
超音波診断装置
【課題】画像の歪や空間分解能の低下を生じさせることなく、ハードウェア及びソフトウェア規模の拡大を最小限とする低コストの超音波診断装置を提供する。
【解決手段】実施形態の超音波診断装置は、機械的に回転可能な超音波振動子を回転させながら、超音波ビームを回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって繰り返し電子走査する超音波プローブと、複数のフレームデータを記憶するフレーム記憶部と、前記複数のフレームデータから、第1のフレームに対応する第1のフレームデータと、第1のフレームに隣接する第2のフレームに対応する第2のフレームデータを抽出し、第1のフレームデータの一部と、第2のフレームデータの一部とを合成して、前記1回の電子走査範囲をカバーする混合フレームデータを生成する合成部と、複数の前記混合フレームデータから3次元画像を生成する画像生成部と、を備える。
【解決手段】実施形態の超音波診断装置は、機械的に回転可能な超音波振動子を回転させながら、超音波ビームを回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって繰り返し電子走査する超音波プローブと、複数のフレームデータを記憶するフレーム記憶部と、前記複数のフレームデータから、第1のフレームに対応する第1のフレームデータと、第1のフレームに隣接する第2のフレームに対応する第2のフレームデータを抽出し、第1のフレームデータの一部と、第2のフレームデータの一部とを合成して、前記1回の電子走査範囲をカバーする混合フレームデータを生成する合成部と、複数の前記混合フレームデータから3次元画像を生成する画像生成部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、超音波診断装置に関する。
【背景技術】
【0002】
従来から、超音波振動子を機械的に回転させながら、セクタ走査、リニア走査、コンベックス走査等の電子走査を行って、3次元データを取得する超音波診断装置(電子走査/機械走査併用型の超音波診断装置)がある。この種の超音波診断装置の超音波プローブでは、例えばリニアアレイ状に配列された圧電素子からなる超音波振動子によってペンシルビーム形状の超音波ビームを形成し、この超音波ビームを、平面上の一方の端(A端)から他方の端(B端)に向かって送受信しながら順番に電子走査する。超音波ビームがB端に達するとA端に戻り、再びA端からB端に向かって送受信しながら電子走査し、このサイクルを繰り返す。A端からB端までの1回の電子走査はフレームと呼ばれる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
1フレーム内において、超音波プローブ内の超音波振動子は、超音波ビームをA端からB端に向けて直線的に電子走査する。しかしながら、超音波振動子は機械的に回転しながら電子走査を行うため、3次元空間上での実際の超音波ビームの位置は、1フレーム内においても直線的に配列されず、機械的な回転角に応じて曲線的に変位する。このため、3次元画像上に歪が生じる。
【0004】
また、超音波振動子を半周だけ回転させた後、回転方向を逆転させて半周回転させるというシーケンスを繰り返す超音波プローブでは、回転方向の逆転時にビーム配置に疎密が生じたり、データ抜けが生じたりする場合がある。
【0005】
そこで、これらの課題を、ハードウェア/ソフトウェア規模をそれ程増大することなく解決できる超音波診断装置が求められている。
【課題を解決するための手段】
【0006】
実施形態の超音波診断装置は、機械的に回転可能な超音波振動子を具備し、前記超音波振動子を回転させながら、超音波ビームを回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって繰り返し電子走査する超音波プローブと、前記一方の端から前記他方の端までの1回の電子走査をフレームとし、前記フレーム内の受信データをフレームデータとするとき、複数の前記フレームデータを記憶するフレーム記憶部と、前記フレーム記憶部に記憶される複数のフレームデータから、第1のフレームに対応する第1のフレームデータと、前記第1のフレームに隣接する第2のフレームに対応する第2のフレームデータを抽出し、前記第1のフレームデータの一部と、前記第2のフレームデータの一部とを合成して、前記1回の電子走査範囲をカバーする混合フレームデータを生成する合成部と、複数の前記混合フレームデータから3次元画像を生成する画像生成部と、を備えたことを特徴とする。
【図面の簡単な説明】
【0007】
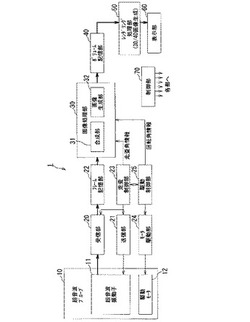
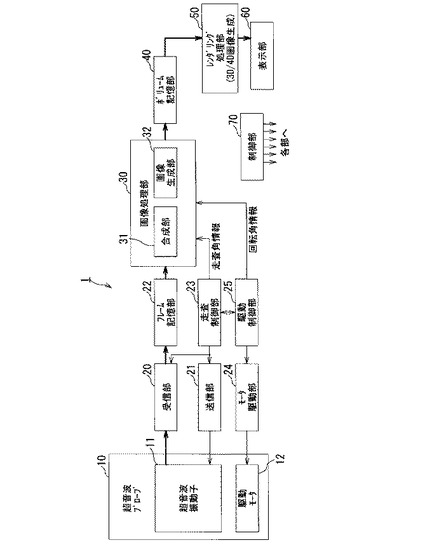
【図1】実施形態の超音波診断装置の構成例を示すブロック図。
【図2】超音波プローブのビーム走査とフレームデータとの関係を説明する図。
【図3】回転軸を中心とする投射面での、超音波振動子の回転角度とフレームとの関係を模式的に示す図。
【図4】実際のフレーム内でのビーム走査状況を示す図。
【図5】従来の3次元画像生成方法を示す図。
【図6】第1の実施形態の説明図。
【図7】第2の実施形態の説明図。
【図8】第3の実施形態の説明図。
【図9】第4の実施形態の説明図。
【図10】第5の実施形態の説明図。
【図11】回転方向が異なったときの画像のずれ現象を説明する図。
【図12】第6の実施形態の説明図。
【図13】第6の実施形態の変形例の説明図。
【発明を実施するための形態】
【0008】
以下、実施形態の超音波診断装置1を、添付図面を参照して説明する。
【0009】
(構成)
図1は、超音波診断装置1の構成例を示すブロック図である。超音波診断装置1は、超音波プローブ10、受信部20、送信部21、フレーム記憶部22、走査制御部23、モータ駆動部24、駆動制御部25、画像処理部30、ボリューム記憶部40、レンダリング処理部50、表示部60、制御部70等を備えて構成される。
【0010】
超音波プローブ10は、圧電素子等が例えばリニアアレイ状に配列された超音波振動子11と、超音波振動子11を機械的に回転させる駆動モータ12を有している。超音波振動子11は、送信部21から出力される電気信号による送信信号を超音波信号に変換し、被検体に送信すると共に、被検体からのエコー信号を受信して電気信号に変換する。駆動モータ12は、モータ駆動部24から出力されるモータ駆動信号にしたがって超音波振動子11を機械的に回転させる。
【0011】
送信部21は、走査制御部23から出力されるパルス繰り返し数や送信位置情報に基づいて、所望の超音波が超音波振動子11から送信されるように超音波振動子11を駆動する。
【0012】
受信部20は、超音波振動子11から出力される受信信号から、走査制御部23から与えられる受信位置情報等の条件に基づいてビームデータを生成する。受信部20は、さらに1フレーム内の複数のビームデータをまとめて1つのフレームデータとし、このフレームデータをフレーム記憶部22に一時的に保存する。フレーム記憶部22は、複数のフレームデータが記憶できるように構成される。
【0013】
モータ駆動部24は、駆動制御部25から与えられるモータ駆動情報等に基づいてモータ駆動信号を生成し、モータ駆動信号を駆動モータ12に出力する。
【0014】
駆動制御部25は、制御部70から指示された回転方向、回転速度、或いは回転位置等に応じてモータ駆動部24にモータ駆動情報等を出力する。また、モータ駆動部24から超音波振動子11の回転角情報を取得し、画像処理部30に出力する。
【0015】
走査制御部23は、制御部70から指示されたビーム数やフレーム数、フレームレート等に応じて、送信部21や受信部20に、パルス繰り返し周波数や送受信位置情報等を提供する。走査制御部23から出力する送受信位置情報に基づいて、超音波振動子11の超音波ビームの電子走査が行われる。
【0016】
画像処理部30の合成部31は、フレーム記憶部に記憶された複数のフレームデータから、基本的には2つのフレームデータを抽出し、それぞれの一部を合成して混合フレームデータを生成する。具体的な合成方法については後述する。
【0017】
画像処理部30の画像生成部32は、混合フレームデータと、駆動制御部25から出力される回転角情報とを関連付けて3次元空間に配置することにより、3次元画像データ、即ちボリュームデータを生成し、ボリューム記憶部40に格納する。
【0018】
レンダリング処理部50は、ボリューム記憶部40から3次元画像データを読み出し、表示用の各種レンダリング処理を行って表示部60へ表示用画像を出力する。また、時々刻々と生成される3次元画像を動画として、即ち4D画像として、表示部60へ出力する機能も有する。
【0019】
制御部70は、CPU等を備えて構成され、各部の制御を行うほか、図示しない操作卓等から入力される操作者の指示情報を各部へ伝える機能も有する。
【0020】
(ビーム走査とフレームデータ)
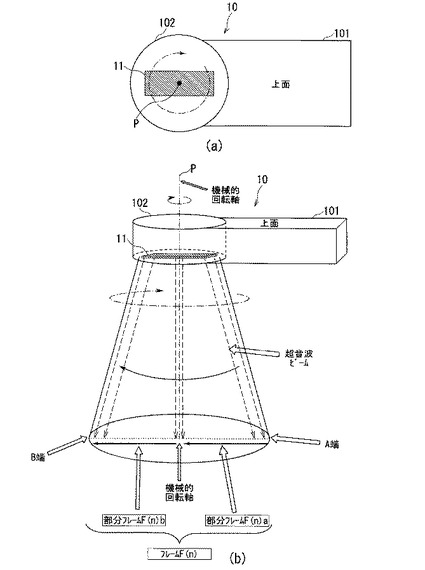
図2(a)は、超音波診断装置1の超音波プローブ10の構成を概念的に示す図である。超音波プローブ10は、図2(a)の構成、形状に限定されるものではないが、例えば基部101、と振動子収納部102を有しており、超音波振動子11は振動子収納部102に収納される。超音波振動子11は回転軸P回りを、駆動モータ12によって機械的に回転する。
【0021】
図2(b)は、本実施形態に係る超音波診断装置1のビーム走査とフレームデータを説明する図である。超音波振動子11から送受信される超音波ビームは、図2(b)において下方にある被検体の方向に向かうように形成される。超音波振動子11は、例えばリニアアレイ状に配列された多数の圧電素子を有して構成されており、超音波ビームは、アレイの配列方向に沿った走査平面を電子走査する。
【0022】
この走査平面は、超音波振動子11の機械的な回転軸Pに平行でかつ回転軸Pを含む平面である。図2(b)に示すように、超音波ビームは、走査平面の一方の端(A端)から回転軸Pを通って走査平面の他方の端(B端)に向かって電子走査される。超音波ビームがB端に達すると再びA端に戻り、A端からB端までの電子走査を繰り返す。この電子走査は、超音波振動子11を回転させながら行う。通常、A端とB端の位置は回転軸Pに対して対称となるように電子走査されるため、以下その前提で説明するが、必ずしも対称である必要はない。
【0023】
A端からB端までの1回の電子走査をフレームと呼び、フレームF(n)で表記するものとする。ここで、nはフレーム番号を表す。また、フレームF(n)を、A端から回転軸Pまでの領域と、回転軸PからB端までの領域に分割し、A端から回転軸Pまでを部分フレームF(n)aと呼び、回転軸PからB端までを部分フレームF(n)bと呼ぶものとする。
【0024】
前述したように、電子走査は超音波振動子11を回転させながら繰り返し行われる。回転方向は、超音波プローブ10の上方から見て、CW(時計回り)方向、CCW(反時計回り)方向のいずれでも良い。また、回転は連続的に行っても良いし、停止と回転を繰り返すようにしてもよい。停止と回転を繰り返す場合、停止した状態からCW方向(或いはCCW方向)に半周回転して一端停止し、その後逆方向のCCW方向(或いはCW方向)に回転して停止するというシーケンスを繰り返す。電子走査は回転軸Pを中心にして行われるため、超音波振動子11の半周の回転によって、超音波プローブ10の上方から見た投射面は回転軸Pを中心とした360度の範囲をカバーすることができる。
【0025】
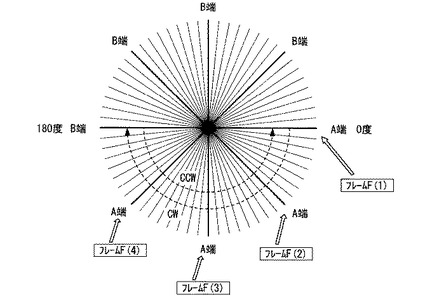
図3は、回転軸Pを中心とする投射面での、超音波振動子11の回転角度とフレームとの関係を模式的に示す図である。図3では、説明を判りやすくするため、360度の範囲(以下、全空間と呼ぶ場合がある)におけるフレームの数を極端に少なくしており、図3の例では、フレーム数を4としている。つまり、4つのフレームF(1)、F(2)、F(3)、F(4)によって360度の範囲をカバーしている。以下、この4つのフレームの例によって、本実施形態に係る3次元画像生成方法について説明する。また、以下の説明では、超音波振動子11は、特に明示しない場合は、図3におけるCW方向を0度から180度までの間回転しながら電子走査を行うものとして説明する。
【0026】
(第1の実施形態)
第1の実施形態に係る超音波診断装置1の3次元画像生成方法をより判りやすくするため、まず従来の3次元画像生成方法とその課題について説明する。
【0027】
図3に太い直線で示したフレームF(1)〜F(4)は、超音波振動子11が停止中にA端からB端までの電子走査を行い、その後超音波振動子11が隣のフレームに瞬時に回転移動し、そこでまた停止してA端からB端までの電子走査を行うという、現実にはあり得ない理想的なフレームを示している。
【0028】
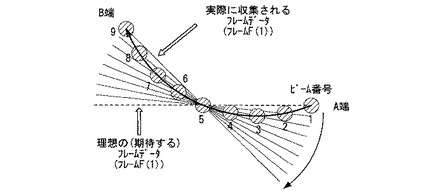
一方、図4は、実際のフレーム内でのビーム走査状況を示す図である。超音波振動子11は機械的に回転しながら電子走査を行っているため、A端からB端へ至る途中の超音波ビームは、図中のビーム番号1〜9で示したように、直線上ではなく曲線上の位置に指向されることになる。
【0029】
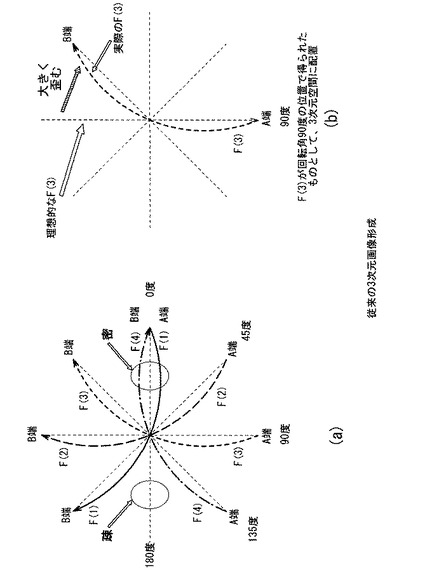
図5(a)、(b)は、従来の3次元画像生成方法を示す図である。従来の方法では、1つのフレーム期間中の各ビーム位置から得られる受信データ(以下、フレームデータと呼ぶ)の総てが、理想的なフレーム、即ち、フレームの開始位置(A端)と回転軸Pを結ぶ直線上から得られるものとして、3次元空間に配置していた。このため、例えばフレームF(3)を例にとると、図5(b)に示すように、実際のフレームF(3)で超音波ビームが指向する位置と、3次元空間に配置する位置(理想的なフレームF(3))とが異なり、画像上での歪が発生する。この歪は、A端から回転軸Pまでの間は比較的小さく回転軸P上ではゼロになるものの、回転軸PからB端に向かう領域では大きくなり、B端の近傍では非常に大きくなる(第1の課題)。
【0030】
この歪は、超音波振動子11の回転速度を下げることによってある程度低減することが出来るが、超音波振動子11の回転速度を下げることは、3次元空間全体のデータ(ボリュームデータ)を取得する時間が延びることになり、1つのボリュームデータの取得速度(ボリュームレート)が低下する。このため、3次元データをリアルタイムの動画として表示させる動作モード(4Dモード)には適さない。
【0031】
また、フレームデータを3次元空間に配置するとき、超音波ビームごとに、その位置を超音波振動子11の時々刻々の回転角度情報を用いて補正する方法も原理的には可能である。この補正方法によって、3次元画像上の歪をほぼ完全に排除する、或いは大幅に低減することができる。しかしながら、この補正方法を実現するには、ハードウェア規模やソフトウェア規模を拡大する必要があり、装置のコストアップとなる。
【0032】
他方、図5(a)から判るように、CW方向とCCW方向の回転を0度と180度の位置で半周ごとに切り換える場合、0度方向のフレームデータは密になるものの、180度方向のフレームデータは疎になってデータ抜けが生じる(第2の課題)。この課題は、超音波振動子11を連続的に同一方向に回転させることで解決できるが、この場合、超音波振動子11(回転部)と固定部との間に信号線や電力線を接続するためのスリップリング等の特別な機構が必要となり、超音波プローブ10の大型化やコストアップをもたらす。
【0033】
以下に示す第1の実施形態は、上述した第1の課題の解決を図るものである。第1の実施形態では、フレーム記憶部22に記憶されたフレームデータから隣接する2つのフレームデータ(第1のフレームデータと第2のフレームデータ)を抽出し、第1のフレームデータの一部と第2のフレームデータの一部とを合成して、1回の電子走査(1つのフレーム)の範囲をカバーする混合フレームを生成する。
【0034】
具体的には、第1のフレームデータF(n)のうちのA端から回転軸Pまでの範囲のデータを第1の部分フレームデータF(n)aとし、第2のフレームデータF(n−1)のうちの回転軸PからB端までの範囲を第2の部分フレームデータF(n−1)bとするとき、混合フレームデータF’(n)を次の(式1)によって合成する。(式1)の合成処理は、画像処理部30の合成部31が行う。
【0035】
F’(n)=F(n)a+F(n−1)b (式1)
ここで、第1のフレームデータF(n)は、第2のフレームデータF(n−1)の直後または直前に得られるフレームデータである。また、符号a、bは、A端から回転軸Pまでのフレームデータ(前半のフレームデータ)と、回転軸PからB端までのフレームデータ(後半のフレームデータ)とをそれぞれ識別する符号である。また、nはフレーム番号を表し、ボリューム当たりのフレーム数をNとすると、nは1以上N以下の整数となる。図3におけるA端が0度の位置が例えばフレーム番号1に該当し、CW方向の角度増加に伴ってフレーム番号は大きくなる。
【0036】
画像処理部30の画像生成部31は、混合フレームデータF’(n)が、第1のフレームF(n)の電子走査が開始されたときの回転軸方向から得られたものとして、3次元空間に配置する。或いは、予めフレーム番号nと回転角度とを関連付けておき、フレーム番号nに関連付けられた回転角度に混合フレームデータF’(n)を配置することで3次元画像を生成してもよい。
【0037】
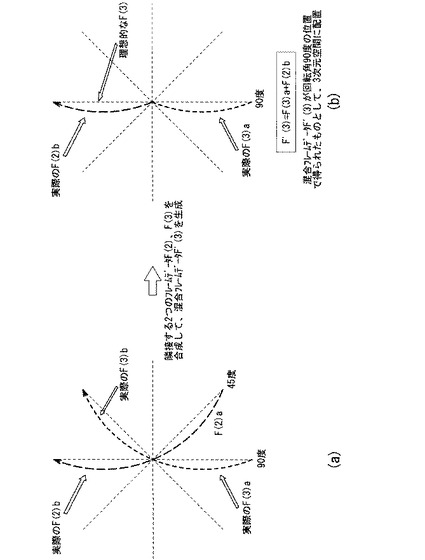
図6(a)、(b)は、第1のフレームデータF(n)としてF(3)を、第2のフレームデータF(n−1)としてF(2)を例とした、第1の実施形態の説明図である。この場合、混合フレームデータF’(3)は、図6(b)に示すように、F’(3)=F(3)a+F(2)b、となる。この混合フレームデータF’(3)が、第1のフレームF(3)の電子走査が開始されときの回転角90度の位置から得られたものとして3次元空間に配置される。
【0038】
従来の方法の図5(b)と比較すればわかるように、第1の実施形態による混合フレームデータF’(3)は、理想的なフレームデータF(3)により近づいており、画像の歪が低減されている。
【0039】
第1の実施形態によれば、ボリュームレートの低下や、ハードウェア、ソフトウェア規模の増大をもたらすことなく、隣接する2つのフレームデータの夫々の一部を抽出して合成するという簡素な処理によって画像の歪を低減することが可能となる。
【0040】
なお、超音波振動子11の回転方向が図3等におけるCCW方向の場合は、(式1)における第2のフレームデータはF(n−1)に代えて、F(n+1)となる。また、第1のフレームデータが第2のフレームデータの直後となるか直前となるかは、フレーム内の電子走査の方向が図3におけるA端からB端の方向であるのか、B端からA端の方向であるのかに依存する。
【0041】
(第2の実施形態)
第2の実施形態は、第1の実施形態におけるフレームを回転軸Pの前後で2分割し、新たなフレームF’’(n’)を、大きさがフレームF(n)の半分で、フレーム数が2倍であると再定義する。そして、3次元空間に配置するフレームデータF’’(n’)を、次の(式2)、(式3)から求める。
【0042】
F”(n’)=F(n’)a (1≦n’≦Nの場合) (式2)
F”(n’)=F(n’−N−1)b (N+1≦n’≦2Nの場合) (式3)
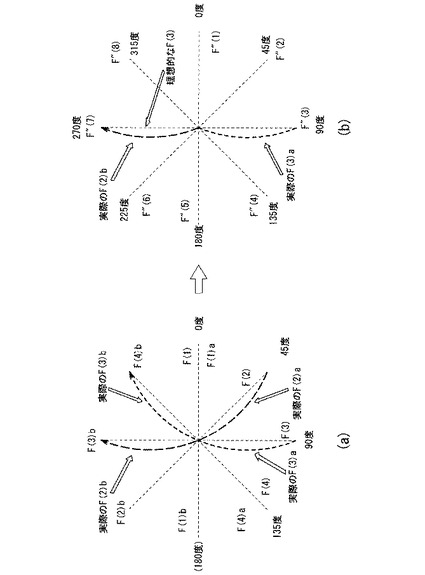
図7(a)、(b)の例で具体的に説明する。まず、角度0度にあるF(1)を、角度0度のF”(1)と角度180度にあるF”(5)へ、角度45度にあるF(2)を、角度45度のF”(2)と角度225度にあるF”(6)へ、角度90度にあるF(3)を、角度90度のF”(3)と角度270度にあるF”(7)へ、そして、角度135度にあるF(4)を、角度135度のF”(4)と角度315度にあるF”(8)へ、それぞれ再定義する。その後、(式2)、(式3)によって3次元空間に配置するフレームデータF’’(n’)を求める。再定義後のフレームF”(3)とF”(7)に着目すると、図7(b)に示すように、フレームデータF”(3)にはフレームデータF(3)aを使用し、フレームデータF”(7)にはフレームデータF(2)bを使用する。
【0043】
この結果、第1の実施形態と同様に、理想的なF(3)に近い、フレームデータF”(3)、F”(7)を得ることができる。
【0044】
第2の実施形態は、部分フレームデータF(n)a、F(n)bを合成することなく単独で取り扱うため、フレーム記憶部22からの読み出しの自由度が増し、フレーム記憶部22の容量を削減したり、或いはフレーム記憶部22そのものを不要にしたりすることが可能となる。
【0045】
(第3の実施形態)
第3の実施形態は、第1、第2の実施形態よりもさらに画像の歪を低減する手段を提供する。
【0046】
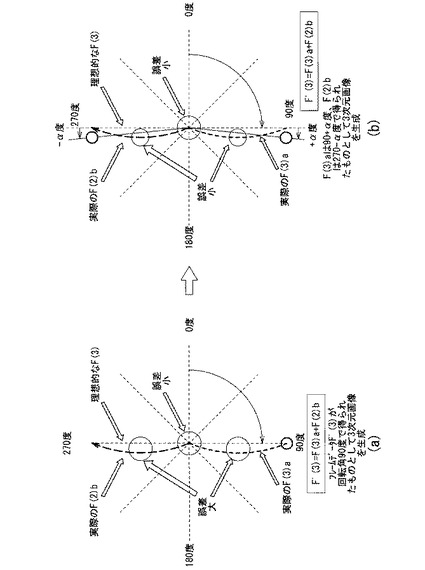
図8(a)に示すように、第1、2の実施形態では、A端とB端の近傍、及び回転軸Pの近傍では、誤差(歪)は小さくなるものの、A端と回転軸Pの中間部、或いは回転軸PとB端の中間部での誤差(歪)は、必ずしも小さくない。一般に、A端やB端の近傍は被検体の関心領域の外延となるため、操作者の関心が低い領域となる。したがって、A端やB端の近傍よりも内側の領域の誤差を低減できれば、より好ましいものとなる。
【0047】
そこで、第3の実施形態では、第1の部分フレームデータは、第1のフレームの電子走査が開始されたときより所定量α度だけ回転量を補正した機械的回転軸方向から得られたものとして、また、第2の部分フレームデータは、第1のフレームの電子走査が開始されたときより所定量−α度だけ回転を補正した機械的回転軸方向から得られたものとして、第1、第2の部分フレームデータを3次元空間上に配置して、3次元画像を生成するものとしている。
【0048】
例えば、図8(b)に示すように、混合フレームデータF’(3)のうち、第1の部分フレームデータF(3)aは、混合フレームデータF’(3)に対応する角度90度よりもα度回転を進ませた角度、(90+α)度から得られたものとして3次元空間に配置する。また、混合フレームデータF’(3)のうち、第2の部分フレームデータF(2)bは、角度270度よりもα度回転を遅らせた角度、(270−α)度から得られたものとして3次元空間に配置する。このように、混合フレームデータF’(3)を配置するときの角度を補正することにより、A端やB端の近傍よりも内側の領域の誤差を低減することができる。
【0049】
補正量αは、超音波振動子11の回転速度とフレームレートから自動的に求めても良いし、操作者が手動で調節してもよい。また、補正量αの正負の符号は、超音波振動子11の回転の方向やフレーム内の電子走査の向きによって異なってくる。
【0050】
なお、第3の実施形態は、第1、第2の実施形態のうち、いずれに対しても組み合わせることが可能である。
【0051】
(第4の実施形態)
前述したように、図5(a)に示す従来の3次元画像生成方法では、CW方向とCCW方向の回転を0度と180度の位置で半周ごとに切り換える場合、0度方向のフレームデータは密になるものの、180度方向のフレームデータは疎になってデータ抜けが生じるという課題(第2の課題)があった。第4の実施形態は、この第2の課題を解決するものである。
【0052】
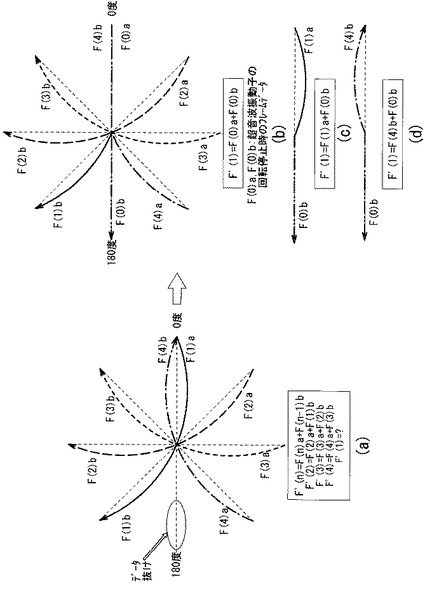
第1の実施形態では、混合フレームデータF’(n)を例えば(式1)の、F’(n)=F(n)a+F(n−1)b、によって合成するが、従来のビーム走査方法では、図9(a)に示すように、F’(1)に対しては、第2の部分フレームデータF(0)bが存在しない。
【0053】
そこで、第4の実施形態では、超音波振動子11が0度または180度で一時的に停止しているときにフレームデータF(0)(=F(0)a+F(0)b)を取得する。この停止中に取得したフレームデータF(0)a、F(0)bを用いて、図9(b)に示すように、混合フレームデータF’(1)を、F’(1)=F(0)a+F(0)b、から求めることにより、0度に関しては歪の全くない混合フレームデータとなる。
【0054】
この他、図9(c)に示すように、停止中の部分フレームデータF(0)bと回転開始直後の部分フレームデータF(1)aとを合成して、F’(1)=F(1)a+F(0)b、としてもよい。
【0055】
また、図9(d)に示すように、停止中の部分フレームデータF(0)bと回転停止直前の部分フレームデータF(4)bとを合成して、F’(1)=F(4)b+F(0)b、としてもよい。
【0056】
上述したように、第4の実施形態によれば、180度方向のデータの抜けを、停止中に取得したフレームデータの全部または一部を用いて補充することができる。なお、回転方向がCCWの場合には逆に0度方向にデータの抜けが発生することになるが、この場合にも、停止中に取得したフレームデータの全部または一部を用いることにより、0度方向のデータ抜けを補充することができる。
【0057】
第4の実施形態は、単独で実施しても良いが、第1乃至第3の実施形態と組み合わせてもよい。
【0058】
(第5の実施形態)
第5の実施形態は、第2の課題(特定の方向のデータ抜け)を、第4の実施形態とは異なる手法で解決するものである。
【0059】
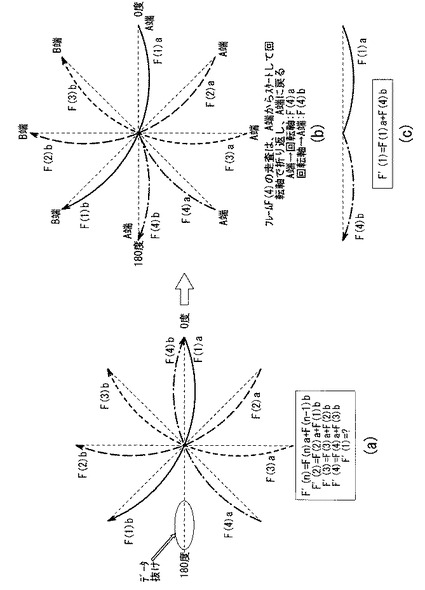
図10(a)は、図9(a)と同じ図であり、第1の実施形態を適用したとしても、F’(1)に対しては、第2の部分フレームデータF(0)bが存在しないため、180度方向にデータ抜けが発生することを示している。
【0060】
第5の実施形態では、回転停止直前のフレーム(例えば、図10(b)に示すCW回転の場合は、フレームF(4))、又は回転開始直後のフレームのみ例外的な電子走査を行い、A端から回転軸Pまで電子走査したのち回転軸PからA端まで折り返して電子走査する。一方、回転停止直前のフレーム以外のフレーム(フレームF(1)〜F(3))は、第1−第4の実施形態と同様に、A端からB端まで連続的に電子走査を行う。
【0061】
第5の実施形態では、混合フレームデータF’(1)は、図10(c)に示すように、フレームF(4)の折り返しの部分フレームデータF(4)bと、部分フレームデータF(1)aを合成して、F’(1)=F(1)a+F(4)bとして得られる。
【0062】
このように、第5の実施形態によれば、回転停止直前のフレームでの電子走査を回転軸Pで折り返し、折り返し時に得たデータにより180度方向のデータの抜けを補充することができる。なお、CCW回転時には、0度方向のデータに抜けが発生することになるが、この場合にも、回転停止直前のフレームでの電子走査を回転軸Pで折り返し、折り返し時に得たデータを用いることで0度方向のデータの抜けを補充することができる。
【0063】
第5の実施形態は、単独で実施しても良いが、第1乃至第3の実施形態と組み合わせてもよい。
【0064】
(第6の実施形態)
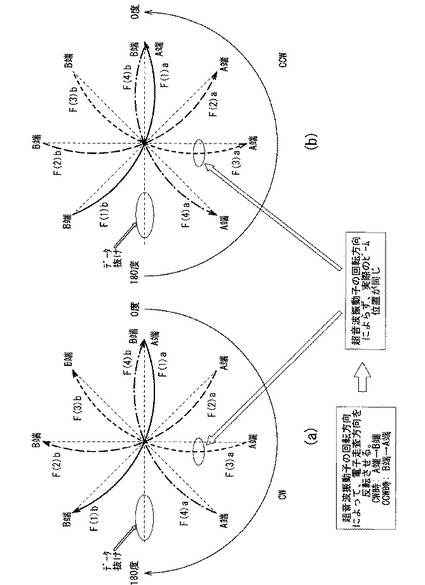
第6の実施形態では、超音波振動子11の回転方向を、0度と180度の位置でCW方向とCCW方向とに半周ごとに切り換える場合において、電子走査の方向を超音波振動子11の回転方向に応じて切り換えるものとしている。
【0065】
図11は、従来の3次元画像生成方法を示す図であり、CW方向(図11(a))、CCW方向(図11(b))のいずれの場合にも、A端からB端に向けて同じ方向に電子走査を行っている。この方法の場合、理想的な直線に対する歪の向き(凸となる方向)がCW方向とCCW方向とで逆向きとなっている。このため、取得した複数の3次元画像データを比較する場合や、4D表示のように動画として表示する場合に、CW方向とCCW方向とで画像がずれて表示されることになる(第3の課題)。
【0066】
第6の実施形態は、この第3の課題を解決するものであり、図12(a)、(b)に示すように、超音波振動子11の回転方向によって、超音波振動子11の電子走査の方向を反転させている。例えば、超音波振動子11をCW方向に回転させるときは、A端からB端に向けて電子走査し、CCW方向に回転させるときは、B端からにA端向けて電子走査する。この手法により、理想的な直線に対する歪の向きを同じ向きに揃えることが可能となり、CW方向とCCW方向とでの画像のずれを解消することができる。
【0067】
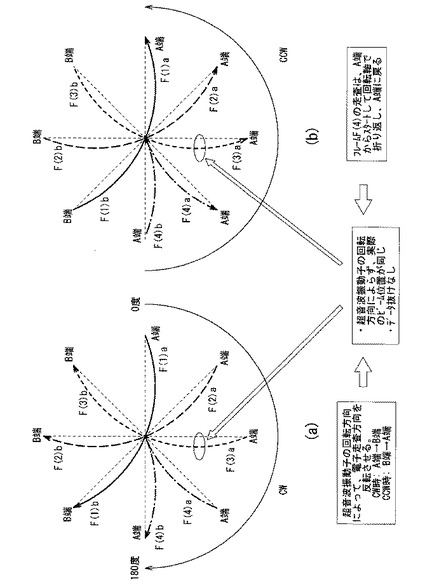
(第6の実施形態の変形例)
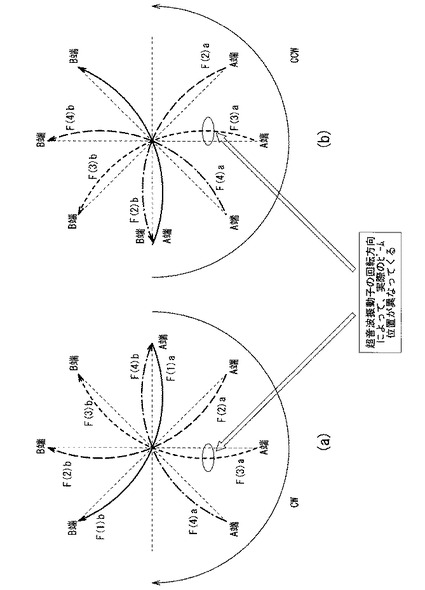
第6の実施形態によれば、CW方向とCCW方向とでの画像のずれを解消することができるものの、図12(a)、(b)から判るように、いずれも180度方向の領域にデータ抜けが生じている。第6の実施形態の変形例は、このデータ抜けを解消するために、第5の実施形態の手法を第6の実施形態に取り入れたものである。
【0068】
例えば、図13(a)に示すように、CW回転時は、回転停止直前のフレーム(フレームF(4))のみ例外的な電子走査を行い、A端から回転軸Pまで電子走査したのち回転軸PからA端まで折り返して電子走査する。一方、回転停止直前のフレーム以外のフレーム(フレームF(1)〜F(3))は、A端からB端まで連続的に電子走査を行う。これに対して、CCW回転時は、図13(b)に示すように、回転開始直後のフレーム(フレームF(4))のみ例外的な電子走査を行い、A端から回転軸Pまで電子走査したのち回転軸PからA端まで折り返して電子走査する。一方、回転開始直後のフレーム以外のフレーム(フレームF(1)〜F(3))は、CW回転時とは逆にB端からA端まで連続的に電子走査を行う。
【0069】
このような手法により、CW方向とCCW方向とでの画像のずれを解消すると共に、特定の方向(例えば180度方向)のデータ抜けを解消することができる。
【0070】
上述した各実施形態に係る超音波診断装置によれば、ハードウェア及びソフトウェア規模の拡大を最小限に抑制しつつ、画像の歪や空間分解能の低下を生じさせることのない3次元画像の表示や4D表示を行うことが出来る。
【0071】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0072】
1 超音波診断装置
10 超音波プローブ
11 超音波振動子
12 駆動モータ
22 フレーム記憶部
23 走査制御部
25 駆動制御部
30 画像処理部
31 合成部
32 画像生成部
70 制御部
【技術分野】
【0001】
本発明の実施形態は、超音波診断装置に関する。
【背景技術】
【0002】
従来から、超音波振動子を機械的に回転させながら、セクタ走査、リニア走査、コンベックス走査等の電子走査を行って、3次元データを取得する超音波診断装置(電子走査/機械走査併用型の超音波診断装置)がある。この種の超音波診断装置の超音波プローブでは、例えばリニアアレイ状に配列された圧電素子からなる超音波振動子によってペンシルビーム形状の超音波ビームを形成し、この超音波ビームを、平面上の一方の端(A端)から他方の端(B端)に向かって送受信しながら順番に電子走査する。超音波ビームがB端に達するとA端に戻り、再びA端からB端に向かって送受信しながら電子走査し、このサイクルを繰り返す。A端からB端までの1回の電子走査はフレームと呼ばれる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
1フレーム内において、超音波プローブ内の超音波振動子は、超音波ビームをA端からB端に向けて直線的に電子走査する。しかしながら、超音波振動子は機械的に回転しながら電子走査を行うため、3次元空間上での実際の超音波ビームの位置は、1フレーム内においても直線的に配列されず、機械的な回転角に応じて曲線的に変位する。このため、3次元画像上に歪が生じる。
【0004】
また、超音波振動子を半周だけ回転させた後、回転方向を逆転させて半周回転させるというシーケンスを繰り返す超音波プローブでは、回転方向の逆転時にビーム配置に疎密が生じたり、データ抜けが生じたりする場合がある。
【0005】
そこで、これらの課題を、ハードウェア/ソフトウェア規模をそれ程増大することなく解決できる超音波診断装置が求められている。
【課題を解決するための手段】
【0006】
実施形態の超音波診断装置は、機械的に回転可能な超音波振動子を具備し、前記超音波振動子を回転させながら、超音波ビームを回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって繰り返し電子走査する超音波プローブと、前記一方の端から前記他方の端までの1回の電子走査をフレームとし、前記フレーム内の受信データをフレームデータとするとき、複数の前記フレームデータを記憶するフレーム記憶部と、前記フレーム記憶部に記憶される複数のフレームデータから、第1のフレームに対応する第1のフレームデータと、前記第1のフレームに隣接する第2のフレームに対応する第2のフレームデータを抽出し、前記第1のフレームデータの一部と、前記第2のフレームデータの一部とを合成して、前記1回の電子走査範囲をカバーする混合フレームデータを生成する合成部と、複数の前記混合フレームデータから3次元画像を生成する画像生成部と、を備えたことを特徴とする。
【図面の簡単な説明】
【0007】
【図1】実施形態の超音波診断装置の構成例を示すブロック図。
【図2】超音波プローブのビーム走査とフレームデータとの関係を説明する図。
【図3】回転軸を中心とする投射面での、超音波振動子の回転角度とフレームとの関係を模式的に示す図。
【図4】実際のフレーム内でのビーム走査状況を示す図。
【図5】従来の3次元画像生成方法を示す図。
【図6】第1の実施形態の説明図。
【図7】第2の実施形態の説明図。
【図8】第3の実施形態の説明図。
【図9】第4の実施形態の説明図。
【図10】第5の実施形態の説明図。
【図11】回転方向が異なったときの画像のずれ現象を説明する図。
【図12】第6の実施形態の説明図。
【図13】第6の実施形態の変形例の説明図。
【発明を実施するための形態】
【0008】
以下、実施形態の超音波診断装置1を、添付図面を参照して説明する。
【0009】
(構成)
図1は、超音波診断装置1の構成例を示すブロック図である。超音波診断装置1は、超音波プローブ10、受信部20、送信部21、フレーム記憶部22、走査制御部23、モータ駆動部24、駆動制御部25、画像処理部30、ボリューム記憶部40、レンダリング処理部50、表示部60、制御部70等を備えて構成される。
【0010】
超音波プローブ10は、圧電素子等が例えばリニアアレイ状に配列された超音波振動子11と、超音波振動子11を機械的に回転させる駆動モータ12を有している。超音波振動子11は、送信部21から出力される電気信号による送信信号を超音波信号に変換し、被検体に送信すると共に、被検体からのエコー信号を受信して電気信号に変換する。駆動モータ12は、モータ駆動部24から出力されるモータ駆動信号にしたがって超音波振動子11を機械的に回転させる。
【0011】
送信部21は、走査制御部23から出力されるパルス繰り返し数や送信位置情報に基づいて、所望の超音波が超音波振動子11から送信されるように超音波振動子11を駆動する。
【0012】
受信部20は、超音波振動子11から出力される受信信号から、走査制御部23から与えられる受信位置情報等の条件に基づいてビームデータを生成する。受信部20は、さらに1フレーム内の複数のビームデータをまとめて1つのフレームデータとし、このフレームデータをフレーム記憶部22に一時的に保存する。フレーム記憶部22は、複数のフレームデータが記憶できるように構成される。
【0013】
モータ駆動部24は、駆動制御部25から与えられるモータ駆動情報等に基づいてモータ駆動信号を生成し、モータ駆動信号を駆動モータ12に出力する。
【0014】
駆動制御部25は、制御部70から指示された回転方向、回転速度、或いは回転位置等に応じてモータ駆動部24にモータ駆動情報等を出力する。また、モータ駆動部24から超音波振動子11の回転角情報を取得し、画像処理部30に出力する。
【0015】
走査制御部23は、制御部70から指示されたビーム数やフレーム数、フレームレート等に応じて、送信部21や受信部20に、パルス繰り返し周波数や送受信位置情報等を提供する。走査制御部23から出力する送受信位置情報に基づいて、超音波振動子11の超音波ビームの電子走査が行われる。
【0016】
画像処理部30の合成部31は、フレーム記憶部に記憶された複数のフレームデータから、基本的には2つのフレームデータを抽出し、それぞれの一部を合成して混合フレームデータを生成する。具体的な合成方法については後述する。
【0017】
画像処理部30の画像生成部32は、混合フレームデータと、駆動制御部25から出力される回転角情報とを関連付けて3次元空間に配置することにより、3次元画像データ、即ちボリュームデータを生成し、ボリューム記憶部40に格納する。
【0018】
レンダリング処理部50は、ボリューム記憶部40から3次元画像データを読み出し、表示用の各種レンダリング処理を行って表示部60へ表示用画像を出力する。また、時々刻々と生成される3次元画像を動画として、即ち4D画像として、表示部60へ出力する機能も有する。
【0019】
制御部70は、CPU等を備えて構成され、各部の制御を行うほか、図示しない操作卓等から入力される操作者の指示情報を各部へ伝える機能も有する。
【0020】
(ビーム走査とフレームデータ)
図2(a)は、超音波診断装置1の超音波プローブ10の構成を概念的に示す図である。超音波プローブ10は、図2(a)の構成、形状に限定されるものではないが、例えば基部101、と振動子収納部102を有しており、超音波振動子11は振動子収納部102に収納される。超音波振動子11は回転軸P回りを、駆動モータ12によって機械的に回転する。
【0021】
図2(b)は、本実施形態に係る超音波診断装置1のビーム走査とフレームデータを説明する図である。超音波振動子11から送受信される超音波ビームは、図2(b)において下方にある被検体の方向に向かうように形成される。超音波振動子11は、例えばリニアアレイ状に配列された多数の圧電素子を有して構成されており、超音波ビームは、アレイの配列方向に沿った走査平面を電子走査する。
【0022】
この走査平面は、超音波振動子11の機械的な回転軸Pに平行でかつ回転軸Pを含む平面である。図2(b)に示すように、超音波ビームは、走査平面の一方の端(A端)から回転軸Pを通って走査平面の他方の端(B端)に向かって電子走査される。超音波ビームがB端に達すると再びA端に戻り、A端からB端までの電子走査を繰り返す。この電子走査は、超音波振動子11を回転させながら行う。通常、A端とB端の位置は回転軸Pに対して対称となるように電子走査されるため、以下その前提で説明するが、必ずしも対称である必要はない。
【0023】
A端からB端までの1回の電子走査をフレームと呼び、フレームF(n)で表記するものとする。ここで、nはフレーム番号を表す。また、フレームF(n)を、A端から回転軸Pまでの領域と、回転軸PからB端までの領域に分割し、A端から回転軸Pまでを部分フレームF(n)aと呼び、回転軸PからB端までを部分フレームF(n)bと呼ぶものとする。
【0024】
前述したように、電子走査は超音波振動子11を回転させながら繰り返し行われる。回転方向は、超音波プローブ10の上方から見て、CW(時計回り)方向、CCW(反時計回り)方向のいずれでも良い。また、回転は連続的に行っても良いし、停止と回転を繰り返すようにしてもよい。停止と回転を繰り返す場合、停止した状態からCW方向(或いはCCW方向)に半周回転して一端停止し、その後逆方向のCCW方向(或いはCW方向)に回転して停止するというシーケンスを繰り返す。電子走査は回転軸Pを中心にして行われるため、超音波振動子11の半周の回転によって、超音波プローブ10の上方から見た投射面は回転軸Pを中心とした360度の範囲をカバーすることができる。
【0025】
図3は、回転軸Pを中心とする投射面での、超音波振動子11の回転角度とフレームとの関係を模式的に示す図である。図3では、説明を判りやすくするため、360度の範囲(以下、全空間と呼ぶ場合がある)におけるフレームの数を極端に少なくしており、図3の例では、フレーム数を4としている。つまり、4つのフレームF(1)、F(2)、F(3)、F(4)によって360度の範囲をカバーしている。以下、この4つのフレームの例によって、本実施形態に係る3次元画像生成方法について説明する。また、以下の説明では、超音波振動子11は、特に明示しない場合は、図3におけるCW方向を0度から180度までの間回転しながら電子走査を行うものとして説明する。
【0026】
(第1の実施形態)
第1の実施形態に係る超音波診断装置1の3次元画像生成方法をより判りやすくするため、まず従来の3次元画像生成方法とその課題について説明する。
【0027】
図3に太い直線で示したフレームF(1)〜F(4)は、超音波振動子11が停止中にA端からB端までの電子走査を行い、その後超音波振動子11が隣のフレームに瞬時に回転移動し、そこでまた停止してA端からB端までの電子走査を行うという、現実にはあり得ない理想的なフレームを示している。
【0028】
一方、図4は、実際のフレーム内でのビーム走査状況を示す図である。超音波振動子11は機械的に回転しながら電子走査を行っているため、A端からB端へ至る途中の超音波ビームは、図中のビーム番号1〜9で示したように、直線上ではなく曲線上の位置に指向されることになる。
【0029】
図5(a)、(b)は、従来の3次元画像生成方法を示す図である。従来の方法では、1つのフレーム期間中の各ビーム位置から得られる受信データ(以下、フレームデータと呼ぶ)の総てが、理想的なフレーム、即ち、フレームの開始位置(A端)と回転軸Pを結ぶ直線上から得られるものとして、3次元空間に配置していた。このため、例えばフレームF(3)を例にとると、図5(b)に示すように、実際のフレームF(3)で超音波ビームが指向する位置と、3次元空間に配置する位置(理想的なフレームF(3))とが異なり、画像上での歪が発生する。この歪は、A端から回転軸Pまでの間は比較的小さく回転軸P上ではゼロになるものの、回転軸PからB端に向かう領域では大きくなり、B端の近傍では非常に大きくなる(第1の課題)。
【0030】
この歪は、超音波振動子11の回転速度を下げることによってある程度低減することが出来るが、超音波振動子11の回転速度を下げることは、3次元空間全体のデータ(ボリュームデータ)を取得する時間が延びることになり、1つのボリュームデータの取得速度(ボリュームレート)が低下する。このため、3次元データをリアルタイムの動画として表示させる動作モード(4Dモード)には適さない。
【0031】
また、フレームデータを3次元空間に配置するとき、超音波ビームごとに、その位置を超音波振動子11の時々刻々の回転角度情報を用いて補正する方法も原理的には可能である。この補正方法によって、3次元画像上の歪をほぼ完全に排除する、或いは大幅に低減することができる。しかしながら、この補正方法を実現するには、ハードウェア規模やソフトウェア規模を拡大する必要があり、装置のコストアップとなる。
【0032】
他方、図5(a)から判るように、CW方向とCCW方向の回転を0度と180度の位置で半周ごとに切り換える場合、0度方向のフレームデータは密になるものの、180度方向のフレームデータは疎になってデータ抜けが生じる(第2の課題)。この課題は、超音波振動子11を連続的に同一方向に回転させることで解決できるが、この場合、超音波振動子11(回転部)と固定部との間に信号線や電力線を接続するためのスリップリング等の特別な機構が必要となり、超音波プローブ10の大型化やコストアップをもたらす。
【0033】
以下に示す第1の実施形態は、上述した第1の課題の解決を図るものである。第1の実施形態では、フレーム記憶部22に記憶されたフレームデータから隣接する2つのフレームデータ(第1のフレームデータと第2のフレームデータ)を抽出し、第1のフレームデータの一部と第2のフレームデータの一部とを合成して、1回の電子走査(1つのフレーム)の範囲をカバーする混合フレームを生成する。
【0034】
具体的には、第1のフレームデータF(n)のうちのA端から回転軸Pまでの範囲のデータを第1の部分フレームデータF(n)aとし、第2のフレームデータF(n−1)のうちの回転軸PからB端までの範囲を第2の部分フレームデータF(n−1)bとするとき、混合フレームデータF’(n)を次の(式1)によって合成する。(式1)の合成処理は、画像処理部30の合成部31が行う。
【0035】
F’(n)=F(n)a+F(n−1)b (式1)
ここで、第1のフレームデータF(n)は、第2のフレームデータF(n−1)の直後または直前に得られるフレームデータである。また、符号a、bは、A端から回転軸Pまでのフレームデータ(前半のフレームデータ)と、回転軸PからB端までのフレームデータ(後半のフレームデータ)とをそれぞれ識別する符号である。また、nはフレーム番号を表し、ボリューム当たりのフレーム数をNとすると、nは1以上N以下の整数となる。図3におけるA端が0度の位置が例えばフレーム番号1に該当し、CW方向の角度増加に伴ってフレーム番号は大きくなる。
【0036】
画像処理部30の画像生成部31は、混合フレームデータF’(n)が、第1のフレームF(n)の電子走査が開始されたときの回転軸方向から得られたものとして、3次元空間に配置する。或いは、予めフレーム番号nと回転角度とを関連付けておき、フレーム番号nに関連付けられた回転角度に混合フレームデータF’(n)を配置することで3次元画像を生成してもよい。
【0037】
図6(a)、(b)は、第1のフレームデータF(n)としてF(3)を、第2のフレームデータF(n−1)としてF(2)を例とした、第1の実施形態の説明図である。この場合、混合フレームデータF’(3)は、図6(b)に示すように、F’(3)=F(3)a+F(2)b、となる。この混合フレームデータF’(3)が、第1のフレームF(3)の電子走査が開始されときの回転角90度の位置から得られたものとして3次元空間に配置される。
【0038】
従来の方法の図5(b)と比較すればわかるように、第1の実施形態による混合フレームデータF’(3)は、理想的なフレームデータF(3)により近づいており、画像の歪が低減されている。
【0039】
第1の実施形態によれば、ボリュームレートの低下や、ハードウェア、ソフトウェア規模の増大をもたらすことなく、隣接する2つのフレームデータの夫々の一部を抽出して合成するという簡素な処理によって画像の歪を低減することが可能となる。
【0040】
なお、超音波振動子11の回転方向が図3等におけるCCW方向の場合は、(式1)における第2のフレームデータはF(n−1)に代えて、F(n+1)となる。また、第1のフレームデータが第2のフレームデータの直後となるか直前となるかは、フレーム内の電子走査の方向が図3におけるA端からB端の方向であるのか、B端からA端の方向であるのかに依存する。
【0041】
(第2の実施形態)
第2の実施形態は、第1の実施形態におけるフレームを回転軸Pの前後で2分割し、新たなフレームF’’(n’)を、大きさがフレームF(n)の半分で、フレーム数が2倍であると再定義する。そして、3次元空間に配置するフレームデータF’’(n’)を、次の(式2)、(式3)から求める。
【0042】
F”(n’)=F(n’)a (1≦n’≦Nの場合) (式2)
F”(n’)=F(n’−N−1)b (N+1≦n’≦2Nの場合) (式3)
図7(a)、(b)の例で具体的に説明する。まず、角度0度にあるF(1)を、角度0度のF”(1)と角度180度にあるF”(5)へ、角度45度にあるF(2)を、角度45度のF”(2)と角度225度にあるF”(6)へ、角度90度にあるF(3)を、角度90度のF”(3)と角度270度にあるF”(7)へ、そして、角度135度にあるF(4)を、角度135度のF”(4)と角度315度にあるF”(8)へ、それぞれ再定義する。その後、(式2)、(式3)によって3次元空間に配置するフレームデータF’’(n’)を求める。再定義後のフレームF”(3)とF”(7)に着目すると、図7(b)に示すように、フレームデータF”(3)にはフレームデータF(3)aを使用し、フレームデータF”(7)にはフレームデータF(2)bを使用する。
【0043】
この結果、第1の実施形態と同様に、理想的なF(3)に近い、フレームデータF”(3)、F”(7)を得ることができる。
【0044】
第2の実施形態は、部分フレームデータF(n)a、F(n)bを合成することなく単独で取り扱うため、フレーム記憶部22からの読み出しの自由度が増し、フレーム記憶部22の容量を削減したり、或いはフレーム記憶部22そのものを不要にしたりすることが可能となる。
【0045】
(第3の実施形態)
第3の実施形態は、第1、第2の実施形態よりもさらに画像の歪を低減する手段を提供する。
【0046】
図8(a)に示すように、第1、2の実施形態では、A端とB端の近傍、及び回転軸Pの近傍では、誤差(歪)は小さくなるものの、A端と回転軸Pの中間部、或いは回転軸PとB端の中間部での誤差(歪)は、必ずしも小さくない。一般に、A端やB端の近傍は被検体の関心領域の外延となるため、操作者の関心が低い領域となる。したがって、A端やB端の近傍よりも内側の領域の誤差を低減できれば、より好ましいものとなる。
【0047】
そこで、第3の実施形態では、第1の部分フレームデータは、第1のフレームの電子走査が開始されたときより所定量α度だけ回転量を補正した機械的回転軸方向から得られたものとして、また、第2の部分フレームデータは、第1のフレームの電子走査が開始されたときより所定量−α度だけ回転を補正した機械的回転軸方向から得られたものとして、第1、第2の部分フレームデータを3次元空間上に配置して、3次元画像を生成するものとしている。
【0048】
例えば、図8(b)に示すように、混合フレームデータF’(3)のうち、第1の部分フレームデータF(3)aは、混合フレームデータF’(3)に対応する角度90度よりもα度回転を進ませた角度、(90+α)度から得られたものとして3次元空間に配置する。また、混合フレームデータF’(3)のうち、第2の部分フレームデータF(2)bは、角度270度よりもα度回転を遅らせた角度、(270−α)度から得られたものとして3次元空間に配置する。このように、混合フレームデータF’(3)を配置するときの角度を補正することにより、A端やB端の近傍よりも内側の領域の誤差を低減することができる。
【0049】
補正量αは、超音波振動子11の回転速度とフレームレートから自動的に求めても良いし、操作者が手動で調節してもよい。また、補正量αの正負の符号は、超音波振動子11の回転の方向やフレーム内の電子走査の向きによって異なってくる。
【0050】
なお、第3の実施形態は、第1、第2の実施形態のうち、いずれに対しても組み合わせることが可能である。
【0051】
(第4の実施形態)
前述したように、図5(a)に示す従来の3次元画像生成方法では、CW方向とCCW方向の回転を0度と180度の位置で半周ごとに切り換える場合、0度方向のフレームデータは密になるものの、180度方向のフレームデータは疎になってデータ抜けが生じるという課題(第2の課題)があった。第4の実施形態は、この第2の課題を解決するものである。
【0052】
第1の実施形態では、混合フレームデータF’(n)を例えば(式1)の、F’(n)=F(n)a+F(n−1)b、によって合成するが、従来のビーム走査方法では、図9(a)に示すように、F’(1)に対しては、第2の部分フレームデータF(0)bが存在しない。
【0053】
そこで、第4の実施形態では、超音波振動子11が0度または180度で一時的に停止しているときにフレームデータF(0)(=F(0)a+F(0)b)を取得する。この停止中に取得したフレームデータF(0)a、F(0)bを用いて、図9(b)に示すように、混合フレームデータF’(1)を、F’(1)=F(0)a+F(0)b、から求めることにより、0度に関しては歪の全くない混合フレームデータとなる。
【0054】
この他、図9(c)に示すように、停止中の部分フレームデータF(0)bと回転開始直後の部分フレームデータF(1)aとを合成して、F’(1)=F(1)a+F(0)b、としてもよい。
【0055】
また、図9(d)に示すように、停止中の部分フレームデータF(0)bと回転停止直前の部分フレームデータF(4)bとを合成して、F’(1)=F(4)b+F(0)b、としてもよい。
【0056】
上述したように、第4の実施形態によれば、180度方向のデータの抜けを、停止中に取得したフレームデータの全部または一部を用いて補充することができる。なお、回転方向がCCWの場合には逆に0度方向にデータの抜けが発生することになるが、この場合にも、停止中に取得したフレームデータの全部または一部を用いることにより、0度方向のデータ抜けを補充することができる。
【0057】
第4の実施形態は、単独で実施しても良いが、第1乃至第3の実施形態と組み合わせてもよい。
【0058】
(第5の実施形態)
第5の実施形態は、第2の課題(特定の方向のデータ抜け)を、第4の実施形態とは異なる手法で解決するものである。
【0059】
図10(a)は、図9(a)と同じ図であり、第1の実施形態を適用したとしても、F’(1)に対しては、第2の部分フレームデータF(0)bが存在しないため、180度方向にデータ抜けが発生することを示している。
【0060】
第5の実施形態では、回転停止直前のフレーム(例えば、図10(b)に示すCW回転の場合は、フレームF(4))、又は回転開始直後のフレームのみ例外的な電子走査を行い、A端から回転軸Pまで電子走査したのち回転軸PからA端まで折り返して電子走査する。一方、回転停止直前のフレーム以外のフレーム(フレームF(1)〜F(3))は、第1−第4の実施形態と同様に、A端からB端まで連続的に電子走査を行う。
【0061】
第5の実施形態では、混合フレームデータF’(1)は、図10(c)に示すように、フレームF(4)の折り返しの部分フレームデータF(4)bと、部分フレームデータF(1)aを合成して、F’(1)=F(1)a+F(4)bとして得られる。
【0062】
このように、第5の実施形態によれば、回転停止直前のフレームでの電子走査を回転軸Pで折り返し、折り返し時に得たデータにより180度方向のデータの抜けを補充することができる。なお、CCW回転時には、0度方向のデータに抜けが発生することになるが、この場合にも、回転停止直前のフレームでの電子走査を回転軸Pで折り返し、折り返し時に得たデータを用いることで0度方向のデータの抜けを補充することができる。
【0063】
第5の実施形態は、単独で実施しても良いが、第1乃至第3の実施形態と組み合わせてもよい。
【0064】
(第6の実施形態)
第6の実施形態では、超音波振動子11の回転方向を、0度と180度の位置でCW方向とCCW方向とに半周ごとに切り換える場合において、電子走査の方向を超音波振動子11の回転方向に応じて切り換えるものとしている。
【0065】
図11は、従来の3次元画像生成方法を示す図であり、CW方向(図11(a))、CCW方向(図11(b))のいずれの場合にも、A端からB端に向けて同じ方向に電子走査を行っている。この方法の場合、理想的な直線に対する歪の向き(凸となる方向)がCW方向とCCW方向とで逆向きとなっている。このため、取得した複数の3次元画像データを比較する場合や、4D表示のように動画として表示する場合に、CW方向とCCW方向とで画像がずれて表示されることになる(第3の課題)。
【0066】
第6の実施形態は、この第3の課題を解決するものであり、図12(a)、(b)に示すように、超音波振動子11の回転方向によって、超音波振動子11の電子走査の方向を反転させている。例えば、超音波振動子11をCW方向に回転させるときは、A端からB端に向けて電子走査し、CCW方向に回転させるときは、B端からにA端向けて電子走査する。この手法により、理想的な直線に対する歪の向きを同じ向きに揃えることが可能となり、CW方向とCCW方向とでの画像のずれを解消することができる。
【0067】
(第6の実施形態の変形例)
第6の実施形態によれば、CW方向とCCW方向とでの画像のずれを解消することができるものの、図12(a)、(b)から判るように、いずれも180度方向の領域にデータ抜けが生じている。第6の実施形態の変形例は、このデータ抜けを解消するために、第5の実施形態の手法を第6の実施形態に取り入れたものである。
【0068】
例えば、図13(a)に示すように、CW回転時は、回転停止直前のフレーム(フレームF(4))のみ例外的な電子走査を行い、A端から回転軸Pまで電子走査したのち回転軸PからA端まで折り返して電子走査する。一方、回転停止直前のフレーム以外のフレーム(フレームF(1)〜F(3))は、A端からB端まで連続的に電子走査を行う。これに対して、CCW回転時は、図13(b)に示すように、回転開始直後のフレーム(フレームF(4))のみ例外的な電子走査を行い、A端から回転軸Pまで電子走査したのち回転軸PからA端まで折り返して電子走査する。一方、回転開始直後のフレーム以外のフレーム(フレームF(1)〜F(3))は、CW回転時とは逆にB端からA端まで連続的に電子走査を行う。
【0069】
このような手法により、CW方向とCCW方向とでの画像のずれを解消すると共に、特定の方向(例えば180度方向)のデータ抜けを解消することができる。
【0070】
上述した各実施形態に係る超音波診断装置によれば、ハードウェア及びソフトウェア規模の拡大を最小限に抑制しつつ、画像の歪や空間分解能の低下を生じさせることのない3次元画像の表示や4D表示を行うことが出来る。
【0071】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0072】
1 超音波診断装置
10 超音波プローブ
11 超音波振動子
12 駆動モータ
22 フレーム記憶部
23 走査制御部
25 駆動制御部
30 画像処理部
31 合成部
32 画像生成部
70 制御部
【特許請求の範囲】
【請求項1】
機械的に回転可能な超音波振動子を具備し、前記超音波振動子を回転させながら、超音波ビームを回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって繰り返し電子走査する超音波プローブと、
前記一方の端から前記他方の端までの1回の電子走査をフレームとし、前記フレーム内の受信データをフレームデータとするとき、複数の前記フレームデータを記憶するフレーム記憶部と、
前記フレーム記憶部に記憶される複数のフレームデータから、第1のフレームに対応する第1のフレームデータと、前記第1のフレームに隣接する第2のフレームに対応する第2のフレームデータを抽出し、前記第1のフレームデータの一部と、前記第2のフレームデータの一部とを合成して、前記1回の電子走査範囲をカバーする混合フレームデータを生成する合成部と、
複数の前記混合フレームデータから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項2】
前記第1のフレームデータは前記第2のフレームデータの直後または直前に得られる前記フレームデータであり、
前記合成部は、前記第1のフレームデータのうちの前記一方の端から前記回転軸までの電子走査範囲に対応する第1の部分フレームデータと、前記第2のフレームデータのうちの前記回転軸から前記他方の端までの電子走査範囲に対応する第2の部分フレームデータとを合成して前記混合フレームデータを生成する、
ことを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記画像生成部は、
前記混合フレームデータが、前記第1のフレームの前記電子走査が開始されたときの前記機械的回転軸方向から得られたものとして、前記3次元画像を生成する、
ことを特徴とする請求項2に記載の超音波診断装置。
【請求項4】
前記画像生成部は、
前記第1、および第2の部分フレームデータは、前記第1のフレームの前記電子走査が開始されたときの機械的回転角度を所定量だけ補正した回転角度から得られたものとして、前記3次元画像を生成する、ことを特徴とする請求項2に記載の超音波診断装置。
【請求項5】
停止した状態から機械的に半周回転して一旦停止した後、逆方向に半周回転して停止するシーケンスを繰り返す超音波振動子を具備し、回転中および停止中に、超音波ビームを、前記超音波振動子の回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって直線状に繰り返し電子走査するよう指示される超音波プローブと、
前記一方の端から前記他方の端までの1回の電子走査をフレームとし、前記フレーム内の受信データをフレームデータとするとき、複数の前記フレームデータを記憶するフレーム記憶部と、
前記フレーム記憶部に記憶される複数のフレームデータから、停止中のフレームに対応する第1のフレームデータと、回転開始直後または回転停止直前のフレームに対応する第2のフレームデータを抽出し、前記第1のフレームデータの一部と、前記第2のフレームデータの一部とを合成して、停止位置における前記1回の電子走査範囲をカバーする停止位置混合フレームデータを生成する合成部と、
前記停止位置混合フレームデータと回転中のフレームから得られる回転中フレームデータとから、または前記第1のフレームデータと前記回転中フレームデータとから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項6】
前記合成部は、
前記第1のフレームデータのうちの前記回転軸から前記他方の端までの電子走査範囲に対応する第1の部分フレームデータと、前記第2のフレームデータのうちの前記一方の端から前記回転軸までの電子走査範囲に対応する第2の部分フレームデータとを合成して、前記停止位置混合フレームデータを生成する、
ことを特徴とする請求項5に記載の超音波診断装置。
【請求項7】
前記合成部は、
前記第1のフレームデータのうちの前記一方の端から前記回転軸までの電子走査範囲に対応する第1の部分フレームデータと、前記第2のフレームデータのうちの前記回転軸から前記他方の端までの電子走査範囲に対応する第2の部分フレームデータとを合成して、前記停止位置混合フレームデータを生成する、
ことを特徴とする請求項5に記載の超音波診断装置。
【請求項8】
停止した状態から機械的に半周回転して一旦停止した後、逆方向に半周回転して停止するシーケンスを繰り返す超音波振動子を具備し、超音波ビームを前記超音波振動子の回転軸に平行でかつ前記回転軸を含む平面を電子走査する超音波プローブであって、回転停止直前または回転開始直後に該当する第1のフレームでは、前記平面の一方の端から前記回転軸まで電子走査したのち前記回転軸から前記一方の端まで折り返して電子走査し、前記第1のフレーム以外に該当する第2のフレームでは、前記平面を一方の端から他方の端まで繰り返し電子走査する超音波プローブと、
前記第1のフレームに対応する第1のフレームデータと、前記第2のフレームに対応する複数の第2のフレームデータとを記憶するフレーム記憶部と、
前記複数の第1のフレームデータと前記第2のフレームデータとから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項9】
停止した状態から機械的に半周回転して一旦停止した後、逆方向に半周回転して停止するシーケンスを繰り返す超音波振動子を具備し、前記超音波振動子の回転軸に平行でかつ前記回転軸を含む平面を、正方向回転時には前記平面の一方の端から他方の端までの正フレームを直線状に繰り返し電子走査し、逆方向回転時は、前記平面の前記他方の端から前記一方の端までの逆フレームを直線状に繰り返し電子走査する超音波プローブと、
前記正フレームに対応する複数の正フレームデータと、前記逆フレームに対応する複数の逆フレームデータとを記憶するフレーム記憶部と、
前記正方向回転時は、前記複数の正フレームデータから3次元画像を生成し、前記逆方向回転時は、前記複数の逆フレームデータから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項10】
前記超音波プローブは、
回転停止直前または回転開始直後に該当する前記正フレーム、若しくは回転停止直前または回転開始直後に該当する前記逆フレームでは、前記平面の一方の端から前記回転軸まで電子走査したのち前記回転軸から前記一方の端まで折り返して電子走査する、
ことを特徴とする請求項9に記載の超音波診断装置。
【請求項1】
機械的に回転可能な超音波振動子を具備し、前記超音波振動子を回転させながら、超音波ビームを回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって繰り返し電子走査する超音波プローブと、
前記一方の端から前記他方の端までの1回の電子走査をフレームとし、前記フレーム内の受信データをフレームデータとするとき、複数の前記フレームデータを記憶するフレーム記憶部と、
前記フレーム記憶部に記憶される複数のフレームデータから、第1のフレームに対応する第1のフレームデータと、前記第1のフレームに隣接する第2のフレームに対応する第2のフレームデータを抽出し、前記第1のフレームデータの一部と、前記第2のフレームデータの一部とを合成して、前記1回の電子走査範囲をカバーする混合フレームデータを生成する合成部と、
複数の前記混合フレームデータから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項2】
前記第1のフレームデータは前記第2のフレームデータの直後または直前に得られる前記フレームデータであり、
前記合成部は、前記第1のフレームデータのうちの前記一方の端から前記回転軸までの電子走査範囲に対応する第1の部分フレームデータと、前記第2のフレームデータのうちの前記回転軸から前記他方の端までの電子走査範囲に対応する第2の部分フレームデータとを合成して前記混合フレームデータを生成する、
ことを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記画像生成部は、
前記混合フレームデータが、前記第1のフレームの前記電子走査が開始されたときの前記機械的回転軸方向から得られたものとして、前記3次元画像を生成する、
ことを特徴とする請求項2に記載の超音波診断装置。
【請求項4】
前記画像生成部は、
前記第1、および第2の部分フレームデータは、前記第1のフレームの前記電子走査が開始されたときの機械的回転角度を所定量だけ補正した回転角度から得られたものとして、前記3次元画像を生成する、ことを特徴とする請求項2に記載の超音波診断装置。
【請求項5】
停止した状態から機械的に半周回転して一旦停止した後、逆方向に半周回転して停止するシーケンスを繰り返す超音波振動子を具備し、回転中および停止中に、超音波ビームを、前記超音波振動子の回転軸に平行でかつ前記回転軸を含む平面の一方の端から他方の端に向かって直線状に繰り返し電子走査するよう指示される超音波プローブと、
前記一方の端から前記他方の端までの1回の電子走査をフレームとし、前記フレーム内の受信データをフレームデータとするとき、複数の前記フレームデータを記憶するフレーム記憶部と、
前記フレーム記憶部に記憶される複数のフレームデータから、停止中のフレームに対応する第1のフレームデータと、回転開始直後または回転停止直前のフレームに対応する第2のフレームデータを抽出し、前記第1のフレームデータの一部と、前記第2のフレームデータの一部とを合成して、停止位置における前記1回の電子走査範囲をカバーする停止位置混合フレームデータを生成する合成部と、
前記停止位置混合フレームデータと回転中のフレームから得られる回転中フレームデータとから、または前記第1のフレームデータと前記回転中フレームデータとから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項6】
前記合成部は、
前記第1のフレームデータのうちの前記回転軸から前記他方の端までの電子走査範囲に対応する第1の部分フレームデータと、前記第2のフレームデータのうちの前記一方の端から前記回転軸までの電子走査範囲に対応する第2の部分フレームデータとを合成して、前記停止位置混合フレームデータを生成する、
ことを特徴とする請求項5に記載の超音波診断装置。
【請求項7】
前記合成部は、
前記第1のフレームデータのうちの前記一方の端から前記回転軸までの電子走査範囲に対応する第1の部分フレームデータと、前記第2のフレームデータのうちの前記回転軸から前記他方の端までの電子走査範囲に対応する第2の部分フレームデータとを合成して、前記停止位置混合フレームデータを生成する、
ことを特徴とする請求項5に記載の超音波診断装置。
【請求項8】
停止した状態から機械的に半周回転して一旦停止した後、逆方向に半周回転して停止するシーケンスを繰り返す超音波振動子を具備し、超音波ビームを前記超音波振動子の回転軸に平行でかつ前記回転軸を含む平面を電子走査する超音波プローブであって、回転停止直前または回転開始直後に該当する第1のフレームでは、前記平面の一方の端から前記回転軸まで電子走査したのち前記回転軸から前記一方の端まで折り返して電子走査し、前記第1のフレーム以外に該当する第2のフレームでは、前記平面を一方の端から他方の端まで繰り返し電子走査する超音波プローブと、
前記第1のフレームに対応する第1のフレームデータと、前記第2のフレームに対応する複数の第2のフレームデータとを記憶するフレーム記憶部と、
前記複数の第1のフレームデータと前記第2のフレームデータとから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項9】
停止した状態から機械的に半周回転して一旦停止した後、逆方向に半周回転して停止するシーケンスを繰り返す超音波振動子を具備し、前記超音波振動子の回転軸に平行でかつ前記回転軸を含む平面を、正方向回転時には前記平面の一方の端から他方の端までの正フレームを直線状に繰り返し電子走査し、逆方向回転時は、前記平面の前記他方の端から前記一方の端までの逆フレームを直線状に繰り返し電子走査する超音波プローブと、
前記正フレームに対応する複数の正フレームデータと、前記逆フレームに対応する複数の逆フレームデータとを記憶するフレーム記憶部と、
前記正方向回転時は、前記複数の正フレームデータから3次元画像を生成し、前記逆方向回転時は、前記複数の逆フレームデータから3次元画像を生成する画像生成部と、
を備えたことを特徴とする超音波診断装置。
【請求項10】
前記超音波プローブは、
回転停止直前または回転開始直後に該当する前記正フレーム、若しくは回転停止直前または回転開始直後に該当する前記逆フレームでは、前記平面の一方の端から前記回転軸まで電子走査したのち前記回転軸から前記一方の端まで折り返して電子走査する、
ことを特徴とする請求項9に記載の超音波診断装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−85875(P2012−85875A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−235835(P2010−235835)
【出願日】平成22年10月20日(2010.10.20)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月20日(2010.10.20)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]