
超音波診断装置
【課題】診断対象の形態に応じた診断対象の表示画像を実現する。
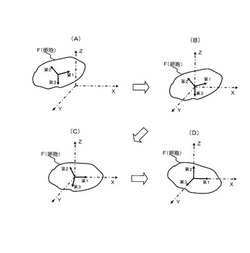
【解決手段】第1軸から第3軸により特定される診断座標系は、卵胞Fの長軸と短軸を基準とした座標系であり、その原点は卵胞Fの重心位置である。表示座標系はXYZ座標系である。(A)から、表示座標系に対して診断座標系を平行移動させて互いの原点を一致させて(B)となる。次に、卵胞Fの長軸に対応した診断座標系の第1軸と、この第1軸との間の角度が最も小さいX軸が重なるように診断座標系が回転されて(C)となる。さらに、卵胞Fの短軸に対応した診断座標系の第2軸と、この第2軸との間の角度が最も小さいZ軸が重なるように診断座標系が回転されて(D)となる。そして、卵胞Fの断層画像として、Z軸とX軸とを含んだ平面による画像と、Y軸とZ軸とを含んだ平面による画像と、X軸とY軸とを含んだ平面による画像が形成される。
【解決手段】第1軸から第3軸により特定される診断座標系は、卵胞Fの長軸と短軸を基準とした座標系であり、その原点は卵胞Fの重心位置である。表示座標系はXYZ座標系である。(A)から、表示座標系に対して診断座標系を平行移動させて互いの原点を一致させて(B)となる。次に、卵胞Fの長軸に対応した診断座標系の第1軸と、この第1軸との間の角度が最も小さいX軸が重なるように診断座標系が回転されて(C)となる。さらに、卵胞Fの短軸に対応した診断座標系の第2軸と、この第2軸との間の角度が最も小さいZ軸が重なるように診断座標系が回転されて(D)となる。そして、卵胞Fの断層画像として、Z軸とX軸とを含んだ平面による画像と、Y軸とZ軸とを含んだ平面による画像と、X軸とY軸とを含んだ平面による画像が形成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、超音波診断装置に関し、特に診断対象の表示画像を形成する技術に関する。
【背景技術】
【0002】
組織等の超音波画像を診断に適した表示画像で表示する技術が従来から知られており、その表示画像は、組織等の種類や診断内容に応じて多種多様である。そして、その組織等として、生体内の複数の卵胞も超音波診断の対象とされる。
【0003】
各卵胞は概ね楕円形に近い形状で観測される場合が多く、そのため、例えば各卵胞の長手方向に沿った長軸やそれに直交する短軸などが各卵胞の診断において目安とされる。それに伴い、例えば、三次元的に超音波画像データを得て各卵胞の切断面画像を表示させる場合に、その卵胞の長軸や短軸を含んだ切断面画像を望むユーザも少なくない。
【0004】
ところが、各卵胞についてその長軸や短軸を含むように切断面の位置を設定するにあたり、その設定をユーザが手動で行うとユーザに煩雑な操作を強いることになる。特に、生体内においては多数の卵胞が密集しており、多数の卵胞の各々について手動で切断面を設定するには多大な労力が必要とされてしまう。
【0005】
こうした状況において、本願の発明者は、例えば卵胞等の診断対象に関して診断に適した表示画像を形成する技術について研究開発を重ねてきた。その表示画像の形成においては、診断対象の形態、つまり診断対象の大きさや形状などを参照することが望ましい。この診断対象の形態を示す特徴量の一例として、診断対象の長手方向に沿って特定される長軸(特許文献1参照)を挙げることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3802508号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述した研究開発の過程において成されたものであり、その目的は、診断対象の形態に応じた診断対象の表示画像を実現することにある。
【課題を解決するための手段】
【0008】
上記目的にかなう好適な超音波診断装置は、診断領域に対して超音波を送受するプローブと、プローブを制御することにより診断領域から受信信号を得る送受信部と、受信信号に基づいて形成される診断領域の画像データ内において診断対象の画像データを特定する対象特定部と、診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、を有することを特徴とする。
【0009】
上記構成において、診断領域の画像データは、例えば、2次元的に配列された複数のエコーデータで構成されてもよいし、3次元的に配列された複数のボクセルデータで構成されてもよい。診断領域の画像データが2次元のデータであれば、診断座標系と表示座標系は2次元座標であることが望ましい。診断領域の画像データが3次元のデータであれば、診断座標系と表示座標系は3次元座標または2次元座標であることが望ましい。また、診断座標系と表示座標系は直交座標系であることが望ましいものの、例えば、超音波プローブの走査態様に適した直交座標系以外の座標系が用いられてもよい。
【0010】
上記構成においては、表示座標系と診断座標系とが互いに整合される。例えば、ある整合条件を満たすように、一方の座標系が他方の座標系に配置される。整合条件とは、例えば、一方の座標系を定める座標軸や座標面と他方の座標系を定める座標軸や座標面との間の相対的な配置関係等である。一例として、表示座標系の一つの座標軸と診断座標系の一つの座標軸とを互いに重ね合わせる態様がある。もちろん、表示座標系の一つの座標軸と診断座標系の一つの座標軸が、ある交差角度を伴って交差するように整合されてもよい。
【0011】
そして、上記構成によれば、表示座標系に診断対象の画像データを配置するにあたり、診断対象の形態を基準とした診断座標系と表示座標系が互いに整合されるため、診断対象の形態に応じた画像データの配置が実現され、診断対象の形態に応じた診断対象の表示画像を形成することが可能になる。
【0012】
望ましい具体例において、前記座標系設定部は、診断対象の形態に応じて特定される基準軸を座標軸に含んだ診断座標系を設定し、前記座標系整合部は、表示座標系の一つの座標軸と前記基準軸とを互いに重ね合わせることにより、表示座標系と診断座標系とを互いに整合させる、ことを特徴とする。
【0013】
望ましい具体例において、前記座標系設定部は、診断対象の長手方向に沿って特定される長軸を座標軸に含んだ診断座標系を設定し、前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせる、ことを特徴とする。
【0014】
望ましい具体例において、前記座標系設定部は、診断対象の長軸に加えて長軸に直交する短軸を座標軸に含んだ診断座標系を設定し、前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせ、表示座標系の他の座標軸と前記短軸とを互いに重ね合わせる、ことを特徴とする。
【0015】
望ましい具体例において、前記座標系整合部は、表示座標系の複数の座標軸のうち前記長軸との間の角度が最も小さい座標軸と前記長軸とを互いに重ね合わせる、ことを特徴とする。
【0016】
望ましい具体例において、前記座標系設定部は、診断対象の画像データに基づいた主成分分析により得られる診断対象の長軸と短軸を座標軸とする診断座標系を設定する、ことを特徴とする。
【0017】
また、上記目的にかなう好適な超音波画像処理装置は、超音波の画像データ内において診断対象の画像データを特定する対象特定部と、診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、を有することを特徴とする。
【0018】
例えば、上述した対象特定部と座標系設定部と座標系整合部の機能を実現するためのプログラムを利用することにより、コンピュータにこれらの機能を実現させて、当該コンピュータを前記超音波画像処理装置として機能させてもよい。
【発明の効果】
【0019】
本発明により、診断対象の形態に応じた診断対象の表示画像を形成することが可能になる。
【図面の簡単な説明】
【0020】
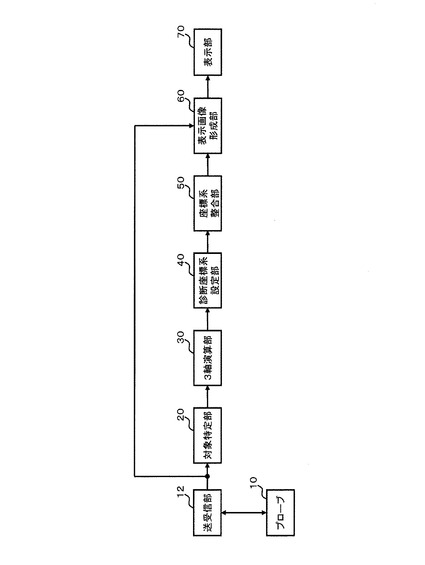
【図1】本発明の実施において好適な超音波診断装置の全体構成を示す図である。
【図2】対象特定部における処理を説明するための図である。
【図3】三次元データ空間内におけるフィルタの走査を説明するための図である。
【図4】膨張処理におけるフィルタ処理を説明するための図である。
【図5】卵胞の長軸と2つの短軸を説明するための図である。
【図6】卵胞を基準とした診断座標系を示す図である。
【図7】表示座標系と診断座標系の整合を説明するための図である。
【図8】表示座標系を基準とした断面を説明するための図である。
【図9】表示画像の具体例を示す図である。
【発明を実施するための形態】
【0021】
図1は、本発明の実施において好適な超音波診断装置の全体構成を示す図である。プローブ10は、診断対象を含む領域に対して超音波を送受波する超音波プローブである。プローブ10は、超音波を送受する複数の振動素子を備えており、複数の振動素子が送受信部12によって送信制御されて送信ビームが形成される。また、複数の振動素子が診断対象を含む領域内から得られる超音波を受波し、これにより得られた信号が送受信部12へ出力され、送受信部12が受信ビームを形成して受信ビームに沿ってエコーデータが収集される。
【0022】
プローブ10は、超音波ビーム(送信ビームと受信ビーム)を三次元空間内において走査して立体的にエコーデータを収集する三次元プローブが好適である。例えば、一次元的に配列された複数の振動素子(1Dアレイ振動子)によって電子的に形成される走査面を機械的に動かすことにより超音波ビームが立体的に走査される。また、二次元的に配列された複数の振動素子(2Dアレイ振動子)を電子的に制御して超音波ビームを立体的に走査してもよい。もちろん、超音波ビームを断層面内において走査する二次元の超音波プローブが利用されてもよい。
【0023】
三次元空間内において超音波ビームが走査されてエコーデータが収集されると、その三次元空間に対応した三次元データ空間を構成する複数のボクセルについてのエコーデータ(ボクセルデータ)が図示しないメモリなどに記憶される。そして、三次元データ空間を構成する複数のボクセルに対して、対象特定部20以降の各部において各種の処理が実行される。そこで、それら各種の処理について説明する。なお、図1に示した部分(構成)については、以下の説明において図1の符号を利用する。
【0024】
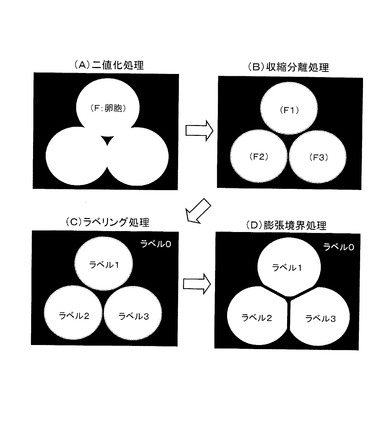
図2は、対象特定部20における処理を説明するための図である。図2(A)は、二値化処理を示している。対象特定部20は三次元データ空間を構成する複数のボクセルに対して二値化処理を施すことにより、図2(A)に示す二値化処理後の画像データを形成する。本実施形態における診断対象としては、生体内の卵胞が好適である。対象特定部20は、二値化のための閾値と各ボクセルのボクセル値(エコーデータの大きさ)を比較することにより、卵胞Fに対応するボクセルとそれ以外のボクセルとを識別する。そして、例えば、卵胞Fに対応するボクセルのボクセル値を「1」とし、それ以外のボクセルのボクセル値を「0」とする。図2(A)においては卵胞Fに対応するボクセル群が白で描かれており、それ以外の背景に相当するボクセル群が黒で描かれている。
【0025】
生体内において複数の卵胞は互いに密着して密集している。そのため、超音波画像内においては、図2(A)に示すように、複数の卵胞Fが互いに連結した状態で画像化され、各卵胞Fの大きさや形状等を個別に確認することは難しい。そこで、本実施形態においては、後に説明する各種の処理により複数の卵胞Fが互いに分割される。なお、図2においては各画像データが二次元的に描かれているものの、各種の処理は三次元データ空間内において三次元的に実行される。
【0026】
図2(B)は、収縮分離処理を示している。対象特定部20は、三次元データ空間を構成する二値化処理後のボクセルデータ内において、つまり図2(A)に示す二値化画像データ内において、複数の卵胞Fに対して収縮処理を施し、図2(B)に示すように複数の卵胞Fを卵胞F1〜F3に分離する。対象特定部20は、段階的に卵胞Fを収縮させる収縮処理をn回(nは自然数)に亘って繰り返し実行する。その各段階における収縮処理には、収縮処理用のフィルタが利用され、そのフィルタが三次元データ空間内の全域に亘って走査される。
【0027】
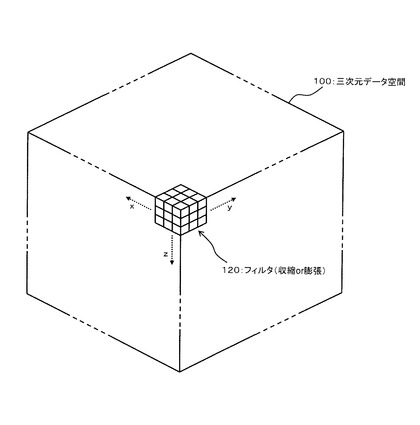
図3は、三次元データ空間100内におけるフィルタ120の走査を説明するための図である。図3において、三次元データ空間100は、xyz直交座標系で示されている。また、フィルタ120は、x軸方向とy軸方向とz軸方向のそれぞれの長さが3個のボクセルに相当し、合計27個のボクセルに相当する立体的な構成となっている。フィルタ120の中心に位置するボクセルが注目ボクセルであり、それを取り囲む26個のボクセルが周辺ボクセルである。そして、三次元データ空間100内の全てのボクセルが注目ボクセルとなるように、フィルタ120がx軸方向とy軸方向とz軸方向に移動されて三次元データ空間100内の全域に亘って走査される。
【0028】
収縮分離処理では、各走査位置において、フィルタ120内の26個の周辺ボクセルの中に1つでもボクセル値「0」のボクセルがあれば、フィルタ120の中心に位置する注目ボクセルのボクセル値が「0」とされる。例えば、注目ボクセルが「1(卵胞)」であり、周辺ボクセルの中に1つでもボクセル値「0(背景)」のボクセルがあれば、その注目ボクセルが「0(背景)」に変換される。そして、フィルタ120が三次元データ空間100内の全域に亘って一通り走査され、各走査位置においてフィルタ処理が施されることにより、1段階の収縮処理が終了する。なお、注目ボクセルに関するボクセル値の変換は、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に実行される。つまり、フィルタ120が走査されている途中においては、ボクセル値の変換は行われず、どの走査位置においても変換前のボクセル値を対象としてフィルタ処理が実行される。
【0029】
こうして、1段階の収縮処理が終了し、その結果に基づいてボクセル値の変換が行われると、その変換後のボクセル値で構成される三次元データ空間100に対して、2段階目の収縮処理が実行される。2段階目の収縮処理においても、1段階目と同じフィルタ処理が実行される。つまり、各走査位置において、フィルタ120内の26個の周辺ボクセルの中に1つでもボクセル値「0」のボクセルがあれば、フィルタ120の中心に位置する注目ボクセルのボクセル値が「0」とされ、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に、ボクセル値が変換される。
【0030】
対象特定部20は、この段階的な収縮処理をn回(nは自然数)に亘って繰り返し実行する。この繰り返し回数nは、各ボクセルの大きさやフィルタの大きさなどに応じて適宜に決定され、例えば10以内程度に設定される。もちろん、ユーザが回数nを調整できるようにしてもよい。
【0031】
なお、二次元の場合には、図3に示すフィルタ120に代えて、縦と横の長さがそれぞれ3個のボクセルに相当する合計9個のボクセルに対応した二次元フィルタを利用し、中心に位置するボクセルを注目ボクセルとし、それを取り囲む8個のボクセルを周辺ボクセルとすればよい。
【0032】
図2に戻り、収縮処理により図2(B)に示すように複数の卵胞F1〜F3に分離されると、対象特定部20は、三次元データ空間を構成する収縮処理後のボクセルデータ内において、つまり図2(B)に示す収縮処理後の画像データ内において、ラベリング処理を施し、複数の卵胞F1〜F3に対して互いに異なるラベルを割り当てる。ラベリング処理としては公知の手法を用いることができ、例えば三次元データ空間内において同じボクセル値を持つ複数のボクセルの塊が検出されて各塊ごとにラベル番号が付与される。例えば、図2(C)に示すように、ボクセル値「0」の塊である背景部分に対してラベル0が割り当てられ、ボクセル値「1」の塊である卵胞F1〜F3に対して、それぞれラベル1〜3が割り当てられる。
【0033】
ラベリング処理が施されると、対象特定部20は、三次元データ空間を構成するラベリング処理後のボクセルデータ内において、つまり図2(C)に示すラベリング処理後の画像データ内において、複数の卵胞の各々に対して膨張処理を施す。その膨張処理において各卵胞から得られる膨張部分には、その卵胞のラベルが割り当てられ、さらに、膨張処理されることにより互いに重なり合う膨張部分(膨張した卵胞)同士の重複部分に境界を形成しつつ、複数の卵胞の大きさが復元される。これにより、図2(D)に示すように、互いに異なるラベルに対応した卵胞間に境界(背景画素)が形成されつつ、各卵胞の大きさが収縮処理前(二値化処理直後)の大きさに復元される。
【0034】
対象特定部20は、段階的に卵胞Fを膨張させる膨張処理をn回(nは収縮処理の回数と同じ)に亘って繰り返し実行する。その各段階における膨張処理には、膨張処理用のフィルタが利用され、そのフィルタが三次元データ空間内の全域に亘って走査される。膨張処理においても、図3に示した合計27個のボクセルに相当する立体的なフィルタ120が利用され、フィルタ120の中心に位置するボクセルが注目ボクセルとされ、それを取り囲む26個のボクセルが周辺ボクセルとされる。そして、三次元データ空間100内の全てのボクセルが注目ボクセルとなるように、フィルタ120がx軸方向とy軸方向とz軸方向に移動されて三次元データ空間100内の全域に亘って走査される。但し、収縮処理と膨張処理とではフィルタ処理が異なっている。
【0035】
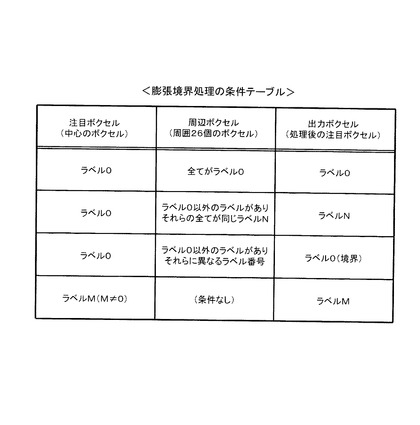
図4は、膨張処理におけるフィルタ処理を説明するための図であり、図4には、境界を形成しつつ膨張させる処理(膨張境界処理)におけるボクセル値の変換に関する条件テーブルが示されている。膨張境界処理においては、各ボクセルのラベル値が参照される。
【0036】
フィルタ120(図3)の中心に位置する注目ボクセルがラベル0(背景)の場合において、26個の周辺ボクセルの全てがラベル0(背景)であれば、注目ボクセルはラベル0とされる。また、注目ボクセルがラベル0(背景)の場合において、26個の周辺ボクセルの中にラベル0以外(卵胞)のラベルがあり、それらの全てが同じラベルN(同一の卵胞)であれば、注目ボクセルはラベルNに変換される。つまり、ラベルNの卵胞が膨張されることになる。
【0037】
さらに、注目ボクセルがラベル0(背景)の場合において、26個の周辺ボクセルの中にラベル0以外(卵胞)のラベルがあり、それらの中に互いに異なるラベル番号(互いに異なる卵胞)が含まれていれば、注目ボクセルはラベル0とされる。つまり、注目ボクセルがラベル0に維持され、互いに異なる卵胞の境界となる。
【0038】
一方、フィルタ120の中心に位置する注目ボクセルがラベルM(卵胞)の場合には、周辺ボクセルの状況に関わらず、注目ボクセルがラベルMに維持される。
【0039】
そして、図3に示すフィルタ120が三次元データ空間100内の全域に亘って一通り走査され、各走査位置において、図4に示した条件に従ってフィルタ処理が施されることにより、1段階の膨張境界処理が終了する。なお、注目ボクセルに関するラベル値の変換は、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に実行される。つまり、フィルタ120が走査されている途中においては、ラベル値の変換は行われず、どの走査位置においても変換前のラベル値を対象としてフィルタ処理が実行される。
【0040】
こうして、1段階の膨張境界処理が終了し、その結果に基づいてラベル値の変換が行われると、その変換後のラベル値で構成される三次元データ空間100に対して、2段階目の膨張境界処理が実行される。2段階目の膨張境界処理においても、1段階目と同じフィルタ処理が実行される。つまり、各走査位置において、図4に示した条件に従ってフィルタ処理が施され、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に、ラベル値が変換される。
【0041】
対象特定部20は、この段階的な膨張境界処理をn回に亘って繰り返し実行する。この繰り返し回数nは、収縮処理の繰り返し回数nと同じであることが望ましい。こうして、図2(D)に示したように、互いに異なるラベルに対応した卵胞間に境界(背景画素)が形成されつつ、各卵胞の大きさが収縮処理前の大きさに復元される。
【0042】
なお、膨張境界処理においても、二次元の場合には、図3に示すフィルタ120に代えて、縦と横の長さがそれぞれ3個のボクセルに相当する合計9個のボクセルに対応した二次元フィルタを利用し、中心に位置するボクセルを注目ボクセルとし、それを取り囲む8個のボクセルを周辺ボクセルとすればよい。
【0043】
本実施形態においては、図2に示したように、互いに密着して密集していた複数の卵胞が互いに分離されて特定される。さらに、図2(D)に示したように、各卵胞に対して個別のラベルが対応付けられていれば、各ラベルにより対応する卵胞を特定することが可能になり、各ラベルごとにそのラベルに対応した各卵胞の大きさや形状に関する計測値を算出することなどが可能になる、例えば、各ラベルごとにそのラベルに対応した各卵胞の体積や長軸の長さや短軸の長さなどが算出されてもよい。
【0044】
なお、各卵胞を特定するにあたっては、例えば、ユーザが所望のラベルを指定することにより、そのラベルに対応した卵胞を特定することなどが可能である。また、各卵胞が分離されているので、複数の卵胞が表示された画像上において、ユーザがカーソル等の表示態様を操作して所望の卵胞を指定し、これにより特定された卵胞の画像のみを表示するようにしてもよい。
【0045】
本実施形態においては、ユーザによって指定された卵胞を表示する際に、その卵胞の形態に応じた表示画像が形成される。そして、卵胞の形態に係る特徴量として、図1の3軸演算部30は、卵胞の長軸と2つの短軸を特定する。
【0046】
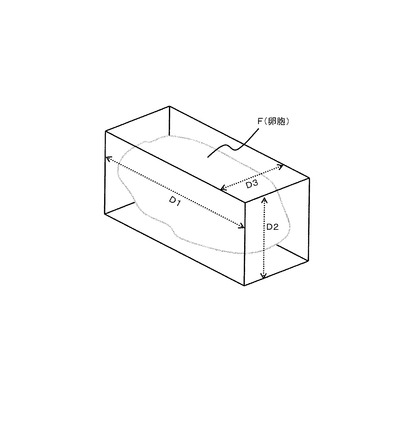
図5は、卵胞の長軸と2つの短軸を説明するための図である。本実施形態においては、特定された卵胞Fについて、図5に示すようにその卵胞Fに外接する最小の直方体を考えることにより、その直方体の辺の長さを卵胞Fの3軸長とする。例えば、図5に示す最長の辺D1が卵胞Fの長軸とされ、辺D1に直交する辺D2と辺D3が卵胞Fの2つの短軸とされる。
【0047】
図1に戻り、3軸演算部30は、卵胞の3軸を特定するにあたり、主成分分析の手法を利用する。主成分分析と呼ばれる公知の手法では、データのばらつきを最もよく表す方向、つまりデータの分散が最大となる方向を第1主成分とするものである。そして、本実施形態においては、主成分分析を行うにあたり、例えば、以下に説明する公知の共分散行列を利用する。
【0048】
共分散行列を得るためには、数1式により平均位置mが算出される。なお、数1式おいて、Piは、卵胞を構成するi番目の画素(ボクセル)についての三次元データ空間(図3参照)内における座標値であり、特定された卵胞を構成するi=1〜Nまでの全ての画素(ボクセル)の座標値が利用されて、平均位置(重心位置)mが算出される。
【0049】
【数1】

【0050】
そして、数1式の平均位置mを用いて、数2式に示す共分散行列Cが算出される。なお数2式に示す共分散行列Cは3×3の行列であり、数3式に示す6つの独立成分を持った対称行列となる。
【0051】
【数2】
【0052】
【数3】
【0053】
共分散行列Cを用いた主成分分析では、数2,3式により得られる共分散行列Cの固有ベクトルが算出され、最大の固有値に対応した固有ベクトルが第1主成分とされる。本実施形態においては、共分散行列Cを利用して得られる第1主成分の方向を卵胞の長軸とする。これにより、卵胞の重心を通り卵胞の長手方向に沿った長軸が特定される。さらに、共分散行列Cを利用して得られる第2主成分と第3主成分のそれぞれの方向を卵胞の2つの短軸とする。例えば、第2主成分の方向が短軸1とされ、第3主成分の方向が短軸2とされる。こうして、卵胞の3軸として、長軸とそれに直交する2つの短軸が特定される。
【0054】
なお、卵胞の画像データ内において、重心とそれから最も遠い画素とを結ぶ直線に沿って長軸を設定してもよいが、最も遠い画素がノイズ等である場合も考えられるため、主成分分析による長軸の設定の方が望ましい。
【0055】
3軸演算部30により3軸が特定されると、診断座標系設定部40は、卵胞の形態を基準とした診断座標系を設定する。診断座標系設定部40は、卵胞の3軸を座標軸とする診断座標系を設定する。
【0056】
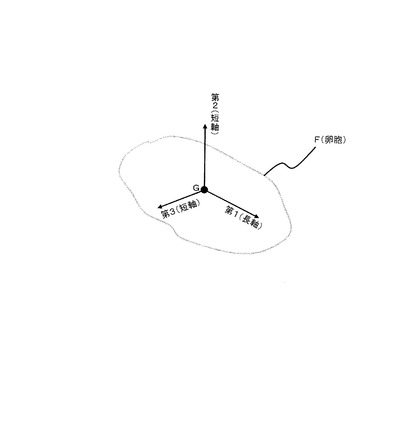
図6は、卵胞を基準とした診断座標系を示す図である。診断座標系設定部40は、卵胞Fの重心Gの位置を座標原点とし、第1主成分の方向つまり卵胞Fの長軸の方向である第1軸と、第2主成分の方向つまり卵胞Fの一方の短軸の方向である第2軸と、第3主成分の方向つまり卵胞Fの他方の短軸の方向である第3軸と、を座標軸とする図6に示す直交座標系を診断座標系とする。
【0057】
図1に戻り、診断座標系設定部40により診断座標系が設定されると、座標系整合部50は、表示画像の基準となる表示座標系と診断座標系とを互いに整合させて、表示座標系に卵胞の画像データを配置する。
【0058】
図7は、表示座標系と診断座標系の整合を説明するための図である。図7において、表示座標系は、XYZ直交座標系で示されている。表示座標系は、表示画像を形成する際の基準となる座標系であり、三次元データ空間(図3参照)に対する相対的な位置関係が明らかな座標系である。本実施形態では、三次元データ空間(図3参照)のXYZ直交座標系をそのまま表示座標系とする。
【0059】
また、図7において、診断座標系は、第1軸と第2軸と第3軸(図6参照)により特定される座標系である。診断座標系の第1軸から第3軸は、三次元データ空間内における各画素(ボクセル)の座標に基づいて、主成分分析により例えば数1式から数3式を利用して得られる軸であり、三次元データ空間内における位置や方向が特定されている。したがって、三次元データ空間のXYZ直交座標系を表示座標系とすると、その表示座標系に対する診断座標系の位置や方向が特定されている。
【0060】
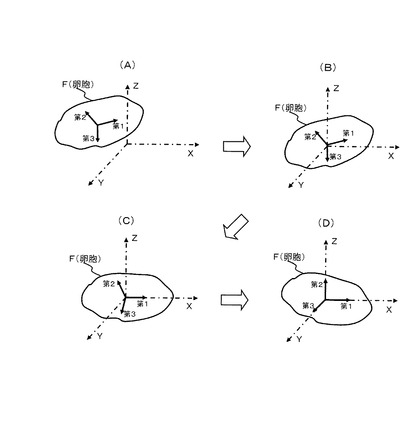
図7の(A)は、表示座標系(XYZ軸)上に特定された卵胞Fに関する診断座標系(第1軸から第3軸)の一例を示している。診断座標系は卵胞Fの長軸や短軸を基準とした座標系であるため、表示座標系内における卵胞Fの位置や向きに応じたものとなる。
【0061】
そこで、座標系整合部50は、まず、表示座標系に対して診断座標系を平行移動させて表示座標系の原点と診断座標系の原点を一致させる。もちろん、卵胞Fに関するボクセルデータ(画像データ)も診断座標系と共に平行移動される。
【0062】
図7の(B)は、診断座標系が平行移動された状態を示しており、表示座標系の原点の位置に診断座標系の原点が移動され、これにより、診断座標系の原点である卵胞Fの重心位置が表示座標系の原点に移動される。
【0063】
次に、座標系整合部50は、卵胞Fの長軸に対応した軸つまり診断座標系の第1軸と、表示座標系のXYZ軸の各々とを比較し、XYZ軸のうち第1軸との間の角度が最も小さい軸を特定する。例えば、第1軸とXYZ軸の各々との内積を比較して第1軸との間の角度が最も小さい軸を特定する。そして、特定された軸と第1軸が重なるように診断座標系が回転移動される。例えば、第1軸との間の角度が最も小さい軸としてX軸が特定された場合には、図7の(C)に示すように、X軸上に第1軸が重なるように診断座標系が回転され、卵胞Fの画像データも回転される。
【0064】
さらに、座標系整合部50は、卵胞Fの短軸に対応した診断座標系の第2軸と、表示座標系のうちの残りの軸とを比較し、第2軸との間の角度が最も小さい軸を特定する。例えば、第1軸とX軸とが重ね合わされた場合には、残りのY軸とZ軸のうち、第2軸との間の角度が最も小さい軸が特定される。そして、特定された軸と第2軸が重なるように診断座標系が回転移動される。例えば、第2軸との間の角度が最も小さい軸としてZ軸が特定された場合には、図7の(D)に示すように、Z軸上に第2軸が重なるように診断座標系が回転され、卵胞Fの画像データも回転される。
【0065】
なお、診断座標系が直交座標系であれば第1軸と第2軸がX軸とZ軸に重ね合わされることにより、第3軸がY軸に沿って配置される。図7の(D)においては、第3軸とY軸が互いに同じ向きに重ね合わされている。
図1に戻り、座標系整合部50により表示座標系と診断座標系が整合されて表示座標系に卵胞の画像データが配置されると、表示画像形成部60は、表示座標系に配置された卵胞の画像データに基づいて、その卵胞の表示画像を形成し、形成された表示画像が表示部70に表示される。その表示画像の形成においては、表示座標系を基準とした断面による卵胞の断層画像が形成される。
【0066】
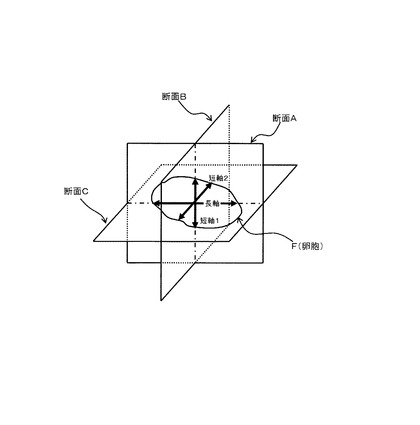
図8は、表示座標系を基準とした断面を説明するための図である。図8には、図7(D)に示した表示座標系と診断座標系の整合により表示座標系に配置された卵胞Fの画像データが示されている。図8において、断面Aは、表示座標系のZ軸とX軸とを含んだ平面であり、断面Bは、表示座標系のY軸とZ軸とを含んだ平面であり、断面Cは、表示座標系のX軸とY軸とを含んだ平面である。
【0067】
図7(D)に示したように表示座標系と診断座標系が整合されているため、第1軸に対応した卵胞Fの長軸がX軸上に配置され、第2軸に対応した卵胞Fの短軸1がZ軸上に配置され、第3軸に対応した卵胞Fの短軸2がY軸上に配置されている。したがって図8において、断面Aは、卵胞Fの長軸と短軸1を含んだ断面となり、断面Bは、卵胞Fの短軸1と短軸2を含んだ断面となり、断面Cは、卵胞Fの長軸と短軸2を含んだ断面となる。
【0068】
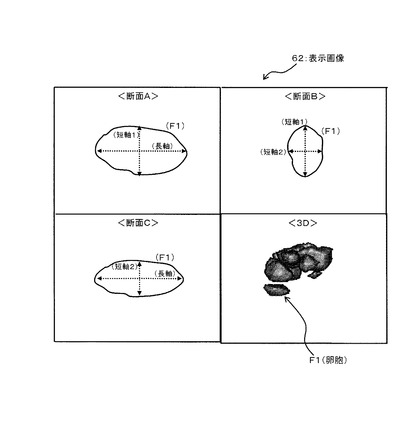
図9は、表示画像62の具体例を示す図である。図9に示す表示画像62を構成する画像のうち、<3D>は、複数の卵胞に関する三次元画像である。この三次元画像は、三次元空間内から収集されたエコーデータ(ボクセルデータ)に基づいて、例えばボリュームレンダリング処理により形成される。そのボリュームレンダリング処理における視点の位置をユーザが変更できる構成とすることにより、所望の方向から複数の卵胞を映し出した三次元画像を得ることができる。
【0069】
例えば、図9に示す三次元画像内において、ユーザが、所望の方向から複数の卵胞を映し出し、さらに、カーソル等の表示態様を移動させ、その表示態様を所望の卵胞の位置に合わせることにより、ユーザが診断したい卵胞を選択することができる。これにより、例えば図9の三次元画像内において卵胞F1が特定される。なお、三次元画像内において、色などの表示態様やマーカなどにより、特定された卵胞を他の卵胞と視覚的に識別できるように表示してもよい。
【0070】
例えば、三次元画像を利用してユーザにより卵胞F1が特定されると、3軸演算部30により卵胞F1の3軸が特定され(図5,数1式から数3式参照)、診断座標系設定部40により卵胞F1の3軸に対応した診断座標系が設定され(図6参照)、さらに、座標系整合部50により表示座標系と診断座標系が整合される(図7参照)。そして、表示画像形成部60により断面AからC(図8参照)における卵胞F1の断層画像が形成される。
【0071】
図9において、表示画像62を構成する画像のうち、<断面A>は、卵胞F1についての断面Aにおける断層画像であり、<断面B>は、卵胞F1についての断面Bにおける断層画像であり、<断面C>は、卵胞F1についての断面Cにおける断層画像である。表示座標系と診断座標系が整合されているため、断面Aには、卵胞F1の長軸と短軸1を含んだ断面が表示され、断面Bには、卵胞F1の短軸1と短軸2を含んだ断面が表示され、断面Cには、卵胞F1の長軸と短軸2を含んだ断面が表示される。
【0072】
このように、本実施形態においては、複数の卵胞の中からユーザが所望の卵胞を特定することにより、その特定された卵胞の3軸を含んだ断層画像が形成される。そのため、例えば、ユーザによる切断面の設定などのための煩雑な操作を低減することができ、望ましくは切断面の設定のための操作を省略することが可能になる。
【0073】
また、表示座標系と診断座標系の整合において、交差角度が最小となる座標軸同士を重ね合わせることにより、診断座標系の回転移動を極力小さくすることができ、その回転移動によりユーザが感じる視覚的な違和感を極力抑えることができる。
【0074】
なお、特定された卵胞F1について、長軸の長さや2つの短軸の長さや体積などの計測値が表示画像62の一部として表示されてもよい。また、複数の卵胞が互いに分離されて特定されているため(図2参照)、各卵胞について長軸の長さや2つの短軸の長さや体積などの計測値を算出し、複数の卵胞に関する計測値の一覧を表示するようにしてもよい。さらに、これら計測値の一覧の中からユーザが所望の卵胞を特定し、これにより特定された卵胞の断面が表示されてもよい。
【0075】
以上、本発明の好適な実施形態である超音波診断装置について説明したが、例えば、図1に示した対象特定部20と3軸演算部30と診断座標系設定部40と座標系整合部50と表示画像形成部60のうちの少なくとも一つをコンピュータにより実現し、そのコンピュータを超音波画像処理装置として機能させてもよい。
【0076】
なお、上述した実施形態は、あらゆる点で単なる例示にすぎず、本発明の範囲を限定するものではない。本発明は、その本質を逸脱しない範囲で各種の変形形態を包含する。
【符号の説明】
【0077】
10 プローブ、20 対象特定部、30 3軸演算部、40 診断座標系設定部、50 座標系整合部、60 表示画像形成部、70 表示部。
【技術分野】
【0001】
本発明は、超音波診断装置に関し、特に診断対象の表示画像を形成する技術に関する。
【背景技術】
【0002】
組織等の超音波画像を診断に適した表示画像で表示する技術が従来から知られており、その表示画像は、組織等の種類や診断内容に応じて多種多様である。そして、その組織等として、生体内の複数の卵胞も超音波診断の対象とされる。
【0003】
各卵胞は概ね楕円形に近い形状で観測される場合が多く、そのため、例えば各卵胞の長手方向に沿った長軸やそれに直交する短軸などが各卵胞の診断において目安とされる。それに伴い、例えば、三次元的に超音波画像データを得て各卵胞の切断面画像を表示させる場合に、その卵胞の長軸や短軸を含んだ切断面画像を望むユーザも少なくない。
【0004】
ところが、各卵胞についてその長軸や短軸を含むように切断面の位置を設定するにあたり、その設定をユーザが手動で行うとユーザに煩雑な操作を強いることになる。特に、生体内においては多数の卵胞が密集しており、多数の卵胞の各々について手動で切断面を設定するには多大な労力が必要とされてしまう。
【0005】
こうした状況において、本願の発明者は、例えば卵胞等の診断対象に関して診断に適した表示画像を形成する技術について研究開発を重ねてきた。その表示画像の形成においては、診断対象の形態、つまり診断対象の大きさや形状などを参照することが望ましい。この診断対象の形態を示す特徴量の一例として、診断対象の長手方向に沿って特定される長軸(特許文献1参照)を挙げることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3802508号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述した研究開発の過程において成されたものであり、その目的は、診断対象の形態に応じた診断対象の表示画像を実現することにある。
【課題を解決するための手段】
【0008】
上記目的にかなう好適な超音波診断装置は、診断領域に対して超音波を送受するプローブと、プローブを制御することにより診断領域から受信信号を得る送受信部と、受信信号に基づいて形成される診断領域の画像データ内において診断対象の画像データを特定する対象特定部と、診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、を有することを特徴とする。
【0009】
上記構成において、診断領域の画像データは、例えば、2次元的に配列された複数のエコーデータで構成されてもよいし、3次元的に配列された複数のボクセルデータで構成されてもよい。診断領域の画像データが2次元のデータであれば、診断座標系と表示座標系は2次元座標であることが望ましい。診断領域の画像データが3次元のデータであれば、診断座標系と表示座標系は3次元座標または2次元座標であることが望ましい。また、診断座標系と表示座標系は直交座標系であることが望ましいものの、例えば、超音波プローブの走査態様に適した直交座標系以外の座標系が用いられてもよい。
【0010】
上記構成においては、表示座標系と診断座標系とが互いに整合される。例えば、ある整合条件を満たすように、一方の座標系が他方の座標系に配置される。整合条件とは、例えば、一方の座標系を定める座標軸や座標面と他方の座標系を定める座標軸や座標面との間の相対的な配置関係等である。一例として、表示座標系の一つの座標軸と診断座標系の一つの座標軸とを互いに重ね合わせる態様がある。もちろん、表示座標系の一つの座標軸と診断座標系の一つの座標軸が、ある交差角度を伴って交差するように整合されてもよい。
【0011】
そして、上記構成によれば、表示座標系に診断対象の画像データを配置するにあたり、診断対象の形態を基準とした診断座標系と表示座標系が互いに整合されるため、診断対象の形態に応じた画像データの配置が実現され、診断対象の形態に応じた診断対象の表示画像を形成することが可能になる。
【0012】
望ましい具体例において、前記座標系設定部は、診断対象の形態に応じて特定される基準軸を座標軸に含んだ診断座標系を設定し、前記座標系整合部は、表示座標系の一つの座標軸と前記基準軸とを互いに重ね合わせることにより、表示座標系と診断座標系とを互いに整合させる、ことを特徴とする。
【0013】
望ましい具体例において、前記座標系設定部は、診断対象の長手方向に沿って特定される長軸を座標軸に含んだ診断座標系を設定し、前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせる、ことを特徴とする。
【0014】
望ましい具体例において、前記座標系設定部は、診断対象の長軸に加えて長軸に直交する短軸を座標軸に含んだ診断座標系を設定し、前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせ、表示座標系の他の座標軸と前記短軸とを互いに重ね合わせる、ことを特徴とする。
【0015】
望ましい具体例において、前記座標系整合部は、表示座標系の複数の座標軸のうち前記長軸との間の角度が最も小さい座標軸と前記長軸とを互いに重ね合わせる、ことを特徴とする。
【0016】
望ましい具体例において、前記座標系設定部は、診断対象の画像データに基づいた主成分分析により得られる診断対象の長軸と短軸を座標軸とする診断座標系を設定する、ことを特徴とする。
【0017】
また、上記目的にかなう好適な超音波画像処理装置は、超音波の画像データ内において診断対象の画像データを特定する対象特定部と、診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、を有することを特徴とする。
【0018】
例えば、上述した対象特定部と座標系設定部と座標系整合部の機能を実現するためのプログラムを利用することにより、コンピュータにこれらの機能を実現させて、当該コンピュータを前記超音波画像処理装置として機能させてもよい。
【発明の効果】
【0019】
本発明により、診断対象の形態に応じた診断対象の表示画像を形成することが可能になる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施において好適な超音波診断装置の全体構成を示す図である。
【図2】対象特定部における処理を説明するための図である。
【図3】三次元データ空間内におけるフィルタの走査を説明するための図である。
【図4】膨張処理におけるフィルタ処理を説明するための図である。
【図5】卵胞の長軸と2つの短軸を説明するための図である。
【図6】卵胞を基準とした診断座標系を示す図である。
【図7】表示座標系と診断座標系の整合を説明するための図である。
【図8】表示座標系を基準とした断面を説明するための図である。
【図9】表示画像の具体例を示す図である。
【発明を実施するための形態】
【0021】
図1は、本発明の実施において好適な超音波診断装置の全体構成を示す図である。プローブ10は、診断対象を含む領域に対して超音波を送受波する超音波プローブである。プローブ10は、超音波を送受する複数の振動素子を備えており、複数の振動素子が送受信部12によって送信制御されて送信ビームが形成される。また、複数の振動素子が診断対象を含む領域内から得られる超音波を受波し、これにより得られた信号が送受信部12へ出力され、送受信部12が受信ビームを形成して受信ビームに沿ってエコーデータが収集される。
【0022】
プローブ10は、超音波ビーム(送信ビームと受信ビーム)を三次元空間内において走査して立体的にエコーデータを収集する三次元プローブが好適である。例えば、一次元的に配列された複数の振動素子(1Dアレイ振動子)によって電子的に形成される走査面を機械的に動かすことにより超音波ビームが立体的に走査される。また、二次元的に配列された複数の振動素子(2Dアレイ振動子)を電子的に制御して超音波ビームを立体的に走査してもよい。もちろん、超音波ビームを断層面内において走査する二次元の超音波プローブが利用されてもよい。
【0023】
三次元空間内において超音波ビームが走査されてエコーデータが収集されると、その三次元空間に対応した三次元データ空間を構成する複数のボクセルについてのエコーデータ(ボクセルデータ)が図示しないメモリなどに記憶される。そして、三次元データ空間を構成する複数のボクセルに対して、対象特定部20以降の各部において各種の処理が実行される。そこで、それら各種の処理について説明する。なお、図1に示した部分(構成)については、以下の説明において図1の符号を利用する。
【0024】
図2は、対象特定部20における処理を説明するための図である。図2(A)は、二値化処理を示している。対象特定部20は三次元データ空間を構成する複数のボクセルに対して二値化処理を施すことにより、図2(A)に示す二値化処理後の画像データを形成する。本実施形態における診断対象としては、生体内の卵胞が好適である。対象特定部20は、二値化のための閾値と各ボクセルのボクセル値(エコーデータの大きさ)を比較することにより、卵胞Fに対応するボクセルとそれ以外のボクセルとを識別する。そして、例えば、卵胞Fに対応するボクセルのボクセル値を「1」とし、それ以外のボクセルのボクセル値を「0」とする。図2(A)においては卵胞Fに対応するボクセル群が白で描かれており、それ以外の背景に相当するボクセル群が黒で描かれている。
【0025】
生体内において複数の卵胞は互いに密着して密集している。そのため、超音波画像内においては、図2(A)に示すように、複数の卵胞Fが互いに連結した状態で画像化され、各卵胞Fの大きさや形状等を個別に確認することは難しい。そこで、本実施形態においては、後に説明する各種の処理により複数の卵胞Fが互いに分割される。なお、図2においては各画像データが二次元的に描かれているものの、各種の処理は三次元データ空間内において三次元的に実行される。
【0026】
図2(B)は、収縮分離処理を示している。対象特定部20は、三次元データ空間を構成する二値化処理後のボクセルデータ内において、つまり図2(A)に示す二値化画像データ内において、複数の卵胞Fに対して収縮処理を施し、図2(B)に示すように複数の卵胞Fを卵胞F1〜F3に分離する。対象特定部20は、段階的に卵胞Fを収縮させる収縮処理をn回(nは自然数)に亘って繰り返し実行する。その各段階における収縮処理には、収縮処理用のフィルタが利用され、そのフィルタが三次元データ空間内の全域に亘って走査される。
【0027】
図3は、三次元データ空間100内におけるフィルタ120の走査を説明するための図である。図3において、三次元データ空間100は、xyz直交座標系で示されている。また、フィルタ120は、x軸方向とy軸方向とz軸方向のそれぞれの長さが3個のボクセルに相当し、合計27個のボクセルに相当する立体的な構成となっている。フィルタ120の中心に位置するボクセルが注目ボクセルであり、それを取り囲む26個のボクセルが周辺ボクセルである。そして、三次元データ空間100内の全てのボクセルが注目ボクセルとなるように、フィルタ120がx軸方向とy軸方向とz軸方向に移動されて三次元データ空間100内の全域に亘って走査される。
【0028】
収縮分離処理では、各走査位置において、フィルタ120内の26個の周辺ボクセルの中に1つでもボクセル値「0」のボクセルがあれば、フィルタ120の中心に位置する注目ボクセルのボクセル値が「0」とされる。例えば、注目ボクセルが「1(卵胞)」であり、周辺ボクセルの中に1つでもボクセル値「0(背景)」のボクセルがあれば、その注目ボクセルが「0(背景)」に変換される。そして、フィルタ120が三次元データ空間100内の全域に亘って一通り走査され、各走査位置においてフィルタ処理が施されることにより、1段階の収縮処理が終了する。なお、注目ボクセルに関するボクセル値の変換は、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に実行される。つまり、フィルタ120が走査されている途中においては、ボクセル値の変換は行われず、どの走査位置においても変換前のボクセル値を対象としてフィルタ処理が実行される。
【0029】
こうして、1段階の収縮処理が終了し、その結果に基づいてボクセル値の変換が行われると、その変換後のボクセル値で構成される三次元データ空間100に対して、2段階目の収縮処理が実行される。2段階目の収縮処理においても、1段階目と同じフィルタ処理が実行される。つまり、各走査位置において、フィルタ120内の26個の周辺ボクセルの中に1つでもボクセル値「0」のボクセルがあれば、フィルタ120の中心に位置する注目ボクセルのボクセル値が「0」とされ、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に、ボクセル値が変換される。
【0030】
対象特定部20は、この段階的な収縮処理をn回(nは自然数)に亘って繰り返し実行する。この繰り返し回数nは、各ボクセルの大きさやフィルタの大きさなどに応じて適宜に決定され、例えば10以内程度に設定される。もちろん、ユーザが回数nを調整できるようにしてもよい。
【0031】
なお、二次元の場合には、図3に示すフィルタ120に代えて、縦と横の長さがそれぞれ3個のボクセルに相当する合計9個のボクセルに対応した二次元フィルタを利用し、中心に位置するボクセルを注目ボクセルとし、それを取り囲む8個のボクセルを周辺ボクセルとすればよい。
【0032】
図2に戻り、収縮処理により図2(B)に示すように複数の卵胞F1〜F3に分離されると、対象特定部20は、三次元データ空間を構成する収縮処理後のボクセルデータ内において、つまり図2(B)に示す収縮処理後の画像データ内において、ラベリング処理を施し、複数の卵胞F1〜F3に対して互いに異なるラベルを割り当てる。ラベリング処理としては公知の手法を用いることができ、例えば三次元データ空間内において同じボクセル値を持つ複数のボクセルの塊が検出されて各塊ごとにラベル番号が付与される。例えば、図2(C)に示すように、ボクセル値「0」の塊である背景部分に対してラベル0が割り当てられ、ボクセル値「1」の塊である卵胞F1〜F3に対して、それぞれラベル1〜3が割り当てられる。
【0033】
ラベリング処理が施されると、対象特定部20は、三次元データ空間を構成するラベリング処理後のボクセルデータ内において、つまり図2(C)に示すラベリング処理後の画像データ内において、複数の卵胞の各々に対して膨張処理を施す。その膨張処理において各卵胞から得られる膨張部分には、その卵胞のラベルが割り当てられ、さらに、膨張処理されることにより互いに重なり合う膨張部分(膨張した卵胞)同士の重複部分に境界を形成しつつ、複数の卵胞の大きさが復元される。これにより、図2(D)に示すように、互いに異なるラベルに対応した卵胞間に境界(背景画素)が形成されつつ、各卵胞の大きさが収縮処理前(二値化処理直後)の大きさに復元される。
【0034】
対象特定部20は、段階的に卵胞Fを膨張させる膨張処理をn回(nは収縮処理の回数と同じ)に亘って繰り返し実行する。その各段階における膨張処理には、膨張処理用のフィルタが利用され、そのフィルタが三次元データ空間内の全域に亘って走査される。膨張処理においても、図3に示した合計27個のボクセルに相当する立体的なフィルタ120が利用され、フィルタ120の中心に位置するボクセルが注目ボクセルとされ、それを取り囲む26個のボクセルが周辺ボクセルとされる。そして、三次元データ空間100内の全てのボクセルが注目ボクセルとなるように、フィルタ120がx軸方向とy軸方向とz軸方向に移動されて三次元データ空間100内の全域に亘って走査される。但し、収縮処理と膨張処理とではフィルタ処理が異なっている。
【0035】
図4は、膨張処理におけるフィルタ処理を説明するための図であり、図4には、境界を形成しつつ膨張させる処理(膨張境界処理)におけるボクセル値の変換に関する条件テーブルが示されている。膨張境界処理においては、各ボクセルのラベル値が参照される。
【0036】
フィルタ120(図3)の中心に位置する注目ボクセルがラベル0(背景)の場合において、26個の周辺ボクセルの全てがラベル0(背景)であれば、注目ボクセルはラベル0とされる。また、注目ボクセルがラベル0(背景)の場合において、26個の周辺ボクセルの中にラベル0以外(卵胞)のラベルがあり、それらの全てが同じラベルN(同一の卵胞)であれば、注目ボクセルはラベルNに変換される。つまり、ラベルNの卵胞が膨張されることになる。
【0037】
さらに、注目ボクセルがラベル0(背景)の場合において、26個の周辺ボクセルの中にラベル0以外(卵胞)のラベルがあり、それらの中に互いに異なるラベル番号(互いに異なる卵胞)が含まれていれば、注目ボクセルはラベル0とされる。つまり、注目ボクセルがラベル0に維持され、互いに異なる卵胞の境界となる。
【0038】
一方、フィルタ120の中心に位置する注目ボクセルがラベルM(卵胞)の場合には、周辺ボクセルの状況に関わらず、注目ボクセルがラベルMに維持される。
【0039】
そして、図3に示すフィルタ120が三次元データ空間100内の全域に亘って一通り走査され、各走査位置において、図4に示した条件に従ってフィルタ処理が施されることにより、1段階の膨張境界処理が終了する。なお、注目ボクセルに関するラベル値の変換は、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に実行される。つまり、フィルタ120が走査されている途中においては、ラベル値の変換は行われず、どの走査位置においても変換前のラベル値を対象としてフィルタ処理が実行される。
【0040】
こうして、1段階の膨張境界処理が終了し、その結果に基づいてラベル値の変換が行われると、その変換後のラベル値で構成される三次元データ空間100に対して、2段階目の膨張境界処理が実行される。2段階目の膨張境界処理においても、1段階目と同じフィルタ処理が実行される。つまり、各走査位置において、図4に示した条件に従ってフィルタ処理が施され、フィルタ120が三次元データ空間100内の全域に亘って一通り走査された後に、ラベル値が変換される。
【0041】
対象特定部20は、この段階的な膨張境界処理をn回に亘って繰り返し実行する。この繰り返し回数nは、収縮処理の繰り返し回数nと同じであることが望ましい。こうして、図2(D)に示したように、互いに異なるラベルに対応した卵胞間に境界(背景画素)が形成されつつ、各卵胞の大きさが収縮処理前の大きさに復元される。
【0042】
なお、膨張境界処理においても、二次元の場合には、図3に示すフィルタ120に代えて、縦と横の長さがそれぞれ3個のボクセルに相当する合計9個のボクセルに対応した二次元フィルタを利用し、中心に位置するボクセルを注目ボクセルとし、それを取り囲む8個のボクセルを周辺ボクセルとすればよい。
【0043】
本実施形態においては、図2に示したように、互いに密着して密集していた複数の卵胞が互いに分離されて特定される。さらに、図2(D)に示したように、各卵胞に対して個別のラベルが対応付けられていれば、各ラベルにより対応する卵胞を特定することが可能になり、各ラベルごとにそのラベルに対応した各卵胞の大きさや形状に関する計測値を算出することなどが可能になる、例えば、各ラベルごとにそのラベルに対応した各卵胞の体積や長軸の長さや短軸の長さなどが算出されてもよい。
【0044】
なお、各卵胞を特定するにあたっては、例えば、ユーザが所望のラベルを指定することにより、そのラベルに対応した卵胞を特定することなどが可能である。また、各卵胞が分離されているので、複数の卵胞が表示された画像上において、ユーザがカーソル等の表示態様を操作して所望の卵胞を指定し、これにより特定された卵胞の画像のみを表示するようにしてもよい。
【0045】
本実施形態においては、ユーザによって指定された卵胞を表示する際に、その卵胞の形態に応じた表示画像が形成される。そして、卵胞の形態に係る特徴量として、図1の3軸演算部30は、卵胞の長軸と2つの短軸を特定する。
【0046】
図5は、卵胞の長軸と2つの短軸を説明するための図である。本実施形態においては、特定された卵胞Fについて、図5に示すようにその卵胞Fに外接する最小の直方体を考えることにより、その直方体の辺の長さを卵胞Fの3軸長とする。例えば、図5に示す最長の辺D1が卵胞Fの長軸とされ、辺D1に直交する辺D2と辺D3が卵胞Fの2つの短軸とされる。
【0047】
図1に戻り、3軸演算部30は、卵胞の3軸を特定するにあたり、主成分分析の手法を利用する。主成分分析と呼ばれる公知の手法では、データのばらつきを最もよく表す方向、つまりデータの分散が最大となる方向を第1主成分とするものである。そして、本実施形態においては、主成分分析を行うにあたり、例えば、以下に説明する公知の共分散行列を利用する。
【0048】
共分散行列を得るためには、数1式により平均位置mが算出される。なお、数1式おいて、Piは、卵胞を構成するi番目の画素(ボクセル)についての三次元データ空間(図3参照)内における座標値であり、特定された卵胞を構成するi=1〜Nまでの全ての画素(ボクセル)の座標値が利用されて、平均位置(重心位置)mが算出される。
【0049】
【数1】
【0050】
そして、数1式の平均位置mを用いて、数2式に示す共分散行列Cが算出される。なお数2式に示す共分散行列Cは3×3の行列であり、数3式に示す6つの独立成分を持った対称行列となる。
【0051】
【数2】
【0052】
【数3】
【0053】
共分散行列Cを用いた主成分分析では、数2,3式により得られる共分散行列Cの固有ベクトルが算出され、最大の固有値に対応した固有ベクトルが第1主成分とされる。本実施形態においては、共分散行列Cを利用して得られる第1主成分の方向を卵胞の長軸とする。これにより、卵胞の重心を通り卵胞の長手方向に沿った長軸が特定される。さらに、共分散行列Cを利用して得られる第2主成分と第3主成分のそれぞれの方向を卵胞の2つの短軸とする。例えば、第2主成分の方向が短軸1とされ、第3主成分の方向が短軸2とされる。こうして、卵胞の3軸として、長軸とそれに直交する2つの短軸が特定される。
【0054】
なお、卵胞の画像データ内において、重心とそれから最も遠い画素とを結ぶ直線に沿って長軸を設定してもよいが、最も遠い画素がノイズ等である場合も考えられるため、主成分分析による長軸の設定の方が望ましい。
【0055】
3軸演算部30により3軸が特定されると、診断座標系設定部40は、卵胞の形態を基準とした診断座標系を設定する。診断座標系設定部40は、卵胞の3軸を座標軸とする診断座標系を設定する。
【0056】
図6は、卵胞を基準とした診断座標系を示す図である。診断座標系設定部40は、卵胞Fの重心Gの位置を座標原点とし、第1主成分の方向つまり卵胞Fの長軸の方向である第1軸と、第2主成分の方向つまり卵胞Fの一方の短軸の方向である第2軸と、第3主成分の方向つまり卵胞Fの他方の短軸の方向である第3軸と、を座標軸とする図6に示す直交座標系を診断座標系とする。
【0057】
図1に戻り、診断座標系設定部40により診断座標系が設定されると、座標系整合部50は、表示画像の基準となる表示座標系と診断座標系とを互いに整合させて、表示座標系に卵胞の画像データを配置する。
【0058】
図7は、表示座標系と診断座標系の整合を説明するための図である。図7において、表示座標系は、XYZ直交座標系で示されている。表示座標系は、表示画像を形成する際の基準となる座標系であり、三次元データ空間(図3参照)に対する相対的な位置関係が明らかな座標系である。本実施形態では、三次元データ空間(図3参照)のXYZ直交座標系をそのまま表示座標系とする。
【0059】
また、図7において、診断座標系は、第1軸と第2軸と第3軸(図6参照)により特定される座標系である。診断座標系の第1軸から第3軸は、三次元データ空間内における各画素(ボクセル)の座標に基づいて、主成分分析により例えば数1式から数3式を利用して得られる軸であり、三次元データ空間内における位置や方向が特定されている。したがって、三次元データ空間のXYZ直交座標系を表示座標系とすると、その表示座標系に対する診断座標系の位置や方向が特定されている。
【0060】
図7の(A)は、表示座標系(XYZ軸)上に特定された卵胞Fに関する診断座標系(第1軸から第3軸)の一例を示している。診断座標系は卵胞Fの長軸や短軸を基準とした座標系であるため、表示座標系内における卵胞Fの位置や向きに応じたものとなる。
【0061】
そこで、座標系整合部50は、まず、表示座標系に対して診断座標系を平行移動させて表示座標系の原点と診断座標系の原点を一致させる。もちろん、卵胞Fに関するボクセルデータ(画像データ)も診断座標系と共に平行移動される。
【0062】
図7の(B)は、診断座標系が平行移動された状態を示しており、表示座標系の原点の位置に診断座標系の原点が移動され、これにより、診断座標系の原点である卵胞Fの重心位置が表示座標系の原点に移動される。
【0063】
次に、座標系整合部50は、卵胞Fの長軸に対応した軸つまり診断座標系の第1軸と、表示座標系のXYZ軸の各々とを比較し、XYZ軸のうち第1軸との間の角度が最も小さい軸を特定する。例えば、第1軸とXYZ軸の各々との内積を比較して第1軸との間の角度が最も小さい軸を特定する。そして、特定された軸と第1軸が重なるように診断座標系が回転移動される。例えば、第1軸との間の角度が最も小さい軸としてX軸が特定された場合には、図7の(C)に示すように、X軸上に第1軸が重なるように診断座標系が回転され、卵胞Fの画像データも回転される。
【0064】
さらに、座標系整合部50は、卵胞Fの短軸に対応した診断座標系の第2軸と、表示座標系のうちの残りの軸とを比較し、第2軸との間の角度が最も小さい軸を特定する。例えば、第1軸とX軸とが重ね合わされた場合には、残りのY軸とZ軸のうち、第2軸との間の角度が最も小さい軸が特定される。そして、特定された軸と第2軸が重なるように診断座標系が回転移動される。例えば、第2軸との間の角度が最も小さい軸としてZ軸が特定された場合には、図7の(D)に示すように、Z軸上に第2軸が重なるように診断座標系が回転され、卵胞Fの画像データも回転される。
【0065】
なお、診断座標系が直交座標系であれば第1軸と第2軸がX軸とZ軸に重ね合わされることにより、第3軸がY軸に沿って配置される。図7の(D)においては、第3軸とY軸が互いに同じ向きに重ね合わされている。
図1に戻り、座標系整合部50により表示座標系と診断座標系が整合されて表示座標系に卵胞の画像データが配置されると、表示画像形成部60は、表示座標系に配置された卵胞の画像データに基づいて、その卵胞の表示画像を形成し、形成された表示画像が表示部70に表示される。その表示画像の形成においては、表示座標系を基準とした断面による卵胞の断層画像が形成される。
【0066】
図8は、表示座標系を基準とした断面を説明するための図である。図8には、図7(D)に示した表示座標系と診断座標系の整合により表示座標系に配置された卵胞Fの画像データが示されている。図8において、断面Aは、表示座標系のZ軸とX軸とを含んだ平面であり、断面Bは、表示座標系のY軸とZ軸とを含んだ平面であり、断面Cは、表示座標系のX軸とY軸とを含んだ平面である。
【0067】
図7(D)に示したように表示座標系と診断座標系が整合されているため、第1軸に対応した卵胞Fの長軸がX軸上に配置され、第2軸に対応した卵胞Fの短軸1がZ軸上に配置され、第3軸に対応した卵胞Fの短軸2がY軸上に配置されている。したがって図8において、断面Aは、卵胞Fの長軸と短軸1を含んだ断面となり、断面Bは、卵胞Fの短軸1と短軸2を含んだ断面となり、断面Cは、卵胞Fの長軸と短軸2を含んだ断面となる。
【0068】
図9は、表示画像62の具体例を示す図である。図9に示す表示画像62を構成する画像のうち、<3D>は、複数の卵胞に関する三次元画像である。この三次元画像は、三次元空間内から収集されたエコーデータ(ボクセルデータ)に基づいて、例えばボリュームレンダリング処理により形成される。そのボリュームレンダリング処理における視点の位置をユーザが変更できる構成とすることにより、所望の方向から複数の卵胞を映し出した三次元画像を得ることができる。
【0069】
例えば、図9に示す三次元画像内において、ユーザが、所望の方向から複数の卵胞を映し出し、さらに、カーソル等の表示態様を移動させ、その表示態様を所望の卵胞の位置に合わせることにより、ユーザが診断したい卵胞を選択することができる。これにより、例えば図9の三次元画像内において卵胞F1が特定される。なお、三次元画像内において、色などの表示態様やマーカなどにより、特定された卵胞を他の卵胞と視覚的に識別できるように表示してもよい。
【0070】
例えば、三次元画像を利用してユーザにより卵胞F1が特定されると、3軸演算部30により卵胞F1の3軸が特定され(図5,数1式から数3式参照)、診断座標系設定部40により卵胞F1の3軸に対応した診断座標系が設定され(図6参照)、さらに、座標系整合部50により表示座標系と診断座標系が整合される(図7参照)。そして、表示画像形成部60により断面AからC(図8参照)における卵胞F1の断層画像が形成される。
【0071】
図9において、表示画像62を構成する画像のうち、<断面A>は、卵胞F1についての断面Aにおける断層画像であり、<断面B>は、卵胞F1についての断面Bにおける断層画像であり、<断面C>は、卵胞F1についての断面Cにおける断層画像である。表示座標系と診断座標系が整合されているため、断面Aには、卵胞F1の長軸と短軸1を含んだ断面が表示され、断面Bには、卵胞F1の短軸1と短軸2を含んだ断面が表示され、断面Cには、卵胞F1の長軸と短軸2を含んだ断面が表示される。
【0072】
このように、本実施形態においては、複数の卵胞の中からユーザが所望の卵胞を特定することにより、その特定された卵胞の3軸を含んだ断層画像が形成される。そのため、例えば、ユーザによる切断面の設定などのための煩雑な操作を低減することができ、望ましくは切断面の設定のための操作を省略することが可能になる。
【0073】
また、表示座標系と診断座標系の整合において、交差角度が最小となる座標軸同士を重ね合わせることにより、診断座標系の回転移動を極力小さくすることができ、その回転移動によりユーザが感じる視覚的な違和感を極力抑えることができる。
【0074】
なお、特定された卵胞F1について、長軸の長さや2つの短軸の長さや体積などの計測値が表示画像62の一部として表示されてもよい。また、複数の卵胞が互いに分離されて特定されているため(図2参照)、各卵胞について長軸の長さや2つの短軸の長さや体積などの計測値を算出し、複数の卵胞に関する計測値の一覧を表示するようにしてもよい。さらに、これら計測値の一覧の中からユーザが所望の卵胞を特定し、これにより特定された卵胞の断面が表示されてもよい。
【0075】
以上、本発明の好適な実施形態である超音波診断装置について説明したが、例えば、図1に示した対象特定部20と3軸演算部30と診断座標系設定部40と座標系整合部50と表示画像形成部60のうちの少なくとも一つをコンピュータにより実現し、そのコンピュータを超音波画像処理装置として機能させてもよい。
【0076】
なお、上述した実施形態は、あらゆる点で単なる例示にすぎず、本発明の範囲を限定するものではない。本発明は、その本質を逸脱しない範囲で各種の変形形態を包含する。
【符号の説明】
【0077】
10 プローブ、20 対象特定部、30 3軸演算部、40 診断座標系設定部、50 座標系整合部、60 表示画像形成部、70 表示部。
【特許請求の範囲】
【請求項1】
診断領域に対して超音波を送受するプローブと、
プローブを制御することにより診断領域から受信信号を得る送受信部と、
受信信号に基づいて形成される診断領域の画像データ内において診断対象の画像データを特定する対象特定部と、
診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、
表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、
表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、
を有する、
ことを特徴とする超音波診断装置。
【請求項2】
請求項1に記載の超音波診断装置において、
前記座標系設定部は、診断対象の形態に応じて特定される基準軸を座標軸に含んだ診断座標系を設定し、
前記座標系整合部は、表示座標系の一つの座標軸と前記基準軸とを互いに重ね合わせることにより、表示座標系と診断座標系とを互いに整合させる、
ことを特徴とする超音波診断装置。
【請求項3】
請求項2に記載の超音波診断装置において、
前記座標系設定部は、診断対象の長手方向に沿って特定される長軸を座標軸に含んだ診断座標系を設定し、
前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせる、
ことを特徴とする超音波診断装置。
【請求項4】
請求項3に記載の超音波診断装置において、
前記座標系設定部は、診断対象の長軸に加えて長軸に直交する短軸を座標軸に含んだ診断座標系を設定し、
前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせ、表示座標系の他の座標軸と前記短軸とを互いに重ね合わせる、
ことを特徴とする超音波診断装置。
【請求項5】
請求項3または4に記載の超音波診断装置において、
前記座標系整合部は、表示座標系の複数の座標軸のうち前記長軸との間の角度が最も小さい座標軸と前記長軸とを互いに重ね合わせる、
ことを特徴とする超音波診断装置。
【請求項6】
請求項1から5のいずれか1項に記載の超音波診断装置において、
前記座標系設定部は、診断対象の画像データに基づいた主成分分析により得られる診断対象の長軸と短軸を座標軸とする診断座標系を設定する、
ことを特徴とする超音波診断装置。
【請求項7】
超音波の画像データ内において診断対象の画像データを特定する対象特定部と、
診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、
表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、
表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、
を有する、
ことを特徴とする超音波画像処理装置。
【請求項1】
診断領域に対して超音波を送受するプローブと、
プローブを制御することにより診断領域から受信信号を得る送受信部と、
受信信号に基づいて形成される診断領域の画像データ内において診断対象の画像データを特定する対象特定部と、
診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、
表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、
表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、
を有する、
ことを特徴とする超音波診断装置。
【請求項2】
請求項1に記載の超音波診断装置において、
前記座標系設定部は、診断対象の形態に応じて特定される基準軸を座標軸に含んだ診断座標系を設定し、
前記座標系整合部は、表示座標系の一つの座標軸と前記基準軸とを互いに重ね合わせることにより、表示座標系と診断座標系とを互いに整合させる、
ことを特徴とする超音波診断装置。
【請求項3】
請求項2に記載の超音波診断装置において、
前記座標系設定部は、診断対象の長手方向に沿って特定される長軸を座標軸に含んだ診断座標系を設定し、
前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせる、
ことを特徴とする超音波診断装置。
【請求項4】
請求項3に記載の超音波診断装置において、
前記座標系設定部は、診断対象の長軸に加えて長軸に直交する短軸を座標軸に含んだ診断座標系を設定し、
前記座標系整合部は、表示座標系の一つの座標軸と前記長軸とを互いに重ね合わせ、表示座標系の他の座標軸と前記短軸とを互いに重ね合わせる、
ことを特徴とする超音波診断装置。
【請求項5】
請求項3または4に記載の超音波診断装置において、
前記座標系整合部は、表示座標系の複数の座標軸のうち前記長軸との間の角度が最も小さい座標軸と前記長軸とを互いに重ね合わせる、
ことを特徴とする超音波診断装置。
【請求項6】
請求項1から5のいずれか1項に記載の超音波診断装置において、
前記座標系設定部は、診断対象の画像データに基づいた主成分分析により得られる診断対象の長軸と短軸を座標軸とする診断座標系を設定する、
ことを特徴とする超音波診断装置。
【請求項7】
超音波の画像データ内において診断対象の画像データを特定する対象特定部と、
診断対象の画像データに基づいて診断対象の形態を基準とした診断座標系を設定する座標系設定部と、
表示画像の基準となる表示座標系と診断座標系とを互いに整合させて表示座標系に診断対象の画像データを配置する座標系整合部と、
表示座標系に配置された診断対象の画像データに基づいて診断対象の表示画像を形成する表示画像形成部と、
を有する、
ことを特徴とする超音波画像処理装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−217791(P2012−217791A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−89927(P2011−89927)
【出願日】平成23年4月14日(2011.4.14)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月14日(2011.4.14)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
[ Back to top ]