を残す回転機構がないこと、および(c)精密制御によって適度な突風状態で十分な揚力と巡航速度を発生することである。より高い飛行速度を発生するためには、小さい磁場の印加が有利であり得る。電気的体積力qEが従来の有翼MAVの翼の代わりに使用され得る。
【0015】
図2は、低速におけるそれぞれ常誘電体(図2A)と蠕動(図2B)流れ加速とに対するkHzレベルのrf誘導大気グロー放電の概略図を示す。その例が図2Bに示される表面放電においては、一方の電極は一般的には流れ面に曝されており、他方の電極は絶縁体の層に埋め込まれて流れ面に曝された電極から流れの方向に少し離れた位置にある。この標準的な配置は単層設計と呼ばれる場合がある。一態様において、流れ面に曝された電極は、電極と流れ環境との間に誘電体コーティングを有してもよい。放電によって発生する電場は、この幾何学的非対称性と、電子およびイオンそれぞれの本質的に非常に異なる移動度に関連した非対称性との結果である。間欠放電によって発生される正味の力はイオン「風」を誘導するが、イオンニュートラル衝突移動機構は、所望される表面の壁面噴流のような効果を発生させる(Roy and Gaitonde, 2006; Roy et al., 2006)。
【0016】
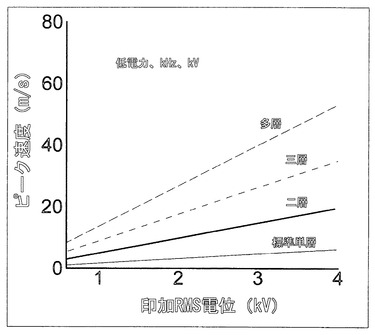
これらの力に対する流体の応答は、遷移と乱流が支配的な状態では、複雑な形状を通過する流体の完全な流体方程式の解を必要とする(Gaitonde et al., 2005, 2006)。本発明者らは、Corkeら(2002)に基づくHultgrenおよびAshpis(AIAA-2003-1025)の標準的な単層設計を構築して(図2C)試験している(図2D)。放電は、小さい領域で体積力を誘導し、弱い壁面噴流を生じる(Anderson and Roy, AIAA-2006-369)。多層rf電源を電極に印加することにより、図2Bの右端に図式的に示されるように誘導速度をほぼ2倍にすることができる(Roth, 2003; Roy et al., 2006; Roy and Singh, 2006)。このような構造と多層rf電源は、本発明の態様に組み入れられ得る。しかし、これは適正な電力と高価な電源を必要とし得る。この設計は、kHzのrf電源を必要とし得、アークを発生し得る(図2Cの矢印参照)ので放電が不安定となる。
【0017】
図3は、電気力学的体積力qEが 静止状態のヘリウム作動ガスの中でさえも壁面噴流の誘導を通じて流れを能動的に制御する過程を示す(Roy, et al., APL, 2005)。図3Aは、表面DBDを使用した流れ駆動に関する概略図を示す。図3Bにおける電極誘電体表面を中心とした電気力(electric force)qEの変動は、5kHzにおいて1kVrmsのrf電圧が供給される露出電極の近くで局所的ピークを表わす。この力によって誘導される流れ方向のガス速度プロファイルは、静止ガス環境下において図3Cに種々の場所に沿って示される。
【0018】
電流力に起因する流れの制御への電気的パラメータおよび幾何学的パラメータの影響を理解するためにいくつかの研究がある(Roth, 2003; Enloe et al., 2003; Roy et al., 2006)。図4は、電極形状および電源位相に起因するこのような影響のシミュレーションの詳細を示す。半径が小さくなると、電場密度が高くなるためにより大きい力が誘導される(図4A)。また、電力を電極に特定の位相差で供給することにより、誘導力(induced force)が増強されて壁面噴流速度がほぼ2倍になる(図4B)。
【0019】
超小型飛行機の無翼ホバリングの態様は、飛行機のホバリングを可能にする十分な揚力を有し得る。翼を有する一般的な無人航空機(UAV)は、15cm未満の翼スパンを有する。本発明の態様は、15cmよりもさらに小さくてもよい。本発明によるWHOMAVの態様は滑らかで連続的な曲率の表面を有し得るし、電磁気学的技法を用いて提供される揚力を有し得る。WHOMAVの中心中空部にある表面誘電体バリア放電(DBD)に供給されるrf多相電源によって、渦巻状の流体柱が誘導され得る。rf多相電源を表面DBDに印加することにより、ホバリングまたは着陸に十分な上向きまたは下向きの力を形成することができる。WHOMAVの外面は、内円錐面と同様に、飛行機の操縦性を容易にすることができる。具体的な態様において、WHOMAVの公称巡航速度は約7〜10m/s(23〜33ft/s)である。本発明によるWHOMAVの様々な態様の無翼設計に関する、いくつかの利点がある。このような長所は、回転成分がないこと、移動成分がないこと、および周囲の流れ状態に能動的に応答することのうちの一つまたは複数を含むが、これらに限定されない。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて最小化され得る。層流境界層付着が不能であることに起因する揚抗比の低下および翼効率低下の問題はまた、実質的に低減されるか、または排除され得る。
【0020】
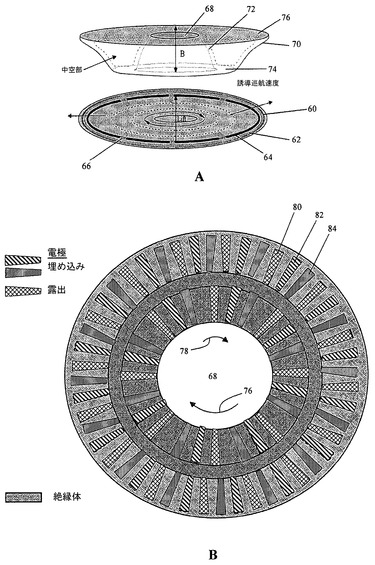
本発明の態様によるWHOMAVの基本形状は、内側開口および外面に沿って角形曲面形状(angularly curved shape)を有する中空ドーナツ状であってもよい。高速上昇運動のために、および緩やかに着陸する場合に下降運動を遅らせるために、円錐形は、流体加速によって揚力を増強することができる。このような同軸デバイスの概略図が図5Aに示される。WHOMAVを貫通する開口を形成する内面は、デバイス最上部の開口の直径がデバイス最下部の開口の直径よりも小さくなるように傾斜されてもよい。一態様において、WHOMAVは3cmより大きい内径、11cm未満の外径、および5cm未満の高さを有する。さらなる態様は、周辺に沿った不連続な円形電極など、他の電極構成を用い得る。図5Aおよび5Bに示されるWHOMAVの態様の一般的な内部および外部の平均寸法は、公称高さ4cmでそれぞれ4cmおよび10cmであってもよい。デバイスは、重量を軽減して構造的剛性を増加するために中空シェルとして設計され得る。中空シェルは電源ユニットを受け入れるのにも役立ち得る。具体的な態様において、中空ボディには、デバイスが中にある環境流体とは異なる流体が満たされ得る。例には、デバイスを上昇させやすくするために、空気よりも軽い流体などの、環境流体よりも軽い流体が含まれるがこれらに限定されない。デバイスのボディには、炭素系の材料、プラスチック、バルサ材などの木材、金属、可撓性材料、および誘電材料を含む、様々な材料が使用され得るが、これらに限定されない。
【0021】
図5Aを参照すると、3つの同心の不連続な円形電極60、62、および64があり、これらは上面76にある開路(break)66によって不連続な部分に分割される。これらの同心電極60、62、および64は、電極の駆動によってWHOMAVの中心に向かって、あるいはWHOMAVの中心から離れる方向に放射状流れが生じるように、図6Aに示される電極とほぼ同様に、上面76を生成するボディ層、および/または下層74を生成するボディ層に対して配置され得る。
【0022】
デバイスの周辺に設置された種々のセグメントを種々の駆動電圧で駆動することにより、デバイスの水平移動が助けられるように、正味の力を一方向にすることができる。流れを増強するために、さらなる不連続同心電極が上面76に設置され得る。さらなる態様において、本開示を通じて開示されているように、3つよりも多くの電極を1組とする電極の組も用いられ得る。態様はまた、揚力または下向きの力が生じるように、内面72および/または外面70に不連続円形電極を組み入れることができる。内面および/外面にある円形電極の組は、必要に応じて連続的であり得る。
【0023】
図5Bを参照すると、図6Aに示される電極とほぼ同様に、デバイスの内面72と外面70に設置された複数組の電極80、82、および84が示されている。内面および/または外面にある複数組の電極を駆動することにより、参照符号76および78などの円形流れを生じさせることができ、これは回転壁面噴流を形成してWHOMAVのボディを回転させ得る。さらなる態様において、本開示を通じて開示されているように、3つよりも多くの電極を1組とする電極の組も用いられ得る。態様はまた、円形流れが生じかつ/あるいはデバイスを回転させるようにデバイスの上面および/または下面にこのような組の電極を組み入れることができる。これらの電極の組は、デバイスを水平方向に移動させ、かつ/あるいは検出された風または突風の影響を弱める流れが生じるように選択的に駆動され得る。
【0024】
別の態様において、サイズは容易に拡大または縮小され、他の形状が実施され得る。同軸形状において、内面および外面には、電極層がコーティングされ得る。これらの電極は、たとえば、セラミックまたはポリマー絶縁スリーブを用いて選択的に露出され、またはコーティングされる。図5Aに示される態様に対する電極の配置が図5Bに示される。一態様において、一連の多層アクチュエータが用いられ得る。代表的な多層設計の概略図が図6Aに示される。この配置は、平板上の単一アクチュエータに対して60Hzの周波数の電源を用いて試験されている。得られた放電は、安定しており、ほぼ4倍強力なピークの壁面噴流を生じさせる作用面(work surface)(図6B参照)にわたる、より大きい領域に及んでいる。図6Aにおけるa、b、およびcなどの物理的パラメータは、アクチュエータの所望の性能に対して最適化され得る。
【0025】
一態様において、図6Aに示されるアクチュエータの電極は、選択された位相差で電力供給される。低いmA領域の電流と数百ボルトrmsの電位差が電極間に印加される場合、106〜107V/cmの電場によって密度が1012〜1013cm-3のグロー(微小)放電プラズマが発生する。このプラズマの厚さは、数デバイ長、すなわち、数mm〜1mm未満の範囲にある。誘導されるqEの力は非常に局所的であるが、この体積力のローレンツ相互作用は、周囲流体と共に、デバイスの円錐内面および外面に沿って回転して徐々に加速する壁面噴流を生じさせる。この回転壁面噴流は、強度Γの渦を誘導する。一般化されたKutta-Joukowskiの定理は、
で示され、ここで、FはUの自由流におけるn個の渦によって発生する、システムへの合力である。したがって、以下に説明される流れ制御機構を用いてホバリングのための十分な揚力が発生し得る。電極は、強制循環Γが維持され得るように配置され得る。一態様において、図5Aに示される電極の多層配置が用いられ得、それにより以下に説明される流れ制御機構によって最大7〜10m/sの水平誘導速度が得られ得る。
【0026】
パッシェンの法則は、作動媒体中のイオン化に最もエネルギー効率の良い点がストルトウ(Stoletow)点であると結論づけている。空気の場合、360Vの最小絶縁破壊電圧およびガス圧力と電極間距離との積p.d=5.7Torr-mmが、最大のイオン化に要求される。流れ制御の場合、大気圧に近い用途では、最大容量イオン化(maximum volumetric ionization)に必要な許容電極間隔は、d=77μmである。多層マイクロアクチュエータ設計を用いる態様は、このような電極間隔を実現し得る。単層アクチュエータの代替として、多層アクチュエータが用いられ得る。多層アクチュエータは、各々が一つの電極を包囲する複数の誘電体層を有し得る。
【0027】
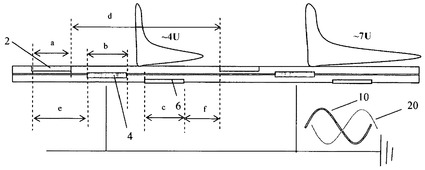
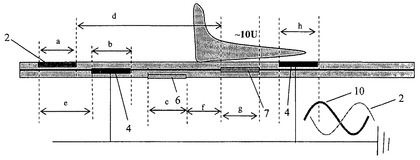
図6Aは二層態様の概略図を示す。一態様において、電極間距離dは、数μmに保たれてkHzのrf電力要件を緩和するか、あるいは排除する。電圧10が電極2と電極4との間に印加され、電圧20が電極6と電極4との間に印加される。図6Bに示される試験の場合、電極は、ネオントランスを介してコンセントの交流電源(60Hz)から電力供給され、図1に示される単層設計よりもはるかに大きい幅にまで及ぶ定常グローに関して試験される。測定値は、誘導された噴流速度が少なくとも4倍(約4U)増加していることを示す。一態様において、パルス交流/直流電源から電力供給される1組の位相遅延された電極が使用され得る。このような1組の位相遅延された電極からの誘導壁面噴流は、最大約7〜10m/sまで1桁改善され得る。このような誘導壁面噴流の大きさは、本WHOMAVの態様の適正な巡航速度に対して十分であり得る。図6Cは、図6Aの態様に類似した態様であって、流れを増強するために、電極2および6とは位相がずれた接地電極4に対して駆動され得る、追加電極7を有するものを示す。
【0028】
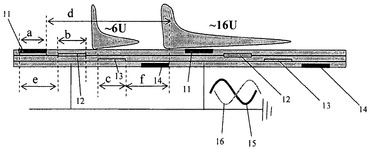
図7は、多層配置の場合のきわめて大きい加速ゲイン(acceleration gain)(すなわち、>15Uの誘導速度)を示す。電圧パターン15は表面に最も近い電極11と接地電極13との間に印加されるが、電圧パターン16は電極12と接地電極13との間に印加される。これは、単層配置と同じプラズマエネルギー密度に対して実現されてもよい。さらなる態様においては、プラズマコーティングされた表面積を増すために層数を増加することができる。つまり、より大きいEHD体積力が得られ、結果としてより大きいガス速度が誘導される。また、この速度においては、小規模乱流が流れ駆動過程を支配する場合がある。さらに、μmレベルの絶縁体の厚さが誘導力に影響を与える場合がある。電極は、様々な流れパターンを誘導するために、それぞれ様々な構成とパターンで設置されて駆動され得る。例として図9に示されるように、大きい逆回転渦または小さい逆回転渦を形成するために流れ駆動を使用することができる。加えられた位相差に基づいて、これらの逆回転渦管の位置をわずかにまたは大きくずらすことができる。図9は開口37を示しており、この開口は逆回転渦管が開口37を通る流れを駆動するような、たとえば、デバイスの開口68であってもよい。一態様において、種々のボディ形状の周辺に生成するものと類似した様々な渦構造を形成することができる。たとえば、選択されたデューティサイクルで、π/2の位相差で動作する電極の組に対して、円柱状物体上を流れるカルマン渦列を容易に発生させることができる。合成噴流の代わりに有力な代替(alternative)もまたこの設計において実施することができる。
【0029】
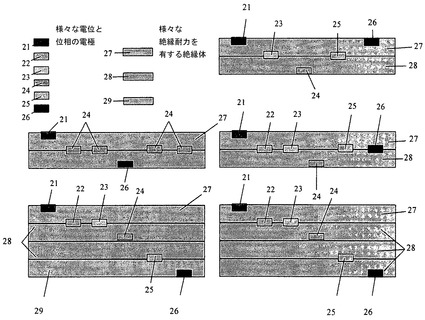
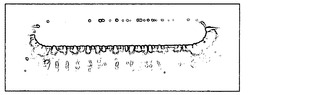
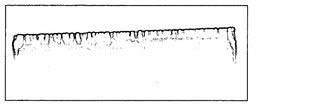
図8は、本発明による多層アクチュエータのさらにいくつかの例示的な態様を示し、様々な幾何学的および電気的構成を示す。誘電材料内部の熱損失を最小限に抑えるために、たとえば、KAPTON(商標)およびTEFLON(商標)、これらの組合せなど、様々な絶縁体材料が用いられ得る。本発明の多層アクチュエータは、任意の数の絶縁層、絶縁材厚さ、絶縁耐力、電極数、電極幅、電極間ギャップ、印加周波数、デューティサイクル、および電圧などを有してもよい。図10は、本発明による多重バリアプラズマアクチュエータ(MBPA)の態様に対して推定される速度の増加を示す。図11は、本発明による揚力増強のためのアクチュエータ設計の一態様の放電を示す。図12は、推力増強のための幅広いグロー(約4cm)を示す、一態様のアクチュエータの放電を示す。図13は、本発明の一態様の側面からの放電写真を示すものであってプラズマの厚さを左手と比較して示す。図14は、本発明による非常に幅広い(約6cm)グローを有するプラズマアクチュエータの一態様を示す。
【0030】
従来の有翼MAVでは、操縦翼面が吹きさらしであり、したがって、飛行体の飛行速度に匹敵する速度の突風に対して非常に敏感である。本WHOMAVの態様では、従来のMAVの物理的重量と同様の物理的重量を有し得る。本WHOMAVは2つの大きな長所を有し得る。第1に、本WHOMAVは突風を受けない内側面を有し、したがって、周囲流の非定常性による影響はきわめて少ない。第2に、この面は、垂直方向の加速度を操作することによって慣性を制御するためにも用いられ得る。従来のMAVに関する電力管理技術を、本WHOMAVの具体的な態様に組み入れることができる。エネルギー効率もまた、小型アクチュエータを用いて改善することができる。突風を受けない内側面の組入れは、垂直方向の加速度を操作することによって慣性を制御するためにも用いられ得るもので、これにより操縦性が得られ、突風が許容され、これにより一般的に従来のMAV翼を失速させるような時間依存性の大規模剥離の管理が可能となる。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて低減または最小化され得る。本WHOMAVの態様に従った流れ応答の検出には、非従来型のMEMSの局所的表面摩擦/せん断応力センサも使用され得る。
【0031】
一態様においては、電極を高圧電源と計器につないで、動作を正確に監視し、どのような条件で離昇するのかを判断定することができる。さらなる態様において、円形飛行機(circular plane)の外側面の周囲にさらに多くの電極が取り付けられてもよい。これらの電極も、高圧電源に接続されて、水平方向の移動し得る。気体流の速度と温度は、円形デバイスが空中に浮かんでいる間に計器によって監視され得る。実験データが取得されて見直され、それによりデバイスの所望の垂直上昇と水平移動に最小量の電力が使用されるよう、電極位置が最適化され得る。
【0032】
別の態様において、WHOMAVの全体的な質量を著しく増加させることなく、電源は、WHOMAVの中に設置される。具体的な態様において、これはMOSFETベースの駆動回路技術により、エポキシ樹脂に封入された高圧電源を用いて実現され得る。
【0033】
本明細書において言及または引用されたすべての特許、特許出願、仮出願、および刊行物は、すべての図および表を含む全体が、本明細書の明示的教示と矛盾しない範囲で、参照により本明細書に組み入れられる。
【0034】
本明細書に記載された実施例および態様は例示のみを目的としており、上記実施例および態様を考慮した様々な修正態様または変更態様が当業者に示唆されるものと考えられ、本出願の精神と範囲内に含まれるべきであることを理解されたい。
【0035】
参照文献
【技術分野】
【0001】
関連出願の相互参照
本出願は、2006年7月31日に出願された米国特許出願第60/834,265号の恩典を主張し、2007年5月8日に出願された米国特許出願第60/928,207号の恩典を主張し、これらの両方は任意の図、表、または図面を含む全体が参照により本明細書に組み入れられる。
【背景技術】
【0002】
発明の背景
典型的な無人航空機(UAV)の翼スパンは15cm未満である。従来の有翼MAVでは、操縦翼面が吹きさらしであり、したがって、飛行体の飛行速度に匹敵する速度の突風に対して非常に敏感である。
【0003】
超小型飛行機(MAV)における従来の揚力発生機構が図1Aに示される。図1Aの上段を参照すると、従来の翼型が翼の後流に定常状態の定在渦を発生させるように、空気が剥離することなく翼表面を移動する。この渦は揚力発生には影響しない。図1Aの下段に示されるように、羽ばたき翼は、揚力を発生させる各ストロークで渦管を発生させることができる。図1Aの下段を参照すると、羽ばたき翼対の各ストローク後に束縛渦が生成され、図1Aには2つの束縛渦が示される。束縛渦は、渦管とみなされ得る三次元の伴流構造を形成する。各ストローク後に生成される束縛渦は、羽ばたき翼対のための揚力源である。しかし、この揚力の大きさは不安定である。羽ばたき翼の結果得られる渦管によって生じる揚力の大きさの性質が、図1Bにプロットされる。羽ばたき翼は、理論的には、自然界の昆虫と鳥を模倣したものであるが、剛性のある羽ばたき翼によって発生する揚力は、中程度の突風でこの渦管の崩壊によって容易に消失し得る。渦管の崩壊によって生じる揚力の消失は、剛性のある羽ばたき翼を使ったMAVのホバリング能力に重大な制限をもたらす。羽ばたき飛行と翼型飛行の主な違いは、羽ばたき飛行では翼渦の生成と流出が持続することである。
【0004】
高速気流の磁気流体力学(MHD)制御の分野では、実験的および理論的に有意な取り組みがなされている。プラズマへの外部磁場の影響が流れ制御を目的とした検討されてきた。Bush(1958)による最初の計算実証以後に、Zimmer(1969)は、強力な磁場とプラズマが半球体の前における弧状衝撃波のスタンドオフ距離を7.5倍変えることを示した。最近になって、研究者ら(Menart et al.)は、磁場がプラズマと組み合わさると流れ場が変ることを示している。しかし、正確な機構はいまだ不明である。
【0005】
無線周波数(rf)が誘導する表面誘電体バリア放電(DBD)によって生じる電気的体積力は、低速流れ制御に用いられ得る。そのような用途の一つは、誘導される壁面噴流によって剥離流を再付着させることである(Roth, 2003; Corke et al., 2005; Roy and Gaitonde; 2005; Gaitonde et al., 2006)。
【0006】
当技術分野においては、従来の有翼MAVほど突風に敏感でないMAVの必要性がある。
【発明の概要】
【0007】
簡単な概要
本発明の態様は、無翼ホバリング超小型飛行機(WHOMAV)に関する。WHOMAVの態様では電源ユニット(PSU)を組み入れることができ、電源ユニットは、たとえば、バッテリ、または当技術分野において公知の他の適切な電源を含み得る。態様は、ホバリングするとともに予想される突風に耐え得る適正な電力レベルで動作し得る。本発明の態様では、15cm未満の直径を有し得る。態様は、一つまたは複数の滑らかな(連続的な曲率の)表面を有してもよいし、電磁的および/または電気流体力学的原理を用いて動作されてもよい。具体的な態様の無翼設計により、回転成分または移動成分のない動作が可能となる。さらなる態様では、周囲の流動状態に能動的に応答し得る。層流境界層付着が不可能であることに起因する揚抗比の低下および翼効率低下の問題はまた、著しく低減されるか、または排除され得る。電磁力は、ポリマー絶縁体、誘電体、または絶縁特性を有するその他の材料によって分離された一組の接地電極と電源電極との間にパルス(交流/rf)電圧を印加することによって発生し得る。このような電極に印加される直流電流はまた、電磁力を提供するために用いられ得る。具体的な態様において、永久磁石、または電磁石などの他の磁場源がデバイス内に磁場を形成するために使用され得、これにより電流が流れる導体に選択的な偏力(J×B)を形成することができる。導体内の電流および/またはB場の強度は、この偏力を調整するために変更され得る。
【0008】
本無翼WHOMAV設計の物理的重量は、従来の有翼超小型飛行機(MAV)の重量と同等であってもよいが、本WHOMAVの態様は以下の3つの利点のうちの一つまたは複数の利点を提供し得る。第1に、内側面は動作を制御し得るが、内側面は、突風を受けることがなく、したがって、周囲流の非定常性による影響はきわめて少ない。第2に、内部コア部(internal core)および外側曲面は、垂直方向の加速度を操作することによって慣性を制御するために用いられ得る。第3に、中立の平衡状態にある円環盤(annular disc)への風荷重は最小値または最小値に近い。WHOMAVのボディは、様々な設計と形状を有し得る。具体的な態様において、ボディは風からの荷重を最小にするように設計される。ボディ設計の例は、円盤形状を含むがこれに限定されない。本発明の態様は、小型アクチュエータの使用など、エネルギー効率を改善する一つまたは複数のさらなる技法を組み入れことができる。態様は、操縦性と突風の許容範囲に応じて特有であってもよい。具体的な態様は、従来の翼を失速させかねない時間依存性の大規模剥離を十分に管理することができる。
【0009】
本発明による無翼設計は、現実的なMAVだけでなく、様々なさらなる用途に組み入れられ得るものである。流れ場の力学、電磁気的形態、および飛行力学への結果応答の間の相関を見つけるために、実験的試験と数値モデリングが使用され得る。重量および効率に関する数値最適化と試験は、設計を最適化するために実施され得る。無翼設計に用いられる揚力機構も、有翼MAVに組み入れられ得る。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて最小化され得る。流れ応答の検出には、非従来型のMEMSの局所的表面摩擦/せん断応力センサが使用されてもよい。環境風および/または突風から生じる可能性のある検出された流れ応答に応じて、電極の様々な組み換え(permutation)が駆動されて、検出された流れ応答に適合する力を形成し得る。
【図面の簡単な説明】
【0010】
【図1】従来の有翼超小型飛行機に関する飛行力学を示す。図1Aは、従来の翼型翼上の流れから生じる後曳き渦と、渦管の発生が羽ばたき翼による揚力を助ける例とを示し、図1Bは、羽ばたき翼による羽ばたきサイクル中の揚力の大きさと、この揚力の非定常性とを示す。
【図2A】標準的なRFグロー放電単層アクチュエータを示し、常誘電体の例を示す。
【図2B】標準的なRFグロー放電単層アクチュエータを示し、蠕動多相流量制御の例を示す。
【図2C】標準的なRFグロー放電単層アクチュエータを示し、標準単層設計を示す。
【図2D】標準的なRFグロー放電単層アクチュエータを示し、放電によって、弱い局所壁面空気噴流(U 約1〜2m/s)が誘導される様子を示す。
【図3A】静止ヘリウムガスのプラズマ駆動(plasma actuation)を示し、表面DBDを使用した流れ駆動の一態様の概略図を示す。
【図3B】静止ヘリウムガスのプラズマ駆動を示し、露出電極の近くの局所的ピークを表す。
【図3C】静止ヘリウムガスのプラズマ駆動を示し、異なる流れ方向に沿ったガス速度プロファイルを示す。
【図4A】数値シミュレーションの結果を示し、負電荷蓄積と、誘導体積力への電極形状の影響とを裏付ける誘電体上の空間電荷分布を示す。
【図4B】数値シミュレーションの結果を示し、位相ずれに起因する蠕動効果を裏付ける力と流れ付着の結果を示す。
【図5】本発明の一態様を示す。図5Aは、本発明の態様の概略図を示し、図5Bは、態様の電極配置を示す。
【図6A】本発明の一態様の表面に関する電極構造を示し、アクチュエータ性能を改良するための本態様の多層設計の概略図を示す。
【図6B】本発明の一態様の表面に関する電極構造を示し、どのように、定常放電が拡張領域において著しく大きい体積力を誘導し、結果として壁面噴流速度が可能な桁数だけ増大するかを示す。
【図6C】本発明の一態様の表面に関する電極構造を示し、拡張領域に大きな体積力を誘導するために使用され得る別の電極レイアウトを示す。
【図7】本開示の多層アクチュエータの第2の態様であって、層数を増加させたものの概略図を示す。
【図8】本発明による多層アクチュエータのさらにいくつかの例示的な態様を示す。
【図9】開口を通じて空気を流すことができる逆回転渦を生じさせるために用いられ得る電極構造を示す。
【図10】本発明による多重バリアプラズマアクチュエータ(MBPA)のいくつかの態様に対して予想される速度の増加を示す。
【図11】本発明による揚力増強のためのアクチュエータ設計の一態様の放電を示す。
【図12】推力増強のための幅広いグロー(約4cm)を示す、本発明によるアクチュエータの一態様の放電を示す。
【図13】プラズマの厚さを左手と比較して示す、本発明によるアクチュエータの一態様の横からの放電写真を示す。
【図14】本発明による非常に幅広い(約6cm)グローを有する新しいプラズマアクチュエータの一態様を示す。
【発明を実施するための形態】
【0011】
詳細な開示
本発明の態様は、無翼ホバリング超小型飛行機(WHOMAV)に関する。WHOMAVの態様は電源ユニット(PSU)を組み入れることができ、電源ユニットは、たとえば、バッテリ、または当技術分野において公知のその他の適切な電源を含み得る。態様は、ホバリングし、予想される突風に耐える適正な電力レベルで動作し得る。本発明の態様では、15cm未満の直径を有し得る。態様は、一つまたは複数の滑らかな(連続的な曲率の)表面を有してもよいし、かつ、電磁的および/または電気流体力学的原理を用いて動作してもよい。具体的な態様の無翼設計は、回転成分または移動成分のない動作を可能とし得る。さらなる態様では、周囲の流れ状態に能動的に応答し得る。層流境界層付着が不可能であることに起因する揚抗比の低下および翼効率低下の問題はまた、著しく低減されるか、または排除され得る。電磁力は、ポリマー絶縁体、誘電体、または絶縁特性を有するその他の材料によって分離された一組の接地電極と電源電極との間にパルス(交流/rf)電圧を印加することによって発生し得る。このような電極に印加される直流電流はまた、電磁力を提供するために用いられ得る。具体的な態様において、永久磁石、または電磁石などの他の磁場源がデバイス内に磁場を形成するために使用され得、これにより電流が流れる導体に選択的な偏力(J×B)を形成することができる。導体内の電流および/またはB場の強度は、この偏力を調整するために変更され得る。
【0012】
本無翼WHOMAV設計の物理的重量は、従来の有翼超小型飛行機(MAV)の重量と同等であってもよいが、本WHOMAVの態様は以下の3つの利点のうちの一つまたは複数の利点を提供し得る。第1に、内側面は動作を制御し得るが、内側面は、突風を受けることがなく、したがって、周囲流の非定常性による影響はきわめて少ない。第2に、内部コア部および外側曲面は、垂直方向の加速度を操作することによって慣性を制御するために用いられ得る。第3に、中立の平衡状態にある円環盤への風荷重は最小値であるかまたは最小値に近い。WHOMAVのボディは、様々な設計と形状を有し得る。ある具体的な態様において、ボディは風からの荷重を最小にするように設計される。ボディ設計の例は、円盤形状を含むがこれに限定されない。本発明の態様は、小型アクチュエータの使用など、エネルギー効率を改善するために一つまたは複数のさらなる技法を組み入れことができる。態様は、操縦性と突風の許容範囲に応じて特有であってもよい。具体的な態様は、従来の翼を失速させかねない時間依存性の大規模剥離を十分に管理することができる。
【0013】
本発明による無翼設計は、現実的なMAVだけでなく、様々なさらなる用途に組み入れられ得る。流れ場の力学、電磁気的形態、および飛行力学への結果応答の間の相関を見つけるために実験的試験と数値モデリングが使用され得る。重量および効率に関する数値最適化と試験が、設計を最適化するために実施され得る。無翼設計に用いられる揚力機構は、有翼MAVにも組み入れられ得る。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて最小化され得る。流れ応答の検出には、非従来型のMEMSの局所的表面摩擦/せん断応力センサが使用されてもよい。
【0014】
本発明の態様は電流力によって揚力を発生し得るものであり、電流力は所望の時間の間、局所的に安定化されて正確に制御され得る。航空宇宙用途において遭遇する速度領域のすべてではなくても、多くの速度領域において電流力を使用して流れ制御をすることでいくつかの利益が得られる。可動部品がないことおよび高速オン/オフ機能に加え、電磁気装置(electromagnetic device)は大きい力を比較的正確に加える能力を有する。最近の実験(Roth, 2003; Enloe et al., 2003)および数値的研究(Roy, 2005; Roy and Gaitonde, 2006a, b; Gaitonde et al., 2005, 2006)は、低速における無線周波数(rf)誘導誘電体バリア放電(DBD)の顕著な流れ制御効果を実証することに成功しており、本発明の態様に組み入れられ得るこのようなrf誘導誘電体バリア放電法の教示が参照により本明細書に組み入れられる。プラズマアクチュエータとも称されるこれらのrf誘導誘電体バリア放電デバイスは、適正な電力(ワット)で動作するが、効率的な制御のために大きいローレンツ力の誘起するのに必要な磁場を印加しなければならないような、比較的高い流速では性能が低下し、電力要件がkWまで増加する可能性がある(Miles, 2000; Leonov and Bityurin, 2002)。無翼設計を組み入れる本発明の態様は、以下の利点の一つまたは複数を提供し得る。(a)電力要件が著しく小さいこと、(b)乱流の痕跡を残す回転機構がないこと、および(c)精密制御によって適度な突風状態で十分な揚力と巡航速度を発生することである。より高い飛行速度を発生するためには、小さい磁場の印加が有利であり得る。電気的体積力qEが従来の有翼MAVの翼の代わりに使用され得る。
【0015】
図2は、低速におけるそれぞれ常誘電体(図2A)と蠕動(図2B)流れ加速とに対するkHzレベルのrf誘導大気グロー放電の概略図を示す。その例が図2Bに示される表面放電においては、一方の電極は一般的には流れ面に曝されており、他方の電極は絶縁体の層に埋め込まれて流れ面に曝された電極から流れの方向に少し離れた位置にある。この標準的な配置は単層設計と呼ばれる場合がある。一態様において、流れ面に曝された電極は、電極と流れ環境との間に誘電体コーティングを有してもよい。放電によって発生する電場は、この幾何学的非対称性と、電子およびイオンそれぞれの本質的に非常に異なる移動度に関連した非対称性との結果である。間欠放電によって発生される正味の力はイオン「風」を誘導するが、イオンニュートラル衝突移動機構は、所望される表面の壁面噴流のような効果を発生させる(Roy and Gaitonde, 2006; Roy et al., 2006)。
【0016】
これらの力に対する流体の応答は、遷移と乱流が支配的な状態では、複雑な形状を通過する流体の完全な流体方程式の解を必要とする(Gaitonde et al., 2005, 2006)。本発明者らは、Corkeら(2002)に基づくHultgrenおよびAshpis(AIAA-2003-1025)の標準的な単層設計を構築して(図2C)試験している(図2D)。放電は、小さい領域で体積力を誘導し、弱い壁面噴流を生じる(Anderson and Roy, AIAA-2006-369)。多層rf電源を電極に印加することにより、図2Bの右端に図式的に示されるように誘導速度をほぼ2倍にすることができる(Roth, 2003; Roy et al., 2006; Roy and Singh, 2006)。このような構造と多層rf電源は、本発明の態様に組み入れられ得る。しかし、これは適正な電力と高価な電源を必要とし得る。この設計は、kHzのrf電源を必要とし得、アークを発生し得る(図2Cの矢印参照)ので放電が不安定となる。
【0017】
図3は、電気力学的体積力qEが 静止状態のヘリウム作動ガスの中でさえも壁面噴流の誘導を通じて流れを能動的に制御する過程を示す(Roy, et al., APL, 2005)。図3Aは、表面DBDを使用した流れ駆動に関する概略図を示す。図3Bにおける電極誘電体表面を中心とした電気力(electric force)qEの変動は、5kHzにおいて1kVrmsのrf電圧が供給される露出電極の近くで局所的ピークを表わす。この力によって誘導される流れ方向のガス速度プロファイルは、静止ガス環境下において図3Cに種々の場所に沿って示される。
【0018】
電流力に起因する流れの制御への電気的パラメータおよび幾何学的パラメータの影響を理解するためにいくつかの研究がある(Roth, 2003; Enloe et al., 2003; Roy et al., 2006)。図4は、電極形状および電源位相に起因するこのような影響のシミュレーションの詳細を示す。半径が小さくなると、電場密度が高くなるためにより大きい力が誘導される(図4A)。また、電力を電極に特定の位相差で供給することにより、誘導力(induced force)が増強されて壁面噴流速度がほぼ2倍になる(図4B)。
【0019】
超小型飛行機の無翼ホバリングの態様は、飛行機のホバリングを可能にする十分な揚力を有し得る。翼を有する一般的な無人航空機(UAV)は、15cm未満の翼スパンを有する。本発明の態様は、15cmよりもさらに小さくてもよい。本発明によるWHOMAVの態様は滑らかで連続的な曲率の表面を有し得るし、電磁気学的技法を用いて提供される揚力を有し得る。WHOMAVの中心中空部にある表面誘電体バリア放電(DBD)に供給されるrf多相電源によって、渦巻状の流体柱が誘導され得る。rf多相電源を表面DBDに印加することにより、ホバリングまたは着陸に十分な上向きまたは下向きの力を形成することができる。WHOMAVの外面は、内円錐面と同様に、飛行機の操縦性を容易にすることができる。具体的な態様において、WHOMAVの公称巡航速度は約7〜10m/s(23〜33ft/s)である。本発明によるWHOMAVの様々な態様の無翼設計に関する、いくつかの利点がある。このような長所は、回転成分がないこと、移動成分がないこと、および周囲の流れ状態に能動的に応答することのうちの一つまたは複数を含むが、これらに限定されない。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて最小化され得る。層流境界層付着が不能であることに起因する揚抗比の低下および翼効率低下の問題はまた、実質的に低減されるか、または排除され得る。
【0020】
本発明の態様によるWHOMAVの基本形状は、内側開口および外面に沿って角形曲面形状(angularly curved shape)を有する中空ドーナツ状であってもよい。高速上昇運動のために、および緩やかに着陸する場合に下降運動を遅らせるために、円錐形は、流体加速によって揚力を増強することができる。このような同軸デバイスの概略図が図5Aに示される。WHOMAVを貫通する開口を形成する内面は、デバイス最上部の開口の直径がデバイス最下部の開口の直径よりも小さくなるように傾斜されてもよい。一態様において、WHOMAVは3cmより大きい内径、11cm未満の外径、および5cm未満の高さを有する。さらなる態様は、周辺に沿った不連続な円形電極など、他の電極構成を用い得る。図5Aおよび5Bに示されるWHOMAVの態様の一般的な内部および外部の平均寸法は、公称高さ4cmでそれぞれ4cmおよび10cmであってもよい。デバイスは、重量を軽減して構造的剛性を増加するために中空シェルとして設計され得る。中空シェルは電源ユニットを受け入れるのにも役立ち得る。具体的な態様において、中空ボディには、デバイスが中にある環境流体とは異なる流体が満たされ得る。例には、デバイスを上昇させやすくするために、空気よりも軽い流体などの、環境流体よりも軽い流体が含まれるがこれらに限定されない。デバイスのボディには、炭素系の材料、プラスチック、バルサ材などの木材、金属、可撓性材料、および誘電材料を含む、様々な材料が使用され得るが、これらに限定されない。
【0021】
図5Aを参照すると、3つの同心の不連続な円形電極60、62、および64があり、これらは上面76にある開路(break)66によって不連続な部分に分割される。これらの同心電極60、62、および64は、電極の駆動によってWHOMAVの中心に向かって、あるいはWHOMAVの中心から離れる方向に放射状流れが生じるように、図6Aに示される電極とほぼ同様に、上面76を生成するボディ層、および/または下層74を生成するボディ層に対して配置され得る。
【0022】
デバイスの周辺に設置された種々のセグメントを種々の駆動電圧で駆動することにより、デバイスの水平移動が助けられるように、正味の力を一方向にすることができる。流れを増強するために、さらなる不連続同心電極が上面76に設置され得る。さらなる態様において、本開示を通じて開示されているように、3つよりも多くの電極を1組とする電極の組も用いられ得る。態様はまた、揚力または下向きの力が生じるように、内面72および/または外面70に不連続円形電極を組み入れることができる。内面および/外面にある円形電極の組は、必要に応じて連続的であり得る。
【0023】
図5Bを参照すると、図6Aに示される電極とほぼ同様に、デバイスの内面72と外面70に設置された複数組の電極80、82、および84が示されている。内面および/または外面にある複数組の電極を駆動することにより、参照符号76および78などの円形流れを生じさせることができ、これは回転壁面噴流を形成してWHOMAVのボディを回転させ得る。さらなる態様において、本開示を通じて開示されているように、3つよりも多くの電極を1組とする電極の組も用いられ得る。態様はまた、円形流れが生じかつ/あるいはデバイスを回転させるようにデバイスの上面および/または下面にこのような組の電極を組み入れることができる。これらの電極の組は、デバイスを水平方向に移動させ、かつ/あるいは検出された風または突風の影響を弱める流れが生じるように選択的に駆動され得る。
【0024】
別の態様において、サイズは容易に拡大または縮小され、他の形状が実施され得る。同軸形状において、内面および外面には、電極層がコーティングされ得る。これらの電極は、たとえば、セラミックまたはポリマー絶縁スリーブを用いて選択的に露出され、またはコーティングされる。図5Aに示される態様に対する電極の配置が図5Bに示される。一態様において、一連の多層アクチュエータが用いられ得る。代表的な多層設計の概略図が図6Aに示される。この配置は、平板上の単一アクチュエータに対して60Hzの周波数の電源を用いて試験されている。得られた放電は、安定しており、ほぼ4倍強力なピークの壁面噴流を生じさせる作用面(work surface)(図6B参照)にわたる、より大きい領域に及んでいる。図6Aにおけるa、b、およびcなどの物理的パラメータは、アクチュエータの所望の性能に対して最適化され得る。
【0025】
一態様において、図6Aに示されるアクチュエータの電極は、選択された位相差で電力供給される。低いmA領域の電流と数百ボルトrmsの電位差が電極間に印加される場合、106〜107V/cmの電場によって密度が1012〜1013cm-3のグロー(微小)放電プラズマが発生する。このプラズマの厚さは、数デバイ長、すなわち、数mm〜1mm未満の範囲にある。誘導されるqEの力は非常に局所的であるが、この体積力のローレンツ相互作用は、周囲流体と共に、デバイスの円錐内面および外面に沿って回転して徐々に加速する壁面噴流を生じさせる。この回転壁面噴流は、強度Γの渦を誘導する。一般化されたKutta-Joukowskiの定理は、
で示され、ここで、FはUの自由流におけるn個の渦によって発生する、システムへの合力である。したがって、以下に説明される流れ制御機構を用いてホバリングのための十分な揚力が発生し得る。電極は、強制循環Γが維持され得るように配置され得る。一態様において、図5Aに示される電極の多層配置が用いられ得、それにより以下に説明される流れ制御機構によって最大7〜10m/sの水平誘導速度が得られ得る。
【0026】
パッシェンの法則は、作動媒体中のイオン化に最もエネルギー効率の良い点がストルトウ(Stoletow)点であると結論づけている。空気の場合、360Vの最小絶縁破壊電圧およびガス圧力と電極間距離との積p.d=5.7Torr-mmが、最大のイオン化に要求される。流れ制御の場合、大気圧に近い用途では、最大容量イオン化(maximum volumetric ionization)に必要な許容電極間隔は、d=77μmである。多層マイクロアクチュエータ設計を用いる態様は、このような電極間隔を実現し得る。単層アクチュエータの代替として、多層アクチュエータが用いられ得る。多層アクチュエータは、各々が一つの電極を包囲する複数の誘電体層を有し得る。
【0027】
図6Aは二層態様の概略図を示す。一態様において、電極間距離dは、数μmに保たれてkHzのrf電力要件を緩和するか、あるいは排除する。電圧10が電極2と電極4との間に印加され、電圧20が電極6と電極4との間に印加される。図6Bに示される試験の場合、電極は、ネオントランスを介してコンセントの交流電源(60Hz)から電力供給され、図1に示される単層設計よりもはるかに大きい幅にまで及ぶ定常グローに関して試験される。測定値は、誘導された噴流速度が少なくとも4倍(約4U)増加していることを示す。一態様において、パルス交流/直流電源から電力供給される1組の位相遅延された電極が使用され得る。このような1組の位相遅延された電極からの誘導壁面噴流は、最大約7〜10m/sまで1桁改善され得る。このような誘導壁面噴流の大きさは、本WHOMAVの態様の適正な巡航速度に対して十分であり得る。図6Cは、図6Aの態様に類似した態様であって、流れを増強するために、電極2および6とは位相がずれた接地電極4に対して駆動され得る、追加電極7を有するものを示す。
【0028】
図7は、多層配置の場合のきわめて大きい加速ゲイン(acceleration gain)(すなわち、>15Uの誘導速度)を示す。電圧パターン15は表面に最も近い電極11と接地電極13との間に印加されるが、電圧パターン16は電極12と接地電極13との間に印加される。これは、単層配置と同じプラズマエネルギー密度に対して実現されてもよい。さらなる態様においては、プラズマコーティングされた表面積を増すために層数を増加することができる。つまり、より大きいEHD体積力が得られ、結果としてより大きいガス速度が誘導される。また、この速度においては、小規模乱流が流れ駆動過程を支配する場合がある。さらに、μmレベルの絶縁体の厚さが誘導力に影響を与える場合がある。電極は、様々な流れパターンを誘導するために、それぞれ様々な構成とパターンで設置されて駆動され得る。例として図9に示されるように、大きい逆回転渦または小さい逆回転渦を形成するために流れ駆動を使用することができる。加えられた位相差に基づいて、これらの逆回転渦管の位置をわずかにまたは大きくずらすことができる。図9は開口37を示しており、この開口は逆回転渦管が開口37を通る流れを駆動するような、たとえば、デバイスの開口68であってもよい。一態様において、種々のボディ形状の周辺に生成するものと類似した様々な渦構造を形成することができる。たとえば、選択されたデューティサイクルで、π/2の位相差で動作する電極の組に対して、円柱状物体上を流れるカルマン渦列を容易に発生させることができる。合成噴流の代わりに有力な代替(alternative)もまたこの設計において実施することができる。
【0029】
図8は、本発明による多層アクチュエータのさらにいくつかの例示的な態様を示し、様々な幾何学的および電気的構成を示す。誘電材料内部の熱損失を最小限に抑えるために、たとえば、KAPTON(商標)およびTEFLON(商標)、これらの組合せなど、様々な絶縁体材料が用いられ得る。本発明の多層アクチュエータは、任意の数の絶縁層、絶縁材厚さ、絶縁耐力、電極数、電極幅、電極間ギャップ、印加周波数、デューティサイクル、および電圧などを有してもよい。図10は、本発明による多重バリアプラズマアクチュエータ(MBPA)の態様に対して推定される速度の増加を示す。図11は、本発明による揚力増強のためのアクチュエータ設計の一態様の放電を示す。図12は、推力増強のための幅広いグロー(約4cm)を示す、一態様のアクチュエータの放電を示す。図13は、本発明の一態様の側面からの放電写真を示すものであってプラズマの厚さを左手と比較して示す。図14は、本発明による非常に幅広い(約6cm)グローを有するプラズマアクチュエータの一態様を示す。
【0030】
従来の有翼MAVでは、操縦翼面が吹きさらしであり、したがって、飛行体の飛行速度に匹敵する速度の突風に対して非常に敏感である。本WHOMAVの態様では、従来のMAVの物理的重量と同様の物理的重量を有し得る。本WHOMAVは2つの大きな長所を有し得る。第1に、本WHOMAVは突風を受けない内側面を有し、したがって、周囲流の非定常性による影響はきわめて少ない。第2に、この面は、垂直方向の加速度を操作することによって慣性を制御するためにも用いられ得る。従来のMAVに関する電力管理技術を、本WHOMAVの具体的な態様に組み入れることができる。エネルギー効率もまた、小型アクチュエータを用いて改善することができる。突風を受けない内側面の組入れは、垂直方向の加速度を操作することによって慣性を制御するためにも用いられ得るもので、これにより操縦性が得られ、突風が許容され、これにより一般的に従来のMAV翼を失速させるような時間依存性の大規模剥離の管理が可能となる。さらに、MAVに関連する低レイノルズ数状態での剥離流は、フィードバック機構による電気力学的体積力の精密制御を用いて低減または最小化され得る。本WHOMAVの態様に従った流れ応答の検出には、非従来型のMEMSの局所的表面摩擦/せん断応力センサも使用され得る。
【0031】
一態様においては、電極を高圧電源と計器につないで、動作を正確に監視し、どのような条件で離昇するのかを判断定することができる。さらなる態様において、円形飛行機(circular plane)の外側面の周囲にさらに多くの電極が取り付けられてもよい。これらの電極も、高圧電源に接続されて、水平方向の移動し得る。気体流の速度と温度は、円形デバイスが空中に浮かんでいる間に計器によって監視され得る。実験データが取得されて見直され、それによりデバイスの所望の垂直上昇と水平移動に最小量の電力が使用されるよう、電極位置が最適化され得る。
【0032】
別の態様において、WHOMAVの全体的な質量を著しく増加させることなく、電源は、WHOMAVの中に設置される。具体的な態様において、これはMOSFETベースの駆動回路技術により、エポキシ樹脂に封入された高圧電源を用いて実現され得る。
【0033】
本明細書において言及または引用されたすべての特許、特許出願、仮出願、および刊行物は、すべての図および表を含む全体が、本明細書の明示的教示と矛盾しない範囲で、参照により本明細書に組み入れられる。
【0034】
本明細書に記載された実施例および態様は例示のみを目的としており、上記実施例および態様を考慮した様々な修正態様または変更態様が当業者に示唆されるものと考えられ、本出願の精神と範囲内に含まれるべきであることを理解されたい。
【0035】
参照文献
【特許請求の範囲】
【請求項1】
貫通する開口を有するボディと、
RF電圧が各電極対に印加される場合に、各電極対が表面近くの体積力を発生させるプラズマアクチュエータを形成するように、該ボディの表面に近接して設置される複数の電極対と、
各電極対にパルスRF電圧を印加するRF電圧源であって、該複数の電極対の各々からの該表面近くの体積力の蓄積効果が、該開口内に渦巻状の流体柱を形成し、該流体柱が超小型飛行機をホバリングさせる、RF電圧源と、
を含む、ホバリング超小型飛行機。
【請求項2】
ボディが円盤形状を有する、請求項1記載のホバリング超小型飛行機。
【請求項3】
ボディが15cm未満の外径を有する、請求項1記載のホバリング超小型飛行機。
【請求項4】
RF電圧が各電極対に印加される場合に、各電極対が表面近くの体積力を発生させるプラズマアクチュエータを形成するように、ボディの表面に近接して設置される第2の複数の電極対であって、該第2の複数の電極対の各々からの該表面近くの体積力の蓄積効果が垂直方向の力を形成する、第2の複数の電極対をさらに含む、請求項1記載のホバリング超小型飛行機。
【請求項5】
複数の電極対がボディの表面の内側部分に近接して設置され、
該ボディの表面の該内側部分が該ボディを貫通する開口に向いている、
請求項1記載のホバリング超小型飛行機。
【請求項6】
第2の複数の電極対がボディの表面の外側部分に近接して設置され、
該ボディの表面の外側部分が超小型飛行機から半径方向外側に向く、
請求項1記載のホバリング超小型飛行機。
【請求項7】
周囲流の状態を測定するための一つまたは複数のセンサをさらに含む、請求項1記載のホバリング超小型飛行機。
【請求項8】
円盤形状ボディが、中立の平衡状態にある超小型飛行機への風荷重が最小値あるいは最小値近くになるような形状にされる、請求項2記載のホバリング超小型飛行機。
【請求項9】
円盤形状ボディが11cm未満の外径を有する、請求項2記載のホバリング超小型飛行機。
【請求項10】
開口が3cmより大きい直径を有する、請求項1記載のホバリング超小型飛行機。
【請求項11】
ボディが5cm未満の高さを有する、請求項1記載のホバリング超小型飛行機。
【請求項12】
ボディが中空部分を含む、請求項1記載のホバリング超小型飛行機。
【請求項13】
ボディの中空部分は空気よりも軽い流体で満たされる、請求項12記載のホバリング超小型飛行機。
【請求項14】
少なくとも2つの電極対が接地電極を共有する、請求項1記載のホバリング超小型飛行機。
【請求項15】
複数の電極対に電力供給する電源ユニットをさらに含む、請求項1記載のホバリング超小型飛行機。
【請求項16】
電源ユニットがボディ内に設置される、請求項15記載のホバリング超小型飛行機。
【請求項17】
各電極対が接地電極と露出電極とを含み、
該露出電極がボディの表面に設置される、
請求項1記載のホバリング超小型飛行機。
【請求項18】
各電極対が一つまたは複数の追加電極をさらに含み、
該電極対の該一つまたは複数の追加電極と接地電極との間に、対応する一つまたは複数の追加RF電圧が印加される場合に、該一つまたは複数の追加電極の各々が、表面近くの体積力を発生させるプラズマアクチュエータを形成する、
請求項17記載のホバリング超小型飛行機。
【請求項19】
一つまたは複数の追加RF電圧がRF電圧と位相がずれている、請求項18記載のホバリング超小型飛行機。
【請求項20】
電極対および一つまたは複数の追加電極が不連続な円形電極の組の一部分を形成する、請求項18記載のホバリング超小型飛行機。
【請求項1】
貫通する開口を有するボディと、
RF電圧が各電極対に印加される場合に、各電極対が表面近くの体積力を発生させるプラズマアクチュエータを形成するように、該ボディの表面に近接して設置される複数の電極対と、
各電極対にパルスRF電圧を印加するRF電圧源であって、該複数の電極対の各々からの該表面近くの体積力の蓄積効果が、該開口内に渦巻状の流体柱を形成し、該流体柱が超小型飛行機をホバリングさせる、RF電圧源と、
を含む、ホバリング超小型飛行機。
【請求項2】
ボディが円盤形状を有する、請求項1記載のホバリング超小型飛行機。
【請求項3】
ボディが15cm未満の外径を有する、請求項1記載のホバリング超小型飛行機。
【請求項4】
RF電圧が各電極対に印加される場合に、各電極対が表面近くの体積力を発生させるプラズマアクチュエータを形成するように、ボディの表面に近接して設置される第2の複数の電極対であって、該第2の複数の電極対の各々からの該表面近くの体積力の蓄積効果が垂直方向の力を形成する、第2の複数の電極対をさらに含む、請求項1記載のホバリング超小型飛行機。
【請求項5】
複数の電極対がボディの表面の内側部分に近接して設置され、
該ボディの表面の該内側部分が該ボディを貫通する開口に向いている、
請求項1記載のホバリング超小型飛行機。
【請求項6】
第2の複数の電極対がボディの表面の外側部分に近接して設置され、
該ボディの表面の外側部分が超小型飛行機から半径方向外側に向く、
請求項1記載のホバリング超小型飛行機。
【請求項7】
周囲流の状態を測定するための一つまたは複数のセンサをさらに含む、請求項1記載のホバリング超小型飛行機。
【請求項8】
円盤形状ボディが、中立の平衡状態にある超小型飛行機への風荷重が最小値あるいは最小値近くになるような形状にされる、請求項2記載のホバリング超小型飛行機。
【請求項9】
円盤形状ボディが11cm未満の外径を有する、請求項2記載のホバリング超小型飛行機。
【請求項10】
開口が3cmより大きい直径を有する、請求項1記載のホバリング超小型飛行機。
【請求項11】
ボディが5cm未満の高さを有する、請求項1記載のホバリング超小型飛行機。
【請求項12】
ボディが中空部分を含む、請求項1記載のホバリング超小型飛行機。
【請求項13】
ボディの中空部分は空気よりも軽い流体で満たされる、請求項12記載のホバリング超小型飛行機。
【請求項14】
少なくとも2つの電極対が接地電極を共有する、請求項1記載のホバリング超小型飛行機。
【請求項15】
複数の電極対に電力供給する電源ユニットをさらに含む、請求項1記載のホバリング超小型飛行機。
【請求項16】
電源ユニットがボディ内に設置される、請求項15記載のホバリング超小型飛行機。
【請求項17】
各電極対が接地電極と露出電極とを含み、
該露出電極がボディの表面に設置される、
請求項1記載のホバリング超小型飛行機。
【請求項18】
各電極対が一つまたは複数の追加電極をさらに含み、
該電極対の該一つまたは複数の追加電極と接地電極との間に、対応する一つまたは複数の追加RF電圧が印加される場合に、該一つまたは複数の追加電極の各々が、表面近くの体積力を発生させるプラズマアクチュエータを形成する、
請求項17記載のホバリング超小型飛行機。
【請求項19】
一つまたは複数の追加RF電圧がRF電圧と位相がずれている、請求項18記載のホバリング超小型飛行機。
【請求項20】
電極対および一つまたは複数の追加電極が不連続な円形電極の組の一部分を形成する、請求項18記載のホバリング超小型飛行機。
【図1】

【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図5】
【図6A】
【図6B】
【図6C】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図5】
【図6A】
【図6B】
【図6C】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公表番号】特表2009−545487(P2009−545487A)
【公表日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願番号】特願2009−523018(P2009−523018)
【出願日】平成19年7月31日(2007.7.31)
【国際出願番号】PCT/US2007/074874
【国際公開番号】WO2008/016928
【国際公開日】平成20年2月7日(2008.2.7)
【出願人】(507371168)ユニバーシティ オブ フロリダ リサーチ ファンデーション インコーポレーティッド (38)
【公表日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願日】平成19年7月31日(2007.7.31)
【国際出願番号】PCT/US2007/074874
【国際公開番号】WO2008/016928
【国際公開日】平成20年2月7日(2008.2.7)
【出願人】(507371168)ユニバーシティ オブ フロリダ リサーチ ファンデーション インコーポレーティッド (38)
[ Back to top ]