
超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置
【課題】より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供する。
【解決手段】超音波ラインセンサは、振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、前記各超音波センサの振動面と検出対象との間に設けられ、超音波を遮断する吸音部材と、を具備し、前記吸音部材は、前記検出対象の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記検出対象の搬送方向と平行な2辺を持つように設けられる。
【解決手段】超音波ラインセンサは、振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、前記各超音波センサの振動面と検出対象との間に設けられ、超音波を遮断する吸音部材と、を具備し、前記吸音部材は、前記検出対象の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記検出対象の搬送方向と平行な2辺を持つように設けられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置に関する。
【背景技術】
【0002】
従来、例えば紙幣などの紙葉類の計数及び判別を行う紙葉類処理装置(紙幣処理装置)が実用化されている。紙葉類処理装置は、投入部に投入された紙葉類を1枚ずつ取り込み、紙葉類の検査装置に搬送する。検査装置は、紙葉類に対して種々の処理を行い紙葉類の状態を判別する。例えば、紙葉類処理装置は、検査装置の検査結果に基づいて、紙葉類の種類判定、及び真偽判定などを行う。
【0003】
また、紙葉類処理装置は、例えばテープなどの異物が貼付された紙葉類を再流通に適さない紙葉類であると判断する。紙葉類処理装置は、例えばテープなどの異物が貼付された紙葉類を再流通に適さない紙葉類であると判断する。さらに、紙葉類処理装置は、2枚以上重なっている紙葉類(重券)を検知する。紙葉類処理装置は、検知した重券を排除する。
【0004】
例えば、検査装置は、紙葉類に超音波を照射し、透過波、または反射波を検出することにより、紙葉類に貼付されているテープなどの異物の有無を検出する。さらに、検査装置は、紙葉類に超音波を照射し、透過波を検出することにより、紙葉類の重なりを検出する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−351141号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記した検査装置に用いられる超音波センサを備える送信器は、圧電素子に信号を入力し、圧電素子に接して設置される振動面を振動させる。これにより、送信器は、信号に応じた波を空気中に出力する。
【0007】
また、検査装置に用いられる超音波センサを備える受信器は、圧電素子に接して設置される振動面の振動に応じて変形する圧電素子により生成される電気信号を検出信号として得る。
【0008】
超音波センサの形状は、駆動原理の為に円状に限定される。しかし、紙葉類に付着する異物は、搬送方向と平行に直線状の軌跡を描いて移動する。この為、異物の位置と超音波センサの位置とによっては、検査装置は、高い精度で超音波を検出することができない可能性がある。
【0009】
そこで、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
一実施形態に係る超音波ラインセンサは、振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、前記各超音波センサの振動面と検出対象との間に設けられ、超音波を遮断する吸音部材と、を具備し、前記吸音部材は、前記検出対象の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記検出対象の搬送方向と平行な2辺を持つように設けられる。
【図面の簡単な説明】
【0011】
【図1】図1は、一実施形態に係る紙葉類処理装置の外観について説明するための説明図である。
【図2】図2は、図1に示す紙葉類処理装置の構成例について説明するための説明図である。
【図3】図3は、図1及び図2に示す紙葉類処理装置の制御系の構成例について説明するための説明図である。
【図4】図4は、図2及び図3に示す異物検出装置の構成例について説明するための説明図である。
【図5】図5は、図4に示す異物検出装置の制御系の構成例について説明するための説明図である。
【図6】図6は、図4に示す異物検出装置の受信部及び吸音部材の構成例について説明するための説明図である。
【図7】図7は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図8】図8は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図9】図9は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図10】図10は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図11】図11は、図4に示す異物検出装置の受信部及び吸音部材の他の構成例について説明するための説明図である。
【図12】図12は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図13】図13は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図14】図14は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図15】図15は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図16】図16は、図4に示す異物検出装置の受信部及び吸音部材のさらに他の構成例について説明するための説明図である。
【図17】図17は、図16に示す異物検出装置の受信部及び吸音部材の例について説明するための説明図である。
【図18】図18は、図4に示す異物検出装置の受信部及び吸音部材のさらに他の構成例について説明するための説明図である。
【図19】図19は、図18に示す異物検出装置の受信部及び吸音部材の例について説明するための説明図である。
【図20】図20は、図4に示す異物検出装置の受信部及び吸音部材のさらに他の構成例について説明するための説明図である。
【発明を実施するための形態】
【0012】
以下、図面を参照しながら、一実施形態に係る超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置について詳細に説明する。
【0013】
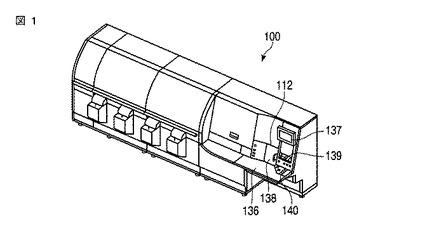
図1は、一実施形態に係る紙葉類処理装置(紙幣処理装置)100の外観について説明するための説明図である。
図1に示すように、紙葉類処理装置100は、装置外部に、投入部112、操作部136、操作表示部137、ドア138、取出口139、及びキーボード140を備えている。
【0014】
投入部112は、例えば紙幣などの紙葉類7を投入するための構成である。投入部112は、重ねられた状態の紙葉類7をまとめて受け入れる。操作部136は、オペレータによる各種操作入力を受け付ける。操作表示部137は、オペレータに対して各種の操作案内、及び処理結果などを表示する。なお、操作表示部137は、タッチパネルとして構成されていてもよい。この場合、紙葉類処理装置100は、操作表示部137に表示されるボタンと、操作表示部137に対するオペレータによる操作と、に基づいて、各種の操作入力を検知する。
【0015】
ドア138は、投入部112の投入口を開閉する為のドアである。取出口139は、紙葉類処理装置100により再流通不可と判断された紙葉類7がスタックされる集積部から紙葉類7を取り出す為の構成である。キーボード140は、オペレータによる各種操作入力を受け付ける入力部として機能する。
【0016】
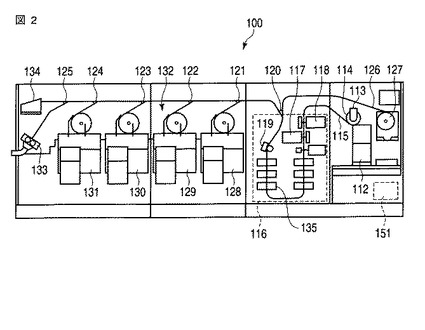
図2は、図1に示す紙葉類処理装置100の構成例について説明するための説明図である。
紙葉類処理装置100は、装置内部に、投入部112、取出部113、吸着ローラ114、搬送路115、検査部116、ゲート120乃至125、排除搬送路126、排除集積部127、集積・結束部128乃至131、裁断部133、及びスタッカ134を備える。また、紙葉類処理装置100は、主制御部151を備える。主制御部151は、紙葉類処理装置100の各部の動作を統合的に制御する。
【0017】
取出部113は、例えば投入部112の上部に設けられる。取出部113は、吸着ローラ114を備えている。吸着ローラ114は、投入部112にセットされた紙葉類7を集積方向の上端に接するように設けられている。即ち、吸着ローラ114は、回転することにより、投入部112にセットされた紙葉類7を集積方向の上端から1枚ずつ装置内部に取り込む。
【0018】
吸着ローラ114は、たとえば、1回転するごとに1枚の紙葉類7を取出すように機能する。これにより、吸着ローラ114は、紙葉類7を一定のピッチで取出す。吸着ローラ114により取り込まれた紙葉類7は、搬送路115に導入される。
【0019】
なお、投入部112、取出部113、及び吸着ローラ114は、上記した構成に限定されない。投入部112、取出部113、及び吸着ローラ114は、紙葉類7を1枚ずつ紙葉類処理装置100内に取り込む構成であれば、如何なる構成であってもよい。
【0020】
搬送路115は、紙葉類7を紙葉類処理装置100内の各部に搬送する搬送手段である。搬送路115は、図示しない搬送ベルト及び駆動プーリなどを備えている。搬送路115は、図示しない駆動モータ及び駆動プーリにより搬送ベルトを動作させる。搬送路115は、吸着ローラ114により取り込まれた紙葉類7を搬送ベルトにより一定速度で搬送する。なお、搬送路115における取出部113に近い側を上流側、スタッカ134に近い側を下流側として説明する。
【0021】
取出部113から延びた搬送路115上には、検査部116が設けられている。検査部116は、画像読取装置117、画像読取装置118、異物検出装置135、及び厚み検査部119などを備える。検査部116は、紙葉類7の光学的特徴情報、機械的特徴、及び磁気的特長情報を検出する。これにより、紙葉類処理装置100は、紙葉類7の種類、汚棄損、表裏、及び真偽などを検査する。
【0022】
画像読取装置117、及び118は、それぞれ搬送路115を挟んで対面するように設けられている。画像読取装置117、及び118は、搬送路115を搬送される紙葉類7の両面の画像を読み取る。画像読取装置117、及び118は、それぞれ、Charge Coupled Device(CCD)カメラを備える。紙葉類処理装置100は、画像読取装置117、及び118により撮像した画像に基づいて、紙葉類7の表面及び裏面の模様画像を取得する。
【0023】
画像読取装置117、及び118は、読み取った画像を検査部116内の図示しないメモリに一時的に記憶する。紙葉類処理装置100は、このメモリに記憶されている画像を操作入力に応じて操作表示部137に表示する。
【0024】
異物検出装置135は、搬送される紙葉類7に対して超音波を照射し、紙葉類7を透過する透過波を検出する。これにより、異物検出装置135は、例えば、紙葉類7に付着する異物の有無を検出する。異物検出装置135は、例えば、テープなどの貼付物を異物として検出する。また、異物検出装置135は、例えば、紙葉類7の重なり(重券)を検出する。
【0025】
厚み検査部119は、搬送路115を搬送される紙葉類7の厚みを検査する。例えば、検出した厚みが規定値以上である場合、紙葉類処理装置100は、紙葉類7の2枚取りを検出する。
【0026】
また、検査部116は、図示しない磁気センサなどを備えている。磁気センサは、紙葉類7の磁気的な特徴情報を検出する。
【0027】
主制御部151は、画像読取装置117、118、異物検出装置135、厚み検査部119、及び磁気センサなどによる検出結果に基づいて、紙葉類7が正券、損券、または排除権であるかを判定する。
【0028】
紙葉類処理装置100は、正券と判定した紙葉類7を集積・結束部128乃至131に搬送する。また、紙葉類処理装置100は、損券と判定した紙葉類7を裁断部133に搬送する。裁断部133は、搬送される損券を裁断する。なお、紙葉類処理装置100は、損券をスタッカ134に搬送し集積してもよい。スタッカ134は、集積した損券が例えば100枚に到達するごとに損券を施封する。
【0029】
排除券は、正券及び損券に該当しない紙葉類7である。紙葉類処理装置100は、排除券と判定した紙葉類7を排除集積部127に搬送する。排除券は、例えば、2枚取り券などの搬送異常券、折れまたは破れなどが存在する不良券、及び適用外券種または偽券などの判別不能券を含む。
【0030】
検査部116の下流側の搬送路115上には、ゲート120乃至125が順に配設されている。ゲート120乃至125は、それぞれ、主制御部151により制御される。主制御部151は、検査部116による検査の結果に基づいて各ゲート120乃至125の動作を制御する。これにより、主制御部151は、搬送路115を搬送されている紙葉類7を所定の処理部に搬送するように制御する。
【0031】
検査部116の直後に配設されたゲート120は、搬送路115を排除搬送路126に分岐する。即ち、ゲート120は、検査部116による検査の結果、真券ではないと判定された排除券、または、検査部116による検査を行うことができない検査不能券等を排除搬送路126に搬送するように切り替えられる。
【0032】
排除搬送路126の終端部には、排除集積部(排除部)127が設けられている。排除集積部127は、取出部113にて取出した姿勢のまま、上記したような排除券、及び検査不能券を集積する。排除集積部127に集積された紙葉類7は、取出口139から取り出すことができる。
【0033】
また、ゲート121乃至124により分岐される先には、集積・結束部128乃至131(総じて集積結束部132と称する)がそれぞれ設けられている。集積・結束部132には、再流通可能であると判定された紙葉類7が種類及び表裏毎に区別されて集積される。集積・結束部132は、集積した紙葉類7を所定枚数毎に結束して格納する。また、紙葉類処理装置100は、図示しない大束結束部により、所定枚数毎で結束した紙葉類7を複数集積し、結束する。
【0034】
ゲート125により分岐される搬送路115の先には、裁断部133が配設されている。裁断部133は、紙葉類7を裁断して収納する。ゲート125に搬送される紙葉類7は、正規の紙葉類7であり、且つ、再流通が不可能であると判定された紙葉類7(損券)である。
【0035】
また、ゲート125により分岐される他方の搬送路115の先には、スタッカ134が配設されている。主制御部151は、損券裁断モードが選択されている場合、紙葉類7を裁断部133に搬送するようにゲート125を制御する。また、主制御部151は、損券裁断モードが選択されていない場合、紙葉類7をスタッカ134に搬送するようにゲート125を制御する。
【0036】
なお、主制御部151は、集積・結束部132に集積された紙葉類7の枚数、及び、裁断部133により裁断された紙葉類7の枚数及び識別情報を逐次記憶する。
【0037】
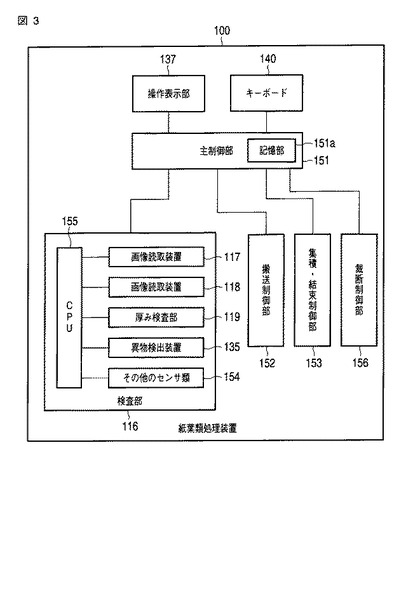
図3は、図1及び図2に示す紙葉類処理装置100の制御系の構成例について説明するためのブロック図である。
【0038】
紙葉類処理装置100は、主制御部151、検査部116、搬送制御部152、集積・結束制御部153、裁断制御部156、操作表示部137、及びキーボード140などを備える。
【0039】
主制御部151は、紙葉類処理装置100の全体的な制御を司る。主制御部151は、操作表示部137により入力される操作、及び検査部116による検査結果に基づき、搬送制御部152及び集積・結束制御部153を制御する。
【0040】
例えば、操作員は、操作表示部137またはキーボード140により、処理する紙葉類7の券種、枚数、正損判別レベル、供給元の名称、及び処理方法などを入力する。
【0041】
検査部116は、画像読取装置117、及び118、厚み検査部119、異物検出装置135、その他のセンサ類154、及びCPU155を備える。
【0042】
画像読取装置117、及び118は、搬送路115を搬送される紙葉類7の両面の画像を読み取る。画像読取装置117、及び118は、例えばCCDなどの受光素子と光学系とを備える。画像読取装置117、及び118は、搬送される紙葉類7に対して光を投光し、反射光または透過光を光学系により受光する。画像読取装置117、及び118は、光学系により受光した光をCCDに結像させ、電気信号(画像)を取得する。
【0043】
主制御部151は、紙葉類7の基準となる画像(基準画像)を記憶部151aに予め記憶する。主制御部151は、紙葉類7から取得した画像と、記憶部151aに記憶される基準画像とを比較することにより、静養類の正損判定及び偽券判定を行う。
【0044】
異物検出装置135は、上記したように、搬送される紙葉類7に対して超音波を照射する。異物検出装置135は、紙葉類7を透過する音波を検出する。また、異物検出装置135は、予め設定される基準値を記憶する。
【0045】
紙葉類7に異物が付着している場合、紙葉類7を透過する超音波(透過波)の強度が減衰する。異物検出装置135は、検出した透過波の強度(透過波強度)と予め記憶される基準値とを比較する。異物検出装置135は、比較結果に基づいて、紙葉類7に異物が付着しているか否かを判定する。
【0046】
厚み検査部119は、搬送路115を搬送される紙葉類7の厚みを検査する。その他のセンサ類154は、例えば、磁気センサなどである。磁気センサは、搬送路115を搬送される紙葉類7から磁気的な特徴情報を検出する。
【0047】
CPU155は、画像読取装置117、118、厚み検査部119、異物検出装置135、及びその他のセンサ類154などによる検査の結果に基づいて、搬送路115を搬送される紙葉類7の種類、正損、表裏、及び真偽などを判別する。
【0048】
搬送制御部152は、主制御部151の制御に基づき、取出部113、搬送路115、排除搬送路126、及びゲート120乃至125を制御する。これにより、搬送制御部152は、紙葉類7の取り込み及び搬送を制御する。また、搬送制御部152は、判定した紙葉類7の種類毎に区分する区分処理を行う。即ち、搬送制御部152は、区分処理部として機能する。
【0049】
例えば、搬送制御部152は、異物検出装置135により紙葉類7に異物が付着していることを検出する場合、紙葉類7を排除集積部127、裁断部133、またはスタッカ134に搬送するようにゲート120乃至125を制御する。
【0050】
集積・結束制御部153は、主制御部151の制御に基づき、排除集積部127及び集積・結束部128乃至131を制御する。これにより、集積・結束制御部153は、紙葉類7の集積、及び結束の制御を行なう。
【0051】
裁断制御部156は、主制御部151の制御に基づき、裁断部133の動作を制御する。これにより、裁断部133は、搬送される紙葉類7の裁断を行う。
【0052】
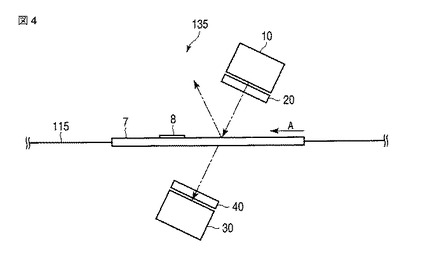
図4は、図2及び図3に示す異物検出装置135の構成例について説明するための説明図である。
紙葉類7は、例えば、図示しない搬送ベルトなどにより狭持されて図4に示す矢印Aの方向に搬送される。異物検出装置135は、紙葉類7に付着している例えばテープ、または紙片などの異物8を検出対象として検出処理を行う。これにより、異物検出装置135は、紙葉類7に付着する異物8の有無を検出する。異物検出装置135は、例えば紙葉類処理装置100の搬送路115の近傍に設置される。
【0053】
図4に示すように、異物検出装置135は、送信部10及び受信部30を備える。また、送信部10は、送信部10の振動面に設置される吸音部材20を備える。さらに、受信部30は、受信部30の振動面に設置される吸音部材40を備える。
【0054】
送信部10は、超音波センサを備える。超音波センサは、搬送方向Aに一定の速度で搬送される紙葉類7に対して超音波を照射する。超音波センサは、圧電素子と振動面とを有する。送信部10は、超音波センサの圧電素子に電圧を印加することにより、圧電体の形状を変化させる。
【0055】
送信部10は、例えば、圧電素子にパルス信号を印加することにより、圧電素子の形状を周期的に変化させる。これにより、送信部10は、振動面が振動させることができる。この結果、送信部10は、パルス信号の周期に応じた超音波を空気中に出力することができる。
【0056】
吸音部材20は、例えば、波動を吸収する素材により形成される。吸音部材20は、例えば、送信部10から出力される超音波の出力範囲を制限する。これにより、送信部10は、搬送路115を搬送される紙葉類7の所定の範囲に超音波を入力することができる。
【0057】
受信部30は、送信部10と同様の超音波センサを備える。超音波センサは、圧電素子と振動面とを有する。受信部30の超音波センサは、圧電素子の形状の変化に応じて電気信号を生成する。
【0058】
受信部30の振動面に超音波が入力される場合、振動面は、入力される超音波に応じて振動する。振動面が振動する場合、受信部30の圧電素子は、入力される超音波に応じて形状を変化させる。この結果、受信部30は、超音波の周期及び強度に応じた電気信号を生成することができる。
【0059】
受信部30は、受信部30の超音波センサの振動面が送信部10の超音波センサの振動面と対向するように設置される。即ち、受信部30の超音波センサの検出範囲に紙葉類7が存在しない場合、受信部30は、送信部10から出力された超音波を直接受信する。
【0060】
また、受信部30の超音波センサの検出範囲に紙葉類7が存在する場合、送信部10から出力される超音波は、紙葉類7で反射する反射波と、紙葉類7を透過する透過波とに分かれる。この場合、受信部30は、紙葉類7を透過する透過波を受信する。
【0061】
さらに、受信部30の超音波センサの検出範囲に紙葉類7と異物8とが存在する場合、送信部10から出力されて紙葉類7と異物8とを透過した透過波を受信する。超音波が異物を透過する場合、透過波の振幅は減少する。
【0062】
吸音部材40は、例えば、吸音部材20と同様の吸音素材により形成される。吸音部材40は、例えば、受信部30の振動面に入力する超音波を制限する。即ち、吸音部材40は、送信部10から出力される超音波の受信部30の振動面上における入力範囲を制限する。これにより、吸音部材40は、受信部30の振動面上の超音波が入射する範囲を制限することができる。
【0063】
さらに、吸音部材40の形状を調整することにより、受信部30の振動面上の超音波が入射する範囲の形状を自由に調整することが出来る。即ち、吸音部材40は、受信部30の超音波センサの検出範囲を自由に調整することが出来る。
【0064】
なお、送信部10は、搬送される紙葉類7の表面で反射する反射波の影響を受けないような角度で設置される。また、受信部30は、送信部10の設置角度に応じて調整されて設置される。
【0065】
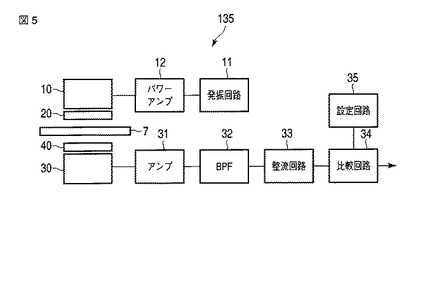
図5は、図4に示す異物検出装置135の制御系の構成例について説明するための説明図である。
【0066】
図5に示すように、異物検出装置135は、送信部10、発信回路11、パワーアンプ12、受信部30、アンプ31、バンドパスフィルタ(BPF)32、整流回路33、比較回路34、及び設定回路35を備える。さらに、異物検出装置135は、図示しない制御部を備える。
【0067】
制御部は、異物検出装置135の各部の動作の制御を司るものである。制御部は、CPU、バッファメモリ、プログラムメモリ、及び不揮発性メモリなどを備えている。
【0068】
CPUは、種々の演算処理を行う。バッファメモリは、CPUにより演算結果を一時的に記憶する。プログラムメモリ及び不揮発性メモリは、CPUが実行する種々のプログラム及び制御データなどを記憶する。
【0069】
制御部は、CPUによりプログラムメモリに記憶されているプログラムを実行することにより、種々の処理を行うことができる。例えば、制御部は、送信部10及び受信部30の動作タイミングを制御する。
【0070】
また、制御部は、図3に示す検査部116のCPU155及び主制御部151と接続されている。例えば、制御部は、処理結果を主制御部151またはCPU155に通知することができる。また、主制御部151またはCPU155から送信される制御信号に基づいて、異物検出装置135の動作を制御することが出来る。
【0071】
発振回路11は、例えば、300kHz乃至400kHzの交流電圧を生成する。発信回路131は、生成した交流電圧をパワーアンプ12に出力する。
【0072】
パワーアンプ12は、発振回路11から供給される交流電圧を増幅する。パワーアンプ12は、増幅した交流電圧を送信部10に出力する。
【0073】
送信部10は、パワーアンプから供給される交流電圧を超音波センサの圧電素子に印加する。これにより、送信部10は、超音波を出力する。
【0074】
上記したように、受信部30の超音波センサの検出範囲に紙葉類7が存在しない場合、送信部10から出力された超音波は、受信部30に直接入射する。また、受信部30の超音波センサの検出範囲に紙葉類7が存在する場合、送信部10から出力されて紙葉類7を透過した透過波が受信部30に入射する。
【0075】
受信部30は、入射した超音波に応じて電気信号を生成する。即ち、受信部30は、超音波の強度を示す信号(強度信号)を生成する。受信部30は、生成した強度信号をアンプ31に出力する。
【0076】
アンプ31は、受信部30から供給される強度信号を増幅する。アンプ31は、増幅した強度信号をバンドパスフィルタ32に出力する。
【0077】
バンドパスフィルタ32は、アンプ31から供給される強度信号の雑音成分を除去する。バンドパスフィルタ32は、雑音成分を除去した強度信号を整流回路33に出力する。
【0078】
整流回路33は、交流である強度信号を直流に変換する。整流回路33は、直流に変換した強度信号を比較回路34に出力する。
【0079】
比較回路34は、整流回路33から供給される強度信号と、予め設定回路35に設定される比較基準値と、を比較する。例えば、比較回路34は、整流回路33から供給される強度信号が設定回路35に設定されている比較基準値未満である場合に、紙葉類7に異物が貼付していることを示す検知信号を出力する。この場合、異物検出装置135の制御部は、図3に示すCPU155、または主制御部151に検知信号を出力する。
【0080】
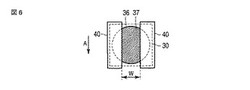
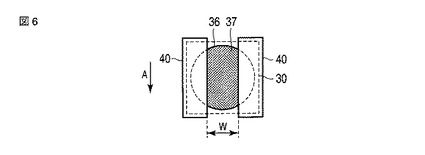
図6は、図4に示す異物検出装置135の受信部30及び吸音部材40の構成例について説明するための説明図である。
図6に示すように、受信部30は、超音波センサ36を備える。超音波センサ36は、超音波を受信する振動面37を備える。さらに、振動面37と搬送路115との間には、吸音部材40が設置される。
【0081】
吸音部材40は、紙葉類7の搬送方向Aと平行であり、且つ、振動面37の直径以上の長さを有する辺を持つ矩形状の部材である。例えば、吸音部材40は、図6に示すように、搬送方向Aと直交する方向(走査方向)における振動面37の端部を覆うように設置される。これにより、送信部10から出力される超音波は、振動面37のハッチングで示す範囲にのみ入射する。
【0082】
即ち、吸音部材40は、受信部30の超音波センサ36の振動面37の有効領域の走査方向における幅wを一定にするように保つように設置される。
【0083】
なお、吸音部材40は、紙葉類7の搬送方向Aと平行な辺が振動面37の直径以上の長さを有する矩形状の部材であるとして説明したが、この構成に限定されない。少なくとも、超音波センサ36の振動面37の端部を覆い、振動面37の走査方向における幅を一定にすることができる形状であれば如何なる形状であってもよい。
【0084】
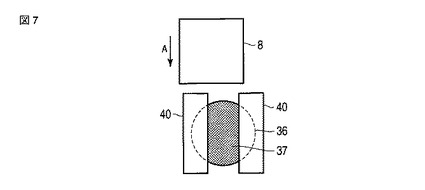
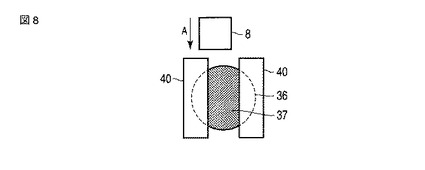
図7及び図8は、図6に示す受信部30により異物8を検出する例について説明するための説明図である。なお、図7は、搬送方向Aにおける長さが振動面37の直径と同じである異物8の例を示す。また、図8は、搬送方向Aにおける長さが振動面37の直径の半分である異物8の例を示す。
【0085】
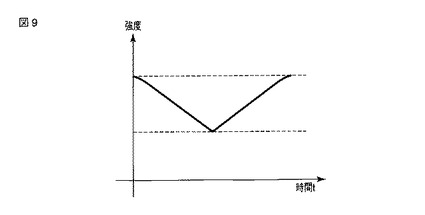
図9は、図7に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0086】
図9に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0087】
図7に示すように、振動面37の搬送方向Aにおける端部に異物8の端部が重なる箇所を除いて、振動面37の走査幅が一定である。この為、図9に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0088】
なお、異物8の搬送方向Aにおける長さは、振動面37と同じであると仮定した。この為、振動面37の搬送方向Aにおける端部に異物8が常に重なる。この為、振動面37の有効領域に入射する透過波が常に変化する。即ち、受信部30は、図9に示すように常に変化する信号を検出する。
【0089】
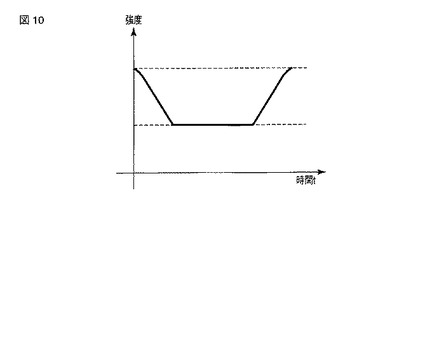
図10は、図8に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0090】
図10に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0091】
図8に示すように、振動面37の搬送方向Aにおける端部に異物8の端部が重なる箇所を除いて、振動面37の走査幅が一定である。この為、図10に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0092】
なお、異物8の搬送方向Aにおける長さは、振動面37の半分であると仮定した。この為、振動面37の搬送方向Aにおける端部に異物8が重ならない時間tが存在する。振動面37の搬送方向Aにおける端部に異物8が重なっていない場合、振動面37の有効領域に入射する透過波が変化しない為、受信部30は、図10に示すように一定レベルの信号を検出する。
【0093】
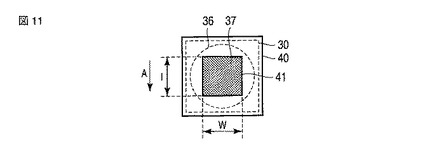
図11は、図4に示す異物検出装置135の受信部30及び吸音部材40の他の構成例について説明するための説明図である。
図11に示すように、受信部30は、超音波センサ36を備える。超音波センサ36は、超音波を受信する振動面37を備える。さらに、振動面37と搬送路115との間には、吸音部材40が設置される。
【0094】
吸音部材40は、各辺の長さが少なくとも振動面37の直径以上である矩形状の部材である。吸音部材40は、開口部41を有する。開口部41は、超音波センサ36の振動面37と重なる範囲内に矩形状で設けられる。この場合、送信部10から出力される超音波は、振動面37において開口部41と重なる範囲(有効領域)にのみ入射する。図11は、有効領域をハッチングで示している。
【0095】
即ち、吸音部材40は、受信部30の超音波センサ36の振動面37の有効領域の走査方向における幅wと、搬送方向Aにおける長さlと、を一定にするように保つように設置される。
【0096】
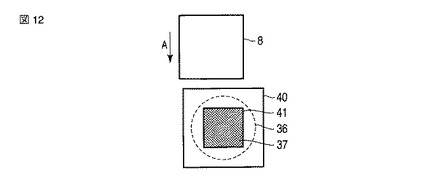
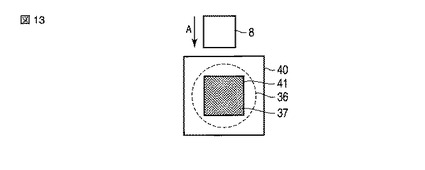
図12及び図13は、図11に示す受信部30により異物8を検出する例について説明するための説明図である。なお、図12は、搬送方向Aにおける長さが振動面37の直径と同じである異物8の例を示す。また、図13は、搬送方向Aにおける長さが振動面37の直径の半分である異物8の例を示す。
【0097】
図12に示すように、受信部30の振動面37の有効領域より大きな異物8が通過する場合、透過波の減衰が発生する時間の長さが減少する。しかし、減衰が最大となる時間が長くなる。この為、図12に示す例は、図7に示す例に比べて、異物8の検知により適した形状であると言える。
【0098】
また、図13に示すように、受信部30の振動面37の有効領域より小さな異物8が通過する場合、図8に示す例と比べてさらに透過波の強度の減衰量が顕著になる。また、減衰が最大となる時間が長くなる。この為、図13に示す例は、図8に示す例に比べて、異物8の検知により適した形状であると言える。
【0099】
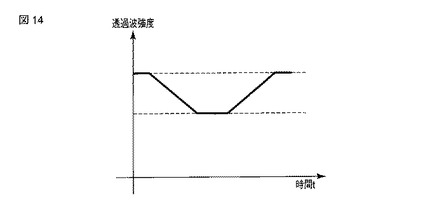
図14は、図12に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0100】
図14に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0101】
図12に示すように、振動面37の走査幅が一定である。この為、図14に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0102】
なお、異物8の搬送方向Aにおける長さは、振動面37の直径と同じであると仮定した。この為、矩形状の開口部41の搬送方向Aにおける長さは、異物8の搬送方向Aにおける長さより短い。この為、異物8の搬送方向Aにおける端部が開口部41の範囲内に無い時間tが存在する。異物8の搬送方向Aにおける端部が開口部41の範囲内に無い場合、振動面37の有効領域に入射する透過波が変化しない為、受信部30は、図14に示すように一定レベルの信号を検出する。
【0103】
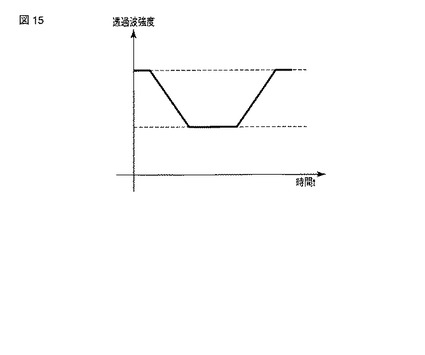
図15は、図13に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0104】
図15に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0105】
図13に示すように、振動面37の走査幅が一定である。この為、図15に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0106】
なお、異物8の搬送方向Aにおける長さは、振動面37の直径の半分であると仮定した。例えば、異物8の搬送方向Aにおける長さが開口部41の搬送方向Aにおける長さより短い場合、開口部41の搬送方向Aにおける端部に異物8が重ならない時間tが存在する。開口部41の搬送方向Aにおける端部に異物8が重ならない場合、振動面37の有効領域に入射する透過波が変化しない。この為、受信部30は、図15に示すように一定レベルの信号を検出する。
【0107】
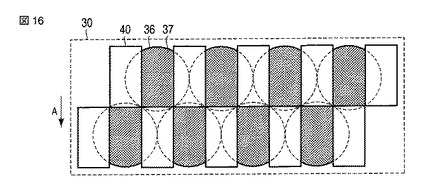
図16は、図4に示す異物検出装置135の受信部30及び吸音部材40のさらに他の構成例について説明するための説明図である。
【0108】
図16に示すように、受信部30は、複数の超音波センサ36を備える。さらに、受信部30は、複数の超音波センサ36の振動面37と搬送路115との間に設置される複数の吸音部材40を備える。
【0109】
各超音波センサ36は、2列交互に最密配置される。吸音部材40は、各超音波センサ36の走査範囲が、搬送方向A、及び走査方向において重複しないように設置される。尚且つ、吸音部材40は、各超音波センサ36の走査範囲間に不感域が存在しないように配置される。即ち、吸音部材40は、各振動面37の有効領域による走査範囲が走査方向において連続するように設けられる。
【0110】
上記したように、受信部30は、複数の超音波センサ36及び吸音部材40を備える超音波ラインセンサを備える。
【0111】
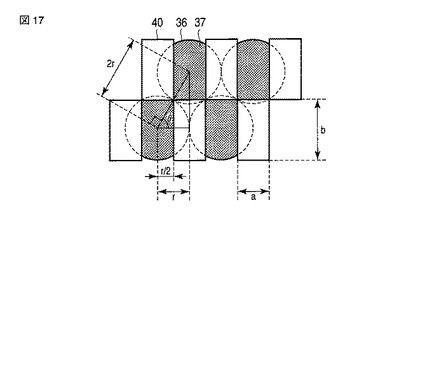
図17は、図16に示す異物検出装置135の受信部30及び吸音部材40の例について説明するための説明図である。
【0112】
図17に示すように、受信部30の複数の超音波センサ36は、最も密度の高い配置で設置される。即ち、受信部30の複数の超音波センサ36は、各超音波センサ36の振動面37の円周が隣り合う超音波センサ36の振動面37の円周と接するように設置される。
【0113】
例えば、超音波センサ36の振動面37の半径をrとし、吸音部材40の走査方向における幅をaとし、搬送方向あにおける長さをbとする場合、ある超音波センサ36の振動面37の中心と、搬送方向Aにおいて隣り合う振動面37の中心との距離が2rとなる。
【0114】
また、この場合、ある超音波センサ36の振動面37の中心と搬送方向Aにおいて隣り合う振動面37の中心とが成す線分と、走査方向と、が成す角θ=60°である。即ち、ある超音波センサ36の振動面37の中心から吸音部材40の端部までの走査方向における長さはr/2である。
【0115】
この結果、吸音部材40の走査方向における幅aは、振動面37の半径rと等しいことが導き出される。さらにこの場合、吸音部材40の搬送方向Aにおける長さbは、2r×sin60°であることを導き出すことが出来る。
【0116】
また、ある超音波センサ36の振動面37の中心と搬送方向Aにおいて隣り合う振動面37の中心との搬送方向Aにおける距離も同じく2r×sin60°であることを導き出すことが出来る。
【0117】
上記したように複数の超音波センサ36及び吸音部材を設置することにより、異物検出装置135は、より高い分解能で異物、及び重券を検出することができる。また、吸音部材40は、走査方向における振動面37の端部を覆うように設置される。この為、超音波検出に適さない走査方向における振動面37の端部が検知結果に影響を与えることを防ぐことができる。
【0118】
この結果、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することができる。
【0119】
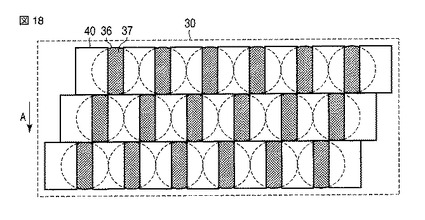
図18は、図4に示す異物検出装置135の受信部30及び吸音部材40のさらに他の構成例について説明するための説明図である。
【0120】
図18に示すように、受信部30は、複数の超音波センサ36を備える。さらに、受信部30は、複数の超音波センサ36の振動面37と搬送路115との間に設置される複数の吸音部材40を備える。
【0121】
各超音波センサ36は、3列交互に最密配置される。吸音部材40は、各超音波センサ36の走査範囲が、搬送方向A、及び走査方向において重複しないように設置される。尚且つ、吸音部材40は、各超音波センサ36の走査範囲間に不感域が存在しないように配置される。即ち、受信部30は、複数の超音波センサ36及び吸音部材40を備える超音波ラインセンサを備える。
【0122】
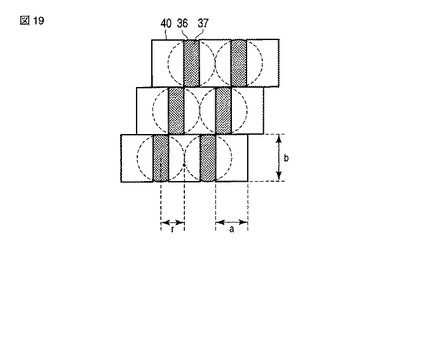
図19は、図18に示す異物検出装置135の受信部30及び吸音部材40の例について説明するための説明図である。
【0123】
図19に示すように、受信部30の複数の超音波センサ36及ぶ吸音部材40は、超音波センサ36が3列に配置される場合に振動面37の有効領域が最大となるように配置される。
【0124】
例えば、超音波センサ36の振動面37の半径をrとし、吸音部材40の走査方向における幅をaとし、搬送方向あにおける長さをbとする。
【0125】
この場合、感知範囲を最大にする為に、吸音部材40の走査方向における幅aは、4r/3で示すことが出来る。また、吸音部材40の搬送方向Aにおける長さbは、b=√{a2+(2r)2}で示すことが出来る。
【0126】
上記したように複数の超音波センサ36及び吸音部材40を3列交互に配置することにより、異物検出装置135は、さらに高い分解能で異物、及び重券を検出することができる。この結果、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することができる。
【0127】
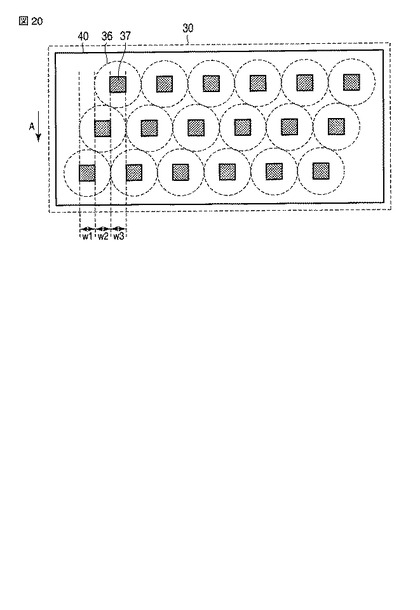
図20は、図4に示す異物検出装置135の受信部30及び吸音部材40のさらに他の構成例について説明するための説明図である。
【0128】
図20に示すように、受信部30は、複数の超音波センサ36を備える。さらに、受信部30は、複数の超音波センサ36の振動面37と搬送路115との間に設置される複数の吸音部材40を備える。
【0129】
各超音波センサ36は、3列交互に最密配置される。吸音部材40は、全ての超音波センサ36の振動面37を覆う事ができる形状で設けられている。さらに、吸音部材40は、各振動面37に対応する位置に開口部41を備える。各開口部41は、各振動面37と重なる範囲内に矩形状で設けられる。この場合、送信部10から出力される超音波は、各振動面37において各開口部41と重なる範囲(有効領域)にのみ入射する。図20は、有効領域をハッチングで示している。
【0130】
即ち、吸音部材40の各開口部41は、各振動面37の有効領域の走査方向における幅wと、搬送方向Aにおける長さlと、を一定にするように保つように設置される。尚且つ、吸音部材40の各開口部41は、各超音波センサ36の走査範囲間に不感域が存在しないように配置される
また、吸音部材40の各開口部41は、各振動面37の有効領域の走査範囲が走査方向において重複しないように設置される。即ち、搬送方向Aに3列に配列された超音波センサ36の振動面37の有効領域は、図20に走査範囲w1、w2、及びw3として示すように、それぞれ異なる範囲を走査する。
【0131】
上記したように複数の超音波センサ36、吸音部材40の開口部41を設置することにより、異物検出装置135は、受信部30(超音波ラインセンサ)の搬送方向Aにおける分解能を高める事ができる。また、振動面37の有効領域は、搬送方向Aにおいて長大になることを回避することができる。
【0132】
さらに、各開口部41の設置位置の間隔が搬送方向Aにおいて短くなるように調整することにより、各超音波センサ36の検知位置が搬送方向Aに大きくずれることを防ぐことができる。
【0133】
この結果、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することができる。
【0134】
なお、上記した実施形態では、異物検出装置135は、紙葉類7に付着する異物8を検出する構成として説明したが、この構成に限定されない。異物検出装置135は、設定回路35の比較基準値を調整することにより、紙葉類7の重なり(重券)も同様に検出することが出来る。
【0135】
また、上記した実施形態では、超音波センサ36を複数配列してラインセンサを構成する場合、各超音波センサ36の走査範囲が、搬送方向A、及び走査方向において重複しないように吸音部材40を設置するとして説明したがこの構成に限定されない。検知結果に影響を与えない範囲であれば、各超音波センサ36の走査範囲が重複する構成であってもよい。
【0136】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0137】
7…紙葉類、8…異物、10…送信部、11…発信回路、12…パワーアンプ、20…吸音部材、30…受信部、31…アンプ、32…バンドパスフィルタ、33…整流回路、34…比較回路、35…設定回路、36…超音波センサ、37…振動面、40…吸音部材、41…開口部、100…紙葉類処理装置、112…投入部、113…取出部、114…吸着ローラ、115…搬送路、116…検査部、117…画像読取装置、 118…画像読取装置、119…厚み検査部、125…ゲート、126…排除搬送路、127…排除集積部、132…集積・結束部、133…裁断部、134…スタッカ、135…異物検出装置、151…主制御部、151a…記憶部、152…搬送制御部、153…集積・結束制御部、155…CPU、156…裁断制御部、
【技術分野】
【0001】
本発明の実施形態は、超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置に関する。
【背景技術】
【0002】
従来、例えば紙幣などの紙葉類の計数及び判別を行う紙葉類処理装置(紙幣処理装置)が実用化されている。紙葉類処理装置は、投入部に投入された紙葉類を1枚ずつ取り込み、紙葉類の検査装置に搬送する。検査装置は、紙葉類に対して種々の処理を行い紙葉類の状態を判別する。例えば、紙葉類処理装置は、検査装置の検査結果に基づいて、紙葉類の種類判定、及び真偽判定などを行う。
【0003】
また、紙葉類処理装置は、例えばテープなどの異物が貼付された紙葉類を再流通に適さない紙葉類であると判断する。紙葉類処理装置は、例えばテープなどの異物が貼付された紙葉類を再流通に適さない紙葉類であると判断する。さらに、紙葉類処理装置は、2枚以上重なっている紙葉類(重券)を検知する。紙葉類処理装置は、検知した重券を排除する。
【0004】
例えば、検査装置は、紙葉類に超音波を照射し、透過波、または反射波を検出することにより、紙葉類に貼付されているテープなどの異物の有無を検出する。さらに、検査装置は、紙葉類に超音波を照射し、透過波を検出することにより、紙葉類の重なりを検出する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−351141号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記した検査装置に用いられる超音波センサを備える送信器は、圧電素子に信号を入力し、圧電素子に接して設置される振動面を振動させる。これにより、送信器は、信号に応じた波を空気中に出力する。
【0007】
また、検査装置に用いられる超音波センサを備える受信器は、圧電素子に接して設置される振動面の振動に応じて変形する圧電素子により生成される電気信号を検出信号として得る。
【0008】
超音波センサの形状は、駆動原理の為に円状に限定される。しかし、紙葉類に付着する異物は、搬送方向と平行に直線状の軌跡を描いて移動する。この為、異物の位置と超音波センサの位置とによっては、検査装置は、高い精度で超音波を検出することができない可能性がある。
【0009】
そこで、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
一実施形態に係る超音波ラインセンサは、振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、前記各超音波センサの振動面と検出対象との間に設けられ、超音波を遮断する吸音部材と、を具備し、前記吸音部材は、前記検出対象の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記検出対象の搬送方向と平行な2辺を持つように設けられる。
【図面の簡単な説明】
【0011】
【図1】図1は、一実施形態に係る紙葉類処理装置の外観について説明するための説明図である。
【図2】図2は、図1に示す紙葉類処理装置の構成例について説明するための説明図である。
【図3】図3は、図1及び図2に示す紙葉類処理装置の制御系の構成例について説明するための説明図である。
【図4】図4は、図2及び図3に示す異物検出装置の構成例について説明するための説明図である。
【図5】図5は、図4に示す異物検出装置の制御系の構成例について説明するための説明図である。
【図6】図6は、図4に示す異物検出装置の受信部及び吸音部材の構成例について説明するための説明図である。
【図7】図7は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図8】図8は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図9】図9は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図10】図10は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図11】図11は、図4に示す異物検出装置の受信部及び吸音部材の他の構成例について説明するための説明図である。
【図12】図12は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図13】図13は、図4に示す異物検出装置により異物を検出する例について説明するための説明図である。
【図14】図14は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図15】図15は、図4に示す異物検出装置により検出する信号の例について説明するための説明図である。
【図16】図16は、図4に示す異物検出装置の受信部及び吸音部材のさらに他の構成例について説明するための説明図である。
【図17】図17は、図16に示す異物検出装置の受信部及び吸音部材の例について説明するための説明図である。
【図18】図18は、図4に示す異物検出装置の受信部及び吸音部材のさらに他の構成例について説明するための説明図である。
【図19】図19は、図18に示す異物検出装置の受信部及び吸音部材の例について説明するための説明図である。
【図20】図20は、図4に示す異物検出装置の受信部及び吸音部材のさらに他の構成例について説明するための説明図である。
【発明を実施するための形態】
【0012】
以下、図面を参照しながら、一実施形態に係る超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置について詳細に説明する。
【0013】
図1は、一実施形態に係る紙葉類処理装置(紙幣処理装置)100の外観について説明するための説明図である。
図1に示すように、紙葉類処理装置100は、装置外部に、投入部112、操作部136、操作表示部137、ドア138、取出口139、及びキーボード140を備えている。
【0014】
投入部112は、例えば紙幣などの紙葉類7を投入するための構成である。投入部112は、重ねられた状態の紙葉類7をまとめて受け入れる。操作部136は、オペレータによる各種操作入力を受け付ける。操作表示部137は、オペレータに対して各種の操作案内、及び処理結果などを表示する。なお、操作表示部137は、タッチパネルとして構成されていてもよい。この場合、紙葉類処理装置100は、操作表示部137に表示されるボタンと、操作表示部137に対するオペレータによる操作と、に基づいて、各種の操作入力を検知する。
【0015】
ドア138は、投入部112の投入口を開閉する為のドアである。取出口139は、紙葉類処理装置100により再流通不可と判断された紙葉類7がスタックされる集積部から紙葉類7を取り出す為の構成である。キーボード140は、オペレータによる各種操作入力を受け付ける入力部として機能する。
【0016】
図2は、図1に示す紙葉類処理装置100の構成例について説明するための説明図である。
紙葉類処理装置100は、装置内部に、投入部112、取出部113、吸着ローラ114、搬送路115、検査部116、ゲート120乃至125、排除搬送路126、排除集積部127、集積・結束部128乃至131、裁断部133、及びスタッカ134を備える。また、紙葉類処理装置100は、主制御部151を備える。主制御部151は、紙葉類処理装置100の各部の動作を統合的に制御する。
【0017】
取出部113は、例えば投入部112の上部に設けられる。取出部113は、吸着ローラ114を備えている。吸着ローラ114は、投入部112にセットされた紙葉類7を集積方向の上端に接するように設けられている。即ち、吸着ローラ114は、回転することにより、投入部112にセットされた紙葉類7を集積方向の上端から1枚ずつ装置内部に取り込む。
【0018】
吸着ローラ114は、たとえば、1回転するごとに1枚の紙葉類7を取出すように機能する。これにより、吸着ローラ114は、紙葉類7を一定のピッチで取出す。吸着ローラ114により取り込まれた紙葉類7は、搬送路115に導入される。
【0019】
なお、投入部112、取出部113、及び吸着ローラ114は、上記した構成に限定されない。投入部112、取出部113、及び吸着ローラ114は、紙葉類7を1枚ずつ紙葉類処理装置100内に取り込む構成であれば、如何なる構成であってもよい。
【0020】
搬送路115は、紙葉類7を紙葉類処理装置100内の各部に搬送する搬送手段である。搬送路115は、図示しない搬送ベルト及び駆動プーリなどを備えている。搬送路115は、図示しない駆動モータ及び駆動プーリにより搬送ベルトを動作させる。搬送路115は、吸着ローラ114により取り込まれた紙葉類7を搬送ベルトにより一定速度で搬送する。なお、搬送路115における取出部113に近い側を上流側、スタッカ134に近い側を下流側として説明する。
【0021】
取出部113から延びた搬送路115上には、検査部116が設けられている。検査部116は、画像読取装置117、画像読取装置118、異物検出装置135、及び厚み検査部119などを備える。検査部116は、紙葉類7の光学的特徴情報、機械的特徴、及び磁気的特長情報を検出する。これにより、紙葉類処理装置100は、紙葉類7の種類、汚棄損、表裏、及び真偽などを検査する。
【0022】
画像読取装置117、及び118は、それぞれ搬送路115を挟んで対面するように設けられている。画像読取装置117、及び118は、搬送路115を搬送される紙葉類7の両面の画像を読み取る。画像読取装置117、及び118は、それぞれ、Charge Coupled Device(CCD)カメラを備える。紙葉類処理装置100は、画像読取装置117、及び118により撮像した画像に基づいて、紙葉類7の表面及び裏面の模様画像を取得する。
【0023】
画像読取装置117、及び118は、読み取った画像を検査部116内の図示しないメモリに一時的に記憶する。紙葉類処理装置100は、このメモリに記憶されている画像を操作入力に応じて操作表示部137に表示する。
【0024】
異物検出装置135は、搬送される紙葉類7に対して超音波を照射し、紙葉類7を透過する透過波を検出する。これにより、異物検出装置135は、例えば、紙葉類7に付着する異物の有無を検出する。異物検出装置135は、例えば、テープなどの貼付物を異物として検出する。また、異物検出装置135は、例えば、紙葉類7の重なり(重券)を検出する。
【0025】
厚み検査部119は、搬送路115を搬送される紙葉類7の厚みを検査する。例えば、検出した厚みが規定値以上である場合、紙葉類処理装置100は、紙葉類7の2枚取りを検出する。
【0026】
また、検査部116は、図示しない磁気センサなどを備えている。磁気センサは、紙葉類7の磁気的な特徴情報を検出する。
【0027】
主制御部151は、画像読取装置117、118、異物検出装置135、厚み検査部119、及び磁気センサなどによる検出結果に基づいて、紙葉類7が正券、損券、または排除権であるかを判定する。
【0028】
紙葉類処理装置100は、正券と判定した紙葉類7を集積・結束部128乃至131に搬送する。また、紙葉類処理装置100は、損券と判定した紙葉類7を裁断部133に搬送する。裁断部133は、搬送される損券を裁断する。なお、紙葉類処理装置100は、損券をスタッカ134に搬送し集積してもよい。スタッカ134は、集積した損券が例えば100枚に到達するごとに損券を施封する。
【0029】
排除券は、正券及び損券に該当しない紙葉類7である。紙葉類処理装置100は、排除券と判定した紙葉類7を排除集積部127に搬送する。排除券は、例えば、2枚取り券などの搬送異常券、折れまたは破れなどが存在する不良券、及び適用外券種または偽券などの判別不能券を含む。
【0030】
検査部116の下流側の搬送路115上には、ゲート120乃至125が順に配設されている。ゲート120乃至125は、それぞれ、主制御部151により制御される。主制御部151は、検査部116による検査の結果に基づいて各ゲート120乃至125の動作を制御する。これにより、主制御部151は、搬送路115を搬送されている紙葉類7を所定の処理部に搬送するように制御する。
【0031】
検査部116の直後に配設されたゲート120は、搬送路115を排除搬送路126に分岐する。即ち、ゲート120は、検査部116による検査の結果、真券ではないと判定された排除券、または、検査部116による検査を行うことができない検査不能券等を排除搬送路126に搬送するように切り替えられる。
【0032】
排除搬送路126の終端部には、排除集積部(排除部)127が設けられている。排除集積部127は、取出部113にて取出した姿勢のまま、上記したような排除券、及び検査不能券を集積する。排除集積部127に集積された紙葉類7は、取出口139から取り出すことができる。
【0033】
また、ゲート121乃至124により分岐される先には、集積・結束部128乃至131(総じて集積結束部132と称する)がそれぞれ設けられている。集積・結束部132には、再流通可能であると判定された紙葉類7が種類及び表裏毎に区別されて集積される。集積・結束部132は、集積した紙葉類7を所定枚数毎に結束して格納する。また、紙葉類処理装置100は、図示しない大束結束部により、所定枚数毎で結束した紙葉類7を複数集積し、結束する。
【0034】
ゲート125により分岐される搬送路115の先には、裁断部133が配設されている。裁断部133は、紙葉類7を裁断して収納する。ゲート125に搬送される紙葉類7は、正規の紙葉類7であり、且つ、再流通が不可能であると判定された紙葉類7(損券)である。
【0035】
また、ゲート125により分岐される他方の搬送路115の先には、スタッカ134が配設されている。主制御部151は、損券裁断モードが選択されている場合、紙葉類7を裁断部133に搬送するようにゲート125を制御する。また、主制御部151は、損券裁断モードが選択されていない場合、紙葉類7をスタッカ134に搬送するようにゲート125を制御する。
【0036】
なお、主制御部151は、集積・結束部132に集積された紙葉類7の枚数、及び、裁断部133により裁断された紙葉類7の枚数及び識別情報を逐次記憶する。
【0037】
図3は、図1及び図2に示す紙葉類処理装置100の制御系の構成例について説明するためのブロック図である。
【0038】
紙葉類処理装置100は、主制御部151、検査部116、搬送制御部152、集積・結束制御部153、裁断制御部156、操作表示部137、及びキーボード140などを備える。
【0039】
主制御部151は、紙葉類処理装置100の全体的な制御を司る。主制御部151は、操作表示部137により入力される操作、及び検査部116による検査結果に基づき、搬送制御部152及び集積・結束制御部153を制御する。
【0040】
例えば、操作員は、操作表示部137またはキーボード140により、処理する紙葉類7の券種、枚数、正損判別レベル、供給元の名称、及び処理方法などを入力する。
【0041】
検査部116は、画像読取装置117、及び118、厚み検査部119、異物検出装置135、その他のセンサ類154、及びCPU155を備える。
【0042】
画像読取装置117、及び118は、搬送路115を搬送される紙葉類7の両面の画像を読み取る。画像読取装置117、及び118は、例えばCCDなどの受光素子と光学系とを備える。画像読取装置117、及び118は、搬送される紙葉類7に対して光を投光し、反射光または透過光を光学系により受光する。画像読取装置117、及び118は、光学系により受光した光をCCDに結像させ、電気信号(画像)を取得する。
【0043】
主制御部151は、紙葉類7の基準となる画像(基準画像)を記憶部151aに予め記憶する。主制御部151は、紙葉類7から取得した画像と、記憶部151aに記憶される基準画像とを比較することにより、静養類の正損判定及び偽券判定を行う。
【0044】
異物検出装置135は、上記したように、搬送される紙葉類7に対して超音波を照射する。異物検出装置135は、紙葉類7を透過する音波を検出する。また、異物検出装置135は、予め設定される基準値を記憶する。
【0045】
紙葉類7に異物が付着している場合、紙葉類7を透過する超音波(透過波)の強度が減衰する。異物検出装置135は、検出した透過波の強度(透過波強度)と予め記憶される基準値とを比較する。異物検出装置135は、比較結果に基づいて、紙葉類7に異物が付着しているか否かを判定する。
【0046】
厚み検査部119は、搬送路115を搬送される紙葉類7の厚みを検査する。その他のセンサ類154は、例えば、磁気センサなどである。磁気センサは、搬送路115を搬送される紙葉類7から磁気的な特徴情報を検出する。
【0047】
CPU155は、画像読取装置117、118、厚み検査部119、異物検出装置135、及びその他のセンサ類154などによる検査の結果に基づいて、搬送路115を搬送される紙葉類7の種類、正損、表裏、及び真偽などを判別する。
【0048】
搬送制御部152は、主制御部151の制御に基づき、取出部113、搬送路115、排除搬送路126、及びゲート120乃至125を制御する。これにより、搬送制御部152は、紙葉類7の取り込み及び搬送を制御する。また、搬送制御部152は、判定した紙葉類7の種類毎に区分する区分処理を行う。即ち、搬送制御部152は、区分処理部として機能する。
【0049】
例えば、搬送制御部152は、異物検出装置135により紙葉類7に異物が付着していることを検出する場合、紙葉類7を排除集積部127、裁断部133、またはスタッカ134に搬送するようにゲート120乃至125を制御する。
【0050】
集積・結束制御部153は、主制御部151の制御に基づき、排除集積部127及び集積・結束部128乃至131を制御する。これにより、集積・結束制御部153は、紙葉類7の集積、及び結束の制御を行なう。
【0051】
裁断制御部156は、主制御部151の制御に基づき、裁断部133の動作を制御する。これにより、裁断部133は、搬送される紙葉類7の裁断を行う。
【0052】
図4は、図2及び図3に示す異物検出装置135の構成例について説明するための説明図である。
紙葉類7は、例えば、図示しない搬送ベルトなどにより狭持されて図4に示す矢印Aの方向に搬送される。異物検出装置135は、紙葉類7に付着している例えばテープ、または紙片などの異物8を検出対象として検出処理を行う。これにより、異物検出装置135は、紙葉類7に付着する異物8の有無を検出する。異物検出装置135は、例えば紙葉類処理装置100の搬送路115の近傍に設置される。
【0053】
図4に示すように、異物検出装置135は、送信部10及び受信部30を備える。また、送信部10は、送信部10の振動面に設置される吸音部材20を備える。さらに、受信部30は、受信部30の振動面に設置される吸音部材40を備える。
【0054】
送信部10は、超音波センサを備える。超音波センサは、搬送方向Aに一定の速度で搬送される紙葉類7に対して超音波を照射する。超音波センサは、圧電素子と振動面とを有する。送信部10は、超音波センサの圧電素子に電圧を印加することにより、圧電体の形状を変化させる。
【0055】
送信部10は、例えば、圧電素子にパルス信号を印加することにより、圧電素子の形状を周期的に変化させる。これにより、送信部10は、振動面が振動させることができる。この結果、送信部10は、パルス信号の周期に応じた超音波を空気中に出力することができる。
【0056】
吸音部材20は、例えば、波動を吸収する素材により形成される。吸音部材20は、例えば、送信部10から出力される超音波の出力範囲を制限する。これにより、送信部10は、搬送路115を搬送される紙葉類7の所定の範囲に超音波を入力することができる。
【0057】
受信部30は、送信部10と同様の超音波センサを備える。超音波センサは、圧電素子と振動面とを有する。受信部30の超音波センサは、圧電素子の形状の変化に応じて電気信号を生成する。
【0058】
受信部30の振動面に超音波が入力される場合、振動面は、入力される超音波に応じて振動する。振動面が振動する場合、受信部30の圧電素子は、入力される超音波に応じて形状を変化させる。この結果、受信部30は、超音波の周期及び強度に応じた電気信号を生成することができる。
【0059】
受信部30は、受信部30の超音波センサの振動面が送信部10の超音波センサの振動面と対向するように設置される。即ち、受信部30の超音波センサの検出範囲に紙葉類7が存在しない場合、受信部30は、送信部10から出力された超音波を直接受信する。
【0060】
また、受信部30の超音波センサの検出範囲に紙葉類7が存在する場合、送信部10から出力される超音波は、紙葉類7で反射する反射波と、紙葉類7を透過する透過波とに分かれる。この場合、受信部30は、紙葉類7を透過する透過波を受信する。
【0061】
さらに、受信部30の超音波センサの検出範囲に紙葉類7と異物8とが存在する場合、送信部10から出力されて紙葉類7と異物8とを透過した透過波を受信する。超音波が異物を透過する場合、透過波の振幅は減少する。
【0062】
吸音部材40は、例えば、吸音部材20と同様の吸音素材により形成される。吸音部材40は、例えば、受信部30の振動面に入力する超音波を制限する。即ち、吸音部材40は、送信部10から出力される超音波の受信部30の振動面上における入力範囲を制限する。これにより、吸音部材40は、受信部30の振動面上の超音波が入射する範囲を制限することができる。
【0063】
さらに、吸音部材40の形状を調整することにより、受信部30の振動面上の超音波が入射する範囲の形状を自由に調整することが出来る。即ち、吸音部材40は、受信部30の超音波センサの検出範囲を自由に調整することが出来る。
【0064】
なお、送信部10は、搬送される紙葉類7の表面で反射する反射波の影響を受けないような角度で設置される。また、受信部30は、送信部10の設置角度に応じて調整されて設置される。
【0065】
図5は、図4に示す異物検出装置135の制御系の構成例について説明するための説明図である。
【0066】
図5に示すように、異物検出装置135は、送信部10、発信回路11、パワーアンプ12、受信部30、アンプ31、バンドパスフィルタ(BPF)32、整流回路33、比較回路34、及び設定回路35を備える。さらに、異物検出装置135は、図示しない制御部を備える。
【0067】
制御部は、異物検出装置135の各部の動作の制御を司るものである。制御部は、CPU、バッファメモリ、プログラムメモリ、及び不揮発性メモリなどを備えている。
【0068】
CPUは、種々の演算処理を行う。バッファメモリは、CPUにより演算結果を一時的に記憶する。プログラムメモリ及び不揮発性メモリは、CPUが実行する種々のプログラム及び制御データなどを記憶する。
【0069】
制御部は、CPUによりプログラムメモリに記憶されているプログラムを実行することにより、種々の処理を行うことができる。例えば、制御部は、送信部10及び受信部30の動作タイミングを制御する。
【0070】
また、制御部は、図3に示す検査部116のCPU155及び主制御部151と接続されている。例えば、制御部は、処理結果を主制御部151またはCPU155に通知することができる。また、主制御部151またはCPU155から送信される制御信号に基づいて、異物検出装置135の動作を制御することが出来る。
【0071】
発振回路11は、例えば、300kHz乃至400kHzの交流電圧を生成する。発信回路131は、生成した交流電圧をパワーアンプ12に出力する。
【0072】
パワーアンプ12は、発振回路11から供給される交流電圧を増幅する。パワーアンプ12は、増幅した交流電圧を送信部10に出力する。
【0073】
送信部10は、パワーアンプから供給される交流電圧を超音波センサの圧電素子に印加する。これにより、送信部10は、超音波を出力する。
【0074】
上記したように、受信部30の超音波センサの検出範囲に紙葉類7が存在しない場合、送信部10から出力された超音波は、受信部30に直接入射する。また、受信部30の超音波センサの検出範囲に紙葉類7が存在する場合、送信部10から出力されて紙葉類7を透過した透過波が受信部30に入射する。
【0075】
受信部30は、入射した超音波に応じて電気信号を生成する。即ち、受信部30は、超音波の強度を示す信号(強度信号)を生成する。受信部30は、生成した強度信号をアンプ31に出力する。
【0076】
アンプ31は、受信部30から供給される強度信号を増幅する。アンプ31は、増幅した強度信号をバンドパスフィルタ32に出力する。
【0077】
バンドパスフィルタ32は、アンプ31から供給される強度信号の雑音成分を除去する。バンドパスフィルタ32は、雑音成分を除去した強度信号を整流回路33に出力する。
【0078】
整流回路33は、交流である強度信号を直流に変換する。整流回路33は、直流に変換した強度信号を比較回路34に出力する。
【0079】
比較回路34は、整流回路33から供給される強度信号と、予め設定回路35に設定される比較基準値と、を比較する。例えば、比較回路34は、整流回路33から供給される強度信号が設定回路35に設定されている比較基準値未満である場合に、紙葉類7に異物が貼付していることを示す検知信号を出力する。この場合、異物検出装置135の制御部は、図3に示すCPU155、または主制御部151に検知信号を出力する。
【0080】
図6は、図4に示す異物検出装置135の受信部30及び吸音部材40の構成例について説明するための説明図である。
図6に示すように、受信部30は、超音波センサ36を備える。超音波センサ36は、超音波を受信する振動面37を備える。さらに、振動面37と搬送路115との間には、吸音部材40が設置される。
【0081】
吸音部材40は、紙葉類7の搬送方向Aと平行であり、且つ、振動面37の直径以上の長さを有する辺を持つ矩形状の部材である。例えば、吸音部材40は、図6に示すように、搬送方向Aと直交する方向(走査方向)における振動面37の端部を覆うように設置される。これにより、送信部10から出力される超音波は、振動面37のハッチングで示す範囲にのみ入射する。
【0082】
即ち、吸音部材40は、受信部30の超音波センサ36の振動面37の有効領域の走査方向における幅wを一定にするように保つように設置される。
【0083】
なお、吸音部材40は、紙葉類7の搬送方向Aと平行な辺が振動面37の直径以上の長さを有する矩形状の部材であるとして説明したが、この構成に限定されない。少なくとも、超音波センサ36の振動面37の端部を覆い、振動面37の走査方向における幅を一定にすることができる形状であれば如何なる形状であってもよい。
【0084】
図7及び図8は、図6に示す受信部30により異物8を検出する例について説明するための説明図である。なお、図7は、搬送方向Aにおける長さが振動面37の直径と同じである異物8の例を示す。また、図8は、搬送方向Aにおける長さが振動面37の直径の半分である異物8の例を示す。
【0085】
図9は、図7に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0086】
図9に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0087】
図7に示すように、振動面37の搬送方向Aにおける端部に異物8の端部が重なる箇所を除いて、振動面37の走査幅が一定である。この為、図9に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0088】
なお、異物8の搬送方向Aにおける長さは、振動面37と同じであると仮定した。この為、振動面37の搬送方向Aにおける端部に異物8が常に重なる。この為、振動面37の有効領域に入射する透過波が常に変化する。即ち、受信部30は、図9に示すように常に変化する信号を検出する。
【0089】
図10は、図8に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0090】
図10に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0091】
図8に示すように、振動面37の搬送方向Aにおける端部に異物8の端部が重なる箇所を除いて、振動面37の走査幅が一定である。この為、図10に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0092】
なお、異物8の搬送方向Aにおける長さは、振動面37の半分であると仮定した。この為、振動面37の搬送方向Aにおける端部に異物8が重ならない時間tが存在する。振動面37の搬送方向Aにおける端部に異物8が重なっていない場合、振動面37の有効領域に入射する透過波が変化しない為、受信部30は、図10に示すように一定レベルの信号を検出する。
【0093】
図11は、図4に示す異物検出装置135の受信部30及び吸音部材40の他の構成例について説明するための説明図である。
図11に示すように、受信部30は、超音波センサ36を備える。超音波センサ36は、超音波を受信する振動面37を備える。さらに、振動面37と搬送路115との間には、吸音部材40が設置される。
【0094】
吸音部材40は、各辺の長さが少なくとも振動面37の直径以上である矩形状の部材である。吸音部材40は、開口部41を有する。開口部41は、超音波センサ36の振動面37と重なる範囲内に矩形状で設けられる。この場合、送信部10から出力される超音波は、振動面37において開口部41と重なる範囲(有効領域)にのみ入射する。図11は、有効領域をハッチングで示している。
【0095】
即ち、吸音部材40は、受信部30の超音波センサ36の振動面37の有効領域の走査方向における幅wと、搬送方向Aにおける長さlと、を一定にするように保つように設置される。
【0096】
図12及び図13は、図11に示す受信部30により異物8を検出する例について説明するための説明図である。なお、図12は、搬送方向Aにおける長さが振動面37の直径と同じである異物8の例を示す。また、図13は、搬送方向Aにおける長さが振動面37の直径の半分である異物8の例を示す。
【0097】
図12に示すように、受信部30の振動面37の有効領域より大きな異物8が通過する場合、透過波の減衰が発生する時間の長さが減少する。しかし、減衰が最大となる時間が長くなる。この為、図12に示す例は、図7に示す例に比べて、異物8の検知により適した形状であると言える。
【0098】
また、図13に示すように、受信部30の振動面37の有効領域より小さな異物8が通過する場合、図8に示す例と比べてさらに透過波の強度の減衰量が顕著になる。また、減衰が最大となる時間が長くなる。この為、図13に示す例は、図8に示す例に比べて、異物8の検知により適した形状であると言える。
【0099】
図14は、図12に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0100】
図14に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0101】
図12に示すように、振動面37の走査幅が一定である。この為、図14に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0102】
なお、異物8の搬送方向Aにおける長さは、振動面37の直径と同じであると仮定した。この為、矩形状の開口部41の搬送方向Aにおける長さは、異物8の搬送方向Aにおける長さより短い。この為、異物8の搬送方向Aにおける端部が開口部41の範囲内に無い時間tが存在する。異物8の搬送方向Aにおける端部が開口部41の範囲内に無い場合、振動面37の有効領域に入射する透過波が変化しない為、受信部30は、図14に示すように一定レベルの信号を検出する。
【0103】
図15は、図13に示す例において、受信部30により検出する信号の例について説明するための説明図である。
【0104】
図15に示すグラフは、縦軸が受信部30の超音波センサ36により検出する超音波の強度(センサ出力)を示し、横軸が経過時間tを示す。なお、紙葉類7は、搬送方向Aに一定の速度で搬送される為、横軸は、紙葉類7または異物8の搬送距離(位置)と置き換えてもよい。
【0105】
図13に示すように、振動面37の走査幅が一定である。この為、図15に示すように、受信部30は、異物8の位置と直線的な関係で変化する透過波の強度を検出することができる。
【0106】
なお、異物8の搬送方向Aにおける長さは、振動面37の直径の半分であると仮定した。例えば、異物8の搬送方向Aにおける長さが開口部41の搬送方向Aにおける長さより短い場合、開口部41の搬送方向Aにおける端部に異物8が重ならない時間tが存在する。開口部41の搬送方向Aにおける端部に異物8が重ならない場合、振動面37の有効領域に入射する透過波が変化しない。この為、受信部30は、図15に示すように一定レベルの信号を検出する。
【0107】
図16は、図4に示す異物検出装置135の受信部30及び吸音部材40のさらに他の構成例について説明するための説明図である。
【0108】
図16に示すように、受信部30は、複数の超音波センサ36を備える。さらに、受信部30は、複数の超音波センサ36の振動面37と搬送路115との間に設置される複数の吸音部材40を備える。
【0109】
各超音波センサ36は、2列交互に最密配置される。吸音部材40は、各超音波センサ36の走査範囲が、搬送方向A、及び走査方向において重複しないように設置される。尚且つ、吸音部材40は、各超音波センサ36の走査範囲間に不感域が存在しないように配置される。即ち、吸音部材40は、各振動面37の有効領域による走査範囲が走査方向において連続するように設けられる。
【0110】
上記したように、受信部30は、複数の超音波センサ36及び吸音部材40を備える超音波ラインセンサを備える。
【0111】
図17は、図16に示す異物検出装置135の受信部30及び吸音部材40の例について説明するための説明図である。
【0112】
図17に示すように、受信部30の複数の超音波センサ36は、最も密度の高い配置で設置される。即ち、受信部30の複数の超音波センサ36は、各超音波センサ36の振動面37の円周が隣り合う超音波センサ36の振動面37の円周と接するように設置される。
【0113】
例えば、超音波センサ36の振動面37の半径をrとし、吸音部材40の走査方向における幅をaとし、搬送方向あにおける長さをbとする場合、ある超音波センサ36の振動面37の中心と、搬送方向Aにおいて隣り合う振動面37の中心との距離が2rとなる。
【0114】
また、この場合、ある超音波センサ36の振動面37の中心と搬送方向Aにおいて隣り合う振動面37の中心とが成す線分と、走査方向と、が成す角θ=60°である。即ち、ある超音波センサ36の振動面37の中心から吸音部材40の端部までの走査方向における長さはr/2である。
【0115】
この結果、吸音部材40の走査方向における幅aは、振動面37の半径rと等しいことが導き出される。さらにこの場合、吸音部材40の搬送方向Aにおける長さbは、2r×sin60°であることを導き出すことが出来る。
【0116】
また、ある超音波センサ36の振動面37の中心と搬送方向Aにおいて隣り合う振動面37の中心との搬送方向Aにおける距離も同じく2r×sin60°であることを導き出すことが出来る。
【0117】
上記したように複数の超音波センサ36及び吸音部材を設置することにより、異物検出装置135は、より高い分解能で異物、及び重券を検出することができる。また、吸音部材40は、走査方向における振動面37の端部を覆うように設置される。この為、超音波検出に適さない走査方向における振動面37の端部が検知結果に影響を与えることを防ぐことができる。
【0118】
この結果、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することができる。
【0119】
図18は、図4に示す異物検出装置135の受信部30及び吸音部材40のさらに他の構成例について説明するための説明図である。
【0120】
図18に示すように、受信部30は、複数の超音波センサ36を備える。さらに、受信部30は、複数の超音波センサ36の振動面37と搬送路115との間に設置される複数の吸音部材40を備える。
【0121】
各超音波センサ36は、3列交互に最密配置される。吸音部材40は、各超音波センサ36の走査範囲が、搬送方向A、及び走査方向において重複しないように設置される。尚且つ、吸音部材40は、各超音波センサ36の走査範囲間に不感域が存在しないように配置される。即ち、受信部30は、複数の超音波センサ36及び吸音部材40を備える超音波ラインセンサを備える。
【0122】
図19は、図18に示す異物検出装置135の受信部30及び吸音部材40の例について説明するための説明図である。
【0123】
図19に示すように、受信部30の複数の超音波センサ36及ぶ吸音部材40は、超音波センサ36が3列に配置される場合に振動面37の有効領域が最大となるように配置される。
【0124】
例えば、超音波センサ36の振動面37の半径をrとし、吸音部材40の走査方向における幅をaとし、搬送方向あにおける長さをbとする。
【0125】
この場合、感知範囲を最大にする為に、吸音部材40の走査方向における幅aは、4r/3で示すことが出来る。また、吸音部材40の搬送方向Aにおける長さbは、b=√{a2+(2r)2}で示すことが出来る。
【0126】
上記したように複数の超音波センサ36及び吸音部材40を3列交互に配置することにより、異物検出装置135は、さらに高い分解能で異物、及び重券を検出することができる。この結果、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することができる。
【0127】
図20は、図4に示す異物検出装置135の受信部30及び吸音部材40のさらに他の構成例について説明するための説明図である。
【0128】
図20に示すように、受信部30は、複数の超音波センサ36を備える。さらに、受信部30は、複数の超音波センサ36の振動面37と搬送路115との間に設置される複数の吸音部材40を備える。
【0129】
各超音波センサ36は、3列交互に最密配置される。吸音部材40は、全ての超音波センサ36の振動面37を覆う事ができる形状で設けられている。さらに、吸音部材40は、各振動面37に対応する位置に開口部41を備える。各開口部41は、各振動面37と重なる範囲内に矩形状で設けられる。この場合、送信部10から出力される超音波は、各振動面37において各開口部41と重なる範囲(有効領域)にのみ入射する。図20は、有効領域をハッチングで示している。
【0130】
即ち、吸音部材40の各開口部41は、各振動面37の有効領域の走査方向における幅wと、搬送方向Aにおける長さlと、を一定にするように保つように設置される。尚且つ、吸音部材40の各開口部41は、各超音波センサ36の走査範囲間に不感域が存在しないように配置される
また、吸音部材40の各開口部41は、各振動面37の有効領域の走査範囲が走査方向において重複しないように設置される。即ち、搬送方向Aに3列に配列された超音波センサ36の振動面37の有効領域は、図20に走査範囲w1、w2、及びw3として示すように、それぞれ異なる範囲を走査する。
【0131】
上記したように複数の超音波センサ36、吸音部材40の開口部41を設置することにより、異物検出装置135は、受信部30(超音波ラインセンサ)の搬送方向Aにおける分解能を高める事ができる。また、振動面37の有効領域は、搬送方向Aにおいて長大になることを回避することができる。
【0132】
さらに、各開口部41の設置位置の間隔が搬送方向Aにおいて短くなるように調整することにより、各超音波センサ36の検知位置が搬送方向Aに大きくずれることを防ぐことができる。
【0133】
この結果、より高い精度で超音波を検出する超音波ラインセンサ、及び超音波ラインセンサを備える紙葉類処理装置を提供することができる。
【0134】
なお、上記した実施形態では、異物検出装置135は、紙葉類7に付着する異物8を検出する構成として説明したが、この構成に限定されない。異物検出装置135は、設定回路35の比較基準値を調整することにより、紙葉類7の重なり(重券)も同様に検出することが出来る。
【0135】
また、上記した実施形態では、超音波センサ36を複数配列してラインセンサを構成する場合、各超音波センサ36の走査範囲が、搬送方向A、及び走査方向において重複しないように吸音部材40を設置するとして説明したがこの構成に限定されない。検知結果に影響を与えない範囲であれば、各超音波センサ36の走査範囲が重複する構成であってもよい。
【0136】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0137】
7…紙葉類、8…異物、10…送信部、11…発信回路、12…パワーアンプ、20…吸音部材、30…受信部、31…アンプ、32…バンドパスフィルタ、33…整流回路、34…比較回路、35…設定回路、36…超音波センサ、37…振動面、40…吸音部材、41…開口部、100…紙葉類処理装置、112…投入部、113…取出部、114…吸着ローラ、115…搬送路、116…検査部、117…画像読取装置、 118…画像読取装置、119…厚み検査部、125…ゲート、126…排除搬送路、127…排除集積部、132…集積・結束部、133…裁断部、134…スタッカ、135…異物検出装置、151…主制御部、151a…記憶部、152…搬送制御部、153…集積・結束制御部、155…CPU、156…裁断制御部、
【特許請求の範囲】
【請求項1】
振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、
前記各超音波センサの振動面と検出対象との間に設けられ、超音波を遮断する吸音部材と、
を具備し、
前記吸音部材は、前記検出対象の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記検出対象の搬送方向と平行な2辺を持つように設けられる、
ことを特徴とする超音波ラインセンサ。
【請求項2】
前記吸音部材は、前記各振動面の前記吸音部材と重ならない有効領域が矩形状を成すように設けられる、ことを特徴とする請求項1に記載の超音波ラインセンサ。
【請求項3】
前記吸音部材は、前記各振動面の有効領域による走査範囲が前記走査方向において連続するように設けられることを特徴とする請求項1に記載の超音波ラインセンサ。
【請求項4】
前記吸音部材は、前記各振動面の有効領域による走査範囲が他の振動面の有効領域による走査範囲と重複しないように設けられることを特徴とする請求項1に記載の超音波ラインセンサ。
【請求項5】
紙葉類を搬送する搬送部と、
振動面を有し、前記振動面を振動させることにより前記搬送部により搬送される紙葉類に対して超音波を出力する送信部と、
前記搬送部を挟んで前記送信部と対向する位置に設けられる振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、前記各超音波センサの振動面と前記搬送部との間に設けられ、超音波を遮断する吸音部材と、を具備し、前記紙葉類を透過する超音波を受信する受信部と、
前記受信部の前記複数の超音波センサにより検出する検出信号と、予め記憶される基準値とを比較し、比較結果に基づいて前記紙葉類に異物が付着しているか否かを判定する判定部と、
前記判定部による判定結果に基づいて、前記紙葉類を区分する区分処理部と、
を具備し、
前記吸音部材は、前記紙葉類の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記紙葉類の搬送方向と平行な2辺を持つように設けられる、
を具備することを特徴とする紙葉類処理装置。
【請求項1】
振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、
前記各超音波センサの振動面と検出対象との間に設けられ、超音波を遮断する吸音部材と、
を具備し、
前記吸音部材は、前記検出対象の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記検出対象の搬送方向と平行な2辺を持つように設けられる、
ことを特徴とする超音波ラインセンサ。
【請求項2】
前記吸音部材は、前記各振動面の前記吸音部材と重ならない有効領域が矩形状を成すように設けられる、ことを特徴とする請求項1に記載の超音波ラインセンサ。
【請求項3】
前記吸音部材は、前記各振動面の有効領域による走査範囲が前記走査方向において連続するように設けられることを特徴とする請求項1に記載の超音波ラインセンサ。
【請求項4】
前記吸音部材は、前記各振動面の有効領域による走査範囲が他の振動面の有効領域による走査範囲と重複しないように設けられることを特徴とする請求項1に記載の超音波ラインセンサ。
【請求項5】
紙葉類を搬送する搬送部と、
振動面を有し、前記振動面を振動させることにより前記搬送部により搬送される紙葉類に対して超音波を出力する送信部と、
前記搬送部を挟んで前記送信部と対向する位置に設けられる振動面を有し、前記振動面に入射する超音波に応じて電気信号を生成する複数の超音波センサと、前記各超音波センサの振動面と前記搬送部との間に設けられ、超音波を遮断する吸音部材と、を具備し、前記紙葉類を透過する超音波を受信する受信部と、
前記受信部の前記複数の超音波センサにより検出する検出信号と、予め記憶される基準値とを比較し、比較結果に基づいて前記紙葉類に異物が付着しているか否かを判定する判定部と、
前記判定部による判定結果に基づいて、前記紙葉類を区分する区分処理部と、
を具備し、
前記吸音部材は、前記紙葉類の搬送方向と直交する走査方向における前記各振動面の両端部と重なる位置に、前記各振動面の前記吸音部材と重ならない有効領域が前記紙葉類の搬送方向と平行な2辺を持つように設けられる、
を具備することを特徴とする紙葉類処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2012−8054(P2012−8054A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−145521(P2010−145521)
【出願日】平成22年6月25日(2010.6.25)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月25日(2010.6.25)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]