
超音波診断装置、及び超音波診断プログラム
【課題】 超音波プローブの位置情報とボリュームデータとの対応付けを簡便に行う。
【解決手段】 実施例によれば、超音波画像を生成する超音波画像生成手段と、プローブ位置情報を検出する位置情報検出手段と、プローブ位置情報に基づいて超音波プローブが静止していることを検出する静止検出手段と、ボリュームデータの所定の位置における参照画像を生成する参照画像生成手段と、静止の検出に基づいて超音波画像に対応する参照画像を第1の参照画像として抽出する抽出手段と、プローブ位置情報と、ボリュームデータにおいて第1の参照画像が生成された位置を示す第1参照画像位置情報とを関連付ける関連付け手段と、参照画像生成手段を用いて、関連付けされたプローブ位置情報に基づいて定まる、ボリュームデータ中の所定の位置における画像を第2の参照画像として生成して、第2の参照画像と超音波画像とを並べて表示する表示手段とを有する。
【解決手段】 実施例によれば、超音波画像を生成する超音波画像生成手段と、プローブ位置情報を検出する位置情報検出手段と、プローブ位置情報に基づいて超音波プローブが静止していることを検出する静止検出手段と、ボリュームデータの所定の位置における参照画像を生成する参照画像生成手段と、静止の検出に基づいて超音波画像に対応する参照画像を第1の参照画像として抽出する抽出手段と、プローブ位置情報と、ボリュームデータにおいて第1の参照画像が生成された位置を示す第1参照画像位置情報とを関連付ける関連付け手段と、参照画像生成手段を用いて、関連付けされたプローブ位置情報に基づいて定まる、ボリュームデータ中の所定の位置における画像を第2の参照画像として生成して、第2の参照画像と超音波画像とを並べて表示する表示手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、超音波画像を用いて診断を行う超音波診断装置、及び超音波診断プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに内蔵された超音波振動子から超音波を被検体に対して送信し、被検体内で生じた反射波(以下、単にエコー信号と記載する)を超音波振動子で受信して、エコー信号に基づく超音波画像を生成する装置である。
【0003】
近年、予めCT(Computed Tomography)装置を用いてCTボリュームデータを取得した上で、CTボリュームデータから生成したCT断層像と、リアルタイムで生成している超音波画像とを並べて表示することが可能な超音波診断装置の開発が進んでいる。超音波画像とCT断層像の表示部位とを一致させて被検体中の同じ領域を観察するために、超音波プローブに位置センサを取り付け、超音波プローブの位置情報に合わせてCT断層像を生成する断面の位置を更新することが可能な超音波診断装置が実用化されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−34262号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
先述したような超音波診断装置を用いて超音波画像とCT断層像の表示部位を一致させるためには、位置センサが取得する超音波プローブの位置情報に関する座標系と、CTボリュームデータに関する座標系とを対応付けておく必要がある。従来の超音波診断装置においては、例えば被検体の体表より触知可能な剣状突起をランドマークとして座標系の対応付けを行っていた。すなわち、操作者はまず、CTボリュームデータ中に含まれる剣状突起を目視により検出して剣状突起のCTボリュームデータ座標系における位置情報を登録する。その後、操作者は被検体の体表から触知した剣状突起に超音波プローブを接触させて、この時の位置センサの座標系における超音波プローブの位置情報を登録する。超音波診断装置は登録された2つの位置情報を比較することによって、CTボリュームデータ座標系を位置センサ座標系に変換する処理を行う。
【0006】
ところが、これらの処理においてCTボリュームデータ中の剣状突起の検出や、被検体上の剣状突起の触知などは操作者の主観によって行われる。そのため、未熟な操作者によっては超音波プローブにおける位置情報の座標系とCTボリュームデータの座標系との対応付けが正しく行えず、臨床上有用な診断が行えない可能性がある。
【0007】
そこで本願においては、超音波プローブの位置情報とボリュームデータとの対応付けを簡便に行うことを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため実施形態の超音波診断装置においては、スキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号を得る超音波プローブと、前記エコー信号に基づいて超音波画像を生成する超音波画像生成手段と、前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出手段と、前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する静止検出手段と、ボリュームデータの所定の位置における参照画像を生成する参照画像生成手段と、前記静止の検出に基づいて、前記超音波画像に対応する参照画像を第1の参照画像として抽出する抽出手段と、前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す第1参照画像位置情報とを関連付ける関連付け手段と、前記参照画像生成手段を用いて、前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成して、前記第2の参照画像と前記超音波画像とを並べて表示する表示手段とを有する。
【0009】
また、上記課題を解決するため実施形態の超音波診断プログラムは、コンピュータに、エコー信号に基づいて超音波画像を生成する機能と、前記エコー信号を取得した超音波プローブの位置を示すプローブ位置情報を検出する機能と、前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する機能と、ボリュームデータの所定の位置における参照画像を生成する機能と、前記静止の検出に基づいて前記超音波画像に対応する参照画像を第1の参照画像として抽出する機能と、前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す参照画像位置情報とを関連付ける機能と、前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成する機能と、前記第2の参照画像と前記超音波画像とを並べて表示する機能とを実現させる。
【図面の簡単な説明】
【0010】
【図1】実施例に係る超音波診断装置の内部構成を示すブロック図。
【図2】実施例に係る超音波画像及び参照画像を撮影する様子を示す図。
【図3】実施例に係る超音波画像と参照画像とを並べて表示する様子を示す図。
【図4】実施例に係る超音波プローブ位置情報対応付けの処理を示すフローチャート。
【図5】実施例に係る超音波プローブ位置情報対応付けの別の処理を示すフローチャート。
【図6】実施例に係る参照画像の探索範囲を示す図。
【発明を実施するための形態】
【0011】
(超音波診断装置1の構成)
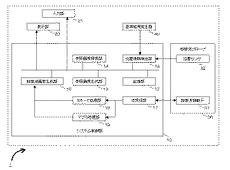
以下、本開示の実施例について図面を参照して説明する。図1は、各実施例に係る超音波診断装置1の構成を示したブロック図である。超音波診断装置1は、システム制御部10、入力部21、表示部23、超音波プローブ30、及び基準磁場発生器40とを組み合わせることにより構成される。なお、本発明における超音波診断装置1の構成はこれに限られるものではなく、適宣構成要素を追加しても構わないし、超音波診断装置1の構成要素の幾つかを省略して、超音波診断装置1の外部に接続した装置が省略された構成要素の役割を果たすものであっても構わない。例えば後述する参照画像生成部13を超音波診断装置1の外部に接続した画像処理装置に行わせる構成としても構わない。また例えば超音波プローブ30や送受信部17、Bモード処理部18、ドプラ処理部19といった超音波画像の生成に用いる構成要素を超音波診断装置1の外部に接続した超音波画像取得装置に行わせる構成としても構わない。あるいは本実施例に述べる位置情報の対応付け機能を実行するためのプログラムを任意のコンピュータにインストールして実行することで、コンピュータを実質的に超音波診断装置1として動作させるものであっても構わない。
【0012】
超音波プローブ30はシステム制御部10に接続される部材である。超音波プローブ30は超音波振動子31を内蔵し、送受信部17から出力された駆動信号に基づいて超音波振動子31を駆動する。また、超音波プローブ30に位置センサ32が接続でき、位置センサ32は後述する基準磁場発生器40から出力される基準磁場を用いて超音波プローブ30の位置情報を検出して位置情報検出部16へと出力する。
【0013】
超音波振動子31は、送受信部17を介して入力された駆動信号に基づいて超音波を発生し、また被検体から反射された超音波を受信して電気信号へ変換する部材である。超音波振動子31は超音波を受信することにより生じた電気信号(以下、単にエコー信号と記載する)を送受信部17へと出力する。また、本実施例における超音波振動子31は、リニア形、コンベックス形、セクタ形などの2次元平面をスキャンする種々の形状によって構成されていても構わないし、あるいはメカ4Dプローブ(機械式3次元プローブ)あるいは2Dアレイプローブ(マトリクスアレイプローブ)などの3次元空間をスキャンする種々の形状により構成されるものであっても構わない。
【0014】
位置センサ32は位置情報を検出するセンサである。位置センサ32は例えば複数のコイルを3つのそれぞれ直交する平面上に配置し、各コイルに電流を検出する電流計を接続することにより構成される。コイルは後述する基準磁場発生器40から発生する基準磁場が入力されると電磁誘導により電流を発し、電流計がこの電流を検出する。位置センサ32は3つの平面に対応するコイルから出力された電流の大きさを位置情報検出部16へと出力する。後述する位置情報検出部16はこの電流の大きさを比較することにより、基準磁場発生器40から発生した基準磁場中心に対する位置センサ32の相対的な位置を算出する。また、位置センサ32は異なる位置にあるコイルから出力された電流の大きさを比較し、それぞれの基準磁場中心からの相対的な位置を算出する。更に位置情報検出部16は異なる位置にあるコイルの位置を比較することにより、超音波プローブ30が基準磁場中心に対してどれだけ傾いているかを算出する。以降の実施例では、位置センサ32が検出した基準磁場中心に対する相対的な位置と、超音波プローブ30の傾きとを総称して、単に超音波プローブ30の位置情報と記載する。なお、本実施例においては位置センサ32の構成例としてコイルを用いて磁場を検出するものを挙げたが、位置センサ32の構成はこれに限られるものではない。例えばコイル以外にホール素子などの他の磁気検出素子を用いて位置センサ32を構成しても構わない。あるいは磁気を用いて位置情報を算出する替わりに、位置センサ32を加速度センサやジャイロセンサなどを組み合わせて構成し、位置情報検出部16がこれらのセンサの出力信号を用いて位置情報を検出するようにしても構わない。
【0015】
基準磁場発生器40は基準磁場を発生する装置である。基準磁場発生器40は例えばコイルをそれぞれ直交する平面上に配置し、各コイルに電流を供給する電流源を接続することにより構成される。コイルは接続された電流源から電流が入力されると、その中心から基準磁場を発生させる。基準磁場発生器40は例えば10msごとなどの等間隔で、電流を供給するコイルを切り替えながら基準磁場を発生させる。これにより、基準磁場発生器40が発生する基準磁場の方向が等間隔で切り替わることとなる。基準磁場発生器40は基準磁場を発生させるとともに、現在どの方向に向いた基準磁場を発生させているかを示す情報を位置情報検出部16へと出力する。なお、基準磁場発生器40の構成はこれに限られるものではなく、基準磁場の方向を切り替える時間間隔は任意の時間間隔であっても構わないし、あるいは任意の時間間隔で基準磁場の発生と遮断とを切り替える構成としても構わない。
【0016】
システム制御部10は、記憶部12、参照画像生成部13、参照画像探索部15、超音波画像生成部15、位置情報検出部16、送受信部17、Bモード処理部18、ドプラ処理部19から構成される。システム制御部10は各構成要素へ制御命令を出力し、超音波診断装置1を統括的に制御する。
【0017】
送受信部17は、超音波プローブ30が受信したエコー信号を処理するアンプ回路、A/D変換器、加算器などを備える。アンプ回路は、超音波プローブ30が受信したエコー信号を増幅し、A/D変換器へ出力する。A/D変換器は、増幅されたエコー信号の受信指向性を決定するために必要な遅延時間をエコー信号に与え、加算器へと出力する。加算器は遅延時間を与えられたエコー信号を加算することで、超音波を送信するスキャンラインに対応したエコー信号を得る。送受信部21はスキャンラインに対応したエコー信号をBモード処理部18あるいはドプラ処理部19へと出力する。また送受信部17は、超音波振動子31を駆動し超音波を送信するための駆動信号を超音波超音波プローブ30へと出力する。
【0018】
Bモード処理部18は、送受信部17が出力したエコー信号の振幅強度に応じて変化するBモード信号を生成する。Bモード処理部18は生成したBモード信号を超音波画像生成部15へ出力する。
【0019】
ドプラ処理部19は、エコー信号の周波数遷移を検出して、組織あるいは血流の移動速度を抽出したドプラ信号を生成する。ドプラ処理部19はドプラ信号を超音波画像生成部15へ出力する。
【0020】
超音波画像生成部15は、Bモード処理部18あるいはドプラ処理部19から出力されたBモード信号やドプラ信号に基づいて、超音波画像を生成する。この超音波画像の生成は、例えばBモード信号から算出された画素値を超音波の送受信方向に対応した2次元平面にマッピングすることにより行われる。超音波画像生成部15が生成する超音波画像はこれに限られるものではなく、例えばドプラ信号から算出された速度値を色情報に変換した画素を2次元平面にマッピングしても構わない。あるいは、超音波プローブ30が3次元空間のスキャンを行った場合には、超音波画像生成部15はBモード信号やドプラ信号から定まる画素値を3次元空間にマッピングしたボリュームデータを生成する。そして、超音波画像生成部15はボリュームデータを任意の視点から投影した投影画像や、あるいはボリュームデータの任意の断面における画素値を2次元平面にマッピングした断層画像を生成する。以下、超音波画像生成部15が生成した超音波画像を単にライブ像と記載する。
【0021】
位置情報検出部16は、位置センサ32が出力した信号に基づいて超音波プローブ30の位置情報を算出する。先述したように、位置情報検出部16が算出する位置情報は、基準磁場発生器40が発生する基準磁場中心からの相対的な位置を示す情報と、超音波プローブ30の基準磁場中心からの傾き方向、傾き角度を示す情報とから構成される。
【0022】
記憶部12は、例えばROM(Read Only Memory)、RAM(Random Access Memory)やフラッシュメモリ、及びHDD(Hard Disk Drive)などから構成される記憶媒体である。記憶部12は超音波画像生成部15が生成した超音波画像や、CT装置やMRI(Magnetic Resonance Imaging)装置、核医学診断装置、あるいは超音波診断装置などで予め取得したボリュームデータが記憶される(以下、スキャンの前に予め記憶部12に記憶されているボリュームデータを参照ボリュームデータと記載する)。また、参照ボリュームデータに関連付けられた位置情報が記憶される。この他にも、記憶部12は、参照ボリュームデータを用いて参照画像生成部13が生成した参照画像や、超音波画像生成部15が生成したライブ像などの種々の画像情報や、後述する位置情報の対応付け機能を実行するためのプログラムを記憶する。なお、後述する実施例において各画像情報は記憶部12に格納されたものに限定されず、例えば超音波診断装置1にネットワーク接続されたサーバや外部記憶装置などに格納された画像情報を用いて各処理を行うものであっても構わない。
【0023】
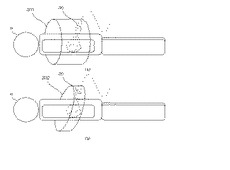
参照画像生成部13は、記憶部12に記憶された参照ボリュームデータを用いて参照画像を生成する処理部である。この参照画像は、表示部23がライブ像と並べて表示するために用いる第1の用途と、参照画像探索部14がライブ像の位置情報を検出するマッチング処理を行うために用いる第2の用途との2つの用途に用いられる。参照画像生成部13は第1の用途における参照画像を生成するときには、位置情報検出部16から出力された位置情報に基づいて、ライブ画像が撮影された被検体上の部位に対応する部位を示す参照画像の生成を行う。この参照画像の生成は具体的には、まず位置情報検出部16が出力した位置情報に基づいて断層像を生成する断面の位置を設定し、参照ボリュームデータにおいて設定した断面上にあるボクセルのボクセル値を抽出する。そして参照画像生成部13は、抽出したボクセル値を2次元平面にマッピングして断層像を生成する。図2は、超音波画像生成部15が生成するライブ像100と、参照画像生成部13が生成する参照画像102との位置関係を示す図である。図2(a)はライブ像100の生成位置を、図2(b)は参照ボリュームデータ101及び参照画像生成部102が生成する参照画像102の位置をそれぞれ示している。図2(a)に示すように、超音波画像生成部15は超音波プローブ30の先端に対応する位置を撮影部位としてライブ像100を生成する。このライブ像100の撮影部位は超音波振動子31が送信する超音波の方向によって定まるため、位置情報検出部16から出力された超音波プローブ30の位置及び傾きを含む位置情報を用いることにより、撮影部位がどの位置にあるかを推定することができる。参照画像生成部13は、位置情報を用いて推定したライブ像100の撮影部位と同じ位置に断面を設定して、参照画像102として断層像の生成を行う。即ち図2に示すように、参照画像生成部13は、ライブ像100と参照画像102とが被検体P上で同じ撮影部位を捉えるように参照画像102の撮像部位を設定する。参照画像生成部13は参照画像を生成すると、これを表示部23あるいは記憶部12へと出力する。
【0024】
一方参照画像生成部13は第2の用途に用いる参照画像を生成するときには、後述する処理に基づいて、参照ボリュームデータ中に断層像を生成する領域として探索範囲を設定する。そして、参照画像生成部13は、この探索範囲内において様々な位置・傾きにおける複数の断層像を生成する。この断層像の生成において参照画像生成部13は、参照ボリュームデータからボクセル値を抽出し、ボクセル値を2次元平面にマッピングする処理については第1の用途の場合と同じ処理を行う。参照画像生成部13は参照画像を生成すると、これを参照画像探索部14あるいは記憶部12へと出力する。
【0025】
参照画像探索部14は、参照画像生成部13が第2の用途として生成した複数の参照画像と、超音波画像生成部15が生成したライブ像とを用いて、位置合わせ処理を行う処理部である。この位置合わせ処理とは具体的には、ライブ像の撮影位置と参照画像の撮影位置とが実質的に一致する参照画像を探索することによって、超音波プローブ30の位置情報を検出する座標系と、参照ボリュームデータの座標系とを一対一に対応させる処理である。以下、位置合わせ処理の流れについて述べる。参照画像探索部14は位置合わせ処理を開始すると、ライブ像と参照画像生成部13が出力した複数の参照画像との比較を行って、ライブ像と最も相関の高い参照画像を複数の参照画像の内から検出する。この参照画像の検出処理は、例えばライブ画像と複数の参照画像から、それぞれエッジ形状を検出して、ライブ画像のエッジ形状と最も類似するエッジ形状を有する参照画像を抽出することにより行われる。ここでエッジとは、画像中で画素値が急激に変化する領域として検出される領域のことを指す。図3に、ライブ像と参照画像探索部14が抽出した参照画像とを示す。図3(a)はライブ像を、図3(b)は抽出された参照画像をそれぞれ示している。図3に示すように、参照画像探索部14が抽出した参照画像の撮影位置は、ライブ像の撮影位置と実質的に同じものとなる。参照画像探索部14はライブ像と撮影位置が実質的に一致する参照画像を抽出すると、ライブ像の位置情報、即ち超音波プローブ30の位置及び傾きの情報と、抽出した参照画像の断面の位置及び傾きの情報とを対応させて、参照ボリュームデータの座標系を超音波プローブ30の位置情報の座標系に変換する処理を行い、位置合わせ処理を完了する。以上の位置合わせ処理によって、超音波プローブ30の位置情報が定まれば、超音波プローブ30の撮影位置と実質的に同じ撮影位置における、参照ボリュームデータ上の断層像の位置が定まることになる。参照画像探索部14は位置合わせ処理を行い座標系の変換を行うと、変換された座標系の情報を参照画像生成部13へと出力する。参照画像生成部13は第1の用途における参照画像を生成する際に、この変換された座標系の情報を使用して超音波プローブ30の位置情報に基づいて参照画像を生成する断層像の位置を決定する。
【0026】
なお、本実施例における位置合わせ処理は、ここに述べたものに限定されない。例えばライブ像を用いて参照画像を抽出する処理は、エッジによるものでなくても構わない。例えばライブ像から画素変化のベクトル情報や特徴点の情報などを検出し、このベクトル情報や特徴点と最も類似するベクトル情報や特徴点を有する参照画像を探すことにより参照画像の抽出を行っても構わない。あるいは単にライブ像と参照画像との間で画素値の差分を求め、この差分が最も小さくなる参照画像を最も相関の高い参照画像として抽出しても構わない。また、参照画像探索部14はライブ像の全体と相関の高い参照画像を探索するものでなくてもよい。例えばライブ像の下半分や、ライブ像のうち入力部21を介して操作者に指定された画像領域など、ライブ像の一部分と相関の高い参照画像を探索するものであっても構わない。また、座標系の変換処理において、参照ボリュームデータにおける座標系を超音波プローブ30の位置情報における座標系に変換する代わりに、超音波プローブ30の位置情報における座標系を参照ボリュームデータにおける座標系に変換しても構わない。
【0027】
入力部21は、例えば機械的なボタン、ダイヤル、トラックボール、ジョイスティック、スライダやホイールなどの種々の操作デバイスを用いて構成され、オペレータの入力操作を受け付けて、入力操作を電気信号に変換してシステム制御部10へ出力する部材である。入力部21は受け付けた入力操作に応じて、例えば送受信部17にスキャンの開始・停止を指示する指示信号や、参照画像とライブ像とを並べて表示部23に表示させる指示信号をシステム制御部10へ出力する。
【0028】
表示部23は、例えばLCD(Lucid Crystal Display)ディスプレイや有機EL(Electro luminescence)ディスプレイ、あるいはブラウン管ディスプレイなどの任意のディスプレイにより構成される。表示部23は、参照画像やライブ像を表示する。あるいは、送受信部17がスキャンを行う際のスキャンパラメータや、超音波画像生成部15がライブ像を生成する際の画像化パラメータ、参照画像生成部13が参照ボリュームデータから参照画像を生成する際の画像化パラメータ、種々のメッセージなどを表示する。
【0029】
(位置合わせ処理の流れ)
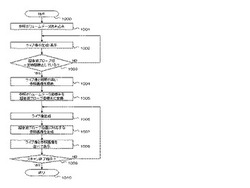
先に述べた各構成要素に基づいて、超音波診断装置1はライブ像と参照画像を用いた位置合わせ処理および、ライブ像と参照画像の生成及び表示を行う。図4は、超音波診断装置1が位置合わせ処理を行った上で、ライブ像と参照画像とを並べて表示する表示処理を行う際の、一連の処理の流れを示したフローチャートである。以下、図4に沿って処理の流れについて述べる。なお、図4の処理を行うにあたって、記憶部12には参照ボリュームデータが予め記憶されているものとする。
【0030】
まず、超音波診断装置1の使用者が処理を開始する(ステップ1000)と、システム制御部10は記憶部12から参照ボリュームデータを読み出す(ステップ1001)。続いて、システム制御部10は超音波プローブ30によりスキャンを行って、被検体Pのエコー信号を収集して、超音波画像生成部15がエコー信号に基づいてライブ像を生成して表示部23に表示する(ステップ1002)。なお、表示部23はライブ像の他に、超音波プローブ30の操作の目安となるように、参照ボリュームデータ中の所定位置の断面における参照画像(例えば、剣状突起を含む参照画像)を並べて表示しても構わない。次に、位置情報検出部16は超音波プローブ30の位置情報を検出して、超音波プローブ30が一定時間以上静止しているか否かを判断する(ステップ1003)。この一定時間は入力部21の入力操作によって任意の値が指定され、例えば1秒間などの値が用いられる。また、静止しているか否かの判断は、例えば位置情報の変動が予め定められた閾値の範囲内に収まっているか否かを判断することにより行われる。従って、本実施例でいう静止は超音波プローブ30が完全に静止している場合のみならず、所定の範囲内で僅かに動いている場合を含むものであって構わない。位置情報検出部16が超音波プローブ30は静止していないと判断すると(ステップ1003のNo)、システム制御部10はステップ1002に戻ってライブ像の生成及び表示を続ける。
【0031】
一方位置情報検出部16が超音波プローブ30は一定時間以上静止していると判断すると(ステップ1003のYes)、参照画像探索部14は、ライブ像と相関の高い参照画像を探索する(ステップ1004)。このとき、参照画像探索部14は探索に用いるライブ像として、超音波プローブ30が静止していた時間領域のうち、中間の時間領域において撮影されたライブ像を用いる。例えば一定時間が1秒間として設定されており、位置情報検出部16が超音波プローブ30の静止状態が1秒間維持されたことを検出した場合には、参照画像探索部14は超音波プローブ30が静止しはじめてから0.5秒が経過した時点におけるライブ像を用いて探索を行う。これにより、参照画像探索部14は超音波プローブ30の静止が確からしい時間帯に撮影されたライブ像を用いて探索を行うことができる。なお、探索に用いるライブ像はこれに限られるものではなく、例えば一定時間が経過した時点で撮影されたライブ像を用いて探索を行っても構わないし、入力部11が別途参照画像を探索する指示信号を入力するものであって、この指示信号をシステム制御部10が受け付けた時点におけるライブ像を用いて探索を行っても構わないし、あるいは記憶部12から複数のライブ像を読み出して表示し、探索に用いるライブ像を入力部11が選択するものであっても構わない。また、表示部23はステップ1004の処理を行う際に、探索に用いるライブ像をフリーズ表示するものであっても構わない。なお、ステップ1004の処理において、参照画像探索部14は参照ボリュームデータの全ての領域を探索領域として、ライブ像と撮影位置の一致する参照画像の探索を行う。
【0032】
ステップ1004において参照画像探索部14がライブ像と撮影位置の一致する参照画像を抽出すると、参照画像探索部14はライブ像を撮影した時点における超音波プローブ30の位置情報と、抽出した参照画像の参照ボリュームデータにおける位置情報とを用いて、参照ボリュームデータにおける座標系を超音波プローブ30の位置情報における座標系に変換する(ステップ1005)。この変換された座標系において、ライブ像の撮影位置と参照画像の撮影位置は同一となるように、参照画像探索部14は座標系の変換を行う。参照画像探索部14は変換した参照ボリュームデータにおける座標系の情報を参照画像生成部13へと出力する。
【0033】
ステップ1005において座標系の変換処理が終了すると、システム制御部10は再び超音波プローブ30によりスキャンを行って、被検体Pのエコー信号を収集して、超音波画像生成部15がエコー信号に基づいてライブ像を生成する(ステップ1006)。次に参照画像生成部13は、ステップ1006においてライブ像を生成した時点における超音波プローブ30の位置情報に対応する位置の参照画像を生成する(ステップ1007)。即ち、ステップ1007において生成される参照画像の撮影位置は、ライブ像の撮影位置と実質的に同じものとなる。参照画像生成部13が参照画像を生成すると、表示部23はライブ像と参照画像とを並べて表示する(ステップ1008)。次に、システム制御部10は、入力部21を介してスキャンを終了する指示があったか否かを判断する(ステップ1009)。スキャンを終了する指示がなかった場合には(ステップ1009のNo)、システム制御部10はステップ1006に戻ってライブ像及び参照画像の生成を続ける。ステップ1006からステップ1009までの処理を繰り返して行うことにより、超音波プローブ30の位置の変化に追随してライブ像と、参照画像が変化することとなる。一方スキャンを終了する指示があった場合には(ステップ1009のYes)、システム制御部10は処理を終了する(ステップ1010)。
【0034】
以上の処理により、超音波診断装置1は位置合わせ処理及びライブ像と参照画像の表示処理を行う。超音波プローブ30の静止を契機に位置合わせ処理を行うことにより、操作者は位置合わせ処理を開始するための入力操作を省くことができ、操作者の操作負担を軽減することができる。
【0035】
また、超音波診断装置1はライブ像と相関の高い参照画像を探索して位置合わせ処理を行う。ライブ像と相関の高い参照画像を自動的に探索することにより、位置合わせ処理を超音波プローブ30の操作の巧拙に関らず高精度で行うことができる。
【0036】
また、超音波診断装置1は位置合わせ処理が行われた後は、ライブ像と撮影位置の一致する参照画像を生成してライブ像と並べて表示する。これにより、操作者は参照画像とライブ像とを見比べながら診断を行うことができる。
【0037】
(位置ずれの補正処理)
図4を用いて説明した処理によって、超音波診断装置1は同じ撮影位置にあるライブ像と参照画像とを並べて表示する。しかし、例えば位置センサ32が出力する位置情報の誤差などが原因で、超音波プローブ30の位置が位置センサ32の位置情報に正しく反映されていない場合が考えられる。この場合には、例えば超音波プローブ30が移動するにつれてライブ像の撮影位置と参照ボリュームデータ上の参照画像の撮影位置との誤差(以下、この誤差を単に位置ずれと記載する)が蓄積し、ライブ像の撮影位置と参照画像の撮影位置とがずれてしまうために、操作者は正しい診断を行うことができない。そこで、超音波診断装置1は位置センサ32の位置情報の誤差を補償するために、図4を用いて説明した処理に加えて位置ずれを補正する処理を行っても構わない。図5は、図4の処理に加えて位置ずれの補正処理を行う場合の、超音波診断装置1の一連の処理の流れを示したフローチャートである。以下、図5に沿って処理の流れについて述べる。
【0038】
なお、図5のステップ2000からステップ2003までの処理と、ステップ2007からステップ2010までの処理については、図4のステップ1000からステップ1003までの処理と、ステップ1006からステップ1009までの処理と同様であるため、説明を省略する。
【0039】
ステップ2003において位置情報検出部16が、超音波プローブ30が一定時間静止していたことを検出すると(ステップ2003のYes)、参照画像探索部14は、位置合わせ処理を行う際の参照画像の探索範囲を参照ボリュームデータの全体として設定する(ステップ2004)。参照画像探索部14は探索範囲を設定すると、ライブ像と相関の高い参照画像を探索範囲内の参照ボリュームデータから探索する(ステップ2005)。この時点においては、参照ボリュームデータの全体が探索範囲として設定されているため、参照画像探索部14は例えば参照ボリュームデータの全ての位置・傾きについて参照画像の生成を行い、ライブ画像との比較を行うこととなる。ステップ2005で参照画像探索部14がライブ像と相関の高い参照画像を抽出すると、参照画像探索部14はライブ像を撮影した時点における超音波プローブ30の位置情報と、抽出した参照画像の参照ボリュームデータにおける位置情報とを用いて、参照ボリュームデータにおける座標系を超音波プローブ30の位置情報における座標系に変換する(ステップ2006)。この変換された座標系において、ライブ像の撮影位置と参照画像の撮影位置は同一となるように、参照画像探索部14は座標系の変換を行う。ステップ2007からステップ2009までの処理によって表示部23に撮影位置が同じライブ像と参照画像とが表示されると、システム制御部10は、入力部21を介してスキャンを終了する指示があったか否かを判断する(ステップ2010)。スキャンを終了する指示がなかった場合には(ステップ2010のNo)、参照画像探索部14は例えばステップ2007において生成されたライブ像の撮影位置の近傍を探索範囲として設定する(ステップ2011)。ここで言う近傍とは、ライブ像の撮影位置に対して傾きと位置が所定の範囲内にある領域のことを指す。図6にステップ2004とステップ2011で設定された探索範囲の違いを示す。図6(a)にステップ2004で設定された探索範囲201を、図6(b)にステップ2011で設定された探索範囲202をそれぞれ示している。図6(a)に示すようにステップ2004においては、参照画像探索部14が設定する探索範囲201は、参照ボリュームデータの領域と同一となる。一方図6(b)に示すようにステップ2011においては、参照画像探索部14は超音波プローブ30を用いて撮影したライブ像の撮影位置の近傍のみを探索範囲として設定する。従って、ステップ2004において設定された探索範囲に比べて、ステップ2011において設定された探索範囲は狭いものとなる。ステップ2011において参照画像探索部14が探索範囲を設定すると、参照画像探索部14はライブ像の相関の高い参照画像を探索範囲内の参照ボリュームデータから探索する(ステップ2005)。この時点においては、参照ボリュームデータのうちライブ像撮影位置の近傍のみが探索範囲として設定されているため、参照ボリュームデータの全体が探索範囲である場合に比べて少ない数の参照画像が生成され、ライブ画像と比較される。生成及び比較される参照画像の数が少なくなることにより、参照ボリュームデータの全体が探索範囲である場合に比較して、参照画像の抽出が高速に行われる。ステップ2005で参照画像探索部14がライブ像と相関の高い参照画像を抽出すると、システム制御部10はステップ2006での座標系の変換処理を行う。
【0040】
一方ステップ2010でスキャンを終了する指示があった場合には(ステップ2010のYes)、システム制御部10は処理を終了する(ステップ2012)。
【0041】
以上の処理により、超音波診断装置1はライブ像と参照画像とを並べて表示する処理を行うと共に、並べて表示したライブ像を使って参照画像を探索し、抽出された参照画像を用いて座標系の変換を行う。この処理によって座標系の変換処理が随時行われるために、もし位置センサ32が出力する位置情報に誤差があった場合であっても、常に正しく対応付けられた座標系を用いてライブ像と同じ撮影位置における参照画像を抽出し表示することができる。
【0042】
また、超音波診断装置1は参照ボリュームデータのうちライブ像撮影位置の近傍にあるデータのみを使って参照画像の探索処理を行う。これにより、参照画像の探索処理を高速に行うことができ、ライブ像と参照画像の表示処理に併せてリアルタイムで座標系の変換処理を行うことができる。
【0043】
なお、本実施例における超音波診断装置1の構成はこれに限定されず、適宣構成や動作を省略し、あるいは追加しても構わない。例えば図4のステップ1004や図5のステップ1005において、ライブ像内にアーチファクトが写りこんでいることや、あるいは参照ボリュームデータから参照画像を生成する際の画像化パラメータ(例えば、ボクセル値から2次元平面にマッピングする画素値を算出する際に用いる係数、即ちレンダリングレンジ)が適切に設定されていないことなどが原因となって、参照画像探索部14がライブ像と相関の高い参照画像を参照ボリュームデータ中から探索できない事態が発生しうる。システム制御部10は参照画像探索部14が相関の高い参照画像を探索できなかった場合には、例えば表示部23に探索が行えなかった旨を示すメッセージを表示してもよい。また、システム制御部10は探索が行えなかった旨を示すメッセージを表示するとともに、参照画像を生成する際の画像化パラメータを変更する操作を促すメッセージを表示しても良い。また、システム制御部10は探索が行えなかった旨を示すメッセージを表示すると共に、入力部21を介した操作によって座標系の変換処理を行う操作を促すメッセージを表示してもよい。
【0044】
また、本実施例においては超音波画像生成部15が2次元のライブ像を生成し、参照画像探索部14が2次元のライブ像と相関の高い2次元の参照画像を探索するものとして説明したが、ライブ像及び参照画像は2次元のものに限られない。例えば超音波画像生成部15が3次元のボリュームデータをライブ像として生成し、参照画像探索部14が3次元のライブ像と相関の高い3次元のボリュームデータを参照画像として探索するものであっても構わない。あるいは超音波画像生成部15が動画像のライブ像を生成し、参照画像14が動画像のライブ像のうちいずれかの1フレームと相関の高い2次元の参照画像を探索するものであっても構わない。
【0045】
以上に本発明のいくつかの実施例を説明したが、これらの実施例は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施例は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施例やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0046】
P 被検体
1 超音波診断装置
10 システム制御部
12 記憶部
13 参照画像生成部
14 参照画像探索部
15 超音波画像生成部
16 位置情報検出部
17 送受信部
18 Bモード処理部
19 ドプラ処理部
21 入力部
23 表示部
30 超音波プローブ
31 超音波振動子
32 位置センサ
40 基準磁場発生器
【技術分野】
【0001】
本開示は、超音波画像を用いて診断を行う超音波診断装置、及び超音波診断プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに内蔵された超音波振動子から超音波を被検体に対して送信し、被検体内で生じた反射波(以下、単にエコー信号と記載する)を超音波振動子で受信して、エコー信号に基づく超音波画像を生成する装置である。
【0003】
近年、予めCT(Computed Tomography)装置を用いてCTボリュームデータを取得した上で、CTボリュームデータから生成したCT断層像と、リアルタイムで生成している超音波画像とを並べて表示することが可能な超音波診断装置の開発が進んでいる。超音波画像とCT断層像の表示部位とを一致させて被検体中の同じ領域を観察するために、超音波プローブに位置センサを取り付け、超音波プローブの位置情報に合わせてCT断層像を生成する断面の位置を更新することが可能な超音波診断装置が実用化されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−34262号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
先述したような超音波診断装置を用いて超音波画像とCT断層像の表示部位を一致させるためには、位置センサが取得する超音波プローブの位置情報に関する座標系と、CTボリュームデータに関する座標系とを対応付けておく必要がある。従来の超音波診断装置においては、例えば被検体の体表より触知可能な剣状突起をランドマークとして座標系の対応付けを行っていた。すなわち、操作者はまず、CTボリュームデータ中に含まれる剣状突起を目視により検出して剣状突起のCTボリュームデータ座標系における位置情報を登録する。その後、操作者は被検体の体表から触知した剣状突起に超音波プローブを接触させて、この時の位置センサの座標系における超音波プローブの位置情報を登録する。超音波診断装置は登録された2つの位置情報を比較することによって、CTボリュームデータ座標系を位置センサ座標系に変換する処理を行う。
【0006】
ところが、これらの処理においてCTボリュームデータ中の剣状突起の検出や、被検体上の剣状突起の触知などは操作者の主観によって行われる。そのため、未熟な操作者によっては超音波プローブにおける位置情報の座標系とCTボリュームデータの座標系との対応付けが正しく行えず、臨床上有用な診断が行えない可能性がある。
【0007】
そこで本願においては、超音波プローブの位置情報とボリュームデータとの対応付けを簡便に行うことを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため実施形態の超音波診断装置においては、スキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号を得る超音波プローブと、前記エコー信号に基づいて超音波画像を生成する超音波画像生成手段と、前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出手段と、前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する静止検出手段と、ボリュームデータの所定の位置における参照画像を生成する参照画像生成手段と、前記静止の検出に基づいて、前記超音波画像に対応する参照画像を第1の参照画像として抽出する抽出手段と、前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す第1参照画像位置情報とを関連付ける関連付け手段と、前記参照画像生成手段を用いて、前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成して、前記第2の参照画像と前記超音波画像とを並べて表示する表示手段とを有する。
【0009】
また、上記課題を解決するため実施形態の超音波診断プログラムは、コンピュータに、エコー信号に基づいて超音波画像を生成する機能と、前記エコー信号を取得した超音波プローブの位置を示すプローブ位置情報を検出する機能と、前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する機能と、ボリュームデータの所定の位置における参照画像を生成する機能と、前記静止の検出に基づいて前記超音波画像に対応する参照画像を第1の参照画像として抽出する機能と、前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す参照画像位置情報とを関連付ける機能と、前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成する機能と、前記第2の参照画像と前記超音波画像とを並べて表示する機能とを実現させる。
【図面の簡単な説明】
【0010】
【図1】実施例に係る超音波診断装置の内部構成を示すブロック図。
【図2】実施例に係る超音波画像及び参照画像を撮影する様子を示す図。
【図3】実施例に係る超音波画像と参照画像とを並べて表示する様子を示す図。
【図4】実施例に係る超音波プローブ位置情報対応付けの処理を示すフローチャート。
【図5】実施例に係る超音波プローブ位置情報対応付けの別の処理を示すフローチャート。
【図6】実施例に係る参照画像の探索範囲を示す図。
【発明を実施するための形態】
【0011】
(超音波診断装置1の構成)
以下、本開示の実施例について図面を参照して説明する。図1は、各実施例に係る超音波診断装置1の構成を示したブロック図である。超音波診断装置1は、システム制御部10、入力部21、表示部23、超音波プローブ30、及び基準磁場発生器40とを組み合わせることにより構成される。なお、本発明における超音波診断装置1の構成はこれに限られるものではなく、適宣構成要素を追加しても構わないし、超音波診断装置1の構成要素の幾つかを省略して、超音波診断装置1の外部に接続した装置が省略された構成要素の役割を果たすものであっても構わない。例えば後述する参照画像生成部13を超音波診断装置1の外部に接続した画像処理装置に行わせる構成としても構わない。また例えば超音波プローブ30や送受信部17、Bモード処理部18、ドプラ処理部19といった超音波画像の生成に用いる構成要素を超音波診断装置1の外部に接続した超音波画像取得装置に行わせる構成としても構わない。あるいは本実施例に述べる位置情報の対応付け機能を実行するためのプログラムを任意のコンピュータにインストールして実行することで、コンピュータを実質的に超音波診断装置1として動作させるものであっても構わない。
【0012】
超音波プローブ30はシステム制御部10に接続される部材である。超音波プローブ30は超音波振動子31を内蔵し、送受信部17から出力された駆動信号に基づいて超音波振動子31を駆動する。また、超音波プローブ30に位置センサ32が接続でき、位置センサ32は後述する基準磁場発生器40から出力される基準磁場を用いて超音波プローブ30の位置情報を検出して位置情報検出部16へと出力する。
【0013】
超音波振動子31は、送受信部17を介して入力された駆動信号に基づいて超音波を発生し、また被検体から反射された超音波を受信して電気信号へ変換する部材である。超音波振動子31は超音波を受信することにより生じた電気信号(以下、単にエコー信号と記載する)を送受信部17へと出力する。また、本実施例における超音波振動子31は、リニア形、コンベックス形、セクタ形などの2次元平面をスキャンする種々の形状によって構成されていても構わないし、あるいはメカ4Dプローブ(機械式3次元プローブ)あるいは2Dアレイプローブ(マトリクスアレイプローブ)などの3次元空間をスキャンする種々の形状により構成されるものであっても構わない。
【0014】
位置センサ32は位置情報を検出するセンサである。位置センサ32は例えば複数のコイルを3つのそれぞれ直交する平面上に配置し、各コイルに電流を検出する電流計を接続することにより構成される。コイルは後述する基準磁場発生器40から発生する基準磁場が入力されると電磁誘導により電流を発し、電流計がこの電流を検出する。位置センサ32は3つの平面に対応するコイルから出力された電流の大きさを位置情報検出部16へと出力する。後述する位置情報検出部16はこの電流の大きさを比較することにより、基準磁場発生器40から発生した基準磁場中心に対する位置センサ32の相対的な位置を算出する。また、位置センサ32は異なる位置にあるコイルから出力された電流の大きさを比較し、それぞれの基準磁場中心からの相対的な位置を算出する。更に位置情報検出部16は異なる位置にあるコイルの位置を比較することにより、超音波プローブ30が基準磁場中心に対してどれだけ傾いているかを算出する。以降の実施例では、位置センサ32が検出した基準磁場中心に対する相対的な位置と、超音波プローブ30の傾きとを総称して、単に超音波プローブ30の位置情報と記載する。なお、本実施例においては位置センサ32の構成例としてコイルを用いて磁場を検出するものを挙げたが、位置センサ32の構成はこれに限られるものではない。例えばコイル以外にホール素子などの他の磁気検出素子を用いて位置センサ32を構成しても構わない。あるいは磁気を用いて位置情報を算出する替わりに、位置センサ32を加速度センサやジャイロセンサなどを組み合わせて構成し、位置情報検出部16がこれらのセンサの出力信号を用いて位置情報を検出するようにしても構わない。
【0015】
基準磁場発生器40は基準磁場を発生する装置である。基準磁場発生器40は例えばコイルをそれぞれ直交する平面上に配置し、各コイルに電流を供給する電流源を接続することにより構成される。コイルは接続された電流源から電流が入力されると、その中心から基準磁場を発生させる。基準磁場発生器40は例えば10msごとなどの等間隔で、電流を供給するコイルを切り替えながら基準磁場を発生させる。これにより、基準磁場発生器40が発生する基準磁場の方向が等間隔で切り替わることとなる。基準磁場発生器40は基準磁場を発生させるとともに、現在どの方向に向いた基準磁場を発生させているかを示す情報を位置情報検出部16へと出力する。なお、基準磁場発生器40の構成はこれに限られるものではなく、基準磁場の方向を切り替える時間間隔は任意の時間間隔であっても構わないし、あるいは任意の時間間隔で基準磁場の発生と遮断とを切り替える構成としても構わない。
【0016】
システム制御部10は、記憶部12、参照画像生成部13、参照画像探索部15、超音波画像生成部15、位置情報検出部16、送受信部17、Bモード処理部18、ドプラ処理部19から構成される。システム制御部10は各構成要素へ制御命令を出力し、超音波診断装置1を統括的に制御する。
【0017】
送受信部17は、超音波プローブ30が受信したエコー信号を処理するアンプ回路、A/D変換器、加算器などを備える。アンプ回路は、超音波プローブ30が受信したエコー信号を増幅し、A/D変換器へ出力する。A/D変換器は、増幅されたエコー信号の受信指向性を決定するために必要な遅延時間をエコー信号に与え、加算器へと出力する。加算器は遅延時間を与えられたエコー信号を加算することで、超音波を送信するスキャンラインに対応したエコー信号を得る。送受信部21はスキャンラインに対応したエコー信号をBモード処理部18あるいはドプラ処理部19へと出力する。また送受信部17は、超音波振動子31を駆動し超音波を送信するための駆動信号を超音波超音波プローブ30へと出力する。
【0018】
Bモード処理部18は、送受信部17が出力したエコー信号の振幅強度に応じて変化するBモード信号を生成する。Bモード処理部18は生成したBモード信号を超音波画像生成部15へ出力する。
【0019】
ドプラ処理部19は、エコー信号の周波数遷移を検出して、組織あるいは血流の移動速度を抽出したドプラ信号を生成する。ドプラ処理部19はドプラ信号を超音波画像生成部15へ出力する。
【0020】
超音波画像生成部15は、Bモード処理部18あるいはドプラ処理部19から出力されたBモード信号やドプラ信号に基づいて、超音波画像を生成する。この超音波画像の生成は、例えばBモード信号から算出された画素値を超音波の送受信方向に対応した2次元平面にマッピングすることにより行われる。超音波画像生成部15が生成する超音波画像はこれに限られるものではなく、例えばドプラ信号から算出された速度値を色情報に変換した画素を2次元平面にマッピングしても構わない。あるいは、超音波プローブ30が3次元空間のスキャンを行った場合には、超音波画像生成部15はBモード信号やドプラ信号から定まる画素値を3次元空間にマッピングしたボリュームデータを生成する。そして、超音波画像生成部15はボリュームデータを任意の視点から投影した投影画像や、あるいはボリュームデータの任意の断面における画素値を2次元平面にマッピングした断層画像を生成する。以下、超音波画像生成部15が生成した超音波画像を単にライブ像と記載する。
【0021】
位置情報検出部16は、位置センサ32が出力した信号に基づいて超音波プローブ30の位置情報を算出する。先述したように、位置情報検出部16が算出する位置情報は、基準磁場発生器40が発生する基準磁場中心からの相対的な位置を示す情報と、超音波プローブ30の基準磁場中心からの傾き方向、傾き角度を示す情報とから構成される。
【0022】
記憶部12は、例えばROM(Read Only Memory)、RAM(Random Access Memory)やフラッシュメモリ、及びHDD(Hard Disk Drive)などから構成される記憶媒体である。記憶部12は超音波画像生成部15が生成した超音波画像や、CT装置やMRI(Magnetic Resonance Imaging)装置、核医学診断装置、あるいは超音波診断装置などで予め取得したボリュームデータが記憶される(以下、スキャンの前に予め記憶部12に記憶されているボリュームデータを参照ボリュームデータと記載する)。また、参照ボリュームデータに関連付けられた位置情報が記憶される。この他にも、記憶部12は、参照ボリュームデータを用いて参照画像生成部13が生成した参照画像や、超音波画像生成部15が生成したライブ像などの種々の画像情報や、後述する位置情報の対応付け機能を実行するためのプログラムを記憶する。なお、後述する実施例において各画像情報は記憶部12に格納されたものに限定されず、例えば超音波診断装置1にネットワーク接続されたサーバや外部記憶装置などに格納された画像情報を用いて各処理を行うものであっても構わない。
【0023】
参照画像生成部13は、記憶部12に記憶された参照ボリュームデータを用いて参照画像を生成する処理部である。この参照画像は、表示部23がライブ像と並べて表示するために用いる第1の用途と、参照画像探索部14がライブ像の位置情報を検出するマッチング処理を行うために用いる第2の用途との2つの用途に用いられる。参照画像生成部13は第1の用途における参照画像を生成するときには、位置情報検出部16から出力された位置情報に基づいて、ライブ画像が撮影された被検体上の部位に対応する部位を示す参照画像の生成を行う。この参照画像の生成は具体的には、まず位置情報検出部16が出力した位置情報に基づいて断層像を生成する断面の位置を設定し、参照ボリュームデータにおいて設定した断面上にあるボクセルのボクセル値を抽出する。そして参照画像生成部13は、抽出したボクセル値を2次元平面にマッピングして断層像を生成する。図2は、超音波画像生成部15が生成するライブ像100と、参照画像生成部13が生成する参照画像102との位置関係を示す図である。図2(a)はライブ像100の生成位置を、図2(b)は参照ボリュームデータ101及び参照画像生成部102が生成する参照画像102の位置をそれぞれ示している。図2(a)に示すように、超音波画像生成部15は超音波プローブ30の先端に対応する位置を撮影部位としてライブ像100を生成する。このライブ像100の撮影部位は超音波振動子31が送信する超音波の方向によって定まるため、位置情報検出部16から出力された超音波プローブ30の位置及び傾きを含む位置情報を用いることにより、撮影部位がどの位置にあるかを推定することができる。参照画像生成部13は、位置情報を用いて推定したライブ像100の撮影部位と同じ位置に断面を設定して、参照画像102として断層像の生成を行う。即ち図2に示すように、参照画像生成部13は、ライブ像100と参照画像102とが被検体P上で同じ撮影部位を捉えるように参照画像102の撮像部位を設定する。参照画像生成部13は参照画像を生成すると、これを表示部23あるいは記憶部12へと出力する。
【0024】
一方参照画像生成部13は第2の用途に用いる参照画像を生成するときには、後述する処理に基づいて、参照ボリュームデータ中に断層像を生成する領域として探索範囲を設定する。そして、参照画像生成部13は、この探索範囲内において様々な位置・傾きにおける複数の断層像を生成する。この断層像の生成において参照画像生成部13は、参照ボリュームデータからボクセル値を抽出し、ボクセル値を2次元平面にマッピングする処理については第1の用途の場合と同じ処理を行う。参照画像生成部13は参照画像を生成すると、これを参照画像探索部14あるいは記憶部12へと出力する。
【0025】
参照画像探索部14は、参照画像生成部13が第2の用途として生成した複数の参照画像と、超音波画像生成部15が生成したライブ像とを用いて、位置合わせ処理を行う処理部である。この位置合わせ処理とは具体的には、ライブ像の撮影位置と参照画像の撮影位置とが実質的に一致する参照画像を探索することによって、超音波プローブ30の位置情報を検出する座標系と、参照ボリュームデータの座標系とを一対一に対応させる処理である。以下、位置合わせ処理の流れについて述べる。参照画像探索部14は位置合わせ処理を開始すると、ライブ像と参照画像生成部13が出力した複数の参照画像との比較を行って、ライブ像と最も相関の高い参照画像を複数の参照画像の内から検出する。この参照画像の検出処理は、例えばライブ画像と複数の参照画像から、それぞれエッジ形状を検出して、ライブ画像のエッジ形状と最も類似するエッジ形状を有する参照画像を抽出することにより行われる。ここでエッジとは、画像中で画素値が急激に変化する領域として検出される領域のことを指す。図3に、ライブ像と参照画像探索部14が抽出した参照画像とを示す。図3(a)はライブ像を、図3(b)は抽出された参照画像をそれぞれ示している。図3に示すように、参照画像探索部14が抽出した参照画像の撮影位置は、ライブ像の撮影位置と実質的に同じものとなる。参照画像探索部14はライブ像と撮影位置が実質的に一致する参照画像を抽出すると、ライブ像の位置情報、即ち超音波プローブ30の位置及び傾きの情報と、抽出した参照画像の断面の位置及び傾きの情報とを対応させて、参照ボリュームデータの座標系を超音波プローブ30の位置情報の座標系に変換する処理を行い、位置合わせ処理を完了する。以上の位置合わせ処理によって、超音波プローブ30の位置情報が定まれば、超音波プローブ30の撮影位置と実質的に同じ撮影位置における、参照ボリュームデータ上の断層像の位置が定まることになる。参照画像探索部14は位置合わせ処理を行い座標系の変換を行うと、変換された座標系の情報を参照画像生成部13へと出力する。参照画像生成部13は第1の用途における参照画像を生成する際に、この変換された座標系の情報を使用して超音波プローブ30の位置情報に基づいて参照画像を生成する断層像の位置を決定する。
【0026】
なお、本実施例における位置合わせ処理は、ここに述べたものに限定されない。例えばライブ像を用いて参照画像を抽出する処理は、エッジによるものでなくても構わない。例えばライブ像から画素変化のベクトル情報や特徴点の情報などを検出し、このベクトル情報や特徴点と最も類似するベクトル情報や特徴点を有する参照画像を探すことにより参照画像の抽出を行っても構わない。あるいは単にライブ像と参照画像との間で画素値の差分を求め、この差分が最も小さくなる参照画像を最も相関の高い参照画像として抽出しても構わない。また、参照画像探索部14はライブ像の全体と相関の高い参照画像を探索するものでなくてもよい。例えばライブ像の下半分や、ライブ像のうち入力部21を介して操作者に指定された画像領域など、ライブ像の一部分と相関の高い参照画像を探索するものであっても構わない。また、座標系の変換処理において、参照ボリュームデータにおける座標系を超音波プローブ30の位置情報における座標系に変換する代わりに、超音波プローブ30の位置情報における座標系を参照ボリュームデータにおける座標系に変換しても構わない。
【0027】
入力部21は、例えば機械的なボタン、ダイヤル、トラックボール、ジョイスティック、スライダやホイールなどの種々の操作デバイスを用いて構成され、オペレータの入力操作を受け付けて、入力操作を電気信号に変換してシステム制御部10へ出力する部材である。入力部21は受け付けた入力操作に応じて、例えば送受信部17にスキャンの開始・停止を指示する指示信号や、参照画像とライブ像とを並べて表示部23に表示させる指示信号をシステム制御部10へ出力する。
【0028】
表示部23は、例えばLCD(Lucid Crystal Display)ディスプレイや有機EL(Electro luminescence)ディスプレイ、あるいはブラウン管ディスプレイなどの任意のディスプレイにより構成される。表示部23は、参照画像やライブ像を表示する。あるいは、送受信部17がスキャンを行う際のスキャンパラメータや、超音波画像生成部15がライブ像を生成する際の画像化パラメータ、参照画像生成部13が参照ボリュームデータから参照画像を生成する際の画像化パラメータ、種々のメッセージなどを表示する。
【0029】
(位置合わせ処理の流れ)
先に述べた各構成要素に基づいて、超音波診断装置1はライブ像と参照画像を用いた位置合わせ処理および、ライブ像と参照画像の生成及び表示を行う。図4は、超音波診断装置1が位置合わせ処理を行った上で、ライブ像と参照画像とを並べて表示する表示処理を行う際の、一連の処理の流れを示したフローチャートである。以下、図4に沿って処理の流れについて述べる。なお、図4の処理を行うにあたって、記憶部12には参照ボリュームデータが予め記憶されているものとする。
【0030】
まず、超音波診断装置1の使用者が処理を開始する(ステップ1000)と、システム制御部10は記憶部12から参照ボリュームデータを読み出す(ステップ1001)。続いて、システム制御部10は超音波プローブ30によりスキャンを行って、被検体Pのエコー信号を収集して、超音波画像生成部15がエコー信号に基づいてライブ像を生成して表示部23に表示する(ステップ1002)。なお、表示部23はライブ像の他に、超音波プローブ30の操作の目安となるように、参照ボリュームデータ中の所定位置の断面における参照画像(例えば、剣状突起を含む参照画像)を並べて表示しても構わない。次に、位置情報検出部16は超音波プローブ30の位置情報を検出して、超音波プローブ30が一定時間以上静止しているか否かを判断する(ステップ1003)。この一定時間は入力部21の入力操作によって任意の値が指定され、例えば1秒間などの値が用いられる。また、静止しているか否かの判断は、例えば位置情報の変動が予め定められた閾値の範囲内に収まっているか否かを判断することにより行われる。従って、本実施例でいう静止は超音波プローブ30が完全に静止している場合のみならず、所定の範囲内で僅かに動いている場合を含むものであって構わない。位置情報検出部16が超音波プローブ30は静止していないと判断すると(ステップ1003のNo)、システム制御部10はステップ1002に戻ってライブ像の生成及び表示を続ける。
【0031】
一方位置情報検出部16が超音波プローブ30は一定時間以上静止していると判断すると(ステップ1003のYes)、参照画像探索部14は、ライブ像と相関の高い参照画像を探索する(ステップ1004)。このとき、参照画像探索部14は探索に用いるライブ像として、超音波プローブ30が静止していた時間領域のうち、中間の時間領域において撮影されたライブ像を用いる。例えば一定時間が1秒間として設定されており、位置情報検出部16が超音波プローブ30の静止状態が1秒間維持されたことを検出した場合には、参照画像探索部14は超音波プローブ30が静止しはじめてから0.5秒が経過した時点におけるライブ像を用いて探索を行う。これにより、参照画像探索部14は超音波プローブ30の静止が確からしい時間帯に撮影されたライブ像を用いて探索を行うことができる。なお、探索に用いるライブ像はこれに限られるものではなく、例えば一定時間が経過した時点で撮影されたライブ像を用いて探索を行っても構わないし、入力部11が別途参照画像を探索する指示信号を入力するものであって、この指示信号をシステム制御部10が受け付けた時点におけるライブ像を用いて探索を行っても構わないし、あるいは記憶部12から複数のライブ像を読み出して表示し、探索に用いるライブ像を入力部11が選択するものであっても構わない。また、表示部23はステップ1004の処理を行う際に、探索に用いるライブ像をフリーズ表示するものであっても構わない。なお、ステップ1004の処理において、参照画像探索部14は参照ボリュームデータの全ての領域を探索領域として、ライブ像と撮影位置の一致する参照画像の探索を行う。
【0032】
ステップ1004において参照画像探索部14がライブ像と撮影位置の一致する参照画像を抽出すると、参照画像探索部14はライブ像を撮影した時点における超音波プローブ30の位置情報と、抽出した参照画像の参照ボリュームデータにおける位置情報とを用いて、参照ボリュームデータにおける座標系を超音波プローブ30の位置情報における座標系に変換する(ステップ1005)。この変換された座標系において、ライブ像の撮影位置と参照画像の撮影位置は同一となるように、参照画像探索部14は座標系の変換を行う。参照画像探索部14は変換した参照ボリュームデータにおける座標系の情報を参照画像生成部13へと出力する。
【0033】
ステップ1005において座標系の変換処理が終了すると、システム制御部10は再び超音波プローブ30によりスキャンを行って、被検体Pのエコー信号を収集して、超音波画像生成部15がエコー信号に基づいてライブ像を生成する(ステップ1006)。次に参照画像生成部13は、ステップ1006においてライブ像を生成した時点における超音波プローブ30の位置情報に対応する位置の参照画像を生成する(ステップ1007)。即ち、ステップ1007において生成される参照画像の撮影位置は、ライブ像の撮影位置と実質的に同じものとなる。参照画像生成部13が参照画像を生成すると、表示部23はライブ像と参照画像とを並べて表示する(ステップ1008)。次に、システム制御部10は、入力部21を介してスキャンを終了する指示があったか否かを判断する(ステップ1009)。スキャンを終了する指示がなかった場合には(ステップ1009のNo)、システム制御部10はステップ1006に戻ってライブ像及び参照画像の生成を続ける。ステップ1006からステップ1009までの処理を繰り返して行うことにより、超音波プローブ30の位置の変化に追随してライブ像と、参照画像が変化することとなる。一方スキャンを終了する指示があった場合には(ステップ1009のYes)、システム制御部10は処理を終了する(ステップ1010)。
【0034】
以上の処理により、超音波診断装置1は位置合わせ処理及びライブ像と参照画像の表示処理を行う。超音波プローブ30の静止を契機に位置合わせ処理を行うことにより、操作者は位置合わせ処理を開始するための入力操作を省くことができ、操作者の操作負担を軽減することができる。
【0035】
また、超音波診断装置1はライブ像と相関の高い参照画像を探索して位置合わせ処理を行う。ライブ像と相関の高い参照画像を自動的に探索することにより、位置合わせ処理を超音波プローブ30の操作の巧拙に関らず高精度で行うことができる。
【0036】
また、超音波診断装置1は位置合わせ処理が行われた後は、ライブ像と撮影位置の一致する参照画像を生成してライブ像と並べて表示する。これにより、操作者は参照画像とライブ像とを見比べながら診断を行うことができる。
【0037】
(位置ずれの補正処理)
図4を用いて説明した処理によって、超音波診断装置1は同じ撮影位置にあるライブ像と参照画像とを並べて表示する。しかし、例えば位置センサ32が出力する位置情報の誤差などが原因で、超音波プローブ30の位置が位置センサ32の位置情報に正しく反映されていない場合が考えられる。この場合には、例えば超音波プローブ30が移動するにつれてライブ像の撮影位置と参照ボリュームデータ上の参照画像の撮影位置との誤差(以下、この誤差を単に位置ずれと記載する)が蓄積し、ライブ像の撮影位置と参照画像の撮影位置とがずれてしまうために、操作者は正しい診断を行うことができない。そこで、超音波診断装置1は位置センサ32の位置情報の誤差を補償するために、図4を用いて説明した処理に加えて位置ずれを補正する処理を行っても構わない。図5は、図4の処理に加えて位置ずれの補正処理を行う場合の、超音波診断装置1の一連の処理の流れを示したフローチャートである。以下、図5に沿って処理の流れについて述べる。
【0038】
なお、図5のステップ2000からステップ2003までの処理と、ステップ2007からステップ2010までの処理については、図4のステップ1000からステップ1003までの処理と、ステップ1006からステップ1009までの処理と同様であるため、説明を省略する。
【0039】
ステップ2003において位置情報検出部16が、超音波プローブ30が一定時間静止していたことを検出すると(ステップ2003のYes)、参照画像探索部14は、位置合わせ処理を行う際の参照画像の探索範囲を参照ボリュームデータの全体として設定する(ステップ2004)。参照画像探索部14は探索範囲を設定すると、ライブ像と相関の高い参照画像を探索範囲内の参照ボリュームデータから探索する(ステップ2005)。この時点においては、参照ボリュームデータの全体が探索範囲として設定されているため、参照画像探索部14は例えば参照ボリュームデータの全ての位置・傾きについて参照画像の生成を行い、ライブ画像との比較を行うこととなる。ステップ2005で参照画像探索部14がライブ像と相関の高い参照画像を抽出すると、参照画像探索部14はライブ像を撮影した時点における超音波プローブ30の位置情報と、抽出した参照画像の参照ボリュームデータにおける位置情報とを用いて、参照ボリュームデータにおける座標系を超音波プローブ30の位置情報における座標系に変換する(ステップ2006)。この変換された座標系において、ライブ像の撮影位置と参照画像の撮影位置は同一となるように、参照画像探索部14は座標系の変換を行う。ステップ2007からステップ2009までの処理によって表示部23に撮影位置が同じライブ像と参照画像とが表示されると、システム制御部10は、入力部21を介してスキャンを終了する指示があったか否かを判断する(ステップ2010)。スキャンを終了する指示がなかった場合には(ステップ2010のNo)、参照画像探索部14は例えばステップ2007において生成されたライブ像の撮影位置の近傍を探索範囲として設定する(ステップ2011)。ここで言う近傍とは、ライブ像の撮影位置に対して傾きと位置が所定の範囲内にある領域のことを指す。図6にステップ2004とステップ2011で設定された探索範囲の違いを示す。図6(a)にステップ2004で設定された探索範囲201を、図6(b)にステップ2011で設定された探索範囲202をそれぞれ示している。図6(a)に示すようにステップ2004においては、参照画像探索部14が設定する探索範囲201は、参照ボリュームデータの領域と同一となる。一方図6(b)に示すようにステップ2011においては、参照画像探索部14は超音波プローブ30を用いて撮影したライブ像の撮影位置の近傍のみを探索範囲として設定する。従って、ステップ2004において設定された探索範囲に比べて、ステップ2011において設定された探索範囲は狭いものとなる。ステップ2011において参照画像探索部14が探索範囲を設定すると、参照画像探索部14はライブ像の相関の高い参照画像を探索範囲内の参照ボリュームデータから探索する(ステップ2005)。この時点においては、参照ボリュームデータのうちライブ像撮影位置の近傍のみが探索範囲として設定されているため、参照ボリュームデータの全体が探索範囲である場合に比べて少ない数の参照画像が生成され、ライブ画像と比較される。生成及び比較される参照画像の数が少なくなることにより、参照ボリュームデータの全体が探索範囲である場合に比較して、参照画像の抽出が高速に行われる。ステップ2005で参照画像探索部14がライブ像と相関の高い参照画像を抽出すると、システム制御部10はステップ2006での座標系の変換処理を行う。
【0040】
一方ステップ2010でスキャンを終了する指示があった場合には(ステップ2010のYes)、システム制御部10は処理を終了する(ステップ2012)。
【0041】
以上の処理により、超音波診断装置1はライブ像と参照画像とを並べて表示する処理を行うと共に、並べて表示したライブ像を使って参照画像を探索し、抽出された参照画像を用いて座標系の変換を行う。この処理によって座標系の変換処理が随時行われるために、もし位置センサ32が出力する位置情報に誤差があった場合であっても、常に正しく対応付けられた座標系を用いてライブ像と同じ撮影位置における参照画像を抽出し表示することができる。
【0042】
また、超音波診断装置1は参照ボリュームデータのうちライブ像撮影位置の近傍にあるデータのみを使って参照画像の探索処理を行う。これにより、参照画像の探索処理を高速に行うことができ、ライブ像と参照画像の表示処理に併せてリアルタイムで座標系の変換処理を行うことができる。
【0043】
なお、本実施例における超音波診断装置1の構成はこれに限定されず、適宣構成や動作を省略し、あるいは追加しても構わない。例えば図4のステップ1004や図5のステップ1005において、ライブ像内にアーチファクトが写りこんでいることや、あるいは参照ボリュームデータから参照画像を生成する際の画像化パラメータ(例えば、ボクセル値から2次元平面にマッピングする画素値を算出する際に用いる係数、即ちレンダリングレンジ)が適切に設定されていないことなどが原因となって、参照画像探索部14がライブ像と相関の高い参照画像を参照ボリュームデータ中から探索できない事態が発生しうる。システム制御部10は参照画像探索部14が相関の高い参照画像を探索できなかった場合には、例えば表示部23に探索が行えなかった旨を示すメッセージを表示してもよい。また、システム制御部10は探索が行えなかった旨を示すメッセージを表示するとともに、参照画像を生成する際の画像化パラメータを変更する操作を促すメッセージを表示しても良い。また、システム制御部10は探索が行えなかった旨を示すメッセージを表示すると共に、入力部21を介した操作によって座標系の変換処理を行う操作を促すメッセージを表示してもよい。
【0044】
また、本実施例においては超音波画像生成部15が2次元のライブ像を生成し、参照画像探索部14が2次元のライブ像と相関の高い2次元の参照画像を探索するものとして説明したが、ライブ像及び参照画像は2次元のものに限られない。例えば超音波画像生成部15が3次元のボリュームデータをライブ像として生成し、参照画像探索部14が3次元のライブ像と相関の高い3次元のボリュームデータを参照画像として探索するものであっても構わない。あるいは超音波画像生成部15が動画像のライブ像を生成し、参照画像14が動画像のライブ像のうちいずれかの1フレームと相関の高い2次元の参照画像を探索するものであっても構わない。
【0045】
以上に本発明のいくつかの実施例を説明したが、これらの実施例は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施例は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施例やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0046】
P 被検体
1 超音波診断装置
10 システム制御部
12 記憶部
13 参照画像生成部
14 参照画像探索部
15 超音波画像生成部
16 位置情報検出部
17 送受信部
18 Bモード処理部
19 ドプラ処理部
21 入力部
23 表示部
30 超音波プローブ
31 超音波振動子
32 位置センサ
40 基準磁場発生器
【特許請求の範囲】
【請求項1】
スキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号を得る超音波プローブと、
前記エコー信号に基づいて超音波画像を生成する超音波画像生成手段と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出手段と、
前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する静止検出手段と、
ボリュームデータの所定の位置における参照画像を生成する参照画像生成手段と、
前記静止の検出に基づいて、前記超音波画像に対応する参照画像を第1の参照画像として抽出する抽出手段と、
前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す第1参照画像位置情報とを関連付ける関連付け手段と、
前記参照画像生成手段を用いて、前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成して、前記第2の参照画像と前記超音波画像とを並べて表示する表示手段と
を有することを特徴とする超音波診断装置。
【請求項2】
前記抽出手段は、
前記参照画像生成手段が生成した画像と、前記静止を検出した時刻に基づいて定まる所定の時刻に生成された前記超音波画像とを比較して、
前記比較に基づいて前記超音波画像と相関の高い前記参照画像を前記第1の参照画像として抽出する
ことを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記抽出手段は、
前記表示手段に前記第2の参照画像と前記超音波画像とを並べて表示するときに、
前記参照画像生成手段が生成した画像のうち、前記並べて表示された超音波画像に対応する参照画像を第3の参照画像として抽出するものであって、
前記関連付け手段は、前記プローブ位置情報と、前記ボリュームデータにおいて前記第3の参照画像が生成された位置を示す第3参照画像位置情報とを関連付けることにより、前記プローブ位置情報の関連付けを更新する
ことを特徴とする請求項1または2に記載の超音波診断装置。
【請求項4】
前記抽出手段は、
前記ボリュームデータのうち、前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の領域内のデータに基づいて生成された前記参照画像を用いて、前記第3の参照画像の抽出を行う
ことを特徴とする請求項3に記載の超音波診断装置。
【請求項5】
コンピュータに、
エコー信号に基づいて超音波画像を生成する機能と、
前記エコー信号を取得した超音波プローブの位置を示すプローブ位置情報を検出する機能と、
前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する機能と、
ボリュームデータの所定の位置における参照画像を生成する機能と、
前記静止の検出に基づいて前記超音波画像に対応する参照画像を第1の参照画像として抽出する機能と、
前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す参照画像位置情報とを関連付ける機能と、
前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成する機能と、
前記第2の参照画像と前記超音波画像とを並べて表示する機能と
を実現させることを特徴とする超音波画像処理プログラム。
【請求項1】
スキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号を得る超音波プローブと、
前記エコー信号に基づいて超音波画像を生成する超音波画像生成手段と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出手段と、
前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する静止検出手段と、
ボリュームデータの所定の位置における参照画像を生成する参照画像生成手段と、
前記静止の検出に基づいて、前記超音波画像に対応する参照画像を第1の参照画像として抽出する抽出手段と、
前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す第1参照画像位置情報とを関連付ける関連付け手段と、
前記参照画像生成手段を用いて、前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成して、前記第2の参照画像と前記超音波画像とを並べて表示する表示手段と
を有することを特徴とする超音波診断装置。
【請求項2】
前記抽出手段は、
前記参照画像生成手段が生成した画像と、前記静止を検出した時刻に基づいて定まる所定の時刻に生成された前記超音波画像とを比較して、
前記比較に基づいて前記超音波画像と相関の高い前記参照画像を前記第1の参照画像として抽出する
ことを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記抽出手段は、
前記表示手段に前記第2の参照画像と前記超音波画像とを並べて表示するときに、
前記参照画像生成手段が生成した画像のうち、前記並べて表示された超音波画像に対応する参照画像を第3の参照画像として抽出するものであって、
前記関連付け手段は、前記プローブ位置情報と、前記ボリュームデータにおいて前記第3の参照画像が生成された位置を示す第3参照画像位置情報とを関連付けることにより、前記プローブ位置情報の関連付けを更新する
ことを特徴とする請求項1または2に記載の超音波診断装置。
【請求項4】
前記抽出手段は、
前記ボリュームデータのうち、前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の領域内のデータに基づいて生成された前記参照画像を用いて、前記第3の参照画像の抽出を行う
ことを特徴とする請求項3に記載の超音波診断装置。
【請求項5】
コンピュータに、
エコー信号に基づいて超音波画像を生成する機能と、
前記エコー信号を取得した超音波プローブの位置を示すプローブ位置情報を検出する機能と、
前記プローブ位置情報に基づいて前記超音波プローブが静止していることを検出する機能と、
ボリュームデータの所定の位置における参照画像を生成する機能と、
前記静止の検出に基づいて前記超音波画像に対応する参照画像を第1の参照画像として抽出する機能と、
前記プローブ位置情報と、前記ボリュームデータにおいて前記第1の参照画像が生成された位置を示す参照画像位置情報とを関連付ける機能と、
前記関連付けされた前記プローブ位置情報に基づいて定まる、前記ボリュームデータにおける所定の位置の参照画像を第2の参照画像として生成する機能と、
前記第2の参照画像と前記超音波画像とを並べて表示する機能と
を実現させることを特徴とする超音波画像処理プログラム。
【図1】


【図2】

【図3】

【図4】

【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−170749(P2012−170749A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−37598(P2011−37598)
【出願日】平成23年2月23日(2011.2.23)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月23日(2011.2.23)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]