
超音波診断装置
【課題】組織の運動方向に合わせてバイプレーンの最適な回転位置を設定する。
【解決手段】バイプレーンである走査面セットは第1走査面S1及び第2走査面S2によって構成される。それぞれの走査面上においてフレーム間での相関処理により注目組織の運動成分が求められる。それらの運動成分により注目組織の移動方向が求められる。その移動方向に第1走査面が合致するように走査面セットが回転駆動される。これにより第1走査面に対応する断層画像上においては常に注目組織が断面として表示されることになる。
【解決手段】バイプレーンである走査面セットは第1走査面S1及び第2走査面S2によって構成される。それぞれの走査面上においてフレーム間での相関処理により注目組織の運動成分が求められる。それらの運動成分により注目組織の移動方向が求められる。その移動方向に第1走査面が合致するように走査面セットが回転駆動される。これにより第1走査面に対応する断層画像上においては常に注目組織が断面として表示されることになる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は超音波診断装置に関し、特に、互いに交差する複数の走査面を形成する超音波診断装置に関する。
【背景技術】
【0002】
バイプレーンプローブは、第1走査面とそれに直交する第2走査面とを形成する超音波探触子である。例えば、従来のバイプレーンプローブ(例えば体腔内挿入型プローブ)は、プローブ軸方向に平行に形成された第1アレイ振動子と、プローブ軸と直交する方向に形成された第2アレイ振動子とを有する。第1アレイ振動子によって第1走査面が形成され、それにより得られた第1走査面データに基づいて第1断層画像が形成され、これと同様に、第2アレイ振動子によって第2走査面が形成され、それにより得られた第2走査面データに基づいて第2断層画像が形成される。それらの断層画像は同時表示され、注目組織が直交する二断面をもって観察される。1つの断層画像では、注目組織についてある平面内についての構造やサイズを観察できるが、その平面の前後方向について注目組織の構造やサイズを認識することはできない。上記のようなバイプレーン技術を利用することによって、もう1つの断層画像上において、注目組織の奥行き方向についても構造やサイズを観察できる。なお、各走査面は超音波ビームを電子走査することによって形成されるものであるが、超音波ビームが機械走査される場合もある。
【0003】
超音波ビームを二次元走査してボリュームデータを取込み、これにより注目組織の三次元画像を形成することによって、注目組織について立体的な観察を行える。しかし、そのために2Dアレイ振動子を利用して極めて多くの送受信チャンネル(送信器、受信器)を用いて超音波の送受信を行うと、そのための電子回路の規模が膨大となる。よって、実用化までになお幾つかの問題が残されている。これに対し、上記のバイプレーン技術によれば、三次元画像を形成することはできないものの、注目組織を擬似的に三次元観察できるという利点がある。
【0004】
以下の特許文献1には、互いに平行な複数の走査面を形成して三次元画像を構築する場合に、手振れなどに起因して各走査面間の生じる画像の位置ずれを解消するために、画像間で相関演算を行って画像相互を位置決めする技術が開示されている。しかし、バイプレーンあるいは運動組織への追従制御については記載されていない。なお、本願に関連する未公開の先願として、特願2003−427400号がある。
【0005】
【特許文献1】特開平8−332187号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、バイプレーン技術によって運動する注目組織(例えば心臓)の超音波診断を行う場合、注目組織の運動によって注目組織が2つの走査面から外れてしまうという問題がある。つまり、2つの走査面に対応する2つの断層画像のいずれにおいても、注目組織が表示されなくなり、あるいは、その表示が維持されていても目的部位以外しか観察できなくなる。その結果、バイプレーンを計測のために利用する場合、注目組織についての計測精度が低下する。一方、バイプレーンを注目組織の横断面位置及び縦断面位置に適正に位置決めすることが要望されている。
【0007】
本発明の目的は、注目組織の運動方向に応じて互いに交差する複数の走査面を位置決めできるようにすることにある。
【0008】
本発明の他の目的は、互いに交差する複数の走査面を注目組織の第1断面位置及び第2断面位置に適正に位置決めできるようにすることにある。
【課題を解決するための手段】
【0009】
(1)本発明は、互いに交差する第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データに基づいて、注目組織の移動情報を演算する移動情報演算手段と、前記走査面セットを回転させる回転機構を有し、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる位置決め手段と、を含むことを特徴とする。
【0010】
上記構成によれば、互いに交差関係(望ましくは直交関係)にある第1走査面データ及び第2走査面データに基づいて注目組織の移動情報が演算される。ここで、注目組織は、画像化される組織全体であってもよいし、特定の組織部分であってもよい。移動情報は、少なくとも走査面セットの適正な回転角度を決定するために用いられる情報を含み、移動方向(移動角度)の情報であってもよいし、三次元ベクトル(三次元の移動方向と移動量を特定する情報)であってもよい。望ましくは、各走査面ごとに時間的に隣接するフレーム間において走査面データの相関演算などが実行され、これにより各走査面上における注目組織の移動成分(運動成分)が特定され、それらの移動成分から移動情報が演算される。もちろん、フレーム間相関演算の手法以外の手法を用いて移動情報を演算することも可能である。移動情報に基づいて走査面セット(望ましくは直交関係にあるバイプレーン)が回転駆動され、一方の走査面が注目組織の移動方向に適合される。仮に、注目組織が直線的な往復運動をするものであれば、走査面セットの位置は固定的となり、一方の走査面上において常に注目組織が観察されることになる。他方の走査面上においては、注目組織の運動位置に応じて、組織断面が現れる。これに関し、他方の走査面を注目組織の運動に合わせて揺動運動(傾斜運動)、平行運動などさせれば、他方の走査面上においても常に注目組織を観察することが可能となる。注目組織が非直線運動する場合には、リアルタイムで走査面セットの位置を更新するようにすれば、つまりリアルタイムで走査面セットの位置決めを行えば、少なくとも一方の走査面上において注目組織をトラッキングできる。位置決め手段は、電子的に走査面セットを回転させるものであってもよいが、より簡便には、機械的に走査面セットを回転させる機構を採用するのが望ましい。
【0011】
上記構成を有する超音波診断装置を放射線治療装置と組み合わせて治療システムを構築することも可能であり、その場合には、超音波診断によって注目組織(治療ターゲット組織)を超音波画像として常に表示でき、あるいは、その注目組織の位置をリアルタイムに精度よく特定できる。
【0012】
望ましくは、前記回転機構は、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させる。各走査面は矩形、扇状などの形態を有する。プローブの初期位置決め時に、送受波の中心線上に注目組織ができるだけ位置決めされるようにするのが望ましい。
【0013】
望ましくは、前記アレイ振動子は超音波探触子内に設けられ、前記回転機構は、前記超音波探触子内に設けられ、前記アレイ振動子を回転させる機構である。この構成によれば、超音波探触子それ自体の姿勢を維持しつつ走査面セットを回転させることができる。超音波探触子は使用者によって把持され、あるいはロボットに保持される。
【0014】
望ましくは、前記アレイ振動子は超音波探触子内に設けられ、前記回転機構は、前記超音波探触子を回転させる機構である。望ましくは、前記超音波探触子を保持し、前記超音波探触子の位置を調整するアーム機構が設けられる。回転機構はアーム機構の先端部に設けるのが望ましい。
【0015】
望ましくは、前記位置決め手段は、更に、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で他方の走査面の位置を変更する手段を含む。この構成によれば、注目組織の運動に合わせて他方の走査面の位置を追従制御することが可能となり、2つの断層画像上において注目組織を常に画像化することが可能となる。
【0016】
望ましくは、前記アレイ振動子は、二次元配列された複数の振動素子で構成され、前記アレイ振動子をX方向に並んだ複数のY方向素子列として機能させるX方向走査用接続パターンと、前記アレイ振動子をY方向に並んだ複数のX方向素子列として機能させるY方向用接続パターンと、を切り換えるスイッチ回路が設けられ、前記X方向走査用接続パターンの選択時に前記第1走査面が形成され、前記Y方向走査用接続パターンの選択時に前記第2走査面が形成される。
【0017】
上記構成によれば、いわゆる2Dアレイ振動子を簡易的なバイプレーン用アレイ振動子として利用することが可能となる。つまり、2Dアレイ振動子をX方向に電子走査するための1Dアレイ振動子として機能させる場合と、2Dアレイ振動子をY方向に電子走査するための1Dアレイ振動子として機能させる場合とを選択できる。各振動素子列を構成する複数の振動素子を電気的に接続すれば送受信チャンネルのリダクションを図れる。
【0018】
望ましくは、前記スイッチ回路は前記アレイ振動子と共に超音波探触子内に設けられる。超音波探触子内で複数の受信信号のグルーピング及び送信信号の分配が行えるので、プローブケーブル内を挿通する信号線の本数を著しく削減できる。
【0019】
望ましくは、前記アレイ振動子はクロスリニアアレイ振動子である。第1走査面と第2走査面とは基本的に両者が中心線上でクロスする直交関係を有する。クロスリニアアレイ振動子を用いれば、注目組織を縦断面及びそれにクロスする横断面として観察することができる。
【0020】
(2)本発明は、直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データの内で少なくとも一方の走査面データに基づいて注目組織の移動情報を演算する移動情報演算手段と、前記移動情報に基づいて、前記走査面セットの回転角度を演算する手段と、前記回転角度を演算する手段の演算結果に基づいて、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させ、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる回転機構と、前記第1走査面データに基づいて第1断層画像を形成し、前記第2走査面データに基づいて第2断層画像を形成する画像形成部と、を含むことを特徴とする。
【0021】
望ましくは、前記回転角度を演算する手段は、前記第1走査面データに基づいて前記第1走査面上における注目組織の移動成分を演算する手段と、前記第2走査面データに基づいて前記第2走査面上における注目組織の移動成分を演算する手段と、前記第1走査面上における注目組織の移動成分と前記第2走査面上における注目組織の移動成分とに基づいて前記走査面セットの回転角度を求める手段と、を含む。
【0022】
(3)本発明は、直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、前記第1走査面を試行的に回転走査させた場合において、各回転角度ごとに第1走査面データに基づいて注目組織について計測を行う手段と、前記各回転角度ごとの注目組織についての計測結果に基づいて前記走査面セットの適正回転角度を判定する手段と、前記走査面セットをその適正回転角度に位置決めし、これにより、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の横断面位置に位置決めし、且つ、前記第1走査面及び前記第2走査面の内で他方の走査面を前記注目組織の縦断面位置に位置決めする手段と、を含む。
【0023】
上記構成によれば、走査面セットを構成する2つの走査面を注目組織の縦断面位置と横断面位置に自動的に且つ適正に位置決めできる。このため、注目組織のバイプレーン観察に当たってその便宜を図ることができ、また臓器の面積や体積などの計測を行う場合にその計測精度を向上できる。少なくとも第1走査面データに基づいて適正回転角度が求められるが、更に第2走査面データを用いるようにしてもよい。
【0024】
望ましくは、前記計測結果は前記注目組織の軸長である。軸長は例えば注目組織の輪郭の直径あるいは所定方向のサイズとして定義される。望ましくは、前記計測結果は前記注目組織の面積である。注目組織を構成するピクセル数のカウントによって面積を求めることもできる。
【発明の効果】
【0025】
以上説明したように、本発明によれば、注目組織の運動方向に応じて互いに交差する複数の走査面を位置決めできる。本発明によれば、互いに交差する複数の走査面を注目組織に対して適正に位置決めできる。
【発明を実施するための最良の形態】
【0026】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0027】
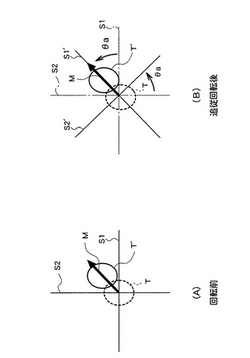
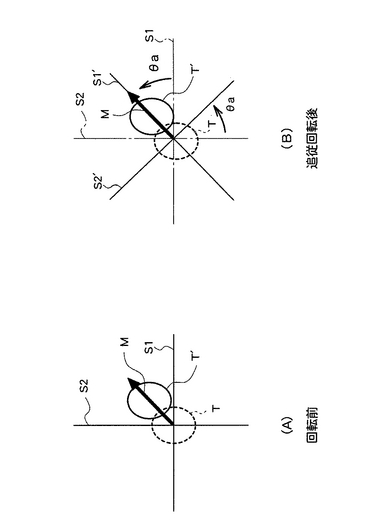
図1には、本実施形態の原理が概念図として示されている。図1における(A)及び(B)は中心線上で直交する2つの走査面を表しており、それらの2つの走査面によって走査面セット(バイプレーン)が構成されている。(A)にはその走査面セットを回転させる前の初期状態が示されており、(B)にはその走査面セットを注目組織の運動方向に合わせて回転させた後の適合状態が示されている。
【0028】
(A)において、走査面S1と走査面S2は同時に又は時分割で交互に形成されるものであって、それらは中心軸上において互いに90度の角度をもって交差している。なお、(A)及び(B)に示される図は、例えば送受波原点から深さ方向に観察した2つの走査面S1,S2を表している(走査面セットは十字形に現れている)。注目組織Tは運動臓器であって、その注目組織の運動方向がベクトルMとして表されている。ここでは説明のために注目組織Tが直線的に往復運動をする場合を想定している。
【0029】
注目組織Tがある一定時間後に符号T’として示される位置に移動した場合、(A)に示す状態では、走査面S1及び走査面S2のいずれにおいても注目組織は観察できなくなってしまう。そこで、本実施形態においては、注目組織の運動方向(運動角度)を判定し、その運動方向に一方の走査面(ここでは走査面S1)を合わせることにより、上記の問題に対処している。すなわち、注目組織の運動方向Mが特定されると、走査面セットそれ全体がその運動方向に相当する角度分だけ回転駆動される。その状態が(B)に示されている。ここでは、2つの走査面S1,S2はそれぞれ回転後の状態においてS1’S2’として表されている。回転角度はθaで表されている。
【0030】
このように、走査面セットの全体を必要な角度だけ回転させれば、一方の走査面S1’上において常に注目組織をその運動位置に関わらず断面(運動方向を含む断面)として観察することができるようになり、その結果、いずれの断層画像上においても注目組織を観察できなくなってしまう問題を解消できる。また、例えば超音波診断装置と放射線治療装置とを組み合わせて治療システムを構成した場合において、注目組織の運動をより正確に把握することができるので、治療用の放射線の照射先を精度良く特定できるという利点がある。ちなみに、(B)に示す状態において、他方の走査面S2’上においては時相に応じて注目組織の断面(その運動方向と直交する断面)が間欠的に現れることになる。なお、その走査面S2’上においても常に注目組織をトラッキングさせたい場合には注目組織の運動に合わせて走査面S2’を揺動運動あるいは平行運動させるようにすればよい。この場合においては、注目組織の運動情報として、運動方位(角度)の他に当該方向における運動量の情報を特定すればよい。
【0031】
ちなみに、2つの走査面はそれぞれ超音波ビームの電子走査によって形成され、その電子走査方式としては電子セクタ走査、電子リニア走査などをあげることができる。この場合において、それらの走査面を形成するために、後述するようなクロスリニアアレイ振動子を用いることができ、あるいは2Dアレイ振動子を用いることができる。走査面セットの回転を行うための機構あるいは手段に関しては後に説明する。
【0032】
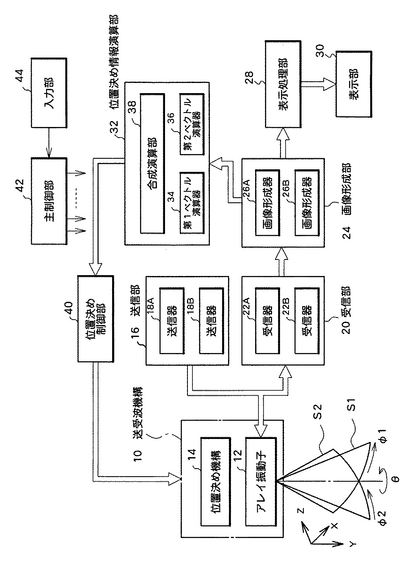
図2には、本実施形態に係る超音波診断装置の全体構成がブロック図として示されている。送受波機構10は、図2に示される構成例において、アレイ振動子12と位置決め機構14とを有している。アレイ振動子12はクロスリニアアレイ振動子あるいは2Dアレイ振動子などであって、そのアレイ振動子12によって図2に示されるように第1走査面S1及び第2走査面S2が形成される。ここでそれらの2つの走査面S1,S2によって走査面セットが構成され、その走査面セットは中心軸上で回転駆動され、その回転方向がθで表されている。
【0033】
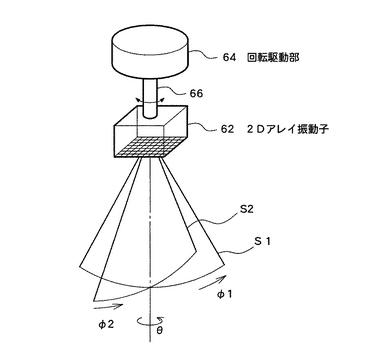
第1走査面S1はφ1方向に超音波ビームを走査することによって形成され、これと同様に、第2走査面S2はφ2方向に超音波ビームを電子走査することによって形成される。X−Y−Zは送受波空間としての三次元空間を表している。なお、電子的な偏向制御を適用して、必要に応じて、第1走査面S1をφ2方向に傾斜させ、あるいは、第2走査面S2をφ1方向に傾斜させるようにしてもよい。図1では、両走査面が傾斜角度ゼロで直交している(つまり各走査面の中心線が合致している)状態が示されている。
【0034】
位置決め機構14は、上述したように、注目組織の運動方向に合わせて走査面セットを位置決めするための機構であり、その位置決め機構14としては多様な構成例をあげることができる。例えば、アレイ振動子12を超音波探触子内で回転させる機構、アレイ振動子12を備えた超音波探触子それ自体を回転させる機構などをあげることができる。これについては後に図3及び図5などを用いて詳述する。
【0035】
送信部16は、送信ビームフォーマーとして機能するものであり、図2に示す例では、2つの走査面S1,S2に対応して2つの送信器18A,18Bが示されている。ただし、単一の送信器を時分割動作させることによって2つの走査面S1,S2を形成することも可能である。
【0036】
受信部20は受信ビームフォーマーとして機能する。図2に示す例では2つの走査面S1,S2に対応して2つの受信器22A,22Bが示されているが、もちろん単一の受信器を時分割動作させるようにしてもよい。いずれにしても、送信部16及び受信部20の作用によって2つの走査面S1,S2が同時あるいは交互に形成されることになる。ここで、各走査面は超音波ビームの電子走査によって形成される。
【0037】
画像形成部24は、デジタルスキャンコンバータ(DSC)などを有し、走査面を構成する複数のビームデータに基づいて断層画像を形成する機能を有する。図2に示す例では、2つの走査面S1,S2に対応して2つの画像形成器26A,26Bが表されているが、もちろん単一の画像形成器を時分割動作させることによって、2つの走査面S1,S2に対応する2つの断層画像(Bモード画像)を時分割で形成するようにしてもよい。なお、二次元カラードプラ画像が白黒断層画像上に合成されたカラーフローマッピング画像を形成することもできる。
【0038】
2つの断層画像のデータは表示処理部28に送られ、その表示処理部28によって合成処理などが実行された後、それらの画像データは表示部30に送られる。表示部30においては、いわゆる2画面同時表示モードにおいて、2つの断層画像が並列的に表示されることになる。主制御部42は、本装置内の各構成の動作制御を行っている。その主制御部42には操作パネルなどによって構成される入力部44が接続されている。
【0039】
位置決め情報演算部32は、上述した走査面セットを回転するための参照情報を演算する手段である。本実施形態において、位置決め情報演算部32は、第1ベクトル演算部34、第2ベクトル演算部36及び合成演算部38を有している。この位置決め情報演算部32は、ハードウエアとして構成することもできるし、ソフトウエアの機能として実現することもできる。
【0040】
第1ベクトル演算部34は、第1走査面S1について、フレーム間において走査面データの相関演算を実行し、これによって第1走査面S1上における組織の移動ベクトル(移動成分)を演算する。これと同様に、第2ベクトル演算部36は、第2走査面S2について、フレーム間において走査面データの相関演算を実行し、これにより第2走査面S2上における組織の移動ベクトル(移動成分)を演算する。なお、走査面データは、送受波フレーム(走査面)を構成する複数のビームデータによって構成されてもよいが、座標変換後の断層画像データであるのが望ましい。
【0041】
2つの走査面S1,S2については、本実施形態において常に直交関係が維持されている。各走査面S1,S2上において二次元の移動ベクトルが特定されると、それらの移動ベクトルに基づいて組織の三次元移動ベクトルを演算することが可能となる。それを行うのが合成演算部38である。ただし、単に走査面セットを回転させるだけのモードが採用される場合には、三次元移動ベクトルを実際に演算する必要はなく、組織の移動方向すなわち回転角度の情報を演算するだけでよい。位置決め情報演算部32によって演算された位置決め情報すなわち少なくとも回転角度を含む情報は位置決め制御部40に送られる。位置決め制御部40は送受波機構10に搭載された位置決め機構14の動作を制御しており、入力される情報に基づいて走査面セットの回転角度を設定する。つまり、走査面セットを回転させて、図1の(A)に示した状態から(B)に示した状態へ移行させる。この結果、組織の運動方向に一方の走査面(第1走査面S1)が適合し、注目組織の運動(特に直線的な往復運動)はその一方の走査面上において観察される。したがって、表示部30上において2つの断層画像を表示させた場合には、少なくとも一方の断層画像上において常に注目組織の断面が現れることになる。この場合に、上述したように更に他方の走査面についても注目組織の運動に合わせたトラッキング制御を適応すれば、表示部30における他方の断層画像上においても常に注目組織の断面を連続的に表示させることが可能となる。
【0042】
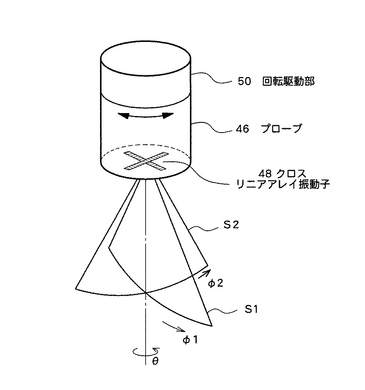
図3には、図2に示した送受波機構10の構成例が示されている。図3に示す例では、プローブ(超音波探触子)46内にクロスリニアアレイ振動子48が設けられている。このクロスリニアアレイ振動子48は、第1方向に直線配列された複数の振動素子からなる第1アレイと、それに直交する第2方向に直線配列された複数の振動素子からなる第2アレイとによって構成されるものである。すなわち、通常の1Dアレイ振動子を直交関係をもって組み合わせ配置したものに相当する。プローブ46には回転駆動部50が連結されており、この回転駆動部50は図示されていないアーム機構などに固定されている。回転駆動部50はプローブ46それ自体を回転駆動する機構であり、プローブ46が回転すると、それに伴って走査面セットも回転する。
【0043】
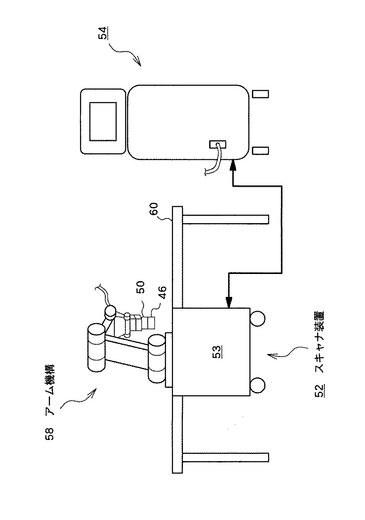
図4には、図3に示した送受波機構を備えるシステムの構成例が示されている。このシステムは、超音波診断装置本体54とスキャナ装置52とを有するものである。ここでは、ベット60上に患者である被検体が載置される。スキャナ装置52はベースユニット53とアーム機構58とを備えている。アーム機構58はその基端部側がベースユニット53に連結されており、その先端部の三次元位置及び姿勢を自在に設定することが可能である。すなわち、アーム機構58は多関節ロボットとして構成されており、各関節部にはエンコーダなどの角度検出器(図示せず)が設けられている。アーム機構58の先端部には図3に示した回転駆動部50及びプローブ46が搭載されている。図示されていない被検体に対してプローブ46を当接した状態において回転駆動部50を動作させれば、プローブ46自体を回転させて走査面セットを回転させることができる。この場合においては、アーム機構58によってプローブ46の当接状態が適正に維持されるように押圧力の制御などを行うのが望ましく、あるいは、プローブ46の回転運動をより円滑にさせるためにプローブ46と生体表面との間に媒体層(水袋など)を設けるようにしてもよい。
【0044】
図5には、図2に示した送受波機構10の他の構成例が示されている。図5に示す例においては、プローブ内に2Dアレイ振動子62及び回転駆動部64が設けられている。2Dアレイ振動子62は二次元配列された複数の振動素子によって構成されるものであり、本実施形態においてはその2Dアレイ振動子62によってバイプレーンである2つの走査面S1,S2が形成される。回転駆動部64はプローブ内において固定されており、その駆動力は回転軸66によって2Dアレイ振動子62に伝達される。その結果、2Dアレイ振動子62の回転角度を自在に設定することが可能となる。
【0045】
図6には、2Dアレイ振動子62を用いてスイッチングによりバイプレーンを形成する技術が示されている。
【0046】
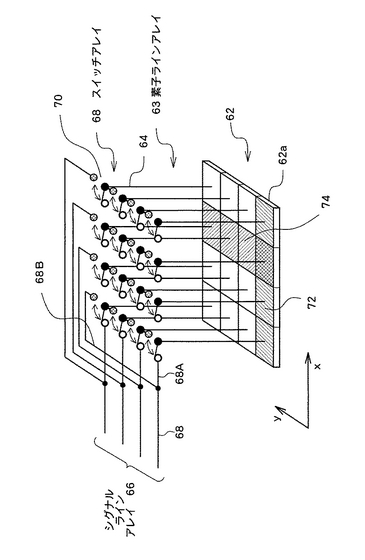
2Dアレイ振動子62はここでは発明説明のために4×4個の振動素子62aによって構成されている。つまり、x方向及びy方向に同数の振動素子62aが整列している。ただし、実際には2Dアレイ振動子62は多くの(例えば数千個の)振動素子62aによって構成される。各振動素子62aごとに素子ライン64が接続されており、それらによって素子ラインアレイ63が構成されている。一方、この例では4つのスイッチアレイ68が設けられており、それらによってシグナルラインアレイ66が構成されている。シグナルラインアレイ66と素子ラインアレイ64との間におけるスイッチング(結線)を行うためスイッチアレイ(スイッチ回路)68が設けられている。具体的には、図示される例において、4×4個のスイッチ70によってスイッチアレイ68が構成されている。
【0047】
各スイッチアレイ68はプローブ内で途中から分岐されて2つの支線68A,68Bが構成されている。4つの支線68Aがy方向の4つの位置に導かれており、4つの支線68Bがx方向の4つの位置に導かれている。上記の各スイッチ70は、自己よりも支線68A側(上流側)のy方向連結用端子(白丸記号)及び支線68B側(上流側)のx方向連結用端子(グレーの丸記号)を選択するものである。その動きが図中において矢印で示されている。このような構成により、各スイッチ70においてx方向連結用の端子(白丸記号)が選択されると、ハッチング72で示されるように、y方向の各位置において、x方向に並んだ4つの振動素子62aが電気的に接続されることになる。その結果、見かけ上、y方向を電子走査方向とする1Dアレイ振動子が構成される。一方、各スイッチ70において、y方向連結用の端子(グレーの丸記号)が選択されると、ハッチング74で示されるように、x方向の各位置において、y方向に並んだ4つの振動素子62aが電気的に接続されることになる。その結果、見かけ上、x方向を電子走査方向とする1Dアレイ振動子が構成される。
【0048】
このように2Dアレイ振動子62が多数の振動素子62aによって構成される場合であっても、スイッチアレイ68によって複数の振動素子についてグルーピングを行うことにより、バイプレーンに対応する2つの直交する1Dアレイ振動子を選択的に構築することができ、その結果、各走査面を形成する際に必要となるシグナルラインの本数を著しく削減することが可能となる。図6に示す例では、16個振動素子62aに対して4つのスイッチアレイ68だけを用いてそれらを駆動することが可能となる。
【0049】
したがって、2Dアレイ振動子を用いてバイプレーンを構成する場合には図6に示すような回路構成を採用するのが望ましく、そのような構成によれば、プローブケーブル内における信号線の本数を著しく削減でき、同時に、送受信で必要となる送信器及び受信器の個数を著しく削減できるという利点がある。
【0050】
ちなみに、電気的に相互接続される振動素子間において、電子的に遅延量の設定を行うこともできる。その場合にはプローブ内にサブディレイ回路を設けるようにすればよい。すなわち、メインディレイ処理を装置本体側において実現し、サブディレイ処理をプローブ内で実現するものである。ちなみに、スイッチアレイ68の構成例としては各種の回路構成を採用することができる。また、プローブ内にサブディレイ回路とメインディレイ回路を設け、サブディレイ処理とメインディレイ処理をプローブ内で行うようにすることもできる。
【0051】
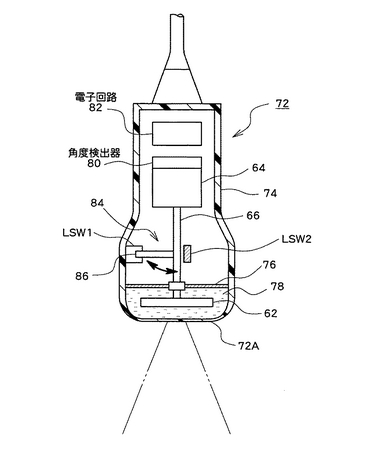
図7には、図5及び図6に示した構成を備えたプローブ72が示されている。このプローブ72は使用者によって把持されるものであってもよいし、図4に示したようなスキャナ装置52によって保持されてもよい。ケース74の下面72Aは送受波面であり、ケース74内には2Dアレイ振動子62が設けられている。ケース74の先端側には媒質層78が形成されており、具体的には隔壁76の下方側が媒質層78となっている。その媒質層78には、純水あるいはひまし油など媒体が充填されている。
【0052】
2Dアレイ振動子62には回転軸66の一端側が連結されており、その他端側は回転駆動部としてのモータ64に連結されている。モータ64には角度検出器80が設けられており、回転角度が検出されている。ケース74内には電子回路82が設けられ、この電子回路82は図6に示したようなスイッチアレイ68を備えている。
【0053】
符号84は回転規制機構を表している。回転軸66には、それに直交する方向に伸びたアーム86が設けられており、そのアーム86は回転軸66と一体的に回転運動する。そのアーム86の可動範囲における一端側にはリミットスイッチLSW1が設けられ、他端側にはリミットスイッチLSW2が設けられている。すなわちアーム86がいずれかのリミットスイッチに到達すると、回転規制が行われることになる。ここで2つのリミットスイッチは90度の角度間隔をもって配置されており、その90度の角度範囲内において2Dアレイ振動子62を回転駆動することができる。もちろん、そのような回転角度範囲については必要に応じた大きさで設定することが可能である。いずれにしても、装置本体側においてモータ64の動作を制御することにより、2Dアレイ振動子62によって形成される走査面セットを組織の運動方向に適切に合致させることが可能となる。
【0054】
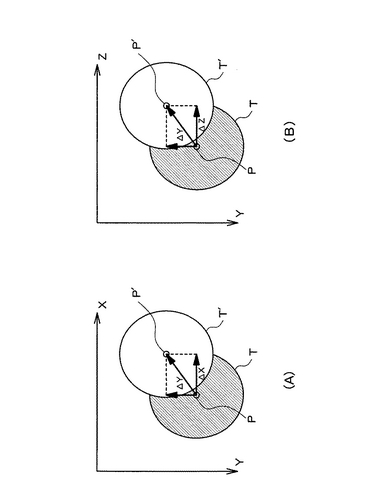
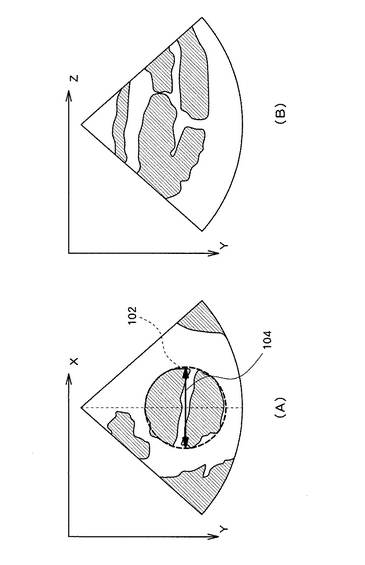
次に、図8〜図10を用いて組織の運動情報の演算について説明する。図8における(A)にはX−Y面上における注目組織の運動が表されている。同様に、(B)にはY−Z面上における注目組織の運動が表されている。ここで、Tは注目組織の運動前の状態を表しており、T’は注目組織の運動後の状態を表している。Pは運動前における注目組織の重心あるいは中心点を表しており、P’は運動後における注目組織の重心あるいは中心点を表している。図8に示されるように、X−Y面上及びY−Z面上において、フレーム間相関演算法を用いて、二次元の運動ベクトルを特定することができ、それらを併せて三次元の運動成分(ΔX,ΔY,ΔZ)を特定することができる。それらは三次元ベクトルに相当するものである。
【0055】
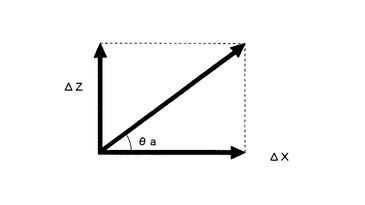
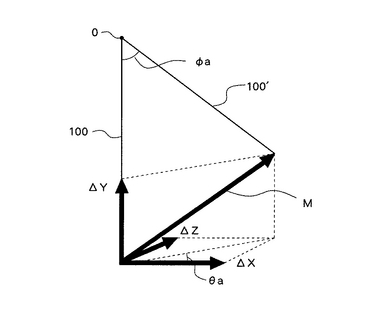
走査面セットを単に回転させるだけの場合には、図9に示されるように、上記で特定された運動成分の内でΔX及びΔZを利用し、組織の運動方向の角度θaを容易に演算することが可能となる。図10には、運動後の組織の重心あるいは中心を表す三次元ベクトルMが表されている。符号100は、送受波原点Oを通過するY軸である。符号100’は、三次元ベクトルMによって特定される点と送受波原点Oとを結ぶラインである。このような幾何学的関係において、三次元ベクトルをX−Z平面に投影した角度として回転角度θaが特定される。また、ライン100’とライン100との交差角度φaが特定される。走査面セットを回転角度θaだけ回転させると、三次元ベクトルMが一方の走査面に合致する。組織が三次元ベクトルMの方向で直線往復運動をしていることを前提とすると、その一方の走査面上において注目組織の一方断面が常に観測される。そして、その一方の走査面に直交する他方の走査面を垂直状態から角度φaだけ傾斜させれば(注目組織の運動に追従させて角度φaを動的に可変すれば)、注目組織の運動にかかわらず、他方の走査面上において注目組織の他方断面を常に観測できる。
【0056】
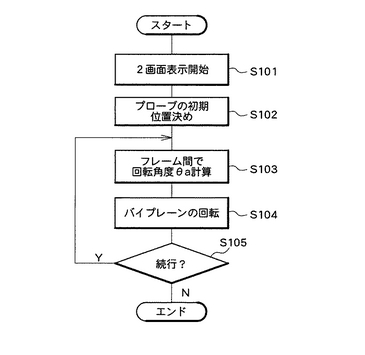
次に、図11を用いて図2に示した装置の動作例について説明する。S101では、2画面表示モードが選択され、各走査面上において超音波ビームの電子走査が開始される。S102では、ユーザーによりあるいはスキャナ装置の制御により、初期位置決めとして、プローブが注目組織に対して適正に位置決めされる。この状態においてはプローブ中心軸ができる限り組織の中心あるいは組織運動の中心を通過するように、プローブの位置及び姿勢を決定するのが望ましい。なお、この段階で、2つの走査面に対応する2つの断層画像の一方又は両方に注目組織をカバーする関心領域をユーザー設定させ、その関心領域内において後述する相関演算を行わせるようにしてもよい。
【0057】
S103では、各走査面上においてフレーム間で走査面データを用いて相関演算が実行され、上述したような演算原理にしたがって回転角度θaが計算される。ちなみに相関演算はスキャンコンバート後における2つの画像フレームデータ間において実行されるが、スキャンコンバート前の送受波フレームデータ間において実行することも可能である。S104では、走査面セットすなわちバイプレーンが回転駆動され、上記で特定された回転角度θaに相当する位置に走査面セットが位置決めされる。S105ではその後においても継続的に走査面セットの位置決めを行うか否かが判断される。継続的にその位置決めを行えば、注目組織が非直線的な運動をする場合であっても、一方の断層画像上に常に注目組織をリアルタイム表示することが可能となる。
【0058】
したがって、以上のような動作を行えば、注目組織の運動に合わせて走査面セットの回転角度を適正に設定して、その結果として、少なくとも一方の断層画像上において常に注目組織の断面を観察することが可能となり、また組織の運動をより正確にトラッキングすることが可能となる。
【0059】
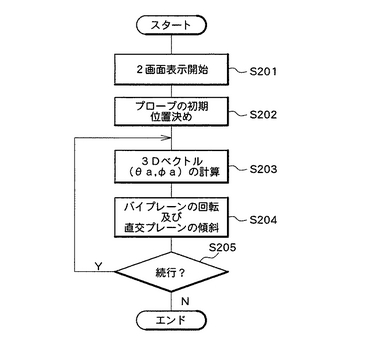
図12には、走査面セットの回転を行うと共に、他方の走査面を注目組織の運動に追従させて動的に傾斜運動させる実施形態がフローチャートとして示されている。
【0060】
S201及びS202では、図11に示したS101及びS102と同様の工程が実行される。S203では、上述した原理に基づいて三次元移動ベクトルが計算される。そして、S204では走査面セットが回転され、さらに他方の走査面である運動方向に直交する走査面が注目組織に合わせて傾斜制御される。そしてS205においてはリアルタイムで上記の制御を実行するか否かが判断される。
【0061】
このような実施形態によれば、2つの断層画像を表示させた場合において、一方の断層画像上において注目組織を常時表示させることができ、特に、断層画像上において注目組織の運動を表現でき、他方の断層画像においても注目組織の断面を常時表示させることが可能となる。なお、それぞれの断層画像上に他の断層画像の位置を表すライン状のマーカーを表示するのが望ましい。
【0062】
次に、図13〜図17を用いて更に他の実施形態について説明する。
【0063】
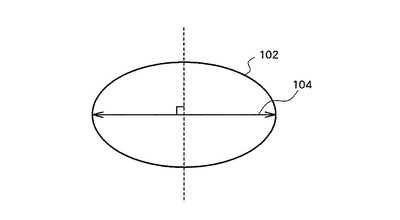
図13には、直交する第1走査面及び第2走査面に対応する2つの断層画像が示されている。ここで、(A)に示す断層画像上においては例えば心臓の短軸断層像が示されており、(B)には心臓の長軸断層像が示されている。この例では、(A)に示す短軸断層像上において心臓の内腔が楕円近似される。その楕円が符号102によって表されている。このような図形近似は公知の手法を用いて行うことができ、例えばエッジ検出による輪郭抽出及び楕円パターンフィッティングなどの手法を適用することができる。その楕円102について水平軸104の長さが演算される。この水平軸は送受波の中心軸に直交する軸である。走査面セットを一定角度ピッチΔθで順次回転させつつ、各回転位置において楕円102を特定すると共に、その水平軸104の長さを演算すれば、水平軸104の長さが最も小さくなった角度位置を適正角度として特定することが可能となる。つまり、図14に示されるように、短軸像を取得するための走査面が心腔に対して斜めに傾くと、楕円102における水平軸104の長さが増大することになるため、そのような水平軸104の長さの変動をもって適正な回転角度を特定するものである。短軸断層像が適正に設定されれば、それと直交する長軸断層像も適正に形成されることになる。
【0064】
この実施形態においては、図2に示した位置決め情報演算部32に代えて、各フレームについて楕円近似及び水平軸長演算を実行し、また最小の水平軸長を特定することによってその時の回転角度を特定する演算処理部が設けられる。また、位置決め制御部40が回転試行制御及び最終的な回転角度位置決め制御を実行する。それ以外の構成は基本的に図2に示した構成を採用しうる。
【0065】
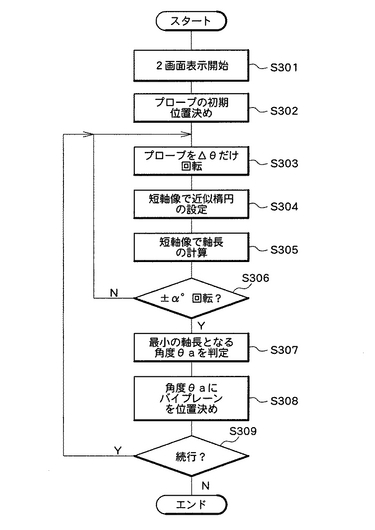
以上の手法をフローチャートとして表したのが図15である。S301及びS302では、上記のS101及びS102と同様の工程が実行される。S303では、プローブあるいは走査面セットが一定の角度ピッチΔθだけ回転される。S304では、その回転角度位置において形成された断層画像上においてここでは短軸断層像とみなされる画像において近似楕円が設定される。
【0066】
そして、S305では、その画像上において水平軸の長さが計算される。S306では、一定の角度範囲±α°(例えば±45°)にわたって走査面セットの回転走査がなされたか否かが判断され、なされていなければS303からの工程が繰り返し実行される。そして、S307では、最小の水平軸長となる角度θaが判定され、S308では当該角度θaに走査面セットの角度位置が設定されることになる。S309ではこの工程を更に繰り返し実行させるか否かが判断される。
【0067】
上記の手法は、例えば図16に示すような血管の2画面同時表示の場合においても適用することができる。すなわち図16の(A)には血管106についての横断面像が示されており、(B)には血管106についての縦断面像が示されている。このような表示に際して一定の角度ピッチをもって走査面セットを徐々に回転させつつ、各回転角度位置において例えば横断面に相当する画像上において血管内腔の面積(例えばピクセル数)を計算すれば、最も面積の小さい角度位置として適正角度を判定することが可能となる。
【0068】
図17には、以上説明した手法がフローチャートとして示されている。S401及びS402では、上記のS101及びS102と同様の工程が実行される。S403ではプローブあるいは走査面セットが一定の角度ピッチΔθだけ回転される。そして、S404では、その状態において横断面に相当する画像について血管面積が計算される。そして、S405において一定の角度範囲±β°(例えば±45°)にわたって上記の工程が実行されたか否かが判断され、完了していなければS403からの各工程が繰り返し実行される。
【0069】
S406では、以上のように各角度位置において計算された血管面積の中で最小面積となる角度θaが判定され、S407においては当該角度θaに走査面セットが位置決めされることになる。S408ではこの処理を続行させるか否かが判断されている。
【0070】
この実施形態においては、図2に示した位置決め情報演算部32に代えて、各フレームについて血管面積の演算を実行し、また最小の血管面積を特定することによってその時の回転角度を特定する演算処理部が設けられる。また、位置決め制御部40が回転試行制御及び最終的な回転角度位置決め制御を実行する。それ以外の構成は基本的に図2に示した構成を採用しうる。
【0071】
よって、図13〜図17に示した実施形態によれば、走査面セット(あるいは一方の走査面)を回転走査させ、各角度位置において軸長あるいは面積などの物理量の定量を行うことにより、その物理量のプロファイルあるいは物理量の相対比較から最も最適な回転角度を見出すことができ、当該回転角度に走査面セットを位置決めすれば、対象臓器について正確な断面及びそれに直交する断面を画像として形成することが可能となる。
【図面の簡単な説明】
【0072】
【図1】走査面セットの回転により一方の走査面を注目組織の運動方向に合わせる方法を説明するための図である。
【図2】本実施形態に係る超音波診断装置の全体構成を示すブロック図である。
【図3】プローブを回転駆動させる機構を表す図である。
【図4】スキャナ装置の構成を説明するための図である。
【図5】2Dアレイ振動子を回転駆動させる構成を示す図である。
【図6】スイッチアレイの構造及びその差異を説明するための図である。
【図7】本実施形態に係るプローブの構成を示す断面図である。
【図8】第1走査面及び第2走査面上における注目組織の運動を説明するための図である。
【図9】注目組織の運動方向を表す角度の演算を説明するための図である。
【図10】三次元移動ベクトルの演算を説明するための図である。
【図11】本実施形態に係る装置の動作を説明するためのフローチャートである。
【図12】本実施形態に係る装置の他の動作例を説明するためのフローチャートである。
【図13】心臓についての短軸断層像及び長軸断層像を示す図である。
【図14】近似楕円と水平軸の長さを示す図である。
【図15】走査面セットを回転走査させて最適な回転角度を求める実施形態を説明するためのフローチャートである。
【図16】血管の横断面及び縦断面を示す図である。
【図17】走査面セットを回転走査させて適正な回転角度を求める他の実施形態を説明するためのフローチャートである。
【符号の説明】
【0073】
10 送受波機構、12 アレイ振動子、14 位置決め機構、16 送信部、20 受信部、24 画像形成部、28 表示処理部、32 位置決め情報演算部、40 位置決め制御部、42 主制御部、46 プローブ、48 クロスリニアアレイ振動子、50 回転駆動部、52 スキャナ装置、58 アーム機構、62 2Dアレイ振動子、64 回転駆動部。
【技術分野】
【0001】
本発明は超音波診断装置に関し、特に、互いに交差する複数の走査面を形成する超音波診断装置に関する。
【背景技術】
【0002】
バイプレーンプローブは、第1走査面とそれに直交する第2走査面とを形成する超音波探触子である。例えば、従来のバイプレーンプローブ(例えば体腔内挿入型プローブ)は、プローブ軸方向に平行に形成された第1アレイ振動子と、プローブ軸と直交する方向に形成された第2アレイ振動子とを有する。第1アレイ振動子によって第1走査面が形成され、それにより得られた第1走査面データに基づいて第1断層画像が形成され、これと同様に、第2アレイ振動子によって第2走査面が形成され、それにより得られた第2走査面データに基づいて第2断層画像が形成される。それらの断層画像は同時表示され、注目組織が直交する二断面をもって観察される。1つの断層画像では、注目組織についてある平面内についての構造やサイズを観察できるが、その平面の前後方向について注目組織の構造やサイズを認識することはできない。上記のようなバイプレーン技術を利用することによって、もう1つの断層画像上において、注目組織の奥行き方向についても構造やサイズを観察できる。なお、各走査面は超音波ビームを電子走査することによって形成されるものであるが、超音波ビームが機械走査される場合もある。
【0003】
超音波ビームを二次元走査してボリュームデータを取込み、これにより注目組織の三次元画像を形成することによって、注目組織について立体的な観察を行える。しかし、そのために2Dアレイ振動子を利用して極めて多くの送受信チャンネル(送信器、受信器)を用いて超音波の送受信を行うと、そのための電子回路の規模が膨大となる。よって、実用化までになお幾つかの問題が残されている。これに対し、上記のバイプレーン技術によれば、三次元画像を形成することはできないものの、注目組織を擬似的に三次元観察できるという利点がある。
【0004】
以下の特許文献1には、互いに平行な複数の走査面を形成して三次元画像を構築する場合に、手振れなどに起因して各走査面間の生じる画像の位置ずれを解消するために、画像間で相関演算を行って画像相互を位置決めする技術が開示されている。しかし、バイプレーンあるいは運動組織への追従制御については記載されていない。なお、本願に関連する未公開の先願として、特願2003−427400号がある。
【0005】
【特許文献1】特開平8−332187号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、バイプレーン技術によって運動する注目組織(例えば心臓)の超音波診断を行う場合、注目組織の運動によって注目組織が2つの走査面から外れてしまうという問題がある。つまり、2つの走査面に対応する2つの断層画像のいずれにおいても、注目組織が表示されなくなり、あるいは、その表示が維持されていても目的部位以外しか観察できなくなる。その結果、バイプレーンを計測のために利用する場合、注目組織についての計測精度が低下する。一方、バイプレーンを注目組織の横断面位置及び縦断面位置に適正に位置決めすることが要望されている。
【0007】
本発明の目的は、注目組織の運動方向に応じて互いに交差する複数の走査面を位置決めできるようにすることにある。
【0008】
本発明の他の目的は、互いに交差する複数の走査面を注目組織の第1断面位置及び第2断面位置に適正に位置決めできるようにすることにある。
【課題を解決するための手段】
【0009】
(1)本発明は、互いに交差する第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データに基づいて、注目組織の移動情報を演算する移動情報演算手段と、前記走査面セットを回転させる回転機構を有し、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる位置決め手段と、を含むことを特徴とする。
【0010】
上記構成によれば、互いに交差関係(望ましくは直交関係)にある第1走査面データ及び第2走査面データに基づいて注目組織の移動情報が演算される。ここで、注目組織は、画像化される組織全体であってもよいし、特定の組織部分であってもよい。移動情報は、少なくとも走査面セットの適正な回転角度を決定するために用いられる情報を含み、移動方向(移動角度)の情報であってもよいし、三次元ベクトル(三次元の移動方向と移動量を特定する情報)であってもよい。望ましくは、各走査面ごとに時間的に隣接するフレーム間において走査面データの相関演算などが実行され、これにより各走査面上における注目組織の移動成分(運動成分)が特定され、それらの移動成分から移動情報が演算される。もちろん、フレーム間相関演算の手法以外の手法を用いて移動情報を演算することも可能である。移動情報に基づいて走査面セット(望ましくは直交関係にあるバイプレーン)が回転駆動され、一方の走査面が注目組織の移動方向に適合される。仮に、注目組織が直線的な往復運動をするものであれば、走査面セットの位置は固定的となり、一方の走査面上において常に注目組織が観察されることになる。他方の走査面上においては、注目組織の運動位置に応じて、組織断面が現れる。これに関し、他方の走査面を注目組織の運動に合わせて揺動運動(傾斜運動)、平行運動などさせれば、他方の走査面上においても常に注目組織を観察することが可能となる。注目組織が非直線運動する場合には、リアルタイムで走査面セットの位置を更新するようにすれば、つまりリアルタイムで走査面セットの位置決めを行えば、少なくとも一方の走査面上において注目組織をトラッキングできる。位置決め手段は、電子的に走査面セットを回転させるものであってもよいが、より簡便には、機械的に走査面セットを回転させる機構を採用するのが望ましい。
【0011】
上記構成を有する超音波診断装置を放射線治療装置と組み合わせて治療システムを構築することも可能であり、その場合には、超音波診断によって注目組織(治療ターゲット組織)を超音波画像として常に表示でき、あるいは、その注目組織の位置をリアルタイムに精度よく特定できる。
【0012】
望ましくは、前記回転機構は、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させる。各走査面は矩形、扇状などの形態を有する。プローブの初期位置決め時に、送受波の中心線上に注目組織ができるだけ位置決めされるようにするのが望ましい。
【0013】
望ましくは、前記アレイ振動子は超音波探触子内に設けられ、前記回転機構は、前記超音波探触子内に設けられ、前記アレイ振動子を回転させる機構である。この構成によれば、超音波探触子それ自体の姿勢を維持しつつ走査面セットを回転させることができる。超音波探触子は使用者によって把持され、あるいはロボットに保持される。
【0014】
望ましくは、前記アレイ振動子は超音波探触子内に設けられ、前記回転機構は、前記超音波探触子を回転させる機構である。望ましくは、前記超音波探触子を保持し、前記超音波探触子の位置を調整するアーム機構が設けられる。回転機構はアーム機構の先端部に設けるのが望ましい。
【0015】
望ましくは、前記位置決め手段は、更に、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で他方の走査面の位置を変更する手段を含む。この構成によれば、注目組織の運動に合わせて他方の走査面の位置を追従制御することが可能となり、2つの断層画像上において注目組織を常に画像化することが可能となる。
【0016】
望ましくは、前記アレイ振動子は、二次元配列された複数の振動素子で構成され、前記アレイ振動子をX方向に並んだ複数のY方向素子列として機能させるX方向走査用接続パターンと、前記アレイ振動子をY方向に並んだ複数のX方向素子列として機能させるY方向用接続パターンと、を切り換えるスイッチ回路が設けられ、前記X方向走査用接続パターンの選択時に前記第1走査面が形成され、前記Y方向走査用接続パターンの選択時に前記第2走査面が形成される。
【0017】
上記構成によれば、いわゆる2Dアレイ振動子を簡易的なバイプレーン用アレイ振動子として利用することが可能となる。つまり、2Dアレイ振動子をX方向に電子走査するための1Dアレイ振動子として機能させる場合と、2Dアレイ振動子をY方向に電子走査するための1Dアレイ振動子として機能させる場合とを選択できる。各振動素子列を構成する複数の振動素子を電気的に接続すれば送受信チャンネルのリダクションを図れる。
【0018】
望ましくは、前記スイッチ回路は前記アレイ振動子と共に超音波探触子内に設けられる。超音波探触子内で複数の受信信号のグルーピング及び送信信号の分配が行えるので、プローブケーブル内を挿通する信号線の本数を著しく削減できる。
【0019】
望ましくは、前記アレイ振動子はクロスリニアアレイ振動子である。第1走査面と第2走査面とは基本的に両者が中心線上でクロスする直交関係を有する。クロスリニアアレイ振動子を用いれば、注目組織を縦断面及びそれにクロスする横断面として観察することができる。
【0020】
(2)本発明は、直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データの内で少なくとも一方の走査面データに基づいて注目組織の移動情報を演算する移動情報演算手段と、前記移動情報に基づいて、前記走査面セットの回転角度を演算する手段と、前記回転角度を演算する手段の演算結果に基づいて、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させ、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる回転機構と、前記第1走査面データに基づいて第1断層画像を形成し、前記第2走査面データに基づいて第2断層画像を形成する画像形成部と、を含むことを特徴とする。
【0021】
望ましくは、前記回転角度を演算する手段は、前記第1走査面データに基づいて前記第1走査面上における注目組織の移動成分を演算する手段と、前記第2走査面データに基づいて前記第2走査面上における注目組織の移動成分を演算する手段と、前記第1走査面上における注目組織の移動成分と前記第2走査面上における注目組織の移動成分とに基づいて前記走査面セットの回転角度を求める手段と、を含む。
【0022】
(3)本発明は、直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、前記第1走査面を試行的に回転走査させた場合において、各回転角度ごとに第1走査面データに基づいて注目組織について計測を行う手段と、前記各回転角度ごとの注目組織についての計測結果に基づいて前記走査面セットの適正回転角度を判定する手段と、前記走査面セットをその適正回転角度に位置決めし、これにより、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の横断面位置に位置決めし、且つ、前記第1走査面及び前記第2走査面の内で他方の走査面を前記注目組織の縦断面位置に位置決めする手段と、を含む。
【0023】
上記構成によれば、走査面セットを構成する2つの走査面を注目組織の縦断面位置と横断面位置に自動的に且つ適正に位置決めできる。このため、注目組織のバイプレーン観察に当たってその便宜を図ることができ、また臓器の面積や体積などの計測を行う場合にその計測精度を向上できる。少なくとも第1走査面データに基づいて適正回転角度が求められるが、更に第2走査面データを用いるようにしてもよい。
【0024】
望ましくは、前記計測結果は前記注目組織の軸長である。軸長は例えば注目組織の輪郭の直径あるいは所定方向のサイズとして定義される。望ましくは、前記計測結果は前記注目組織の面積である。注目組織を構成するピクセル数のカウントによって面積を求めることもできる。
【発明の効果】
【0025】
以上説明したように、本発明によれば、注目組織の運動方向に応じて互いに交差する複数の走査面を位置決めできる。本発明によれば、互いに交差する複数の走査面を注目組織に対して適正に位置決めできる。
【発明を実施するための最良の形態】
【0026】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0027】
図1には、本実施形態の原理が概念図として示されている。図1における(A)及び(B)は中心線上で直交する2つの走査面を表しており、それらの2つの走査面によって走査面セット(バイプレーン)が構成されている。(A)にはその走査面セットを回転させる前の初期状態が示されており、(B)にはその走査面セットを注目組織の運動方向に合わせて回転させた後の適合状態が示されている。
【0028】
(A)において、走査面S1と走査面S2は同時に又は時分割で交互に形成されるものであって、それらは中心軸上において互いに90度の角度をもって交差している。なお、(A)及び(B)に示される図は、例えば送受波原点から深さ方向に観察した2つの走査面S1,S2を表している(走査面セットは十字形に現れている)。注目組織Tは運動臓器であって、その注目組織の運動方向がベクトルMとして表されている。ここでは説明のために注目組織Tが直線的に往復運動をする場合を想定している。
【0029】
注目組織Tがある一定時間後に符号T’として示される位置に移動した場合、(A)に示す状態では、走査面S1及び走査面S2のいずれにおいても注目組織は観察できなくなってしまう。そこで、本実施形態においては、注目組織の運動方向(運動角度)を判定し、その運動方向に一方の走査面(ここでは走査面S1)を合わせることにより、上記の問題に対処している。すなわち、注目組織の運動方向Mが特定されると、走査面セットそれ全体がその運動方向に相当する角度分だけ回転駆動される。その状態が(B)に示されている。ここでは、2つの走査面S1,S2はそれぞれ回転後の状態においてS1’S2’として表されている。回転角度はθaで表されている。
【0030】
このように、走査面セットの全体を必要な角度だけ回転させれば、一方の走査面S1’上において常に注目組織をその運動位置に関わらず断面(運動方向を含む断面)として観察することができるようになり、その結果、いずれの断層画像上においても注目組織を観察できなくなってしまう問題を解消できる。また、例えば超音波診断装置と放射線治療装置とを組み合わせて治療システムを構成した場合において、注目組織の運動をより正確に把握することができるので、治療用の放射線の照射先を精度良く特定できるという利点がある。ちなみに、(B)に示す状態において、他方の走査面S2’上においては時相に応じて注目組織の断面(その運動方向と直交する断面)が間欠的に現れることになる。なお、その走査面S2’上においても常に注目組織をトラッキングさせたい場合には注目組織の運動に合わせて走査面S2’を揺動運動あるいは平行運動させるようにすればよい。この場合においては、注目組織の運動情報として、運動方位(角度)の他に当該方向における運動量の情報を特定すればよい。
【0031】
ちなみに、2つの走査面はそれぞれ超音波ビームの電子走査によって形成され、その電子走査方式としては電子セクタ走査、電子リニア走査などをあげることができる。この場合において、それらの走査面を形成するために、後述するようなクロスリニアアレイ振動子を用いることができ、あるいは2Dアレイ振動子を用いることができる。走査面セットの回転を行うための機構あるいは手段に関しては後に説明する。
【0032】
図2には、本実施形態に係る超音波診断装置の全体構成がブロック図として示されている。送受波機構10は、図2に示される構成例において、アレイ振動子12と位置決め機構14とを有している。アレイ振動子12はクロスリニアアレイ振動子あるいは2Dアレイ振動子などであって、そのアレイ振動子12によって図2に示されるように第1走査面S1及び第2走査面S2が形成される。ここでそれらの2つの走査面S1,S2によって走査面セットが構成され、その走査面セットは中心軸上で回転駆動され、その回転方向がθで表されている。
【0033】
第1走査面S1はφ1方向に超音波ビームを走査することによって形成され、これと同様に、第2走査面S2はφ2方向に超音波ビームを電子走査することによって形成される。X−Y−Zは送受波空間としての三次元空間を表している。なお、電子的な偏向制御を適用して、必要に応じて、第1走査面S1をφ2方向に傾斜させ、あるいは、第2走査面S2をφ1方向に傾斜させるようにしてもよい。図1では、両走査面が傾斜角度ゼロで直交している(つまり各走査面の中心線が合致している)状態が示されている。
【0034】
位置決め機構14は、上述したように、注目組織の運動方向に合わせて走査面セットを位置決めするための機構であり、その位置決め機構14としては多様な構成例をあげることができる。例えば、アレイ振動子12を超音波探触子内で回転させる機構、アレイ振動子12を備えた超音波探触子それ自体を回転させる機構などをあげることができる。これについては後に図3及び図5などを用いて詳述する。
【0035】
送信部16は、送信ビームフォーマーとして機能するものであり、図2に示す例では、2つの走査面S1,S2に対応して2つの送信器18A,18Bが示されている。ただし、単一の送信器を時分割動作させることによって2つの走査面S1,S2を形成することも可能である。
【0036】
受信部20は受信ビームフォーマーとして機能する。図2に示す例では2つの走査面S1,S2に対応して2つの受信器22A,22Bが示されているが、もちろん単一の受信器を時分割動作させるようにしてもよい。いずれにしても、送信部16及び受信部20の作用によって2つの走査面S1,S2が同時あるいは交互に形成されることになる。ここで、各走査面は超音波ビームの電子走査によって形成される。
【0037】
画像形成部24は、デジタルスキャンコンバータ(DSC)などを有し、走査面を構成する複数のビームデータに基づいて断層画像を形成する機能を有する。図2に示す例では、2つの走査面S1,S2に対応して2つの画像形成器26A,26Bが表されているが、もちろん単一の画像形成器を時分割動作させることによって、2つの走査面S1,S2に対応する2つの断層画像(Bモード画像)を時分割で形成するようにしてもよい。なお、二次元カラードプラ画像が白黒断層画像上に合成されたカラーフローマッピング画像を形成することもできる。
【0038】
2つの断層画像のデータは表示処理部28に送られ、その表示処理部28によって合成処理などが実行された後、それらの画像データは表示部30に送られる。表示部30においては、いわゆる2画面同時表示モードにおいて、2つの断層画像が並列的に表示されることになる。主制御部42は、本装置内の各構成の動作制御を行っている。その主制御部42には操作パネルなどによって構成される入力部44が接続されている。
【0039】
位置決め情報演算部32は、上述した走査面セットを回転するための参照情報を演算する手段である。本実施形態において、位置決め情報演算部32は、第1ベクトル演算部34、第2ベクトル演算部36及び合成演算部38を有している。この位置決め情報演算部32は、ハードウエアとして構成することもできるし、ソフトウエアの機能として実現することもできる。
【0040】
第1ベクトル演算部34は、第1走査面S1について、フレーム間において走査面データの相関演算を実行し、これによって第1走査面S1上における組織の移動ベクトル(移動成分)を演算する。これと同様に、第2ベクトル演算部36は、第2走査面S2について、フレーム間において走査面データの相関演算を実行し、これにより第2走査面S2上における組織の移動ベクトル(移動成分)を演算する。なお、走査面データは、送受波フレーム(走査面)を構成する複数のビームデータによって構成されてもよいが、座標変換後の断層画像データであるのが望ましい。
【0041】
2つの走査面S1,S2については、本実施形態において常に直交関係が維持されている。各走査面S1,S2上において二次元の移動ベクトルが特定されると、それらの移動ベクトルに基づいて組織の三次元移動ベクトルを演算することが可能となる。それを行うのが合成演算部38である。ただし、単に走査面セットを回転させるだけのモードが採用される場合には、三次元移動ベクトルを実際に演算する必要はなく、組織の移動方向すなわち回転角度の情報を演算するだけでよい。位置決め情報演算部32によって演算された位置決め情報すなわち少なくとも回転角度を含む情報は位置決め制御部40に送られる。位置決め制御部40は送受波機構10に搭載された位置決め機構14の動作を制御しており、入力される情報に基づいて走査面セットの回転角度を設定する。つまり、走査面セットを回転させて、図1の(A)に示した状態から(B)に示した状態へ移行させる。この結果、組織の運動方向に一方の走査面(第1走査面S1)が適合し、注目組織の運動(特に直線的な往復運動)はその一方の走査面上において観察される。したがって、表示部30上において2つの断層画像を表示させた場合には、少なくとも一方の断層画像上において常に注目組織の断面が現れることになる。この場合に、上述したように更に他方の走査面についても注目組織の運動に合わせたトラッキング制御を適応すれば、表示部30における他方の断層画像上においても常に注目組織の断面を連続的に表示させることが可能となる。
【0042】
図3には、図2に示した送受波機構10の構成例が示されている。図3に示す例では、プローブ(超音波探触子)46内にクロスリニアアレイ振動子48が設けられている。このクロスリニアアレイ振動子48は、第1方向に直線配列された複数の振動素子からなる第1アレイと、それに直交する第2方向に直線配列された複数の振動素子からなる第2アレイとによって構成されるものである。すなわち、通常の1Dアレイ振動子を直交関係をもって組み合わせ配置したものに相当する。プローブ46には回転駆動部50が連結されており、この回転駆動部50は図示されていないアーム機構などに固定されている。回転駆動部50はプローブ46それ自体を回転駆動する機構であり、プローブ46が回転すると、それに伴って走査面セットも回転する。
【0043】
図4には、図3に示した送受波機構を備えるシステムの構成例が示されている。このシステムは、超音波診断装置本体54とスキャナ装置52とを有するものである。ここでは、ベット60上に患者である被検体が載置される。スキャナ装置52はベースユニット53とアーム機構58とを備えている。アーム機構58はその基端部側がベースユニット53に連結されており、その先端部の三次元位置及び姿勢を自在に設定することが可能である。すなわち、アーム機構58は多関節ロボットとして構成されており、各関節部にはエンコーダなどの角度検出器(図示せず)が設けられている。アーム機構58の先端部には図3に示した回転駆動部50及びプローブ46が搭載されている。図示されていない被検体に対してプローブ46を当接した状態において回転駆動部50を動作させれば、プローブ46自体を回転させて走査面セットを回転させることができる。この場合においては、アーム機構58によってプローブ46の当接状態が適正に維持されるように押圧力の制御などを行うのが望ましく、あるいは、プローブ46の回転運動をより円滑にさせるためにプローブ46と生体表面との間に媒体層(水袋など)を設けるようにしてもよい。
【0044】
図5には、図2に示した送受波機構10の他の構成例が示されている。図5に示す例においては、プローブ内に2Dアレイ振動子62及び回転駆動部64が設けられている。2Dアレイ振動子62は二次元配列された複数の振動素子によって構成されるものであり、本実施形態においてはその2Dアレイ振動子62によってバイプレーンである2つの走査面S1,S2が形成される。回転駆動部64はプローブ内において固定されており、その駆動力は回転軸66によって2Dアレイ振動子62に伝達される。その結果、2Dアレイ振動子62の回転角度を自在に設定することが可能となる。
【0045】
図6には、2Dアレイ振動子62を用いてスイッチングによりバイプレーンを形成する技術が示されている。
【0046】
2Dアレイ振動子62はここでは発明説明のために4×4個の振動素子62aによって構成されている。つまり、x方向及びy方向に同数の振動素子62aが整列している。ただし、実際には2Dアレイ振動子62は多くの(例えば数千個の)振動素子62aによって構成される。各振動素子62aごとに素子ライン64が接続されており、それらによって素子ラインアレイ63が構成されている。一方、この例では4つのスイッチアレイ68が設けられており、それらによってシグナルラインアレイ66が構成されている。シグナルラインアレイ66と素子ラインアレイ64との間におけるスイッチング(結線)を行うためスイッチアレイ(スイッチ回路)68が設けられている。具体的には、図示される例において、4×4個のスイッチ70によってスイッチアレイ68が構成されている。
【0047】
各スイッチアレイ68はプローブ内で途中から分岐されて2つの支線68A,68Bが構成されている。4つの支線68Aがy方向の4つの位置に導かれており、4つの支線68Bがx方向の4つの位置に導かれている。上記の各スイッチ70は、自己よりも支線68A側(上流側)のy方向連結用端子(白丸記号)及び支線68B側(上流側)のx方向連結用端子(グレーの丸記号)を選択するものである。その動きが図中において矢印で示されている。このような構成により、各スイッチ70においてx方向連結用の端子(白丸記号)が選択されると、ハッチング72で示されるように、y方向の各位置において、x方向に並んだ4つの振動素子62aが電気的に接続されることになる。その結果、見かけ上、y方向を電子走査方向とする1Dアレイ振動子が構成される。一方、各スイッチ70において、y方向連結用の端子(グレーの丸記号)が選択されると、ハッチング74で示されるように、x方向の各位置において、y方向に並んだ4つの振動素子62aが電気的に接続されることになる。その結果、見かけ上、x方向を電子走査方向とする1Dアレイ振動子が構成される。
【0048】
このように2Dアレイ振動子62が多数の振動素子62aによって構成される場合であっても、スイッチアレイ68によって複数の振動素子についてグルーピングを行うことにより、バイプレーンに対応する2つの直交する1Dアレイ振動子を選択的に構築することができ、その結果、各走査面を形成する際に必要となるシグナルラインの本数を著しく削減することが可能となる。図6に示す例では、16個振動素子62aに対して4つのスイッチアレイ68だけを用いてそれらを駆動することが可能となる。
【0049】
したがって、2Dアレイ振動子を用いてバイプレーンを構成する場合には図6に示すような回路構成を採用するのが望ましく、そのような構成によれば、プローブケーブル内における信号線の本数を著しく削減でき、同時に、送受信で必要となる送信器及び受信器の個数を著しく削減できるという利点がある。
【0050】
ちなみに、電気的に相互接続される振動素子間において、電子的に遅延量の設定を行うこともできる。その場合にはプローブ内にサブディレイ回路を設けるようにすればよい。すなわち、メインディレイ処理を装置本体側において実現し、サブディレイ処理をプローブ内で実現するものである。ちなみに、スイッチアレイ68の構成例としては各種の回路構成を採用することができる。また、プローブ内にサブディレイ回路とメインディレイ回路を設け、サブディレイ処理とメインディレイ処理をプローブ内で行うようにすることもできる。
【0051】
図7には、図5及び図6に示した構成を備えたプローブ72が示されている。このプローブ72は使用者によって把持されるものであってもよいし、図4に示したようなスキャナ装置52によって保持されてもよい。ケース74の下面72Aは送受波面であり、ケース74内には2Dアレイ振動子62が設けられている。ケース74の先端側には媒質層78が形成されており、具体的には隔壁76の下方側が媒質層78となっている。その媒質層78には、純水あるいはひまし油など媒体が充填されている。
【0052】
2Dアレイ振動子62には回転軸66の一端側が連結されており、その他端側は回転駆動部としてのモータ64に連結されている。モータ64には角度検出器80が設けられており、回転角度が検出されている。ケース74内には電子回路82が設けられ、この電子回路82は図6に示したようなスイッチアレイ68を備えている。
【0053】
符号84は回転規制機構を表している。回転軸66には、それに直交する方向に伸びたアーム86が設けられており、そのアーム86は回転軸66と一体的に回転運動する。そのアーム86の可動範囲における一端側にはリミットスイッチLSW1が設けられ、他端側にはリミットスイッチLSW2が設けられている。すなわちアーム86がいずれかのリミットスイッチに到達すると、回転規制が行われることになる。ここで2つのリミットスイッチは90度の角度間隔をもって配置されており、その90度の角度範囲内において2Dアレイ振動子62を回転駆動することができる。もちろん、そのような回転角度範囲については必要に応じた大きさで設定することが可能である。いずれにしても、装置本体側においてモータ64の動作を制御することにより、2Dアレイ振動子62によって形成される走査面セットを組織の運動方向に適切に合致させることが可能となる。
【0054】
次に、図8〜図10を用いて組織の運動情報の演算について説明する。図8における(A)にはX−Y面上における注目組織の運動が表されている。同様に、(B)にはY−Z面上における注目組織の運動が表されている。ここで、Tは注目組織の運動前の状態を表しており、T’は注目組織の運動後の状態を表している。Pは運動前における注目組織の重心あるいは中心点を表しており、P’は運動後における注目組織の重心あるいは中心点を表している。図8に示されるように、X−Y面上及びY−Z面上において、フレーム間相関演算法を用いて、二次元の運動ベクトルを特定することができ、それらを併せて三次元の運動成分(ΔX,ΔY,ΔZ)を特定することができる。それらは三次元ベクトルに相当するものである。
【0055】
走査面セットを単に回転させるだけの場合には、図9に示されるように、上記で特定された運動成分の内でΔX及びΔZを利用し、組織の運動方向の角度θaを容易に演算することが可能となる。図10には、運動後の組織の重心あるいは中心を表す三次元ベクトルMが表されている。符号100は、送受波原点Oを通過するY軸である。符号100’は、三次元ベクトルMによって特定される点と送受波原点Oとを結ぶラインである。このような幾何学的関係において、三次元ベクトルをX−Z平面に投影した角度として回転角度θaが特定される。また、ライン100’とライン100との交差角度φaが特定される。走査面セットを回転角度θaだけ回転させると、三次元ベクトルMが一方の走査面に合致する。組織が三次元ベクトルMの方向で直線往復運動をしていることを前提とすると、その一方の走査面上において注目組織の一方断面が常に観測される。そして、その一方の走査面に直交する他方の走査面を垂直状態から角度φaだけ傾斜させれば(注目組織の運動に追従させて角度φaを動的に可変すれば)、注目組織の運動にかかわらず、他方の走査面上において注目組織の他方断面を常に観測できる。
【0056】
次に、図11を用いて図2に示した装置の動作例について説明する。S101では、2画面表示モードが選択され、各走査面上において超音波ビームの電子走査が開始される。S102では、ユーザーによりあるいはスキャナ装置の制御により、初期位置決めとして、プローブが注目組織に対して適正に位置決めされる。この状態においてはプローブ中心軸ができる限り組織の中心あるいは組織運動の中心を通過するように、プローブの位置及び姿勢を決定するのが望ましい。なお、この段階で、2つの走査面に対応する2つの断層画像の一方又は両方に注目組織をカバーする関心領域をユーザー設定させ、その関心領域内において後述する相関演算を行わせるようにしてもよい。
【0057】
S103では、各走査面上においてフレーム間で走査面データを用いて相関演算が実行され、上述したような演算原理にしたがって回転角度θaが計算される。ちなみに相関演算はスキャンコンバート後における2つの画像フレームデータ間において実行されるが、スキャンコンバート前の送受波フレームデータ間において実行することも可能である。S104では、走査面セットすなわちバイプレーンが回転駆動され、上記で特定された回転角度θaに相当する位置に走査面セットが位置決めされる。S105ではその後においても継続的に走査面セットの位置決めを行うか否かが判断される。継続的にその位置決めを行えば、注目組織が非直線的な運動をする場合であっても、一方の断層画像上に常に注目組織をリアルタイム表示することが可能となる。
【0058】
したがって、以上のような動作を行えば、注目組織の運動に合わせて走査面セットの回転角度を適正に設定して、その結果として、少なくとも一方の断層画像上において常に注目組織の断面を観察することが可能となり、また組織の運動をより正確にトラッキングすることが可能となる。
【0059】
図12には、走査面セットの回転を行うと共に、他方の走査面を注目組織の運動に追従させて動的に傾斜運動させる実施形態がフローチャートとして示されている。
【0060】
S201及びS202では、図11に示したS101及びS102と同様の工程が実行される。S203では、上述した原理に基づいて三次元移動ベクトルが計算される。そして、S204では走査面セットが回転され、さらに他方の走査面である運動方向に直交する走査面が注目組織に合わせて傾斜制御される。そしてS205においてはリアルタイムで上記の制御を実行するか否かが判断される。
【0061】
このような実施形態によれば、2つの断層画像を表示させた場合において、一方の断層画像上において注目組織を常時表示させることができ、特に、断層画像上において注目組織の運動を表現でき、他方の断層画像においても注目組織の断面を常時表示させることが可能となる。なお、それぞれの断層画像上に他の断層画像の位置を表すライン状のマーカーを表示するのが望ましい。
【0062】
次に、図13〜図17を用いて更に他の実施形態について説明する。
【0063】
図13には、直交する第1走査面及び第2走査面に対応する2つの断層画像が示されている。ここで、(A)に示す断層画像上においては例えば心臓の短軸断層像が示されており、(B)には心臓の長軸断層像が示されている。この例では、(A)に示す短軸断層像上において心臓の内腔が楕円近似される。その楕円が符号102によって表されている。このような図形近似は公知の手法を用いて行うことができ、例えばエッジ検出による輪郭抽出及び楕円パターンフィッティングなどの手法を適用することができる。その楕円102について水平軸104の長さが演算される。この水平軸は送受波の中心軸に直交する軸である。走査面セットを一定角度ピッチΔθで順次回転させつつ、各回転位置において楕円102を特定すると共に、その水平軸104の長さを演算すれば、水平軸104の長さが最も小さくなった角度位置を適正角度として特定することが可能となる。つまり、図14に示されるように、短軸像を取得するための走査面が心腔に対して斜めに傾くと、楕円102における水平軸104の長さが増大することになるため、そのような水平軸104の長さの変動をもって適正な回転角度を特定するものである。短軸断層像が適正に設定されれば、それと直交する長軸断層像も適正に形成されることになる。
【0064】
この実施形態においては、図2に示した位置決め情報演算部32に代えて、各フレームについて楕円近似及び水平軸長演算を実行し、また最小の水平軸長を特定することによってその時の回転角度を特定する演算処理部が設けられる。また、位置決め制御部40が回転試行制御及び最終的な回転角度位置決め制御を実行する。それ以外の構成は基本的に図2に示した構成を採用しうる。
【0065】
以上の手法をフローチャートとして表したのが図15である。S301及びS302では、上記のS101及びS102と同様の工程が実行される。S303では、プローブあるいは走査面セットが一定の角度ピッチΔθだけ回転される。S304では、その回転角度位置において形成された断層画像上においてここでは短軸断層像とみなされる画像において近似楕円が設定される。
【0066】
そして、S305では、その画像上において水平軸の長さが計算される。S306では、一定の角度範囲±α°(例えば±45°)にわたって走査面セットの回転走査がなされたか否かが判断され、なされていなければS303からの工程が繰り返し実行される。そして、S307では、最小の水平軸長となる角度θaが判定され、S308では当該角度θaに走査面セットの角度位置が設定されることになる。S309ではこの工程を更に繰り返し実行させるか否かが判断される。
【0067】
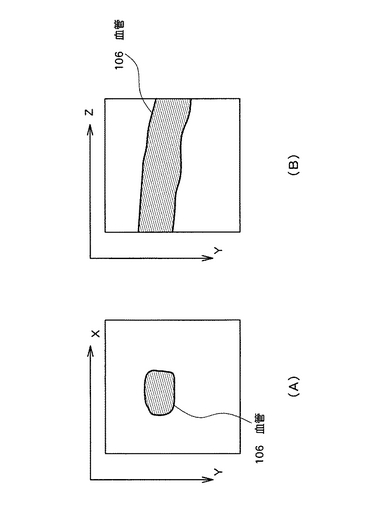
上記の手法は、例えば図16に示すような血管の2画面同時表示の場合においても適用することができる。すなわち図16の(A)には血管106についての横断面像が示されており、(B)には血管106についての縦断面像が示されている。このような表示に際して一定の角度ピッチをもって走査面セットを徐々に回転させつつ、各回転角度位置において例えば横断面に相当する画像上において血管内腔の面積(例えばピクセル数)を計算すれば、最も面積の小さい角度位置として適正角度を判定することが可能となる。
【0068】
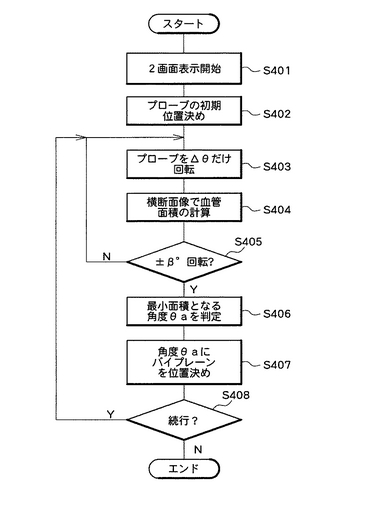
図17には、以上説明した手法がフローチャートとして示されている。S401及びS402では、上記のS101及びS102と同様の工程が実行される。S403ではプローブあるいは走査面セットが一定の角度ピッチΔθだけ回転される。そして、S404では、その状態において横断面に相当する画像について血管面積が計算される。そして、S405において一定の角度範囲±β°(例えば±45°)にわたって上記の工程が実行されたか否かが判断され、完了していなければS403からの各工程が繰り返し実行される。
【0069】
S406では、以上のように各角度位置において計算された血管面積の中で最小面積となる角度θaが判定され、S407においては当該角度θaに走査面セットが位置決めされることになる。S408ではこの処理を続行させるか否かが判断されている。
【0070】
この実施形態においては、図2に示した位置決め情報演算部32に代えて、各フレームについて血管面積の演算を実行し、また最小の血管面積を特定することによってその時の回転角度を特定する演算処理部が設けられる。また、位置決め制御部40が回転試行制御及び最終的な回転角度位置決め制御を実行する。それ以外の構成は基本的に図2に示した構成を採用しうる。
【0071】
よって、図13〜図17に示した実施形態によれば、走査面セット(あるいは一方の走査面)を回転走査させ、各角度位置において軸長あるいは面積などの物理量の定量を行うことにより、その物理量のプロファイルあるいは物理量の相対比較から最も最適な回転角度を見出すことができ、当該回転角度に走査面セットを位置決めすれば、対象臓器について正確な断面及びそれに直交する断面を画像として形成することが可能となる。
【図面の簡単な説明】
【0072】
【図1】走査面セットの回転により一方の走査面を注目組織の運動方向に合わせる方法を説明するための図である。
【図2】本実施形態に係る超音波診断装置の全体構成を示すブロック図である。
【図3】プローブを回転駆動させる機構を表す図である。
【図4】スキャナ装置の構成を説明するための図である。
【図5】2Dアレイ振動子を回転駆動させる構成を示す図である。
【図6】スイッチアレイの構造及びその差異を説明するための図である。
【図7】本実施形態に係るプローブの構成を示す断面図である。
【図8】第1走査面及び第2走査面上における注目組織の運動を説明するための図である。
【図9】注目組織の運動方向を表す角度の演算を説明するための図である。
【図10】三次元移動ベクトルの演算を説明するための図である。
【図11】本実施形態に係る装置の動作を説明するためのフローチャートである。
【図12】本実施形態に係る装置の他の動作例を説明するためのフローチャートである。
【図13】心臓についての短軸断層像及び長軸断層像を示す図である。
【図14】近似楕円と水平軸の長さを示す図である。
【図15】走査面セットを回転走査させて最適な回転角度を求める実施形態を説明するためのフローチャートである。
【図16】血管の横断面及び縦断面を示す図である。
【図17】走査面セットを回転走査させて適正な回転角度を求める他の実施形態を説明するためのフローチャートである。
【符号の説明】
【0073】
10 送受波機構、12 アレイ振動子、14 位置決め機構、16 送信部、20 受信部、24 画像形成部、28 表示処理部、32 位置決め情報演算部、40 位置決め制御部、42 主制御部、46 プローブ、48 クロスリニアアレイ振動子、50 回転駆動部、52 スキャナ装置、58 アーム機構、62 2Dアレイ振動子、64 回転駆動部。
【特許請求の範囲】
【請求項1】
互いに交差する第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、
前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データに基づいて、注目組織の移動情報を演算する移動情報演算手段と、
前記走査面セットを回転させる回転機構を有し、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる位置決め手段と、
を含むことを特徴とする超音波診断装置。
【請求項2】
請求項1記載の装置において、
前記回転機構は、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させることを特徴とする超音波診断装置。
【請求項3】
請求項2記載の装置において、
前記アレイ振動子は超音波探触子内に設けられ、
前記回転機構は、前記超音波探触子内に設けられ、前記アレイ振動子を回転させる機構であることを特徴とする超音波診断装置。
【請求項4】
請求項2記載の装置において、
前記アレイ振動子は超音波探触子内に設けられ、
前記回転機構は、前記超音波探触子を回転させる機構であることを特徴とする超音波診断装置。
【請求項5】
請求項3又は4記載の装置において、
前記超音波探触子を保持し、前記超音波探触子の位置を調整するアーム機構が設けられたことを特徴とする超音波診断装置。
【請求項6】
請求項1記載の装置において、
前記位置決め手段は、更に、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で他方の走査面の位置を変更する手段を含むことを特徴とする超音波診断装置。
【請求項7】
請求項1記載の装置において、
前記アレイ振動子は、二次元配列された複数の振動素子で構成され、
前記アレイ振動子をX方向に並んだ複数のY方向素子列として機能させるX方向走査用接続パターンと、前記アレイ振動子をY方向に並んだ複数のX方向素子列として機能させるY方向用接続パターンと、を切り換えるスイッチ回路が設けられ、
前記X方向走査用接続パターンの選択時に前記第1走査面が形成され、前記Y方向走査用接続パターンの選択時に前記第2走査面が形成されることを特徴とする超音波診断装置。
【請求項8】
請求項7記載の装置において、
前記スイッチ回路は前記アレイ振動子と共に超音波探触子内に設けられたことを特徴とする超音波診断装置。
【請求項9】
請求項1記載の装置において、
前記アレイ振動子はクロスリニアアレイ振動子であることを特徴とする超音波診断装置。
【請求項10】
直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、
前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データの内で少なくとも一方の走査面データに基づいて注目組織の移動情報を演算する移動情報演算手段と、
前記移動情報に基づいて、前記走査面セットの回転角度を演算する手段と、
前記回転角度を演算する手段の演算結果に基づいて、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させ、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる回転機構と、
前記第1走査面データに基づいて第1断層画像を形成し、前記第2走査面データに基づいて第2断層画像を形成する画像形成部と、
を含むことを特徴とする超音波診断装置。
【請求項11】
請求項10記載の装置において、
前記回転角度を演算する手段は、
前記第1走査面データに基づいて前記第1走査面上における注目組織の運動成分を演算する手段と、
前記第2走査面データに基づいて前記第2走査面上における注目組織の運動成分を演算する手段と、
前記第1走査面上における注目組織の運動成分と前記第2走査面上における注目組織の運動成分とに基づいて前記走査面セットの回転角度を求める手段と、
を含むことを特徴とする超音波診断装置。
【請求項12】
直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、
前記第1走査面を試行的に回転走査させた場合において、各回転角度ごとに第1走査面データに基づいて注目組織について計測を行う手段と、
前記各回転角度ごとの注目組織についての計測結果に基づいて前記走査面セットの適正回転角度を判定する手段と、
前記走査面セットを前記適正回転角度に位置決めし、これにより、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の横断面位置に位置決めし、且つ、前記第1走査面及び前記第2走査面の内で他方の走査面を前記注目組織の縦断面位置に位置決めする手段と、
を含むことを特徴とする超音波診断装置。
【請求項13】
請求項12記載の装置において、
前記計測結果は前記注目組織の軸長であることを特徴とする超音波診断装置。
【請求項14】
請求項12記載の装置において、
前記計測結果は前記注目組織の面積であることを特徴とする超音波診断装置。
【請求項1】
互いに交差する第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、
前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データに基づいて、注目組織の移動情報を演算する移動情報演算手段と、
前記走査面セットを回転させる回転機構を有し、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる位置決め手段と、
を含むことを特徴とする超音波診断装置。
【請求項2】
請求項1記載の装置において、
前記回転機構は、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させることを特徴とする超音波診断装置。
【請求項3】
請求項2記載の装置において、
前記アレイ振動子は超音波探触子内に設けられ、
前記回転機構は、前記超音波探触子内に設けられ、前記アレイ振動子を回転させる機構であることを特徴とする超音波診断装置。
【請求項4】
請求項2記載の装置において、
前記アレイ振動子は超音波探触子内に設けられ、
前記回転機構は、前記超音波探触子を回転させる機構であることを特徴とする超音波診断装置。
【請求項5】
請求項3又は4記載の装置において、
前記超音波探触子を保持し、前記超音波探触子の位置を調整するアーム機構が設けられたことを特徴とする超音波診断装置。
【請求項6】
請求項1記載の装置において、
前記位置決め手段は、更に、前記注目組織の移動情報に基づいて、前記第1走査面及び前記第2走査面の内で他方の走査面の位置を変更する手段を含むことを特徴とする超音波診断装置。
【請求項7】
請求項1記載の装置において、
前記アレイ振動子は、二次元配列された複数の振動素子で構成され、
前記アレイ振動子をX方向に並んだ複数のY方向素子列として機能させるX方向走査用接続パターンと、前記アレイ振動子をY方向に並んだ複数のX方向素子列として機能させるY方向用接続パターンと、を切り換えるスイッチ回路が設けられ、
前記X方向走査用接続パターンの選択時に前記第1走査面が形成され、前記Y方向走査用接続パターンの選択時に前記第2走査面が形成されることを特徴とする超音波診断装置。
【請求項8】
請求項7記載の装置において、
前記スイッチ回路は前記アレイ振動子と共に超音波探触子内に設けられたことを特徴とする超音波診断装置。
【請求項9】
請求項1記載の装置において、
前記アレイ振動子はクロスリニアアレイ振動子であることを特徴とする超音波診断装置。
【請求項10】
直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、
前記第1走査面の第1走査面データ及び前記第2走査面の第2走査面データの内で少なくとも一方の走査面データに基づいて注目組織の移動情報を演算する移動情報演算手段と、
前記移動情報に基づいて、前記走査面セットの回転角度を演算する手段と、
前記回転角度を演算する手段の演算結果に基づいて、前記第1走査面と前記第2走査面とが交差する中心線の回りで前記走査面セットを回転させ、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の移動方向に合わせる回転機構と、
前記第1走査面データに基づいて第1断層画像を形成し、前記第2走査面データに基づいて第2断層画像を形成する画像形成部と、
を含むことを特徴とする超音波診断装置。
【請求項11】
請求項10記載の装置において、
前記回転角度を演算する手段は、
前記第1走査面データに基づいて前記第1走査面上における注目組織の運動成分を演算する手段と、
前記第2走査面データに基づいて前記第2走査面上における注目組織の運動成分を演算する手段と、
前記第1走査面上における注目組織の運動成分と前記第2走査面上における注目組織の運動成分とに基づいて前記走査面セットの回転角度を求める手段と、
を含むことを特徴とする超音波診断装置。
【請求項12】
直交関係にある第1走査面及び第2走査面で構成される走査面セットを形成するアレイ振動子と、
前記第1走査面を試行的に回転走査させた場合において、各回転角度ごとに第1走査面データに基づいて注目組織について計測を行う手段と、
前記各回転角度ごとの注目組織についての計測結果に基づいて前記走査面セットの適正回転角度を判定する手段と、
前記走査面セットを前記適正回転角度に位置決めし、これにより、前記第1走査面及び前記第2走査面の内で一方の走査面を前記注目組織の横断面位置に位置決めし、且つ、前記第1走査面及び前記第2走査面の内で他方の走査面を前記注目組織の縦断面位置に位置決めする手段と、
を含むことを特徴とする超音波診断装置。
【請求項13】
請求項12記載の装置において、
前記計測結果は前記注目組織の軸長であることを特徴とする超音波診断装置。
【請求項14】
請求項12記載の装置において、
前記計測結果は前記注目組織の面積であることを特徴とする超音波診断装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2006−6686(P2006−6686A)
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願番号】特願2004−189279(P2004−189279)
【出願日】平成16年6月28日(2004.6.28)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願日】平成16年6月28日(2004.6.28)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
[ Back to top ]