
超音波診断装置、及び超音波診断装置の制御プログラム
【課題】 ドプラ波形などの超音波画像を取得する手技をより簡便に行う。
【解決手段】 実施形態によれば、スキャン領域を設定する入力手段と、前記設定された
スキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号を得る超音
波プローブと、前記エコー信号に基づいて超音波画像を生成する超音波画像取得手段と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出手
段と、所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する記憶手
段と、前記位置情報検出手段が検出したプローブ位置情報と、前記基準位置情報とに基づ
いて、前記スキャン領域の位置を変更するスキャン領域制御手段と、前記スキャン位置及
び前記超音波画像を表示する表示手段とを有する。
【解決手段】 実施形態によれば、スキャン領域を設定する入力手段と、前記設定された
スキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号を得る超音
波プローブと、前記エコー信号に基づいて超音波画像を生成する超音波画像取得手段と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出手
段と、所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する記憶手
段と、前記位置情報検出手段が検出したプローブ位置情報と、前記基準位置情報とに基づ
いて、前記スキャン領域の位置を変更するスキャン領域制御手段と、前記スキャン位置及
び前記超音波画像を表示する表示手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、超音波画像を用いて診断を行う超音波診断装置、及び超音波診断装置の制御
プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに内蔵された超音波振動子から超音波を被験体に対
して送信し、被検体内で生じた超音波(以下、単にエコー信号と記載する)を超音波振動
子で受信して、エコー信号に基づく超音波画像を生成する装置である。
【0003】
近年、被検体の任意の位置における血流速度を計測する方法として、ドプラスペクトラ
ム法が普及している。このドプラスペクトラム法では、被検体の同一部位に対して一定間
隔で複数回の超音波送受波を行い、血球などの移動反射体において反射した超音波からド
プラ信号を検出する。そして、このドプラ信号にスペクトル解析を施すことにより、ドプ
ラ波形(ドプラスペクトラムの時間変化をグラフ化した画像データ)を生成する。このド
プラ波形の時間変化から、例えば任意の位置の血流速度の最大流速や平均流速といった血
流に関する情報を計測することができる(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−240198号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
先述したような超音波診断装置を用いてドプラスペクトラム法を用いた計測を行う場合
の、手技の流れについて述べる。まず操作者は被検体の計測部位へ向けて超音波を送受信
する超音波プローブを当接させる。超音波診断装置はBモード送受信を行い、計測部位周
辺のBモード画像を取得し表示する。操作者は超音波のスキャン範囲中に正しく計測部位
が含まれていることをBモード画像により確認すると、Bモード送受信を停止してBモード
画像の更新を停止させたフリーズ表示に切り替える。更に操作者はフリーズ表示したBモ
ード画像中にサンプルゲートと呼ばれるマーカを配置し、ドプラスペクトラムを計測する
部位を指定する。例えばサンプルゲートは、図2に示されるようなパルスドプラ計測の方
向を示す長い直線と、計測部位を指定する短い直線の組によって示される。
【0006】
操作者がBモード画像中にサンプルゲートを指定すると、超音波診断装置はサンプルゲ
ートによって指定された計測部位に向けてドプラ送受信を行い、計測部位から反射された
ドプラ信号を収集する。超音波診断装置は収集されたドプラ信号にスペクトル解析を施し
てドプラ波形を生成し、Bモード画像と並べてドプラ波形を表示する。操作者は表示され
たドプラ波形が所望の値になっていることを確認すると、ドプラ送受信を停止させてドプ
ラ波形の更新を停止されたフリーズ表示に切り替える。更に操作者はフリーズ表示したド
プラ波形に対し、計測値取得用のマーカを配置する。超音波診断装置は配置されたマーカ
の位置に基づいて、例えば流速の最大値と最小値の比率などの指標値を計測し表示する。
操作者は表示した指標値に基づいて、計測部位に関連する疾患の有無などを判断すること
ができる。
【0007】
以上の一連の手技において、操作者は超音波プローブを被検体に対して固定した状態で
Bモード画像をフリーズ表示した以降の操作を行わなければならない。超音波プローブあ
るいは被検体が移動してしまった場合にはサンプルゲートによって設定した計測部位と計
測を行う部位との位置関係がずれてしまい、所望の部位からのドプラ信号が得られないた
めである。しかし、操作者が超音波診断装置を操作する際に生じる体の動きや、被検体自
身の呼吸などが原因で生じる体動により、超音波プローブと被検体との位置関係を固定し
続けるのは難しく、また位置関係がずれてしまった場合であっても、画面上に表示される
フリーズ表示したBモード画像とサンプルゲートからでは操作者がずれを検知できないと
いう課題があった。
【0008】
そこで本願においては、ドプラ波形などの超音波画像を取得する手技をより簡便に行う
ことを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため実施形態の超音波診断装置においては、スキャン領域を設定す
る入力手段と、前記設定されたスキャン領域へ超音波を送信し、その反射波を受信するこ
とによりエコー信号を得る超音波プローブと、前記エコー信号に基づいて超音波画像を生
成する超音波画像取得手段と、前記超音波プローブの位置に基づいて定まるプローブ位置
情報を検出する位置情報検出手段と、所定の時刻における前記プローブ位置情報を、基準
位置情報として記憶する記憶手段と、前記位置情報検出手段が検出したプローブ位置情報
と、前記基準位置情報とに基づいて、前記スキャン領域の位置を変更するスキャン領域制
御手段と、前記スキャン位置及び前記超音波画像を表示する表示手段とを有する。
【0010】
また、上記課題を解決するための実施形態の超音波診断装置の制御プログラムにおいて
は、コンピュータに、スキャン領域を設定する入力機能と、超音波プローブを用いて前記
設定されたスキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号
を得る送受信機能と、前記エコー信号に基づいて超音波画像を生成する超音波画像取得機
能と、前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報
検出機能と、所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する
記憶機能と、前記位置情報検出機能が検出したプローブ位置情報と、前記基準位置情報と
に基づいて、前記スキャン領域の位置を変更するスキャン領域制御機能と、前記スキャン
位置及び前記超音波画像を表示する表示機能とを機能させる。
【図面の簡単な説明】
【0011】
【図1】実施形態に係る超音波診断装置の内部構成を示すブロック図。
【図2】実施形態に係る、サンプルゲートにより指定した計測位置のドプラ波形を示す図。
【図3】実施形態に係る、Mモード画像の取得位置をマーカ指定を示す図。
【図4】実施形態に係る、超音波プローブの移動あるいは被検体の体動によりスキャン面がずれる様子を示す図。
【図5】実施形態に係る、超音波プローブの移動によってずれたサンプルゲート位置を補正する動作を示す図。
【図6】実施形態に係る、被検体の体動によってずれたサンプルゲート位置を補正する動作を示す図。
【図7】実施形態に係る、サンプルゲート位置を補正する際の画面表示を示す図。
【図8】実施形態に係る、再撮影指示の画面表示を示す図。
【図9】実施形態に係る、サンプルゲート位置の補正処理を示すフローチャート。
【図10】実施形態に係る、サンプルゲート位置と撮像範囲とを補正する動作を示す図。
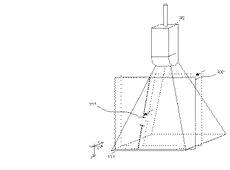
【図11】実施形態に係る、2Dアレイ型の超音波プローブにおいてサンプルゲートによりドプラ計測位置を指定する動作を示す図。
【図12】実施形態に係る、2Dアレイ型の超音波プローブにおいてサンプルゲート位置と撮像範囲とを補正する動作を示す図。
【発明を実施するための形態】
【0012】
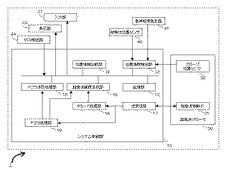
以下、本開示の実施形態について図面を参照して説明する。図1は、各実施形態に係る
超音波診断装置1の構成を示したブロック図である。超音波診断装置1は、システム制御
部10、入力部21、表示部23、ECG検出部24、超音波プローブ30、及び基準磁場
発生器41、被検体位置センサ42をそれぞれ組み合わせることにより構成される。なお
、本発明における超音波診断装置1の構成はこれに限られるものではなく、適宣構成要素
を追加しても構わないし、超音波診断装置1の構成要素の幾つかを省略して、超音波診断
装置1の外部に接続した装置が省略された構成要素の役割を果たすものであっても構わな
い。また例えば超音波プローブ30や超音波画像生成部15、ドプラ波形処理部16、送
受信部17、Bモード処理部18、及びドプラ処理部19といった超音波画像の生成に用
いる構成要素を超音波診断装置1の外部に接続した超音波画像取得装置に行わせる構成と
しても構わない。あるいは本実施形態に述べる位置情報の対応付け機能を実行するための
プログラムを任意のコンピュータにインストールして実行することで、コンピュータを実
質的に超音波診断装置1として動作させるものであっても構わない。なお、本実施形態に
おいては後述するドプラ波形、Bモード画像、カラードプラ画像、投影画像、断層画像、
及びMモード画像などの、超音波診断装置1に表示される臨床画像を総称して超音波画像
と記載する。
【0013】
超音波プローブ30はシステム制御部10に接続される。超音波プローブ30は超音波
振動子31を内蔵し、送受信部17から出力された駆動信号に基づいて超音波振動子31
を駆動する。また、超音波プローブ30はプローブプローブ位置センサ32を内蔵し、プ
ローブ位置センサ32は後述する基準磁場発生器41から出力される基準磁場に基づいて
超音波プローブ30の位置情報を検出し、位置情報検出部13へと出力する。
【0014】
超音波振動子31は、送受信部17を介して入力された駆動信号に基づいて超音波を発
生し、また被検体から反射された超音波を受信して電気信号へ変換する。超音波振動子3
1は超音波を受信することにより生じた電気信号(以下、単にエコー信号と記載する)を
送受信部17へと出力する。また、本実施形態における超音波振動子31は、リニア形、
コンベックス形、セクタ形などの2次元平面をスキャンする種々の形状によって構成され
ていても構わないし、あるいはメカ4Dプローブ(機械式3次元プローブ)あるいは2D
アレイプローブ(マトリクスアレイプローブ)などの3次元空間をスキャンする種々の形
状により構成されるものであっても構わない。
【0015】
プローブ位置センサ32は超音波プローブ30に取り付けられ、超音波プローブ30の
位置情報を検出するセンサである。プローブ位置センサ32は例えば複数のコイルを3つ
のそれぞれ直交する平面上に配置し、各コイルに電流を検出する電流計を接続することに
より構成される。コイルは後述する基準磁場発生器41から発生する基準磁場が入力され
ると電磁誘導により電流を発し、電流計がこの電流値を検出する。プローブ位置センサ3
2は3つの平面に対応するコイルから出力された電流値の大きさを位置情報検出部13へ
と出力する。後述する位置情報検出部13はこの電流値の大きさや、電流値の変異を比較
することにより、基準磁場発生器41から発生した基準磁場中心に対するプローブ位置セ
ンサ32の相対的な位置を算出する。また、プローブ位置センサ32は異なる位置にある
コイルから出力された電流値の大きさを比較し、それぞれの基準磁場中心からの相対的な
位置を算出する。更に位置情報検出部13は異なる位置にあるコイルの位置を比較するこ
とにより、超音波プローブ30が基準磁場中心に対してどれだけ傾いているかを算出する
。以降の実施形態では、プローブ位置センサ32が検出した基準磁場中心に対する相対的
な位置に関する情報と、超音波プローブ30の傾きに関する情報とを総称して、単に超音
波プローブ30の位置情報と記載する。なお、本実施形態においてはプローブ位置センサ
32の構成例としてコイルを用いて磁場を検出するものを挙げたが、プローブ位置センサ
32の構成はこれに限られるものではない。例えばコイル以外にホール素子などの他の磁
気検出素子を用いてプローブ位置センサ32を構成しても構わない。あるいはプローブ位
置センサ32をジャイロセンサを用いて構成しても構わない。ジャイロセンサは、例えば
微小な金属板や金属棒からなる検出子を回転させ、回転によって検出子に加えられる力(
コリオリ力)を電気信号に変換して検出するセンサである。ジャイロセンサが傾くことに
よって、検出子に加えられるコリオリ力が変化するため、ジャイロセンサは該変化に基づ
いてプローブの傾き情報を検出する。
【0016】
被検体位置センサ42は被検体に取り付けられ、被検体の位置情報を検出するセンサで
ある。被検体位置センサ42は例えば被検体の肩など、被検体の体動を反映しやすい部位
に取り付けられ、被検体の基準磁場中心からの相対的な位置と、傾きに関する情報を位置
情報として位置情報検出部13へと出力する。被検体位置センサ42はプローブ位置セン
サ32と同様に例えば複数のコイルを組み合わせることによって構成されるが、ホール素
子、ジャイロセンサ、あるいは加速度センサなど任意の素子を用いて被検体位置センサ4
2を構成するものであっても構わない。また、検査中の被検体は例えば寝台に寝ていたり
、椅子に座っているなど、傾き方向に関しては安定した状態で検査を受けることがある。
このような場合には被検体位置センサ42のうち傾きを検出する構成を省略し、被検体の
位置情報のみを出力する構成としても構わない。またあるいは、被検体の動きが十分小さ
い場合には、被検体位置センサ42の構成自体を省略し、プローブ位置センサ32が検出
する超音波プローブ30の位置情報に基づいて後述する補正処理を行っても構わない。
【0017】
基準磁場発生器41は基準磁場を発生する装置である。基準磁場発生器41は例えばコ
イルをそれぞれ直交する平面上に配置し、各コイルに電気信号を供給する電流源を接続す
ることにより構成される。コイルは接続された電流源から電気信号が入力されると、その
中心から基準磁場を発生させる。基準磁場発生器41は例えば10msごとなどの等間隔
で、電気信号を供給するコイルを切り替えながら基準磁場を発生させる。これにより、基
準磁場発生器41が発生する基準磁場の方向が等間隔で切り替わることとなる。基準磁場
発生器41は基準磁場を発生させるとともに、現在どの方向に向いた基準磁場を発生させ
ているかを示す情報を位置情報検出部13へと出力する。なお、基準磁場発生器41の構
成はこれに限られるものではなく、基準磁場の方向を切り替える時間間隔は任意の時間間
隔であっても構わないし、あるいは任意の時間間隔で基準磁場の発生と遮断とを切り替え
る構成としても構わない。
【0018】
システム制御部10は、記憶部12、位置情報検出部13、位置情報比較部14、ドプ
ラ波形処理部16、送受信部17、Bモード処理部18、及びドプラ処理部19から構成
される。システム制御部10は各構成要素に制御命令を出力し、超音波診断装置1を統括
的に制御する。
【0019】
送受信部17は、超音波プローブ30が受信したエコー信号を処理するアンプ回路、A
/D変換器、加算器などを備える。アンプ回路は、超音波プローブ30が受信したエコー
信号を増幅し、A/D変換器へ出力する。A/D変換器は、増幅されたエコー信号の受信
指向性を決定するために必要な遅延時間をエコー信号に与え、加算器へと出力する。加算
器は遅延時間を与えられたエコー信号を加算することで、超音波を送信するスキャンライ
ンに対応したエコー信号を得る。送受信部17はスキャンラインに対応したエコー信号を
Bモード処理部18あるいはドプラ処理部19へと出力する。また送受信部17は、超音
波振動子31を駆動し超音波を送信するための駆動信号を超音波プローブ30へと出力す
る。
【0020】
Bモード処理部18は、送受信部17が出力したエコー信号の振幅強度に応じて、Bモ
ード画像における輝度値を定めたBモード信号を生成する。Bモード信号は、例えばBモ
ード画像における画素の座標と、その画素の輝度値とを組み合わせた信号として生成され
る。Bモード処理部18は生成したBモード信号を超音波画像生成部15へ出力する。
【0021】
ドプラ処理部19は、送受信部17が出力したエコー信号の周波数遷移を検出して、組
織や血流などスキャン領域中の移動体の移動速度を抽出したドプラ信号を生成する。ドプ
ラ処理部19は、送受信部17が行うドプラ計測の手法に応じて出力するドプラ信号の抽
出方法及び信号の出力先を切り替える。具体的には送受信部17は、カラードプラによる
ドプラ計測と、パルスドプラによるドプラ計測の2種類のドプラ計測を行う。カラードプ
ラによるドプラ計測を行う場合は、ドプラ処理部19はスキャン面全体に対してドプラ送
受信を行い、周波数遷移によって抽出された移動速度を色相に割り当てたカラードプラ信
号を生成する。カラードプラ信号は、例えばカラードプラ画像における画素の座標と、そ
の画素の色相とを組み合わせた信号として生成される。ドプラ処理部19はカラードプラ
信号を生成すると、これを超音波画像生成部15へと出力する。一方パルスドプラによる
ドプラ計測を行う場合は、ドプラ処理部19は後述するサンプルゲートが設定された位置
に対してドプラ送受信を行い、周波数遷移によって抽出された移動速度に基づいてパルス
ドプラ信号を生成する。パルスドプラ信号とは、サンプルゲートが設定された位置におけ
る、移動速度の変化を時系列に沿って並べた信号である。ドプラ処理部19はパルスドプ
ラ信号を生成すると、これをドプラ波形処理部16へと出力する。
【0022】
超音波画像生成部15は、Bモード処理部18あるいはドプラ処理部19から出力され
たBモード信号やカラードプラ信号に基づいて、超音波画像を生成する。例えば超音波画
像生成部15がBモードの超音波画像を生成する場合には、超音波画像生成部15はBモ
ード信号により定まる画素値を超音波の送受信方向に対応した2次元平面にマッピングし
てBモード画像を生成する。また例えば超音波画像生成部15がカラードプラモードの超
音波画像を生成する場合には、超音波画像生成部15はカラードプラ信号により定まる色
相を2次元平面にマッピングしてカラードプラ画像を生成する。あるいは、超音波プロー
ブ30が3次元空間のスキャンを行った場合には、超音波画像生成部15はBモード信号
やカラードプラ信号から定まる画素値を3次元空間にマッピングしたボリュームデータを
生成する。そして、超音波画像生成部15はボリュームデータを任意の視点から投影した
投影画像や、あるいはボリュームデータの任意の断面における画素値を2次元平面にマッ
ピングした断層画像を生成する。超音波画像生成部15はBモード画像、カラードプラ画
像、投影画像、断層画像などを生成すると、これを表示部23へと出力する。
【0023】
ドプラ波形処理部16は、ドプラ処理部19から出力されたパルスドプラ信号に基づい
てドプラ波形を生成する。ドプラ波形とはサンプルゲートが設定された被検体の特定の位
置における、周波数偏移(もしくは物体の移動速度)の時間的な変化をプロットした波形
である。ドプラ波形処理部16は、例えば移動速度が正の方向(プローブに対して近づく
方向)に速い場合には波形の高さが高く、移動速度が負の方向(プローブに対して離れる
方向)に早い場合には波形の高さが低くなるようにドプラ波形を生成する。ドプラ波形処
理部16はドプラ波形を生成すると、これを表示部23へと出力する。
【0024】
位置情報検出部13は、プローブ位置センサ32が出力した位置情報、サンプルゲート
の位置情報、及び被検体位置センサ42が出力した位置情報とに基づいて、サンプルゲー
トと、被検体との相対的な位置関係(以下、単に相対的位置情報と記載する)を算出する
。
【0025】
位置情報比較部14は、位置情報検出部13が出力した相対的位置情報に基づいて、ド
プラ計測を開始した時点の相対的位置(以下、単に初期位置と記載する)と現在の相対的
位置(以下、単に現在位置と記載する)とを比較する。また位置情報比較部14は、初期
位置と現在位置との差の大きさを評価して、初期位置と現在位置の差によって生じるドプ
ラ計測の誤差がサンプルゲート位置の変更によって補正し得る範囲にあるか否かを判断す
る。位置情報比較部14は、初期位置と現在位置との差が後述する記憶部12に記録され
た閾値を超えるか否かを判定することにより、この差が補正し得る範囲にあるか否かを判
断する。
【0026】
入力部21は、例えば機械的なボタン、ダイヤル、トラックボール、ジョイスティック
、スライダやホイールなどの種々の操作デバイスを用いて構成され、オペレータの入力操
作を受け付けて、入力操作を電気信号に変換してシステム制御部10へ出力する部材であ
る。入力部21は受け付けた入力操作に応じて、例えば送受信部17にスキャンの開始・
停止を指示する指示信号を出力する。あるいはスキャンを行うモードをBモード、カラー
ドプラモード、あるいはパルスドプラモードのうちいずれかから選択する指示信号を出力
する。あるいはBモード画像上に表示されたサンプルゲートの位置を移動させて、パルス
ドプラモードにおけるドプラ波形の計測位置を変更する指示信号を出力する。
【0027】
表示部23は、例えばLCD(Lucid Crystal Display)ディス
プレイや有機EL(Electro luminescence)ディスプレイ、あるい
はブラウン管ディスプレイなどの任意のディスプレイにより構成される。表示部23は、
超音波画像生成部15が生成したBモード画像、パルスドプラ画像を表示する。あるいは
ドプラ波形処理部16が生成したドプラ波形を表示する。
【0028】
ECG(Electro Cardio Graph:心電波形)検出部24は、被検
体に取り付けられ、被検体から発せられる電気信号を検出して制御部10へ出力する部材
である。ECG検出部24は被検体に取り付けた電極から心拍に同期して発せられる電気
信号を検出して、ECG波形として制御部10へ出力する。ドプラ処理部19は、ECG
検出部24から出力される電気信号に基づいて被検体の心時相を検出して、ドプラ波形の
生成や計測処理を行う。なお、本実施形態においては生体信号を検出する構成の例として
ECG検出部24を用いるが、超音波診断装置1の構成はこれに限られるものではない。
例えば生体信号検出ユニット40は心音計によって構成され、被検体に取り付けた小型の
スピーカから心拍に同期して発せられる心音信号を検出して、PCG(心音波形)として
制御部10へ出力するものであっても構わない。なお、ドプラ処理部19がドプラ信号の
変化に基づいて心時相を検出する場合には、ECG検出部24を省略して超音波診断装置
1を構成しても構わない。
【0029】
記憶部12は、例えばROM(Read Only Memory)、RAM(Ran
dom Access Memory)やフラッシュメモリ、及びHDD(Hard D
isk Drive)などから構成される記憶媒体である。記憶部12は超音波画像生成
部15が生成するBモード画像、カラードプラ画像や、ドプラ波形処理部16が生成した
ドプラ波形が記憶される。また記憶部12には、ドプラ計測を開始した時点における相対
的位置情報と、現在の相対的位置情報が補正可能な範囲にあるか否かの判定に用いる補正
可能範囲の情報が記憶される。また記憶部12には、後述する相対的位置情報に基づいて
サンプルゲートの位置を補正する動作を行うためのプログラムを記憶する。
【0030】
(サンプルゲート位置の補正)
先に述べた各構成要素に基づいて、超音波診断装置1はドプラ波形を用いた診断を行う
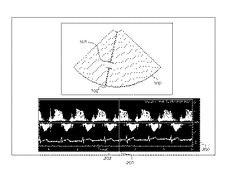
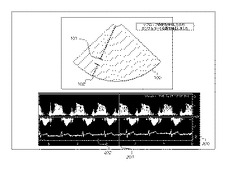
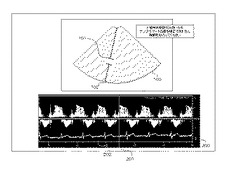
。図2はドプラ計測を行って取得したドプラ波形を表示する際の、表示部23における画
面表示の例である。図2に示すようにドプラ波形200は、例えばBモード画像100と
並べて表示される。Bモード画像100には、ドプラ波形200を計測する計測部位を指
定するためのサンプルゲート101が重畳されて表示される。例えばサンプルゲート10
1は、計測部位がどの走査線上に位置しているかを示す点線102と、点線102上のど
の深さに計測部位があるかを示す短い直線の組によって表示される。操作者は入力部21
を用いてサンプルゲート101をBモード画像100中で移動させ、計測部位の位置を調
節する。
【0031】
ドプラ波形200は先述したように、ドプラ周波数偏移から算出した物体の移動速度を
縦軸にとり、時間経過を横軸にとったグラフとして表示される。ドプラ波形200中には
現在の時相を示す直線201が重畳表示される。またECG検出部24がECG波形20
2を計測している場合には、ドプラ波形200と時間軸を合わせたECG波形202が並
べて表示される。操作者はドプラ波形200とECG波形202とを比較することにより
、心時相とドプラ波形200の相関に基づいた診断を行うことができる。
【0032】
ところで、操作者はドプラ波形200の計測を行っている間、サンプルゲート101に
より設定した計測部位と被検体内の組織との位置関係が変化しないように留意する必要が
ある。計測部位と被検体内の組織とがずれた場合には、ドプラ波形200が本来想定しな
い位置にある被検体組織から取得されていることとなり、臨床的に有用なデータとならな
いためである。また計測部位が同一組織内に収まっていたとしても、本来測定を行うべき
位置から計測部位がずれてしまったことにより、取得されるドプラ波形200に誤差を生
じる可能性がある。例えば被検体の血管の中心部を計測部位として設定してドプラ波形2
00を取得していたとしても、血管の端部へ計測部位がずれてしまうと、血管の中心部に
比べ端部の血流速度は遅いために本来よりも遅い速度でドプラ波形200が取得されてし
まうこととなる。
【0033】
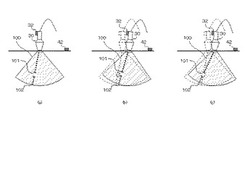
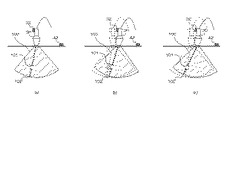
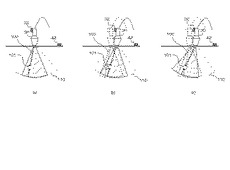
図3は、計測部位と被検体Pの組織との位置関係が変化した場合を示す模式図である。
図3(a)はサンプルゲート101を設定し被検体Pのある組織を計測部位として定めた
初期状態を示す。計測部位と被検体内の組織とがずれる事態の例として、例えば次の2通
りが考えられる。1つは操作者により超音波プローブ30が移動してしまった場合、そし
てもう1つは被検体Pの体動により被検体の組織が移動してしまった場合である。図3(
b)は超音波プローブ30が移動した場合を示す。超音波プローブ30が被検体Pの頭側
に移動したことにより、計測部位は図3(a)に示す初期状態に比べて被検体Pの頭側に
移動してしまうこととなる。一方図3(c)は被検体Pが移動した場合を示す。被検体P
が超音波プローブ30に対して足側に移動したことにより、計測部位は図3(a)に示す
初期状態に比べて被検体Pの足側に移動してしまうこととなる。
【0034】
実施形態の超音波診断装置1においてはこうした計測部位と被検体内の組織との位置の
ずれに伴う計測誤差を防ぐため、位置情報比較部14はプローブ位置センサ32と被検体
位置センサ42を用いて計測部位と被検体内の組織との位置ずれを検出する。そして検出
された位置ずれに基づいて、位置情報比較部14はサンプルゲート101の位置を補正し
、ドプラ計測を開始した際の被検体Pの組織と対応する位置へサンプルゲート101を移
動させる。この動作により、計測部位は被検体内の組織の位置に追従するため、位置のず
れに伴う計測誤差を防ぐことができる。
【0035】
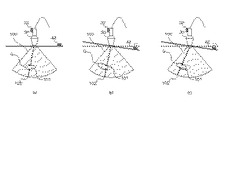
図4は超音波プローブ30が移動した際の、サンプルゲート101の位置補正の流れを
示す図である。図4(a)はサンプルゲート101を設定し被検体Pのある組織を計測部
位として定めた初期状態を示す。超音波プローブ30が図上で右方向に移動したとすると
、図4(b)に示すようにサンプルゲート101の位置も同様に、初期状態に比べて右方
向に移動する。位置情報比較部14は、プローブ位置センサ32が定期的に出力する超音
波プローブ30の位置情報と、被検体位置センサ42が定期的に出力する被検体Pの位置
情報とを比較した相対的位置情報を監視し、初期状態における相対的位置情報に比べて超
音波プローブ30あるいは被検体Pがどの方向にどれだけの距離移動したかを検出する。
位置情報比較部14は相対的位置情報が変化したことを検出すると、サンプルゲート10
1の位置を変化させるための制御信号を送受信部17へと出力する。例えば図4(b)に
おいてはサンプルゲート101が図上で右方向にずれているため、位置情報比較部14は
サンプルゲート101を図上で左方向に移動させる制御信号を送受信部17へと出力する
。送受信部17は図4(c)に示されるようにサンプルゲート101を図上で左方向に移
動させることにより、初期状態における被検体Pの組織と対応する組織上にサンプルゲー
ト101を追従させる。この動作により、超音波プローブ30の位置が移動した場合であ
ってもドプラ波形200は被検体Pの対応する組織上で計測し続けることができる。
【0036】
図5は被検体Pが移動した際の、サンプルゲート101の位置補正の流れを示す図であ
る。図5(a)はサンプルゲート101を設定し被検体Pのある組織Qを計測部位として
定めた初期状態を示す。被検体Pが図上で右斜め方向に傾いたとすると、図5(b)に示
すように、組織Qは超音波プローブ30に対して相対的に図上では左上方向に移動する。
位置情報比較部14は、初期状態に置ける相対的位置情報と、図5(b)の時点における
相対的位置情報とを比較し、サンプルゲート101の位置を変化させるための制御信号を
送受信部17へと出力する。図5(b)においては組織Qが図上で左上方向に移動してい
るため、位置情報比較部14はサンプルゲート101を図上で左上方向に移動させる制御
信号を送受信部17へと出力する。送受信部17は図5(c)に表示されるようにサンプ
ルゲート101を図上で左上方向に移動させることにより、初期状態における被検体Pの
組織と対応する組織上にサンプルゲート101を追従させる。この動作により、被検体P
が移動した場合であってもドプラ波形200は組織Qに対する計測を続けることができる
。
【0037】
(サンプルゲート位置の補正処理の流れ)
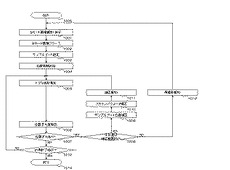
図6は、超音波診断装置1がドプラ波形200を取得する際に、サンプルゲート101
位置を補正する処理を行う際の、一連の処理の流れを示したフローチャートである。以下
、図6に沿って処理の流れについて述べる。
【0038】
まず、操作者が処理を開始する(ステップ1000)と、操作者は超音波プローブ30
を被検体Pに当接させ、送受信部17を用いてBモード信号の取得を行う。超音波画像生
成部15はBモード信号を用いてBモード画像100を生成し、これを表示部23へ出力
する(ステップ1001)。操作者は超音波プローブ30を被検体P上で動かしながらB
モード画像100を確認し、ドプラ波形200の計測を行うべき組織QをBモード画像1
00上で確認すると、超音波プローブ30の移動を停止させる。操作者は送受信部17に
よる超音波の送受信及び表示部23に表示されるBモード画像100の更新を停止させ、
Bモード画像100をフリーズ表示する(ステップ1002)。Bモード画像100をフ
リーズ表示すると、操作者は入力部21を用いてBモード画像100中にサンプルゲート
101を表示させ、組織Q上に計測部位が来るようにサンプルゲート101を設定する(
ステップ1003)。サンプルゲート101の位置が設定されると、位置情報比較部14
はサンプルゲート101が設定された時点を初期状態として、超音波プローブ30の位置
と被検体Pの位置とに基づく相対的位置情報を記憶部12に記録する(ステップ1004
)。位置情報比較部14が初期状態に置ける相対的位置情報を記憶部12に記録すると、
送受信部17は設定されたサンプルゲート101の位置におけるパルスドプラ計測を行う
。ドプラ波形処理部16はパルスドプラ信号に基づいてドプラ波形を生成し、これを表示
部23に表示する(ステップ1005)。送受信部17がパルスドプラ計測を行い一定時
間が経過すると、位置情報比較部14は現時点における超音波プローブ30の位置と被検
体Pの位置とに基づく相対的位置情報を算出する(ステップ1006)。位置情報比較部
14は現時点の相対的位置情報を算出すると、これが記憶部12に記録された初期状態に
おける相対的位置情報に比べて変化しているか否かを判断する(ステップ1007)。位
置情報比較部14は相対的位置情報が変化したと判断すると(ステップ1007のYes
)、相対的位置情報の変化が記憶部12に記録された補正可能範囲を超えているか否かを
判断して、位置ずれがサンプルゲート101位置の移動により補正可能か否かを判断する
(ステップ1008)。
【0039】
サンプルゲート101位置の移動による補正が不可能と判断される位置としては、例え
ば以下の3つが挙げられる。1つ目は、超音波プローブ30のスキャン範囲外へ組織Qが
移動してしまった場合である。例えば超音波プローブ30がスキャン範囲に対して煽る方
向へ回転した場合などは、スキャン範囲外へ組織Qが移動してしまうこととなる。2つ目
は、超音波プローブ30の中心軸と組織Qとのなす角度が大きくなるような位置へ組織Q
が移動したために、ドプラ補正による補正角度が大きくなり臨床的に有用な値が得られな
い場合である。そして3つ目は、超音波プローブ30の中心軸直下に組織Qが位置し、且
つ組織Q内の血流などの物体の動きが中心軸に対して直交方向に移動するときに、パルス
ドプラが検出する移動方向が実際の組織Qの移動を反映しない場合である。位置情報比較
部14が現時点における相対的位置情報が先のいずれの場合にも該当しないために、相対
的位置情報がサンプルゲート101位置の移動により補正可能な位置範囲にあると判断す
る(ステップ1008)と、位置情報比較部14はサンプルゲート101を移動後の組織
Qに一致させるための制御信号を送受信部17へと出力し、サンプルゲート101位置を
移動させる(ステップ1009)。位置情報比較部14はサンプルゲート101位置を移
動させると、移動後の位置に合わせてスキャンパラメータを補正する(ステップ1010
)。補正するスキャンパラメータは具体的には、連続波ドプラ信号における速度情報を算
出する際の角度補正パラメータ、超音波の送受信を行う被検体内の深さを規定するデプス
パラメータ、あるいは超音波振動子31から放射される超音波の収束位置を規定するフォ
ーカス位置などである。例えば超音波プローブ30の中心軸とサンプルゲート101との
なす角度が変化した場合は、変化した角度に連動して角度補正パラメータが変更される。
また超音波プローブ30が組織Qに対して上下動した場合などでサンプルゲート101の
深さが変化した場合などは、変化した深さに連動してデプスパラメータやフォーカス位置
などが変更される。これらのパラメータが変化したことを表示するために、変化したパラ
メータを表示部23上で点滅させて表示したり、あるいは変化前のパラメータと並べて表
示しても構わない。位置情報比較部14はスキャンパラメータを補正すると、サンプルゲ
ート101の位置及びスキャンパラメータを補正したことを表示部23に表示する(ステ
ップ1011)。図7はステップ1011における補正表示の例である。図7に示すよう
に、表示部23にサンプルゲート101の位置を補正したことを表示すると共に、移動し
たものが超音波プローブ30であるか被検体Pであるかを表示しても構わない。ステップ
1011の処理が終了すると、ステップ1005に戻り送受信部17は補正されたサンプ
ルゲート101の位置におけるパルスドプラ計測を行う(ステップ1005)。なお、パ
ルスドプラ計測を再開する際に、送受信部17及び超音波画像生成部15がBモード画像
100の再撮影を行って、表示部23に表示されたBモード画像100を更新する動作を
行っても構わない。Bモード画像100を更新することにより、操作者は超音波プローブ
30あるいは被検体Pの移動後、被検体のどの位置でパルスドプラ計測を行っているかを
視認することができる。
【0040】
一方ステップ1008において位置情報比較部14が、現時点の相対的位置情報が補正
可能範囲を超えていると判断すると(ステップ1008のNo)、位置情報比較部14は
サンプルゲート101位置の補正が行えないため、Bモード画像100の撮影及びサンプ
ルゲート101の設定のやり直しを促す内容のメッセージを表示部23に表示する(ステ
ップ1012)。図8はステップ1012における再撮影メッセージ表示の例である。図
8に示すように、表示部23に再撮影を促すメッセージを表示すると共に、移動したもの
が超音波プローブ30であるか被検体Pであるかを表示しても構わない。ステップ101
2の処理が終了すると、ステップ1001に戻り送受信部17はBモード信号の取得を行
う(ステップ1001)。
【0041】
ステップ1007において位置情報比較部14が、相対的位置情報の変化がないと判断
すると(ステップ1007のNo)、入力部21は計測終了の指示がなされたか否かを判
断する(ステップ1013)。入力部21が計測終了の指示がなされていないと判断する
と(ステップ1013のNo)、ステップ1005に戻り送受信部17は設定されたサン
プルゲート101の位置におけるパルスドプラ計測を行う(ステップ1005)。一方入
力部21が計測終了の指示がなされたと判断すると(ステップ1013のYes)、送受
信部17はパルスドプラ計測を停止してすると共に、表示部23に表示されるドプラ波形
200の更新を停止してフリーズ表示して、パルスドプラ計測を終了する(ステップ10
14)。
【0042】
以上の処理により、超音波診断装置1はパルスドプラ計測及びサンプルゲート101位
置の補正を行う。位置情報比較部14が検出した相対的位置情報の変化に基づいてサンプ
ルゲート101位置を補正することにより、ドプラ波形200を取得すべき組織Qの移動
にサンプルゲート101を追従させることができる。これにより、超音波プローブ30あ
るいは被検体Pの移動によって生じる計測誤差の発生を防ぐことができる。
【0043】
また、超音波診断装置1はサンプルゲート101位置の補正に連動してスキャンパラメ
ータの補正を行う。これにより、移動後のサンプルゲート101の位置に最適なスキャン
パラメータを用いてパルスドプラ計測を行うことができ、超音波プローブ30あるいは被
検体Pの移動によって生じる計測誤差の発生を防ぐことができる。
【0044】
また、超音波診断装置1は記憶部12に記憶された補正可能範囲の情報を用いて、現時
点の超音波プローブ30あるいは被検体Pの位置がサンプルゲート101位置の移動によ
り補正可能な範囲にあるか否かの判断を行う。補正可能な範囲にない場合は表示部23を
用いて再撮影の必要があることを報知することにより、操作者に素早く再撮影を促すこと
ができる。
【0045】
なお、本実施形態における超音波診断装置1の構成はこれに限定されず、適宣構成や動
作を省略し、あるいは追加しても構わない。例えば図4や図5において超音波プローブ3
0あるいは被検体Pが移動した場合にサンプルゲート101位置を移動させる動作を述べ
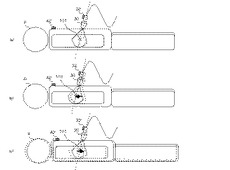
たが、サンプルゲート101と併せてスキャン範囲を移動させても構わない。図9はサン
プルゲート101と併せてBモード画像100の撮像範囲を移動する動作を示す図である
。符号110はBモード画像100が撮像可能なスキャン範囲110を示す。図9(a)
はサンプルゲート101及びBモード画像100の撮像範囲を設定した初期状態を示す。
超音波プローブ30が図上で右方向に移動したとすると、図9(b)に示すようにサンプ
ルゲート101とBモード画像100の撮像範囲が右方向に移動する。位置情報比較部1
4は、相対的位置情報の変化を検出すると、サンプルゲート101に加えてBモード画像
100の撮像範囲を変化させるための制御信号を送受信部17へと出力する。例えば図9
(b)においては、位置情報比較部14はBモード画像100の撮像範囲を、スキャン範
囲110の範囲内で左方向に移動させる制御信号を送受信部17へと出力する。送受信部
17は図9(c)に示されるようにサンプルゲート101及びBモード画像100の撮像
範囲を図上で左方向に追従させる。サンプルゲート101の移動と共にBモード画像10
0の再撮影を更新された撮像範囲を用いて行うことにより、操作者は超音波プローブ30
あるいは被検体Pの移動後にどのような位置関係でパルスドプラ計測が行われているかを
容易に視認することができる。
【0046】
また、図4や図5においてパルスドプラ計測のサンプルゲート101の位置を補正する
動作について述べたが、パルスドプラ計測に替えて連続波ドプラ計測や、Mモード画像を
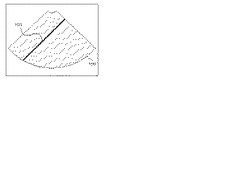
撮影する際のROIに対して本実施形態の位置補正を適用しても構わない。図10にMモ
ード画像を撮影する際に設定するROI103を示す。Mモード画像は、被検体内のある
直線上におけるエコー強度の変化を時系列に並べた画像である。Mモード画像の撮像範囲
を設定するROI103は、図10に示すようにBモード画像100上に直線を配置する
ことにより設定される。位置情報比較部14が相対的位置情報に基づいて超音波プローブ
30あるいは被検体Pの移動を検出し、該移動に基づいてROI103の位置を補正する
ことにより、被検体Pの移動前の組織と対応する組織上でMモード画像の撮像を続けるこ
とができる。
【0047】
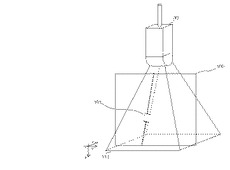
また、超音波振動子31は2次元平面をスキャン範囲とする場合について述べたが、先
述したメカ4Dプローブあるいは2Dアレイプローブによって超音波振動子31を構成し
、3次元空間をスキャンする構成において本実施形態の位置補正を適用しても構わない。
図11及び図12は2Dアレイプローブによって超音波振動子31を構成した場合の、サ
ンプルゲート101位置の補正について示す図である。図11及び図12において符号1
11は3次元のスキャン範囲を示し、符号100はサンプルゲート101を配置する際に
用いるBモード画像100の撮像範囲を示す。例えば図11のように3次元のスキャン範
囲111中にサンプルゲート101が配置された状態で、超音波プローブ30が図上の奥
方向(図11中の+x方向)に移動したとする。位置情報比較部14は相対的位置情報を
比較することにより超音波プローブ30の該移動を検出し、サンプルゲート101及びB
モード画像100の撮像範囲を移動させる。図12に移動後のサンプルゲート101及び
Bモード画像100の撮像範囲の位置を示す。3次元のスキャン範囲111内でサンプル
ゲート101及びBモード画像100の撮像範囲を移動させることにより、Bモード画像
100の撮像範囲に対して手前方向や奥方向(図12中のx方向)に超音波プローブ30
あるいは被検体Pが移動した場合であっても、移動に追従してパルスドプラ計測を行うこ
とができる。
【0048】
以上に本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示
したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は
、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、
種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の
範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含
まれる。
【符号の説明】
【0049】
P 被検体
Q 組織
1 超音波診断装置
10 システム制御部
12 記憶部
13 位置情報検出部
14 位置情報比較部
15 超音波画像生成部
16 ドプラ波形処理部
17 送受信部
18 Bモード処理部
21 入力部
23 表示部
24 ECG検出部
30 超音波プローブ
31 超音波振動子
32 プローブ位置センサ
41 基準磁場発生器
42 被検体位置センサ
【技術分野】
【0001】
本開示は、超音波画像を用いて診断を行う超音波診断装置、及び超音波診断装置の制御
プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに内蔵された超音波振動子から超音波を被験体に対
して送信し、被検体内で生じた超音波(以下、単にエコー信号と記載する)を超音波振動
子で受信して、エコー信号に基づく超音波画像を生成する装置である。
【0003】
近年、被検体の任意の位置における血流速度を計測する方法として、ドプラスペクトラ
ム法が普及している。このドプラスペクトラム法では、被検体の同一部位に対して一定間
隔で複数回の超音波送受波を行い、血球などの移動反射体において反射した超音波からド
プラ信号を検出する。そして、このドプラ信号にスペクトル解析を施すことにより、ドプ
ラ波形(ドプラスペクトラムの時間変化をグラフ化した画像データ)を生成する。このド
プラ波形の時間変化から、例えば任意の位置の血流速度の最大流速や平均流速といった血
流に関する情報を計測することができる(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−240198号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
先述したような超音波診断装置を用いてドプラスペクトラム法を用いた計測を行う場合
の、手技の流れについて述べる。まず操作者は被検体の計測部位へ向けて超音波を送受信
する超音波プローブを当接させる。超音波診断装置はBモード送受信を行い、計測部位周
辺のBモード画像を取得し表示する。操作者は超音波のスキャン範囲中に正しく計測部位
が含まれていることをBモード画像により確認すると、Bモード送受信を停止してBモード
画像の更新を停止させたフリーズ表示に切り替える。更に操作者はフリーズ表示したBモ
ード画像中にサンプルゲートと呼ばれるマーカを配置し、ドプラスペクトラムを計測する
部位を指定する。例えばサンプルゲートは、図2に示されるようなパルスドプラ計測の方
向を示す長い直線と、計測部位を指定する短い直線の組によって示される。
【0006】
操作者がBモード画像中にサンプルゲートを指定すると、超音波診断装置はサンプルゲ
ートによって指定された計測部位に向けてドプラ送受信を行い、計測部位から反射された
ドプラ信号を収集する。超音波診断装置は収集されたドプラ信号にスペクトル解析を施し
てドプラ波形を生成し、Bモード画像と並べてドプラ波形を表示する。操作者は表示され
たドプラ波形が所望の値になっていることを確認すると、ドプラ送受信を停止させてドプ
ラ波形の更新を停止されたフリーズ表示に切り替える。更に操作者はフリーズ表示したド
プラ波形に対し、計測値取得用のマーカを配置する。超音波診断装置は配置されたマーカ
の位置に基づいて、例えば流速の最大値と最小値の比率などの指標値を計測し表示する。
操作者は表示した指標値に基づいて、計測部位に関連する疾患の有無などを判断すること
ができる。
【0007】
以上の一連の手技において、操作者は超音波プローブを被検体に対して固定した状態で
Bモード画像をフリーズ表示した以降の操作を行わなければならない。超音波プローブあ
るいは被検体が移動してしまった場合にはサンプルゲートによって設定した計測部位と計
測を行う部位との位置関係がずれてしまい、所望の部位からのドプラ信号が得られないた
めである。しかし、操作者が超音波診断装置を操作する際に生じる体の動きや、被検体自
身の呼吸などが原因で生じる体動により、超音波プローブと被検体との位置関係を固定し
続けるのは難しく、また位置関係がずれてしまった場合であっても、画面上に表示される
フリーズ表示したBモード画像とサンプルゲートからでは操作者がずれを検知できないと
いう課題があった。
【0008】
そこで本願においては、ドプラ波形などの超音波画像を取得する手技をより簡便に行う
ことを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため実施形態の超音波診断装置においては、スキャン領域を設定す
る入力手段と、前記設定されたスキャン領域へ超音波を送信し、その反射波を受信するこ
とによりエコー信号を得る超音波プローブと、前記エコー信号に基づいて超音波画像を生
成する超音波画像取得手段と、前記超音波プローブの位置に基づいて定まるプローブ位置
情報を検出する位置情報検出手段と、所定の時刻における前記プローブ位置情報を、基準
位置情報として記憶する記憶手段と、前記位置情報検出手段が検出したプローブ位置情報
と、前記基準位置情報とに基づいて、前記スキャン領域の位置を変更するスキャン領域制
御手段と、前記スキャン位置及び前記超音波画像を表示する表示手段とを有する。
【0010】
また、上記課題を解決するための実施形態の超音波診断装置の制御プログラムにおいて
は、コンピュータに、スキャン領域を設定する入力機能と、超音波プローブを用いて前記
設定されたスキャン領域へ超音波を送信し、その反射波を受信することによりエコー信号
を得る送受信機能と、前記エコー信号に基づいて超音波画像を生成する超音波画像取得機
能と、前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報
検出機能と、所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する
記憶機能と、前記位置情報検出機能が検出したプローブ位置情報と、前記基準位置情報と
に基づいて、前記スキャン領域の位置を変更するスキャン領域制御機能と、前記スキャン
位置及び前記超音波画像を表示する表示機能とを機能させる。
【図面の簡単な説明】
【0011】
【図1】実施形態に係る超音波診断装置の内部構成を示すブロック図。
【図2】実施形態に係る、サンプルゲートにより指定した計測位置のドプラ波形を示す図。
【図3】実施形態に係る、Mモード画像の取得位置をマーカ指定を示す図。
【図4】実施形態に係る、超音波プローブの移動あるいは被検体の体動によりスキャン面がずれる様子を示す図。
【図5】実施形態に係る、超音波プローブの移動によってずれたサンプルゲート位置を補正する動作を示す図。
【図6】実施形態に係る、被検体の体動によってずれたサンプルゲート位置を補正する動作を示す図。
【図7】実施形態に係る、サンプルゲート位置を補正する際の画面表示を示す図。
【図8】実施形態に係る、再撮影指示の画面表示を示す図。
【図9】実施形態に係る、サンプルゲート位置の補正処理を示すフローチャート。
【図10】実施形態に係る、サンプルゲート位置と撮像範囲とを補正する動作を示す図。
【図11】実施形態に係る、2Dアレイ型の超音波プローブにおいてサンプルゲートによりドプラ計測位置を指定する動作を示す図。
【図12】実施形態に係る、2Dアレイ型の超音波プローブにおいてサンプルゲート位置と撮像範囲とを補正する動作を示す図。
【発明を実施するための形態】
【0012】
以下、本開示の実施形態について図面を参照して説明する。図1は、各実施形態に係る
超音波診断装置1の構成を示したブロック図である。超音波診断装置1は、システム制御
部10、入力部21、表示部23、ECG検出部24、超音波プローブ30、及び基準磁場
発生器41、被検体位置センサ42をそれぞれ組み合わせることにより構成される。なお
、本発明における超音波診断装置1の構成はこれに限られるものではなく、適宣構成要素
を追加しても構わないし、超音波診断装置1の構成要素の幾つかを省略して、超音波診断
装置1の外部に接続した装置が省略された構成要素の役割を果たすものであっても構わな
い。また例えば超音波プローブ30や超音波画像生成部15、ドプラ波形処理部16、送
受信部17、Bモード処理部18、及びドプラ処理部19といった超音波画像の生成に用
いる構成要素を超音波診断装置1の外部に接続した超音波画像取得装置に行わせる構成と
しても構わない。あるいは本実施形態に述べる位置情報の対応付け機能を実行するための
プログラムを任意のコンピュータにインストールして実行することで、コンピュータを実
質的に超音波診断装置1として動作させるものであっても構わない。なお、本実施形態に
おいては後述するドプラ波形、Bモード画像、カラードプラ画像、投影画像、断層画像、
及びMモード画像などの、超音波診断装置1に表示される臨床画像を総称して超音波画像
と記載する。
【0013】
超音波プローブ30はシステム制御部10に接続される。超音波プローブ30は超音波
振動子31を内蔵し、送受信部17から出力された駆動信号に基づいて超音波振動子31
を駆動する。また、超音波プローブ30はプローブプローブ位置センサ32を内蔵し、プ
ローブ位置センサ32は後述する基準磁場発生器41から出力される基準磁場に基づいて
超音波プローブ30の位置情報を検出し、位置情報検出部13へと出力する。
【0014】
超音波振動子31は、送受信部17を介して入力された駆動信号に基づいて超音波を発
生し、また被検体から反射された超音波を受信して電気信号へ変換する。超音波振動子3
1は超音波を受信することにより生じた電気信号(以下、単にエコー信号と記載する)を
送受信部17へと出力する。また、本実施形態における超音波振動子31は、リニア形、
コンベックス形、セクタ形などの2次元平面をスキャンする種々の形状によって構成され
ていても構わないし、あるいはメカ4Dプローブ(機械式3次元プローブ)あるいは2D
アレイプローブ(マトリクスアレイプローブ)などの3次元空間をスキャンする種々の形
状により構成されるものであっても構わない。
【0015】
プローブ位置センサ32は超音波プローブ30に取り付けられ、超音波プローブ30の
位置情報を検出するセンサである。プローブ位置センサ32は例えば複数のコイルを3つ
のそれぞれ直交する平面上に配置し、各コイルに電流を検出する電流計を接続することに
より構成される。コイルは後述する基準磁場発生器41から発生する基準磁場が入力され
ると電磁誘導により電流を発し、電流計がこの電流値を検出する。プローブ位置センサ3
2は3つの平面に対応するコイルから出力された電流値の大きさを位置情報検出部13へ
と出力する。後述する位置情報検出部13はこの電流値の大きさや、電流値の変異を比較
することにより、基準磁場発生器41から発生した基準磁場中心に対するプローブ位置セ
ンサ32の相対的な位置を算出する。また、プローブ位置センサ32は異なる位置にある
コイルから出力された電流値の大きさを比較し、それぞれの基準磁場中心からの相対的な
位置を算出する。更に位置情報検出部13は異なる位置にあるコイルの位置を比較するこ
とにより、超音波プローブ30が基準磁場中心に対してどれだけ傾いているかを算出する
。以降の実施形態では、プローブ位置センサ32が検出した基準磁場中心に対する相対的
な位置に関する情報と、超音波プローブ30の傾きに関する情報とを総称して、単に超音
波プローブ30の位置情報と記載する。なお、本実施形態においてはプローブ位置センサ
32の構成例としてコイルを用いて磁場を検出するものを挙げたが、プローブ位置センサ
32の構成はこれに限られるものではない。例えばコイル以外にホール素子などの他の磁
気検出素子を用いてプローブ位置センサ32を構成しても構わない。あるいはプローブ位
置センサ32をジャイロセンサを用いて構成しても構わない。ジャイロセンサは、例えば
微小な金属板や金属棒からなる検出子を回転させ、回転によって検出子に加えられる力(
コリオリ力)を電気信号に変換して検出するセンサである。ジャイロセンサが傾くことに
よって、検出子に加えられるコリオリ力が変化するため、ジャイロセンサは該変化に基づ
いてプローブの傾き情報を検出する。
【0016】
被検体位置センサ42は被検体に取り付けられ、被検体の位置情報を検出するセンサで
ある。被検体位置センサ42は例えば被検体の肩など、被検体の体動を反映しやすい部位
に取り付けられ、被検体の基準磁場中心からの相対的な位置と、傾きに関する情報を位置
情報として位置情報検出部13へと出力する。被検体位置センサ42はプローブ位置セン
サ32と同様に例えば複数のコイルを組み合わせることによって構成されるが、ホール素
子、ジャイロセンサ、あるいは加速度センサなど任意の素子を用いて被検体位置センサ4
2を構成するものであっても構わない。また、検査中の被検体は例えば寝台に寝ていたり
、椅子に座っているなど、傾き方向に関しては安定した状態で検査を受けることがある。
このような場合には被検体位置センサ42のうち傾きを検出する構成を省略し、被検体の
位置情報のみを出力する構成としても構わない。またあるいは、被検体の動きが十分小さ
い場合には、被検体位置センサ42の構成自体を省略し、プローブ位置センサ32が検出
する超音波プローブ30の位置情報に基づいて後述する補正処理を行っても構わない。
【0017】
基準磁場発生器41は基準磁場を発生する装置である。基準磁場発生器41は例えばコ
イルをそれぞれ直交する平面上に配置し、各コイルに電気信号を供給する電流源を接続す
ることにより構成される。コイルは接続された電流源から電気信号が入力されると、その
中心から基準磁場を発生させる。基準磁場発生器41は例えば10msごとなどの等間隔
で、電気信号を供給するコイルを切り替えながら基準磁場を発生させる。これにより、基
準磁場発生器41が発生する基準磁場の方向が等間隔で切り替わることとなる。基準磁場
発生器41は基準磁場を発生させるとともに、現在どの方向に向いた基準磁場を発生させ
ているかを示す情報を位置情報検出部13へと出力する。なお、基準磁場発生器41の構
成はこれに限られるものではなく、基準磁場の方向を切り替える時間間隔は任意の時間間
隔であっても構わないし、あるいは任意の時間間隔で基準磁場の発生と遮断とを切り替え
る構成としても構わない。
【0018】
システム制御部10は、記憶部12、位置情報検出部13、位置情報比較部14、ドプ
ラ波形処理部16、送受信部17、Bモード処理部18、及びドプラ処理部19から構成
される。システム制御部10は各構成要素に制御命令を出力し、超音波診断装置1を統括
的に制御する。
【0019】
送受信部17は、超音波プローブ30が受信したエコー信号を処理するアンプ回路、A
/D変換器、加算器などを備える。アンプ回路は、超音波プローブ30が受信したエコー
信号を増幅し、A/D変換器へ出力する。A/D変換器は、増幅されたエコー信号の受信
指向性を決定するために必要な遅延時間をエコー信号に与え、加算器へと出力する。加算
器は遅延時間を与えられたエコー信号を加算することで、超音波を送信するスキャンライ
ンに対応したエコー信号を得る。送受信部17はスキャンラインに対応したエコー信号を
Bモード処理部18あるいはドプラ処理部19へと出力する。また送受信部17は、超音
波振動子31を駆動し超音波を送信するための駆動信号を超音波プローブ30へと出力す
る。
【0020】
Bモード処理部18は、送受信部17が出力したエコー信号の振幅強度に応じて、Bモ
ード画像における輝度値を定めたBモード信号を生成する。Bモード信号は、例えばBモ
ード画像における画素の座標と、その画素の輝度値とを組み合わせた信号として生成され
る。Bモード処理部18は生成したBモード信号を超音波画像生成部15へ出力する。
【0021】
ドプラ処理部19は、送受信部17が出力したエコー信号の周波数遷移を検出して、組
織や血流などスキャン領域中の移動体の移動速度を抽出したドプラ信号を生成する。ドプ
ラ処理部19は、送受信部17が行うドプラ計測の手法に応じて出力するドプラ信号の抽
出方法及び信号の出力先を切り替える。具体的には送受信部17は、カラードプラによる
ドプラ計測と、パルスドプラによるドプラ計測の2種類のドプラ計測を行う。カラードプ
ラによるドプラ計測を行う場合は、ドプラ処理部19はスキャン面全体に対してドプラ送
受信を行い、周波数遷移によって抽出された移動速度を色相に割り当てたカラードプラ信
号を生成する。カラードプラ信号は、例えばカラードプラ画像における画素の座標と、そ
の画素の色相とを組み合わせた信号として生成される。ドプラ処理部19はカラードプラ
信号を生成すると、これを超音波画像生成部15へと出力する。一方パルスドプラによる
ドプラ計測を行う場合は、ドプラ処理部19は後述するサンプルゲートが設定された位置
に対してドプラ送受信を行い、周波数遷移によって抽出された移動速度に基づいてパルス
ドプラ信号を生成する。パルスドプラ信号とは、サンプルゲートが設定された位置におけ
る、移動速度の変化を時系列に沿って並べた信号である。ドプラ処理部19はパルスドプ
ラ信号を生成すると、これをドプラ波形処理部16へと出力する。
【0022】
超音波画像生成部15は、Bモード処理部18あるいはドプラ処理部19から出力され
たBモード信号やカラードプラ信号に基づいて、超音波画像を生成する。例えば超音波画
像生成部15がBモードの超音波画像を生成する場合には、超音波画像生成部15はBモ
ード信号により定まる画素値を超音波の送受信方向に対応した2次元平面にマッピングし
てBモード画像を生成する。また例えば超音波画像生成部15がカラードプラモードの超
音波画像を生成する場合には、超音波画像生成部15はカラードプラ信号により定まる色
相を2次元平面にマッピングしてカラードプラ画像を生成する。あるいは、超音波プロー
ブ30が3次元空間のスキャンを行った場合には、超音波画像生成部15はBモード信号
やカラードプラ信号から定まる画素値を3次元空間にマッピングしたボリュームデータを
生成する。そして、超音波画像生成部15はボリュームデータを任意の視点から投影した
投影画像や、あるいはボリュームデータの任意の断面における画素値を2次元平面にマッ
ピングした断層画像を生成する。超音波画像生成部15はBモード画像、カラードプラ画
像、投影画像、断層画像などを生成すると、これを表示部23へと出力する。
【0023】
ドプラ波形処理部16は、ドプラ処理部19から出力されたパルスドプラ信号に基づい
てドプラ波形を生成する。ドプラ波形とはサンプルゲートが設定された被検体の特定の位
置における、周波数偏移(もしくは物体の移動速度)の時間的な変化をプロットした波形
である。ドプラ波形処理部16は、例えば移動速度が正の方向(プローブに対して近づく
方向)に速い場合には波形の高さが高く、移動速度が負の方向(プローブに対して離れる
方向)に早い場合には波形の高さが低くなるようにドプラ波形を生成する。ドプラ波形処
理部16はドプラ波形を生成すると、これを表示部23へと出力する。
【0024】
位置情報検出部13は、プローブ位置センサ32が出力した位置情報、サンプルゲート
の位置情報、及び被検体位置センサ42が出力した位置情報とに基づいて、サンプルゲー
トと、被検体との相対的な位置関係(以下、単に相対的位置情報と記載する)を算出する
。
【0025】
位置情報比較部14は、位置情報検出部13が出力した相対的位置情報に基づいて、ド
プラ計測を開始した時点の相対的位置(以下、単に初期位置と記載する)と現在の相対的
位置(以下、単に現在位置と記載する)とを比較する。また位置情報比較部14は、初期
位置と現在位置との差の大きさを評価して、初期位置と現在位置の差によって生じるドプ
ラ計測の誤差がサンプルゲート位置の変更によって補正し得る範囲にあるか否かを判断す
る。位置情報比較部14は、初期位置と現在位置との差が後述する記憶部12に記録され
た閾値を超えるか否かを判定することにより、この差が補正し得る範囲にあるか否かを判
断する。
【0026】
入力部21は、例えば機械的なボタン、ダイヤル、トラックボール、ジョイスティック
、スライダやホイールなどの種々の操作デバイスを用いて構成され、オペレータの入力操
作を受け付けて、入力操作を電気信号に変換してシステム制御部10へ出力する部材であ
る。入力部21は受け付けた入力操作に応じて、例えば送受信部17にスキャンの開始・
停止を指示する指示信号を出力する。あるいはスキャンを行うモードをBモード、カラー
ドプラモード、あるいはパルスドプラモードのうちいずれかから選択する指示信号を出力
する。あるいはBモード画像上に表示されたサンプルゲートの位置を移動させて、パルス
ドプラモードにおけるドプラ波形の計測位置を変更する指示信号を出力する。
【0027】
表示部23は、例えばLCD(Lucid Crystal Display)ディス
プレイや有機EL(Electro luminescence)ディスプレイ、あるい
はブラウン管ディスプレイなどの任意のディスプレイにより構成される。表示部23は、
超音波画像生成部15が生成したBモード画像、パルスドプラ画像を表示する。あるいは
ドプラ波形処理部16が生成したドプラ波形を表示する。
【0028】
ECG(Electro Cardio Graph:心電波形)検出部24は、被検
体に取り付けられ、被検体から発せられる電気信号を検出して制御部10へ出力する部材
である。ECG検出部24は被検体に取り付けた電極から心拍に同期して発せられる電気
信号を検出して、ECG波形として制御部10へ出力する。ドプラ処理部19は、ECG
検出部24から出力される電気信号に基づいて被検体の心時相を検出して、ドプラ波形の
生成や計測処理を行う。なお、本実施形態においては生体信号を検出する構成の例として
ECG検出部24を用いるが、超音波診断装置1の構成はこれに限られるものではない。
例えば生体信号検出ユニット40は心音計によって構成され、被検体に取り付けた小型の
スピーカから心拍に同期して発せられる心音信号を検出して、PCG(心音波形)として
制御部10へ出力するものであっても構わない。なお、ドプラ処理部19がドプラ信号の
変化に基づいて心時相を検出する場合には、ECG検出部24を省略して超音波診断装置
1を構成しても構わない。
【0029】
記憶部12は、例えばROM(Read Only Memory)、RAM(Ran
dom Access Memory)やフラッシュメモリ、及びHDD(Hard D
isk Drive)などから構成される記憶媒体である。記憶部12は超音波画像生成
部15が生成するBモード画像、カラードプラ画像や、ドプラ波形処理部16が生成した
ドプラ波形が記憶される。また記憶部12には、ドプラ計測を開始した時点における相対
的位置情報と、現在の相対的位置情報が補正可能な範囲にあるか否かの判定に用いる補正
可能範囲の情報が記憶される。また記憶部12には、後述する相対的位置情報に基づいて
サンプルゲートの位置を補正する動作を行うためのプログラムを記憶する。
【0030】
(サンプルゲート位置の補正)
先に述べた各構成要素に基づいて、超音波診断装置1はドプラ波形を用いた診断を行う
。図2はドプラ計測を行って取得したドプラ波形を表示する際の、表示部23における画
面表示の例である。図2に示すようにドプラ波形200は、例えばBモード画像100と
並べて表示される。Bモード画像100には、ドプラ波形200を計測する計測部位を指
定するためのサンプルゲート101が重畳されて表示される。例えばサンプルゲート10
1は、計測部位がどの走査線上に位置しているかを示す点線102と、点線102上のど
の深さに計測部位があるかを示す短い直線の組によって表示される。操作者は入力部21
を用いてサンプルゲート101をBモード画像100中で移動させ、計測部位の位置を調
節する。
【0031】
ドプラ波形200は先述したように、ドプラ周波数偏移から算出した物体の移動速度を
縦軸にとり、時間経過を横軸にとったグラフとして表示される。ドプラ波形200中には
現在の時相を示す直線201が重畳表示される。またECG検出部24がECG波形20
2を計測している場合には、ドプラ波形200と時間軸を合わせたECG波形202が並
べて表示される。操作者はドプラ波形200とECG波形202とを比較することにより
、心時相とドプラ波形200の相関に基づいた診断を行うことができる。
【0032】
ところで、操作者はドプラ波形200の計測を行っている間、サンプルゲート101に
より設定した計測部位と被検体内の組織との位置関係が変化しないように留意する必要が
ある。計測部位と被検体内の組織とがずれた場合には、ドプラ波形200が本来想定しな
い位置にある被検体組織から取得されていることとなり、臨床的に有用なデータとならな
いためである。また計測部位が同一組織内に収まっていたとしても、本来測定を行うべき
位置から計測部位がずれてしまったことにより、取得されるドプラ波形200に誤差を生
じる可能性がある。例えば被検体の血管の中心部を計測部位として設定してドプラ波形2
00を取得していたとしても、血管の端部へ計測部位がずれてしまうと、血管の中心部に
比べ端部の血流速度は遅いために本来よりも遅い速度でドプラ波形200が取得されてし
まうこととなる。
【0033】
図3は、計測部位と被検体Pの組織との位置関係が変化した場合を示す模式図である。
図3(a)はサンプルゲート101を設定し被検体Pのある組織を計測部位として定めた
初期状態を示す。計測部位と被検体内の組織とがずれる事態の例として、例えば次の2通
りが考えられる。1つは操作者により超音波プローブ30が移動してしまった場合、そし
てもう1つは被検体Pの体動により被検体の組織が移動してしまった場合である。図3(
b)は超音波プローブ30が移動した場合を示す。超音波プローブ30が被検体Pの頭側
に移動したことにより、計測部位は図3(a)に示す初期状態に比べて被検体Pの頭側に
移動してしまうこととなる。一方図3(c)は被検体Pが移動した場合を示す。被検体P
が超音波プローブ30に対して足側に移動したことにより、計測部位は図3(a)に示す
初期状態に比べて被検体Pの足側に移動してしまうこととなる。
【0034】
実施形態の超音波診断装置1においてはこうした計測部位と被検体内の組織との位置の
ずれに伴う計測誤差を防ぐため、位置情報比較部14はプローブ位置センサ32と被検体
位置センサ42を用いて計測部位と被検体内の組織との位置ずれを検出する。そして検出
された位置ずれに基づいて、位置情報比較部14はサンプルゲート101の位置を補正し
、ドプラ計測を開始した際の被検体Pの組織と対応する位置へサンプルゲート101を移
動させる。この動作により、計測部位は被検体内の組織の位置に追従するため、位置のず
れに伴う計測誤差を防ぐことができる。
【0035】
図4は超音波プローブ30が移動した際の、サンプルゲート101の位置補正の流れを
示す図である。図4(a)はサンプルゲート101を設定し被検体Pのある組織を計測部
位として定めた初期状態を示す。超音波プローブ30が図上で右方向に移動したとすると
、図4(b)に示すようにサンプルゲート101の位置も同様に、初期状態に比べて右方
向に移動する。位置情報比較部14は、プローブ位置センサ32が定期的に出力する超音
波プローブ30の位置情報と、被検体位置センサ42が定期的に出力する被検体Pの位置
情報とを比較した相対的位置情報を監視し、初期状態における相対的位置情報に比べて超
音波プローブ30あるいは被検体Pがどの方向にどれだけの距離移動したかを検出する。
位置情報比較部14は相対的位置情報が変化したことを検出すると、サンプルゲート10
1の位置を変化させるための制御信号を送受信部17へと出力する。例えば図4(b)に
おいてはサンプルゲート101が図上で右方向にずれているため、位置情報比較部14は
サンプルゲート101を図上で左方向に移動させる制御信号を送受信部17へと出力する
。送受信部17は図4(c)に示されるようにサンプルゲート101を図上で左方向に移
動させることにより、初期状態における被検体Pの組織と対応する組織上にサンプルゲー
ト101を追従させる。この動作により、超音波プローブ30の位置が移動した場合であ
ってもドプラ波形200は被検体Pの対応する組織上で計測し続けることができる。
【0036】
図5は被検体Pが移動した際の、サンプルゲート101の位置補正の流れを示す図であ
る。図5(a)はサンプルゲート101を設定し被検体Pのある組織Qを計測部位として
定めた初期状態を示す。被検体Pが図上で右斜め方向に傾いたとすると、図5(b)に示
すように、組織Qは超音波プローブ30に対して相対的に図上では左上方向に移動する。
位置情報比較部14は、初期状態に置ける相対的位置情報と、図5(b)の時点における
相対的位置情報とを比較し、サンプルゲート101の位置を変化させるための制御信号を
送受信部17へと出力する。図5(b)においては組織Qが図上で左上方向に移動してい
るため、位置情報比較部14はサンプルゲート101を図上で左上方向に移動させる制御
信号を送受信部17へと出力する。送受信部17は図5(c)に表示されるようにサンプ
ルゲート101を図上で左上方向に移動させることにより、初期状態における被検体Pの
組織と対応する組織上にサンプルゲート101を追従させる。この動作により、被検体P
が移動した場合であってもドプラ波形200は組織Qに対する計測を続けることができる
。
【0037】
(サンプルゲート位置の補正処理の流れ)
図6は、超音波診断装置1がドプラ波形200を取得する際に、サンプルゲート101
位置を補正する処理を行う際の、一連の処理の流れを示したフローチャートである。以下
、図6に沿って処理の流れについて述べる。
【0038】
まず、操作者が処理を開始する(ステップ1000)と、操作者は超音波プローブ30
を被検体Pに当接させ、送受信部17を用いてBモード信号の取得を行う。超音波画像生
成部15はBモード信号を用いてBモード画像100を生成し、これを表示部23へ出力
する(ステップ1001)。操作者は超音波プローブ30を被検体P上で動かしながらB
モード画像100を確認し、ドプラ波形200の計測を行うべき組織QをBモード画像1
00上で確認すると、超音波プローブ30の移動を停止させる。操作者は送受信部17に
よる超音波の送受信及び表示部23に表示されるBモード画像100の更新を停止させ、
Bモード画像100をフリーズ表示する(ステップ1002)。Bモード画像100をフ
リーズ表示すると、操作者は入力部21を用いてBモード画像100中にサンプルゲート
101を表示させ、組織Q上に計測部位が来るようにサンプルゲート101を設定する(
ステップ1003)。サンプルゲート101の位置が設定されると、位置情報比較部14
はサンプルゲート101が設定された時点を初期状態として、超音波プローブ30の位置
と被検体Pの位置とに基づく相対的位置情報を記憶部12に記録する(ステップ1004
)。位置情報比較部14が初期状態に置ける相対的位置情報を記憶部12に記録すると、
送受信部17は設定されたサンプルゲート101の位置におけるパルスドプラ計測を行う
。ドプラ波形処理部16はパルスドプラ信号に基づいてドプラ波形を生成し、これを表示
部23に表示する(ステップ1005)。送受信部17がパルスドプラ計測を行い一定時
間が経過すると、位置情報比較部14は現時点における超音波プローブ30の位置と被検
体Pの位置とに基づく相対的位置情報を算出する(ステップ1006)。位置情報比較部
14は現時点の相対的位置情報を算出すると、これが記憶部12に記録された初期状態に
おける相対的位置情報に比べて変化しているか否かを判断する(ステップ1007)。位
置情報比較部14は相対的位置情報が変化したと判断すると(ステップ1007のYes
)、相対的位置情報の変化が記憶部12に記録された補正可能範囲を超えているか否かを
判断して、位置ずれがサンプルゲート101位置の移動により補正可能か否かを判断する
(ステップ1008)。
【0039】
サンプルゲート101位置の移動による補正が不可能と判断される位置としては、例え
ば以下の3つが挙げられる。1つ目は、超音波プローブ30のスキャン範囲外へ組織Qが
移動してしまった場合である。例えば超音波プローブ30がスキャン範囲に対して煽る方
向へ回転した場合などは、スキャン範囲外へ組織Qが移動してしまうこととなる。2つ目
は、超音波プローブ30の中心軸と組織Qとのなす角度が大きくなるような位置へ組織Q
が移動したために、ドプラ補正による補正角度が大きくなり臨床的に有用な値が得られな
い場合である。そして3つ目は、超音波プローブ30の中心軸直下に組織Qが位置し、且
つ組織Q内の血流などの物体の動きが中心軸に対して直交方向に移動するときに、パルス
ドプラが検出する移動方向が実際の組織Qの移動を反映しない場合である。位置情報比較
部14が現時点における相対的位置情報が先のいずれの場合にも該当しないために、相対
的位置情報がサンプルゲート101位置の移動により補正可能な位置範囲にあると判断す
る(ステップ1008)と、位置情報比較部14はサンプルゲート101を移動後の組織
Qに一致させるための制御信号を送受信部17へと出力し、サンプルゲート101位置を
移動させる(ステップ1009)。位置情報比較部14はサンプルゲート101位置を移
動させると、移動後の位置に合わせてスキャンパラメータを補正する(ステップ1010
)。補正するスキャンパラメータは具体的には、連続波ドプラ信号における速度情報を算
出する際の角度補正パラメータ、超音波の送受信を行う被検体内の深さを規定するデプス
パラメータ、あるいは超音波振動子31から放射される超音波の収束位置を規定するフォ
ーカス位置などである。例えば超音波プローブ30の中心軸とサンプルゲート101との
なす角度が変化した場合は、変化した角度に連動して角度補正パラメータが変更される。
また超音波プローブ30が組織Qに対して上下動した場合などでサンプルゲート101の
深さが変化した場合などは、変化した深さに連動してデプスパラメータやフォーカス位置
などが変更される。これらのパラメータが変化したことを表示するために、変化したパラ
メータを表示部23上で点滅させて表示したり、あるいは変化前のパラメータと並べて表
示しても構わない。位置情報比較部14はスキャンパラメータを補正すると、サンプルゲ
ート101の位置及びスキャンパラメータを補正したことを表示部23に表示する(ステ
ップ1011)。図7はステップ1011における補正表示の例である。図7に示すよう
に、表示部23にサンプルゲート101の位置を補正したことを表示すると共に、移動し
たものが超音波プローブ30であるか被検体Pであるかを表示しても構わない。ステップ
1011の処理が終了すると、ステップ1005に戻り送受信部17は補正されたサンプ
ルゲート101の位置におけるパルスドプラ計測を行う(ステップ1005)。なお、パ
ルスドプラ計測を再開する際に、送受信部17及び超音波画像生成部15がBモード画像
100の再撮影を行って、表示部23に表示されたBモード画像100を更新する動作を
行っても構わない。Bモード画像100を更新することにより、操作者は超音波プローブ
30あるいは被検体Pの移動後、被検体のどの位置でパルスドプラ計測を行っているかを
視認することができる。
【0040】
一方ステップ1008において位置情報比較部14が、現時点の相対的位置情報が補正
可能範囲を超えていると判断すると(ステップ1008のNo)、位置情報比較部14は
サンプルゲート101位置の補正が行えないため、Bモード画像100の撮影及びサンプ
ルゲート101の設定のやり直しを促す内容のメッセージを表示部23に表示する(ステ
ップ1012)。図8はステップ1012における再撮影メッセージ表示の例である。図
8に示すように、表示部23に再撮影を促すメッセージを表示すると共に、移動したもの
が超音波プローブ30であるか被検体Pであるかを表示しても構わない。ステップ101
2の処理が終了すると、ステップ1001に戻り送受信部17はBモード信号の取得を行
う(ステップ1001)。
【0041】
ステップ1007において位置情報比較部14が、相対的位置情報の変化がないと判断
すると(ステップ1007のNo)、入力部21は計測終了の指示がなされたか否かを判
断する(ステップ1013)。入力部21が計測終了の指示がなされていないと判断する
と(ステップ1013のNo)、ステップ1005に戻り送受信部17は設定されたサン
プルゲート101の位置におけるパルスドプラ計測を行う(ステップ1005)。一方入
力部21が計測終了の指示がなされたと判断すると(ステップ1013のYes)、送受
信部17はパルスドプラ計測を停止してすると共に、表示部23に表示されるドプラ波形
200の更新を停止してフリーズ表示して、パルスドプラ計測を終了する(ステップ10
14)。
【0042】
以上の処理により、超音波診断装置1はパルスドプラ計測及びサンプルゲート101位
置の補正を行う。位置情報比較部14が検出した相対的位置情報の変化に基づいてサンプ
ルゲート101位置を補正することにより、ドプラ波形200を取得すべき組織Qの移動
にサンプルゲート101を追従させることができる。これにより、超音波プローブ30あ
るいは被検体Pの移動によって生じる計測誤差の発生を防ぐことができる。
【0043】
また、超音波診断装置1はサンプルゲート101位置の補正に連動してスキャンパラメ
ータの補正を行う。これにより、移動後のサンプルゲート101の位置に最適なスキャン
パラメータを用いてパルスドプラ計測を行うことができ、超音波プローブ30あるいは被
検体Pの移動によって生じる計測誤差の発生を防ぐことができる。
【0044】
また、超音波診断装置1は記憶部12に記憶された補正可能範囲の情報を用いて、現時
点の超音波プローブ30あるいは被検体Pの位置がサンプルゲート101位置の移動によ
り補正可能な範囲にあるか否かの判断を行う。補正可能な範囲にない場合は表示部23を
用いて再撮影の必要があることを報知することにより、操作者に素早く再撮影を促すこと
ができる。
【0045】
なお、本実施形態における超音波診断装置1の構成はこれに限定されず、適宣構成や動
作を省略し、あるいは追加しても構わない。例えば図4や図5において超音波プローブ3
0あるいは被検体Pが移動した場合にサンプルゲート101位置を移動させる動作を述べ
たが、サンプルゲート101と併せてスキャン範囲を移動させても構わない。図9はサン
プルゲート101と併せてBモード画像100の撮像範囲を移動する動作を示す図である
。符号110はBモード画像100が撮像可能なスキャン範囲110を示す。図9(a)
はサンプルゲート101及びBモード画像100の撮像範囲を設定した初期状態を示す。
超音波プローブ30が図上で右方向に移動したとすると、図9(b)に示すようにサンプ
ルゲート101とBモード画像100の撮像範囲が右方向に移動する。位置情報比較部1
4は、相対的位置情報の変化を検出すると、サンプルゲート101に加えてBモード画像
100の撮像範囲を変化させるための制御信号を送受信部17へと出力する。例えば図9
(b)においては、位置情報比較部14はBモード画像100の撮像範囲を、スキャン範
囲110の範囲内で左方向に移動させる制御信号を送受信部17へと出力する。送受信部
17は図9(c)に示されるようにサンプルゲート101及びBモード画像100の撮像
範囲を図上で左方向に追従させる。サンプルゲート101の移動と共にBモード画像10
0の再撮影を更新された撮像範囲を用いて行うことにより、操作者は超音波プローブ30
あるいは被検体Pの移動後にどのような位置関係でパルスドプラ計測が行われているかを
容易に視認することができる。
【0046】
また、図4や図5においてパルスドプラ計測のサンプルゲート101の位置を補正する
動作について述べたが、パルスドプラ計測に替えて連続波ドプラ計測や、Mモード画像を
撮影する際のROIに対して本実施形態の位置補正を適用しても構わない。図10にMモ
ード画像を撮影する際に設定するROI103を示す。Mモード画像は、被検体内のある
直線上におけるエコー強度の変化を時系列に並べた画像である。Mモード画像の撮像範囲
を設定するROI103は、図10に示すようにBモード画像100上に直線を配置する
ことにより設定される。位置情報比較部14が相対的位置情報に基づいて超音波プローブ
30あるいは被検体Pの移動を検出し、該移動に基づいてROI103の位置を補正する
ことにより、被検体Pの移動前の組織と対応する組織上でMモード画像の撮像を続けるこ
とができる。
【0047】
また、超音波振動子31は2次元平面をスキャン範囲とする場合について述べたが、先
述したメカ4Dプローブあるいは2Dアレイプローブによって超音波振動子31を構成し
、3次元空間をスキャンする構成において本実施形態の位置補正を適用しても構わない。
図11及び図12は2Dアレイプローブによって超音波振動子31を構成した場合の、サ
ンプルゲート101位置の補正について示す図である。図11及び図12において符号1
11は3次元のスキャン範囲を示し、符号100はサンプルゲート101を配置する際に
用いるBモード画像100の撮像範囲を示す。例えば図11のように3次元のスキャン範
囲111中にサンプルゲート101が配置された状態で、超音波プローブ30が図上の奥
方向(図11中の+x方向)に移動したとする。位置情報比較部14は相対的位置情報を
比較することにより超音波プローブ30の該移動を検出し、サンプルゲート101及びB
モード画像100の撮像範囲を移動させる。図12に移動後のサンプルゲート101及び
Bモード画像100の撮像範囲の位置を示す。3次元のスキャン範囲111内でサンプル
ゲート101及びBモード画像100の撮像範囲を移動させることにより、Bモード画像
100の撮像範囲に対して手前方向や奥方向(図12中のx方向)に超音波プローブ30
あるいは被検体Pが移動した場合であっても、移動に追従してパルスドプラ計測を行うこ
とができる。
【0048】
以上に本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示
したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は
、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、
種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の
範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含
まれる。
【符号の説明】
【0049】
P 被検体
Q 組織
1 超音波診断装置
10 システム制御部
12 記憶部
13 位置情報検出部
14 位置情報比較部
15 超音波画像生成部
16 ドプラ波形処理部
17 送受信部
18 Bモード処理部
21 入力部
23 表示部
24 ECG検出部
30 超音波プローブ
31 超音波振動子
32 プローブ位置センサ
41 基準磁場発生器
42 被検体位置センサ
【特許請求の範囲】
【請求項1】
スキャン領域を設定する入力手段と、
前記設定されたスキャン領域へ超音波を送信し、その反射波を受信することによりエコ
ー信号を得る超音波プローブと、
前記エコー信号に基づいて超音波画像を生成する超音波画像取得手段と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出
手段と、
所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する記憶手段と
、
前記位置情報検出手段が検出したプローブ位置情報と、前記基準位置情報とに基づいて
、前記スキャン領域の位置を変更するスキャン領域制御手段と、
前記スキャン位置及び前記超音波画像を表示する表示手段と
を有することを特徴とする超音波診断装置。
【請求項2】
前記超音波画像取得手段は、前記超音波画像としてドプラ波形を生成するものであって
、
前記入力手段は、前記表示手段に表示されたサンプルゲートの位置を変更することによ
り、前記スキャン領域の位置を設定する
ことを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記記憶手段は、
前記入力手段が前記スキャン領域の位置を設定したときの前記プローブ位置情報、ある
いは前記超音波画像取得手段が前記超音波画像の生成を開始するときの前記プローブ位置
情報を前記基準位置情報として記憶する
ことを特徴とする請求項1または2に記載の超音波診断装置。
【請求項4】
前記超音波プローブが超音波を送信する対象物に関する位置情報を対象物位置情報とし
て検出する対象物位置情報検出手段を更に備え、
前記記憶手段は、前記所定の時刻における前記プローブ位置情報と、前記対象物位置情
報とに基づいて基準位置情報を記憶し、
前記スキャン領域制御手段は、前記位置情報検出手段が検出したプローブ位置情報と、
前記対象物位置情報検出手段が検出した前記対象物位置情報と、前記基準位置情報とに基
づいて、前記スキャン領域の位置を変更する
ことを特徴とする請求項1または2に記載の超音波診断装置。
【請求項5】
前記記憶部は、前記スキャン領域の位置を変更する範囲である変更範囲を記憶するもの
であって、
前記スキャン領域制御手段は、前記プローブ位置情報と前記位置情報とに基づいて変更
する前記スキャン領域の位置が前記変更範囲に含まれる場合は前記スキャン領域の位置の
変更を行い、前記変更範囲に含まれない場合は前記表示手段に前記超音波プローブの移動
を促す表示を行う
ことを特徴とする請求項1乃至4のいずれか1項に記載の超音波診断装置。
【請求項6】
コンピュータに、
スキャン領域を設定する入力機能と、
超音波プローブを用いて前記設定されたスキャン領域へ超音波を送信し、その反射波を
受信することによりエコー信号を得る送受信機能と、
前記エコー信号に基づいて超音波画像を生成する超音波画像取得機能と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出
機能と、
所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する記憶機能と
、
前記位置情報検出機能が検出したプローブ位置情報と、前記基準位置情報とに基づいて
、前記スキャン領域の位置を変更するスキャン領域制御機能と、
前記スキャン位置及び前記超音波画像を表示する表示機能と
を機能させることを特徴とする超音波診断装置の制御プログラム。
【請求項1】
スキャン領域を設定する入力手段と、
前記設定されたスキャン領域へ超音波を送信し、その反射波を受信することによりエコ
ー信号を得る超音波プローブと、
前記エコー信号に基づいて超音波画像を生成する超音波画像取得手段と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出
手段と、
所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する記憶手段と
、
前記位置情報検出手段が検出したプローブ位置情報と、前記基準位置情報とに基づいて
、前記スキャン領域の位置を変更するスキャン領域制御手段と、
前記スキャン位置及び前記超音波画像を表示する表示手段と
を有することを特徴とする超音波診断装置。
【請求項2】
前記超音波画像取得手段は、前記超音波画像としてドプラ波形を生成するものであって
、
前記入力手段は、前記表示手段に表示されたサンプルゲートの位置を変更することによ
り、前記スキャン領域の位置を設定する
ことを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記記憶手段は、
前記入力手段が前記スキャン領域の位置を設定したときの前記プローブ位置情報、ある
いは前記超音波画像取得手段が前記超音波画像の生成を開始するときの前記プローブ位置
情報を前記基準位置情報として記憶する
ことを特徴とする請求項1または2に記載の超音波診断装置。
【請求項4】
前記超音波プローブが超音波を送信する対象物に関する位置情報を対象物位置情報とし
て検出する対象物位置情報検出手段を更に備え、
前記記憶手段は、前記所定の時刻における前記プローブ位置情報と、前記対象物位置情
報とに基づいて基準位置情報を記憶し、
前記スキャン領域制御手段は、前記位置情報検出手段が検出したプローブ位置情報と、
前記対象物位置情報検出手段が検出した前記対象物位置情報と、前記基準位置情報とに基
づいて、前記スキャン領域の位置を変更する
ことを特徴とする請求項1または2に記載の超音波診断装置。
【請求項5】
前記記憶部は、前記スキャン領域の位置を変更する範囲である変更範囲を記憶するもの
であって、
前記スキャン領域制御手段は、前記プローブ位置情報と前記位置情報とに基づいて変更
する前記スキャン領域の位置が前記変更範囲に含まれる場合は前記スキャン領域の位置の
変更を行い、前記変更範囲に含まれない場合は前記表示手段に前記超音波プローブの移動
を促す表示を行う
ことを特徴とする請求項1乃至4のいずれか1項に記載の超音波診断装置。
【請求項6】
コンピュータに、
スキャン領域を設定する入力機能と、
超音波プローブを用いて前記設定されたスキャン領域へ超音波を送信し、その反射波を
受信することによりエコー信号を得る送受信機能と、
前記エコー信号に基づいて超音波画像を生成する超音波画像取得機能と、
前記超音波プローブの位置に基づいて定まるプローブ位置情報を検出する位置情報検出
機能と、
所定の時刻における前記プローブ位置情報を、基準位置情報として記憶する記憶機能と
、
前記位置情報検出機能が検出したプローブ位置情報と、前記基準位置情報とに基づいて
、前記スキャン領域の位置を変更するスキャン領域制御機能と、
前記スキャン位置及び前記超音波画像を表示する表示機能と
を機能させることを特徴とする超音波診断装置の制御プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−78396(P2013−78396A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−218688(P2011−218688)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]