
超音波画像処理装置
【課題】診断対象内における運動の伝導状況を視覚的に示す。
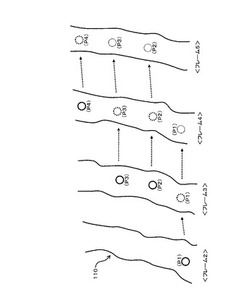
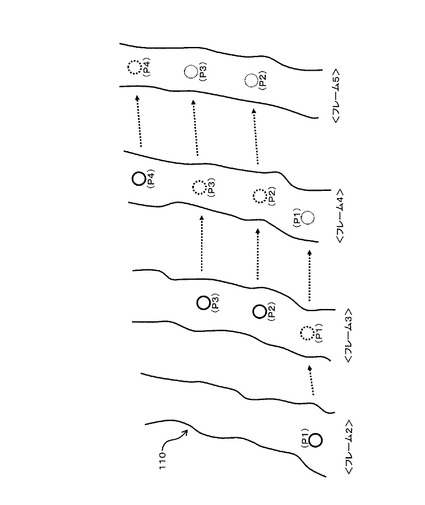
【解決手段】各フレームの心臓110の断層画像には、注目点P1〜P4の表示例が示されている。フレーム2では、フレーム2を特徴時相としている注目点P1のみがマーカで明示される。フレーム3では、フレーム3を特徴時相としている注目点P2,P3のみがマーカで明示される。そのフレーム3において注目点P1の位置にはマーカの残像が形成される。マーカの残像は特徴時相におけるマーカよりも輝度が小さい。フレーム4では、フレーム4を特徴時相としている注目点P4のみがマーカで明示される。そのフレーム4において注目点P1〜P3の位置にマーカの残像が形成される。フレーム4において、注目点P2,P3の残像は、特徴時相におけるマーカよりも輝度が小さく、注目点P1の残像は、フレーム3における残像よりもさらに輝度が小さい。
【解決手段】各フレームの心臓110の断層画像には、注目点P1〜P4の表示例が示されている。フレーム2では、フレーム2を特徴時相としている注目点P1のみがマーカで明示される。フレーム3では、フレーム3を特徴時相としている注目点P2,P3のみがマーカで明示される。そのフレーム3において注目点P1の位置にはマーカの残像が形成される。マーカの残像は特徴時相におけるマーカよりも輝度が小さい。フレーム4では、フレーム4を特徴時相としている注目点P4のみがマーカで明示される。そのフレーム4において注目点P1〜P3の位置にマーカの残像が形成される。フレーム4において、注目点P2,P3の残像は、特徴時相におけるマーカよりも輝度が小さく、注目点P1の残像は、フレーム3における残像よりもさらに輝度が小さい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、超音波画像処理装置に関し、特に、運動する診断対象を表示する装置に関する。
【背景技術】
【0002】
超音波を送受することにより得られる超音波画像を利用して診断対象の運動を評価する技術が知られている。例えば、特許文献1には、超音波画像に対してパターンマッチングの演算を適用して心臓内の関心部位の移動を追跡し、追跡した関心部位の移動の軌跡を表示する旨の技術が記載されている。また、特許文献2には、心臓の超音波画像内に設定された複数の特徴点の移動を追跡し、心臓の収縮や拡張の開始タイミングを検出する旨の技術が記載されている。例えばこれらの技術により、心臓などの診断対象に関する運動を評価することができる。
【0003】
ところが、例えば心臓は、それを全体的に観察すると拡張や収縮を繰り返しているものの、その心臓の動きを詳細に各部位ごとに見ると、全ての部位が一斉に拡張や収縮の動作を開始するのではなく、心臓全体に亘る刺激の伝導に応じて、複数の部位が順に拡張や収縮の運動を開始する。こうした運動の伝導状況から、例えば心筋などを診断しようとする試みがなされており、さらに、そうした診断に適した装置の開発も望まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−177273号公報
【特許文献2】特開2003−250804号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した背景事情において、本願の発明者は、超音波画像を利用した診断対象の運動に関する評価について研究開発を重ねてきた。特に、診断対象内における運動の伝導状況に関する診断に注目した。
【0006】
本発明は、その研究開発の過程において成されたものであり、その目的は、診断対象内における運動の伝導状況を視覚的に示す技術を提供することにある。
【課題を解決するための手段】
【0007】
上記目的にかなう好適な超音波画像処理装置は、超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定部と、運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成部と、各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出部と、運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成部と、を有することを特徴とする。
【0008】
上記装置の診断対象は、例えば生体内の組織であり、具体的には心臓や筋肉や血管などであるが、これらの具体例に限定されない。複数の注目箇所は、診断対象や診断内容に応じて設定されることが望ましく、注目箇所設定部が診断対象の画像内容に基づいて各注目箇所を適宜な位置に設定してもよいし、ユーザが各注目箇所の位置を指定し、そのユーザの操作に応じて注目箇所設定部が各注目箇所を設定してもよい。各注目箇所は、例えば、その注目箇所に対応した画像部分を利用して複数時相に亘って画像内で追跡される。具体的には、例えば相関演算に基づいたパターンマッチングなどを利用して各注目箇所が複数時相に亘って追跡される。また、その追跡結果に基づいて、画像内における各注目箇所の動きを反映した変位情報が生成される。例えば各注目箇所の動きを示す波形データや座標データなどの変位情報が生成される。さらに、変位情報に基づいて各注目箇所ごとに特徴時相が検出される。特徴時相は、例えば診断対象の診断において参考となる時相を基準として設定される。例えば、予め装置に設定された基準に応じて特徴時相が決定されてもよいし、ユーザが設定した基準に応じて特徴時相が決定されてもよい。なお、特徴時相は、全ての注目箇所について同じ基準で設定されることが望ましい。そして、運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所が明示される。例えば、特徴時相においてその注目箇所が他の画像部分とは異なる表示態様とされる。具体的には、特徴時相においてその注目箇所にマークが形成されてもよいし、色や輝度の変化により注目箇所が明示されてもよい。
【0009】
上記の好適な装置によれば、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像が形成されるため、例えば、医師などの検査者がその伝導画像を見ることにより、診断対象内における運動の伝導状況を比較的容易に確認することができる。具体例を挙げるとすれば、上記伝導画像を利用して心臓内における収縮拡張運動の伝導状況を確認することができ、心筋梗塞などの疾患の診断において極めて有用である。もちろん、伝導画像の用途は上記具体例に限定されない。
【0010】
望ましい具体例において、前記変位情報生成部は、基準となる位置から各注目箇所までの距離を複数時相に亘って計測し、各注目箇所ごとにその距離の時間的変化を示した距離変化データを生成し、前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データに基づいて、その注目箇所についての特徴時相を検出する、ことを特徴とする。
【0011】
望ましい具体例において、前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データを微分処理して得られる微分データに基づいて、その注目箇所についての特徴時相を検出する、ことを特徴とする。
【0012】
望ましい具体例において、前記特徴時相検出部は、各注目箇所についての特徴時相として、その注目箇所が運動を開始する時相、その注目箇所が運動を終了する時相、又は、その注目箇所が最も大きく運動する時相を検出する、ことを特徴とする。
【0013】
望ましい具体例において、前記画像形成部は、各注目箇所ごとに特徴時相においてその注目箇所の位置にマーカを形成する、ことを特徴とする。
【0014】
望ましい具体例において、前記画像形成部は、各注目箇所ごとに特徴時相より後の時相においてその注目箇所の位置にマーカの残像を形成する、ことを特徴とする。
【0015】
また、上記目的にかなう好適なプログラムは、超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定機能と、運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成機能と、各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出機能と、運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成機能と、をコンピュータに実現させることを特徴とする。
【0016】
上記プログラムは、例えば、ディスクやメモリなどのコンピュータが読み取り可能な記憶媒体に記憶され、その記憶媒体を介してコンピュータに提供される。もちろん、インターネット等の電気通信回線を介して上記プログラムがコンピュータに提供されてもよい。
【発明の効果】
【0017】
本発明により、診断対象内における運動の伝導状況を視覚的に示す技術が提供される。例えば、本発明の好適な態様によれば、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像が形成されるため、医師などの検査者がその伝導画像を見ることにより、診断対象内における運動の伝導状況を比較的容易に確認することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施において好適な超音波診断装置の全体構成を示す図である。
【図2】複数の注目点の設定を説明するための図である。
【図3】画像データ間のパターンマッチングを説明するための図である。
【図4】複数の注目点Pの追跡結果を示す図である。
【図5】距離変化の計測における固定点の設定を説明するための図である。
【図6】微分データに基づいた特徴時相の検出を説明するための図である。
【図7】複数の注目点Pに関する特徴時相の検出結果を示す図である。
【図8】伝導画像の形成処理を説明するための図である。
【図9】本実施形態における超音波診断装置の処理を纏めたフローチャートである。
【図10】伝導画像形成部における処理を纏めたフローチャートである。
【発明を実施するための形態】
【0019】
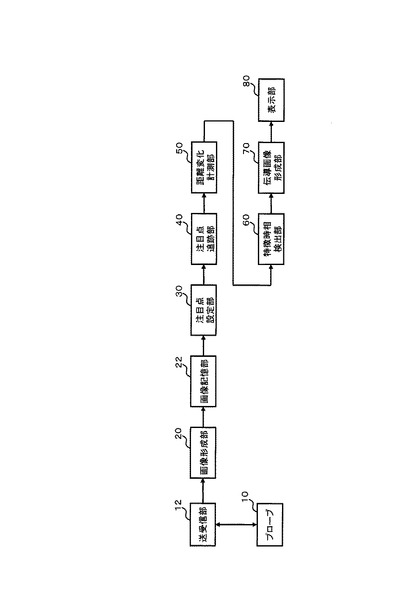
図1は、本発明の実施において好適な超音波診断装置の全体構成を示す図である。図1の超音波診断装置は、本発明に係る超音波画像処理装置の機能を備えている。
【0020】
プローブ10は、例えば心臓や筋肉や血管などの診断対象を含む領域に対して超音波を送受する超音波探触子である。プローブ10は超音波を送受する複数の振動素子を備えており、複数の振動素子が送受信部12によって送信制御されて送信ビームが形成される。また、複数の振動素子が診断対象を含む領域内から得られる超音波を受波し、これにより得られた信号が送受信部12へ出力され、送受信部12が受信ビームを形成して受信ビームに沿ってエコーデータが収集される。
【0021】
プローブ10は、超音波ビーム(送信ビームと受信ビーム)を二次元平面内において走査してエコーデータを収集する。もちろん、超音波ビームを三次元空間内において立体的に走査する三次元プローブが利用されてもよい。
【0022】
診断対象を含む領域内で超音波ビームが走査され、送受信部12によりエコーデータが収集されると、画像形成部20は、収集されたエコーデータに基づいて超音波の画像データを形成する。画像形成部20は、例えばBモード画像の画像データを形成する。また、画像形成部20は、複数の超音波画像に対応した複数の画像データを形成する。例えば、複数の時刻(複数時相)に亘って診断対象を映し出した複数の画像データを形成する。画像形成部20において形成された複数の画像データは画像記憶部22に記憶される。
【0023】
そして、画像記憶部22に記憶された画像データに基づいて、以下に説明する画像処理が実行される。本発明における診断対象は、例えば生体内の組織であり、具体的には心臓や筋肉や血管などが好適である。そこで、診断対象の具体例を心臓として、図1の超音波診断装置による画像処理を以下に詳述する。なお、以下の説明において、図1に示した部分(構成)については図1の符号を利用しつつ、必要に応じて他の図面も参照する。
【0024】
画像形成部20により複数の画像データが形成されて画像記憶部22に記憶されると、注目点設定部30は、画像記憶部22に記憶された画像データ内において、診断対象である心臓に対して複数の注目点を設定する。
【0025】
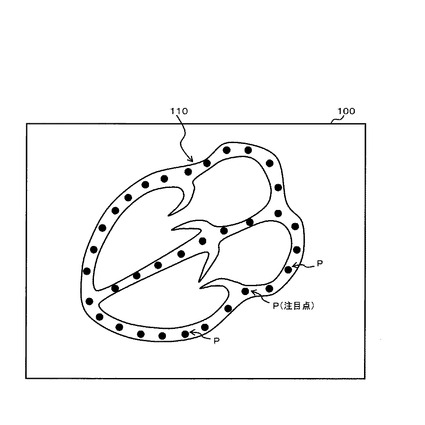
図2は、複数の注目点の設定を説明するための図であり、図2には、心臓110の断面を映し出した超音波画像100が示されている。この超音波画像100は、例えば、画像形成部20により形成された画像データに対応したBモード画像であり、表示部80に表示される。そして、表示部80に表示された超音波画像100を確認しながら、ユーザが心臓110の断面内に複数の注目点Pを設定する。図2において、複数の注目点Pは、塗り潰し円で示されている。
【0026】
複数の注目点Pは、診断において注目すべき箇所に設定される。複数の注目点Pの個数や位置や間隔は診断内容などに応じて適宜に設定することが可能とされる。例えば、ユーザが各注目点Pの位置をマウスやポインタなどの操作デバイスにより次々に指定し、指定された位置に注目点設定部30が各注目点Pを設定する。なお、注目点設定部30が、例えば二値化処理などにより超音波画像100内において心臓110の画像部分を認識し、心臓110の画像上に複数の注目点Pを自動設定してもよい。
【0027】
注目点設定部30により複数の注目点Pが設定されると、それら複数の注目点Pが設定された画像の時相が参照時相とされ、注目点追跡部40は、運動する心臓110の画像データ内において、各注目点Pを複数時相に亘って追跡する。注目点追跡部40は、画像記憶部22に記憶された複数時相の画像データを対象として、注目点設定部30によって設定された各注目点Pごとに、相関演算に基づいて画像データ間のパターンマッチングを行って、各注目点Pの移動先を追跡する。
【0028】
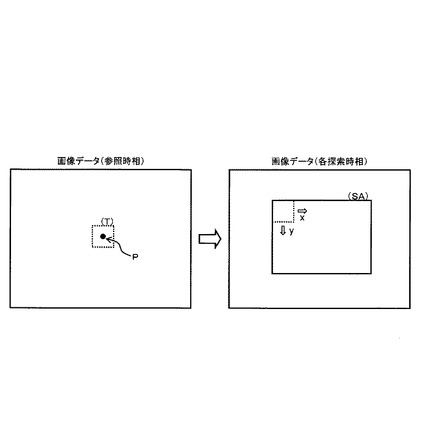
図3は、画像データ間のパターンマッチングを説明するための図であり、参照時相の画像データと各探索時相の画像データとの間における処理を示している。参照時相の画像データと各探索時相の画像データは、例えば同じ心臓から互いに異なる時刻に得られる画像データである。パターンマッチングにおいては、まず、前述のように参照時相の画像データ内に注目点Pが設定される。図3には、複数の注目点P(図2参照)のうちの一つのみが図示されている。
【0029】
注目点追跡部40は、その参照時相の画像データ内において、各注目点Pを取り囲むようにテンプレートTを設定する。図3には、注目点Pを中心とする正方形状のテンプレートTが示されている。テンプレートTの大きさは、例えば、画素数にして縦20ピクセルで横20ピクセル程度である。なお、テンプレートTの大きさや形状や位置は図3の具体例に限定されない。また、テンプレートTの大きさや形状や位置をユーザが変更できるようにしてもよい。
【0030】
テンプレートTが設定されると、注目点追跡部40は、各探索時相の画像データ内において、探索領域SAを設定する。探索領域SAは、例えば、複数の探索時相に亘って画像データ内の同じ位置に固定的に設定される。この場合には、例えば、探索領域SAの大きさや形状も固定的に設定される。なお、探索領域SAの位置を固定するため、探索領域SAの大きさ(広さ)は比較的大きめであることが望ましい。もちろん、各探索時相の画像データの全体を探索領域SAとしてもよい。なお、探索領域SAは、複数の探索時相に亘って、各探索時相ごとに、その探索時相に隣接する時相の画像データ内で探索された移動点の位置を取り囲むように設定されてもよい。
【0031】
テンプレートTと探索領域SAが設定されると、各探索時相の画像データの探索領域SA内においてテンプレートTが移動され、各位置において、参照時相の画像データのテンプレートT内の複数の画素と、各探索時相の画像データのテンプレートTに重なる領域内の複数の画素とに基づいて、相関値が算出される。例えば、図3において探索領域SA内に破線の矩形で示される位置を初期位置とし、その初期位置からx方向とy方向に段階的にテンプレートTを移動させ、各位置において相関値が算出され、探索領域SA内の全域に亘る複数の位置に対応した複数の相関値が算出される。
【0032】
なお、相関値とは画像データ間の相関関係の程度(類似の程度)を示す数値であり、相関値の算出には相関演算の各手法に応じた公知の数式を利用することができる。例えば、位相限定相関法や相互相関法のように、類似の度合が大きいほど大きな値を示す相関値を利用してもよいし、最小和絶対差法のように、類似の度合が大きいほど小さな値を示す相関値を利用してもよい。
【0033】
こうして、探索領域SA内の全域に亘る複数の位置の各々において相関値が算出されると、複数の位置の中から最も類似の度合が大きい位置が特定されて、その位置が注目点Pの移動先である移動点とされる。
【0034】
注目点追跡部40は、図2に示す複数の注目点Pの各々について、図3を利用して説明したパターンマッチング処理を実行し、各注目点Pごとにその注目点Pの移動先である移動点を特定する。さらに、注目点追跡部40は、各注目点Pの移動点を複数の探索時相に亘って次々に特定する。
【0035】
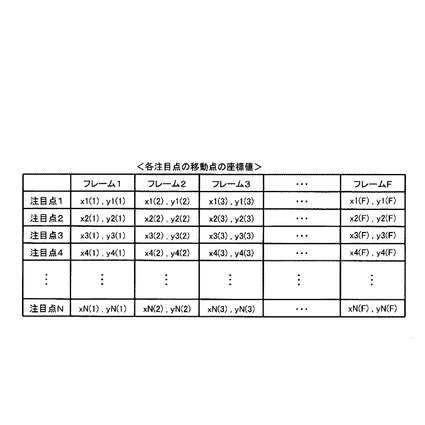
図4は、複数の注目点Pの追跡結果を示す図である。図4には、注目点1から注目点Nまでの各注目点について、複数の時相に亘って追跡された移動点の座標値、つまりフレーム1からフレームFまでの各フレームにおける移動点の座標値が示されている。なお、座標値はXY直交座標系で示されている。例えば、N番目(最後)の注目点Nについて、フレーム1における移動点の座標値はxN(1),yN(1)であり、フレームF(最後)における移動点の座標値はxN(F),yN(F)である。
【0036】
複数の注目点Pの追跡結果が得られると、距離変化計測部50は、その追跡結果に基づいて、各注目点Pごとに距離変化を計測する。その距離変化の計測においては、各注目点Pごとに基準となる固定点が設定される。
【0037】
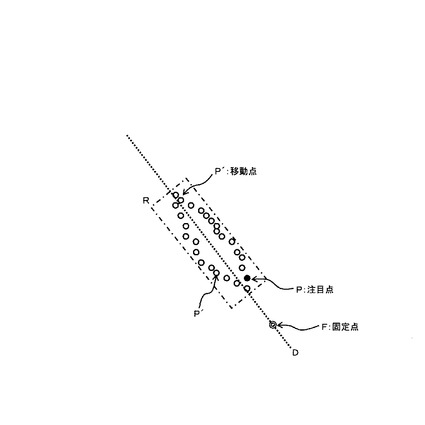
図5は、距離変化の計測における固定点の設定を説明するための図である。図5には、ある1つの注目点Pについて、複数の時相(探索時相)に亘って画像データ内において探索された複数時相の移動点P´が示されている。
【0038】
固定点Fの設定にあたっては、まず、ある注目点Pに関する複数時相の移動点P´に基づいて、その注目点Pの複数時相に亘る移動の主方向が決定される。例えば、図5に示すように複数の移動点P´の全てを取り囲み、4辺に対応した移動点P´に外接する長方形Rが設定され、その長方形Rの中心を通る長軸が主方向Dとされる。もちろん、主方向Dの決定は長方形Rを利用する方法に限定されない。例えば、主成分分析と呼ばれる公知の手法を利用して、移動点P´の空間的なばらつきを最もよく表す方向、つまり移動点P´の分散が最大となる方向を主方向Dとしてもよい。
【0039】
そして、決定された主方向D上に固定点Fが設定される。固定点Fは、各注目点Pごとに設定されるが、複数の注目点Pについて統一的な基準で設定される。例えば、複数の注目点Pの全てについて、固定点Fが心臓の心筋の外側に設定される。固定点Fが設定されると、距離変化計測部50は、各注目点Pごとに、その注目点Pに対応した固定点Fを基準として、固定点Fから各移動点P´までの距離を算出し、各注目点Pごとに複数の時相に亘るその距離の変化を示した距離変化データを生成する。
【0040】
距離変化計測部50により距離変化データが生成されると、特徴時相検出部60は、各注目点Pごとに、距離変化データから特徴時相を検出する。例えば、特徴時相検出部60は、距離変化データを微分処理して得られる微分データに基づいて、各注目点Pについての特徴時相を検出する。
【0041】
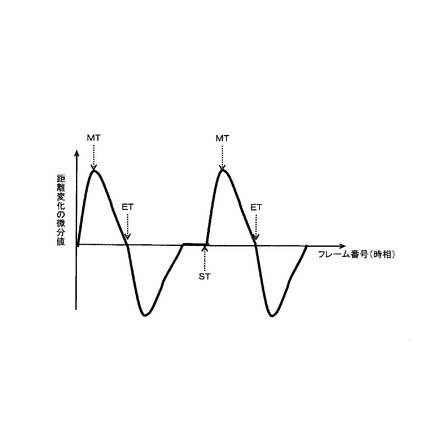
図6は、微分データに基づいた特徴時相の検出を説明するための図である。図6には、横軸をフレーム番号つまり時相とし、縦軸を距離変化の微分値とした微分データの波形(微分波形)が示されている。図6に示す微分波形は、各注目点ごとに、その注目点に関する距離変化データを時間(時相)方向に微分処理して得られる。
【0042】
また、図6に示す微分波形は、固定点F(図5参照)を心筋の外側に設定した場合の波形である。従って、距離変化の微分値が正の領域では、移動点が固定点Fから遠ざかる方向に移動しており、心臓が収縮運動状態にある。その一方、距離変化の微分値が負の領域では、移動点が固定点Fに近づく方向に移動しており、心臓が拡張運動状態にある。
【0043】
各注目点についての特徴時相としては、その注目点が収縮運動を開始する時相STや、その注目点が収縮運動を終了する時相ETや、その注目点が最も大きく(速く)収縮運動する時相MTなどのうちのいずれかが選択される。ちなみに、収縮運動を開始する時相STは、距離変化の微分値が負から正に変化する場合のゼロクロス点のタイミングとして検出され、収縮運動を終了する時相ETは、距離変化の微分値が正から負に変化する場合のゼロクロス点のタイミングとして検出される。
【0044】
また、例えばユーザがこれらの時相の中から特徴時相を選択するようにしてもよい。もちろん、各注目点についての特徴時相として、その注目点が拡張運動を開始する時相や、その注目点が拡張運動を終了する時相や、その注目点が最も大きく(速く)拡張運動する時相などが選択されてもよい。
【0045】
但し、全ての注目点について同じ基準で特徴時相を選択することが望ましい。例えば、全ての注目点について、収縮運動を開始する時相STが特徴時相とされる。そして、特徴時相検出部60は、図6に示す微分波形から特徴時相を検出する。つまり、特徴時相検出部60は、各注目点ごとに、選択された特徴時相に相当するフレーム番号を検出する。
【0046】
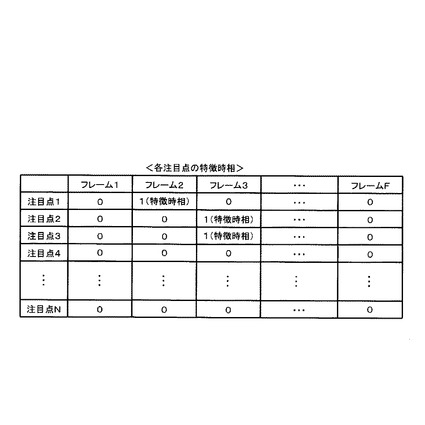
図7は、複数の注目点Pに関する特徴時相の検出結果を示す図である。図7には、注目点1から注目点Nまでの各注目点について特徴時相の検出結果が示されている。つまり、特徴時相のフレームにおいて検出フラグが「1」とされ、それ以外のフレームにおいて検出フラグが「0」とされている。例えば図7に示す例において、注目点1についてはフレーム2が特徴時相であり、注目点2と注目点3についてはフレーム3が特徴時相である。
【0047】
特徴時相検出部60により各注目点ごとに特徴時相が検出されると、伝導画像形成部70は、診断対象である心臓内において、複数の注目点に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する。伝導画像形成部70は、複数時相に亘って運動する心臓の画像内において、各注目点ごとに特徴時相においてその注目点を明示することにより、伝導画像を形成する。
【0048】
図8は、伝導画像の形成処理を説明するための図である。図8には、複数時相に亘る心臓110の画像、つまり、フレーム2からフレーム5までの各フレームにおける心臓110の断層画像の一部が示されている。各フレームの心臓110の断層画像内には、伝導画像における注目点P1〜P4の表示例が図示されている。図8に示す表示例は、図7の検出結果に基づいて得られる表示例であり、図7における注目点1〜4が、それぞれ、図8における注目点P1〜P4に対応している。
【0049】
伝導画像形成部70は、心臓110の画像内において、各注目点ごとに特徴時相においてその注目点を明示することにより伝導画像を形成する。例えば、各注目点ごとに特徴時相においてその注目点の位置にマーカが形成される。さらに、各注目点ごとに特徴時相より後の時相においてその注目点の位置にマーカの残像が形成される。
【0050】
例えば、図8の表示例において、フレーム2では、注目点P1のみがマーカで明示されている。つまり、図7の検出結果において、フレーム2を特徴時相としているのは、注目点1のみであるためである。また、図8の表示例において、フレーム3では注目点P2,P3がマーカで明示されている。つまり、図7の検出結果において、フレーム3を特徴時相としているのは、注目点2,3のみであるためである。なお、そのフレーム3において注目点P1の位置(移動点の座標:図4参照)にマーカの残像が形成される。マーカの残像は、例えば特徴時相におけるマーカよりも輝度を小さくした画像である。
【0051】
さらに、図8の表示例のフレーム4では、注目点P4がマーカで明示されている。つまり、図7の検出結果では図示省略されているが、フレーム4を特徴時相としているのは、注目点4のみであるためである。なお、そのフレーム4において注目点P1〜P3の位置(移動点の座標:図4参照)にマーカの残像が形成される。フレーム4の注目点P2,P3の残像は、特徴時相であるフレーム3におけるマーカよりも輝度を小さくした画像である。また、フレーム4の注目点P1の残像は、直前のフレーム3における残像よりもさらに輝度を小さくした画像である。つまり、特徴時相から時相が進むに従って残像の輝度が小さくなる。
【0052】
そして、図8の表示例のフレーム5では、特徴時相として明示される注目点は無く、注目点P2〜P4の位置(移動点の座標:図4参照)にマーカの残像が形成される。なお、フレーム5においては、注目点P1の残像が無くなっている。
【0053】
伝導画像形成部70は、心臓110の画像の全域において(図2参照)、つまり注目点1〜Nについて(図7参照)、フレーム1〜Fまでの複数フレームの画像を対象として、図8を利用して説明した処理で伝導画像を形成する。こうして、心臓110内で複数の注目点に亘って運動が伝導する様子を視覚的に示した伝導画像が形成され、形成された伝導画像が表示部80に表示される。これにより、例えば、特徴時相として収縮運動を開始する時相(図6参照)が設定されていれば、伝導画像を利用して心臓110内において収縮運動が段階的に開始される様子を視覚的に確認することができ、心筋梗塞などの疾患の診断において極めて有用である。
【0054】
なお、図8の表示例では、各注目点ごとに特徴時相より後の時相においてその注目点の位置にマーカの輝度を小さくした残像を形成しているが、特徴時相におけるマーカの輝度を維持して残像を形成してもよい。また、残像を形成せずに、特徴時相のみを明示するようにしてもよい。
【0055】
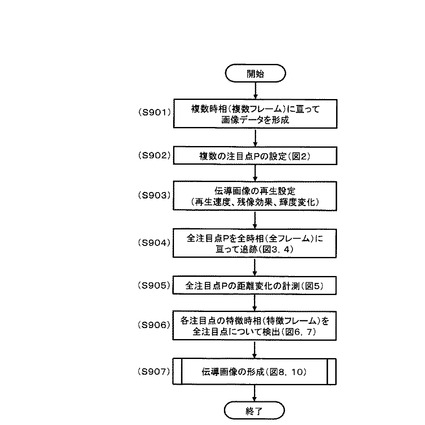
図9は、本実施形態における超音波診断装置の処理を纏めたフローチャートである。まず、例えば診断対象の一例である心臓について、複数時相に亘って、つまり複数フレームに亘って、画像データが形成される(S901)。次に、注目点設定部30が、例えばユーザ操作に応じて、診断対象の一例である心臓の断面内に複数の注目点Pを設定する(S902:図2参照)。次に、例えばユーザ操作に応じて、伝導画像の再生に関する各種の設定が行われる(S903)。この設定において、例えば、通常速度再生やスロー再生や早送り再生や逆再生などの伝導画像の再生速度設定、伝導画像の残像効果の有無、残像に関する輝度変化の有無などが設定される。
【0056】
そして、注目点追跡部40が、処理対象となる全ての注目点Pについて、処理対象となる全時相(全フレーム)に亘って、例えばパターンマッチング処理により移動点を追跡する(S904:図3,4参照)。次に、追跡結果に基づいて、距離変化計測部50が、各注目点Pごとに基準となる固定点を設定して各注目点Pごとに距離変化を計測する(S905:図5参照)。次に、特徴時相検出部60が、距離変化のデータを微分処理して得られる微分データに基づいて、各注目点Pについての特徴時相(特徴フレーム)を検出する(S906:図6,7参照)。
【0057】
こうして、処理対象となる全注目点Pについて特徴時相が検出されると、その検出結果に基づいて、伝導画像形成部70が伝導画像を形成する(S907:図8,10参照)。
【0058】
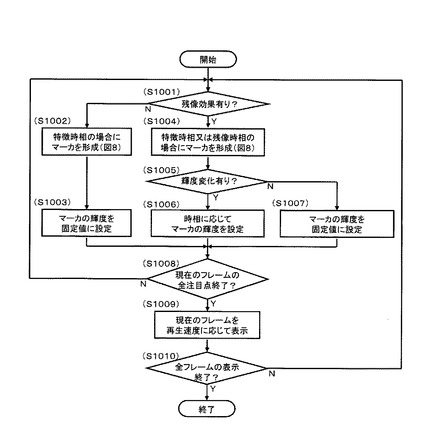
図10は、伝導画像形成部70における処理を纏めたフローチャートである。まず、残像効果の有無の設定、つまりS903(図9)における設定が確認され(S1001)、残像効果が無しに設定されていれば、S1002へ進み、処理対象となっている現在のフレーム(時相)が、処理対象となっている現在の注目点Pの特徴時相である場合にのみ、その注目点Pの画像位置にマーカが形成される(S1002:図8参照)。なお、マーカの輝度は固定値に設定される(S1003)。例えば表示可能な最高輝度にマーカの輝度が設定される。
【0059】
一方、S1001の確認において、残像効果が有りに設定されていれば、S1004へ進み、現在のフレーム(時相)が、現在の注目点Pの特徴時相または残像時相である場合に、その注目点Pの画像位置にマーカが形成される(S1004:図8参照)。例えば、次式の関係を満たす場合に、S1004においてマーカが形成される。次式における残像時相数は、例えば、ユーザにより設定されるか、又は、予め装置に設定された値が利用される。
【0060】
[数1]特徴時相≦現在の時相(現在のフレーム)<特徴時相+残像時相数
【0061】
次に、輝度変化の有無の設定、つまりS903(図9)における設定が確認され(S1005)、輝度変化が有りに設定されていれば、時相に応じてマーカの輝度が設定される(S1006)。例えば、次式によりマーカの輝度が設定される。
【0062】
[数2]マーカの輝度=表示可能な最高輝度−(現在の時相−特徴時相)×k
【0063】
なお、上式において、現在の時相と特徴時相との間の時相差に乗じられるkは、輝度調整のための係数であり、例えば、ユーザにより設定されるか、又は、予め装置に設定された値が利用される。また、上式により算出されるマーカの輝度が、表示可能な最低輝度よりも小さくなる場合には、マーカ(マーカの残像)は形成されない。
【0064】
一方、S1005の確認において、輝度変化が無しに設定されていれば、マーカの輝度は固定値に設定される(S1007)。つまり、特徴時相と全ての残像時相においてマーカの輝度が固定値とされる。例えば、表示可能な最高輝度にマーカの輝度が設定される。
【0065】
そして、処理対象となっている現在のフレーム(時相)において、処理対象となる全ての注目点に関する処理が終了したか否かが確認され(S1008)、終了していなければS1001に戻り、次の注目点についてS1001からS1007までの処理が実行される。
【0066】
S1001からS1007までの処理が繰り返し実行され、S1008において全ての注目点に関する処理の終了が確認されると、現在のフレームに対応した伝導画像が表示される(S1009)。なお、伝導画像は、S903(図9)において設定された再生速度に応じて表示される。
【0067】
さらに、処理対象となる全てのフレームに関する処理が終了したか否かが確認され(S1010)、終了していなければ、S1001に戻り、次のフレームについてS1001からS1009までの処理が実行される。こうして、S1001からS1009までの処理が繰り返し実行され、S1010において全てのフレームに関する処理の終了が確認されると、伝導画像形成部70における処理が終了する。
【0068】
以上、本発明の好適な実施形態である超音波診断装置について説明したが、例えば、図9と図10を利用して説明した処理の一部または全てに対応したプログラムにより、図1に示した注目点設定部30から伝導画像形成部70までの機能の一部または全てをコンピュータで実現し、そのコンピュータを超音波画像処理装置として機能させてもよい。
【0069】
なお、上述した実施形態は、あらゆる点で単なる例示にすぎず、本発明の範囲を限定するものではない。本発明は、その本質を逸脱しない範囲で各種の変形形態を包含する。
【符号の説明】
【0070】
10 プローブ、20 画像形成部、30 注目点設定部、40 注目点追跡部、50 距離変化計測部、60 特徴時相検出部、70 伝導画像形成部。
【技術分野】
【0001】
本発明は、超音波画像処理装置に関し、特に、運動する診断対象を表示する装置に関する。
【背景技術】
【0002】
超音波を送受することにより得られる超音波画像を利用して診断対象の運動を評価する技術が知られている。例えば、特許文献1には、超音波画像に対してパターンマッチングの演算を適用して心臓内の関心部位の移動を追跡し、追跡した関心部位の移動の軌跡を表示する旨の技術が記載されている。また、特許文献2には、心臓の超音波画像内に設定された複数の特徴点の移動を追跡し、心臓の収縮や拡張の開始タイミングを検出する旨の技術が記載されている。例えばこれらの技術により、心臓などの診断対象に関する運動を評価することができる。
【0003】
ところが、例えば心臓は、それを全体的に観察すると拡張や収縮を繰り返しているものの、その心臓の動きを詳細に各部位ごとに見ると、全ての部位が一斉に拡張や収縮の動作を開始するのではなく、心臓全体に亘る刺激の伝導に応じて、複数の部位が順に拡張や収縮の運動を開始する。こうした運動の伝導状況から、例えば心筋などを診断しようとする試みがなされており、さらに、そうした診断に適した装置の開発も望まれている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−177273号公報
【特許文献2】特開2003−250804号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した背景事情において、本願の発明者は、超音波画像を利用した診断対象の運動に関する評価について研究開発を重ねてきた。特に、診断対象内における運動の伝導状況に関する診断に注目した。
【0006】
本発明は、その研究開発の過程において成されたものであり、その目的は、診断対象内における運動の伝導状況を視覚的に示す技術を提供することにある。
【課題を解決するための手段】
【0007】
上記目的にかなう好適な超音波画像処理装置は、超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定部と、運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成部と、各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出部と、運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成部と、を有することを特徴とする。
【0008】
上記装置の診断対象は、例えば生体内の組織であり、具体的には心臓や筋肉や血管などであるが、これらの具体例に限定されない。複数の注目箇所は、診断対象や診断内容に応じて設定されることが望ましく、注目箇所設定部が診断対象の画像内容に基づいて各注目箇所を適宜な位置に設定してもよいし、ユーザが各注目箇所の位置を指定し、そのユーザの操作に応じて注目箇所設定部が各注目箇所を設定してもよい。各注目箇所は、例えば、その注目箇所に対応した画像部分を利用して複数時相に亘って画像内で追跡される。具体的には、例えば相関演算に基づいたパターンマッチングなどを利用して各注目箇所が複数時相に亘って追跡される。また、その追跡結果に基づいて、画像内における各注目箇所の動きを反映した変位情報が生成される。例えば各注目箇所の動きを示す波形データや座標データなどの変位情報が生成される。さらに、変位情報に基づいて各注目箇所ごとに特徴時相が検出される。特徴時相は、例えば診断対象の診断において参考となる時相を基準として設定される。例えば、予め装置に設定された基準に応じて特徴時相が決定されてもよいし、ユーザが設定した基準に応じて特徴時相が決定されてもよい。なお、特徴時相は、全ての注目箇所について同じ基準で設定されることが望ましい。そして、運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所が明示される。例えば、特徴時相においてその注目箇所が他の画像部分とは異なる表示態様とされる。具体的には、特徴時相においてその注目箇所にマークが形成されてもよいし、色や輝度の変化により注目箇所が明示されてもよい。
【0009】
上記の好適な装置によれば、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像が形成されるため、例えば、医師などの検査者がその伝導画像を見ることにより、診断対象内における運動の伝導状況を比較的容易に確認することができる。具体例を挙げるとすれば、上記伝導画像を利用して心臓内における収縮拡張運動の伝導状況を確認することができ、心筋梗塞などの疾患の診断において極めて有用である。もちろん、伝導画像の用途は上記具体例に限定されない。
【0010】
望ましい具体例において、前記変位情報生成部は、基準となる位置から各注目箇所までの距離を複数時相に亘って計測し、各注目箇所ごとにその距離の時間的変化を示した距離変化データを生成し、前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データに基づいて、その注目箇所についての特徴時相を検出する、ことを特徴とする。
【0011】
望ましい具体例において、前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データを微分処理して得られる微分データに基づいて、その注目箇所についての特徴時相を検出する、ことを特徴とする。
【0012】
望ましい具体例において、前記特徴時相検出部は、各注目箇所についての特徴時相として、その注目箇所が運動を開始する時相、その注目箇所が運動を終了する時相、又は、その注目箇所が最も大きく運動する時相を検出する、ことを特徴とする。
【0013】
望ましい具体例において、前記画像形成部は、各注目箇所ごとに特徴時相においてその注目箇所の位置にマーカを形成する、ことを特徴とする。
【0014】
望ましい具体例において、前記画像形成部は、各注目箇所ごとに特徴時相より後の時相においてその注目箇所の位置にマーカの残像を形成する、ことを特徴とする。
【0015】
また、上記目的にかなう好適なプログラムは、超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定機能と、運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成機能と、各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出機能と、運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成機能と、をコンピュータに実現させることを特徴とする。
【0016】
上記プログラムは、例えば、ディスクやメモリなどのコンピュータが読み取り可能な記憶媒体に記憶され、その記憶媒体を介してコンピュータに提供される。もちろん、インターネット等の電気通信回線を介して上記プログラムがコンピュータに提供されてもよい。
【発明の効果】
【0017】
本発明により、診断対象内における運動の伝導状況を視覚的に示す技術が提供される。例えば、本発明の好適な態様によれば、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像が形成されるため、医師などの検査者がその伝導画像を見ることにより、診断対象内における運動の伝導状況を比較的容易に確認することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施において好適な超音波診断装置の全体構成を示す図である。
【図2】複数の注目点の設定を説明するための図である。
【図3】画像データ間のパターンマッチングを説明するための図である。
【図4】複数の注目点Pの追跡結果を示す図である。
【図5】距離変化の計測における固定点の設定を説明するための図である。
【図6】微分データに基づいた特徴時相の検出を説明するための図である。
【図7】複数の注目点Pに関する特徴時相の検出結果を示す図である。
【図8】伝導画像の形成処理を説明するための図である。
【図9】本実施形態における超音波診断装置の処理を纏めたフローチャートである。
【図10】伝導画像形成部における処理を纏めたフローチャートである。
【発明を実施するための形態】
【0019】
図1は、本発明の実施において好適な超音波診断装置の全体構成を示す図である。図1の超音波診断装置は、本発明に係る超音波画像処理装置の機能を備えている。
【0020】
プローブ10は、例えば心臓や筋肉や血管などの診断対象を含む領域に対して超音波を送受する超音波探触子である。プローブ10は超音波を送受する複数の振動素子を備えており、複数の振動素子が送受信部12によって送信制御されて送信ビームが形成される。また、複数の振動素子が診断対象を含む領域内から得られる超音波を受波し、これにより得られた信号が送受信部12へ出力され、送受信部12が受信ビームを形成して受信ビームに沿ってエコーデータが収集される。
【0021】
プローブ10は、超音波ビーム(送信ビームと受信ビーム)を二次元平面内において走査してエコーデータを収集する。もちろん、超音波ビームを三次元空間内において立体的に走査する三次元プローブが利用されてもよい。
【0022】
診断対象を含む領域内で超音波ビームが走査され、送受信部12によりエコーデータが収集されると、画像形成部20は、収集されたエコーデータに基づいて超音波の画像データを形成する。画像形成部20は、例えばBモード画像の画像データを形成する。また、画像形成部20は、複数の超音波画像に対応した複数の画像データを形成する。例えば、複数の時刻(複数時相)に亘って診断対象を映し出した複数の画像データを形成する。画像形成部20において形成された複数の画像データは画像記憶部22に記憶される。
【0023】
そして、画像記憶部22に記憶された画像データに基づいて、以下に説明する画像処理が実行される。本発明における診断対象は、例えば生体内の組織であり、具体的には心臓や筋肉や血管などが好適である。そこで、診断対象の具体例を心臓として、図1の超音波診断装置による画像処理を以下に詳述する。なお、以下の説明において、図1に示した部分(構成)については図1の符号を利用しつつ、必要に応じて他の図面も参照する。
【0024】
画像形成部20により複数の画像データが形成されて画像記憶部22に記憶されると、注目点設定部30は、画像記憶部22に記憶された画像データ内において、診断対象である心臓に対して複数の注目点を設定する。
【0025】
図2は、複数の注目点の設定を説明するための図であり、図2には、心臓110の断面を映し出した超音波画像100が示されている。この超音波画像100は、例えば、画像形成部20により形成された画像データに対応したBモード画像であり、表示部80に表示される。そして、表示部80に表示された超音波画像100を確認しながら、ユーザが心臓110の断面内に複数の注目点Pを設定する。図2において、複数の注目点Pは、塗り潰し円で示されている。
【0026】
複数の注目点Pは、診断において注目すべき箇所に設定される。複数の注目点Pの個数や位置や間隔は診断内容などに応じて適宜に設定することが可能とされる。例えば、ユーザが各注目点Pの位置をマウスやポインタなどの操作デバイスにより次々に指定し、指定された位置に注目点設定部30が各注目点Pを設定する。なお、注目点設定部30が、例えば二値化処理などにより超音波画像100内において心臓110の画像部分を認識し、心臓110の画像上に複数の注目点Pを自動設定してもよい。
【0027】
注目点設定部30により複数の注目点Pが設定されると、それら複数の注目点Pが設定された画像の時相が参照時相とされ、注目点追跡部40は、運動する心臓110の画像データ内において、各注目点Pを複数時相に亘って追跡する。注目点追跡部40は、画像記憶部22に記憶された複数時相の画像データを対象として、注目点設定部30によって設定された各注目点Pごとに、相関演算に基づいて画像データ間のパターンマッチングを行って、各注目点Pの移動先を追跡する。
【0028】
図3は、画像データ間のパターンマッチングを説明するための図であり、参照時相の画像データと各探索時相の画像データとの間における処理を示している。参照時相の画像データと各探索時相の画像データは、例えば同じ心臓から互いに異なる時刻に得られる画像データである。パターンマッチングにおいては、まず、前述のように参照時相の画像データ内に注目点Pが設定される。図3には、複数の注目点P(図2参照)のうちの一つのみが図示されている。
【0029】
注目点追跡部40は、その参照時相の画像データ内において、各注目点Pを取り囲むようにテンプレートTを設定する。図3には、注目点Pを中心とする正方形状のテンプレートTが示されている。テンプレートTの大きさは、例えば、画素数にして縦20ピクセルで横20ピクセル程度である。なお、テンプレートTの大きさや形状や位置は図3の具体例に限定されない。また、テンプレートTの大きさや形状や位置をユーザが変更できるようにしてもよい。
【0030】
テンプレートTが設定されると、注目点追跡部40は、各探索時相の画像データ内において、探索領域SAを設定する。探索領域SAは、例えば、複数の探索時相に亘って画像データ内の同じ位置に固定的に設定される。この場合には、例えば、探索領域SAの大きさや形状も固定的に設定される。なお、探索領域SAの位置を固定するため、探索領域SAの大きさ(広さ)は比較的大きめであることが望ましい。もちろん、各探索時相の画像データの全体を探索領域SAとしてもよい。なお、探索領域SAは、複数の探索時相に亘って、各探索時相ごとに、その探索時相に隣接する時相の画像データ内で探索された移動点の位置を取り囲むように設定されてもよい。
【0031】
テンプレートTと探索領域SAが設定されると、各探索時相の画像データの探索領域SA内においてテンプレートTが移動され、各位置において、参照時相の画像データのテンプレートT内の複数の画素と、各探索時相の画像データのテンプレートTに重なる領域内の複数の画素とに基づいて、相関値が算出される。例えば、図3において探索領域SA内に破線の矩形で示される位置を初期位置とし、その初期位置からx方向とy方向に段階的にテンプレートTを移動させ、各位置において相関値が算出され、探索領域SA内の全域に亘る複数の位置に対応した複数の相関値が算出される。
【0032】
なお、相関値とは画像データ間の相関関係の程度(類似の程度)を示す数値であり、相関値の算出には相関演算の各手法に応じた公知の数式を利用することができる。例えば、位相限定相関法や相互相関法のように、類似の度合が大きいほど大きな値を示す相関値を利用してもよいし、最小和絶対差法のように、類似の度合が大きいほど小さな値を示す相関値を利用してもよい。
【0033】
こうして、探索領域SA内の全域に亘る複数の位置の各々において相関値が算出されると、複数の位置の中から最も類似の度合が大きい位置が特定されて、その位置が注目点Pの移動先である移動点とされる。
【0034】
注目点追跡部40は、図2に示す複数の注目点Pの各々について、図3を利用して説明したパターンマッチング処理を実行し、各注目点Pごとにその注目点Pの移動先である移動点を特定する。さらに、注目点追跡部40は、各注目点Pの移動点を複数の探索時相に亘って次々に特定する。
【0035】
図4は、複数の注目点Pの追跡結果を示す図である。図4には、注目点1から注目点Nまでの各注目点について、複数の時相に亘って追跡された移動点の座標値、つまりフレーム1からフレームFまでの各フレームにおける移動点の座標値が示されている。なお、座標値はXY直交座標系で示されている。例えば、N番目(最後)の注目点Nについて、フレーム1における移動点の座標値はxN(1),yN(1)であり、フレームF(最後)における移動点の座標値はxN(F),yN(F)である。
【0036】
複数の注目点Pの追跡結果が得られると、距離変化計測部50は、その追跡結果に基づいて、各注目点Pごとに距離変化を計測する。その距離変化の計測においては、各注目点Pごとに基準となる固定点が設定される。
【0037】
図5は、距離変化の計測における固定点の設定を説明するための図である。図5には、ある1つの注目点Pについて、複数の時相(探索時相)に亘って画像データ内において探索された複数時相の移動点P´が示されている。
【0038】
固定点Fの設定にあたっては、まず、ある注目点Pに関する複数時相の移動点P´に基づいて、その注目点Pの複数時相に亘る移動の主方向が決定される。例えば、図5に示すように複数の移動点P´の全てを取り囲み、4辺に対応した移動点P´に外接する長方形Rが設定され、その長方形Rの中心を通る長軸が主方向Dとされる。もちろん、主方向Dの決定は長方形Rを利用する方法に限定されない。例えば、主成分分析と呼ばれる公知の手法を利用して、移動点P´の空間的なばらつきを最もよく表す方向、つまり移動点P´の分散が最大となる方向を主方向Dとしてもよい。
【0039】
そして、決定された主方向D上に固定点Fが設定される。固定点Fは、各注目点Pごとに設定されるが、複数の注目点Pについて統一的な基準で設定される。例えば、複数の注目点Pの全てについて、固定点Fが心臓の心筋の外側に設定される。固定点Fが設定されると、距離変化計測部50は、各注目点Pごとに、その注目点Pに対応した固定点Fを基準として、固定点Fから各移動点P´までの距離を算出し、各注目点Pごとに複数の時相に亘るその距離の変化を示した距離変化データを生成する。
【0040】
距離変化計測部50により距離変化データが生成されると、特徴時相検出部60は、各注目点Pごとに、距離変化データから特徴時相を検出する。例えば、特徴時相検出部60は、距離変化データを微分処理して得られる微分データに基づいて、各注目点Pについての特徴時相を検出する。
【0041】
図6は、微分データに基づいた特徴時相の検出を説明するための図である。図6には、横軸をフレーム番号つまり時相とし、縦軸を距離変化の微分値とした微分データの波形(微分波形)が示されている。図6に示す微分波形は、各注目点ごとに、その注目点に関する距離変化データを時間(時相)方向に微分処理して得られる。
【0042】
また、図6に示す微分波形は、固定点F(図5参照)を心筋の外側に設定した場合の波形である。従って、距離変化の微分値が正の領域では、移動点が固定点Fから遠ざかる方向に移動しており、心臓が収縮運動状態にある。その一方、距離変化の微分値が負の領域では、移動点が固定点Fに近づく方向に移動しており、心臓が拡張運動状態にある。
【0043】
各注目点についての特徴時相としては、その注目点が収縮運動を開始する時相STや、その注目点が収縮運動を終了する時相ETや、その注目点が最も大きく(速く)収縮運動する時相MTなどのうちのいずれかが選択される。ちなみに、収縮運動を開始する時相STは、距離変化の微分値が負から正に変化する場合のゼロクロス点のタイミングとして検出され、収縮運動を終了する時相ETは、距離変化の微分値が正から負に変化する場合のゼロクロス点のタイミングとして検出される。
【0044】
また、例えばユーザがこれらの時相の中から特徴時相を選択するようにしてもよい。もちろん、各注目点についての特徴時相として、その注目点が拡張運動を開始する時相や、その注目点が拡張運動を終了する時相や、その注目点が最も大きく(速く)拡張運動する時相などが選択されてもよい。
【0045】
但し、全ての注目点について同じ基準で特徴時相を選択することが望ましい。例えば、全ての注目点について、収縮運動を開始する時相STが特徴時相とされる。そして、特徴時相検出部60は、図6に示す微分波形から特徴時相を検出する。つまり、特徴時相検出部60は、各注目点ごとに、選択された特徴時相に相当するフレーム番号を検出する。
【0046】
図7は、複数の注目点Pに関する特徴時相の検出結果を示す図である。図7には、注目点1から注目点Nまでの各注目点について特徴時相の検出結果が示されている。つまり、特徴時相のフレームにおいて検出フラグが「1」とされ、それ以外のフレームにおいて検出フラグが「0」とされている。例えば図7に示す例において、注目点1についてはフレーム2が特徴時相であり、注目点2と注目点3についてはフレーム3が特徴時相である。
【0047】
特徴時相検出部60により各注目点ごとに特徴時相が検出されると、伝導画像形成部70は、診断対象である心臓内において、複数の注目点に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する。伝導画像形成部70は、複数時相に亘って運動する心臓の画像内において、各注目点ごとに特徴時相においてその注目点を明示することにより、伝導画像を形成する。
【0048】
図8は、伝導画像の形成処理を説明するための図である。図8には、複数時相に亘る心臓110の画像、つまり、フレーム2からフレーム5までの各フレームにおける心臓110の断層画像の一部が示されている。各フレームの心臓110の断層画像内には、伝導画像における注目点P1〜P4の表示例が図示されている。図8に示す表示例は、図7の検出結果に基づいて得られる表示例であり、図7における注目点1〜4が、それぞれ、図8における注目点P1〜P4に対応している。
【0049】
伝導画像形成部70は、心臓110の画像内において、各注目点ごとに特徴時相においてその注目点を明示することにより伝導画像を形成する。例えば、各注目点ごとに特徴時相においてその注目点の位置にマーカが形成される。さらに、各注目点ごとに特徴時相より後の時相においてその注目点の位置にマーカの残像が形成される。
【0050】
例えば、図8の表示例において、フレーム2では、注目点P1のみがマーカで明示されている。つまり、図7の検出結果において、フレーム2を特徴時相としているのは、注目点1のみであるためである。また、図8の表示例において、フレーム3では注目点P2,P3がマーカで明示されている。つまり、図7の検出結果において、フレーム3を特徴時相としているのは、注目点2,3のみであるためである。なお、そのフレーム3において注目点P1の位置(移動点の座標:図4参照)にマーカの残像が形成される。マーカの残像は、例えば特徴時相におけるマーカよりも輝度を小さくした画像である。
【0051】
さらに、図8の表示例のフレーム4では、注目点P4がマーカで明示されている。つまり、図7の検出結果では図示省略されているが、フレーム4を特徴時相としているのは、注目点4のみであるためである。なお、そのフレーム4において注目点P1〜P3の位置(移動点の座標:図4参照)にマーカの残像が形成される。フレーム4の注目点P2,P3の残像は、特徴時相であるフレーム3におけるマーカよりも輝度を小さくした画像である。また、フレーム4の注目点P1の残像は、直前のフレーム3における残像よりもさらに輝度を小さくした画像である。つまり、特徴時相から時相が進むに従って残像の輝度が小さくなる。
【0052】
そして、図8の表示例のフレーム5では、特徴時相として明示される注目点は無く、注目点P2〜P4の位置(移動点の座標:図4参照)にマーカの残像が形成される。なお、フレーム5においては、注目点P1の残像が無くなっている。
【0053】
伝導画像形成部70は、心臓110の画像の全域において(図2参照)、つまり注目点1〜Nについて(図7参照)、フレーム1〜Fまでの複数フレームの画像を対象として、図8を利用して説明した処理で伝導画像を形成する。こうして、心臓110内で複数の注目点に亘って運動が伝導する様子を視覚的に示した伝導画像が形成され、形成された伝導画像が表示部80に表示される。これにより、例えば、特徴時相として収縮運動を開始する時相(図6参照)が設定されていれば、伝導画像を利用して心臓110内において収縮運動が段階的に開始される様子を視覚的に確認することができ、心筋梗塞などの疾患の診断において極めて有用である。
【0054】
なお、図8の表示例では、各注目点ごとに特徴時相より後の時相においてその注目点の位置にマーカの輝度を小さくした残像を形成しているが、特徴時相におけるマーカの輝度を維持して残像を形成してもよい。また、残像を形成せずに、特徴時相のみを明示するようにしてもよい。
【0055】
図9は、本実施形態における超音波診断装置の処理を纏めたフローチャートである。まず、例えば診断対象の一例である心臓について、複数時相に亘って、つまり複数フレームに亘って、画像データが形成される(S901)。次に、注目点設定部30が、例えばユーザ操作に応じて、診断対象の一例である心臓の断面内に複数の注目点Pを設定する(S902:図2参照)。次に、例えばユーザ操作に応じて、伝導画像の再生に関する各種の設定が行われる(S903)。この設定において、例えば、通常速度再生やスロー再生や早送り再生や逆再生などの伝導画像の再生速度設定、伝導画像の残像効果の有無、残像に関する輝度変化の有無などが設定される。
【0056】
そして、注目点追跡部40が、処理対象となる全ての注目点Pについて、処理対象となる全時相(全フレーム)に亘って、例えばパターンマッチング処理により移動点を追跡する(S904:図3,4参照)。次に、追跡結果に基づいて、距離変化計測部50が、各注目点Pごとに基準となる固定点を設定して各注目点Pごとに距離変化を計測する(S905:図5参照)。次に、特徴時相検出部60が、距離変化のデータを微分処理して得られる微分データに基づいて、各注目点Pについての特徴時相(特徴フレーム)を検出する(S906:図6,7参照)。
【0057】
こうして、処理対象となる全注目点Pについて特徴時相が検出されると、その検出結果に基づいて、伝導画像形成部70が伝導画像を形成する(S907:図8,10参照)。
【0058】
図10は、伝導画像形成部70における処理を纏めたフローチャートである。まず、残像効果の有無の設定、つまりS903(図9)における設定が確認され(S1001)、残像効果が無しに設定されていれば、S1002へ進み、処理対象となっている現在のフレーム(時相)が、処理対象となっている現在の注目点Pの特徴時相である場合にのみ、その注目点Pの画像位置にマーカが形成される(S1002:図8参照)。なお、マーカの輝度は固定値に設定される(S1003)。例えば表示可能な最高輝度にマーカの輝度が設定される。
【0059】
一方、S1001の確認において、残像効果が有りに設定されていれば、S1004へ進み、現在のフレーム(時相)が、現在の注目点Pの特徴時相または残像時相である場合に、その注目点Pの画像位置にマーカが形成される(S1004:図8参照)。例えば、次式の関係を満たす場合に、S1004においてマーカが形成される。次式における残像時相数は、例えば、ユーザにより設定されるか、又は、予め装置に設定された値が利用される。
【0060】
[数1]特徴時相≦現在の時相(現在のフレーム)<特徴時相+残像時相数
【0061】
次に、輝度変化の有無の設定、つまりS903(図9)における設定が確認され(S1005)、輝度変化が有りに設定されていれば、時相に応じてマーカの輝度が設定される(S1006)。例えば、次式によりマーカの輝度が設定される。
【0062】
[数2]マーカの輝度=表示可能な最高輝度−(現在の時相−特徴時相)×k
【0063】
なお、上式において、現在の時相と特徴時相との間の時相差に乗じられるkは、輝度調整のための係数であり、例えば、ユーザにより設定されるか、又は、予め装置に設定された値が利用される。また、上式により算出されるマーカの輝度が、表示可能な最低輝度よりも小さくなる場合には、マーカ(マーカの残像)は形成されない。
【0064】
一方、S1005の確認において、輝度変化が無しに設定されていれば、マーカの輝度は固定値に設定される(S1007)。つまり、特徴時相と全ての残像時相においてマーカの輝度が固定値とされる。例えば、表示可能な最高輝度にマーカの輝度が設定される。
【0065】
そして、処理対象となっている現在のフレーム(時相)において、処理対象となる全ての注目点に関する処理が終了したか否かが確認され(S1008)、終了していなければS1001に戻り、次の注目点についてS1001からS1007までの処理が実行される。
【0066】
S1001からS1007までの処理が繰り返し実行され、S1008において全ての注目点に関する処理の終了が確認されると、現在のフレームに対応した伝導画像が表示される(S1009)。なお、伝導画像は、S903(図9)において設定された再生速度に応じて表示される。
【0067】
さらに、処理対象となる全てのフレームに関する処理が終了したか否かが確認され(S1010)、終了していなければ、S1001に戻り、次のフレームについてS1001からS1009までの処理が実行される。こうして、S1001からS1009までの処理が繰り返し実行され、S1010において全てのフレームに関する処理の終了が確認されると、伝導画像形成部70における処理が終了する。
【0068】
以上、本発明の好適な実施形態である超音波診断装置について説明したが、例えば、図9と図10を利用して説明した処理の一部または全てに対応したプログラムにより、図1に示した注目点設定部30から伝導画像形成部70までの機能の一部または全てをコンピュータで実現し、そのコンピュータを超音波画像処理装置として機能させてもよい。
【0069】
なお、上述した実施形態は、あらゆる点で単なる例示にすぎず、本発明の範囲を限定するものではない。本発明は、その本質を逸脱しない範囲で各種の変形形態を包含する。
【符号の説明】
【0070】
10 プローブ、20 画像形成部、30 注目点設定部、40 注目点追跡部、50 距離変化計測部、60 特徴時相検出部、70 伝導画像形成部。
【特許請求の範囲】
【請求項1】
超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定部と、
運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成部と、
各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出部と、
運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成部と、
を有する、
ことを特徴とする超音波画像処理装置。
【請求項2】
請求項1に記載の超音波画像処理装置において、
前記変位情報生成部は、基準となる位置から各注目箇所までの距離を複数時相に亘って計測し、各注目箇所ごとにその距離の時間的変化を示した距離変化データを生成し、
前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データに基づいて、その注目箇所についての特徴時相を検出する、
ことを特徴とする超音波画像処理装置。
【請求項3】
請求項2に記載の超音波画像処理装置において、
前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データを微分処理して得られる微分データに基づいて、その注目箇所についての特徴時相を検出する、
ことを特徴とする超音波画像処理装置。
【請求項4】
請求項3に記載の超音波画像処理装置において、
前記特徴時相検出部は、各注目箇所についての特徴時相として、その注目箇所が運動を開始する時相、その注目箇所が運動を終了する時相、又は、その注目箇所が最も大きく運動する時相を検出する、
ことを特徴とする超音波画像処理装置。
【請求項5】
請求項1から4のいずれか1項に記載の超音波画像処理装置において、
前記画像形成部は、各注目箇所ごとに特徴時相においてその注目箇所の位置にマーカを形成する、
ことを特徴とする超音波画像処理装置。
【請求項6】
請求項5に記載の超音波画像処理装置において、
前記画像形成部は、各注目箇所ごとに特徴時相より後の時相においてその注目箇所の位置にマーカの残像を形成する、
ことを特徴とする超音波画像処理装置。
【請求項7】
超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定機能と、
運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成機能と、
各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出機能と、
運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成機能と、
をコンピュータに実現させる、
ことを特徴とするプログラム。
【請求項1】
超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定部と、
運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成部と、
各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出部と、
運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成部と、
を有する、
ことを特徴とする超音波画像処理装置。
【請求項2】
請求項1に記載の超音波画像処理装置において、
前記変位情報生成部は、基準となる位置から各注目箇所までの距離を複数時相に亘って計測し、各注目箇所ごとにその距離の時間的変化を示した距離変化データを生成し、
前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データに基づいて、その注目箇所についての特徴時相を検出する、
ことを特徴とする超音波画像処理装置。
【請求項3】
請求項2に記載の超音波画像処理装置において、
前記特徴時相検出部は、各注目箇所ごとに生成された距離変化データを微分処理して得られる微分データに基づいて、その注目箇所についての特徴時相を検出する、
ことを特徴とする超音波画像処理装置。
【請求項4】
請求項3に記載の超音波画像処理装置において、
前記特徴時相検出部は、各注目箇所についての特徴時相として、その注目箇所が運動を開始する時相、その注目箇所が運動を終了する時相、又は、その注目箇所が最も大きく運動する時相を検出する、
ことを特徴とする超音波画像処理装置。
【請求項5】
請求項1から4のいずれか1項に記載の超音波画像処理装置において、
前記画像形成部は、各注目箇所ごとに特徴時相においてその注目箇所の位置にマーカを形成する、
ことを特徴とする超音波画像処理装置。
【請求項6】
請求項5に記載の超音波画像処理装置において、
前記画像形成部は、各注目箇所ごとに特徴時相より後の時相においてその注目箇所の位置にマーカの残像を形成する、
ことを特徴とする超音波画像処理装置。
【請求項7】
超音波を送受することにより得られた画像内において、診断対象に対して複数の注目箇所を設定する注目箇所設定機能と、
運動する診断対象の画像内において、各注目箇所を複数時相に亘って追跡して各注目箇所ごとに変位情報を得る変位情報生成機能と、
各注目箇所ごとに得られた変位情報に基づいて、その注目箇所についての特徴時相を検出する特徴時相検出機能と、
運動する診断対象の画像内において、各注目箇所ごとに特徴時相においてその注目箇所を明示することにより、診断対象内で複数の注目箇所に亘って運動が伝導する様子を視覚的に示した伝導画像を形成する画像形成機能と、
をコンピュータに実現させる、
ことを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−42929(P2013−42929A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−182666(P2011−182666)
【出願日】平成23年8月24日(2011.8.24)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月24日(2011.8.24)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
[ Back to top ]