
超電導回転電機駆動制御システム
【課題】高効率化及び小型軽量化を図った超電導回転電機駆動制御システムを提供する。
【解決手段】本発明の一態様に係る超電導回転電機駆動制御システムは、If2を同期型回転電機の超電導界磁巻線に通電される界磁電流、Iを線電流、E2を同期型回転電機の誘導起電力、Vtを端子電圧、k4を定数、n2を超電導界磁巻線の巻線数、νを同期型回転電機の回転速度、θを力率角、r2を同期型回転電機の抵抗、x2を同期型回転電機のリアクタンスとすると、同期型回転電機と電力装置との間で授受される電力の変動に応じて、超電導界磁巻線に通電される界磁電流If2が以下の式

を満足するように制御を行う統合制御装置を備えるものである。
【解決手段】本発明の一態様に係る超電導回転電機駆動制御システムは、If2を同期型回転電機の超電導界磁巻線に通電される界磁電流、Iを線電流、E2を同期型回転電機の誘導起電力、Vtを端子電圧、k4を定数、n2を超電導界磁巻線の巻線数、νを同期型回転電機の回転速度、θを力率角、r2を同期型回転電機の抵抗、x2を同期型回転電機のリアクタンスとすると、同期型回転電機と電力装置との間で授受される電力の変動に応じて、超電導界磁巻線に通電される界磁電流If2が以下の式
を満足するように制御を行う統合制御装置を備えるものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、低速大トルクが要求される船舶を中心に、風力、鉄道、自動車、電力・産業用補機等に用いられる超電導回転電機駆動制御システムに関する。
【背景技術】
【0002】
最近、スーパーエコシップと呼ばれる環境負荷対応型の電気推進システムを備える船舶が注目されている。これは、新型の船型、二重反転プロペラ及び電気推進システムの採用による配置自由度を活用した新しいコンセプトの船舶であり、採用されている上記技術の効果により普及促進が図られている。
【0003】
図5は、スーパーエコシップに備えられる電気推進システムの構成を示すブロック図である。
【0004】
この電気推進システムは、回転電機1と、直流電力を供給する電源装置3と、電源装置3から供給される直流電力を交流電力に変換して回転電機1に供給するインバータ等の電力変換装置5と、回転電機1に直結された推進プロペラ6と、回転電機1に界磁電流を供給する界磁電源7とを備えている。
【0005】
回転電機1には、高効率を得るために、回転界磁巻線1aと固定電機子巻線1bとを備えた同期型モータが使用され、電源装置3には、通常、発電機3aと原動機3bとを結合したものが使用される。
【0006】
推進プロペラの推進力を増減させるために原動機の出力を増減させる在来型の直結型推進機と異なり、図5に示す電気推進システムは、原動機(図5には図示せず。図6参照。)を常時最高出力で稼働させる一方、回転電機1に供給する電力を電力変換装置5によって増減させることにより推進プロペラの推進力を増減させる。
【0007】
即ち、電気推進システムにおいては、原動機の出力は常時一定に保持されるので、在来型の直結型推進機に比して、排出される二酸化炭素等の有害物質の量を大幅に抑制し、環境への悪影響を低減することができるという利点を有している。
【0008】
しかし、電気推進システムは、在来型の直結型推進機とは異なり、モータ、発電機、電力変換装置を使用するため、最終的な伝達効率が在来型の直結型推進機よりも低いという欠点を有している。
【0009】
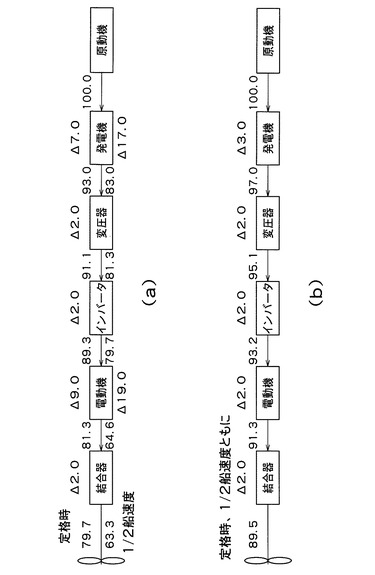
図6(a)は、図5に示す従来の電気推進システムの伝達効率を示す簡易ブロック図である。図6(a)において、記号△が付された数値は損失(%)を示し、記号△が付されていない数値は伝達効率(%)を示している。また、上段の数値は、定格時の伝達効率(%)を示し、下段の数値は、1/2船速時の伝達効率(%)を示している。
【0010】
図6(a)に示されるように、定格時79.7%、1/2船速時63.3%という伝達効率は、省エネルギーの観点から充分な高さとは言えない。
【0011】
この伝達効率の低さは、主として、発電機、モータ等の回転電機の伝達効率の低さに起因している。
【0012】
従って、発電機、モータ等の回転電機の伝達効率の向上を図ることにより、電気推進システム全体としての伝達効率の向上を図ることが求められている。
【0013】
図5の回転電機1を風力用発電機として用いる場合には、電力装置2として、電源装置3ではなく、産業用モータや一般電力用電源装置等の負荷装置4が接続されることとなるが、その場合にも、低速大トルクが要求されることから、発電機、モータ等の回転電機の伝達効率の低さの改善が課題となる。
【0014】
船舶用電気推進モータや風力用発電機のように低速大トルクが要求される場合には、誘導起電力が小さいために低電圧・大電流回転電機となる。
【0015】
従って、図5に示す従来の電気推進システムでは、電機子電流の増大に伴って銅損が増加し、伝達効率が大幅に低下する。また、電機子巻線の発熱量が増大するので、冷却装置を大型化しなければならないという欠点も生じる。
【0016】
そこで、伝達効率の向上と冷却の容易化のために、電機子巻線の電流密度を下げる対策が採られる場合もあるが、その場合には回転電機が大型化するので、その対策には限界がある。
【0017】
尚、従来の技術においては、電源容量を増大することなく、高出力化を図ることを意図したモータの発明が提案されているが(例えば、特許文献1参照)、伝達効率の低さの問題を解決するものではない。
【特許文献1】特開2005−237175号公報
【発明の開示】
【発明が解決しようとする課題】
【0018】
本発明の目的は、高効率化及び小型軽量化を図った超電導回転電機駆動制御システムを提供することである。
【課題を解決するための手段】
【0019】
本発明に係る超電導回転電機駆動制御システムの第1の態様によれば、
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
上記同期型回転電機に電力を供給する電源装置、又は、上記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
上記同期型回転電機と上記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
上記同期型回転電機に界磁電流を供給する界磁電源と、
上記界磁電源から上記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
上記超電導界磁巻線と上記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
上記超電導界磁巻線及び上記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
上記同期型回転電機が同期型モータとして使用される場合に、
If2を上記超電導界磁巻線に通電される界磁電流、Iを線電流、E2を上記同期型回転電機の誘導起電力、Vtを端子電圧、k4を定数、n2を上記超電導界磁巻線の巻線数、νを上記同期型回転電機の回転速度、θを力率角、r2を上記同期型回転電機の抵抗、x2を上記同期型回転電機のリアクタンスとすると、
上記統合制御装置は、上記同期型回転電機と上記電力装置との間で授受される電力の変動に応じて、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(11)
【数1】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システムが提供される。
【0020】
本発明に係る超電導回転電機駆動制御システムの第1の態様において、上記統合制御装置は、上記同期型回転電機の上記誘導起電力E2と上記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(16)
【数2】
を満足するように制御を行うこととするとよい。
【0021】
又は、本発明に係る超電導回転電機駆動制御システムの第1の態様において、上記統合制御装置は、上記同期型回転電機の力率が常に1(cosθ=1)になるように、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(18)
【数3】
を満足するように制御を行うこととするとよい。
【0022】
本発明に係る超電導回転電機駆動制御システムの第2の態様によれば、
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
上記同期型回転電機に電力を供給する電源装置、又は、上記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
上記同期型回転電機と上記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
上記同期型回転電機に界磁電流を供給する界磁電源と、
上記界磁電源から上記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
上記超電導界磁巻線と上記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
上記超電導界磁巻線及び上記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
上記同期型回転電機が同期型モータとして使用される場合に、
If1,If2を上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される界磁電流、Iを線電流、E1,E2を上記電源装置、上記同期型回転電機のそれぞれの誘導起電力、Vtを端子電圧、k3,k4を定数、n1,n2を上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれの巻線数、νを上記同期型回転電機の回転速度、θを力率角、r1,r2を上記電源装置、上記同期型回転電機のそれぞれの抵抗、x1,x2を上記電源装置、上記同期型回転電機のそれぞれのリアクタンスとすると、
上記統合制御装置は、上記同期型回転電機と上記電力装置との間で授受される電力の変動に応じて、上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される上記界磁電流If1,If2が以下の式(11)及び式(12)
【数4】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システムが提供される。
【0023】
本発明に係る超電導回転電機駆動制御システムの第2の態様において、上記統合制御装置は、上記同期型回転電機の上記誘導起電力E2と上記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される上記界磁電流If1,If2が以下の式(16)及び式(17)
【数5】
を満足するように制御を行うこととするとよい。
【0024】
又は、本発明に係る超電導回転電機駆動制御システムの第2の態様において、上記統合制御装置は、上記同期型回転電機の力率が常に1(cosθ=1)になるように、上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される上記界磁電流If1,If2が以下の式(18)及び式(19)
【数6】
を満足するように制御を行うこととするとよい。
【0025】
本発明に係る超電導回転電機駆動制御システムの第3の態様によれば、
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
上記同期型回転電機に電力を供給する電源装置、又は、上記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
上記同期型回転電機と上記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
上記同期型回転電機に界磁電流を供給する界磁電源と、
上記界磁電源から上記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
上記超電導界磁巻線と上記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
上記超電導界磁巻線及び上記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
上記同期型回転電機が発電機として使用される場合に、
If2を上記超電導界磁巻線に通電される界磁電流、Iを線電流、Vtを端子電圧、k4を定数、n2を上記超電導界磁巻線の巻線数、νを上記同期型回転電機の回転速度、θを力率角、r2を上記同期型回転電機の抵抗、x2を上記同期型回転電機のリアクタンスとすると、
上記統合制御装置は、上記同期型回転電機と上記電力装置との間で授受される電力の変動に応じて、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(20)
【数7】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システムが提供される。
【0026】
本発明に係る超電導回転電機駆動制御システムの上記各態様において、上記電源装置は、銅発電機又は超電導発電機と原動機とを結合したものであるものとするとよい。
【0027】
また、少なくとも上記同期型回転電機側の巻線として超電導巻線を備え、電圧を可変調整する超電導変圧器を、上記同期型回転電機と上記電機子側電力変換装置との間にさらに備えるものとするとよい。
【0028】
また、上記超電導変圧器の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えるものとするとよい。
【0029】
また、回転子側に超電導コイルを備え、電圧を可変調整する回転変圧器を含む誘導集電装置を、上記界磁電源と上記界磁側電力変換装置との間にさらに備えるものとするとよい。
【0030】
また、上記誘導集電装置の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えるものとするとよい。
【0031】
上記誘導集電装置の回転子側に備えられた上記電力変換装置は、AC/DC変換装置であるものとするとよい。
【0032】
本発明に係る超電導回転電機駆動制御システムの上記各態様において、上記同期型回転電機に結合されるプロペラをさらに備えるものとするとよい。
【発明の効果】
【0033】
本発明に係る超電導回転電機駆動制御システムの一態様は、上記構成により、高効率化及び小型軽量化を図った超電導回転電機駆動制御システムを提供することができる。即ち、負荷変動等の運転条件の変化に対しても常に低電圧かつ大電流の電力により高効率かつ高力率の運転制御が可能な小型軽量の超電導回転電機駆動制御システムを提供することができる。
【発明を実施するための最良の形態】
【0034】
以下、本発明の実施の一形態に係る超電導回転電機駆動制御システムについて、図面を参照しながら詳細に説明する。
【0035】
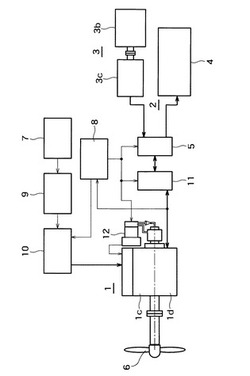
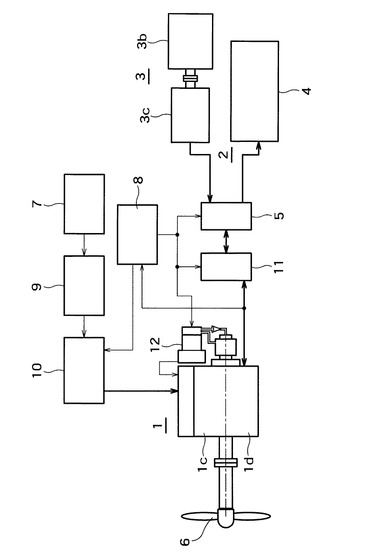
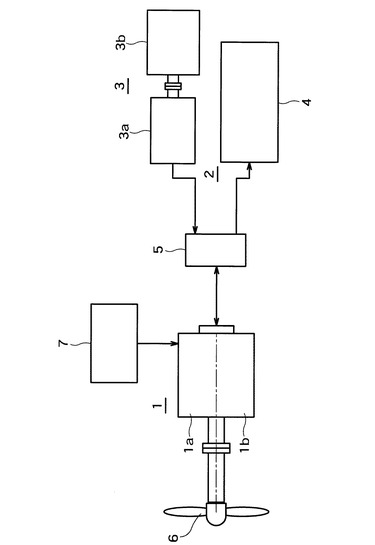
図1は、本発明の実施の一形態に係る超電導回転電機駆動制御システムの構成を示すブロック図である。
【0036】
本発明の実施の一形態に係る超電導回転電機駆動制御システムは、超電導界磁巻線1cと銅電機子巻線又は超電導電機子巻線1dとを含む同期型回転電機1と、同期型回転電機1に電力を供給する電源装置3又は同期型回転電機1から電力の供給を受ける負荷装置4として備えられる電力装置2と、同期型回転電機1と電力装置2との間で授受される電力の変換を行うインバータ、コンバータ又はサイクロコンバータ等の電機子側電力変換装置5と、同期型回転電機1に界磁電流を供給する界磁電源7と、界磁電源7から超電導界磁巻線1cに供給される電流を制御するインバータ、コンバータ又はサイクロコンバータ等の界磁側電力変換装置10と、超電導界磁巻線1cと銅電機子巻線又は超電導電機子巻線1dとに流れる直流又は交流の電流を協調して制御する統合制御装置8と、超電導界磁巻線1c及び超電導電機子巻線1dを極低温に冷却する冷凍装置12と、を備えている。
【0037】
統合制御装置8は、同期型回転電機1と電力装置2との間で授受される電力の変動、即ち、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が後述の式(11)を満足するように制御を行う。従って、同期型回転電機1と電力装置2との間で授受される電力の値が統合制御装置8にフィードバックされている。
【0038】
同期型回転電機1には、例えばプロペラ6が結合される。
【0039】
電源装置3には、通常、銅発電機又は超電導発電機3cと原動機3bとを結合したものが使用される。
【0040】
尚、後述するように、界磁電源7と界磁側電力変換装置10との間に電圧を可変調整する回転変圧器式の誘導集電装置9を、また、同期型回転電機1と電機子側電力変換装置5との間に電圧を可変調整する超電導変圧器11を、それぞれ配設することが望ましい。超電導変圧器11は、少なくとも同期型回転電機1側の巻線として超電導巻線を有するものとし、電機子側電力変換装置5側の巻線は超電導巻線でも銅巻線でもよい。また、後述するように、超電導変圧器11の回転子側又は固定子側に、電力変換装置をさらに備えるものとするとよい。
【0041】
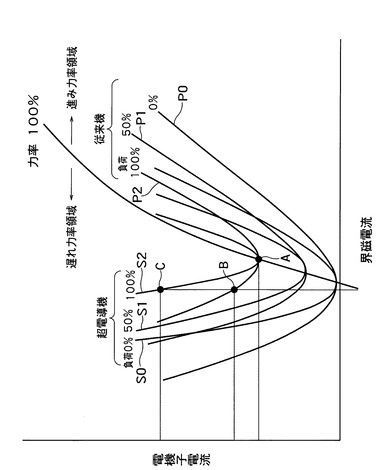
図2は、界磁電流に対する電機子電流の関係を表すV特性を超電導機及び従来機について示すグラフである。グラフ中の曲線S0,S1,S2は、負荷0%、50%、100%のときの超電導機のV特性を示し、曲線P0,P1,P2は、負荷0%、50%、100%のときの従来機のV特性を示している。
【0042】
図2のグラフに示すように、いずれの場合においても、力率100%のときに電機子電流は最小値となり望ましい。
【0043】
しかし、各曲線は、界磁電流を増大させると進み力率領域に移動し、界磁電流を減少させると遅れ力率領域に移動し、電機子電流は、進み力率領域及び遅れ力率領域のいずれにおいても増大する。
【0044】
また、負荷が0%→50%→100%と増加するにつれて電機子電流は、超電導機及び従来機のいずれの場合も増大し、力率は変化する。
【0045】
従来機の場合は、界磁電流の変化に対して電機子電流は緩やかに変化するため、各曲線P0,P1,P2で示されるように、V曲線は緩やかになる。
【0046】
一方、超電導機の場合は、同期リアクタンスが小さいために、界磁電流の変化に対して電機子電流は急激に変化し、各曲線S0,S1,S2で示されるように、V曲線は非常に急峻となる。
【0047】
一定界磁電流の場合に、0%から100%への負荷変動が生じると、動作点が、従来機ではB点、超電導機ではC点に移動する。
【0048】
力率100%を維持するためには、動作点をA点に制御する必要がある。従来機の場合、(B点での電機子電流)/(A点での電機子電流)=1.2(倍)と電機子電流の増加量が小さいため、実質的に界磁電流を制御する必要がない。
【0049】
しかし、超電導機の場合、(C点での電機子電流)/(A点での電機子電流)=2.0(倍)と電機子電流の増加量が非常に大きくなるので、力率100%を維持するためには、界磁電流を制御して、動作点をA点に近づけ、望ましくは一致させることが必要になる。
【0050】
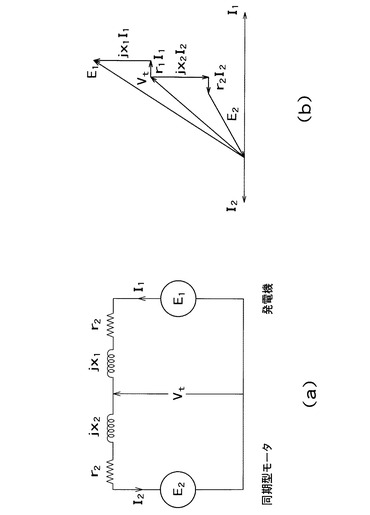
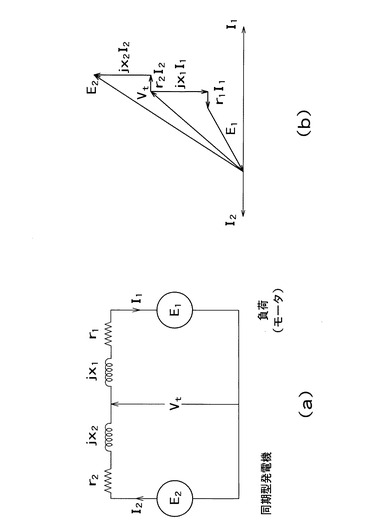
図3は、図1に示す本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける同期型回転電機1が同期型モータである場合の等価回路図(a)及びベクトル図(b)であり、図4は、上記同期型回転電機1が同期型発電機である場合の等価回路図(a)及びベクトル図(b)である。
【0051】
図3及び図4を参照して、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける統合制御装置8による界磁電流と電機子電流との協調制御の原理について説明する。
【0052】
同期型モータの場合の等価回路図及びベクトル図を示す図3(a)及び図3(b)において、以下の各式が成立する。
【数8】
ここで、E1,E2は、発電機(図1における発電機3c)及び同期型モータ(図1における同期型回転電機1)の誘導起電力、Vtは端子電圧、I(=I1=I2)は、線電流、r1,x1は、発電機の抵抗及びリアクタンス、r2,x2は、同期型モータの抵抗及びリアクタンス、δ1,δ2は、発電機及び同期型モータの誘導起電力と端子電圧との間の位相角(=負荷角)、θは力率角である。
【0053】
また、同期型モータ及び発電機の誘導起電力E1,E2、発電機の入力電力Pi、同期型モータの出力電力P0は、以下の各式により表される。
【数9】
ここで、k1,k2,k3,k4は定数、Φ1,Φ2は、発電機及び同期型モータの有効界磁磁束量、n1,n2は、発電機及び同期型モータの界磁巻線数、If1,If2は、発電機及び同期型モータの界磁電流、ν1,ν2は、発電機及び同期型モータの回転速度(ν=ν1=ν2)、W1,W2は、発電機及び同期型モータの全損失(W1=銅損r1I2+鉄損+機械損+励磁損+冷却電力、W2=銅損r2I2+鉄損+機械損+励磁損+冷却電力)である。
【0054】
端子電圧Vt、発電機の抵抗及びリアクタンスr1,x1、同期型モータの抵抗及びリアクタンスr2,x2の値は与えられるので、式(1)乃至式(4)において、未知数は、E1,E2,I,θ,δ1,δ2の6個が存在する。
【0055】
一般に、同期型モータは、高効率化の観点から、誘導起電力E2と線電流Iとが同相(δ2=θ)になるか、又は、力率が100%(θ=0)になるように制御され、さらに、負荷状態によって線電流Iが決まるので、未知数は、実質的にE1,E2,δ1,δ2の4個となる。
【0056】
従って、E1,E2が求まり、これを式(5)、式(6)に代入すれば、同期型発電機及び同期型モータの界磁電流If1,If2が定まる。即ち、負荷状態に応じて同期型発電機及び同期型モータの界磁電流If1,If2を協調して制御することによって、同期型モータは、負荷状態が変化しても任意の力率角θ及び負荷角δ2を維持して運転することができる。
【0057】
具体的な制御法として、後述の式(16)、式(17)に示すように協調して制御すれば、誘導起電力E2と線電流Iとが常に同相(δ2=θ)になるように運転することができる。
【0058】
また、後述の式(18)、式(19)に示すように協調して制御すれば、力率が常に100%(θ=0)で一定になるように運転することができる。
【0059】
いずれの場合にも、低電圧かつ大電流の電力を高効率かつ高力率に運転制御することが可能な超電導回転電機駆動制御システムを提供することができる。
【0060】
以上のことを数式によって表すと、以下のようになる。先ず、式(3)、式(4)から次式が得られる。
【数10】
また、式(1)、式(2)から次式が得られる。
【数11】
上式を式(5)、式(6)に代入すると次式が成立する。
【数12】
【0061】
次に、誘導起電力と線電流Iとが同相(δ2=θ)になるように制御する場合について、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける統合制御装置8による協調制御方法を具体的に示す。
【0062】
式(3)、式(4)にδ2=θを代入すると次式が得られる。
【数13】
上の二つの式(13)、(14)から次式が得られる。
【数14】
この式を変形して式(6)に代入すると次式が成立する。
【数15】
また、式(13)、式(14)を式(10)、式(5)に代入すると次式が成立する。
【数16】
【0063】
次に、力率が1(θ=0)になるように制御する場合について、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける統合制御装置8による協調制御方法を具体的に示す。式(11)、式(12)にθ=0を代入すると次式が成立する。
【数17】
【0064】
尚、力率角θは、端子電圧Vt及び線電流Iの検出により検知することができ、負荷角δ1及びδ2は、端子電圧Vt及び誘導起電力E1,E2の位置検出により検知することができる。
【0065】
同期型回転電機1を同期型発電機として使用する場合には、等価回路図及びベクトル図を示す図4(a)及び図4(b)を用いて、以下の二つの式が成立する。
【数18】
上記二つの式から次式が得られる。
【数19】
この式を式(6)に代入すると次式が成立する。
【数20】
【0066】
従って、負荷状態に応じて同期型発電機の界磁電流を式(20)を満足するように制御することによって、力率角θを一定に維持する運転が可能となり、常に低電圧かつ大電流の電力を高効率かつ高力率に運転制御することが可能な超電導回転電機駆動制御システムを提供することができる。
【0067】
船舶電気推進システムのように低速大トルクが要求される電気推進システムに、本発明の実施の一形態に係る超電導回転電機駆動制御システムを適用すると、低速に伴う小さい誘導起電力を強力な超電導界磁磁束により補うことができる。
【0068】
また、超電導電機子巻線を採用する場合には、電機子電流の増大に伴う銅損が大幅に低減し、効率を飛躍的に向上させることができる。
【0069】
図6(b)は、本発明の実施の一形態に係る超電導回転電機駆動制御システムの伝達効率を示す簡易ブロック図である。図6(b)において、記号△が付された数値は損失(%)を示し、記号△が付されていない数値は伝達効率(%)を示している。尚、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいては、定格時及び1/2船速時の伝達効率は同一の数値となる。
【0070】
本発明の実施の一形態に係る超電導回転電機駆動制御システムを採用した電気推進システムの伝達効率は、必要とされる冷凍装置12の電力を考慮しても、図6(b)に示すようになり、図6(a)に示す従来の電気推進システムの場合よりも定格運転時で約10%、1/2船速時で約26%、伝達効率が向上する顕著な効果が得られる。
【0071】
同期型回転電機1と電力装置2との間で授受される電力の変動、即ち、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、界磁電流供給用として回転子側に超電導コイルを備え、電圧を可変調整する回転変圧器式の誘導集電装置9を界磁電源7と界磁側電力変換装置10との間に配設することにより、回転子内界磁回路を一体として超電導化することが可能となり、低損失励磁及び断熱容易化を達成することができ、回転子構造の簡素化と冷凍装置12の所要容量の低減とを図ることができる。
【0072】
誘導集電装置9を配設した上記構成において、界磁電源7から回転界磁巻線(超電導界磁巻線)1cに界磁電流として直流電流を供給する場合には、誘導集電装置9は交流電流しか供給することができないので、誘導集電装置9の回転子側に電力変換装置(AC/DC変換装置)10を配設するとよい。
【0073】
また、誘導集電装置9を配設した上記構成において、界磁電源7から回転界磁巻線(超電導界磁巻線)1cに界磁電流として交流電流を供給する場合には、回転子側又は固定子側にコンバータ、インバータ又はサイクロコンバータ等の電力変換装置10を配設することにより、界磁電流の大きさを容易に制御することができる。
【0074】
一方、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1と電力装置2との間の回転電機側に、即ち、同期型回転電機1と電機子側電力変換装置5との間に、超電導コイルを備え、電圧を可変調整する超電導変圧器11を配設することにより、電機子電圧の変換が容易に達成できるとともに、電機子回路を一体として超電導化することが可能となり、低損失通電及び断熱容易化を達成することができ、電機子構造の簡素化と冷凍装置12の所要容量の低減とを図ることができる。
【0075】
超電導変圧器11は、少なくとも同期型回転電機1側の巻線として超電導巻線、即ち、超電導コイルを有するものとし、電機子側電力変換装置5側の巻線は超電導巻線でも銅巻線でもよい。
【0076】
超電導変圧器11を配設した上記構成において、超電導変圧器11の回転電機側又は電力装置側に、インバータ、コンバータ又はサイクロコンバータ等の電力変換装置10を配設することにより、電機子電流の大きさを容易に制御することができる。
【0077】
出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1にプロペラ6を結合すれば、船舶推進、風力発電等に使用することができ、高効率かつ高力率の運転制御を達成することができる。
【0078】
また、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1を発電機として運転するとともに、電力装置2を、回転状若しくは直線状のモータ、又は、水素エネルギー発生装置や一般電力用電源装置等の負荷装置4として用いれば、交通・産業システム用モータ及び分散電源・電力用発電機の高効率電源装置として使用することができ、幅広い応用が可能となる。
【0079】
さらに、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1をモータとして運転するとともに、電力装置2を原動機及び超電導発電機を備えた電源として用いれば、高効率電気駆動システムを達成することができ、幅広い応用が可能となる。
【0080】
以上に説明したように、本発明の実施の一形態に係る超電導回転電機駆動制御システムは、同期型回転電機1と電力装置2との間で授受される電力の変動、即ち、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えることにより、負荷変動等の運転条件の変化に対して常に低電圧かつ大電流の電力を高効率かつ高力率に運転制御することが可能な小型軽量の超電導回転電機駆動制御システムを提供することができる。
【図面の簡単な説明】
【0081】
【図1】本発明の実施の一形態に係る超電導回転電機駆動制御システムの構成を示すブロック図である。
【図2】界磁電流に対する電機子電流の関係を表すV特性を超電導機及び従来機について示すグラフである。
【図3】図1に示す本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける同期型回転電機1が同期型モータである場合の等価回路図(a)及びベクトル図(b)である。
【図4】図1に示す本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける同期型回転電機1が同期型発電機である場合の等価回路図(a)及びベクトル図(b)である。
【図5】スーパーエコシップに備えられる電気推進システムの構成を示すブロック図である。
【図6】図5に示す従来の電気推進システムの伝達効率を示す簡易ブロック図(a)、及び、本発明の実施の一形態に係る超電導回転電機駆動制御システムの伝達効率を示す簡易ブロック図(b)である。
【符号の説明】
【0082】
1 同期型回転電機
1a 回転界磁巻線
1b 固定電機子巻線
1c 超電導界磁巻線
1d 超電導電機子巻線(又は銅電機子巻線)
2 電力装置
3 電源装置
3a 発電機
3b 原動機
3c 超電導発電機(又は銅発電機)
4 負荷装置
5 電機子側電力変換装置
6 プロペラ
7 界磁電源
8 統合制御装置
9 誘導集電装置
10 界磁側電力変換装置
11 超電導変圧器
12 冷凍装置
【技術分野】
【0001】
本発明は、低速大トルクが要求される船舶を中心に、風力、鉄道、自動車、電力・産業用補機等に用いられる超電導回転電機駆動制御システムに関する。
【背景技術】
【0002】
最近、スーパーエコシップと呼ばれる環境負荷対応型の電気推進システムを備える船舶が注目されている。これは、新型の船型、二重反転プロペラ及び電気推進システムの採用による配置自由度を活用した新しいコンセプトの船舶であり、採用されている上記技術の効果により普及促進が図られている。
【0003】
図5は、スーパーエコシップに備えられる電気推進システムの構成を示すブロック図である。
【0004】
この電気推進システムは、回転電機1と、直流電力を供給する電源装置3と、電源装置3から供給される直流電力を交流電力に変換して回転電機1に供給するインバータ等の電力変換装置5と、回転電機1に直結された推進プロペラ6と、回転電機1に界磁電流を供給する界磁電源7とを備えている。
【0005】
回転電機1には、高効率を得るために、回転界磁巻線1aと固定電機子巻線1bとを備えた同期型モータが使用され、電源装置3には、通常、発電機3aと原動機3bとを結合したものが使用される。
【0006】
推進プロペラの推進力を増減させるために原動機の出力を増減させる在来型の直結型推進機と異なり、図5に示す電気推進システムは、原動機(図5には図示せず。図6参照。)を常時最高出力で稼働させる一方、回転電機1に供給する電力を電力変換装置5によって増減させることにより推進プロペラの推進力を増減させる。
【0007】
即ち、電気推進システムにおいては、原動機の出力は常時一定に保持されるので、在来型の直結型推進機に比して、排出される二酸化炭素等の有害物質の量を大幅に抑制し、環境への悪影響を低減することができるという利点を有している。
【0008】
しかし、電気推進システムは、在来型の直結型推進機とは異なり、モータ、発電機、電力変換装置を使用するため、最終的な伝達効率が在来型の直結型推進機よりも低いという欠点を有している。
【0009】
図6(a)は、図5に示す従来の電気推進システムの伝達効率を示す簡易ブロック図である。図6(a)において、記号△が付された数値は損失(%)を示し、記号△が付されていない数値は伝達効率(%)を示している。また、上段の数値は、定格時の伝達効率(%)を示し、下段の数値は、1/2船速時の伝達効率(%)を示している。
【0010】
図6(a)に示されるように、定格時79.7%、1/2船速時63.3%という伝達効率は、省エネルギーの観点から充分な高さとは言えない。
【0011】
この伝達効率の低さは、主として、発電機、モータ等の回転電機の伝達効率の低さに起因している。
【0012】
従って、発電機、モータ等の回転電機の伝達効率の向上を図ることにより、電気推進システム全体としての伝達効率の向上を図ることが求められている。
【0013】
図5の回転電機1を風力用発電機として用いる場合には、電力装置2として、電源装置3ではなく、産業用モータや一般電力用電源装置等の負荷装置4が接続されることとなるが、その場合にも、低速大トルクが要求されることから、発電機、モータ等の回転電機の伝達効率の低さの改善が課題となる。
【0014】
船舶用電気推進モータや風力用発電機のように低速大トルクが要求される場合には、誘導起電力が小さいために低電圧・大電流回転電機となる。
【0015】
従って、図5に示す従来の電気推進システムでは、電機子電流の増大に伴って銅損が増加し、伝達効率が大幅に低下する。また、電機子巻線の発熱量が増大するので、冷却装置を大型化しなければならないという欠点も生じる。
【0016】
そこで、伝達効率の向上と冷却の容易化のために、電機子巻線の電流密度を下げる対策が採られる場合もあるが、その場合には回転電機が大型化するので、その対策には限界がある。
【0017】
尚、従来の技術においては、電源容量を増大することなく、高出力化を図ることを意図したモータの発明が提案されているが(例えば、特許文献1参照)、伝達効率の低さの問題を解決するものではない。
【特許文献1】特開2005−237175号公報
【発明の開示】
【発明が解決しようとする課題】
【0018】
本発明の目的は、高効率化及び小型軽量化を図った超電導回転電機駆動制御システムを提供することである。
【課題を解決するための手段】
【0019】
本発明に係る超電導回転電機駆動制御システムの第1の態様によれば、
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
上記同期型回転電機に電力を供給する電源装置、又は、上記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
上記同期型回転電機と上記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
上記同期型回転電機に界磁電流を供給する界磁電源と、
上記界磁電源から上記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
上記超電導界磁巻線と上記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
上記超電導界磁巻線及び上記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
上記同期型回転電機が同期型モータとして使用される場合に、
If2を上記超電導界磁巻線に通電される界磁電流、Iを線電流、E2を上記同期型回転電機の誘導起電力、Vtを端子電圧、k4を定数、n2を上記超電導界磁巻線の巻線数、νを上記同期型回転電機の回転速度、θを力率角、r2を上記同期型回転電機の抵抗、x2を上記同期型回転電機のリアクタンスとすると、
上記統合制御装置は、上記同期型回転電機と上記電力装置との間で授受される電力の変動に応じて、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(11)
【数1】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システムが提供される。
【0020】
本発明に係る超電導回転電機駆動制御システムの第1の態様において、上記統合制御装置は、上記同期型回転電機の上記誘導起電力E2と上記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(16)
【数2】
を満足するように制御を行うこととするとよい。
【0021】
又は、本発明に係る超電導回転電機駆動制御システムの第1の態様において、上記統合制御装置は、上記同期型回転電機の力率が常に1(cosθ=1)になるように、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(18)
【数3】
を満足するように制御を行うこととするとよい。
【0022】
本発明に係る超電導回転電機駆動制御システムの第2の態様によれば、
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
上記同期型回転電機に電力を供給する電源装置、又は、上記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
上記同期型回転電機と上記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
上記同期型回転電機に界磁電流を供給する界磁電源と、
上記界磁電源から上記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
上記超電導界磁巻線と上記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
上記超電導界磁巻線及び上記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
上記同期型回転電機が同期型モータとして使用される場合に、
If1,If2を上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される界磁電流、Iを線電流、E1,E2を上記電源装置、上記同期型回転電機のそれぞれの誘導起電力、Vtを端子電圧、k3,k4を定数、n1,n2を上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれの巻線数、νを上記同期型回転電機の回転速度、θを力率角、r1,r2を上記電源装置、上記同期型回転電機のそれぞれの抵抗、x1,x2を上記電源装置、上記同期型回転電機のそれぞれのリアクタンスとすると、
上記統合制御装置は、上記同期型回転電機と上記電力装置との間で授受される電力の変動に応じて、上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される上記界磁電流If1,If2が以下の式(11)及び式(12)
【数4】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システムが提供される。
【0023】
本発明に係る超電導回転電機駆動制御システムの第2の態様において、上記統合制御装置は、上記同期型回転電機の上記誘導起電力E2と上記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される上記界磁電流If1,If2が以下の式(16)及び式(17)
【数5】
を満足するように制御を行うこととするとよい。
【0024】
又は、本発明に係る超電導回転電機駆動制御システムの第2の態様において、上記統合制御装置は、上記同期型回転電機の力率が常に1(cosθ=1)になるように、上記電源装置の界磁巻線、上記同期型回転電機の上記超電導界磁巻線のそれぞれに通電される上記界磁電流If1,If2が以下の式(18)及び式(19)
【数6】
を満足するように制御を行うこととするとよい。
【0025】
本発明に係る超電導回転電機駆動制御システムの第3の態様によれば、
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
上記同期型回転電機に電力を供給する電源装置、又は、上記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
上記同期型回転電機と上記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
上記同期型回転電機に界磁電流を供給する界磁電源と、
上記界磁電源から上記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
上記超電導界磁巻線と上記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
上記超電導界磁巻線及び上記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
上記同期型回転電機が発電機として使用される場合に、
If2を上記超電導界磁巻線に通電される界磁電流、Iを線電流、Vtを端子電圧、k4を定数、n2を上記超電導界磁巻線の巻線数、νを上記同期型回転電機の回転速度、θを力率角、r2を上記同期型回転電機の抵抗、x2を上記同期型回転電機のリアクタンスとすると、
上記統合制御装置は、上記同期型回転電機と上記電力装置との間で授受される電力の変動に応じて、上記超電導界磁巻線に通電される上記界磁電流If2が以下の式(20)
【数7】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システムが提供される。
【0026】
本発明に係る超電導回転電機駆動制御システムの上記各態様において、上記電源装置は、銅発電機又は超電導発電機と原動機とを結合したものであるものとするとよい。
【0027】
また、少なくとも上記同期型回転電機側の巻線として超電導巻線を備え、電圧を可変調整する超電導変圧器を、上記同期型回転電機と上記電機子側電力変換装置との間にさらに備えるものとするとよい。
【0028】
また、上記超電導変圧器の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えるものとするとよい。
【0029】
また、回転子側に超電導コイルを備え、電圧を可変調整する回転変圧器を含む誘導集電装置を、上記界磁電源と上記界磁側電力変換装置との間にさらに備えるものとするとよい。
【0030】
また、上記誘導集電装置の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えるものとするとよい。
【0031】
上記誘導集電装置の回転子側に備えられた上記電力変換装置は、AC/DC変換装置であるものとするとよい。
【0032】
本発明に係る超電導回転電機駆動制御システムの上記各態様において、上記同期型回転電機に結合されるプロペラをさらに備えるものとするとよい。
【発明の効果】
【0033】
本発明に係る超電導回転電機駆動制御システムの一態様は、上記構成により、高効率化及び小型軽量化を図った超電導回転電機駆動制御システムを提供することができる。即ち、負荷変動等の運転条件の変化に対しても常に低電圧かつ大電流の電力により高効率かつ高力率の運転制御が可能な小型軽量の超電導回転電機駆動制御システムを提供することができる。
【発明を実施するための最良の形態】
【0034】
以下、本発明の実施の一形態に係る超電導回転電機駆動制御システムについて、図面を参照しながら詳細に説明する。
【0035】
図1は、本発明の実施の一形態に係る超電導回転電機駆動制御システムの構成を示すブロック図である。
【0036】
本発明の実施の一形態に係る超電導回転電機駆動制御システムは、超電導界磁巻線1cと銅電機子巻線又は超電導電機子巻線1dとを含む同期型回転電機1と、同期型回転電機1に電力を供給する電源装置3又は同期型回転電機1から電力の供給を受ける負荷装置4として備えられる電力装置2と、同期型回転電機1と電力装置2との間で授受される電力の変換を行うインバータ、コンバータ又はサイクロコンバータ等の電機子側電力変換装置5と、同期型回転電機1に界磁電流を供給する界磁電源7と、界磁電源7から超電導界磁巻線1cに供給される電流を制御するインバータ、コンバータ又はサイクロコンバータ等の界磁側電力変換装置10と、超電導界磁巻線1cと銅電機子巻線又は超電導電機子巻線1dとに流れる直流又は交流の電流を協調して制御する統合制御装置8と、超電導界磁巻線1c及び超電導電機子巻線1dを極低温に冷却する冷凍装置12と、を備えている。
【0037】
統合制御装置8は、同期型回転電機1と電力装置2との間で授受される電力の変動、即ち、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が後述の式(11)を満足するように制御を行う。従って、同期型回転電機1と電力装置2との間で授受される電力の値が統合制御装置8にフィードバックされている。
【0038】
同期型回転電機1には、例えばプロペラ6が結合される。
【0039】
電源装置3には、通常、銅発電機又は超電導発電機3cと原動機3bとを結合したものが使用される。
【0040】
尚、後述するように、界磁電源7と界磁側電力変換装置10との間に電圧を可変調整する回転変圧器式の誘導集電装置9を、また、同期型回転電機1と電機子側電力変換装置5との間に電圧を可変調整する超電導変圧器11を、それぞれ配設することが望ましい。超電導変圧器11は、少なくとも同期型回転電機1側の巻線として超電導巻線を有するものとし、電機子側電力変換装置5側の巻線は超電導巻線でも銅巻線でもよい。また、後述するように、超電導変圧器11の回転子側又は固定子側に、電力変換装置をさらに備えるものとするとよい。
【0041】
図2は、界磁電流に対する電機子電流の関係を表すV特性を超電導機及び従来機について示すグラフである。グラフ中の曲線S0,S1,S2は、負荷0%、50%、100%のときの超電導機のV特性を示し、曲線P0,P1,P2は、負荷0%、50%、100%のときの従来機のV特性を示している。
【0042】
図2のグラフに示すように、いずれの場合においても、力率100%のときに電機子電流は最小値となり望ましい。
【0043】
しかし、各曲線は、界磁電流を増大させると進み力率領域に移動し、界磁電流を減少させると遅れ力率領域に移動し、電機子電流は、進み力率領域及び遅れ力率領域のいずれにおいても増大する。
【0044】
また、負荷が0%→50%→100%と増加するにつれて電機子電流は、超電導機及び従来機のいずれの場合も増大し、力率は変化する。
【0045】
従来機の場合は、界磁電流の変化に対して電機子電流は緩やかに変化するため、各曲線P0,P1,P2で示されるように、V曲線は緩やかになる。
【0046】
一方、超電導機の場合は、同期リアクタンスが小さいために、界磁電流の変化に対して電機子電流は急激に変化し、各曲線S0,S1,S2で示されるように、V曲線は非常に急峻となる。
【0047】
一定界磁電流の場合に、0%から100%への負荷変動が生じると、動作点が、従来機ではB点、超電導機ではC点に移動する。
【0048】
力率100%を維持するためには、動作点をA点に制御する必要がある。従来機の場合、(B点での電機子電流)/(A点での電機子電流)=1.2(倍)と電機子電流の増加量が小さいため、実質的に界磁電流を制御する必要がない。
【0049】
しかし、超電導機の場合、(C点での電機子電流)/(A点での電機子電流)=2.0(倍)と電機子電流の増加量が非常に大きくなるので、力率100%を維持するためには、界磁電流を制御して、動作点をA点に近づけ、望ましくは一致させることが必要になる。
【0050】
図3は、図1に示す本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける同期型回転電機1が同期型モータである場合の等価回路図(a)及びベクトル図(b)であり、図4は、上記同期型回転電機1が同期型発電機である場合の等価回路図(a)及びベクトル図(b)である。
【0051】
図3及び図4を参照して、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける統合制御装置8による界磁電流と電機子電流との協調制御の原理について説明する。
【0052】
同期型モータの場合の等価回路図及びベクトル図を示す図3(a)及び図3(b)において、以下の各式が成立する。
【数8】
ここで、E1,E2は、発電機(図1における発電機3c)及び同期型モータ(図1における同期型回転電機1)の誘導起電力、Vtは端子電圧、I(=I1=I2)は、線電流、r1,x1は、発電機の抵抗及びリアクタンス、r2,x2は、同期型モータの抵抗及びリアクタンス、δ1,δ2は、発電機及び同期型モータの誘導起電力と端子電圧との間の位相角(=負荷角)、θは力率角である。
【0053】
また、同期型モータ及び発電機の誘導起電力E1,E2、発電機の入力電力Pi、同期型モータの出力電力P0は、以下の各式により表される。
【数9】
ここで、k1,k2,k3,k4は定数、Φ1,Φ2は、発電機及び同期型モータの有効界磁磁束量、n1,n2は、発電機及び同期型モータの界磁巻線数、If1,If2は、発電機及び同期型モータの界磁電流、ν1,ν2は、発電機及び同期型モータの回転速度(ν=ν1=ν2)、W1,W2は、発電機及び同期型モータの全損失(W1=銅損r1I2+鉄損+機械損+励磁損+冷却電力、W2=銅損r2I2+鉄損+機械損+励磁損+冷却電力)である。
【0054】
端子電圧Vt、発電機の抵抗及びリアクタンスr1,x1、同期型モータの抵抗及びリアクタンスr2,x2の値は与えられるので、式(1)乃至式(4)において、未知数は、E1,E2,I,θ,δ1,δ2の6個が存在する。
【0055】
一般に、同期型モータは、高効率化の観点から、誘導起電力E2と線電流Iとが同相(δ2=θ)になるか、又は、力率が100%(θ=0)になるように制御され、さらに、負荷状態によって線電流Iが決まるので、未知数は、実質的にE1,E2,δ1,δ2の4個となる。
【0056】
従って、E1,E2が求まり、これを式(5)、式(6)に代入すれば、同期型発電機及び同期型モータの界磁電流If1,If2が定まる。即ち、負荷状態に応じて同期型発電機及び同期型モータの界磁電流If1,If2を協調して制御することによって、同期型モータは、負荷状態が変化しても任意の力率角θ及び負荷角δ2を維持して運転することができる。
【0057】
具体的な制御法として、後述の式(16)、式(17)に示すように協調して制御すれば、誘導起電力E2と線電流Iとが常に同相(δ2=θ)になるように運転することができる。
【0058】
また、後述の式(18)、式(19)に示すように協調して制御すれば、力率が常に100%(θ=0)で一定になるように運転することができる。
【0059】
いずれの場合にも、低電圧かつ大電流の電力を高効率かつ高力率に運転制御することが可能な超電導回転電機駆動制御システムを提供することができる。
【0060】
以上のことを数式によって表すと、以下のようになる。先ず、式(3)、式(4)から次式が得られる。
【数10】
また、式(1)、式(2)から次式が得られる。
【数11】
上式を式(5)、式(6)に代入すると次式が成立する。
【数12】
【0061】
次に、誘導起電力と線電流Iとが同相(δ2=θ)になるように制御する場合について、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける統合制御装置8による協調制御方法を具体的に示す。
【0062】
式(3)、式(4)にδ2=θを代入すると次式が得られる。
【数13】
上の二つの式(13)、(14)から次式が得られる。
【数14】
この式を変形して式(6)に代入すると次式が成立する。
【数15】
また、式(13)、式(14)を式(10)、式(5)に代入すると次式が成立する。
【数16】
【0063】
次に、力率が1(θ=0)になるように制御する場合について、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける統合制御装置8による協調制御方法を具体的に示す。式(11)、式(12)にθ=0を代入すると次式が成立する。
【数17】
【0064】
尚、力率角θは、端子電圧Vt及び線電流Iの検出により検知することができ、負荷角δ1及びδ2は、端子電圧Vt及び誘導起電力E1,E2の位置検出により検知することができる。
【0065】
同期型回転電機1を同期型発電機として使用する場合には、等価回路図及びベクトル図を示す図4(a)及び図4(b)を用いて、以下の二つの式が成立する。
【数18】
上記二つの式から次式が得られる。
【数19】
この式を式(6)に代入すると次式が成立する。
【数20】
【0066】
従って、負荷状態に応じて同期型発電機の界磁電流を式(20)を満足するように制御することによって、力率角θを一定に維持する運転が可能となり、常に低電圧かつ大電流の電力を高効率かつ高力率に運転制御することが可能な超電導回転電機駆動制御システムを提供することができる。
【0067】
船舶電気推進システムのように低速大トルクが要求される電気推進システムに、本発明の実施の一形態に係る超電導回転電機駆動制御システムを適用すると、低速に伴う小さい誘導起電力を強力な超電導界磁磁束により補うことができる。
【0068】
また、超電導電機子巻線を採用する場合には、電機子電流の増大に伴う銅損が大幅に低減し、効率を飛躍的に向上させることができる。
【0069】
図6(b)は、本発明の実施の一形態に係る超電導回転電機駆動制御システムの伝達効率を示す簡易ブロック図である。図6(b)において、記号△が付された数値は損失(%)を示し、記号△が付されていない数値は伝達効率(%)を示している。尚、本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいては、定格時及び1/2船速時の伝達効率は同一の数値となる。
【0070】
本発明の実施の一形態に係る超電導回転電機駆動制御システムを採用した電気推進システムの伝達効率は、必要とされる冷凍装置12の電力を考慮しても、図6(b)に示すようになり、図6(a)に示す従来の電気推進システムの場合よりも定格運転時で約10%、1/2船速時で約26%、伝達効率が向上する顕著な効果が得られる。
【0071】
同期型回転電機1と電力装置2との間で授受される電力の変動、即ち、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、界磁電流供給用として回転子側に超電導コイルを備え、電圧を可変調整する回転変圧器式の誘導集電装置9を界磁電源7と界磁側電力変換装置10との間に配設することにより、回転子内界磁回路を一体として超電導化することが可能となり、低損失励磁及び断熱容易化を達成することができ、回転子構造の簡素化と冷凍装置12の所要容量の低減とを図ることができる。
【0072】
誘導集電装置9を配設した上記構成において、界磁電源7から回転界磁巻線(超電導界磁巻線)1cに界磁電流として直流電流を供給する場合には、誘導集電装置9は交流電流しか供給することができないので、誘導集電装置9の回転子側に電力変換装置(AC/DC変換装置)10を配設するとよい。
【0073】
また、誘導集電装置9を配設した上記構成において、界磁電源7から回転界磁巻線(超電導界磁巻線)1cに界磁電流として交流電流を供給する場合には、回転子側又は固定子側にコンバータ、インバータ又はサイクロコンバータ等の電力変換装置10を配設することにより、界磁電流の大きさを容易に制御することができる。
【0074】
一方、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1と電力装置2との間の回転電機側に、即ち、同期型回転電機1と電機子側電力変換装置5との間に、超電導コイルを備え、電圧を可変調整する超電導変圧器11を配設することにより、電機子電圧の変換が容易に達成できるとともに、電機子回路を一体として超電導化することが可能となり、低損失通電及び断熱容易化を達成することができ、電機子構造の簡素化と冷凍装置12の所要容量の低減とを図ることができる。
【0075】
超電導変圧器11は、少なくとも同期型回転電機1側の巻線として超電導巻線、即ち、超電導コイルを有するものとし、電機子側電力変換装置5側の巻線は超電導巻線でも銅巻線でもよい。
【0076】
超電導変圧器11を配設した上記構成において、超電導変圧器11の回転電機側又は電力装置側に、インバータ、コンバータ又はサイクロコンバータ等の電力変換装置10を配設することにより、電機子電流の大きさを容易に制御することができる。
【0077】
出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1にプロペラ6を結合すれば、船舶推進、風力発電等に使用することができ、高効率かつ高力率の運転制御を達成することができる。
【0078】
また、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1を発電機として運転するとともに、電力装置2を、回転状若しくは直線状のモータ、又は、水素エネルギー発生装置や一般電力用電源装置等の負荷装置4として用いれば、交通・産業システム用モータ及び分散電源・電力用発電機の高効率電源装置として使用することができ、幅広い応用が可能となる。
【0079】
さらに、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えた本発明の実施の一形態に係る超電導回転電機駆動制御システムにおいて、同期型回転電機1をモータとして運転するとともに、電力装置2を原動機及び超電導発電機を備えた電源として用いれば、高効率電気駆動システムを達成することができ、幅広い応用が可能となる。
【0080】
以上に説明したように、本発明の実施の一形態に係る超電導回転電機駆動制御システムは、同期型回転電機1と電力装置2との間で授受される電力の変動、即ち、出力変動に応じて、同期型回転電機1の超電導界磁巻線1cに通電される界磁電流が上記式(11)を満足するように制御を行う統合制御装置8を備えることにより、負荷変動等の運転条件の変化に対して常に低電圧かつ大電流の電力を高効率かつ高力率に運転制御することが可能な小型軽量の超電導回転電機駆動制御システムを提供することができる。
【図面の簡単な説明】
【0081】
【図1】本発明の実施の一形態に係る超電導回転電機駆動制御システムの構成を示すブロック図である。
【図2】界磁電流に対する電機子電流の関係を表すV特性を超電導機及び従来機について示すグラフである。
【図3】図1に示す本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける同期型回転電機1が同期型モータである場合の等価回路図(a)及びベクトル図(b)である。
【図4】図1に示す本発明の実施の一形態に係る超電導回転電機駆動制御システムにおける同期型回転電機1が同期型発電機である場合の等価回路図(a)及びベクトル図(b)である。
【図5】スーパーエコシップに備えられる電気推進システムの構成を示すブロック図である。
【図6】図5に示す従来の電気推進システムの伝達効率を示す簡易ブロック図(a)、及び、本発明の実施の一形態に係る超電導回転電機駆動制御システムの伝達効率を示す簡易ブロック図(b)である。
【符号の説明】
【0082】
1 同期型回転電機
1a 回転界磁巻線
1b 固定電機子巻線
1c 超電導界磁巻線
1d 超電導電機子巻線(又は銅電機子巻線)
2 電力装置
3 電源装置
3a 発電機
3b 原動機
3c 超電導発電機(又は銅発電機)
4 負荷装置
5 電機子側電力変換装置
6 プロペラ
7 界磁電源
8 統合制御装置
9 誘導集電装置
10 界磁側電力変換装置
11 超電導変圧器
12 冷凍装置
【特許請求の範囲】
【請求項1】
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
前記同期型回転電機に電力を供給する電源装置、又は、前記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
前記同期型回転電機と前記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
前記同期型回転電機に界磁電流を供給する界磁電源と、
前記界磁電源から前記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
前記超電導界磁巻線と前記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
前記超電導界磁巻線及び前記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
前記同期型回転電機が同期型モータとして使用される場合に、
If2を前記超電導界磁巻線に通電される界磁電流、Iを線電流、E2を前記同期型回転電機の誘導起電力、Vtを端子電圧、k4を定数、n2を前記超電導界磁巻線の巻線数、νを前記同期型回転電機の回転速度、θを力率角、r2を前記同期型回転電機の抵抗、x2を前記同期型回転電機のリアクタンスとすると、
前記統合制御装置は、前記同期型回転電機と前記電力装置との間で授受される電力の変動に応じて、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(11)
【数1】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システム。
【請求項2】
前記統合制御装置は、前記同期型回転電機の前記誘導起電力E2と前記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(16)
【数2】
を満足するように制御を行うことを特徴とする請求項1に記載の超電導回転電機駆動制御システム。
【請求項3】
前記統合制御装置は、前記同期型回転電機の力率が常に1(cosθ=1)になるように、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(18)
【数3】
を満足するように制御を行うことを特徴とする請求項1に記載の超電導回転電機駆動制御システム。
【請求項4】
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
前記同期型回転電機に電力を供給する電源装置、又は、前記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
前記同期型回転電機と前記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
前記同期型回転電機に界磁電流を供給する界磁電源と、
前記界磁電源から前記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
前記超電導界磁巻線と前記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
前記超電導界磁巻線及び前記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
前記同期型回転電機が同期型モータとして使用される場合に、
If1,If2を前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される界磁電流、Iを線電流、E1,E2を前記電源装置、前記同期型回転電機のそれぞれの誘導起電力、Vtを端子電圧、k3,k4を定数、n1,n2を前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれの巻線数、νを前記同期型回転電機の回転速度、θを力率角、r1,r2を前記電源装置、前記同期型回転電機のそれぞれの抵抗、x1,x2を前記電源装置、前記同期型回転電機のそれぞれのリアクタンスとすると、
前記統合制御装置は、前記同期型回転電機と前記電力装置との間で授受される電力の変動に応じて、前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される前記界磁電流If1,If2が以下の式(11)及び式(12)
【数4】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システム。
【請求項5】
前記統合制御装置は、前記同期型回転電機の前記誘導起電力E2と前記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される前記界磁電流If1,If2が以下の式(16)及び式(17)
【数5】
を満足するように制御を行うことを特徴とする請求項4に記載の超電導回転電機駆動制御システム。
【請求項6】
前記統合制御装置は、前記同期型回転電機の力率が常に1(cosθ=1)になるように、前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される前記界磁電流If1,If2が以下の式(18)及び式(19)
【数6】
を満足するように制御を行うことを特徴とする請求項4に記載の超電導回転電機駆動制御システム。
【請求項7】
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
前記同期型回転電機に電力を供給する電源装置、又は、前記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
前記同期型回転電機と前記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
前記同期型回転電機に界磁電流を供給する界磁電源と、
前記界磁電源から前記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
前記超電導界磁巻線と前記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
前記超電導界磁巻線及び前記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
前記同期型回転電機が発電機として使用される場合に、
If2を前記超電導界磁巻線に通電される界磁電流、Iを線電流、Vtを端子電圧、k4を定数、n2を前記超電導界磁巻線の巻線数、νを前記同期型回転電機の回転速度、θを力率角、r2を前記同期型回転電機の抵抗、x2を前記同期型回転電機のリアクタンスとすると、
前記統合制御装置は、前記同期型回転電機と前記電力装置との間で授受される電力の変動に応じて、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(20)
【数7】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システム。
【請求項8】
前記電源装置は、銅発電機又は超電導発電機と原動機とを結合したものであることを特徴とする請求項1乃至7のいずれかに記載の超電導回転電機駆動制御システム。
【請求項9】
少なくとも前記同期型回転電機側の巻線として超電導巻線を備え、電圧を可変調整する超電導変圧器を、前記同期型回転電機と前記電機子側電力変換装置との間にさらに備えることを特徴とする請求項1乃至8のいずれかに記載の超電導回転電機駆動制御システム。
【請求項10】
前記超電導変圧器の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えることを特徴とする請求項9に記載の超電導回転電機駆動制御システム。
【請求項11】
回転子側に超電導コイルを備え、電圧を可変調整する回転変圧器を含む誘導集電装置を、前記界磁電源と前記界磁側電力変換装置との間にさらに備えることを特徴とする請求項1乃至10のいずれかに記載の超電導回転電機駆動制御システム。
【請求項12】
前記誘導集電装置の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えることを特徴とする請求項11に記載の超電導回転電機駆動制御システム。
【請求項13】
前記誘導集電装置の回転子側に備えられた前記電力変換装置は、AC/DC変換装置であることを特徴とする請求項12に記載の超電導回転電機駆動制御システム。
【請求項14】
前記同期型回転電機に結合されるプロペラをさらに備えることを特徴とする請求項1乃至13のいずれかに記載の超電導回転電機駆動制御システム。
【請求項1】
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
前記同期型回転電機に電力を供給する電源装置、又は、前記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
前記同期型回転電機と前記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
前記同期型回転電機に界磁電流を供給する界磁電源と、
前記界磁電源から前記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
前記超電導界磁巻線と前記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
前記超電導界磁巻線及び前記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
前記同期型回転電機が同期型モータとして使用される場合に、
If2を前記超電導界磁巻線に通電される界磁電流、Iを線電流、E2を前記同期型回転電機の誘導起電力、Vtを端子電圧、k4を定数、n2を前記超電導界磁巻線の巻線数、νを前記同期型回転電機の回転速度、θを力率角、r2を前記同期型回転電機の抵抗、x2を前記同期型回転電機のリアクタンスとすると、
前記統合制御装置は、前記同期型回転電機と前記電力装置との間で授受される電力の変動に応じて、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(11)
【数1】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システム。
【請求項2】
前記統合制御装置は、前記同期型回転電機の前記誘導起電力E2と前記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(16)
【数2】
を満足するように制御を行うことを特徴とする請求項1に記載の超電導回転電機駆動制御システム。
【請求項3】
前記統合制御装置は、前記同期型回転電機の力率が常に1(cosθ=1)になるように、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(18)
【数3】
を満足するように制御を行うことを特徴とする請求項1に記載の超電導回転電機駆動制御システム。
【請求項4】
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
前記同期型回転電機に電力を供給する電源装置、又は、前記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
前記同期型回転電機と前記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
前記同期型回転電機に界磁電流を供給する界磁電源と、
前記界磁電源から前記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
前記超電導界磁巻線と前記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
前記超電導界磁巻線及び前記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
前記同期型回転電機が同期型モータとして使用される場合に、
If1,If2を前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される界磁電流、Iを線電流、E1,E2を前記電源装置、前記同期型回転電機のそれぞれの誘導起電力、Vtを端子電圧、k3,k4を定数、n1,n2を前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれの巻線数、νを前記同期型回転電機の回転速度、θを力率角、r1,r2を前記電源装置、前記同期型回転電機のそれぞれの抵抗、x1,x2を前記電源装置、前記同期型回転電機のそれぞれのリアクタンスとすると、
前記統合制御装置は、前記同期型回転電機と前記電力装置との間で授受される電力の変動に応じて、前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される前記界磁電流If1,If2が以下の式(11)及び式(12)
【数4】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システム。
【請求項5】
前記統合制御装置は、前記同期型回転電機の前記誘導起電力E2と前記銅電機子巻線又は超電導電機子巻線に流れる電機子電流Iとが常に同相になるように、前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される前記界磁電流If1,If2が以下の式(16)及び式(17)
【数5】
を満足するように制御を行うことを特徴とする請求項4に記載の超電導回転電機駆動制御システム。
【請求項6】
前記統合制御装置は、前記同期型回転電機の力率が常に1(cosθ=1)になるように、前記電源装置の界磁巻線、前記同期型回転電機の前記超電導界磁巻線のそれぞれに通電される前記界磁電流If1,If2が以下の式(18)及び式(19)
【数6】
を満足するように制御を行うことを特徴とする請求項4に記載の超電導回転電機駆動制御システム。
【請求項7】
超電導界磁巻線と銅電機子巻線又は超電導電機子巻線とを含む同期型回転電機と、
前記同期型回転電機に電力を供給する電源装置、又は、前記同期型回転電機から電力の供給を受ける負荷装置として備えられる電力装置と、
前記同期型回転電機と前記電力装置との間で授受される電力の変換を行う電機子側電力変換装置と、
前記同期型回転電機に界磁電流を供給する界磁電源と、
前記界磁電源から前記超電導界磁巻線に供給される電流を制御する界磁側電力変換装置と、
前記超電導界磁巻線と前記銅電機子巻線又は超電導電機子巻線とに流れる直流電流又は交流電流を協調して制御する統合制御装置と、
前記超電導界磁巻線及び前記超電導電機子巻線を極低温に冷却する冷凍装置と、
を備え、
前記同期型回転電機が発電機として使用される場合に、
If2を前記超電導界磁巻線に通電される界磁電流、Iを線電流、Vtを端子電圧、k4を定数、n2を前記超電導界磁巻線の巻線数、νを前記同期型回転電機の回転速度、θを力率角、r2を前記同期型回転電機の抵抗、x2を前記同期型回転電機のリアクタンスとすると、
前記統合制御装置は、前記同期型回転電機と前記電力装置との間で授受される電力の変動に応じて、前記超電導界磁巻線に通電される前記界磁電流If2が以下の式(20)
【数7】
を満足するように制御を行うことを特徴とする超電導回転電機駆動制御システム。
【請求項8】
前記電源装置は、銅発電機又は超電導発電機と原動機とを結合したものであることを特徴とする請求項1乃至7のいずれかに記載の超電導回転電機駆動制御システム。
【請求項9】
少なくとも前記同期型回転電機側の巻線として超電導巻線を備え、電圧を可変調整する超電導変圧器を、前記同期型回転電機と前記電機子側電力変換装置との間にさらに備えることを特徴とする請求項1乃至8のいずれかに記載の超電導回転電機駆動制御システム。
【請求項10】
前記超電導変圧器の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えることを特徴とする請求項9に記載の超電導回転電機駆動制御システム。
【請求項11】
回転子側に超電導コイルを備え、電圧を可変調整する回転変圧器を含む誘導集電装置を、前記界磁電源と前記界磁側電力変換装置との間にさらに備えることを特徴とする請求項1乃至10のいずれかに記載の超電導回転電機駆動制御システム。
【請求項12】
前記誘導集電装置の回転子側又は固定子側に、インバータ、コンバータ又はサイクロコンバータを含む電力変換装置をさらに備えることを特徴とする請求項11に記載の超電導回転電機駆動制御システム。
【請求項13】
前記誘導集電装置の回転子側に備えられた前記電力変換装置は、AC/DC変換装置であることを特徴とする請求項12に記載の超電導回転電機駆動制御システム。
【請求項14】
前記同期型回転電機に結合されるプロペラをさらに備えることを特徴とする請求項1乃至13のいずれかに記載の超電導回転電機駆動制御システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−125155(P2008−125155A)
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願番号】特願2006−302923(P2006−302923)
【出願日】平成18年11月8日(2006.11.8)
【出願人】(591206887)株式会社テクノバ (20)
【出願人】(504196300)国立大学法人東京海洋大学 (83)
【Fターム(参考)】
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願日】平成18年11月8日(2006.11.8)
【出願人】(591206887)株式会社テクノバ (20)
【出願人】(504196300)国立大学法人東京海洋大学 (83)
【Fターム(参考)】
[ Back to top ]