
超音波診断装置及び超音波走査プログラム
【課題】被検体内へ穿刺する針を利用した超音波検査の精度の向上。
【解決手段】振動子2aは、超音波を発生し、被検体からの超音波をエコー信号に変換する。送信部13は、振動子2aに駆動信号を供給する。受信部15は、振動子2aからのエコー信号を信号処理する。検出部4は、穿刺針100の先端の位置を検出する。走査領域設定部11は、被検体内の第1の走査領域と、検出された先端の位置に基づく第1の走査領域よりも狭い第2の走査領域とを設定する。送受信制御部17は、送信部13と受信部15とを制御し、第1の走査領域に対する超音波走査と第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える。
【解決手段】振動子2aは、超音波を発生し、被検体からの超音波をエコー信号に変換する。送信部13は、振動子2aに駆動信号を供給する。受信部15は、振動子2aからのエコー信号を信号処理する。検出部4は、穿刺針100の先端の位置を検出する。走査領域設定部11は、被検体内の第1の走査領域と、検出された先端の位置に基づく第1の走査領域よりも狭い第2の走査領域とを設定する。送受信制御部17は、送信部13と受信部15とを制御し、第1の走査領域に対する超音波走査と第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、超音波診断装置及び超音波走査プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブを体表から当てるだけの簡単な操作で心臓の拍動や胎児の動きの様子をリアルタイムで表示でき、かつ安全性が高い。そのため、超音波診断装置は、繰り返して検査が行える。また、超音波診断装置は、システムの規模がX線、CT、MRIなど他の診断機器に比べて小さく、片手で持ち運べる程度のものが開発されている。このような小型の超音波診断装置により、ベッドサイドへ移動して容易に検査を行うことができる。超音波診断装置は、X線などのように被曝がなく、産科や在宅医療等においても使用することができる。
【0003】
近年、静脈投与型の超音波造影剤が製品化され、「造影エコー法」が行われるようになってきている。この手法は、例えば、心臓および肝臓などの検査で静脈から超音波造影剤を注入して血流信号を増強し、血流動態の評価を行うことを目的としている。超音波造影剤の多くは微小気泡(マイクロバブル)が反射源として機能するものである。例えば、近年日本で発売されたソナゾイド(Sonazoid)と呼ばれる第二世代の超音波造影剤は、ペルフルオロブタン(perfluorobutane)ガスを内包し、リン脂質をシェル(shell)とする微小気泡であり、中低音圧の超音波で超音波造影剤の還流の様子を安定して観察することが可能になった。
【0004】
治療における超音波の応用も進んでいる。腫瘍組織の病理検査のためには、超音波ガイド下で針生検を行うことがある。さらに、肝臓がんなど限局性腫瘍のRFA(ラジオ波焼灼術:radio frequency ablation)治療のためのRFA針の穿刺や治療効果判定にも超音波診断装置が用いられている。近年はリアルタイム3次元スキャンも開発され、複数断面を観察しながら穿刺する場合もある。リアルタイム3次元スキャンは1次元アレイを機械的に揺動させるもの、2次元アレイで電子的に走査するものがある。これにより、穿刺断面のみならず、奥行き方向の針のずれも同時に観察できるようになった。
【0005】
穿刺後に針先周囲の3次元的な治療効果や組織情報を確認したいが、3次元スキャンは、空間分解能や時間分解能が2次元スキャンよりも劣る。また、針周囲の詳細な情報を解析するスキャン方法も確立されていない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006―314689号公報
【特許文献2】特開2006―305337号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
目的は、被検体内へ穿刺する針を利用した超音波検査の精度の向上を可能とする超音波診断装置及び超音波走査プログラムを提供することにある。
【課題を解決するための手段】
【0008】
本実施形態に係る超音波診断装置は、超音波を発生し、被検体からの超音波をエコー信号に変換する振動子と、前記振動子に駆動信号を供給する送信部と、前記振動子からのエコー信号を信号処理する受信部と、穿刺針の先端の位置を検出する検出部と、前記被検体内の第1の走査領域と、前記検出された先端の位置に基づき前記第1の走査領域よりも狭い第2の走査領域とを決定する決定部と、前記送信部と前記受信部とを制御し、前記第1の走査領域に対する第1の超音波走査と前記第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える送受信制御部と、を具備する。
【図面の簡単な説明】
【0009】
【図1】本実施形態に係る超音波診断装置の構成を示す図。
【図2】図1のシステム制御部の制御のもとに行われる、超音波検査の典型的な流れを示す図。
【図3】図1の穿刺針100の先端の現在位置を中心に含む局所走査領域の一例を示す図。
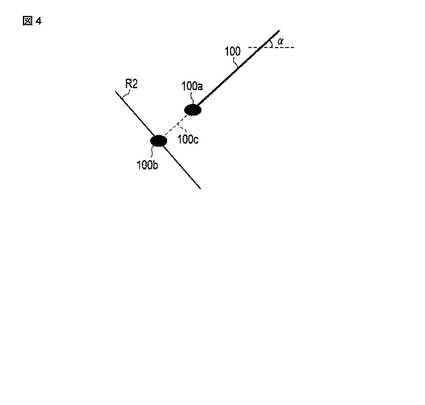
【図4】図1の穿刺針100の先端の予想到達位置を中心に含む局所走査領域の一例を示す図。
【図5】図1の送受信制御部により実行される第2の超音波走査の一例を示す図。
【図6】図1の送受信制御部により実行される第2の超音波走査の他の例を示す図。
【図7】図1の送受信制御部により実行される第2の超音波走査の他の例を示す図。
【図8】図1の送受信制御部により実行される第1の超音波走査と第2の超音波走査との切り替えを模式的に示す図。
【図9】図1の表示部による、超音波検査における画像の表示例を示す図。
【図10】図1の送受信制御部による、第2の超音波走査がSWEモードの場合の動作例を示す図。
【図11】図1の送受信制御部により実行される第1の超音波走査と第2の超音波走査との切り替えを模式的に示す他の図。
【図12】変形例1に係る送受信制御部による局所走査領域の決定処理を説明するための図。
【図13】変形例2に係る送受信制御部による局所走査領域の決定処理を説明するための図。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら本実施形態に係わる超音波診断装置及び超音波走査プログラムを説明する。
【0011】
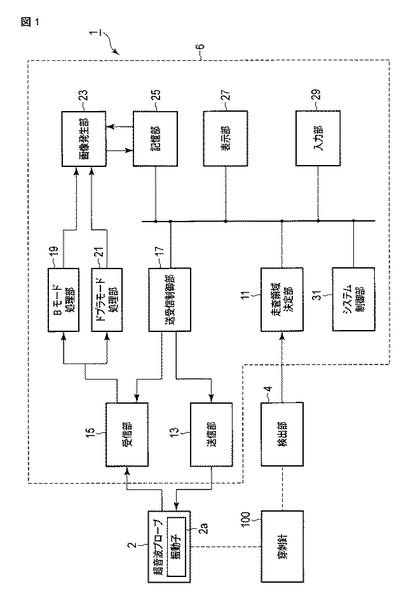
図1は、本実施形態に係る超音波診断装置1の構成を示す図である。図1に示すように、超音波診断装置1は、超音波プローブ2、検出部4、及び装置本体6を有している。装置本体6は、走査領域決定部11、送信部13、受信部15、送受信制御部17、Bモード処理部19、ドプラモード処理部21、画像発生部23、記憶部25、表示部27、入力部29、及びシステム制御部31を有している。装置本体6に内蔵される送信部13及び受信部15等は、集積回路などのハードウェアで構成されることもあるが、ソフトウェア的にモジュール化されたソフトウェアプログラムである場合もある。以下、個々の構成要素の機能について説明する。
【0012】
超音波プローブ2は、2次元状に配列された複数の振動子2aを有している。振動子2aは、送信部13からの駆動信号に応じて超音波を発生し、被検体からの反射波を電気信号(エコー信号)に変換する。複数の振動子2aの前方側には、振動子2aと被検体との間の音響インピーダンス差を整合するための整合層が取り付けられている。複数の振動子の後方側には、超音波の伝播を防止するバッキング材が取り付けられている。振動子2aから被検体に超音波が送信されると、超音波は、体内組織の音響インピーダンスの不連続面で次々と反射される。反射された超音波は、振動子2aによりエコー信号として受信される。このエコー信号の振幅は、超音波が反射された不連続面における音響インピーダンスの差に依存する。また、超音波が血流や心臓壁等の表面で反射された場合は、エコー信号は、ドプラ効果により移動体の超音波送信方向の速度成分に依存した周波数偏移を受ける。
【0013】
穿刺針100は、被検体の内部に刺入される針である。典型的には、超音波プローブ2には、穿刺針100のためのアダプタが取り付けられている。アダプタは、穿刺針100のガイドとして機能する。穿刺針100は、操作者によりアダプタを介して被検体内に刺入される。本実施形態に係る穿刺針としては、生検に利用される針やRFAに利用される針等の被検体内に刺入されるあらゆる針が適用可能である。
【0014】
検出部4は、穿刺針100の先端の位置を検出し、検出された位置に関するデータを生成する。穿刺針100の先端の位置に関するデータは、走査領域決定部11に供給される。
【0015】
走査領域決定部11は、第1の超音波走査のための第1の走査領域と第2の超音波走査のための第2の走査領域とを決定する。具体的には、走査領域決定部11は、操作者からの入力部29を介した指示に従って第1の走査領域を設定する。典型的には、第1の走査領域は、比較的広範囲な3次元領域に設定される。走査領域決定部11は、検出部4により検出された穿刺針100の先端の位置に基づいて第2の走査領域を決定する。第2の走査領域の決定方法は、大きく2つに大別される。第1の方法において第2の走査領域は、穿刺針100の先端の位置を略中心に含むように設定される。第2の方法において第2の走査領域は、穿刺針100の先端の予想到達位置を略中心に含むように設定される。第2の走査領域は、第1の走査領域よりも体積が狭い。以下の説明において、第1の走査領域を広域走査領域と呼び、第2の走査領域を局所走査領域と呼ぶことにする。
【0016】
送信部13は、図示しないトリガ発生回路、遅延回路およびパルサ回路等を有している。パルサ回路は、所定のレート周波数 fr Hz(周期;1/fr秒)で、送信超音波を形成するためのレートパルスを繰り返し発生する。遅延回路は、送信方向及び送信焦点位置に応じた遅延時間をチャンネル毎に各レートパルスに印加する。トリガ発生回路は、このレートパルスに基づくタイミングで、超音波プローブ2に駆動信号を印加する。駆動信号の印加により、遅延時間に応じた送信方向及び送信焦点位置に関する超音波送信ビームが超音波プローブ2から送信される。
【0017】
なお、送信部13は、送受信制御部17の指示に従って、送信周波数、送信駆動電圧等を瞬時に変更可能な機能を有している。特に送信駆動電圧の変更については、瞬間にその値を切り替え可能なリニアアンプ型の発信回路、又は複数の電源ユニットを電気的に切り替える機構によって実現される。
【0018】
受信部15は、図示していないアンプ回路、A/D変換器、ビームフォーマ等を有している。アンプ回路は、超音波プローブ2からのエコー信号をチャンネル毎に増幅する。A/D変換器は、増幅されたエコー信号にA/D変換を施す。ビームフォーマは、デジタルのエコー信号に、超音波受信ビームのビーム方向を決定するのに必要な遅延時間を受信焦点位置毎に印加し、遅延時間が与えられたエコー信号を加算する。この遅延加算により、超音波受信ビームに対応する受信信号が生成される。
【0019】
送受信制御部17は、操作者からの入力部29を介した指示に応じた超音波走査を実行するために送信部13と受信部15とを制御する。具体的には、送受信制御部17は、広域走査領域に対する第1の超音波走査と局所走査領域に対する第2の超音波走査とを実行する。第1の超音波走査の映像モードと第2の超音波走査の映像モードとは、操作者により入力部29を介して任意に設定可能である。本実施形態に係る映像モードとしては、Bモードやドプラモード、エラストグラフィーモード、ウォールモーショントラッキング(WMT)モード、造影モード、空間コンパウンドモード、シアウェーブ・エラストグラフィ(SWE:shear wave elastography)モード、合成開口モード等の既存のあらゆる映像モードが適用可能である。送受信制御部17は、送信部13と受信部15とを制御し、広域走査領域に対する第1の超音波走査と局所走査領域に対する第2の超音波走査とを、操作者からの入力部29を介した指示に従って切替える。
【0020】
Bモード処理部19は、受信部15からの受信信号に対数増幅や包絡線検波処理などを施し、信号強度が輝度の明るさで表現されるBモードデータを生成する。Bモード処理部19は、超音波走査の映像モードがBモードの場合に作動される。Bモードデータは、画像発生部23に供給される。
【0021】
ドプラモード処理部21は、受信部15からの受信信号に周波数解析を施し、ドプラ効果による血流や組織、造影剤エコー成分を抽出し、平均速度、分散、パワー等の血流情報をカラーで表現するドプラデータを生成する。ドプラモード処理部21は、超音波走査の映像モードがドプラモードの場合に作動される。ドプラデータは、画像発生部23に供給される。
【0022】
画像発生部23は、Bモード処理部23からのBモードデータあるいはドプラ処理部24からのドプラデータに基づいて、第1の超音波走査が実行されている場合、広域走査領域に関し第1の超音波走査の映像モードに応じた超音波画像のデータを発生する。また、画像発生部23は、Bモードデータあるいはドプラデータに基づいて、第2の超音波走査が実行されている場合、局所走査領域に関し第2の超音波走査の映像モードに応じた超音波画像のデータを発生する。具体的には、画像発生部23は、Bモードデータあるいはドプラデータに基づいて、ピクセルから構成される2次元の画像データ、または、ボクセルから構成されるボリュームデータを発生する。画像発生部23は、ボリュームデータに基づいて3次元画像処理を施し、2次元の画像データを発生する。本実施形態に係る3次元画像処理としては、ボリュームレンダリング、多断面変換表示(MPR:multi planar reconstruction)、最大値投影表示(MIP:maximum intensity projection)等が適用可能である。例えば、画像発生部23は、映像モードがBモードの場合、Bモードデータに基づいてBモード画像を発生する。また、画像発生部23は、映像モードがドプラモードの場合、ドプラデータに基づいてドプラ画像を発生する。画像発生部23は、映像モードがエラストグラフィーモードまたはSWEモードの場合、ドプラデータに基づいて、被検体の硬さ情報の空間分布を表現するエラスト画像を発生する。画像発生部23は、映像モードがWMTモードの場合、ドプラデータに基づいて、臓器の運動機能情報の空間分布を表現するWMT画像を発生する。画像発生部23は、映像モードが造影モードの場合、生成部23は、超音波造影剤からの信号成分が特異的に描出される造影画像を発生する。なお、画像発生部23に供給される前のデータは、「生データ」と呼ばれることがある。
【0023】
記憶部25は、画像発生部23により生成された超音波画像のデータを記憶する。また、記憶部25は、本実施形態に係る超音波検査のための制御プログラムを記憶している。
【0024】
表示部27は、画像発生部23により生成された超音波画像を表示機器に表示する。表示機器としては、例えばCRTディスプレイや、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等が適用可能である。
【0025】
入力部29は、操作者からの各種指示を装置本体6にとりこむための入力機器を搭載している。例えば、入力部29は、操作者からの指示に従って第1の超音波走査と第2の超音波走査との切り替え指示を入力する。入力機器としては、トラックボール、各種スイッチ、ボタン、マウス、キーボード等が適用可能である。
【0026】
システム制御部31は、情報処理装置(計算機)としての機能を持ち、超音波診断装置1の動作を制御する。システム制御部31は、記憶部25から本実施形態に係る超音波検査のための制御プログラムを読み出し、この制御プログラムに従って各部を制御する。
【0027】
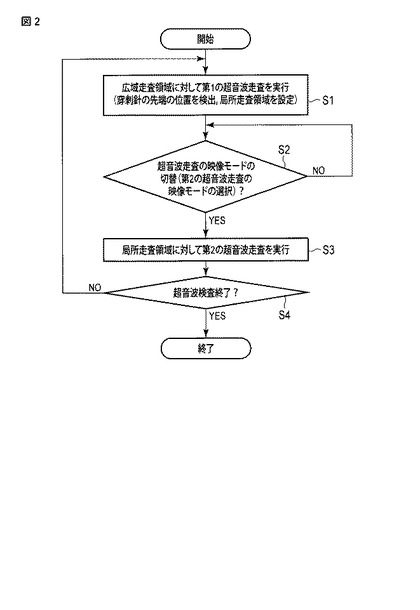
次に、システム制御部31の制御のもとに行われる本実施形態に係る超音波検査について、超音波ガイド下での針生検を例に挙げて説明する。図2は、システム制御部31の制御のもとに行われる、超音波検査の典型的な流れを示す図である。
【0028】
図2に示すように、システム制御部31は、操作者により入力部29を介して走査開始指示が入力されたことを契機として、実施例1に係る超音波走査を開始する。超音波走査時において、操作者は、針生検のための穿刺針を被検体内の目標部位に向けて挿入し始める。
【0029】
まず、システム制御部31は、送受信制御部17に第1の超音波走査を実行させる(ステップS1)。ステップS1において送受信制御部17は、広域走査領域に対して第1の超音波走査を実行するために、送信部13と受信部15とを制御する。第1の超音波走査は、穿刺針を目標部位に到達させるためのガイドとして利用される。従って、第1の超音波走査の映像モードは、典型的には、被検体内の形態情報を描出可能なBモードに設定される。また、広域走査領域は、3次元状の領域に設定される。広域走査領域は、第1の超音波走査の開始前に、走査領域決定部11により、操作者により入力部29を介した指示に従って設定されている。Bモードスキャンにおいては、送信部13は、送受信制御部17により制御のもと、広域走査領域を超音波で繰り返し走査するように超音波プローブ2から超音波を送信させる。受信部15は、送受信制御部17による制御のもと、超音波ビーム毎に受信信号を生成する。そしてBモード処理部19は、生成された受信信号にBモード処理を施し、Bモードデータを生成する。そして画像発生部23は、生成されたBモードデータに基づいて広域走査領域に関するボリュームデータを生成し、生成されたボリュームデータに基づく所定のBモード画像を生成する。典型的には、ステップS1のBモードスキャンにおいて生成されるBモード画像としては、A断面に関する断面画像とB断面に関する断面画像とが挙げられる。なお、A断面は、通常の断面、すなわち、超音波の走査面であり、B断面は、A断面を中心軸(走査面のステアリング角度0度の走査線に対応)回りに90度だけ回転させた面である。操作者は、表示部27により表示されているA断面に関する断面画像とB断面に関する断面画像とを観察しながら、穿刺針100を目標部位に向けて挿入する。
【0030】
なお、ステップS1において生成されるBモード画像としては、A断面に関する断面画像とB断面に関する断面画像とに限定されない。例えば、A断面及びB断面以外の断面に関する断面画像であってもよい。また、Bモード画像としては、断面画像のみに限定されず、ボリュームレンダリングにより生成されるボリュームレンダリング画像、画素値投影処理により生成される投影画像であってもよい。
【0031】
超音波検査時において検出部4は、検出処理を繰り返し実行している。検出部4は、実空間上における穿刺針の先端の位置を検出する。例えば、検出部4は、穿刺針100の先端に取り付けられた位置センサにより実現される。位置センサは、磁気や光などにより実空間上の位置を検出可能なセンサである。この場合、検出部4は、一定時間毎に穿刺針100の先端の位置を検出し、検出された位置のデータを装置本体6に送信する。また、システム制御部31は、超音波検査時において走査領域決定部11に決定処理を行わせる。
【0032】
なお、検出部4による穿刺針の先端の位置の検出方法は、位置センサを利用する方法のみに限定されない。例えば、検出部4は、穿刺針が描出された超音波画像を画像処理することにより穿刺針の先端の位置を検出しても良い。具体的には、検出部4は、穿刺針の先端の輝度値や穿刺針の形状を利用して超音波画像から穿刺針の先端領域を検出することができる。画像処理による穿刺針の先端の位置を検出する場合、検出部4は、装置本体6に設けられていると良い。
【0033】
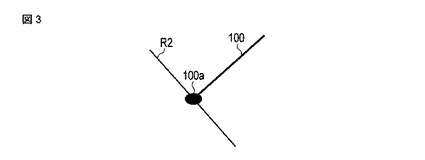
ステップ1において走査領域決定部11は、検出部4により検出された穿刺針100の先端の位置に基づいて局所走査領域を決定する。局所走査領域は、広域走査領域よりも体積が小さければ、2次元状であっても3次元状であってもよい。局所走査領域の中心は、穿刺針100の先端の現在位置に一致される。
【0034】
図3は、穿刺針100の先端100aの現在位置を中心に含む局所走査領域R2の一例を示す図である。図3に示すように、局所走査領域R2が断面(走査面)の場合、走査面は、穿刺針100の先端100aの現在位置を中心に含み、且つ、穿刺針100に直交するように設定される。
【0035】
なお、上述のように局所走査領域の中心は、穿刺針100の先端の現在位置ではなく、穿刺針100の先端の予想到達位置に一致していても良い。図4は、穿刺針100の先端100aの予想到達位置100bを中心に含む局所走査領域R2の一例を示す図である。図4に示すように、局所走査領域R2が断面(走査面)の場合、走査面は、穿刺針100の先端100aの予想到達位置100bを中心に含み、且つ、先端100aの予測経路100cに直交するように設定される。予想到達位置100bは、検出部4により検出された先端100aの現在位置と穿刺針100の刺入角度αとに基づいて走査領域決定部11により決定される。刺入角度αは、既存の如何なる方法により計算されてもよい。例えば、刺入角度αは、穿刺針100の先端100aに設けられた位置センサからの位置データと穿刺針100の根本に設けられた位置センサ(図示せず)からの位置データとに基づいて走査領域決定部11により算出される。なお走査領域決定部11は、超音波画像上に描出された穿刺針領域を利用して刺入角度を算出しても良い。走査領域決定部11は、先端100aの現在位置と刺入角度とに基づいて予測経路100cを算出する。そして走査領域決定部11は、予測経路100c上にあって先端100aの現在位置から所定距離だけ離れた点を予想到達位置100cに決定する。所定距離は、操作者により入力部29を介して任意に設定可能である。なお予測経路100cは、検出部4により繰り返し検出された先端100aの位置の軌跡に基づいて算出されても良い。
【0036】
なお、局所走査領域の大きさ及び形状は、入力部29を介して操作者により任意に調整可能である。局所走査領域は、走査領域決定部11によりリアルタイムに更新される。すなわち、走査領域決定部11は、超音波検査時において、穿刺針100の先端の位置に局所走査領域を追従させることができる。換言すれば、走査領域決定部11は、穿刺針100の先端の移動に連動して、局所走査領域の位置を変更する。
【0037】
ステップS1において表示部27は、検出部4により検出された穿刺針100の先端の位置を、第1の超音波走査に関する超音波画像上に重ねて表示してもよい。例えば、穿刺針100の先端の位置を示すマークや、穿刺針100の先端の位置を指し示す矢印等が重ねられるとよい。
【0038】
ステップS1が行われるとシステム制御部31は、入力部29により映像モードの切り替えが行われることを待機する(ステップS2)。操作者は、穿刺針100が目標部位に到達すると、生検のために採取組織の確認等を行う。採取組織の確認は、詳細な形態情報や機能情報等を利用して行われる。従って、広域走査領域のBモードスキャンでは、穿刺針先端近傍の採取組織等を高精度に確認することができないので、ステップS2において走査領域と映像モードとの切り替えが行われる。
【0039】
操作者は、装置本体等に設けられた切り替えボタンを押すことにより、走査領域と映像モードとの切り替えを行う。切り替えボタンが押されることにより、第1の超音波走査から第2の超音波走査に切替えられ、広域走査領域から局所走査領域に切替えられる。第2の超音波走査の映像モードは、第1の超音波走査の映像モードと同じでも異なっていても良い。第2の超音波走査の映像モードは、予め入力部29を介して登録されていても、切り替え時に入力部29を介して選択されてもどちらでもよい。
【0040】
ステップS2において映像モードの切り替えが行われない場合(ステップS2:NO)、システム制御部31は、第1の超音波走査を繰り返す。
【0041】
そしてステップS2において映像モードの切り替えが行われた場合(ステップS2:YES)、システム制御部31は、送受信制御部17に第2の超音波走査を行わせる(ステップS3)。ステップS3において送受信制御部17は、走査領域決定部11により設定された局所走査領域に対して第2の超音波走査を実行するように、送信部13と受信部15とを繰り返す。画像発生部23は、第2の超音波走査の実行時において、第2の超音波走査に応じた超音波画像を生成し、表示部27は、生成された超音波画像を表示する。なお、第2の超音波走査時においても検出部4と走査領域決定部11とは繰り返し作動している。すなわち、第2の超音波走査時においても走査領域決定部11により局所走査領域が穿刺針100の先端の位置に追従される。画像発生部23は、経時的に変化する穿刺針100の先端の位置または予想到達位置を含む超音波画像を繰り返し発生する。表示部27は、繰り返し発生される超音波画像を即時的に表示する。このような超音波画像は、穿刺針100の先端の位置または予想到達位置を視点とし穿刺ラインを視線とする画像であるといえる。すなわち、表示部7は、疑似的に穿刺針100の先端に身を置いたような臨場感を操作者に与えることができる。
【0042】
ステップS3において表示部27は、検出部4により検出された穿刺針100の先端の位置または予想到達位置を、第2の超音波走査に関する超音波画像I2上に重ねて表示してもよい。例えば、穿刺針100の先端の位置を示すマークや、穿刺針100の先端の位置を指し示す矢印等が重ねられるとよい。
【0043】
ここで、第2の超音波走査について詳細に説明する。なお、以下の説明において局所走査領域は、穿刺針100の先端の現在位置を中心に含む場合にも、穿刺針100の先端の予想到達位置を中心に含む場合にも適用可能である。しかしながら、説明の煩雑さを低減するため、局所走査領域は、穿刺針100の先端の現在位置を中心に含むものとする。
【0044】
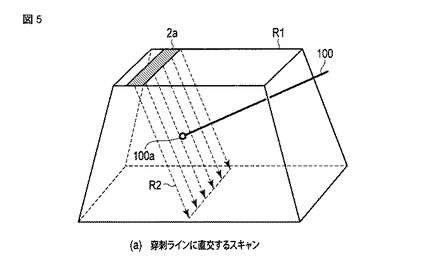
図5は、第2の超音波走査の一例を示す図である。図5に示すように、第1の超音波走査の広域走査領域R1は、第1の超音波走査が穿刺針100のガイドとして利用されるので、比較的広範囲な3次元領域に設定される。このため、第1の超音波走査(3次元走査)のフレームレート(時間分解能)は、リアルタイム性に劣る場合がある。また、ボリュームデータに基づく断面画像は、2次元走査によるBモード画像に比して空間分解能が劣る。
【0045】
一方、図5に示すように、第2の超音波走査の局所走査領域R2は、第2の超音波走査が穿刺針100の先端100a近傍における組織の観察に利用されるので、比較的狭い範囲に設定される。例えば、局所走査領域R2は、図5に示すように、穿刺針100の先端100aの位置を中心に含む走査面(断面)に設定される。このように走査領域を穿刺針の先端近傍の2次元領域に限定することで、第2の超音波走査における時間分解能及び空間分解能を、第1の超音波走査よりも向上させることができる。局所走査領域R2は、例えば、穿刺針100の先端100a近傍の組織の視認性向上等のため、穿刺ラインに対して直交するように設定されるとよい。この際、走査面(局所走査領域R2)の向きは、穿刺針100の刺入角度に基づいて設定される。なお、走査面(局所走査領域R2)は、穿刺ラインに対して如何なる角度に設定されてもよい。設定された局所走査領域R2の位置及び向きに応じて、送受信制御部17は、超音波プローブ2に搭載されている振動子の中から、超音波送信に利用する振動子2aを選択する。そして、送信部13は、選択された振動子2aを利用して局所走査領域に超音波を送信する。
【0046】
なお、局所走査領域R2は、穿刺針100の先端100a近傍の穿刺ラインに直交する断面であるとした。しかしながら、本実施形態はこれに限定されない。局所走査領域R2は、例えば、先端100a近傍の3次元領域や、穿刺針100を含む任意の複数断面でも良い。さらに、穿刺針100の移動に連動して、局所走査領域R2と超音波送信に利用する振動子2aとを追従させることもできる。
【0047】
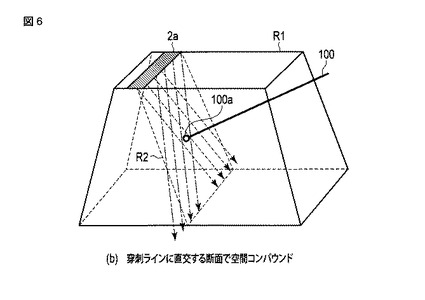
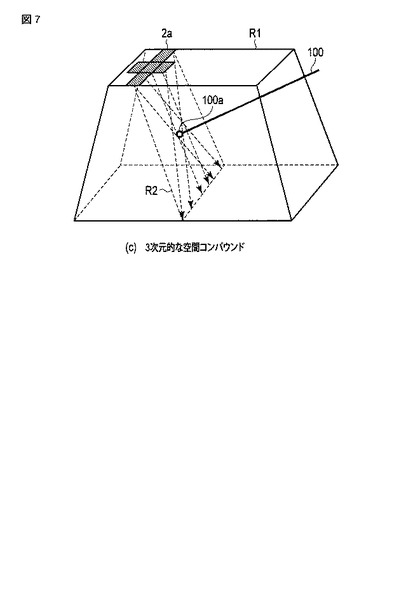
図6は、第2の超音波走査の他の例を示す図であり、2次元的な局所走査領域R2に対する2次元的な空間コンパウンドを利用した超音波走査を示す図である。空間コンパウンドにおいて送信部13は、送受信制御部17の制御のもと、2次元的な局所走査領域(走査面)R2を偏向走査する。超音波送信に利用される振動子2aは、局所走査領域(走査面)R2に交差し、一列に配列された複数の振動子である。また、図7は、第2の超音波走査の他の例を示す図であり、局所走査領域R2に対する3次元的な空間コンパウンドを利用した超音波走査を示す図である。超音波送信に利用される振動子2aは、局所走査領域(走査面)R2に交差する一列の振動子とこの一列の振動子に隣接する振動子とからなる2次元状に配列された複数の振動子である。
【0048】
図6および図7に示すように、第2の超音波走査は、空間コンパウンドを利用した超音波走査でもよい。偏向走査により2次元状の局所走査領域に対して複数の送信方向にそれぞれ対応する複数の超音波送信が実行される。画像発生部23は、複数の超音波送信の各々について、局所走査領域R2に関するBモード画像を生成する。そして画像発生部23は、複数の超音波送信にそれぞれ対応する複数のBモード画像を合成し、単一のBモード画像(合成画像)を生成する。表示部27は、生成された合成画像を表示する。この合成画像は、単一の送信方向に関する超音波走査のBモード画像に比して、空間コンパウンドの効果により画質が向上している。従って、第2の超音波走査として空間コンパウンドを利用した超音波走査が実行されることにより、操作者は、穿刺針の先端近傍の組織を高画質の超音波画像を観察することができる。
【0049】
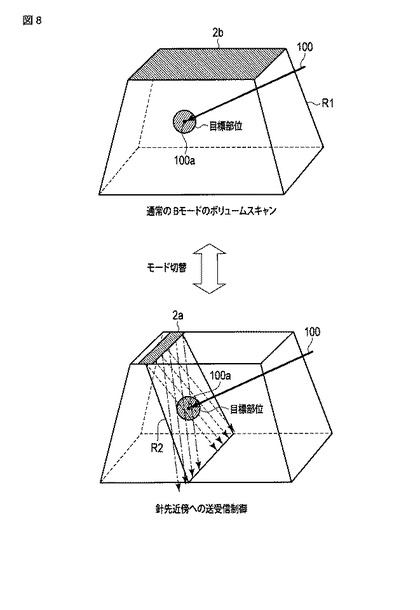
上述のように、送受信制御部17は、操作者からの入力部29を介した指示に従って、第1の超音波走査と第2の超音波走査とを切り替える。図8は、第1の超音波走査と第2の超音波走査との切り替えを模式的に示す図である。図8に示すように、例えば、第1の超音波走査としては、通常のBモードボリュームスキャンが適用され、第2の超音波走査としては、穿刺針100の先端100a近傍への限局的なBモードスキャンが適用される。第1の超音波走査においては、超音波プローブ2に含まれる全ての振動子2bが超音波送信に利用され、第2の超音波走査においては、上述したように、超音波プローブ2内の一部の振動子2aが超音波送信に利用される。入力部29は、第1の超音波走査と第2の超音波走査とを瞬時に切替えるユーザインターフェース(U/I)を有している。このユーザインターフェースが操作者により操作されることにより、通常のBモードボリュームスキャンと先端100a近傍への限局的なスキャンとが送受信制御部17により瞬時に切替えられる。
【0050】
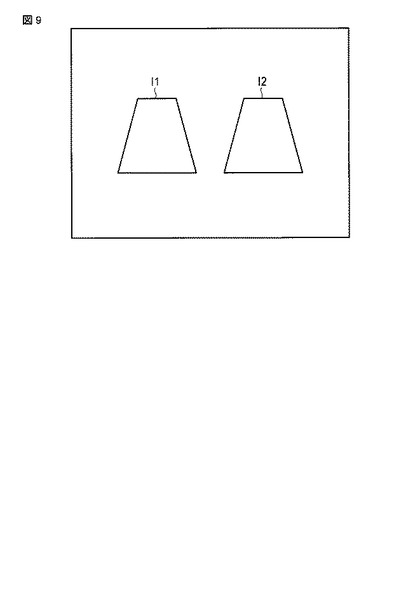
図9は、超音波検査における画像の表示例を示す図である。図9に示すように、表示部27は、第2の超音波走査の実行時において、第1の超音波走査に関する超音波画像I1と第2の超音波走査に関する超音波画像I2とを並べて表示する。超音波画像I1は、第1の超音波走査時において生成された画像であり、静止画である。例えば、超音波画像I1は、Bモードボリュームスキャンにより画像発生部23により生成されたボリュームデータに基づく画像である。超音波画像I1の表示方法は、A断面等に関する断面画像、ボリュームレンダリングによるボリュームレンダリング画像、最大値投影(MIP)による投影画像が好適である。なお、表示される断面画像は、一枚であっても良いし、直交3断面等の複数断面であってもよい。超音波画像I2は、リアルタイムに生成される画像であり、動画である。例えば、超音波画像I2は、Bモードスキャンにより画像発生部23により生成された、2次元の局所走査領域に関するBモード画像である。従って、超音波画像I2は、超音波画像I1に比して時間分解能及び空間分解能が良い。なお、第2の超音波走査における超音波画像I2の表示方法は上述の方法のみに限定されない。例えば、超音波画像I1に超音波画像I2を重ねて表示してもよい。また、超音波画像I2のみを表示してもよい。
【0051】
なお、第2の超音波走査の映像モードは、一種類に限定されない。例えば、第2の超音波走査の映像モードとして、複数種類の映像モードが設定されてもよい。すなわち、第2の超音波走査の映像モードは、Bモードやドプラモード、エラストグラフィーモード、ウォールモーショントラッキング(WMT)モード、造影モード、SWEモード、空間コンパウンドモード、合成開口モードのうちの少なくとも2種類であってもよい。第2の超音波走査において、複数種類の映像モードにそれぞれ対応する複数種類の超音波走査が、送受信制御部17の制御のもと、所定回数の超音波送受信おきに交互に繰り返される。この場合、図9の超音波画像I2は、第1の映像モードに関する超音波画像と第2の映像モードに関する超音波画像との重ね合わせ画像となる。例えば、第2の超音波走査において、Bモードスキャンとドプラモードスキャンとが交互に繰り返されてもよい。この場合、超音波画像I2は、Bモード画像とドプラ画像との重ね合わせ画像となる。より詳細には、超音波画像I2において、Bモードスキャン時にBモード画像が更新され、ドプラモードスキャン時にドプラ画像が更新される。この表示により、操作者は、形態情報と血流情報とをリアルタイムで同時に観察することができる。
【0052】
第2の超音波走査に関する超音波画像I2に対して、画質向上のための種々の画像処理を適用してもよい。例えば、特許文献2に記載の微小構造物を抽出する処理を、空間コンパウンドに基づく超音波画像I2に適用することも可能である。乳腺の臨床応用の場合、微細石灰化領域の組織を採取して、病理検査にて良性/悪性を診断するケースがある。Bモードボリュームスキャンだけでは、穿刺針が所望の石灰化領域に挿入されたか確認が難しいが、針先近傍で、上記処理を適用することで、確認が容易になる。なお、特許文献2に記載の画像処理を空間コンパウンドに基づく超音波画像I2に適用することで、超音波画像I2に含まれる微小構造物の抽出能が向上することが知られている。
【0053】
また、第2の超音波走査の映像モードは、Bモードのみに限定されない。第2の超音波走査の映像モードとしては、上述のように、エラストグラフィーモードや、ドプラモード、造影モードなども適用可能である。例えば、エラストグラフィーモードの場合、操作者は、超音波プローブ2で被検体を圧迫して解放する。ドプラモード処理部19は、圧迫と開放とに起因する組織の速度情報の空間分布を算出する。画像発生部23は、算出された速度情報の空間分布に基づいて硬さ情報の空間分布を算出し、算出された硬さ情報の空間分布をカラーで表現するエラストグラフィー画像を生成する。表示部27は、生成されたエラストグラフィー画像を表示する。
【0054】
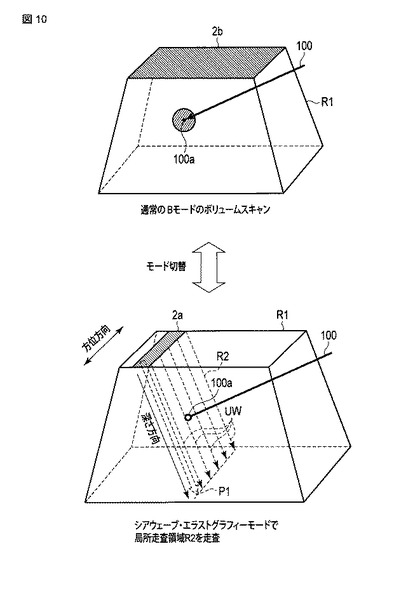
また、第2の超音波走査の映像モードは、SWEモードでも良い。SWEモードは、走査領域内でのシェアウェーブの伝搬速度が組織の硬さに依存していることを利用した撮像方法である。以下、図10を参照しながら、第2の超音波走査がSWEモードの場合について詳細に説明する。第1の超音波走査の実行中、操作者は、入力部29を介して第1の超音波走査から第2の超音波走査への切替指示を入力する。切替指示が入力されることを契機としてシステム制御部31は、第1の超音波走査から第2の超音波走査に切り替える。第2の超音波走査において送受信制御部17は、局所走査領域に対してSWE走査を実行する。局所走査領域は、断面であっても3次元領域であっても良い。しかしながら、以下の説明において局所走査領域は断面であるとする。
【0055】
まず、送受信制御部17は、送信部13にプッシュパルスと呼ばれる高圧超音波パルスP1を送信させる。具体的には、送信部13は、所定の送信焦点位置に集束されるプッシュパルスP1を局所走査領域R2の方位方向に関する端部に送信する。送信部13は、深さ方向に沿って送信焦点位置を切り替えながらプッシュパルスP1を繰り返し送信する。プッシュパルスP1が送信されると局所走査領域R2内には、剪断波が発生する。剪断波は、横波である。剪断波が局所走査領域R2内を伝搬することにより局所走査領域P1内の組織が歪む。剪断波による組織の歪みの度合いは組織の硬さに依存する。
【0056】
プッシュパルスP1が送信されると送受信制御部17は、剪断波の伝搬計測モードを実行する。具体的には、送受信制御部17は、送信部13を制御して局所走査領域R2の全体に亘って剪断波計測のためのトラッキングパルスUWを繰り返し送信し、受信部15を制御して局所走査領域R2からの超音波を繰り返し受信する。より詳細には、送受信制御部17は、プッシュパルスP1の送信位置から所定距離L1だけ離れた観察領域T1に対して、トラッキングパルスUWを複数回繰り返し送受信する。観察領域T1は、局所走査領域R2の部分領域である。トラッキングパルスUWは、観察領域T1内の組織の変位量と変位を生じた時刻とを観察するための超音波パルスである。ドプラモード処理部21は、受信部15からの受信信号に自己相関演算を施して観察領域T1に関する組織の変位の空間分布を繰り返し算出する。画像発生部23は、異なる時刻に関する組織の変位の空間分布に基づいて観察領域T1に関する剪断波の到達時間の空間分布を算出する。剪断波の到達時間は、基準時刻からの、組織の変位量が最大となる時間に対応する。基準時刻は、例えば、プッシュパルスの送信時刻に規定される。
【0057】
プッシュパルス送信位置から所定距離L1だけ離れた位置のトラッキングパルスUWの送信が行われると、送受信制御部17は、再びプッシュパルスP1を送信し、次は所定距離L2だけ離れた観察領域T2に対して、トラッキングパルスUWを繰り返し送受信する。観察領域T2は、局所走査領域R2の部分領域である。これにより、画像発生部23は、観察領域T1に対して行った走査と同様に、観察領域T2についての剪断波の到達時間の空間分布を算出する。
【0058】
このようにして、全ての局所走査領域R2の全体に亘ってトラッキングパルスUWが送信されると、画像発生部23は、組織の硬さをカラーで表現するSWE画像を発生する。ここで、剪断波の伝搬速度と組織の硬さとは一定の比例関係にあることが知られている。すなわち、剪断波の伝搬速度が速い領域は、弾性率が高く、硬い領域である。剪断波の伝搬速度が遅い領域は、弾性率の低く、柔らかい領域である。画像発生部23は、この比例関係に従って、局所走査領域R2に関する到達時間の空間分布に基づいて組織の硬さの空間分布を算出する。そして、画像発生部23は、組織の硬さをカラーで表現するSWE画像を発生する。表示部27は、SWE画像を表示する。
【0059】
なお、上述の動作では観察領域をずらしながら、各観察領域についてプッシュパルス送信とトラッキングパルス送受信とを順番に行う動作について説明したが、種々のバリエーションがあってもよい。例えば、トラッキングパルスは送信ビーム1本に対して複数の受信ビームを形成し、観察領域を広げるような、所謂並列同時受信の手法を利用してもよい。
【0060】
なお、SWE画像の精度の向上のため、異なるプッシュパルス送信位置に関する二つのSWE画像に基づく合成画像が表示されても良い。この場合、送受信制御部17は、上述と同様の方法により、第1のSWE走査と第2のSWE走査とを交互に繰り返す。すなわち、送受信制御部17は、第1のSWE走査において、送信部13を制御して局所走査領域R2の一端部に向けてプッシュパルスを送信し、送信部13と受信部15とを制御して局所走査領域R2全体に亘って剪断波の伝搬計測モード走査を実行する。そして、ドプラモード処理部21は、受信部15からの受信信号に自己相関演算を施して組織の変位の空間分布を算出し、画像発生部23は、組織の変位の空間分布に基づいて第1のSWE画像を発生する。第2のSWE走査において送受信制御部17は、送信部13を制御して局所走査領域R2の他端部に向けてプッシュパルスを送信し、送信部13と受信部15とを制御して局所走査領域R2全体に亘って剪断波の伝搬計測モード走査を実行する。そして、ドプラモード処理部21は、受信部15からの受信信号に自己相関演算を施して組織の変位の空間分布を算出し、画像発生部23は、組織の変位の空間分布に基づいて第2のSWE画像を発生する。
【0061】
第1のSWE走査と第2のSWE走査とは交互に繰り返される。第1のSWE画像と第2のSWE画像とが発生されると画像発生部23は、第1のSWE画像と第2のSWE画像との合成画像を発生する。表示部27は、合成画像を表示する。操作者は、合成画像を観察することによって組織の硬さをより正確に評価することができる。
【0062】
なお上述のSWE走査において局所走査領域は断面であるとした。しかしながら、本実施形態に係るSWE走査における局所走査領域は3次元領域であっても良い。
【0063】
ステップS3が行われるとシステム制御部31は、操作者により入力部29を介して超音波走査の終了指示がなされることを待機している(ステップS4)。ステップS3が行われると操作者は、第2の超音波走査による超音波画像を観察し、目的部位に穿刺針の先端が到達したか否かを判断する。到達したと判断した場合、操作者は、組織採取等を行う。そして、生検が終了すると操作者は、入力部29等を介して超音波検査の終了指示を入力する。
【0064】
このようにしてステップS4において終了指示がなされた場合(ステップS4:YES)、システム制御部31は、超音波検査を終了する。
【0065】
なお本実施形態の臨床応用例は、針生検のみに限定されない。本実施形態は、肝がんなどの限局性腫瘍に対するラジオ波焼灼術、すなわち、RFA治療等の穿刺針を利用した如何なる超音波診断にも適用可能である。RFA治療は、表面に高温を発生するための電極が取り付けられた穿刺針(電極針)を利用する。より詳細には、RFA治療は、電極針を体表から腫瘍部に刺入し、ラジオ波により発生する高温により病変部を凝固死させる治療法である。近年では、RFA治療の効果判定に造影超音波が利用されることが多い。治療前は腫瘍血管により血流が豊富であるが、治療後はがん細胞が死滅し、血流が減少するためである。3次元的に分布する腫瘍の治療効果を判定するためにリアルタイム3次元超音波スキャンが有用であるが、リアルタイム3次元超音波スキャンは、2次元超音波スキャンに比べ時間分解能及び空間分解能が劣る。
【0066】
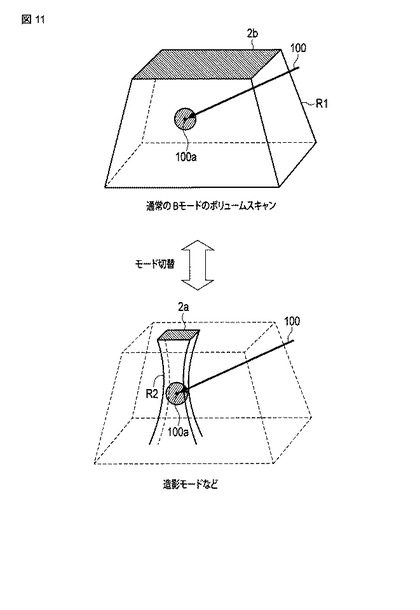
RFA治療の場合、図2のステップS1において、電極針が治療部位に向けて刺し入れられる。目標部位に電極針が到達すると、電極針による治療部位の焼灼が行われる。例えば、電極針は、治療装置に接続されている。腫瘍サイズやRFA針の種類に応じて治療装置の出力強度や出力時間が設定される。そしてステップS2において第2の超音波走査の映像モードが選択される。映像モードとして、造影モード、ドプラモード、エラストグラフィーモードなどが選択される。治療により腫瘍血流の減少、組織変性に伴う硬さの変化を観察するのに適した映像モードが選択される。特に、造影モードでは造影剤流入の経時変化を観察する必要があるが、関心領域のみに限局された造影モードのため、時間分解能を高く維持できリアルタイム性も犠牲にならない。表示方法としては、複数断面表示、ボリウム表示を適宜選択可能である。なお、図11に示すように、Bモード3次元スキャンと局所走査領域に対する造影モードのスキャンとは瞬時に切替え可能である。ステップS3では、ステップS2で選択された映像モードで治療効果が行われる。腫瘍部分に血流が残存しているかなどが観察される。観察により、治療範囲が十分であれば終了、腫瘍部分の残存が認められれば、再びステップS1に戻り、電極針の穿刺または追加の治療が行われる。従って、本実施形態によれば、RFA治療効果判定の精度向上が実現する。
【0067】
このように、本実施形態に係る超音波診断装置1は、穿刺針を利用した超音波検査に有効な技術を提供している。
【0068】
以下、本実施形態に係る変形例について説明する。
【0069】
(変形例1)
上述の実施形態に係る局所走査領域は、穿刺針100の先端の現在位置または現在位置に応じた予想到達位置に従って決定されるものとした。この場合、穿刺針100の先端の現在位置の移動に連動して局所走査領域も移動することとなる。針生検やRFA治療中、目標部位を観察したいにもかかわらず穿刺針100が不用意に動いてしまう場合がある。穿刺針100の先端の現在位置に連動して局所走査領域の位置が決定される場合、目標部位等の観察対象部位から穿刺針100が引き抜かれると局所走査領域は当該目標部位から外れてしまう。従って操作者は、観察対象部位から穿刺針100がずれる毎に穿刺針100の位置を調整しなければならない。変形例1に係る局所走査領域は、予め記憶された過去の穿刺針100の先端の位置に基づいて決定される。以下、変形例1に係る超音波診断装置及び超音波撮像方法について説明する。なお以下の説明において、本実施形態と略同一の機能を有する構成要素については、同一符号を付し、必要な場合にのみ重複説明する。
【0070】
図12は、変形例1に係る局所走査領域の決定処理について説明するための図である。図12に示すように、穿刺針100の挿入中、局所走査領域は、穿刺針100の先端の位置に連動して設定される。操作者は、局走査領域R2を固定させたい位置に穿刺針100の先端100aが到達したと判断すると、入力部29を介して記憶指示を入力する。例えば、操作者は、穿刺針100の先端が観察対象部位に到達したことを契機として記憶指示を入力する。記憶指示が入力されることを契機として記憶部25は、当該記憶指示が入力された時点における先端100aの位置データを記憶する。走査領域決定部11は、記憶部25に記憶されている位置データを読み出し、読み出された位置に基づいて局所走査領域を決定する。これにより局所走査領域は、穿刺針100が移動しても先端100aの位置に連動して動くことはなく固定されこととなる。なお、操作者が入力部29を介して連動指示がなされた場合、走査領域決定部11は、再び局所走査領域R2を穿刺針100の先端の現在位置に連動させる。
【0071】
上述の説明において、記憶指示が入力されることを契機として、即座に、記憶部25に記憶されている位置データに局所走査領域R2が設定され第2の超音波走査が実行されるものとした。しかしながら、本実施形態はこれに限定されない。すなわち、局所走査領域R2の記憶と超音波走査とが個別に行われても良い。例えば、操作者により入力部29を介して固定指示が入力されることを契機として走査領域決定部11は、記憶部25に記憶されている先端100aの位置データを読み出し、読み出された位置に基づいて局所走査領域R2を決定する。この場合、走査領域決定部11は、観察対象部位から穿刺針100が引き抜かれた後においても、観察対象部位に局所走査領域R2を設定することができる。
【0072】
従って、穿刺針100の先端位置と観察対象部位とがずれた場合においても、観察対象部位の観察を目的として穿刺針100を刺し直す手間を省くことができる。
【0073】
また、第2の超音波走査がSWEモードの場合、本実施形態に係る超音波診断装置は、穿刺針100を局所走査領域から引き抜いた状態でSWE走査を実行することができる。従って、変形例1によればSWEモードの精度の向上も実現する。
【0074】
(変形例2)
上述の実施形態に係る局所走査領域は、穿刺針100の先端の位置または先端の予想到達位置を含むものとした。しかしながら、本実施形態に係る局所走査領域は、これに限定されない。変形例2に係る局所走査領域は、穿刺針100の先端の現在位置に基づく予測経路に基づいて決定される。以下、変形例2に係る超音波診断装置及び超音波撮像方法について説明する。なお以下の説明において、本実施形態と略同一の機能を有する構成要素については、同一符号を付し、必要な場合にのみ重複説明する。
【0075】
図13は、変形例2に係る局所走査領域R2の決定処理について説明するための図である。なお、変形例2に係る局所走査領域R2は断面SCであるものとする。図13に示すように、針生検等の実施中または実施前において、走査領域決定部11は、穿刺針100の予測経路100cを算出する。予測経路の算出方法は、上述の方法と同様なので、ここでの説明を省略する。予測経路100cが算出されると走査領域決定部11は、予測経路100cに直交する複数の断面SCをそれぞれ複数の局所走査領域R2に設定する。例えば、図13の場合、予測経路100cに直交する4つの断面SC1、SC2、SC3、SC4が設定される。
【0076】
第2の超音波走査への切替指示がなされることを契機として送受信制御部17は、複数の局所走査領域SC(R2)に対して順番に第2の超音波走査を施す。これにより画像発生部23は、複数の局所走査領域SC(R2)に関する複数の超音波画像IUを発生し、表示部27は、複数の超音波画像IUを表示する。複数の超音波画像IUは、並べて表示されても良いし、穿刺針100の先端に近い方から順番に表示されても良い。
【0077】
変形例2のように穿刺針100の予測経路に直交する複数の超音波画像を表示することにより、操作者は、予め穿刺針100の刺入経路を刺入前に観察することができる。従って、穿刺針100の刺入経路を刺入前に再検討することができ、穿刺針100の刺し直しを防止することができる。
【0078】
[効果]
上記の説明のように、本実施形態に係る超音波診断装置1は、少なくとも、超音波プローブ2、送信部13、受信部15、検出部4、走査領域決定部11、及び送受信制御部17を有している。検出部4は、実空間上における穿刺針の先端の位置を検出する。走査領域決定部11は、被検体内の広域走査領域と、先端の位置に基づき第1の走査領域よりも狭い局所走査領域とを設定する。送受信制御部17は、送信部13と受信部15とを制御し、広域走査領域に対する第1の超音波走査と局所走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える。
【0079】
上記構成により、超音波診断装置1は、穿刺針を目標部位までガイドするための第1の超音波走査と、穿刺針の先端近傍の目標部位の組織情報を詳細に確認するための第2の超音波走査とを任意のタイミングで切替えることができる。また、第2の超音波走査は、走査領域が比較的狭いため、比較的、高空間分解能及び高時間分解能で目標部位を観察することができる。
【0080】
かくして本実施形態によれば、被検体内へ穿刺する針を利用した超音波検査の精度の向上を可能とする超音波診断装置及び超音波走査プログラムを提供することにある。
【0081】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0082】
1…超音波診断装置、2…超音波プローブ、2a…振動子、4…検出部、6…装置本体、11…走査領域決定部、13…送信部、15…受信部、17…送受信制御部、19…Bモード処理部、21…ドプラモード処理部、23…画像発生部、25…記憶部、27…表示部、29…入力部、31…システム制御部、100…穿刺針
【技術分野】
【0001】
本発明の実施形態は、超音波診断装置及び超音波走査プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブを体表から当てるだけの簡単な操作で心臓の拍動や胎児の動きの様子をリアルタイムで表示でき、かつ安全性が高い。そのため、超音波診断装置は、繰り返して検査が行える。また、超音波診断装置は、システムの規模がX線、CT、MRIなど他の診断機器に比べて小さく、片手で持ち運べる程度のものが開発されている。このような小型の超音波診断装置により、ベッドサイドへ移動して容易に検査を行うことができる。超音波診断装置は、X線などのように被曝がなく、産科や在宅医療等においても使用することができる。
【0003】
近年、静脈投与型の超音波造影剤が製品化され、「造影エコー法」が行われるようになってきている。この手法は、例えば、心臓および肝臓などの検査で静脈から超音波造影剤を注入して血流信号を増強し、血流動態の評価を行うことを目的としている。超音波造影剤の多くは微小気泡(マイクロバブル)が反射源として機能するものである。例えば、近年日本で発売されたソナゾイド(Sonazoid)と呼ばれる第二世代の超音波造影剤は、ペルフルオロブタン(perfluorobutane)ガスを内包し、リン脂質をシェル(shell)とする微小気泡であり、中低音圧の超音波で超音波造影剤の還流の様子を安定して観察することが可能になった。
【0004】
治療における超音波の応用も進んでいる。腫瘍組織の病理検査のためには、超音波ガイド下で針生検を行うことがある。さらに、肝臓がんなど限局性腫瘍のRFA(ラジオ波焼灼術:radio frequency ablation)治療のためのRFA針の穿刺や治療効果判定にも超音波診断装置が用いられている。近年はリアルタイム3次元スキャンも開発され、複数断面を観察しながら穿刺する場合もある。リアルタイム3次元スキャンは1次元アレイを機械的に揺動させるもの、2次元アレイで電子的に走査するものがある。これにより、穿刺断面のみならず、奥行き方向の針のずれも同時に観察できるようになった。
【0005】
穿刺後に針先周囲の3次元的な治療効果や組織情報を確認したいが、3次元スキャンは、空間分解能や時間分解能が2次元スキャンよりも劣る。また、針周囲の詳細な情報を解析するスキャン方法も確立されていない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006―314689号公報
【特許文献2】特開2006―305337号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
目的は、被検体内へ穿刺する針を利用した超音波検査の精度の向上を可能とする超音波診断装置及び超音波走査プログラムを提供することにある。
【課題を解決するための手段】
【0008】
本実施形態に係る超音波診断装置は、超音波を発生し、被検体からの超音波をエコー信号に変換する振動子と、前記振動子に駆動信号を供給する送信部と、前記振動子からのエコー信号を信号処理する受信部と、穿刺針の先端の位置を検出する検出部と、前記被検体内の第1の走査領域と、前記検出された先端の位置に基づき前記第1の走査領域よりも狭い第2の走査領域とを決定する決定部と、前記送信部と前記受信部とを制御し、前記第1の走査領域に対する第1の超音波走査と前記第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える送受信制御部と、を具備する。
【図面の簡単な説明】
【0009】
【図1】本実施形態に係る超音波診断装置の構成を示す図。
【図2】図1のシステム制御部の制御のもとに行われる、超音波検査の典型的な流れを示す図。
【図3】図1の穿刺針100の先端の現在位置を中心に含む局所走査領域の一例を示す図。
【図4】図1の穿刺針100の先端の予想到達位置を中心に含む局所走査領域の一例を示す図。
【図5】図1の送受信制御部により実行される第2の超音波走査の一例を示す図。
【図6】図1の送受信制御部により実行される第2の超音波走査の他の例を示す図。
【図7】図1の送受信制御部により実行される第2の超音波走査の他の例を示す図。
【図8】図1の送受信制御部により実行される第1の超音波走査と第2の超音波走査との切り替えを模式的に示す図。
【図9】図1の表示部による、超音波検査における画像の表示例を示す図。
【図10】図1の送受信制御部による、第2の超音波走査がSWEモードの場合の動作例を示す図。
【図11】図1の送受信制御部により実行される第1の超音波走査と第2の超音波走査との切り替えを模式的に示す他の図。
【図12】変形例1に係る送受信制御部による局所走査領域の決定処理を説明するための図。
【図13】変形例2に係る送受信制御部による局所走査領域の決定処理を説明するための図。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら本実施形態に係わる超音波診断装置及び超音波走査プログラムを説明する。
【0011】
図1は、本実施形態に係る超音波診断装置1の構成を示す図である。図1に示すように、超音波診断装置1は、超音波プローブ2、検出部4、及び装置本体6を有している。装置本体6は、走査領域決定部11、送信部13、受信部15、送受信制御部17、Bモード処理部19、ドプラモード処理部21、画像発生部23、記憶部25、表示部27、入力部29、及びシステム制御部31を有している。装置本体6に内蔵される送信部13及び受信部15等は、集積回路などのハードウェアで構成されることもあるが、ソフトウェア的にモジュール化されたソフトウェアプログラムである場合もある。以下、個々の構成要素の機能について説明する。
【0012】
超音波プローブ2は、2次元状に配列された複数の振動子2aを有している。振動子2aは、送信部13からの駆動信号に応じて超音波を発生し、被検体からの反射波を電気信号(エコー信号)に変換する。複数の振動子2aの前方側には、振動子2aと被検体との間の音響インピーダンス差を整合するための整合層が取り付けられている。複数の振動子の後方側には、超音波の伝播を防止するバッキング材が取り付けられている。振動子2aから被検体に超音波が送信されると、超音波は、体内組織の音響インピーダンスの不連続面で次々と反射される。反射された超音波は、振動子2aによりエコー信号として受信される。このエコー信号の振幅は、超音波が反射された不連続面における音響インピーダンスの差に依存する。また、超音波が血流や心臓壁等の表面で反射された場合は、エコー信号は、ドプラ効果により移動体の超音波送信方向の速度成分に依存した周波数偏移を受ける。
【0013】
穿刺針100は、被検体の内部に刺入される針である。典型的には、超音波プローブ2には、穿刺針100のためのアダプタが取り付けられている。アダプタは、穿刺針100のガイドとして機能する。穿刺針100は、操作者によりアダプタを介して被検体内に刺入される。本実施形態に係る穿刺針としては、生検に利用される針やRFAに利用される針等の被検体内に刺入されるあらゆる針が適用可能である。
【0014】
検出部4は、穿刺針100の先端の位置を検出し、検出された位置に関するデータを生成する。穿刺針100の先端の位置に関するデータは、走査領域決定部11に供給される。
【0015】
走査領域決定部11は、第1の超音波走査のための第1の走査領域と第2の超音波走査のための第2の走査領域とを決定する。具体的には、走査領域決定部11は、操作者からの入力部29を介した指示に従って第1の走査領域を設定する。典型的には、第1の走査領域は、比較的広範囲な3次元領域に設定される。走査領域決定部11は、検出部4により検出された穿刺針100の先端の位置に基づいて第2の走査領域を決定する。第2の走査領域の決定方法は、大きく2つに大別される。第1の方法において第2の走査領域は、穿刺針100の先端の位置を略中心に含むように設定される。第2の方法において第2の走査領域は、穿刺針100の先端の予想到達位置を略中心に含むように設定される。第2の走査領域は、第1の走査領域よりも体積が狭い。以下の説明において、第1の走査領域を広域走査領域と呼び、第2の走査領域を局所走査領域と呼ぶことにする。
【0016】
送信部13は、図示しないトリガ発生回路、遅延回路およびパルサ回路等を有している。パルサ回路は、所定のレート周波数 fr Hz(周期;1/fr秒)で、送信超音波を形成するためのレートパルスを繰り返し発生する。遅延回路は、送信方向及び送信焦点位置に応じた遅延時間をチャンネル毎に各レートパルスに印加する。トリガ発生回路は、このレートパルスに基づくタイミングで、超音波プローブ2に駆動信号を印加する。駆動信号の印加により、遅延時間に応じた送信方向及び送信焦点位置に関する超音波送信ビームが超音波プローブ2から送信される。
【0017】
なお、送信部13は、送受信制御部17の指示に従って、送信周波数、送信駆動電圧等を瞬時に変更可能な機能を有している。特に送信駆動電圧の変更については、瞬間にその値を切り替え可能なリニアアンプ型の発信回路、又は複数の電源ユニットを電気的に切り替える機構によって実現される。
【0018】
受信部15は、図示していないアンプ回路、A/D変換器、ビームフォーマ等を有している。アンプ回路は、超音波プローブ2からのエコー信号をチャンネル毎に増幅する。A/D変換器は、増幅されたエコー信号にA/D変換を施す。ビームフォーマは、デジタルのエコー信号に、超音波受信ビームのビーム方向を決定するのに必要な遅延時間を受信焦点位置毎に印加し、遅延時間が与えられたエコー信号を加算する。この遅延加算により、超音波受信ビームに対応する受信信号が生成される。
【0019】
送受信制御部17は、操作者からの入力部29を介した指示に応じた超音波走査を実行するために送信部13と受信部15とを制御する。具体的には、送受信制御部17は、広域走査領域に対する第1の超音波走査と局所走査領域に対する第2の超音波走査とを実行する。第1の超音波走査の映像モードと第2の超音波走査の映像モードとは、操作者により入力部29を介して任意に設定可能である。本実施形態に係る映像モードとしては、Bモードやドプラモード、エラストグラフィーモード、ウォールモーショントラッキング(WMT)モード、造影モード、空間コンパウンドモード、シアウェーブ・エラストグラフィ(SWE:shear wave elastography)モード、合成開口モード等の既存のあらゆる映像モードが適用可能である。送受信制御部17は、送信部13と受信部15とを制御し、広域走査領域に対する第1の超音波走査と局所走査領域に対する第2の超音波走査とを、操作者からの入力部29を介した指示に従って切替える。
【0020】
Bモード処理部19は、受信部15からの受信信号に対数増幅や包絡線検波処理などを施し、信号強度が輝度の明るさで表現されるBモードデータを生成する。Bモード処理部19は、超音波走査の映像モードがBモードの場合に作動される。Bモードデータは、画像発生部23に供給される。
【0021】
ドプラモード処理部21は、受信部15からの受信信号に周波数解析を施し、ドプラ効果による血流や組織、造影剤エコー成分を抽出し、平均速度、分散、パワー等の血流情報をカラーで表現するドプラデータを生成する。ドプラモード処理部21は、超音波走査の映像モードがドプラモードの場合に作動される。ドプラデータは、画像発生部23に供給される。
【0022】
画像発生部23は、Bモード処理部23からのBモードデータあるいはドプラ処理部24からのドプラデータに基づいて、第1の超音波走査が実行されている場合、広域走査領域に関し第1の超音波走査の映像モードに応じた超音波画像のデータを発生する。また、画像発生部23は、Bモードデータあるいはドプラデータに基づいて、第2の超音波走査が実行されている場合、局所走査領域に関し第2の超音波走査の映像モードに応じた超音波画像のデータを発生する。具体的には、画像発生部23は、Bモードデータあるいはドプラデータに基づいて、ピクセルから構成される2次元の画像データ、または、ボクセルから構成されるボリュームデータを発生する。画像発生部23は、ボリュームデータに基づいて3次元画像処理を施し、2次元の画像データを発生する。本実施形態に係る3次元画像処理としては、ボリュームレンダリング、多断面変換表示(MPR:multi planar reconstruction)、最大値投影表示(MIP:maximum intensity projection)等が適用可能である。例えば、画像発生部23は、映像モードがBモードの場合、Bモードデータに基づいてBモード画像を発生する。また、画像発生部23は、映像モードがドプラモードの場合、ドプラデータに基づいてドプラ画像を発生する。画像発生部23は、映像モードがエラストグラフィーモードまたはSWEモードの場合、ドプラデータに基づいて、被検体の硬さ情報の空間分布を表現するエラスト画像を発生する。画像発生部23は、映像モードがWMTモードの場合、ドプラデータに基づいて、臓器の運動機能情報の空間分布を表現するWMT画像を発生する。画像発生部23は、映像モードが造影モードの場合、生成部23は、超音波造影剤からの信号成分が特異的に描出される造影画像を発生する。なお、画像発生部23に供給される前のデータは、「生データ」と呼ばれることがある。
【0023】
記憶部25は、画像発生部23により生成された超音波画像のデータを記憶する。また、記憶部25は、本実施形態に係る超音波検査のための制御プログラムを記憶している。
【0024】
表示部27は、画像発生部23により生成された超音波画像を表示機器に表示する。表示機器としては、例えばCRTディスプレイや、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等が適用可能である。
【0025】
入力部29は、操作者からの各種指示を装置本体6にとりこむための入力機器を搭載している。例えば、入力部29は、操作者からの指示に従って第1の超音波走査と第2の超音波走査との切り替え指示を入力する。入力機器としては、トラックボール、各種スイッチ、ボタン、マウス、キーボード等が適用可能である。
【0026】
システム制御部31は、情報処理装置(計算機)としての機能を持ち、超音波診断装置1の動作を制御する。システム制御部31は、記憶部25から本実施形態に係る超音波検査のための制御プログラムを読み出し、この制御プログラムに従って各部を制御する。
【0027】
次に、システム制御部31の制御のもとに行われる本実施形態に係る超音波検査について、超音波ガイド下での針生検を例に挙げて説明する。図2は、システム制御部31の制御のもとに行われる、超音波検査の典型的な流れを示す図である。
【0028】
図2に示すように、システム制御部31は、操作者により入力部29を介して走査開始指示が入力されたことを契機として、実施例1に係る超音波走査を開始する。超音波走査時において、操作者は、針生検のための穿刺針を被検体内の目標部位に向けて挿入し始める。
【0029】
まず、システム制御部31は、送受信制御部17に第1の超音波走査を実行させる(ステップS1)。ステップS1において送受信制御部17は、広域走査領域に対して第1の超音波走査を実行するために、送信部13と受信部15とを制御する。第1の超音波走査は、穿刺針を目標部位に到達させるためのガイドとして利用される。従って、第1の超音波走査の映像モードは、典型的には、被検体内の形態情報を描出可能なBモードに設定される。また、広域走査領域は、3次元状の領域に設定される。広域走査領域は、第1の超音波走査の開始前に、走査領域決定部11により、操作者により入力部29を介した指示に従って設定されている。Bモードスキャンにおいては、送信部13は、送受信制御部17により制御のもと、広域走査領域を超音波で繰り返し走査するように超音波プローブ2から超音波を送信させる。受信部15は、送受信制御部17による制御のもと、超音波ビーム毎に受信信号を生成する。そしてBモード処理部19は、生成された受信信号にBモード処理を施し、Bモードデータを生成する。そして画像発生部23は、生成されたBモードデータに基づいて広域走査領域に関するボリュームデータを生成し、生成されたボリュームデータに基づく所定のBモード画像を生成する。典型的には、ステップS1のBモードスキャンにおいて生成されるBモード画像としては、A断面に関する断面画像とB断面に関する断面画像とが挙げられる。なお、A断面は、通常の断面、すなわち、超音波の走査面であり、B断面は、A断面を中心軸(走査面のステアリング角度0度の走査線に対応)回りに90度だけ回転させた面である。操作者は、表示部27により表示されているA断面に関する断面画像とB断面に関する断面画像とを観察しながら、穿刺針100を目標部位に向けて挿入する。
【0030】
なお、ステップS1において生成されるBモード画像としては、A断面に関する断面画像とB断面に関する断面画像とに限定されない。例えば、A断面及びB断面以外の断面に関する断面画像であってもよい。また、Bモード画像としては、断面画像のみに限定されず、ボリュームレンダリングにより生成されるボリュームレンダリング画像、画素値投影処理により生成される投影画像であってもよい。
【0031】
超音波検査時において検出部4は、検出処理を繰り返し実行している。検出部4は、実空間上における穿刺針の先端の位置を検出する。例えば、検出部4は、穿刺針100の先端に取り付けられた位置センサにより実現される。位置センサは、磁気や光などにより実空間上の位置を検出可能なセンサである。この場合、検出部4は、一定時間毎に穿刺針100の先端の位置を検出し、検出された位置のデータを装置本体6に送信する。また、システム制御部31は、超音波検査時において走査領域決定部11に決定処理を行わせる。
【0032】
なお、検出部4による穿刺針の先端の位置の検出方法は、位置センサを利用する方法のみに限定されない。例えば、検出部4は、穿刺針が描出された超音波画像を画像処理することにより穿刺針の先端の位置を検出しても良い。具体的には、検出部4は、穿刺針の先端の輝度値や穿刺針の形状を利用して超音波画像から穿刺針の先端領域を検出することができる。画像処理による穿刺針の先端の位置を検出する場合、検出部4は、装置本体6に設けられていると良い。
【0033】
ステップ1において走査領域決定部11は、検出部4により検出された穿刺針100の先端の位置に基づいて局所走査領域を決定する。局所走査領域は、広域走査領域よりも体積が小さければ、2次元状であっても3次元状であってもよい。局所走査領域の中心は、穿刺針100の先端の現在位置に一致される。
【0034】
図3は、穿刺針100の先端100aの現在位置を中心に含む局所走査領域R2の一例を示す図である。図3に示すように、局所走査領域R2が断面(走査面)の場合、走査面は、穿刺針100の先端100aの現在位置を中心に含み、且つ、穿刺針100に直交するように設定される。
【0035】
なお、上述のように局所走査領域の中心は、穿刺針100の先端の現在位置ではなく、穿刺針100の先端の予想到達位置に一致していても良い。図4は、穿刺針100の先端100aの予想到達位置100bを中心に含む局所走査領域R2の一例を示す図である。図4に示すように、局所走査領域R2が断面(走査面)の場合、走査面は、穿刺針100の先端100aの予想到達位置100bを中心に含み、且つ、先端100aの予測経路100cに直交するように設定される。予想到達位置100bは、検出部4により検出された先端100aの現在位置と穿刺針100の刺入角度αとに基づいて走査領域決定部11により決定される。刺入角度αは、既存の如何なる方法により計算されてもよい。例えば、刺入角度αは、穿刺針100の先端100aに設けられた位置センサからの位置データと穿刺針100の根本に設けられた位置センサ(図示せず)からの位置データとに基づいて走査領域決定部11により算出される。なお走査領域決定部11は、超音波画像上に描出された穿刺針領域を利用して刺入角度を算出しても良い。走査領域決定部11は、先端100aの現在位置と刺入角度とに基づいて予測経路100cを算出する。そして走査領域決定部11は、予測経路100c上にあって先端100aの現在位置から所定距離だけ離れた点を予想到達位置100cに決定する。所定距離は、操作者により入力部29を介して任意に設定可能である。なお予測経路100cは、検出部4により繰り返し検出された先端100aの位置の軌跡に基づいて算出されても良い。
【0036】
なお、局所走査領域の大きさ及び形状は、入力部29を介して操作者により任意に調整可能である。局所走査領域は、走査領域決定部11によりリアルタイムに更新される。すなわち、走査領域決定部11は、超音波検査時において、穿刺針100の先端の位置に局所走査領域を追従させることができる。換言すれば、走査領域決定部11は、穿刺針100の先端の移動に連動して、局所走査領域の位置を変更する。
【0037】
ステップS1において表示部27は、検出部4により検出された穿刺針100の先端の位置を、第1の超音波走査に関する超音波画像上に重ねて表示してもよい。例えば、穿刺針100の先端の位置を示すマークや、穿刺針100の先端の位置を指し示す矢印等が重ねられるとよい。
【0038】
ステップS1が行われるとシステム制御部31は、入力部29により映像モードの切り替えが行われることを待機する(ステップS2)。操作者は、穿刺針100が目標部位に到達すると、生検のために採取組織の確認等を行う。採取組織の確認は、詳細な形態情報や機能情報等を利用して行われる。従って、広域走査領域のBモードスキャンでは、穿刺針先端近傍の採取組織等を高精度に確認することができないので、ステップS2において走査領域と映像モードとの切り替えが行われる。
【0039】
操作者は、装置本体等に設けられた切り替えボタンを押すことにより、走査領域と映像モードとの切り替えを行う。切り替えボタンが押されることにより、第1の超音波走査から第2の超音波走査に切替えられ、広域走査領域から局所走査領域に切替えられる。第2の超音波走査の映像モードは、第1の超音波走査の映像モードと同じでも異なっていても良い。第2の超音波走査の映像モードは、予め入力部29を介して登録されていても、切り替え時に入力部29を介して選択されてもどちらでもよい。
【0040】
ステップS2において映像モードの切り替えが行われない場合(ステップS2:NO)、システム制御部31は、第1の超音波走査を繰り返す。
【0041】
そしてステップS2において映像モードの切り替えが行われた場合(ステップS2:YES)、システム制御部31は、送受信制御部17に第2の超音波走査を行わせる(ステップS3)。ステップS3において送受信制御部17は、走査領域決定部11により設定された局所走査領域に対して第2の超音波走査を実行するように、送信部13と受信部15とを繰り返す。画像発生部23は、第2の超音波走査の実行時において、第2の超音波走査に応じた超音波画像を生成し、表示部27は、生成された超音波画像を表示する。なお、第2の超音波走査時においても検出部4と走査領域決定部11とは繰り返し作動している。すなわち、第2の超音波走査時においても走査領域決定部11により局所走査領域が穿刺針100の先端の位置に追従される。画像発生部23は、経時的に変化する穿刺針100の先端の位置または予想到達位置を含む超音波画像を繰り返し発生する。表示部27は、繰り返し発生される超音波画像を即時的に表示する。このような超音波画像は、穿刺針100の先端の位置または予想到達位置を視点とし穿刺ラインを視線とする画像であるといえる。すなわち、表示部7は、疑似的に穿刺針100の先端に身を置いたような臨場感を操作者に与えることができる。
【0042】
ステップS3において表示部27は、検出部4により検出された穿刺針100の先端の位置または予想到達位置を、第2の超音波走査に関する超音波画像I2上に重ねて表示してもよい。例えば、穿刺針100の先端の位置を示すマークや、穿刺針100の先端の位置を指し示す矢印等が重ねられるとよい。
【0043】
ここで、第2の超音波走査について詳細に説明する。なお、以下の説明において局所走査領域は、穿刺針100の先端の現在位置を中心に含む場合にも、穿刺針100の先端の予想到達位置を中心に含む場合にも適用可能である。しかしながら、説明の煩雑さを低減するため、局所走査領域は、穿刺針100の先端の現在位置を中心に含むものとする。
【0044】
図5は、第2の超音波走査の一例を示す図である。図5に示すように、第1の超音波走査の広域走査領域R1は、第1の超音波走査が穿刺針100のガイドとして利用されるので、比較的広範囲な3次元領域に設定される。このため、第1の超音波走査(3次元走査)のフレームレート(時間分解能)は、リアルタイム性に劣る場合がある。また、ボリュームデータに基づく断面画像は、2次元走査によるBモード画像に比して空間分解能が劣る。
【0045】
一方、図5に示すように、第2の超音波走査の局所走査領域R2は、第2の超音波走査が穿刺針100の先端100a近傍における組織の観察に利用されるので、比較的狭い範囲に設定される。例えば、局所走査領域R2は、図5に示すように、穿刺針100の先端100aの位置を中心に含む走査面(断面)に設定される。このように走査領域を穿刺針の先端近傍の2次元領域に限定することで、第2の超音波走査における時間分解能及び空間分解能を、第1の超音波走査よりも向上させることができる。局所走査領域R2は、例えば、穿刺針100の先端100a近傍の組織の視認性向上等のため、穿刺ラインに対して直交するように設定されるとよい。この際、走査面(局所走査領域R2)の向きは、穿刺針100の刺入角度に基づいて設定される。なお、走査面(局所走査領域R2)は、穿刺ラインに対して如何なる角度に設定されてもよい。設定された局所走査領域R2の位置及び向きに応じて、送受信制御部17は、超音波プローブ2に搭載されている振動子の中から、超音波送信に利用する振動子2aを選択する。そして、送信部13は、選択された振動子2aを利用して局所走査領域に超音波を送信する。
【0046】
なお、局所走査領域R2は、穿刺針100の先端100a近傍の穿刺ラインに直交する断面であるとした。しかしながら、本実施形態はこれに限定されない。局所走査領域R2は、例えば、先端100a近傍の3次元領域や、穿刺針100を含む任意の複数断面でも良い。さらに、穿刺針100の移動に連動して、局所走査領域R2と超音波送信に利用する振動子2aとを追従させることもできる。
【0047】
図6は、第2の超音波走査の他の例を示す図であり、2次元的な局所走査領域R2に対する2次元的な空間コンパウンドを利用した超音波走査を示す図である。空間コンパウンドにおいて送信部13は、送受信制御部17の制御のもと、2次元的な局所走査領域(走査面)R2を偏向走査する。超音波送信に利用される振動子2aは、局所走査領域(走査面)R2に交差し、一列に配列された複数の振動子である。また、図7は、第2の超音波走査の他の例を示す図であり、局所走査領域R2に対する3次元的な空間コンパウンドを利用した超音波走査を示す図である。超音波送信に利用される振動子2aは、局所走査領域(走査面)R2に交差する一列の振動子とこの一列の振動子に隣接する振動子とからなる2次元状に配列された複数の振動子である。
【0048】
図6および図7に示すように、第2の超音波走査は、空間コンパウンドを利用した超音波走査でもよい。偏向走査により2次元状の局所走査領域に対して複数の送信方向にそれぞれ対応する複数の超音波送信が実行される。画像発生部23は、複数の超音波送信の各々について、局所走査領域R2に関するBモード画像を生成する。そして画像発生部23は、複数の超音波送信にそれぞれ対応する複数のBモード画像を合成し、単一のBモード画像(合成画像)を生成する。表示部27は、生成された合成画像を表示する。この合成画像は、単一の送信方向に関する超音波走査のBモード画像に比して、空間コンパウンドの効果により画質が向上している。従って、第2の超音波走査として空間コンパウンドを利用した超音波走査が実行されることにより、操作者は、穿刺針の先端近傍の組織を高画質の超音波画像を観察することができる。
【0049】
上述のように、送受信制御部17は、操作者からの入力部29を介した指示に従って、第1の超音波走査と第2の超音波走査とを切り替える。図8は、第1の超音波走査と第2の超音波走査との切り替えを模式的に示す図である。図8に示すように、例えば、第1の超音波走査としては、通常のBモードボリュームスキャンが適用され、第2の超音波走査としては、穿刺針100の先端100a近傍への限局的なBモードスキャンが適用される。第1の超音波走査においては、超音波プローブ2に含まれる全ての振動子2bが超音波送信に利用され、第2の超音波走査においては、上述したように、超音波プローブ2内の一部の振動子2aが超音波送信に利用される。入力部29は、第1の超音波走査と第2の超音波走査とを瞬時に切替えるユーザインターフェース(U/I)を有している。このユーザインターフェースが操作者により操作されることにより、通常のBモードボリュームスキャンと先端100a近傍への限局的なスキャンとが送受信制御部17により瞬時に切替えられる。
【0050】
図9は、超音波検査における画像の表示例を示す図である。図9に示すように、表示部27は、第2の超音波走査の実行時において、第1の超音波走査に関する超音波画像I1と第2の超音波走査に関する超音波画像I2とを並べて表示する。超音波画像I1は、第1の超音波走査時において生成された画像であり、静止画である。例えば、超音波画像I1は、Bモードボリュームスキャンにより画像発生部23により生成されたボリュームデータに基づく画像である。超音波画像I1の表示方法は、A断面等に関する断面画像、ボリュームレンダリングによるボリュームレンダリング画像、最大値投影(MIP)による投影画像が好適である。なお、表示される断面画像は、一枚であっても良いし、直交3断面等の複数断面であってもよい。超音波画像I2は、リアルタイムに生成される画像であり、動画である。例えば、超音波画像I2は、Bモードスキャンにより画像発生部23により生成された、2次元の局所走査領域に関するBモード画像である。従って、超音波画像I2は、超音波画像I1に比して時間分解能及び空間分解能が良い。なお、第2の超音波走査における超音波画像I2の表示方法は上述の方法のみに限定されない。例えば、超音波画像I1に超音波画像I2を重ねて表示してもよい。また、超音波画像I2のみを表示してもよい。
【0051】
なお、第2の超音波走査の映像モードは、一種類に限定されない。例えば、第2の超音波走査の映像モードとして、複数種類の映像モードが設定されてもよい。すなわち、第2の超音波走査の映像モードは、Bモードやドプラモード、エラストグラフィーモード、ウォールモーショントラッキング(WMT)モード、造影モード、SWEモード、空間コンパウンドモード、合成開口モードのうちの少なくとも2種類であってもよい。第2の超音波走査において、複数種類の映像モードにそれぞれ対応する複数種類の超音波走査が、送受信制御部17の制御のもと、所定回数の超音波送受信おきに交互に繰り返される。この場合、図9の超音波画像I2は、第1の映像モードに関する超音波画像と第2の映像モードに関する超音波画像との重ね合わせ画像となる。例えば、第2の超音波走査において、Bモードスキャンとドプラモードスキャンとが交互に繰り返されてもよい。この場合、超音波画像I2は、Bモード画像とドプラ画像との重ね合わせ画像となる。より詳細には、超音波画像I2において、Bモードスキャン時にBモード画像が更新され、ドプラモードスキャン時にドプラ画像が更新される。この表示により、操作者は、形態情報と血流情報とをリアルタイムで同時に観察することができる。
【0052】
第2の超音波走査に関する超音波画像I2に対して、画質向上のための種々の画像処理を適用してもよい。例えば、特許文献2に記載の微小構造物を抽出する処理を、空間コンパウンドに基づく超音波画像I2に適用することも可能である。乳腺の臨床応用の場合、微細石灰化領域の組織を採取して、病理検査にて良性/悪性を診断するケースがある。Bモードボリュームスキャンだけでは、穿刺針が所望の石灰化領域に挿入されたか確認が難しいが、針先近傍で、上記処理を適用することで、確認が容易になる。なお、特許文献2に記載の画像処理を空間コンパウンドに基づく超音波画像I2に適用することで、超音波画像I2に含まれる微小構造物の抽出能が向上することが知られている。
【0053】
また、第2の超音波走査の映像モードは、Bモードのみに限定されない。第2の超音波走査の映像モードとしては、上述のように、エラストグラフィーモードや、ドプラモード、造影モードなども適用可能である。例えば、エラストグラフィーモードの場合、操作者は、超音波プローブ2で被検体を圧迫して解放する。ドプラモード処理部19は、圧迫と開放とに起因する組織の速度情報の空間分布を算出する。画像発生部23は、算出された速度情報の空間分布に基づいて硬さ情報の空間分布を算出し、算出された硬さ情報の空間分布をカラーで表現するエラストグラフィー画像を生成する。表示部27は、生成されたエラストグラフィー画像を表示する。
【0054】
また、第2の超音波走査の映像モードは、SWEモードでも良い。SWEモードは、走査領域内でのシェアウェーブの伝搬速度が組織の硬さに依存していることを利用した撮像方法である。以下、図10を参照しながら、第2の超音波走査がSWEモードの場合について詳細に説明する。第1の超音波走査の実行中、操作者は、入力部29を介して第1の超音波走査から第2の超音波走査への切替指示を入力する。切替指示が入力されることを契機としてシステム制御部31は、第1の超音波走査から第2の超音波走査に切り替える。第2の超音波走査において送受信制御部17は、局所走査領域に対してSWE走査を実行する。局所走査領域は、断面であっても3次元領域であっても良い。しかしながら、以下の説明において局所走査領域は断面であるとする。
【0055】
まず、送受信制御部17は、送信部13にプッシュパルスと呼ばれる高圧超音波パルスP1を送信させる。具体的には、送信部13は、所定の送信焦点位置に集束されるプッシュパルスP1を局所走査領域R2の方位方向に関する端部に送信する。送信部13は、深さ方向に沿って送信焦点位置を切り替えながらプッシュパルスP1を繰り返し送信する。プッシュパルスP1が送信されると局所走査領域R2内には、剪断波が発生する。剪断波は、横波である。剪断波が局所走査領域R2内を伝搬することにより局所走査領域P1内の組織が歪む。剪断波による組織の歪みの度合いは組織の硬さに依存する。
【0056】
プッシュパルスP1が送信されると送受信制御部17は、剪断波の伝搬計測モードを実行する。具体的には、送受信制御部17は、送信部13を制御して局所走査領域R2の全体に亘って剪断波計測のためのトラッキングパルスUWを繰り返し送信し、受信部15を制御して局所走査領域R2からの超音波を繰り返し受信する。より詳細には、送受信制御部17は、プッシュパルスP1の送信位置から所定距離L1だけ離れた観察領域T1に対して、トラッキングパルスUWを複数回繰り返し送受信する。観察領域T1は、局所走査領域R2の部分領域である。トラッキングパルスUWは、観察領域T1内の組織の変位量と変位を生じた時刻とを観察するための超音波パルスである。ドプラモード処理部21は、受信部15からの受信信号に自己相関演算を施して観察領域T1に関する組織の変位の空間分布を繰り返し算出する。画像発生部23は、異なる時刻に関する組織の変位の空間分布に基づいて観察領域T1に関する剪断波の到達時間の空間分布を算出する。剪断波の到達時間は、基準時刻からの、組織の変位量が最大となる時間に対応する。基準時刻は、例えば、プッシュパルスの送信時刻に規定される。
【0057】
プッシュパルス送信位置から所定距離L1だけ離れた位置のトラッキングパルスUWの送信が行われると、送受信制御部17は、再びプッシュパルスP1を送信し、次は所定距離L2だけ離れた観察領域T2に対して、トラッキングパルスUWを繰り返し送受信する。観察領域T2は、局所走査領域R2の部分領域である。これにより、画像発生部23は、観察領域T1に対して行った走査と同様に、観察領域T2についての剪断波の到達時間の空間分布を算出する。
【0058】
このようにして、全ての局所走査領域R2の全体に亘ってトラッキングパルスUWが送信されると、画像発生部23は、組織の硬さをカラーで表現するSWE画像を発生する。ここで、剪断波の伝搬速度と組織の硬さとは一定の比例関係にあることが知られている。すなわち、剪断波の伝搬速度が速い領域は、弾性率が高く、硬い領域である。剪断波の伝搬速度が遅い領域は、弾性率の低く、柔らかい領域である。画像発生部23は、この比例関係に従って、局所走査領域R2に関する到達時間の空間分布に基づいて組織の硬さの空間分布を算出する。そして、画像発生部23は、組織の硬さをカラーで表現するSWE画像を発生する。表示部27は、SWE画像を表示する。
【0059】
なお、上述の動作では観察領域をずらしながら、各観察領域についてプッシュパルス送信とトラッキングパルス送受信とを順番に行う動作について説明したが、種々のバリエーションがあってもよい。例えば、トラッキングパルスは送信ビーム1本に対して複数の受信ビームを形成し、観察領域を広げるような、所謂並列同時受信の手法を利用してもよい。
【0060】
なお、SWE画像の精度の向上のため、異なるプッシュパルス送信位置に関する二つのSWE画像に基づく合成画像が表示されても良い。この場合、送受信制御部17は、上述と同様の方法により、第1のSWE走査と第2のSWE走査とを交互に繰り返す。すなわち、送受信制御部17は、第1のSWE走査において、送信部13を制御して局所走査領域R2の一端部に向けてプッシュパルスを送信し、送信部13と受信部15とを制御して局所走査領域R2全体に亘って剪断波の伝搬計測モード走査を実行する。そして、ドプラモード処理部21は、受信部15からの受信信号に自己相関演算を施して組織の変位の空間分布を算出し、画像発生部23は、組織の変位の空間分布に基づいて第1のSWE画像を発生する。第2のSWE走査において送受信制御部17は、送信部13を制御して局所走査領域R2の他端部に向けてプッシュパルスを送信し、送信部13と受信部15とを制御して局所走査領域R2全体に亘って剪断波の伝搬計測モード走査を実行する。そして、ドプラモード処理部21は、受信部15からの受信信号に自己相関演算を施して組織の変位の空間分布を算出し、画像発生部23は、組織の変位の空間分布に基づいて第2のSWE画像を発生する。
【0061】
第1のSWE走査と第2のSWE走査とは交互に繰り返される。第1のSWE画像と第2のSWE画像とが発生されると画像発生部23は、第1のSWE画像と第2のSWE画像との合成画像を発生する。表示部27は、合成画像を表示する。操作者は、合成画像を観察することによって組織の硬さをより正確に評価することができる。
【0062】
なお上述のSWE走査において局所走査領域は断面であるとした。しかしながら、本実施形態に係るSWE走査における局所走査領域は3次元領域であっても良い。
【0063】
ステップS3が行われるとシステム制御部31は、操作者により入力部29を介して超音波走査の終了指示がなされることを待機している(ステップS4)。ステップS3が行われると操作者は、第2の超音波走査による超音波画像を観察し、目的部位に穿刺針の先端が到達したか否かを判断する。到達したと判断した場合、操作者は、組織採取等を行う。そして、生検が終了すると操作者は、入力部29等を介して超音波検査の終了指示を入力する。
【0064】
このようにしてステップS4において終了指示がなされた場合(ステップS4:YES)、システム制御部31は、超音波検査を終了する。
【0065】
なお本実施形態の臨床応用例は、針生検のみに限定されない。本実施形態は、肝がんなどの限局性腫瘍に対するラジオ波焼灼術、すなわち、RFA治療等の穿刺針を利用した如何なる超音波診断にも適用可能である。RFA治療は、表面に高温を発生するための電極が取り付けられた穿刺針(電極針)を利用する。より詳細には、RFA治療は、電極針を体表から腫瘍部に刺入し、ラジオ波により発生する高温により病変部を凝固死させる治療法である。近年では、RFA治療の効果判定に造影超音波が利用されることが多い。治療前は腫瘍血管により血流が豊富であるが、治療後はがん細胞が死滅し、血流が減少するためである。3次元的に分布する腫瘍の治療効果を判定するためにリアルタイム3次元超音波スキャンが有用であるが、リアルタイム3次元超音波スキャンは、2次元超音波スキャンに比べ時間分解能及び空間分解能が劣る。
【0066】
RFA治療の場合、図2のステップS1において、電極針が治療部位に向けて刺し入れられる。目標部位に電極針が到達すると、電極針による治療部位の焼灼が行われる。例えば、電極針は、治療装置に接続されている。腫瘍サイズやRFA針の種類に応じて治療装置の出力強度や出力時間が設定される。そしてステップS2において第2の超音波走査の映像モードが選択される。映像モードとして、造影モード、ドプラモード、エラストグラフィーモードなどが選択される。治療により腫瘍血流の減少、組織変性に伴う硬さの変化を観察するのに適した映像モードが選択される。特に、造影モードでは造影剤流入の経時変化を観察する必要があるが、関心領域のみに限局された造影モードのため、時間分解能を高く維持できリアルタイム性も犠牲にならない。表示方法としては、複数断面表示、ボリウム表示を適宜選択可能である。なお、図11に示すように、Bモード3次元スキャンと局所走査領域に対する造影モードのスキャンとは瞬時に切替え可能である。ステップS3では、ステップS2で選択された映像モードで治療効果が行われる。腫瘍部分に血流が残存しているかなどが観察される。観察により、治療範囲が十分であれば終了、腫瘍部分の残存が認められれば、再びステップS1に戻り、電極針の穿刺または追加の治療が行われる。従って、本実施形態によれば、RFA治療効果判定の精度向上が実現する。
【0067】
このように、本実施形態に係る超音波診断装置1は、穿刺針を利用した超音波検査に有効な技術を提供している。
【0068】
以下、本実施形態に係る変形例について説明する。
【0069】
(変形例1)
上述の実施形態に係る局所走査領域は、穿刺針100の先端の現在位置または現在位置に応じた予想到達位置に従って決定されるものとした。この場合、穿刺針100の先端の現在位置の移動に連動して局所走査領域も移動することとなる。針生検やRFA治療中、目標部位を観察したいにもかかわらず穿刺針100が不用意に動いてしまう場合がある。穿刺針100の先端の現在位置に連動して局所走査領域の位置が決定される場合、目標部位等の観察対象部位から穿刺針100が引き抜かれると局所走査領域は当該目標部位から外れてしまう。従って操作者は、観察対象部位から穿刺針100がずれる毎に穿刺針100の位置を調整しなければならない。変形例1に係る局所走査領域は、予め記憶された過去の穿刺針100の先端の位置に基づいて決定される。以下、変形例1に係る超音波診断装置及び超音波撮像方法について説明する。なお以下の説明において、本実施形態と略同一の機能を有する構成要素については、同一符号を付し、必要な場合にのみ重複説明する。
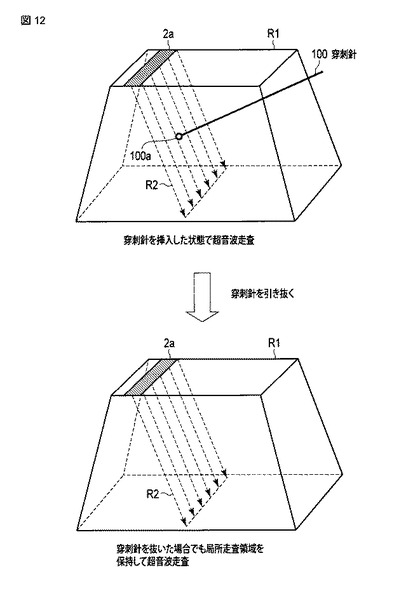
【0070】
図12は、変形例1に係る局所走査領域の決定処理について説明するための図である。図12に示すように、穿刺針100の挿入中、局所走査領域は、穿刺針100の先端の位置に連動して設定される。操作者は、局走査領域R2を固定させたい位置に穿刺針100の先端100aが到達したと判断すると、入力部29を介して記憶指示を入力する。例えば、操作者は、穿刺針100の先端が観察対象部位に到達したことを契機として記憶指示を入力する。記憶指示が入力されることを契機として記憶部25は、当該記憶指示が入力された時点における先端100aの位置データを記憶する。走査領域決定部11は、記憶部25に記憶されている位置データを読み出し、読み出された位置に基づいて局所走査領域を決定する。これにより局所走査領域は、穿刺針100が移動しても先端100aの位置に連動して動くことはなく固定されこととなる。なお、操作者が入力部29を介して連動指示がなされた場合、走査領域決定部11は、再び局所走査領域R2を穿刺針100の先端の現在位置に連動させる。
【0071】
上述の説明において、記憶指示が入力されることを契機として、即座に、記憶部25に記憶されている位置データに局所走査領域R2が設定され第2の超音波走査が実行されるものとした。しかしながら、本実施形態はこれに限定されない。すなわち、局所走査領域R2の記憶と超音波走査とが個別に行われても良い。例えば、操作者により入力部29を介して固定指示が入力されることを契機として走査領域決定部11は、記憶部25に記憶されている先端100aの位置データを読み出し、読み出された位置に基づいて局所走査領域R2を決定する。この場合、走査領域決定部11は、観察対象部位から穿刺針100が引き抜かれた後においても、観察対象部位に局所走査領域R2を設定することができる。
【0072】
従って、穿刺針100の先端位置と観察対象部位とがずれた場合においても、観察対象部位の観察を目的として穿刺針100を刺し直す手間を省くことができる。
【0073】
また、第2の超音波走査がSWEモードの場合、本実施形態に係る超音波診断装置は、穿刺針100を局所走査領域から引き抜いた状態でSWE走査を実行することができる。従って、変形例1によればSWEモードの精度の向上も実現する。
【0074】
(変形例2)
上述の実施形態に係る局所走査領域は、穿刺針100の先端の位置または先端の予想到達位置を含むものとした。しかしながら、本実施形態に係る局所走査領域は、これに限定されない。変形例2に係る局所走査領域は、穿刺針100の先端の現在位置に基づく予測経路に基づいて決定される。以下、変形例2に係る超音波診断装置及び超音波撮像方法について説明する。なお以下の説明において、本実施形態と略同一の機能を有する構成要素については、同一符号を付し、必要な場合にのみ重複説明する。
【0075】
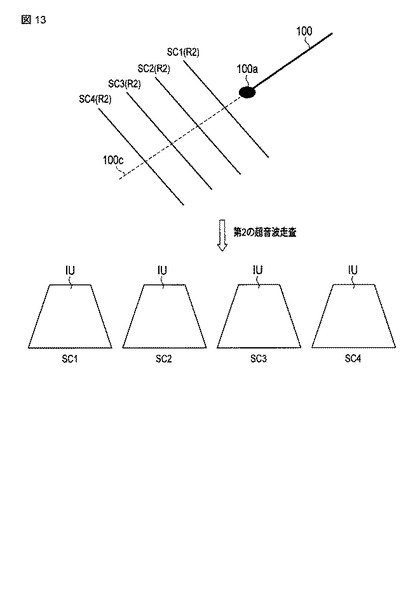
図13は、変形例2に係る局所走査領域R2の決定処理について説明するための図である。なお、変形例2に係る局所走査領域R2は断面SCであるものとする。図13に示すように、針生検等の実施中または実施前において、走査領域決定部11は、穿刺針100の予測経路100cを算出する。予測経路の算出方法は、上述の方法と同様なので、ここでの説明を省略する。予測経路100cが算出されると走査領域決定部11は、予測経路100cに直交する複数の断面SCをそれぞれ複数の局所走査領域R2に設定する。例えば、図13の場合、予測経路100cに直交する4つの断面SC1、SC2、SC3、SC4が設定される。
【0076】
第2の超音波走査への切替指示がなされることを契機として送受信制御部17は、複数の局所走査領域SC(R2)に対して順番に第2の超音波走査を施す。これにより画像発生部23は、複数の局所走査領域SC(R2)に関する複数の超音波画像IUを発生し、表示部27は、複数の超音波画像IUを表示する。複数の超音波画像IUは、並べて表示されても良いし、穿刺針100の先端に近い方から順番に表示されても良い。
【0077】
変形例2のように穿刺針100の予測経路に直交する複数の超音波画像を表示することにより、操作者は、予め穿刺針100の刺入経路を刺入前に観察することができる。従って、穿刺針100の刺入経路を刺入前に再検討することができ、穿刺針100の刺し直しを防止することができる。
【0078】
[効果]
上記の説明のように、本実施形態に係る超音波診断装置1は、少なくとも、超音波プローブ2、送信部13、受信部15、検出部4、走査領域決定部11、及び送受信制御部17を有している。検出部4は、実空間上における穿刺針の先端の位置を検出する。走査領域決定部11は、被検体内の広域走査領域と、先端の位置に基づき第1の走査領域よりも狭い局所走査領域とを設定する。送受信制御部17は、送信部13と受信部15とを制御し、広域走査領域に対する第1の超音波走査と局所走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える。
【0079】
上記構成により、超音波診断装置1は、穿刺針を目標部位までガイドするための第1の超音波走査と、穿刺針の先端近傍の目標部位の組織情報を詳細に確認するための第2の超音波走査とを任意のタイミングで切替えることができる。また、第2の超音波走査は、走査領域が比較的狭いため、比較的、高空間分解能及び高時間分解能で目標部位を観察することができる。
【0080】
かくして本実施形態によれば、被検体内へ穿刺する針を利用した超音波検査の精度の向上を可能とする超音波診断装置及び超音波走査プログラムを提供することにある。
【0081】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0082】
1…超音波診断装置、2…超音波プローブ、2a…振動子、4…検出部、6…装置本体、11…走査領域決定部、13…送信部、15…受信部、17…送受信制御部、19…Bモード処理部、21…ドプラモード処理部、23…画像発生部、25…記憶部、27…表示部、29…入力部、31…システム制御部、100…穿刺針
【特許請求の範囲】
【請求項1】
超音波を発生し、被検体からの超音波をエコー信号に変換する振動子と、
前記振動子に駆動信号を供給する送信部と、
前記振動子からのエコー信号を信号処理する受信部と、
穿刺針の先端の位置を検出する検出部と、
前記被検体内の第1の走査領域と、前記検出された先端の位置に基づき前記第1の走査領域よりも狭い第2の走査領域とを決定する決定部と、
前記送信部と前記受信部とを制御し、前記第1の走査領域に対する第1の超音波走査と前記第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える送受信制御部と、
を具備する超音波診断装置。
【請求項2】
前記第1の超音波走査が実行されている場合、前記受信部からの出力信号に基づいて前記第1の走査領域に関する第1の超音波画像を発生し、前記第2の超音波走査が実行されている場合、前記受信部からの出力信号に基づいて前記第2の走査領域に関する第2の超音波画像を発生する発生部と、
前記第1の超音波画像と前記第2の超音波画像とを表示する表示部と、
をさらに備える請求項1記載の超音波診断装置。
【請求項3】
前記表示部は、前記第2の超音波画像に前記検出された先端の位置を重ねて表示する、請求項2記載の超音波診断装置。
【請求項4】
前記表示部は、前記第1の超音波画像と前記第2の超音波画像とを重ねて、または、並べて表示する、請求項2記載の超音波診断装置。
【請求項5】
前記第2の走査領域は、3次元空間または断面である、請求項1記載の超音波診断装置。
【請求項6】
前記第1の超音波走査は、Bモードである、請求項1記載の超音波診断装置。
【請求項7】
前記第2の超音波走査は、空間コンパウンドである、請求項1記載の超音波診断装置。
【請求項8】
前記第2の超音波走査は、エラストグラフィーモード、ドプラモード、造影モード、または、シアウェーブエラストグラフィーモードである、請求項1記載の超音波診断装置。
【請求項9】
前記決定部は、前記穿刺針の先端に前記第2の走査領域を追従させる、請求項1記載の超音波診断装置。
【請求項10】
前記決定部は、操作者からの指示に従って、前記第2の走査領域の範囲を調整する、請求項1記載の超音波診断装置。
【請求項11】
第2の超音波走査は、Bモード、ドプラモード、エラストグラフィーモード、造影モード、空間コンパウンド、及びシアウェーブエラストグラフィーモードのうちの少なくとも2つの映像モードであり、
前記送受信制御部は、前記少なくとも2つの映像モードを所定回数の超音波送受信おきに交互に繰り返す、
請求項1記載の超音波診断装置。
【請求項12】
前記決定部は、前記検出された先端の位置を略中心に含むように前記第2の走査領域を設定する、請求項1記載の超音波診断装置。
【請求項13】
前記決定部は、前記検出された先端の予想到達位置を略中心に含むように前記第2の走査領域を設定する、請求項1記載の超音波診断装置。
【請求項14】
前記検出された先端の位置を記憶する記憶部をさらに備え、
前記決定部は、操作者からの指示に従って前記記憶部から前記記憶された先端の位置を読み出して、前記読み出された先端の位置を略中心に含むように前記第2の走査領域を設定する、
請求項1記載の超音波診断装置。
【請求項15】
前記決定部は、前記検出された先端の予測経路に直交する複数の断面のそれぞれを複数の第2の走査領域に決定する、請求項1記載の超音波診断装置。
【請求項16】
発生部と表示部とをさらに備え、
前記送受信制御部は、前記複数の第2の走査領域を個別に超音波で走査するように前記送信部と前記受信部とを制御し、
前記発生部は、前記受信部からの出力信号に基づいて前記複数の第2の走査領域に関する複数の超音波画像を発生し、
前記表示部は、前記複数の超音波画像を表示する。
請求項15記載の超音波診断装置。
【請求項17】
コンピュータに、
超音波プローブに内蔵された振動子に駆動信号を供給する機能と、
前記振動子からのエコー信号を信号処理する機能と、
前記超音波プローブに取り付けられた穿刺針の先端の位置を検出する機能と、
被検体内の第1の走査領域と、前記検出された先端の位置に基づき前記第1の走査領域よりも狭い第2の走査領域とを決定する機能と、
前記第1の走査領域に対する第1の超音波走査と前記第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える機能と、
を実現させる超音波走査プログラム。
【請求項1】
超音波を発生し、被検体からの超音波をエコー信号に変換する振動子と、
前記振動子に駆動信号を供給する送信部と、
前記振動子からのエコー信号を信号処理する受信部と、
穿刺針の先端の位置を検出する検出部と、
前記被検体内の第1の走査領域と、前記検出された先端の位置に基づき前記第1の走査領域よりも狭い第2の走査領域とを決定する決定部と、
前記送信部と前記受信部とを制御し、前記第1の走査領域に対する第1の超音波走査と前記第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える送受信制御部と、
を具備する超音波診断装置。
【請求項2】
前記第1の超音波走査が実行されている場合、前記受信部からの出力信号に基づいて前記第1の走査領域に関する第1の超音波画像を発生し、前記第2の超音波走査が実行されている場合、前記受信部からの出力信号に基づいて前記第2の走査領域に関する第2の超音波画像を発生する発生部と、
前記第1の超音波画像と前記第2の超音波画像とを表示する表示部と、
をさらに備える請求項1記載の超音波診断装置。
【請求項3】
前記表示部は、前記第2の超音波画像に前記検出された先端の位置を重ねて表示する、請求項2記載の超音波診断装置。
【請求項4】
前記表示部は、前記第1の超音波画像と前記第2の超音波画像とを重ねて、または、並べて表示する、請求項2記載の超音波診断装置。
【請求項5】
前記第2の走査領域は、3次元空間または断面である、請求項1記載の超音波診断装置。
【請求項6】
前記第1の超音波走査は、Bモードである、請求項1記載の超音波診断装置。
【請求項7】
前記第2の超音波走査は、空間コンパウンドである、請求項1記載の超音波診断装置。
【請求項8】
前記第2の超音波走査は、エラストグラフィーモード、ドプラモード、造影モード、または、シアウェーブエラストグラフィーモードである、請求項1記載の超音波診断装置。
【請求項9】
前記決定部は、前記穿刺針の先端に前記第2の走査領域を追従させる、請求項1記載の超音波診断装置。
【請求項10】
前記決定部は、操作者からの指示に従って、前記第2の走査領域の範囲を調整する、請求項1記載の超音波診断装置。
【請求項11】
第2の超音波走査は、Bモード、ドプラモード、エラストグラフィーモード、造影モード、空間コンパウンド、及びシアウェーブエラストグラフィーモードのうちの少なくとも2つの映像モードであり、
前記送受信制御部は、前記少なくとも2つの映像モードを所定回数の超音波送受信おきに交互に繰り返す、
請求項1記載の超音波診断装置。
【請求項12】
前記決定部は、前記検出された先端の位置を略中心に含むように前記第2の走査領域を設定する、請求項1記載の超音波診断装置。
【請求項13】
前記決定部は、前記検出された先端の予想到達位置を略中心に含むように前記第2の走査領域を設定する、請求項1記載の超音波診断装置。
【請求項14】
前記検出された先端の位置を記憶する記憶部をさらに備え、
前記決定部は、操作者からの指示に従って前記記憶部から前記記憶された先端の位置を読み出して、前記読み出された先端の位置を略中心に含むように前記第2の走査領域を設定する、
請求項1記載の超音波診断装置。
【請求項15】
前記決定部は、前記検出された先端の予測経路に直交する複数の断面のそれぞれを複数の第2の走査領域に決定する、請求項1記載の超音波診断装置。
【請求項16】
発生部と表示部とをさらに備え、
前記送受信制御部は、前記複数の第2の走査領域を個別に超音波で走査するように前記送信部と前記受信部とを制御し、
前記発生部は、前記受信部からの出力信号に基づいて前記複数の第2の走査領域に関する複数の超音波画像を発生し、
前記表示部は、前記複数の超音波画像を表示する。
請求項15記載の超音波診断装置。
【請求項17】
コンピュータに、
超音波プローブに内蔵された振動子に駆動信号を供給する機能と、
前記振動子からのエコー信号を信号処理する機能と、
前記超音波プローブに取り付けられた穿刺針の先端の位置を検出する機能と、
被検体内の第1の走査領域と、前記検出された先端の位置に基づき前記第1の走査領域よりも狭い第2の走査領域とを決定する機能と、
前記第1の走査領域に対する第1の超音波走査と前記第2の走査領域に対する第2の超音波走査とを、操作者からの指示に従って切替える機能と、
を実現させる超音波走査プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−81764(P2013−81764A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−203040(P2012−203040)
【出願日】平成24年9月14日(2012.9.14)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年9月14日(2012.9.14)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]