
超音波プローブ及び超音波診断装置
【課題】穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することができる超音波プローブ及び超音波診断装置を提供すること。
【解決手段】実施の形態の超音波プローブにおいては、第1の超音波探触子群は、超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動されることで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列される。そして、第2の超音波探触子群は、第1の超音波探触子群によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列される。
【解決手段】実施の形態の超音波プローブにおいては、第1の超音波探触子群は、超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動されることで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列される。そして、第2の超音波探触子群は、第1の超音波探触子群によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施の形態は、超音波プローブ及び超音波診断装置に関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに設けられた振動素子から発生する超音波パルスを被検体内に放射し、被検体組織の音響インピーダンスの差異によって生ずる超音波反射波を前記振動素子により受信して生体情報を収集するものである。また、超音波診断装置は、超音波プローブを接触させるだけの簡単な操作で超音波画像データのリアルタイム表示が可能となるため、各種臓器の形態診断や機能診断などに広く用いられている。
【0003】
例えば、超音波診断装置は、生体組織検査やラジオ波焼灼治療(RFA:Radio Frequency Ablation)などの穿刺が行なわれる場合に多く用いられる。生体組織検査のために組織採取を行う場合には、医師は、ターゲットとなる病変をリアルタイムで超音波画像により確認しながら、穿刺針を体内に刺し、組織採取を行う。また、RFAを行う場合には、医師は、ターゲットとなる病変をリアルタイムで超音波画像により確認しながら、RFA針を病変部位まで刺し、その後、RFA針からラジオ波を照射する。
【0004】
例えば、このような超音波診断装置を用いた手技では、穿刺針やRFA針の位置を正確に把握するために、アタッチメントにより穿刺針の進入範囲を限定したり、2Dアレイプローブ(two dimensional array probe)や、メカニカル4Dプローブ(mechanical four dimensional probe)を用いて収集した3次元データを用いて穿刺針及びターゲット部位の位置を特定したりする。また、近年、穿刺針やRFA針の位置をより正確に把握するために、従来のメカニカル4Dプローブの超音波探触子群に、2次元的な超音波画像を生成するための超音波探触子群を新たに加えたメカニカル4Dプローブも知られている。しかしながら、上述した従来技術においては、穿刺時において、高精度で広範囲の超音波画像を得ようとした場合に、超音波プローブが大型化してしまい、操作性が低下する場合があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−56851号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することができる超音波プローブ及び超音波診断装置を提供することである。
【課題を解決するための手段】
【0007】
実施の形態の超音波プローブは、第1の超音波探触子群と、第2の超音波探触子群とを備える。第1の超音波探触子群は、超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動されることで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列される。第2の超音波探触子群は、前記第1の超音波探触子群によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列される。
【図面の簡単な説明】
【0008】
【図1A】図1Aは、第1の従来技術に係る超音波プローブの構成の一例を示す断面図である。
【図1B】図1Bは、図1Aに示す超音波プローブの断面図である。
【図1C】図1Cは、図1Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図2】図2は、第2の従来技術に係る超音波プローブにおける超音波探触子群の一例を示す図である。
【図3A】図3Aは、第1の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図3B】図3Bは、図3Aに示す超音波プローブの断面図である。
【図3C】図3Cは、第1の実施形態に係る超音波探触子の配列方向を示す図である。
【図3D】図3Dは、図3Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図4A】図4Aは、第2の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図4B】図4Bは、図4Aに示す超音波プローブの断面図である。
【図4C】図4Cは、図4Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図5A】図5Aは、第3の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図5B】図5Bは、図5Aに示す超音波プローブの断面図である。
【図5C】図5Cは、図5Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図6A】図6Aは、第4の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図6B】図6Bは、図6Aに示す超音波プローブの断面図である。
【図6C】図6Cは、図6Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図7A】図7Aは、第5の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図7B】図7Bは、図7Aに示す超音波プローブの断面図である。
【図7C】図7Cは、図7Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図8A】図8Aは、第6の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図8B】図8Bは、図8Aに示す超音波プローブの第1の断面図である。
【図8C】図8Cは、図8Aに示す超音波プローブの第2の断面図である。
【図8D】図8Dは、図8Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図9】図9は、本実施例に係る超音波診断装置の全体構成の一例を示す図である。
【発明を実施するための形態】
【0009】
(第1の実施形態)
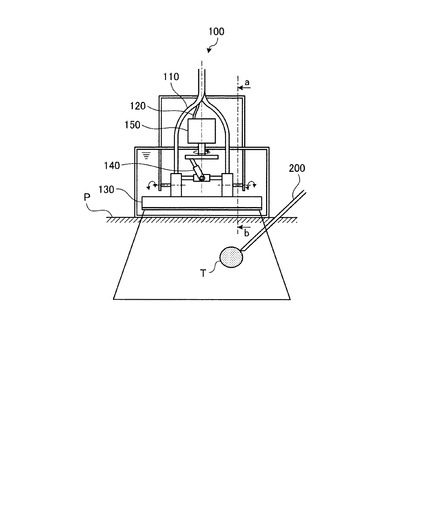
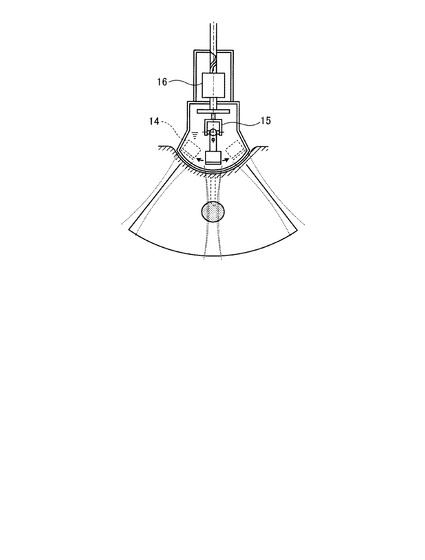
まず、従来技術に係る超音波プローブについて、図1A〜図2を用いて説明する。図1Aは、第1の従来技術に係る超音波プローブ100の構成の一例を示す断面図である。図1Aにおいては、1次元的に配列された超音波探触子群を機械的に揺動することで、3次元的に超音波を送受信するメカニカル4Dプローブを示す。図1Aに示すように、第1の従来技術に係る超音波プローブ100は、配線110と、配線120と、超音波探触子群130と、揺動機構140と、駆動機150とを備え、図1Aに示すように、被検体P内のターゲット部位Tに対する穿刺術に用いられる。
【0010】
配線110は、超音波探触子群130に含まれる超音波探触子を構成する圧電体と超音波診断装置本体との間で信号の伝送を行う。配線120は、駆動機150を超音波診断装置本体で制御するための制御信号と電力の伝送を行う。超音波探触子群130は、被検体Pとの間で超音波信号を送受信する。揺動機構140は、超音波探触子群130を機械的に揺動する。駆動機150は、揺動機構140を駆動する。
【0011】
ここで、超音波探触子群130は、1次元的なアレイ状に配列された超音波探触子から構成される。すなわち、超音波探触子群130は、図1Aの横方向に1次元的に配列された超音波探触子から構成される。そして、超音波プローブ100は、配線120を介して伝送された信号に基づいて、超音波探触子の配列方向に超音波探触子を電子的に走査することで、図1Aに示すように、2次元的な超音波画像の情報をリアルタイムに取得する。
【0012】
また、超音波プローブ100は、超音波探触子群130を超音波探触子の配列方向に揺動することで、3次元的な超音波画像の情報をリアルタイムに取得する。図1Bは、図1Aに示す超音波プローブの断面図である。図1Bは、図1Aに示すa−b間の断面図である。例えば、超音波プローブ100は、超音波探触子群130を電子的に走査しながら、図1Bの矢印に示すように、超音波探触子群130を超音波探触子の配列方向と直交する方向に曲線状に揺動することで、3次元的な超音波画像の情報をリアルタイムに取得する。
【0013】
超音波プローブ100は、生体の組織の採取や生体の患部の治療のために、被検体内に穿刺針等を刺入する穿刺術に用いられる。かかる穿刺術においては、安全性を高めるために、穿刺術者は、生体内に穿刺針等を刺入する範囲を含んだ生体の超音波画像を参照しながら生体内に穿刺針等を刺入する。すなわち、穿刺術者は、生体内の穿刺針等の位置を超音波画像を参照してリアルタイムに確認する。
【0014】
図1Cは、図1Aの超音波プローブを用いて生成される超音波画像を示す図である。 図1Cにおいては、超音波探触子群130を揺動させながら取得された情報をもとに生成された3次元の超音波画像を示す。図1Cに示すように、3次元の超音波画像においては、ターゲット部位T及び穿刺針ガイドが描出され、穿刺術者は、この画像により穿刺針の位置を確認しながら、穿刺術を行う。
【0015】
ここで、穿刺針の位置をより正確に把握するために、超音波プローブ100を用いてより高精細な3次元の超音波画像を得るためには、1次元的なアレイ状に配列された超音波探触子130の配列方向の走査線の密度を高くする手法、又は機械的な揺動の速度を遅くすることで揺動方向の走査線の密度を高くする手法が有効である。しかしながら、走査線の密度を高くする手法は、3次元の超音波画像の時間応答性が低下する。すなわち、フレームレートが低下し、穿刺針の動作速度が速い場合に、その動作に追従した超音波画像を生成することが困難となる。
【0016】
また、3次元の超音波画像の精度を確保しつつ、広範囲の情報を得るためには、超音波探触子群130の超音波探触子の配列方向の長さを拡大することで走査範囲を拡大する手法、又は機械的な揺動の速度を一定としたまま揺動の範囲を拡大する手法が有効である。しかしながら、範囲を拡大する手法は、上記した走査線の密度を高くする手法と同様に、フレームレートが低下し、穿刺針の動作速度が速い場合に、その動作に追従した超音波画像を生成することが困難となる。
【0017】
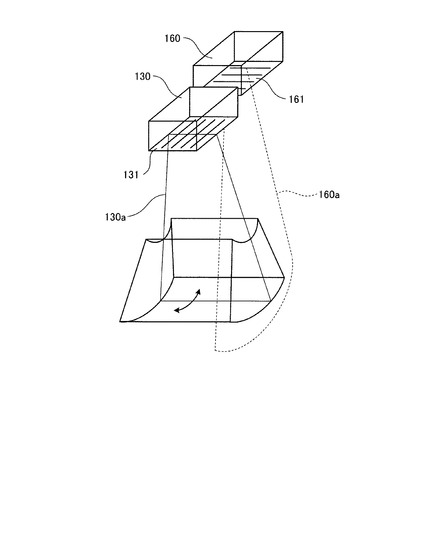
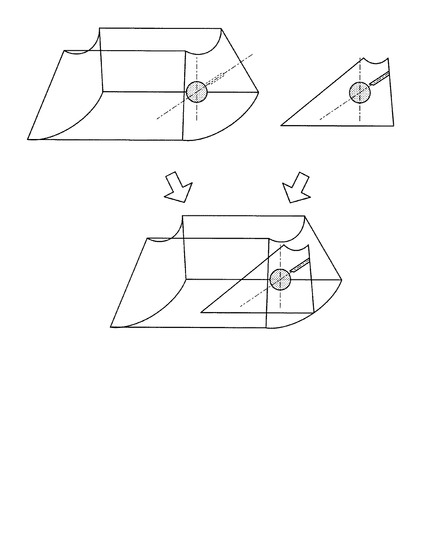
そこで、フレームレートの低下によって穿刺針の動作への追従性が低下することなく、高精細な3次元の超音波画像を生成するために、メカニカル4Dプローブの超音波探触子群に、2次元的な超音波画像を生成するための超音波探触子群を新たに加えたメカニカル4Dプローブが知られている。図2は、第2の従来技術に係る超音波プローブにおける超音波探触子群の一例を示す図である。
【0018】
第2の従来技術に係る超音波プローブでは、図2に示すように、3次元的に超音波を送受信する超音波探触子群130に加えて、超音波探触子群130の超音波探触子131の配列方向と直交する方向に超音波探触子161が配列され、2次元的に走査する超音波探触子群160を備える。すなわち、図2に示す超音波プローブは、超音波探触子群130の走査面130aと、超音波探触子群160の走査面160aとが直交するように配置される。
【0019】
そして、超音波探触子群160によって送受信される超音波に基づいて、穿刺針が描出された超音波画像が生成される。このとき、超音波探触子群160の走査面160aに穿刺針が刺入されるように、穿刺針を誘導する穿刺針装着器具等が用いられる。このように、第2の従来技術は、2次元的に走査する超音波探触子群によって穿刺針の動作を追従することで、仮に走査線の密度を高くした場合であっても、動作速度が速い穿刺針の動作に追従した超音波画像を生成することができる。
【0020】
しかしながら、第2の従来技術に係る超音波プローブにおいては、3次元の超音波画像を広範囲に生成しようとした場合に、利用方法が制限されることとなり、操作性が低下する。すなわち、第2の従来技術に係る超音波プローブにおいては、3次元の超音波画像の情報を得るための超音波探触子の配列方向と直交する方向に2次元の超音波画像の情報を得るための超音波探触子を配置した場合には、3次元の超音波画像の情報を得るための超音波探触子の配列方向と直交する方向の超音波プローブの音響放射面の外形寸法が大型化するため、操作性が低下する。
【0021】
例えば、第2の従来技術に係る超音波プローブは、超音波プローブが大型化するため、超音波プローブを体腔内等の狭い領域に挿入することが困難となる。また、第2の従来技術に係る超音波プローブは、例えば、超音波プローブがT字型になってしまい、超音波プローブの音響放射面の生体への接触性が低下することとなり、操作性が低下する。
【0022】
そこで、第1の実施形態に係る超音波プローブは、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することを可能にする。以下、第1の実施形態に係る超音波プローブについて、図3A〜3Dを用いて説明する。
【0023】
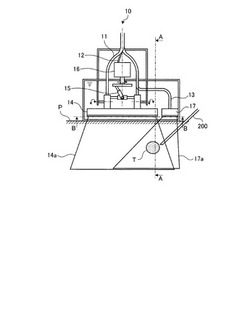
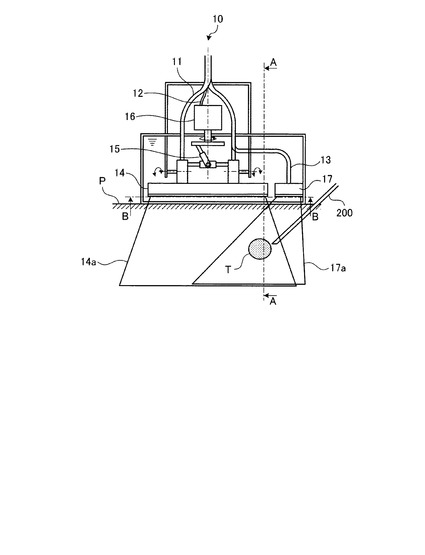
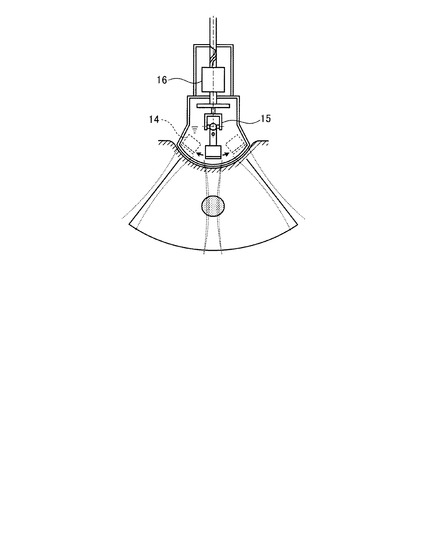
図3Aは、第1の実施形態に係る超音波プローブ10の構成の一例を示す断面図である。図3Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。図3Aに示すように、第1の実施形態に係る超音波プローブ10は、配線11と、配線12と、配線13と、第1の超音波探触子群14と、揺動機構15と、駆動機16と、第2の超音波探触子群17とを備える。
【0024】
配線11は、第1の超音波探触子群14に含まれる超音波探触子を構成する圧電体と超音波診断装置本体との間で信号の伝送を行う。配線12は、駆動機16を超音波診断装置本体で制御するための制御信号と電力の伝送を行う。配線13は、第2の超音波探触子群17に含まれる超音波探触子を構成する圧電体と超音波診断装置本体との間で信号の伝送を行う。
【0025】
第1の超音波探触子群14は、超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動することで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列される。具体的には、第1の超音波探触子群14は、配線11を介して伝送された信号を超音波に変換し、変換した超音波を被検体に対して送波する。また、第1の超音波探触子群14は、反射波を受波し、受波した超音波を電気信号に変換する。第1の超音波探触子群14は、上述した超音波の送受信を実行しながら、超音波探触子の配列方向と直交する方向に揺動する。
【0026】
図3Bは、図3Aに示す超音波プローブの断面図である。図3Bは、図3Aに示すA−A間の断面図である。例えば、第1の超音波探触子群14は、図3Bの矢印に示すように、超音波探触子の配列方向と直交する方向に曲線状に揺動する。ここで、第1の超音波探触子群14は、コンベックス型であってもよいし、或いはリニア型であってもよい。
【0027】
揺動機構15は、第1の超音波探触子群14を機械的に揺動する。具体的には、揺動機構15は、後述する駆動機16による駆動力を、第1の超音波探触子群14を超音波探触子の配列方向と直交する方向に揺動させる駆動力に変換して伝えることで、第1の超音波探触子群14を揺動する。駆動機16は、揺動機構15を駆動する。例えば、駆動機16は、モーター等である。
【0028】
第2の超音波探触子群17は、第1の超音波探触子群14によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列される。具体的には、第2の超音波探触子群17は、第2の超音波探触子群17における超音波探触子の配列方向が、第1の超音波探触子群14における超音波探触子の配列方向と略平行となるように配置される。すなわち、第2の超音波探触子群17の走査面17aは、図3Aに示すように、第1の超音波探触子群14の走査面14aと平行となる。
【0029】
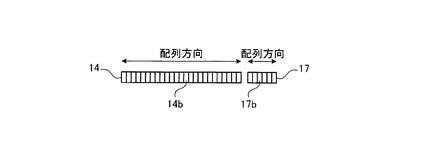
図3Cは、第1の実施形態に係る超音波探触子の配列方向を示す図である。図3Cにおいては、図3AのB−B間の断面に含まれる超音波探触子群を示す。例えば、第2の超音波探触子群17における超音波探触子17bの配列方向が、図3Cに示すように、第1の超音波探触子群14における超音波探触子14bの配列方向と同一になるように第2の超音波探触子群17が配置される。
【0030】
そして、第2の超音波探触子群17は、配線13を介して伝送された信号を超音波に変換し、変換した超音波を被検体に対して送波する。また、第2の超音波探触子群17は、反射波を受波し、受波した超音波を電気信号に変換する。なお、第2の超音波探触子群17は、コンベックス型であってもよいし、或いはリニア型であってもよい。
【0031】
ここで、第1の実施形態に係る超音波プローブ10においては、第1の超音波探触子群14における超音波探触子14b間の距離と、第2の超音波探触子群17における超音波探触子17b間の距離とが略同一である。また、第1の実施形態に係る超音波プローブ10においては、第1の超音波探触子群14の配列方向と直交する方向の幅と、第2の超音波探触子群17の配列方向と直交する方向の幅とが略同一である。
【0032】
なお、穿刺針200を所定の位置に誘導するための穿刺針装着器具を、第2の超音波探触子群17による2次元的な超音波信号の送受信範囲に穿刺針200を誘導可能となるように超音波プローブ10の所定の位置に装着して、穿刺針の刺入を行ってもよい。或いは、第2の超音波探触子群17による2次元的な超音波信号の送受信範囲に穿刺針200を誘導するための溝や穴等を超音波プローブ10に形成して、穿刺針200の刺入を行ってもよい。
【0033】
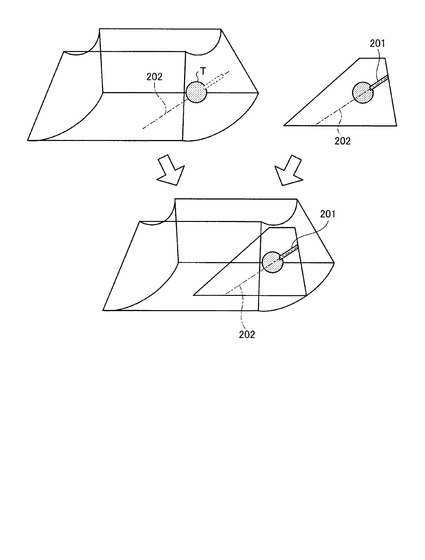
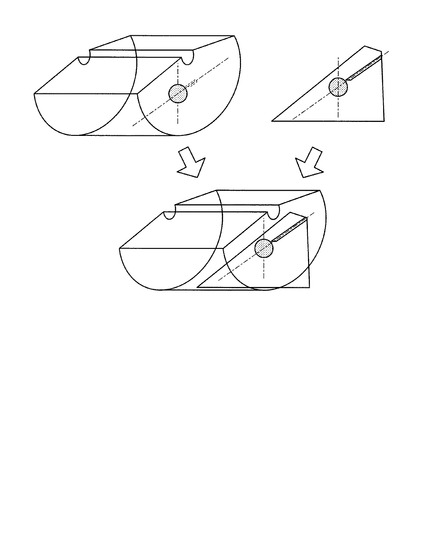
また、第1の超音波探触子群14と第2の超音波探触子群17の両方または一方を構成する超音波探触子を曲線状かつ1次元的なアレイ状に配列してもよい。図3Dは、図3Aの超音波プローブ10を用いて生成される超音波画像を示す図である。図3Dに示すように、超音波プローブ10を用いることで、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像とを生成することができる。
【0034】
すなわち、図3Dに示すように、ターゲット部位T及びその周辺領域を3次元的に表現した3次元画像と、穿刺針画像201が含まれる2次元画像とを生成することができる。ここで、図3Dに示すように、3次元の画像及び2次元の画像それぞれに、穿刺針200を誘導するための穿刺針マーカ202を表示させることが可能である。さらに、3次元画像と2次元画像とを合成させることも可能である。なお、図3Dに示す穿刺針マーカ202は、あくまでも一例であり、例えば、穿刺針を誘導する範囲を示す2本の線状の形態、又は穿刺針を誘導する範囲を示す筒状の形態、又はその他の穿刺針を誘導する範囲を示す形態でもよい。
【0035】
上述したように、第1の実施形態によれば、第1の超音波探触子群14は、複数の超音波探触子が1次元的に配列され、配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動することで、被検体を3次元的に走査する。そして、第2の超音波探触子群17は、複数の超音波探触子が1次元的に配列され、第1の超音波探触子群14によって走査される複数の走査面のうち、いずれかの走査面を走査する。従って、第1の実施形態に係る超音波プローブ10は、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することを可能にする。
【0036】
例えば、第1の実施形態に係る超音波プローブ10は、2次元的に超音波を送受信する第2の超音波探触子群17が、第1の超音波探触子群14によって走査される走査面のうちのいずれかを走査することから、高精度で広範囲の3次元の超音波画像を得る場合でも、超音波探触子の配列方向と直交する方向の超音波プローブの音響放射面の外形寸法が大型化することがない。従って、超音波プローブを体腔内等の狭い領域に容易に挿入することができる。また、超音波プローブがT字型になることもなく、超音波プローブの音響放射面の生体への接触性が低下することがない。
【0037】
また、第1の実施形態によれば、第2の超音波探触子群17は、当該第2の超音波探触子群17における超音波探触子の配列方向が、第1の超音波探触子群14における超音波探触子の配列方向と略平行となるように配置される。従って、第1の実施形態に係る超音波プローブ10は、既存の超音波プローブの形態をほとんど変化させることなく、実現することを可能にある。
【0038】
また、第1の実施形態によれば、第1の超音波探触子群14における超音波探触子間の距離と、第2の超音波探触子群17における超音波探触子間の距離とが略同一である。従って、第1の実施形態に係る超音波プローブ10は、第1の超音波探触子群14及び第2の超音波探触子群17それぞれにおける超音波の送受信を同様に制御することを可能にする。
【0039】
また、第1の実施形態によれば、第1の超音波探触子群14の配列方向と直交する方向の幅と、第2の超音波探触子群17の配列方向と直交する方向の幅とが略同一である。従って、第1の実施形態に係る超音波プローブ10は、超音波探触子の配列方向と直交する方向の超音波プローブの音響放射面の外形寸法を合わせることを可能にする。
【0040】
また、第1の実施形態よれば、第2の超音波探触子群14の走査面に穿刺針を誘導するための穿刺針装着機構、或いは、穿刺針案内器具を装着する装着機構を備える。従って、第1の実施形態に係る超音波プローブ10は、穿刺針を確実に2次元画像に描出させることを可能にする。
【0041】
(第2の実施形態)
上述した第1の実施形態では、第2の超音波探触子群17が固定されている場合について説明した。第2の実施形態では、第2の超音波探触子群17が揺動する場合について説明する。
【0042】
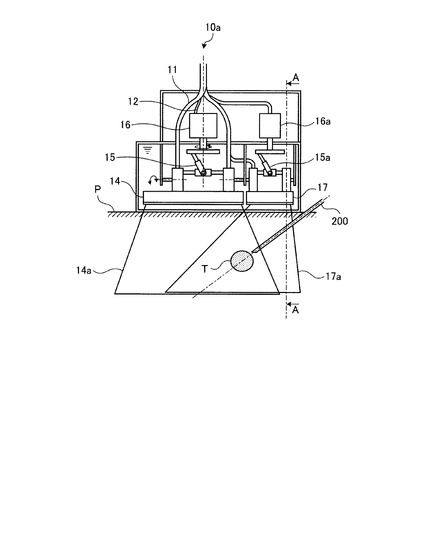
図4Aは、第2の実施形態に係る超音波プローブ10aの構成の一例を示す断面図である。図4Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第2の実施形態に係る超音波プローブ10aは、第1の実施形態に係る超音波プローブ10と比較して、揺動機構15a及び駆動機16aを新たに有する点と、第2の超音波探触子群17が有する機能が異なる。以下、これらを中心に説明する。
【0043】
揺動機構15aは、第2の超音波探触子群17を機械的に揺動する。具体的には、揺動機構15aは、後述する駆動機16aによる駆動力を、第2の超音波探触子群17を超音波探触子の配列方向と直交する方向に揺動させる駆動力に変換して伝えることで、第2の超音波探触子群17を揺動する。駆動機16aは、揺動機構15aを駆動する。例えば、駆動機16aは、モーター等である。
【0044】
第2の超音波探触子群17は、当該第2の超音波探触子群における超音波探触子の配列方向と直交する方向に揺動し、任意の位置で固定される。図4Bは、図4Aに示す超音波プローブのA−A間の断面図である。例えば、第2の実施形態に係る第2の超音波探触子群17は、図4Bに示すように、超音波探触子の配列方向と直交する方向に揺動し、任意の位置で固定される。一例を挙げると、第2の超音波探触子群17は、穿刺針200が刺入された位置に応じて揺動し、穿刺針200が走査面の範囲内にくる位置で固定される。
【0045】
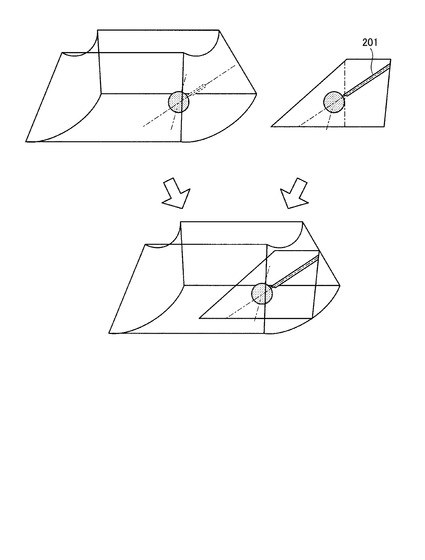
図4Cは、図4Aの超音波プローブを用いて生成される超音波画像を示す図である。例えば、超音波診断装置は、超音波プローブ10aを用いることで、図4Cに示すように、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく、穿刺針201を含む2次元の画像とを生成し、さらに、合成することができる。
【0046】
ここで、第2の実施形態に係る超音波プローブ10aにおいては、第2の超音波探触子群17の走査面17aに穿刺針200が刺入されなかった場合でも、第2の超音波探触子群17を揺動させて、穿刺針200を2次元画像内に確実に描出させることが可能である。なお、第2の超音波探触子群17の固定位置を可変した場合には、3次元画像、2次元画像及び3次元画像と2次元画像とを合成した画像に表示している穿刺針を誘導するための穿刺マーカの表示位置は、第2の超音波探触子群17の固定位置の変化に対応して変化される。
【0047】
上述したように、第2の実施形態によれば、第2の超音波探触子群17は、当該第2の超音波探触子群における超音波探触子の配列方向と直交する方向に揺動し、任意の位置で固定される。従って、第2の実施形態に係る超音波プローブ10aは、穿刺針200の刺入位置に柔軟に対応することを可能にする。
【0048】
(第3の実施形態)
上述した第1及び第2の実施形態では、第2の超音波探触子群17が、第1の超音波探触子群14の超音波探触子の配列方向に配置されていた場合について説明した。第3の実施形態では、第2の超音波探触子群17が第1の超音波探触子群14の音響放射面に対向する面側に配置される場合について説明する。
【0049】
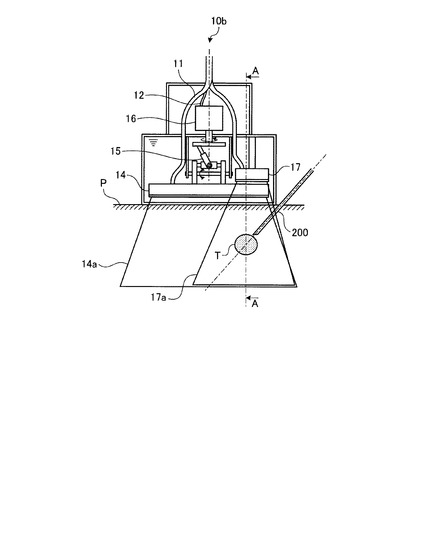
図5Aは、第3の実施形態に係る超音波プローブ10bの構成の一例を示す断面図である。図5Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第3の実施形態に係る超音波プローブ10bは、第1の実施形態に係る超音波プローブ10と比較して、第2の超音波探触子群17の配置が異なる。以下、これらを中心に説明する。
【0050】
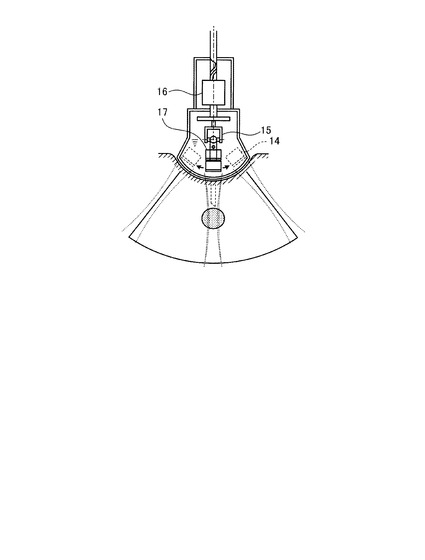
第2の超音波探触子群17は、第1の超音波探触子群14において音響放射面に対向する面側に配置され、当該第2の超音波探触子群17による超音波の送受信は、第1の超音波探触子群14が前記超音波の走査面近傍に位置しないことを条件に、実行される。図5Bは、図5Aに示す超音波プローブ10bのA−A間の断面図である。例えば、第3の実施形態に係る第2の超音波探触子群17は、図5Bに示すように、第1の超音波探触子群14の上側に配置される。そして、第1の超音波探触子群14が、第2の超音波探触子群17の音響放射面の前方付近に揺動してきた場合には、第2の超音波探触子群17は、超音波の送受信を停止する。
【0051】
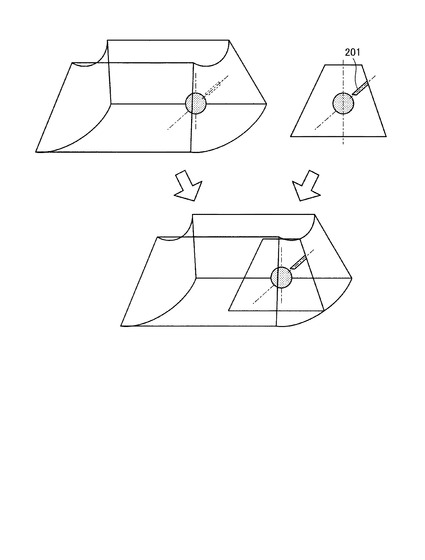
図5Cは、図5Aの超音波プローブを用いて生成される超音波画像を示す図である。図5Cに示すように、超音波プローブ10bを用いることで、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像との重なり具合が大きい合成画像を生成することができる。
【0052】
上述したように、第3の実施形態によれば、第2の超音波探触子群17は、第1の超音波探触子群14において音響放射面に対向する面側に配置され、当該第2の超音波探触子群17による超音波の送受信は、前記第1の超音波探触子群14が前記超音波の走査面近傍に位置しないことを条件に、実行される。従って、第3の実施形態に係る超音波プローブ10bは、超音波プローブを小型化させることができるとともに、3次元画像と2次元画像との重畳度合いが大きい画像を合成することが可能である。
【0053】
(第4の実施形態)
上述した第2の実施形態では、第1の超音波探触子群14の揺動と、第2の超音波探触子群17の揺動とを、それぞれ別々に制御する場合について説明した。第4の実施形態では、第1の超音波探触子群14の揺動と、第2の超音波探触子群17の揺動とを、同期して制御する場合について説明する。
【0054】
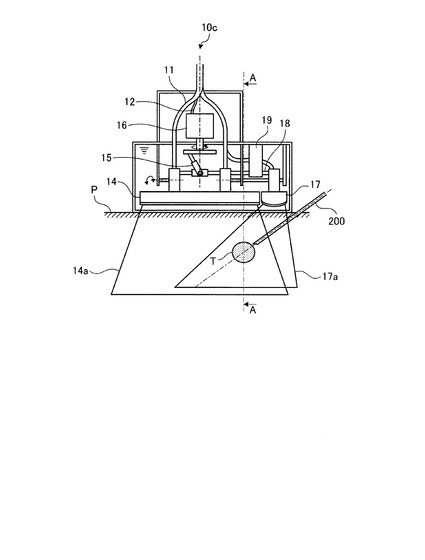
図6Aは、第4の実施形態に係る超音波プローブ10cの構成の一例を示す断面図である。図6Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第4の実施形態に係る超音波プローブ10cは、第1の実施形態に係る超音波プローブ10と比較して、駆動力伝達軸18と、駆動力伝達クラッチ19とを新たに備える点が異なる。以下、これらを中心に説明する。
【0055】
駆動力伝達軸18は、揺動機構15と第2の超音波探触子群17とを接続し、揺動機構15を介して伝達される駆動機16の駆動力を第2の超音波探触子群17に伝達して揺動させる。駆動力伝達クラッチ19は、図6Aに示すように、駆動力伝達軸18の第2の超音波探触子群17への駆動力の伝達を制御する。具体的には、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを接続することで、第2の超音波探触子群17に駆動力を伝達させる。また、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを解放することで、第2の超音波探触子群17への駆動力の伝達を抑止する。
【0056】
図6Bは、図6Aに示す超音波プローブ10bのA−A間の断面図である。例えば、駆動力伝達クラッチが解放され、駆動機16による駆動力の第2の超音波探触子群17への伝達がない状態では、第2の超音波探触子群17は所定の位置に固定されている。一方、駆動力伝達クラッチが接続され、駆動機16による駆動力の第2の超音波探触子群17への駆動力の伝達がある状態では、第1の超音波探触子群14と第2の超音波探触子群17とは同期して機械的に揺動する。
【0057】
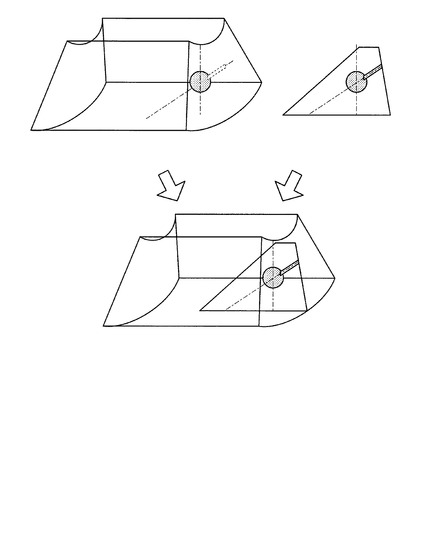
図6Cは、図6Aの超音波プローブを用いて生成される超音波画像を示す図である。図6Cに示すように、超音波プローブ10cを用いることで、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像との合成画像を生成することができる。
【0058】
上述したように、第4の実施形態によれば、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを接続することで、第2の超音波探触子群17に駆動力を伝達させる。また、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを解放することで、第2の超音波探触子群17への駆動力の伝達を抑止する。従って、第4の実施形態に係る超音波プローブ10cは、第2の超音波探触子群17の揺動を、第1の超音波探触子14と同様に制御することができ、仮に穿刺術の途中で穿刺針の刺入の方向が変化した場合などにも柔軟に対応することを可能にする。
【0059】
(第5の実施形態)
上述した第1〜4の実施形態では、体表にて用いられる超音波プローブを用いる場合について説明した。第5の実施形態では、体腔内などの狭い領域に挿入される超音波プローブに適用する場合について説明する。
【0060】
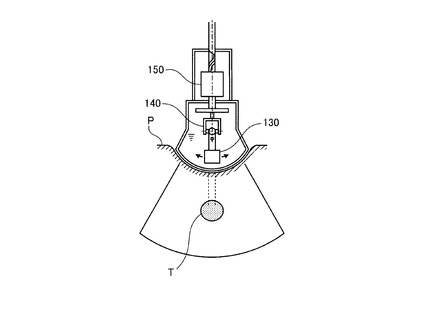
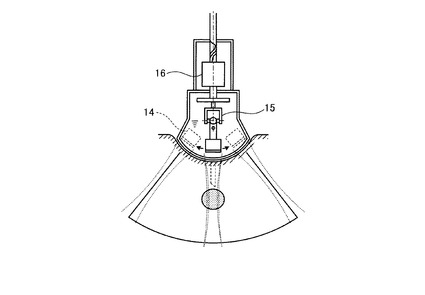
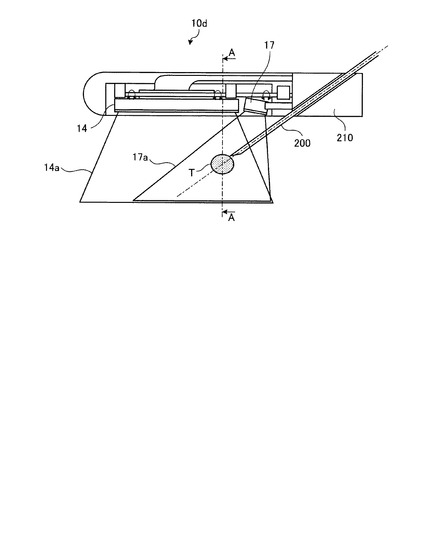
図7Aは、第5の実施形態に係る超音波プローブ10dの構成の一例を示す断面図である。図7Aにおいては、被検体内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第5の実施形態に係る超音波プローブ10dは、第1〜4の実施形態に係る超音波プローブ10〜10cと比較して、超音波プローブの形態及び第2の超音波探触子群17の配置方法が異なる。以下、これらを中心に説明する。
【0061】
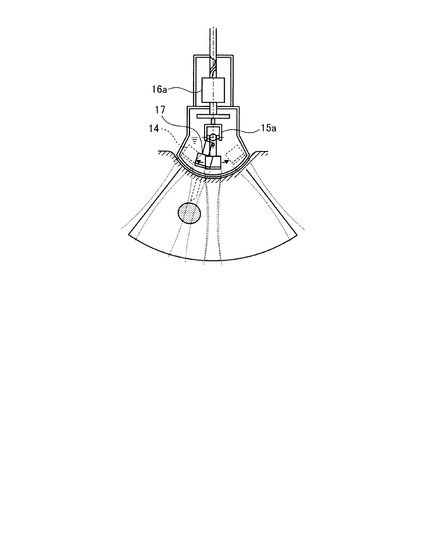
第5の実施形態に係る超音波プローブ10dは、図7Aに示すように、先端がドーム状であり、この先端から体腔内などの狭い領域に挿入される。そして、体腔内に挿入された後、穿刺針誘導溝210を介して刺入された穿刺針200を第2の超音波探触子群17によって送受信される超音波に基づいて描出する。
【0062】
ここで、第5の実施形態に係る第2の超音波探触子群17は、図7Aに示すように、第1の超音波探触子群14の中心の方向に傾いて配置される。すなわち、第1の超音波探触子群14の走査面との重畳される面積を大きくするように、第2の超音波探触子群17は、所定の角度傾けて配置される。なお、第2の超音波探触子群17を傾ける角度が、任意に決定することができるが、第2の超音波探触子群17によって送受信される超音波が第1の超音波探触子群14に当たらない程度に傾けられる。
【0063】
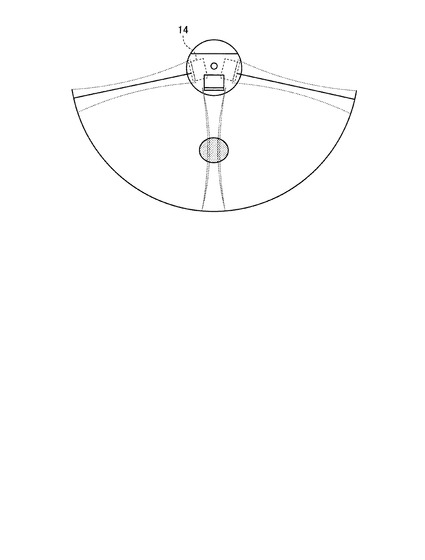
図7Bは、図7Aに示す超音波プローブ10bのA−A間の断面図である。体腔内などの狭い領域に挿入される超音波プローブ10dにおいては、第1の超音波探触子14の揺動角度は大きく、図7Bに示すように、約180°の領域を走査することが可能である。
【0064】
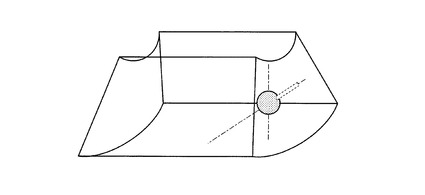
図7Cは、図7Aの超音波プローブを用いて生成される超音波画像を示す図である。図7Cに示すように、超音波プローブ10dを用いることで、体腔内などの狭い領域に挿入される超音波プローブにも適用することができ、第1の超音波探触子群14によってより広範囲に送受信された超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像との合成画像を生成することができる。なお、図7Aに示す例はあくまでも一例であり、穿刺針誘導溝を複数備える場合であってもよい。また、穿刺針誘導溝の配置を可変可能な構造としてもよい。
【0065】
上述したように、第5の実施形態によれば、第2の超音波探触子群17は、第1の超音波探触子群14の中心の方向に傾いて配置される。従って、第5の実施形態に係る超音波プローブ10dは、3次元画像と2次元画像との重畳度合いが大きい画像を合成することを可能にする。
【0066】
(第6の実施形態)
上述した第1〜5の実施形態では、第2の超音波探触子群17を一つのみ備える場合について説明した。第6の実施形態では、一つの超音波プローブに複数の第2の超音波探触子群17を備える場合について説明する。
【0067】
図8Aは、第5の実施形態に係る超音波プローブ10eの構成の一例を示す断面図である。図8Aにおいては、被検体内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第6の実施形態に係る超音波プローブ10eは、第1〜5の実施形態に係る超音波プローブ10〜10dと比較して、第2の超音波探触子群17の数が異なる。以下、これらを中心に説明する。
【0068】
図8Bは、図8Aに示す超音波プローブ10eの第1の断面図である。図8Bにおいては、図8AのA−A間の断面図を示す。図8Cは、図8Aに示す超音波プローブの第2の断面図である。図8Cにおいては、図8AのB−B間の断面図を示す。
【0069】
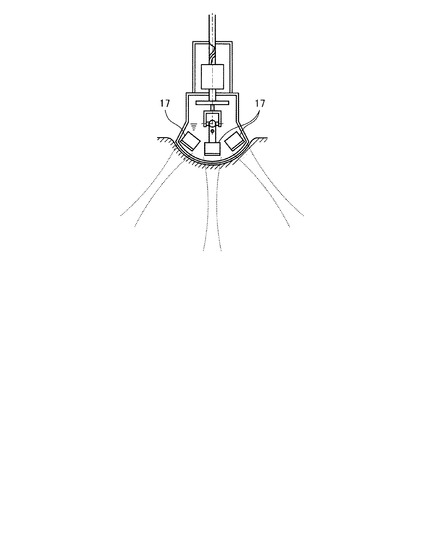
第6の実施形態に係る超音波プローブ10eは、図8Bに示すように、第1の超音波探触子群14が揺動する。そして、第6の実施形態に係る超音波プローブ10eは、例えば、図8Cに示すように、第2の超音波探触子群17を3つ備える。
【0070】
図8Dは、図8Aの超音波プローブを用いて生成される超音波画像を示す図である。超音波プローブ10eを用いることで、第1の超音波探触子群14によって送受信された超音波に基づいて生成された3次元画像に対して、第2の超音波探触子群17それぞれから生成された2次元画像を合成することができる。また、第2の超音波探触子群17それぞれから生成された2次元画像を同時に表示することも可能である。
【0071】
上述したように、第6の実施形態によれば、第2の超音波探触子群17を複数備える。従って、第6の実施形態に係る超音波プローブ10eは、種々の組み合わせの画像を表示することができ、穿刺術の精度を向上させることが可能である。
【0072】
(第7の実施形態)
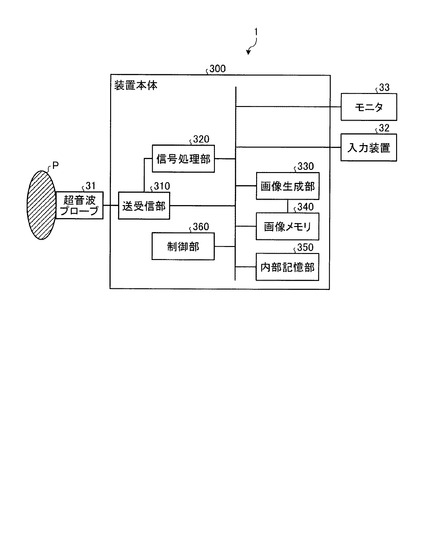
次に、第7の実施形態に係る超音波プローブを備えた超音波診断装置について説明する。図9は、第7の実施形態に係る超音波診断装置1の全体構成の一例を示す図である。図9に示すように、第7の実施形態に係る超音波診断装置1は、超音波プローブ31と、入力装置32と、モニタ33と、装置本体300とを有する。
【0073】
超音波プローブ31は、上述した第1〜第6の実施形態に係る超音波プローブである。そして、超音波プローブ31は、複数の圧電振動子を有し、これら複数の圧電振動子は、後述する装置本体300が有する送受信部310から供給される駆動信号に基づき超音波を発生し、さらに、被検体Pからの反射波を受信して電気信号に変換する。また、超音波プローブ31は、圧電振動子に設けられる整合層と、圧電振動子から後方への超音波の伝播を防止するバッキング材などを有する。
【0074】
超音波プローブ31から被検体Pに超音波が送信されると、送信された超音波は、被検体Pの体内組織における音響インピーダンスの不連続面で次々と反射され、反射波信号として超音波プローブ31が有する複数の圧電振動子にて受信される。受信される反射波信号の振幅は、超音波が反射される不連続面における音響インピーダンスの差に依存する。なお、送信された超音波パルスが移動している血流や心臓壁などの表面で反射された場合の反射波信号は、ドプラ効果により、移動体の超音波送信方向に対する速度成分に依存して、周波数偏移を受ける。
【0075】
入力装置32は、超音波診断装置1の操作者からの各種設定要求を受け付け、装置本体300に対して受け付けた各種設定要求を転送する。入力装置32は、例えば、トラックボール、スイッチ、ボタン、タッチコマンドスクリーン、キーボード、マウスなどである。
【0076】
モニタ33は、超音波診断装置1の操作者が入力装置32を用いて各種設定要求を入力するためのGUI(Graphical User Interface)を表示したり、装置本体300において生成された超音波画像などを表示したりする。
【0077】
装置本体300は、超音波プローブ31が受信した反射波に基づいて超音波画像を生成する装置であり、図9に示すように、送受信部310と、信号処理部320と、画像生成部330と、画像メモリ340と、内部記憶部350と、制御部360とを有する。
【0078】
送受信部310は、トリガ発生回路、遅延回路およびパルサ回路などを有し、超音波プローブ31に駆動信号を供給する。パルサ回路は、所定のレート周波数で、送信超音波を形成するためのレートパルスを繰り返し発生する。また、遅延回路は、超音波プローブ31から発生される超音波をビーム状に集束して送信指向性を決定するために必要な圧電振動子ごとの遅延時間を、パルサ回路が発生する各レートパルスに対し与える。また、トリガ発生回路は、レートパルスに基づくタイミングで、超音波プローブ31に駆動信号(駆動パルス)を印加する。すなわち、遅延回路は、各レートパルスに対し与える遅延時間を変化させることで、圧電振動子面からの送信方向を任意に調整する。
【0079】
また、送受信部310は、アンプ回路、A/D変換器、加算器などを有し、超音波プローブ31が受信した反射波信号に対して各種処理を行なって反射波データを生成する。アンプ回路は、反射波信号をチャンネルごとに増幅してゲイン補正処理を行ない、A/D変換器は、ゲイン補正された反射波信号をA/D変換して受信指向性を決定するのに必要な遅延時間を与え、加算器は、A/D変換器によって処理された反射波信号の加算処理を行なって反射波データを生成する。加算器の加算処理により、反射波信号の受信指向性に応じた方向からの反射成分が強調される。また、送受信部310は、駆動機制御回路などを有し、超音波プローブ31に内蔵する超音波探触子群を機械的に揺動するための駆動機への動力供給や、駆動機の動作状況の監視を行う。
【0080】
このように、送受信部310は、超音波の送受信における送信指向性と受信指向性とを制御するとともに、超音波探触子群を機械的に揺動するための駆動機を制御する。なお、送受信部310は、後述する制御部360の制御により、遅延情報、送信周波数、送信駆動電圧、開口素子数などを瞬時に変更可能な機能を有している。特に、送信駆動電圧の変更においては、瞬時に値を切り替えることが可能であるリニアアンプ型の発振回路、又は、複数の電源ユニットを電気的に切り替える機構によって実現される。また、送受信部310は、1フレームもしくはレートごとに、異なる波形を送信して受信することも可能である。
【0081】
信号処理部320は、送受信部310からゲイン補正処理、A/D変換処理および加算処理が行なわれた処理済み反射波信号である反射波データを受信し、対数増幅、包絡線検波処理などを行なって、信号強度が輝度の明るさで表現されるデータ(Bモードデータ)を生成する。
【0082】
ここで、信号処理部320は、検波周波数を変化させることで、映像化する周波数帯域を変えることができる。また、信号処理部320は、1つの受信データに対して、2つの検波周波数による検波処理を並列して行うことができる。
【0083】
また、信号処理部320は、送受信部310から受信した反射波データから速度情報を周波数解析し、ドプラ効果による血流や組織、造影剤エコー成分を抽出し、平均速度、分散、パワーなどの移動体情報を多点について抽出したデータ(ドプラデータ)を生成する。
【0084】
画像生成部330は、信号処理部320が生成したBモードデータや、ドプラデータから、時系列に連続した超音波画像を生成する。そして、画像生成部330は、生成した超音波画像を画像メモリ340に格納する。
【0085】
また、画像生成部330は、生成した超音波画像を表示用画像に順次変換して、画像メモリ340に格納する。具体的には、画像生成部330は、超音波画像を画像メモリ340から読み出し、テレビなどに代表されるビデオフォーマットの走査線信号列に変換(スキャンコンバート)することで、表示用画像(Bモード画像やドプラ画像)を生成し、生成した表示用画像を画像メモリ340に再度格納する。なお、画像生成部330は、画像データの収集に関する制御も実行する。
【0086】
そして、画像生成部330は、第1の超音波探触子群14によって送受信された超音波に基づく第1の超音波画像と、第2の超音波探触子群17によって送受信された超音波に基づく第2の超音波画像とをそれぞれ生成する。さらに、画像生成部330は、第1の超音波画像と第2の超音波画像とをそれぞれ異なる色調で生成する。
【0087】
画像メモリ340は、信号処理部320によって生成されたRawデータ(Bモードデータ及びドプラデータ)、画像生成部330によって生成された超音波画像及び表示用画像を記憶する。また、画像メモリ340は、画像生成部330による処理結果を記憶する。さらに、画像メモリ340は、送受信部310を経た直後の出力信号(RF:Radio Frequency)や画像の輝度信号、種々の生データなどを必要に応じて記憶する。
【0088】
内部記憶部350は、超音波送受信、画像処理および表示処理を行なうための制御プログラムや、診断情報(例えば、患者ID、医師の所見など)や、診断プロトコルなどの各種データを記憶する。また、内部記憶部350は、必要に応じて、画像メモリ340が記憶する画像の保管などにも使用される。
【0089】
制御部360は、超音波診断装置1における処理全体を制御する。具体的には、制御部360は、送受信部310、信号処理部320及び画像生成部330の各種処理を制御する。例えば、制御部360は、入力装置32を介して操作者から入力された各種設定要求や、内部記憶部350から読込んだ各種制御プログラムおよび各種設定情報などに基づき、各種処理を制御したり、画像メモリ340が記憶する表示用画像をモニタ33にて表示するように制御したりする。
【0090】
例えば、制御部360は、画像生成部330によって生成された第1の超音波画像と第2の超音波画像とをモニタ33にて同時に表示させる。また、制御部360は、第1の超音波画像及び前記第2の超音波画像のうち、少なくとも一方とともに、穿刺針を誘導するための穿刺マーカを表示するように制御する。ここで、制御部360は、第2の超音波探触子群17の固定位置が可変にされた場合には、3次元画像、2次元画像及び3次元画像と2次元画像とを合成した画像に表示している穿刺針を誘導するための穿刺マーカの表示位置を、第2の超音波探触子群17の固定位置の変化に対応して変化させる。
【0091】
上述したように、第7の実施形態によれば、画像生成部330は、第1の超音波探触子群14によって送受信された超音波に基づく第1の超音波画像と、第2の超音波探触子群17によって送受信された超音波に基づく第2の超音波画像とをそれぞれ生成する。そして、制御部360は、画像生成部330によって生成された第1の超音波画像と第2の超音波画像とを表示部にて同時に表示させる。従って、第7の実施形態に係る超音波診断装置1は、穿刺術に実行しやすい画像を穿刺術者に提供することを可能にする。
【0092】
また、第7の実施形態によれば、画像生成部330は、第1の超音波画像と第2の超音波画像とをそれぞれ異なる色調で生成する。従って、第7の実施形態に係る超音波診断装置1は、それぞれの画像を認識しやすい画像を提表示することを可能にする。
【0093】
また、第7の実施形態によれば、制御部360は、第1の超音波画像及び第2の超音波画像のうち、少なくとも一方とともに、穿刺針を誘導するための穿刺マーカを表示するように制御する。従って、第7の実施形態に係る超音波診断装置1は、穿刺術の安全性をさらに向上させることを可能にする。
【0094】
以上説明したとおり、第1〜第7の実施形態によれば、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することができる超音波プローブ及び超音波診断装置を提供することを可能にする。
【0095】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0096】
1 超音波診断装置
10 超音波プローブ
14 第1の超音波探触子群
17 第2の超音波探触子群
【技術分野】
【0001】
本発明の実施の形態は、超音波プローブ及び超音波診断装置に関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに設けられた振動素子から発生する超音波パルスを被検体内に放射し、被検体組織の音響インピーダンスの差異によって生ずる超音波反射波を前記振動素子により受信して生体情報を収集するものである。また、超音波診断装置は、超音波プローブを接触させるだけの簡単な操作で超音波画像データのリアルタイム表示が可能となるため、各種臓器の形態診断や機能診断などに広く用いられている。
【0003】
例えば、超音波診断装置は、生体組織検査やラジオ波焼灼治療(RFA:Radio Frequency Ablation)などの穿刺が行なわれる場合に多く用いられる。生体組織検査のために組織採取を行う場合には、医師は、ターゲットとなる病変をリアルタイムで超音波画像により確認しながら、穿刺針を体内に刺し、組織採取を行う。また、RFAを行う場合には、医師は、ターゲットとなる病変をリアルタイムで超音波画像により確認しながら、RFA針を病変部位まで刺し、その後、RFA針からラジオ波を照射する。
【0004】
例えば、このような超音波診断装置を用いた手技では、穿刺針やRFA針の位置を正確に把握するために、アタッチメントにより穿刺針の進入範囲を限定したり、2Dアレイプローブ(two dimensional array probe)や、メカニカル4Dプローブ(mechanical four dimensional probe)を用いて収集した3次元データを用いて穿刺針及びターゲット部位の位置を特定したりする。また、近年、穿刺針やRFA針の位置をより正確に把握するために、従来のメカニカル4Dプローブの超音波探触子群に、2次元的な超音波画像を生成するための超音波探触子群を新たに加えたメカニカル4Dプローブも知られている。しかしながら、上述した従来技術においては、穿刺時において、高精度で広範囲の超音波画像を得ようとした場合に、超音波プローブが大型化してしまい、操作性が低下する場合があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−56851号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することができる超音波プローブ及び超音波診断装置を提供することである。
【課題を解決するための手段】
【0007】
実施の形態の超音波プローブは、第1の超音波探触子群と、第2の超音波探触子群とを備える。第1の超音波探触子群は、超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動されることで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列される。第2の超音波探触子群は、前記第1の超音波探触子群によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列される。
【図面の簡単な説明】
【0008】
【図1A】図1Aは、第1の従来技術に係る超音波プローブの構成の一例を示す断面図である。
【図1B】図1Bは、図1Aに示す超音波プローブの断面図である。
【図1C】図1Cは、図1Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図2】図2は、第2の従来技術に係る超音波プローブにおける超音波探触子群の一例を示す図である。
【図3A】図3Aは、第1の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図3B】図3Bは、図3Aに示す超音波プローブの断面図である。
【図3C】図3Cは、第1の実施形態に係る超音波探触子の配列方向を示す図である。
【図3D】図3Dは、図3Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図4A】図4Aは、第2の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図4B】図4Bは、図4Aに示す超音波プローブの断面図である。
【図4C】図4Cは、図4Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図5A】図5Aは、第3の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図5B】図5Bは、図5Aに示す超音波プローブの断面図である。
【図5C】図5Cは、図5Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図6A】図6Aは、第4の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図6B】図6Bは、図6Aに示す超音波プローブの断面図である。
【図6C】図6Cは、図6Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図7A】図7Aは、第5の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図7B】図7Bは、図7Aに示す超音波プローブの断面図である。
【図7C】図7Cは、図7Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図8A】図8Aは、第6の実施形態に係る超音波プローブの構成の一例を示す断面図である。
【図8B】図8Bは、図8Aに示す超音波プローブの第1の断面図である。
【図8C】図8Cは、図8Aに示す超音波プローブの第2の断面図である。
【図8D】図8Dは、図8Aの超音波プローブを用いて生成される超音波画像を示す図である。
【図9】図9は、本実施例に係る超音波診断装置の全体構成の一例を示す図である。
【発明を実施するための形態】
【0009】
(第1の実施形態)
まず、従来技術に係る超音波プローブについて、図1A〜図2を用いて説明する。図1Aは、第1の従来技術に係る超音波プローブ100の構成の一例を示す断面図である。図1Aにおいては、1次元的に配列された超音波探触子群を機械的に揺動することで、3次元的に超音波を送受信するメカニカル4Dプローブを示す。図1Aに示すように、第1の従来技術に係る超音波プローブ100は、配線110と、配線120と、超音波探触子群130と、揺動機構140と、駆動機150とを備え、図1Aに示すように、被検体P内のターゲット部位Tに対する穿刺術に用いられる。
【0010】
配線110は、超音波探触子群130に含まれる超音波探触子を構成する圧電体と超音波診断装置本体との間で信号の伝送を行う。配線120は、駆動機150を超音波診断装置本体で制御するための制御信号と電力の伝送を行う。超音波探触子群130は、被検体Pとの間で超音波信号を送受信する。揺動機構140は、超音波探触子群130を機械的に揺動する。駆動機150は、揺動機構140を駆動する。
【0011】
ここで、超音波探触子群130は、1次元的なアレイ状に配列された超音波探触子から構成される。すなわち、超音波探触子群130は、図1Aの横方向に1次元的に配列された超音波探触子から構成される。そして、超音波プローブ100は、配線120を介して伝送された信号に基づいて、超音波探触子の配列方向に超音波探触子を電子的に走査することで、図1Aに示すように、2次元的な超音波画像の情報をリアルタイムに取得する。
【0012】
また、超音波プローブ100は、超音波探触子群130を超音波探触子の配列方向に揺動することで、3次元的な超音波画像の情報をリアルタイムに取得する。図1Bは、図1Aに示す超音波プローブの断面図である。図1Bは、図1Aに示すa−b間の断面図である。例えば、超音波プローブ100は、超音波探触子群130を電子的に走査しながら、図1Bの矢印に示すように、超音波探触子群130を超音波探触子の配列方向と直交する方向に曲線状に揺動することで、3次元的な超音波画像の情報をリアルタイムに取得する。
【0013】
超音波プローブ100は、生体の組織の採取や生体の患部の治療のために、被検体内に穿刺針等を刺入する穿刺術に用いられる。かかる穿刺術においては、安全性を高めるために、穿刺術者は、生体内に穿刺針等を刺入する範囲を含んだ生体の超音波画像を参照しながら生体内に穿刺針等を刺入する。すなわち、穿刺術者は、生体内の穿刺針等の位置を超音波画像を参照してリアルタイムに確認する。
【0014】
図1Cは、図1Aの超音波プローブを用いて生成される超音波画像を示す図である。 図1Cにおいては、超音波探触子群130を揺動させながら取得された情報をもとに生成された3次元の超音波画像を示す。図1Cに示すように、3次元の超音波画像においては、ターゲット部位T及び穿刺針ガイドが描出され、穿刺術者は、この画像により穿刺針の位置を確認しながら、穿刺術を行う。
【0015】
ここで、穿刺針の位置をより正確に把握するために、超音波プローブ100を用いてより高精細な3次元の超音波画像を得るためには、1次元的なアレイ状に配列された超音波探触子130の配列方向の走査線の密度を高くする手法、又は機械的な揺動の速度を遅くすることで揺動方向の走査線の密度を高くする手法が有効である。しかしながら、走査線の密度を高くする手法は、3次元の超音波画像の時間応答性が低下する。すなわち、フレームレートが低下し、穿刺針の動作速度が速い場合に、その動作に追従した超音波画像を生成することが困難となる。
【0016】
また、3次元の超音波画像の精度を確保しつつ、広範囲の情報を得るためには、超音波探触子群130の超音波探触子の配列方向の長さを拡大することで走査範囲を拡大する手法、又は機械的な揺動の速度を一定としたまま揺動の範囲を拡大する手法が有効である。しかしながら、範囲を拡大する手法は、上記した走査線の密度を高くする手法と同様に、フレームレートが低下し、穿刺針の動作速度が速い場合に、その動作に追従した超音波画像を生成することが困難となる。
【0017】
そこで、フレームレートの低下によって穿刺針の動作への追従性が低下することなく、高精細な3次元の超音波画像を生成するために、メカニカル4Dプローブの超音波探触子群に、2次元的な超音波画像を生成するための超音波探触子群を新たに加えたメカニカル4Dプローブが知られている。図2は、第2の従来技術に係る超音波プローブにおける超音波探触子群の一例を示す図である。
【0018】
第2の従来技術に係る超音波プローブでは、図2に示すように、3次元的に超音波を送受信する超音波探触子群130に加えて、超音波探触子群130の超音波探触子131の配列方向と直交する方向に超音波探触子161が配列され、2次元的に走査する超音波探触子群160を備える。すなわち、図2に示す超音波プローブは、超音波探触子群130の走査面130aと、超音波探触子群160の走査面160aとが直交するように配置される。
【0019】
そして、超音波探触子群160によって送受信される超音波に基づいて、穿刺針が描出された超音波画像が生成される。このとき、超音波探触子群160の走査面160aに穿刺針が刺入されるように、穿刺針を誘導する穿刺針装着器具等が用いられる。このように、第2の従来技術は、2次元的に走査する超音波探触子群によって穿刺針の動作を追従することで、仮に走査線の密度を高くした場合であっても、動作速度が速い穿刺針の動作に追従した超音波画像を生成することができる。
【0020】
しかしながら、第2の従来技術に係る超音波プローブにおいては、3次元の超音波画像を広範囲に生成しようとした場合に、利用方法が制限されることとなり、操作性が低下する。すなわち、第2の従来技術に係る超音波プローブにおいては、3次元の超音波画像の情報を得るための超音波探触子の配列方向と直交する方向に2次元の超音波画像の情報を得るための超音波探触子を配置した場合には、3次元の超音波画像の情報を得るための超音波探触子の配列方向と直交する方向の超音波プローブの音響放射面の外形寸法が大型化するため、操作性が低下する。
【0021】
例えば、第2の従来技術に係る超音波プローブは、超音波プローブが大型化するため、超音波プローブを体腔内等の狭い領域に挿入することが困難となる。また、第2の従来技術に係る超音波プローブは、例えば、超音波プローブがT字型になってしまい、超音波プローブの音響放射面の生体への接触性が低下することとなり、操作性が低下する。
【0022】
そこで、第1の実施形態に係る超音波プローブは、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することを可能にする。以下、第1の実施形態に係る超音波プローブについて、図3A〜3Dを用いて説明する。
【0023】
図3Aは、第1の実施形態に係る超音波プローブ10の構成の一例を示す断面図である。図3Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。図3Aに示すように、第1の実施形態に係る超音波プローブ10は、配線11と、配線12と、配線13と、第1の超音波探触子群14と、揺動機構15と、駆動機16と、第2の超音波探触子群17とを備える。
【0024】
配線11は、第1の超音波探触子群14に含まれる超音波探触子を構成する圧電体と超音波診断装置本体との間で信号の伝送を行う。配線12は、駆動機16を超音波診断装置本体で制御するための制御信号と電力の伝送を行う。配線13は、第2の超音波探触子群17に含まれる超音波探触子を構成する圧電体と超音波診断装置本体との間で信号の伝送を行う。
【0025】
第1の超音波探触子群14は、超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動することで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列される。具体的には、第1の超音波探触子群14は、配線11を介して伝送された信号を超音波に変換し、変換した超音波を被検体に対して送波する。また、第1の超音波探触子群14は、反射波を受波し、受波した超音波を電気信号に変換する。第1の超音波探触子群14は、上述した超音波の送受信を実行しながら、超音波探触子の配列方向と直交する方向に揺動する。
【0026】
図3Bは、図3Aに示す超音波プローブの断面図である。図3Bは、図3Aに示すA−A間の断面図である。例えば、第1の超音波探触子群14は、図3Bの矢印に示すように、超音波探触子の配列方向と直交する方向に曲線状に揺動する。ここで、第1の超音波探触子群14は、コンベックス型であってもよいし、或いはリニア型であってもよい。
【0027】
揺動機構15は、第1の超音波探触子群14を機械的に揺動する。具体的には、揺動機構15は、後述する駆動機16による駆動力を、第1の超音波探触子群14を超音波探触子の配列方向と直交する方向に揺動させる駆動力に変換して伝えることで、第1の超音波探触子群14を揺動する。駆動機16は、揺動機構15を駆動する。例えば、駆動機16は、モーター等である。
【0028】
第2の超音波探触子群17は、第1の超音波探触子群14によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列される。具体的には、第2の超音波探触子群17は、第2の超音波探触子群17における超音波探触子の配列方向が、第1の超音波探触子群14における超音波探触子の配列方向と略平行となるように配置される。すなわち、第2の超音波探触子群17の走査面17aは、図3Aに示すように、第1の超音波探触子群14の走査面14aと平行となる。
【0029】
図3Cは、第1の実施形態に係る超音波探触子の配列方向を示す図である。図3Cにおいては、図3AのB−B間の断面に含まれる超音波探触子群を示す。例えば、第2の超音波探触子群17における超音波探触子17bの配列方向が、図3Cに示すように、第1の超音波探触子群14における超音波探触子14bの配列方向と同一になるように第2の超音波探触子群17が配置される。
【0030】
そして、第2の超音波探触子群17は、配線13を介して伝送された信号を超音波に変換し、変換した超音波を被検体に対して送波する。また、第2の超音波探触子群17は、反射波を受波し、受波した超音波を電気信号に変換する。なお、第2の超音波探触子群17は、コンベックス型であってもよいし、或いはリニア型であってもよい。
【0031】
ここで、第1の実施形態に係る超音波プローブ10においては、第1の超音波探触子群14における超音波探触子14b間の距離と、第2の超音波探触子群17における超音波探触子17b間の距離とが略同一である。また、第1の実施形態に係る超音波プローブ10においては、第1の超音波探触子群14の配列方向と直交する方向の幅と、第2の超音波探触子群17の配列方向と直交する方向の幅とが略同一である。
【0032】
なお、穿刺針200を所定の位置に誘導するための穿刺針装着器具を、第2の超音波探触子群17による2次元的な超音波信号の送受信範囲に穿刺針200を誘導可能となるように超音波プローブ10の所定の位置に装着して、穿刺針の刺入を行ってもよい。或いは、第2の超音波探触子群17による2次元的な超音波信号の送受信範囲に穿刺針200を誘導するための溝や穴等を超音波プローブ10に形成して、穿刺針200の刺入を行ってもよい。
【0033】
また、第1の超音波探触子群14と第2の超音波探触子群17の両方または一方を構成する超音波探触子を曲線状かつ1次元的なアレイ状に配列してもよい。図3Dは、図3Aの超音波プローブ10を用いて生成される超音波画像を示す図である。図3Dに示すように、超音波プローブ10を用いることで、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像とを生成することができる。
【0034】
すなわち、図3Dに示すように、ターゲット部位T及びその周辺領域を3次元的に表現した3次元画像と、穿刺針画像201が含まれる2次元画像とを生成することができる。ここで、図3Dに示すように、3次元の画像及び2次元の画像それぞれに、穿刺針200を誘導するための穿刺針マーカ202を表示させることが可能である。さらに、3次元画像と2次元画像とを合成させることも可能である。なお、図3Dに示す穿刺針マーカ202は、あくまでも一例であり、例えば、穿刺針を誘導する範囲を示す2本の線状の形態、又は穿刺針を誘導する範囲を示す筒状の形態、又はその他の穿刺針を誘導する範囲を示す形態でもよい。
【0035】
上述したように、第1の実施形態によれば、第1の超音波探触子群14は、複数の超音波探触子が1次元的に配列され、配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動することで、被検体を3次元的に走査する。そして、第2の超音波探触子群17は、複数の超音波探触子が1次元的に配列され、第1の超音波探触子群14によって走査される複数の走査面のうち、いずれかの走査面を走査する。従って、第1の実施形態に係る超音波プローブ10は、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することを可能にする。
【0036】
例えば、第1の実施形態に係る超音波プローブ10は、2次元的に超音波を送受信する第2の超音波探触子群17が、第1の超音波探触子群14によって走査される走査面のうちのいずれかを走査することから、高精度で広範囲の3次元の超音波画像を得る場合でも、超音波探触子の配列方向と直交する方向の超音波プローブの音響放射面の外形寸法が大型化することがない。従って、超音波プローブを体腔内等の狭い領域に容易に挿入することができる。また、超音波プローブがT字型になることもなく、超音波プローブの音響放射面の生体への接触性が低下することがない。
【0037】
また、第1の実施形態によれば、第2の超音波探触子群17は、当該第2の超音波探触子群17における超音波探触子の配列方向が、第1の超音波探触子群14における超音波探触子の配列方向と略平行となるように配置される。従って、第1の実施形態に係る超音波プローブ10は、既存の超音波プローブの形態をほとんど変化させることなく、実現することを可能にある。
【0038】
また、第1の実施形態によれば、第1の超音波探触子群14における超音波探触子間の距離と、第2の超音波探触子群17における超音波探触子間の距離とが略同一である。従って、第1の実施形態に係る超音波プローブ10は、第1の超音波探触子群14及び第2の超音波探触子群17それぞれにおける超音波の送受信を同様に制御することを可能にする。
【0039】
また、第1の実施形態によれば、第1の超音波探触子群14の配列方向と直交する方向の幅と、第2の超音波探触子群17の配列方向と直交する方向の幅とが略同一である。従って、第1の実施形態に係る超音波プローブ10は、超音波探触子の配列方向と直交する方向の超音波プローブの音響放射面の外形寸法を合わせることを可能にする。
【0040】
また、第1の実施形態よれば、第2の超音波探触子群14の走査面に穿刺針を誘導するための穿刺針装着機構、或いは、穿刺針案内器具を装着する装着機構を備える。従って、第1の実施形態に係る超音波プローブ10は、穿刺針を確実に2次元画像に描出させることを可能にする。
【0041】
(第2の実施形態)
上述した第1の実施形態では、第2の超音波探触子群17が固定されている場合について説明した。第2の実施形態では、第2の超音波探触子群17が揺動する場合について説明する。
【0042】
図4Aは、第2の実施形態に係る超音波プローブ10aの構成の一例を示す断面図である。図4Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第2の実施形態に係る超音波プローブ10aは、第1の実施形態に係る超音波プローブ10と比較して、揺動機構15a及び駆動機16aを新たに有する点と、第2の超音波探触子群17が有する機能が異なる。以下、これらを中心に説明する。
【0043】
揺動機構15aは、第2の超音波探触子群17を機械的に揺動する。具体的には、揺動機構15aは、後述する駆動機16aによる駆動力を、第2の超音波探触子群17を超音波探触子の配列方向と直交する方向に揺動させる駆動力に変換して伝えることで、第2の超音波探触子群17を揺動する。駆動機16aは、揺動機構15aを駆動する。例えば、駆動機16aは、モーター等である。
【0044】
第2の超音波探触子群17は、当該第2の超音波探触子群における超音波探触子の配列方向と直交する方向に揺動し、任意の位置で固定される。図4Bは、図4Aに示す超音波プローブのA−A間の断面図である。例えば、第2の実施形態に係る第2の超音波探触子群17は、図4Bに示すように、超音波探触子の配列方向と直交する方向に揺動し、任意の位置で固定される。一例を挙げると、第2の超音波探触子群17は、穿刺針200が刺入された位置に応じて揺動し、穿刺針200が走査面の範囲内にくる位置で固定される。
【0045】
図4Cは、図4Aの超音波プローブを用いて生成される超音波画像を示す図である。例えば、超音波診断装置は、超音波プローブ10aを用いることで、図4Cに示すように、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく、穿刺針201を含む2次元の画像とを生成し、さらに、合成することができる。
【0046】
ここで、第2の実施形態に係る超音波プローブ10aにおいては、第2の超音波探触子群17の走査面17aに穿刺針200が刺入されなかった場合でも、第2の超音波探触子群17を揺動させて、穿刺針200を2次元画像内に確実に描出させることが可能である。なお、第2の超音波探触子群17の固定位置を可変した場合には、3次元画像、2次元画像及び3次元画像と2次元画像とを合成した画像に表示している穿刺針を誘導するための穿刺マーカの表示位置は、第2の超音波探触子群17の固定位置の変化に対応して変化される。
【0047】
上述したように、第2の実施形態によれば、第2の超音波探触子群17は、当該第2の超音波探触子群における超音波探触子の配列方向と直交する方向に揺動し、任意の位置で固定される。従って、第2の実施形態に係る超音波プローブ10aは、穿刺針200の刺入位置に柔軟に対応することを可能にする。
【0048】
(第3の実施形態)
上述した第1及び第2の実施形態では、第2の超音波探触子群17が、第1の超音波探触子群14の超音波探触子の配列方向に配置されていた場合について説明した。第3の実施形態では、第2の超音波探触子群17が第1の超音波探触子群14の音響放射面に対向する面側に配置される場合について説明する。
【0049】
図5Aは、第3の実施形態に係る超音波プローブ10bの構成の一例を示す断面図である。図5Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第3の実施形態に係る超音波プローブ10bは、第1の実施形態に係る超音波プローブ10と比較して、第2の超音波探触子群17の配置が異なる。以下、これらを中心に説明する。
【0050】
第2の超音波探触子群17は、第1の超音波探触子群14において音響放射面に対向する面側に配置され、当該第2の超音波探触子群17による超音波の送受信は、第1の超音波探触子群14が前記超音波の走査面近傍に位置しないことを条件に、実行される。図5Bは、図5Aに示す超音波プローブ10bのA−A間の断面図である。例えば、第3の実施形態に係る第2の超音波探触子群17は、図5Bに示すように、第1の超音波探触子群14の上側に配置される。そして、第1の超音波探触子群14が、第2の超音波探触子群17の音響放射面の前方付近に揺動してきた場合には、第2の超音波探触子群17は、超音波の送受信を停止する。
【0051】
図5Cは、図5Aの超音波プローブを用いて生成される超音波画像を示す図である。図5Cに示すように、超音波プローブ10bを用いることで、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像との重なり具合が大きい合成画像を生成することができる。
【0052】
上述したように、第3の実施形態によれば、第2の超音波探触子群17は、第1の超音波探触子群14において音響放射面に対向する面側に配置され、当該第2の超音波探触子群17による超音波の送受信は、前記第1の超音波探触子群14が前記超音波の走査面近傍に位置しないことを条件に、実行される。従って、第3の実施形態に係る超音波プローブ10bは、超音波プローブを小型化させることができるとともに、3次元画像と2次元画像との重畳度合いが大きい画像を合成することが可能である。
【0053】
(第4の実施形態)
上述した第2の実施形態では、第1の超音波探触子群14の揺動と、第2の超音波探触子群17の揺動とを、それぞれ別々に制御する場合について説明した。第4の実施形態では、第1の超音波探触子群14の揺動と、第2の超音波探触子群17の揺動とを、同期して制御する場合について説明する。
【0054】
図6Aは、第4の実施形態に係る超音波プローブ10cの構成の一例を示す断面図である。図6Aにおいては、被検体P内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第4の実施形態に係る超音波プローブ10cは、第1の実施形態に係る超音波プローブ10と比較して、駆動力伝達軸18と、駆動力伝達クラッチ19とを新たに備える点が異なる。以下、これらを中心に説明する。
【0055】
駆動力伝達軸18は、揺動機構15と第2の超音波探触子群17とを接続し、揺動機構15を介して伝達される駆動機16の駆動力を第2の超音波探触子群17に伝達して揺動させる。駆動力伝達クラッチ19は、図6Aに示すように、駆動力伝達軸18の第2の超音波探触子群17への駆動力の伝達を制御する。具体的には、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを接続することで、第2の超音波探触子群17に駆動力を伝達させる。また、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを解放することで、第2の超音波探触子群17への駆動力の伝達を抑止する。
【0056】
図6Bは、図6Aに示す超音波プローブ10bのA−A間の断面図である。例えば、駆動力伝達クラッチが解放され、駆動機16による駆動力の第2の超音波探触子群17への伝達がない状態では、第2の超音波探触子群17は所定の位置に固定されている。一方、駆動力伝達クラッチが接続され、駆動機16による駆動力の第2の超音波探触子群17への駆動力の伝達がある状態では、第1の超音波探触子群14と第2の超音波探触子群17とは同期して機械的に揺動する。
【0057】
図6Cは、図6Aの超音波プローブを用いて生成される超音波画像を示す図である。図6Cに示すように、超音波プローブ10cを用いることで、第1の超音波探触子群14によって送受信される超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像との合成画像を生成することができる。
【0058】
上述したように、第4の実施形態によれば、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを接続することで、第2の超音波探触子群17に駆動力を伝達させる。また、駆動力伝達クラッチ19は、駆動力伝達軸18と第2の超音波探触子群17とを解放することで、第2の超音波探触子群17への駆動力の伝達を抑止する。従って、第4の実施形態に係る超音波プローブ10cは、第2の超音波探触子群17の揺動を、第1の超音波探触子14と同様に制御することができ、仮に穿刺術の途中で穿刺針の刺入の方向が変化した場合などにも柔軟に対応することを可能にする。
【0059】
(第5の実施形態)
上述した第1〜4の実施形態では、体表にて用いられる超音波プローブを用いる場合について説明した。第5の実施形態では、体腔内などの狭い領域に挿入される超音波プローブに適用する場合について説明する。
【0060】
図7Aは、第5の実施形態に係る超音波プローブ10dの構成の一例を示す断面図である。図7Aにおいては、被検体内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第5の実施形態に係る超音波プローブ10dは、第1〜4の実施形態に係る超音波プローブ10〜10cと比較して、超音波プローブの形態及び第2の超音波探触子群17の配置方法が異なる。以下、これらを中心に説明する。
【0061】
第5の実施形態に係る超音波プローブ10dは、図7Aに示すように、先端がドーム状であり、この先端から体腔内などの狭い領域に挿入される。そして、体腔内に挿入された後、穿刺針誘導溝210を介して刺入された穿刺針200を第2の超音波探触子群17によって送受信される超音波に基づいて描出する。
【0062】
ここで、第5の実施形態に係る第2の超音波探触子群17は、図7Aに示すように、第1の超音波探触子群14の中心の方向に傾いて配置される。すなわち、第1の超音波探触子群14の走査面との重畳される面積を大きくするように、第2の超音波探触子群17は、所定の角度傾けて配置される。なお、第2の超音波探触子群17を傾ける角度が、任意に決定することができるが、第2の超音波探触子群17によって送受信される超音波が第1の超音波探触子群14に当たらない程度に傾けられる。
【0063】
図7Bは、図7Aに示す超音波プローブ10bのA−A間の断面図である。体腔内などの狭い領域に挿入される超音波プローブ10dにおいては、第1の超音波探触子14の揺動角度は大きく、図7Bに示すように、約180°の領域を走査することが可能である。
【0064】
図7Cは、図7Aの超音波プローブを用いて生成される超音波画像を示す図である。図7Cに示すように、超音波プローブ10dを用いることで、体腔内などの狭い領域に挿入される超音波プローブにも適用することができ、第1の超音波探触子群14によってより広範囲に送受信された超音波に基づく3次元の画像と、第2の超音波探触子群17によって送受信される超音波に基づく2次元の画像との合成画像を生成することができる。なお、図7Aに示す例はあくまでも一例であり、穿刺針誘導溝を複数備える場合であってもよい。また、穿刺針誘導溝の配置を可変可能な構造としてもよい。
【0065】
上述したように、第5の実施形態によれば、第2の超音波探触子群17は、第1の超音波探触子群14の中心の方向に傾いて配置される。従って、第5の実施形態に係る超音波プローブ10dは、3次元画像と2次元画像との重畳度合いが大きい画像を合成することを可能にする。
【0066】
(第6の実施形態)
上述した第1〜5の実施形態では、第2の超音波探触子群17を一つのみ備える場合について説明した。第6の実施形態では、一つの超音波プローブに複数の第2の超音波探触子群17を備える場合について説明する。
【0067】
図8Aは、第5の実施形態に係る超音波プローブ10eの構成の一例を示す断面図である。図8Aにおいては、被検体内のターゲット部位Tに対する穿刺術に用いられた状態を示す。ここで、第6の実施形態に係る超音波プローブ10eは、第1〜5の実施形態に係る超音波プローブ10〜10dと比較して、第2の超音波探触子群17の数が異なる。以下、これらを中心に説明する。
【0068】
図8Bは、図8Aに示す超音波プローブ10eの第1の断面図である。図8Bにおいては、図8AのA−A間の断面図を示す。図8Cは、図8Aに示す超音波プローブの第2の断面図である。図8Cにおいては、図8AのB−B間の断面図を示す。
【0069】
第6の実施形態に係る超音波プローブ10eは、図8Bに示すように、第1の超音波探触子群14が揺動する。そして、第6の実施形態に係る超音波プローブ10eは、例えば、図8Cに示すように、第2の超音波探触子群17を3つ備える。
【0070】
図8Dは、図8Aの超音波プローブを用いて生成される超音波画像を示す図である。超音波プローブ10eを用いることで、第1の超音波探触子群14によって送受信された超音波に基づいて生成された3次元画像に対して、第2の超音波探触子群17それぞれから生成された2次元画像を合成することができる。また、第2の超音波探触子群17それぞれから生成された2次元画像を同時に表示することも可能である。
【0071】
上述したように、第6の実施形態によれば、第2の超音波探触子群17を複数備える。従って、第6の実施形態に係る超音波プローブ10eは、種々の組み合わせの画像を表示することができ、穿刺術の精度を向上させることが可能である。
【0072】
(第7の実施形態)
次に、第7の実施形態に係る超音波プローブを備えた超音波診断装置について説明する。図9は、第7の実施形態に係る超音波診断装置1の全体構成の一例を示す図である。図9に示すように、第7の実施形態に係る超音波診断装置1は、超音波プローブ31と、入力装置32と、モニタ33と、装置本体300とを有する。
【0073】
超音波プローブ31は、上述した第1〜第6の実施形態に係る超音波プローブである。そして、超音波プローブ31は、複数の圧電振動子を有し、これら複数の圧電振動子は、後述する装置本体300が有する送受信部310から供給される駆動信号に基づき超音波を発生し、さらに、被検体Pからの反射波を受信して電気信号に変換する。また、超音波プローブ31は、圧電振動子に設けられる整合層と、圧電振動子から後方への超音波の伝播を防止するバッキング材などを有する。
【0074】
超音波プローブ31から被検体Pに超音波が送信されると、送信された超音波は、被検体Pの体内組織における音響インピーダンスの不連続面で次々と反射され、反射波信号として超音波プローブ31が有する複数の圧電振動子にて受信される。受信される反射波信号の振幅は、超音波が反射される不連続面における音響インピーダンスの差に依存する。なお、送信された超音波パルスが移動している血流や心臓壁などの表面で反射された場合の反射波信号は、ドプラ効果により、移動体の超音波送信方向に対する速度成分に依存して、周波数偏移を受ける。
【0075】
入力装置32は、超音波診断装置1の操作者からの各種設定要求を受け付け、装置本体300に対して受け付けた各種設定要求を転送する。入力装置32は、例えば、トラックボール、スイッチ、ボタン、タッチコマンドスクリーン、キーボード、マウスなどである。
【0076】
モニタ33は、超音波診断装置1の操作者が入力装置32を用いて各種設定要求を入力するためのGUI(Graphical User Interface)を表示したり、装置本体300において生成された超音波画像などを表示したりする。
【0077】
装置本体300は、超音波プローブ31が受信した反射波に基づいて超音波画像を生成する装置であり、図9に示すように、送受信部310と、信号処理部320と、画像生成部330と、画像メモリ340と、内部記憶部350と、制御部360とを有する。
【0078】
送受信部310は、トリガ発生回路、遅延回路およびパルサ回路などを有し、超音波プローブ31に駆動信号を供給する。パルサ回路は、所定のレート周波数で、送信超音波を形成するためのレートパルスを繰り返し発生する。また、遅延回路は、超音波プローブ31から発生される超音波をビーム状に集束して送信指向性を決定するために必要な圧電振動子ごとの遅延時間を、パルサ回路が発生する各レートパルスに対し与える。また、トリガ発生回路は、レートパルスに基づくタイミングで、超音波プローブ31に駆動信号(駆動パルス)を印加する。すなわち、遅延回路は、各レートパルスに対し与える遅延時間を変化させることで、圧電振動子面からの送信方向を任意に調整する。
【0079】
また、送受信部310は、アンプ回路、A/D変換器、加算器などを有し、超音波プローブ31が受信した反射波信号に対して各種処理を行なって反射波データを生成する。アンプ回路は、反射波信号をチャンネルごとに増幅してゲイン補正処理を行ない、A/D変換器は、ゲイン補正された反射波信号をA/D変換して受信指向性を決定するのに必要な遅延時間を与え、加算器は、A/D変換器によって処理された反射波信号の加算処理を行なって反射波データを生成する。加算器の加算処理により、反射波信号の受信指向性に応じた方向からの反射成分が強調される。また、送受信部310は、駆動機制御回路などを有し、超音波プローブ31に内蔵する超音波探触子群を機械的に揺動するための駆動機への動力供給や、駆動機の動作状況の監視を行う。
【0080】
このように、送受信部310は、超音波の送受信における送信指向性と受信指向性とを制御するとともに、超音波探触子群を機械的に揺動するための駆動機を制御する。なお、送受信部310は、後述する制御部360の制御により、遅延情報、送信周波数、送信駆動電圧、開口素子数などを瞬時に変更可能な機能を有している。特に、送信駆動電圧の変更においては、瞬時に値を切り替えることが可能であるリニアアンプ型の発振回路、又は、複数の電源ユニットを電気的に切り替える機構によって実現される。また、送受信部310は、1フレームもしくはレートごとに、異なる波形を送信して受信することも可能である。
【0081】
信号処理部320は、送受信部310からゲイン補正処理、A/D変換処理および加算処理が行なわれた処理済み反射波信号である反射波データを受信し、対数増幅、包絡線検波処理などを行なって、信号強度が輝度の明るさで表現されるデータ(Bモードデータ)を生成する。
【0082】
ここで、信号処理部320は、検波周波数を変化させることで、映像化する周波数帯域を変えることができる。また、信号処理部320は、1つの受信データに対して、2つの検波周波数による検波処理を並列して行うことができる。
【0083】
また、信号処理部320は、送受信部310から受信した反射波データから速度情報を周波数解析し、ドプラ効果による血流や組織、造影剤エコー成分を抽出し、平均速度、分散、パワーなどの移動体情報を多点について抽出したデータ(ドプラデータ)を生成する。
【0084】
画像生成部330は、信号処理部320が生成したBモードデータや、ドプラデータから、時系列に連続した超音波画像を生成する。そして、画像生成部330は、生成した超音波画像を画像メモリ340に格納する。
【0085】
また、画像生成部330は、生成した超音波画像を表示用画像に順次変換して、画像メモリ340に格納する。具体的には、画像生成部330は、超音波画像を画像メモリ340から読み出し、テレビなどに代表されるビデオフォーマットの走査線信号列に変換(スキャンコンバート)することで、表示用画像(Bモード画像やドプラ画像)を生成し、生成した表示用画像を画像メモリ340に再度格納する。なお、画像生成部330は、画像データの収集に関する制御も実行する。
【0086】
そして、画像生成部330は、第1の超音波探触子群14によって送受信された超音波に基づく第1の超音波画像と、第2の超音波探触子群17によって送受信された超音波に基づく第2の超音波画像とをそれぞれ生成する。さらに、画像生成部330は、第1の超音波画像と第2の超音波画像とをそれぞれ異なる色調で生成する。
【0087】
画像メモリ340は、信号処理部320によって生成されたRawデータ(Bモードデータ及びドプラデータ)、画像生成部330によって生成された超音波画像及び表示用画像を記憶する。また、画像メモリ340は、画像生成部330による処理結果を記憶する。さらに、画像メモリ340は、送受信部310を経た直後の出力信号(RF:Radio Frequency)や画像の輝度信号、種々の生データなどを必要に応じて記憶する。
【0088】
内部記憶部350は、超音波送受信、画像処理および表示処理を行なうための制御プログラムや、診断情報(例えば、患者ID、医師の所見など)や、診断プロトコルなどの各種データを記憶する。また、内部記憶部350は、必要に応じて、画像メモリ340が記憶する画像の保管などにも使用される。
【0089】
制御部360は、超音波診断装置1における処理全体を制御する。具体的には、制御部360は、送受信部310、信号処理部320及び画像生成部330の各種処理を制御する。例えば、制御部360は、入力装置32を介して操作者から入力された各種設定要求や、内部記憶部350から読込んだ各種制御プログラムおよび各種設定情報などに基づき、各種処理を制御したり、画像メモリ340が記憶する表示用画像をモニタ33にて表示するように制御したりする。
【0090】
例えば、制御部360は、画像生成部330によって生成された第1の超音波画像と第2の超音波画像とをモニタ33にて同時に表示させる。また、制御部360は、第1の超音波画像及び前記第2の超音波画像のうち、少なくとも一方とともに、穿刺針を誘導するための穿刺マーカを表示するように制御する。ここで、制御部360は、第2の超音波探触子群17の固定位置が可変にされた場合には、3次元画像、2次元画像及び3次元画像と2次元画像とを合成した画像に表示している穿刺針を誘導するための穿刺マーカの表示位置を、第2の超音波探触子群17の固定位置の変化に対応して変化させる。
【0091】
上述したように、第7の実施形態によれば、画像生成部330は、第1の超音波探触子群14によって送受信された超音波に基づく第1の超音波画像と、第2の超音波探触子群17によって送受信された超音波に基づく第2の超音波画像とをそれぞれ生成する。そして、制御部360は、画像生成部330によって生成された第1の超音波画像と第2の超音波画像とを表示部にて同時に表示させる。従って、第7の実施形態に係る超音波診断装置1は、穿刺術に実行しやすい画像を穿刺術者に提供することを可能にする。
【0092】
また、第7の実施形態によれば、画像生成部330は、第1の超音波画像と第2の超音波画像とをそれぞれ異なる色調で生成する。従って、第7の実施形態に係る超音波診断装置1は、それぞれの画像を認識しやすい画像を提表示することを可能にする。
【0093】
また、第7の実施形態によれば、制御部360は、第1の超音波画像及び第2の超音波画像のうち、少なくとも一方とともに、穿刺針を誘導するための穿刺マーカを表示するように制御する。従って、第7の実施形態に係る超音波診断装置1は、穿刺術の安全性をさらに向上させることを可能にする。
【0094】
以上説明したとおり、第1〜第7の実施形態によれば、穿刺時に、高精度で広範囲の超音波画像が得られ、かつ、操作性の低下を抑止することができる超音波プローブ及び超音波診断装置を提供することを可能にする。
【0095】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0096】
1 超音波診断装置
10 超音波プローブ
14 第1の超音波探触子群
17 第2の超音波探触子群
【特許請求の範囲】
【請求項1】
超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動されることで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列された第1の超音波探触子群と、
前記第1の超音波探触子群によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列された第2の超音波探触子群と、
を備えたことを特徴とする超音波プローブ。
【請求項2】
前記第2の超音波探触子群は、当該第2の超音波探触子群における超音波探触子の配列方向が、前記第1の超音波探触子群における超音波探触子の配列方向と略平行となるように配置されることを特徴とする請求項1に記載の超音波プローブ。
【請求項3】
前記第2の超音波探触子群は、前記第1の超音波探触子群の中心の方向に傾いて配置されることを特徴とする請求項2に記載の超音波プローブ。
【請求項4】
前記第2の超音波探触子群は、当該第2の超音波探触子群における超音波探触子の配列方向と直交する方向に揺動され、任意の位置で固定されることを特徴とする請求項1〜3のいずれか一つに記載の超音波プローブ。
【請求項5】
前記第2の超音波探触子群は、前記第1の超音波探触子群において音響放射面に対向する面側に配置され、当該第2の超音波探触子群による超音波の送受信は、前記第1の超音波探触子群が前記超音波の走査面近傍に位置しないことを条件に、実行されることを特徴とする請求項1〜3のいずれか一つに記載の超音波プローブ。
【請求項6】
前記第1の超音波探触子群における超音波探触子間の距離と、前記第2の超音波探触子群における超音波探触子間の距離とが略同一であることを特徴とする請求項1〜5のいずれか一つに記載の超音波プローブ。
【請求項7】
前記第1の超音波探触子群の前記配列方向と直交する方向の幅と、前記第2の超音波探触子群の前記配列方向と直交する方向の幅とが略同一であることを特徴とする請求項1〜6のいずれか一つに記載の超音波プローブ。
【請求項8】
前記第2の超音波探触子群の走査面に穿刺針を誘導するための穿刺針装着機構、或いは、穿刺針案内器具を装着する装着機構を備えたことを特徴とする請求項1〜7のいずれか一つに記載の超音波プローブ。
【請求項9】
請求項1〜8のいずれか一つに記載の超音波プローブを備え、
前記超音波プローブによって送受信された超音波に基づいて、超音波画像を生成する画像生成手段と、
前記画像生成手段によって生成された超音波画像を表示部にて表示するように制御する表示制御手段と、
を備えたことを特徴とする超音波診断装置。
【請求項10】
前記画像生成手段は、前記第1の超音波探触子群によって送受信された超音波に基づく第1の超音波画像と、前記第2の超音波探触子群によって送受信された超音波に基づく第2の超音波画像とをそれぞれ生成し、
前記表示制御手段は、前記画像生成手段によって生成された第1の超音波画像と第2の超音波画像とを表示部にて同時に表示させることを特徴とする請求項9に記載の超音波診断装置。
【請求項11】
前記画像生成手段は、第1の超音波画像と第2の超音波画像とをそれぞれ異なる色調で生成することを特徴とする請求項10に記載の超音波診断装置。
【請求項12】
前記表示制御手段は、前記第1の超音波画像及び前記第2の超音波画像のうち、少なくとも一方とともに、穿刺針を誘導するための穿刺マーカを表示するように制御することを特徴とする請求項10又は11に記載の超音波診断装置。
【請求項1】
超音波探触子の配列方向と平行な面を走査しながら、当該配列方向と直交する方向に揺動されることで、被検体を3次元的に走査する複数の超音波探触子が1次元的に配列された第1の超音波探触子群と、
前記第1の超音波探触子群によって走査される複数の走査面のうち、いずれかの走査面を走査する複数の超音波探触子が1次元的に配列された第2の超音波探触子群と、
を備えたことを特徴とする超音波プローブ。
【請求項2】
前記第2の超音波探触子群は、当該第2の超音波探触子群における超音波探触子の配列方向が、前記第1の超音波探触子群における超音波探触子の配列方向と略平行となるように配置されることを特徴とする請求項1に記載の超音波プローブ。
【請求項3】
前記第2の超音波探触子群は、前記第1の超音波探触子群の中心の方向に傾いて配置されることを特徴とする請求項2に記載の超音波プローブ。
【請求項4】
前記第2の超音波探触子群は、当該第2の超音波探触子群における超音波探触子の配列方向と直交する方向に揺動され、任意の位置で固定されることを特徴とする請求項1〜3のいずれか一つに記載の超音波プローブ。
【請求項5】
前記第2の超音波探触子群は、前記第1の超音波探触子群において音響放射面に対向する面側に配置され、当該第2の超音波探触子群による超音波の送受信は、前記第1の超音波探触子群が前記超音波の走査面近傍に位置しないことを条件に、実行されることを特徴とする請求項1〜3のいずれか一つに記載の超音波プローブ。
【請求項6】
前記第1の超音波探触子群における超音波探触子間の距離と、前記第2の超音波探触子群における超音波探触子間の距離とが略同一であることを特徴とする請求項1〜5のいずれか一つに記載の超音波プローブ。
【請求項7】
前記第1の超音波探触子群の前記配列方向と直交する方向の幅と、前記第2の超音波探触子群の前記配列方向と直交する方向の幅とが略同一であることを特徴とする請求項1〜6のいずれか一つに記載の超音波プローブ。
【請求項8】
前記第2の超音波探触子群の走査面に穿刺針を誘導するための穿刺針装着機構、或いは、穿刺針案内器具を装着する装着機構を備えたことを特徴とする請求項1〜7のいずれか一つに記載の超音波プローブ。
【請求項9】
請求項1〜8のいずれか一つに記載の超音波プローブを備え、
前記超音波プローブによって送受信された超音波に基づいて、超音波画像を生成する画像生成手段と、
前記画像生成手段によって生成された超音波画像を表示部にて表示するように制御する表示制御手段と、
を備えたことを特徴とする超音波診断装置。
【請求項10】
前記画像生成手段は、前記第1の超音波探触子群によって送受信された超音波に基づく第1の超音波画像と、前記第2の超音波探触子群によって送受信された超音波に基づく第2の超音波画像とをそれぞれ生成し、
前記表示制御手段は、前記画像生成手段によって生成された第1の超音波画像と第2の超音波画像とを表示部にて同時に表示させることを特徴とする請求項9に記載の超音波診断装置。
【請求項11】
前記画像生成手段は、第1の超音波画像と第2の超音波画像とをそれぞれ異なる色調で生成することを特徴とする請求項10に記載の超音波診断装置。
【請求項12】
前記表示制御手段は、前記第1の超音波画像及び前記第2の超音波画像のうち、少なくとも一方とともに、穿刺針を誘導するための穿刺マーカを表示するように制御することを特徴とする請求項10又は11に記載の超音波診断装置。
【図1A】


【図1B】
【図1C】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図6C】
【図7A】
【図7B】
【図7C】
【図8A】

【図8B】
【図8C】
【図8D】
【図9】
【図1B】
【図1C】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図6C】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図8D】
【図9】
【公開番号】特開2013−94619(P2013−94619A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−243271(P2011−243271)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]