
超音波接合検査装置、超音波接合検査方法、超音波接合装置、および超音波接合方法
【課題】電極タブに力を加えることなく超音波接合状態を検査することができる超音波接合検査装置を提供する。
【解決手段】超音波接合されたワーク900a,900bの温度分布を測定する温度測定手段200と、温度分布が測定されるワーク900a,900bの未接合領域と超音波接合領域との温度差を利用して、当該ワーク900a,900bの超音波接合領域を算出する算出手段300と、を有する。
【解決手段】超音波接合されたワーク900a,900bの温度分布を測定する温度測定手段200と、温度分布が測定されるワーク900a,900bの未接合領域と超音波接合領域との温度差を利用して、当該ワーク900a,900bの超音波接合領域を算出する算出手段300と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、超音波接合検査装置、超音波接合検査方法、超音波接合装置、および超音波接合方法に関する。
【背景技術】
【0002】
電気自動車およびハイブリッド電気自動車のモータ駆動用電源として、リチウムイオン電池およびニッケル水素電池などの二次電池の開発が盛んである。発電要素を外装部材内に封止した扁平形状の単電池を複数積層するとともに電気的に接続して構成される組電池では、隣接する複数の単電池の外装部材から導出される電極タブが、超音波接合法によって相互に接合されている。
【0003】
超音波接合された電極タブの接合状態を検査する方法としては、相互に接合された電極タブを引き剥がす方向に所定の力を作用させ、電極タブが破断するか否かを判定することにより電極タブの接合強度を検査する方法が知られている。しかしながら、電極タブが破断するか否かを判定する機械的な検査方法では、電極タブに力を加える際の電極タブの変形および電極タブの金属疲労(荷重印加履歴)などにより、電極タブの接合強度が劣化するおそれがある。したがって、検査後の電極タブ(単電池)は破棄されなければならず、電極タブは抜き取り検査されるのが現状である。
【0004】
なお、下記の特許文献1には、超音波接合時における超音波振動の振幅を測定することにより、ワークの接合状態を代替的に検知する方法が開示されている。
【特許文献1】特開平06−099289号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、上記の問題を解決するためになされたものである。したがって、本発明の目的は、電極タブに力を加えることなく超音波接合状態を検査することができる超音波接合検査装置および超音波接合検査方法ならびにこれらを用いた超音波接合装置および超音波接合方法を提供することである。
【課題を解決するための手段】
【0006】
本発明の上記目的は、下記の手段によって達成される。
【0007】
本発明の超音波接合検査装置は、超音波接合されたワークの温度分布を測定する温度測定手段と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、を有することを特徴とする。
【0008】
本発明の超音波接合検査方法は、超音波接合されたワークの温度分布を測定する段階と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、を有することを特徴とする。
【0009】
本発明の超音波接合装置は、接合条件にしたがってワークを超音波接合する超音波接合手段と、前記超音波接合されたワークの温度分布を測定する温度測定手段と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する制御手段と、を有することを特徴とする。
【0010】
本発明の超音波接合方法は、超音波接合されたワークの温度分布を測定する段階と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する段階と、を有することを特徴とする。
【発明の効果】
【0011】
本発明の超音波接合検査装置および超音波接合検査方法によれば、超音波接合されたワークの温度分布から当該ワークの超音波接合領域を算出することができるため、ワークに力を加えることなく、接合状態を検査することができる。したがって、検査後のワークを破棄する必要がなく、全てのワークの接合状態を検査することができる。
【0012】
また、本発明の超音波接合装置および超音波接合方法によれば、超音波接合されたワークの温度分布から当該ワークの超音波接合領域を算出することができるため、上記の効果に加えて、ワークの検査結果を接合条件にフィードバックすることができる。したがって、最適な接合条件での超音波接合を維持することができる。
【発明を実施するための最良の形態】
【0013】
以下、添付の図面を参照して本発明の実施の形態を詳細に説明する。なお、図中、同様の部材には同一の符号を用いた。
【0014】
(第1の実施の形態)
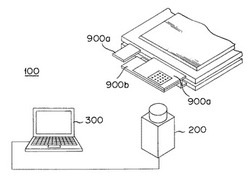
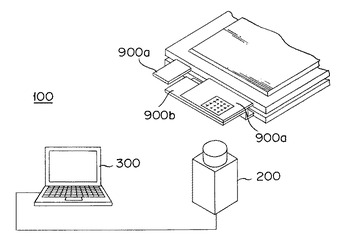
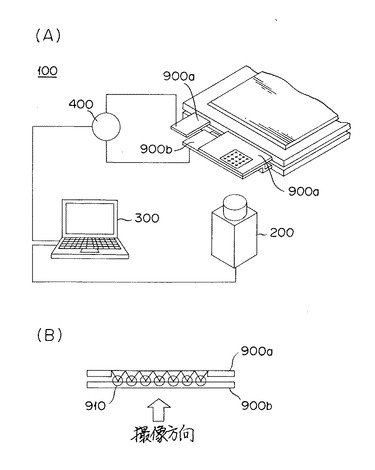
図1は、本発明の第1の実施の形態における超音波接合検査装置の概略構成を示す図である。図1に示されるとおり、本実施の形態の超音波接合検査装置100は、サーモカメラ200および処理部300を備える。
【0015】
サーモカメラ200は、温度測定手段として、超音波接合された電極タブ900の温度分布を測定するものである。サーモカメラ200は、超音波接合された一対の電極タブ900のうち下側電極タブ900bに対向するように配置され、電極タブ900の温度分布を撮像する。サーモカメラ自体は一般的なサーモカメラであるため、詳細な説明は省略する。また、サーモカメラ200で取得された画像情報は、処理部300に送信される。
【0016】
処理部300は、測定される電極タブ900の温度分布に基づいて、電極タブ900の超音波接合領域を算出するものである。処理部300は、サーモカメラ200から送信される画像情報を受信して、画像情報における所定温度以上の画素数を計算することにより、電極タブ900における超音波接合領域の面積を算出する。処理部300は、たとえば、一般的なコンピュータである。
【0017】
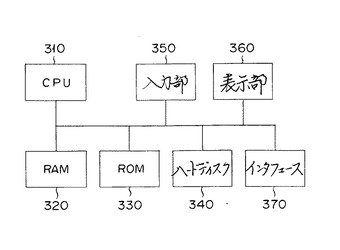
次に、図2を参照して、本実施の形態の処理部300について詳細に説明する。図2は、本実施の形態における処理部300の概略構成を示すブロック図である。図2に示されるとおり、本実施の形態の処理部300は、CPU310、RAM320、ROM330、ハードディスク340、入力部350、表示部360、およびインタフェース370を有する。これらの各部は、バスを介して相互に接続されている。
【0018】
CPU310は、サーモカメラ200で取得される画像情報に対して種々の演算を実行するものである。CPU310は、算出部(算出手段)、第1判定部(第1の判定手段)、および判断部(判断手段)として機能する。
【0019】
ここで、算出部は、画像情報における所定温度以上の画素数を計算することにより、超音波接合領域の面積を算出するものである。第1判定部は、算出される超音波接合領域の面積が下限値未満か否かを判定するものである。判断部は、超音波接合領域の面積が下限値未満の場合、電極タブが接合不良であると判断するものである。なお、各部の具体的な処理内容については、後述する。
【0020】
RAM320は、上述した画像情報を一時的に記憶するものであり、ROM330は、制御プログラムおよびパラメータなどを予め記憶するものである。
【0021】
ハードディスク340は、複数の電極タブに対してそれぞれ算出される超音波接合領域の面積を、対応する電極タブの接合情報とともに記憶する記憶手段として機能する。また、ハードディスク340は、画像情報における所定温度以上の画素数を計算することにより、超音波接合領域の面積を算出する算出プログラム、算出される超音波接合領域の面積が下限値未満か否かを判定する判定プログラム、および超音波接合領域の面積が下限値未満の場合、電極タブが接合不良であると判断する判断プログラムを格納する。
【0022】
入力部350は、たとえば、キーボード、タッチパネル、およびマウスなどのポインティングデバイスであり、表示部360は、たとえば、液晶ディスプレイおよびCRTディスプレイなどである。
【0023】
インタフェース370は、サーモカメラ200から送信される画像信号を受信する。
【0024】
以上のとおり、構成される本実施の形態における超音波接合検査装置では、超音波接合された電極タブの温度分布が測定され、測定される電極タブの温度分布に基づいて、当該電極タブの超音波接合領域の面積が算出される。そして、算出される超音波接合領域の面積に基づいて、電極タブの超音波接合の良否が判断される。以下、本実施の形態における超音波接合検査方法について詳細に説明する。
【0025】
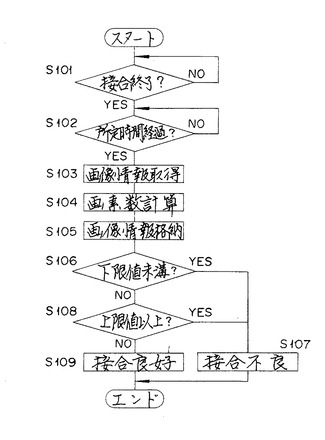
図3は、本実施の形態の超音波接合検査方法を示すフローチャートである。本実施の形態では、超音波接合時の摩擦熱により発熱している超音波接合直後の電極タブの温度分布が測定され、測定結果に基づいて超音波接合の良否が判断される。より具体的には、超音波接合直後の超音波接合領域は未接合領域よりも高い温度を有しており、サーモカメラにより超音波接合領域に対応する高温領域の面積が算出され、当該面積から超音波接合の接合強度が十分か否か、すなわち、超音波接合の良否が判断される。
【0026】
図3に示されるとおり、本実施の形態の超音波接合検査方法では、まず、超音波接合が終了したか否かが判断される(ステップS101)。超音波接合が終了していない場合(ステップS101:NO)、超音波接合が終了するまで待機する。一方、超音波接合が終了した場合(ステップS101:YES)、超音波接合の終了時点から所定時間が経過したか否かが判断される(ステップS102)。
【0027】
所定時間が経過していない場合(ステップS102:NO)、所定時間が経過するまで待機する。一方、所定時間が経過した場合(ステップS102:YES)、電極タブの温度分布をサーモカメラにて撮像し、画像情報が取得される(ステップS103)。上述したとおり、超音波接合直後の電極タブは、超音波接合時の摩擦熱により超音波接合領域が未接合領域よりも高い温度を有している。
【0028】
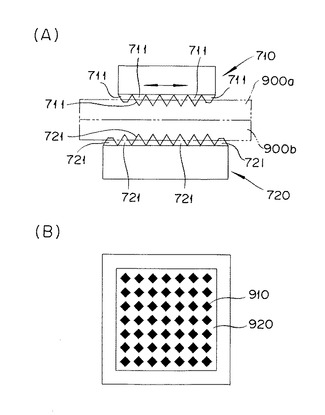
ここで、図4(A)は、本実施の形態における電極タブの超音波接合を説明するための図である。図4(A)に示されるとおり、本実施の形態では、重ね合わされた一組の電極タブ900がホーン710とアンビル720とにより挟み込まれ、所定の加圧力を与えられながら、ホーン710が超音波振動により往復直線運動することで、電極タブ900が超音波接合される。より具体的には、本実施の形態のホーン710およびアンビル720はそれぞれ複数の突起部711,721を有しており、突起部711,721に対応する電極タブ900の領域が超音波接合される。
【0029】
図4(B)は、サーモカメラによって測定される電極タブの温度分布のサーモグラフィを示す図である。図4(B)に示されるとおり、本実施の形態の超音波接合直後の電極タブは、複数の突起部に対応する超音波接合領域(図の黒色部分)910が未接合領域920よりも高い温度を有している。なお、超音波接合される上側電極タブ900aと下側電極タブ900bとの間に油などが介在して電極タブ900が摩擦されない場合には、図4(B)に示す図とは異なり、全体的に温度が低い画像情報が得られる。
【0030】
次に、画像情報における所定温度以上の画素数が計算され(ステップS104)、画像情報が格納される(ステップS105)。本実施の形態では、未接合領域よりも温度の高い超音波接合領域の面積が算出されるように所定温度が設定され、当該温度以上の画素数が計算されることにより、超音波接合領域の面積が算出される。また、画素数が算出された画像情報は、別途に入力される接合情報とともにハードディスク340に格納される。なお、接合情報とは、画像情報が取得された電極タブの表面粗さ、超音波接合時の接合条件、および超音波接合時の環境(たとえば、湿度)などである。
【0031】
次に、算出された画素数が下限値未満か否かが判断される(ステップS106)。言い換えれば、電極タブの超音波接合領域の面積が、必要な接合強度に対応する下限面積未満か否かが判断される。本実施の形態では、予め測定される超音波接合が良好な電極タブの温度分布に基づいて、上記の下限値が設定される。算出された画素数が下限値未満の場合(ステップS106:YES)、接合強度不足、すなわち超音波接合が不良であると判断され(ステップS107)、処理が終了される。なお、判断結果は、たとえば、表示部360に表示される。
【0032】
一方、算出された画素数が下限値以上の場合(ステップS106:NO)、当該画素数が上限値以下か否かが判断される(ステップS108)。ここで、電極タブに必要以上に大きな摩擦力がかる場合、超音波接合領域に対応する高温領域が大きくなる一方で、電極タブが劣化してしまうおそれがある。したがって、本実施の形態では、接合強度を判定するための下限値(下限面積)に加えて、電極タブの劣化を判定するための上限値(上限面積)が設定されることが好ましい。
【0033】
算出された画素数が上限値以上の場合(ステップS108:YES)、超音波接合が不良であると判断され(ステップS107)、処理が終了される。一方、算出された画素数が上限値未満の場合(ステップS108:NO)、超音波接合が良好であると判断され(ステップS109)、処理が終了される。
【0034】
以上のとおり、図3に示すフローチャートの処理によれば、超音波接合直後の電極タブの超音波接合領域と未接合領域との温度差を利用して、電極タブにおける超音波接合領域の面積が算出される。そして、算出される面積に基づいて、電極タブの接合強度、すなわち超音波接合の良否が判断される。より具体的には、超音波接合領域の面積が上限値以上および下限値未満の場合、超音波接合が不良であると判断される。
【0035】
なお、本実施の形態の超音波接合検査装置では、電極タブにおける超音波接合領域の面積を算出した。しかしながら、画像情報から超音波接合領域の分布形状(分布状況)を算出することもできる。このような構成にすれば、超音波接合の接合強度のみならず、電極タブの所望の領域が均一に超音波接合されているか否かを判断することができる。その結果、電極タブの接合品質がより向上される。
【0036】
また、本実施の形態では、所定温度以上の画素数を計算することにより超音波接合領域の面積を算出した。しかしながら、所定温度未満の画素数を計算して未接合領域を計算し、全体の面積からの差分を求めることにより、超音波接合領域の面積を算出することもできる。
【0037】
以上のとおり、説明された本実施の形態は、以下の効果を奏する。
【0038】
本実施の形態の超音波接合検査装置は、超音波接合された電極タブの温度分布を測定するサーモカメラと、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する算出部と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブに力を加えることなく、接合状態を検査することができる。その結果、全ての電極タブの接合状態を検査することができる。
【0039】
また、超音波接合領域の面積が直接的に算出されるため、ホーンの振動状態をモニタするといった間接的な接合強度判定方法と比較して、誤差要因が少ない。さらに、ホーンの振動状態は接合時の摩擦熱および装置の発熱などに振動状態が変化し易いことと比較して、本実施の形態の超音波接合装置は、温度をモニタするため簡単に補正することが可能である。
【0040】
算出部は、サーモカメラによって取得される画像情報、電極タブの超音波接合領域を算出する。したがって、電極タブの温度分布から、電極タブにおける超音波接合領域の大きさおよび分布形状などを算出することができる。
【0041】
算出部は、画像情報における所定温度以上の画素数を計算することにより、超音波接合領域の大きさを算出する。したがって、超音波接合領域の面積を容易に算出することができる。
【0042】
本実施の形態の超音波接合検査装置は、超音波接合領域の面積が下限値未満か否かを判定する第1判定部と、超音波接合領域の面積が下限値未満の場合、電極タブが接合不良であると判断する判断部と、をさらに有する。したがって、超音波接合領域の面積から超音波接合の強度が判定され、超音波接合の良否を判断することができる。
【0043】
サーモカメラは、超音波接合時の摩擦熱により超音波接合領域が未接合領域よりも高い温度を有している超音波接合直後の電極タブの温度分布を測定する。したがって、外部からエネルギーを加えることなく、電極タブの温度分布を測定することができる。
【0044】
本実施の形態の超音波接合検査装置は、複数の電極タブに対してそれぞれ算出される超音波接合領域を、対応する電極タブの接合情報とともに記憶する記憶部をさらに有する。したがって、検査結果を累積することができ、超音波接合結果を統計処理して傾向を把握することができる。また、材料のロッド変化および他の誤差要因の変化に対して、検査結果を超音波接合にフィードバックすることができる。
【0045】
本実施の形態の超音波接合検査方法は、超音波接合された電極タブの温度分布を測定する段階と、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する段階と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブに力を加えることなく、接合状態を検査することができる。したがって、全ての電極タブの接合状態を検査することができる。
【0046】
(第2の実施の形態)
第1の実施の形態では、超音波接合時の摩擦により発熱した超音波接合直後の電極タブの温度分布を測定する場合について述べた。本実施の形態では、超音波接合済みの常温状態の電極タブに外部からエネルギーを加えることにより電極タブを発熱させ、発熱させた電極タブの温度分布を測定する場合について述べる。
【0047】
図5(A)は、本発明の第2の実施の形態における超音波接合検査装置の概略構成を示す図である。図5(A)に示されるとおり、本実施の形態の超音波接合検査装置100は、サーモカメラ200、処理部300、および電源400を備える。電源400を除いては、サーモカメラ200および処理部300は、第1の実施の形態の場合と同様であるため、説明は省略する。
【0048】
電源400は、通電手段として、通電により電極タブ900でジュール熱を発生させるものである。電源400は、超音波接合されている一対の電極タブ900を構成する上側電極タブ900aおよび下側電極タブ900bにそれぞれ接続され、電極タブ900に電圧を印加する。また、電源400は、処理部300に電気的に接続されていて、処理部300からの指令に応じて、電圧を印加することができる。
【0049】
以上のとおり構成される本実施の形態の超音波接合検査装置100によれば、まず、処理部300からの指令に基づいて電源400が電極タブ900に電圧を印加することにより、上側電極タブ900aと下側電極タブ900bとが固相接合されている超音波接合領域910に電流が流れ、超音波接合領域910でジュール熱が発生する(図5(B)参照)。超音波接合領域910で発生するジュール熱により超音波接合領域910が未接合領域よりも高い温度を有している電極タブ900の温度分布がサーモカメラにより測定され、測定結果に基づいて、超音波接合の良否が判断される。
【0050】
なお、超音波接合領域910でジュール熱が発生する状態が長時間続く場合、電極タブ900全体がほぼ同一の温度になってしまうため、超音波接合領域910を算出することができない。したがって、通電から所定時間経過後の電極タブ900の温度分布を測定する。また、通電により電極タブ900が加熱されることを除いては、第1の実施の形態と同様であるため、本実施の形態の超音波接合方法についての詳細な説明は省略する。
【0051】
以上のとおり、説明された本実施の形態は、第1の実施の形態における効果に加えて、以下の効果を奏する。
【0052】
本実施の形態の超音波接合検査装置は、通電により超音波接合領域でジュール熱を発生させる電源をさらに有し、サーモカメラは、超音波接合領域でのジュール熱により超音波接合領域が未接合領域よりも高い温度を有している電極タブの温度分布を測定する。したがって、超音波接合直後の電極タブに限定されず、自由なタイミングで電極タブの温度分布が測定され、超音波接合領域を算出することができる。
【0053】
(第3の実施の形態)
本実施の形態は、超音波接合済みの常温状態の電極タブに輻射熱を加えることにより、電極タブを発熱させ、発熱させた電極タブの温度分布を測定する実施の形態である。
【0054】
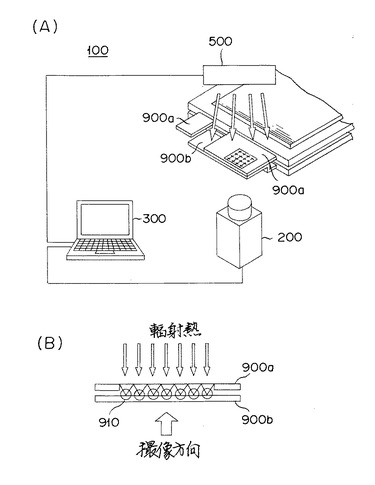
図6(A)は、本発明の第3の実施の形態における超音波接合検査装置の概略構成を示す図である。図6(A)に示されるとおり、本実施の形態の超音波接合検査装置100は、サーモカメラ200、処理部300、およびヒータ500を備える。ヒータ500を除いては、サーモカメラ200および処理部300は、第1の実施の形態の場合と同様であるため、説明は省略する。
【0055】
ヒータ500は、加熱手段として、超音波接合される一対の電極タブ900のうち上側電極タブ900aを輻射熱により加熱するものである。ヒータ500は、電極タブ900を基準としてサーモカメラ200の反対側に配置され、サーモカメラ200と対向する下側電極タブ900bと接合されている上側電極タブ900aに輻射熱を供給する。また、ヒータ500は、処理部300に電気的に接続されていて、処理部300からの指令に応じて、輻射熱を供給することができる。
【0056】
以上のとおり構成される本実施の形態の超音波接合検査装置100によれば、まず、処理部300からの指令に基づいてヒータ500が電極タブ900に輻射熱を供給することにより、当該ヒータ500に対向する上側電極タブ900aが加熱される。上側電極タブ900aが加熱される場合、上側電極タブ900aと下側電極タブ900bとが固相接合されている超音波接合領域910は、上側電極タブ900aと下側電極タブ900bとの間に空気層が介在する未接合領域よりも短時間で熱が伝達される。したがって、上側電極タブ900aが加熱される場合、上側電極タブ900aからの熱伝導により下側電極タブ900bの超音波接合領域910が未接合領域よりも高い温度を有する(図6(B)参照)。超音波接合領域910が未接合領域よりも高い温度を有している下側電極タブ900bの温度分布がサーモカメラにより測定され、測定結果に基づいて、超音波接合の良否が判断される。
【0057】
なお、上側電極タブ900aに輻射熱が長時間供給される場合、電極タブ900全体がほぼ同一の温度になってしまうため、超音波接合領域910を算出することができない。したがって、輻射開始から所定時間経過後の電極タブ900の温度分布を測定する。また、輻射熱により電極タブ900が加熱されることを除いては、第1の実施の形態と同様であるため、本実施の形態の超音波接合方法についての詳細な説明は省略する。
【0058】
以上のとおり、説明された本実施の形態は、第1および第2の実施の形態における効果に加えて、以下の効果を奏する。
【0059】
本実施の形態の超音波接合検査装置は、電極タブを構成する上側電極タブを輻射熱により加熱するヒータをさらに有し、サーモカメラは、上側電極タブからの熱伝導により超音波接合領域が未接合領域よりも高い温度を有している下側電極タブの温度分布を測定する。したがって、超音波接合直後の電極タブに限定されず、自由なタイミングで電極タブの温度分布が測定され、超音波接合領域を算出することができる。さらに、大掛かりな設備を必要としない。
【0060】
(第4の実施の形態)
本実施の形態は、上記第1〜第3の実施の形態の超音波接合検査装置が組み込まれた超音波接合装置の実施の形態である。
【0061】
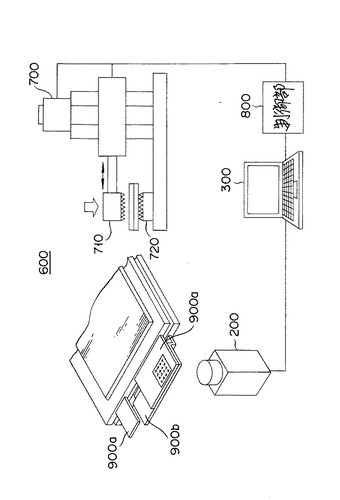
図7は、本発明の第4の実施の形態における超音波接合装置の概略構成を示す図である。図7に示されるとおり、本実施の形態の超音波接合装置600は、サーモカメラ200、処理部300、超音波接合部700、および制御部800を備える。超音波接合部700および制御部800を除いては、サーモカメラ200および処理部300は、第1の実施の形態の場合と同様であるため、説明は省略する。
【0062】
超音波接合部700は、超音波接合手段として、接合条件にしたがって電極タブ900を超音波接合するものである。超音波接合部700は、重ね合わされた一組の電極タブ900に超音波振動を加えることにより電極タブ900を超音波接合する。また、超音波接合部700は、超音波振動で往復直線運動されつつ電極タブ900を加圧するホーン710と、ホーン710によって加圧される電極タブを支持するアンビル720とを有する。また、本実施の形態において、ホーン710およびアンビル720は、それぞれ複数の突起部711,721を備える。
【0063】
制御部800は、超音波接合部700を制御するものである。本実施の形態において、制御部800は、処理部300で算出される超音波接合領域に基づいて、次の電極タブを超音波接合する際の接合条件を制御する。
【0064】
以上のとおり構成される本実施の形態の超音波接合装置600によれば、超音波接合部700によって超音波接合された電極タブ900の温度分布が測定され、測定される温度分布に基づいて、超音波接合領域の面積が算出される。そして、算出される超音波接合領域の面積に基づいて、次に超音波接合される電極タブの接合条件が制御される。以下、本実施の形態における超音波接合方法について詳細に説明する。
【0065】
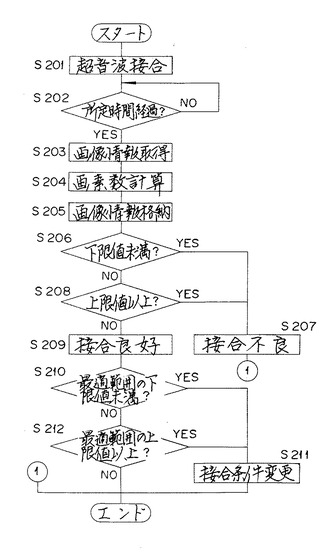
図8は、本実施の形態における超音波接合方法を示すフローチャートである。本実施の形態の超音波接合方法では、まず、電極タブが超音波接合される(ステップS201)。本実施の形態では、予め設定されている接合条件にしたがって、超音波接合部が制御され、電極タブが超音波接合される。
【0066】
次に、超音波接合の終了時点から所定の時間が経過したか否かが判断される(ステップS202)。所定時間が経過していない場合(ステップS202:NO)、所定時間が経過するまで待機する。一方、所定時間が経過した場合(ステップS202:YES)、電極タブの温度分布をサーモカメラにて測定し、温度分布を示す画像情報が取得される(ステップS203)。
【0067】
次に、画像情報における所定温度以上の画素数が計算され(ステップS204)、画像情報が格納される(ステップS205)。本実施の形態では、未接合領域よりも温度の高い超音波接合領域の面積が算出されるように所定温度が設定され、当該温度以上の画素数が計算されることにより、超音波接合領域の面積が算出される。また、画素数が計算された画像情報は接合情報とともにハードディスク340に格納される。
【0068】
そして、算出された画素数が下限値未満か否かが判断される(ステップS206)。算出された画素数が下限値未満の場合(ステップS206:YES)、超音波接合が不良であると判断され(ステップS207)、処理が終了される。一方、算出された画素数が下限値以上の場合(ステップS206:NO)、当該画素数が上限値以下か否かが判断される(ステップS208)。画素数が上限値以上の場合(ステップS208:YES)、超音波接合が不良であると判断され(ステップS207)、処理が終了される。一方、算出された画素数が上限値未満の場合(ステップS208:NO)、超音波接合が良好であると判断され(ステップS209)、ステップS210以下の処理に移行する。
【0069】
そして、ステップS210に示す処理では、算出された画素数が最適な接合状態を示す最適範囲の下限値未満か否かが判断される(ステップS210)。言い換えれば、電極タブにおける超音波接合領域の面積が最適な接合面積の下限面積未満か否かが判断される。なお、CPU310が、超音波接合領域の大きさが最適範囲から外れるか否かを判定する第2判定部(第2の判定手段)として機能する。
【0070】
算出された画素数が最適範囲の下限値未満の場合(ステップS210:YES)、次に超音波接合する電極タブの超音波接合領域が大きくなるように接合条件が変更され(ステップS211)、処理が終了される。より具体的には、予め設定されている関係式にしたがって、超音波接合における接合時間、振動振幅、加圧力、および振動周波数などが大きくなる向きに接合条件が調整される。
【0071】
一方、算出された画素数が最適範囲の下限値以上の場合(ステップS210:NO)、当該画素数が最適範囲の上限値以上か否かが判断される(ステップS212)。画素数が最適範囲の上限値以上の場合(ステップS212:YES)、次に超音波接合する電極タブの超音波接合領域が小さくなるように接合条件が変更され(ステップS211)、処理が終了される。より具体的には、予め設定されている関係式にしたがって、超音波接合における接合時間、振動振幅、加圧力、および振動周波数などが小さくなる向きに接合条件が調整される。一方、算出された画素数が最適範囲の上限値未満の場合(ステップS212:NO)、接合条件を変更することなく処理が終了される。
【0072】
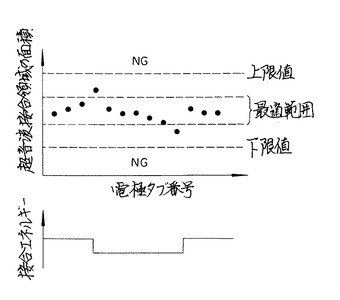
以上のとおり、図8に示すフローチャートの処理によれば、超音波接合領域の面積が上限値以上および下限値未満の場合、超音波接合が不良であると判断される。さらに、超音波接合領域の面積が最適範囲から外れた場合、接合条件が制御され、次の電極タブの超音波接合領域の面積が最適範囲に収まるように調整される。より具体的には、超音接合領域の面積が最適範囲の下限値未満の場合、次の電極タブの超音波接合領域が大きくなるように接合条件が制御され、超音接合領域の面積が最適範囲の上限値以上の場合、次の電極タブの超音波接合領域が小さくなるように接合条件が制御される。
【0073】
図9は、本実施の形態の超音波接合装置により連続的に超音波接合される複数の電極タブの面積および接合エネルギーを説明するための図である。縦軸は超音波接合領域の面積であり、横軸は連続的に超音波接合される電極タブの番号である。図9に示されるとおり、算出された超音波接合領域の面積が最適範囲から外れた場合、次の電極タブの接合条件は制御され、算出される超音波接合領域の面積は最適範囲に維持される。接合条件が制御されることにより、超音波接合のエネルギーが制御される。
【0074】
なお、本実施の形態では、超音波接合直後の電極タブの温度分布を測定した。しかしながら、第2および第3の実施の形態で述べたとおり、外部からエネルギーを加えることにより発熱した電極タブの温度分布を測定することもできる。この場合、超音波接合装置600は、電源400またはヒータ500をさらに備える。
【0075】
以上のとおり、説明された本実施の形態は、第1〜第3の実施の形態における効果に加えて、以下の効果を奏する。
【0076】
本実施の形態の超音波接合装置は、接合条件にしたがって電極タブを超音波接合する超音波接合部と、超音波接合された電極タブの温度分布を測定するサーモカメラと、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する算出部と、算出される超音波接合領域に基づいて、次の電極タブを超音波接合する際の接合条件を制御する制御部と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブの検査結果を接合条件にフィードバックすることができる。その結果、最適な接合条件の超音波接合を維持することができる。
【0077】
本実施の形態の超音波接合装置は、超音波接合領域の大きさが最適範囲から外れるか否かを判定する第2判定部をさらに有し、超音波接合領域の大きさが最適範囲から外れる場合、制御部は、次の電極タブの超音波接合領域が最適範囲に収まるように接合条件を調整する。したがって、接合に関する諸条件(たとえば、材料、設備、および環境など)に変化があり、当初設定した接合条件が最適条件から外れた場合でも、追従して最適接合状態を維持することができる。
【0078】
接合条件は、電極タブを超音波接合する際の接合時間である。したがって、接合条件を容易に調整することができる。
【0079】
接合条件は、電極タブを超音波接合する際のホーンの振動振幅である。したがって、接合条件を容易に調整することができる。
【0080】
本実施の形態の超音波接合方法は、超音波接合された電極タブの温度分布を測定する段階と、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する段階と、算出される超音波接合領域に基づいて、次の電極タブを超音波接合する際の接合条件を制御する段階と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブの検査結果を接合条件にフィードバックすることができる。その結果、最適な接合条件の超音波接合を維持することができる。
【0081】
以上のとおり、本実施の形態において、本発明の超音波接合検査装置および超音波接合検査方法ならびにこれらを用いた超音波接合装置および超音波接合方法を説明した。しかしながら、本発明は、その技術思想の範囲内において当業者が適宜に追加、変形、省略することができることはいうまでもない。
【0082】
たとえば、第1〜第4の実施の形態では、サーモカメラにより電極タブの温度分布を測定した。しかしながら、熱電対といった一般的な温度センサを用いて電極タブの温度分布を離散的に測定することもできる。また、電極タブの一箇所の温度を測定することにより、簡易的に超音波接合の良否を判断することもできる。
【図面の簡単な説明】
【0083】
【図1】本発明の第1の実施の形態における超音波接合検査装置の概略構成を示す図である。
【図2】図1に示す超音波接合検査装置の処理部300の概略構成を示すブロック図である。
【図3】図1に示す超音波接合検査装置による超音波接合検査方法を示すフローチャートである。
【図4】図4(A)は、本実施の形態における電極タブの超音波接合を説明するための図であり、図4(B)は、サーモカメラによって測定される電極タブの温度分布のサーモグラフィを示す図である。
【図5】図5(A)は、本発明の第2の実施の形態における超音波接合検査装置の概略構成を示す図であり、図5(B)は、超音波接合領域が未接合領域よりも高い温度を有する電極タブを示す模式図である。
【図6】図6(A)は、本発明の第3の実施の形態における超音波接合検査装置の概略構成を示す図であり、図6(B)は、超音波接合領域が未接合領域よりも高い温度を有する電極タブを示す模式図である。
【図7】本発明の第4の実施の形態における超音波接合装置の概略構成を示す図である。
【図8】図7に示す超音波接合装置による超音波接合方法を示すフローチャートである。
【図9】図7に示す超音波接合装置により連続的に超音波接合される複数の電極タブの面積および接合エネルギーを説明するための図である。
【符号の説明】
【0084】
100 超音波接合検査装置、
200 サーモカメラ、
300 処理部、
400 電源、
500 ヒータ、
600 超音波接合装置、
700 超音波接合部、
800 制御部。
【技術分野】
【0001】
本発明は、超音波接合検査装置、超音波接合検査方法、超音波接合装置、および超音波接合方法に関する。
【背景技術】
【0002】
電気自動車およびハイブリッド電気自動車のモータ駆動用電源として、リチウムイオン電池およびニッケル水素電池などの二次電池の開発が盛んである。発電要素を外装部材内に封止した扁平形状の単電池を複数積層するとともに電気的に接続して構成される組電池では、隣接する複数の単電池の外装部材から導出される電極タブが、超音波接合法によって相互に接合されている。
【0003】
超音波接合された電極タブの接合状態を検査する方法としては、相互に接合された電極タブを引き剥がす方向に所定の力を作用させ、電極タブが破断するか否かを判定することにより電極タブの接合強度を検査する方法が知られている。しかしながら、電極タブが破断するか否かを判定する機械的な検査方法では、電極タブに力を加える際の電極タブの変形および電極タブの金属疲労(荷重印加履歴)などにより、電極タブの接合強度が劣化するおそれがある。したがって、検査後の電極タブ(単電池)は破棄されなければならず、電極タブは抜き取り検査されるのが現状である。
【0004】
なお、下記の特許文献1には、超音波接合時における超音波振動の振幅を測定することにより、ワークの接合状態を代替的に検知する方法が開示されている。
【特許文献1】特開平06−099289号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、上記の問題を解決するためになされたものである。したがって、本発明の目的は、電極タブに力を加えることなく超音波接合状態を検査することができる超音波接合検査装置および超音波接合検査方法ならびにこれらを用いた超音波接合装置および超音波接合方法を提供することである。
【課題を解決するための手段】
【0006】
本発明の上記目的は、下記の手段によって達成される。
【0007】
本発明の超音波接合検査装置は、超音波接合されたワークの温度分布を測定する温度測定手段と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、を有することを特徴とする。
【0008】
本発明の超音波接合検査方法は、超音波接合されたワークの温度分布を測定する段階と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、を有することを特徴とする。
【0009】
本発明の超音波接合装置は、接合条件にしたがってワークを超音波接合する超音波接合手段と、前記超音波接合されたワークの温度分布を測定する温度測定手段と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する制御手段と、を有することを特徴とする。
【0010】
本発明の超音波接合方法は、超音波接合されたワークの温度分布を測定する段階と、前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する段階と、を有することを特徴とする。
【発明の効果】
【0011】
本発明の超音波接合検査装置および超音波接合検査方法によれば、超音波接合されたワークの温度分布から当該ワークの超音波接合領域を算出することができるため、ワークに力を加えることなく、接合状態を検査することができる。したがって、検査後のワークを破棄する必要がなく、全てのワークの接合状態を検査することができる。
【0012】
また、本発明の超音波接合装置および超音波接合方法によれば、超音波接合されたワークの温度分布から当該ワークの超音波接合領域を算出することができるため、上記の効果に加えて、ワークの検査結果を接合条件にフィードバックすることができる。したがって、最適な接合条件での超音波接合を維持することができる。
【発明を実施するための最良の形態】
【0013】
以下、添付の図面を参照して本発明の実施の形態を詳細に説明する。なお、図中、同様の部材には同一の符号を用いた。
【0014】
(第1の実施の形態)
図1は、本発明の第1の実施の形態における超音波接合検査装置の概略構成を示す図である。図1に示されるとおり、本実施の形態の超音波接合検査装置100は、サーモカメラ200および処理部300を備える。
【0015】
サーモカメラ200は、温度測定手段として、超音波接合された電極タブ900の温度分布を測定するものである。サーモカメラ200は、超音波接合された一対の電極タブ900のうち下側電極タブ900bに対向するように配置され、電極タブ900の温度分布を撮像する。サーモカメラ自体は一般的なサーモカメラであるため、詳細な説明は省略する。また、サーモカメラ200で取得された画像情報は、処理部300に送信される。
【0016】
処理部300は、測定される電極タブ900の温度分布に基づいて、電極タブ900の超音波接合領域を算出するものである。処理部300は、サーモカメラ200から送信される画像情報を受信して、画像情報における所定温度以上の画素数を計算することにより、電極タブ900における超音波接合領域の面積を算出する。処理部300は、たとえば、一般的なコンピュータである。
【0017】
次に、図2を参照して、本実施の形態の処理部300について詳細に説明する。図2は、本実施の形態における処理部300の概略構成を示すブロック図である。図2に示されるとおり、本実施の形態の処理部300は、CPU310、RAM320、ROM330、ハードディスク340、入力部350、表示部360、およびインタフェース370を有する。これらの各部は、バスを介して相互に接続されている。
【0018】
CPU310は、サーモカメラ200で取得される画像情報に対して種々の演算を実行するものである。CPU310は、算出部(算出手段)、第1判定部(第1の判定手段)、および判断部(判断手段)として機能する。
【0019】
ここで、算出部は、画像情報における所定温度以上の画素数を計算することにより、超音波接合領域の面積を算出するものである。第1判定部は、算出される超音波接合領域の面積が下限値未満か否かを判定するものである。判断部は、超音波接合領域の面積が下限値未満の場合、電極タブが接合不良であると判断するものである。なお、各部の具体的な処理内容については、後述する。
【0020】
RAM320は、上述した画像情報を一時的に記憶するものであり、ROM330は、制御プログラムおよびパラメータなどを予め記憶するものである。
【0021】
ハードディスク340は、複数の電極タブに対してそれぞれ算出される超音波接合領域の面積を、対応する電極タブの接合情報とともに記憶する記憶手段として機能する。また、ハードディスク340は、画像情報における所定温度以上の画素数を計算することにより、超音波接合領域の面積を算出する算出プログラム、算出される超音波接合領域の面積が下限値未満か否かを判定する判定プログラム、および超音波接合領域の面積が下限値未満の場合、電極タブが接合不良であると判断する判断プログラムを格納する。
【0022】
入力部350は、たとえば、キーボード、タッチパネル、およびマウスなどのポインティングデバイスであり、表示部360は、たとえば、液晶ディスプレイおよびCRTディスプレイなどである。
【0023】
インタフェース370は、サーモカメラ200から送信される画像信号を受信する。
【0024】
以上のとおり、構成される本実施の形態における超音波接合検査装置では、超音波接合された電極タブの温度分布が測定され、測定される電極タブの温度分布に基づいて、当該電極タブの超音波接合領域の面積が算出される。そして、算出される超音波接合領域の面積に基づいて、電極タブの超音波接合の良否が判断される。以下、本実施の形態における超音波接合検査方法について詳細に説明する。
【0025】
図3は、本実施の形態の超音波接合検査方法を示すフローチャートである。本実施の形態では、超音波接合時の摩擦熱により発熱している超音波接合直後の電極タブの温度分布が測定され、測定結果に基づいて超音波接合の良否が判断される。より具体的には、超音波接合直後の超音波接合領域は未接合領域よりも高い温度を有しており、サーモカメラにより超音波接合領域に対応する高温領域の面積が算出され、当該面積から超音波接合の接合強度が十分か否か、すなわち、超音波接合の良否が判断される。
【0026】
図3に示されるとおり、本実施の形態の超音波接合検査方法では、まず、超音波接合が終了したか否かが判断される(ステップS101)。超音波接合が終了していない場合(ステップS101:NO)、超音波接合が終了するまで待機する。一方、超音波接合が終了した場合(ステップS101:YES)、超音波接合の終了時点から所定時間が経過したか否かが判断される(ステップS102)。
【0027】
所定時間が経過していない場合(ステップS102:NO)、所定時間が経過するまで待機する。一方、所定時間が経過した場合(ステップS102:YES)、電極タブの温度分布をサーモカメラにて撮像し、画像情報が取得される(ステップS103)。上述したとおり、超音波接合直後の電極タブは、超音波接合時の摩擦熱により超音波接合領域が未接合領域よりも高い温度を有している。
【0028】
ここで、図4(A)は、本実施の形態における電極タブの超音波接合を説明するための図である。図4(A)に示されるとおり、本実施の形態では、重ね合わされた一組の電極タブ900がホーン710とアンビル720とにより挟み込まれ、所定の加圧力を与えられながら、ホーン710が超音波振動により往復直線運動することで、電極タブ900が超音波接合される。より具体的には、本実施の形態のホーン710およびアンビル720はそれぞれ複数の突起部711,721を有しており、突起部711,721に対応する電極タブ900の領域が超音波接合される。
【0029】
図4(B)は、サーモカメラによって測定される電極タブの温度分布のサーモグラフィを示す図である。図4(B)に示されるとおり、本実施の形態の超音波接合直後の電極タブは、複数の突起部に対応する超音波接合領域(図の黒色部分)910が未接合領域920よりも高い温度を有している。なお、超音波接合される上側電極タブ900aと下側電極タブ900bとの間に油などが介在して電極タブ900が摩擦されない場合には、図4(B)に示す図とは異なり、全体的に温度が低い画像情報が得られる。
【0030】
次に、画像情報における所定温度以上の画素数が計算され(ステップS104)、画像情報が格納される(ステップS105)。本実施の形態では、未接合領域よりも温度の高い超音波接合領域の面積が算出されるように所定温度が設定され、当該温度以上の画素数が計算されることにより、超音波接合領域の面積が算出される。また、画素数が算出された画像情報は、別途に入力される接合情報とともにハードディスク340に格納される。なお、接合情報とは、画像情報が取得された電極タブの表面粗さ、超音波接合時の接合条件、および超音波接合時の環境(たとえば、湿度)などである。
【0031】
次に、算出された画素数が下限値未満か否かが判断される(ステップS106)。言い換えれば、電極タブの超音波接合領域の面積が、必要な接合強度に対応する下限面積未満か否かが判断される。本実施の形態では、予め測定される超音波接合が良好な電極タブの温度分布に基づいて、上記の下限値が設定される。算出された画素数が下限値未満の場合(ステップS106:YES)、接合強度不足、すなわち超音波接合が不良であると判断され(ステップS107)、処理が終了される。なお、判断結果は、たとえば、表示部360に表示される。
【0032】
一方、算出された画素数が下限値以上の場合(ステップS106:NO)、当該画素数が上限値以下か否かが判断される(ステップS108)。ここで、電極タブに必要以上に大きな摩擦力がかる場合、超音波接合領域に対応する高温領域が大きくなる一方で、電極タブが劣化してしまうおそれがある。したがって、本実施の形態では、接合強度を判定するための下限値(下限面積)に加えて、電極タブの劣化を判定するための上限値(上限面積)が設定されることが好ましい。
【0033】
算出された画素数が上限値以上の場合(ステップS108:YES)、超音波接合が不良であると判断され(ステップS107)、処理が終了される。一方、算出された画素数が上限値未満の場合(ステップS108:NO)、超音波接合が良好であると判断され(ステップS109)、処理が終了される。
【0034】
以上のとおり、図3に示すフローチャートの処理によれば、超音波接合直後の電極タブの超音波接合領域と未接合領域との温度差を利用して、電極タブにおける超音波接合領域の面積が算出される。そして、算出される面積に基づいて、電極タブの接合強度、すなわち超音波接合の良否が判断される。より具体的には、超音波接合領域の面積が上限値以上および下限値未満の場合、超音波接合が不良であると判断される。
【0035】
なお、本実施の形態の超音波接合検査装置では、電極タブにおける超音波接合領域の面積を算出した。しかしながら、画像情報から超音波接合領域の分布形状(分布状況)を算出することもできる。このような構成にすれば、超音波接合の接合強度のみならず、電極タブの所望の領域が均一に超音波接合されているか否かを判断することができる。その結果、電極タブの接合品質がより向上される。
【0036】
また、本実施の形態では、所定温度以上の画素数を計算することにより超音波接合領域の面積を算出した。しかしながら、所定温度未満の画素数を計算して未接合領域を計算し、全体の面積からの差分を求めることにより、超音波接合領域の面積を算出することもできる。
【0037】
以上のとおり、説明された本実施の形態は、以下の効果を奏する。
【0038】
本実施の形態の超音波接合検査装置は、超音波接合された電極タブの温度分布を測定するサーモカメラと、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する算出部と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブに力を加えることなく、接合状態を検査することができる。その結果、全ての電極タブの接合状態を検査することができる。
【0039】
また、超音波接合領域の面積が直接的に算出されるため、ホーンの振動状態をモニタするといった間接的な接合強度判定方法と比較して、誤差要因が少ない。さらに、ホーンの振動状態は接合時の摩擦熱および装置の発熱などに振動状態が変化し易いことと比較して、本実施の形態の超音波接合装置は、温度をモニタするため簡単に補正することが可能である。
【0040】
算出部は、サーモカメラによって取得される画像情報、電極タブの超音波接合領域を算出する。したがって、電極タブの温度分布から、電極タブにおける超音波接合領域の大きさおよび分布形状などを算出することができる。
【0041】
算出部は、画像情報における所定温度以上の画素数を計算することにより、超音波接合領域の大きさを算出する。したがって、超音波接合領域の面積を容易に算出することができる。
【0042】
本実施の形態の超音波接合検査装置は、超音波接合領域の面積が下限値未満か否かを判定する第1判定部と、超音波接合領域の面積が下限値未満の場合、電極タブが接合不良であると判断する判断部と、をさらに有する。したがって、超音波接合領域の面積から超音波接合の強度が判定され、超音波接合の良否を判断することができる。
【0043】
サーモカメラは、超音波接合時の摩擦熱により超音波接合領域が未接合領域よりも高い温度を有している超音波接合直後の電極タブの温度分布を測定する。したがって、外部からエネルギーを加えることなく、電極タブの温度分布を測定することができる。
【0044】
本実施の形態の超音波接合検査装置は、複数の電極タブに対してそれぞれ算出される超音波接合領域を、対応する電極タブの接合情報とともに記憶する記憶部をさらに有する。したがって、検査結果を累積することができ、超音波接合結果を統計処理して傾向を把握することができる。また、材料のロッド変化および他の誤差要因の変化に対して、検査結果を超音波接合にフィードバックすることができる。
【0045】
本実施の形態の超音波接合検査方法は、超音波接合された電極タブの温度分布を測定する段階と、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する段階と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブに力を加えることなく、接合状態を検査することができる。したがって、全ての電極タブの接合状態を検査することができる。
【0046】
(第2の実施の形態)
第1の実施の形態では、超音波接合時の摩擦により発熱した超音波接合直後の電極タブの温度分布を測定する場合について述べた。本実施の形態では、超音波接合済みの常温状態の電極タブに外部からエネルギーを加えることにより電極タブを発熱させ、発熱させた電極タブの温度分布を測定する場合について述べる。
【0047】
図5(A)は、本発明の第2の実施の形態における超音波接合検査装置の概略構成を示す図である。図5(A)に示されるとおり、本実施の形態の超音波接合検査装置100は、サーモカメラ200、処理部300、および電源400を備える。電源400を除いては、サーモカメラ200および処理部300は、第1の実施の形態の場合と同様であるため、説明は省略する。
【0048】
電源400は、通電手段として、通電により電極タブ900でジュール熱を発生させるものである。電源400は、超音波接合されている一対の電極タブ900を構成する上側電極タブ900aおよび下側電極タブ900bにそれぞれ接続され、電極タブ900に電圧を印加する。また、電源400は、処理部300に電気的に接続されていて、処理部300からの指令に応じて、電圧を印加することができる。
【0049】
以上のとおり構成される本実施の形態の超音波接合検査装置100によれば、まず、処理部300からの指令に基づいて電源400が電極タブ900に電圧を印加することにより、上側電極タブ900aと下側電極タブ900bとが固相接合されている超音波接合領域910に電流が流れ、超音波接合領域910でジュール熱が発生する(図5(B)参照)。超音波接合領域910で発生するジュール熱により超音波接合領域910が未接合領域よりも高い温度を有している電極タブ900の温度分布がサーモカメラにより測定され、測定結果に基づいて、超音波接合の良否が判断される。
【0050】
なお、超音波接合領域910でジュール熱が発生する状態が長時間続く場合、電極タブ900全体がほぼ同一の温度になってしまうため、超音波接合領域910を算出することができない。したがって、通電から所定時間経過後の電極タブ900の温度分布を測定する。また、通電により電極タブ900が加熱されることを除いては、第1の実施の形態と同様であるため、本実施の形態の超音波接合方法についての詳細な説明は省略する。
【0051】
以上のとおり、説明された本実施の形態は、第1の実施の形態における効果に加えて、以下の効果を奏する。
【0052】
本実施の形態の超音波接合検査装置は、通電により超音波接合領域でジュール熱を発生させる電源をさらに有し、サーモカメラは、超音波接合領域でのジュール熱により超音波接合領域が未接合領域よりも高い温度を有している電極タブの温度分布を測定する。したがって、超音波接合直後の電極タブに限定されず、自由なタイミングで電極タブの温度分布が測定され、超音波接合領域を算出することができる。
【0053】
(第3の実施の形態)
本実施の形態は、超音波接合済みの常温状態の電極タブに輻射熱を加えることにより、電極タブを発熱させ、発熱させた電極タブの温度分布を測定する実施の形態である。
【0054】
図6(A)は、本発明の第3の実施の形態における超音波接合検査装置の概略構成を示す図である。図6(A)に示されるとおり、本実施の形態の超音波接合検査装置100は、サーモカメラ200、処理部300、およびヒータ500を備える。ヒータ500を除いては、サーモカメラ200および処理部300は、第1の実施の形態の場合と同様であるため、説明は省略する。
【0055】
ヒータ500は、加熱手段として、超音波接合される一対の電極タブ900のうち上側電極タブ900aを輻射熱により加熱するものである。ヒータ500は、電極タブ900を基準としてサーモカメラ200の反対側に配置され、サーモカメラ200と対向する下側電極タブ900bと接合されている上側電極タブ900aに輻射熱を供給する。また、ヒータ500は、処理部300に電気的に接続されていて、処理部300からの指令に応じて、輻射熱を供給することができる。
【0056】
以上のとおり構成される本実施の形態の超音波接合検査装置100によれば、まず、処理部300からの指令に基づいてヒータ500が電極タブ900に輻射熱を供給することにより、当該ヒータ500に対向する上側電極タブ900aが加熱される。上側電極タブ900aが加熱される場合、上側電極タブ900aと下側電極タブ900bとが固相接合されている超音波接合領域910は、上側電極タブ900aと下側電極タブ900bとの間に空気層が介在する未接合領域よりも短時間で熱が伝達される。したがって、上側電極タブ900aが加熱される場合、上側電極タブ900aからの熱伝導により下側電極タブ900bの超音波接合領域910が未接合領域よりも高い温度を有する(図6(B)参照)。超音波接合領域910が未接合領域よりも高い温度を有している下側電極タブ900bの温度分布がサーモカメラにより測定され、測定結果に基づいて、超音波接合の良否が判断される。
【0057】
なお、上側電極タブ900aに輻射熱が長時間供給される場合、電極タブ900全体がほぼ同一の温度になってしまうため、超音波接合領域910を算出することができない。したがって、輻射開始から所定時間経過後の電極タブ900の温度分布を測定する。また、輻射熱により電極タブ900が加熱されることを除いては、第1の実施の形態と同様であるため、本実施の形態の超音波接合方法についての詳細な説明は省略する。
【0058】
以上のとおり、説明された本実施の形態は、第1および第2の実施の形態における効果に加えて、以下の効果を奏する。
【0059】
本実施の形態の超音波接合検査装置は、電極タブを構成する上側電極タブを輻射熱により加熱するヒータをさらに有し、サーモカメラは、上側電極タブからの熱伝導により超音波接合領域が未接合領域よりも高い温度を有している下側電極タブの温度分布を測定する。したがって、超音波接合直後の電極タブに限定されず、自由なタイミングで電極タブの温度分布が測定され、超音波接合領域を算出することができる。さらに、大掛かりな設備を必要としない。
【0060】
(第4の実施の形態)
本実施の形態は、上記第1〜第3の実施の形態の超音波接合検査装置が組み込まれた超音波接合装置の実施の形態である。
【0061】
図7は、本発明の第4の実施の形態における超音波接合装置の概略構成を示す図である。図7に示されるとおり、本実施の形態の超音波接合装置600は、サーモカメラ200、処理部300、超音波接合部700、および制御部800を備える。超音波接合部700および制御部800を除いては、サーモカメラ200および処理部300は、第1の実施の形態の場合と同様であるため、説明は省略する。
【0062】
超音波接合部700は、超音波接合手段として、接合条件にしたがって電極タブ900を超音波接合するものである。超音波接合部700は、重ね合わされた一組の電極タブ900に超音波振動を加えることにより電極タブ900を超音波接合する。また、超音波接合部700は、超音波振動で往復直線運動されつつ電極タブ900を加圧するホーン710と、ホーン710によって加圧される電極タブを支持するアンビル720とを有する。また、本実施の形態において、ホーン710およびアンビル720は、それぞれ複数の突起部711,721を備える。
【0063】
制御部800は、超音波接合部700を制御するものである。本実施の形態において、制御部800は、処理部300で算出される超音波接合領域に基づいて、次の電極タブを超音波接合する際の接合条件を制御する。
【0064】
以上のとおり構成される本実施の形態の超音波接合装置600によれば、超音波接合部700によって超音波接合された電極タブ900の温度分布が測定され、測定される温度分布に基づいて、超音波接合領域の面積が算出される。そして、算出される超音波接合領域の面積に基づいて、次に超音波接合される電極タブの接合条件が制御される。以下、本実施の形態における超音波接合方法について詳細に説明する。
【0065】
図8は、本実施の形態における超音波接合方法を示すフローチャートである。本実施の形態の超音波接合方法では、まず、電極タブが超音波接合される(ステップS201)。本実施の形態では、予め設定されている接合条件にしたがって、超音波接合部が制御され、電極タブが超音波接合される。
【0066】
次に、超音波接合の終了時点から所定の時間が経過したか否かが判断される(ステップS202)。所定時間が経過していない場合(ステップS202:NO)、所定時間が経過するまで待機する。一方、所定時間が経過した場合(ステップS202:YES)、電極タブの温度分布をサーモカメラにて測定し、温度分布を示す画像情報が取得される(ステップS203)。
【0067】
次に、画像情報における所定温度以上の画素数が計算され(ステップS204)、画像情報が格納される(ステップS205)。本実施の形態では、未接合領域よりも温度の高い超音波接合領域の面積が算出されるように所定温度が設定され、当該温度以上の画素数が計算されることにより、超音波接合領域の面積が算出される。また、画素数が計算された画像情報は接合情報とともにハードディスク340に格納される。
【0068】
そして、算出された画素数が下限値未満か否かが判断される(ステップS206)。算出された画素数が下限値未満の場合(ステップS206:YES)、超音波接合が不良であると判断され(ステップS207)、処理が終了される。一方、算出された画素数が下限値以上の場合(ステップS206:NO)、当該画素数が上限値以下か否かが判断される(ステップS208)。画素数が上限値以上の場合(ステップS208:YES)、超音波接合が不良であると判断され(ステップS207)、処理が終了される。一方、算出された画素数が上限値未満の場合(ステップS208:NO)、超音波接合が良好であると判断され(ステップS209)、ステップS210以下の処理に移行する。
【0069】
そして、ステップS210に示す処理では、算出された画素数が最適な接合状態を示す最適範囲の下限値未満か否かが判断される(ステップS210)。言い換えれば、電極タブにおける超音波接合領域の面積が最適な接合面積の下限面積未満か否かが判断される。なお、CPU310が、超音波接合領域の大きさが最適範囲から外れるか否かを判定する第2判定部(第2の判定手段)として機能する。
【0070】
算出された画素数が最適範囲の下限値未満の場合(ステップS210:YES)、次に超音波接合する電極タブの超音波接合領域が大きくなるように接合条件が変更され(ステップS211)、処理が終了される。より具体的には、予め設定されている関係式にしたがって、超音波接合における接合時間、振動振幅、加圧力、および振動周波数などが大きくなる向きに接合条件が調整される。
【0071】
一方、算出された画素数が最適範囲の下限値以上の場合(ステップS210:NO)、当該画素数が最適範囲の上限値以上か否かが判断される(ステップS212)。画素数が最適範囲の上限値以上の場合(ステップS212:YES)、次に超音波接合する電極タブの超音波接合領域が小さくなるように接合条件が変更され(ステップS211)、処理が終了される。より具体的には、予め設定されている関係式にしたがって、超音波接合における接合時間、振動振幅、加圧力、および振動周波数などが小さくなる向きに接合条件が調整される。一方、算出された画素数が最適範囲の上限値未満の場合(ステップS212:NO)、接合条件を変更することなく処理が終了される。
【0072】
以上のとおり、図8に示すフローチャートの処理によれば、超音波接合領域の面積が上限値以上および下限値未満の場合、超音波接合が不良であると判断される。さらに、超音波接合領域の面積が最適範囲から外れた場合、接合条件が制御され、次の電極タブの超音波接合領域の面積が最適範囲に収まるように調整される。より具体的には、超音接合領域の面積が最適範囲の下限値未満の場合、次の電極タブの超音波接合領域が大きくなるように接合条件が制御され、超音接合領域の面積が最適範囲の上限値以上の場合、次の電極タブの超音波接合領域が小さくなるように接合条件が制御される。
【0073】
図9は、本実施の形態の超音波接合装置により連続的に超音波接合される複数の電極タブの面積および接合エネルギーを説明するための図である。縦軸は超音波接合領域の面積であり、横軸は連続的に超音波接合される電極タブの番号である。図9に示されるとおり、算出された超音波接合領域の面積が最適範囲から外れた場合、次の電極タブの接合条件は制御され、算出される超音波接合領域の面積は最適範囲に維持される。接合条件が制御されることにより、超音波接合のエネルギーが制御される。
【0074】
なお、本実施の形態では、超音波接合直後の電極タブの温度分布を測定した。しかしながら、第2および第3の実施の形態で述べたとおり、外部からエネルギーを加えることにより発熱した電極タブの温度分布を測定することもできる。この場合、超音波接合装置600は、電源400またはヒータ500をさらに備える。
【0075】
以上のとおり、説明された本実施の形態は、第1〜第3の実施の形態における効果に加えて、以下の効果を奏する。
【0076】
本実施の形態の超音波接合装置は、接合条件にしたがって電極タブを超音波接合する超音波接合部と、超音波接合された電極タブの温度分布を測定するサーモカメラと、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する算出部と、算出される超音波接合領域に基づいて、次の電極タブを超音波接合する際の接合条件を制御する制御部と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブの検査結果を接合条件にフィードバックすることができる。その結果、最適な接合条件の超音波接合を維持することができる。
【0077】
本実施の形態の超音波接合装置は、超音波接合領域の大きさが最適範囲から外れるか否かを判定する第2判定部をさらに有し、超音波接合領域の大きさが最適範囲から外れる場合、制御部は、次の電極タブの超音波接合領域が最適範囲に収まるように接合条件を調整する。したがって、接合に関する諸条件(たとえば、材料、設備、および環境など)に変化があり、当初設定した接合条件が最適条件から外れた場合でも、追従して最適接合状態を維持することができる。
【0078】
接合条件は、電極タブを超音波接合する際の接合時間である。したがって、接合条件を容易に調整することができる。
【0079】
接合条件は、電極タブを超音波接合する際のホーンの振動振幅である。したがって、接合条件を容易に調整することができる。
【0080】
本実施の形態の超音波接合方法は、超音波接合された電極タブの温度分布を測定する段階と、温度分布が測定される電極タブの未接合領域と超音波接合領域との温度差を利用して、当該電極タブの超音波接合領域を算出する段階と、算出される超音波接合領域に基づいて、次の電極タブを超音波接合する際の接合条件を制御する段階と、を有する。したがって、超音波接合された電極タブの温度分布から当該電極タブの超音波接合領域を算出することができるため、電極タブの検査結果を接合条件にフィードバックすることができる。その結果、最適な接合条件の超音波接合を維持することができる。
【0081】
以上のとおり、本実施の形態において、本発明の超音波接合検査装置および超音波接合検査方法ならびにこれらを用いた超音波接合装置および超音波接合方法を説明した。しかしながら、本発明は、その技術思想の範囲内において当業者が適宜に追加、変形、省略することができることはいうまでもない。
【0082】
たとえば、第1〜第4の実施の形態では、サーモカメラにより電極タブの温度分布を測定した。しかしながら、熱電対といった一般的な温度センサを用いて電極タブの温度分布を離散的に測定することもできる。また、電極タブの一箇所の温度を測定することにより、簡易的に超音波接合の良否を判断することもできる。
【図面の簡単な説明】
【0083】
【図1】本発明の第1の実施の形態における超音波接合検査装置の概略構成を示す図である。
【図2】図1に示す超音波接合検査装置の処理部300の概略構成を示すブロック図である。
【図3】図1に示す超音波接合検査装置による超音波接合検査方法を示すフローチャートである。
【図4】図4(A)は、本実施の形態における電極タブの超音波接合を説明するための図であり、図4(B)は、サーモカメラによって測定される電極タブの温度分布のサーモグラフィを示す図である。
【図5】図5(A)は、本発明の第2の実施の形態における超音波接合検査装置の概略構成を示す図であり、図5(B)は、超音波接合領域が未接合領域よりも高い温度を有する電極タブを示す模式図である。
【図6】図6(A)は、本発明の第3の実施の形態における超音波接合検査装置の概略構成を示す図であり、図6(B)は、超音波接合領域が未接合領域よりも高い温度を有する電極タブを示す模式図である。
【図7】本発明の第4の実施の形態における超音波接合装置の概略構成を示す図である。
【図8】図7に示す超音波接合装置による超音波接合方法を示すフローチャートである。
【図9】図7に示す超音波接合装置により連続的に超音波接合される複数の電極タブの面積および接合エネルギーを説明するための図である。
【符号の説明】
【0084】
100 超音波接合検査装置、
200 サーモカメラ、
300 処理部、
400 電源、
500 ヒータ、
600 超音波接合装置、
700 超音波接合部、
800 制御部。
【特許請求の範囲】
【請求項1】
超音波接合されたワークの温度分布を測定する温度測定手段と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、を有することを特徴とする超音波接合検査装置。
【請求項2】
前記温度測定手段は、前記ワークの温度分布を撮像可能なサーモカメラであって、
前記算出手段は、前記サーモカメラによって取得される画像情報から、当該ワークの超音波接合領域を算出することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項3】
前記算出手段は、前記画像情報における所定温度以上の画素数を計算することにより、前記超音波接合領域の大きさを算出することを特徴とする請求項2に記載の超音波接合検査装置。
【請求項4】
前記超音波接合領域の大きさが下限値未満か否かを判定する判定手段と、
前記超音波接合領域の大きさが下限値未満の場合、前記ワークが接合不良であると判断する判断手段と、をさらに有することを特徴とする請求項3に記載の超音波接合検査装置。
【請求項5】
前記温度測定手段は、超音波接合時の摩擦熱により超音波接合領域が未接合領域よりも高い温度を有している超音波接合直後のワークの温度分布を測定することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項6】
通電により前記超音波接合領域でジュール熱を発生させる通電手段をさらに有し、
前記温度測定手段は、前記超音波接合領域でのジュール熱により超音波接合領域が未接合領域よりも高い温度を有しているワークの温度分布を測定することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項7】
前記ワークを構成する一の部材を輻射熱により加熱する加熱手段をさらに有し、
前記温度測定手段は、前記一の部材からの熱伝導により超音波接合領域が未接合領域よりも高い温度を有している前記ワークの他の部材の温度分布を測定することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項8】
複数のワークに対してそれぞれ算出される超音波接合領域を、対応するワークの接合情報とともに記憶する記憶手段をさらに有することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項9】
接合条件にしたがってワークを超音波接合する超音波接合手段と、
前記超音波接合されたワークの温度分布を測定する温度測定手段と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、
前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する制御手段と、を有することを特徴とする超音波接合装置。
【請求項10】
前記温度測定手段は、前記ワークの温度分布を撮像可能なサーモカメラであって、
前記算出手段は、前記画像情報における所定温度以上の画素数を計算することにより、前記超音波接合領域の大きさを算出することを特徴とする請求項9に記載の超音波接合装置。
【請求項11】
前記超音波接合領域の大きさが下限値未満か否かを判定する第1の判定手段と、
前記超音波接合領域の大きさが下限値未満の場合、前記ワークが接合不良であると判断する判断手段と、をさらに有することを特徴とする請求項10に記載の超音波接合検査装置。
【請求項12】
前記超音波接合領域の大きさが最適範囲から外れるか否かを判定する第2の判定手段をさらに有し、
前記超音波接合領域の大きさが最適範囲から外れる場合、前記制御手段は、次のワークの超音波接合領域が最適範囲に収まるように接合条件を調整することを特徴とする請求項10に記載の超音波接合装置。
【請求項13】
前記接合条件は、前記超音波接合手段が前記ワークを超音波接合する際の接合時間であることを特徴とする請求項9に記載の超音波接合装置。
【請求項14】
前記接合条件は、前記超音波接合手段が前記ワークを超音波接合する際の振動振幅であることを特徴とする請求項9に記載の超音波接合装置。
【請求項15】
超音波接合されたワークの温度分布を測定する段階と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、を有することを特徴とする超音波接合検査方法。
【請求項16】
超音波接合されたワークの温度分布を測定する段階と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、
前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する段階と、を有することを特徴とする超音波接合方法。
【請求項1】
超音波接合されたワークの温度分布を測定する温度測定手段と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、を有することを特徴とする超音波接合検査装置。
【請求項2】
前記温度測定手段は、前記ワークの温度分布を撮像可能なサーモカメラであって、
前記算出手段は、前記サーモカメラによって取得される画像情報から、当該ワークの超音波接合領域を算出することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項3】
前記算出手段は、前記画像情報における所定温度以上の画素数を計算することにより、前記超音波接合領域の大きさを算出することを特徴とする請求項2に記載の超音波接合検査装置。
【請求項4】
前記超音波接合領域の大きさが下限値未満か否かを判定する判定手段と、
前記超音波接合領域の大きさが下限値未満の場合、前記ワークが接合不良であると判断する判断手段と、をさらに有することを特徴とする請求項3に記載の超音波接合検査装置。
【請求項5】
前記温度測定手段は、超音波接合時の摩擦熱により超音波接合領域が未接合領域よりも高い温度を有している超音波接合直後のワークの温度分布を測定することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項6】
通電により前記超音波接合領域でジュール熱を発生させる通電手段をさらに有し、
前記温度測定手段は、前記超音波接合領域でのジュール熱により超音波接合領域が未接合領域よりも高い温度を有しているワークの温度分布を測定することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項7】
前記ワークを構成する一の部材を輻射熱により加熱する加熱手段をさらに有し、
前記温度測定手段は、前記一の部材からの熱伝導により超音波接合領域が未接合領域よりも高い温度を有している前記ワークの他の部材の温度分布を測定することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項8】
複数のワークに対してそれぞれ算出される超音波接合領域を、対応するワークの接合情報とともに記憶する記憶手段をさらに有することを特徴とする請求項1に記載の超音波接合検査装置。
【請求項9】
接合条件にしたがってワークを超音波接合する超音波接合手段と、
前記超音波接合されたワークの温度分布を測定する温度測定手段と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する算出手段と、
前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する制御手段と、を有することを特徴とする超音波接合装置。
【請求項10】
前記温度測定手段は、前記ワークの温度分布を撮像可能なサーモカメラであって、
前記算出手段は、前記画像情報における所定温度以上の画素数を計算することにより、前記超音波接合領域の大きさを算出することを特徴とする請求項9に記載の超音波接合装置。
【請求項11】
前記超音波接合領域の大きさが下限値未満か否かを判定する第1の判定手段と、
前記超音波接合領域の大きさが下限値未満の場合、前記ワークが接合不良であると判断する判断手段と、をさらに有することを特徴とする請求項10に記載の超音波接合検査装置。
【請求項12】
前記超音波接合領域の大きさが最適範囲から外れるか否かを判定する第2の判定手段をさらに有し、
前記超音波接合領域の大きさが最適範囲から外れる場合、前記制御手段は、次のワークの超音波接合領域が最適範囲に収まるように接合条件を調整することを特徴とする請求項10に記載の超音波接合装置。
【請求項13】
前記接合条件は、前記超音波接合手段が前記ワークを超音波接合する際の接合時間であることを特徴とする請求項9に記載の超音波接合装置。
【請求項14】
前記接合条件は、前記超音波接合手段が前記ワークを超音波接合する際の振動振幅であることを特徴とする請求項9に記載の超音波接合装置。
【請求項15】
超音波接合されたワークの温度分布を測定する段階と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、を有することを特徴とする超音波接合検査方法。
【請求項16】
超音波接合されたワークの温度分布を測定する段階と、
前記温度分布が測定されるワークの未接合領域と超音波接合領域との温度差を利用して、当該ワークの超音波接合領域を算出する段階と、
前記算出される超音波接合領域に基づいて、次のワークを超音波接合する際の接合条件を制御する段階と、を有することを特徴とする超音波接合方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−145252(P2008−145252A)
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2006−332310(P2006−332310)
【出願日】平成18年12月8日(2006.12.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成18年12月8日(2006.12.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]