
超音波診断装置

【課題】被検体や超音波プローブが多少ぶれても画質低下がない超音波診断装置の提供。
【解決手段】造影剤が投与された被検体へ超音波を送信し超音波走査することにより、前記被検体の超音波画像を取得する超音波診断装置において、前記超音波走査によりエコー信号を取得する送受信ユニットと、前記エコー信号に基づき前記造影剤が映像化された複数の画像データを生成する画像データ生成ユニットと、前記複数の画像データのうち第1の画像データに対して、画像領域全体より小さな関心領域を設定する設定ユニットと、前記第1の画像データと異なる第2の画像データに対して、前記関心領域に対応する位置を検出することにより、前記第1及び第2の画像データとの間の動き補正を行う画像補正ユニットと、前記動き補正後の画像データへ輝度値保持演算を施して表示画像を生成する画像生成ユニットと、を具備する超音波診断装置。
【解決手段】造影剤が投与された被検体へ超音波を送信し超音波走査することにより、前記被検体の超音波画像を取得する超音波診断装置において、前記超音波走査によりエコー信号を取得する送受信ユニットと、前記エコー信号に基づき前記造影剤が映像化された複数の画像データを生成する画像データ生成ユニットと、前記複数の画像データのうち第1の画像データに対して、画像領域全体より小さな関心領域を設定する設定ユニットと、前記第1の画像データと異なる第2の画像データに対して、前記関心領域に対応する位置を検出することにより、前記第1及び第2の画像データとの間の動き補正を行う画像補正ユニットと、前記動き補正後の画像データへ輝度値保持演算を施して表示画像を生成する画像生成ユニットと、を具備する超音波診断装置。
【発明の詳細な説明】
【技術分野】
【0001】
被検体の動きや超音波プローブを把持する操作者の手ぶれの影響を補正する機能を備えた超音波診断装置に関する。
【背景技術】
【0002】
近年、超音波診断に使用される、静脈投与型の超音波造影剤が製品化され、「造影エコー法」が行われるようになってきている。造影エコー法は、静脈から超音波造影剤を注入して血流信号を増強して、心臓や肝臓などの血流動態を評価するものである。造影剤の多くは、微小気泡(造影剤バブル)が反射源として機能するものである。バブルというデリケートな基材の性質上、通常の診断レベルの超音波送信であっても、その機械的作用によりバブルが壊れ、結果的にスキャン面からの信号強度が低下する。したがって、還流の動的な様子をリアルタイムで観察するためには、低音圧の超音波送信により映像化するなど、スキャンによるバブルの崩壊を低減させることが必要となる。
【0003】
また、バブルが崩壊するという性質を生かして、以下のような手法も開発されている。即ち、A低音圧の超音波を送信してスキャン面に充満していくバブルの動態を観察し、B超音波の音圧を高音圧に切り替えてスキャン面内(厳密には照射体積内)のバブルを崩壊させ、C再び超音波の音圧を低音圧に切り替えてスキャン面内に流入していくバブルの様子を観察する、という手法である。この手法は「Replenishment(再環流)」法と呼ばれている(例えば、特許文献1参照)。
【0004】
ところで、造影剤バブルの特徴は、カラードプラでは映像化できない微小血流を映像化できる点にある。しかしながら、微小血流内には少数のバブルしか存在しないため、染影は非定常的である。そこで、非定常的に現れる造影剤バブルの染影を重畳して、微小血流の構造を明瞭に映像化する手法が開発された。この手法は、「Micro flow imaging(MFIとする)」と呼ばれている(例えば、特許文献2参照。)。
【0005】
MFIの実施にあたっては、生成される複数フレーム分の超音波画像を重畳させる必要があることから、被検体は一定時間にわたって息を止め、また操作者は一定時間にわたって超音波プローブを固定する必要がある。
【0006】
しかしながら、被検体にとって一定時間にわたり息を止めることは容易なことではないし、MFIに慣れていない操作者にとって、一定時間にわたり超音波プローブを固定することは容易なことではない。したがって、MFIにおいて画像品質を高めるためには、超音波画像のぶれ補正が非常に有効となる。
【0007】
ところで、動画像のような連続する複数フレームの画像をぶれ補正する技術は、既に市販のビデオカメラなどにも搭載されている。代表的な手法としては、画像データのフレーム間の相対的な動きベクトルを算出する手法がある。この手法では、1フレーム分の画像データが複数の領域に分けられ、それぞれの領域における画像データ間の相関から、領域ごとにフレーム間の動きベクトルが求められる。このように領域ごとに算出された複数の動きベクトルを使用して、画像データの表示位置を補正すれば、カメラを持つ手が多少ぶれても、被写体の表示位置は変化せず、動画像の視認性が向上する。
【0008】
超音波診断のぶれ補正と類似する技術として、「Panoramic imaging」と呼ばれる技術が知られている。これは、超音波プローブを少しずつ移動させながら複数フレーム分の超音波画像を取得して、これらを超音波画像における、互いに重複する部分をうまく繋ぎ合わせることで、パノラマ写真のような広範囲の静止画像を構成する技術である。この「Panoramic imaging」では、複数フレーム分の超音波画像における、互いに重複する部分を繋ぎ合わせる必要があることから、超音波画像の場合と同様にフレーム間の相対的な動きベクトルが必要となる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平11−155858号公報
【特許文献2】特開2004−321688号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、通常の断層画像、即ち造影剤が投与されていない被検体から生成された超音波画像をぶれ補正することは比較的容易である。それは、通常の断層画像には、動きベクトルを検出する際に目印となる組織や骨などが映り込んでいるからである。
【0011】
しかしながら、造影画像、即ち造影剤が投与された被検体からの超音波画像は、バブルの染影が非定常的であるため、通常の超音波画像におけるぶれ補正の技術をそのまま適用することはできない。特にMFIにおいては、高音圧の超音波によってバブルを一掃してから再環流を映像化するため、バブルを一掃した直後に生成される画像には、ぶれ補正のための目印がほとんど存在しない。しかも、バブルを一掃した直後に生成される画像では、映像化されたバブルの様子が刻々と変化するため、従来の方法では、動きベクトルを抽出することが困難であった。
【0012】
本発明は、上記事情を鑑みてなされたもので、被検体や超音波プローブが多少ぶれても、画質が低下することがない超音波診断装置を提供することを目的としている。
【課題を解決するための手段】
【0013】
本実施形態に係る超音波診断装置は、造影剤が投与された被検体へ超音波を送信し超音波走査することにより、前記被検体の超音波画像を取得する超音波診断装置であって、前記超音波走査によりエコー信号を取得する送受信ユニットと、前記エコー信号に基づき前記造影剤が映像化された複数の画像データを生成する画像データ生成ユニットと、前記複数の画像データのうち第1の画像データに対して、画像領域全体より小さな関心領域を設定する設定ユニットと、前記第1の画像データと異なる第2の画像データに対して、前記関心領域に対応する位置を検出することにより、前記第1及び第2の画像データとの間の動き補正を行う画像補正ユニットと、前記動き補正後の画像データへ輝度値保持演算を施して表示画像を生成する画像生成ユニットと、を具備する。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の第1の実施形態における超音波診断装置のブロック図である。
【図2】図2は、第1の実施形態における各種トラックボールの概略図である。
【図3】図3は、第1の実施形態における各種ボタンの概略図である。
【図4】図4は、第1の実施形態における超音波診断装置によって実行される処理手順のフローチャートである。
【図5】図5は、第1の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【図6】図6(A)、図6(B)、図6(C)、図6(D)、図6(E)は、第1の実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。
【図7】図7は、第1の実施形態の変形例における3つのROIマークが重畳表示された診断画像の概略図である。
【図8】図8(A)、図8(B)、図8(C)、図8(D)、図8(E)は、本発明の第3の実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。
【図9】図9は、第4の実施形態に係るぶれ補正を含むMFIにおける処理の流れを示したフローチャートである。
【図10】図10は、第4の実施形態に係るぶれ補正を説明するための図である。
【図11】図11は、第5の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【図12】図12は、第5の実施形態における相関量の算出方法の説明図である。
【図13】図13は、第6の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【図14】図14は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【図15】図15は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【図16】図16は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【図17】図17は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【発明を実施するための形態】
【0015】
以下、図面を参照しながら、第1の実施形態乃至第12の実施形態について説明する。
(第1の実施形態)
先ず、図1〜図6を参照して、第1の実施形態について説明する。
[超音波診断装置の構成]
図1は本発明の第1の実施形態における超音波診断装置のブロック図である。
【0016】
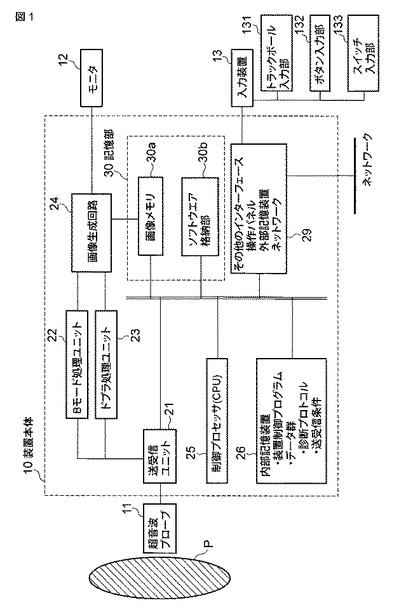
図1に示すように、本実施形態における超音波診断装置は、装置本体10、超音波プローブ11、モニタ12、及び入力装置13を具備している。
【0017】
装置本体10は、送受信ユニット21、Bモード処理ユニット22、ドプラ処理ユニット23、画像生成回路24、制御プロセッサ25、内部記憶装置26、インターフェース29、及び画像メモリ30aとソフトウェア格納部30bを有する記憶部30を具備している。
【0018】
なお、装置本体10に内蔵される送受信ユニット21などは、集積回路などのハードウェアで構成されることもあるが、ソフトウェア的にモジュール化されたソフトウェアプログラムである場合もある。以下、個々の構成要について説明する。
【0019】
超音波プローブ11は、被検体Pの検査部位に超音波を送受信するものであって、その内部には、超音波を送受信するための圧電振動子が配置されている。この圧電振動子は、複数の素子に分割されていて、それぞれの素子がいわゆるチャンネルの一部を構成している。なお、超音波プローブ11が2Dアレイ振動子を備えていれば、三次元データの取得も可能である。
【0020】
超音波プローブ11から被検体Pに送信された超音波(以下、「送信超音波」とする。)は、体内組織の音響インピーダンスの不連続面で次々と反射され、エコー信号として超音波プローブ11に受信される。エコー信号の振幅は、反射することになった不連続面における音響インピーダンスの差に依存する。また、送信超音波が血流や心臓壁などの移動体の表面で反射した場合、エコー信号は、ドプラ効果によって、移動体における超音波の送信方向の速度成分に依存して周波数偏移を受ける。
【0021】
モニタ12は、画像生成回路24からのビデオ信号に基づき、被検体P内の形態学的情報や血流情報などを診断画像として表示する。また、モニタ12は、ROIマークを診断画像上に重畳表示する。
【0022】
入力装置13は、装置本体10に接続されていて、オペレータからの指示を装置本体10に取り込むための、各種トラックボール入力部131、各種ボタン入力部132、及び各種スイッチ入力部133などを有している。
【0023】
図2は同実施形態におけるトラックボール入力部131の概略図である。
【0024】
図2に示すように、トラックボール入力部131は、ROIの数の指定に使用される数指定用トラックボール131aと、ROIのサイズの指定に使用されるサイズ指定用トラックボール131bとを備えている。
【0025】
図3は同実施形態におけるボタン入力部132の概略図である。
【0026】
図3に示すように、ボタン入力部132は、動き検出および動き補正の開始と終了の指示に使用されるオートアジャストボタン132aと、画像データの重畳の開始と終了の指示に使用されるスタートボタン132bと、高音圧スキャンの実行の指示に使用されるフラッシュボタン132cと、低音圧スキャンの停止の指示に使用されるフリーズボタン132dとを備えている。
【0027】
なお、オペレータからの指示には、この他に、ROIの形状の指定、低音圧スキャンの実行時間の指定、ぶれ補正の実行時間の指定、ROIマークの表示と非表示の指示なども存在する。したがって、入力装置13は、トラックボール131a〜131b、及びボタン132a〜132cの他に、それぞれの指示に対応するトラックボール、ボタン、スイッチなどを備えている。
【0028】
送受信ユニット21は、パルサ回路、遅延回路、及びトリガ発生回路を具備している。パルサ回路は、所定のレート周波数で送信超音波を形成するためのレートパルスを繰り返し発生する。遅延回路は、各レートパルスに対して、チャンネルごとに送信超音波をビーム状に収束して且つ送信指向性を決定するのに必要な遅延時間を与える。超音波プローブ11からの超音波の送信方向は、遅延回路により与えられる遅延時間の調整によって制御される。トリガ発生回路は、遅延時間が調整されたレートパルスに基づき、所定のタイミングで超音波プローブ11に駆動パルスを印加する。
【0029】
なお、送受信ユニット21は、制御プロセッサ25からの指示に従って、遅延情報、送信周波数、送信駆動電圧などを瞬時に変更可能な機能を具備している。特に送信駆動電圧の変更については、瞬間にその値を切り替えることが可能なリニアアンプ型の発信回路、または複数の電源ユニットを電気的に切り替える機構によって実現される。
【0030】
さらに、送受信ユニット21は、アンプ回路、A/D変換器、及び加算器を具備している。アンプ回路は、超音波プローブ11から取り込まれたエコー信号をチャンネルごとに増幅する。A/D変換器は、チャンネルごとに増幅されたエコー信号に対して、超音波の受信指向性を決定するのに必要な遅延時間を与える。加算器は、チャンネルごとに遅延時間が与えられたエコー信号を加算して受信信号を生成する。これにより、エコー信号の受信指向性に応じた方向からの反射成分が強調される。
【0031】
Bモード処理ユニット22は、送受信ユニット21から出力される受信信号に対して、対数増幅、法絡線検波処理などを実行して、受信信号の信号強度が輝度の明るさで表現される強度データを生成する。
【0032】
ドプラ処理ユニット23は、送受信ユニット21から出力される受信信号に基づき、血流、組織、及び造影剤バブルなどの速度情報を算出して、平均速度、分散、及びパワー、及びこれらの組み合わせなどの血流データを生成する。
【0033】
画像生成回路24は、Bモード処理ユニット22やドプラ処理ユニット23から出力される強度データや血流データを座標変換して、テレビなどに代表されるビデオフォーマットの走査線信号列にする。これにより、被検体Pの組織形状に関する断層画像、血管内を流れる造影剤バブルが特に強調された造影画像、及び血流の速度に関する平均速度画像、分散画像、パワー画像、これらの組み合わせ画像などが生成される。また、画像生成回路24は、画像データを格納する記憶メモリを具備している。これにより、操作者は、検査中に記録された画像を診断後に呼び出すことが可能となっている。
【0034】
制御プロセッサ25(CPU)は、情報処理装置としての機能を具備し、本超音波診断装置の各部を制御する。制御プロセッサ25は、内部記憶装置26から画像生成や画像表示などを実行するための制御プログラムを読み出し、これをソフトウェア格納部30b上に展開して、各種処理に関する演算・制御などを実行する。
【0035】
また、制御プロセッサ25は、画像データ上に検索領域を作成して、その内側に含まれるピクセルの輝度を検出する。さらに、制御プロセッサ25は、複数の画像データのROIに含まれる複数のピクセルの輝度に基づき、これら画像データ間の動きを表現する動きベクトルを生成する。
【0036】
内部記憶装置26は、画像生成や表示処理を実行するための制御プログラムや、診断情報(ID、医師の所見など)、診断プロトコル、送受信条件、その他のデータ群を保管している。特に、内部記憶装置26は、超音波を送受信するためのスキャンシーケンス、ROIの設定、ぶれ補正、差分画像生成処理、輝度血保持演算処理、重畳表示などを実行するための制御プログラムを保管している。さらに、内部記憶装置26は、必要に応じて、画像メモリ30a中の画像データの保管などにも使用される。内部記憶装置26のデータは、インターフェース29を経由して外部周辺装置へ転送することも可能となっている。
【0037】
インターフェース29は、入力装置13、ネットワーク、及び新たな外部記憶装置に関するインターフェースである。取得された超音波画像などのデータや解析結果などは、このインターフェース29によってネットワークを通じて他の装置に転送されることもある。
【0038】
画像メモリ30aは、画像生成回路24から出力された画像データを格納する記憶メモリからなる。記憶メモリに格納された画像データは、例えば診断後に操作者が呼び出すことが可能となっていて、静止画的に、あるいは複数フレーム分を使用して動画的に再生されることもある。また、画像メモリ30aは、送受信ユニット21直後の出力信号(radio frequency信号と呼ばれる。)、送受信ユニット21通過後の輝度信号、その他の生データ、ネットワークを通じて取得された画像データなどを必要に応じて記憶する。
【0039】
[超音波診断装置の使用方法]
最初に、数指定用トラックボール131aとサイズ指定用トラックボール131bの操作によって、ROIの数とサイズが指定される。なお、本実施形態において、ROIの形状は、事前に長方形状に設定されているが、トラックボールなどの操作によって指定されることもある。
【0040】
次に、低音圧スキャンが開始される。この低音圧スキャンは、血流の環流を画像化するためのものであって、何度も繰り返して実行される。なお、ROIの数とサイズの設定前から低音圧スキャンが開始されていることもある。
【0041】
低音圧スキャンで使用される超音波は、造影剤バブルが崩壊しない程度の低い音圧に設定されている。したがって、低音圧スキャンが実行されるたびに、造影剤バブルの染影が描出された1フレーム分の画像データが生成される。これらの画像データは、生成されるたびに画像メモリ30aに保存され、同時にモニタ12に表示される。
【0042】
低音圧スキャンの実行中にスタートボタン132bがONにされると、それ以降に生成される画像データが重畳され、1枚の重畳画像データが生成される。画像データの重畳手法としては、最大輝度値保持演算が使用される。この最大輝度値保持演算は、複数フレーム分の画像データを使用して、空間的に対応する複数ピクセルの中で輝度が最も高いピクセルを採用して画像化する手法である。したがって、最大輝度値保持演算が実行されると、それぞれの画像データに描出された造影剤バブルの染影が連結され、結果として、重畳画像データに被検体Pの血管構造が描出される。この重畳画像データは、診断画像としてモニタ12に表示される。即ち、低音圧スキャンの実行中にスタートボタン132bがONにされると、MFIが開始される。
【0043】
画像データの重畳中にスタートボタン132bがOFFにされると、それまで実行されていた画像データの重畳が停止され、再び低音圧スキャンごとに生成される画像データがモニタ12に表示される。
【0044】
低音圧スキャンの実行中にフラッシュボタン132cがONにされると、高音圧スキャンが1フレーム分だけ実行される。この高音圧スキャンは、「フラッシュ」と呼ばれることもある。
【0045】
高音圧スキャンで使用される超音波は、造影剤バブルが崩壊する程度の高い音圧に設定されている。したがって、高音圧スキャンが実行されると、スキャン面に存在する全ての造影剤バブルが破壊され、モニタ12に表示される診断画像から造影剤バブルによる染影が消失する。これにより、モニタ12には真っ暗な様子が表示される。しかしながら、真っ暗な状態は、長期間にわたって継続するわけではなく、ある程度の時間が経過すると、太い血管から徐々に造影剤バブルの染影がはじまる。
【0046】
低音圧スキャンの実行中にフリーズボタン132dがONにされると、当該低音圧スキャンが停止される。このとき、画像データの重畳や動き検出モードが作動していれば、これらも同時に停止される。
【0047】
低音圧スキャンの実行中にオートアジャストボタン132aがONにされると、動き検出モードが開始される。動き検出モードは、動き検出におけるスタンバイモードであって、実際に何らかの処理が実行されるわけではない。
【0048】
次に、動き検出モードについて説明する。
【0049】
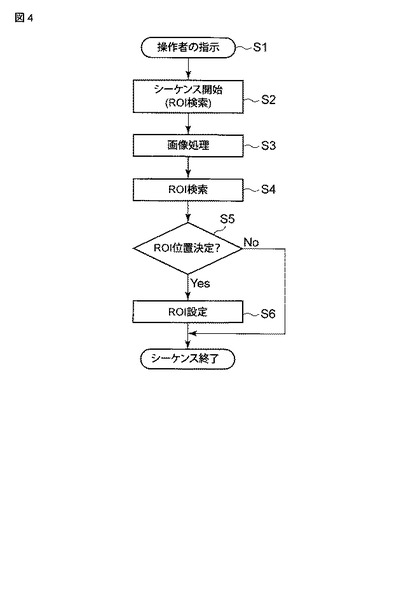
図4は同実施形態におけるROIの設定シーケンスのフローチャートである。
【0050】
図4に示すように、動き検出モードの作動中にスタートボタン132bがONにされると(ステップS1)、ROIの設定シーケンスが開始され(ステップS2)、その直後の画像データが基準画像データに指定される。
【0051】
そして、基準画像データが指定されたら、当該基準画像データに種々の画像処理が施され、ROIの検索対象として実際に使用される参照画像データが生成される(ステップS3)。基準画像データに施される画像処理としては、平均処理や閾値処理などがある。
【0052】
平均処理が採用される場合、基準画像データの直前に生成された数フレーム分の画像データが使用され、これら画像データにおいて空間的に対応する複数のピクセルの平均輝度に基づいて参照画像データが生成される。
【0053】
閾値処理が採用される場合、基準画像データのフレーム全体の平均輝度、もしくはそれよりも高い輝度が閾値に設定され、この閾値によって2値化された基準画像データのピクセルの輝度に基づいて参照画像データが生成される。
【0054】
したがって、平均処理もしくは閾値処理によって生成される参照画像データには、ノイズ成分がほとんど無く、造影剤バブルの染影もしくは生体組織だけが反映されていることになる。
【0055】
参照画像データが生成されたら、ROIと同じサイズ及び形状の検索領域が参照画像データ上に作成される。この検索領域は、参照画像データ全体にわたって移動する。そして、検索画像領域が1ピクセル分だけ移動するたびに、その内側に含まれるピクセルの輝度が検出される(ステップS4)。
【0056】
そして、検索領域に含まれる全ピクセルに占める、輝度が閾値K以上のピクセルが閾値M個以上となる画像領域(以下、「ROIの条件を満たす画像領域」とする。)が発見されたら、その中から、輝度がK以上のピクセルが最も多かった画像領域が検索され(ステップS5のYes)、その画像領域にROIが設定される(ステップS6)。以上で、ROIの設定シーケンスが終了となる(ステップS7)。
【0057】
なお、設定されたROIは、図5に示すように、矩形枠状のROIマークとして、モニタ12に表示される診断画像に重畳される。また、ROIを複数利用する場合には、利用する数だけのROIが設定されるまで、ROIの設定シーケンスが実行される。被検体への造影剤投与直後やフラッシュ送信直後においては、画面上に高輝度領域(すなわち造影剤流入領域)は存在せず、画像上には高輝度領域が徐々に出現するのが一般的である。従って、本ROIの設定シーケンスに従えば、例えば画像上に高輝度領域が1つ出現した場合にはROIが一つ設定され、その後高輝度領域が二箇所になった場合には2つのROIが設定されるといった具合に、画像上の高輝度領域の増加に伴って設定されるROIの数が増えることになる。従って、例えば3つのROIを利用する場合であれば、画像上にROIの条件を満たす高輝度領域が3つ出現し、これらに対応した3つのROIが設定されるまで、本実施形態に係るROIの設定シーケンスが実行されることになる。
【0058】
一方、検索領域が参照画像データ上を全体にわたって移動しても、ROIの条件を満たす画像領域が発見されなかった場合(ステップ5のNo)、ROIの設定シーケンスが終了となる(ステップS7)。
【0059】
このように、ROIの条件を満たす画像領域が発見されずにROIの設定シーケンスが終了した場合、続いて生成される画像データが基準画像データに指定され、再度ROIの検索シーケンスが実行される。こうして、ROIが設定されるまで、ROIの設定シーケンスは繰り返される。
【0060】
続いて、基準画像データ(参照画像データ)上のROIに基づいて、基準画像データに後行する各画像データ上において当該ROIと対応する領域(対応領域)を設定する。この設定は、例えば後行する各画像データ上においてROIと同形状、同サイズの領域をスイープさせ、輝度分布パターン等が最も近いものを対応領域とすることができる。
【0061】
以上の手続を経て、各画像データにROIが設定されたら、基準画像データのROIに含まれるピクセルの輝度と、基準画像データに後行する各画像データの対応領域内に含まれるピクセルの輝度との相関から、基準画像データとこれに後行する画像データとの動きを表現した動きベクトルが生成される。なお、動きベクトルを生成する手法については、特に限定はない。具体例としては、動き認識で一般的なブロックマッチングの手法であるSAD(Sum of Absolute Difference)を利用することができる。
【0062】
そして、動きベクトルが生成されたら、当該動きベクトルに基づき、基準画像データに後行する画像データの表示位置が補正される。これにより、基準画像データに対して殆んどぶれが存在しない補正画像データが生成される。
【0063】
補正画像データは、生成されるたびに、最大輝度値保持演算によって基準画像データに重畳される。したがって、補正画像データの重畳が実行されている期間は、スキャン面に流入する造影剤バブルの染影が連結されてゆき、モニタ12に表示される診断画像には、被検体Pの血管構造が描出される。しかも、基準画像データに重畳される補正画像データは、事前の処理によって、ぶれ補正されているから、多数フレーム分の補正画像データが重畳されても、モニタ12に表示される診断画像は非常に鮮明なものとなる。したがって、被検体Pの動きの影響や超音波プローブ11を把持する手ぶれの影響が無い、非常に鮮明な診断画像が取得される。
【0064】
なお、例えば(1)フレーム目〜(2)フレーム目までの画像データに、ROIの条件を満たす領域が無かった場合、(3)フレーム目の画像データが基準画像データに指定される。そして、(1)フレーム目〜(2)フレーム目の画像データは、(4)フレーム目以降の画像データに基づいて生成される補正画像データと同様に、基準画像データである(3)フレーム目の画像データに重畳される。
【0065】
なお、(1)フレーム目〜(2)フレーム目までの画像データは、ぶれ補正されていないが、ROIの条件を満たす領域が発見されないほどの暗さであることから、これらの画像データが基準画像データに重畳されても、診断画像の品質に全く悪い影響が及ぼされない。
【0066】
次に、フラッシュ直後におけるぶれ補正について説明する。
【0067】
フラッシュ直後にスタートボタン132bがONにされると、ほとんど真っ暗な画像データが基準画像データに指定される。しかしながら、本実施形態では、参照画像データに含まれるピクセルの輝度に基づき、フラッシュ直後の真っ暗な画像データの中でも比較的輝度が高い領域にROIが設定されるから、参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する画像データのROIにおけるピクセルの輝度との相関が得られ易く、基準画像データに後行する画像データのぶれ補正が正確に実行される。したがって、モニタ12に表示される診断画像は、非常に鮮明なものとなる。
【0068】
次に、フラッシュ後における診断画像とROIについて説明する。
【0069】
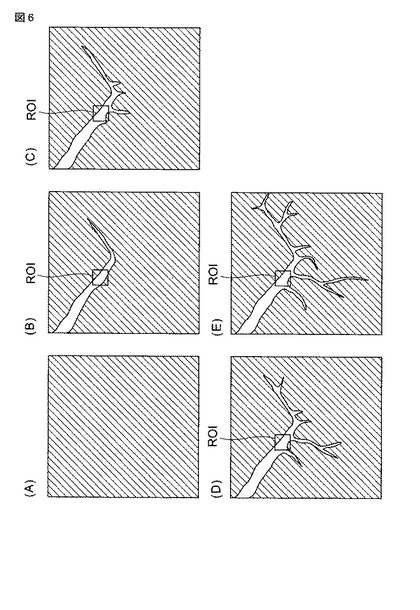
図6は同実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。図6において、白い部分は明るい領域を示し、斜線部分は暗い領域を示している。
【0070】
図6Aはフラッシュの瞬間の診断画像、図6Bはフラッシュ後における1フレーム目の診断画像、図6Cはフラッシュ後における2フレーム目の診断画像、図6Dはフラッシュ後における3フレーム目の診断画像、図6Eはフラッシュ後における4フレーム目の診断画像である。
【0071】
即ち、1フレーム目の診断画像はフラッシュ後に最初に生成された1フレーム目の画像データそのもの、2枚目の診断画像は画像データの1フレーム目と2フレーム目が重畳されたもの、3フレーム目の診断画像は画像データの1フレーム目〜3フレーム目が重畳されたもの、4枚目の診断画像は画像データの1フレーム目〜4フレーム目が重畳されたもの、5フレーム目の診断画像は画像データの1フレーム目〜5フレーム目が重畳されたものである。
【0072】
図6Aに示すように、フラッシュが実行されると、モニタ12に表示されている診断画像は、いったん真っ暗な状態になる。そして、フラッシュが実行されてから時間が経過すると、スキャン面内に存在する太い血管から造影剤バブルが流入してゆき、徐々に診断画像に被検体Pの血管構造が描出されてくる。このときROIの設定シーケンスが作動していれば、図6Bに示すように、条件を満たす領域にROIが設定される。そして、ROIが設定されてからさらに時間が経過すると、図6C〜図6Eに示すように、血管構造がより明瞭化される。このとき、最初に設定されたROIの位置は、固定されたままである。
【0073】
なお、本実施形態では、ROIの検索にあたり、検索領域に含まれるピクセルの輝度が閾値Kによって二値化されている。しかしながら、本発明は、これに限定されるものではない。例えば、検索領域に含まれるピクセルの輝度に関してヒストグラムを作成し、輝度が高い方から数えて所定パーセント(例えば20%)に含まれるピクセルの輝度に基づき、ROIの検索をしても良い。こうすれば、ノイズ成分がROIの検索に影響し難くなるから、前述の平均処理や閾値処理などの画像処理が不要となる。
【0074】
この他にも、閾値を二つ設け、その二つの値の間にある輝度値をもつピクセルに基づいてROIの検索をしてもよい。一般的に太い血管などは、造影剤バブルの流入により非常に高輝度となる。しかしながら、このような太い血管を含む領域にROIが設定されても、その太さのために、ぶれ補正のための特徴領域としての機能を充分に果たさない場合が多い。したがって、このような非常に高輝度なピクセルをROI検索の対象外とすることで、ぶれ補正に適した特徴領域をROIとして抽出することができる。
【0075】
(本実施形態による作用)
本実施形態では、スタートボタン132bがONにされた直後の画像データが基準画像データに指定される。そして、当該基準データから生成された参照画像データの輝度に基づき、造影剤バブルの染影が密集する太い血管を含む領域にROIが設定される。
【0076】
そのため、参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する各画像データの対応領域におけるピクセルの輝度の相関が得られ易く、基準画像データに後行する画像データのぶれ補正が正確に実行されるから、重畳によって生成される診断画像は、非常に鮮明なものとなる。
【0077】
本実施形態において、フラッシュボタン132cが押された直後の画像データが基準画像データに指定される。そして、当該基準画像データから生成された参照画像データの輝度に基づき、造影剤バブルの染影が速く回復する太い血管を含む領域にROIが設定される。
【0078】
これにより、フラッシュ直後のように、参照画像データにぶれ補正の目印となる領域があまり存在しない場合であっても、比較的速く造影剤バブルが染影しはじめる太い血管を含む領域にROIが自動的に設定される。
【0079】
そのため、参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する各画像データの対応領域におけるピクセルの輝度の相関が得られ易く、基準画像データに後行する画像データのぶれ補正が正確に実行されるから、重畳によって生成される診断画像は、非常に鮮明なものとなる。
【0080】
本実施形態において、参照画像データは、事前の画像処理によって、ノイズ成分が除去されている。そのため、ROIの設定にノイズの影響が作用しないから、太い血管を含む領域に正確にROIが設定される。
【0081】
本実施形態において、ROIに含まれるピクセル数は、画像データ全体のピクセル数よりも少ない。そのため、基準画像データから生成された参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する各画像データの対応領域におけるピクセルの輝度との相関を求めるのに必要な計算量が非常に少なくなる。
【0082】
本実施形態において、フラッシュボタン132cがONにされると同時に、ぶれ補正が開始される。したがって、フラッシュ直後からスキャン面に流入してくる造影剤バブルの染影が漏れなく重畳される。その結果、被検体Pの血管構造が診断画像上にほとんど完全な姿で描出される。
【0083】
本実施形態において、モニタ12は、診断画像上にROIマークを重畳表示する。そのため、操作者は、モニタ12に表示された診断画像を見ることによって、ROIの設定が適正であるか確認することができる。
【0084】
本実施形態において、入力装置13は、ROIマークの表示と非表示とを切り替えるボタンもしくはスイッチを備えている。そのため、診断においてROIマークが邪魔なときに、操作者は簡単にROIマークを消去することができる。
【0085】
本実施形態において、入力装置13は、ぶれ補正の開始のタイミングを指定するボタン、即ちスタートボタン132bとフラッシュボタン132cを備えている。そのため、操作者は、所望のタイミングでぶれ補正を開始することができるから、被検体Pの症状や条件に最適な診断画像が得られる。
【0086】
さらに、本実施形態において、入力装置13は、ぶれ補正の実行期間を指定するトラックボールを備えている。そのため、操作者は、ぶれ補正が開始されてから所定時間が経過するまでの血流の環流の変化を繰り返し見ることができる。
【0087】
なお、本実施形態では、MFIについて述べているが、本発明は、これに限定されるものではない。即ち、本発明は、複数の画像データを重畳する技術であれば、例えば[背景技術]の欄で述べた「Panoramic imaging」にも適用可能である。
【0088】
また、本実施形態において、ROIの数とサイズは、入力装置13によって入力されているが、例えば、参照画像データに含まれるピクセルの輝度に基づいて自動設定されることもある。
【0089】
(同実施形態の変形例)
低音圧スキャンによって取得されて、既に画像メモリ30aに保存された複数の画像データに基づいてMFIが実行されることがある。この場合、基準画像データに先行する画像データもぶれ補正され、それによって取得された補正画像データも基準画像データに重畳される。即ち、基準画像データに先行する画像データに基づいて生成された補正画像データが基準画像データに重畳されることもある。このように、基準画像データに先行する画像データがぶれ補正されていれば、フレーム間のぶれによる影響が更に低減するから、診断画像の品質がさらに向上する。
【0090】
(同実施形態に変形例)
低音圧スキャンによって取得された複数の画像データの輝度に基づき、これら複数の画像データのぶれ補正に共通して使用可能なROIが設定されることがある。これは、低音圧スキャンによって取得されて、既に画像メモリ30aに保存された複数の画像データに基づいてMFIが実行される場合などに有効である。
【0091】
(同実施形態の変形例)
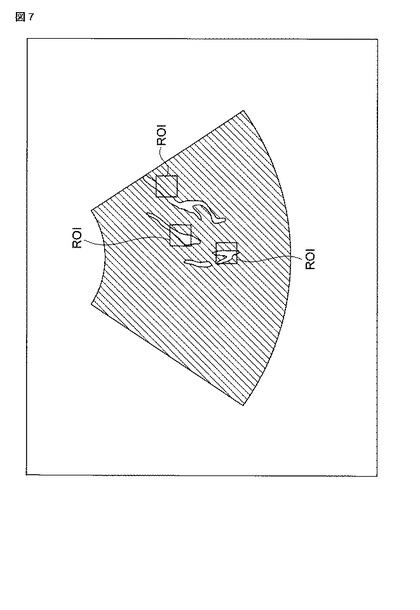
次に、図7を参照して、本実施形態の変形例について簡単に説明する。
【0092】
図7は同実施形態の変形例における3つのROIマークが重畳表示された診断画像の概略図である。
【0093】
図7に示すように、ROIが3つであれば、画像データのフレーム間における回転ぶれなどの補正も可能となる。しかも、これら3つのROIを合わせても、ROIの含まれるピクセル数は、画像データ全体のピクセル数に比べて非常に少ないから、従来のような画像データ全体のピクセルを使用して動きベクトルを生成する手法に比べて、計算量がかなり削減される。
【0094】
(同実施形態の変形例)
本実施形態の手法は、三次元画像データを用いた最大輝度保持演算を行う場合(すなわち、時系列なボリュームデータ間において、空間的位置が対応するボクセル同士の値を経時的に追跡し、最も大きな値を有するボクセルを採用して画像化する場合)にも有効である。係る場合には、検索領域、ROI条件を満たす画像領域、設定されるROIは全て三次元領域となり、各領域に含まれるボクセルの値を用いて既述のアルゴリズムを実行することで、ボリュームデータ間のぶれ補正を実現することができる。
【0095】
(同実施形態の変形例)
本実施形態に係るぶれ補正を利用したMFIにより生成された診断画像と、本実施形態に係るぶれ補正を利用しないMFIにより生成された診断画像とを、同時に(例えば並列的に、又は異なる色を割り当てて重畳的に)表示するようにしてもよい。また、ぶれ補正を利用した診断画像と利用しない診断画像とを選択的に表示可能としてもよい。この様な構成とすることで、より幅広い診断情報を提供することができ、また、従来より自由度の高い画像診断を実現することができる。
【0096】
(同実施形態の変形例)
本実施形態に係るぶれ補正において、太い血管の血流領域内にROIが設定されてしまうと、設定されたROI内がすべて高輝度領域となってしまうことがある。係る場合には、基準画像データに後行する各画像データ上で対応領域を特定することができず、移動ベクトルの計算を行うことができないことがある。
【0097】
係る不具合を解消するため、ぶれ補正において、造影剤バブルが染影された高輝度領域(例えば第1の閾値以上の輝度を有する領域)と造影剤バブルとは関係しない低輝度領域(例えば第2の閾値以下の輝度を有する領域)とを含むROIを基準画像データ(参照画像データ)上に設定するようにしてもよい。この様な構成によれば、ROI内の輝度分布パターンが高輝度によって一様になることはない。従って、基準画像データに後行するフレーム上においても適切にROIに対応する領域を特定することができ、好適なぶれ補正を実現することができる。
【0098】
(第2の実施形態)
次に、図面を参照することなく、第2の実施形態について説明する。
【0099】
本実施形態では、いったんROIが設定されても、それ以降に画像データが生成されるたびに、ROIの設定がなされる。即ち、ROIが設定されたあとで新たに画像データが生成されると、その直前の画像データが基準画像データに指定される。そして、新たに指定された基準画像データから参照画像データが生成され、当該参照データに基づいて、ROIの設定がなされる。
【0100】
ただし、ROIの設定シーケンスが作動するのは、最初にROIが設定されるときだけである。2回目以降にROIが設定される場合、その直前の画像データのぶれ補正に使用されたROIと、既に生成されている全ての動きベクトルの合成ベクトルとに基づき、ROIの再設定がなされる。なお、ここで述べる動きベクトルとは、画像データの連続する画像データ間の動きを表現するベクトルである。
【0101】
即ち、(n)フレーム目の画像データのぶれ補正に使用されるROIは、(n−1)フレーム目の画像データのぶれ補正で使用されたROIと、(n−1)フレームの画像データのぶれ補正までに生成された全ての動きベクトルの合成ベクトルとに基づいて設定される。
【0102】
(第3の実施形態)
次に、図8を参照して、第3の実施形態について説明する。
【0103】
本実施形態では、画像データが生成されるたびに、ROIの設定シーケンスが作動して、それぞれの画像データの輝度に基づいてROIの設定がなされる。なお、第2の実施形態において、ROIの設定シーケンスが作動するのは、最初にROIが設定されるときだけであった。したがって、いったんROIが設定されたら、それ以降のROIは、既存のROIと移動ベクトルに基づいて設定されていた。この点で、本実施形態は、第2の実施形態と大きく異なっている。
【0104】
図8は本発明の第3の実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。なお、図8において、白い部分は明るい領域を示し、斜線部分は暗い領域を示している。
【0105】
図8Aはフラッシュの瞬間の診断画像、図8Bはフラッシュ後における1フレーム目の診断画像、図8Cはフラッシュ後における2フレーム目の診断画像、図8Dはフラッシュ後における3フレーム目の診断画像、図8Eはフラッシュ後における4フレーム目の診断画像である。
【0106】
即ち、1枚目の診断画像はフラッシュ後に最初に生成された1フレーム目の画像データそのもの、2フレーム目の診断画像は画像データの1フレーム目と2フレーム目が重畳されたもの、3フレーム目の診断画像は画像データの1フレーム目〜3フレーム目が重畳されたもの、4フレーム目の診断画像は画像データの1フレーム目〜4フレーム目が重畳されたもの、5フレーム目の診断画像は画像データの1フレーム目〜5フレーム目が重畳されたものである。
【0107】
図8B〜図8Dに示すように、2フレーム目の診断画像〜4フレーム目の診断画像では、ROIが同じ位置に設定されている。これは、画像データの3フレーム目〜4フレーム目に基づいてROIの設定シーケンスが作動したものの、既存のROIより優良なROIが検出されなかったからである。しかしながら、図8Eに示すように、5フレーム目の診断画像では、新しくROIが設定されている。なお、実線で示されているのが新しいROIマークであって、点線で示されているのが消失したROIマークである。このように、ROIの位置が移動したのは、5フレーム目の画像データに基づいてROIの検索がなされた結果、既存のROIより優良なROIが検出されたからである。
【0108】
このように、画像データが生成されるたびに、ROIの設定シーケンスが作動すれば、常に動き補正が正確に実施されるから、高い画像品質の診断画像が安定して得られることになる。
【0109】
さらに、超音波プローブ11がレンズ方向に移動して、それまでぶれ補正の目印としていた血管(実際には造影剤バブルの染影部分)がスキャン面から消失しても、移動先で新たに最適なROIが設定されるから、超音波プローブ11のレンズ方向へ移動しても正確な動き補正が実行される。
【0110】
(第4の実施形態)
次に、図9、図10を参照して、第4の実施形態について説明する。
【0111】
超音波プローブが超音波走査面(又は超音波断層面、超音波画像面)に沿ってずれた場合には、第1乃至第3の実施形態で述べた手法により、当該ずれに起因する画像のぶれを好適に補正することができる。また、最大輝度値保持演算では複数の画像間で最も高い輝度値が選択され、一枚の画像に投影される。このため、超音波プローブが超音波走査面に垂直な方向(煽り方向)にずれた場合であっても、最大輝度値が投影された画像には、所望する断層位置に関する情報が含まれるため、臨床上問題はないと言える。
【0112】
その一方で、煽り方向に関するぶれを補正して、同一断面関する時系列な画像データを用いた最大輝度値保持演算を実現することも、臨床的価値は高いと考えれられる。そこで、本実施形態では、煽り方向に関するぶれを補正して、さらに好適なIMFを実現することができる超音波診断装置について説明する。
【0113】
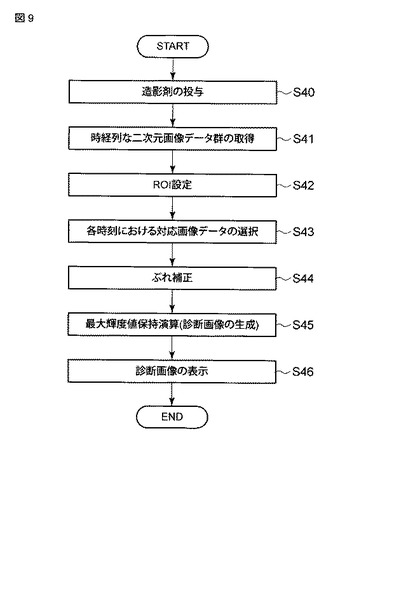
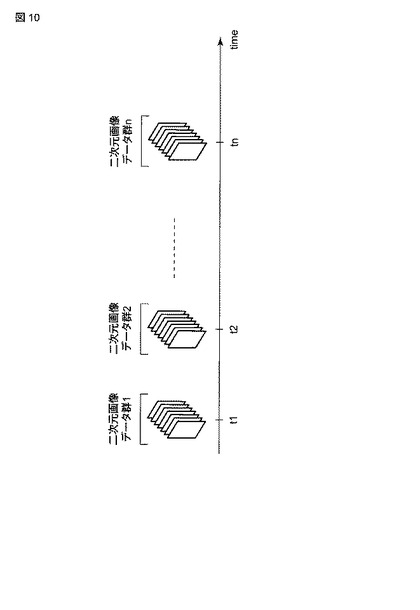
図9は、本実施形態に係るぶれ補正を含むMFIにおける処理の流れを示したフローチャートである。図9に示すように、まず被検体に対し造影剤が投与されると(ステップS40)、診断対象部位について、図10に示すような時系列な二次元画像データ群(ボリュームデータを構成してもしなくてもよい。)が取得される(ステップS41)。その後、例えば時刻t1の二次元画像データ群を用いて、基準画像データが指定されると共に既述のアルゴリズムに従ってぶれ補正のためのROIが設定される(ステップS42;図4参照)。
【0114】
次に、収集時刻の異なる二次元画像データ群の中から、基準画像データに対応する対応画像データを選択する(ステップS43)。すなわち、例えば、ステップS41において7フレーム分の二次元画像データ群が時系列で収集され、時刻t1に収集された二次元画像データ群の第4フレームの画像データを基準画像データとした場合を想定する。係る場合において、時刻t2において収集された二次元画像データ群2の第4フレームの画像データ、及びその前後数フレームのデータ(例えば、第3フレーム及び第5フレーム。)のうち、当該基準画像データと最も相関の高い画像データを判定し、対応画像データとして選択する。
【0115】
続いて、時刻t3において収集された二次元画像データ群3を用いて、同様の処理を行う。例えば、時刻t3において第3フレームの画像データが対応画像データとして選択されたとする。係る場合には、時刻t3において収集された二次元画像データ群2の第3フレームの画像データ、及びその前後数フレームのデータ(例えば、第2フレーム及び第4フレーム。)のうち、当該基準画像データと最も相関の高い画像データを判定し、対応画像データとして選択する。同様にして、他の時刻t4,・・・,tnで収集された各二次元画像データ群からも、対応画像データが選択される。
【0116】
なお、相関の判定手法には拘泥されない。例えば、パターンマッチング等の手法により、基準画像データと各画像との相関値を計算しその相関を判定することができる。また、各時刻における対応画像データの選択をリアルタイムで行う場合には、最新の対応画像データの空間的位置を中心として前後数フレーム分が収集されるように超音波走査領域を自動的に制御し、得られた二次元画像データ群を用いて同様の選択処理を行えばよい。
【0117】
次に、基準画像データ、及び各時刻における対応画像データを用いて、既述のぶれ補正が実行され(ステップS44)、最大輝度値保持演算により診断画像が生成される(ステップS45)。生成された診断画像は、所定の形態にてモニタ12に逐次動的又は静的に表示される(ステップS46)。
【0118】
以上述べた構成では、各時刻において収集された画像データ群の中から、基準画像データと最も相関の高いものを対応画像データとして選択し、これを用いてぶれ補正を行っている。そのため、例えば超音波プローブの煽り方向に関する位置ずれに起因して、基準画像データの位置が煽り方向に移動した場合であっても、移動前の基準画像データの位置に最も近い画像を対応画像として選択することができる。従って、対応画像を用いて第1乃至第3の実施形態のいずれかにおいて説明したぶれ補正を実行することで、同一断面関する時系列な画像データを用いた最大輝度値保持演算を実現することができる。
【0119】
(第5の実施形態)
次に、本発明の第5の実施形態について説明する。本実施形態は、動きベクトルを生成するときに指標となる相関量Sを計算し、これに基づいてぶれ補正(動き補正)を行うものである。なお、本実施形態に係る超音波診断装置は、図1に示した構成と実質的に同一である。従って、機能の異なる構成要素のみ以下説明する。
【0120】
制御プロセッサ25は、画像データ上に検索領域を作成して、これを画像データ全体にわたり移動させつつ、その内側に含まれるピクセルの輝度を検出する。そして、制御プロセッサ25は、検索領域の内側に含まれるピクセルの輝度に基づき、画像データ上にROIを設定する。さらに、制御プロセッサ25は、複数の画像データのROIに含まれる複数のピクセルの輝度に基づき、相関量Sを算出するとともに、得られた複数の相関量Sに基づき、画像データ間の動きを表現する動きベクトルを生成する。そして、制御プロセッサ25は、得られた動きベクトルに基づき、画像データを動き補正する。
【0121】
次に、本実施形態に係る動き検出モードについて説明する。
【0122】
まず、図4に示したステップS1乃至S4までの各処理が順次実行され、ROIの条件を満たす画像領域が検索される。ROIの条件を満たす画像領域が発見されると、その中から、輝度がK以上のピクセルが最も多かった画像領域が特定され、その画像領域にROIが設定される。以上で、ROIの設定シーケンスが終了となる。なお、設定されたROIは、図11に示すように、矩形枠状のROIマークとして、モニタ12に表示される診断画像に重畳される。
【0123】
一方、検索領域が参照画像データ上を全体にわたって移動しても、ROIの条件を満たす画像領域が発見されなかった場合、ROIの設定シーケンスが終了となる。このように、ROIの条件を満たす画像領域が発見されずにROIの設定シーケンスが終了した場合、続いて生成される画像データが基準画像データに指定され、再度ROIの検索シーケンスが実行される。こうして、ROIが設定されるまで、ROIの設定シーケンスは繰り返される。
【0124】
なお、本実施形態において、ROIは、自動的に設定されているが、本発明は、これに限定されるものではなく、トラックボール入力部131などのマニュアル操作によって設定されることもある。
【0125】
以上の手続を経て、ROIが設定されたら、その直後の画像データが対象画像データに指定される。対象画像データは、生成された時点での位置を基準として、X軸方向とY軸方向にピクセル単位で動かされる。そして、対象画像データが1ピクセル分だけ動くたびに、基準画像データのROIに含まれるピクセルの輝度I(X、Y)と、対象画像データのROIに含まれるピクセルの輝度I´(X、Y)とが抽出され、以下の[数1]に代入される。こうして、対象画像データの移動回数と同じだけの相関数Sが算出される。
【0126】
そして、事前に決められた移動回数分の相関量Sが得られたら、その中から最も小さな相関量Sが検索され、これに対応する対象画像データの移動量および移動方向が特定される。そして、特定された移動量および移動方向に基づき、対象画像データの動きベクトルが求められる。なお、求められた動きベクトルは、対応する対象画像データと対応づけられて、画像メモリ30aに保存される。
【0127】
こうして、対象画像データの動きベクトルが求められたら、当該動きベクトルに基づき、対象画像データの表示位置が補正される。これにより、基準画像データに対して殆んどぶれが存在しない補正画像データが生成される。補正画像データは、最大輝度値保持演算によって基準画像データに重畳され、重畳画像データが生成される。
【0128】
一方、既に重畳画像データが生成されている場合、新たに生成される画像データが対象画像データに指定される。対象画像データは、生成された時点での位置を基準として、X軸方向とY軸方向にピクセル単位で動かされる。そして、対象画像データが1ピクセル分だけ動くたびに、既に生成されている重畳画像データのROIに含まれるピクセルの輝度I(X、Y)と、対象画像データのROIに含まれるピクセルの輝度I´(X、Y)とが抽出され、以下の[数1]に代入される。こうして、対象画像データの移動回数と同じだけの相関数Sが求められる。
【0129】
そして、事前に決められた移動回数分の相関量Sが得られたら、その中から最も小さなものが検索され、これに対応する対象画像データの移動量および移動方向が特定される。そして、特定された移動量および移動方向に基づき、対象画像データの動きベクトルが求められる。なお、求められた動きベクトルは、対応する対象画像データと対応づけられて、画像メモリ30aに保存される。
【0130】
こうして、対象画像データの動きベクトルが求められたら、当該動きベクトルに基づき、対象画像データの表示位置が補正される。これにより、既に生成されている重畳画像データに対して殆んどぶれが存在しない補正画像データが生成される。補正画像データは、最大輝度値保持演算によって重畳画像データに重畳される。以上のような手続によって、重畳画像データが逐次更新される。
【0131】
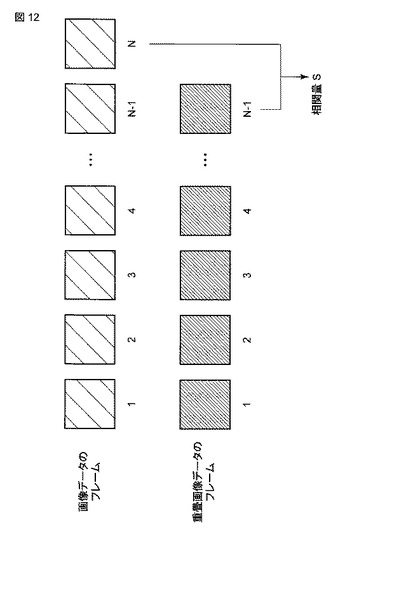
相関量Sは、以下の[数1]によって算出される。
【数1】

【0132】
[数1]において、符号Nは、画像データのフレーム番号である。なお、図12に示すように、画像データの1フレーム目が重畳画像データの1フレーム目として扱われている。従って、重畳画像データのN−1フレーム目は、画像データの1フレーム目(基準画像データ)に、2フレーム目からN−1フレーム目までが重畳されたものである。
【0133】
[数1]を見ると、本実施形態で使用される相関量Sは、重畳画像データに、新たに生成される画像データ、即ち対象画像データが重畳されるときの輝度増加量の総和であることがわかる。
【0134】
以上のように、動き検出モードの作動中にスタートボタン132bがONにされると、それ以降に生成される画像データは、次々と補正され、補正画像データが生成される。これらの補正画像データは、生成されるたびに、最大輝度値保持演算によって、重畳画像データに重畳される。
【0135】
したがって、補正画像データの重畳が実行されている期間は、スキャン面に被検体Pの血管構造が描出される。しかも、重畳される補正画像データは、事前の処理によって、動き補正されているから、モニタ12に表示される診断画像は非常に鮮明なものとなる。したがって、被検体Pの動きの影響や超音波プローブ11を把持する手ぶれの影響が無い、非常に鮮明な診断画像が取得される。
【0136】
なお、本実施形態では、低音圧スキャンの実行中にスタートボタン132bが押されたケースだけが説明されているが、フラッシュ直後における動き補正もこれと同等である。したがって、ここでは説明を省略することとする。
【0137】
(本実施形態による作用)
本実施形態では、動きベクトルを生成するときに指標となる相関量Sとして、重畳画像データに、新たに生成された画像データが重畳されたときの輝度増加量の総和が採用されている。そのため、造影剤バブルの染影が非定常的に点滅していても、これらの染影が持続されるものとして、動きベクトルが生成される。その結果、MFIが実施されるときも、対象画像データの動きベクトルの精度が向上するから、非常に鮮明な診断画像が得られる。
【0138】
本実施形態において、ROIは、造影剤バブルの染影が密集する太い血管を含む領域に設定される。そのため、例えばフラッシュ直後のように、動き補正の目印となる領域があまり存在しない場合であっても、重畳画像データのROIと、新たに生成される画像データとの相関が得られやすい。
【0139】
本実施形態において、ROIに含まれるピクセル数は、画像データの全ピクセル数よりも少ない。そのため、重畳画像データのROIと、対象画像データのROIとの相関量Sを求めるのに必要な計算量が非常に少なくなる。
【0140】
本実施形態において、モニタ12は、診断画像にROIマークを重畳表示する。そのため、操作者は、モニタ12に表示された診断画像から、ROIの設定が適正であるか確認することができる。
【0141】
本実施形態において、ROIが設定された場合にだけ、動き補正のシーケンスが始動する。そのため、動き補正の目印となる領域が存在しなときには、対象画像データが補正されることがない。
【0142】
本実施形態において、動きベクトルは、対象画像データと対応づけられて、画像メモリ30aに保存される。そのため、既に画像メモリ30aに記憶された画像データに基づき、重畳画像データを再構築する場合に、動きベクトルを生成する必要が無いから、少ない計算量で鮮明な診断画像が生成される。
【0143】
なお、本実施形態では、MFIについて述べているが、本発明は、これに限定されるものではない。即ち、本発明は、複数の画像データを重畳する技術であれば、例えば[背景技術]の欄で述べた「Panoramic imaging」にも適用可能である。
【0144】
また、本実施形態において、ROIの数とサイズは、入力装置13によって入力されているが、例えば、参照画像データに含まれるピクセルの輝度に基づいて自動設定されることもある。
【0145】
さらに、本実施形態において、ROIは、参照画像データの輝度に基づき、自動的に設定されているが、例えば、送受信ユニット21によって送信される超音波のフォーカス点に連動して設定されても良いし、操作者からの指示に従って設定されても良い。
【0146】
また、本実施形態において、動きベクトルは、対象画像データと対応づけられて、画像メモリ30aに保存されているが、例えば、補正画像データそのものが画像メモリ30aに保存されることもある。こうすれば、対象画像データを補正する必要が無いから、非常に少ない計算量で鮮明な診断画像が生成される。
【0147】
(第6の実施形態)
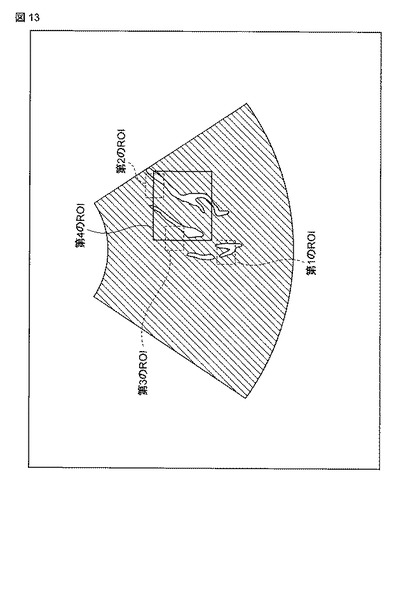
次に、図13を参照して、本発明の第6の実施形態について説明する。図13は本発明の第6の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【0148】
本実施形態において、制御プロセッサ25は、図13に示すように、参照画像データ上に第1〜第4のROIを設定する。なお、第4のROIは、第5の実施形態におけるROIに相当するものである。従って、本実施形態において、制御プロセッサ25は、第5の実施形態におけるROIのほかに、第1〜第3のROIを設定することになる。なお、第1〜第3のROIは、第4のROIよりもサイズが小さい。
【0149】
第1〜第4のROIが設定されたら、重畳画像データの第1〜第3のROIと、対象画像データの第1〜第3のROIとの相関量S´に基づき、それぞれ対象画像データの動きを表現する第1〜第3の動きベクトルが求められる。なお、本実施形態では、相関量S´として、SADが使用されている。
【0150】
こうして、第1〜第3のベクトルが求められたら、これら第1〜第3のベクトルに従い、対象画像データが動かされる。そして、対象画像データが動くたびに、重畳画像データの第4のROIと、対象画像データの第4のROIとに基づき、第5の実施形態と同じ要領で、即ち前述の[数1]に従って、それぞれ第1〜第3の相関量Sが算出される。
【0151】
そして、第1〜第3の相関量Sが算出されたら、その中から最も小さな相関量Sが検出され、これに対応する対象画像データのベクトルが動きベクトルとして採用される。そして、採用された動きベクトルに従い、対象画像データの表示位置が補正される。
【0152】
以上のように、本実施形態では、事前に取得された第1〜第3のベクトルから、動きベクトルが選択される。即ち、動きベクトルの生成に必要な計算([数1]を使用して実行される計算)が3通りで済む。従って、第5の実施形態に比べて、動きベクトルを求めるために必要な計算量が飛躍的に減ることになる。さらに、被検体の部位によって動きベクトルにばらつきがあるような場合でも、動きベクトルの精度が極端に低下することがない。
【0153】
なお、本実施形態における相関量S´は、いわゆるSADであるが、本発明は、これに限定されるものではない。即ち、相関量S´は、[数1]によって算出されても構わない。たとえ[数1]が使用されたとしても、第1〜第3のROIは、第4のROIに比べて小さいので、計算量が低減することになる。
【0154】
さらに、本実施形態において、動きベクトルは、事前に取得された第1〜第3のベクトルに基づき、[数1]に従って求められているが、本発明は、これに限定されるものではなく、例えば、第1〜第3の動きベクトルの平均値や最頻値であっても良い。平均値や最頻値が採用されたら、必要な計算量は、さらに低減することになる。
【0155】
(第7の実施形態)
本実施形態では、第6の実施形態において使用された第1〜第3のベクトルのほかに、さらに零ベクトルが追加されている。即ち、本実施形態では、対象画像データが動かない場合についても、基準画像データの第4のROIもしくは既に生成されている重畳画像データの第4のROIと、対象画像データの第4のROIとに基づき、第5の実施形態と同じ要領で、即ち[数1]に従って、第4の相関量Sが算出される。
【0156】
そして、第1〜第4の相関量Sが算出されたら、その中から最も小さな相関量Sが検出され、これに対応する対象画像データのベクトルが動きベクトルとして採用される。そして、採用された動きベクトルに従い、対象画像データの表示位置が補正される。
【0157】
以上のように、本実施形態では、対象画像データが動かない場合についても、[数1]に従って、第4の相関量Sが算出されている。そのため、超音波プローブ11がレンズ方向に傾き、第1〜第3のベクトルが異常な値となっても、実際の補正に使用される動きベクトルの精度が極端に低下することがない。
【0158】
(第8の実施形態)
本実施形態では、3次元の画像データを生成することが想定されている。そのため、参照画像データ上には、3次元のROIが設定される。しかしながら、ROIが3次元となると、相関量Sを求めるための計算量は猛烈に増加する。
【0159】
そこで、本実施形態では、3次元のROIの代わりに、2次元の第1〜第3のROIが使用される。第1〜第3のROIは、3次元のROIに含まれ且つ互いに直交していて、前述した3次元のROIのMPRとして生成される。なお、本実施形態における第1〜第3のROIは、第6、第7の実施形態における第1〜第3のROIとは異なるものである。
【0160】
第1〜第3のROIが生成されたら、第5の実施形態と同じ要領で、これら第1〜第3のROIに対応する第1〜第3のベクトルが生成される。なお、本実施形態における第1〜第3のベクトルは、第6、第7の実施形態における第1〜第3のベクトルとは異なるものである。
【0161】
そして、第1〜第3のベクトルが生成されたら、これら第1〜第3のベクトルに基づき、対象画像データの動き補正をするときに実際に使用される3次元の動きベクトルが生成される。
【0162】
以上のように、本実施形態では、3次元のROIの代わりに、2次元の第1〜第3のROIが使用される。そのため、3次元の画像データを生成する場合であっても、相関量Sを求めるのに必要な計算量が飛躍的に低減する。
【0163】
なお、本実施形態では、第1〜第3のベクトルに基づき、3次元の動きベクトルが生成された上で、対象画像データが補正されている。しかしながら、本発明は、これに限定されるものではい。例えば、第1〜第3のベクトルごとに、対象画像データが補正されても良い。こうすれば、補正回数は3回となるものの、動きベクトルを生成する必要がなくなる。
【0164】
(第9の実施形態)
本実施形態において、制御プロセッサ25は、重畳画像データのROIに含まれるピクセルの輝度の総和を検出していて、当該輝度の総和が規定値を超えた場合に、対象画像データの動き補正を中止する。従って、多数の画像データが重畳されて、重畳画像データのROIが明るくなり過ぎても、動きベクトルの精度が極端に低下することがない。
【0165】
(第10の実施形態)
本実施形態では、血流画像データと組織画像データが並べて表示されることが想定されている。なお、血流画像データは、前述の各実施形態における画像データに相当する。組織画像データは、血流画像データのように経時的に変化しない。そのため、動きベクトルの計算が容易である。そこで、本実施形態では、組織画像データにROIが設定され、第1の実施形態と同じ要領で、即ち[数1]に従い、動きベクトルが生成される。そして、生成された動きベクトルに基づき、血流画像データだけが動き補正される。
【0166】
本実施形態のように、組織画像データに設定されたROIに基づき、血流画像データが動き補正されると、さらに鮮明な診断画像を得られる。また、本実施形態では、組織画像データは、補正されずに、そのままモニタ12に表示される。そのため、操作者は、モニタ12に表示される組織画像データによって、動き量を確認しやすく、しかも、被検体Pの様子を視認できることによって、安心して診断を実施することができる。
【0167】
(第11の実施形態)
図14、図15、図16、図17は本発明の第11の実施形態における診断画像の重畳される補正結果の概略図である。本実施形態において、対象画像データの補正結果は、診断画像上に重畳される。補正結果の表示形態としては、図14、図15、図16、図17に示すように、幾つかのタイプがある。
【0168】
図14に示すタイプでは、対象画像データの補正結果として、対象画像データの動きベクトルVだけが表示される。そのため、ある瞬間の対象画像データの補正結果が非常にわかり易い。図15に示すタイプでは、対象画像データの補正結果として、動きベクトルVの終点の軌跡Lが表示される。そのため、時間経過に伴う動きベクトルVの変遷が非常にわかりやすい。図16に示すタイプでは、図14と同様に、対象画像データの補正結果として、順次生成される複数の動きベクトルVが表示されるが、X軸とY軸のほかに、時間軸tが追加されている。図17に示すタイプは、3次元のボリュームデータの補正結果を表示するものであって、図14と同様に、対象画像データの動きベクトルVだけが表示される。
【0169】
以上のように、モニタ12に表示される診断画像に補正結果が表示されると、操作者は、補正結果を認識しやすいばかりか、安心して補正機能を使用することができる。
【0170】
(第12の実施形態)
本実施形態では、取得された動きベクトルの応用例に関するものである。取得された動きベクトルは、例えば、パルスウェーブにおけるレンジゲートを動かすために使用される。この場合、パルスウェーブドプラのレンジゲートが所望の血管部分に設定されると、被検体Pや超音波プローブ11が多少動いても、所望の血管部分からの信号を継続的に取得することが可能となる。なお、動きベクトルは、パルスウェーブドプラのレンジゲートだけでなく、カラーROIの位置補正や、被検体の同一断面の保持、輝度解析ソフトウェアの関心領域追従のために使用されることもある。
【0171】
逆に、パルスウェーブのレンジゲートやカラーROIの位置を固定して、背景画像を補正すれば、操作者の関心領域を外すことなく観察することができる。これらは、特に、輝度の時間変化を観察する場合や、その他の解析画像に非常に有用である。
【0172】
本発明は、前記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、前記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0173】
12…モニタ、21…送受信ユニット、24…画像生成回路、25…制御プロセッサ、131a…数指定用トラックボール、131b…サイズ指定用トラックボール、132b…スタートボタン、132c…フラッシュボタン、ROI…関心領域。
【技術分野】
【0001】
被検体の動きや超音波プローブを把持する操作者の手ぶれの影響を補正する機能を備えた超音波診断装置に関する。
【背景技術】
【0002】
近年、超音波診断に使用される、静脈投与型の超音波造影剤が製品化され、「造影エコー法」が行われるようになってきている。造影エコー法は、静脈から超音波造影剤を注入して血流信号を増強して、心臓や肝臓などの血流動態を評価するものである。造影剤の多くは、微小気泡(造影剤バブル)が反射源として機能するものである。バブルというデリケートな基材の性質上、通常の診断レベルの超音波送信であっても、その機械的作用によりバブルが壊れ、結果的にスキャン面からの信号強度が低下する。したがって、還流の動的な様子をリアルタイムで観察するためには、低音圧の超音波送信により映像化するなど、スキャンによるバブルの崩壊を低減させることが必要となる。
【0003】
また、バブルが崩壊するという性質を生かして、以下のような手法も開発されている。即ち、A低音圧の超音波を送信してスキャン面に充満していくバブルの動態を観察し、B超音波の音圧を高音圧に切り替えてスキャン面内(厳密には照射体積内)のバブルを崩壊させ、C再び超音波の音圧を低音圧に切り替えてスキャン面内に流入していくバブルの様子を観察する、という手法である。この手法は「Replenishment(再環流)」法と呼ばれている(例えば、特許文献1参照)。
【0004】
ところで、造影剤バブルの特徴は、カラードプラでは映像化できない微小血流を映像化できる点にある。しかしながら、微小血流内には少数のバブルしか存在しないため、染影は非定常的である。そこで、非定常的に現れる造影剤バブルの染影を重畳して、微小血流の構造を明瞭に映像化する手法が開発された。この手法は、「Micro flow imaging(MFIとする)」と呼ばれている(例えば、特許文献2参照。)。
【0005】
MFIの実施にあたっては、生成される複数フレーム分の超音波画像を重畳させる必要があることから、被検体は一定時間にわたって息を止め、また操作者は一定時間にわたって超音波プローブを固定する必要がある。
【0006】
しかしながら、被検体にとって一定時間にわたり息を止めることは容易なことではないし、MFIに慣れていない操作者にとって、一定時間にわたり超音波プローブを固定することは容易なことではない。したがって、MFIにおいて画像品質を高めるためには、超音波画像のぶれ補正が非常に有効となる。
【0007】
ところで、動画像のような連続する複数フレームの画像をぶれ補正する技術は、既に市販のビデオカメラなどにも搭載されている。代表的な手法としては、画像データのフレーム間の相対的な動きベクトルを算出する手法がある。この手法では、1フレーム分の画像データが複数の領域に分けられ、それぞれの領域における画像データ間の相関から、領域ごとにフレーム間の動きベクトルが求められる。このように領域ごとに算出された複数の動きベクトルを使用して、画像データの表示位置を補正すれば、カメラを持つ手が多少ぶれても、被写体の表示位置は変化せず、動画像の視認性が向上する。
【0008】
超音波診断のぶれ補正と類似する技術として、「Panoramic imaging」と呼ばれる技術が知られている。これは、超音波プローブを少しずつ移動させながら複数フレーム分の超音波画像を取得して、これらを超音波画像における、互いに重複する部分をうまく繋ぎ合わせることで、パノラマ写真のような広範囲の静止画像を構成する技術である。この「Panoramic imaging」では、複数フレーム分の超音波画像における、互いに重複する部分を繋ぎ合わせる必要があることから、超音波画像の場合と同様にフレーム間の相対的な動きベクトルが必要となる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平11−155858号公報
【特許文献2】特開2004−321688号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、通常の断層画像、即ち造影剤が投与されていない被検体から生成された超音波画像をぶれ補正することは比較的容易である。それは、通常の断層画像には、動きベクトルを検出する際に目印となる組織や骨などが映り込んでいるからである。
【0011】
しかしながら、造影画像、即ち造影剤が投与された被検体からの超音波画像は、バブルの染影が非定常的であるため、通常の超音波画像におけるぶれ補正の技術をそのまま適用することはできない。特にMFIにおいては、高音圧の超音波によってバブルを一掃してから再環流を映像化するため、バブルを一掃した直後に生成される画像には、ぶれ補正のための目印がほとんど存在しない。しかも、バブルを一掃した直後に生成される画像では、映像化されたバブルの様子が刻々と変化するため、従来の方法では、動きベクトルを抽出することが困難であった。
【0012】
本発明は、上記事情を鑑みてなされたもので、被検体や超音波プローブが多少ぶれても、画質が低下することがない超音波診断装置を提供することを目的としている。
【課題を解決するための手段】
【0013】
本実施形態に係る超音波診断装置は、造影剤が投与された被検体へ超音波を送信し超音波走査することにより、前記被検体の超音波画像を取得する超音波診断装置であって、前記超音波走査によりエコー信号を取得する送受信ユニットと、前記エコー信号に基づき前記造影剤が映像化された複数の画像データを生成する画像データ生成ユニットと、前記複数の画像データのうち第1の画像データに対して、画像領域全体より小さな関心領域を設定する設定ユニットと、前記第1の画像データと異なる第2の画像データに対して、前記関心領域に対応する位置を検出することにより、前記第1及び第2の画像データとの間の動き補正を行う画像補正ユニットと、前記動き補正後の画像データへ輝度値保持演算を施して表示画像を生成する画像生成ユニットと、を具備する。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の第1の実施形態における超音波診断装置のブロック図である。
【図2】図2は、第1の実施形態における各種トラックボールの概略図である。
【図3】図3は、第1の実施形態における各種ボタンの概略図である。
【図4】図4は、第1の実施形態における超音波診断装置によって実行される処理手順のフローチャートである。
【図5】図5は、第1の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【図6】図6(A)、図6(B)、図6(C)、図6(D)、図6(E)は、第1の実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。
【図7】図7は、第1の実施形態の変形例における3つのROIマークが重畳表示された診断画像の概略図である。
【図8】図8(A)、図8(B)、図8(C)、図8(D)、図8(E)は、本発明の第3の実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。
【図9】図9は、第4の実施形態に係るぶれ補正を含むMFIにおける処理の流れを示したフローチャートである。
【図10】図10は、第4の実施形態に係るぶれ補正を説明するための図である。
【図11】図11は、第5の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【図12】図12は、第5の実施形態における相関量の算出方法の説明図である。
【図13】図13は、第6の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【図14】図14は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【図15】図15は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【図16】図16は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【図17】図17は、第11の実施形態における診断画像の重畳される補正結果の一例としての概略図である。
【発明を実施するための形態】
【0015】
以下、図面を参照しながら、第1の実施形態乃至第12の実施形態について説明する。
(第1の実施形態)
先ず、図1〜図6を参照して、第1の実施形態について説明する。
[超音波診断装置の構成]
図1は本発明の第1の実施形態における超音波診断装置のブロック図である。
【0016】
図1に示すように、本実施形態における超音波診断装置は、装置本体10、超音波プローブ11、モニタ12、及び入力装置13を具備している。
【0017】
装置本体10は、送受信ユニット21、Bモード処理ユニット22、ドプラ処理ユニット23、画像生成回路24、制御プロセッサ25、内部記憶装置26、インターフェース29、及び画像メモリ30aとソフトウェア格納部30bを有する記憶部30を具備している。
【0018】
なお、装置本体10に内蔵される送受信ユニット21などは、集積回路などのハードウェアで構成されることもあるが、ソフトウェア的にモジュール化されたソフトウェアプログラムである場合もある。以下、個々の構成要について説明する。
【0019】
超音波プローブ11は、被検体Pの検査部位に超音波を送受信するものであって、その内部には、超音波を送受信するための圧電振動子が配置されている。この圧電振動子は、複数の素子に分割されていて、それぞれの素子がいわゆるチャンネルの一部を構成している。なお、超音波プローブ11が2Dアレイ振動子を備えていれば、三次元データの取得も可能である。
【0020】
超音波プローブ11から被検体Pに送信された超音波(以下、「送信超音波」とする。)は、体内組織の音響インピーダンスの不連続面で次々と反射され、エコー信号として超音波プローブ11に受信される。エコー信号の振幅は、反射することになった不連続面における音響インピーダンスの差に依存する。また、送信超音波が血流や心臓壁などの移動体の表面で反射した場合、エコー信号は、ドプラ効果によって、移動体における超音波の送信方向の速度成分に依存して周波数偏移を受ける。
【0021】
モニタ12は、画像生成回路24からのビデオ信号に基づき、被検体P内の形態学的情報や血流情報などを診断画像として表示する。また、モニタ12は、ROIマークを診断画像上に重畳表示する。
【0022】
入力装置13は、装置本体10に接続されていて、オペレータからの指示を装置本体10に取り込むための、各種トラックボール入力部131、各種ボタン入力部132、及び各種スイッチ入力部133などを有している。
【0023】
図2は同実施形態におけるトラックボール入力部131の概略図である。
【0024】
図2に示すように、トラックボール入力部131は、ROIの数の指定に使用される数指定用トラックボール131aと、ROIのサイズの指定に使用されるサイズ指定用トラックボール131bとを備えている。
【0025】
図3は同実施形態におけるボタン入力部132の概略図である。
【0026】
図3に示すように、ボタン入力部132は、動き検出および動き補正の開始と終了の指示に使用されるオートアジャストボタン132aと、画像データの重畳の開始と終了の指示に使用されるスタートボタン132bと、高音圧スキャンの実行の指示に使用されるフラッシュボタン132cと、低音圧スキャンの停止の指示に使用されるフリーズボタン132dとを備えている。
【0027】
なお、オペレータからの指示には、この他に、ROIの形状の指定、低音圧スキャンの実行時間の指定、ぶれ補正の実行時間の指定、ROIマークの表示と非表示の指示なども存在する。したがって、入力装置13は、トラックボール131a〜131b、及びボタン132a〜132cの他に、それぞれの指示に対応するトラックボール、ボタン、スイッチなどを備えている。
【0028】
送受信ユニット21は、パルサ回路、遅延回路、及びトリガ発生回路を具備している。パルサ回路は、所定のレート周波数で送信超音波を形成するためのレートパルスを繰り返し発生する。遅延回路は、各レートパルスに対して、チャンネルごとに送信超音波をビーム状に収束して且つ送信指向性を決定するのに必要な遅延時間を与える。超音波プローブ11からの超音波の送信方向は、遅延回路により与えられる遅延時間の調整によって制御される。トリガ発生回路は、遅延時間が調整されたレートパルスに基づき、所定のタイミングで超音波プローブ11に駆動パルスを印加する。
【0029】
なお、送受信ユニット21は、制御プロセッサ25からの指示に従って、遅延情報、送信周波数、送信駆動電圧などを瞬時に変更可能な機能を具備している。特に送信駆動電圧の変更については、瞬間にその値を切り替えることが可能なリニアアンプ型の発信回路、または複数の電源ユニットを電気的に切り替える機構によって実現される。
【0030】
さらに、送受信ユニット21は、アンプ回路、A/D変換器、及び加算器を具備している。アンプ回路は、超音波プローブ11から取り込まれたエコー信号をチャンネルごとに増幅する。A/D変換器は、チャンネルごとに増幅されたエコー信号に対して、超音波の受信指向性を決定するのに必要な遅延時間を与える。加算器は、チャンネルごとに遅延時間が与えられたエコー信号を加算して受信信号を生成する。これにより、エコー信号の受信指向性に応じた方向からの反射成分が強調される。
【0031】
Bモード処理ユニット22は、送受信ユニット21から出力される受信信号に対して、対数増幅、法絡線検波処理などを実行して、受信信号の信号強度が輝度の明るさで表現される強度データを生成する。
【0032】
ドプラ処理ユニット23は、送受信ユニット21から出力される受信信号に基づき、血流、組織、及び造影剤バブルなどの速度情報を算出して、平均速度、分散、及びパワー、及びこれらの組み合わせなどの血流データを生成する。
【0033】
画像生成回路24は、Bモード処理ユニット22やドプラ処理ユニット23から出力される強度データや血流データを座標変換して、テレビなどに代表されるビデオフォーマットの走査線信号列にする。これにより、被検体Pの組織形状に関する断層画像、血管内を流れる造影剤バブルが特に強調された造影画像、及び血流の速度に関する平均速度画像、分散画像、パワー画像、これらの組み合わせ画像などが生成される。また、画像生成回路24は、画像データを格納する記憶メモリを具備している。これにより、操作者は、検査中に記録された画像を診断後に呼び出すことが可能となっている。
【0034】
制御プロセッサ25(CPU)は、情報処理装置としての機能を具備し、本超音波診断装置の各部を制御する。制御プロセッサ25は、内部記憶装置26から画像生成や画像表示などを実行するための制御プログラムを読み出し、これをソフトウェア格納部30b上に展開して、各種処理に関する演算・制御などを実行する。
【0035】
また、制御プロセッサ25は、画像データ上に検索領域を作成して、その内側に含まれるピクセルの輝度を検出する。さらに、制御プロセッサ25は、複数の画像データのROIに含まれる複数のピクセルの輝度に基づき、これら画像データ間の動きを表現する動きベクトルを生成する。
【0036】
内部記憶装置26は、画像生成や表示処理を実行するための制御プログラムや、診断情報(ID、医師の所見など)、診断プロトコル、送受信条件、その他のデータ群を保管している。特に、内部記憶装置26は、超音波を送受信するためのスキャンシーケンス、ROIの設定、ぶれ補正、差分画像生成処理、輝度血保持演算処理、重畳表示などを実行するための制御プログラムを保管している。さらに、内部記憶装置26は、必要に応じて、画像メモリ30a中の画像データの保管などにも使用される。内部記憶装置26のデータは、インターフェース29を経由して外部周辺装置へ転送することも可能となっている。
【0037】
インターフェース29は、入力装置13、ネットワーク、及び新たな外部記憶装置に関するインターフェースである。取得された超音波画像などのデータや解析結果などは、このインターフェース29によってネットワークを通じて他の装置に転送されることもある。
【0038】
画像メモリ30aは、画像生成回路24から出力された画像データを格納する記憶メモリからなる。記憶メモリに格納された画像データは、例えば診断後に操作者が呼び出すことが可能となっていて、静止画的に、あるいは複数フレーム分を使用して動画的に再生されることもある。また、画像メモリ30aは、送受信ユニット21直後の出力信号(radio frequency信号と呼ばれる。)、送受信ユニット21通過後の輝度信号、その他の生データ、ネットワークを通じて取得された画像データなどを必要に応じて記憶する。
【0039】
[超音波診断装置の使用方法]
最初に、数指定用トラックボール131aとサイズ指定用トラックボール131bの操作によって、ROIの数とサイズが指定される。なお、本実施形態において、ROIの形状は、事前に長方形状に設定されているが、トラックボールなどの操作によって指定されることもある。
【0040】
次に、低音圧スキャンが開始される。この低音圧スキャンは、血流の環流を画像化するためのものであって、何度も繰り返して実行される。なお、ROIの数とサイズの設定前から低音圧スキャンが開始されていることもある。
【0041】
低音圧スキャンで使用される超音波は、造影剤バブルが崩壊しない程度の低い音圧に設定されている。したがって、低音圧スキャンが実行されるたびに、造影剤バブルの染影が描出された1フレーム分の画像データが生成される。これらの画像データは、生成されるたびに画像メモリ30aに保存され、同時にモニタ12に表示される。
【0042】
低音圧スキャンの実行中にスタートボタン132bがONにされると、それ以降に生成される画像データが重畳され、1枚の重畳画像データが生成される。画像データの重畳手法としては、最大輝度値保持演算が使用される。この最大輝度値保持演算は、複数フレーム分の画像データを使用して、空間的に対応する複数ピクセルの中で輝度が最も高いピクセルを採用して画像化する手法である。したがって、最大輝度値保持演算が実行されると、それぞれの画像データに描出された造影剤バブルの染影が連結され、結果として、重畳画像データに被検体Pの血管構造が描出される。この重畳画像データは、診断画像としてモニタ12に表示される。即ち、低音圧スキャンの実行中にスタートボタン132bがONにされると、MFIが開始される。
【0043】
画像データの重畳中にスタートボタン132bがOFFにされると、それまで実行されていた画像データの重畳が停止され、再び低音圧スキャンごとに生成される画像データがモニタ12に表示される。
【0044】
低音圧スキャンの実行中にフラッシュボタン132cがONにされると、高音圧スキャンが1フレーム分だけ実行される。この高音圧スキャンは、「フラッシュ」と呼ばれることもある。
【0045】
高音圧スキャンで使用される超音波は、造影剤バブルが崩壊する程度の高い音圧に設定されている。したがって、高音圧スキャンが実行されると、スキャン面に存在する全ての造影剤バブルが破壊され、モニタ12に表示される診断画像から造影剤バブルによる染影が消失する。これにより、モニタ12には真っ暗な様子が表示される。しかしながら、真っ暗な状態は、長期間にわたって継続するわけではなく、ある程度の時間が経過すると、太い血管から徐々に造影剤バブルの染影がはじまる。
【0046】
低音圧スキャンの実行中にフリーズボタン132dがONにされると、当該低音圧スキャンが停止される。このとき、画像データの重畳や動き検出モードが作動していれば、これらも同時に停止される。
【0047】
低音圧スキャンの実行中にオートアジャストボタン132aがONにされると、動き検出モードが開始される。動き検出モードは、動き検出におけるスタンバイモードであって、実際に何らかの処理が実行されるわけではない。
【0048】
次に、動き検出モードについて説明する。
【0049】
図4は同実施形態におけるROIの設定シーケンスのフローチャートである。
【0050】
図4に示すように、動き検出モードの作動中にスタートボタン132bがONにされると(ステップS1)、ROIの設定シーケンスが開始され(ステップS2)、その直後の画像データが基準画像データに指定される。
【0051】
そして、基準画像データが指定されたら、当該基準画像データに種々の画像処理が施され、ROIの検索対象として実際に使用される参照画像データが生成される(ステップS3)。基準画像データに施される画像処理としては、平均処理や閾値処理などがある。
【0052】
平均処理が採用される場合、基準画像データの直前に生成された数フレーム分の画像データが使用され、これら画像データにおいて空間的に対応する複数のピクセルの平均輝度に基づいて参照画像データが生成される。
【0053】
閾値処理が採用される場合、基準画像データのフレーム全体の平均輝度、もしくはそれよりも高い輝度が閾値に設定され、この閾値によって2値化された基準画像データのピクセルの輝度に基づいて参照画像データが生成される。
【0054】
したがって、平均処理もしくは閾値処理によって生成される参照画像データには、ノイズ成分がほとんど無く、造影剤バブルの染影もしくは生体組織だけが反映されていることになる。
【0055】
参照画像データが生成されたら、ROIと同じサイズ及び形状の検索領域が参照画像データ上に作成される。この検索領域は、参照画像データ全体にわたって移動する。そして、検索画像領域が1ピクセル分だけ移動するたびに、その内側に含まれるピクセルの輝度が検出される(ステップS4)。
【0056】
そして、検索領域に含まれる全ピクセルに占める、輝度が閾値K以上のピクセルが閾値M個以上となる画像領域(以下、「ROIの条件を満たす画像領域」とする。)が発見されたら、その中から、輝度がK以上のピクセルが最も多かった画像領域が検索され(ステップS5のYes)、その画像領域にROIが設定される(ステップS6)。以上で、ROIの設定シーケンスが終了となる(ステップS7)。
【0057】
なお、設定されたROIは、図5に示すように、矩形枠状のROIマークとして、モニタ12に表示される診断画像に重畳される。また、ROIを複数利用する場合には、利用する数だけのROIが設定されるまで、ROIの設定シーケンスが実行される。被検体への造影剤投与直後やフラッシュ送信直後においては、画面上に高輝度領域(すなわち造影剤流入領域)は存在せず、画像上には高輝度領域が徐々に出現するのが一般的である。従って、本ROIの設定シーケンスに従えば、例えば画像上に高輝度領域が1つ出現した場合にはROIが一つ設定され、その後高輝度領域が二箇所になった場合には2つのROIが設定されるといった具合に、画像上の高輝度領域の増加に伴って設定されるROIの数が増えることになる。従って、例えば3つのROIを利用する場合であれば、画像上にROIの条件を満たす高輝度領域が3つ出現し、これらに対応した3つのROIが設定されるまで、本実施形態に係るROIの設定シーケンスが実行されることになる。
【0058】
一方、検索領域が参照画像データ上を全体にわたって移動しても、ROIの条件を満たす画像領域が発見されなかった場合(ステップ5のNo)、ROIの設定シーケンスが終了となる(ステップS7)。
【0059】
このように、ROIの条件を満たす画像領域が発見されずにROIの設定シーケンスが終了した場合、続いて生成される画像データが基準画像データに指定され、再度ROIの検索シーケンスが実行される。こうして、ROIが設定されるまで、ROIの設定シーケンスは繰り返される。
【0060】
続いて、基準画像データ(参照画像データ)上のROIに基づいて、基準画像データに後行する各画像データ上において当該ROIと対応する領域(対応領域)を設定する。この設定は、例えば後行する各画像データ上においてROIと同形状、同サイズの領域をスイープさせ、輝度分布パターン等が最も近いものを対応領域とすることができる。
【0061】
以上の手続を経て、各画像データにROIが設定されたら、基準画像データのROIに含まれるピクセルの輝度と、基準画像データに後行する各画像データの対応領域内に含まれるピクセルの輝度との相関から、基準画像データとこれに後行する画像データとの動きを表現した動きベクトルが生成される。なお、動きベクトルを生成する手法については、特に限定はない。具体例としては、動き認識で一般的なブロックマッチングの手法であるSAD(Sum of Absolute Difference)を利用することができる。
【0062】
そして、動きベクトルが生成されたら、当該動きベクトルに基づき、基準画像データに後行する画像データの表示位置が補正される。これにより、基準画像データに対して殆んどぶれが存在しない補正画像データが生成される。
【0063】
補正画像データは、生成されるたびに、最大輝度値保持演算によって基準画像データに重畳される。したがって、補正画像データの重畳が実行されている期間は、スキャン面に流入する造影剤バブルの染影が連結されてゆき、モニタ12に表示される診断画像には、被検体Pの血管構造が描出される。しかも、基準画像データに重畳される補正画像データは、事前の処理によって、ぶれ補正されているから、多数フレーム分の補正画像データが重畳されても、モニタ12に表示される診断画像は非常に鮮明なものとなる。したがって、被検体Pの動きの影響や超音波プローブ11を把持する手ぶれの影響が無い、非常に鮮明な診断画像が取得される。
【0064】
なお、例えば(1)フレーム目〜(2)フレーム目までの画像データに、ROIの条件を満たす領域が無かった場合、(3)フレーム目の画像データが基準画像データに指定される。そして、(1)フレーム目〜(2)フレーム目の画像データは、(4)フレーム目以降の画像データに基づいて生成される補正画像データと同様に、基準画像データである(3)フレーム目の画像データに重畳される。
【0065】
なお、(1)フレーム目〜(2)フレーム目までの画像データは、ぶれ補正されていないが、ROIの条件を満たす領域が発見されないほどの暗さであることから、これらの画像データが基準画像データに重畳されても、診断画像の品質に全く悪い影響が及ぼされない。
【0066】
次に、フラッシュ直後におけるぶれ補正について説明する。
【0067】
フラッシュ直後にスタートボタン132bがONにされると、ほとんど真っ暗な画像データが基準画像データに指定される。しかしながら、本実施形態では、参照画像データに含まれるピクセルの輝度に基づき、フラッシュ直後の真っ暗な画像データの中でも比較的輝度が高い領域にROIが設定されるから、参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する画像データのROIにおけるピクセルの輝度との相関が得られ易く、基準画像データに後行する画像データのぶれ補正が正確に実行される。したがって、モニタ12に表示される診断画像は、非常に鮮明なものとなる。
【0068】
次に、フラッシュ後における診断画像とROIについて説明する。
【0069】
図6は同実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。図6において、白い部分は明るい領域を示し、斜線部分は暗い領域を示している。
【0070】
図6Aはフラッシュの瞬間の診断画像、図6Bはフラッシュ後における1フレーム目の診断画像、図6Cはフラッシュ後における2フレーム目の診断画像、図6Dはフラッシュ後における3フレーム目の診断画像、図6Eはフラッシュ後における4フレーム目の診断画像である。
【0071】
即ち、1フレーム目の診断画像はフラッシュ後に最初に生成された1フレーム目の画像データそのもの、2枚目の診断画像は画像データの1フレーム目と2フレーム目が重畳されたもの、3フレーム目の診断画像は画像データの1フレーム目〜3フレーム目が重畳されたもの、4枚目の診断画像は画像データの1フレーム目〜4フレーム目が重畳されたもの、5フレーム目の診断画像は画像データの1フレーム目〜5フレーム目が重畳されたものである。
【0072】
図6Aに示すように、フラッシュが実行されると、モニタ12に表示されている診断画像は、いったん真っ暗な状態になる。そして、フラッシュが実行されてから時間が経過すると、スキャン面内に存在する太い血管から造影剤バブルが流入してゆき、徐々に診断画像に被検体Pの血管構造が描出されてくる。このときROIの設定シーケンスが作動していれば、図6Bに示すように、条件を満たす領域にROIが設定される。そして、ROIが設定されてからさらに時間が経過すると、図6C〜図6Eに示すように、血管構造がより明瞭化される。このとき、最初に設定されたROIの位置は、固定されたままである。
【0073】
なお、本実施形態では、ROIの検索にあたり、検索領域に含まれるピクセルの輝度が閾値Kによって二値化されている。しかしながら、本発明は、これに限定されるものではない。例えば、検索領域に含まれるピクセルの輝度に関してヒストグラムを作成し、輝度が高い方から数えて所定パーセント(例えば20%)に含まれるピクセルの輝度に基づき、ROIの検索をしても良い。こうすれば、ノイズ成分がROIの検索に影響し難くなるから、前述の平均処理や閾値処理などの画像処理が不要となる。
【0074】
この他にも、閾値を二つ設け、その二つの値の間にある輝度値をもつピクセルに基づいてROIの検索をしてもよい。一般的に太い血管などは、造影剤バブルの流入により非常に高輝度となる。しかしながら、このような太い血管を含む領域にROIが設定されても、その太さのために、ぶれ補正のための特徴領域としての機能を充分に果たさない場合が多い。したがって、このような非常に高輝度なピクセルをROI検索の対象外とすることで、ぶれ補正に適した特徴領域をROIとして抽出することができる。
【0075】
(本実施形態による作用)
本実施形態では、スタートボタン132bがONにされた直後の画像データが基準画像データに指定される。そして、当該基準データから生成された参照画像データの輝度に基づき、造影剤バブルの染影が密集する太い血管を含む領域にROIが設定される。
【0076】
そのため、参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する各画像データの対応領域におけるピクセルの輝度の相関が得られ易く、基準画像データに後行する画像データのぶれ補正が正確に実行されるから、重畳によって生成される診断画像は、非常に鮮明なものとなる。
【0077】
本実施形態において、フラッシュボタン132cが押された直後の画像データが基準画像データに指定される。そして、当該基準画像データから生成された参照画像データの輝度に基づき、造影剤バブルの染影が速く回復する太い血管を含む領域にROIが設定される。
【0078】
これにより、フラッシュ直後のように、参照画像データにぶれ補正の目印となる領域があまり存在しない場合であっても、比較的速く造影剤バブルが染影しはじめる太い血管を含む領域にROIが自動的に設定される。
【0079】
そのため、参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する各画像データの対応領域におけるピクセルの輝度の相関が得られ易く、基準画像データに後行する画像データのぶれ補正が正確に実行されるから、重畳によって生成される診断画像は、非常に鮮明なものとなる。
【0080】
本実施形態において、参照画像データは、事前の画像処理によって、ノイズ成分が除去されている。そのため、ROIの設定にノイズの影響が作用しないから、太い血管を含む領域に正確にROIが設定される。
【0081】
本実施形態において、ROIに含まれるピクセル数は、画像データ全体のピクセル数よりも少ない。そのため、基準画像データから生成された参照画像データのROIにおけるピクセルの輝度と、基準画像データに後行する各画像データの対応領域におけるピクセルの輝度との相関を求めるのに必要な計算量が非常に少なくなる。
【0082】
本実施形態において、フラッシュボタン132cがONにされると同時に、ぶれ補正が開始される。したがって、フラッシュ直後からスキャン面に流入してくる造影剤バブルの染影が漏れなく重畳される。その結果、被検体Pの血管構造が診断画像上にほとんど完全な姿で描出される。
【0083】
本実施形態において、モニタ12は、診断画像上にROIマークを重畳表示する。そのため、操作者は、モニタ12に表示された診断画像を見ることによって、ROIの設定が適正であるか確認することができる。
【0084】
本実施形態において、入力装置13は、ROIマークの表示と非表示とを切り替えるボタンもしくはスイッチを備えている。そのため、診断においてROIマークが邪魔なときに、操作者は簡単にROIマークを消去することができる。
【0085】
本実施形態において、入力装置13は、ぶれ補正の開始のタイミングを指定するボタン、即ちスタートボタン132bとフラッシュボタン132cを備えている。そのため、操作者は、所望のタイミングでぶれ補正を開始することができるから、被検体Pの症状や条件に最適な診断画像が得られる。
【0086】
さらに、本実施形態において、入力装置13は、ぶれ補正の実行期間を指定するトラックボールを備えている。そのため、操作者は、ぶれ補正が開始されてから所定時間が経過するまでの血流の環流の変化を繰り返し見ることができる。
【0087】
なお、本実施形態では、MFIについて述べているが、本発明は、これに限定されるものではない。即ち、本発明は、複数の画像データを重畳する技術であれば、例えば[背景技術]の欄で述べた「Panoramic imaging」にも適用可能である。
【0088】
また、本実施形態において、ROIの数とサイズは、入力装置13によって入力されているが、例えば、参照画像データに含まれるピクセルの輝度に基づいて自動設定されることもある。
【0089】
(同実施形態の変形例)
低音圧スキャンによって取得されて、既に画像メモリ30aに保存された複数の画像データに基づいてMFIが実行されることがある。この場合、基準画像データに先行する画像データもぶれ補正され、それによって取得された補正画像データも基準画像データに重畳される。即ち、基準画像データに先行する画像データに基づいて生成された補正画像データが基準画像データに重畳されることもある。このように、基準画像データに先行する画像データがぶれ補正されていれば、フレーム間のぶれによる影響が更に低減するから、診断画像の品質がさらに向上する。
【0090】
(同実施形態に変形例)
低音圧スキャンによって取得された複数の画像データの輝度に基づき、これら複数の画像データのぶれ補正に共通して使用可能なROIが設定されることがある。これは、低音圧スキャンによって取得されて、既に画像メモリ30aに保存された複数の画像データに基づいてMFIが実行される場合などに有効である。
【0091】
(同実施形態の変形例)
次に、図7を参照して、本実施形態の変形例について簡単に説明する。
【0092】
図7は同実施形態の変形例における3つのROIマークが重畳表示された診断画像の概略図である。
【0093】
図7に示すように、ROIが3つであれば、画像データのフレーム間における回転ぶれなどの補正も可能となる。しかも、これら3つのROIを合わせても、ROIの含まれるピクセル数は、画像データ全体のピクセル数に比べて非常に少ないから、従来のような画像データ全体のピクセルを使用して動きベクトルを生成する手法に比べて、計算量がかなり削減される。
【0094】
(同実施形態の変形例)
本実施形態の手法は、三次元画像データを用いた最大輝度保持演算を行う場合(すなわち、時系列なボリュームデータ間において、空間的位置が対応するボクセル同士の値を経時的に追跡し、最も大きな値を有するボクセルを採用して画像化する場合)にも有効である。係る場合には、検索領域、ROI条件を満たす画像領域、設定されるROIは全て三次元領域となり、各領域に含まれるボクセルの値を用いて既述のアルゴリズムを実行することで、ボリュームデータ間のぶれ補正を実現することができる。
【0095】
(同実施形態の変形例)
本実施形態に係るぶれ補正を利用したMFIにより生成された診断画像と、本実施形態に係るぶれ補正を利用しないMFIにより生成された診断画像とを、同時に(例えば並列的に、又は異なる色を割り当てて重畳的に)表示するようにしてもよい。また、ぶれ補正を利用した診断画像と利用しない診断画像とを選択的に表示可能としてもよい。この様な構成とすることで、より幅広い診断情報を提供することができ、また、従来より自由度の高い画像診断を実現することができる。
【0096】
(同実施形態の変形例)
本実施形態に係るぶれ補正において、太い血管の血流領域内にROIが設定されてしまうと、設定されたROI内がすべて高輝度領域となってしまうことがある。係る場合には、基準画像データに後行する各画像データ上で対応領域を特定することができず、移動ベクトルの計算を行うことができないことがある。
【0097】
係る不具合を解消するため、ぶれ補正において、造影剤バブルが染影された高輝度領域(例えば第1の閾値以上の輝度を有する領域)と造影剤バブルとは関係しない低輝度領域(例えば第2の閾値以下の輝度を有する領域)とを含むROIを基準画像データ(参照画像データ)上に設定するようにしてもよい。この様な構成によれば、ROI内の輝度分布パターンが高輝度によって一様になることはない。従って、基準画像データに後行するフレーム上においても適切にROIに対応する領域を特定することができ、好適なぶれ補正を実現することができる。
【0098】
(第2の実施形態)
次に、図面を参照することなく、第2の実施形態について説明する。
【0099】
本実施形態では、いったんROIが設定されても、それ以降に画像データが生成されるたびに、ROIの設定がなされる。即ち、ROIが設定されたあとで新たに画像データが生成されると、その直前の画像データが基準画像データに指定される。そして、新たに指定された基準画像データから参照画像データが生成され、当該参照データに基づいて、ROIの設定がなされる。
【0100】
ただし、ROIの設定シーケンスが作動するのは、最初にROIが設定されるときだけである。2回目以降にROIが設定される場合、その直前の画像データのぶれ補正に使用されたROIと、既に生成されている全ての動きベクトルの合成ベクトルとに基づき、ROIの再設定がなされる。なお、ここで述べる動きベクトルとは、画像データの連続する画像データ間の動きを表現するベクトルである。
【0101】
即ち、(n)フレーム目の画像データのぶれ補正に使用されるROIは、(n−1)フレーム目の画像データのぶれ補正で使用されたROIと、(n−1)フレームの画像データのぶれ補正までに生成された全ての動きベクトルの合成ベクトルとに基づいて設定される。
【0102】
(第3の実施形態)
次に、図8を参照して、第3の実施形態について説明する。
【0103】
本実施形態では、画像データが生成されるたびに、ROIの設定シーケンスが作動して、それぞれの画像データの輝度に基づいてROIの設定がなされる。なお、第2の実施形態において、ROIの設定シーケンスが作動するのは、最初にROIが設定されるときだけであった。したがって、いったんROIが設定されたら、それ以降のROIは、既存のROIと移動ベクトルに基づいて設定されていた。この点で、本実施形態は、第2の実施形態と大きく異なっている。
【0104】
図8は本発明の第3の実施形態におけるフラッシュ後に生成される5フレーム分の診断画像の概略図である。なお、図8において、白い部分は明るい領域を示し、斜線部分は暗い領域を示している。
【0105】
図8Aはフラッシュの瞬間の診断画像、図8Bはフラッシュ後における1フレーム目の診断画像、図8Cはフラッシュ後における2フレーム目の診断画像、図8Dはフラッシュ後における3フレーム目の診断画像、図8Eはフラッシュ後における4フレーム目の診断画像である。
【0106】
即ち、1枚目の診断画像はフラッシュ後に最初に生成された1フレーム目の画像データそのもの、2フレーム目の診断画像は画像データの1フレーム目と2フレーム目が重畳されたもの、3フレーム目の診断画像は画像データの1フレーム目〜3フレーム目が重畳されたもの、4フレーム目の診断画像は画像データの1フレーム目〜4フレーム目が重畳されたもの、5フレーム目の診断画像は画像データの1フレーム目〜5フレーム目が重畳されたものである。
【0107】
図8B〜図8Dに示すように、2フレーム目の診断画像〜4フレーム目の診断画像では、ROIが同じ位置に設定されている。これは、画像データの3フレーム目〜4フレーム目に基づいてROIの設定シーケンスが作動したものの、既存のROIより優良なROIが検出されなかったからである。しかしながら、図8Eに示すように、5フレーム目の診断画像では、新しくROIが設定されている。なお、実線で示されているのが新しいROIマークであって、点線で示されているのが消失したROIマークである。このように、ROIの位置が移動したのは、5フレーム目の画像データに基づいてROIの検索がなされた結果、既存のROIより優良なROIが検出されたからである。
【0108】
このように、画像データが生成されるたびに、ROIの設定シーケンスが作動すれば、常に動き補正が正確に実施されるから、高い画像品質の診断画像が安定して得られることになる。
【0109】
さらに、超音波プローブ11がレンズ方向に移動して、それまでぶれ補正の目印としていた血管(実際には造影剤バブルの染影部分)がスキャン面から消失しても、移動先で新たに最適なROIが設定されるから、超音波プローブ11のレンズ方向へ移動しても正確な動き補正が実行される。
【0110】
(第4の実施形態)
次に、図9、図10を参照して、第4の実施形態について説明する。
【0111】
超音波プローブが超音波走査面(又は超音波断層面、超音波画像面)に沿ってずれた場合には、第1乃至第3の実施形態で述べた手法により、当該ずれに起因する画像のぶれを好適に補正することができる。また、最大輝度値保持演算では複数の画像間で最も高い輝度値が選択され、一枚の画像に投影される。このため、超音波プローブが超音波走査面に垂直な方向(煽り方向)にずれた場合であっても、最大輝度値が投影された画像には、所望する断層位置に関する情報が含まれるため、臨床上問題はないと言える。
【0112】
その一方で、煽り方向に関するぶれを補正して、同一断面関する時系列な画像データを用いた最大輝度値保持演算を実現することも、臨床的価値は高いと考えれられる。そこで、本実施形態では、煽り方向に関するぶれを補正して、さらに好適なIMFを実現することができる超音波診断装置について説明する。
【0113】
図9は、本実施形態に係るぶれ補正を含むMFIにおける処理の流れを示したフローチャートである。図9に示すように、まず被検体に対し造影剤が投与されると(ステップS40)、診断対象部位について、図10に示すような時系列な二次元画像データ群(ボリュームデータを構成してもしなくてもよい。)が取得される(ステップS41)。その後、例えば時刻t1の二次元画像データ群を用いて、基準画像データが指定されると共に既述のアルゴリズムに従ってぶれ補正のためのROIが設定される(ステップS42;図4参照)。
【0114】
次に、収集時刻の異なる二次元画像データ群の中から、基準画像データに対応する対応画像データを選択する(ステップS43)。すなわち、例えば、ステップS41において7フレーム分の二次元画像データ群が時系列で収集され、時刻t1に収集された二次元画像データ群の第4フレームの画像データを基準画像データとした場合を想定する。係る場合において、時刻t2において収集された二次元画像データ群2の第4フレームの画像データ、及びその前後数フレームのデータ(例えば、第3フレーム及び第5フレーム。)のうち、当該基準画像データと最も相関の高い画像データを判定し、対応画像データとして選択する。
【0115】
続いて、時刻t3において収集された二次元画像データ群3を用いて、同様の処理を行う。例えば、時刻t3において第3フレームの画像データが対応画像データとして選択されたとする。係る場合には、時刻t3において収集された二次元画像データ群2の第3フレームの画像データ、及びその前後数フレームのデータ(例えば、第2フレーム及び第4フレーム。)のうち、当該基準画像データと最も相関の高い画像データを判定し、対応画像データとして選択する。同様にして、他の時刻t4,・・・,tnで収集された各二次元画像データ群からも、対応画像データが選択される。
【0116】
なお、相関の判定手法には拘泥されない。例えば、パターンマッチング等の手法により、基準画像データと各画像との相関値を計算しその相関を判定することができる。また、各時刻における対応画像データの選択をリアルタイムで行う場合には、最新の対応画像データの空間的位置を中心として前後数フレーム分が収集されるように超音波走査領域を自動的に制御し、得られた二次元画像データ群を用いて同様の選択処理を行えばよい。
【0117】
次に、基準画像データ、及び各時刻における対応画像データを用いて、既述のぶれ補正が実行され(ステップS44)、最大輝度値保持演算により診断画像が生成される(ステップS45)。生成された診断画像は、所定の形態にてモニタ12に逐次動的又は静的に表示される(ステップS46)。
【0118】
以上述べた構成では、各時刻において収集された画像データ群の中から、基準画像データと最も相関の高いものを対応画像データとして選択し、これを用いてぶれ補正を行っている。そのため、例えば超音波プローブの煽り方向に関する位置ずれに起因して、基準画像データの位置が煽り方向に移動した場合であっても、移動前の基準画像データの位置に最も近い画像を対応画像として選択することができる。従って、対応画像を用いて第1乃至第3の実施形態のいずれかにおいて説明したぶれ補正を実行することで、同一断面関する時系列な画像データを用いた最大輝度値保持演算を実現することができる。
【0119】
(第5の実施形態)
次に、本発明の第5の実施形態について説明する。本実施形態は、動きベクトルを生成するときに指標となる相関量Sを計算し、これに基づいてぶれ補正(動き補正)を行うものである。なお、本実施形態に係る超音波診断装置は、図1に示した構成と実質的に同一である。従って、機能の異なる構成要素のみ以下説明する。
【0120】
制御プロセッサ25は、画像データ上に検索領域を作成して、これを画像データ全体にわたり移動させつつ、その内側に含まれるピクセルの輝度を検出する。そして、制御プロセッサ25は、検索領域の内側に含まれるピクセルの輝度に基づき、画像データ上にROIを設定する。さらに、制御プロセッサ25は、複数の画像データのROIに含まれる複数のピクセルの輝度に基づき、相関量Sを算出するとともに、得られた複数の相関量Sに基づき、画像データ間の動きを表現する動きベクトルを生成する。そして、制御プロセッサ25は、得られた動きベクトルに基づき、画像データを動き補正する。
【0121】
次に、本実施形態に係る動き検出モードについて説明する。
【0122】
まず、図4に示したステップS1乃至S4までの各処理が順次実行され、ROIの条件を満たす画像領域が検索される。ROIの条件を満たす画像領域が発見されると、その中から、輝度がK以上のピクセルが最も多かった画像領域が特定され、その画像領域にROIが設定される。以上で、ROIの設定シーケンスが終了となる。なお、設定されたROIは、図11に示すように、矩形枠状のROIマークとして、モニタ12に表示される診断画像に重畳される。
【0123】
一方、検索領域が参照画像データ上を全体にわたって移動しても、ROIの条件を満たす画像領域が発見されなかった場合、ROIの設定シーケンスが終了となる。このように、ROIの条件を満たす画像領域が発見されずにROIの設定シーケンスが終了した場合、続いて生成される画像データが基準画像データに指定され、再度ROIの検索シーケンスが実行される。こうして、ROIが設定されるまで、ROIの設定シーケンスは繰り返される。
【0124】
なお、本実施形態において、ROIは、自動的に設定されているが、本発明は、これに限定されるものではなく、トラックボール入力部131などのマニュアル操作によって設定されることもある。
【0125】
以上の手続を経て、ROIが設定されたら、その直後の画像データが対象画像データに指定される。対象画像データは、生成された時点での位置を基準として、X軸方向とY軸方向にピクセル単位で動かされる。そして、対象画像データが1ピクセル分だけ動くたびに、基準画像データのROIに含まれるピクセルの輝度I(X、Y)と、対象画像データのROIに含まれるピクセルの輝度I´(X、Y)とが抽出され、以下の[数1]に代入される。こうして、対象画像データの移動回数と同じだけの相関数Sが算出される。
【0126】
そして、事前に決められた移動回数分の相関量Sが得られたら、その中から最も小さな相関量Sが検索され、これに対応する対象画像データの移動量および移動方向が特定される。そして、特定された移動量および移動方向に基づき、対象画像データの動きベクトルが求められる。なお、求められた動きベクトルは、対応する対象画像データと対応づけられて、画像メモリ30aに保存される。
【0127】
こうして、対象画像データの動きベクトルが求められたら、当該動きベクトルに基づき、対象画像データの表示位置が補正される。これにより、基準画像データに対して殆んどぶれが存在しない補正画像データが生成される。補正画像データは、最大輝度値保持演算によって基準画像データに重畳され、重畳画像データが生成される。
【0128】
一方、既に重畳画像データが生成されている場合、新たに生成される画像データが対象画像データに指定される。対象画像データは、生成された時点での位置を基準として、X軸方向とY軸方向にピクセル単位で動かされる。そして、対象画像データが1ピクセル分だけ動くたびに、既に生成されている重畳画像データのROIに含まれるピクセルの輝度I(X、Y)と、対象画像データのROIに含まれるピクセルの輝度I´(X、Y)とが抽出され、以下の[数1]に代入される。こうして、対象画像データの移動回数と同じだけの相関数Sが求められる。
【0129】
そして、事前に決められた移動回数分の相関量Sが得られたら、その中から最も小さなものが検索され、これに対応する対象画像データの移動量および移動方向が特定される。そして、特定された移動量および移動方向に基づき、対象画像データの動きベクトルが求められる。なお、求められた動きベクトルは、対応する対象画像データと対応づけられて、画像メモリ30aに保存される。
【0130】
こうして、対象画像データの動きベクトルが求められたら、当該動きベクトルに基づき、対象画像データの表示位置が補正される。これにより、既に生成されている重畳画像データに対して殆んどぶれが存在しない補正画像データが生成される。補正画像データは、最大輝度値保持演算によって重畳画像データに重畳される。以上のような手続によって、重畳画像データが逐次更新される。
【0131】
相関量Sは、以下の[数1]によって算出される。
【数1】
【0132】
[数1]において、符号Nは、画像データのフレーム番号である。なお、図12に示すように、画像データの1フレーム目が重畳画像データの1フレーム目として扱われている。従って、重畳画像データのN−1フレーム目は、画像データの1フレーム目(基準画像データ)に、2フレーム目からN−1フレーム目までが重畳されたものである。
【0133】
[数1]を見ると、本実施形態で使用される相関量Sは、重畳画像データに、新たに生成される画像データ、即ち対象画像データが重畳されるときの輝度増加量の総和であることがわかる。
【0134】
以上のように、動き検出モードの作動中にスタートボタン132bがONにされると、それ以降に生成される画像データは、次々と補正され、補正画像データが生成される。これらの補正画像データは、生成されるたびに、最大輝度値保持演算によって、重畳画像データに重畳される。
【0135】
したがって、補正画像データの重畳が実行されている期間は、スキャン面に被検体Pの血管構造が描出される。しかも、重畳される補正画像データは、事前の処理によって、動き補正されているから、モニタ12に表示される診断画像は非常に鮮明なものとなる。したがって、被検体Pの動きの影響や超音波プローブ11を把持する手ぶれの影響が無い、非常に鮮明な診断画像が取得される。
【0136】
なお、本実施形態では、低音圧スキャンの実行中にスタートボタン132bが押されたケースだけが説明されているが、フラッシュ直後における動き補正もこれと同等である。したがって、ここでは説明を省略することとする。
【0137】
(本実施形態による作用)
本実施形態では、動きベクトルを生成するときに指標となる相関量Sとして、重畳画像データに、新たに生成された画像データが重畳されたときの輝度増加量の総和が採用されている。そのため、造影剤バブルの染影が非定常的に点滅していても、これらの染影が持続されるものとして、動きベクトルが生成される。その結果、MFIが実施されるときも、対象画像データの動きベクトルの精度が向上するから、非常に鮮明な診断画像が得られる。
【0138】
本実施形態において、ROIは、造影剤バブルの染影が密集する太い血管を含む領域に設定される。そのため、例えばフラッシュ直後のように、動き補正の目印となる領域があまり存在しない場合であっても、重畳画像データのROIと、新たに生成される画像データとの相関が得られやすい。
【0139】
本実施形態において、ROIに含まれるピクセル数は、画像データの全ピクセル数よりも少ない。そのため、重畳画像データのROIと、対象画像データのROIとの相関量Sを求めるのに必要な計算量が非常に少なくなる。
【0140】
本実施形態において、モニタ12は、診断画像にROIマークを重畳表示する。そのため、操作者は、モニタ12に表示された診断画像から、ROIの設定が適正であるか確認することができる。
【0141】
本実施形態において、ROIが設定された場合にだけ、動き補正のシーケンスが始動する。そのため、動き補正の目印となる領域が存在しなときには、対象画像データが補正されることがない。
【0142】
本実施形態において、動きベクトルは、対象画像データと対応づけられて、画像メモリ30aに保存される。そのため、既に画像メモリ30aに記憶された画像データに基づき、重畳画像データを再構築する場合に、動きベクトルを生成する必要が無いから、少ない計算量で鮮明な診断画像が生成される。
【0143】
なお、本実施形態では、MFIについて述べているが、本発明は、これに限定されるものではない。即ち、本発明は、複数の画像データを重畳する技術であれば、例えば[背景技術]の欄で述べた「Panoramic imaging」にも適用可能である。
【0144】
また、本実施形態において、ROIの数とサイズは、入力装置13によって入力されているが、例えば、参照画像データに含まれるピクセルの輝度に基づいて自動設定されることもある。
【0145】
さらに、本実施形態において、ROIは、参照画像データの輝度に基づき、自動的に設定されているが、例えば、送受信ユニット21によって送信される超音波のフォーカス点に連動して設定されても良いし、操作者からの指示に従って設定されても良い。
【0146】
また、本実施形態において、動きベクトルは、対象画像データと対応づけられて、画像メモリ30aに保存されているが、例えば、補正画像データそのものが画像メモリ30aに保存されることもある。こうすれば、対象画像データを補正する必要が無いから、非常に少ない計算量で鮮明な診断画像が生成される。
【0147】
(第6の実施形態)
次に、図13を参照して、本発明の第6の実施形態について説明する。図13は本発明の第6の実施形態におけるROIマークが重畳表示された診断画像の概略図である。
【0148】
本実施形態において、制御プロセッサ25は、図13に示すように、参照画像データ上に第1〜第4のROIを設定する。なお、第4のROIは、第5の実施形態におけるROIに相当するものである。従って、本実施形態において、制御プロセッサ25は、第5の実施形態におけるROIのほかに、第1〜第3のROIを設定することになる。なお、第1〜第3のROIは、第4のROIよりもサイズが小さい。
【0149】
第1〜第4のROIが設定されたら、重畳画像データの第1〜第3のROIと、対象画像データの第1〜第3のROIとの相関量S´に基づき、それぞれ対象画像データの動きを表現する第1〜第3の動きベクトルが求められる。なお、本実施形態では、相関量S´として、SADが使用されている。
【0150】
こうして、第1〜第3のベクトルが求められたら、これら第1〜第3のベクトルに従い、対象画像データが動かされる。そして、対象画像データが動くたびに、重畳画像データの第4のROIと、対象画像データの第4のROIとに基づき、第5の実施形態と同じ要領で、即ち前述の[数1]に従って、それぞれ第1〜第3の相関量Sが算出される。
【0151】
そして、第1〜第3の相関量Sが算出されたら、その中から最も小さな相関量Sが検出され、これに対応する対象画像データのベクトルが動きベクトルとして採用される。そして、採用された動きベクトルに従い、対象画像データの表示位置が補正される。
【0152】
以上のように、本実施形態では、事前に取得された第1〜第3のベクトルから、動きベクトルが選択される。即ち、動きベクトルの生成に必要な計算([数1]を使用して実行される計算)が3通りで済む。従って、第5の実施形態に比べて、動きベクトルを求めるために必要な計算量が飛躍的に減ることになる。さらに、被検体の部位によって動きベクトルにばらつきがあるような場合でも、動きベクトルの精度が極端に低下することがない。
【0153】
なお、本実施形態における相関量S´は、いわゆるSADであるが、本発明は、これに限定されるものではない。即ち、相関量S´は、[数1]によって算出されても構わない。たとえ[数1]が使用されたとしても、第1〜第3のROIは、第4のROIに比べて小さいので、計算量が低減することになる。
【0154】
さらに、本実施形態において、動きベクトルは、事前に取得された第1〜第3のベクトルに基づき、[数1]に従って求められているが、本発明は、これに限定されるものではなく、例えば、第1〜第3の動きベクトルの平均値や最頻値であっても良い。平均値や最頻値が採用されたら、必要な計算量は、さらに低減することになる。
【0155】
(第7の実施形態)
本実施形態では、第6の実施形態において使用された第1〜第3のベクトルのほかに、さらに零ベクトルが追加されている。即ち、本実施形態では、対象画像データが動かない場合についても、基準画像データの第4のROIもしくは既に生成されている重畳画像データの第4のROIと、対象画像データの第4のROIとに基づき、第5の実施形態と同じ要領で、即ち[数1]に従って、第4の相関量Sが算出される。
【0156】
そして、第1〜第4の相関量Sが算出されたら、その中から最も小さな相関量Sが検出され、これに対応する対象画像データのベクトルが動きベクトルとして採用される。そして、採用された動きベクトルに従い、対象画像データの表示位置が補正される。
【0157】
以上のように、本実施形態では、対象画像データが動かない場合についても、[数1]に従って、第4の相関量Sが算出されている。そのため、超音波プローブ11がレンズ方向に傾き、第1〜第3のベクトルが異常な値となっても、実際の補正に使用される動きベクトルの精度が極端に低下することがない。
【0158】
(第8の実施形態)
本実施形態では、3次元の画像データを生成することが想定されている。そのため、参照画像データ上には、3次元のROIが設定される。しかしながら、ROIが3次元となると、相関量Sを求めるための計算量は猛烈に増加する。
【0159】
そこで、本実施形態では、3次元のROIの代わりに、2次元の第1〜第3のROIが使用される。第1〜第3のROIは、3次元のROIに含まれ且つ互いに直交していて、前述した3次元のROIのMPRとして生成される。なお、本実施形態における第1〜第3のROIは、第6、第7の実施形態における第1〜第3のROIとは異なるものである。
【0160】
第1〜第3のROIが生成されたら、第5の実施形態と同じ要領で、これら第1〜第3のROIに対応する第1〜第3のベクトルが生成される。なお、本実施形態における第1〜第3のベクトルは、第6、第7の実施形態における第1〜第3のベクトルとは異なるものである。
【0161】
そして、第1〜第3のベクトルが生成されたら、これら第1〜第3のベクトルに基づき、対象画像データの動き補正をするときに実際に使用される3次元の動きベクトルが生成される。
【0162】
以上のように、本実施形態では、3次元のROIの代わりに、2次元の第1〜第3のROIが使用される。そのため、3次元の画像データを生成する場合であっても、相関量Sを求めるのに必要な計算量が飛躍的に低減する。
【0163】
なお、本実施形態では、第1〜第3のベクトルに基づき、3次元の動きベクトルが生成された上で、対象画像データが補正されている。しかしながら、本発明は、これに限定されるものではい。例えば、第1〜第3のベクトルごとに、対象画像データが補正されても良い。こうすれば、補正回数は3回となるものの、動きベクトルを生成する必要がなくなる。
【0164】
(第9の実施形態)
本実施形態において、制御プロセッサ25は、重畳画像データのROIに含まれるピクセルの輝度の総和を検出していて、当該輝度の総和が規定値を超えた場合に、対象画像データの動き補正を中止する。従って、多数の画像データが重畳されて、重畳画像データのROIが明るくなり過ぎても、動きベクトルの精度が極端に低下することがない。
【0165】
(第10の実施形態)
本実施形態では、血流画像データと組織画像データが並べて表示されることが想定されている。なお、血流画像データは、前述の各実施形態における画像データに相当する。組織画像データは、血流画像データのように経時的に変化しない。そのため、動きベクトルの計算が容易である。そこで、本実施形態では、組織画像データにROIが設定され、第1の実施形態と同じ要領で、即ち[数1]に従い、動きベクトルが生成される。そして、生成された動きベクトルに基づき、血流画像データだけが動き補正される。
【0166】
本実施形態のように、組織画像データに設定されたROIに基づき、血流画像データが動き補正されると、さらに鮮明な診断画像を得られる。また、本実施形態では、組織画像データは、補正されずに、そのままモニタ12に表示される。そのため、操作者は、モニタ12に表示される組織画像データによって、動き量を確認しやすく、しかも、被検体Pの様子を視認できることによって、安心して診断を実施することができる。
【0167】
(第11の実施形態)
図14、図15、図16、図17は本発明の第11の実施形態における診断画像の重畳される補正結果の概略図である。本実施形態において、対象画像データの補正結果は、診断画像上に重畳される。補正結果の表示形態としては、図14、図15、図16、図17に示すように、幾つかのタイプがある。
【0168】
図14に示すタイプでは、対象画像データの補正結果として、対象画像データの動きベクトルVだけが表示される。そのため、ある瞬間の対象画像データの補正結果が非常にわかり易い。図15に示すタイプでは、対象画像データの補正結果として、動きベクトルVの終点の軌跡Lが表示される。そのため、時間経過に伴う動きベクトルVの変遷が非常にわかりやすい。図16に示すタイプでは、図14と同様に、対象画像データの補正結果として、順次生成される複数の動きベクトルVが表示されるが、X軸とY軸のほかに、時間軸tが追加されている。図17に示すタイプは、3次元のボリュームデータの補正結果を表示するものであって、図14と同様に、対象画像データの動きベクトルVだけが表示される。
【0169】
以上のように、モニタ12に表示される診断画像に補正結果が表示されると、操作者は、補正結果を認識しやすいばかりか、安心して補正機能を使用することができる。
【0170】
(第12の実施形態)
本実施形態では、取得された動きベクトルの応用例に関するものである。取得された動きベクトルは、例えば、パルスウェーブにおけるレンジゲートを動かすために使用される。この場合、パルスウェーブドプラのレンジゲートが所望の血管部分に設定されると、被検体Pや超音波プローブ11が多少動いても、所望の血管部分からの信号を継続的に取得することが可能となる。なお、動きベクトルは、パルスウェーブドプラのレンジゲートだけでなく、カラーROIの位置補正や、被検体の同一断面の保持、輝度解析ソフトウェアの関心領域追従のために使用されることもある。
【0171】
逆に、パルスウェーブのレンジゲートやカラーROIの位置を固定して、背景画像を補正すれば、操作者の関心領域を外すことなく観察することができる。これらは、特に、輝度の時間変化を観察する場合や、その他の解析画像に非常に有用である。
【0172】
本発明は、前記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、前記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0173】
12…モニタ、21…送受信ユニット、24…画像生成回路、25…制御プロセッサ、131a…数指定用トラックボール、131b…サイズ指定用トラックボール、132b…スタートボタン、132c…フラッシュボタン、ROI…関心領域。
【特許請求の範囲】
【請求項1】
造影剤が投与された被検体へ超音波を送信し超音波走査することにより、前記被検体の超音波画像を取得する超音波診断装置において、
前記超音波走査によりエコー信号を取得する送受信ユニットと、
前記エコー信号に基づき前記造影剤が映像化された複数の画像データを生成する画像データ生成ユニットと、
前記複数の画像データのうち第1の画像データに対して、画像領域全体より小さな関心領域を設定する設定ユニットと、
前記第1の画像データと異なる第2の画像データに対して、前記関心領域に対応する位置を検出することにより、前記第1及び第2の画像データとの間の動き補正を行う画像補正ユニットと、
前記動き補正後の画像データへ輝度値保持演算を施して表示画像を生成する画像生成ユニットと、
を具備する超音波診断装置。
【請求項1】
造影剤が投与された被検体へ超音波を送信し超音波走査することにより、前記被検体の超音波画像を取得する超音波診断装置において、
前記超音波走査によりエコー信号を取得する送受信ユニットと、
前記エコー信号に基づき前記造影剤が映像化された複数の画像データを生成する画像データ生成ユニットと、
前記複数の画像データのうち第1の画像データに対して、画像領域全体より小さな関心領域を設定する設定ユニットと、
前記第1の画像データと異なる第2の画像データに対して、前記関心領域に対応する位置を検出することにより、前記第1及び第2の画像データとの間の動き補正を行う画像補正ユニットと、
前記動き補正後の画像データへ輝度値保持演算を施して表示画像を生成する画像生成ユニットと、
を具備する超音波診断装置。
【図1】

【図2】

【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】

【図16】

【図17】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−59679(P2013−59679A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2013−417(P2013−417)
【出願日】平成25年1月7日(2013.1.7)
【分割の表示】特願2007−2781(P2007−2781)の分割
【原出願日】平成19年1月10日(2007.1.10)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成25年1月7日(2013.1.7)
【分割の表示】特願2007−2781(P2007−2781)の分割
【原出願日】平成19年1月10日(2007.1.10)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]