
超音波診断装置及び関心領域設定用制御プログラム

【課題】先行する3次元画像データに対して設定された関心領域を新たに収集された3次元画像データに対して自動設定する。
【解決手段】超音波プローブ21を被検体150の体表面に沿って移動させることにより時系列的な3次元画像データを収集する際、位置座標処理部4は、関心領域が自動設定される現在時刻toに先行する時刻tmにて収集された3次元画像データImの検査対象部位に対し入力部7が設定した関心領域Rmの位置座標を超音波プローブ21の位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoにおける位置座標を算出する。次いで、表示部6は、画像データ生成部3から供給された3次元画像データIoの前記位置座標に関心領域Rmを重畳することにより3次元画像データIoに対する関心領域Rmの自動設定を行なう。
【解決手段】超音波プローブ21を被検体150の体表面に沿って移動させることにより時系列的な3次元画像データを収集する際、位置座標処理部4は、関心領域が自動設定される現在時刻toに先行する時刻tmにて収集された3次元画像データImの検査対象部位に対し入力部7が設定した関心領域Rmの位置座標を超音波プローブ21の位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoにおける位置座標を算出する。次いで、表示部6は、画像データ生成部3から供給された3次元画像データIoの前記位置座標に関心領域Rmを重畳することにより3次元画像データIoに対する関心領域Rmの自動設定を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、超音波診断装置及び関心領域設定用制御プログラムに係り、特に、超音波プローブを移動させながら被検体の画像データを時系列的に収集する際、現在時刻に先行する時刻にて収集された画像データに対して予め設定した関心領域を現在時刻の画像データに対して自動設定することが可能な超音波診断装置及び関心領域設定用制御プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに設けられた振動素子から発生する超音波を被検体内に放射し、被検体組織の音響インピーダンスの差異によって生ずる反射波を前記振動素子により受信して生体情報を収集するものであり、超音波プローブを体表面に接触させるだけの簡単な操作で2次元画像データや3次元画像データのリアルタイム表示が可能となるため、各種臓器の形態診断や機能診断に広く用いられている。
【0003】
3次元画像データの収集を目的とした従来の3次元走査では、複数の振動素子が1次元配列された超音波プローブをその配列方向に対して垂直な方向に移動あるいは回動させながら被検体の3次元領域に対して超音波を送受信し、このとき収集したボリュームデータ(3次元データ)をレンダリング処理することにより3次元画像データの生成が行なわれてきた。又、近年では、複数の振動素子が2次元配列された、所謂、2次元アレイ超音波プローブが実用化されている。この2次元アレイ超音波プローブにより3次元領域に対する超音波送受信は全て電子的な制御で行なわれるため、3次元走査に要する時間は大幅に短縮され、検査における操作性は著しく向上した。
【0004】
しかしながら、3次元領域に対する超音波送受信によってボリュームデータを収集する場合、極めて多くの送受信を繰り返す必要があり、しかもこれらの送受信に要する時間は、被検体の体内を伝播する超音波の音速、走査領域の大きさ、走査密度等によって決定されるため空間分解能に優れた広範囲なボリュームデータを収集するためには多くの時間が要求される。
【0005】
一方、被検体内の複数方向からの反射波を同時に受信することが可能な並列同時受信法によって画像データのリアルタイム性を向上させる方法が開発され、この方法を、上述の3次元走査に適用することによりボリュームデータの収集に要する時間を短縮することができる(例えば、特許文献1参照。)。
【0006】
しかしながら、心臓等の拍動性移動の有る臓器に対する3次元走査では多くの並列受信数が要求され、これを実現するためには装置の回路構成が極めて複雑になるという問題点を有していた。このため、超音波プローブを移動させながら複数の比較的狭い3次元領域にて収集した同一心拍時相の3次元画像データを結合処理することにより空間分解能及び時間分解能に優れた広範囲な3次元画像データ(パノラマ画像データ)を生成する方法も提案されている(例えば、特許文献2参照。)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平05−344975号公報
【特許文献2】特開2009−178448号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述の特許文献2に記載された方法によれば、拍動性移動をする臓器に対しては心拍同期法と結合処理法の適用により良好な分解能を有した広範囲な3次元画像データを得ることが可能となる。しかしながら、非周期的な動きを有する通常臓器の複数からなる検査対象部位において収集された3次元画像データを観察する場合、超音波診断装置を操作する医師や検査技師等(以下では、操作者と呼ぶ。)は、超音波プローブを当該被検体の体表面に沿って移動させながら各々の検査対象部位において収集された3次元画像データを順次観察する方法が行なわれている。
【0009】
そして、このような超音波プローブを移動させることにより検査対象部位の各々における3次元画像データを比較観察する場合等においては、第1の検査対象部位において収集された3次元画像データを観察した後、既に観察が行なわれた第2の検査対象部位の3次元画像データを再度観察しなくてはならない場合が高い頻度で発生する。このような場合、従来は、3次元画像データの観察下で超音波プローブを移動させ、所望の3次元画像データ(即ち、第2の検査対象部位において既に得られた3次元画像データと略同一の3次元画像データ)が得られる位置に超音波プローブを再配置する方法が行なわれてきた。しかしながら、この方法は、超音波プローブを試行錯誤的に移動させるため所望の3次元画像データが得られる第2の検査対象部位に超音波プローブを再配置されるまでに多くの時間を要し、従って、当該被検体に対する検査効率が大幅に低下するという問題点を有していた。
【0010】
本発明は、上述の問題点に鑑みてなされたものであり、その目的は、超音波プローブを移動させながら被検体の3次元画像データを時系列的に収集する際、3次元画像データの検査対象部位に対して予め設定した所定形状の関心領域を超音波プローブの移動に伴う3次元画像データの変化に追随させることにより、新たに収集された3次元画像データの対応部位に対し前記関心領域を自動設定することが可能な超音波診断装置及び関心領域設定用制御プログラムを提供することにある。
【課題を解決するための手段】
【0011】
上記課題を解決するために、請求項1に係る本発明の超音波診断装置は、被検体に対する3次元走査によって収集したボリュームデータに基づいて画像データを生成する超音波診断装置において、前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し、前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成手段と、前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出手段と、前記第1の3次元画像データに対して関心領域を設定する関心領域設定手段と、前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換手段と、座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示手段とを備えたことを特徴としている。
【0012】
又、請求項9に係る本発明の関心領域設定用制御プログラムは、被検体に対する3次元走査により収集したボリュームデータに基づいて画像データを生成する超音波診断装置に対し、前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成機能と、前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出機能と、前記第1の3次元画像データに対して関心領域を設定する関心領域設定機能と、前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換機能と、座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示機能を実行させることを特徴としている。
【発明の効果】
【0013】
本発明によれば、超音波プローブを移動させながら被検体の3次元画像データを時系列的に収集する際、3次元画像データの検査対象部位に対して予め設定した所定形状の関心領域を超音波プローブの移動に伴う3次元画像データの変化に追随させることにより、新たに収集された3次元画像データの対応部位に対し前記関心領域を自動設定することができる。このため、検査対象部位における3次元画像データ等の収集が容易となり、被検体に対する検査効率が向上するのみならず、当該超音波検査における操作者の負担が軽減される。
【図面の簡単な説明】
【0014】
【図1】本発明の実施例における超音波診断装置の全体構成を示すブロック図。
【図2】同実施例の超音波診断装置が備えるデータ収集部の具体的な構成を示すブロック図。
【図3】同実施例における超音波送受信方向を示す図。
【図4】同実施例における相互相関法を適用したプローブ位置情報の検出を説明するための図。
【図5】同実施例において超音波プローブの移動に伴う3次元画像データの変化に追随して自動設定される関心領域を説明するための図。
【図6】同実施例において作成される関心領域リストの具体例を示す図。
【図7】同実施例の表示部において超音波プローブの移動に伴なう3次元画像データの変化に追随して重畳表示される関心領域を示す図。
【図8】同実施例における関心領域の自動設定手順を示すフローチャート。
【図9】同実施例における関心領域の確認手順を示すフローチャート。
【図10】同実施例の変形例における超音波診断装置の全体構成を示すブロック図。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の実施例を説明する。
【実施例】
【0016】
以下に述べる本発明の実施例では、振動素子が2次元配列された超音波プローブを被検体の体表面に沿って移動させることにより時系列的な3次元画像データを収集する際、関心領域が自動設定される現在時刻toに先行する時刻tmにおいて収集された3次元画像データImの検査対象部位に対して関心領域Rmを設定し、この関心領域Rmの位置座標を超音波プローブの位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoにおける関心領域Rmの位置座標を算出する。次いで、3次元画像データIoの前記位置座標に関心領域Rmを重畳することにより3次元画像データIoに対する関心領域Rmの自動設定を行なう。
【0017】
尚、以下に述べる実施例では、M(M=4)個の関心領域Rm(m=1乃至4)が時刻tmの3次元画像データImに対して設定され、これらの関心領域Rmが現在時刻toの3次元画像データIoに対して自動設定される場合について述べるが、3次元画像データIoに自動設定される関心領域の数は4つに限定されるものではなく、例えば、M=1個であっても構わない。
【0018】
(装置の構成)
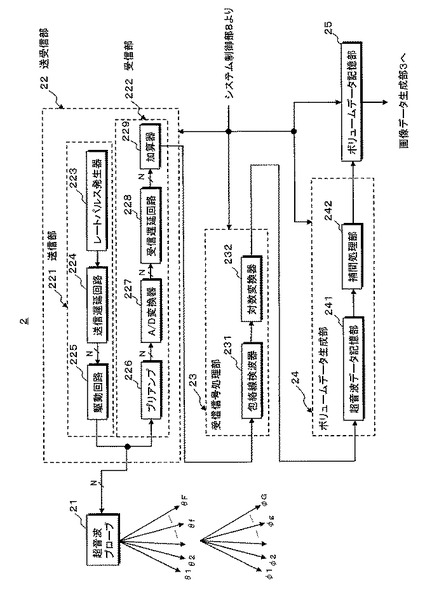
本発明の実施例につき図1乃至図7を用いて説明する。尚、図1は、本実施例における超音波診断装置の全体構成を示すブロック図であり、図2は、この超音波診断装置が備えるデータ収集部の具体的な構成を示すブロック図である。
【0019】
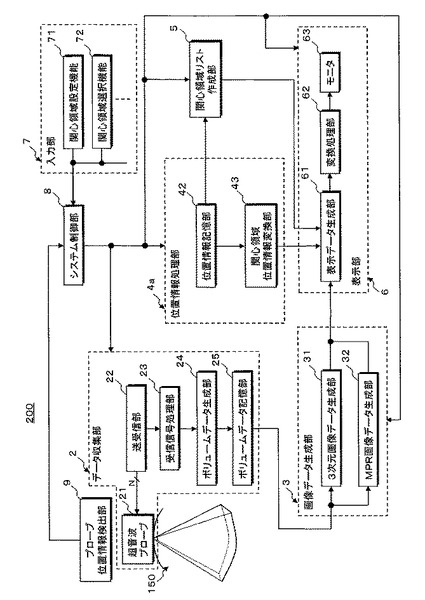
図1に示す本実施例の超音波診断装置100は、後述の超音波プローブ21を、例えば、被検体150の体表面に沿って移動させながら超音波による3次元走査を行なってボリュームデータを収集するデータ収集部2と、データ収集部2から供給された所定走査領域のボリュームデータを処理して3次元画像データやMPR(Multi Planar Reconstruction)画像データを生成する画像データ生成部3と、現在時刻toに先行する時刻t1乃至t4において収集された3次元画像データI1乃至I4の検査対象部位に設定される関心領域R1乃至R4の位置座標(位置情報)を超音波プローブ21の位置や方向等の位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoにおける関心領域R1乃至R4の位置座標を算出する位置情報処理部4と、位置情報処理部4によって算出された前記位置座標に基づき、画像データ生成部3から供給される現在時刻toの3次元画像データIoに所定形状の関心領域R1乃至R4を重畳して表示する表示部6と、被検体情報の入力、ボリュームデータ生成条件の設定、画像データ生成条件及び画像データ表示条件の設定、3次元画像データI1乃至I4に対する関心領域R1乃至R4の設定、更には、各種コマンド信号の入力等を行なう入力部7と、超音波診断装置100が有する上述の各ユニットを統括的に制御するシステム制御部8を備えている。
【0020】
次に、超音波診断装置100が備える上述の各ユニットについて更に詳しく説明する。図2に示すデータ収集部2は、被検体150の3次元領域に対して超音波パルス(送信超音波)を送信し被検体150の体内から得られた超音波反射波(受信超音波)を電気信号(受信信号)に変換する複数の振動素子を備えた超音波プローブ21と、前記3次元領域の複数方向に対して超音波パルスを順次送信するための駆動信号を超音波プローブ21の前記振動素子に供給しこれらの振動素子から得られた複数チャンネルの受信信号を整相加算する送受信部22と、整相加算後の受信信号を処理してBモードデータを生成する受信信号処理部23と、被検体150に対する3次元走査によって得られた上述のBモードデータを超音波の送受信方向に対応させて配列することによりボリュームデータを生成するボリュームデータ生成部24と、入力部7によって関心領域R1乃至R4が設定された3次元画像データI1乃至I4に対応するボリュームデータ(即ち、3次元画像データI1乃至I4の生成に用いたボリュームデータ)を保存するボリュームデータ記憶部25を備えている。
【0021】
超音波プローブ21は、2次元配列された図示しないN個の振動素子をその先端部に有し、これら振動素子の各々は、Nチャンネルの多芯ケーブルを介して送受信部22の入出力端子に接続されている。振動素子は電気音響変換素子であり、送信時には電気パルス(駆動信号)を超音波パルス(送信超音波)に変換し、受信時には超音波反射波(受信超音波)を電気的な受信信号に変換する機能を有している。尚、本実施例では、2次元配列されたN個の振動素子を有するセクタ走査用の超音波プローブ21を用いた場合について述べるが、振動素子が2次元配列されたリニア走査対応、コンベックス走査対応、ラジアル走査対応等の超音波プローブであっても構わない。
【0022】
次に、送受信部22は、被検体150に対して送信超音波を放射するための駆動信号を超音波プローブ21に設けられたN個の振動素子に供給する送信部221と、前記振動素子から得られたNチャンネルの受信信号に対して整相加算を行なう受信部222を備えている。
【0023】
送信部221は、レートパルス発生器223、送信遅延回路224及び駆動回路225を備え、レートパルス発生器223は、システム制御部8から供給される基準信号を分周することにより送信超音波の繰り返し周期を決定するレートパルスを生成する。送信遅延回路224は、独立したNチャンネルの遅延回路から構成され、送信において細いビーム幅を得るために所定の深さに送信超音波を集束するための遅延時間(集束用遅延時間)と所定の送受信方向(θf、φg)に送信超音波を放射するための遅延時間(偏向用遅延時間)を前記レートパルスに与える。そして、Nチャンネルの駆動回路225は、超音波プローブ21に内蔵されたN個の振動素子を駆動するための駆動パルスを前記レートパルスに基づいて生成する。
【0024】
一方、受信部222は、Nチャンネルから構成されるプリアンプ226、A/D変換器227及び受信遅延回路228と、加算器229を備えている。プリアンプ226は、上述の振動素子によって電気信号に変換された微小な受信信号を増幅して十分なS/Nを確保し、このプリアンプ226において増幅されたNチャンネルの受信信号はA/D変換器227にてデジタル信号に変換される。受信遅延回路228は、所定の深さからの超音波反射波を集束するための集束用遅延時間と所定の送受信方向(θf、φg)に対して強い受信指向性を設定するための偏向用遅延時間を、A/D変換器227から出力されるNチャンネルの受信信号に与え、加算器229は、これら受信遅延回路228から供給される受信信号を加算合成する。即ち、受信遅延回路228と加算器229により、所定方向から得られた受信信号は整相加算(位相合わせして加算)される。
【0025】
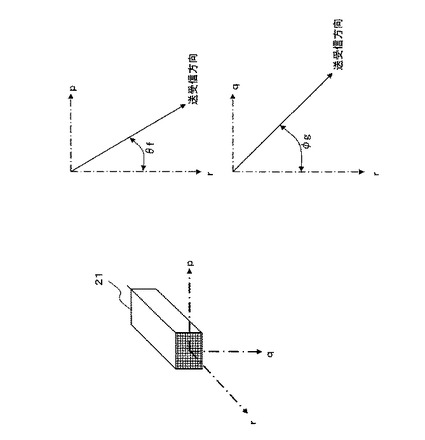
図3は、超音波プローブ21の中心軸をr軸とした直交座標(p−q−r)に対する超音波の送受信方向(θf、φg)の関係を示す。例えば、N個の振動素子はp軸方向及びq軸方向に2次元配列され、θf及びφgは、p−r平面及びq−r平面に投影された送受信方向を示している。
【0026】
次に、図2に示した受信信号処理部23は、受信部222の加算器229から供給された整相加算後の受信信号を包絡線検波する包絡線検波器231と、包絡線検波後の受信信号を対数変換してBモードデータを生成する対数変換器232を備えている。但し、包絡線検波器231と対数変換器232は順序を入れ替えて構成してもよい。
【0027】
ボリュームデータ生成部24は、図2に示すように超音波データ記憶部241と補間処理部242を備え、超音波データ記憶部241には、被検体150に対する3次元走査によって得られた受信信号に基づいて受信信号処理部23が生成したBモードデータが、システム制御部8から供給される送受信方向(θf、φg)の情報を付帯情報として順次保存される。
【0028】
一方、補間処理部242は、超音波データ記憶部241から読み出した複数のBモードデータを超音波の送受信方向に対応させて配列することにより3次元超音波データを形成し、更に、この3次元超音波データに対し補間処理等を行なってボリュームデータを生成する。そして、得られたボリュームデータは、入力部7によって設定された関心領域R1乃至R4の識別情報と共にボリュームデータ記憶部25に保存される。即ち、表示部6に表示された3次元画像データIm(m=1乃至4)の検査対象部位に対して入力部7が関心領域Rmを設定した場合、ボリュームデータ記憶部25には、関心領域Rmの設定時刻tmにおいて生成され3次元画像データImの生成に用いられたボリュームデータが関心領域Rmの識別情報を付帯情報として保存される。
【0029】
図1に戻って、画像データ生成部3は、データ収集部2のボリュームデータ生成部24から時系列的に供給されるボリュームデータあるいは入力部7から供給される関心領域Rmの選択情報に基づいてボリュームデータ記憶部25から読み出した関心領域Rmの識別情報を有するボリュームデータを処理して3次元画像データImを生成する3次元画像データ生成部31と上述のボリュームデータに基づいてMPR画像データJmを生成するMPR画像データ生成部32とを備えている。
【0030】
3次元画像データ生成部31は、図示しない不透明度・色調設定部及びレンダリング処理部を備えている。前記不透明度・色調設定部は、データ収集部2のボリュームデータ生成部24が生成したボリュームデータのボクセル値等に基づいて不透明度や色調を設定する。一方、前記レンダリング処理部は、前記不透明度・色調設定部が設定した不透明度や色調の情報に基づいて上述のボリュームデータをレンダリング処理しボリュームレンダリング画像データやサーフェスレンダリング画像データ等の3次元画像データImを生成する。
【0031】
一方、MPR画像データ生成部32は、ボリュームデータ記憶部25から読み出した上述のボリュームデータに対して関心領域Rmを含む所定方向のMPR断面(例えば、図3のp−r平面に平行なMPR断面)を設定し、このMPR断面上に存在するボクセルに基づいてMPR画像データJmを生成する。
【0032】
次に、位置情報処理部4は、被検体150の体表面に沿って移動する超音波プローブ21の時刻tm及び現在時刻toにおける位置情報を検出するプローブ位置情報検出部41と、時刻tmの超音波プローブ21によって収集された3次元画像データImに対して入力部7が設定した関心領域Rmの前記3次元画像データImにおける位置座標(即ち、超音波プローブ21を基準とした関心領域Rmの位置情報)及びプローブ位置情報検出部41によって検出された時刻tmにおける超音波プローブ21の位置情報を記憶する位置情報記憶部42と、時刻tmの3次元画像データImにおける関心領域Rmの位置座標をプローブ21の位置情報に基づいて変換処理することにより、現在時刻toの3次元画像データIoにおける前記関心領域Rmの位置座標を算出する関心領域位置情報変換部43を備えている。
【0033】
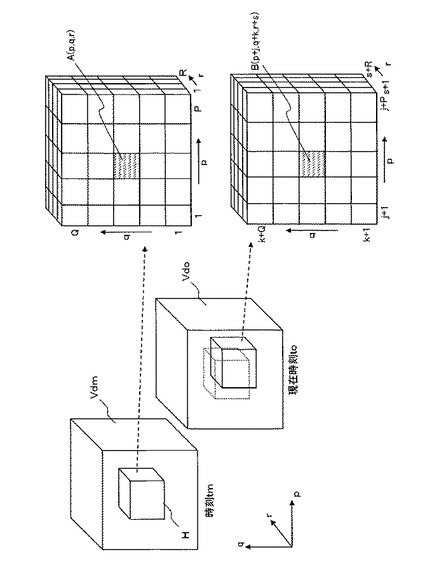
プローブ位置情報検出部41は、図示しないデータ記憶部と演算処理部を備え、データ収集部2のボリュームデータ生成部24において生成された近接する2つのボリュームデータを順次比較することにより超音波プローブ21の移動方向及び移動距離を検出し、更に、得られたこれらの移動情報に基づいて現在時刻toにおけるプローブ21の位置情報(位置及び方向)を検出する。尚、3次元画像データやボリュームデータの位置ズレに基づいて超音波プローブ21の位置情報を検出する各種の方法が既に提案されているが、ここでは、相互相関法を適用したプローブ位置情報の検出につき図4を用いて説明する。但し、説明を簡単にするために、超音波プローブ21は、その中心軸(図3のr軸)を所定方向に維持した状態で平行移動する場合について述べるが、プローブ21の位置及び方向が同時に変化するような移動であっても構わない。
【0034】
図4において、ボリュームデータ生成部24が時刻tm(m=1乃至4)にて生成したボリュームデータVdmの3次元演算領域Hにおけるボクセル値をA(p、q、r)(p=1〜P,q=1〜Q、r=1〜R)、現在時刻to(to>tm)にて生成したボリュームデータVdoのボクセル値をB(p、q、r)とすれば、プローブ21の位置情報は、次式(1)の評価関数βAB(j、k、s)に基づいて検出される。
【数1】

【0035】
即ち、ボリュームデータVdmの3次元演算領域Hにおけるボクセル値A(p、q、r)をボリュームデータVdoに対しp方向、q方向及びr方向へ逐次移動させながら上式(1)の評価関数γAB(j、k、s)を算出し、j=jx、k=kx及びs=sxにおいてγAB(j、k、s)がピーク値を有した場合、現在時刻toにおける超音波プローブ21は時刻tmに対しp方向にjxボクセル、q方向に対しkxボクセル、r方向に対しsxボクセルだけ移動したものとして検出される。但し、上式(1)におけるNは、3次元演算領域Hにおけるp方向のボクセル数P、q方向のボクセル数Q及びr方向のボクセル数Rの積を示している。
【0036】
一方、図1の位置情報記憶部42は図示しない情報記憶部と情報比較部を備え、前記情報記憶部には、表示部6において表示される時刻tm(m=1乃至4)の3次元画像データImに対し入力部7が設定した関心領域Rmの前記3次元画像データImにおける位置座標と関心領域Rmの設定時刻tmにおける超音波プローブ21の位置情報が関心領域Rmの識別情報と共に保存される。
【0037】
この場合、関心領域Rmの設定時刻tmにおいてプローブ位置検出部41が検出した超音波プローブ21の位置情報(xm、ym、zm)及び3次元画像データImに設定された関心領域Rmの位置座標(即ち、図3に示す超音波プローブ21の中心軸をr軸とした直交座標(p−q−r)における位置座標)(pm、qm、rm)が関心領域Rmの識別情報と共に保存され、更に、上述の関心領域設定時刻tm等の情報も必要に応じて保存される。尚、超音波プローブ21の位置情報(xm、ym、zm)として、例えば、振動素子配列面の中心位置座標が好適であるが、後述する関心領域Rmの位置座標変換に要求されるのは超音波プローブ21の相対的な位置情報(移動情報)であるため特に限定されない。
【0038】
一方、前記情報比較部は、入力部7によって新たに設定された関心領域の位置座標及び超音波プローブ21の位置情報と前記情報記憶部において既に保存されている関心領域Rmの位置座標(pm、qm、rm)及び超音波プローブ21の位置情報(xm、ym、zm)とを比較し、同一の関心領域位置座標及びプローブ位置情報を有する関心領域が新たに設定された場合、同一関心領域の設定を示す文言を表示するための指示信号を表示部6へ供給すると共に、新たな関心領域位置情報の前記情報記憶部における保存を拒否する。
【0039】
一方、関心領域位置情報変換部43は、図示しない演算処理部を有し、座標(xm、ym、zm)(m=1乃至4)の超音波プローブ21によって収集された時刻tmの3次元画像データImにおける関心領域Rmの位置座標(pm、qm、rm)を座標(xo、yo、zo)の超音波プローブ21によって収集された現在時刻toの3次元画像データIoにおける位置座標(pom、qom、rom)へ変換する機能を有している。
【0040】
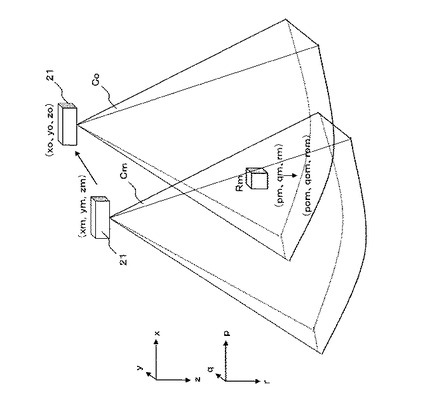
図5は、被検体周囲に形成された3次元空間(x−y−z)の座標(xm、ym、zm)に配置された超音波プローブ21により時刻tmにて収集される3次元画像データImの表示領域Cmと座標(xo、yo、zo)へ移動した超音波プローブ21により現在時刻toにて収集される3次元画像データIoの表示領域Coを示している。
【0041】
そして、時刻tmにて収集された3次元画像データImの位置座標(pm、qm、rm)に関心Rmが設定された場合、関心領域位置情報変換部43の演算処理部は、上述の位置情報記憶部42に保存された関心領域Rmの3次元画像データImにおける位置座標(pm、qm、rm)と関心領域Rmの設定時tmにおける超音波プローブ21の位置情報(xm、ym、zm)を読み出し、更に、プローブ位置情報検出部41から供給される現在時刻toにおける超音波プローブ21の位置情報(xo、yo、zo)を受信する。
【0042】
次いで、前記演算処理部は、超音波プローブ21の時刻tmにおける位置情報(xm、ym、zm)及び現在時刻toにおける位置情報(xo、yo、zo)に基づいて関心領域Rmの位置座標(pm、qm、rm)を変換処理し、現在時刻toの3次元画像データIoにおける関心領域Rmの位置座標(pom、qom、rom)を算出する。
【0043】
この場合、3次元画像データIoにおける関心領域Rmの位置座標(pom、qom、rom)は次式(2)に基づいて算出される。尚、図5では、説明を簡単にするために、関心領域R1乃至R4の中の1つを関心領域Rmとして示している。
【数2】
【0044】
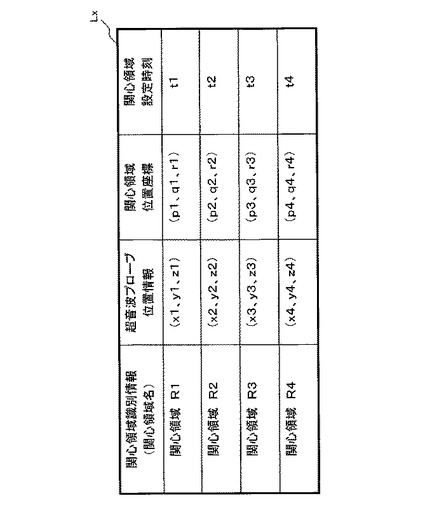
再び図1へ戻って、関心領域リスト作成部5は、上述の位置情報記憶部42に保存された関心領域Rmの識別情報(関心領域名)を読み出して所定フォーマットの関心領域リストを作成する。図6は、関心領域リストの具体例を示したものであり、この関心領域リストLxには、超音波プローブ21を順次移動させながら収集した3次元画像データI1乃至I4に対し入力部7が設定した関心領域R1乃至R4の識別情報(関心領域名)が一覧表示されている。又、図6に示すように、3次元画像データIm(m=1乃至4)における関心領域Rmの位置座標(pm、qm、rm)や関心領域Rmの設定時tmにおける超音波プローブ21の位置情報(xm、ym、zm)、更には、関心領域Rmの設定時刻tm等を上述の関心領域Rmの識別情報に対応させて一覧表示することにより関心領域リストLxを用いた関心領域Rmの選択を容易かつ的確に行なうことが可能となる。
【0045】
そして、表示部6のモニタ63に表示された上述の関心領域リストLxに示されている関心領域Rmの識別情報の中から、例えば、関心領域R2が選択された場合、システム制御部8を介して上述の選択信号を受信した画像データ生成部3は、ボリュームデータ記憶部25に保存されている各種ボリュームデータの中から関心領域R2の識別情報を有するボリュームデータを読み出す。そして、得られたボリュームデータを処理して3次元画像データあるいはMPR画像データを生成し、表示部6のモニタ63に表示する。
【0046】
この場合、操作者は、関心領域リストLxにおいて選択された関心領域R2を含む3次元画像データやMPR画像データを瞬時に観察することができる。そして、同様の手順を関心領域リストLxに示された他の関心領域に対しても行なうことにより、現在時刻toの3次元画像データIoに重畳表示されている関心領域Rmと関心領域Rmを設定する際に用いた3次元画像データImとの対応付けが容易となり、従って、3次元画像データIoに重畳された関心領域R1乃至R4の中から後続検査に好適な関心領域を容易に選択することができる。
【0047】
次に、表示部6は、画像データ生成部3が生成した時系列的な3次元画像データを表示する機能と、位置情報処理部4により現在時刻toの3次元画像データIoにおける座標(pom、qom、rom)へ座標変換された関心領域Rmを前記3次元画像データIoに重畳して表示する機能と、表示部6に表示された関心領域リストに基づいて入力部7が選択した関心領域に対応するボリュームデータを用いて画像データ生成部3が生成した3次元画像データあるいはMPR画像データを表示する機能と、関心領域リスト作成部5が作成した関心領域リストを表示する機能と、位置情報処理部4の位置情報記憶部42から供給される指示信号に従って同一関心領域の設定を示す文言を表示する機能を有し、表示データ生成部61、変換処理部62及びモニタ63を備えている。
【0048】
表示データ生成部61は、画像データ生成部3の3次元画像データ生成部31から供給される3次元画像データImに対して入力部7が設定した関心領域Rmの位置座標(pm、qm、rm)あるいは位置情報処理部4の関心領域位置情報変換部43によって座標変換された関心領域Rmの位置座標(pom、qom、rom)に基づき、現在時刻toにおいて収集された3次元画像データIoに所定形状の関心領域Rmを重畳して表示データを生成する。一方、変換処理部62は、表示データ生成部61が生成した上述の表示データに対しD/A変換とテレビフォーマット変換を行なってモニタ63に表示する。
【0049】
又、入力部7から供給される関心領域の選択信号に基づいて画像データ生成部3が生成した3次元画像データあるいはMPR画像データに対しても同様の手順により関心領域を重畳してモニタ63に表示し、更に、関心領域リスト作成部5が作成した関心領域リスト等の表示もモニタ63において行なう。
【0050】
次に、入力部7は、操作パネル上にタッチコマンドスクリーン等の表示パネルやキーボード、スイッチ、選択ボタン、マウス等の入力デバイスを備えたインターラクティブなインターフェースであり、画像データ生成部3において生成され表示部6のモニタ63に表示された当該被検体の3次元画像データIm(m=1乃至4)に対して関心領域Rmを設定する関心領域設定機能71と関心領域リスト作成部5において作成され表示部6のモニタ63に表示された関心領域リストの中から所望の関心領域を選択する関心領域選択機能72を有している。
【0051】
更に、被検体情報の入力、ボリュームデータ収集条件の設定、画像データ生成条件及び画像データ表示条件の設定、関心領域リスト作成条件の設定、各種コマンド信号の入力等も上述の入力デバイスや表示パネルを用いて行なわれる。
【0052】
一方、システム制御部8は、図示しないCPUと記憶回路を備え、前記記憶回路には、入力部7において入力あるいは設定された上述の各種情報が保存される。そして、前記CPUは、上述の入力情報及び設定情報に基づいて超音波診断装置100の各ユニットを統括的に制御し、3次元画像データの生成及び3次元画像データImの検査対象部位に対する関心領域Rmの設定と超音波プローブ21の移動に伴って変化する現在時刻toの3次元画像データIoに対する前記関心領域Rmの自動設定を実行させる。
【0053】
次に、現在時刻toに先行する時刻tm(m=1乃至4)の3次元画像データImに対して設定された関心領域Rmを現在時刻の3次元画像データに対して自動設定する際に表示部6において3次元画像データと共に表示される関心領域Rmにつき図7を用いて説明する。但し、図7では、説明を簡単にするために図5の場合と同様にして関心領域R1乃至R4の中の1つを関心領域Rmとして示し、時刻tmの3次元画像データImに設定された関心領域Rmを現在時刻tα及び現在時刻tβの各々において収集された3次元画像データIα及び3次元画像データIβに対して自動設定する場合について述べる。
【0054】
尚、図7において、図7(a−1)乃至図7(a−3)は、超音波プローブ21の移動方向と移動後の超音波プローブ21によって収集される3次元画像データの表示領域を示しており、図7(b−1)乃至図7(b−3)は、図7(a−1)乃至図7(a−3)の超音波プローブ21によって収集され表示部6のモニタ63に表示される3次元画像データとこの3次元画像データに対して重畳表示される関心領域を示している。
【0055】
即ち、図7(a−1)は、座標(xm、ym、zm)に配置された超音波プローブ21により時刻tmにて収集される3次元画像データImの表示領域Cmと表示部6に表示された3次元画像データImに対して入力部7が設定した関心領域Rmの位置座標(pm、qm、rm)を示しており、図7(b−1)は、このとき表示部6に表示される3次元画像データIm及び関心領域Rmを示している。
【0056】
一方、図7(a−2)は、超音波プローブ21を座標(xα、yα、zα)へ移動することにより収集された現在時刻tαにおける3次元画像データIαの表示領域Cαとこの3次元画像データIαに対して自動設定される関心領域Rmの位置座標(pαm、qαm、rαm)を示しており、図7(b−2)は、このとき表示部6に表示される3次元画像データIαを示している。
【0057】
この場合、時刻tmの3次元画像データImに対して設定された関心領域Rmの位置座標(pm、qm、rm)は位置情報処理部4の関心領域位置情報変換部43により3次元画像データIαにおける位置座標(pαm、qαm、rαm)に変換され、この位置座標(pαm、qαm、rαm)が、3次元画像データIαの表示領域Cαに含まれない場合には、図7(b−2)に示すように関心領域Rmは3次元画像データIαに対して重畳表示されない。
【0058】
又、図7(a−3)は、超音波プローブ21を上述の座標(xα、yα、zα)から座標(xm、ym、zm)に近接した座標(xβ、yβ、zβ)へ移動することによって収集される現在時刻tβにおける3次元画像データIβの表示領域Cβとこの3次元画像データIβに対して自動設定される関心領域Rmの位置座標(pβm、qβm、rβm)を示しており、図7(b−3)は、このとき表示部6に表示される3次元画像データIβ及び関心領域Rmを示している。
【0059】
この場合も、時刻tmの3次元画像データImに対して設定された関心領域Rmの位置座標(pm、qm、rm)は位置情報処理部4の関心領域位置情報変換部43により3次元画像データIβにおける位置座標(pβm、qβm、rβm)に変換され、この位置座標(pβm、qβm、rβm)が、3次元画像データIβの表示領域Cβに含まれる場合には、図7(b−3)に示すように関心領域Rmは3次元画像データIβに対して重畳表示される。
【0060】
(関心領域の自動設定手順)
次に、本実施例における関心領域の自動設定手順につき図8のフローチャートに沿って説明する。
【0061】
当該被検体の超音波検査に先立ち、超音波診断装置100の操作者は入力部7において被検体情報を入力した後、ボリュームデータ収集条件の設定、画像データ生成条件及び画像データ表示条件の設定、関心領域リスト作成条件の設定等を行なう。そして、これらの入力情報や設定情報はシステム制御部8の記憶回路に保存される(図8のステップS1)。
【0062】
上述の初期設定が終了したならば、操作者は、超音波プローブ21の先端部を被検体150の体表面に接触させた状態で入力部7より画像データ生成開始コマンドを入力し、このコマンド信号がシステム制御部8に供給されることにより被検体150に対するボリュームデータの収集及び保存と前記ボリュームデータに基づく3次元画像データの生成及び表示が開始される(図8のステップS2及びステップS3)。
【0063】
即ち、システム制御部8を介して上述の画像データ生成開始コマンドを受信した送受信部22のレートパルス発生器223は、システム制御部8から供給される基準信号を分周してレートパルスを生成し送信遅延回路224に供給する。送信遅延回路224は、所定の深さに超音波を集束するための集束用遅延時間と、最初の送受信方向(θ1、φ1)に超音波を送信するための偏向用遅延時間を前記レートパルスに与え、このレートパルスをNチャンネルの駆動回路225へ供給する。次いで、駆動回路225は、送信遅延回路224から供給されたレートパルスに基づいて駆動信号を生成し、この駆動信号を超音波プローブ21におけるN個の振動素子に供給して被検体150の体内に超音波パルスを放射する。
【0064】
放射された超音波パルスの一部は、音響インピーダンスの異なる臓器境界面や組織にて反射し、上述の振動素子により受信されてNチャンネルの電気的な受信信号に変換される。次いで、これらの受信信号は、プリアンプ226にて増幅された後A/D変換器227においてデジタル信号に変換され、更に、受信遅延回路228にて所定の深さからの受信超音波を集束するための集束用遅延時間と送受信方向(θ1、φ1)からの受信超音波に対し強い受信指向性を設定するための偏向用遅延時間が与えられた後加算器229にて整相加算される。
【0065】
そして、整相加算後の受信信号が供給された受信信号処理部23の包絡線検波器231及び対数変換器232は、この受信信号に対して包絡線検波と対数変換を行なってBモードデータを生成し、ボリュームデータ生成部24の超音波データ記憶部241に送受信方向を付帯情報として保存する。
【0066】
送受信方向(θ1、φ1)におけるBモードデータの生成と保存が終了したならば、システム制御部8は、送受信部22の送信遅延回路224及び受信遅延回路228における遅延時間を制御してθ方向にΔθ、φ方向にΔφずつ順次更新された送受信方向(θf、φg)(θf=θ1+(f−1)Δθ(f=2〜F)、φg=φ1+(g−1)Δφ(g=2〜G))の各々に対して同様の手順で超音波を送受信して被検体150に対し3次元走査を行なう。そして、これらの送受信方向において得られたBモードデータも上述の送受信方向を付帯情報として超音波データ記憶部241に保存する。
【0067】
一方、ボリュームデータ生成部24の補間処理部242は、超音波データ記憶部241から読み出した複数のBモードデータを送受信方向に対応させて配列することにより3次元超音波データを形成し、更に、この3次元超音波データを構成する不等間隔のボクセルを補間処理することによって等方的なボクセルで構成されるボリュームデータを生成する。そして、得られたボリュームデータは、位置情報処理部4のプローブ位置情報検出部41に設けられたデータ記憶部に保存され、更に、ボリュームデータ記憶部25を介して画像データ生成部3の3次元画像データ生成部31へ供給される。
【0068】
次いで、画像データ生成部3の3次元画像データ生成部31は、ボリュームデータ生成部24から供給された上述のボリュームデータをレンダリング処理して3次元画像データを生成し表示部6のモニタ63に表示する(図8のステップS4)。そして、上述のようなボリュームデータ及び3次元画像データの生成を繰り返し行なうことにより、表示部6には時系列的な3次元画像データが略リアルタイムで表示され、プローブ位置情報検出部41のデータ記憶部にはこのとき生成されたボリュームデータが順次保存される。
【0069】
一方、操作者は、表示部6に表示された3次元画像データの観察下で最初の検査対象部位の観察に好適な位置(x1、y1、z1)に超音波プローブ21を配置し、このとき得られた3次元画像データI1の検査対象部位に対し所定形状の関心領域R1を入力部7の関心領域設定機能71を用いて設定する(図8のステップS5)。そして、関心領域R1の設定時刻t1に収集されたボリュームデータ(即ち、3次元画像データI1の生成に用いられたボリュームデータ)は、関心領域R1の識別情報を付帯情報としてデータ収集部2のボリュームデータ記憶部25に保存される(図8のステップS6)。
【0070】
次いで、操作者は、超音波プローブ21を被検体150の体表面に沿って移動させ(図8のステップS7)、画像データ生成部3の3次元画像データ生成部31は、このときボリュームデータ生成部24から供給されるボリュームデータに基づいて現在時刻toの3次元画像データIoを生成する(図8のステップS8)。
【0071】
一方、位置情報処理部4のプローブ位置情報検出部41は、自己のデータ記憶部に保存された複数のボリュームデータの中から近接する2つのボリュームデータを順次読み出し、これらのボリュームデータに対し相互相関処理を行なうことにより現在時刻toにおける超音波プローブ21の位置情報(xo、yo、zo)を検出する(図8のステップS9)。
【0072】
次いで、関心領域位置情報変換部43は、プローブ位置情報検出部41によって検出された関心領域R1の設定時刻t1における超音波プローブ21の位置情報(x1、y1、z1)及び現在時刻toにおける超音波プローブ21の位置情報(xo、yo、zo)に基づき、表示部6において表示された3次元画像データI1に対して入力部7が設定した関心領域R1の位置座標(p1、q1、r1)を座標変換することにより、現在時刻toの3次元画像データIoにおける関心領域R1の位置座標(po1、qo1、ro1)を算出する(図8のステップS10)。
【0073】
そして、表示部6は、現在時刻toにおいて画像データ生成部3が生成した3次元画像データIoの位置座標(po1、qo1、ro1)に関心領域R1を重畳して自己のモニタ63に表示する(図8のステップS11)。
【0074】
更に、超音波プローブ21の移動に伴って更新された現在時刻t0における3次元画像データIoの生成、超音波プローブ位置情報(xo、yo、zo)の検出、関心領域R1の位置座標変換、更には、3次元画像データIoと位置座標変換された関心領域R1との重畳表示を繰り返し行なう(図8のステップS7乃至ステップS11)。
【0075】
一方、上述の手順により関心領域R1が自動設定された3次元画像データIoに対して新たな関心領域R2乃至R4を設定する場合、上述のステップS5乃至S11が繰り返し行なわれる。このとき、表示部6には複数の関心領域が重畳された現在時刻toの画像データIoが表示され、これら関心領域の設定時刻において収集されたボリュームデータが関心領域の識別情報を付帯情報としてデータ収集部2のボリュームデータ記憶部25に保存される。
【0076】
即ち、図8に示した関心領域の自動設定手順によれば、入力部7が備えた関心領域設定機能71により関心領域R1が自動設定された現在時刻to1の3次元画像データIoに対する関心領域R2の設定、関心領域R1及びR2が自動設定された現在時刻to2の3次元画像データIoに対する関心領域R3の設定、更には、関心領域R1乃至R3が自動設定された現在時刻to3の3次元画像データIoに対する関心領域R4の設定が順次行なわれる。
【0077】
(関心領域の確認手順)
次に、現在時刻toの3次元画像データIoに対して自動設定された関心領域R1乃至R4の中から後続の超音波検査に好適な関心領域を選択する際の確認手順につき図9のフローチャートを用いて説明する。
【0078】
既に述べたように、図8のステップS5乃至ステップS11を繰り返すことにより、現在時刻toの3次元画像データIoには時刻tm(m=1乃至4)において設定された関心領域Rmが自動設定されて表示部6に表示される。一方、データ収集部2のボリュームデータ記憶部25には、時刻tmのボリュームデータが関心領域Rmの識別情報と共に保存され、位置情報処理部4の位置情報記憶部42には、プローブ位置情報検出部41が検出した時刻tmにおける超音波プローブ21の位置情報(xm、ym、zm)及び入力部7が3次元画像データImに対して設定した関心領域Rmの位置座標(pm、qm、rm)が関心領域Rmの識別情報と共に保存される。
【0079】
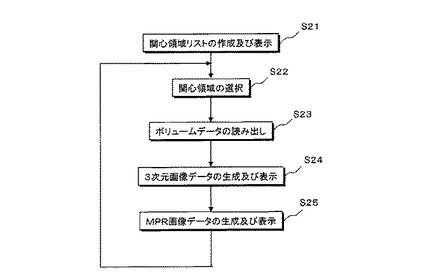
このとき、関心領域リスト作成部5は、位置情報記憶部42に保存された上述の各種情報を読み出して関心領域リストを作成し、得られた関心領域リストを表示部6に表示する(図9のステップS21)。
【0080】
一方、操作者は、入力部7の関心領域選択機能72を用いて表示部6の関心領域リストに示された関心領域R1乃至R4の中から、例えば、関心領域R2を選択した場合(図9のステップS22)、システム制御部8を介して上述の選択信号を受信した画像データ生成部3の3次元画像データ生成部31は、ボリュームデータ記憶部25に保存されている各種ボリュームデータの中から関心領域R2の識別情報を有するボリュームデータを読み出す(図9のステップS23)。次いで、得られたボリュームデータをレンダリング処理して3次元画像データI2を生成し、表示部6に表示する(図9のステップS24)。
【0081】
又、MPR画像データの観察が必要な場合、画像データ生成部3のMPR画像データ生成部32は、入力部7からシステム制御部8を介して供給された関心領域R2の選択信号と関心領域リスト作成部5から供給された関心領域R2の位置座標(p2、q2、r2)を受信し、前記選択信号によりボリュームデータ記憶部25から読み出した関心領域R2の識別情報を有するボリュームデータに関心領域R2を設定する。そして、この関心領域R2を含む所定方向のMPR断面に存在するボクセルに基づいてMPR画像データを生成し、表示部6に表示する(図9のステップS25)。
【0082】
更に、3次元画像データIoに示された他の関心領域に対応する3次元画像データやMPR画像データを観察したい場合には、関心領域リストに示された関心領域R1乃至R4の中から所望の関心領域を選択した後、上述のステップS23乃至ステップS25を繰り返すことにより新たに選択した関心領域を含む3次元画像データやMPR画像データの観察が可能となる(図9のステップS22乃至ステップS25)。
【0083】
尚、上述のステップS24における3次元画像データの表示やステップS25におけるMPR画像データの表示に際しては、夫々の画像データの座標(pm、qm、rmに関心領域Rmを重畳して表示することが望ましいが特に限定されない。
【0084】
上述の手順で操作者は関心領域リストに示された関心領域を選択することにより、この関心領域を設定する際に用いた3次元画像データを容易に再生することができるため、現在時刻toの3次元画像データIoに重畳表示されている関心領域R1乃至R4の各々に対応した3次元画像データIo乃至I4の把握が容易となる。従って、関心領域R1乃至R4の中から後続検査に好適な関心領域を容易に選択することができ、この関心領域に基づいて超音波プローブ21を最適な位置に再配置することが可能となる。
【0085】
(変形例)
次に、本実施例の変形例について説明する。上述の実施例では、3次元走査により時系列的に得られるボリュームデータの移動量に基づいて超音波プローブ21の位置情報を検出する場合について述べたが、本変形例では、磁気センサ等によって超音波プローブ21の位置情報を検出する場合について述べる。
【0086】
本変形例における超音波診断装置の全体構成につき図10を用いて説明する。但し、図10において、図1に示した超音波診断装置100の各ユニットと同一の構成及び機能を有するユニットに対しては同一の符号を付加し詳細な説明を省略する。
【0087】
即ち、本変形例の超音波診断装置200は、超音波プローブ21を、例えば、被検体150の体表面に沿って移動させながら超音波による3次元走査を行なってボリュームデータを収集するデータ収集部2と、データ収集部2から供給された所定走査領域のボリュームデータを処理して3次元画像データやMPR画像データを生成する画像データ生成部3と、現在時刻toに先行する時刻tmにおいて収集された3次元画像データImの検査対象部位に設定される関心領域Rmの位置座標(位置情報)を超音波プローブ21の位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoに対する位置座標を算出する位置情報処理部4aと、位置情報処理部4aによって算出された関心領域Rmの位置座標に基づき、画像データ生成部3から供給される現在時刻toの3次元画像データIoに所定形状の関心領域Rmを重畳して表示する表示部6と、被検体情報の入力、ボリュームデータ生成条件の設定、画像データ生成条件及び画像データ表示条件の設定、3次元画像データに対する関心領域の設定、更には、各種コマンド信号の入力等を行なう入力部7と、超音波プローブ21に装着され、この超音波プローブ21の位置や方向(傾斜角度)等を検出するプローブ位置検出部9と、超音波診断装置200が有する上述の各ユニットを統括的に制御するシステム制御部8を備えている。
【0088】
そして、位置情報処理部4aは、図1の超音波診断装置100と同様にして、時刻tmの超音波プローブ21によって収集された3次元画像データImに対して入力部7が設定した関心領域Rmの前記3次元画像データImにおける位置座標及びプローブ位置情報検出部9によって検出された時刻tmにおける超音波プローブ21の位置情報を記憶する位置情報記憶部42と、プローブ21の位置情報に基づいて関心領域Rmの位置座標を変換処理することにより、現在時刻toの超音波プローブ21に形成された座標系における関心領域Rmの位置座標を算出する関心領域位置情報変換部43を備えている。
【0089】
一方、プローブ位置情報検出部9は、超音波プローブ21の傾斜角度、移動方向及び移動量等を検出する機能を有している。超音波プローブ21の位置情報検出法として各種の方法が提案されているが、検出精度、コスト及び大きさ等を考慮した場合超音波センサあるいは磁気センサを用いる方法が好適である。例えば、磁気センサを有したプローブ位置情報検出部9は、特開2000−5168号公報等に記載されているように磁気を発生するトランスミッタ(磁気発生部)と、この磁気を検出する複数の磁気センサを有したレシーバと、検出された磁気に基づく電気信号(検出信号)を処理して超音波プローブ21の傾きや位置に関する情報を算出する位置情報算出部(何れも図示せず)を備えている。
【0090】
磁気センサを有したレシーバは、通常、超音波プローブ21の表面に装着され、前記トランスミッタは超音波プローブ21の近傍に設置される。そして、前記位置情報算出部は、磁気によって計測された複数からなる磁気センサの各々とトランスミッタとの距離に基づいて超音波プローブ21の位置情報(即ち、相対的な傾斜角度や位置座標)を算出する。このような超音波センサあるいは磁気センサを用いた方法によれば、上述の実施例に示した方法と比較して超音波プローブ21の操作性は多少劣化するが、相互相関演算等の複雑な演算処理を行なう必要がないためプローブ21の位置情報を短時間で検出することが可能となる。
【0091】
以上述べた本発明の実施例及びその変形例によれば、超音波プローブを移動させながら複数からなる被検体の3次元画像データを時系列的に収集する際、3次元画像データの検査対象部位に対して予め設定した所定形状の関心領域を超音波プローブの移動に伴う3次元画像データの変化に追随させることにより、新たに収集された3次元画像データの対応部位に対し前記関心領域を自動設定することができる。このため、検査対象部位における3次元画像データやMPR画像データの収集が容易となり、被検体に対する検査効率が向上するのみならず、当該超音波検査における操作者の負担が軽減される。
【0092】
又、現在時刻に先行する時刻の3次元画像データに対して予め設定された複数の関心領域が現在時刻の3次元画像データに対して自動設定された場合、これらの関心領域が一覧表示された関心領域リストにて選択された所望の関心領域に対応する3次元画像データを瞬時に観察することができるため、現在時刻の3次元画像データに重畳表示されている関心領域とこの関心領域を設定する際に用いた3次元画像データとの対応付けが容易となり、従って、前記3次元画像データに自動設定された関心領域の中から後続検査に好適な関心領域を容易に選択することができる。
【0093】
更に、関心領域リストにおいて選択された関心領域に対応するボリュームデータに基づいて上述の3次元画像データの他に前記関心領域を含むMPR画像データの生成と表示が可能となるため、後続検査に好適な関心領域の選択を更に正確に行なうことができる。
【0094】
一方、超音波センサあるいは磁気センサ等をプローブ位置情報検出部に用いた本実施例の変形例によれば、上述の実施例に示した方法と比較して超音波プローブの操作性は多少劣化するが、相互相関演算等の複雑な演算処理が不要となるためプローブ位置情報の検出を短時間で行なうことが可能となり、従って、比較的速い速度で移動する超音波プローブに対しても関心領域の自動設定が容易となる。
【0095】
以上、本発明の実施例及びその変形例について述べてきたが、本発明は、上述の実施例及びその変形例に限定されるものではなく、更に変形して実施することが可能である。例えば、上述の実施例及びその変形例では、M(M=4)個の関心領域Rm(m=1乃至4)が時刻tmの3次元画像データImに対して設定され、これらの関心領域Rmが現在時刻toの3次元画像データIoに対して自動設定される場合について述べたが、3次元画像データIoに自動設定される関心領域の数は4つに限定されるものではなく、例えば、M=1個であっても構わない。
【0096】
又、図8に示したように、関心領域が自動設定された現在時刻toの3次元画像データIoに対して新たな関心領域を設定する場合について述べたが、現在時刻toまでに設定された複数の関心領域を現在時刻toの3次元画像データIoに対して一括自動設定してもよい。
【0097】
更に、関心領域リスト作成部5によって作成された関心領域リストや同一関心領域が設定された旨を示す文言を表示部6に表示する場合について述べたが、別途設けられた表示部あるいは入力部7に備えられた表示パネル等に表示してもよく、警告音や警告ランプの点滅等の手段によって同一関心領域が設定された旨を操作者に報知しても構わない。
【0098】
一方、上述の実施例におけるプローブ位置情報検出部41は、ボリュームデータに対して相互相関法を適用することにより超音波プローブ21の位置情報を検出する場合について述べたが、異なる時刻において収集された近接する2つのボリュームデータの差分値を求め、この差分値の絶対値和あるいは2乗和が最小となるシフト方向及びシフト量に基づいて超音波プローブ21の位置情報を検出してもよく、又、エントロピー法等の他の方法を適用してもよい。
【0099】
又、上述の実施例及びその変形例における関心領域リスト作成部5は、関心領域識別情報(関心領域名)、超音波プローブ21の位置情報、関心領域Rmの位置座標等に基づいて関心領域リストを作成する場合について述べたが、これに限定されるものではなく、例えば、関心領域識別情報のみから作成してもよい。
【0100】
一方、上述の実施例及びその変形例では、N個の振動素子が2次元配列されたセクタ走査用の超音波プローブ21を用いてボリュームデータを収集する場合について述べたが、前記ボリュームデータは、振動素子が2次元配列されたリニア走査対応、コンベックス走査対応、ラジアル走査対応等の超音波プローブを用いて収集してもよく、又、振動素子が1次元配列された超音波プローブを所定の方向へ機械的に高速移動させることによりボリュームデータの収集を行なってもよい。
【0101】
更に、上述のボリュームデータはBモードデータに基づいて生成される場合について述べたが、カラードプラデータ等の他の超音波データに基づいて生成されたものであってもよい。
【符号の説明】
【0102】
2…データ収集部
21…超音波プローブ
22…送受信部
23…受信信号処理部
24…ボリュームデータ生成部
25…ボリュームデータ記憶部
3…画像データ生成部
31…3次元画像データ生成部
32…MPR画像データ生成部
4、4a…位置情報処理部
41…プローブ位置情報検出部
42…位置情報記憶部
43…関心領域位置情報変換部
5…関心領域リスト作成部
6…表示部
61…表示データ生成部
62…変換処理部
63…モニタ
7…入力部
71…関心領域設定機能
72…関心領域選択機能
8…システム制御部
9…プローブ位置情報検出部
100、200…超音波診断装置
【技術分野】
【0001】
本発明は、超音波診断装置及び関心領域設定用制御プログラムに係り、特に、超音波プローブを移動させながら被検体の画像データを時系列的に収集する際、現在時刻に先行する時刻にて収集された画像データに対して予め設定した関心領域を現在時刻の画像データに対して自動設定することが可能な超音波診断装置及び関心領域設定用制御プログラムに関する。
【背景技術】
【0002】
超音波診断装置は、超音波プローブに設けられた振動素子から発生する超音波を被検体内に放射し、被検体組織の音響インピーダンスの差異によって生ずる反射波を前記振動素子により受信して生体情報を収集するものであり、超音波プローブを体表面に接触させるだけの簡単な操作で2次元画像データや3次元画像データのリアルタイム表示が可能となるため、各種臓器の形態診断や機能診断に広く用いられている。
【0003】
3次元画像データの収集を目的とした従来の3次元走査では、複数の振動素子が1次元配列された超音波プローブをその配列方向に対して垂直な方向に移動あるいは回動させながら被検体の3次元領域に対して超音波を送受信し、このとき収集したボリュームデータ(3次元データ)をレンダリング処理することにより3次元画像データの生成が行なわれてきた。又、近年では、複数の振動素子が2次元配列された、所謂、2次元アレイ超音波プローブが実用化されている。この2次元アレイ超音波プローブにより3次元領域に対する超音波送受信は全て電子的な制御で行なわれるため、3次元走査に要する時間は大幅に短縮され、検査における操作性は著しく向上した。
【0004】
しかしながら、3次元領域に対する超音波送受信によってボリュームデータを収集する場合、極めて多くの送受信を繰り返す必要があり、しかもこれらの送受信に要する時間は、被検体の体内を伝播する超音波の音速、走査領域の大きさ、走査密度等によって決定されるため空間分解能に優れた広範囲なボリュームデータを収集するためには多くの時間が要求される。
【0005】
一方、被検体内の複数方向からの反射波を同時に受信することが可能な並列同時受信法によって画像データのリアルタイム性を向上させる方法が開発され、この方法を、上述の3次元走査に適用することによりボリュームデータの収集に要する時間を短縮することができる(例えば、特許文献1参照。)。
【0006】
しかしながら、心臓等の拍動性移動の有る臓器に対する3次元走査では多くの並列受信数が要求され、これを実現するためには装置の回路構成が極めて複雑になるという問題点を有していた。このため、超音波プローブを移動させながら複数の比較的狭い3次元領域にて収集した同一心拍時相の3次元画像データを結合処理することにより空間分解能及び時間分解能に優れた広範囲な3次元画像データ(パノラマ画像データ)を生成する方法も提案されている(例えば、特許文献2参照。)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平05−344975号公報
【特許文献2】特開2009−178448号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述の特許文献2に記載された方法によれば、拍動性移動をする臓器に対しては心拍同期法と結合処理法の適用により良好な分解能を有した広範囲な3次元画像データを得ることが可能となる。しかしながら、非周期的な動きを有する通常臓器の複数からなる検査対象部位において収集された3次元画像データを観察する場合、超音波診断装置を操作する医師や検査技師等(以下では、操作者と呼ぶ。)は、超音波プローブを当該被検体の体表面に沿って移動させながら各々の検査対象部位において収集された3次元画像データを順次観察する方法が行なわれている。
【0009】
そして、このような超音波プローブを移動させることにより検査対象部位の各々における3次元画像データを比較観察する場合等においては、第1の検査対象部位において収集された3次元画像データを観察した後、既に観察が行なわれた第2の検査対象部位の3次元画像データを再度観察しなくてはならない場合が高い頻度で発生する。このような場合、従来は、3次元画像データの観察下で超音波プローブを移動させ、所望の3次元画像データ(即ち、第2の検査対象部位において既に得られた3次元画像データと略同一の3次元画像データ)が得られる位置に超音波プローブを再配置する方法が行なわれてきた。しかしながら、この方法は、超音波プローブを試行錯誤的に移動させるため所望の3次元画像データが得られる第2の検査対象部位に超音波プローブを再配置されるまでに多くの時間を要し、従って、当該被検体に対する検査効率が大幅に低下するという問題点を有していた。
【0010】
本発明は、上述の問題点に鑑みてなされたものであり、その目的は、超音波プローブを移動させながら被検体の3次元画像データを時系列的に収集する際、3次元画像データの検査対象部位に対して予め設定した所定形状の関心領域を超音波プローブの移動に伴う3次元画像データの変化に追随させることにより、新たに収集された3次元画像データの対応部位に対し前記関心領域を自動設定することが可能な超音波診断装置及び関心領域設定用制御プログラムを提供することにある。
【課題を解決するための手段】
【0011】
上記課題を解決するために、請求項1に係る本発明の超音波診断装置は、被検体に対する3次元走査によって収集したボリュームデータに基づいて画像データを生成する超音波診断装置において、前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し、前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成手段と、前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出手段と、前記第1の3次元画像データに対して関心領域を設定する関心領域設定手段と、前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換手段と、座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示手段とを備えたことを特徴としている。
【0012】
又、請求項9に係る本発明の関心領域設定用制御プログラムは、被検体に対する3次元走査により収集したボリュームデータに基づいて画像データを生成する超音波診断装置に対し、前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成機能と、前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出機能と、前記第1の3次元画像データに対して関心領域を設定する関心領域設定機能と、前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換機能と、座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示機能を実行させることを特徴としている。
【発明の効果】
【0013】
本発明によれば、超音波プローブを移動させながら被検体の3次元画像データを時系列的に収集する際、3次元画像データの検査対象部位に対して予め設定した所定形状の関心領域を超音波プローブの移動に伴う3次元画像データの変化に追随させることにより、新たに収集された3次元画像データの対応部位に対し前記関心領域を自動設定することができる。このため、検査対象部位における3次元画像データ等の収集が容易となり、被検体に対する検査効率が向上するのみならず、当該超音波検査における操作者の負担が軽減される。
【図面の簡単な説明】
【0014】
【図1】本発明の実施例における超音波診断装置の全体構成を示すブロック図。
【図2】同実施例の超音波診断装置が備えるデータ収集部の具体的な構成を示すブロック図。
【図3】同実施例における超音波送受信方向を示す図。
【図4】同実施例における相互相関法を適用したプローブ位置情報の検出を説明するための図。
【図5】同実施例において超音波プローブの移動に伴う3次元画像データの変化に追随して自動設定される関心領域を説明するための図。
【図6】同実施例において作成される関心領域リストの具体例を示す図。
【図7】同実施例の表示部において超音波プローブの移動に伴なう3次元画像データの変化に追随して重畳表示される関心領域を示す図。
【図8】同実施例における関心領域の自動設定手順を示すフローチャート。
【図9】同実施例における関心領域の確認手順を示すフローチャート。
【図10】同実施例の変形例における超音波診断装置の全体構成を示すブロック図。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の実施例を説明する。
【実施例】
【0016】
以下に述べる本発明の実施例では、振動素子が2次元配列された超音波プローブを被検体の体表面に沿って移動させることにより時系列的な3次元画像データを収集する際、関心領域が自動設定される現在時刻toに先行する時刻tmにおいて収集された3次元画像データImの検査対象部位に対して関心領域Rmを設定し、この関心領域Rmの位置座標を超音波プローブの位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoにおける関心領域Rmの位置座標を算出する。次いで、3次元画像データIoの前記位置座標に関心領域Rmを重畳することにより3次元画像データIoに対する関心領域Rmの自動設定を行なう。
【0017】
尚、以下に述べる実施例では、M(M=4)個の関心領域Rm(m=1乃至4)が時刻tmの3次元画像データImに対して設定され、これらの関心領域Rmが現在時刻toの3次元画像データIoに対して自動設定される場合について述べるが、3次元画像データIoに自動設定される関心領域の数は4つに限定されるものではなく、例えば、M=1個であっても構わない。
【0018】
(装置の構成)
本発明の実施例につき図1乃至図7を用いて説明する。尚、図1は、本実施例における超音波診断装置の全体構成を示すブロック図であり、図2は、この超音波診断装置が備えるデータ収集部の具体的な構成を示すブロック図である。
【0019】
図1に示す本実施例の超音波診断装置100は、後述の超音波プローブ21を、例えば、被検体150の体表面に沿って移動させながら超音波による3次元走査を行なってボリュームデータを収集するデータ収集部2と、データ収集部2から供給された所定走査領域のボリュームデータを処理して3次元画像データやMPR(Multi Planar Reconstruction)画像データを生成する画像データ生成部3と、現在時刻toに先行する時刻t1乃至t4において収集された3次元画像データI1乃至I4の検査対象部位に設定される関心領域R1乃至R4の位置座標(位置情報)を超音波プローブ21の位置や方向等の位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoにおける関心領域R1乃至R4の位置座標を算出する位置情報処理部4と、位置情報処理部4によって算出された前記位置座標に基づき、画像データ生成部3から供給される現在時刻toの3次元画像データIoに所定形状の関心領域R1乃至R4を重畳して表示する表示部6と、被検体情報の入力、ボリュームデータ生成条件の設定、画像データ生成条件及び画像データ表示条件の設定、3次元画像データI1乃至I4に対する関心領域R1乃至R4の設定、更には、各種コマンド信号の入力等を行なう入力部7と、超音波診断装置100が有する上述の各ユニットを統括的に制御するシステム制御部8を備えている。
【0020】
次に、超音波診断装置100が備える上述の各ユニットについて更に詳しく説明する。図2に示すデータ収集部2は、被検体150の3次元領域に対して超音波パルス(送信超音波)を送信し被検体150の体内から得られた超音波反射波(受信超音波)を電気信号(受信信号)に変換する複数の振動素子を備えた超音波プローブ21と、前記3次元領域の複数方向に対して超音波パルスを順次送信するための駆動信号を超音波プローブ21の前記振動素子に供給しこれらの振動素子から得られた複数チャンネルの受信信号を整相加算する送受信部22と、整相加算後の受信信号を処理してBモードデータを生成する受信信号処理部23と、被検体150に対する3次元走査によって得られた上述のBモードデータを超音波の送受信方向に対応させて配列することによりボリュームデータを生成するボリュームデータ生成部24と、入力部7によって関心領域R1乃至R4が設定された3次元画像データI1乃至I4に対応するボリュームデータ(即ち、3次元画像データI1乃至I4の生成に用いたボリュームデータ)を保存するボリュームデータ記憶部25を備えている。
【0021】
超音波プローブ21は、2次元配列された図示しないN個の振動素子をその先端部に有し、これら振動素子の各々は、Nチャンネルの多芯ケーブルを介して送受信部22の入出力端子に接続されている。振動素子は電気音響変換素子であり、送信時には電気パルス(駆動信号)を超音波パルス(送信超音波)に変換し、受信時には超音波反射波(受信超音波)を電気的な受信信号に変換する機能を有している。尚、本実施例では、2次元配列されたN個の振動素子を有するセクタ走査用の超音波プローブ21を用いた場合について述べるが、振動素子が2次元配列されたリニア走査対応、コンベックス走査対応、ラジアル走査対応等の超音波プローブであっても構わない。
【0022】
次に、送受信部22は、被検体150に対して送信超音波を放射するための駆動信号を超音波プローブ21に設けられたN個の振動素子に供給する送信部221と、前記振動素子から得られたNチャンネルの受信信号に対して整相加算を行なう受信部222を備えている。
【0023】
送信部221は、レートパルス発生器223、送信遅延回路224及び駆動回路225を備え、レートパルス発生器223は、システム制御部8から供給される基準信号を分周することにより送信超音波の繰り返し周期を決定するレートパルスを生成する。送信遅延回路224は、独立したNチャンネルの遅延回路から構成され、送信において細いビーム幅を得るために所定の深さに送信超音波を集束するための遅延時間(集束用遅延時間)と所定の送受信方向(θf、φg)に送信超音波を放射するための遅延時間(偏向用遅延時間)を前記レートパルスに与える。そして、Nチャンネルの駆動回路225は、超音波プローブ21に内蔵されたN個の振動素子を駆動するための駆動パルスを前記レートパルスに基づいて生成する。
【0024】
一方、受信部222は、Nチャンネルから構成されるプリアンプ226、A/D変換器227及び受信遅延回路228と、加算器229を備えている。プリアンプ226は、上述の振動素子によって電気信号に変換された微小な受信信号を増幅して十分なS/Nを確保し、このプリアンプ226において増幅されたNチャンネルの受信信号はA/D変換器227にてデジタル信号に変換される。受信遅延回路228は、所定の深さからの超音波反射波を集束するための集束用遅延時間と所定の送受信方向(θf、φg)に対して強い受信指向性を設定するための偏向用遅延時間を、A/D変換器227から出力されるNチャンネルの受信信号に与え、加算器229は、これら受信遅延回路228から供給される受信信号を加算合成する。即ち、受信遅延回路228と加算器229により、所定方向から得られた受信信号は整相加算(位相合わせして加算)される。
【0025】
図3は、超音波プローブ21の中心軸をr軸とした直交座標(p−q−r)に対する超音波の送受信方向(θf、φg)の関係を示す。例えば、N個の振動素子はp軸方向及びq軸方向に2次元配列され、θf及びφgは、p−r平面及びq−r平面に投影された送受信方向を示している。
【0026】
次に、図2に示した受信信号処理部23は、受信部222の加算器229から供給された整相加算後の受信信号を包絡線検波する包絡線検波器231と、包絡線検波後の受信信号を対数変換してBモードデータを生成する対数変換器232を備えている。但し、包絡線検波器231と対数変換器232は順序を入れ替えて構成してもよい。
【0027】
ボリュームデータ生成部24は、図2に示すように超音波データ記憶部241と補間処理部242を備え、超音波データ記憶部241には、被検体150に対する3次元走査によって得られた受信信号に基づいて受信信号処理部23が生成したBモードデータが、システム制御部8から供給される送受信方向(θf、φg)の情報を付帯情報として順次保存される。
【0028】
一方、補間処理部242は、超音波データ記憶部241から読み出した複数のBモードデータを超音波の送受信方向に対応させて配列することにより3次元超音波データを形成し、更に、この3次元超音波データに対し補間処理等を行なってボリュームデータを生成する。そして、得られたボリュームデータは、入力部7によって設定された関心領域R1乃至R4の識別情報と共にボリュームデータ記憶部25に保存される。即ち、表示部6に表示された3次元画像データIm(m=1乃至4)の検査対象部位に対して入力部7が関心領域Rmを設定した場合、ボリュームデータ記憶部25には、関心領域Rmの設定時刻tmにおいて生成され3次元画像データImの生成に用いられたボリュームデータが関心領域Rmの識別情報を付帯情報として保存される。
【0029】
図1に戻って、画像データ生成部3は、データ収集部2のボリュームデータ生成部24から時系列的に供給されるボリュームデータあるいは入力部7から供給される関心領域Rmの選択情報に基づいてボリュームデータ記憶部25から読み出した関心領域Rmの識別情報を有するボリュームデータを処理して3次元画像データImを生成する3次元画像データ生成部31と上述のボリュームデータに基づいてMPR画像データJmを生成するMPR画像データ生成部32とを備えている。
【0030】
3次元画像データ生成部31は、図示しない不透明度・色調設定部及びレンダリング処理部を備えている。前記不透明度・色調設定部は、データ収集部2のボリュームデータ生成部24が生成したボリュームデータのボクセル値等に基づいて不透明度や色調を設定する。一方、前記レンダリング処理部は、前記不透明度・色調設定部が設定した不透明度や色調の情報に基づいて上述のボリュームデータをレンダリング処理しボリュームレンダリング画像データやサーフェスレンダリング画像データ等の3次元画像データImを生成する。
【0031】
一方、MPR画像データ生成部32は、ボリュームデータ記憶部25から読み出した上述のボリュームデータに対して関心領域Rmを含む所定方向のMPR断面(例えば、図3のp−r平面に平行なMPR断面)を設定し、このMPR断面上に存在するボクセルに基づいてMPR画像データJmを生成する。
【0032】
次に、位置情報処理部4は、被検体150の体表面に沿って移動する超音波プローブ21の時刻tm及び現在時刻toにおける位置情報を検出するプローブ位置情報検出部41と、時刻tmの超音波プローブ21によって収集された3次元画像データImに対して入力部7が設定した関心領域Rmの前記3次元画像データImにおける位置座標(即ち、超音波プローブ21を基準とした関心領域Rmの位置情報)及びプローブ位置情報検出部41によって検出された時刻tmにおける超音波プローブ21の位置情報を記憶する位置情報記憶部42と、時刻tmの3次元画像データImにおける関心領域Rmの位置座標をプローブ21の位置情報に基づいて変換処理することにより、現在時刻toの3次元画像データIoにおける前記関心領域Rmの位置座標を算出する関心領域位置情報変換部43を備えている。
【0033】
プローブ位置情報検出部41は、図示しないデータ記憶部と演算処理部を備え、データ収集部2のボリュームデータ生成部24において生成された近接する2つのボリュームデータを順次比較することにより超音波プローブ21の移動方向及び移動距離を検出し、更に、得られたこれらの移動情報に基づいて現在時刻toにおけるプローブ21の位置情報(位置及び方向)を検出する。尚、3次元画像データやボリュームデータの位置ズレに基づいて超音波プローブ21の位置情報を検出する各種の方法が既に提案されているが、ここでは、相互相関法を適用したプローブ位置情報の検出につき図4を用いて説明する。但し、説明を簡単にするために、超音波プローブ21は、その中心軸(図3のr軸)を所定方向に維持した状態で平行移動する場合について述べるが、プローブ21の位置及び方向が同時に変化するような移動であっても構わない。
【0034】
図4において、ボリュームデータ生成部24が時刻tm(m=1乃至4)にて生成したボリュームデータVdmの3次元演算領域Hにおけるボクセル値をA(p、q、r)(p=1〜P,q=1〜Q、r=1〜R)、現在時刻to(to>tm)にて生成したボリュームデータVdoのボクセル値をB(p、q、r)とすれば、プローブ21の位置情報は、次式(1)の評価関数βAB(j、k、s)に基づいて検出される。
【数1】
【0035】
即ち、ボリュームデータVdmの3次元演算領域Hにおけるボクセル値A(p、q、r)をボリュームデータVdoに対しp方向、q方向及びr方向へ逐次移動させながら上式(1)の評価関数γAB(j、k、s)を算出し、j=jx、k=kx及びs=sxにおいてγAB(j、k、s)がピーク値を有した場合、現在時刻toにおける超音波プローブ21は時刻tmに対しp方向にjxボクセル、q方向に対しkxボクセル、r方向に対しsxボクセルだけ移動したものとして検出される。但し、上式(1)におけるNは、3次元演算領域Hにおけるp方向のボクセル数P、q方向のボクセル数Q及びr方向のボクセル数Rの積を示している。
【0036】
一方、図1の位置情報記憶部42は図示しない情報記憶部と情報比較部を備え、前記情報記憶部には、表示部6において表示される時刻tm(m=1乃至4)の3次元画像データImに対し入力部7が設定した関心領域Rmの前記3次元画像データImにおける位置座標と関心領域Rmの設定時刻tmにおける超音波プローブ21の位置情報が関心領域Rmの識別情報と共に保存される。
【0037】
この場合、関心領域Rmの設定時刻tmにおいてプローブ位置検出部41が検出した超音波プローブ21の位置情報(xm、ym、zm)及び3次元画像データImに設定された関心領域Rmの位置座標(即ち、図3に示す超音波プローブ21の中心軸をr軸とした直交座標(p−q−r)における位置座標)(pm、qm、rm)が関心領域Rmの識別情報と共に保存され、更に、上述の関心領域設定時刻tm等の情報も必要に応じて保存される。尚、超音波プローブ21の位置情報(xm、ym、zm)として、例えば、振動素子配列面の中心位置座標が好適であるが、後述する関心領域Rmの位置座標変換に要求されるのは超音波プローブ21の相対的な位置情報(移動情報)であるため特に限定されない。
【0038】
一方、前記情報比較部は、入力部7によって新たに設定された関心領域の位置座標及び超音波プローブ21の位置情報と前記情報記憶部において既に保存されている関心領域Rmの位置座標(pm、qm、rm)及び超音波プローブ21の位置情報(xm、ym、zm)とを比較し、同一の関心領域位置座標及びプローブ位置情報を有する関心領域が新たに設定された場合、同一関心領域の設定を示す文言を表示するための指示信号を表示部6へ供給すると共に、新たな関心領域位置情報の前記情報記憶部における保存を拒否する。
【0039】
一方、関心領域位置情報変換部43は、図示しない演算処理部を有し、座標(xm、ym、zm)(m=1乃至4)の超音波プローブ21によって収集された時刻tmの3次元画像データImにおける関心領域Rmの位置座標(pm、qm、rm)を座標(xo、yo、zo)の超音波プローブ21によって収集された現在時刻toの3次元画像データIoにおける位置座標(pom、qom、rom)へ変換する機能を有している。
【0040】
図5は、被検体周囲に形成された3次元空間(x−y−z)の座標(xm、ym、zm)に配置された超音波プローブ21により時刻tmにて収集される3次元画像データImの表示領域Cmと座標(xo、yo、zo)へ移動した超音波プローブ21により現在時刻toにて収集される3次元画像データIoの表示領域Coを示している。
【0041】
そして、時刻tmにて収集された3次元画像データImの位置座標(pm、qm、rm)に関心Rmが設定された場合、関心領域位置情報変換部43の演算処理部は、上述の位置情報記憶部42に保存された関心領域Rmの3次元画像データImにおける位置座標(pm、qm、rm)と関心領域Rmの設定時tmにおける超音波プローブ21の位置情報(xm、ym、zm)を読み出し、更に、プローブ位置情報検出部41から供給される現在時刻toにおける超音波プローブ21の位置情報(xo、yo、zo)を受信する。
【0042】
次いで、前記演算処理部は、超音波プローブ21の時刻tmにおける位置情報(xm、ym、zm)及び現在時刻toにおける位置情報(xo、yo、zo)に基づいて関心領域Rmの位置座標(pm、qm、rm)を変換処理し、現在時刻toの3次元画像データIoにおける関心領域Rmの位置座標(pom、qom、rom)を算出する。
【0043】
この場合、3次元画像データIoにおける関心領域Rmの位置座標(pom、qom、rom)は次式(2)に基づいて算出される。尚、図5では、説明を簡単にするために、関心領域R1乃至R4の中の1つを関心領域Rmとして示している。
【数2】
【0044】
再び図1へ戻って、関心領域リスト作成部5は、上述の位置情報記憶部42に保存された関心領域Rmの識別情報(関心領域名)を読み出して所定フォーマットの関心領域リストを作成する。図6は、関心領域リストの具体例を示したものであり、この関心領域リストLxには、超音波プローブ21を順次移動させながら収集した3次元画像データI1乃至I4に対し入力部7が設定した関心領域R1乃至R4の識別情報(関心領域名)が一覧表示されている。又、図6に示すように、3次元画像データIm(m=1乃至4)における関心領域Rmの位置座標(pm、qm、rm)や関心領域Rmの設定時tmにおける超音波プローブ21の位置情報(xm、ym、zm)、更には、関心領域Rmの設定時刻tm等を上述の関心領域Rmの識別情報に対応させて一覧表示することにより関心領域リストLxを用いた関心領域Rmの選択を容易かつ的確に行なうことが可能となる。
【0045】
そして、表示部6のモニタ63に表示された上述の関心領域リストLxに示されている関心領域Rmの識別情報の中から、例えば、関心領域R2が選択された場合、システム制御部8を介して上述の選択信号を受信した画像データ生成部3は、ボリュームデータ記憶部25に保存されている各種ボリュームデータの中から関心領域R2の識別情報を有するボリュームデータを読み出す。そして、得られたボリュームデータを処理して3次元画像データあるいはMPR画像データを生成し、表示部6のモニタ63に表示する。
【0046】
この場合、操作者は、関心領域リストLxにおいて選択された関心領域R2を含む3次元画像データやMPR画像データを瞬時に観察することができる。そして、同様の手順を関心領域リストLxに示された他の関心領域に対しても行なうことにより、現在時刻toの3次元画像データIoに重畳表示されている関心領域Rmと関心領域Rmを設定する際に用いた3次元画像データImとの対応付けが容易となり、従って、3次元画像データIoに重畳された関心領域R1乃至R4の中から後続検査に好適な関心領域を容易に選択することができる。
【0047】
次に、表示部6は、画像データ生成部3が生成した時系列的な3次元画像データを表示する機能と、位置情報処理部4により現在時刻toの3次元画像データIoにおける座標(pom、qom、rom)へ座標変換された関心領域Rmを前記3次元画像データIoに重畳して表示する機能と、表示部6に表示された関心領域リストに基づいて入力部7が選択した関心領域に対応するボリュームデータを用いて画像データ生成部3が生成した3次元画像データあるいはMPR画像データを表示する機能と、関心領域リスト作成部5が作成した関心領域リストを表示する機能と、位置情報処理部4の位置情報記憶部42から供給される指示信号に従って同一関心領域の設定を示す文言を表示する機能を有し、表示データ生成部61、変換処理部62及びモニタ63を備えている。
【0048】
表示データ生成部61は、画像データ生成部3の3次元画像データ生成部31から供給される3次元画像データImに対して入力部7が設定した関心領域Rmの位置座標(pm、qm、rm)あるいは位置情報処理部4の関心領域位置情報変換部43によって座標変換された関心領域Rmの位置座標(pom、qom、rom)に基づき、現在時刻toにおいて収集された3次元画像データIoに所定形状の関心領域Rmを重畳して表示データを生成する。一方、変換処理部62は、表示データ生成部61が生成した上述の表示データに対しD/A変換とテレビフォーマット変換を行なってモニタ63に表示する。
【0049】
又、入力部7から供給される関心領域の選択信号に基づいて画像データ生成部3が生成した3次元画像データあるいはMPR画像データに対しても同様の手順により関心領域を重畳してモニタ63に表示し、更に、関心領域リスト作成部5が作成した関心領域リスト等の表示もモニタ63において行なう。
【0050】
次に、入力部7は、操作パネル上にタッチコマンドスクリーン等の表示パネルやキーボード、スイッチ、選択ボタン、マウス等の入力デバイスを備えたインターラクティブなインターフェースであり、画像データ生成部3において生成され表示部6のモニタ63に表示された当該被検体の3次元画像データIm(m=1乃至4)に対して関心領域Rmを設定する関心領域設定機能71と関心領域リスト作成部5において作成され表示部6のモニタ63に表示された関心領域リストの中から所望の関心領域を選択する関心領域選択機能72を有している。
【0051】
更に、被検体情報の入力、ボリュームデータ収集条件の設定、画像データ生成条件及び画像データ表示条件の設定、関心領域リスト作成条件の設定、各種コマンド信号の入力等も上述の入力デバイスや表示パネルを用いて行なわれる。
【0052】
一方、システム制御部8は、図示しないCPUと記憶回路を備え、前記記憶回路には、入力部7において入力あるいは設定された上述の各種情報が保存される。そして、前記CPUは、上述の入力情報及び設定情報に基づいて超音波診断装置100の各ユニットを統括的に制御し、3次元画像データの生成及び3次元画像データImの検査対象部位に対する関心領域Rmの設定と超音波プローブ21の移動に伴って変化する現在時刻toの3次元画像データIoに対する前記関心領域Rmの自動設定を実行させる。
【0053】
次に、現在時刻toに先行する時刻tm(m=1乃至4)の3次元画像データImに対して設定された関心領域Rmを現在時刻の3次元画像データに対して自動設定する際に表示部6において3次元画像データと共に表示される関心領域Rmにつき図7を用いて説明する。但し、図7では、説明を簡単にするために図5の場合と同様にして関心領域R1乃至R4の中の1つを関心領域Rmとして示し、時刻tmの3次元画像データImに設定された関心領域Rmを現在時刻tα及び現在時刻tβの各々において収集された3次元画像データIα及び3次元画像データIβに対して自動設定する場合について述べる。
【0054】
尚、図7において、図7(a−1)乃至図7(a−3)は、超音波プローブ21の移動方向と移動後の超音波プローブ21によって収集される3次元画像データの表示領域を示しており、図7(b−1)乃至図7(b−3)は、図7(a−1)乃至図7(a−3)の超音波プローブ21によって収集され表示部6のモニタ63に表示される3次元画像データとこの3次元画像データに対して重畳表示される関心領域を示している。
【0055】
即ち、図7(a−1)は、座標(xm、ym、zm)に配置された超音波プローブ21により時刻tmにて収集される3次元画像データImの表示領域Cmと表示部6に表示された3次元画像データImに対して入力部7が設定した関心領域Rmの位置座標(pm、qm、rm)を示しており、図7(b−1)は、このとき表示部6に表示される3次元画像データIm及び関心領域Rmを示している。
【0056】
一方、図7(a−2)は、超音波プローブ21を座標(xα、yα、zα)へ移動することにより収集された現在時刻tαにおける3次元画像データIαの表示領域Cαとこの3次元画像データIαに対して自動設定される関心領域Rmの位置座標(pαm、qαm、rαm)を示しており、図7(b−2)は、このとき表示部6に表示される3次元画像データIαを示している。
【0057】
この場合、時刻tmの3次元画像データImに対して設定された関心領域Rmの位置座標(pm、qm、rm)は位置情報処理部4の関心領域位置情報変換部43により3次元画像データIαにおける位置座標(pαm、qαm、rαm)に変換され、この位置座標(pαm、qαm、rαm)が、3次元画像データIαの表示領域Cαに含まれない場合には、図7(b−2)に示すように関心領域Rmは3次元画像データIαに対して重畳表示されない。
【0058】
又、図7(a−3)は、超音波プローブ21を上述の座標(xα、yα、zα)から座標(xm、ym、zm)に近接した座標(xβ、yβ、zβ)へ移動することによって収集される現在時刻tβにおける3次元画像データIβの表示領域Cβとこの3次元画像データIβに対して自動設定される関心領域Rmの位置座標(pβm、qβm、rβm)を示しており、図7(b−3)は、このとき表示部6に表示される3次元画像データIβ及び関心領域Rmを示している。
【0059】
この場合も、時刻tmの3次元画像データImに対して設定された関心領域Rmの位置座標(pm、qm、rm)は位置情報処理部4の関心領域位置情報変換部43により3次元画像データIβにおける位置座標(pβm、qβm、rβm)に変換され、この位置座標(pβm、qβm、rβm)が、3次元画像データIβの表示領域Cβに含まれる場合には、図7(b−3)に示すように関心領域Rmは3次元画像データIβに対して重畳表示される。
【0060】
(関心領域の自動設定手順)
次に、本実施例における関心領域の自動設定手順につき図8のフローチャートに沿って説明する。
【0061】
当該被検体の超音波検査に先立ち、超音波診断装置100の操作者は入力部7において被検体情報を入力した後、ボリュームデータ収集条件の設定、画像データ生成条件及び画像データ表示条件の設定、関心領域リスト作成条件の設定等を行なう。そして、これらの入力情報や設定情報はシステム制御部8の記憶回路に保存される(図8のステップS1)。
【0062】
上述の初期設定が終了したならば、操作者は、超音波プローブ21の先端部を被検体150の体表面に接触させた状態で入力部7より画像データ生成開始コマンドを入力し、このコマンド信号がシステム制御部8に供給されることにより被検体150に対するボリュームデータの収集及び保存と前記ボリュームデータに基づく3次元画像データの生成及び表示が開始される(図8のステップS2及びステップS3)。
【0063】
即ち、システム制御部8を介して上述の画像データ生成開始コマンドを受信した送受信部22のレートパルス発生器223は、システム制御部8から供給される基準信号を分周してレートパルスを生成し送信遅延回路224に供給する。送信遅延回路224は、所定の深さに超音波を集束するための集束用遅延時間と、最初の送受信方向(θ1、φ1)に超音波を送信するための偏向用遅延時間を前記レートパルスに与え、このレートパルスをNチャンネルの駆動回路225へ供給する。次いで、駆動回路225は、送信遅延回路224から供給されたレートパルスに基づいて駆動信号を生成し、この駆動信号を超音波プローブ21におけるN個の振動素子に供給して被検体150の体内に超音波パルスを放射する。
【0064】
放射された超音波パルスの一部は、音響インピーダンスの異なる臓器境界面や組織にて反射し、上述の振動素子により受信されてNチャンネルの電気的な受信信号に変換される。次いで、これらの受信信号は、プリアンプ226にて増幅された後A/D変換器227においてデジタル信号に変換され、更に、受信遅延回路228にて所定の深さからの受信超音波を集束するための集束用遅延時間と送受信方向(θ1、φ1)からの受信超音波に対し強い受信指向性を設定するための偏向用遅延時間が与えられた後加算器229にて整相加算される。
【0065】
そして、整相加算後の受信信号が供給された受信信号処理部23の包絡線検波器231及び対数変換器232は、この受信信号に対して包絡線検波と対数変換を行なってBモードデータを生成し、ボリュームデータ生成部24の超音波データ記憶部241に送受信方向を付帯情報として保存する。
【0066】
送受信方向(θ1、φ1)におけるBモードデータの生成と保存が終了したならば、システム制御部8は、送受信部22の送信遅延回路224及び受信遅延回路228における遅延時間を制御してθ方向にΔθ、φ方向にΔφずつ順次更新された送受信方向(θf、φg)(θf=θ1+(f−1)Δθ(f=2〜F)、φg=φ1+(g−1)Δφ(g=2〜G))の各々に対して同様の手順で超音波を送受信して被検体150に対し3次元走査を行なう。そして、これらの送受信方向において得られたBモードデータも上述の送受信方向を付帯情報として超音波データ記憶部241に保存する。
【0067】
一方、ボリュームデータ生成部24の補間処理部242は、超音波データ記憶部241から読み出した複数のBモードデータを送受信方向に対応させて配列することにより3次元超音波データを形成し、更に、この3次元超音波データを構成する不等間隔のボクセルを補間処理することによって等方的なボクセルで構成されるボリュームデータを生成する。そして、得られたボリュームデータは、位置情報処理部4のプローブ位置情報検出部41に設けられたデータ記憶部に保存され、更に、ボリュームデータ記憶部25を介して画像データ生成部3の3次元画像データ生成部31へ供給される。
【0068】
次いで、画像データ生成部3の3次元画像データ生成部31は、ボリュームデータ生成部24から供給された上述のボリュームデータをレンダリング処理して3次元画像データを生成し表示部6のモニタ63に表示する(図8のステップS4)。そして、上述のようなボリュームデータ及び3次元画像データの生成を繰り返し行なうことにより、表示部6には時系列的な3次元画像データが略リアルタイムで表示され、プローブ位置情報検出部41のデータ記憶部にはこのとき生成されたボリュームデータが順次保存される。
【0069】
一方、操作者は、表示部6に表示された3次元画像データの観察下で最初の検査対象部位の観察に好適な位置(x1、y1、z1)に超音波プローブ21を配置し、このとき得られた3次元画像データI1の検査対象部位に対し所定形状の関心領域R1を入力部7の関心領域設定機能71を用いて設定する(図8のステップS5)。そして、関心領域R1の設定時刻t1に収集されたボリュームデータ(即ち、3次元画像データI1の生成に用いられたボリュームデータ)は、関心領域R1の識別情報を付帯情報としてデータ収集部2のボリュームデータ記憶部25に保存される(図8のステップS6)。
【0070】
次いで、操作者は、超音波プローブ21を被検体150の体表面に沿って移動させ(図8のステップS7)、画像データ生成部3の3次元画像データ生成部31は、このときボリュームデータ生成部24から供給されるボリュームデータに基づいて現在時刻toの3次元画像データIoを生成する(図8のステップS8)。
【0071】
一方、位置情報処理部4のプローブ位置情報検出部41は、自己のデータ記憶部に保存された複数のボリュームデータの中から近接する2つのボリュームデータを順次読み出し、これらのボリュームデータに対し相互相関処理を行なうことにより現在時刻toにおける超音波プローブ21の位置情報(xo、yo、zo)を検出する(図8のステップS9)。
【0072】
次いで、関心領域位置情報変換部43は、プローブ位置情報検出部41によって検出された関心領域R1の設定時刻t1における超音波プローブ21の位置情報(x1、y1、z1)及び現在時刻toにおける超音波プローブ21の位置情報(xo、yo、zo)に基づき、表示部6において表示された3次元画像データI1に対して入力部7が設定した関心領域R1の位置座標(p1、q1、r1)を座標変換することにより、現在時刻toの3次元画像データIoにおける関心領域R1の位置座標(po1、qo1、ro1)を算出する(図8のステップS10)。
【0073】
そして、表示部6は、現在時刻toにおいて画像データ生成部3が生成した3次元画像データIoの位置座標(po1、qo1、ro1)に関心領域R1を重畳して自己のモニタ63に表示する(図8のステップS11)。
【0074】
更に、超音波プローブ21の移動に伴って更新された現在時刻t0における3次元画像データIoの生成、超音波プローブ位置情報(xo、yo、zo)の検出、関心領域R1の位置座標変換、更には、3次元画像データIoと位置座標変換された関心領域R1との重畳表示を繰り返し行なう(図8のステップS7乃至ステップS11)。
【0075】
一方、上述の手順により関心領域R1が自動設定された3次元画像データIoに対して新たな関心領域R2乃至R4を設定する場合、上述のステップS5乃至S11が繰り返し行なわれる。このとき、表示部6には複数の関心領域が重畳された現在時刻toの画像データIoが表示され、これら関心領域の設定時刻において収集されたボリュームデータが関心領域の識別情報を付帯情報としてデータ収集部2のボリュームデータ記憶部25に保存される。
【0076】
即ち、図8に示した関心領域の自動設定手順によれば、入力部7が備えた関心領域設定機能71により関心領域R1が自動設定された現在時刻to1の3次元画像データIoに対する関心領域R2の設定、関心領域R1及びR2が自動設定された現在時刻to2の3次元画像データIoに対する関心領域R3の設定、更には、関心領域R1乃至R3が自動設定された現在時刻to3の3次元画像データIoに対する関心領域R4の設定が順次行なわれる。
【0077】
(関心領域の確認手順)
次に、現在時刻toの3次元画像データIoに対して自動設定された関心領域R1乃至R4の中から後続の超音波検査に好適な関心領域を選択する際の確認手順につき図9のフローチャートを用いて説明する。
【0078】
既に述べたように、図8のステップS5乃至ステップS11を繰り返すことにより、現在時刻toの3次元画像データIoには時刻tm(m=1乃至4)において設定された関心領域Rmが自動設定されて表示部6に表示される。一方、データ収集部2のボリュームデータ記憶部25には、時刻tmのボリュームデータが関心領域Rmの識別情報と共に保存され、位置情報処理部4の位置情報記憶部42には、プローブ位置情報検出部41が検出した時刻tmにおける超音波プローブ21の位置情報(xm、ym、zm)及び入力部7が3次元画像データImに対して設定した関心領域Rmの位置座標(pm、qm、rm)が関心領域Rmの識別情報と共に保存される。
【0079】
このとき、関心領域リスト作成部5は、位置情報記憶部42に保存された上述の各種情報を読み出して関心領域リストを作成し、得られた関心領域リストを表示部6に表示する(図9のステップS21)。
【0080】
一方、操作者は、入力部7の関心領域選択機能72を用いて表示部6の関心領域リストに示された関心領域R1乃至R4の中から、例えば、関心領域R2を選択した場合(図9のステップS22)、システム制御部8を介して上述の選択信号を受信した画像データ生成部3の3次元画像データ生成部31は、ボリュームデータ記憶部25に保存されている各種ボリュームデータの中から関心領域R2の識別情報を有するボリュームデータを読み出す(図9のステップS23)。次いで、得られたボリュームデータをレンダリング処理して3次元画像データI2を生成し、表示部6に表示する(図9のステップS24)。
【0081】
又、MPR画像データの観察が必要な場合、画像データ生成部3のMPR画像データ生成部32は、入力部7からシステム制御部8を介して供給された関心領域R2の選択信号と関心領域リスト作成部5から供給された関心領域R2の位置座標(p2、q2、r2)を受信し、前記選択信号によりボリュームデータ記憶部25から読み出した関心領域R2の識別情報を有するボリュームデータに関心領域R2を設定する。そして、この関心領域R2を含む所定方向のMPR断面に存在するボクセルに基づいてMPR画像データを生成し、表示部6に表示する(図9のステップS25)。
【0082】
更に、3次元画像データIoに示された他の関心領域に対応する3次元画像データやMPR画像データを観察したい場合には、関心領域リストに示された関心領域R1乃至R4の中から所望の関心領域を選択した後、上述のステップS23乃至ステップS25を繰り返すことにより新たに選択した関心領域を含む3次元画像データやMPR画像データの観察が可能となる(図9のステップS22乃至ステップS25)。
【0083】
尚、上述のステップS24における3次元画像データの表示やステップS25におけるMPR画像データの表示に際しては、夫々の画像データの座標(pm、qm、rmに関心領域Rmを重畳して表示することが望ましいが特に限定されない。
【0084】
上述の手順で操作者は関心領域リストに示された関心領域を選択することにより、この関心領域を設定する際に用いた3次元画像データを容易に再生することができるため、現在時刻toの3次元画像データIoに重畳表示されている関心領域R1乃至R4の各々に対応した3次元画像データIo乃至I4の把握が容易となる。従って、関心領域R1乃至R4の中から後続検査に好適な関心領域を容易に選択することができ、この関心領域に基づいて超音波プローブ21を最適な位置に再配置することが可能となる。
【0085】
(変形例)
次に、本実施例の変形例について説明する。上述の実施例では、3次元走査により時系列的に得られるボリュームデータの移動量に基づいて超音波プローブ21の位置情報を検出する場合について述べたが、本変形例では、磁気センサ等によって超音波プローブ21の位置情報を検出する場合について述べる。
【0086】
本変形例における超音波診断装置の全体構成につき図10を用いて説明する。但し、図10において、図1に示した超音波診断装置100の各ユニットと同一の構成及び機能を有するユニットに対しては同一の符号を付加し詳細な説明を省略する。
【0087】
即ち、本変形例の超音波診断装置200は、超音波プローブ21を、例えば、被検体150の体表面に沿って移動させながら超音波による3次元走査を行なってボリュームデータを収集するデータ収集部2と、データ収集部2から供給された所定走査領域のボリュームデータを処理して3次元画像データやMPR画像データを生成する画像データ生成部3と、現在時刻toに先行する時刻tmにおいて収集された3次元画像データImの検査対象部位に設定される関心領域Rmの位置座標(位置情報)を超音波プローブ21の位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoに対する位置座標を算出する位置情報処理部4aと、位置情報処理部4aによって算出された関心領域Rmの位置座標に基づき、画像データ生成部3から供給される現在時刻toの3次元画像データIoに所定形状の関心領域Rmを重畳して表示する表示部6と、被検体情報の入力、ボリュームデータ生成条件の設定、画像データ生成条件及び画像データ表示条件の設定、3次元画像データに対する関心領域の設定、更には、各種コマンド信号の入力等を行なう入力部7と、超音波プローブ21に装着され、この超音波プローブ21の位置や方向(傾斜角度)等を検出するプローブ位置検出部9と、超音波診断装置200が有する上述の各ユニットを統括的に制御するシステム制御部8を備えている。
【0088】
そして、位置情報処理部4aは、図1の超音波診断装置100と同様にして、時刻tmの超音波プローブ21によって収集された3次元画像データImに対して入力部7が設定した関心領域Rmの前記3次元画像データImにおける位置座標及びプローブ位置情報検出部9によって検出された時刻tmにおける超音波プローブ21の位置情報を記憶する位置情報記憶部42と、プローブ21の位置情報に基づいて関心領域Rmの位置座標を変換処理することにより、現在時刻toの超音波プローブ21に形成された座標系における関心領域Rmの位置座標を算出する関心領域位置情報変換部43を備えている。
【0089】
一方、プローブ位置情報検出部9は、超音波プローブ21の傾斜角度、移動方向及び移動量等を検出する機能を有している。超音波プローブ21の位置情報検出法として各種の方法が提案されているが、検出精度、コスト及び大きさ等を考慮した場合超音波センサあるいは磁気センサを用いる方法が好適である。例えば、磁気センサを有したプローブ位置情報検出部9は、特開2000−5168号公報等に記載されているように磁気を発生するトランスミッタ(磁気発生部)と、この磁気を検出する複数の磁気センサを有したレシーバと、検出された磁気に基づく電気信号(検出信号)を処理して超音波プローブ21の傾きや位置に関する情報を算出する位置情報算出部(何れも図示せず)を備えている。
【0090】
磁気センサを有したレシーバは、通常、超音波プローブ21の表面に装着され、前記トランスミッタは超音波プローブ21の近傍に設置される。そして、前記位置情報算出部は、磁気によって計測された複数からなる磁気センサの各々とトランスミッタとの距離に基づいて超音波プローブ21の位置情報(即ち、相対的な傾斜角度や位置座標)を算出する。このような超音波センサあるいは磁気センサを用いた方法によれば、上述の実施例に示した方法と比較して超音波プローブ21の操作性は多少劣化するが、相互相関演算等の複雑な演算処理を行なう必要がないためプローブ21の位置情報を短時間で検出することが可能となる。
【0091】
以上述べた本発明の実施例及びその変形例によれば、超音波プローブを移動させながら複数からなる被検体の3次元画像データを時系列的に収集する際、3次元画像データの検査対象部位に対して予め設定した所定形状の関心領域を超音波プローブの移動に伴う3次元画像データの変化に追随させることにより、新たに収集された3次元画像データの対応部位に対し前記関心領域を自動設定することができる。このため、検査対象部位における3次元画像データやMPR画像データの収集が容易となり、被検体に対する検査効率が向上するのみならず、当該超音波検査における操作者の負担が軽減される。
【0092】
又、現在時刻に先行する時刻の3次元画像データに対して予め設定された複数の関心領域が現在時刻の3次元画像データに対して自動設定された場合、これらの関心領域が一覧表示された関心領域リストにて選択された所望の関心領域に対応する3次元画像データを瞬時に観察することができるため、現在時刻の3次元画像データに重畳表示されている関心領域とこの関心領域を設定する際に用いた3次元画像データとの対応付けが容易となり、従って、前記3次元画像データに自動設定された関心領域の中から後続検査に好適な関心領域を容易に選択することができる。
【0093】
更に、関心領域リストにおいて選択された関心領域に対応するボリュームデータに基づいて上述の3次元画像データの他に前記関心領域を含むMPR画像データの生成と表示が可能となるため、後続検査に好適な関心領域の選択を更に正確に行なうことができる。
【0094】
一方、超音波センサあるいは磁気センサ等をプローブ位置情報検出部に用いた本実施例の変形例によれば、上述の実施例に示した方法と比較して超音波プローブの操作性は多少劣化するが、相互相関演算等の複雑な演算処理が不要となるためプローブ位置情報の検出を短時間で行なうことが可能となり、従って、比較的速い速度で移動する超音波プローブに対しても関心領域の自動設定が容易となる。
【0095】
以上、本発明の実施例及びその変形例について述べてきたが、本発明は、上述の実施例及びその変形例に限定されるものではなく、更に変形して実施することが可能である。例えば、上述の実施例及びその変形例では、M(M=4)個の関心領域Rm(m=1乃至4)が時刻tmの3次元画像データImに対して設定され、これらの関心領域Rmが現在時刻toの3次元画像データIoに対して自動設定される場合について述べたが、3次元画像データIoに自動設定される関心領域の数は4つに限定されるものではなく、例えば、M=1個であっても構わない。
【0096】
又、図8に示したように、関心領域が自動設定された現在時刻toの3次元画像データIoに対して新たな関心領域を設定する場合について述べたが、現在時刻toまでに設定された複数の関心領域を現在時刻toの3次元画像データIoに対して一括自動設定してもよい。
【0097】
更に、関心領域リスト作成部5によって作成された関心領域リストや同一関心領域が設定された旨を示す文言を表示部6に表示する場合について述べたが、別途設けられた表示部あるいは入力部7に備えられた表示パネル等に表示してもよく、警告音や警告ランプの点滅等の手段によって同一関心領域が設定された旨を操作者に報知しても構わない。
【0098】
一方、上述の実施例におけるプローブ位置情報検出部41は、ボリュームデータに対して相互相関法を適用することにより超音波プローブ21の位置情報を検出する場合について述べたが、異なる時刻において収集された近接する2つのボリュームデータの差分値を求め、この差分値の絶対値和あるいは2乗和が最小となるシフト方向及びシフト量に基づいて超音波プローブ21の位置情報を検出してもよく、又、エントロピー法等の他の方法を適用してもよい。
【0099】
又、上述の実施例及びその変形例における関心領域リスト作成部5は、関心領域識別情報(関心領域名)、超音波プローブ21の位置情報、関心領域Rmの位置座標等に基づいて関心領域リストを作成する場合について述べたが、これに限定されるものではなく、例えば、関心領域識別情報のみから作成してもよい。
【0100】
一方、上述の実施例及びその変形例では、N個の振動素子が2次元配列されたセクタ走査用の超音波プローブ21を用いてボリュームデータを収集する場合について述べたが、前記ボリュームデータは、振動素子が2次元配列されたリニア走査対応、コンベックス走査対応、ラジアル走査対応等の超音波プローブを用いて収集してもよく、又、振動素子が1次元配列された超音波プローブを所定の方向へ機械的に高速移動させることによりボリュームデータの収集を行なってもよい。
【0101】
更に、上述のボリュームデータはBモードデータに基づいて生成される場合について述べたが、カラードプラデータ等の他の超音波データに基づいて生成されたものであってもよい。
【符号の説明】
【0102】
2…データ収集部
21…超音波プローブ
22…送受信部
23…受信信号処理部
24…ボリュームデータ生成部
25…ボリュームデータ記憶部
3…画像データ生成部
31…3次元画像データ生成部
32…MPR画像データ生成部
4、4a…位置情報処理部
41…プローブ位置情報検出部
42…位置情報記憶部
43…関心領域位置情報変換部
5…関心領域リスト作成部
6…表示部
61…表示データ生成部
62…変換処理部
63…モニタ
7…入力部
71…関心領域設定機能
72…関心領域選択機能
8…システム制御部
9…プローブ位置情報検出部
100、200…超音波診断装置
【特許請求の範囲】
【請求項1】
被検体に対する3次元走査によって収集したボリュームデータに基づいて画像データを生成する超音波診断装置において、
前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し、前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成手段と、
前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出手段と、
前記第1の3次元画像データに対して関心領域を設定する関心領域設定手段と、
前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換手段と、
座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示手段とを
備えたことを特徴とする超音波診断装置。
【請求項2】
前記プローブ位置情報検出手段は、前記超音波プローブの移動に伴って時系列的に収集される前記ボリュームデータの移動量に基づいて前記超音波プローブの位置情報を検出することを特徴とする請求項1記載の超音波診断装置。
【請求項3】
前記プローブ位置情報検出手段は、前記超音波プローブに装着された超音波センサあるいは磁気センサによって前記超音波プローブの位置情報を検出することを特徴とする請求項1記載の超音波診断装置。
【請求項4】
前記プローブ位置情報検出手段は、前記超音波プローブの位置及び方向を前記位置情報として検出することを特徴とする請求項1記載の超音波診断装置。
【請求項5】
前記第1の3次元画像データに対して前記関心領域設定手段が設定した複数の関心領域を示す関心領域リストを作成する関心領域リスト作成手段と、前記関心領域リストに示された複数の関心領域の中から所望の関心領域を選択する関心領域選択手段を備え、前記画像データ生成手段は、選択された前記関心領域に対応する3次元画像データあるいはMPR(Multi Planar Reconstruction)画像データを生成することを特徴とする請求項1記載の超音波診断装置。
【請求項6】
前記第1の撮影領域において収集されたボリュームデータを保存するボリュームデータ記憶手段を備え、前記画像データ生成手段は、前記関心領域選択手段によって選択された前記関心領域に対応する前記第1の撮影領域のボリュームデータを前記ボリュームデータ記憶手段から読み出し、得られた前記ボリュームデータを処理して前記3次元画像データあるいは前記MPR画像データを生成することを特徴とする請求項5記載の超音波診断装置。
【請求項7】
前記表示手段は、前記関心領域選択手段によって選択された前記関心領域を前記3次元画像データあるいは前記MPR画像データに重畳して表示することを特徴とする請求項5記載の超音波診断装置。
【請求項8】
報知手段を備え、前記関心領域設定手段が前記第1の3次元画像データの同一部位に対して関心領域を設定した場合、前記報知手段は、その旨を示す文言、警告音あるいは警告ランプの少なくとも何れかにより報知することを特徴とする請求項1記載の超音波診断装置。
【請求項9】
被検体に対する3次元走査により収集したボリュームデータに基づいて画像データを生成する超音波診断装置に対し、
前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成機能と、
前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出機能と、
前記第1の3次元画像データに対して関心領域を設定する関心領域設定機能と、
前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換機能と、
座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示機能を
実行させることを特徴とする関心領域設定用制御プログラム。
【請求項1】
被検体に対する3次元走査によって収集したボリュームデータに基づいて画像データを生成する超音波診断装置において、
前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し、前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成手段と、
前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出手段と、
前記第1の3次元画像データに対して関心領域を設定する関心領域設定手段と、
前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換手段と、
座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示手段とを
備えたことを特徴とする超音波診断装置。
【請求項2】
前記プローブ位置情報検出手段は、前記超音波プローブの移動に伴って時系列的に収集される前記ボリュームデータの移動量に基づいて前記超音波プローブの位置情報を検出することを特徴とする請求項1記載の超音波診断装置。
【請求項3】
前記プローブ位置情報検出手段は、前記超音波プローブに装着された超音波センサあるいは磁気センサによって前記超音波プローブの位置情報を検出することを特徴とする請求項1記載の超音波診断装置。
【請求項4】
前記プローブ位置情報検出手段は、前記超音波プローブの位置及び方向を前記位置情報として検出することを特徴とする請求項1記載の超音波診断装置。
【請求項5】
前記第1の3次元画像データに対して前記関心領域設定手段が設定した複数の関心領域を示す関心領域リストを作成する関心領域リスト作成手段と、前記関心領域リストに示された複数の関心領域の中から所望の関心領域を選択する関心領域選択手段を備え、前記画像データ生成手段は、選択された前記関心領域に対応する3次元画像データあるいはMPR(Multi Planar Reconstruction)画像データを生成することを特徴とする請求項1記載の超音波診断装置。
【請求項6】
前記第1の撮影領域において収集されたボリュームデータを保存するボリュームデータ記憶手段を備え、前記画像データ生成手段は、前記関心領域選択手段によって選択された前記関心領域に対応する前記第1の撮影領域のボリュームデータを前記ボリュームデータ記憶手段から読み出し、得られた前記ボリュームデータを処理して前記3次元画像データあるいは前記MPR画像データを生成することを特徴とする請求項5記載の超音波診断装置。
【請求項7】
前記表示手段は、前記関心領域選択手段によって選択された前記関心領域を前記3次元画像データあるいは前記MPR画像データに重畳して表示することを特徴とする請求項5記載の超音波診断装置。
【請求項8】
報知手段を備え、前記関心領域設定手段が前記第1の3次元画像データの同一部位に対して関心領域を設定した場合、前記報知手段は、その旨を示す文言、警告音あるいは警告ランプの少なくとも何れかにより報知することを特徴とする請求項1記載の超音波診断装置。
【請求項9】
被検体に対する3次元走査により収集したボリュームデータに基づいて画像データを生成する超音波診断装置に対し、
前記被検体の1つあるいは複数からなる第1の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第1の3次元画像データを生成し前記第1の撮影位置と異なる第2の撮影位置における3次元走査によって収集されたボリュームデータに基づいて第2の3次元画像データを生成する画像データ生成機能と、
前記第1の撮影位置及び前記第2の撮影位置における超音波プローブの位置情報を検出するプローブ位置情報検出機能と、
前記第1の3次元画像データに対して関心領域を設定する関心領域設定機能と、
前記第1の3次元画像データにおける前記関心領域の位置座標を前記第1の撮影領域及び前記第2の撮影領域における前記超音波プローブの位置情報に基づいて変換処理し前記第2の3次元画像データにおける位置座標を算出する関心領域位置情報変換機能と、
座標変換された前記関心領域を前記第2の3次元画像データに重畳して表示する表示機能を
実行させることを特徴とする関心領域設定用制御プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−182933(P2011−182933A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−51103(P2010−51103)
【出願日】平成22年3月8日(2010.3.8)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月8日(2010.3.8)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]