
超音波リニアモータ
【目的】 本発明の目的は、棒材の外周を駆動する構造の超音波リニアモータにより、小型で安価な超音波リニアモータを提供することにある。
【構成】 本発明は、進行方向に平行に振動する中央の圧電素子2を挟んで、その両側に進行方向と垂直に振動する2対の圧電素子3,4を有し、前記2対の圧電素子3,4が棒材1をつかむように構成したことを特徴とする。中央の圧電素子2は1個でも2個以上でもよい。
【構成】 本発明は、進行方向に平行に振動する中央の圧電素子2を挟んで、その両側に進行方向と垂直に振動する2対の圧電素子3,4を有し、前記2対の圧電素子3,4が棒材1をつかむように構成したことを特徴とする。中央の圧電素子2は1個でも2個以上でもよい。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、超音波振動を駆動源とし棒材に沿って駆動する超音波リニアモータに関する。
【0002】
【従来の技術】従来の超音波リニアモータは、特開平02−30297号公報に記載されているように、振動面をある部材に圧接させ、圧接面と振動面にある加圧力を加える方法がとられている。
【0003】
【発明が解決しようとする課題】上記従来技術では、振動面をある部材に圧接させるために、加圧用のバネ、摺動のためのベアリング機構が必要となり、リニアモータの小型化が阻害され、コストも高くなるという問題があった。
【0004】本発明の目的は、棒材の外周面を駆動する超音波リニアモータにより、小型で安価な超音波リニアモータを提供することにある。
【0005】
【課題を解決するための手段】上記目的を達成するために、本発明の超音波リニアモータでは圧電素子により構成される駆動部に棒材を貫通させ、この棒材の外周面を圧電素子がつかむようにしながら移動するようにすることで達成される。
【0006】
【作用】本発明の作用は、人が棒登りをするときと似ている。まず前記2対の圧電素子のうち一方で棒材をつかみ、他方はつかまない。この状態で前記中央の圧電素子を進行方向に伸ばす。つぎに前記2対の圧電素子のつかむ、つかまないを逆にしてやり、この状態で前記中央の圧電素子を縮めてやる。以上の動作により、前記中央の圧電素子の伸び量分移動する。これを繰り返すことにより、リニア駆動を実現する。
【0007】
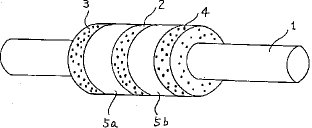
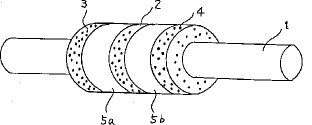
【実施例】以下、本発明の実施例を図1により説明する。図1は棒材1に丸棒を使用した例で、棒材1を包むようにして、径方向に振動するリング状圧電素子3および4、棒材1の軸方向に振動するリング状圧電素子2、さらに前記3つの圧電素子2、3、4の間に挟まれる中間リング5a、5bが一体に構成されている。圧電素子3、4の内径は棒材1の外径に対し、収縮時には締め代、膨張時には隙間ができるよう設定されている。また、圧電素子2と中間リング5a、5bは棒材1と径方向に隙間をとってある。このように構成された図1において、棒材1上を図面左から右へ駆動する場合を説明する。まず圧電素子3は収縮の状態で、棒材1を挟み付けている。圧電素子4は膨張の状態で棒材1とは隙間がある。この時に圧電素子2を膨張の状態にすると、その膨張分圧電素子4は右に移動する。つぎに圧電素子4を収縮の状態にして、圧電素子3を膨張の状態に切り替える。この時圧電素子2を収縮の状態にすると、その収縮分つまり前記の膨張分圧電素子2は右に移動する。以上これまでの動作により、圧電素子2、3、4および中間リング5a、5bが圧電素子2の変位量分移動することとなり、この動作を圧電素子2、3、4に超音波振動を適当な位相差で駆動させて繰り返すことにより、高速のリニア駆動が実現する。
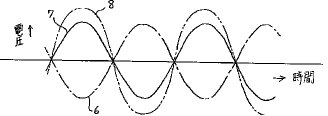
【0008】図2は図1の圧電素子2、3、4に加える交流電圧の例で、曲線6は圧電素子3に加える電圧、曲線7は圧電素子4に加える電圧、曲線8は圧電素子2に加える電圧を示す。曲線6と曲線7は互いに反対の極性のため、これによって動作する圧電素子3と圧電素子4は、一方が膨張の時は他方は収縮となり、その逆に一方が収縮の時は他方は膨張となる。ここで圧電素子2に曲線8の電圧を加えると、これは圧電素子4に加わる電圧と同じ極性のため、図1において説明した動作を繰り返すことになる。なお、駆動方向を逆の図1右から左にするには、圧電素子2の振動の位相を180゜変えてやればよい。つまり曲線8を反対にすればよい。
【0009】次に本発明の他の実施例を図3により説明する。
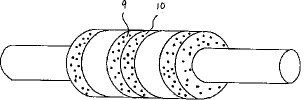
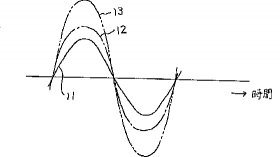
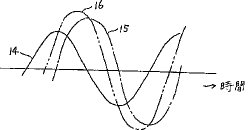
【0010】図3は図1における軸方向に振動する圧電素子2を2対に増やした例で圧電素子9、10を軸方向の振動に使用している。基本動作は図1と同様であるが、軸方向に2対の圧電素子9、10を使用しているため変位量が大きくなり、より高速な駆動を実現できる。さらに、圧電素子9、10の振動の位相をずらすことで、駆動速度を変えることも可能である。これを図を使って説明する。図4の曲線11は圧電素子9に加わる電圧、曲線12は圧電素子10に加わる電圧を示す。圧電素子9と10の変位の合計は曲線13で表され、曲線11と12の位相差のない図4のときが最大の変位を得られる。つぎに図5は、圧電素子9に加わる電圧の曲線14と圧電素子10に加わる電圧の曲線15の位相をずらしたときで、圧電素子9と圧電素子10の変位の合計を示す曲線16は、図4の曲線13より振幅が小さくなり、変位が減ることがわかる。この結果、駆動速度も減ることになり、圧電素子9と圧電素子10に加える電圧の位相を変えることで駆動速度を変えることができることがわかる。なお、図1の例、図3の例とも、より大きな変位を得るために圧電素子2、3、4、9、10に積層型の圧電素子を使用してもよい。
【0011】
【発明の効果】本発明によれば、1本の棒材と、圧電素子と中間材で構成される駆動部のみで超音波リニアモータが構成でき、加圧用のバネ、摺動のためのベアリング機構が不要であり、小型で安価な超音波リニアモータができるという効果がある。さらに駆動電圧の位相を変えるだけで駆動方向、駆動速度を変えることができ、制御性に優れた超音波リニアモータができるという効果がある。
【図面の簡単な説明】
【図1】本発明の一実施例を示す斜視図。
【図2】本発明の一実施例の駆動電圧と変位を示す図。
【図3】本発明の他の実施例を示す斜視図。
【図4】本発明の他の実施例の駆動電圧と変位を示す図。
【図5】本発明の他の実施例の駆動電圧と変位を示す図。
【符号の説明】
1 棒材
2 圧電素子
3 圧電素子
4 圧電素子
5a 中間リング
5b 中間リング
6 曲線
7 曲線
8 曲線
9 圧電素子
10 圧電素子
11 曲線
12 曲線
13 曲線
14 曲線
15 曲線
16 曲線
【0001】
【産業上の利用分野】本発明は、超音波振動を駆動源とし棒材に沿って駆動する超音波リニアモータに関する。
【0002】
【従来の技術】従来の超音波リニアモータは、特開平02−30297号公報に記載されているように、振動面をある部材に圧接させ、圧接面と振動面にある加圧力を加える方法がとられている。
【0003】
【発明が解決しようとする課題】上記従来技術では、振動面をある部材に圧接させるために、加圧用のバネ、摺動のためのベアリング機構が必要となり、リニアモータの小型化が阻害され、コストも高くなるという問題があった。
【0004】本発明の目的は、棒材の外周面を駆動する超音波リニアモータにより、小型で安価な超音波リニアモータを提供することにある。
【0005】
【課題を解決するための手段】上記目的を達成するために、本発明の超音波リニアモータでは圧電素子により構成される駆動部に棒材を貫通させ、この棒材の外周面を圧電素子がつかむようにしながら移動するようにすることで達成される。
【0006】
【作用】本発明の作用は、人が棒登りをするときと似ている。まず前記2対の圧電素子のうち一方で棒材をつかみ、他方はつかまない。この状態で前記中央の圧電素子を進行方向に伸ばす。つぎに前記2対の圧電素子のつかむ、つかまないを逆にしてやり、この状態で前記中央の圧電素子を縮めてやる。以上の動作により、前記中央の圧電素子の伸び量分移動する。これを繰り返すことにより、リニア駆動を実現する。
【0007】
【実施例】以下、本発明の実施例を図1により説明する。図1は棒材1に丸棒を使用した例で、棒材1を包むようにして、径方向に振動するリング状圧電素子3および4、棒材1の軸方向に振動するリング状圧電素子2、さらに前記3つの圧電素子2、3、4の間に挟まれる中間リング5a、5bが一体に構成されている。圧電素子3、4の内径は棒材1の外径に対し、収縮時には締め代、膨張時には隙間ができるよう設定されている。また、圧電素子2と中間リング5a、5bは棒材1と径方向に隙間をとってある。このように構成された図1において、棒材1上を図面左から右へ駆動する場合を説明する。まず圧電素子3は収縮の状態で、棒材1を挟み付けている。圧電素子4は膨張の状態で棒材1とは隙間がある。この時に圧電素子2を膨張の状態にすると、その膨張分圧電素子4は右に移動する。つぎに圧電素子4を収縮の状態にして、圧電素子3を膨張の状態に切り替える。この時圧電素子2を収縮の状態にすると、その収縮分つまり前記の膨張分圧電素子2は右に移動する。以上これまでの動作により、圧電素子2、3、4および中間リング5a、5bが圧電素子2の変位量分移動することとなり、この動作を圧電素子2、3、4に超音波振動を適当な位相差で駆動させて繰り返すことにより、高速のリニア駆動が実現する。
【0008】図2は図1の圧電素子2、3、4に加える交流電圧の例で、曲線6は圧電素子3に加える電圧、曲線7は圧電素子4に加える電圧、曲線8は圧電素子2に加える電圧を示す。曲線6と曲線7は互いに反対の極性のため、これによって動作する圧電素子3と圧電素子4は、一方が膨張の時は他方は収縮となり、その逆に一方が収縮の時は他方は膨張となる。ここで圧電素子2に曲線8の電圧を加えると、これは圧電素子4に加わる電圧と同じ極性のため、図1において説明した動作を繰り返すことになる。なお、駆動方向を逆の図1右から左にするには、圧電素子2の振動の位相を180゜変えてやればよい。つまり曲線8を反対にすればよい。
【0009】次に本発明の他の実施例を図3により説明する。
【0010】図3は図1における軸方向に振動する圧電素子2を2対に増やした例で圧電素子9、10を軸方向の振動に使用している。基本動作は図1と同様であるが、軸方向に2対の圧電素子9、10を使用しているため変位量が大きくなり、より高速な駆動を実現できる。さらに、圧電素子9、10の振動の位相をずらすことで、駆動速度を変えることも可能である。これを図を使って説明する。図4の曲線11は圧電素子9に加わる電圧、曲線12は圧電素子10に加わる電圧を示す。圧電素子9と10の変位の合計は曲線13で表され、曲線11と12の位相差のない図4のときが最大の変位を得られる。つぎに図5は、圧電素子9に加わる電圧の曲線14と圧電素子10に加わる電圧の曲線15の位相をずらしたときで、圧電素子9と圧電素子10の変位の合計を示す曲線16は、図4の曲線13より振幅が小さくなり、変位が減ることがわかる。この結果、駆動速度も減ることになり、圧電素子9と圧電素子10に加える電圧の位相を変えることで駆動速度を変えることができることがわかる。なお、図1の例、図3の例とも、より大きな変位を得るために圧電素子2、3、4、9、10に積層型の圧電素子を使用してもよい。
【0011】
【発明の効果】本発明によれば、1本の棒材と、圧電素子と中間材で構成される駆動部のみで超音波リニアモータが構成でき、加圧用のバネ、摺動のためのベアリング機構が不要であり、小型で安価な超音波リニアモータができるという効果がある。さらに駆動電圧の位相を変えるだけで駆動方向、駆動速度を変えることができ、制御性に優れた超音波リニアモータができるという効果がある。
【図面の簡単な説明】
【図1】本発明の一実施例を示す斜視図。
【図2】本発明の一実施例の駆動電圧と変位を示す図。
【図3】本発明の他の実施例を示す斜視図。
【図4】本発明の他の実施例の駆動電圧と変位を示す図。
【図5】本発明の他の実施例の駆動電圧と変位を示す図。
【符号の説明】
1 棒材
2 圧電素子
3 圧電素子
4 圧電素子
5a 中間リング
5b 中間リング
6 曲線
7 曲線
8 曲線
9 圧電素子
10 圧電素子
11 曲線
12 曲線
13 曲線
14 曲線
15 曲線
16 曲線
【特許請求の範囲】
【請求項1】 進行方向に平行に振動する中央の圧電素子を挟んで、その両側に進行方向と垂直に振動する2対の圧電素子を有し、これらのなかに棒材が進行方向と平行に貫通し、前記2対の圧電素子が棒材をつかむように構成したことを特徴とする超音波リニアモータ。
【請求項2】 前記両側の2対の圧電素子と中央の圧電素子に位相差のある駆動電圧を加え、その位相差を変えることにより駆動方向を変えることを特徴とする請求項1記載の超音波リニアモータ。
【請求項3】 前記中央の圧電素子を2つ以上設けたことを特徴とする請求項1記載の超音波リニアモータ。
【請求項4】 前記中央の2つ以上の圧電素子に位相差のある交流電圧を加え、その位相差を変えることにより、駆動速度を変えることを特徴とする請求項3記載の超音波リニアモータ。
【請求項1】 進行方向に平行に振動する中央の圧電素子を挟んで、その両側に進行方向と垂直に振動する2対の圧電素子を有し、これらのなかに棒材が進行方向と平行に貫通し、前記2対の圧電素子が棒材をつかむように構成したことを特徴とする超音波リニアモータ。
【請求項2】 前記両側の2対の圧電素子と中央の圧電素子に位相差のある駆動電圧を加え、その位相差を変えることにより駆動方向を変えることを特徴とする請求項1記載の超音波リニアモータ。
【請求項3】 前記中央の圧電素子を2つ以上設けたことを特徴とする請求項1記載の超音波リニアモータ。
【請求項4】 前記中央の2つ以上の圧電素子に位相差のある交流電圧を加え、その位相差を変えることにより、駆動速度を変えることを特徴とする請求項3記載の超音波リニアモータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開平5−49273
【公開日】平成5年(1993)2月26日
【国際特許分類】
【出願番号】特願平3−196759
【出願日】平成3年(1991)8月6日
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【出願人】(000243364)本多電子株式会社 (255)
【公開日】平成5年(1993)2月26日
【国際特許分類】
【出願日】平成3年(1991)8月6日
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【出願人】(000243364)本多電子株式会社 (255)
[ Back to top ]