
超音波モータ
【目的】 耐久性の高い超音波モータ。
【構成】 ステータまたはロータの摺動面に貼設する摩擦材12に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用する。さらに摩擦材の炭素繊維の方向をロータの回転方向に向ける。さらにまた、摩擦材12と摺動する相手材のロータまたはステータの摺動面34をビッカース硬度Hv550以上とする。
【効果】 大きな駆動トルクを発生しながらも、摩擦材の耐摩耗性が大きく、超音波モータとして耐久性が高く、寿命の長いものである。
【構成】 ステータまたはロータの摺動面に貼設する摩擦材12に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用する。さらに摩擦材の炭素繊維の方向をロータの回転方向に向ける。さらにまた、摩擦材12と摺動する相手材のロータまたはステータの摺動面34をビッカース硬度Hv550以上とする。
【効果】 大きな駆動トルクを発生しながらも、摩擦材の耐摩耗性が大きく、超音波モータとして耐久性が高く、寿命の長いものである。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は超音波モータの摩擦材に関するものである。
【0002】
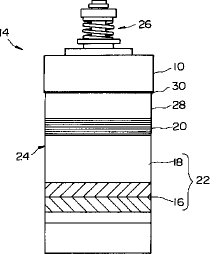
【従来の技術】超音波モータの一例を図3に示す。図3に示す円柱状の複合振動子形超音波モータ14は、ねじり振動子22と縦変位型圧電素子20とステータヘッド28からなるステータ24とその上に回転自在に結合されたロータ10から概略構成されている。ねじり振動子22はチタン酸ジルコン酸鉛などのような圧電材料からなる積層圧電体16とその上に配置される円柱状振動子18からなる。ねじり振動子22の上には作動時にはクラッチとして動作する縦変位型圧電素子20とステータヘッド28が配置される。ステータヘッド28のロータ10との接触する面がステータ摺動面であり、ステータ摺動面には摩擦材30が貼着されている。ロータ10はスプリング26を介してボルト締めされており、これによりロータ10は、一定圧力(予圧)でステータ24の摩擦材30に押圧されている。
【0003】上記構成の複合振動子形超音波モータ14において、ねじり振動子22の共振振動数の印加電圧をねじり振動子22と縦変位型圧電素子20とにそれぞれ印加する。すると、ねじり振動子22にねじり振動が発生すると共に、縦変位型圧電素子20が伸縮する。これらの振動の組み合わせによって、ロータ10を一方向に連続回転させることができる。
【0004】
【発明が解決しようとする課題】複合振動子形超音波モータを始めとする超音波モータの駆動トルクはステータヘッド28(実質上、摩擦材30)とロータ10との間の摩擦力に負うところが大きい。即ち、摩擦材30にある程度の摩擦係数がないと大きな駆動トルクを発生させることができない。さらに、摩擦材30の耐摩耗性は超音波モータ自体の耐久性および寿命を左右するものである。そこで、摩擦材には、10000時間の駆動時間に耐えると共に、所定の駆動トルクを発生できるものが要求されている。
【0005】一般に、摩擦材30にはポリイミド系樹脂が使われているが、必ずしも満足な結果を得ることのできるものではなかった。
【0006】本発明は前記課題を解決するためになされたもので、摩擦材に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、さらに摩擦材の炭素繊維の方向をロータの回転方向に仕向けることで、大きな駆動トルクを発生しながらも、耐久性が高く、寿命の長い超音波モータを提供するものである。
【0007】
【課題を解決するための手段】請求項1記載の超音波モータは、圧電素子を有するステータとロータが回転自在に結合され、ステータまたはロータの摺動面に摩擦材が貼着されてなる超音波モータにおいて、前記摩擦材は炭素繊維の方向が一方向の炭素繊維強化プラスチックからなる。そして、その炭素繊維の方向がロータの回転方向である。さらに、摩擦材と摺動する相手材のロータまたはステータの摺動面がビッカース硬度Hv550以上であることを特徴とするものである。
【0008】請求項2記載の超音波モータは、摩擦材と摺動する相手材のロータまたはステータの摺動面の表面粗度が Ra 0.03以下であることを特徴とする請求項1記載の超音波モータである。
【0009】
【作用】本発明の超音波モータではステータヘッド本体とロータの間に介在する摩擦材として、炭素繊維が一方向に並んでいる炭素繊維強化プラスチックを使用する。さらに、摩擦材の貼設は、炭素繊維の方向がロータの回転方向に沿うようにする。上記材料および構成を適用することで、摩擦材の摩擦係数を低下させることなく、耐摩耗性が向上するので、本発明の超音波モータでは、駆動トルクを高めたうえで、寿命を延すことができる。
【0010】
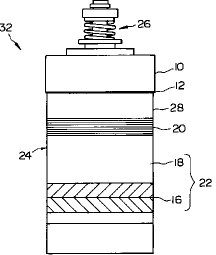
【実施例】(実施例1)本実施例の複合振動子形超音波モータを図1と図2を参照して説明する。この円柱状の複合振動子形超音波モータ32は、ねじり振動子22と縦変位型圧電素子20とステータヘッド28からなるステータ24とその上に回転自在に結合されたロータ10から概略構成されている。ねじり振動子22はチタン酸ジルコン酸鉛などのような圧電材料からなる積層圧電体16とその上に配置される円柱状振動子18からなる。ねじり振動子22の上には作動時にはクラッチとして動作する縦変位型圧電素子20とステータヘッド28が配置される。ステータヘッド28のロータ10と接触する面がステータ摺動面34であり、ステータヘッド28のステータ摺動面34には摩擦材12が貼着されている。ロータ10はスプリング26を介してボルト締めされており、これによりロータ10は、一定圧力(予圧)でステータ24の摩擦材12に押圧されている。
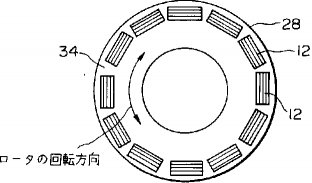
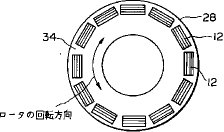
【0011】本発明の超音波モータ32の摩擦材12では、炭素繊維をマトリックス樹脂に含浸させた炭素繊維強化プラスチック(CFRP)を使用し、特に、炭素繊維強化プラスチックに含浸されている炭素繊維が一方向に並んでいるものを使用する。そして、図1に示すように、摩擦材12の炭素繊維の方向がロータ10の回転方向に極力沿うようにステータヘッド28のステータ摺動面34に貼着する。この際、炭素繊維の方向が図1に示すように、ロータ10の回転方向の接線方向であるものの他、連環状であっても本発明の範囲内であることは勿論である。マトリックス樹脂は限定されるものではないが、特に、エポキシ樹脂が好適である。
【0012】複合振動子形超音波モータ32の駆動トルクや耐久性には摩擦材12の他にその摺動相手となるロータ10の材質も重要である。その為、ロータ10の摩擦材12と接触するロータ摺動面はビッカース硬度Hv550以上のものが好ましく、ロータ摺動面に硬質クロムメッキや窒化チタン(TiN)コーティングを施したものや、ロータ10全体もしくはロータ摺動面を含む一部をマルテンサイト・ステンレス鋼(特に、SUS 440C)を焼入れして硬度を高めたものを使用することが適している。さらに、ロータ10のロータ摺動面は鏡面仕上にして、表面粗度が Ra 0.03μm以下とするとさらに良い。
【0013】上記構成の複合振動子形超音波モータ32において、ねじり振動子22の共振振動数の印加電圧をねじり振動子22と縦変位型圧電素子20とにそれぞれ印加する。すると、ねじり振動子22にねじり振動が発生すると共に、縦変位型圧電素子20が伸縮する。これによって、ロータ10を一方向に連続回転させることができる。
【0014】本実施例の複合振動子形超音波モータの耐久試験を行なった。試験には直径が30mmの円筒状の複合振動子形超音波モータを使用し、負荷を7Kgf・cmとし、回転数83rpmで連続回転させ、摩擦材の摩耗性を調べた。比較例として、摩擦材が、従来のポリイミド系樹脂のものと、炭素繊維強化プラスッチクを使用して、その炭素繊維の方向がステータのステータ摺動面に対して垂直方向に向けたものと、炭素繊維の方向をロータの半径方向に向けたものを使用した。本実施例の複合振動子形超音波モータの摩擦材においては、連続駆動時間が50時間であっても摩擦材に摩耗がみられなかった。さらに、ロータの回転ムラやステータ摺動面からの異音の発生も抑えられた。しかしながら、比較例として採り上げた摩擦材の試験結果はどれも不良であり、ポリイミド系樹脂の摩擦材は連続駆動時間が2.5時間で不良となった。本実施例の複合振動子形超音波モータはステータヘッドのステータ摺動面に貼設する摩擦材に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、さらに摩擦材の炭素繊維の方向をロータの回転方向に仕向けることで、大きな駆動トルクを発生しながらも、耐摩耗性が大きく、複合振動子形超音波モータとして耐久性が高く、寿命の長いものである。
【0015】尚、本実施例では複合振動子形超音波モータを一実施例として採り上げているが、進行波形超音波モータであっても同様な構成、効果を得られることは勿論である。
【0016】(実施例2)摩擦材は実施例1の複合振動子形超音波モータのように、ステータヘッドのステータ摺動面に貼設するだけでなく、ロータ側に貼設することも可能である。即ち、実施例2としての複合振動子形超音波モータでは、摩擦材に炭素繊維をマトリックス樹脂に含浸させて炭素繊維が一方向に並んでいる炭素繊維強化プラスチック(CFRP)を使用し、摩擦材の炭素繊維の方向がロータの回転方向に沿うようにロータのロータ摺動面に貼着する。この際、炭素繊維の方向が、ロータの回転方向の接線方向であるものや連環状であっても本発明の範囲内であることは勿論である。さらに、ステータヘッドのステータ摺動面が実施例2の複合振動子形超音波モータの駆動トルクや耐久性には重要となる。その為、ステータヘッドのステータ摺動面はビッカース硬度Hv550以上のものが好ましく、ステータ摺動面に硬質クロムメッキや窒化チタン(TiN)コーティングを施したものや、ステータヘッド全体もしくはステータ摺動面を含む一部をマルテンサイト・ステンレス鋼(特に、SUS 440C)を焼入れして硬度を高めたものを使用することが好適である。さらに、ステータヘッドのステータ摺動面を鏡面仕上にし、表面粗度が Ra0.03μm以下とするとさらに良い。実施例2の複合振動子形超音波モータは摩擦材として炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、この摩擦材をロータのロータ摺動面に貼設し、さらに摩擦材の炭素繊維の方向をロータの回転方向に仕向けることで、大きな駆動トルクを発生しながらも、耐摩耗性が大きく、複合振動子形超音波モータとして耐久性が高く、寿命の長いものである。尚、本実施例に使用される摩擦材は複合振動子形超音波モータに限られるものではなく、進行波を生ずる振動子からなる進行波形超音波モータにも適する。
【0017】
【発明の効果】本発明の超音波モータは、ステータヘッドのステータ摺動面またはロータのロータ摺動面に貼設する摩擦材に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、さらに摩擦材の炭素繊維の方向をロータの回転方向に向けたもので、大きな駆動トルクを発生しながらも、耐摩耗性が大きく、超音波モータとして耐久性が高く、寿命の長いものである。さらに、摩擦材と摺動する相手材にビッカース硬度Hv550以上のものを使用することでより耐久性が向上する。さらにまた、摩擦材と摺動する相手材のロータまたはステータの摺動面の表面粗度を Ra 0.03以下とすることで、より耐久性が向上する。
【図面の簡単な説明】
【図1】実施例1の摩擦材がステータヘッドに貼設されているところを示す平面図である。
【図2】実施例1の超音波モータの側面図である。
【図3】従来例の超音波モータの側面図である。
【符号の説明】
10 ロータ
12 摩擦材
14 超音波モータ
16 積層圧電体
20 縦変位型圧電素子
22 ねじり振動子
24 ステータ
28 ステータヘッド
30 摩擦材
32 超音波モータ
34 ステータ摺動面
【0001】
【産業上の利用分野】本発明は超音波モータの摩擦材に関するものである。
【0002】
【従来の技術】超音波モータの一例を図3に示す。図3に示す円柱状の複合振動子形超音波モータ14は、ねじり振動子22と縦変位型圧電素子20とステータヘッド28からなるステータ24とその上に回転自在に結合されたロータ10から概略構成されている。ねじり振動子22はチタン酸ジルコン酸鉛などのような圧電材料からなる積層圧電体16とその上に配置される円柱状振動子18からなる。ねじり振動子22の上には作動時にはクラッチとして動作する縦変位型圧電素子20とステータヘッド28が配置される。ステータヘッド28のロータ10との接触する面がステータ摺動面であり、ステータ摺動面には摩擦材30が貼着されている。ロータ10はスプリング26を介してボルト締めされており、これによりロータ10は、一定圧力(予圧)でステータ24の摩擦材30に押圧されている。
【0003】上記構成の複合振動子形超音波モータ14において、ねじり振動子22の共振振動数の印加電圧をねじり振動子22と縦変位型圧電素子20とにそれぞれ印加する。すると、ねじり振動子22にねじり振動が発生すると共に、縦変位型圧電素子20が伸縮する。これらの振動の組み合わせによって、ロータ10を一方向に連続回転させることができる。
【0004】
【発明が解決しようとする課題】複合振動子形超音波モータを始めとする超音波モータの駆動トルクはステータヘッド28(実質上、摩擦材30)とロータ10との間の摩擦力に負うところが大きい。即ち、摩擦材30にある程度の摩擦係数がないと大きな駆動トルクを発生させることができない。さらに、摩擦材30の耐摩耗性は超音波モータ自体の耐久性および寿命を左右するものである。そこで、摩擦材には、10000時間の駆動時間に耐えると共に、所定の駆動トルクを発生できるものが要求されている。
【0005】一般に、摩擦材30にはポリイミド系樹脂が使われているが、必ずしも満足な結果を得ることのできるものではなかった。
【0006】本発明は前記課題を解決するためになされたもので、摩擦材に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、さらに摩擦材の炭素繊維の方向をロータの回転方向に仕向けることで、大きな駆動トルクを発生しながらも、耐久性が高く、寿命の長い超音波モータを提供するものである。
【0007】
【課題を解決するための手段】請求項1記載の超音波モータは、圧電素子を有するステータとロータが回転自在に結合され、ステータまたはロータの摺動面に摩擦材が貼着されてなる超音波モータにおいて、前記摩擦材は炭素繊維の方向が一方向の炭素繊維強化プラスチックからなる。そして、その炭素繊維の方向がロータの回転方向である。さらに、摩擦材と摺動する相手材のロータまたはステータの摺動面がビッカース硬度Hv550以上であることを特徴とするものである。
【0008】請求項2記載の超音波モータは、摩擦材と摺動する相手材のロータまたはステータの摺動面の表面粗度が Ra 0.03以下であることを特徴とする請求項1記載の超音波モータである。
【0009】
【作用】本発明の超音波モータではステータヘッド本体とロータの間に介在する摩擦材として、炭素繊維が一方向に並んでいる炭素繊維強化プラスチックを使用する。さらに、摩擦材の貼設は、炭素繊維の方向がロータの回転方向に沿うようにする。上記材料および構成を適用することで、摩擦材の摩擦係数を低下させることなく、耐摩耗性が向上するので、本発明の超音波モータでは、駆動トルクを高めたうえで、寿命を延すことができる。
【0010】
【実施例】(実施例1)本実施例の複合振動子形超音波モータを図1と図2を参照して説明する。この円柱状の複合振動子形超音波モータ32は、ねじり振動子22と縦変位型圧電素子20とステータヘッド28からなるステータ24とその上に回転自在に結合されたロータ10から概略構成されている。ねじり振動子22はチタン酸ジルコン酸鉛などのような圧電材料からなる積層圧電体16とその上に配置される円柱状振動子18からなる。ねじり振動子22の上には作動時にはクラッチとして動作する縦変位型圧電素子20とステータヘッド28が配置される。ステータヘッド28のロータ10と接触する面がステータ摺動面34であり、ステータヘッド28のステータ摺動面34には摩擦材12が貼着されている。ロータ10はスプリング26を介してボルト締めされており、これによりロータ10は、一定圧力(予圧)でステータ24の摩擦材12に押圧されている。
【0011】本発明の超音波モータ32の摩擦材12では、炭素繊維をマトリックス樹脂に含浸させた炭素繊維強化プラスチック(CFRP)を使用し、特に、炭素繊維強化プラスチックに含浸されている炭素繊維が一方向に並んでいるものを使用する。そして、図1に示すように、摩擦材12の炭素繊維の方向がロータ10の回転方向に極力沿うようにステータヘッド28のステータ摺動面34に貼着する。この際、炭素繊維の方向が図1に示すように、ロータ10の回転方向の接線方向であるものの他、連環状であっても本発明の範囲内であることは勿論である。マトリックス樹脂は限定されるものではないが、特に、エポキシ樹脂が好適である。
【0012】複合振動子形超音波モータ32の駆動トルクや耐久性には摩擦材12の他にその摺動相手となるロータ10の材質も重要である。その為、ロータ10の摩擦材12と接触するロータ摺動面はビッカース硬度Hv550以上のものが好ましく、ロータ摺動面に硬質クロムメッキや窒化チタン(TiN)コーティングを施したものや、ロータ10全体もしくはロータ摺動面を含む一部をマルテンサイト・ステンレス鋼(特に、SUS 440C)を焼入れして硬度を高めたものを使用することが適している。さらに、ロータ10のロータ摺動面は鏡面仕上にして、表面粗度が Ra 0.03μm以下とするとさらに良い。
【0013】上記構成の複合振動子形超音波モータ32において、ねじり振動子22の共振振動数の印加電圧をねじり振動子22と縦変位型圧電素子20とにそれぞれ印加する。すると、ねじり振動子22にねじり振動が発生すると共に、縦変位型圧電素子20が伸縮する。これによって、ロータ10を一方向に連続回転させることができる。
【0014】本実施例の複合振動子形超音波モータの耐久試験を行なった。試験には直径が30mmの円筒状の複合振動子形超音波モータを使用し、負荷を7Kgf・cmとし、回転数83rpmで連続回転させ、摩擦材の摩耗性を調べた。比較例として、摩擦材が、従来のポリイミド系樹脂のものと、炭素繊維強化プラスッチクを使用して、その炭素繊維の方向がステータのステータ摺動面に対して垂直方向に向けたものと、炭素繊維の方向をロータの半径方向に向けたものを使用した。本実施例の複合振動子形超音波モータの摩擦材においては、連続駆動時間が50時間であっても摩擦材に摩耗がみられなかった。さらに、ロータの回転ムラやステータ摺動面からの異音の発生も抑えられた。しかしながら、比較例として採り上げた摩擦材の試験結果はどれも不良であり、ポリイミド系樹脂の摩擦材は連続駆動時間が2.5時間で不良となった。本実施例の複合振動子形超音波モータはステータヘッドのステータ摺動面に貼設する摩擦材に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、さらに摩擦材の炭素繊維の方向をロータの回転方向に仕向けることで、大きな駆動トルクを発生しながらも、耐摩耗性が大きく、複合振動子形超音波モータとして耐久性が高く、寿命の長いものである。
【0015】尚、本実施例では複合振動子形超音波モータを一実施例として採り上げているが、進行波形超音波モータであっても同様な構成、効果を得られることは勿論である。
【0016】(実施例2)摩擦材は実施例1の複合振動子形超音波モータのように、ステータヘッドのステータ摺動面に貼設するだけでなく、ロータ側に貼設することも可能である。即ち、実施例2としての複合振動子形超音波モータでは、摩擦材に炭素繊維をマトリックス樹脂に含浸させて炭素繊維が一方向に並んでいる炭素繊維強化プラスチック(CFRP)を使用し、摩擦材の炭素繊維の方向がロータの回転方向に沿うようにロータのロータ摺動面に貼着する。この際、炭素繊維の方向が、ロータの回転方向の接線方向であるものや連環状であっても本発明の範囲内であることは勿論である。さらに、ステータヘッドのステータ摺動面が実施例2の複合振動子形超音波モータの駆動トルクや耐久性には重要となる。その為、ステータヘッドのステータ摺動面はビッカース硬度Hv550以上のものが好ましく、ステータ摺動面に硬質クロムメッキや窒化チタン(TiN)コーティングを施したものや、ステータヘッド全体もしくはステータ摺動面を含む一部をマルテンサイト・ステンレス鋼(特に、SUS 440C)を焼入れして硬度を高めたものを使用することが好適である。さらに、ステータヘッドのステータ摺動面を鏡面仕上にし、表面粗度が Ra0.03μm以下とするとさらに良い。実施例2の複合振動子形超音波モータは摩擦材として炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、この摩擦材をロータのロータ摺動面に貼設し、さらに摩擦材の炭素繊維の方向をロータの回転方向に仕向けることで、大きな駆動トルクを発生しながらも、耐摩耗性が大きく、複合振動子形超音波モータとして耐久性が高く、寿命の長いものである。尚、本実施例に使用される摩擦材は複合振動子形超音波モータに限られるものではなく、進行波を生ずる振動子からなる進行波形超音波モータにも適する。
【0017】
【発明の効果】本発明の超音波モータは、ステータヘッドのステータ摺動面またはロータのロータ摺動面に貼設する摩擦材に炭素繊維の方向が一方向の炭素繊維強化プラスチックを使用し、さらに摩擦材の炭素繊維の方向をロータの回転方向に向けたもので、大きな駆動トルクを発生しながらも、耐摩耗性が大きく、超音波モータとして耐久性が高く、寿命の長いものである。さらに、摩擦材と摺動する相手材にビッカース硬度Hv550以上のものを使用することでより耐久性が向上する。さらにまた、摩擦材と摺動する相手材のロータまたはステータの摺動面の表面粗度を Ra 0.03以下とすることで、より耐久性が向上する。
【図面の簡単な説明】
【図1】実施例1の摩擦材がステータヘッドに貼設されているところを示す平面図である。
【図2】実施例1の超音波モータの側面図である。
【図3】従来例の超音波モータの側面図である。
【符号の説明】
10 ロータ
12 摩擦材
14 超音波モータ
16 積層圧電体
20 縦変位型圧電素子
22 ねじり振動子
24 ステータ
28 ステータヘッド
30 摩擦材
32 超音波モータ
34 ステータ摺動面
【特許請求の範囲】
【請求項1】 圧電素子を有するステータとロータが回転自在に結合され、ステータまたはロータの摺動面に摩擦材が貼着されてなる超音波モータにおいて、前記摩擦材は炭素繊維の方向が一方向の炭素繊維強化プラスチックからなり、該炭素繊維の方向がロータの回転方向であり、摩擦材と摺動する相手材のロータまたはステータの摺動面がビッカース硬度Hv550以上であることを特徴とする超音波モータ。
【請求項2】 摩擦材と摺動する相手材のロータまたはステータの摺動面の表面粗度が Ra 0.03以下であることを特徴とする請求項1記載の超音波モータ。
【請求項1】 圧電素子を有するステータとロータが回転自在に結合され、ステータまたはロータの摺動面に摩擦材が貼着されてなる超音波モータにおいて、前記摩擦材は炭素繊維の方向が一方向の炭素繊維強化プラスチックからなり、該炭素繊維の方向がロータの回転方向であり、摩擦材と摺動する相手材のロータまたはステータの摺動面がビッカース硬度Hv550以上であることを特徴とする超音波モータ。
【請求項2】 摩擦材と摺動する相手材のロータまたはステータの摺動面の表面粗度が Ra 0.03以下であることを特徴とする請求項1記載の超音波モータ。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開平5−83960
【公開日】平成5年(1993)4月2日
【国際特許分類】
【出願番号】特願平3−140459
【出願日】平成3年(1991)6月12日
【出願人】(000010098)アルプス電気株式会社 (4,263)
【公開日】平成5年(1993)4月2日
【国際特許分類】
【出願日】平成3年(1991)6月12日
【出願人】(000010098)アルプス電気株式会社 (4,263)
[ Back to top ]