
超音波検査方法及び超音波検査装置
【課題】
本発明の課題は、アレイ型超音波センサを用いた超音波検査装置において、検査対象の構成材料の音速や詳細な内部構造が不明確な場合でも、超音波を検査個所に集束して確実な検査を実施することにある。
【解決手段】
検査対象1の下方より検査対象面2へ超音波センサ3から超音波12を集束させ、検査対象1を通して超音波12がアレイ型超音波センサ4の各圧電振動素子に受信されるまでの超音波12の到達時間を各圧電振動素子ごとに制御装置8を利用して計測し、この到達時間を用いてアレイ型超音波センサ4の各圧電振動素子に加える送信信号の時間制御の為の遅延時間を求め、その遅延時間で時間制御した送信信号で各圧電振動素子を駆動して検査対象面2に正確に各圧電振動素子からの超音波を集束させ、またその超音波の反射波を各圧電振動素子で受信して合成し検査結果を表示手段に表示する。
本発明の課題は、アレイ型超音波センサを用いた超音波検査装置において、検査対象の構成材料の音速や詳細な内部構造が不明確な場合でも、超音波を検査個所に集束して確実な検査を実施することにある。
【解決手段】
検査対象1の下方より検査対象面2へ超音波センサ3から超音波12を集束させ、検査対象1を通して超音波12がアレイ型超音波センサ4の各圧電振動素子に受信されるまでの超音波12の到達時間を各圧電振動素子ごとに制御装置8を利用して計測し、この到達時間を用いてアレイ型超音波センサ4の各圧電振動素子に加える送信信号の時間制御の為の遅延時間を求め、その遅延時間で時間制御した送信信号で各圧電振動素子を駆動して検査対象面2に正確に各圧電振動素子からの超音波を集束させ、またその超音波の反射波を各圧電振動素子で受信して合成し検査結果を表示手段に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アレイ型超音波センサを使用して検査対象の内部を非破壊的に検査する超音波検査装置とその超音波検査方法に係わる。
【背景技術】
【0002】
従来のアレイ型超音波センサを用いた超音波検査装置では、超音波を検査対象内部に集束して検査を実施するために、アレイ型超音波センサの各圧電振動素子に送信信号として電圧を印加する際のタイミングを時間的に制御している。この時間制御の際に、アレイ型超音波センサのある圧電振動素子に対する送信信号の印加タイミングから各圧電振動素子毎に送信信号の印加タイミングをずらす時間が遅延時間である。
【0003】
この遅延時間を各圧電振動素子毎に設定するために、従来は、超音波を集束させたい点からアレイ型超音波センサの各圧電振動素子までの幾何学的距離を求め、これを検査対象の材料に依存する超音波の音速で割り、超音波を集束させたい点からアレイ型超音波センサの各圧電振動素子までの超音波の到達時間を求める。
【0004】
1回の超音波検査で使用するアレイ型超音波センサの各圧電振動素子のうち、最も集束させたい点に遠い素子、つまり超音波の到達時間が最も大きい素子を基準として、超音波の到達時間を時間軸上で折り返して遅延時間とする。これにより、集束させたい点に超音波が到達する際に、使用する全ての圧電振動素子から送信された超音波が、同一時刻に検査対象内の集束点に到達して超音波の集束が得られる。
【0005】
検査対象の材質が一つで音響伝達媒質としては単一媒質と見なされる場合は、以上のように集束点とアレイ型超音波センサの各圧電振動素子との距離と検査対象の媒質の音速により、簡単に遅延時間を設定することができる。このように超音波の焦点位置に応じて各圧電振動素子ごとに遅延時間を変えて時間制御を送信信号に加味して送信タイミング、即ち印加タイミングを変化させる。
【0006】
その各圧電振動素子毎に設定される遅延時間を変えれば、超音波の焦点位置も変わる。その焦点位置を変える為に、各圧電振動素子への送信信号に加味する時間制御のための遅延時間を制御回路によって可変とする可変遅延回路を備える超音波検査装置が公知である(例えば、特許文献1参照)。
【0007】
又、検査対象内に超音波を集束させる手段としては、アレイ型超音波センサに限らなければ、圧電振動素子から発せられた超音波を音響レンズで屈折させて焦点に集束させる技術が公知である(例えば、特許文献2参照)。
【0008】
さらに、圧電振動素子と検査対象との間の超音波路程中に置いた音響レンズの位置を圧電振動素子と検査対象との間で変化させることで同一の音響レンズで超音波の検査対象内の焦点位置を変化させることができることも公知である(例えば、特許文献3参照)。
【0009】
一方、検査対象が複数の材質により構成される場合には、式1で示されるスネルの法則で、各媒質での屈折角度を求め、超音波の幾何学的な伝播経路を計算することができる。
【0010】
【数1】

【0011】
ここで、θは超音波の入射角度及び屈折角度、vは超音波の音速、θやvの右下に添えた1,2は媒質番号である。
【0012】
【特許文献1】特開2003−130859号公報
【特許文献2】特開平11−211701号公報
【特許文献3】特開平10−82769号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
しかしながら、スネルの法則で超音波の屈折角度を求め、さらに求めた屈折角度と媒質の厚さから、超音波の幾何学的な伝播経路を求めるためには、検査対象を構成する各材料(各媒質)での超音波の音速と、検査対象の内部構造の寸法が必須である。
【0014】
そのため、新たな検査対象の検査を行うためには、検査対象を構成する全ての材料の音速をそれぞれ調査、あるいは計測し、検査対象の内部構造を調査するためにその断面を切出すなどする必要があった。さらに、特に検査対象の構成材料が薄いものからなる場合、音速を調査するために目的の材料を切出すことも難しく、また、薄いため超音波の音速を評価することも難しかった。これらの要因が、超音波検査における超音波の集束精度低下の原因となっていた。
【0015】
特に、検査対象が半導体であって、その半導体内部のはく離やボイドの検査においては、半導体の裏面側にはハンダボールが配列されており、これが超音波を反射・屈折するため、ハンダボールがない部分は半導体内部での同一平面内の検査が可能であるが、ハンダボール直下の部分については検査できない。そのため、半導体の表面側から入射した超音波により、検査を実施する。しかしながら、半導体の分野はその技術の進歩が著しく、新しい材料の適用がされるたびに、構成材料の全ての音速をそれぞれ調査、あるいは計測し、検査対象の内部構造を調査するためにその断面を切出すなどする必要があった。
【0016】
そのため本発明は、アレイ型超音波センサを用いた超音波検査装置において、検査対象の構成材料の音速や詳細な構造が不明確な場合でも、超音波の集束精度低下を抑制して超音波検査実施可能な超音波検査装置及び検査方法を提供することにある。
【課題を解決するための手段】
【0017】
本発明による超音波検査方法は、アレイ型超音波センサと他の超音波センサとを検査対象を挟んで設置し、前記他の超音波センサから前記検査対象内で集束するように送信した超音波を前記アレイ型超音波センサで受信し、前記他の超音波センサから前記検査対象を通して前記アレイ型超音波センサの各圧電振動素子までの前記超音波の到達時間を計測し、前記到達時間に基づいて超音波送・受信信号の制御に用いる遅延時間を求め、前記遅延時間に基づいて、前記各圧電振動素子へ印加する送信信号の送信タイミングと、前記の各圧電振動素子から出力された受信信号の受信タイミングを制御して前記アレイ型超音波センサから前記検査対象に超音波を送受信して検査対象内での超音波の集束精度低下を抑制しながら検査対象の内部を超音波を用いて非破壊検査することができるようにした。
【0018】
本発明による超音波検査装置は、アレイ型超音波センサと、前記アレイ型超音波センサの各圧電振動素子との間で送信信号と受信信号とを送受する超音波送・受信機と、前記送信信号と受信信号に前記各圧電振動素子ごとに遅延時間を可変して時間制御を加える遅延制御装置と、前記超音波送・受信機と遅延制御装置とを制御する制御装置と、前記受信信号に基づいて得られた情報を表示する表示手段と、を備えた超音波検査装置において、前記アレイ型超音波センサの検査対象を挟んだ反対側の位置に配置された超音波集束型の他の超音波センサと、前記他の超音波センサとの間で送信信号と受信信号とを送受する他の超音波送・受信機と、前記他の超音波センサからの受信信号に基づいて得られた情報を表示する表示手段とを備えることを特徴としている。
【発明の効果】
【0019】
本発明のアレイ型超音波センサを用いた超音波検査装置及び検査方法は、検査対象の材料音速や詳細な内部構造が解らない場合でも、アレイ型超音波センサの最適な遅延時間を設定して検査を実施することが可能である。
【発明を実施するための最良の形態】
【0020】
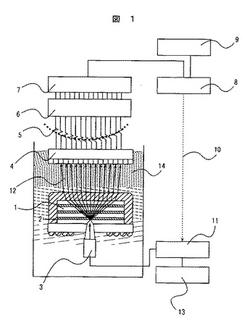
以下、本発明の各実施例を各図に基づいて説明する。図1は本発明の第1の実施の形態を示す図である。まず、図1を用いて遅延時間の設定方法について説明する。検査対象1の内部は多層構造の複雑な構造になっており、数種類の構成材料が上下多層に構成されている。
【0021】
超音波センサ3,アレイ型超音波センサ4及び検査対象1は超音波伝達媒質中(水などを用いる)にある。その超音波伝達媒質は水槽14に貯留されている。この超音波伝達媒質中の検査対象を下方側から超音波センサ3、上方側からアレイ型超音波センサ4で挟む配置で超音波センサ3とアレイ型超音波センサ4とが配置されている。その超音波センサ3としては、超音波を音響的焦点に集束させる機能を有する焦点型(超音波集束型とも言う。)の超音波センサを用いる。
【0022】
アレイ型超音波センサ4は、複数の圧電振動素子を同じ方向(アレイ方向)に並べた構成の素子配列を有するものである。その複数の圧電振動素子の一つ一つに超音波送・受信機6からの送受信線が接続されている。そのため、超音波送・受信機6から複数の圧電振動素子が個別の送信信号を受けて振動し、或いは超音波を受けて振動して電気信号を発して超音波送・受信機6へ個別に受信信号を送れる構成を採用している。
【0023】
その超音波送・受信機6には、遅延制御装置7が接続され、アレイ型超音波センサ4の各圧電振動素子への送信信号やアレイ型超音波センサ4の各圧電振動素子からの受信信号に遅延制御装置7が遅延時間を用いた時間制御を加えることができる。その時間制御に用いる遅延時間はアレイ型超音波センサ4の各圧電振動素子ごとに可変することができる可変型遅延制御装置の構成を有する。
【0024】
その遅延制御装置7には、コンピュータで構成されている制御装置8が接続されている。その制御装置8は、遅延制御装置7や超音波送・受信機6を制御して、時間制御や送信信号の送信や受信信号の受信の各動作の制御や受信信号の解析や波形表示手段への画像表示のための処理を担う。その制御装置8には、アレイ型超音波センサ4の各圧電振動素子ごとに受信信号を遅延時間制御装置7による時間制御を加えない状態で取り込む回路が遅延時間制御装置7との間に設けられ、その時間制御を加えない状態の受信信号を各圧電振動素子ごとに受信時間や受信強度で解析して波形表示手段に表示する機能を有する。各圧電振動素子ごとに受信時間や受信強度で解析した結果は、例えば、図2,図3,図4のように、各圧電振動素子ごとの超音波の受信強度や到達時間のデータとして制御装置8の記憶装置に記憶及び波形表示手段9へ表示する機能を有する。さらには、制御装置8は、遅延制御装置7に制御装置8で演算して求めた遅延時間を各圧電振動素子ごとにセットしたり、解析した超音波の強度に基づいて超音波送・受信機6に送受信に使用する各圧電振動素子を選択してセットさせたりする機能を有する。その他に、従来通り、制御装置8は時間制御を加えた受信信号を加算合成したものを波形表示手段に表示する機能を有する。
【0025】
一方、超音波センサ3には、超音波センサ3に送信信号を送信したり超音波センサ3からの電気信号を受信信号として受信したりする超音波送・受信機11が接続され、その超音波送・受信機11にはその受信信号を解析して受信波形を表示する波形表示手段が備えられている。その超音波送・受信機11は制御装置8と接続されて、超音波送・受信機6,11で送受信が同期するように構成されている。
【0026】
ここでは、超音波センサ3は焦点型の超音波センサを用いる。その理由は、焦点径が小さくなり、また焦点を過ぎると超音波が広がるため、広い範囲でアレイ型超音波センサの遅延時間を設定できるためである。
【0027】
焦点型の超音波センサ3の設置においては、先ず、この超音波センサ3から超音波を送信する。次に超音波センサ3で受信した超音波に由来する受信信号を超音波送・受信機
11に接続された波形表示手段13を用いて波形表示、波形表示手段13に表示される反射波の時間及び強度を確認しながら、検査対象面2に超音波センサ3の焦点を合わせる。
【0028】
次に、この超音波センサ3から送信し、検査対象面2で焦点を結び、検査対象1を通過してきた超音波12をアレイ型超音波センサ4の各圧電振動素子で受信する。この際に、超音波センサ3から送信された超音波がアレイ型超音波センサ4の各圧電振動素子に到達するまでの時間は、検査対象1内部での超音波の伝播経路に対応して、超音波センサ3の真上の圧電振動素子が最も早く、外側の圧電振動素子ほど遅くなる。但し、ここでは検査対象1に音響的異方性はないものとして説明したが、音響的異方性がある場合には、超音波センサ3の真上の圧電振動素子が最も早く、外側の各圧電振動素子ほど遅くなるとは限らず、超音波伝達経路の音速に依存することになる。
【0029】
このようにして超音波センサ3からアレイ型超音波センサ4の各圧電振動素子に到達した超音波12は、各圧電振動素子で電気信号に変換されて受信信号となって超音波送・受信機6で受信され、各圧電振動素子ごとに超音波検査装置の制御装置8に時間波形あるいは超音波強度の時間変化が記録され、アレイ型超音波検査装置の波形表示手段9に表示される。このとき超音波検査装置の制御装置8は、超音波センサ3の超音波送・受信機11と同期信号10により、同期して動作して、検査対象面2に下方に設置した超音波センサ3から送信した超音波12により、検査対象面2に点音源を実際に生成し、この点音源を通過した超音波12の到達時間をアレイ型超音波センサ4の各圧電振動素子で受けた受信信号から計測する。
【0030】
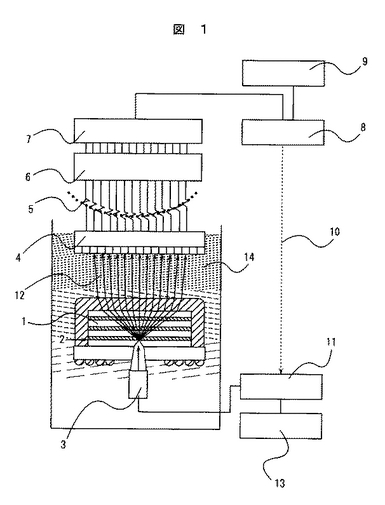
次にアレイ型超音波センサ4の各圧電振動素子の遅延時間の設定方法と、その焦点径の確認方法を説明する。アレイ型超音波センサが1次元リニアアレイセンサの場合、アレイ方向の法線方向は曲面構造となっており、この曲面が音響的レンズの役割を果たすようになっている場合がある。このような場合には、アレイ型超音波センサ4の任意の1素子で超音波を受信した際の超音波の強度を、アレイ型超音波センサ4と検査対象1との距離を変えて計測する。その結果が図2である。
【0031】
この図2は、アレイ方向の法線方向の曲面構造により、この曲面構造に由来する音響的焦点と超音波センサ3の焦点が一致した際に、受信した超音波の強度は最大となることを示している。そのため、アレイ型超音波センサ4の距離を強度が最大となる点に設定する。
【0032】
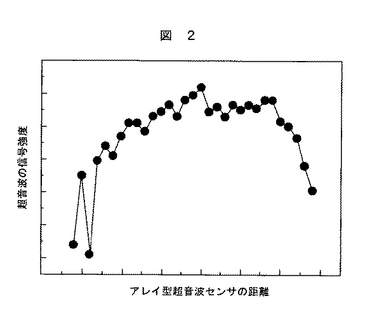
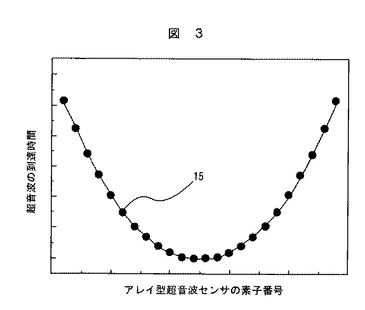
また、アレイ型超音波センサ4のアレイ法線方向が曲面でない場合は、曲面構造による超音波の集束効果がないため、下方からの超音波12をアレイ型超音波センサ4で受信可能なように、検査対象1との距離を設定する。このようにして設定した、アレイ型超音波センサ4の距離にて、超音波センサ3からの超音波の受信時間を計測すると、図3が得られる。図3は横軸にアレイ型超音波センサ4の各圧電振動素子の素子番号、縦軸に超音波の到達時間を示している。この超音波の到達時間15は、前記したように、検査対象1に音響的異方性がない場合、超音波センサ3の真上の圧電振動素子が最も超音波の到達時間が短く、外側に圧電振動素子が離れるほど到達時間が長くなる。
【0033】
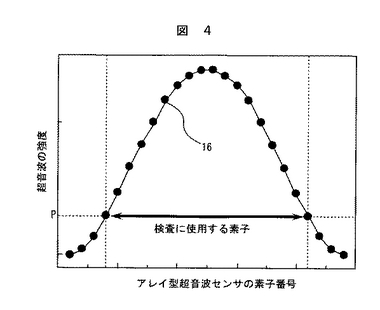
このため、ここで示した図3の場合は、アレイ型超音波センサの各圧電振動素子の素子番号の中央付近の真下に超音波センサ4が設置されていることになる。また、1回の検査に使用するアレイ型超音波センサの駆動対象として選択する各圧電振動素子の素子数は、装置の仕様に合わせて任意に選択しても良いし、図4に示すように超音波の受信強度16によって、水平な点線で表したしきい値を設け、その閾値を超えた強度を示した各圧電振動素子を選択して、これにより1回の検査で使用する素子数を決定しても良い。
【0034】
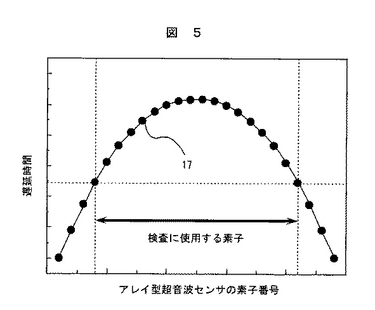
ここで、図3のアレイ型超音波センサ4で受信した、超音波12の到達時間15を時間軸(図4の縦軸)に対して逆に折り返すと、アレイ型超音波センサ4の遅延時間17となる図6が得られる。通常は、使用する各圧電振動素子の最端部の素子の遅延時間を0とする。遅延時間17を演算して求めることや、どの圧電振動素子を駆動対象として選択することや、遅延時間17を駆動対象の各振動素子ごとに時間制御として加えることを遅延制御装置7や超音波送・受信機6が行えるようにセットする指令を制御装置8が発令することによって実行可能となる。そのセットについては波形情報を波形表示手段9を目視して手動で遅延制御装置や超音波送受信機を操作して行っても良い。
【0035】
このようにして得られたアレイ型超音波センサ4の遅延時間17は、アレイ型超音波センサ4の各圧電振動素子の超音波送・受信の時間制御に用いる。リニアアレイ超音波センサの場合には、アレイ型超音波センサ4の遅延時間をアレイ方向に各圧電振動素子を電子的に順次切り替えることで電子的な走査を実施する。
【0036】
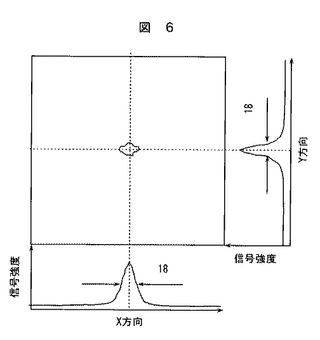
次に、このようにして得た遅延時間による超音波の焦点径の確認方法を説明する。超音波センサ3から送信した超音波12に対して、アレイ型超音波センサ4に遅延時間17をつけて波形を加算し、これをアレイ方向には電子的に走査し、アレイの法線方向にはアレイ型超音波センサあるいは検査対象1と超音波センサ3を機械的に走査することにより、検査対象面2の平面内での受信超音波の強度分布を得ると図6に示す超音波の強度分布図が得られる。これを用いて超音波センサ3の焦点径を計測する。
【0037】
但し、集束径を確認する場合には、超音波センサ3から送信される超音波12が検査対象面で焦点を結ぶような単焦点型の超音波センサである必要があり、その焦点径もアレイ型超音波センサ4が作る集束音場の焦点径よりも小さい必要がある。センサの焦点径については、あらかじめ超音波センサを選択する際に、下方に設置する超音波センサの焦点径が十分小さくなるように選択しておけば良い。通常、焦点径は超音波の強度の半値幅18で評価する。
【0038】
このように、アレイ型超音波センサの焦点径を確認してから、検査対象面2の検査を実施する。検査においては、アレイ型超音波センサ4のみを用いて、アレイ型超音波センサ4から検査対象1内に超音波を送信する。この場合には、遅延制御装置7でアレイ型超音波センサ4の各圧電振動素子に各圧電振動素子ごとに演算した遅延時間17の分だけ時間的にずらした送信信号を各圧電振動素子の駆動信号として超音波送・受信機6から各圧電振動素子に印加し、各圧電振動素子から超音波を送信し、検査対象1内から反射してきた超音波を各圧電振動素子が受けて各圧電振動素子が電気信号を受信信号として発する。その受信信号は超音波送・受信機6に送信されて、さらには遅延制御装置7で各圧電振動素子を遅延時間17の分だけ時間的にずらして受信信号を波形合成する。合成された受信信号は制御装置8に伝送されて解析され、波形表示手段9に受信波形が表示される。この動作を、アレイ方向については、電子的に各圧電振動素子をずらしていくことで走査し、アレイの法線方向についてはアレイ型超音波センサ4あるいは検査対象1を機械的に走査することにより、検査対象面2の検査を行う。
【0039】
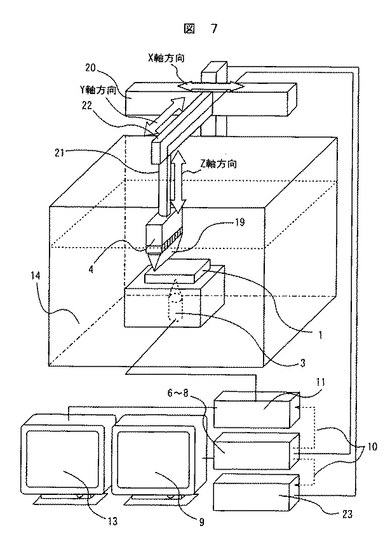
次に、具体的な検査実施状況を図7を用いて説明する。この図7には、アレイ型超音波センサ4と検査対象1との相対位置を移動して検査するための走査手段20〜22及び走査手段制御装置23を用いてアレイ型センサ4と検査対象1と相対的な位置を設定して、検査を実施する。
【0040】
ここでは走査手段20〜22として機械的走査手段が採用され、X軸方向に移動する走査手段20と、Z軸方向に移動する走査手段21、及びY軸方向に移動する走査手段22を備えている場合を示している。
【0041】
また、これらの走査手段20〜22は走査手段制御装置23により移動量と移動速度を制御し、アレイ型超音波検査装置の制御装置と同期信号10により同期して動作し、超音波の波形あるいは超音波の強度を映像化することにより、検査を実施する。検査結果は波形表示手段9に収録波形として表示するとともに、コンピュータからなるアレイ型超音波センサを用いた検査装置の制御装置8で画像化処理することで、検査結果を画像として表示する機能を有する。検査対象1の内部の検査対象面2にはく離やボイドなどのような欠陥がある場合には、欠陥からの反射波が受信され、これが検査対象面内に欠陥像として計測され、波形表示手段9にその欠陥像が表示される。
【0042】
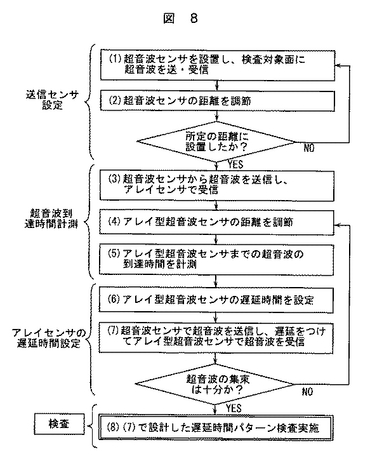
以上のように説明してきた、アレイ型超音波センサによる検査方法の手順を図8にまとめる。本発明によるアレイ型超音波センサによる検査方法には大きく分けて4つの部分からなる。まず第1に音源送信用の超音波センサを設置し、検査対象面と超音波センサの距離を所定の位置に設定する。
【0043】
次にアレイ型超音波センサにより、超音波センサから送信された超音波がアレイ型超音波センサまでの到達時間を計測する。このアレイ型超音波センサまでの超音波の到達時間より、アレイ型超音波センサの遅延時間を設定し、これを用いて超音波の焦点径を確認する。
【0044】
超音波の焦点径が十分な径であれば、設定した遅延時間を用いてアレイ型超音波センサで超音波を送・受信ながらアレイ方向については、電子的に圧電振動素子をずらしていくことで走査し、アレイの法線方向についてはアレイ型超音波センサ4あるいは検査対象1と超音波センサ3を走査手段で機械的に走査することにより検査を実施する。
【0045】
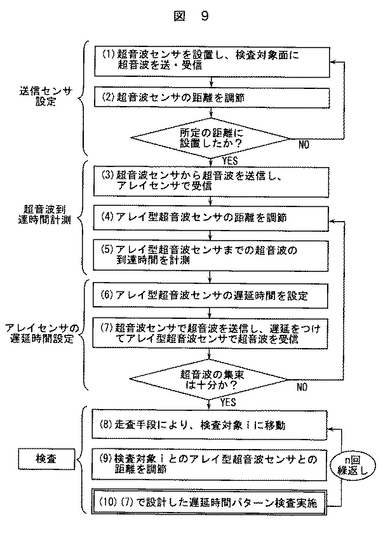
次に、ライン検査などにおいて、複数個の検査対象を一括して検査する必要がある場合の検査の手順を、図9を用いて説明する。ひとつあるいはそれ以上の検査対象を用いて、アレイ型超音波センサの遅延時間を設定すれば、得られた遅延時間を用いることで、同じ種類の複数個の検査対象を一括して検査することも可能である。
【0046】
その手順は、超音波の集束を確認した後、走査手段により次の検査対象iに移動し、検査対象iとアレイ型超音波センサとの距離が遅延時間を求めたときと同じくなるように設定する。ここでは、検査対象iの表面から反射してくる反射波の到達時間を基準として、遅延時間を求めたときと同じくなるように距離を調整すればよい。検査対象iとアレイ型超音波センサ4との距離を調節した後、あらかじめ設定しておいた遅延時間を用いて検査を実施する。この動作を検査対象の個数であるn回繰り返すことで、複数個の検査対象を一括して検査することが可能となる。
【0047】
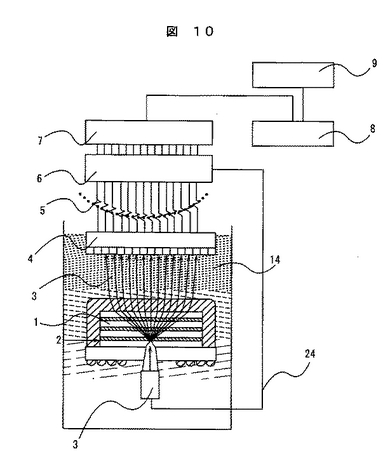
次に第2の実施の形態を、図10を用いて説明する。図10は、図1での説明に用いた、検査対象の下方に設置する超音波センサ3の超音波送・受信機11を省いた装置構成となっており、その代わりにアレイ型超音波センサ4の超音波送・受信機6の複数あるチャンネルのうちの1つのチャンネルをこの下方に設置する超音波センサ3の送・受信機として割り当てて用いる構成である。超音波送・受信機6の1つのチャンネルと超音波センサ3とは電気回線24で接続されている。
【0048】
このような構成の場合、超音波送・受信機6から電気回線24を通じて超音波センサ3に送信信号を駆動信号として伝送できるので、アレイ型超音波センサ4の超音波送・受信機6以外に超音波送・受信機を必要としない。そのため、装置の低コスト化が可能である。また、外部に余計な超音波送・受信機を設置する必要がないため、第1の実施例のように超音波送・受信機11と超音波検査装置の制御装置8同士の同期を取る必要がないため、簡易な構成となる。検査方法に関しては、第1の実施の形態で用いた図8で示した手順と同じであり、また、複数個の検査対象を一括して検査するときの検査の手順も図9で説明した場合と同様である。
【0049】
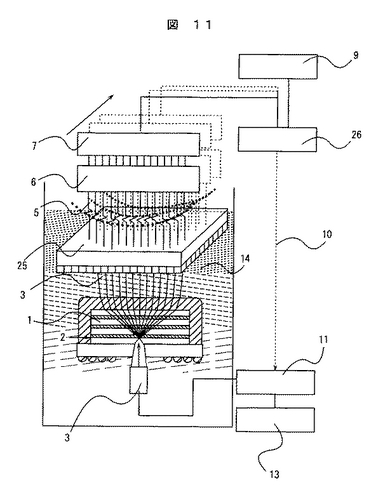
さらに図11を用いて第3の実施の形態を説明する。第3の実施の形態では、アレイ型超音波センサ4として、2次元配列の各圧電振動素子を用いることを特徴としている。2次元配列の各圧電振動素子を有する超音波センサとしては、2次元マトリクスアレイセンサやリングアレイセンサ,円周方向分割型リングアレイセンサなどがあるが、本発明では、これらのどれを用いても良い。
【0050】
ここでは、その代表例として、2次元マトリクスアレイセンサを用いた場合を説明する。第3の実施の形態は、第1の実施の形態と比較して、アレイ型超音波センサ4が2次元マトリクスアレイセンサ25に変わっている点が異なるので、この点について述べる。超音波センサ3から送信され、検査対象面で焦点を結び、検査対象1を通過してきた超音波12を2次元マトリクスアレイセンサ25で受信する。
【0051】
この際に、超音波センサ3から送信された超音波が、パルス波の場合、2次元マトリクスアレイセンサ25に到達するまでの時間は、検査対象1内部での超音波の伝播経路に対応して、超音波センサ3の真上が最も早く、外側ほど遅くなる。但し、ここでは検査対象1に音響的異方性はないものとする。
【0052】
このように2次元マトリクスアレイセンサ25に到達した超音波12は、超音波送・受信機6で受信され、2次元マトリクスアレイの超音波検査装置の制御装置26に、その時間波形あるいは超音波強度の時間変化が記録される。このとき超音波検査装置の制御装置8は、超音波送・受信機11と同期信号10により、同期して動作する。
【0053】
2次元マトリクスアレイ超音波検査装置の制御装置26に記録された超音波の時間波形より、2次元マトリクスアレイセンサ25の各圧電振動素子までの超音波の到達時間を求める。求めた超音波の到達時間は、2次元マトリクスアレイセンサ25の各圧電振動素子の値となるので、2次元の超音波到達時間分布となり、これを用いて第1の実施の形態と同様にして、各圧電振動素子の遅延時間を決定する。
【0054】
検査に使用する素子数の決定方法や、焦点径の確認方法については、第1の実施例と同じである。検査方法については、2次元マトリクスアレイセンサの素子領域の面積が検査対象面2と比較して大きい場合には、素子の電子的な走査により検査を実施する。
【0055】
また、2次元マトリクスアレイセンサの素子領域の面積が検査対象面2と比較して小さい場合には、素子の電子的な走査を実施するとともに検査対象面を充足していない部分については、アレイ型センサあるいは検査対象を機械的に走査して検査を実施する。検査の手順に関しては、第1の実施の形態で用いた図8で示した手順と同じであり、また、複数個の検査対象を一括して検査するときの検査の手順も図9で説明した場合と同様である。
【0056】
このように本発明の実施例によるアレイ型超音波センサを用いた超音波検査装置及び検査方法は、検査対象の材料音速や詳細な内部構造が解らない場合でも、アレイ型超音波センサの最適な遅延時間を設定し、また検査に使用するアレイ型超音波センサの素子数も選択して検査を実施することが可能である。また、検査対象内部での超音波の焦点径を確認もできるため、欠陥の検出限界もあらかじめ知ることができ、検査の信頼性も向上する。さらに、ライン検査での全数検査においても、任意の検査対象で遅延時間を設定することで、同種の他多数の検査対象を一括して検査可能であるので、検査時間の短縮が可能となる。
【産業上の利用可能性】
【0057】
本発明は、検査対象物を超音波を用いて非破壊的に検査する超音波検査装置に適用できる。
【図面の簡単な説明】
【0058】
【図1】本発明による超音波検査装置の全体系統構成を示す図である。
【図2】本発明の検査装置及び方法において、アレイ型超音波センサと検査対象の距離の設定方法を説明する図である。
【図3】本発明の超音波検査装置及び方法において、超音波センサから送信した超音波がアレイ型超音波センサまで到達するまでの時間を説明する図である。
【図4】本発明の超音波検査装置及び方法において、超音波センサから送信した超音波がアレイ型超音波センサまで到達した超音波の強度を説明する図である。
【図5】本発明の超音波検査装置及び方法において、超音波センサから発振した超音波がアレイ型超音波センサまで到達するまでの時間から得られたアレイ型超音波センサの各圧電振動素子の遅延時間を示す図である。
【図6】本発明の超音波検査装置及び方法において、設定した遅延時間で、超音波の焦点径の確認を示す図である。
【図7】本発明の超音波検査装置及び方法において、検査実施状況を示す図である。
【図8】アレイ型超音波センサの各圧電振動素子の遅延時間の設定方法及び検査の手順を示す図である。
【図9】本発明の超音波検査装置及び方法において、ライン検査などの多数の検査対象の検査における実施の手順を示す図である。
【図10】本発明の超音波検査装置及び方法における、第2の実施形態に係わる超音波検査装置の全体系統構成を示す図である。
【図11】本発明の超音波検査装置及び方法における、第3の実施形態に係わる超音波検査装置の全体系統構成を示す図である。
【符号の説明】
【0059】
1…検査対象、2…検査対象面、3…超音波センサ、4…アレイ型超音波センサ、5…超音波の受信信号、6…アレイ型超音波センサの超音波送・受信機、7…遅延時間制御装置、8…アレイ型超音波センサを用いた超音波検査装置の制御装置、9…アレイ型超音波検査装置の波形表示手段、10…同期信号、11…超音波送・受信機、12…超音波、
13…超音波センサの波形表示手段、14…水槽、15…超音波センサからアレイ型超音波センサまでの超音波の到達時間、16…超音波の受信強度、17…アレイ型超音波センサの遅延時間、18…超音波の強度の半値幅、19…アレイ型超音波センサから発振した超音波、20…走査手段(X軸)、21…走査手段(Y軸)、22…走査手段(Z軸)、23…走査手段制御装置、25…2次元マトリクスアレイセンサ、26…2次元マトリクスアレイ超音波検査装置の制御装置。
【技術分野】
【0001】
本発明は、アレイ型超音波センサを使用して検査対象の内部を非破壊的に検査する超音波検査装置とその超音波検査方法に係わる。
【背景技術】
【0002】
従来のアレイ型超音波センサを用いた超音波検査装置では、超音波を検査対象内部に集束して検査を実施するために、アレイ型超音波センサの各圧電振動素子に送信信号として電圧を印加する際のタイミングを時間的に制御している。この時間制御の際に、アレイ型超音波センサのある圧電振動素子に対する送信信号の印加タイミングから各圧電振動素子毎に送信信号の印加タイミングをずらす時間が遅延時間である。
【0003】
この遅延時間を各圧電振動素子毎に設定するために、従来は、超音波を集束させたい点からアレイ型超音波センサの各圧電振動素子までの幾何学的距離を求め、これを検査対象の材料に依存する超音波の音速で割り、超音波を集束させたい点からアレイ型超音波センサの各圧電振動素子までの超音波の到達時間を求める。
【0004】
1回の超音波検査で使用するアレイ型超音波センサの各圧電振動素子のうち、最も集束させたい点に遠い素子、つまり超音波の到達時間が最も大きい素子を基準として、超音波の到達時間を時間軸上で折り返して遅延時間とする。これにより、集束させたい点に超音波が到達する際に、使用する全ての圧電振動素子から送信された超音波が、同一時刻に検査対象内の集束点に到達して超音波の集束が得られる。
【0005】
検査対象の材質が一つで音響伝達媒質としては単一媒質と見なされる場合は、以上のように集束点とアレイ型超音波センサの各圧電振動素子との距離と検査対象の媒質の音速により、簡単に遅延時間を設定することができる。このように超音波の焦点位置に応じて各圧電振動素子ごとに遅延時間を変えて時間制御を送信信号に加味して送信タイミング、即ち印加タイミングを変化させる。
【0006】
その各圧電振動素子毎に設定される遅延時間を変えれば、超音波の焦点位置も変わる。その焦点位置を変える為に、各圧電振動素子への送信信号に加味する時間制御のための遅延時間を制御回路によって可変とする可変遅延回路を備える超音波検査装置が公知である(例えば、特許文献1参照)。
【0007】
又、検査対象内に超音波を集束させる手段としては、アレイ型超音波センサに限らなければ、圧電振動素子から発せられた超音波を音響レンズで屈折させて焦点に集束させる技術が公知である(例えば、特許文献2参照)。
【0008】
さらに、圧電振動素子と検査対象との間の超音波路程中に置いた音響レンズの位置を圧電振動素子と検査対象との間で変化させることで同一の音響レンズで超音波の検査対象内の焦点位置を変化させることができることも公知である(例えば、特許文献3参照)。
【0009】
一方、検査対象が複数の材質により構成される場合には、式1で示されるスネルの法則で、各媒質での屈折角度を求め、超音波の幾何学的な伝播経路を計算することができる。
【0010】
【数1】
【0011】
ここで、θは超音波の入射角度及び屈折角度、vは超音波の音速、θやvの右下に添えた1,2は媒質番号である。
【0012】
【特許文献1】特開2003−130859号公報
【特許文献2】特開平11−211701号公報
【特許文献3】特開平10−82769号公報
【発明の開示】
【発明が解決しようとする課題】
【0013】
しかしながら、スネルの法則で超音波の屈折角度を求め、さらに求めた屈折角度と媒質の厚さから、超音波の幾何学的な伝播経路を求めるためには、検査対象を構成する各材料(各媒質)での超音波の音速と、検査対象の内部構造の寸法が必須である。
【0014】
そのため、新たな検査対象の検査を行うためには、検査対象を構成する全ての材料の音速をそれぞれ調査、あるいは計測し、検査対象の内部構造を調査するためにその断面を切出すなどする必要があった。さらに、特に検査対象の構成材料が薄いものからなる場合、音速を調査するために目的の材料を切出すことも難しく、また、薄いため超音波の音速を評価することも難しかった。これらの要因が、超音波検査における超音波の集束精度低下の原因となっていた。
【0015】
特に、検査対象が半導体であって、その半導体内部のはく離やボイドの検査においては、半導体の裏面側にはハンダボールが配列されており、これが超音波を反射・屈折するため、ハンダボールがない部分は半導体内部での同一平面内の検査が可能であるが、ハンダボール直下の部分については検査できない。そのため、半導体の表面側から入射した超音波により、検査を実施する。しかしながら、半導体の分野はその技術の進歩が著しく、新しい材料の適用がされるたびに、構成材料の全ての音速をそれぞれ調査、あるいは計測し、検査対象の内部構造を調査するためにその断面を切出すなどする必要があった。
【0016】
そのため本発明は、アレイ型超音波センサを用いた超音波検査装置において、検査対象の構成材料の音速や詳細な構造が不明確な場合でも、超音波の集束精度低下を抑制して超音波検査実施可能な超音波検査装置及び検査方法を提供することにある。
【課題を解決するための手段】
【0017】
本発明による超音波検査方法は、アレイ型超音波センサと他の超音波センサとを検査対象を挟んで設置し、前記他の超音波センサから前記検査対象内で集束するように送信した超音波を前記アレイ型超音波センサで受信し、前記他の超音波センサから前記検査対象を通して前記アレイ型超音波センサの各圧電振動素子までの前記超音波の到達時間を計測し、前記到達時間に基づいて超音波送・受信信号の制御に用いる遅延時間を求め、前記遅延時間に基づいて、前記各圧電振動素子へ印加する送信信号の送信タイミングと、前記の各圧電振動素子から出力された受信信号の受信タイミングを制御して前記アレイ型超音波センサから前記検査対象に超音波を送受信して検査対象内での超音波の集束精度低下を抑制しながら検査対象の内部を超音波を用いて非破壊検査することができるようにした。
【0018】
本発明による超音波検査装置は、アレイ型超音波センサと、前記アレイ型超音波センサの各圧電振動素子との間で送信信号と受信信号とを送受する超音波送・受信機と、前記送信信号と受信信号に前記各圧電振動素子ごとに遅延時間を可変して時間制御を加える遅延制御装置と、前記超音波送・受信機と遅延制御装置とを制御する制御装置と、前記受信信号に基づいて得られた情報を表示する表示手段と、を備えた超音波検査装置において、前記アレイ型超音波センサの検査対象を挟んだ反対側の位置に配置された超音波集束型の他の超音波センサと、前記他の超音波センサとの間で送信信号と受信信号とを送受する他の超音波送・受信機と、前記他の超音波センサからの受信信号に基づいて得られた情報を表示する表示手段とを備えることを特徴としている。
【発明の効果】
【0019】
本発明のアレイ型超音波センサを用いた超音波検査装置及び検査方法は、検査対象の材料音速や詳細な内部構造が解らない場合でも、アレイ型超音波センサの最適な遅延時間を設定して検査を実施することが可能である。
【発明を実施するための最良の形態】
【0020】
以下、本発明の各実施例を各図に基づいて説明する。図1は本発明の第1の実施の形態を示す図である。まず、図1を用いて遅延時間の設定方法について説明する。検査対象1の内部は多層構造の複雑な構造になっており、数種類の構成材料が上下多層に構成されている。
【0021】
超音波センサ3,アレイ型超音波センサ4及び検査対象1は超音波伝達媒質中(水などを用いる)にある。その超音波伝達媒質は水槽14に貯留されている。この超音波伝達媒質中の検査対象を下方側から超音波センサ3、上方側からアレイ型超音波センサ4で挟む配置で超音波センサ3とアレイ型超音波センサ4とが配置されている。その超音波センサ3としては、超音波を音響的焦点に集束させる機能を有する焦点型(超音波集束型とも言う。)の超音波センサを用いる。
【0022】
アレイ型超音波センサ4は、複数の圧電振動素子を同じ方向(アレイ方向)に並べた構成の素子配列を有するものである。その複数の圧電振動素子の一つ一つに超音波送・受信機6からの送受信線が接続されている。そのため、超音波送・受信機6から複数の圧電振動素子が個別の送信信号を受けて振動し、或いは超音波を受けて振動して電気信号を発して超音波送・受信機6へ個別に受信信号を送れる構成を採用している。
【0023】
その超音波送・受信機6には、遅延制御装置7が接続され、アレイ型超音波センサ4の各圧電振動素子への送信信号やアレイ型超音波センサ4の各圧電振動素子からの受信信号に遅延制御装置7が遅延時間を用いた時間制御を加えることができる。その時間制御に用いる遅延時間はアレイ型超音波センサ4の各圧電振動素子ごとに可変することができる可変型遅延制御装置の構成を有する。
【0024】
その遅延制御装置7には、コンピュータで構成されている制御装置8が接続されている。その制御装置8は、遅延制御装置7や超音波送・受信機6を制御して、時間制御や送信信号の送信や受信信号の受信の各動作の制御や受信信号の解析や波形表示手段への画像表示のための処理を担う。その制御装置8には、アレイ型超音波センサ4の各圧電振動素子ごとに受信信号を遅延時間制御装置7による時間制御を加えない状態で取り込む回路が遅延時間制御装置7との間に設けられ、その時間制御を加えない状態の受信信号を各圧電振動素子ごとに受信時間や受信強度で解析して波形表示手段に表示する機能を有する。各圧電振動素子ごとに受信時間や受信強度で解析した結果は、例えば、図2,図3,図4のように、各圧電振動素子ごとの超音波の受信強度や到達時間のデータとして制御装置8の記憶装置に記憶及び波形表示手段9へ表示する機能を有する。さらには、制御装置8は、遅延制御装置7に制御装置8で演算して求めた遅延時間を各圧電振動素子ごとにセットしたり、解析した超音波の強度に基づいて超音波送・受信機6に送受信に使用する各圧電振動素子を選択してセットさせたりする機能を有する。その他に、従来通り、制御装置8は時間制御を加えた受信信号を加算合成したものを波形表示手段に表示する機能を有する。
【0025】
一方、超音波センサ3には、超音波センサ3に送信信号を送信したり超音波センサ3からの電気信号を受信信号として受信したりする超音波送・受信機11が接続され、その超音波送・受信機11にはその受信信号を解析して受信波形を表示する波形表示手段が備えられている。その超音波送・受信機11は制御装置8と接続されて、超音波送・受信機6,11で送受信が同期するように構成されている。
【0026】
ここでは、超音波センサ3は焦点型の超音波センサを用いる。その理由は、焦点径が小さくなり、また焦点を過ぎると超音波が広がるため、広い範囲でアレイ型超音波センサの遅延時間を設定できるためである。
【0027】
焦点型の超音波センサ3の設置においては、先ず、この超音波センサ3から超音波を送信する。次に超音波センサ3で受信した超音波に由来する受信信号を超音波送・受信機
11に接続された波形表示手段13を用いて波形表示、波形表示手段13に表示される反射波の時間及び強度を確認しながら、検査対象面2に超音波センサ3の焦点を合わせる。
【0028】
次に、この超音波センサ3から送信し、検査対象面2で焦点を結び、検査対象1を通過してきた超音波12をアレイ型超音波センサ4の各圧電振動素子で受信する。この際に、超音波センサ3から送信された超音波がアレイ型超音波センサ4の各圧電振動素子に到達するまでの時間は、検査対象1内部での超音波の伝播経路に対応して、超音波センサ3の真上の圧電振動素子が最も早く、外側の圧電振動素子ほど遅くなる。但し、ここでは検査対象1に音響的異方性はないものとして説明したが、音響的異方性がある場合には、超音波センサ3の真上の圧電振動素子が最も早く、外側の各圧電振動素子ほど遅くなるとは限らず、超音波伝達経路の音速に依存することになる。
【0029】
このようにして超音波センサ3からアレイ型超音波センサ4の各圧電振動素子に到達した超音波12は、各圧電振動素子で電気信号に変換されて受信信号となって超音波送・受信機6で受信され、各圧電振動素子ごとに超音波検査装置の制御装置8に時間波形あるいは超音波強度の時間変化が記録され、アレイ型超音波検査装置の波形表示手段9に表示される。このとき超音波検査装置の制御装置8は、超音波センサ3の超音波送・受信機11と同期信号10により、同期して動作して、検査対象面2に下方に設置した超音波センサ3から送信した超音波12により、検査対象面2に点音源を実際に生成し、この点音源を通過した超音波12の到達時間をアレイ型超音波センサ4の各圧電振動素子で受けた受信信号から計測する。
【0030】
次にアレイ型超音波センサ4の各圧電振動素子の遅延時間の設定方法と、その焦点径の確認方法を説明する。アレイ型超音波センサが1次元リニアアレイセンサの場合、アレイ方向の法線方向は曲面構造となっており、この曲面が音響的レンズの役割を果たすようになっている場合がある。このような場合には、アレイ型超音波センサ4の任意の1素子で超音波を受信した際の超音波の強度を、アレイ型超音波センサ4と検査対象1との距離を変えて計測する。その結果が図2である。
【0031】
この図2は、アレイ方向の法線方向の曲面構造により、この曲面構造に由来する音響的焦点と超音波センサ3の焦点が一致した際に、受信した超音波の強度は最大となることを示している。そのため、アレイ型超音波センサ4の距離を強度が最大となる点に設定する。
【0032】
また、アレイ型超音波センサ4のアレイ法線方向が曲面でない場合は、曲面構造による超音波の集束効果がないため、下方からの超音波12をアレイ型超音波センサ4で受信可能なように、検査対象1との距離を設定する。このようにして設定した、アレイ型超音波センサ4の距離にて、超音波センサ3からの超音波の受信時間を計測すると、図3が得られる。図3は横軸にアレイ型超音波センサ4の各圧電振動素子の素子番号、縦軸に超音波の到達時間を示している。この超音波の到達時間15は、前記したように、検査対象1に音響的異方性がない場合、超音波センサ3の真上の圧電振動素子が最も超音波の到達時間が短く、外側に圧電振動素子が離れるほど到達時間が長くなる。
【0033】
このため、ここで示した図3の場合は、アレイ型超音波センサの各圧電振動素子の素子番号の中央付近の真下に超音波センサ4が設置されていることになる。また、1回の検査に使用するアレイ型超音波センサの駆動対象として選択する各圧電振動素子の素子数は、装置の仕様に合わせて任意に選択しても良いし、図4に示すように超音波の受信強度16によって、水平な点線で表したしきい値を設け、その閾値を超えた強度を示した各圧電振動素子を選択して、これにより1回の検査で使用する素子数を決定しても良い。
【0034】
ここで、図3のアレイ型超音波センサ4で受信した、超音波12の到達時間15を時間軸(図4の縦軸)に対して逆に折り返すと、アレイ型超音波センサ4の遅延時間17となる図6が得られる。通常は、使用する各圧電振動素子の最端部の素子の遅延時間を0とする。遅延時間17を演算して求めることや、どの圧電振動素子を駆動対象として選択することや、遅延時間17を駆動対象の各振動素子ごとに時間制御として加えることを遅延制御装置7や超音波送・受信機6が行えるようにセットする指令を制御装置8が発令することによって実行可能となる。そのセットについては波形情報を波形表示手段9を目視して手動で遅延制御装置や超音波送受信機を操作して行っても良い。
【0035】
このようにして得られたアレイ型超音波センサ4の遅延時間17は、アレイ型超音波センサ4の各圧電振動素子の超音波送・受信の時間制御に用いる。リニアアレイ超音波センサの場合には、アレイ型超音波センサ4の遅延時間をアレイ方向に各圧電振動素子を電子的に順次切り替えることで電子的な走査を実施する。
【0036】
次に、このようにして得た遅延時間による超音波の焦点径の確認方法を説明する。超音波センサ3から送信した超音波12に対して、アレイ型超音波センサ4に遅延時間17をつけて波形を加算し、これをアレイ方向には電子的に走査し、アレイの法線方向にはアレイ型超音波センサあるいは検査対象1と超音波センサ3を機械的に走査することにより、検査対象面2の平面内での受信超音波の強度分布を得ると図6に示す超音波の強度分布図が得られる。これを用いて超音波センサ3の焦点径を計測する。
【0037】
但し、集束径を確認する場合には、超音波センサ3から送信される超音波12が検査対象面で焦点を結ぶような単焦点型の超音波センサである必要があり、その焦点径もアレイ型超音波センサ4が作る集束音場の焦点径よりも小さい必要がある。センサの焦点径については、あらかじめ超音波センサを選択する際に、下方に設置する超音波センサの焦点径が十分小さくなるように選択しておけば良い。通常、焦点径は超音波の強度の半値幅18で評価する。
【0038】
このように、アレイ型超音波センサの焦点径を確認してから、検査対象面2の検査を実施する。検査においては、アレイ型超音波センサ4のみを用いて、アレイ型超音波センサ4から検査対象1内に超音波を送信する。この場合には、遅延制御装置7でアレイ型超音波センサ4の各圧電振動素子に各圧電振動素子ごとに演算した遅延時間17の分だけ時間的にずらした送信信号を各圧電振動素子の駆動信号として超音波送・受信機6から各圧電振動素子に印加し、各圧電振動素子から超音波を送信し、検査対象1内から反射してきた超音波を各圧電振動素子が受けて各圧電振動素子が電気信号を受信信号として発する。その受信信号は超音波送・受信機6に送信されて、さらには遅延制御装置7で各圧電振動素子を遅延時間17の分だけ時間的にずらして受信信号を波形合成する。合成された受信信号は制御装置8に伝送されて解析され、波形表示手段9に受信波形が表示される。この動作を、アレイ方向については、電子的に各圧電振動素子をずらしていくことで走査し、アレイの法線方向についてはアレイ型超音波センサ4あるいは検査対象1を機械的に走査することにより、検査対象面2の検査を行う。
【0039】
次に、具体的な検査実施状況を図7を用いて説明する。この図7には、アレイ型超音波センサ4と検査対象1との相対位置を移動して検査するための走査手段20〜22及び走査手段制御装置23を用いてアレイ型センサ4と検査対象1と相対的な位置を設定して、検査を実施する。
【0040】
ここでは走査手段20〜22として機械的走査手段が採用され、X軸方向に移動する走査手段20と、Z軸方向に移動する走査手段21、及びY軸方向に移動する走査手段22を備えている場合を示している。
【0041】
また、これらの走査手段20〜22は走査手段制御装置23により移動量と移動速度を制御し、アレイ型超音波検査装置の制御装置と同期信号10により同期して動作し、超音波の波形あるいは超音波の強度を映像化することにより、検査を実施する。検査結果は波形表示手段9に収録波形として表示するとともに、コンピュータからなるアレイ型超音波センサを用いた検査装置の制御装置8で画像化処理することで、検査結果を画像として表示する機能を有する。検査対象1の内部の検査対象面2にはく離やボイドなどのような欠陥がある場合には、欠陥からの反射波が受信され、これが検査対象面内に欠陥像として計測され、波形表示手段9にその欠陥像が表示される。
【0042】
以上のように説明してきた、アレイ型超音波センサによる検査方法の手順を図8にまとめる。本発明によるアレイ型超音波センサによる検査方法には大きく分けて4つの部分からなる。まず第1に音源送信用の超音波センサを設置し、検査対象面と超音波センサの距離を所定の位置に設定する。
【0043】
次にアレイ型超音波センサにより、超音波センサから送信された超音波がアレイ型超音波センサまでの到達時間を計測する。このアレイ型超音波センサまでの超音波の到達時間より、アレイ型超音波センサの遅延時間を設定し、これを用いて超音波の焦点径を確認する。
【0044】
超音波の焦点径が十分な径であれば、設定した遅延時間を用いてアレイ型超音波センサで超音波を送・受信ながらアレイ方向については、電子的に圧電振動素子をずらしていくことで走査し、アレイの法線方向についてはアレイ型超音波センサ4あるいは検査対象1と超音波センサ3を走査手段で機械的に走査することにより検査を実施する。
【0045】
次に、ライン検査などにおいて、複数個の検査対象を一括して検査する必要がある場合の検査の手順を、図9を用いて説明する。ひとつあるいはそれ以上の検査対象を用いて、アレイ型超音波センサの遅延時間を設定すれば、得られた遅延時間を用いることで、同じ種類の複数個の検査対象を一括して検査することも可能である。
【0046】
その手順は、超音波の集束を確認した後、走査手段により次の検査対象iに移動し、検査対象iとアレイ型超音波センサとの距離が遅延時間を求めたときと同じくなるように設定する。ここでは、検査対象iの表面から反射してくる反射波の到達時間を基準として、遅延時間を求めたときと同じくなるように距離を調整すればよい。検査対象iとアレイ型超音波センサ4との距離を調節した後、あらかじめ設定しておいた遅延時間を用いて検査を実施する。この動作を検査対象の個数であるn回繰り返すことで、複数個の検査対象を一括して検査することが可能となる。
【0047】
次に第2の実施の形態を、図10を用いて説明する。図10は、図1での説明に用いた、検査対象の下方に設置する超音波センサ3の超音波送・受信機11を省いた装置構成となっており、その代わりにアレイ型超音波センサ4の超音波送・受信機6の複数あるチャンネルのうちの1つのチャンネルをこの下方に設置する超音波センサ3の送・受信機として割り当てて用いる構成である。超音波送・受信機6の1つのチャンネルと超音波センサ3とは電気回線24で接続されている。
【0048】
このような構成の場合、超音波送・受信機6から電気回線24を通じて超音波センサ3に送信信号を駆動信号として伝送できるので、アレイ型超音波センサ4の超音波送・受信機6以外に超音波送・受信機を必要としない。そのため、装置の低コスト化が可能である。また、外部に余計な超音波送・受信機を設置する必要がないため、第1の実施例のように超音波送・受信機11と超音波検査装置の制御装置8同士の同期を取る必要がないため、簡易な構成となる。検査方法に関しては、第1の実施の形態で用いた図8で示した手順と同じであり、また、複数個の検査対象を一括して検査するときの検査の手順も図9で説明した場合と同様である。
【0049】
さらに図11を用いて第3の実施の形態を説明する。第3の実施の形態では、アレイ型超音波センサ4として、2次元配列の各圧電振動素子を用いることを特徴としている。2次元配列の各圧電振動素子を有する超音波センサとしては、2次元マトリクスアレイセンサやリングアレイセンサ,円周方向分割型リングアレイセンサなどがあるが、本発明では、これらのどれを用いても良い。
【0050】
ここでは、その代表例として、2次元マトリクスアレイセンサを用いた場合を説明する。第3の実施の形態は、第1の実施の形態と比較して、アレイ型超音波センサ4が2次元マトリクスアレイセンサ25に変わっている点が異なるので、この点について述べる。超音波センサ3から送信され、検査対象面で焦点を結び、検査対象1を通過してきた超音波12を2次元マトリクスアレイセンサ25で受信する。
【0051】
この際に、超音波センサ3から送信された超音波が、パルス波の場合、2次元マトリクスアレイセンサ25に到達するまでの時間は、検査対象1内部での超音波の伝播経路に対応して、超音波センサ3の真上が最も早く、外側ほど遅くなる。但し、ここでは検査対象1に音響的異方性はないものとする。
【0052】
このように2次元マトリクスアレイセンサ25に到達した超音波12は、超音波送・受信機6で受信され、2次元マトリクスアレイの超音波検査装置の制御装置26に、その時間波形あるいは超音波強度の時間変化が記録される。このとき超音波検査装置の制御装置8は、超音波送・受信機11と同期信号10により、同期して動作する。
【0053】
2次元マトリクスアレイ超音波検査装置の制御装置26に記録された超音波の時間波形より、2次元マトリクスアレイセンサ25の各圧電振動素子までの超音波の到達時間を求める。求めた超音波の到達時間は、2次元マトリクスアレイセンサ25の各圧電振動素子の値となるので、2次元の超音波到達時間分布となり、これを用いて第1の実施の形態と同様にして、各圧電振動素子の遅延時間を決定する。
【0054】
検査に使用する素子数の決定方法や、焦点径の確認方法については、第1の実施例と同じである。検査方法については、2次元マトリクスアレイセンサの素子領域の面積が検査対象面2と比較して大きい場合には、素子の電子的な走査により検査を実施する。
【0055】
また、2次元マトリクスアレイセンサの素子領域の面積が検査対象面2と比較して小さい場合には、素子の電子的な走査を実施するとともに検査対象面を充足していない部分については、アレイ型センサあるいは検査対象を機械的に走査して検査を実施する。検査の手順に関しては、第1の実施の形態で用いた図8で示した手順と同じであり、また、複数個の検査対象を一括して検査するときの検査の手順も図9で説明した場合と同様である。
【0056】
このように本発明の実施例によるアレイ型超音波センサを用いた超音波検査装置及び検査方法は、検査対象の材料音速や詳細な内部構造が解らない場合でも、アレイ型超音波センサの最適な遅延時間を設定し、また検査に使用するアレイ型超音波センサの素子数も選択して検査を実施することが可能である。また、検査対象内部での超音波の焦点径を確認もできるため、欠陥の検出限界もあらかじめ知ることができ、検査の信頼性も向上する。さらに、ライン検査での全数検査においても、任意の検査対象で遅延時間を設定することで、同種の他多数の検査対象を一括して検査可能であるので、検査時間の短縮が可能となる。
【産業上の利用可能性】
【0057】
本発明は、検査対象物を超音波を用いて非破壊的に検査する超音波検査装置に適用できる。
【図面の簡単な説明】
【0058】
【図1】本発明による超音波検査装置の全体系統構成を示す図である。
【図2】本発明の検査装置及び方法において、アレイ型超音波センサと検査対象の距離の設定方法を説明する図である。
【図3】本発明の超音波検査装置及び方法において、超音波センサから送信した超音波がアレイ型超音波センサまで到達するまでの時間を説明する図である。
【図4】本発明の超音波検査装置及び方法において、超音波センサから送信した超音波がアレイ型超音波センサまで到達した超音波の強度を説明する図である。
【図5】本発明の超音波検査装置及び方法において、超音波センサから発振した超音波がアレイ型超音波センサまで到達するまでの時間から得られたアレイ型超音波センサの各圧電振動素子の遅延時間を示す図である。
【図6】本発明の超音波検査装置及び方法において、設定した遅延時間で、超音波の焦点径の確認を示す図である。
【図7】本発明の超音波検査装置及び方法において、検査実施状況を示す図である。
【図8】アレイ型超音波センサの各圧電振動素子の遅延時間の設定方法及び検査の手順を示す図である。
【図9】本発明の超音波検査装置及び方法において、ライン検査などの多数の検査対象の検査における実施の手順を示す図である。
【図10】本発明の超音波検査装置及び方法における、第2の実施形態に係わる超音波検査装置の全体系統構成を示す図である。
【図11】本発明の超音波検査装置及び方法における、第3の実施形態に係わる超音波検査装置の全体系統構成を示す図である。
【符号の説明】
【0059】
1…検査対象、2…検査対象面、3…超音波センサ、4…アレイ型超音波センサ、5…超音波の受信信号、6…アレイ型超音波センサの超音波送・受信機、7…遅延時間制御装置、8…アレイ型超音波センサを用いた超音波検査装置の制御装置、9…アレイ型超音波検査装置の波形表示手段、10…同期信号、11…超音波送・受信機、12…超音波、
13…超音波センサの波形表示手段、14…水槽、15…超音波センサからアレイ型超音波センサまでの超音波の到達時間、16…超音波の受信強度、17…アレイ型超音波センサの遅延時間、18…超音波の強度の半値幅、19…アレイ型超音波センサから発振した超音波、20…走査手段(X軸)、21…走査手段(Y軸)、22…走査手段(Z軸)、23…走査手段制御装置、25…2次元マトリクスアレイセンサ、26…2次元マトリクスアレイ超音波検査装置の制御装置。
【特許請求の範囲】
【請求項1】
アレイ型超音波センサと他の超音波センサとを検査対象を挟んで設置し、前記他の超音波センサから前記検査対象に送信した超音波を前記アレイ型超音波センサで受信し、前記他の超音波センサから前記検査対象を通して前記アレイ型超音波センサの各圧電振動素子までの前記超音波の到達時間を計測し、前記到達時間に基づいて超音波送・受信信号の制御に用いる遅延時間を求め、前記遅延時間に基づいて、前記各圧電振動素子へ印加する送信信号の送信タイミングと、前記の各圧電振動素子から出力された受信信号の受信タイミングを制御して前記アレイ型超音波センサから前記検査対象に超音波を送受信する超音波検査方法。
【請求項2】
請求項1において、前記他の超音波センサから前記検査対象を通して前記アレイ型超音波センサの各圧電振動素子まで到達した前記超音波の受信強度に基づいて、前記アレイ型超音波センサで前記検査対象を検査する際に使用する前記圧電振動素子を選択する超音波検査方法。
【請求項3】
請求項1又は請求項2において、前記検査対象と同一種類の他の検査対象を検査する際に、前記遅延時間を前記各圧電振動素子へ印加する送信信号の送信タイミングと、前記の各圧電振動素子から出力された受信信号の受信タイミングとの制御に用いて、前記他の検査対象を検査する超音波検査方法。
【請求項4】
アレイ型超音波センサと、
前記アレイ型超音波センサの各圧電振動素子との間で送信信号と受信信号とを送受する超音波送・受信機と、
前記送信信号と受信信号に前記各圧電振動素子ごとに遅延時間を可変して時間制御を加える遅延制御装置と、
前記超音波送・受信機と遅延制御装置とを制御する制御装置と、
前記受信信号に基づいて得られた情報を表示する表示手段と、
を備えた超音波検査装置において、
前記アレイ型超音波センサの検査対象を挟んだ反対側の位置に配置された超音波集束型の他の超音波センサと、
前記他の超音波センサとの間で送信信号と受信信号とを送受する他の超音波送・受信機と、
前記他の超音波センサからの受信信号に基づいて得られた情報を表示する表示手段と、
を備えることを特徴とする超音波検査装置。
【請求項5】
請求項4において、
前記各圧電振動素子からの前記受信信号に基づいて前記各圧電振動素子ごとに前記他の超音波センサから前記各圧電振動素子への超音波の到達時間を計測する手段を備えていることを特徴とする超音波検査装置。
【請求項6】
請求項5において、前記到達時間から前記各圧電振動素子へ送信する送信信号に加える時間制御のための遅延時間を演算する手段を備えていることを特徴とする超音波検査装置。
【請求項7】
請求項4から請求項6までのいずれか一項において、前記超音波送・受信機の受信と前記他の超音波送・受信機の送信とを同期してあることを特徴とする超音波検査装置。
【請求項8】
請求項4から請求項7までのいずれか一項において、前記超音波送・受信機の送受信のチャンネルの一部を前記他の超音波センサに割り当てて前記超音波送・受信機を前記他の超音波センサの超音波送・受信機に兼用してあることを特徴とする超音波検査装置。
【請求項9】
請求項4から請求項8までのいずれか一項において、前記アレイ型超音波センサと前記検査対象との位置関係を相対的に変位させる走査手段を備えていることを特徴とする超音波検査装置。
【請求項1】
アレイ型超音波センサと他の超音波センサとを検査対象を挟んで設置し、前記他の超音波センサから前記検査対象に送信した超音波を前記アレイ型超音波センサで受信し、前記他の超音波センサから前記検査対象を通して前記アレイ型超音波センサの各圧電振動素子までの前記超音波の到達時間を計測し、前記到達時間に基づいて超音波送・受信信号の制御に用いる遅延時間を求め、前記遅延時間に基づいて、前記各圧電振動素子へ印加する送信信号の送信タイミングと、前記の各圧電振動素子から出力された受信信号の受信タイミングを制御して前記アレイ型超音波センサから前記検査対象に超音波を送受信する超音波検査方法。
【請求項2】
請求項1において、前記他の超音波センサから前記検査対象を通して前記アレイ型超音波センサの各圧電振動素子まで到達した前記超音波の受信強度に基づいて、前記アレイ型超音波センサで前記検査対象を検査する際に使用する前記圧電振動素子を選択する超音波検査方法。
【請求項3】
請求項1又は請求項2において、前記検査対象と同一種類の他の検査対象を検査する際に、前記遅延時間を前記各圧電振動素子へ印加する送信信号の送信タイミングと、前記の各圧電振動素子から出力された受信信号の受信タイミングとの制御に用いて、前記他の検査対象を検査する超音波検査方法。
【請求項4】
アレイ型超音波センサと、
前記アレイ型超音波センサの各圧電振動素子との間で送信信号と受信信号とを送受する超音波送・受信機と、
前記送信信号と受信信号に前記各圧電振動素子ごとに遅延時間を可変して時間制御を加える遅延制御装置と、
前記超音波送・受信機と遅延制御装置とを制御する制御装置と、
前記受信信号に基づいて得られた情報を表示する表示手段と、
を備えた超音波検査装置において、
前記アレイ型超音波センサの検査対象を挟んだ反対側の位置に配置された超音波集束型の他の超音波センサと、
前記他の超音波センサとの間で送信信号と受信信号とを送受する他の超音波送・受信機と、
前記他の超音波センサからの受信信号に基づいて得られた情報を表示する表示手段と、
を備えることを特徴とする超音波検査装置。
【請求項5】
請求項4において、
前記各圧電振動素子からの前記受信信号に基づいて前記各圧電振動素子ごとに前記他の超音波センサから前記各圧電振動素子への超音波の到達時間を計測する手段を備えていることを特徴とする超音波検査装置。
【請求項6】
請求項5において、前記到達時間から前記各圧電振動素子へ送信する送信信号に加える時間制御のための遅延時間を演算する手段を備えていることを特徴とする超音波検査装置。
【請求項7】
請求項4から請求項6までのいずれか一項において、前記超音波送・受信機の受信と前記他の超音波送・受信機の送信とを同期してあることを特徴とする超音波検査装置。
【請求項8】
請求項4から請求項7までのいずれか一項において、前記超音波送・受信機の送受信のチャンネルの一部を前記他の超音波センサに割り当てて前記超音波送・受信機を前記他の超音波センサの超音波送・受信機に兼用してあることを特徴とする超音波検査装置。
【請求項9】
請求項4から請求項8までのいずれか一項において、前記アレイ型超音波センサと前記検査対象との位置関係を相対的に変位させる走査手段を備えていることを特徴とする超音波検査装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−292697(P2006−292697A)
【公開日】平成18年10月26日(2006.10.26)
【国際特許分類】
【出願番号】特願2005−117670(P2005−117670)
【出願日】平成17年4月15日(2005.4.15)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
【公開日】平成18年10月26日(2006.10.26)
【国際特許分類】
【出願日】平成17年4月15日(2005.4.15)
【出願人】(390023928)日立エンジニアリング株式会社 (134)
【Fターム(参考)】
[ Back to top ]