
超電導磁石装置
【課題】現実の使用に耐えうる推進力等が得られる超電導磁石装置を提供すること。
【解決手段】この船舶1に搭載された超電導磁石装置10は、所定形状のダクトと、このダクト外周に設けられ前記ダクトを横切る磁界を発生させる超電導磁石と、ダクト内に設けられ前記磁界と直交する方向の電界を発生させる電極対とを備え、それぞれ発生させた磁界と電界との相互作用により発生するローレンツ力Fを利用して、ダクト内に充填された導電性流体30を流動させるように構成されており、かつ前記ダクトを閉ループで形成するとともに、導電性流体30の流動により回転駆動されるハイドロリックモータ40を備えている。
【解決手段】この船舶1に搭載された超電導磁石装置10は、所定形状のダクトと、このダクト外周に設けられ前記ダクトを横切る磁界を発生させる超電導磁石と、ダクト内に設けられ前記磁界と直交する方向の電界を発生させる電極対とを備え、それぞれ発生させた磁界と電界との相互作用により発生するローレンツ力Fを利用して、ダクト内に充填された導電性流体30を流動させるように構成されており、かつ前記ダクトを閉ループで形成するとともに、導電性流体30の流動により回転駆動されるハイドロリックモータ40を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば船舶や水中航走体に搭載される超電導磁石装置に関するものである。
【背景技術】
【0002】
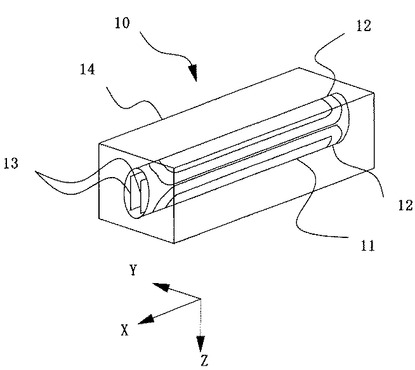
例えば非特許文献1、特許文献1に記載の船舶等に用いられる従来の超電導磁石装置10は、図2に示すように、その前方から海水を吸い込んで後方からジェット流として吐き出すためのダクト11と、このダクト11の外周に設けられ前記ダクト11を横切る磁界を発生させる超電導磁石12,12と、前記ダクト11内に設けられ前記磁界と直交する方向の電界を発生させる電極対13,13とを備え、それぞれ発生させた磁界と電界との相互作用により発生するローレンツ力Fを利用して前記ジェット流を得るものである(フレミングの左手の法則)。なお、14は前記超電導磁石12,12を冷却するためのクライオスタットである。
【0003】
例えば図2中のZ方向の矢印の向きに磁界を作用させるとともに、Y方向の矢印の向きに電界を作用させると、X方向の矢印の向きの前記ジェット流が発生するので、この発生したジェット流をダクト11の後方から吐き出すことで船舶等を前進させる推進力が得られる。
【0004】
一方、Y方向の矢印と逆向きに電界を作用させると、X方向の矢印と逆向きの前記ジェット流が発生するので、この発生したジェット流をダクト11の前方へ吐き出すことにより船舶等を後退させる推進力を得ることができる。
【0005】
この超電導磁石装置10で前記ジェット流を発生させる力に対する基本式としての、電磁力により発生するローレンツ力Fは次式で表される。
【0006】
F=J・B・l・b・d(N) ・・・(1)
ここで、Jは電流密度(A/m2)、Bは磁束密度(T)、lは電極長さ(m)、bは電極幅(m)、dは電極間隔(m)である。
【0007】
また、電極間に流れる電流Jeは次式で表される。
【0008】
Je=J・l・b(A) ・・・(2)
F=Je・B・d(N) ・・・(3)
一方、導電性流体に電流を流すために必要な電極電圧Veは次式で表される。
【0009】
Ve=(J/σ+U・B)・d(V) ・・・(4)
ここで、σは導電性流体の導電率(S/m)、Uは推力発生部の平均流速(m/s)である。
【0010】
したがって、導電性流体の通電に必要な電力Peは次式で表される。
【0011】
Pe=Je・Ve(W) ・・・(5)
=Je・(J/σ+U・B)・d ・・・(6)
【非特許文献1】島本ら(3名) “超電導電磁推進船の推進装置” 関西造船協会 第216号 平成3年9月発行
【特許文献1】特開平11−11388号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
ところで、前記非特許文献1での実験船による測定結果では、その計算値とほぼ一致した推進力が得られたものの、実際の船舶等に適用するまでにはいたっていない。この推進力に対応したローレンツ力Fを大きくするためには、前記(1)〜(3)式より、電流密度Jを大きくするか、あるいは、磁束密度Bを大きくすることが有効であると考えられる。しかしながら、電流密度Jを大きくすると電極対13,13の消耗が激しくなるし、付与するエネルギーも大となる。また、現状の技術では、磁束密度Bを大きくすることにも一定の限度がある。
【0013】
さらに、前記(4)〜(6)式より、導電率σを高くすると、電極電圧Veが小さくなり、通電に必要な電力Peが一定であるとすると、電極対13,13間に流れる電流Jeが大きくなるので、前記ローレンツ力Fを大きくするためには、前記(3),(6)式より、導電率σを高くすることも有効であると考えられる。しかしながら、従来技術では、導電性流体として、日本近海での平均導電率σが4.5S/m程度の海水を使用する以上、前記のように超電導磁石装置10で得られるローレンツ力Fは小さいものとなってしまう。また、その使用海域によっては導電率σが変動するため、例えば河口付近で使用すると、導電率σがさらに低くなって、前記超電導磁石装置10で得られるローレンツ力Fはさらに小さくなってしまう。さらに、海水温度によっても、導電率σが変動するため、例えば熱帯地方で使用すると、導電率σがさらに低くなって、前記超電導磁石装置10で得られるローレンツ力Fは極端に小さくなってしまう。これでは、現実の船舶等での使用に耐えうる推進力が得られない。
【0014】
本発明は、このような状況に鑑みなされたものであって、現実の船舶等での使用に耐えうる推進力等を得ることのできる超電導磁石装置を提供することを目的としている。
【課題を解決するための手段】
【0015】
本発明は、所定形状のダクトと、このダクト外に設けられ前記ダクトを横切る磁界を発生させる超電導磁石と、前記ダクト内に設けられ前記磁界と直交する方向の電界を発生させる電極対とを備え、それぞれ発生させた磁界と電界との相互作用により発生する力を利用して、前記ダクト内に充填された導電性流体を流動させるように構成された超電導磁石装置であって、前記ダクトを閉ループで形成するとともに、前記導電性流体の流動により回転駆動されるハイドロリックモータを備えたことを特徴とするものである。
【0016】
請求項2記載の発明のように、前記ダクトと、前記超電導磁石と、前記電極対と、前記ハイドロリックモータとを搭載した船舶又は水中航走体に推進力を付与する推進器を備え、この推進器を前記ハイドロリックモータに連結することが好ましい。
【0017】
請求項3記載の発明のように、前記ハイドロリックモータに連結した発電機を備えることが好ましい。
【0018】
請求項4記載の発明のように、前記導電性流体として、海水よりも導電率の高い流体を使用することが好ましい。
【発明の効果】
【0019】
本発明によれば、前記ダクトが閉ループで形成されるとともに、前記導電性流体の流動により回転駆動されるハイドロリックモータが備えられたので、磁界と電界との相互作用により発生する力を大きくするために、導電率σが高い導電性流体を使用することで、電流密度Jや磁束密度Bを大きくすることなく、前記発生する力による導電性流体の流動エネルギーを大きくすることができる。
【0020】
また、この場合には、従来技術の如く導電性流体として海水を使用する開ループの場合に比べて、前記超電導磁石装置で得られるローレンツ力Fが安定している。例えば、その使用海域によっても導電性流体の導電率σは変動しないため、例えば河口付近で使用するとしても、前記超電導磁石装置で得られるローレンツ力Fは小さくならない。さらに、海水温度によっても、導電性流体の導電率σは変動しないため、例えば熱帯地方で使用するとしても、前記超電導磁石装置で得られるローレンツ力Fは小さくならない。したがって、この導電性流体の流動エネルギーをハイドロリックモータで取り出すことにより、現実の船舶での使用に耐えうる推進力等が得られるようになる。
【0021】
請求項2記載の発明によれば、前記ダクトと、前記超電導磁石と、前記電極対と、前記ハイドロリックモータとを搭載した船舶又は水中航走体に推進力を付与する推進器が備えられ、この推進器が前記ハイドロリックモータに連結されたので、前記導電性流体の流動エネルギーをハイドロリックモータで回転駆動エネルギーに変換し、この回転駆動エネルギーを推進器でさらに船舶等の推進力に変換することができる。この場合には、現実の船舶等での使用に耐えうる推進力が直接得られるようになる。
【0022】
請求項3記載の発明によれば、前記ハイドロリックモータに連結した発電機が備えられたので、前記導電性流体の流動エネルギーをハイドロリックモータで回転駆動エネルギーに変換し、この回転駆動エネルギーを発電機でさらに電気エネルギーに変換することができる。
【0023】
この電気エネルギーを例えば前記推進器に連結した電動機でさらに船舶等の推進力に変換し、或いは前記超電導磁石や電極対やその他設備への給電等に使用することで、現実の船舶等での使用に耐えうる推進力が得られるようになるとともに、船舶等の全体としてのエネルギー効率を向上させることができる。
【0024】
請求項4記載の発明によれば、前記導電性流体として、海水よりも導電率の高い流体が使用されるので、電流密度Jや磁束密度Bを大きくすることなく、磁界と電界との相互作用により発生するローレンツ力Fを大きくし、これにより、導電性流体の流動エネルギーを確実に大きくすることができる。
【発明を実施するための最良の形態】
【0025】
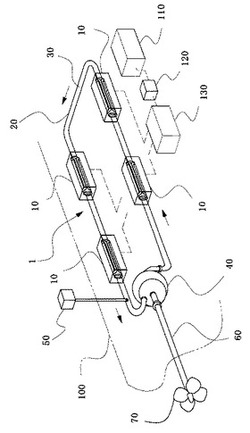
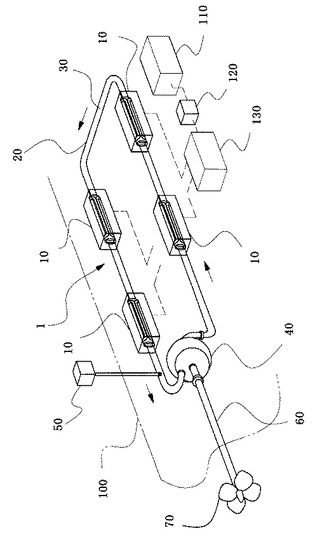
図1は本発明の一実施形態に係る超電導磁石装置10を搭載した船舶1の推進動力系を示す斜視図、図2は超電導磁石装置10の詳細構成を示す斜視図である。
【0026】
この船舶1では、図1に示すように、エンジンルーム100内に配置された4基の超電導磁石装置10,10,10,10が、それぞれのダクト11(図2参照。)の前後に接続される配管20でもってシリーズに接続されて、いわゆる閉ループを構成している。各超電導磁石装置10では、超電導磁石12,12が、その超電導現象による永久電流での運転ができる程度の低温となるようにクライオスタット14でそれぞれ冷却されている。
【0027】
この閉ループを構成する配管20中には、導電性流体30が充填されており、この導電性流体30の流動エネルギーを回転駆動エネルギーに変換するためのハイドロリックモータ40と、前記配管20中に閉じ込められた導電性流体30の体積変化等を許容するための重力タンク50とが組み込まれている。
【0028】
超電導磁石装置10は、前述した従来技術と同様に、その前方から取り込んだ導電性流体30を後方からジェット流として吐き出すためのダクト11と、このダクト11の外周に設けられ前記ダクト11を横切る磁界を発生させる超電導磁石12,12と、前記ダクト11内に設けられ前記磁界と直交する方向の電界を発生させる電極対13,13とを備え、それぞれ発生させた磁界と電界との相互作用により発生させたローレンツ力(力)Fで前記ジェット流を得るものである(フレミングの左手の法則)。
【0029】
ただし、ここでは4基の超電導磁石装置10,10,10,10の各ダクト11,11,11,11の前後をそれぞれ配管20でシリーズに接続しており、各超電導磁石装置10,10,10,10でそれぞれ発生させたローレンツ力Fでもって導電性流体30に流動エネルギーを付与することで、その導電性流体30を次第に加速することにより、高速のジェット流を発生させるようになっている。ダクト11の形状は、例えば円筒形状であって、その内径は前記ジェット流の最大通過流量等に応じて設定される。
【0030】
ハイドロリックモータ40は、前記発生させた高速のジェット流をこのハイドロリックモータ40の上流側の配管20から取り込んで、該ハイドロリックモータ40中の図示しないインペラを回転させることにより、導電性流体30の流動エネルギーを回転エネルギーに変換するものである。
【0031】
そして、ハイドロリックモータ40中のインペラを回転させた導電性流体30を、該ハイドロリックモータ40の下流側の配管20から前記超電導磁石装置10に戻すことで、導電性流体30が繰り返し使用(循環)されるようになっている。このため、導電性流体30としては、従来技術の如き海水(日本近海の平均導電率σが4.5S/m程度である。)に限定されず、この海水よりもさらに高い導電率σを有する流体、例えば濃塩水、塩化カリウム(KCl)等の塩素化合物や水銀等を使用できる。
【0032】
このハイドロリックモータ40の前記インペラの回転軸はプロペラシャフト60を介して推進器としてのスクリュープロペラ70に連結されているので、このスクリュープロペラ70の回転により発生する推進力でもって、船舶1を前進又は後退させるようになっている。
【0033】
重力タンク50は、各超電導磁石装置10,10,10,10の上方に配置され、かつハイドロリックモータ40の導電性流体30の流入側に接続されている。そして、このハイドロリックモータ40の導電性流体30の流入側に所定の圧力をかけることで、同ハイドロリックモータ40のインペラにおけるキャビテーションの発生を防止するとともに、各超電導磁石装置10,10,10,10の起動後の導電性流体30の循環に起因する発熱により導電性流体30が体積膨張するのを許容し、かつ該各超電導磁石装置10,10,10,10の停止後の導電性流体30の放熱により該導電性流体30が体積縮小することをも許容するようになっている。なお、この重力タンク50から配管20内への導電性流体30の充填が可能である。
【0034】
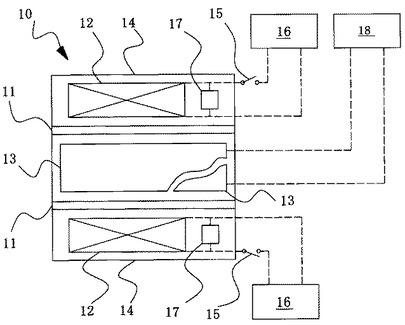
引き続き、この船舶1における超電導磁石装置10の電気制御系統についての説明を加える。電気系統については前記図1に示しているが、電気制御系統については図3に示すとおりである。なお、図3は超電導磁石装置10の電気制御系統を示す機能ブロック図である。
【0035】
船舶1は、図1に示すように、各超電導磁石装置10,10,10,10への給電電力(交流電力)を発生させるためのディーゼル発電機110と、このディーゼル発電機110で発生させた交流電力を直流電力に変換するサイクロコンバータ120と、この変換された直流電力を各超電導磁石装置10,10,10,10にバランスよく給電するための配電盤130とを搭載している。
【0036】
この配電盤130の一部は、図3に示すように、超電導磁石装置10のダクト11の外周の上下に設けられた超電導磁石12,12の起動時に、この超電導磁石12,12とそれぞれシリーズに接続されたスイッチ15,15を介して超電導磁石12,12にそれぞれ初期給電する直流電源16,16として機能する。図3中、スイッチ15,15は、開状態を示している。
【0037】
そして、超電導磁石12,12の起動後は、超電導磁石12,12とパラレルに接続された永久電流スイッチ17,17を介して超電導磁石12,12にそれぞれ永久電流を流すようになっている。なお、超電導磁石12,12は、例えばNb−Ti合金等の超電導ケーブルを多重に巻回してなるものであり、それぞれダクト11の上下に配置されて対向する2対のNS極を構成するいわゆるダイポール型超電導磁石をなしている。永久電流スイッチ17,17は、前記と同様の超電導ケーブルからなり、クライオスタット14で冷却されることで、超電導磁石12,12の回路を閉状態とし、これを図示しないヒータで加熱することで、超電導磁石12,12の回路を開状態とするものである。
【0038】
この永久電流により、超電導磁石12,12は、図3中の上側から下側に向かう磁界が安定して発生するようになる(図2中のZ方向の矢印の向きに対応する)。また、前記配電盤130の他部は、図3に示すように、超電導磁石装置10のダクト11内に設けられた平行電極対13,13に給電する直流電源18として機能する。
【0039】
この直流電流の向きを図示しない切り替えスイッチを切り替え操作することで、図3中の手前側から奥側に向かう電界(図2中のY方向の矢印の向きに対応する。)又はその逆向きの電界が発生するようになっている。
【0040】
そして、前記超電導磁石12,12に通電することで磁界を作用させるとともに、前記電極対13,13に通電することで電界を作用させると、図3中の右側から左側に向かうローレンツ力F又はその逆向きのローレンツ力Fが発生し、これにより同右側から左側に向かうジェット流(図2中のX方向の矢印の向きに対応する。)又はその逆向きの前記ジェット流が発生するようになっている。
【0041】
このジェット流により、ハイドロリックモータ40の回転軸はプロペラシャフト60を介してスクリュープロペラ70を回転させる。このスクリュープロペラ70の回転により発生する推進力でもって、船舶1を前進又は後退させることができる。このとき、図示しない操作レバーを操作することにより、直流電源18からの直流電流強さを変化させることで、前記ローレンツ力Fの大きさを制御し、これにより前記船舶1の推進力の大きさを制御することができるようになっている。
【0042】
以下、本超電導磁石装置10の典型的な運転手順について図1〜図3を参照して説明する。なお、初期状態では、図3中の直流電源16,16にそれぞれシリーズに接続されたスイッチ15,15と、直流電源16,16にそれぞれパラレルに接続された永久電流スイッチ17,17とがともに開状態であり、直流電源18に接続された図示しない切り替えスイッチが中立状態となっているものとする。
【0043】
まず、図3において、スイッチ15,15を閉状態として、永久電流スイッチ17,17を開状態のままとする。すると、直流電源16,16から超電導磁石12,12に直流電流が流れ始めて、上方から下方に向かう磁界(図2中のZ方向の矢印の向きに対応する。)が発生する。この直流電流が予め設定された所定値に達すると、今度は前記スイッチ15,15を開状態として、永久電流スイッチ17,17を閉状態とする。すると、超電導磁石12,12には永久電流が流れるようになり、前記磁界が安定して発生するようになる。
【0044】
ついで、前記切り替えスイッチを操作することで、直流電源18から手前側の電極13をプラス極として、奥側の電極13をマイナス極とするような直流電流が流れるようにする。このとき、図3中の手前側から奥側に向かう電界が発生する(図2中のY方向の矢印の向きに対応する)。
【0045】
この磁界と電界との相互作用により、図3中の右側から左側に向かうローレンツ力Fが発生する。このローレンツ力Fによりダクト11中に充填された導電性流体30が右側から左側に向かうジェット流となる(図2中のZ方向の矢印の向きに対応する)。このジェット流は、4基の超電導磁石装置10,10,10,10で同方向に順次に加速されて高速化される。
【0046】
この高速化したジェット流が図1のハイドロリックモータ40に流入して、その図示しないインペラを例えば時計回りに回転させると、その回転軸に連結されたプロペラシャフト60を介してスクリュープロペラ70が同方向に回転する。すると、船舶1には前方への推進力が発生し、この推進力で船舶1は前進する。このとき、図示しない操作レバーを操作することにより、直流電源18からの直流電流強さを変化させることで、前記ローレンツ力Fの大きさを制御し、これにより前記船舶1の推進力を制御する。
【0047】
ついで、図3において、前記切り替えスイッチを操作することで、直流電源18から奥側の電極13をプラス極として、手前側の電極13をマイナス極とするような直流電流が流れるようにする。このとき、図3中の奥側から手前側に向かう電界が発生する(図2中のY方向の矢印の向きと逆向きに対応する)。このときにも、超電導磁石12,12で発生する磁界は、上方から下方に向かっている(図2中のZ方向の矢印の向きに対応する)。
【0048】
この磁界と電界との相互作用により、図3中の左側から右側に向かうローレンツ力Fが発生する。このローレンツ力Fによりダクト11中に充填された導電性流体30が左側から右側に向かうジェット流となる(図2中のX方向の矢印の向きと逆向きに対応する)。このジェット流は、4基の超電導磁石装置10,10,10,10で同方向に順次に加速されて高速化される。
【0049】
この高速化したジェット流が図1のハイドロリックモータ40に流入して、その図示しないインペラを反時計回りに回転させると、その回転軸に連結されたプロペラシャフト60を介してスクリュープロペラ70が同方向に回転する。すると、船舶1には後方への推進力が発生し、この推進力で船舶1は後退する。このときにも、図示しない操作レバーを操作することにより、直流電源18からの直流電流強さを変化させることで、前記ローレンツ力Fの大きさを制御し、これにより前記船舶1の推進力を制御する。
【0050】
そして、各スイッチを初期状態とすることで、全ての操作を終了する。
【0051】
以上説明したように、本実施形態によれば、4基の超電導磁石装置10,10,10,10のダクト11,11,11,11の前後が配管20でそれぞれシリーズに接続された閉ループが形成されるとともに、この閉ループ内に充填された導電性流体30の流動により回転駆動されるハイドロリックモータ40が備えられているので、それぞれ磁界と電界との相互作用により発生するローレンツ力Fを大きくするために、導電率σが海水よりも高い導電性流体30を使用することで、電流密度Jや磁束密度Bを大きくすることなく、前記発生するローレンツ力Fによる導電性流体30の流動エネルギーを大きくすることができる。
【0052】
この場合、従来技術の如く海水を使用する場合に比べて、前記超電導磁石装置10で得られるローレンツ力Fが常に大きくなり、その使用海域によっても導電性流体30の導電率σは変動しないため、例えば河口付近で使用するとしても、前記超電導磁石装置10で得られるローレンツ力Fは小さくならない。さらに、海水温度によっても、導電性流体30の導電率σは変動しないため、例えば熱帯地方で使用するとしても、前記超電導磁石装置10で得られるローレンツ力Fは小さくならない。したがって、この導電性流体30の流動エネルギーをハイドロリックモータ40で取り出すことにより、現実の船舶1での使用に耐えうる推進力が得られるようになる。
【0053】
より具体的には、本実施形態では、前記超電導磁石装置10,10,10,10を搭載した船舶1に推進力を付与するスクリュープロペラ70が備えられ、このスクリュープロペラ70が前記ハイドロリックモータ40に連結されているので、導電性流体30の流動エネルギーをハイドロリックモータ40で回転駆動エネルギーに変換し、この回転駆動エネルギーをスクリュープロペラ70でさらに船舶1の推進力に変換することができる。この場合には、現実の船舶1での使用に耐えうる推進力が直接得られるようになる。
【0054】
なお、上記実施形態では、前記ハイドロリックモータ40をスクリュープロペラ70に連結したが、このスクリュープロペラ70とともに、あるいはスクリュープロペラ70に代えて前記ハイドロリックモータ40を連結した発電機を備えることとしてもよい。その場合には、前記導電性流体30の流動エネルギーをハイドロリックモータ40で回転駆動エネルギーに変換し、この回転駆動エネルギーを前記発電機でさらに電気エネルギーに変換することができる。
【0055】
この電気エネルギーを例えばスクリュープロペラ70に連結した電動機でさらに船舶1の推進力に変換し、或いは超電導磁石12,12や電極対13,13やその他設備への給電等に使用することで、現実の船舶1での使用に耐えうる推進力が得られるようになるとともに、船舶1の全体としてのエネルギー効率を向上させることができる。
【0056】
また、上記実施形態では、船舶1に4基シリーズに接続された超電導磁石装置10,10,10,10を搭載した例を説明したが、これらの超電導磁石装置10,10,10,10をパラレルに接続してもよい。その場合には、漏れ磁界を減少させるような配置が可能となるといったメリットがあるものの、前記シリーズに接続した場合に比べて推進効率は若干低下することは否めない。さらには、超電導磁石装置10の基数も4基には限定されないし、超電導磁石装置10に電磁シールドを設けてもよい。
【0057】
また、上記実施形態では、磁束密度Bの大きさは、現状の技術における一定の制限があるものとしているが、将来さらに大きな磁束密度Bが得られるようになれば、本発明の適用はより有効なものとなる。この場合には、さらに大きな磁束密度Bと、さらに高い導電率σとの相乗効果により、さらに大きな推進力が得られることになることはいうまでもない。
【0058】
この場合には、たとえ海水の如く低い導電率σの流体であっても、かかる大きな磁束密度Bがあれば、本発明の超電導磁石装置10に使用することができるようになる。その場合、電流密度Jの大きさによっては、海水の電気分解により水素ガスや塩素ガスが発生し、これらのガスによりハイドロリックモータ40のインペラに有害なキャビテーションが発生することがあるが、例えば重力タンク50でかかる水素を連続的にループ外に取り出すようにすることで、かかる問題は解消することができるものと考えられる。
【0059】
また、上記実施形態では、超電導磁石装置10を船舶1に搭載した例について説明したが、本発明の適用範囲はこれに限定されず、例えば水中航走体や陸上走行体への適用はもちろん、さらには陸上又は舶上の発電装置等への応用も可能である。
【図面の簡単な説明】
【0060】
【図1】本発明の一実施形態に係る超電導磁石装置を搭載した船舶の推進動力系を示す概念図である。
【図2】超電導磁石装置の詳細構成を示す斜視図である。
【図3】超電導磁石装置の電気制御系統を示す機能ブロック図である。
【符号の説明】
【0061】
1 船舶
10 超電導磁石装置
11 ダクト
12 超電導磁石
13 電極
14 クライオスタット
15 スイッチ
16 直流電源
17 永久電流スイッチ
18 直流電源
20 配管
30 導電性流体
40 ハイドロリックモータ
50 重力タンク
60 プロペラシャフト
70 スクリュープロペラ(推進器に相当する。)
100 エンジンルーム
110 ディーゼル発電機
120 サイクロコンバータ
130 配電盤
【技術分野】
【0001】
本発明は、例えば船舶や水中航走体に搭載される超電導磁石装置に関するものである。
【背景技術】
【0002】
例えば非特許文献1、特許文献1に記載の船舶等に用いられる従来の超電導磁石装置10は、図2に示すように、その前方から海水を吸い込んで後方からジェット流として吐き出すためのダクト11と、このダクト11の外周に設けられ前記ダクト11を横切る磁界を発生させる超電導磁石12,12と、前記ダクト11内に設けられ前記磁界と直交する方向の電界を発生させる電極対13,13とを備え、それぞれ発生させた磁界と電界との相互作用により発生するローレンツ力Fを利用して前記ジェット流を得るものである(フレミングの左手の法則)。なお、14は前記超電導磁石12,12を冷却するためのクライオスタットである。
【0003】
例えば図2中のZ方向の矢印の向きに磁界を作用させるとともに、Y方向の矢印の向きに電界を作用させると、X方向の矢印の向きの前記ジェット流が発生するので、この発生したジェット流をダクト11の後方から吐き出すことで船舶等を前進させる推進力が得られる。
【0004】
一方、Y方向の矢印と逆向きに電界を作用させると、X方向の矢印と逆向きの前記ジェット流が発生するので、この発生したジェット流をダクト11の前方へ吐き出すことにより船舶等を後退させる推進力を得ることができる。
【0005】
この超電導磁石装置10で前記ジェット流を発生させる力に対する基本式としての、電磁力により発生するローレンツ力Fは次式で表される。
【0006】
F=J・B・l・b・d(N) ・・・(1)
ここで、Jは電流密度(A/m2)、Bは磁束密度(T)、lは電極長さ(m)、bは電極幅(m)、dは電極間隔(m)である。
【0007】
また、電極間に流れる電流Jeは次式で表される。
【0008】
Je=J・l・b(A) ・・・(2)
F=Je・B・d(N) ・・・(3)
一方、導電性流体に電流を流すために必要な電極電圧Veは次式で表される。
【0009】
Ve=(J/σ+U・B)・d(V) ・・・(4)
ここで、σは導電性流体の導電率(S/m)、Uは推力発生部の平均流速(m/s)である。
【0010】
したがって、導電性流体の通電に必要な電力Peは次式で表される。
【0011】
Pe=Je・Ve(W) ・・・(5)
=Je・(J/σ+U・B)・d ・・・(6)
【非特許文献1】島本ら(3名) “超電導電磁推進船の推進装置” 関西造船協会 第216号 平成3年9月発行
【特許文献1】特開平11−11388号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
ところで、前記非特許文献1での実験船による測定結果では、その計算値とほぼ一致した推進力が得られたものの、実際の船舶等に適用するまでにはいたっていない。この推進力に対応したローレンツ力Fを大きくするためには、前記(1)〜(3)式より、電流密度Jを大きくするか、あるいは、磁束密度Bを大きくすることが有効であると考えられる。しかしながら、電流密度Jを大きくすると電極対13,13の消耗が激しくなるし、付与するエネルギーも大となる。また、現状の技術では、磁束密度Bを大きくすることにも一定の限度がある。
【0013】
さらに、前記(4)〜(6)式より、導電率σを高くすると、電極電圧Veが小さくなり、通電に必要な電力Peが一定であるとすると、電極対13,13間に流れる電流Jeが大きくなるので、前記ローレンツ力Fを大きくするためには、前記(3),(6)式より、導電率σを高くすることも有効であると考えられる。しかしながら、従来技術では、導電性流体として、日本近海での平均導電率σが4.5S/m程度の海水を使用する以上、前記のように超電導磁石装置10で得られるローレンツ力Fは小さいものとなってしまう。また、その使用海域によっては導電率σが変動するため、例えば河口付近で使用すると、導電率σがさらに低くなって、前記超電導磁石装置10で得られるローレンツ力Fはさらに小さくなってしまう。さらに、海水温度によっても、導電率σが変動するため、例えば熱帯地方で使用すると、導電率σがさらに低くなって、前記超電導磁石装置10で得られるローレンツ力Fは極端に小さくなってしまう。これでは、現実の船舶等での使用に耐えうる推進力が得られない。
【0014】
本発明は、このような状況に鑑みなされたものであって、現実の船舶等での使用に耐えうる推進力等を得ることのできる超電導磁石装置を提供することを目的としている。
【課題を解決するための手段】
【0015】
本発明は、所定形状のダクトと、このダクト外に設けられ前記ダクトを横切る磁界を発生させる超電導磁石と、前記ダクト内に設けられ前記磁界と直交する方向の電界を発生させる電極対とを備え、それぞれ発生させた磁界と電界との相互作用により発生する力を利用して、前記ダクト内に充填された導電性流体を流動させるように構成された超電導磁石装置であって、前記ダクトを閉ループで形成するとともに、前記導電性流体の流動により回転駆動されるハイドロリックモータを備えたことを特徴とするものである。
【0016】
請求項2記載の発明のように、前記ダクトと、前記超電導磁石と、前記電極対と、前記ハイドロリックモータとを搭載した船舶又は水中航走体に推進力を付与する推進器を備え、この推進器を前記ハイドロリックモータに連結することが好ましい。
【0017】
請求項3記載の発明のように、前記ハイドロリックモータに連結した発電機を備えることが好ましい。
【0018】
請求項4記載の発明のように、前記導電性流体として、海水よりも導電率の高い流体を使用することが好ましい。
【発明の効果】
【0019】
本発明によれば、前記ダクトが閉ループで形成されるとともに、前記導電性流体の流動により回転駆動されるハイドロリックモータが備えられたので、磁界と電界との相互作用により発生する力を大きくするために、導電率σが高い導電性流体を使用することで、電流密度Jや磁束密度Bを大きくすることなく、前記発生する力による導電性流体の流動エネルギーを大きくすることができる。
【0020】
また、この場合には、従来技術の如く導電性流体として海水を使用する開ループの場合に比べて、前記超電導磁石装置で得られるローレンツ力Fが安定している。例えば、その使用海域によっても導電性流体の導電率σは変動しないため、例えば河口付近で使用するとしても、前記超電導磁石装置で得られるローレンツ力Fは小さくならない。さらに、海水温度によっても、導電性流体の導電率σは変動しないため、例えば熱帯地方で使用するとしても、前記超電導磁石装置で得られるローレンツ力Fは小さくならない。したがって、この導電性流体の流動エネルギーをハイドロリックモータで取り出すことにより、現実の船舶での使用に耐えうる推進力等が得られるようになる。
【0021】
請求項2記載の発明によれば、前記ダクトと、前記超電導磁石と、前記電極対と、前記ハイドロリックモータとを搭載した船舶又は水中航走体に推進力を付与する推進器が備えられ、この推進器が前記ハイドロリックモータに連結されたので、前記導電性流体の流動エネルギーをハイドロリックモータで回転駆動エネルギーに変換し、この回転駆動エネルギーを推進器でさらに船舶等の推進力に変換することができる。この場合には、現実の船舶等での使用に耐えうる推進力が直接得られるようになる。
【0022】
請求項3記載の発明によれば、前記ハイドロリックモータに連結した発電機が備えられたので、前記導電性流体の流動エネルギーをハイドロリックモータで回転駆動エネルギーに変換し、この回転駆動エネルギーを発電機でさらに電気エネルギーに変換することができる。
【0023】
この電気エネルギーを例えば前記推進器に連結した電動機でさらに船舶等の推進力に変換し、或いは前記超電導磁石や電極対やその他設備への給電等に使用することで、現実の船舶等での使用に耐えうる推進力が得られるようになるとともに、船舶等の全体としてのエネルギー効率を向上させることができる。
【0024】
請求項4記載の発明によれば、前記導電性流体として、海水よりも導電率の高い流体が使用されるので、電流密度Jや磁束密度Bを大きくすることなく、磁界と電界との相互作用により発生するローレンツ力Fを大きくし、これにより、導電性流体の流動エネルギーを確実に大きくすることができる。
【発明を実施するための最良の形態】
【0025】
図1は本発明の一実施形態に係る超電導磁石装置10を搭載した船舶1の推進動力系を示す斜視図、図2は超電導磁石装置10の詳細構成を示す斜視図である。
【0026】
この船舶1では、図1に示すように、エンジンルーム100内に配置された4基の超電導磁石装置10,10,10,10が、それぞれのダクト11(図2参照。)の前後に接続される配管20でもってシリーズに接続されて、いわゆる閉ループを構成している。各超電導磁石装置10では、超電導磁石12,12が、その超電導現象による永久電流での運転ができる程度の低温となるようにクライオスタット14でそれぞれ冷却されている。
【0027】
この閉ループを構成する配管20中には、導電性流体30が充填されており、この導電性流体30の流動エネルギーを回転駆動エネルギーに変換するためのハイドロリックモータ40と、前記配管20中に閉じ込められた導電性流体30の体積変化等を許容するための重力タンク50とが組み込まれている。
【0028】
超電導磁石装置10は、前述した従来技術と同様に、その前方から取り込んだ導電性流体30を後方からジェット流として吐き出すためのダクト11と、このダクト11の外周に設けられ前記ダクト11を横切る磁界を発生させる超電導磁石12,12と、前記ダクト11内に設けられ前記磁界と直交する方向の電界を発生させる電極対13,13とを備え、それぞれ発生させた磁界と電界との相互作用により発生させたローレンツ力(力)Fで前記ジェット流を得るものである(フレミングの左手の法則)。
【0029】
ただし、ここでは4基の超電導磁石装置10,10,10,10の各ダクト11,11,11,11の前後をそれぞれ配管20でシリーズに接続しており、各超電導磁石装置10,10,10,10でそれぞれ発生させたローレンツ力Fでもって導電性流体30に流動エネルギーを付与することで、その導電性流体30を次第に加速することにより、高速のジェット流を発生させるようになっている。ダクト11の形状は、例えば円筒形状であって、その内径は前記ジェット流の最大通過流量等に応じて設定される。
【0030】
ハイドロリックモータ40は、前記発生させた高速のジェット流をこのハイドロリックモータ40の上流側の配管20から取り込んで、該ハイドロリックモータ40中の図示しないインペラを回転させることにより、導電性流体30の流動エネルギーを回転エネルギーに変換するものである。
【0031】
そして、ハイドロリックモータ40中のインペラを回転させた導電性流体30を、該ハイドロリックモータ40の下流側の配管20から前記超電導磁石装置10に戻すことで、導電性流体30が繰り返し使用(循環)されるようになっている。このため、導電性流体30としては、従来技術の如き海水(日本近海の平均導電率σが4.5S/m程度である。)に限定されず、この海水よりもさらに高い導電率σを有する流体、例えば濃塩水、塩化カリウム(KCl)等の塩素化合物や水銀等を使用できる。
【0032】
このハイドロリックモータ40の前記インペラの回転軸はプロペラシャフト60を介して推進器としてのスクリュープロペラ70に連結されているので、このスクリュープロペラ70の回転により発生する推進力でもって、船舶1を前進又は後退させるようになっている。
【0033】
重力タンク50は、各超電導磁石装置10,10,10,10の上方に配置され、かつハイドロリックモータ40の導電性流体30の流入側に接続されている。そして、このハイドロリックモータ40の導電性流体30の流入側に所定の圧力をかけることで、同ハイドロリックモータ40のインペラにおけるキャビテーションの発生を防止するとともに、各超電導磁石装置10,10,10,10の起動後の導電性流体30の循環に起因する発熱により導電性流体30が体積膨張するのを許容し、かつ該各超電導磁石装置10,10,10,10の停止後の導電性流体30の放熱により該導電性流体30が体積縮小することをも許容するようになっている。なお、この重力タンク50から配管20内への導電性流体30の充填が可能である。
【0034】
引き続き、この船舶1における超電導磁石装置10の電気制御系統についての説明を加える。電気系統については前記図1に示しているが、電気制御系統については図3に示すとおりである。なお、図3は超電導磁石装置10の電気制御系統を示す機能ブロック図である。
【0035】
船舶1は、図1に示すように、各超電導磁石装置10,10,10,10への給電電力(交流電力)を発生させるためのディーゼル発電機110と、このディーゼル発電機110で発生させた交流電力を直流電力に変換するサイクロコンバータ120と、この変換された直流電力を各超電導磁石装置10,10,10,10にバランスよく給電するための配電盤130とを搭載している。
【0036】
この配電盤130の一部は、図3に示すように、超電導磁石装置10のダクト11の外周の上下に設けられた超電導磁石12,12の起動時に、この超電導磁石12,12とそれぞれシリーズに接続されたスイッチ15,15を介して超電導磁石12,12にそれぞれ初期給電する直流電源16,16として機能する。図3中、スイッチ15,15は、開状態を示している。
【0037】
そして、超電導磁石12,12の起動後は、超電導磁石12,12とパラレルに接続された永久電流スイッチ17,17を介して超電導磁石12,12にそれぞれ永久電流を流すようになっている。なお、超電導磁石12,12は、例えばNb−Ti合金等の超電導ケーブルを多重に巻回してなるものであり、それぞれダクト11の上下に配置されて対向する2対のNS極を構成するいわゆるダイポール型超電導磁石をなしている。永久電流スイッチ17,17は、前記と同様の超電導ケーブルからなり、クライオスタット14で冷却されることで、超電導磁石12,12の回路を閉状態とし、これを図示しないヒータで加熱することで、超電導磁石12,12の回路を開状態とするものである。
【0038】
この永久電流により、超電導磁石12,12は、図3中の上側から下側に向かう磁界が安定して発生するようになる(図2中のZ方向の矢印の向きに対応する)。また、前記配電盤130の他部は、図3に示すように、超電導磁石装置10のダクト11内に設けられた平行電極対13,13に給電する直流電源18として機能する。
【0039】
この直流電流の向きを図示しない切り替えスイッチを切り替え操作することで、図3中の手前側から奥側に向かう電界(図2中のY方向の矢印の向きに対応する。)又はその逆向きの電界が発生するようになっている。
【0040】
そして、前記超電導磁石12,12に通電することで磁界を作用させるとともに、前記電極対13,13に通電することで電界を作用させると、図3中の右側から左側に向かうローレンツ力F又はその逆向きのローレンツ力Fが発生し、これにより同右側から左側に向かうジェット流(図2中のX方向の矢印の向きに対応する。)又はその逆向きの前記ジェット流が発生するようになっている。
【0041】
このジェット流により、ハイドロリックモータ40の回転軸はプロペラシャフト60を介してスクリュープロペラ70を回転させる。このスクリュープロペラ70の回転により発生する推進力でもって、船舶1を前進又は後退させることができる。このとき、図示しない操作レバーを操作することにより、直流電源18からの直流電流強さを変化させることで、前記ローレンツ力Fの大きさを制御し、これにより前記船舶1の推進力の大きさを制御することができるようになっている。
【0042】
以下、本超電導磁石装置10の典型的な運転手順について図1〜図3を参照して説明する。なお、初期状態では、図3中の直流電源16,16にそれぞれシリーズに接続されたスイッチ15,15と、直流電源16,16にそれぞれパラレルに接続された永久電流スイッチ17,17とがともに開状態であり、直流電源18に接続された図示しない切り替えスイッチが中立状態となっているものとする。
【0043】
まず、図3において、スイッチ15,15を閉状態として、永久電流スイッチ17,17を開状態のままとする。すると、直流電源16,16から超電導磁石12,12に直流電流が流れ始めて、上方から下方に向かう磁界(図2中のZ方向の矢印の向きに対応する。)が発生する。この直流電流が予め設定された所定値に達すると、今度は前記スイッチ15,15を開状態として、永久電流スイッチ17,17を閉状態とする。すると、超電導磁石12,12には永久電流が流れるようになり、前記磁界が安定して発生するようになる。
【0044】
ついで、前記切り替えスイッチを操作することで、直流電源18から手前側の電極13をプラス極として、奥側の電極13をマイナス極とするような直流電流が流れるようにする。このとき、図3中の手前側から奥側に向かう電界が発生する(図2中のY方向の矢印の向きに対応する)。
【0045】
この磁界と電界との相互作用により、図3中の右側から左側に向かうローレンツ力Fが発生する。このローレンツ力Fによりダクト11中に充填された導電性流体30が右側から左側に向かうジェット流となる(図2中のZ方向の矢印の向きに対応する)。このジェット流は、4基の超電導磁石装置10,10,10,10で同方向に順次に加速されて高速化される。
【0046】
この高速化したジェット流が図1のハイドロリックモータ40に流入して、その図示しないインペラを例えば時計回りに回転させると、その回転軸に連結されたプロペラシャフト60を介してスクリュープロペラ70が同方向に回転する。すると、船舶1には前方への推進力が発生し、この推進力で船舶1は前進する。このとき、図示しない操作レバーを操作することにより、直流電源18からの直流電流強さを変化させることで、前記ローレンツ力Fの大きさを制御し、これにより前記船舶1の推進力を制御する。
【0047】
ついで、図3において、前記切り替えスイッチを操作することで、直流電源18から奥側の電極13をプラス極として、手前側の電極13をマイナス極とするような直流電流が流れるようにする。このとき、図3中の奥側から手前側に向かう電界が発生する(図2中のY方向の矢印の向きと逆向きに対応する)。このときにも、超電導磁石12,12で発生する磁界は、上方から下方に向かっている(図2中のZ方向の矢印の向きに対応する)。
【0048】
この磁界と電界との相互作用により、図3中の左側から右側に向かうローレンツ力Fが発生する。このローレンツ力Fによりダクト11中に充填された導電性流体30が左側から右側に向かうジェット流となる(図2中のX方向の矢印の向きと逆向きに対応する)。このジェット流は、4基の超電導磁石装置10,10,10,10で同方向に順次に加速されて高速化される。
【0049】
この高速化したジェット流が図1のハイドロリックモータ40に流入して、その図示しないインペラを反時計回りに回転させると、その回転軸に連結されたプロペラシャフト60を介してスクリュープロペラ70が同方向に回転する。すると、船舶1には後方への推進力が発生し、この推進力で船舶1は後退する。このときにも、図示しない操作レバーを操作することにより、直流電源18からの直流電流強さを変化させることで、前記ローレンツ力Fの大きさを制御し、これにより前記船舶1の推進力を制御する。
【0050】
そして、各スイッチを初期状態とすることで、全ての操作を終了する。
【0051】
以上説明したように、本実施形態によれば、4基の超電導磁石装置10,10,10,10のダクト11,11,11,11の前後が配管20でそれぞれシリーズに接続された閉ループが形成されるとともに、この閉ループ内に充填された導電性流体30の流動により回転駆動されるハイドロリックモータ40が備えられているので、それぞれ磁界と電界との相互作用により発生するローレンツ力Fを大きくするために、導電率σが海水よりも高い導電性流体30を使用することで、電流密度Jや磁束密度Bを大きくすることなく、前記発生するローレンツ力Fによる導電性流体30の流動エネルギーを大きくすることができる。
【0052】
この場合、従来技術の如く海水を使用する場合に比べて、前記超電導磁石装置10で得られるローレンツ力Fが常に大きくなり、その使用海域によっても導電性流体30の導電率σは変動しないため、例えば河口付近で使用するとしても、前記超電導磁石装置10で得られるローレンツ力Fは小さくならない。さらに、海水温度によっても、導電性流体30の導電率σは変動しないため、例えば熱帯地方で使用するとしても、前記超電導磁石装置10で得られるローレンツ力Fは小さくならない。したがって、この導電性流体30の流動エネルギーをハイドロリックモータ40で取り出すことにより、現実の船舶1での使用に耐えうる推進力が得られるようになる。
【0053】
より具体的には、本実施形態では、前記超電導磁石装置10,10,10,10を搭載した船舶1に推進力を付与するスクリュープロペラ70が備えられ、このスクリュープロペラ70が前記ハイドロリックモータ40に連結されているので、導電性流体30の流動エネルギーをハイドロリックモータ40で回転駆動エネルギーに変換し、この回転駆動エネルギーをスクリュープロペラ70でさらに船舶1の推進力に変換することができる。この場合には、現実の船舶1での使用に耐えうる推進力が直接得られるようになる。
【0054】
なお、上記実施形態では、前記ハイドロリックモータ40をスクリュープロペラ70に連結したが、このスクリュープロペラ70とともに、あるいはスクリュープロペラ70に代えて前記ハイドロリックモータ40を連結した発電機を備えることとしてもよい。その場合には、前記導電性流体30の流動エネルギーをハイドロリックモータ40で回転駆動エネルギーに変換し、この回転駆動エネルギーを前記発電機でさらに電気エネルギーに変換することができる。
【0055】
この電気エネルギーを例えばスクリュープロペラ70に連結した電動機でさらに船舶1の推進力に変換し、或いは超電導磁石12,12や電極対13,13やその他設備への給電等に使用することで、現実の船舶1での使用に耐えうる推進力が得られるようになるとともに、船舶1の全体としてのエネルギー効率を向上させることができる。
【0056】
また、上記実施形態では、船舶1に4基シリーズに接続された超電導磁石装置10,10,10,10を搭載した例を説明したが、これらの超電導磁石装置10,10,10,10をパラレルに接続してもよい。その場合には、漏れ磁界を減少させるような配置が可能となるといったメリットがあるものの、前記シリーズに接続した場合に比べて推進効率は若干低下することは否めない。さらには、超電導磁石装置10の基数も4基には限定されないし、超電導磁石装置10に電磁シールドを設けてもよい。
【0057】
また、上記実施形態では、磁束密度Bの大きさは、現状の技術における一定の制限があるものとしているが、将来さらに大きな磁束密度Bが得られるようになれば、本発明の適用はより有効なものとなる。この場合には、さらに大きな磁束密度Bと、さらに高い導電率σとの相乗効果により、さらに大きな推進力が得られることになることはいうまでもない。
【0058】
この場合には、たとえ海水の如く低い導電率σの流体であっても、かかる大きな磁束密度Bがあれば、本発明の超電導磁石装置10に使用することができるようになる。その場合、電流密度Jの大きさによっては、海水の電気分解により水素ガスや塩素ガスが発生し、これらのガスによりハイドロリックモータ40のインペラに有害なキャビテーションが発生することがあるが、例えば重力タンク50でかかる水素を連続的にループ外に取り出すようにすることで、かかる問題は解消することができるものと考えられる。
【0059】
また、上記実施形態では、超電導磁石装置10を船舶1に搭載した例について説明したが、本発明の適用範囲はこれに限定されず、例えば水中航走体や陸上走行体への適用はもちろん、さらには陸上又は舶上の発電装置等への応用も可能である。
【図面の簡単な説明】
【0060】
【図1】本発明の一実施形態に係る超電導磁石装置を搭載した船舶の推進動力系を示す概念図である。
【図2】超電導磁石装置の詳細構成を示す斜視図である。
【図3】超電導磁石装置の電気制御系統を示す機能ブロック図である。
【符号の説明】
【0061】
1 船舶
10 超電導磁石装置
11 ダクト
12 超電導磁石
13 電極
14 クライオスタット
15 スイッチ
16 直流電源
17 永久電流スイッチ
18 直流電源
20 配管
30 導電性流体
40 ハイドロリックモータ
50 重力タンク
60 プロペラシャフト
70 スクリュープロペラ(推進器に相当する。)
100 エンジンルーム
110 ディーゼル発電機
120 サイクロコンバータ
130 配電盤
【特許請求の範囲】
【請求項1】
所定形状のダクトと、このダクト外に設けられ前記ダクトを横切る磁界を発生させる超電導磁石と、前記ダクト内に設けられ前記磁界と直交する方向の電界を発生させる電極対とを備え、それぞれ発生させた磁界と電界との相互作用により発生する力を利用して、前記ダクト内に充填された導電性流体を流動させるように構成された超電導磁石装置であって、
前記ダクトを閉ループで形成するとともに、
前記導電性流体の流動により回転駆動されるハイドロリックモータを備えたことを特徴とする超電導磁石装置。
【請求項2】
前記ダクトと、前記超電導磁石と、前記電極対と、前記ハイドロリックモータとを搭載した船舶又は水中航走体に推進力を付与する推進器を備え、
この推進器を前記ハイドロリックモータに連結したことを特徴とする請求項1記載の超電導磁石装置。
【請求項3】
前記ハイドロリックモータに連結した発電機を備えたことを特徴とする請求項1又は2記載の超電導磁石装置。
【請求項4】
前記導電性流体として、海水よりも導電率の高い流体を使用することを特徴とする請求項1〜3のいずれか1項に記載の超電導磁石装置。
【請求項1】
所定形状のダクトと、このダクト外に設けられ前記ダクトを横切る磁界を発生させる超電導磁石と、前記ダクト内に設けられ前記磁界と直交する方向の電界を発生させる電極対とを備え、それぞれ発生させた磁界と電界との相互作用により発生する力を利用して、前記ダクト内に充填された導電性流体を流動させるように構成された超電導磁石装置であって、
前記ダクトを閉ループで形成するとともに、
前記導電性流体の流動により回転駆動されるハイドロリックモータを備えたことを特徴とする超電導磁石装置。
【請求項2】
前記ダクトと、前記超電導磁石と、前記電極対と、前記ハイドロリックモータとを搭載した船舶又は水中航走体に推進力を付与する推進器を備え、
この推進器を前記ハイドロリックモータに連結したことを特徴とする請求項1記載の超電導磁石装置。
【請求項3】
前記ハイドロリックモータに連結した発電機を備えたことを特徴とする請求項1又は2記載の超電導磁石装置。
【請求項4】
前記導電性流体として、海水よりも導電率の高い流体を使用することを特徴とする請求項1〜3のいずれか1項に記載の超電導磁石装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2008−110627(P2008−110627A)
【公開日】平成20年5月15日(2008.5.15)
【国際特許分類】
【出願番号】特願2006−293394(P2006−293394)
【出願日】平成18年10月29日(2006.10.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.サイクロ
【出願人】(306011148)
【公開日】平成20年5月15日(2008.5.15)
【国際特許分類】
【出願日】平成18年10月29日(2006.10.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.サイクロ
【出願人】(306011148)
[ Back to top ]