
超音波造影画像において補充曲線フィッティングを用いる血流評価法
再潅流の際の局所的な造影剤濃度を表わす信号を供する破壊−再潅流過程から、局所的な組織の潅流に関する値を獲得することによって求める組織の潅流についての非侵襲的定量方法およびシステムである。本システムは、S形状特性を有する時間の関数を、再潅流の際の局所的造影剤濃度に比例した信号に適合させるか、もしくは、関連付ける手段と、S形状特性を有する関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流に関する値(例えば、平均速度、平均遷移時間、平均流量、潅流量)もしくは属性(例えば、血流パターン、流れ分布の分散もしくは歪度)の少なくとも1つとを対応付ける手段を有する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ガス充填微小胞の破壊/補充モニタリングを含む処理過程における血流評価手法に関する。ここでは、流れのパラメータは、補充の動力学を分析することで導出される。より具体的には、本発明は、生きている被験対象の組織における潅流の非侵襲的評価法に関する。また、本発明は、本方法を実施するコンピュータ・プログラム、および、当該プログラムを具現化した製品に関する。なおさらに、本発明は、潅流の非侵襲的定量のシステム、および、当該システムで使用する装置に関する。
【背景技術】
【0002】
キャリア液において、効率的な超音波反射体として気泡浮遊液を用いることは、当該分野において周知である。超音波画像化を向上させる手段としてのこれら浮遊液の研究開発は、気泡となって溶解ガスが溶液から現われる程の、急速な静脈注射を観察した初期の観測に端を発する。血液に対し、気泡は著しく異なる音響インピーダンスを有するが故、血管内の気泡が、優れた超音波の反射体となることが見出されている。キャリア液に含めた気泡浮遊液を生きた生物体内へ注入することにより超音波検査の画像化能は目覚ましく強化され、よって内部器官の可視化能を向上させる。器官および深部にある組織の画像化が医学的診断を固める上で重要な場合もあって、これまでにも調製および投与が簡便で、最小限の不活性種を含み、かつ、長期保存および配給容易な、気泡を高濃度で含む安定な浮遊液(懸濁液)の開発に多大な努力が払われてきた。
【0003】
だが、水溶性媒体における自由な気泡の単純な分散についての実用上の関心は低い。なぜなら、これらの気泡は一般に、超音波造影剤として有用なほどに安定ではないからである。
【0004】
したがって、関心は、超音波診断や、その他の超音波による調査用に、気泡を安定化させる手法に注がれてきた。それらは例えば、乳化剤、油、増粘剤、もしくは糖を用い、また、いろいろなシステムにおいて、気体もしくはその前駆物質を同調させ(添加し)たり、カプセル化したりしている。このような安定化された気泡は、本分野では、一般に「微小胞」と称しており、これは大別すれば2つの主要カテゴリに分類される。安定化気泡即ち微小胞の第1のカテゴリは、本分野では、一般に「微小気泡」と称しており、これには、界面活性剤(つまりは、両親媒性物質)を有する非常に薄い包膜をその気液界面に備える気泡を含んだ水性浮遊液(懸濁液)が含まれる。微小胞の第2のカテゴリは、本分野では、一般に「マイクロバルーン」もしくは「マイクロカプセル」と称しており、これには、天然由来もしくは合成によるポリマーで形成した固体物質包膜で周囲を取り囲まれた気泡を含む浮遊液(懸濁液)が含まれる。これらとは別種の超音波造影剤としては、ポリマーまたはその他の固体からなる多孔性微粒子の浮遊液(懸濁液)がある。これは、微粒子の細孔(ポア)に気泡を捕捉し、気泡を輸送する。
【0005】
本発明は、これに限定されないが、特に、潅流、破壊、および、超音波造影剤(UCA)の補充をモニタリングすることを包含する技術を活用するための、ガスの微小気泡を含んだ水性浮遊液(懸濁液)を含めた超音波造影剤(UCA)の使用と関連性を有する。ガス充填マイクロバルーンを本願の方法で用いることも好都合である。
【0006】
一般に、微小気泡は、本質的に、両親媒性物質の層によって安定化された、ガスが充填された微小胞と定義される。微小気泡の水性浮遊液(懸濁液)は、一般には、粉末状両親媒性物質、例えば凍結乾燥したリポソームまたは凍結乾燥もしくは吹き付け乾燥したリン脂質溶液、を、空気またはその他の気体と接触させ、そして水性キャリアと接触させ、それから撹拌して微小気泡浮遊液(懸濁液)を作成することで調製され、また調製された後は直ぐに投与する必要がある。
【0007】
特許文献1(EP0458745)、特許文献2(WO91/15244)、特許文献3(EP0554213)、特許文献4(WO94/09828)、特許文献5(WO95/16467)は、ガスを充填した微小胞、特に微小気泡およびマイクロバルーン、を含む水性浮遊液(懸濁液)、ならびに、その調製法の例を開示する。
【0008】
1998年、研究者は、超音波画像化機器の作る画像面から、破壊の後の、微小気泡をベースにした超音波造影剤(UCA)の補充の速度(比率)をモニタすることを提案した(非特許文献1)。微小気泡の破壊の可能性は、局所的に、本質としては、画像面に対し、薬剤の所謂「負の大量瞬時投与(ネガティブ−ボーラス)」を与える効果をもたらす。これが起こらなければ、器官内においては原則として測定期間中ずっと、一定の薬剤の潅流がある。連続的な(換言すれば、所謂「リアルタイムの」)または間欠的(断続的)な(換言すればトリガーによる)画像化において、画像面でのUCAの再潅流の測度(比率)を観察すれば、その器官の潅流、換言すれば局所的な流れのパラメータの評価が可能である。
【0009】
この手法は、広範多岐にわたって用いられ、様々な出版物で常に報告がなされている。それらは、補充の映像や時間の関数であるドップラー信号を、一区画分の容積内の指標の希釈に関する動力学を記述する数式(増加型の単一の指数関数の形式の数式)を用いて最適フィットしている。以下の出版物例を参照されたい。
【0010】
非特許文献2の図8は、単一の指数関数でフィットした、パルス間隔に対する映像強度(輝度)の関係を示している。
【0011】
非特許文献3の図2は、パルス間隔に対する映像強度(輝度)の、単一の指数関数的な関係性を示している。
【0012】
非特許文献4の論文は、生理学的に異なる流れの条件に対する別種の再潅流濃度対時間の曲線について議論している。
【0013】
非特許文献5の図2および図3は、単一の指数関数でフィットした、時間に対する音響強度をプロットする。ここでは、記録されたデータは、薬剤の濃度に比例している。
【0014】
非特許文献6は、造影剤の補充について分析し、さらに、ウェイら(Wei et al.)の導入した単一指数関数を用いた非線形曲線によるフィッティングを行っている。
【0015】
非特許文献7の図7は、「1相指数結合方程式」("1-phase exponential association equation")を用いて、時間に対する映像強度(輝度)の曲線をフィットしている。
【0016】
特許文献6(WO02/102251)は、微小気泡の破壊/補充について記載し、また、その図2bにおいて、時間に対する微小血管の映像強度(輝度)に関する単一指数関数が示されている。これによれば、微小血管の流れの強さは、単一指数関数の初期の傾きに対する正接として表される。また、図2cにおいて、パルス間隔に対する映像強度に関する単一指数関数が示されている(間欠モード)。
【0017】
本願の発明者は、先行する発見的手法で得られた結果は有望なものであると見ている。なぜなら、エコー信号を観測者に対して映像信号の形式で供する前は、あらゆるエコー画像化機器においてエコー信号は強度の非線形圧縮(対数圧縮とも称する。)を受けているからである。よって、単一指数関数(monoexponential function)で映像データをフィッティングすることにより、実際的な局所的な器官の潅流に関連した流れの評価を行うことが可能である。これについて、これまでのところ、満足のいく結果が得られている。
【0018】
しかし、本願の発明者は、周知の手法は、受信器のゲインや、対数圧縮、等といった、使用者が選択する機器設定に対し非常に敏感であると考えている。さらに、抽出されるパラメータは、機器の種類毎に固有のものがあり、異なる設備または設定を使用する研究者間での比較が困難である。また、現在の先端的手法により抽出される潅流のパラメータは、相対評価である。よって、流れのパラメータの絶対的定量評価に不適である。
【特許文献1】欧州特許出願公開第0458745号明細書
【特許文献2】国際公開第91/15244号パンフレット
【特許文献3】欧州特許出願公開第0554213号明細書
【特許文献4】国際公開第97/09829号パンフレット
【特許文献5】国際公開第95/16467号パンフレット
【特許文献6】国際公開第02/102251号パンフレット
【非特許文献1】ウェイ、K.、ジャヤウィーラ、A.R.、フィルーザン、S.、リンカ、A.、スカイバ、D.M.、およびカウル、S.(Wei, K., Jayaweera, A. R., Firoozan, S., Linka, A., Skyba, D. M., and Kaul, S.) 「クアンティフィケーション・オブ・マイオカーディアル・ブラッド・フロウ・ウイズ・ウルトラサウンド−インデュースド・デストラクション・オブ・マイクロバブルズ・アドミニスタード・アズ・ア・コンスタント・ベーナス・インフュージョン」("Quantification of Myocardial Blood Flow With Ultrasound-Induced Destruction of Microbubbles Administered as a Constant Venous Infusion")、 サーキュレーション(Circulation)、巻97、1998
【非特許文献2】K.ウェイ(K. Wei)、 ディテクション・アンド・クアンティフィケーション・オブ・コロナリー・ステノシス・セビリティ・ウイズ・マイオカーディアル・コントラスト・エコーカーディオグラフィ(Detection and Quantification of Coronary Stenosis Severity With Myocardial Contrast Echocardhiography)、 プログレス・イン・カーディオバスキュラー・ディジーゼズ(Progress in Cardiovascular Diseases)、44(1)、2001、81−100
【非特許文献3】ケビン・ウェイ、エリザベス・レ、ジャン−ピン・ビン、マシュー・コギンス、ジェレール・ソープ、サンジフ・カウル(Kevin Wei, Elizabeth Le, Jian-Ping Bin, Matthew Coggins, Jerrel Thorpe, Sanjiv Kaul)、 クアンティフィケーション・オブ・レナル・ブラッド・フロウ・ウイズ・コントラスト−エンハンスド・ウルトラサウンド(Quantification of Renal Blood Flow With Contrast-Enhanced Ultrasound)、 J.Am Coll Cardiol、37、2001、1135−40
【非特許文献4】カルチャクジャン、R.、バーンズ、P.N.、およびヘンケルマン、M.(Kharchakdjian, R., Burns, P. N., and Henkelman, M.)、 フラクタル・モデリング・オブ・マイクロバブル・デストラクション−リパーフュージョン・イン・アンリゾルブド・ベッセルズ(Fractal Modeling of Microbubble Destruction-Reperfusion in Unresolved Vessels)、 IEEE ウルトラソニックス・シンポジウム(IEEE Ultrasonics Symposium)、2001
【非特許文献5】リム、S.−J.、レオン−ポイ、H.、リンドナー、J.R.、カウンチャー、D.、エレガーラ、D.、マッソン、H.、デュリウ、M、カッセ、N.F.およびカウル、S.(Rim, S.-J., Leong-Poi, H., Lindner, J.R, Counture, D., Ellegala, D., Masson, H., Durieux, M, Kasse, N.F. and Kaul S.)、 クアンティフィケーション・オブ・セレブラル・パーフュージョン・ウイズ・リアル−タイム・コントラスト−エンハンスド・ウルトラサウンド(Quantification of Cerebral Perfusion with Real-Time Contrast-Enhanced Ultrasound)、 サーキュレーション(Circulation)、巻104、2001、2582−2587
【非特許文献6】シュロッサーら(Schlosser et al.)、 フィーシビリティ・オブ・ザ・フラッシュ−リプレニッシュメント・コンセプト・イン・レナル・ティシュー:ウィッチ・パラメーターズ・アフェクト・ジ・アセスメント・オブ・ザ・コントラスト・リプレニッシュメント?(Feasibility of the Flash-Replenishment Concept in Renal Tissue: Which Parameters Affect the Assessment of the Contrast Replenishment?)、 ウルトラサウンド・イン・Med.& Biol.(Ultrasound in Med. & Biol.)、巻27、2001、頁937−944
【非特許文献7】マーシー、TH、Li、P、ロクビッキオ E、バイシュ C、ダイリワラ I、アームストロング WF、バナン M.(Murthy TH, Li P, Locvicchio E, Baisch C, Dairywala I, Armstrong WF, Vannan M.)、 リアル−タイム・マイオカーディアル・ブラッド・フロウ・イメージング・イン・ノーマル・ヒューマン・ビーイングス・ウィズ・ザ・ユース・オブ・マイオカーディアル・コントラスト・エコーカーディオグラフィ(Real-Time Myocardial Blood Flow Imaging in Normal Human Beings with the use of Myocardial Contrast Echocardiography) J Am Soc Echocardiogr、14(7)、2001、698−705
【発明の開示】
【発明が解決しようとする課題】
【0019】
本願発明は、先述の指標希釈の理論(the indicator-dilution theory)より導出される数式(所謂、単一指数関数)が、画像面もしくは断層撮影のスライスにおける破壊の後のUCAの再潅流の動力学を正しく記述していない、という事実に端を発し成された。
【0020】
本発明は、新しい手法を提示することにより上述の問題を解決する。本手法は、原則的には使用者および機器に依存する流れのパラメータ評価について、純然たる物理学上の術語による物理学的意味を与える。
【課題を解決するための手段】
【0021】
本発明は、ある態様においては、生きた被験対象の組織における潅流の非侵襲的定量方法を提供する。本方法は、先ず、エコー信号のシークエンスを供給するステップを実行する。このエコー信号のシークエンスは、組織内における画像化のための造影剤の補充を示唆するものである。パラメータを備えた時間に関するS形状関数(パラメトリックS形状関数)を、エコー信号と関連付ける(つまり、合致または関係付けさせる)。そして、S形状関数の1つもしくは複数のパラメータの少なくとも1つの値と、局所的組織潅流値(例えば平均速度、平均流量、潅流量)の少なくとも1つ、もしくは、属性(例えば、血流パターン)との対応付けを行う。
【0022】
本願明細書および請求の範囲において定義される、S形状関数またはS形状特性を備えた関数は、実質的に一定な初期値を有する初期部と、実質的に一定な最終値を有する最終部と、初期部と最終部との間にあって初期値から最終値に向かってS形状関数が単調に変化する中央部とを含む数学的関数である。この関数は、その中央部において、二次導関数が少なくとも一度はゼロとなることが好ましい。また、このS形状関数は、その初期部および最終部において、一次導関数は原則としてゼロであることが好ましい。S形状関数の例としては、「誤差関数」、双曲正接、シグモイド関数、累積正規分布関数、累積対数正規分布関数、もしくはこれらの多項式近似がある。
【0023】
本発明のある実施形態においては、造影剤は、音響エネルギを反射する能力を備えた微小胞を含む。エコー信号のシークエンスを供給するステップは、超音波画像化装置の画像化面(画像面)に超音波パルスを与えるステップを含み、この与えられる超音波パルスは、画像化面に存在する微小胞の大部分を破壊するに十分な大きさである。そして、別の超音波パルスのシークエンスが画像化面に与えられる。この、別の超音波パルスは、微小胞の大部分が保存(維持)される程度の小さな音圧を有する。この、別の超音波パルスのシークエンスを与えるステップは、所定の時間間隔(predetermined subsequent instants)で繰り返される。そして、この別の超音波パルスにより画像化面から発せられたエコー信号を記録し、先述の時間間隔毎の画像化面における微小胞の補充をモニタする。
【0024】
別の向上点としては、エコー信号が、S形状関数を関連付けする前に、処理される点がある。特に、エコー信号は、微小胞の局所的濃度に比例して形成される。このようにして処理されたエコー信号は、画像化面内の位置における造影剤の濃度に比例するように形成される。超音波ビームの幾何形状およびUCAの破壊の程度に基づいて、本発明は、その一実施形態においては、画像化面での平均流速と、定常状態のUCA濃度の2分の1に到達するために要する時間とを関係付けする。これは、先述のS形状関数の最適フィットより求められる。S形状潅流関数を、UCAにより生成されるエコー信号にフィットさせることが好ましい。エコー信号の瞬間振幅は、これらエコー信号を生成したUCAの局所的濃度に比例する。この比例関係は、一般に、超音波分析から得た最終データを適切に線形化して求める。このデータは、通例、2種類存在する。第1種のデータは、「イメージ(画像)」と称され、アナログもしくはデジタルの映像信号、または、その他のグレースケールもしくはカラー化した振幅二次元マップ(2Dマップ)として表わされたエコー信号を含む。この信号は、生成されたエコー信号の、非線形ダイナミックレンジ圧縮(例えば、対数圧縮)が含まれる処理より得る。イメージ(画像)は、通例、所定の大きさを有するイメージ・エレメント(画像要素(ピクセル(画素)))を有する。第2種のデータは、「ロー(生の)」エコー信号と称され、超音波エコーの振幅に比例した振幅を有する信号を含み、この信号は、通例、超音波装置から直接的に得る高周波(rf)エコー信号である。
【0025】
本願で使用する用語「線形化」または「線形化信号」は、超音波エコー信号を生成した局所的UCAの濃度と正比例する振幅を有するように処理した超音波エコー信号を指す。これは、ランダムに間隔をおいて存在する散乱体の集団による音響エネルギ散乱の性質を反映している。音圧に比例したrf信号または復調rf信号を取り扱う場合、生のエコー信号の振幅を適切にスクエアリング(squaring)することで、線形化可能である。あるいは、対数圧縮したイメージ(画像)を取り扱う場合、各ピクセル(画素)の振幅値を適切に逆対数圧縮してスクエアリングすることで、線形化可能である。このようにして、処理された信号の振幅とUCA濃度との比例関係が求められる。
【0026】
あるいは、「非−線形化」エコー・データ(例えば、イメージ)、換言すれば、局所UCA濃度に比例しないデータに、S形状関数をフィットさせることもできる。この場合、非−線形化データにフィットさせるべく選択したS形状関数は、UCA濃度とエコーデータとの間に非線形性を生じせしめた過程と同様の過程(例えば、S形状関数の平方根や対数圧縮)により修正される。
【0027】
曲線フィッティングが実施されるエコー信号は、通例、超音波装置の画像化面に超音波パルスのシークエンスを与えることで得られる。そして、画像化面内の微小胞の補充のモニタリングは、画像化面に含まれる微小胞に由来する超音波エコー信号の振幅を(時間の関数として)記録することでなされる。
【0028】
組織内での画像造影剤の補充を示唆するエコー信号シークエンスの供給工程は、以下のステップを含んでよい。
−UCAを一定的に器官もしくは関心領域に供給する、または、この破壊−補充方法に必要な数秒間の間、一定的であって十分なUCAの潅流が可能な条件を満たすようにUCAを大量瞬時投与(ボーラス)として注入する。
−UCA破壊フレームの適用の直前の、関心領域のエコー信号を、微小胞の破壊が可能となる所定の閾より小さい音響エネルギで記録する。
−先述の所定の閾よりも大きくかつ画像化面に存在する微小胞のかなりの部分を破壊せしめるに足る音響エネルギを有する超音波パルスを用い、超音波画像化装置の画像化面にUCA破壊フレームを与える。
−UCA破壊フレームを与えた直後の、関心領域のエコー信号を、先述の微小胞破壊閾よりも小さい音響エネルギで記録する。
【0029】
以下のステップは、(例えば、上述の方法論により取得可能な、)組織内の画像造影剤の補充を示唆する、あらゆるエコー信号のシークエンスに対して実行可能である。以下のステップにより、組織の潅流パラメータを決定する。
−先述の信号を、局所的な基準についてS形状関数(例えば「誤差関数」のファミリー)に最適フィット評価する。この局所的基準は、使用者の選んだ関心領域(ROI)の内部であってよく、その局所におけるピクセル単位のレベルで最適フィットを行い潅流パラメータ・イメージ(画像)を作成してもよいし、もしくは、コヒーレントなビームを使用して信号を得た場合であれば、超音波画像のスペックルの性状から定めるピクセル群のレベルで最適フィットを行ってもよい。
−S形状の特性を備えた関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流値(例えば平均遷移時間、平均速度、平均流量、潅流量)の少なくとも1つ、もしくは、属性(例えば、血流パターン、流れの分布の分散(バリアンス)(variance)もしくは歪度(スキューネス)(skewness))との対応付けを行う。
【0030】
上記の最適フィット評価を実行する前に、エコー信号を処理(例えば線形化)し、局所的なUCA濃度に比例した、処理したエコー信号を求め、UCA濃度に比例したデータに対して最適フィットを実行することが好ましい。
【0031】
S形状の特性を備えた関数のパラメータの値と局所的組織潅流値との対応付けの例としては、破壊フレームで破壊された区域(もしくはスライス)の厚さの半分(half-thickness)を局所的パラメータ・フィットで求まる平均遷移時間で割った比を計算し、平均流速を評価することが可能である。
【0032】
別の例としては、最適フィットの値として得た振幅を、ひとたび目盛り付け(キャリブレート)(calibrate)した後は、分析している領域における血量に比例した量と解釈し、振幅と流速の積より流れの値を評価することに用いることができる。
【0033】
さらなる別の例としては、異なる流れの寄与の分布(例えば、分散や歪度)の態様を、個々の潅流の関数の総和をモデル化した最適フィット値より求めてもよい。
【0034】
これらの流れのパラメータの評価は、用いた関心領域(AOI)内に表示してもよいし、または、パラメータ・イメージの形式で二次元マップとして表示してもよい。
【0035】
上述の方法論で求めるS形状関数を用い、(例えば、別々の毛細血管における)遷移時間や再潅流での微小胞の速度の確率密度分布を評価することもできる。
【0036】
このため、本発明のある実施形態においては、S形状関数を、ウェーブレットに分解する手法により解析する。
【0037】
ウェーブレットに分解する手法を用いて解析を行う前に、局所的濃度に比例したエコー信号を2度微分することが好ましい。
【0038】
上記の分解に用いるマザー・ウェーブレットを定めるために、単一の流れの値のためのS形状関数を記述するのに用いた累積正規分布関数の二次導関数を利用してよい。
【0039】
ある別の実施形態においては、エコー信号を、1つまたは複数のステップからなる処理により分析し、異なる流れの遷移時間または速度における寄与の分布を評価する。
【0040】
具体的には、流れ遷移時間または速度の第1のセットを選択し、複数のS形状関数の線形結合を用いてエコー信号への最適フィットを構成し、第1の評価を行う。
【0041】
ある好適な実施形態例においては、第2の評価を行って流れ遷移時間または速度の第2のセットを定める。この場合、第2のセットを定める基礎として第1の評価を用いる。
【0042】
さらに、第2の評価を用いて第3の評価のための値の初期セットを得ることが望ましい。
【0043】
第2の評価ために、3次スプライン補外(cubic spline extrapolation)を利用してもよい。
【0044】
本手法をさらに改善するために第3の評価を行ううえでニューラル・ネットワーク解析を用いてもよい。
【0045】
一般に、ニューラル・ネットワークは、(流れ遷移時間もしくは速度のための)複数の重みと(重み付けされた流れ遷移時間もしくは速度のための)複数のバイアス値で定まる。ニューラル・ネットワークの学習は、バイアス値および重みの反復的調整による。バイアス値および負の重みは、周期的にゼロにリセットすることが望ましい。
【0046】
好適な実施形態においては、上記のリセットは、50ないし100のイタレーション回数に等しい周期で実行される。
【0047】
別の改善法としては、第1の評価は、16個以下の、好ましくは8個以下のS形状関数を用いて行われることが望ましい。
【0048】
また、第2の評価は、少なくとも8個、好ましくは16個の流れ遷移時間または速度からなるセットを用いて行うことができる。
【0049】
本発明は、その別の態様では、上述の方法を実行するためのコンピュータ・プログラムを提供する。
【0050】
本発明は、さらなる別の態様では、上述のコンピュータ・プログラムを具現化したプログラム製品を提供する。
【0051】
本発明は、なおさらなる別の態様では、生きた被験対象の組織における潅流の非侵襲的定量に適したシステムを提供する。
【0052】
本発明は、上記とは別の態様では、上記のシステムにおいて使用する装置を提供する。このような装置は、エコー信号を入力する手段を備える。
【0053】
以下、より具体的に示す。
(1)本発明による方法によってS形状関数から抽出されるパラメータは、用いた設備または設定に依存しない。よって、異なる設備または設定を用いた研究者間で比較を行うことができる。さらに、これらの抽出されたパラメータは、絶対的な定量評価に適している。
【0054】
(2)本発明は、インビボでの血流のパラメータを簡便に定量する方法を提供する。この方法は、実際の器官の潅流が非常に複雑であるにもかかわらず驚異的な性能を示す。走査面に垂直な方向の平均流速の評価が、異なる速度および異なる任意の方向に向かって生じている流れの寄与の重畳がある場合であっても、可能である。
【0055】
(3)本発明によれば、エコー信号のパワーと局所的微小胞濃度との対応を考慮しつつ、高さ方向について超音波プローブの音響的感度の特性を取り込んだパラメータ表現に基づいて曲線フィッティングを行うことができる。そのため、選択したフィッティング関数をどのように修正しようとも、対応する特性は保存される。この条件、および、高さ方向に関する微小胞破壊区域の幅に関する知見に基づき、統計学的分布(例えば、流れ遷移時間もしくは速度)のみならず、絶対的な血流のパラメータを評価することができる。
【発明を実施するための最良の形態】
【0056】
添付の図面は、例示を目的とする。
【0057】
以下の説明で用いる記号を次のように定義する。
x 画像化面内の空間座標。ビームと垂直な(横)方向。
y 画像化面と交差する空間座標。ビームと垂直な(高さ)方向。
z 画像化面内の空間座標。ビームと平行な(深さ)方向。
D 高さ方向(y)における微小胞破壊の空間的範囲。
f 超音波の振動数。
c 音速
λ 超音波の波長
m 自然対数の平均
s 自然対数の標準偏差
μ 対数正規分布の平均
σ2 対数正規分布の分散
γ 対数正規分布の歪度(ゆがみ)
τ 破壊区域縁部から中心までの流れ遷移時間
τmean τの平均
C 微小胞の確率密度または相対濃度
A パラメータ方程式の振幅係数
O パラメータ方程式のオフセット係数
a y方向のハーフ・アパーチャ幅
v 局所的流速(vx,vy,vz成分)
KTx,KRx 送信および受信における2a/λzパラメータ
K K2=KTx2+KRx2で定める送受信パラメータ
Y Y=Kyなる無単位の変数
θ 流れの方向と、画像化面法線とのなす角
β 単一指数関数の「速度」項
GL 映像信号のグレーレベル
t 時間
dt ウェーブレット解析における時間サンプル
η 累積対数正規確率分布関数の偏差項
Γ 任意比例定数
【0058】
本発明は、微小胞による超音波造影剤(UCA)の再潅流の動力学の研究に基づく器官の潅流の定量方法を提案する。本方法は、UCAを調製し、器官もしくは関心領域においてUCA濃度が定常状態に達するまで(通例5ないし30秒間)待ち、画像化面を含むスライス内においてUCA微小胞を破壊せしめるに十分な大きさの音圧の造影剤−破壊フレームを1つもしくは複数個与え、そして、再潅流の、もしくは補充の、動力学をモニタリングするステップを要する。上述したように必要とされる定常状態の潅流に到達させるには、UCAを持続的に注入するか、または、数秒(通例1ないし15秒)の間、ほぼ一定な注入速度を達成するように大量瞬時投与することで実現可能である。
【0059】
<再潅流の動力学>
再潅流の動力学を、局所的UCA濃度に比例した線形化信号、つまり、後方散乱音響パワーに比例した信号、を基に分析する。そうすれば、補充の動力学から潅流パラメータを推定可能である。従来の超音波画像化は、「Bモード」でも「2Dドップラー」でも断層撮影法的手法であって、このような手法では、組織のスライスを合焦させた音響ビームを高速で走査させることにより調査を行う。これらの画像化モデルでの空間的解像度は、3つの次元:画像化面内における音響ビーム幅を横断する方向として定められる横方向、画像化面におけるビーム伝播方向に平行な軸方向、および、画像化面に垂直な方向である高さ方向、のそれぞれにおける様々な深さにおける送受信超音波感度分布によって主に支配される。
【0060】
十分に大きな音圧を加えることでUCA微小胞が破壊されるスライスの厚さは、高さ方向に関する音響ビーム幅および実際に加える音響レベルによって決まる。補充フェーズの間の、UCA微小胞の、破壊のあったスライスのボリューム内への再流入の検出は、超音波検査機器のビームの高さ方向に関する空間感度に基づいて超音波検査機器によって検出される。本願の出願人は、時間の関数として観測されるエコー・パワーと、再潅流の動力学との間の関係性が、高さ方向に関するパルス・エコー・モードの空間送受信分布により一意的に決定されることを発見した。それに対し、一般に受け入れられたこの関係性に対する概念は、指標−希釈の理論からの借用であって、この理論は、均質な媒体におけるランダムな指標の希釈による指標濃度の時間発展を記述する理論である(例えば、ウェイ、K.、ジャヤウィーラ、A.R.、フィルーザン、S.、リンカ、A.、スキフ、D.M.、および、カウル、S.(Wei, K., Jayaweera, A. R., Firoozan, S., Linka, A., Skyhu, D. M., and Kaul, S.)、「クアンティフィケーション・オブ・マイオカーディアル・ブラッド・フロウ・ウイズ・ウルトラサウンド−インデュースド・デストラクション・オブ・マイクロバブルス・アドミニスタード・アズ・ア・コンスタント・ベーナス・インフュージョン」("Quantification of Myocardial Blood Flow With Ultrasound-Induced Destruction of Microbubbles Administered as a Constant Venous Infusion")、サーキュレーション(Circulation)、巻97、1998)。これまでの研究者は、大抵の場合、研究手法を造影剤の補充の間観測される映像強度(輝度)レベルに依っていた。このレベルは、超音波検査機器のいわゆる「対数圧縮」を大いに被っている。よって、以下の一般形で表わされるような単一指数関数を再潅流動力学モデルとして選択していた。
【数1】
ここで、Aは、定常状態振幅であり、βは、単一指数関数の「速度」項であり、時間の原点を、最後のUCA破壊パルスの直後とする。先行技術においては、(例えば、先述のウェイら(Wei et al.)の引用文献においては、)値A、β、およびAβの値は、通例、分析している領域における「血量」、「血流速」、および「血流」に比例する値であると解釈される。しかしながら、この手法は所与の時刻における局所的UCA濃度に比例する関数に基づくものではなく、よって、例えば、ゲイン、対数圧縮パラメータ等の使用者による設定に対する著しい鋭敏性に悩まされている。
【0061】
本発明は、実際の器官の潅流(微小胞の構造、ランダム化している流れ、異なる流れの値の和、等)が非常に複雑であっても、インビボ下で驚く程に上手く機能する簡便な定量方法を提供する。
【0062】
十分に大きな音響強度のパルスを用いたUCA破壊フレームを適用することで、高さ方向については超音波ビーム圧分布によって定められ横方向については超音波プローブの走査する領域の広がりによって定められるボリューム(容積)内のUCA微小胞が欠損させられる。この、UCA破壊フレームを決定する高音響強度パルスは、単一のパルス(単パルス)でもよいし、好ましくは、超音波画像化装置の画像化面内で異なる方向に向けて発せられる複数の単パルス(パルス・シリーズ)であってもよい。UCA破壊フレームは、単一のフレーム(単フレーム)または上述の画像化面に対し順次的に発せられる複数のフレームでもよい。例えば、深部領域にある微小胞の大部分を破壊するには、複数の破壊フレームが必要な場合がある。先述のとおり、発する音響的エネルギー・レベルは、所定の閾よりも高く、UCA微小胞を破壊し得ることが必要である。特に、このレベルは、画像化面内に存在する微小胞の大部分を破壊しうる大きさであることが望まれる。「大部分」を破壊とは、破壊の直後から定常な潅流状態に達するまでの時間に計測した値、つまり、微小胞から受信したエコー信号に実質的な変動が検出される程に、多くの量の微小胞が破壊されることを意味する。実用上は、画像化面内の微小胞の少なくとも50%を破壊すれば、好ましい実験データを得るには十分である。このましくは、破壊される微小胞の量は、少なくとも75%であって、さらに好ましくは90%、なおさらに好ましくは100%である。
【0063】
図1aを参照すれば、超音波検査画像における、破壊された領域に補充される、UCA微小胞の再出現の速さは、原則的には画像内の各場所における局所的な血の潅流の速度と高さ方向における超音波プローブの音響的感度パターンとに支配される。この再潅流の速度、およびさらに一般的には潅流のパラメータの値は未知の変量であり、その評価は、局所組織の病態を診断する臨床医に有益な情報をもたらす。
【0064】
高さ方向の音響的感度パターンは、後で議論するパラメータである。なぜなら、これに対する知見は、本発明を理解する上での基礎となる。連成波モードで励起される矩形形状の合焦アパーチャ領域における高さ方向yについての音圧分布は、次式で近似的に定めることができる。
【数2】
ここで、Γは任意の比例定数であって、
【数3】
であり、「sinc」関数は、
【数4】
であり、fは超音波の振動数、cは伝播媒体中の音速、λは超音波の波長、aは、トランスデューサの高さ方向に関するハーフ・アパーチャであり、zは、トランスデューサのプローブから関心のある深さまでの距離であり、yは、高さ方向における軸外距離である[例えば、キンズラー、LE、フレイ、ARら(Kinsler LE, Frey AR et al.)、ファンダメンタルズ・オブ・アコースティックス(Fundamentals of Acoustics)、J. Wiley & Sons、1982]。パルスによる励起の場合、これは、一般には超音波検査における画像化モードの場合に相当するが、ピーク圧分布のメインローブは、音響パルス波形の中心(または平均)振動数近傍の振動数においては、連成波の場合とよく一致している。
【0065】
局所的に検出された信号の振幅と、局所的UCA濃度との対応を付けることに興味が向かう。そのため、感度パターンを、エコー信号強度を用いて表わすことが望まれる。このパターンは、送信および受信の分布の複合的な影響によって決定可能であって、通例、これらの分布は相違する。超音波トランスデューサにおいては、その高さ方向について、送信においては、音響的パワー分布PTx(y)は、上記の圧分布の自乗により近似的に決定される。例えば、矩形のアパーチャの場合、次の形式を有する関数で表現することができる。
【数5】
ここで、KTxは、超音波の送信条件により定まる。実際には、このパワー分布は、ガウス関数GTx(y)により近似可能である。
【数6】
【0066】
受信モードにおいては、PRx(y)について同様の近似を行うことで次式が得られる。ここで、KRxは、超音波の受信条件により定まる。
【数7】
【0067】
パルス・エコーの場合、軸外の標的に対する超音波トランスデューサのパワー感度PE(y)は、その第1近似においては、送信ビーム分布PTx(y)と受信ビーム分布PRx(y)の積より定める。送受信感度パターンPE(y)は、ガウシアンG(y)を用いて次式のように近似される。
【数8】
よって、送受信のK値の定義は、次式のように導かれる。
【数9】
【0068】
任意の矩形形状を有するトランスデューサのメインローブに関するPE(Y)のG(Y)との密接な対応関係を図1bに示す。ここで、無単位量
【数10】
は、−1から+1までの範囲である。
【0069】
いずれの場合であれ、本願の主目的たる流れの評価方法を説明する上では、この分布の厳密な形状について議論する必要はない。当該超音波画像化および音響学分野の技能を有する者であれば、画像内の異なる深さまたは部分についてKおよびDの値を決定することで、本願発明を、様々な所与の超音波画像化システムの実際のビーム感度パターンおよび微小胞破壊の程度に対して適応させることができる。これらの決定は、後で説明するが、個々のプローブおよび動作条件に対し、簡単なキャリブレーション手続きを一度だけ実行するだけでよい。
【0070】
特に、Kの値は、上述のように理論的に定めることもできるし、または、高さ方向に画像化面を横断して小さな点反射体を走査して記録されたそのプロファイルを高さ方向変位に関する最適フィットガウス関数で調整するようにして送受信ビーム強度を測定し、実験的にKの値を定めてもよい。
【0071】
UCA微小胞が、スライスのボリューム内へ再流入する際、先ず、画像化面に対して垂直な方向への運動を仮定すれば、UCA微小胞の局所的濃度に比例する線形化エコー信号は、高さ方向についてビーム感度で重み付けした送受信パターンで捕らえられる微小胞の割合が増加するように定まる。唯一の値を有する均一濃度のUCA微小胞が、位置y’、
【数11】
までスライスに再流入した場合、ビーム感度PE(Y)により検出される超音波検査のパワー信号E(Y’)は、積分項を含む数式で表わすことができる。
【数12】
【0072】
<「誤差関数」を用いた本発明の実施>
関数PE(Y)が、ガウス関数G(Y)に非常に似ている、というPE(Y)の実際の性状を考慮し、出願人は、エコー・パワー・信号E(Y’)を、「誤差関数」erf(q)を用いて表現することが有効であると考える。誤差関数は次式で定義されるものである[例えば、アブラモビッツ、M.およびステガン、I.A.(編)(Abramowitz, M. and Stegun, I. A. (eds))の、ハンドブック・オブ・マセマティカル・ファンクションズ(Handbook of Mathematical Functions)内の、ガウチ、W.(Gautschi, W.)、「エラー・ファンクション・アンド・フレネル・インテグラルズ」("Error Function and Fresnel Integrals")、ドーバー・パブリケーションズ・インコーポレイテッド(Dover Publications Inc.)、ニューヨーク(New-York)、1972、頁297−329]。
【数13】
【0073】
この定義は、erf(0)=0、erf(−q)=−erf(q)、および、
【数14】
なる性質を有する。一方から(例えば、負の値のY)から、破壊されたスライスへ微小胞が補充されるような物理的状況に対しては、所謂「累積正規分布関数」を使用するのが正しい。この関数を、潅流評価という文脈より、perf(q)と称する。perf(q)は次式で定義される。
【数15】
この関数は、
【数16】
および、
【数17】
なる性質を有する。さらに、perf(q)は、erf(q)を用いて以下のように簡単化することができる。
【数18】
【0074】
上記の定義では、関数perfは、グラフ的には、S形状関数であり、この関数は、図2に例示するように、−∞からYまでの積分で表わす、ガウス分布した送受信ビームG(Y)の感度プロファイルのエネルギである。この関数は、微小胞破壊の後の再潅流過程の開始に対応する初期の実質的に平坦な部分(プラトー)、中央の傾斜部、および、潅流の完了した定常状態に対応する最終プラトー部を有する。本発明のS形状関数はいずれも、データ記録した期間が、最終的定常状態を推定するには不十分な場合、破壊パルスを加える直前に計測された定常状態値を、再潅流信号の漸近的定常状態の予想値として用いてよい。
【0075】
破壊された微小胞の領域が画像化面の両面より対称的に厚さDで延在するとすれば、Yの負および正方向に両方にプローブ軸からD/2の距離の位置を定める。新しい微小胞の流れは、流速vでY方向に破壊されたスライスに補充される。非破壊的なモニタリング・フェーズにおける、時間の関数であるエコー・パワー回復関数E(t)は、以下の一般形で、perf関数を用いて表わされる。
【数19】
ここで、D/2vは、微小胞が破壊された領域の縁部から画像化面中心部に到達するのに必要な時間遅れτである。このようにして、流速vは、局所的微小胞濃度がその最大(または定常状態)値の半分に達するのに必要な時間遅れの測定より実験的に直接的に評価することができる。「平均遷移時間」とみなしてもよいこの遅れは、実験的な線形化エコー・パワー信号を振幅およびオフセットの項に加えて遅れのパラメータτを含むパラメータ方程式で最適フィットさせることで容易に評価可能である。画像化面に垂直な、一定でありかつ均一な流れの場合、これらのパラメータ・フィット方程式F(t)は、次式の形式で表わすことができる。
【数20】
ここで、パラメータO、A、およびτは、それぞれオフセット、振幅、および遷移時間遅れの最適フィット値を表わし、分析している領域における流速は、v=D/2の関係より評価可能である。
【0076】
この流速評価のために必要な先験的知識は、走査面の周りに広がる破壊された微小胞の局所的厚さDのみであり、この値は、各プローブ種、超音波検査機器、および、動作モードについて一度だけ、適当な近似を用いて深さ(デプス(depth))の関数としてマッピングすればよい。異なる深さにおけるDの値は、例えば、ゲル内のUCA微小胞に当てはめて直接的な光学的観察によって破壊された微小胞の程度を評価するといった実験的手法により決定可能である。あるいは、インビボまたはインビトロにおいて、第2の超音波画像化システムを用い、低い音響パワーで第1のシステムの画像化面に垂直な画像化面について破壊されたUCA微小胞の程度を視覚化することで、音響学的に定めてもよい。さらには、Dを、送信ビームのプロファイルおよびUCA微小胞の破壊に関する音圧の閾に関する知見に基づき、理論的に評価してもよい。組織による減衰を考慮するため、深さに関しD値に補正係数を追加してもよい。
【0077】
実際的には、破壊された領域の両方向から等しくUCA微小胞が補充されるが、上述のエコー・パワー補充関数はその場合も有効である。なぜなら、流れの方向は関係が無く、各瞬間において、微小胞の、ビーム内の大域的な濃度のみが問題だからである。
【0078】
また、本発明のS形状関数は、流れのパラメータを評価するためにエコー信号に関連付けされなければならないにも関わらず、特定の環境下では、データ・セットまたは最適フィット関数は、解析に用いるデータ・セットの限定された時間間隔においては、曲線フィッティングに用いる数学的関数のS形状特性を示さないこともある。このような場合は、例えば、高さ方向にて、超音波ビームの調査するボリューム(容積)内の微小気泡がほんの少しだけ破壊された場合や、または、例えば、早い流速がある場合にはフレーム・レートが有限である(制限がある)ため、実際の微小気泡の補充を十分にサンプリングできないような場合である。
【0079】
微小胞の速度ベクトルと走査面の法線とのなす角θが、ゼロ度ではなく、90度ではない任意の角度である場合、評価したvと、最適フィット・パラメータτとの関係は簡単に次式のように表せる。
【数21】
【0080】
流れの方向θに関する知見が無い場合、流速は、θ=0として評価され、その流速は、画像化面に垂直な速度成分vyに相当する。
【0081】
本方法の有する驚くべき特徴の1つは、走査面に垂直な方向の平均流速、
【数22】
の評価は、異なる任意方向θiの流速viからの寄与が重畳されている場合であっても、可能である点である。これについては、後で説明する。N個の異なる方向、および/または、N個の異なる速度で流れる微小胞の寄与がある場合、エコー信号のパワーは、次式で表わされる。
【数23】
ここで、
【数24】
および、
【数25】
であり、Ciは、速度Viyについての微小胞の相対濃度である。これは、個々のy方向についての相対速度で定義される。この場合、E(t)の形状は、もはや純粋なperf関数のものを示さない。
【0082】
<「対数perf(logperf)」再潅流関数を用いた本発明の実施>
実験的な再潅流のパワーのデータを上手く曲線フィットするため、換言すれば、上述のような異なる流れの総和として現われるパワーのデータを上手く曲線フィットするため、累積対数正規確率分布関数の形式を有する、経験的パラメータを備えたS形状関数を用いればよいことがわかった。これより説明にて用いるこの関数は、今後対数perf(logperf)再潅流関数、
【数26】
と称し、ここで、O、A、τ、およびηは、フィッティングのパラメータである。驚くべきことに、このlogperf(t)関数を用いて実験的な再潅流のエコー・パワー信号をフィットすると、平均遷移時間を上手く評価することができる。この平均遷移時間は、最適なフィットとなるτの値として求まる。フィッティング関数としてこのlogperfパラメータ関数を用いた例を図3aおよび図3bに示す。実験的データを求めるためには、ヴェルトマンら(Veltman et al.)らの開示による設定の1つと類似の設定を用いた(「オン・ザ・デザイン・オブ・ア・キャピラリー・フロウ・ファントム・フォー・ジ・エバリュエーション・オブ・ウルトラサウンド・コントラスト・エージェンツ・アット・ベリー・ロウ・フロウ・ベロシティーズ」("On the design of a capillary flow phantom for the evaluation of ultrasound contrast agents at very low flow velocities")、Ultrasound in Med. Biol.、28(5)、625−634、2002)。マイクロファイバ束(内径240μmのファイバ170本、Hospal AN69、フランス)は、微小気泡浮遊液(懸濁液)(およそ2−3μmの平均径を有し、全フッ素置換ブタンガスが含まれる、リン脂質安定化微小気泡)で潅流される。この微小気泡浮遊液(懸濁液)は、蠕動ポンプ(ギルソン・ミニパルス3(Gilson Minipulse 3)、フィリーア・ル・ベル(Villiers le Bel)、フランス)の制御の下、1ないし30mm/sの範囲の流速値を有する。マイクロファイバに沿って流れる微小気泡は、蒸留水に、およそ10の6乗気泡毎mL程度に希釈されている。
【0083】
使用した超音波検査機器は、エサチューン・スキャナ(Esatune scanner)(エサオテ、フローレンス、イタリア(Esaote, Florence, Italy)、)で、CnTI(S)(造影剤調整画像化)モードで使用した。共に用いたプローブは、LA532Eプローブである。送信周波数は、2.6MHzであり、フレーム・レートは、43Hzであり、再潅流モニタリングに関するメカニカル・インデックス(Mechanical Index)は、0.07であり、最大送信パワーで1秒間の破壊フレーム・シークエンスを用いた。プローブを、流れの方向と画像化面との成す角が50度となるようにしてマイクロファイバ束の断面画像を作成するように配置した。リアルタイムrf信号は、高速rfグラバ(fast rf-grabber)(FEMMINAの、スキャビアら(Scabia et al.)、「ハードウェア・アンド・ソフトウェア・プラットフォーム・フォー・プロセッシング・アンド・ビジュアライゼーション・オブ・エコグラフィック・ラジオ−フリケンシー・シグナルズ」("Hardware and software platform for processing and visualization of echographic radio-frequency signals");IEEE Trans. Ultra. Ferr. Freq. Contr.、49(10)、1444−1452、2002)を用いて、各破壊−補充シークエンスに対して15秒間収集した。使用者定義の関心領域(AOI)内の平均エコー・パワー信号を計算し、破壊後の、マイクロファイバ内のUCA微小気泡の補充を求めた。このデータ・ポイントは、図3aおよび図3bにおいて点で示している。流速値は、それぞれ4mm/sおよび8mm/sである。
【0084】
フィッティングを行う前に、Dの値を、光学的に、およそ5×10の6乗個毎mLの微小気泡を含む1.5%アガロース・ゲル内の破壊された区域の幅を計測することにより、7.2mmと定めた。logperf関数は、マットラブの曲線フィッティング・ツールボックス(Matlab Curve Fitting Toolbox)(マスワークス(MathWorks)、ナティック、マサチューセッツ、米国(Natick, MA, USA))で実現し、最適フィットは、トラスト・リージョン法(Trust Region method)(ビルド、R.H.、R.B.シュナベル、および、G.A.シュルツ(Byrd, R. H., R. B. Schnabel, and G. A. Shultz)、「アプロクシメート・ソリューション・オブ・ザ・トラスト・リージョン・プロブレム・バイ・ミニマイゼーション・オーバー・ツー−ディメンジョナル・サブスペーシズ」("Approximate Solution of the Trust Region Problem by Minimization over Two-Dimensional Subspaces")、マセマティカル・プログラミング(Mathematical Programming)、巻40、頁247−263、1988)を用いて計算した。最適フィットは、図3aおよびbにおいて実線で示す。図3aおよび図3bのそれぞれに関し、τmean値は、1.421および0.6714であり、η値は、0.6197、および、0.8079であり、A=1114および1258である。これら、τmean、θ、および、D値により、評価される平均流速値は、図3aおよび図3bのそれぞれについて、3.9mm/sおよび8.3mm/sである。これは、実値4mm/sおよび8mm/sとよく一致している。
【0085】
図4aおよび図4bに、単一指数関数フィットに基づく評価にかかる本発明の主たる有利点を示す。ここでは、2つの異なる機器ゲイン値(ハイ・ゲインは、ロー・ゲインの2倍である)で、角θを60度とし、流速値を増加させながら、上述したインビトロ設定を用いた。図4aは、先行技術による最適フィットにより得たβ値を示す。評価の線形性は良好であるが、用いた2つのゲイン値の間で顕著な差違が認められる点に注意されたい。例えば、流速20mm/sにおいては、βの評価値は、ロー・ゲインの場合およそ3.3s−1であり、ハイ・ゲインの場合およそ4.7s−1である。このことは、先行技術の方法は、システム依存性を有することを示している。図4bは、logperf関数を用いて最適フィット値を求めた場合における、D/(2τ)の評価値を示す。評価の線形性は良好でありかつ、評価の絶対値が、試験に用いた2つのゲイン値において、実値の5%以内(回帰直線に対し、
【数27】
)にある点に注目されたい。流速20mm/sの同様の例においては、D/(2τ)の評価値は、ロー・ゲイン値およびハイ・ゲイン値の両方において、およそ19mm/sである。このことが示すのは、本発明によるlogperf関数を用いた流速の評価は、絶対的な物理量と同様に、システムに依存しない、ということである。本発明による方法で抽出したパラメータは、このように、使用する設備や設定に依存しない。よって、異なる設備や設定を用いる研究者間で比較が可能である。さらには、これらの抽出したパラメータは、絶対的な定量評価に適している。
【0086】
<「対数正規」的流れ分布に対する本発明の実施>
UCAの補充分析を用いて、未知の組織内における対数正規流れ分布の平均(ミーン(mean))、分散(バリアンス(variance))、および、歪度(スキューネス(skewness))の最適な評価を算定することができる。このことは、微小血管網の構成に関する情報を与えてくれる。一般に、組織潅流は、平均遷移時間τを有する血管の対数正規分布で、疑連続的に表現される。組織に血液と同じ速度で微小胞が潅流する場合、微小胞濃度C(τ)の分布は、次式、
【数28】
のような形式を有する対数正規確率密度分布で記述され、ここで、mおよびsはそれぞれ、τの自然対数の平均および標準偏差である。対数正規分布の平均μ、分散σ2、および、歪度γは、
【数29】
【数30】
、および、
【数31】
で与えられる。上述の遷移時間の確率密度は、1に規格化されていることを確認する。
【数32】
【0087】
出願人の観察によれば、未知組織内の対数正規流れ分布の平均、分散、および、歪度の評価は、エコー・パワーE(t)を流れ遷移時間τの対数正規分布で重み付けした個々のperf関数の結合で表わすことで、可能である。本願ではlognormperf(t)と称するこの関数は、
【数33】
ここで、全ての変数は、先に定義したとおりである。
【0088】
図5aおよび図5bは、シミュレーション例を用いて2つの遷移時間の対数正規分布を例示している。ここで、一方は、σ2=0.5、γ=1.88であり、他方は、σ2=0.02、γ=0.34であり、両者においてτmean(=μ)=1.25である。これらの2つの分布より、図6aおよび図6bに示すような補充関数lognormperf(t)=E(t)が得られる。ここで、本例におけるパラメータは、O=0、A=1、D=7.2mm、θi=0、および、K=1.41mm−1である。図6aおよび図6bに示す2つの例の差違から、lognormperf(t)=E(t)の形状は、遷移時間分布の歪度(スキューネス)に対して依存性があることがわかる。その形状は、低歪度分布(γ=0.34)の場合、perf関数に非常に近く、高歪度分布(γ=1.88)の場合、より鋭敏な立ち上がりと緩やかな「肩部(ショルダー)」(定常状態値に近づく変曲度)を有するS形状を有する。
【0089】
図7aおよび図7bは、遷移時間の対数正規統計的分布に対する上述の考察を示す例図である。ここでは、図3aで用いたものと同じ実験データを例として用いている。本例においては、データ・ポイントは、lognormperf(t)のパラメータ表現形式を用いてフィットしている。この式では、流れ遷移時間の対数正規分布は、パラメータmおよびsを含む。Kの値は、測定にかかる物理的条件を考慮し、0.2761mm−1とした。つまり、a=2.5mm、f=2.6MHz、z=45mm、c=1480mm/s、送信および受信で同じ、とした。(D=7.2mm、オフセットO=0で)最適フィット値として得た値は、流速4mm/sおよび8mm/sに対しそれぞれ、μ=1.53および0.78、σ=0.47および0.39、γ=0.96および1.6、A=1114および1258である。これら2例に対応する流れ遷移時間の対数正規確率密度分布を図8に示す。関連して評価した流速は、θ=50度で3.7mm/sおよび7.2mm/sである。この例においても、実際に課された流速、4mm/sおよび8mm/sとそれぞれよく一致している。
【0090】
図6aおよび図6bに示す補充関数の注目すべき特徴は、これら2つの流速の条件からは大きく異なった歪度値を有する分布が導かれるにもかかわらず、対応する平均遷移時間評価値μ=τmeanが、定量的な意味で、実際の平均流速と一致することである。
【0091】
即ち、本発明による、気泡破壊後の、パラメータによる流れ評価は、関心のある深さ(デプス)のそれぞれにおける気泡破壊の厚さDに関する知見にのみ基づき画像化面に垂直な方向における平均流速の直接的な評価が可能である。
【0092】
例えば様々な器官における微小血管系を表現するために流速および遷移時間に関する対数正規分布を求めた場合、再潅流関数E(t)の実際の形状を分析すれば、流れ分布の分散および歪度を評価することができ、よって、組織の病態を診断することも可能である。このような評価は、実験的な線形化エコー・データから、perf関数もしくはperf関数の線形結合を用いて上述のようにして導出した曲線フィッティングパワー信号より行うことができる。
【0093】
<別のS形状関数による本発明の実施>
上述のperf関数は、高さ方向にガウシアン的なビーム感度を有する画像化面内における単一の流れのチャネルに関するエコー・エネルギの再潅流を正確に表わすのだが、例えば三角関数や多項式といったS形状関数の等価なパラメータ表現形式を用いても、実用上問題のない精度でerf関数を近似することができる。これら等価な形式は、erf関数を周知の方法で近似することで求めることができる。そのような例としては、
【数34】
ここで、a1=0.278393、a2=0.230389、a3=0.000972、a4=0.078108、ならびに、q≧0の場合、sign(q)=1、q<0の場合、sign(q)=−1、または、
【数35】
がある。また、これらに限るものではない。また、上記事実は、
【数36】
であることを意味する。
【0094】
これら近似的な表現形式を用い、観測された再潅流パワー関数を、対数正規分布といった流れ遷移時間もしくは流速の確率分布で重み付けしたperf関数の積分とフィットさせればよい。流れ分布の平均流速、分散、または、歪度といったパラメータを、観測したデータの最適フィットから評価することができる。これらパラメータの計算は、超音波検査画像内部で使用者が限定したエコー・エネルギ領域(「関心領域」)で求めてよい。この関心領域は、使用者がマニュアルで定めてもよいし、超音波検査画像に境界を描写する周知の方法や、解剖学的な器官の形態に基づいて自動的に定めてもよい。あるいは、個々の画像要素内でパラメータを計算してもよい。画像要素とは、例えば、デジタル映像のピクセル(画素)、画素群、局所的画像解像度より定まる個々のスペックル「粒(グレイン)」、もしくは、画像の自動的に決定されるその他の領域を含む。このパラメータ計算により、空間的パラメータ・マップ(spatial parameter cartography)として表示することができる。空間的パラメータ・マップは、パラメトリック画像化とも称される。この場合、使用者が関心領域を定める必要はない。
【0095】
<遷移時間または速度の確率密度分布評価>
上述のようにして本方法により求められたS形状関数を用いて(例えば、異なる毛細血管内の)再潅流の際の微小胞の遷移時間または速度の確率密度分布を評価することもできる。周知のことだが、健常な組織(つまりは、異常の無い場合)においては、微小胞の流れは血液と同じ速さで流れる。この場合、遷移時間もしくは速度の分布は、対数正規分布と一致する。故に、分布を評価することで、単に対数正規分布と比較すれば、生理学的異常性を検出することができる。
【0096】
我々は、確率密度分布関数を算定する新しい方法を開発した。この方法は、先述の関数のパラメータの少なくとも1つの値と、局所的組織潅流値もしくは属性を備えたS形状特性とを対応付けるような場合に特に有利である。しかしながら、以下に説明する新しい方法は、例えば、エコー・パワーの、時間の関数としての線形的増加および指数関数的減衰が特徴的に含まれるようなUCAの大量瞬時投与(ボーラス・アドミニストレーション)といった、別の潅流分析のような状況における確率密度分布関数の算定においても有用である。
【0097】
<ウェーブレット解析を用いた本発明の実施>
再潅流エコー・データを、遷移時間の対数正規もしくは正規分布の帰結と捉えるのではなく、未知の、個々のperf関数の総和の帰結と捉えて解析することができる。この場合、潅流関数の2次時間微分または平滑化もしくはローパス・フィルタをかけた潅流関数に適用した連続ウェーブレット分解が、流れ遷移時間の確率密度の評価の有用であることが判っている。ここでは、ウェーブレット・スケールおよび遅延の係数(delay coefficients)を評価するための「マザー・ウェーブレット」(または、モデル・ウェーブレット)は、速度vmwを有するperf関数の2次導関数を選択することができる。この関数は、ウェーブレットに関する定義からの要請の全てを満足する。連続ウェーブレット変換のスケールの係数scおよび遅延の係数delは、デジタル的表現では、気泡破壊区域のUCA補充という本説明の文脈を考慮して次式、
【数37】
および
【数38】
のように表わされ、ここでdtは、サンプリングの時間間隔である。
【0098】
図9a、b、c、dは、再潅流曲線の2次時間導関数に対して連続ウェーブレット変換を用いた、任意の遷移時間分布の評価の過程を示す図である。理論上の再潅流の例である図9aを解析する。この例は、実際には、およそ0.56秒および1.35秒あたりにそれぞれの平均値を有する複峰性の遷移時間分布として与えられる。この関数の2次導関数を、相対振幅スケールで図9bに示す。ウェーブレット分解に用いるマザー・ウェーブレットを図9cに示す。実際には、これは、基本的なperf関数の2次導関数により与えられる。図9dは、ウェーブレット分解の結果と、図9aの再潅流関数の生成に用いた本来の複峰性の遷移時間分布との比較を示す。この比較より、本発明の流れ分布評価の文脈におけるウェーブレット解析の実用性を確かめた。フーリエ、ラドン、ヒルベルト、Z−、もしくはその他の積分変換を用い、再潅流関数に関する同様の解析を行い、遷移時間分布の評価を行うことができる。これらの解析はいずれの場合においても、潅流遷移時間の値が個別的に、時間の関数として、本願明細書に開示のperf関数のタイプの寄与をパワーに対して及ぼす、という認識に基づいている。
【0099】
上記の手法により、観測された再潅流のデータのフィッティングを行う別の方法には以下のものが含まれる。それは、実験データに対し、例えば移動平均、ローパス・フィルタリング、メジアン・フィルタリング、等もしくはこれらの組み合わせといった既知の形式の平滑化または時間平均化を、曲線フィッティングの前に実行することである。これは、特定の場合において有利なことがある。さらに別の方法には、本願の開示するS形状フィッティング関数で、「非−線形化」エコー・データ(例えば、対数圧縮データ)を曲線フィッティングすることがある。ここでのS形状フィッティング関数は、エコー信号の非線形応答性をもたらした過程と同一の過程(例えば、S形状関数に対する対数圧縮)で修正を加えている。
【0100】
<ニューラル・ネットワーク解析を用いた流速の確率密度分布の再構築>
本発明の別の実施形態においては、再潅流エコー・データを、1つまたは複数のステップからなる処理により解析する。
【0101】
本解析の開始点は、上述のエコー・パワー補充信号E(t)である。
【0102】
明瞭な説明のため、関連する式を再掲する。高さ方向に関するパルス−エコー音響感度パターンPE(y)はガウシアンG(y)を用いて次のように近似される。
【数39】
【0103】
好都合にも、補充関数E(t)は次式、
【数40】
と表わされ、ここでは、
【数41】
【数42】
、および、
【数43】
であり、かつ、Oはオフセット係数であり、Aは、振幅係数であり、
【数44】
は、微小気泡が破壊区域の縁部から中心部まで移動するのに必要な遷移時間である。
【0104】
微小胞の速度ベクトルvとy方向との成す角がゼロ度および90度でない、任意の角θvである場合、perf(t)の定義(1.3)は、
【数45】
となり、ここで、
【数46】
かつ、
【数47】
であり、ここで、
【数48】
である。
vyは、y方向に沿ったvの成分であるとする、つまり、
【数49】
である。よって、
【数50】
であり、ここで、
【数51】
である。
【0105】
(1.6)は、定義(1.3)においてvをvyに、そしてτをτyにしたものに等しい。perf(t)(1.6)は、vyのみ、または、τyのみ、のいずれかを用いて次のように正確に表現することもできる。
【数52】
【数53】
【0106】
関心領域において、多くの毛細血管が存在し、各毛細血管は、唯一無二の再潅流速度で特徴付けられる。よって、各毛細血管の補充関数は、(1.7)または(1.8)(個別のperf関数)、
【数54】
または、等価的に、
【数55】
で与えられる。
【0107】
もし、P(vy)が、関心領域におけるy方向の速度成分の確率密度分布であれば、その領域におけるエコー・パワー補充関数E(t)は、各毛細血管による影響(作用)の確率で重み付けした、個別のperf関数の結合、
【数56】
として表わすことができる。
【0108】
(1.9)の離散形式は、
【数57】
である。
【0109】
確率密度分布P(v)は、正規化による特性、
【数58】
を満足し、よって、
【数59】
である。
τyを用いれば、
【数60】
となり、その離散形式は、
【数61】
であり、ここで、P(τy)は、関心領域における確率密度分布τyである。(1.11)および(1.12)と同様に、
【数62】
であり、
【数63】
である。
【0110】
表記の簡単化のため、以下の説明では、添え字Yは省略する。よって、表記vおよびτを、vyおよびτyの代わりとして用い、それぞれ、速度および遷移時間と称することにする。
【0111】
健常な組織(異常性の無い場合)の特徴として、微小気泡が、血液と同じ速度で流れる場合、P(v)は、対数正規確率密度分布、
【数64】
をとり、ここで、mおよびsはそれぞれ、vの自然対数の平均および標準偏差である。
【0112】
同様に、τを用いれば、健常な組織は、
【数65】
で特徴付けすることができ、ここで、mおよびsはそれぞれ、τの自然対数の平均および標準偏差である。
【0113】
図10は、対数正規をとる場合の補充関数の例を示す図である。この曲線を形成するために、式(1.10)を用いており、ここでは、
−対数正規確率密度分布のパラメータは、m=1.5、s=0.45であり、
−速度ベクトルは、
【数66】
であって、ここで、
【数67】
である。
【0114】
式(1.10)および(1.13)は、(個々の)perf関数の線形結合として補充関数を表わしている。実際のエコー・パワー補充信号は次式、
【数68】
で表わされ、ここで、E(t)は、(理論上の)補充関数であり、N(t)は、ノイズを表わす。
【0115】
故に、補充フェーズの各瞬間t1,...,tjにおいて記録される信号のベクトルは、
【数69】
と表せる。
【0116】
ここでの目的は、P(v)またはP(τ)の形式に関する情報を何ら仮定せずに、E’から、任意のi(∀i)について、P(vi)または、等価的に、P(τi)に関する良好な近似を求めることである。
【0117】
以下、vおよびτについて特に区別せずに、課題となっている定式化を行う。とくに、P(v)もしくはP(τ)の再構築については、区別せずに示す。これより、新しく開発した、単一もしくは複数のステップからなる方法を示す。この方法は、第1のステップについてMatlab(登録商標)のオプティマイゼーション・ツールボックス(Optimization Toolbox)、ならびに、第2およびそれ以降のステップについてMatlab(登録商標)のニューラル・ネットワーク・ツールボックス(Neural Network Toolbox)を用いて有利に実施することができる。
【0118】
<第1のステップの実行>
E’は、(1.16)による定義で、そして、sum_perf(p,t)を線形結合、
【数70】
で定義される関数とする。ここで、p=(p1,...,pn)は重み係数であり、nは、解析で考慮する流速の数である。次に、sum_perf(p)を、
【数71】
で定義されるベクトルとする。
【0119】
sum_perfをpの関数と考えるのであれば、pに関する関数f(誤差関数)は、
【数72】
と定義することができる。
しかして、ここでの目的は、制約付き(束縛されている)非線形多変数関数の最小、
【数73】
を、
【数74】
の条件で求めることである。
実際、制約(束縛)関数(1.18)の解pminを求めることができれば、簡単なルール、
【数75】
よりP(vi)の近似が可能である。
【0120】
さらに、補充関数の近似は、次式、
【数76】
により可能である。
【0121】
Matlab(登録商標)のプログラミング言語には、オプティマイゼーション・ツールボックス(Optimization Toolbox)と呼ばれる、最小化問題を解く上で非常に有用なツールボックスが含まれている。特に、Matlab(登録商標)の関数fminconは、初期推定から出発して複数の変数を有するスカラー関数に関し制約付き(束縛)状態での最小値を求めるものである。fmincon関数は、インテリア・リフレクティブ・ニュートン法(interior-reflective Newton method)に基づく部分空間信頼領域法(subspace trust region method)を用いている。インテリア・リフレクティブ・ニュートン法については、コールマン、T.F.、および、Y.リ(Coleman, T. F. and Y. Li)、「アン・インテリア、トラスト・リージョン・アプローチ・フォー・ノンリニア・ミニマイゼーション・サブジェクト・トゥ・バウンズ」("An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds")、SIAMジャーナル・オン・オプティマイゼーション(SIAM Journal on Optimization)、巻6、頁418−445、1996、および、コールマン、T.F.、および、Y.リ(Coleman, T. F. and Y. Li)、「オン・ザ・コンバージェンス・オブ・リフレクティブ・ニュートン・メソッズ・フォー・ラージ−スケール・ノンリニア・ミニマイゼーション・サブジェクト・トゥ・バウンズ」("On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds")、マセマティカル・プログラミング(Mathimatical Programming)、巻67、号2、頁189−224、1994に記載がある。各イタレーションにおいて、前処理付共役勾配法(preconditioned conjugate gradients)(PCG)を用いて大規模な線形システムの近似解を求めている。
【0122】
fの勾配に対する解析的な式を、fminconに与えており、勾配は、数値的に求めることがない。そのため、このアルゴリズムがより精確なものになっている。fminconに代入すべき初期推定の選定は、非常に重要である。実際、(制約付(束縛された))関数fは、数多くの極小を有しており、これにより補充関数E(t)の良好な近似を求めることが可能であるが、P(vi)は、良好な近似が得られるとは限らない。
【0123】
【数77】
の場合、次に示す初期推定を用いれば非常に良好な結果が得られる。
【数78】
【数79】
【0124】
所与の、関心を寄せている間隔における速度値は、その等差数列(算術数列)または等比数列(幾何数列)を用いて選ぶことができる。
【0125】
示す図である。速度ベクトル(1.15)(図10のサンプルを構築するのに用いたもの 図11は、図10に示す補充関数E(t)のサンプルから、P(v)を再構築する例をと同一、つまり、n=32)を用いたアルゴリズムを適用している。
【0126】
図12は、複峰性確率密度分布、
【数80】
ここで、
【数81】
の場合の再構築を示す図である。
【0127】
実際の実験による信号の場合にどのアルゴリズムが有効であるかを判断するため、次式、
【数82】
で構築したサンプルで試みてみる。ここで、N(t)は、瞬間の信号と比較して10%のエネルギ振幅を有するホワイト・ノイズ時系列信号である。
【0128】
図13は、対数正規P(v)の場合に(1.23)で構築した「ノイズを含んだ」("noisy")サンプルの図である。図14は、このノイズを含んだサンプルより得た、対数正規P(v)の再構築を示す図である。
【0129】
図14より、相対的に高いノイズを含む場合には精度が損なわれることが明らかである。よって、このような単一のステップによる方法は、ノイズが低いサンプルの場合には特に有用である。ノイズを含むサンプルに対しては、第2および第3のステップを備えた方法を完遂する方が有利である。その方法について、以下に説明する。先に第1のステップにおいて考察した際の速度の数nは、減少させている。
【0130】
<第2および第3のステップの実行(ニューラル・ネットワーク)>
ニューラル・ネットワークの基本的な対象は、ニューロン(neuron)である。シンプル・ニューロン(simple neuron)のモデルは、次のようにして記述することができる。スカラー入力uが送信され、スカラー重みpで強度を積算する接続部を通り、積p・uが求められる。この量もまたスカラーである。そして、p・uの総和(サム)およびバイアスbが、伝達関数gの項となる。この関数は、スカラー出力aを生成する。一般に、伝達関数は、階段関数、もしくは、シグモイド関数、または、恒等関数(id)である。
【0131】
ベクトル入力を備えるニューロンにおいては、入力uは、ベクトルu=(u1,...,un)であり、pは、重みベクトルであり、内積p・uは、バイアスbを伴って総和され、伝達関数gの項を形成する。この関数は、図15に示すように、スカラー出力aを生成する。
【0132】
先に述べたニューロンの2つまたは3つ以上をレイヤ(layer)において結合することができる。ニューラル・ネットワークは、このようなレイヤを1つまたは複数備えることができる。しかしながら、このような複雑なネットワークを詳細に考慮する必要性はない。実際には、ベクトル入力を備えたただ1つのニューロンで形成されたネットワークを用いれば十分である。ネット(net)を、このようなタイプのネットワークとし、g:=idをその伝達関数とする。ネット(net)は、Matlab(登録商標)の関数newlinで作ることができる。
【0133】
ニューラル・ネットワークは、特定の入力に対し特定の出力を行うように重みおよびバイアスの値を調整することによって学習させることができる。よって、ネットワークであるネット(net)の学習過程には、入力ベクトルu1,...,un、および、対応する目標出力ベクトルa=(a1,...,an)が必要である。学習の際、ネットワークの重みおよびバイアスは、反復的に調整され、ネットワーク・パフォーマンス関数(net.performFcn)は最小化される。newlinで作成される、デフォルトの、ネットワークのパフォーマンス関数は、平均二乗誤差(mse)であり、ネットワークの出力w=g(p・u+b)=id(p・u+b)=p・u+bと目標出力aとの間の平均2乗誤差は、次式で表わされる。
【数83】
【0134】
uiは、次式、
【数84】
で表わされる列ベクトルと定義する。
aは、次式、
【数85】
で表わされるベクトルと定義する。
【数86】
であるので、
【数87】
である。ここで、sum_perf(p)は、(1.17)の定義に従う。
【0135】
上述のとおり、学習の際、ネットワークの重みおよびバイアスは、反復的に調整されて、mseが最小化される。もし、バイアス値がゼロに初期化され、学習の間ずっとゼロに非常に近い値に保たれるのであれば、この最小化問題は、上述の第1のステップにおいて論じた問題(1.18)ととても類似した最小化問題である。
【0136】
バイアス値の問題の他にも、解決すべき問題がある。それは、どのようにして重みを正もしくはゼロに制限するか、ならびに、どのようにして重みの初期推定を選定するか、である。これらについては、以下の手法を用いている。
1. バイアス値:バイアス値は、初期化でゼロとし、50回もしくは100回のイタレーションでゼロにリセットする。
2. 重みの初期評価:先のセクションで説明したオプティマイゼーション・アルゴリズム(optimization algorithm)を、均一に分布した8つの速度veight=(veight1,...,veight8)にのみ適用し、(1.19)を用いて解析の第1のステップの為に、P(veight1),...,P(veight8)の8つの近似を求める。これら、速度領域における8つの値を3次の平滑化スプライン(Matlab(登録商標)の関数csaps)でフィッティングし、均一に分布したv1,...,vnにおけるこのスプラインを評価し、そして、最後に各値をvi+1−viで積算することで、解析の第2のステップの為に、重みに関しn個の初期評価を求める。ここで、nは、第1のステップで選択した値よりも大きな任意の値(例えば、図16−18の場合におけるn=32)でよい。一般的には、解析の第1のステップにおいて考慮する速度の初期の数は、4ないし16であり、好ましくは、6ないし10である。その一方で、第2のステップに対しては、考慮する速度の数は、8ないし64であり、このましくは、16ないし48である。
3. 重みにかかる非負の制約:50回もしくは100回のイタレーション毎に、負の重みは全てゼロに置換する。
【0137】
これらの規則および学習のMatlab(登録商標)の関数traingdxを用いることで非常に良好な結果を得ている。traingdxは、バッチ・グラジエント・デセント・モーメンタム(batch gradient descent momentum)およびアダプティブ・ラーニング・レート(adaptive learning rate)に基づいて重みおよびバイアスの値を更新する。
【0138】
・ グラジエント・デセント(gradient descent):グラジエント・デセント・アルゴリズムは、ネットワークの重みおよびバイアスを、パフォーマンス関数mseが最も急速に減少する方向に、更新する。つまり、その方向は、グラジエントの反対の方向である。このアルゴリズムのイタレーションは、次式、
【数88】
と書くことができる。ここで、WIは、現在の重みもしくは現在のバイアスのベクトルであり、gIは、現在のグラジエントであり、αIは、ラーニング・レート(学習率)である。
【0139】
・ バッチ・モード(batch mode):バッチ・モードにおいては、ネットワークの重みおよびバイアスは、ネットワークに全ての学習セットが適用された後でのみ、更新される。
【0140】
・ グラジエント・デセント・ウィズ・モーメンタム(gradient descent with momentum):モーメンタムは、グラジエント・デセント・アルゴリズムに追加することのできる手法の1つであって、ネットワークを、局所的グラジエントのみならず、誤差表面の最新の傾向に応答させることを可能にする。ローパス・フィルタのように機能し、モーメンタムによって、ネットワークは、誤差表面の小さな形態を無視することが可能となる。
【0141】
・ アダプティブ・ラーニング・レート(adaptive learning rate):学習率(ラーニング・レート)を、学習過程において変更可能とすることで、グラジエント・デセント・アルゴリズムの性能を向上させることができる。
【0142】
さらに、ノイズによる負の影響を低減するために、メジアン・フィルタ(median filter)(Matlab(登録商標)の関数medfilt1)を、この新しいアルゴリズムを適用する前に、ノイズを含んだベクトルE’に適用する。
【0143】
その結果を、以下に示す。
【0144】
結果を示す前に、負の重みの全ておよび現在のバイアスを、50回もしくは100回のイタレーション毎にゼロに置換する利点を示し、停止の基準の理論的説明を行う。
【0145】
学習のためのイタレーションの間、パフォーマンス関数mseの値が減少しているのに、アルゴリズムを停止させて負の重みの全ておよび現在のバイアスをゼロに置換すると、学習過程で得た関数の値が修正され、その結果、mseが増加する。そのため、イタレーションは、大きな値のパフォーマンス関数で再開する。
【0146】
停止までのイタレーションの回数Jが小さすぎると、mseが増加するまでに十分に減少せず、アルゴリズムに悪影響が及ぶ。
【0147】
経験的に得られていることだが、図16ないし18に示した特定の例においては、最適な結果を得るには、Jは、50以上であることが好ましい。一般的には、J値は、少なくとも10であることが望まれ、さらには、少なくとも25であることがなおさらに望まれ、なおさらには、少なくとも50以上で、例えば、200までの値であって、例えば100であることが望まれる。
【0148】
適用している停止基準について言えば、mseの相対的変化量が、指定した許容値(トレランス)tolを下回った場合に、停止する。mseの相対変化量は各イタレーションで測定するものではなく、負の重みおよび現在のバイアスがゼロに置換された場合は常に行われることに注意されたい。そのため、総イタレーション数は常にJの倍数である。
【0149】
vを用いて第1および第2のステップについて説明したが、vの代わりにτを用いて記述することも可能である。vの代わりにベクトルτを用いてサンプルE’を構成し、それをアルゴリズムを用いて解析する点のみ異なる。
【0150】
図16、17、および、18は、それぞれ、n=32、かつ、J=25、50、および、100で、同様のノイズを含んだE’(10%ホワイト・ノイズ)から対数正規P(τ)(m=−0.2191、s=0.45)を再構成した例を示す図である。いずれの場合であっても、アルゴリズムは、mseの相対変化量が許容値tol=0.01を下回ったため、停止した。しかし、J=25の場合のmseの最終的な絶対値と、J=50、100の場合のmseの最終的な絶対値との間には顕著な差違が見受けられる。表1は、mseの初期値および最終値を示す。本表より、J=25としたある例は、P(τ)を再構築するのに十分な程にmseを減少させることができなかったことは明らかである。
表1.mseの初期値および最終値
| 初期mse | 最終mse
――――――+―――――――――+――――――――
J=25 | 111.434 | 12.5768
J=50 | 111.434 | 0.5925
J=100 | 111.434 | 0.4729
【0151】
式(1.23)を用いて合成データE’を構築した場合、オフセット係数Oおよび振幅係数Aには、それぞれ、所与の値を用いる。この場合、これら既知の値を、アルゴリズムの適用に際して使用することができる。あるいは、実データを取り扱う場合、O=0と仮定してもよいが、振幅の値は未知である。Aに関する第1の近似は、E’に関する漸近値を仮定して、求め、この値を解析に下折る。しかしながら、この方法は、本問題を取り扱ううえで完全に十分な方法とは言えない場合もある。そのため、実際例において本手法の効率を向上させるために、以下のような修正を加えることができる。
【数89】
で定義される
【数90】
を、perfτ(t)の修正式とする。
この修正により、補充関数は、次式、
【数91】
のように表わすことができる。
【0152】
perfτ(t)の代わりに、この新しい
【数92】
にアルゴリズムを適用することができる。今後、この新しいアルゴリズム変形例を、「ファイナル・アルゴリズム」("final algorithm")と称することにする。旧アルゴリズムとの差違は、P(τi)の代わりに、A・P(τi)に関し
【数93】
の近似を求める点のみである。
【0153】
実際の振幅が既知である合成による例の場合、
【数94】
を、実際のA・P(τi)と比較することができる。また、確率密度関数が式(1.14)を満足するので、
【数95】
に従う。
よって、Aの近似は、次式、
【数96】
として得られる。
【0154】
図19、20は、ファイナル・アルゴリズムを用いて、それぞれ、J=50、100、tol=0.01として、図16、17、18と同じE’からP(τ)を再構築した例を示す図である。実際の振幅の値は、A=100である。
【0155】
先に説明したことだが、ここでの目的は、P(v)もしくは、等価的に、P(τ)の良好な近似を、その形式について何ら仮定を置かずに、求めることである。上記のファイナル・アルゴリズムによって求めた、幾つかの確率密度分布の再構築例を、以下に示す。これらは、全て10%ホワイト・ノイズを含んでいる。
【0156】
図21は、平均μ=12.5、分散σ2=11のガウシアンP(v)、即ち、平均A・P(v)、P(v)はガウシアン、J=50、tol=0.01、の、再構築を示す図である。
【0157】
図22は、A・P(v)の再構築を示す図である。P(v)は、ガウシアン、J=100、tol=0.01である。
【0158】
図23は、台形状P(v)の再構築を示す図である。つまり、A・P(v)の再構築であり、P(v)は、台形、J=50、tol=0.01である。
【0159】
図24は、A・P(v)の再構築を示す図である。P(v)は、台形、J=100、tol=0.01である。
【0160】
図25は、次式、
【数97】
で定義されるレイリー(Rayleigh)のP(v)の再構築を示す図である。ここで、b=6である。つまり、A・P(v)の再構築であり、P(v)は、レイリー、J=50、tol=0.01である。
【0161】
図26は、A・P(v)の再構築を示す図である。P(v)は、レイリー、J=100、tol=0.01である。
【0162】
図27は、次式、
【数98】
で定義される複峰性のP(v)の再構築を示す図である。ここで、
【数99】
である。
【0163】
この図27は、A・P(v)の再構築を示す図であり、P(v)は、複峰性、J=50、tol=0.01である。
【0164】
図28は、A・P(v)の再構築を示す図である。P(v)は、複峰性、J=100、tol=0.01である。
【0165】
図27における再構築は、図28に示すものほど良好ではない。実際観測したことだが、確率密度分布の場合は、対数正規分布やガウス分布よりもさらに複雑であり、J=50における本アルゴリズムの性能は、停止基準のためにより小さな許容値、例えば、tol=0.001とすることで、改善可能である。
【0166】
図29は、A・P(v)の再構築を示す図である。P(v)は、複峰性、N=50、tol=0.001である。
【0167】
図30は、次式、
【数100】
で定義される複峰性のP(τ)の再構築を示す図である。ここで、
【数101】
である。
【0168】
また、図30は、A・P(τ)の再構築を示す図である。P(τ)は、複峰性、J=50、tol=0.01である。
【0169】
図31は、A・P(τ)の再構築を示す図である。P(τ)は、複峰性、J=100、tol=0.01である。
【0170】
図30に示す例においては、先の例と同様に、J=50での本アルゴリズムは、複峰性分布を精確に再構築していないことがわかる。本アルゴリズムの性能は、A・P(τ)の再構築であってP(τ)が複峰性でありJ=50、tol=0.001である図32に示すような、停止基準に対するより小さな許容値を用いることで改善される。
【0171】
この場合、小さな許容値を用いることは、J=50での本アルゴリズムを改善させるうえで非常に有用である。しかし、一般的には、組織は非常に繊細であって、tol=0.001を用いれば、単純な分布の場合には精度が損なわれるおそれがある。この場合、tol=0.01で完璧な再構築が行われる。例えば、図25は、J=50、tol=0.01を用いて得られたレイリー分布の非常に良好な再構築を示す。図33は、J=50、tol=0.001を用いて得た、同一のE’からの同一のレイリー分布の再構築を示す。
【0172】
J=50での本アルゴリズムの例とは異なり、J=100を用いれば、許容値tol=0.001は、あらゆる種類の分布に対して小さすぎる。実際、複峰性分布に対する再構築の精度の劣化も観測されている。例えば、図30ないし32に示す複峰性に対し、J=100およびtol=0.001を用いた再構築を図34に示す。この図は、A・P(τ)の再構築であり、P(τ)は、複峰性であり、J=100、tol=0.001である。
【0173】
このように、あらゆる種類の分布に対し、その形式に関する情報を一切仮定せずにP(v)または、等価的には、P(τ)の良好な近似を求めるという目的は、達成された。したがって、関心領域における異常性の有無について、健常な組織を特徴付けている対数正規分布と、再構築した例とを比較することで、判断することが可能である。
【0174】
上述のファイナル・アルゴリズムのおかげで、10%のホワイト・ノイズを含む合成データの場合では、良好な結果を得た。
【0175】
この新しい方法により、特に、単純に、求めた再構築例と健常な組織を特徴付けている速度分布とを比較することで、生理学的な異常性を検出することができる。この新しい方法により、補充信号を微分する必要性がない。この新しい方法は、特に、かなりの大きさのノイズを含んだデータであっても良好な結果を得ることができる。
【0176】
<修正例>
本方法およびシステムでは、上述の実施形態に関し多くの修正例がある。これらの修正例は、上述した以外の、数多くの潅流に関する値もしくは属性を決定するのに用いることができる。
【0177】
さらに、上述の、曲線フィッティングとニューラル・ネットワークの学習を行う、複数のステップからなる解析は、S形状以外の、破壊フレームのシークエンスの後のUCAの注入下で求めた潅流関数を使用してもよい。その一例としては、調査対象の領域に到達した、UCA大量瞬時投与に関する場合である。複数の流れ遷移時間が存在しており、エコー・パワー・ボーラス関数E(t)は、エコー・パワー・関数Ei(t)の総和であると考えることができ、それぞれは、流れ遷移時間τiから決定される。この、基本大量瞬時投与関数Ei(t)は、次式のような形式を備えることができる。
【数102】
【0178】
図35に示す例においては、対数正規分布を有する流れ遷移時間C(τi)を考慮している。ここで、パラメータmおよびsは、それぞれ、0.313および0.4に等しい。この先、それぞれC1_part(τi)ないしC4_part(τi)と称する、遷移時間の4つの下位部分分布(partial sub-distributions)を示す。図36に示すように、この下位部分分布より決定される4つのエコー・パワー関数E1_part(t)ないしE4_part(t)の総和より得る、エコー・パワー関数E(t)を考察するため、本解析法を適用し、対数正規遷移時間分布C(τ)を評価する。
【0179】
本発明により、エコー・パワー関数を解析することで、図37に示すような元(オリジナル)の対数正規分布を評価することができる。
【0180】
<超音波画像化システム>
図38は、本発明にかかる方法で使用可能な、一般的な医療用超音波画像化システムの主要要素を示すブロック図である。中央処理装置1および中央タイミング回路2の制御下、送信ビーム形成器およびパルス形成器3を用い、適当なTx/Rx(送信/受信)マルチプレクサ4を介し、励起信号を、複数の素子を有する超音波プローブ5に与える。伝播媒体内における超音波の反射が生じ、プリ・アンプリファイアおよび予備的タイム−ゲイン補正部6を通してエコー信号を処理する。通例、これら受信信号は、A/D変換器により、アナログ電圧からデジタル値へ変換され、受信ビーム形成器7を通して集中的受信信号(focused receive signals)に統合される。デジタル・フィルタ8(例えば、バンド・パス・フィルタ)を通して処理され、また、その他の信号調整器9(例えば、ポスト・ビーム形成用TGC)を通して処理され、デジタル高周波(無線周波)(rf)信号10は、復調器11で処理され、エコーエンベロープの振幅に比例した信号が生成され、さらにプローブ形状およびビームのスキャン・シークエンスを勘案した非線形的な処理を、スキャン・コンバータ13に書き込む前に行う。スキャン変換信号は、任意で再び(後処理器14で)圧縮し、映像の標準的な信号に変換される。この映像信号は、アナログ形式(この場合、記憶部16は、映像記録設備である。)または、例えばコンピュータ・ファイルのようなデジタル形式(この場合、記憶部16は、ハード・ディスクである。)のいずれかで、映像表示部15に表示し、かつ/または、記憶部16に記憶することができる。このようにして得た画像は、次に、下文に示すようにして本発明により処理される。
【0181】
本発明による方法の実施に際し、このような超音波画像化システムを用いる場合、本発明による再潅流の動力学の分析に用いる信号は、振幅高感度モード(例えば、ハーモニックBモード、パルス・インバージョン、もしくは、パワー・モジュレーション・マルチパルス・モード、または、その他のコーデッド・エキサイテーションもしくはデモジュレーションのシングルパルスもしくはマルチパルス・モードといった)において例えば、微小胞の非線形音響応答性を利用した、造影剤に固有の検出スキームで求めるのが好ましい。あるいは、再潅流の動力学の解析に用いる信号は、(例えば、ハーモニック・パワー・ドップラー、デコリレーション・イメージング、もしくはその他の、微小胞の位置もしくは音響応答性の変化により連続した励起パルスの反応で生じる応答の変化を利用したモードといった)ドップラー・モードでの造影剤に固有の検出スキームで求めてもよい。
【0182】
<流速評価のためのシステム/方法>
図39は、本発明による、パラメータによる流れ画像化の一例における流れ評価方法を実施するためのシステムの主要な機能的要素を示すブロック図である。破壊後のUCAの再潅流が含まれたBモード画像のシークエンスが記録されたコンピュータ・ファイル21(例えば、図38のデジタル・ファイル・記憶部16)から出発し、画像値には、使用した超音波設備に特有の対数圧縮もしくはその他の非線形的ゲイン・データ23に基づいて、適当な線形化22処理が施され、局所的UCA濃度に比例したデータが生成される。時系列データは、本発明による最適フィット方法24により調整され、上述した、予想される潅流則を記述したパラメータ方程式に対し、適合される。これらパラメータの物理的解釈25には、例えばTx/Rxビーム感度データ、および、気泡破壊区域厚さDといった、超音波設備からの入力データ26が必要である。最適フィット・パラメータによって、平均流速データ、平均遷移時間分布評価、もしくは、その他の流れの特性の計算が可能となり、これらは、スキャン・コンバージョン・メモリ27において周知のグレースケールもしくは疑カラー・コーディングでマッピングされ、さらに、任意的に、Bモードもしくは二次元ドップラー・データと重ね合わされ、映像表示部28に表示され、または、デジタルもしくはアナログ形式で記憶される(図示せず)。
【0183】
本発明のよるシステムの機能的要素は、コンピュータにロードすることで、自動的もしくは手動的制御下で再潅流における局所的な物質濃度に比例した信号と、対応するS形状特性を有する時間の関数とを関係付けするように動作するプログラムとして記憶させることが可能である。使用する数学的関数は、例えば、Matlabのカーブ・フィッティング・ツールボックス(Curve Fitting Toolbox)を用いて実現することが可能である。このプログラムは、さらに、記録したエコー信号の振幅を処理し、信号を微小胞の局所的濃度と比例するようにする手段を備えることが好ましく、この手段は、システムのコンピュータにロードされ、自動的もしくは手動的制御下で、処理された信号をS形状パラメータ関数に適合もしくは関連付けする前に、先述の振幅の処理を実行する。また、本プログラムは、自動的もしくは手動的制御下で、S形状特性を有する関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流の値もしくは属性の少なくとも1つとを対応付けするための手段を有することが好ましい。このフィッティングは、例えば、先述の信頼領域法を用いて計算することができる。これらの主要な機能性は両方とも、自動的もしくは半自動的に、使用者による制御を可能にする適切なユーザ・インターフェースを備えて、実現することが可能である。
【0184】
選択した関心領域内における組織の潅流の評価は、研究を実行中の使用者、または、本システムのプログラムに組み込まれた自動境界描写もしくはその他の解剖学的な器官の形態に基づき、自動化手段が決定可能である。二次元的映像要素、もしくは、ピクセルについて個別的に潅流値が評価されれば、これらの値を、パラメータ画像として観察モニタに表示可能である。この場合、ピクセルのグレースケール輝度もしくは演色(カラー・レンダリング)は、局所的に評価されたパラメータ個々の値もしくはそれらの組み合わせに基づいてコード化される。さらに、本システムのプログラムは、二次元的映像要素群(グループ)、もしくは、複数ピクセルについて潅流値を評価可能である。この群(グループ)は、群に含まれるピクセルに対して得られたパラメータが実質的に1つの値を有するように、局所的な画像解像度に基づいて決定される。通例、潅流値をピクセルの群(グループ)内で評価すれば、これらの群(グループ)は、超音波機器の局所的スペックル・パターンから、実質的には(自動的に)決定可能である。ピクセルの群(グループ)の大きさは、局所的な超音波検査画像の二次元空間フーリエ解析から求めることができ、その大きさは、局所的に存在する最大の有意な空間周波数に逆比例する。これらは全て、システムのプログラムにより自動的に、または、使用者の制御下で計算される。本プログラムは、最後の破壊用超音波パルスと、S形状関数が、破壊用超音波パルスを適用する直前の濃度値の2分の1の物質(造影剤)濃度に等しい振幅に達した瞬間との間の時間経過から、流れパラメータを評価可能である。
【0185】
また、本システムのプログラムは、平均局所的血流速度を計算することもできる。これは、微小胞が破壊されたスライスの厚さの半分(one-half the thickness of the slice)を、最大濃度の半分に到達する時間で割った比で表わされる。このために、本プログラムは、画像化面に垂直な方向における、微小胞が破壊されるスライスの厚さの近似値を、送信ビームの高さ方向の幅から求めることができる。
【0186】
本システムのプログラムは、破壊パルス後、長時間を経た時間値に対し、S形状関数の漸近値として、定常状態物質(造影剤)濃度レベルを計算することができる。また、この濃度レベルは、破壊パルスの直前での値から採ることもできる。
【0187】
本システムのプログラムは、S形状関数を、上記にて詳述したように、累積正規確率分布関数、シグモイド関数、累積正規確率分布関数の多項式近似、多項形式による限定的展開を含んだパラメータ式、または、累積対数正規確率分布関数によるパラメータ式、として計算可能である。ある実施形態においては、本システムのプログラムは、S形状関数を、累積正規確率分布関数の総和(サム)もしくは積分(インテグラル)によるパラメータ式として計算する。この累積正規確率分布関数は、流速もしくは遷移時間の対数正規確率分布で重み付けされ、またその最適フィット・パラメータ値は、平均(ミーン)、分散(バリアンス)、および、歪度(スキューネス)と同様、器官における潅流の物理的な量を表わしている。
【0188】
流速値を、再潅流関数の、平滑化した、もしくは、フィルタをかけた変形関数を用いて評価し、定常状態のエコー・パワー振幅の半値に到達するための時間を評価可能である。
【0189】
局所的濃度に比例した信号を、パラメータ・フィッティング関数を用いて適合化させる前にローパス・フィルタもしくはその他の平滑化関数で処理することは有利である。線形化を行う代わりに、局所的濃度に比例した信号を、超音波検査機器において適用されたものと同一の性質を有する非線形関数で修正したパラメータ・フィッティング関数に適合化させることも可能である。
【0190】
先に図9aないしdを参照して詳述したように、エコー・パワー・データを、ウェーブレットで分解する方法により解析し、異なる流れ遷移時間もしくは速度における寄与の分布を評価可能である。このために、局所的濃度に比例した信号は、ウェーブレットで分解する方法で解析する前に、先ず、ローパス・フィルタもしくは平滑化をかけることが好ましい。これにより、ウェーブレットで分解する方法で解析する前に2回、微分可能となる。ウェーブレットの手法においては、分解に用いるマザー・ウェーブレットは、例えば、単一の流れ値に対する再潅流関数を記述するのに用いた累積正規分布関数の2次時間導関数である。
【0191】
さらに、もしくは、あるいは、エコー・パワー・データを、1つのステップもしくは複数のステップからなる処理過程を用いて解析し、異なる流れ遷移時間もしくは速度における寄与の分布を評価する。第1のステップにおいては、流れ遷移時間もしくは速度の第1のセットを選択し、複数のS形状関数の線形結合と、エコー・パワー・データとの最適フィットを行って第1の評価を求める。そして、第1の評価を第2のセットを決定する基準として用い、流れ遷移時間もしくは速度の第2のセットに対して第2の評価が行われる。そして次に、第2の評価を用いて第3の評価を行うための、初期値のセットを決定する。
【0192】
例えば、第2の評価は、3次のスプライン補外を用いて行うことができる。また、第3の評価は、ニューラル・ネットワーク解析を用いて行うのが有利である。この場合、ニューラル・ネットワークのバイアス値および負の重みは、定期的に(例えば、適合化における50ないし100回のイタレーション毎に)ゼロにリセットすることが好ましい。第1の評価は、比較的少数のS形状関数、通常は高々16、好ましくは高々8つのS形状関数を用いて行うことができる。第2の評価は、さらに多くの数の流れ遷移時間もしくは速度、例えば、少なくとも8つ、好ましくは16の流れ遷移時間もしくは速度のセットを用いて行うことができる。
【0193】
また、局所的濃度に比例した信号を、高周波(無線周波数)エコー信号(つまり、図38における10)から、例えば復調エコー信号をスクエアリング(squaring)することで導出可能である。あるいは、対数圧縮した後の映像エコー信号へ、対数圧縮の逆の効果を与える逆対数圧縮を施して、それより局所的濃度に比例した信号を導出し、これらの信号をスクエアリング(squaring)する。ある実施形態においては、局所的濃度に比例した信号は、振幅高感度モード(例えば、ハーモニックBモード、パルス・インバージョン、もしくは、パワー・モジュレーション・マルチパルス・モード、または、その他のコーデッド・エキサイテーションもしくはデモジュレーションのシングルパルス、もしくは、マルチパルス・モードといった)における微小胞の非線形音響応答性を利用した、造影剤に固有の検出スキームにより求める。
【0194】
本システムのプログラムは、1つもしくは複数の、画像化システムのコンピュータにロード可能な、1つもしくは複数のモジュールで提供可能である。これにより、使用者の制御下に於いて、自動的もしくは半自動的な本発明の方法の実施が可能である。本願に記載の処理ステップを実行するための数学的関数を全て、自動化することができる。
【0195】
本プログラムは、一般に、CD−ROM、DVD、または、その他のコンピュータ読取り可能な媒体を介して提供される。あるいは、本プログラムを、ハード・ディスクにプリ・ロード(事前搭載)、ネットワークを通じてコンピュータに送信、もしくは、放送により提供してもよい。さらに一般的には、コンピュータのワーキング・メモリへ直接的にロードするあらゆる形態により提供される。しかしながら、本発明による方法は、ハードウェア的構造体(例えば、半導体材料のチップへの集積)、もしくは、ソフトウェアおよびハードウェアの協働により実行することができる。
【0196】
さらに、上記の本プログラムは、既存の超音波画像化システムにおいて使用することを目的としたスタンドアロンの製品として市場に供することにも適する。例えば、本プログラムを、システムに組み込まれたコンピュータ、または、別個のスキャナより供されるエコー信号のシークエンスを(例えば、リムーバブル・ディスク、通信線、無線接続を通じて)受信する外部コンピュータ上で使用することができる。
【実施例1】
【0197】
<例>
本願開示の発明の、インビボ適用可能性を示すため、膨張性動脈内バルーンを用いてミニブタの腎臓に人工的閉塞(狭窄)を作成した。造影剤には、SonoVue(登録商標)(ブラッコ・イメージング(Bracco Imaging S.p.A.))を用い、静脈内へ、1mL毎分の一定の注入速度で投与した。超音波画像化設備には、パルス・インバージョン・コントラスト−スペシフィックBモード画像化でC5−2コンベックス・プローブを用いたSTL/Philips(ワシントン州、ボセル(Bothell, WA))のHDI−5000を用いた。UCA破壊/補充画像のシークエンスが、記録され、コンピュータに送信され、再潅流分析に供された。グレースケール・リニアライゼーションが可能なビデオ・デンシトメトリ・プログラムを用い、腎皮質に2つの関心領域を設定した。第1の領域、AOI−1は、正常に潅流している腎皮質内に設定し、それに対し、もう一つの領域、AOI−2は、皮質の低潅流領域に設定した。気泡は下位フレームを適用してからの10秒間におけるAOI−1およびAOI−2に対する、線形化したビデオ・デンシトメトリのデータ・ポイントをそれぞれ、図40aおよび図40bに示す。それぞれのグラフにおいて、最適フィットのlogperfエネルギ関数、E(t)を実線で示す。これら2つのAOIに対する、最も適当な最適フィット・パラメータはAOI−1およびAOI−2についてそれぞれ、A=59.5、および、A=0.62、τ=1.25sおよびτ=3.1sであった。これら2つの領域では、D値は6mmおよび8mmであって、横方向流速vyはそれぞれ、2.4mm/sおよび0.97mm/sである。相対流量は、Aとvyの積で求まり、よって、AOI−1およびAOI−2ではそれぞれ、142.8および0.6なる値である。これより、これら2つの皮質領間では、非常に大きな流れの違いがあることが示唆されている。
【0198】
当然のことながら、部分的もしくは特定の要請を満たすために当業者が、本願記載の手法に様々な修正および変更を加えようとも、それらは、クレームの規定する本発明の保護範囲に含まれる。
【図面の簡単な説明】
【0199】
【図1a】超音波トランスデューサからの音響ビームの投射を示す図である。
【図1b】高さ方向に関する超音波画像化機器のビーム感度分布のグラフの典型例である。
【図2】破壊の生じた区域における再潅流の、造影剤の信号パワーのS形状関数を示すグラフである。本発明による方法では、このようなS形状関数を用いる。
【図3a】本発明のある実施形態よる、インビトロ設定における実験記録を累積対数正規分布関数でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図3b】本発明のある実施形態よる、インビトロ設定における実験記録を累積対数正規分布関数でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図4a】従来技術による単一指数関数フィットと、それに対応する本発明の方法による評価を用いた流速評価のグラフである。
【図4b】従来技術による単一指数関数フィットと、それに対応する本発明の方法による評価を用いた流速評価のグラフである。
【図5a】2つの流れ遷移時間の対数正規確率分布関数のグラフである。
【図5b】2つの流れ遷移時間の対数正規確率分布関数のグラフである。
【図6a】図5aおよび図5bに示すような流れの分布で生じるS形状エコー・パワー再潅流関数のグラフである。本発明の別の実施形態において有用である。
【図6b】図5aおよび図5bに示すような流れの分布で生じるS形状エコー・パワー再潅流関数のグラフである。本発明の別の実施形態において有用である。
【図7a】本発明のさらに別の実施形態による、インビトロ設定における実験記録を、遷移時間のS形状対数正規分布による再潅流関数の総和(サム)(sum)でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図7b】本発明のさらに別の実施形態による、インビトロ設定における実験記録を、遷移時間のS形状対数正規分布による再潅流関数の総和(サム)(sum)でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図8】図7に示すデータに対する最適フィットとして求まる対数正規遷移時間分布のグラフである。
【図9a】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図9b】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図9c】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図9d】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図10】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図11】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図12】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図13】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図14】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図15】ニューラル・ネットワークを示す図である。
【図16】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図17】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図18】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図19】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図20】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図21】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図22】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図23】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図24】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図25】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図26】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図27】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図28】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図29】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図30】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図31】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図32】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図33】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図34】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図35】上述した1つのステップまたは複数のステップからなる処理の別の用途を示す図である。
【図36】上述した1つのステップまたは複数のステップからなる処理の別の用途を示す図である。
【図37】上述した1つのステップまたは複数のステップからなる処理の別の用途を示す図である。
【図38】一般的な医療用超音波画像化システムの主要要素を示すブロック図である。
【図39】本発明による、パラメータによる流れの画像化の一例における流れ評価方法/システムの主要な機能的要素を示す図である。
【図40a】2つの関心領域に対する補充関数の実験結果を示す。腎皮質の正常な潅流の領域である。
【図40b】2つの関心領域に対する補充関数の実験結果を示す。腎皮質の低潅流の領域である。
【符号の説明】
【0200】
1 : 中央処理装置
2 : システム・タイミング
3 : Txビーム形成器およびパルス形成器
4 : Tx/Rxマルチプレクサ
5 : 超音波プローブ
6 : RxTGCおよびプリアンプ
7 : RxA/Dコンバータおよびビーム形成器
8 : デジタル・フィルタ
9 : その他の信号調整器
10 : デジタルrfエコー信号
11 : デジタル復調器
12 : 対数圧縮前処理部
13 : スキャン・コンバータ
14 : オプションの後処理用圧縮器
15 : 映像表示部
16 : 画像記憶部
【技術分野】
【0001】
本発明は、ガス充填微小胞の破壊/補充モニタリングを含む処理過程における血流評価手法に関する。ここでは、流れのパラメータは、補充の動力学を分析することで導出される。より具体的には、本発明は、生きている被験対象の組織における潅流の非侵襲的評価法に関する。また、本発明は、本方法を実施するコンピュータ・プログラム、および、当該プログラムを具現化した製品に関する。なおさらに、本発明は、潅流の非侵襲的定量のシステム、および、当該システムで使用する装置に関する。
【背景技術】
【0002】
キャリア液において、効率的な超音波反射体として気泡浮遊液を用いることは、当該分野において周知である。超音波画像化を向上させる手段としてのこれら浮遊液の研究開発は、気泡となって溶解ガスが溶液から現われる程の、急速な静脈注射を観察した初期の観測に端を発する。血液に対し、気泡は著しく異なる音響インピーダンスを有するが故、血管内の気泡が、優れた超音波の反射体となることが見出されている。キャリア液に含めた気泡浮遊液を生きた生物体内へ注入することにより超音波検査の画像化能は目覚ましく強化され、よって内部器官の可視化能を向上させる。器官および深部にある組織の画像化が医学的診断を固める上で重要な場合もあって、これまでにも調製および投与が簡便で、最小限の不活性種を含み、かつ、長期保存および配給容易な、気泡を高濃度で含む安定な浮遊液(懸濁液)の開発に多大な努力が払われてきた。
【0003】
だが、水溶性媒体における自由な気泡の単純な分散についての実用上の関心は低い。なぜなら、これらの気泡は一般に、超音波造影剤として有用なほどに安定ではないからである。
【0004】
したがって、関心は、超音波診断や、その他の超音波による調査用に、気泡を安定化させる手法に注がれてきた。それらは例えば、乳化剤、油、増粘剤、もしくは糖を用い、また、いろいろなシステムにおいて、気体もしくはその前駆物質を同調させ(添加し)たり、カプセル化したりしている。このような安定化された気泡は、本分野では、一般に「微小胞」と称しており、これは大別すれば2つの主要カテゴリに分類される。安定化気泡即ち微小胞の第1のカテゴリは、本分野では、一般に「微小気泡」と称しており、これには、界面活性剤(つまりは、両親媒性物質)を有する非常に薄い包膜をその気液界面に備える気泡を含んだ水性浮遊液(懸濁液)が含まれる。微小胞の第2のカテゴリは、本分野では、一般に「マイクロバルーン」もしくは「マイクロカプセル」と称しており、これには、天然由来もしくは合成によるポリマーで形成した固体物質包膜で周囲を取り囲まれた気泡を含む浮遊液(懸濁液)が含まれる。これらとは別種の超音波造影剤としては、ポリマーまたはその他の固体からなる多孔性微粒子の浮遊液(懸濁液)がある。これは、微粒子の細孔(ポア)に気泡を捕捉し、気泡を輸送する。
【0005】
本発明は、これに限定されないが、特に、潅流、破壊、および、超音波造影剤(UCA)の補充をモニタリングすることを包含する技術を活用するための、ガスの微小気泡を含んだ水性浮遊液(懸濁液)を含めた超音波造影剤(UCA)の使用と関連性を有する。ガス充填マイクロバルーンを本願の方法で用いることも好都合である。
【0006】
一般に、微小気泡は、本質的に、両親媒性物質の層によって安定化された、ガスが充填された微小胞と定義される。微小気泡の水性浮遊液(懸濁液)は、一般には、粉末状両親媒性物質、例えば凍結乾燥したリポソームまたは凍結乾燥もしくは吹き付け乾燥したリン脂質溶液、を、空気またはその他の気体と接触させ、そして水性キャリアと接触させ、それから撹拌して微小気泡浮遊液(懸濁液)を作成することで調製され、また調製された後は直ぐに投与する必要がある。
【0007】
特許文献1(EP0458745)、特許文献2(WO91/15244)、特許文献3(EP0554213)、特許文献4(WO94/09828)、特許文献5(WO95/16467)は、ガスを充填した微小胞、特に微小気泡およびマイクロバルーン、を含む水性浮遊液(懸濁液)、ならびに、その調製法の例を開示する。
【0008】
1998年、研究者は、超音波画像化機器の作る画像面から、破壊の後の、微小気泡をベースにした超音波造影剤(UCA)の補充の速度(比率)をモニタすることを提案した(非特許文献1)。微小気泡の破壊の可能性は、局所的に、本質としては、画像面に対し、薬剤の所謂「負の大量瞬時投与(ネガティブ−ボーラス)」を与える効果をもたらす。これが起こらなければ、器官内においては原則として測定期間中ずっと、一定の薬剤の潅流がある。連続的な(換言すれば、所謂「リアルタイムの」)または間欠的(断続的)な(換言すればトリガーによる)画像化において、画像面でのUCAの再潅流の測度(比率)を観察すれば、その器官の潅流、換言すれば局所的な流れのパラメータの評価が可能である。
【0009】
この手法は、広範多岐にわたって用いられ、様々な出版物で常に報告がなされている。それらは、補充の映像や時間の関数であるドップラー信号を、一区画分の容積内の指標の希釈に関する動力学を記述する数式(増加型の単一の指数関数の形式の数式)を用いて最適フィットしている。以下の出版物例を参照されたい。
【0010】
非特許文献2の図8は、単一の指数関数でフィットした、パルス間隔に対する映像強度(輝度)の関係を示している。
【0011】
非特許文献3の図2は、パルス間隔に対する映像強度(輝度)の、単一の指数関数的な関係性を示している。
【0012】
非特許文献4の論文は、生理学的に異なる流れの条件に対する別種の再潅流濃度対時間の曲線について議論している。
【0013】
非特許文献5の図2および図3は、単一の指数関数でフィットした、時間に対する音響強度をプロットする。ここでは、記録されたデータは、薬剤の濃度に比例している。
【0014】
非特許文献6は、造影剤の補充について分析し、さらに、ウェイら(Wei et al.)の導入した単一指数関数を用いた非線形曲線によるフィッティングを行っている。
【0015】
非特許文献7の図7は、「1相指数結合方程式」("1-phase exponential association equation")を用いて、時間に対する映像強度(輝度)の曲線をフィットしている。
【0016】
特許文献6(WO02/102251)は、微小気泡の破壊/補充について記載し、また、その図2bにおいて、時間に対する微小血管の映像強度(輝度)に関する単一指数関数が示されている。これによれば、微小血管の流れの強さは、単一指数関数の初期の傾きに対する正接として表される。また、図2cにおいて、パルス間隔に対する映像強度に関する単一指数関数が示されている(間欠モード)。
【0017】
本願の発明者は、先行する発見的手法で得られた結果は有望なものであると見ている。なぜなら、エコー信号を観測者に対して映像信号の形式で供する前は、あらゆるエコー画像化機器においてエコー信号は強度の非線形圧縮(対数圧縮とも称する。)を受けているからである。よって、単一指数関数(monoexponential function)で映像データをフィッティングすることにより、実際的な局所的な器官の潅流に関連した流れの評価を行うことが可能である。これについて、これまでのところ、満足のいく結果が得られている。
【0018】
しかし、本願の発明者は、周知の手法は、受信器のゲインや、対数圧縮、等といった、使用者が選択する機器設定に対し非常に敏感であると考えている。さらに、抽出されるパラメータは、機器の種類毎に固有のものがあり、異なる設備または設定を使用する研究者間での比較が困難である。また、現在の先端的手法により抽出される潅流のパラメータは、相対評価である。よって、流れのパラメータの絶対的定量評価に不適である。
【特許文献1】欧州特許出願公開第0458745号明細書
【特許文献2】国際公開第91/15244号パンフレット
【特許文献3】欧州特許出願公開第0554213号明細書
【特許文献4】国際公開第97/09829号パンフレット
【特許文献5】国際公開第95/16467号パンフレット
【特許文献6】国際公開第02/102251号パンフレット
【非特許文献1】ウェイ、K.、ジャヤウィーラ、A.R.、フィルーザン、S.、リンカ、A.、スカイバ、D.M.、およびカウル、S.(Wei, K., Jayaweera, A. R., Firoozan, S., Linka, A., Skyba, D. M., and Kaul, S.) 「クアンティフィケーション・オブ・マイオカーディアル・ブラッド・フロウ・ウイズ・ウルトラサウンド−インデュースド・デストラクション・オブ・マイクロバブルズ・アドミニスタード・アズ・ア・コンスタント・ベーナス・インフュージョン」("Quantification of Myocardial Blood Flow With Ultrasound-Induced Destruction of Microbubbles Administered as a Constant Venous Infusion")、 サーキュレーション(Circulation)、巻97、1998
【非特許文献2】K.ウェイ(K. Wei)、 ディテクション・アンド・クアンティフィケーション・オブ・コロナリー・ステノシス・セビリティ・ウイズ・マイオカーディアル・コントラスト・エコーカーディオグラフィ(Detection and Quantification of Coronary Stenosis Severity With Myocardial Contrast Echocardhiography)、 プログレス・イン・カーディオバスキュラー・ディジーゼズ(Progress in Cardiovascular Diseases)、44(1)、2001、81−100
【非特許文献3】ケビン・ウェイ、エリザベス・レ、ジャン−ピン・ビン、マシュー・コギンス、ジェレール・ソープ、サンジフ・カウル(Kevin Wei, Elizabeth Le, Jian-Ping Bin, Matthew Coggins, Jerrel Thorpe, Sanjiv Kaul)、 クアンティフィケーション・オブ・レナル・ブラッド・フロウ・ウイズ・コントラスト−エンハンスド・ウルトラサウンド(Quantification of Renal Blood Flow With Contrast-Enhanced Ultrasound)、 J.Am Coll Cardiol、37、2001、1135−40
【非特許文献4】カルチャクジャン、R.、バーンズ、P.N.、およびヘンケルマン、M.(Kharchakdjian, R., Burns, P. N., and Henkelman, M.)、 フラクタル・モデリング・オブ・マイクロバブル・デストラクション−リパーフュージョン・イン・アンリゾルブド・ベッセルズ(Fractal Modeling of Microbubble Destruction-Reperfusion in Unresolved Vessels)、 IEEE ウルトラソニックス・シンポジウム(IEEE Ultrasonics Symposium)、2001
【非特許文献5】リム、S.−J.、レオン−ポイ、H.、リンドナー、J.R.、カウンチャー、D.、エレガーラ、D.、マッソン、H.、デュリウ、M、カッセ、N.F.およびカウル、S.(Rim, S.-J., Leong-Poi, H., Lindner, J.R, Counture, D., Ellegala, D., Masson, H., Durieux, M, Kasse, N.F. and Kaul S.)、 クアンティフィケーション・オブ・セレブラル・パーフュージョン・ウイズ・リアル−タイム・コントラスト−エンハンスド・ウルトラサウンド(Quantification of Cerebral Perfusion with Real-Time Contrast-Enhanced Ultrasound)、 サーキュレーション(Circulation)、巻104、2001、2582−2587
【非特許文献6】シュロッサーら(Schlosser et al.)、 フィーシビリティ・オブ・ザ・フラッシュ−リプレニッシュメント・コンセプト・イン・レナル・ティシュー:ウィッチ・パラメーターズ・アフェクト・ジ・アセスメント・オブ・ザ・コントラスト・リプレニッシュメント?(Feasibility of the Flash-Replenishment Concept in Renal Tissue: Which Parameters Affect the Assessment of the Contrast Replenishment?)、 ウルトラサウンド・イン・Med.& Biol.(Ultrasound in Med. & Biol.)、巻27、2001、頁937−944
【非特許文献7】マーシー、TH、Li、P、ロクビッキオ E、バイシュ C、ダイリワラ I、アームストロング WF、バナン M.(Murthy TH, Li P, Locvicchio E, Baisch C, Dairywala I, Armstrong WF, Vannan M.)、 リアル−タイム・マイオカーディアル・ブラッド・フロウ・イメージング・イン・ノーマル・ヒューマン・ビーイングス・ウィズ・ザ・ユース・オブ・マイオカーディアル・コントラスト・エコーカーディオグラフィ(Real-Time Myocardial Blood Flow Imaging in Normal Human Beings with the use of Myocardial Contrast Echocardiography) J Am Soc Echocardiogr、14(7)、2001、698−705
【発明の開示】
【発明が解決しようとする課題】
【0019】
本願発明は、先述の指標希釈の理論(the indicator-dilution theory)より導出される数式(所謂、単一指数関数)が、画像面もしくは断層撮影のスライスにおける破壊の後のUCAの再潅流の動力学を正しく記述していない、という事実に端を発し成された。
【0020】
本発明は、新しい手法を提示することにより上述の問題を解決する。本手法は、原則的には使用者および機器に依存する流れのパラメータ評価について、純然たる物理学上の術語による物理学的意味を与える。
【課題を解決するための手段】
【0021】
本発明は、ある態様においては、生きた被験対象の組織における潅流の非侵襲的定量方法を提供する。本方法は、先ず、エコー信号のシークエンスを供給するステップを実行する。このエコー信号のシークエンスは、組織内における画像化のための造影剤の補充を示唆するものである。パラメータを備えた時間に関するS形状関数(パラメトリックS形状関数)を、エコー信号と関連付ける(つまり、合致または関係付けさせる)。そして、S形状関数の1つもしくは複数のパラメータの少なくとも1つの値と、局所的組織潅流値(例えば平均速度、平均流量、潅流量)の少なくとも1つ、もしくは、属性(例えば、血流パターン)との対応付けを行う。
【0022】
本願明細書および請求の範囲において定義される、S形状関数またはS形状特性を備えた関数は、実質的に一定な初期値を有する初期部と、実質的に一定な最終値を有する最終部と、初期部と最終部との間にあって初期値から最終値に向かってS形状関数が単調に変化する中央部とを含む数学的関数である。この関数は、その中央部において、二次導関数が少なくとも一度はゼロとなることが好ましい。また、このS形状関数は、その初期部および最終部において、一次導関数は原則としてゼロであることが好ましい。S形状関数の例としては、「誤差関数」、双曲正接、シグモイド関数、累積正規分布関数、累積対数正規分布関数、もしくはこれらの多項式近似がある。
【0023】
本発明のある実施形態においては、造影剤は、音響エネルギを反射する能力を備えた微小胞を含む。エコー信号のシークエンスを供給するステップは、超音波画像化装置の画像化面(画像面)に超音波パルスを与えるステップを含み、この与えられる超音波パルスは、画像化面に存在する微小胞の大部分を破壊するに十分な大きさである。そして、別の超音波パルスのシークエンスが画像化面に与えられる。この、別の超音波パルスは、微小胞の大部分が保存(維持)される程度の小さな音圧を有する。この、別の超音波パルスのシークエンスを与えるステップは、所定の時間間隔(predetermined subsequent instants)で繰り返される。そして、この別の超音波パルスにより画像化面から発せられたエコー信号を記録し、先述の時間間隔毎の画像化面における微小胞の補充をモニタする。
【0024】
別の向上点としては、エコー信号が、S形状関数を関連付けする前に、処理される点がある。特に、エコー信号は、微小胞の局所的濃度に比例して形成される。このようにして処理されたエコー信号は、画像化面内の位置における造影剤の濃度に比例するように形成される。超音波ビームの幾何形状およびUCAの破壊の程度に基づいて、本発明は、その一実施形態においては、画像化面での平均流速と、定常状態のUCA濃度の2分の1に到達するために要する時間とを関係付けする。これは、先述のS形状関数の最適フィットより求められる。S形状潅流関数を、UCAにより生成されるエコー信号にフィットさせることが好ましい。エコー信号の瞬間振幅は、これらエコー信号を生成したUCAの局所的濃度に比例する。この比例関係は、一般に、超音波分析から得た最終データを適切に線形化して求める。このデータは、通例、2種類存在する。第1種のデータは、「イメージ(画像)」と称され、アナログもしくはデジタルの映像信号、または、その他のグレースケールもしくはカラー化した振幅二次元マップ(2Dマップ)として表わされたエコー信号を含む。この信号は、生成されたエコー信号の、非線形ダイナミックレンジ圧縮(例えば、対数圧縮)が含まれる処理より得る。イメージ(画像)は、通例、所定の大きさを有するイメージ・エレメント(画像要素(ピクセル(画素)))を有する。第2種のデータは、「ロー(生の)」エコー信号と称され、超音波エコーの振幅に比例した振幅を有する信号を含み、この信号は、通例、超音波装置から直接的に得る高周波(rf)エコー信号である。
【0025】
本願で使用する用語「線形化」または「線形化信号」は、超音波エコー信号を生成した局所的UCAの濃度と正比例する振幅を有するように処理した超音波エコー信号を指す。これは、ランダムに間隔をおいて存在する散乱体の集団による音響エネルギ散乱の性質を反映している。音圧に比例したrf信号または復調rf信号を取り扱う場合、生のエコー信号の振幅を適切にスクエアリング(squaring)することで、線形化可能である。あるいは、対数圧縮したイメージ(画像)を取り扱う場合、各ピクセル(画素)の振幅値を適切に逆対数圧縮してスクエアリングすることで、線形化可能である。このようにして、処理された信号の振幅とUCA濃度との比例関係が求められる。
【0026】
あるいは、「非−線形化」エコー・データ(例えば、イメージ)、換言すれば、局所UCA濃度に比例しないデータに、S形状関数をフィットさせることもできる。この場合、非−線形化データにフィットさせるべく選択したS形状関数は、UCA濃度とエコーデータとの間に非線形性を生じせしめた過程と同様の過程(例えば、S形状関数の平方根や対数圧縮)により修正される。
【0027】
曲線フィッティングが実施されるエコー信号は、通例、超音波装置の画像化面に超音波パルスのシークエンスを与えることで得られる。そして、画像化面内の微小胞の補充のモニタリングは、画像化面に含まれる微小胞に由来する超音波エコー信号の振幅を(時間の関数として)記録することでなされる。
【0028】
組織内での画像造影剤の補充を示唆するエコー信号シークエンスの供給工程は、以下のステップを含んでよい。
−UCAを一定的に器官もしくは関心領域に供給する、または、この破壊−補充方法に必要な数秒間の間、一定的であって十分なUCAの潅流が可能な条件を満たすようにUCAを大量瞬時投与(ボーラス)として注入する。
−UCA破壊フレームの適用の直前の、関心領域のエコー信号を、微小胞の破壊が可能となる所定の閾より小さい音響エネルギで記録する。
−先述の所定の閾よりも大きくかつ画像化面に存在する微小胞のかなりの部分を破壊せしめるに足る音響エネルギを有する超音波パルスを用い、超音波画像化装置の画像化面にUCA破壊フレームを与える。
−UCA破壊フレームを与えた直後の、関心領域のエコー信号を、先述の微小胞破壊閾よりも小さい音響エネルギで記録する。
【0029】
以下のステップは、(例えば、上述の方法論により取得可能な、)組織内の画像造影剤の補充を示唆する、あらゆるエコー信号のシークエンスに対して実行可能である。以下のステップにより、組織の潅流パラメータを決定する。
−先述の信号を、局所的な基準についてS形状関数(例えば「誤差関数」のファミリー)に最適フィット評価する。この局所的基準は、使用者の選んだ関心領域(ROI)の内部であってよく、その局所におけるピクセル単位のレベルで最適フィットを行い潅流パラメータ・イメージ(画像)を作成してもよいし、もしくは、コヒーレントなビームを使用して信号を得た場合であれば、超音波画像のスペックルの性状から定めるピクセル群のレベルで最適フィットを行ってもよい。
−S形状の特性を備えた関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流値(例えば平均遷移時間、平均速度、平均流量、潅流量)の少なくとも1つ、もしくは、属性(例えば、血流パターン、流れの分布の分散(バリアンス)(variance)もしくは歪度(スキューネス)(skewness))との対応付けを行う。
【0030】
上記の最適フィット評価を実行する前に、エコー信号を処理(例えば線形化)し、局所的なUCA濃度に比例した、処理したエコー信号を求め、UCA濃度に比例したデータに対して最適フィットを実行することが好ましい。
【0031】
S形状の特性を備えた関数のパラメータの値と局所的組織潅流値との対応付けの例としては、破壊フレームで破壊された区域(もしくはスライス)の厚さの半分(half-thickness)を局所的パラメータ・フィットで求まる平均遷移時間で割った比を計算し、平均流速を評価することが可能である。
【0032】
別の例としては、最適フィットの値として得た振幅を、ひとたび目盛り付け(キャリブレート)(calibrate)した後は、分析している領域における血量に比例した量と解釈し、振幅と流速の積より流れの値を評価することに用いることができる。
【0033】
さらなる別の例としては、異なる流れの寄与の分布(例えば、分散や歪度)の態様を、個々の潅流の関数の総和をモデル化した最適フィット値より求めてもよい。
【0034】
これらの流れのパラメータの評価は、用いた関心領域(AOI)内に表示してもよいし、または、パラメータ・イメージの形式で二次元マップとして表示してもよい。
【0035】
上述の方法論で求めるS形状関数を用い、(例えば、別々の毛細血管における)遷移時間や再潅流での微小胞の速度の確率密度分布を評価することもできる。
【0036】
このため、本発明のある実施形態においては、S形状関数を、ウェーブレットに分解する手法により解析する。
【0037】
ウェーブレットに分解する手法を用いて解析を行う前に、局所的濃度に比例したエコー信号を2度微分することが好ましい。
【0038】
上記の分解に用いるマザー・ウェーブレットを定めるために、単一の流れの値のためのS形状関数を記述するのに用いた累積正規分布関数の二次導関数を利用してよい。
【0039】
ある別の実施形態においては、エコー信号を、1つまたは複数のステップからなる処理により分析し、異なる流れの遷移時間または速度における寄与の分布を評価する。
【0040】
具体的には、流れ遷移時間または速度の第1のセットを選択し、複数のS形状関数の線形結合を用いてエコー信号への最適フィットを構成し、第1の評価を行う。
【0041】
ある好適な実施形態例においては、第2の評価を行って流れ遷移時間または速度の第2のセットを定める。この場合、第2のセットを定める基礎として第1の評価を用いる。
【0042】
さらに、第2の評価を用いて第3の評価のための値の初期セットを得ることが望ましい。
【0043】
第2の評価ために、3次スプライン補外(cubic spline extrapolation)を利用してもよい。
【0044】
本手法をさらに改善するために第3の評価を行ううえでニューラル・ネットワーク解析を用いてもよい。
【0045】
一般に、ニューラル・ネットワークは、(流れ遷移時間もしくは速度のための)複数の重みと(重み付けされた流れ遷移時間もしくは速度のための)複数のバイアス値で定まる。ニューラル・ネットワークの学習は、バイアス値および重みの反復的調整による。バイアス値および負の重みは、周期的にゼロにリセットすることが望ましい。
【0046】
好適な実施形態においては、上記のリセットは、50ないし100のイタレーション回数に等しい周期で実行される。
【0047】
別の改善法としては、第1の評価は、16個以下の、好ましくは8個以下のS形状関数を用いて行われることが望ましい。
【0048】
また、第2の評価は、少なくとも8個、好ましくは16個の流れ遷移時間または速度からなるセットを用いて行うことができる。
【0049】
本発明は、その別の態様では、上述の方法を実行するためのコンピュータ・プログラムを提供する。
【0050】
本発明は、さらなる別の態様では、上述のコンピュータ・プログラムを具現化したプログラム製品を提供する。
【0051】
本発明は、なおさらなる別の態様では、生きた被験対象の組織における潅流の非侵襲的定量に適したシステムを提供する。
【0052】
本発明は、上記とは別の態様では、上記のシステムにおいて使用する装置を提供する。このような装置は、エコー信号を入力する手段を備える。
【0053】
以下、より具体的に示す。
(1)本発明による方法によってS形状関数から抽出されるパラメータは、用いた設備または設定に依存しない。よって、異なる設備または設定を用いた研究者間で比較を行うことができる。さらに、これらの抽出されたパラメータは、絶対的な定量評価に適している。
【0054】
(2)本発明は、インビボでの血流のパラメータを簡便に定量する方法を提供する。この方法は、実際の器官の潅流が非常に複雑であるにもかかわらず驚異的な性能を示す。走査面に垂直な方向の平均流速の評価が、異なる速度および異なる任意の方向に向かって生じている流れの寄与の重畳がある場合であっても、可能である。
【0055】
(3)本発明によれば、エコー信号のパワーと局所的微小胞濃度との対応を考慮しつつ、高さ方向について超音波プローブの音響的感度の特性を取り込んだパラメータ表現に基づいて曲線フィッティングを行うことができる。そのため、選択したフィッティング関数をどのように修正しようとも、対応する特性は保存される。この条件、および、高さ方向に関する微小胞破壊区域の幅に関する知見に基づき、統計学的分布(例えば、流れ遷移時間もしくは速度)のみならず、絶対的な血流のパラメータを評価することができる。
【発明を実施するための最良の形態】
【0056】
添付の図面は、例示を目的とする。
【0057】
以下の説明で用いる記号を次のように定義する。
x 画像化面内の空間座標。ビームと垂直な(横)方向。
y 画像化面と交差する空間座標。ビームと垂直な(高さ)方向。
z 画像化面内の空間座標。ビームと平行な(深さ)方向。
D 高さ方向(y)における微小胞破壊の空間的範囲。
f 超音波の振動数。
c 音速
λ 超音波の波長
m 自然対数の平均
s 自然対数の標準偏差
μ 対数正規分布の平均
σ2 対数正規分布の分散
γ 対数正規分布の歪度(ゆがみ)
τ 破壊区域縁部から中心までの流れ遷移時間
τmean τの平均
C 微小胞の確率密度または相対濃度
A パラメータ方程式の振幅係数
O パラメータ方程式のオフセット係数
a y方向のハーフ・アパーチャ幅
v 局所的流速(vx,vy,vz成分)
KTx,KRx 送信および受信における2a/λzパラメータ
K K2=KTx2+KRx2で定める送受信パラメータ
Y Y=Kyなる無単位の変数
θ 流れの方向と、画像化面法線とのなす角
β 単一指数関数の「速度」項
GL 映像信号のグレーレベル
t 時間
dt ウェーブレット解析における時間サンプル
η 累積対数正規確率分布関数の偏差項
Γ 任意比例定数
【0058】
本発明は、微小胞による超音波造影剤(UCA)の再潅流の動力学の研究に基づく器官の潅流の定量方法を提案する。本方法は、UCAを調製し、器官もしくは関心領域においてUCA濃度が定常状態に達するまで(通例5ないし30秒間)待ち、画像化面を含むスライス内においてUCA微小胞を破壊せしめるに十分な大きさの音圧の造影剤−破壊フレームを1つもしくは複数個与え、そして、再潅流の、もしくは補充の、動力学をモニタリングするステップを要する。上述したように必要とされる定常状態の潅流に到達させるには、UCAを持続的に注入するか、または、数秒(通例1ないし15秒)の間、ほぼ一定な注入速度を達成するように大量瞬時投与することで実現可能である。
【0059】
<再潅流の動力学>
再潅流の動力学を、局所的UCA濃度に比例した線形化信号、つまり、後方散乱音響パワーに比例した信号、を基に分析する。そうすれば、補充の動力学から潅流パラメータを推定可能である。従来の超音波画像化は、「Bモード」でも「2Dドップラー」でも断層撮影法的手法であって、このような手法では、組織のスライスを合焦させた音響ビームを高速で走査させることにより調査を行う。これらの画像化モデルでの空間的解像度は、3つの次元:画像化面内における音響ビーム幅を横断する方向として定められる横方向、画像化面におけるビーム伝播方向に平行な軸方向、および、画像化面に垂直な方向である高さ方向、のそれぞれにおける様々な深さにおける送受信超音波感度分布によって主に支配される。
【0060】
十分に大きな音圧を加えることでUCA微小胞が破壊されるスライスの厚さは、高さ方向に関する音響ビーム幅および実際に加える音響レベルによって決まる。補充フェーズの間の、UCA微小胞の、破壊のあったスライスのボリューム内への再流入の検出は、超音波検査機器のビームの高さ方向に関する空間感度に基づいて超音波検査機器によって検出される。本願の出願人は、時間の関数として観測されるエコー・パワーと、再潅流の動力学との間の関係性が、高さ方向に関するパルス・エコー・モードの空間送受信分布により一意的に決定されることを発見した。それに対し、一般に受け入れられたこの関係性に対する概念は、指標−希釈の理論からの借用であって、この理論は、均質な媒体におけるランダムな指標の希釈による指標濃度の時間発展を記述する理論である(例えば、ウェイ、K.、ジャヤウィーラ、A.R.、フィルーザン、S.、リンカ、A.、スキフ、D.M.、および、カウル、S.(Wei, K., Jayaweera, A. R., Firoozan, S., Linka, A., Skyhu, D. M., and Kaul, S.)、「クアンティフィケーション・オブ・マイオカーディアル・ブラッド・フロウ・ウイズ・ウルトラサウンド−インデュースド・デストラクション・オブ・マイクロバブルス・アドミニスタード・アズ・ア・コンスタント・ベーナス・インフュージョン」("Quantification of Myocardial Blood Flow With Ultrasound-Induced Destruction of Microbubbles Administered as a Constant Venous Infusion")、サーキュレーション(Circulation)、巻97、1998)。これまでの研究者は、大抵の場合、研究手法を造影剤の補充の間観測される映像強度(輝度)レベルに依っていた。このレベルは、超音波検査機器のいわゆる「対数圧縮」を大いに被っている。よって、以下の一般形で表わされるような単一指数関数を再潅流動力学モデルとして選択していた。
【数1】
ここで、Aは、定常状態振幅であり、βは、単一指数関数の「速度」項であり、時間の原点を、最後のUCA破壊パルスの直後とする。先行技術においては、(例えば、先述のウェイら(Wei et al.)の引用文献においては、)値A、β、およびAβの値は、通例、分析している領域における「血量」、「血流速」、および「血流」に比例する値であると解釈される。しかしながら、この手法は所与の時刻における局所的UCA濃度に比例する関数に基づくものではなく、よって、例えば、ゲイン、対数圧縮パラメータ等の使用者による設定に対する著しい鋭敏性に悩まされている。
【0061】
本発明は、実際の器官の潅流(微小胞の構造、ランダム化している流れ、異なる流れの値の和、等)が非常に複雑であっても、インビボ下で驚く程に上手く機能する簡便な定量方法を提供する。
【0062】
十分に大きな音響強度のパルスを用いたUCA破壊フレームを適用することで、高さ方向については超音波ビーム圧分布によって定められ横方向については超音波プローブの走査する領域の広がりによって定められるボリューム(容積)内のUCA微小胞が欠損させられる。この、UCA破壊フレームを決定する高音響強度パルスは、単一のパルス(単パルス)でもよいし、好ましくは、超音波画像化装置の画像化面内で異なる方向に向けて発せられる複数の単パルス(パルス・シリーズ)であってもよい。UCA破壊フレームは、単一のフレーム(単フレーム)または上述の画像化面に対し順次的に発せられる複数のフレームでもよい。例えば、深部領域にある微小胞の大部分を破壊するには、複数の破壊フレームが必要な場合がある。先述のとおり、発する音響的エネルギー・レベルは、所定の閾よりも高く、UCA微小胞を破壊し得ることが必要である。特に、このレベルは、画像化面内に存在する微小胞の大部分を破壊しうる大きさであることが望まれる。「大部分」を破壊とは、破壊の直後から定常な潅流状態に達するまでの時間に計測した値、つまり、微小胞から受信したエコー信号に実質的な変動が検出される程に、多くの量の微小胞が破壊されることを意味する。実用上は、画像化面内の微小胞の少なくとも50%を破壊すれば、好ましい実験データを得るには十分である。このましくは、破壊される微小胞の量は、少なくとも75%であって、さらに好ましくは90%、なおさらに好ましくは100%である。
【0063】
図1aを参照すれば、超音波検査画像における、破壊された領域に補充される、UCA微小胞の再出現の速さは、原則的には画像内の各場所における局所的な血の潅流の速度と高さ方向における超音波プローブの音響的感度パターンとに支配される。この再潅流の速度、およびさらに一般的には潅流のパラメータの値は未知の変量であり、その評価は、局所組織の病態を診断する臨床医に有益な情報をもたらす。
【0064】
高さ方向の音響的感度パターンは、後で議論するパラメータである。なぜなら、これに対する知見は、本発明を理解する上での基礎となる。連成波モードで励起される矩形形状の合焦アパーチャ領域における高さ方向yについての音圧分布は、次式で近似的に定めることができる。
【数2】
ここで、Γは任意の比例定数であって、
【数3】
であり、「sinc」関数は、
【数4】
であり、fは超音波の振動数、cは伝播媒体中の音速、λは超音波の波長、aは、トランスデューサの高さ方向に関するハーフ・アパーチャであり、zは、トランスデューサのプローブから関心のある深さまでの距離であり、yは、高さ方向における軸外距離である[例えば、キンズラー、LE、フレイ、ARら(Kinsler LE, Frey AR et al.)、ファンダメンタルズ・オブ・アコースティックス(Fundamentals of Acoustics)、J. Wiley & Sons、1982]。パルスによる励起の場合、これは、一般には超音波検査における画像化モードの場合に相当するが、ピーク圧分布のメインローブは、音響パルス波形の中心(または平均)振動数近傍の振動数においては、連成波の場合とよく一致している。
【0065】
局所的に検出された信号の振幅と、局所的UCA濃度との対応を付けることに興味が向かう。そのため、感度パターンを、エコー信号強度を用いて表わすことが望まれる。このパターンは、送信および受信の分布の複合的な影響によって決定可能であって、通例、これらの分布は相違する。超音波トランスデューサにおいては、その高さ方向について、送信においては、音響的パワー分布PTx(y)は、上記の圧分布の自乗により近似的に決定される。例えば、矩形のアパーチャの場合、次の形式を有する関数で表現することができる。
【数5】
ここで、KTxは、超音波の送信条件により定まる。実際には、このパワー分布は、ガウス関数GTx(y)により近似可能である。
【数6】
【0066】
受信モードにおいては、PRx(y)について同様の近似を行うことで次式が得られる。ここで、KRxは、超音波の受信条件により定まる。
【数7】
【0067】
パルス・エコーの場合、軸外の標的に対する超音波トランスデューサのパワー感度PE(y)は、その第1近似においては、送信ビーム分布PTx(y)と受信ビーム分布PRx(y)の積より定める。送受信感度パターンPE(y)は、ガウシアンG(y)を用いて次式のように近似される。
【数8】
よって、送受信のK値の定義は、次式のように導かれる。
【数9】
【0068】
任意の矩形形状を有するトランスデューサのメインローブに関するPE(Y)のG(Y)との密接な対応関係を図1bに示す。ここで、無単位量
【数10】
は、−1から+1までの範囲である。
【0069】
いずれの場合であれ、本願の主目的たる流れの評価方法を説明する上では、この分布の厳密な形状について議論する必要はない。当該超音波画像化および音響学分野の技能を有する者であれば、画像内の異なる深さまたは部分についてKおよびDの値を決定することで、本願発明を、様々な所与の超音波画像化システムの実際のビーム感度パターンおよび微小胞破壊の程度に対して適応させることができる。これらの決定は、後で説明するが、個々のプローブおよび動作条件に対し、簡単なキャリブレーション手続きを一度だけ実行するだけでよい。
【0070】
特に、Kの値は、上述のように理論的に定めることもできるし、または、高さ方向に画像化面を横断して小さな点反射体を走査して記録されたそのプロファイルを高さ方向変位に関する最適フィットガウス関数で調整するようにして送受信ビーム強度を測定し、実験的にKの値を定めてもよい。
【0071】
UCA微小胞が、スライスのボリューム内へ再流入する際、先ず、画像化面に対して垂直な方向への運動を仮定すれば、UCA微小胞の局所的濃度に比例する線形化エコー信号は、高さ方向についてビーム感度で重み付けした送受信パターンで捕らえられる微小胞の割合が増加するように定まる。唯一の値を有する均一濃度のUCA微小胞が、位置y’、
【数11】
までスライスに再流入した場合、ビーム感度PE(Y)により検出される超音波検査のパワー信号E(Y’)は、積分項を含む数式で表わすことができる。
【数12】
【0072】
<「誤差関数」を用いた本発明の実施>
関数PE(Y)が、ガウス関数G(Y)に非常に似ている、というPE(Y)の実際の性状を考慮し、出願人は、エコー・パワー・信号E(Y’)を、「誤差関数」erf(q)を用いて表現することが有効であると考える。誤差関数は次式で定義されるものである[例えば、アブラモビッツ、M.およびステガン、I.A.(編)(Abramowitz, M. and Stegun, I. A. (eds))の、ハンドブック・オブ・マセマティカル・ファンクションズ(Handbook of Mathematical Functions)内の、ガウチ、W.(Gautschi, W.)、「エラー・ファンクション・アンド・フレネル・インテグラルズ」("Error Function and Fresnel Integrals")、ドーバー・パブリケーションズ・インコーポレイテッド(Dover Publications Inc.)、ニューヨーク(New-York)、1972、頁297−329]。
【数13】
【0073】
この定義は、erf(0)=0、erf(−q)=−erf(q)、および、
【数14】
なる性質を有する。一方から(例えば、負の値のY)から、破壊されたスライスへ微小胞が補充されるような物理的状況に対しては、所謂「累積正規分布関数」を使用するのが正しい。この関数を、潅流評価という文脈より、perf(q)と称する。perf(q)は次式で定義される。
【数15】
この関数は、
【数16】
および、
【数17】
なる性質を有する。さらに、perf(q)は、erf(q)を用いて以下のように簡単化することができる。
【数18】
【0074】
上記の定義では、関数perfは、グラフ的には、S形状関数であり、この関数は、図2に例示するように、−∞からYまでの積分で表わす、ガウス分布した送受信ビームG(Y)の感度プロファイルのエネルギである。この関数は、微小胞破壊の後の再潅流過程の開始に対応する初期の実質的に平坦な部分(プラトー)、中央の傾斜部、および、潅流の完了した定常状態に対応する最終プラトー部を有する。本発明のS形状関数はいずれも、データ記録した期間が、最終的定常状態を推定するには不十分な場合、破壊パルスを加える直前に計測された定常状態値を、再潅流信号の漸近的定常状態の予想値として用いてよい。
【0075】
破壊された微小胞の領域が画像化面の両面より対称的に厚さDで延在するとすれば、Yの負および正方向に両方にプローブ軸からD/2の距離の位置を定める。新しい微小胞の流れは、流速vでY方向に破壊されたスライスに補充される。非破壊的なモニタリング・フェーズにおける、時間の関数であるエコー・パワー回復関数E(t)は、以下の一般形で、perf関数を用いて表わされる。
【数19】
ここで、D/2vは、微小胞が破壊された領域の縁部から画像化面中心部に到達するのに必要な時間遅れτである。このようにして、流速vは、局所的微小胞濃度がその最大(または定常状態)値の半分に達するのに必要な時間遅れの測定より実験的に直接的に評価することができる。「平均遷移時間」とみなしてもよいこの遅れは、実験的な線形化エコー・パワー信号を振幅およびオフセットの項に加えて遅れのパラメータτを含むパラメータ方程式で最適フィットさせることで容易に評価可能である。画像化面に垂直な、一定でありかつ均一な流れの場合、これらのパラメータ・フィット方程式F(t)は、次式の形式で表わすことができる。
【数20】
ここで、パラメータO、A、およびτは、それぞれオフセット、振幅、および遷移時間遅れの最適フィット値を表わし、分析している領域における流速は、v=D/2の関係より評価可能である。
【0076】
この流速評価のために必要な先験的知識は、走査面の周りに広がる破壊された微小胞の局所的厚さDのみであり、この値は、各プローブ種、超音波検査機器、および、動作モードについて一度だけ、適当な近似を用いて深さ(デプス(depth))の関数としてマッピングすればよい。異なる深さにおけるDの値は、例えば、ゲル内のUCA微小胞に当てはめて直接的な光学的観察によって破壊された微小胞の程度を評価するといった実験的手法により決定可能である。あるいは、インビボまたはインビトロにおいて、第2の超音波画像化システムを用い、低い音響パワーで第1のシステムの画像化面に垂直な画像化面について破壊されたUCA微小胞の程度を視覚化することで、音響学的に定めてもよい。さらには、Dを、送信ビームのプロファイルおよびUCA微小胞の破壊に関する音圧の閾に関する知見に基づき、理論的に評価してもよい。組織による減衰を考慮するため、深さに関しD値に補正係数を追加してもよい。
【0077】
実際的には、破壊された領域の両方向から等しくUCA微小胞が補充されるが、上述のエコー・パワー補充関数はその場合も有効である。なぜなら、流れの方向は関係が無く、各瞬間において、微小胞の、ビーム内の大域的な濃度のみが問題だからである。
【0078】
また、本発明のS形状関数は、流れのパラメータを評価するためにエコー信号に関連付けされなければならないにも関わらず、特定の環境下では、データ・セットまたは最適フィット関数は、解析に用いるデータ・セットの限定された時間間隔においては、曲線フィッティングに用いる数学的関数のS形状特性を示さないこともある。このような場合は、例えば、高さ方向にて、超音波ビームの調査するボリューム(容積)内の微小気泡がほんの少しだけ破壊された場合や、または、例えば、早い流速がある場合にはフレーム・レートが有限である(制限がある)ため、実際の微小気泡の補充を十分にサンプリングできないような場合である。
【0079】
微小胞の速度ベクトルと走査面の法線とのなす角θが、ゼロ度ではなく、90度ではない任意の角度である場合、評価したvと、最適フィット・パラメータτとの関係は簡単に次式のように表せる。
【数21】
【0080】
流れの方向θに関する知見が無い場合、流速は、θ=0として評価され、その流速は、画像化面に垂直な速度成分vyに相当する。
【0081】
本方法の有する驚くべき特徴の1つは、走査面に垂直な方向の平均流速、
【数22】
の評価は、異なる任意方向θiの流速viからの寄与が重畳されている場合であっても、可能である点である。これについては、後で説明する。N個の異なる方向、および/または、N個の異なる速度で流れる微小胞の寄与がある場合、エコー信号のパワーは、次式で表わされる。
【数23】
ここで、
【数24】
および、
【数25】
であり、Ciは、速度Viyについての微小胞の相対濃度である。これは、個々のy方向についての相対速度で定義される。この場合、E(t)の形状は、もはや純粋なperf関数のものを示さない。
【0082】
<「対数perf(logperf)」再潅流関数を用いた本発明の実施>
実験的な再潅流のパワーのデータを上手く曲線フィットするため、換言すれば、上述のような異なる流れの総和として現われるパワーのデータを上手く曲線フィットするため、累積対数正規確率分布関数の形式を有する、経験的パラメータを備えたS形状関数を用いればよいことがわかった。これより説明にて用いるこの関数は、今後対数perf(logperf)再潅流関数、
【数26】
と称し、ここで、O、A、τ、およびηは、フィッティングのパラメータである。驚くべきことに、このlogperf(t)関数を用いて実験的な再潅流のエコー・パワー信号をフィットすると、平均遷移時間を上手く評価することができる。この平均遷移時間は、最適なフィットとなるτの値として求まる。フィッティング関数としてこのlogperfパラメータ関数を用いた例を図3aおよび図3bに示す。実験的データを求めるためには、ヴェルトマンら(Veltman et al.)らの開示による設定の1つと類似の設定を用いた(「オン・ザ・デザイン・オブ・ア・キャピラリー・フロウ・ファントム・フォー・ジ・エバリュエーション・オブ・ウルトラサウンド・コントラスト・エージェンツ・アット・ベリー・ロウ・フロウ・ベロシティーズ」("On the design of a capillary flow phantom for the evaluation of ultrasound contrast agents at very low flow velocities")、Ultrasound in Med. Biol.、28(5)、625−634、2002)。マイクロファイバ束(内径240μmのファイバ170本、Hospal AN69、フランス)は、微小気泡浮遊液(懸濁液)(およそ2−3μmの平均径を有し、全フッ素置換ブタンガスが含まれる、リン脂質安定化微小気泡)で潅流される。この微小気泡浮遊液(懸濁液)は、蠕動ポンプ(ギルソン・ミニパルス3(Gilson Minipulse 3)、フィリーア・ル・ベル(Villiers le Bel)、フランス)の制御の下、1ないし30mm/sの範囲の流速値を有する。マイクロファイバに沿って流れる微小気泡は、蒸留水に、およそ10の6乗気泡毎mL程度に希釈されている。
【0083】
使用した超音波検査機器は、エサチューン・スキャナ(Esatune scanner)(エサオテ、フローレンス、イタリア(Esaote, Florence, Italy)、)で、CnTI(S)(造影剤調整画像化)モードで使用した。共に用いたプローブは、LA532Eプローブである。送信周波数は、2.6MHzであり、フレーム・レートは、43Hzであり、再潅流モニタリングに関するメカニカル・インデックス(Mechanical Index)は、0.07であり、最大送信パワーで1秒間の破壊フレーム・シークエンスを用いた。プローブを、流れの方向と画像化面との成す角が50度となるようにしてマイクロファイバ束の断面画像を作成するように配置した。リアルタイムrf信号は、高速rfグラバ(fast rf-grabber)(FEMMINAの、スキャビアら(Scabia et al.)、「ハードウェア・アンド・ソフトウェア・プラットフォーム・フォー・プロセッシング・アンド・ビジュアライゼーション・オブ・エコグラフィック・ラジオ−フリケンシー・シグナルズ」("Hardware and software platform for processing and visualization of echographic radio-frequency signals");IEEE Trans. Ultra. Ferr. Freq. Contr.、49(10)、1444−1452、2002)を用いて、各破壊−補充シークエンスに対して15秒間収集した。使用者定義の関心領域(AOI)内の平均エコー・パワー信号を計算し、破壊後の、マイクロファイバ内のUCA微小気泡の補充を求めた。このデータ・ポイントは、図3aおよび図3bにおいて点で示している。流速値は、それぞれ4mm/sおよび8mm/sである。
【0084】
フィッティングを行う前に、Dの値を、光学的に、およそ5×10の6乗個毎mLの微小気泡を含む1.5%アガロース・ゲル内の破壊された区域の幅を計測することにより、7.2mmと定めた。logperf関数は、マットラブの曲線フィッティング・ツールボックス(Matlab Curve Fitting Toolbox)(マスワークス(MathWorks)、ナティック、マサチューセッツ、米国(Natick, MA, USA))で実現し、最適フィットは、トラスト・リージョン法(Trust Region method)(ビルド、R.H.、R.B.シュナベル、および、G.A.シュルツ(Byrd, R. H., R. B. Schnabel, and G. A. Shultz)、「アプロクシメート・ソリューション・オブ・ザ・トラスト・リージョン・プロブレム・バイ・ミニマイゼーション・オーバー・ツー−ディメンジョナル・サブスペーシズ」("Approximate Solution of the Trust Region Problem by Minimization over Two-Dimensional Subspaces")、マセマティカル・プログラミング(Mathematical Programming)、巻40、頁247−263、1988)を用いて計算した。最適フィットは、図3aおよびbにおいて実線で示す。図3aおよび図3bのそれぞれに関し、τmean値は、1.421および0.6714であり、η値は、0.6197、および、0.8079であり、A=1114および1258である。これら、τmean、θ、および、D値により、評価される平均流速値は、図3aおよび図3bのそれぞれについて、3.9mm/sおよび8.3mm/sである。これは、実値4mm/sおよび8mm/sとよく一致している。
【0085】
図4aおよび図4bに、単一指数関数フィットに基づく評価にかかる本発明の主たる有利点を示す。ここでは、2つの異なる機器ゲイン値(ハイ・ゲインは、ロー・ゲインの2倍である)で、角θを60度とし、流速値を増加させながら、上述したインビトロ設定を用いた。図4aは、先行技術による最適フィットにより得たβ値を示す。評価の線形性は良好であるが、用いた2つのゲイン値の間で顕著な差違が認められる点に注意されたい。例えば、流速20mm/sにおいては、βの評価値は、ロー・ゲインの場合およそ3.3s−1であり、ハイ・ゲインの場合およそ4.7s−1である。このことは、先行技術の方法は、システム依存性を有することを示している。図4bは、logperf関数を用いて最適フィット値を求めた場合における、D/(2τ)の評価値を示す。評価の線形性は良好でありかつ、評価の絶対値が、試験に用いた2つのゲイン値において、実値の5%以内(回帰直線に対し、
【数27】
)にある点に注目されたい。流速20mm/sの同様の例においては、D/(2τ)の評価値は、ロー・ゲイン値およびハイ・ゲイン値の両方において、およそ19mm/sである。このことが示すのは、本発明によるlogperf関数を用いた流速の評価は、絶対的な物理量と同様に、システムに依存しない、ということである。本発明による方法で抽出したパラメータは、このように、使用する設備や設定に依存しない。よって、異なる設備や設定を用いる研究者間で比較が可能である。さらには、これらの抽出したパラメータは、絶対的な定量評価に適している。
【0086】
<「対数正規」的流れ分布に対する本発明の実施>
UCAの補充分析を用いて、未知の組織内における対数正規流れ分布の平均(ミーン(mean))、分散(バリアンス(variance))、および、歪度(スキューネス(skewness))の最適な評価を算定することができる。このことは、微小血管網の構成に関する情報を与えてくれる。一般に、組織潅流は、平均遷移時間τを有する血管の対数正規分布で、疑連続的に表現される。組織に血液と同じ速度で微小胞が潅流する場合、微小胞濃度C(τ)の分布は、次式、
【数28】
のような形式を有する対数正規確率密度分布で記述され、ここで、mおよびsはそれぞれ、τの自然対数の平均および標準偏差である。対数正規分布の平均μ、分散σ2、および、歪度γは、
【数29】
【数30】
、および、
【数31】
で与えられる。上述の遷移時間の確率密度は、1に規格化されていることを確認する。
【数32】
【0087】
出願人の観察によれば、未知組織内の対数正規流れ分布の平均、分散、および、歪度の評価は、エコー・パワーE(t)を流れ遷移時間τの対数正規分布で重み付けした個々のperf関数の結合で表わすことで、可能である。本願ではlognormperf(t)と称するこの関数は、
【数33】
ここで、全ての変数は、先に定義したとおりである。
【0088】
図5aおよび図5bは、シミュレーション例を用いて2つの遷移時間の対数正規分布を例示している。ここで、一方は、σ2=0.5、γ=1.88であり、他方は、σ2=0.02、γ=0.34であり、両者においてτmean(=μ)=1.25である。これらの2つの分布より、図6aおよび図6bに示すような補充関数lognormperf(t)=E(t)が得られる。ここで、本例におけるパラメータは、O=0、A=1、D=7.2mm、θi=0、および、K=1.41mm−1である。図6aおよび図6bに示す2つの例の差違から、lognormperf(t)=E(t)の形状は、遷移時間分布の歪度(スキューネス)に対して依存性があることがわかる。その形状は、低歪度分布(γ=0.34)の場合、perf関数に非常に近く、高歪度分布(γ=1.88)の場合、より鋭敏な立ち上がりと緩やかな「肩部(ショルダー)」(定常状態値に近づく変曲度)を有するS形状を有する。
【0089】
図7aおよび図7bは、遷移時間の対数正規統計的分布に対する上述の考察を示す例図である。ここでは、図3aで用いたものと同じ実験データを例として用いている。本例においては、データ・ポイントは、lognormperf(t)のパラメータ表現形式を用いてフィットしている。この式では、流れ遷移時間の対数正規分布は、パラメータmおよびsを含む。Kの値は、測定にかかる物理的条件を考慮し、0.2761mm−1とした。つまり、a=2.5mm、f=2.6MHz、z=45mm、c=1480mm/s、送信および受信で同じ、とした。(D=7.2mm、オフセットO=0で)最適フィット値として得た値は、流速4mm/sおよび8mm/sに対しそれぞれ、μ=1.53および0.78、σ=0.47および0.39、γ=0.96および1.6、A=1114および1258である。これら2例に対応する流れ遷移時間の対数正規確率密度分布を図8に示す。関連して評価した流速は、θ=50度で3.7mm/sおよび7.2mm/sである。この例においても、実際に課された流速、4mm/sおよび8mm/sとそれぞれよく一致している。
【0090】
図6aおよび図6bに示す補充関数の注目すべき特徴は、これら2つの流速の条件からは大きく異なった歪度値を有する分布が導かれるにもかかわらず、対応する平均遷移時間評価値μ=τmeanが、定量的な意味で、実際の平均流速と一致することである。
【0091】
即ち、本発明による、気泡破壊後の、パラメータによる流れ評価は、関心のある深さ(デプス)のそれぞれにおける気泡破壊の厚さDに関する知見にのみ基づき画像化面に垂直な方向における平均流速の直接的な評価が可能である。
【0092】
例えば様々な器官における微小血管系を表現するために流速および遷移時間に関する対数正規分布を求めた場合、再潅流関数E(t)の実際の形状を分析すれば、流れ分布の分散および歪度を評価することができ、よって、組織の病態を診断することも可能である。このような評価は、実験的な線形化エコー・データから、perf関数もしくはperf関数の線形結合を用いて上述のようにして導出した曲線フィッティングパワー信号より行うことができる。
【0093】
<別のS形状関数による本発明の実施>
上述のperf関数は、高さ方向にガウシアン的なビーム感度を有する画像化面内における単一の流れのチャネルに関するエコー・エネルギの再潅流を正確に表わすのだが、例えば三角関数や多項式といったS形状関数の等価なパラメータ表現形式を用いても、実用上問題のない精度でerf関数を近似することができる。これら等価な形式は、erf関数を周知の方法で近似することで求めることができる。そのような例としては、
【数34】
ここで、a1=0.278393、a2=0.230389、a3=0.000972、a4=0.078108、ならびに、q≧0の場合、sign(q)=1、q<0の場合、sign(q)=−1、または、
【数35】
がある。また、これらに限るものではない。また、上記事実は、
【数36】
であることを意味する。
【0094】
これら近似的な表現形式を用い、観測された再潅流パワー関数を、対数正規分布といった流れ遷移時間もしくは流速の確率分布で重み付けしたperf関数の積分とフィットさせればよい。流れ分布の平均流速、分散、または、歪度といったパラメータを、観測したデータの最適フィットから評価することができる。これらパラメータの計算は、超音波検査画像内部で使用者が限定したエコー・エネルギ領域(「関心領域」)で求めてよい。この関心領域は、使用者がマニュアルで定めてもよいし、超音波検査画像に境界を描写する周知の方法や、解剖学的な器官の形態に基づいて自動的に定めてもよい。あるいは、個々の画像要素内でパラメータを計算してもよい。画像要素とは、例えば、デジタル映像のピクセル(画素)、画素群、局所的画像解像度より定まる個々のスペックル「粒(グレイン)」、もしくは、画像の自動的に決定されるその他の領域を含む。このパラメータ計算により、空間的パラメータ・マップ(spatial parameter cartography)として表示することができる。空間的パラメータ・マップは、パラメトリック画像化とも称される。この場合、使用者が関心領域を定める必要はない。
【0095】
<遷移時間または速度の確率密度分布評価>
上述のようにして本方法により求められたS形状関数を用いて(例えば、異なる毛細血管内の)再潅流の際の微小胞の遷移時間または速度の確率密度分布を評価することもできる。周知のことだが、健常な組織(つまりは、異常の無い場合)においては、微小胞の流れは血液と同じ速さで流れる。この場合、遷移時間もしくは速度の分布は、対数正規分布と一致する。故に、分布を評価することで、単に対数正規分布と比較すれば、生理学的異常性を検出することができる。
【0096】
我々は、確率密度分布関数を算定する新しい方法を開発した。この方法は、先述の関数のパラメータの少なくとも1つの値と、局所的組織潅流値もしくは属性を備えたS形状特性とを対応付けるような場合に特に有利である。しかしながら、以下に説明する新しい方法は、例えば、エコー・パワーの、時間の関数としての線形的増加および指数関数的減衰が特徴的に含まれるようなUCAの大量瞬時投与(ボーラス・アドミニストレーション)といった、別の潅流分析のような状況における確率密度分布関数の算定においても有用である。
【0097】
<ウェーブレット解析を用いた本発明の実施>
再潅流エコー・データを、遷移時間の対数正規もしくは正規分布の帰結と捉えるのではなく、未知の、個々のperf関数の総和の帰結と捉えて解析することができる。この場合、潅流関数の2次時間微分または平滑化もしくはローパス・フィルタをかけた潅流関数に適用した連続ウェーブレット分解が、流れ遷移時間の確率密度の評価の有用であることが判っている。ここでは、ウェーブレット・スケールおよび遅延の係数(delay coefficients)を評価するための「マザー・ウェーブレット」(または、モデル・ウェーブレット)は、速度vmwを有するperf関数の2次導関数を選択することができる。この関数は、ウェーブレットに関する定義からの要請の全てを満足する。連続ウェーブレット変換のスケールの係数scおよび遅延の係数delは、デジタル的表現では、気泡破壊区域のUCA補充という本説明の文脈を考慮して次式、
【数37】
および
【数38】
のように表わされ、ここでdtは、サンプリングの時間間隔である。
【0098】
図9a、b、c、dは、再潅流曲線の2次時間導関数に対して連続ウェーブレット変換を用いた、任意の遷移時間分布の評価の過程を示す図である。理論上の再潅流の例である図9aを解析する。この例は、実際には、およそ0.56秒および1.35秒あたりにそれぞれの平均値を有する複峰性の遷移時間分布として与えられる。この関数の2次導関数を、相対振幅スケールで図9bに示す。ウェーブレット分解に用いるマザー・ウェーブレットを図9cに示す。実際には、これは、基本的なperf関数の2次導関数により与えられる。図9dは、ウェーブレット分解の結果と、図9aの再潅流関数の生成に用いた本来の複峰性の遷移時間分布との比較を示す。この比較より、本発明の流れ分布評価の文脈におけるウェーブレット解析の実用性を確かめた。フーリエ、ラドン、ヒルベルト、Z−、もしくはその他の積分変換を用い、再潅流関数に関する同様の解析を行い、遷移時間分布の評価を行うことができる。これらの解析はいずれの場合においても、潅流遷移時間の値が個別的に、時間の関数として、本願明細書に開示のperf関数のタイプの寄与をパワーに対して及ぼす、という認識に基づいている。
【0099】
上記の手法により、観測された再潅流のデータのフィッティングを行う別の方法には以下のものが含まれる。それは、実験データに対し、例えば移動平均、ローパス・フィルタリング、メジアン・フィルタリング、等もしくはこれらの組み合わせといった既知の形式の平滑化または時間平均化を、曲線フィッティングの前に実行することである。これは、特定の場合において有利なことがある。さらに別の方法には、本願の開示するS形状フィッティング関数で、「非−線形化」エコー・データ(例えば、対数圧縮データ)を曲線フィッティングすることがある。ここでのS形状フィッティング関数は、エコー信号の非線形応答性をもたらした過程と同一の過程(例えば、S形状関数に対する対数圧縮)で修正を加えている。
【0100】
<ニューラル・ネットワーク解析を用いた流速の確率密度分布の再構築>
本発明の別の実施形態においては、再潅流エコー・データを、1つまたは複数のステップからなる処理により解析する。
【0101】
本解析の開始点は、上述のエコー・パワー補充信号E(t)である。
【0102】
明瞭な説明のため、関連する式を再掲する。高さ方向に関するパルス−エコー音響感度パターンPE(y)はガウシアンG(y)を用いて次のように近似される。
【数39】
【0103】
好都合にも、補充関数E(t)は次式、
【数40】
と表わされ、ここでは、
【数41】
【数42】
、および、
【数43】
であり、かつ、Oはオフセット係数であり、Aは、振幅係数であり、
【数44】
は、微小気泡が破壊区域の縁部から中心部まで移動するのに必要な遷移時間である。
【0104】
微小胞の速度ベクトルvとy方向との成す角がゼロ度および90度でない、任意の角θvである場合、perf(t)の定義(1.3)は、
【数45】
となり、ここで、
【数46】
かつ、
【数47】
であり、ここで、
【数48】
である。
vyは、y方向に沿ったvの成分であるとする、つまり、
【数49】
である。よって、
【数50】
であり、ここで、
【数51】
である。
【0105】
(1.6)は、定義(1.3)においてvをvyに、そしてτをτyにしたものに等しい。perf(t)(1.6)は、vyのみ、または、τyのみ、のいずれかを用いて次のように正確に表現することもできる。
【数52】
【数53】
【0106】
関心領域において、多くの毛細血管が存在し、各毛細血管は、唯一無二の再潅流速度で特徴付けられる。よって、各毛細血管の補充関数は、(1.7)または(1.8)(個別のperf関数)、
【数54】
または、等価的に、
【数55】
で与えられる。
【0107】
もし、P(vy)が、関心領域におけるy方向の速度成分の確率密度分布であれば、その領域におけるエコー・パワー補充関数E(t)は、各毛細血管による影響(作用)の確率で重み付けした、個別のperf関数の結合、
【数56】
として表わすことができる。
【0108】
(1.9)の離散形式は、
【数57】
である。
【0109】
確率密度分布P(v)は、正規化による特性、
【数58】
を満足し、よって、
【数59】
である。
τyを用いれば、
【数60】
となり、その離散形式は、
【数61】
であり、ここで、P(τy)は、関心領域における確率密度分布τyである。(1.11)および(1.12)と同様に、
【数62】
であり、
【数63】
である。
【0110】
表記の簡単化のため、以下の説明では、添え字Yは省略する。よって、表記vおよびτを、vyおよびτyの代わりとして用い、それぞれ、速度および遷移時間と称することにする。
【0111】
健常な組織(異常性の無い場合)の特徴として、微小気泡が、血液と同じ速度で流れる場合、P(v)は、対数正規確率密度分布、
【数64】
をとり、ここで、mおよびsはそれぞれ、vの自然対数の平均および標準偏差である。
【0112】
同様に、τを用いれば、健常な組織は、
【数65】
で特徴付けすることができ、ここで、mおよびsはそれぞれ、τの自然対数の平均および標準偏差である。
【0113】
図10は、対数正規をとる場合の補充関数の例を示す図である。この曲線を形成するために、式(1.10)を用いており、ここでは、
−対数正規確率密度分布のパラメータは、m=1.5、s=0.45であり、
−速度ベクトルは、
【数66】
であって、ここで、
【数67】
である。
【0114】
式(1.10)および(1.13)は、(個々の)perf関数の線形結合として補充関数を表わしている。実際のエコー・パワー補充信号は次式、
【数68】
で表わされ、ここで、E(t)は、(理論上の)補充関数であり、N(t)は、ノイズを表わす。
【0115】
故に、補充フェーズの各瞬間t1,...,tjにおいて記録される信号のベクトルは、
【数69】
と表せる。
【0116】
ここでの目的は、P(v)またはP(τ)の形式に関する情報を何ら仮定せずに、E’から、任意のi(∀i)について、P(vi)または、等価的に、P(τi)に関する良好な近似を求めることである。
【0117】
以下、vおよびτについて特に区別せずに、課題となっている定式化を行う。とくに、P(v)もしくはP(τ)の再構築については、区別せずに示す。これより、新しく開発した、単一もしくは複数のステップからなる方法を示す。この方法は、第1のステップについてMatlab(登録商標)のオプティマイゼーション・ツールボックス(Optimization Toolbox)、ならびに、第2およびそれ以降のステップについてMatlab(登録商標)のニューラル・ネットワーク・ツールボックス(Neural Network Toolbox)を用いて有利に実施することができる。
【0118】
<第1のステップの実行>
E’は、(1.16)による定義で、そして、sum_perf(p,t)を線形結合、
【数70】
で定義される関数とする。ここで、p=(p1,...,pn)は重み係数であり、nは、解析で考慮する流速の数である。次に、sum_perf(p)を、
【数71】
で定義されるベクトルとする。
【0119】
sum_perfをpの関数と考えるのであれば、pに関する関数f(誤差関数)は、
【数72】
と定義することができる。
しかして、ここでの目的は、制約付き(束縛されている)非線形多変数関数の最小、
【数73】
を、
【数74】
の条件で求めることである。
実際、制約(束縛)関数(1.18)の解pminを求めることができれば、簡単なルール、
【数75】
よりP(vi)の近似が可能である。
【0120】
さらに、補充関数の近似は、次式、
【数76】
により可能である。
【0121】
Matlab(登録商標)のプログラミング言語には、オプティマイゼーション・ツールボックス(Optimization Toolbox)と呼ばれる、最小化問題を解く上で非常に有用なツールボックスが含まれている。特に、Matlab(登録商標)の関数fminconは、初期推定から出発して複数の変数を有するスカラー関数に関し制約付き(束縛)状態での最小値を求めるものである。fmincon関数は、インテリア・リフレクティブ・ニュートン法(interior-reflective Newton method)に基づく部分空間信頼領域法(subspace trust region method)を用いている。インテリア・リフレクティブ・ニュートン法については、コールマン、T.F.、および、Y.リ(Coleman, T. F. and Y. Li)、「アン・インテリア、トラスト・リージョン・アプローチ・フォー・ノンリニア・ミニマイゼーション・サブジェクト・トゥ・バウンズ」("An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds")、SIAMジャーナル・オン・オプティマイゼーション(SIAM Journal on Optimization)、巻6、頁418−445、1996、および、コールマン、T.F.、および、Y.リ(Coleman, T. F. and Y. Li)、「オン・ザ・コンバージェンス・オブ・リフレクティブ・ニュートン・メソッズ・フォー・ラージ−スケール・ノンリニア・ミニマイゼーション・サブジェクト・トゥ・バウンズ」("On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds")、マセマティカル・プログラミング(Mathimatical Programming)、巻67、号2、頁189−224、1994に記載がある。各イタレーションにおいて、前処理付共役勾配法(preconditioned conjugate gradients)(PCG)を用いて大規模な線形システムの近似解を求めている。
【0122】
fの勾配に対する解析的な式を、fminconに与えており、勾配は、数値的に求めることがない。そのため、このアルゴリズムがより精確なものになっている。fminconに代入すべき初期推定の選定は、非常に重要である。実際、(制約付(束縛された))関数fは、数多くの極小を有しており、これにより補充関数E(t)の良好な近似を求めることが可能であるが、P(vi)は、良好な近似が得られるとは限らない。
【0123】
【数77】
の場合、次に示す初期推定を用いれば非常に良好な結果が得られる。
【数78】
【数79】
【0124】
所与の、関心を寄せている間隔における速度値は、その等差数列(算術数列)または等比数列(幾何数列)を用いて選ぶことができる。
【0125】
示す図である。速度ベクトル(1.15)(図10のサンプルを構築するのに用いたもの 図11は、図10に示す補充関数E(t)のサンプルから、P(v)を再構築する例をと同一、つまり、n=32)を用いたアルゴリズムを適用している。
【0126】
図12は、複峰性確率密度分布、
【数80】
ここで、
【数81】
の場合の再構築を示す図である。
【0127】
実際の実験による信号の場合にどのアルゴリズムが有効であるかを判断するため、次式、
【数82】
で構築したサンプルで試みてみる。ここで、N(t)は、瞬間の信号と比較して10%のエネルギ振幅を有するホワイト・ノイズ時系列信号である。
【0128】
図13は、対数正規P(v)の場合に(1.23)で構築した「ノイズを含んだ」("noisy")サンプルの図である。図14は、このノイズを含んだサンプルより得た、対数正規P(v)の再構築を示す図である。
【0129】
図14より、相対的に高いノイズを含む場合には精度が損なわれることが明らかである。よって、このような単一のステップによる方法は、ノイズが低いサンプルの場合には特に有用である。ノイズを含むサンプルに対しては、第2および第3のステップを備えた方法を完遂する方が有利である。その方法について、以下に説明する。先に第1のステップにおいて考察した際の速度の数nは、減少させている。
【0130】
<第2および第3のステップの実行(ニューラル・ネットワーク)>
ニューラル・ネットワークの基本的な対象は、ニューロン(neuron)である。シンプル・ニューロン(simple neuron)のモデルは、次のようにして記述することができる。スカラー入力uが送信され、スカラー重みpで強度を積算する接続部を通り、積p・uが求められる。この量もまたスカラーである。そして、p・uの総和(サム)およびバイアスbが、伝達関数gの項となる。この関数は、スカラー出力aを生成する。一般に、伝達関数は、階段関数、もしくは、シグモイド関数、または、恒等関数(id)である。
【0131】
ベクトル入力を備えるニューロンにおいては、入力uは、ベクトルu=(u1,...,un)であり、pは、重みベクトルであり、内積p・uは、バイアスbを伴って総和され、伝達関数gの項を形成する。この関数は、図15に示すように、スカラー出力aを生成する。
【0132】
先に述べたニューロンの2つまたは3つ以上をレイヤ(layer)において結合することができる。ニューラル・ネットワークは、このようなレイヤを1つまたは複数備えることができる。しかしながら、このような複雑なネットワークを詳細に考慮する必要性はない。実際には、ベクトル入力を備えたただ1つのニューロンで形成されたネットワークを用いれば十分である。ネット(net)を、このようなタイプのネットワークとし、g:=idをその伝達関数とする。ネット(net)は、Matlab(登録商標)の関数newlinで作ることができる。
【0133】
ニューラル・ネットワークは、特定の入力に対し特定の出力を行うように重みおよびバイアスの値を調整することによって学習させることができる。よって、ネットワークであるネット(net)の学習過程には、入力ベクトルu1,...,un、および、対応する目標出力ベクトルa=(a1,...,an)が必要である。学習の際、ネットワークの重みおよびバイアスは、反復的に調整され、ネットワーク・パフォーマンス関数(net.performFcn)は最小化される。newlinで作成される、デフォルトの、ネットワークのパフォーマンス関数は、平均二乗誤差(mse)であり、ネットワークの出力w=g(p・u+b)=id(p・u+b)=p・u+bと目標出力aとの間の平均2乗誤差は、次式で表わされる。
【数83】
【0134】
uiは、次式、
【数84】
で表わされる列ベクトルと定義する。
aは、次式、
【数85】
で表わされるベクトルと定義する。
【数86】
であるので、
【数87】
である。ここで、sum_perf(p)は、(1.17)の定義に従う。
【0135】
上述のとおり、学習の際、ネットワークの重みおよびバイアスは、反復的に調整されて、mseが最小化される。もし、バイアス値がゼロに初期化され、学習の間ずっとゼロに非常に近い値に保たれるのであれば、この最小化問題は、上述の第1のステップにおいて論じた問題(1.18)ととても類似した最小化問題である。
【0136】
バイアス値の問題の他にも、解決すべき問題がある。それは、どのようにして重みを正もしくはゼロに制限するか、ならびに、どのようにして重みの初期推定を選定するか、である。これらについては、以下の手法を用いている。
1. バイアス値:バイアス値は、初期化でゼロとし、50回もしくは100回のイタレーションでゼロにリセットする。
2. 重みの初期評価:先のセクションで説明したオプティマイゼーション・アルゴリズム(optimization algorithm)を、均一に分布した8つの速度veight=(veight1,...,veight8)にのみ適用し、(1.19)を用いて解析の第1のステップの為に、P(veight1),...,P(veight8)の8つの近似を求める。これら、速度領域における8つの値を3次の平滑化スプライン(Matlab(登録商標)の関数csaps)でフィッティングし、均一に分布したv1,...,vnにおけるこのスプラインを評価し、そして、最後に各値をvi+1−viで積算することで、解析の第2のステップの為に、重みに関しn個の初期評価を求める。ここで、nは、第1のステップで選択した値よりも大きな任意の値(例えば、図16−18の場合におけるn=32)でよい。一般的には、解析の第1のステップにおいて考慮する速度の初期の数は、4ないし16であり、好ましくは、6ないし10である。その一方で、第2のステップに対しては、考慮する速度の数は、8ないし64であり、このましくは、16ないし48である。
3. 重みにかかる非負の制約:50回もしくは100回のイタレーション毎に、負の重みは全てゼロに置換する。
【0137】
これらの規則および学習のMatlab(登録商標)の関数traingdxを用いることで非常に良好な結果を得ている。traingdxは、バッチ・グラジエント・デセント・モーメンタム(batch gradient descent momentum)およびアダプティブ・ラーニング・レート(adaptive learning rate)に基づいて重みおよびバイアスの値を更新する。
【0138】
・ グラジエント・デセント(gradient descent):グラジエント・デセント・アルゴリズムは、ネットワークの重みおよびバイアスを、パフォーマンス関数mseが最も急速に減少する方向に、更新する。つまり、その方向は、グラジエントの反対の方向である。このアルゴリズムのイタレーションは、次式、
【数88】
と書くことができる。ここで、WIは、現在の重みもしくは現在のバイアスのベクトルであり、gIは、現在のグラジエントであり、αIは、ラーニング・レート(学習率)である。
【0139】
・ バッチ・モード(batch mode):バッチ・モードにおいては、ネットワークの重みおよびバイアスは、ネットワークに全ての学習セットが適用された後でのみ、更新される。
【0140】
・ グラジエント・デセント・ウィズ・モーメンタム(gradient descent with momentum):モーメンタムは、グラジエント・デセント・アルゴリズムに追加することのできる手法の1つであって、ネットワークを、局所的グラジエントのみならず、誤差表面の最新の傾向に応答させることを可能にする。ローパス・フィルタのように機能し、モーメンタムによって、ネットワークは、誤差表面の小さな形態を無視することが可能となる。
【0141】
・ アダプティブ・ラーニング・レート(adaptive learning rate):学習率(ラーニング・レート)を、学習過程において変更可能とすることで、グラジエント・デセント・アルゴリズムの性能を向上させることができる。
【0142】
さらに、ノイズによる負の影響を低減するために、メジアン・フィルタ(median filter)(Matlab(登録商標)の関数medfilt1)を、この新しいアルゴリズムを適用する前に、ノイズを含んだベクトルE’に適用する。
【0143】
その結果を、以下に示す。
【0144】
結果を示す前に、負の重みの全ておよび現在のバイアスを、50回もしくは100回のイタレーション毎にゼロに置換する利点を示し、停止の基準の理論的説明を行う。
【0145】
学習のためのイタレーションの間、パフォーマンス関数mseの値が減少しているのに、アルゴリズムを停止させて負の重みの全ておよび現在のバイアスをゼロに置換すると、学習過程で得た関数の値が修正され、その結果、mseが増加する。そのため、イタレーションは、大きな値のパフォーマンス関数で再開する。
【0146】
停止までのイタレーションの回数Jが小さすぎると、mseが増加するまでに十分に減少せず、アルゴリズムに悪影響が及ぶ。
【0147】
経験的に得られていることだが、図16ないし18に示した特定の例においては、最適な結果を得るには、Jは、50以上であることが好ましい。一般的には、J値は、少なくとも10であることが望まれ、さらには、少なくとも25であることがなおさらに望まれ、なおさらには、少なくとも50以上で、例えば、200までの値であって、例えば100であることが望まれる。
【0148】
適用している停止基準について言えば、mseの相対的変化量が、指定した許容値(トレランス)tolを下回った場合に、停止する。mseの相対変化量は各イタレーションで測定するものではなく、負の重みおよび現在のバイアスがゼロに置換された場合は常に行われることに注意されたい。そのため、総イタレーション数は常にJの倍数である。
【0149】
vを用いて第1および第2のステップについて説明したが、vの代わりにτを用いて記述することも可能である。vの代わりにベクトルτを用いてサンプルE’を構成し、それをアルゴリズムを用いて解析する点のみ異なる。
【0150】
図16、17、および、18は、それぞれ、n=32、かつ、J=25、50、および、100で、同様のノイズを含んだE’(10%ホワイト・ノイズ)から対数正規P(τ)(m=−0.2191、s=0.45)を再構成した例を示す図である。いずれの場合であっても、アルゴリズムは、mseの相対変化量が許容値tol=0.01を下回ったため、停止した。しかし、J=25の場合のmseの最終的な絶対値と、J=50、100の場合のmseの最終的な絶対値との間には顕著な差違が見受けられる。表1は、mseの初期値および最終値を示す。本表より、J=25としたある例は、P(τ)を再構築するのに十分な程にmseを減少させることができなかったことは明らかである。
表1.mseの初期値および最終値
| 初期mse | 最終mse
――――――+―――――――――+――――――――
J=25 | 111.434 | 12.5768
J=50 | 111.434 | 0.5925
J=100 | 111.434 | 0.4729
【0151】
式(1.23)を用いて合成データE’を構築した場合、オフセット係数Oおよび振幅係数Aには、それぞれ、所与の値を用いる。この場合、これら既知の値を、アルゴリズムの適用に際して使用することができる。あるいは、実データを取り扱う場合、O=0と仮定してもよいが、振幅の値は未知である。Aに関する第1の近似は、E’に関する漸近値を仮定して、求め、この値を解析に下折る。しかしながら、この方法は、本問題を取り扱ううえで完全に十分な方法とは言えない場合もある。そのため、実際例において本手法の効率を向上させるために、以下のような修正を加えることができる。
【数89】
で定義される
【数90】
を、perfτ(t)の修正式とする。
この修正により、補充関数は、次式、
【数91】
のように表わすことができる。
【0152】
perfτ(t)の代わりに、この新しい
【数92】
にアルゴリズムを適用することができる。今後、この新しいアルゴリズム変形例を、「ファイナル・アルゴリズム」("final algorithm")と称することにする。旧アルゴリズムとの差違は、P(τi)の代わりに、A・P(τi)に関し
【数93】
の近似を求める点のみである。
【0153】
実際の振幅が既知である合成による例の場合、
【数94】
を、実際のA・P(τi)と比較することができる。また、確率密度関数が式(1.14)を満足するので、
【数95】
に従う。
よって、Aの近似は、次式、
【数96】
として得られる。
【0154】
図19、20は、ファイナル・アルゴリズムを用いて、それぞれ、J=50、100、tol=0.01として、図16、17、18と同じE’からP(τ)を再構築した例を示す図である。実際の振幅の値は、A=100である。
【0155】
先に説明したことだが、ここでの目的は、P(v)もしくは、等価的に、P(τ)の良好な近似を、その形式について何ら仮定を置かずに、求めることである。上記のファイナル・アルゴリズムによって求めた、幾つかの確率密度分布の再構築例を、以下に示す。これらは、全て10%ホワイト・ノイズを含んでいる。
【0156】
図21は、平均μ=12.5、分散σ2=11のガウシアンP(v)、即ち、平均A・P(v)、P(v)はガウシアン、J=50、tol=0.01、の、再構築を示す図である。
【0157】
図22は、A・P(v)の再構築を示す図である。P(v)は、ガウシアン、J=100、tol=0.01である。
【0158】
図23は、台形状P(v)の再構築を示す図である。つまり、A・P(v)の再構築であり、P(v)は、台形、J=50、tol=0.01である。
【0159】
図24は、A・P(v)の再構築を示す図である。P(v)は、台形、J=100、tol=0.01である。
【0160】
図25は、次式、
【数97】
で定義されるレイリー(Rayleigh)のP(v)の再構築を示す図である。ここで、b=6である。つまり、A・P(v)の再構築であり、P(v)は、レイリー、J=50、tol=0.01である。
【0161】
図26は、A・P(v)の再構築を示す図である。P(v)は、レイリー、J=100、tol=0.01である。
【0162】
図27は、次式、
【数98】
で定義される複峰性のP(v)の再構築を示す図である。ここで、
【数99】
である。
【0163】
この図27は、A・P(v)の再構築を示す図であり、P(v)は、複峰性、J=50、tol=0.01である。
【0164】
図28は、A・P(v)の再構築を示す図である。P(v)は、複峰性、J=100、tol=0.01である。
【0165】
図27における再構築は、図28に示すものほど良好ではない。実際観測したことだが、確率密度分布の場合は、対数正規分布やガウス分布よりもさらに複雑であり、J=50における本アルゴリズムの性能は、停止基準のためにより小さな許容値、例えば、tol=0.001とすることで、改善可能である。
【0166】
図29は、A・P(v)の再構築を示す図である。P(v)は、複峰性、N=50、tol=0.001である。
【0167】
図30は、次式、
【数100】
で定義される複峰性のP(τ)の再構築を示す図である。ここで、
【数101】
である。
【0168】
また、図30は、A・P(τ)の再構築を示す図である。P(τ)は、複峰性、J=50、tol=0.01である。
【0169】
図31は、A・P(τ)の再構築を示す図である。P(τ)は、複峰性、J=100、tol=0.01である。
【0170】
図30に示す例においては、先の例と同様に、J=50での本アルゴリズムは、複峰性分布を精確に再構築していないことがわかる。本アルゴリズムの性能は、A・P(τ)の再構築であってP(τ)が複峰性でありJ=50、tol=0.001である図32に示すような、停止基準に対するより小さな許容値を用いることで改善される。
【0171】
この場合、小さな許容値を用いることは、J=50での本アルゴリズムを改善させるうえで非常に有用である。しかし、一般的には、組織は非常に繊細であって、tol=0.001を用いれば、単純な分布の場合には精度が損なわれるおそれがある。この場合、tol=0.01で完璧な再構築が行われる。例えば、図25は、J=50、tol=0.01を用いて得られたレイリー分布の非常に良好な再構築を示す。図33は、J=50、tol=0.001を用いて得た、同一のE’からの同一のレイリー分布の再構築を示す。
【0172】
J=50での本アルゴリズムの例とは異なり、J=100を用いれば、許容値tol=0.001は、あらゆる種類の分布に対して小さすぎる。実際、複峰性分布に対する再構築の精度の劣化も観測されている。例えば、図30ないし32に示す複峰性に対し、J=100およびtol=0.001を用いた再構築を図34に示す。この図は、A・P(τ)の再構築であり、P(τ)は、複峰性であり、J=100、tol=0.001である。
【0173】
このように、あらゆる種類の分布に対し、その形式に関する情報を一切仮定せずにP(v)または、等価的には、P(τ)の良好な近似を求めるという目的は、達成された。したがって、関心領域における異常性の有無について、健常な組織を特徴付けている対数正規分布と、再構築した例とを比較することで、判断することが可能である。
【0174】
上述のファイナル・アルゴリズムのおかげで、10%のホワイト・ノイズを含む合成データの場合では、良好な結果を得た。
【0175】
この新しい方法により、特に、単純に、求めた再構築例と健常な組織を特徴付けている速度分布とを比較することで、生理学的な異常性を検出することができる。この新しい方法により、補充信号を微分する必要性がない。この新しい方法は、特に、かなりの大きさのノイズを含んだデータであっても良好な結果を得ることができる。
【0176】
<修正例>
本方法およびシステムでは、上述の実施形態に関し多くの修正例がある。これらの修正例は、上述した以外の、数多くの潅流に関する値もしくは属性を決定するのに用いることができる。
【0177】
さらに、上述の、曲線フィッティングとニューラル・ネットワークの学習を行う、複数のステップからなる解析は、S形状以外の、破壊フレームのシークエンスの後のUCAの注入下で求めた潅流関数を使用してもよい。その一例としては、調査対象の領域に到達した、UCA大量瞬時投与に関する場合である。複数の流れ遷移時間が存在しており、エコー・パワー・ボーラス関数E(t)は、エコー・パワー・関数Ei(t)の総和であると考えることができ、それぞれは、流れ遷移時間τiから決定される。この、基本大量瞬時投与関数Ei(t)は、次式のような形式を備えることができる。
【数102】
【0178】
図35に示す例においては、対数正規分布を有する流れ遷移時間C(τi)を考慮している。ここで、パラメータmおよびsは、それぞれ、0.313および0.4に等しい。この先、それぞれC1_part(τi)ないしC4_part(τi)と称する、遷移時間の4つの下位部分分布(partial sub-distributions)を示す。図36に示すように、この下位部分分布より決定される4つのエコー・パワー関数E1_part(t)ないしE4_part(t)の総和より得る、エコー・パワー関数E(t)を考察するため、本解析法を適用し、対数正規遷移時間分布C(τ)を評価する。
【0179】
本発明により、エコー・パワー関数を解析することで、図37に示すような元(オリジナル)の対数正規分布を評価することができる。
【0180】
<超音波画像化システム>
図38は、本発明にかかる方法で使用可能な、一般的な医療用超音波画像化システムの主要要素を示すブロック図である。中央処理装置1および中央タイミング回路2の制御下、送信ビーム形成器およびパルス形成器3を用い、適当なTx/Rx(送信/受信)マルチプレクサ4を介し、励起信号を、複数の素子を有する超音波プローブ5に与える。伝播媒体内における超音波の反射が生じ、プリ・アンプリファイアおよび予備的タイム−ゲイン補正部6を通してエコー信号を処理する。通例、これら受信信号は、A/D変換器により、アナログ電圧からデジタル値へ変換され、受信ビーム形成器7を通して集中的受信信号(focused receive signals)に統合される。デジタル・フィルタ8(例えば、バンド・パス・フィルタ)を通して処理され、また、その他の信号調整器9(例えば、ポスト・ビーム形成用TGC)を通して処理され、デジタル高周波(無線周波)(rf)信号10は、復調器11で処理され、エコーエンベロープの振幅に比例した信号が生成され、さらにプローブ形状およびビームのスキャン・シークエンスを勘案した非線形的な処理を、スキャン・コンバータ13に書き込む前に行う。スキャン変換信号は、任意で再び(後処理器14で)圧縮し、映像の標準的な信号に変換される。この映像信号は、アナログ形式(この場合、記憶部16は、映像記録設備である。)または、例えばコンピュータ・ファイルのようなデジタル形式(この場合、記憶部16は、ハード・ディスクである。)のいずれかで、映像表示部15に表示し、かつ/または、記憶部16に記憶することができる。このようにして得た画像は、次に、下文に示すようにして本発明により処理される。
【0181】
本発明による方法の実施に際し、このような超音波画像化システムを用いる場合、本発明による再潅流の動力学の分析に用いる信号は、振幅高感度モード(例えば、ハーモニックBモード、パルス・インバージョン、もしくは、パワー・モジュレーション・マルチパルス・モード、または、その他のコーデッド・エキサイテーションもしくはデモジュレーションのシングルパルスもしくはマルチパルス・モードといった)において例えば、微小胞の非線形音響応答性を利用した、造影剤に固有の検出スキームで求めるのが好ましい。あるいは、再潅流の動力学の解析に用いる信号は、(例えば、ハーモニック・パワー・ドップラー、デコリレーション・イメージング、もしくはその他の、微小胞の位置もしくは音響応答性の変化により連続した励起パルスの反応で生じる応答の変化を利用したモードといった)ドップラー・モードでの造影剤に固有の検出スキームで求めてもよい。
【0182】
<流速評価のためのシステム/方法>
図39は、本発明による、パラメータによる流れ画像化の一例における流れ評価方法を実施するためのシステムの主要な機能的要素を示すブロック図である。破壊後のUCAの再潅流が含まれたBモード画像のシークエンスが記録されたコンピュータ・ファイル21(例えば、図38のデジタル・ファイル・記憶部16)から出発し、画像値には、使用した超音波設備に特有の対数圧縮もしくはその他の非線形的ゲイン・データ23に基づいて、適当な線形化22処理が施され、局所的UCA濃度に比例したデータが生成される。時系列データは、本発明による最適フィット方法24により調整され、上述した、予想される潅流則を記述したパラメータ方程式に対し、適合される。これらパラメータの物理的解釈25には、例えばTx/Rxビーム感度データ、および、気泡破壊区域厚さDといった、超音波設備からの入力データ26が必要である。最適フィット・パラメータによって、平均流速データ、平均遷移時間分布評価、もしくは、その他の流れの特性の計算が可能となり、これらは、スキャン・コンバージョン・メモリ27において周知のグレースケールもしくは疑カラー・コーディングでマッピングされ、さらに、任意的に、Bモードもしくは二次元ドップラー・データと重ね合わされ、映像表示部28に表示され、または、デジタルもしくはアナログ形式で記憶される(図示せず)。
【0183】
本発明のよるシステムの機能的要素は、コンピュータにロードすることで、自動的もしくは手動的制御下で再潅流における局所的な物質濃度に比例した信号と、対応するS形状特性を有する時間の関数とを関係付けするように動作するプログラムとして記憶させることが可能である。使用する数学的関数は、例えば、Matlabのカーブ・フィッティング・ツールボックス(Curve Fitting Toolbox)を用いて実現することが可能である。このプログラムは、さらに、記録したエコー信号の振幅を処理し、信号を微小胞の局所的濃度と比例するようにする手段を備えることが好ましく、この手段は、システムのコンピュータにロードされ、自動的もしくは手動的制御下で、処理された信号をS形状パラメータ関数に適合もしくは関連付けする前に、先述の振幅の処理を実行する。また、本プログラムは、自動的もしくは手動的制御下で、S形状特性を有する関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流の値もしくは属性の少なくとも1つとを対応付けするための手段を有することが好ましい。このフィッティングは、例えば、先述の信頼領域法を用いて計算することができる。これらの主要な機能性は両方とも、自動的もしくは半自動的に、使用者による制御を可能にする適切なユーザ・インターフェースを備えて、実現することが可能である。
【0184】
選択した関心領域内における組織の潅流の評価は、研究を実行中の使用者、または、本システムのプログラムに組み込まれた自動境界描写もしくはその他の解剖学的な器官の形態に基づき、自動化手段が決定可能である。二次元的映像要素、もしくは、ピクセルについて個別的に潅流値が評価されれば、これらの値を、パラメータ画像として観察モニタに表示可能である。この場合、ピクセルのグレースケール輝度もしくは演色(カラー・レンダリング)は、局所的に評価されたパラメータ個々の値もしくはそれらの組み合わせに基づいてコード化される。さらに、本システムのプログラムは、二次元的映像要素群(グループ)、もしくは、複数ピクセルについて潅流値を評価可能である。この群(グループ)は、群に含まれるピクセルに対して得られたパラメータが実質的に1つの値を有するように、局所的な画像解像度に基づいて決定される。通例、潅流値をピクセルの群(グループ)内で評価すれば、これらの群(グループ)は、超音波機器の局所的スペックル・パターンから、実質的には(自動的に)決定可能である。ピクセルの群(グループ)の大きさは、局所的な超音波検査画像の二次元空間フーリエ解析から求めることができ、その大きさは、局所的に存在する最大の有意な空間周波数に逆比例する。これらは全て、システムのプログラムにより自動的に、または、使用者の制御下で計算される。本プログラムは、最後の破壊用超音波パルスと、S形状関数が、破壊用超音波パルスを適用する直前の濃度値の2分の1の物質(造影剤)濃度に等しい振幅に達した瞬間との間の時間経過から、流れパラメータを評価可能である。
【0185】
また、本システムのプログラムは、平均局所的血流速度を計算することもできる。これは、微小胞が破壊されたスライスの厚さの半分(one-half the thickness of the slice)を、最大濃度の半分に到達する時間で割った比で表わされる。このために、本プログラムは、画像化面に垂直な方向における、微小胞が破壊されるスライスの厚さの近似値を、送信ビームの高さ方向の幅から求めることができる。
【0186】
本システムのプログラムは、破壊パルス後、長時間を経た時間値に対し、S形状関数の漸近値として、定常状態物質(造影剤)濃度レベルを計算することができる。また、この濃度レベルは、破壊パルスの直前での値から採ることもできる。
【0187】
本システムのプログラムは、S形状関数を、上記にて詳述したように、累積正規確率分布関数、シグモイド関数、累積正規確率分布関数の多項式近似、多項形式による限定的展開を含んだパラメータ式、または、累積対数正規確率分布関数によるパラメータ式、として計算可能である。ある実施形態においては、本システムのプログラムは、S形状関数を、累積正規確率分布関数の総和(サム)もしくは積分(インテグラル)によるパラメータ式として計算する。この累積正規確率分布関数は、流速もしくは遷移時間の対数正規確率分布で重み付けされ、またその最適フィット・パラメータ値は、平均(ミーン)、分散(バリアンス)、および、歪度(スキューネス)と同様、器官における潅流の物理的な量を表わしている。
【0188】
流速値を、再潅流関数の、平滑化した、もしくは、フィルタをかけた変形関数を用いて評価し、定常状態のエコー・パワー振幅の半値に到達するための時間を評価可能である。
【0189】
局所的濃度に比例した信号を、パラメータ・フィッティング関数を用いて適合化させる前にローパス・フィルタもしくはその他の平滑化関数で処理することは有利である。線形化を行う代わりに、局所的濃度に比例した信号を、超音波検査機器において適用されたものと同一の性質を有する非線形関数で修正したパラメータ・フィッティング関数に適合化させることも可能である。
【0190】
先に図9aないしdを参照して詳述したように、エコー・パワー・データを、ウェーブレットで分解する方法により解析し、異なる流れ遷移時間もしくは速度における寄与の分布を評価可能である。このために、局所的濃度に比例した信号は、ウェーブレットで分解する方法で解析する前に、先ず、ローパス・フィルタもしくは平滑化をかけることが好ましい。これにより、ウェーブレットで分解する方法で解析する前に2回、微分可能となる。ウェーブレットの手法においては、分解に用いるマザー・ウェーブレットは、例えば、単一の流れ値に対する再潅流関数を記述するのに用いた累積正規分布関数の2次時間導関数である。
【0191】
さらに、もしくは、あるいは、エコー・パワー・データを、1つのステップもしくは複数のステップからなる処理過程を用いて解析し、異なる流れ遷移時間もしくは速度における寄与の分布を評価する。第1のステップにおいては、流れ遷移時間もしくは速度の第1のセットを選択し、複数のS形状関数の線形結合と、エコー・パワー・データとの最適フィットを行って第1の評価を求める。そして、第1の評価を第2のセットを決定する基準として用い、流れ遷移時間もしくは速度の第2のセットに対して第2の評価が行われる。そして次に、第2の評価を用いて第3の評価を行うための、初期値のセットを決定する。
【0192】
例えば、第2の評価は、3次のスプライン補外を用いて行うことができる。また、第3の評価は、ニューラル・ネットワーク解析を用いて行うのが有利である。この場合、ニューラル・ネットワークのバイアス値および負の重みは、定期的に(例えば、適合化における50ないし100回のイタレーション毎に)ゼロにリセットすることが好ましい。第1の評価は、比較的少数のS形状関数、通常は高々16、好ましくは高々8つのS形状関数を用いて行うことができる。第2の評価は、さらに多くの数の流れ遷移時間もしくは速度、例えば、少なくとも8つ、好ましくは16の流れ遷移時間もしくは速度のセットを用いて行うことができる。
【0193】
また、局所的濃度に比例した信号を、高周波(無線周波数)エコー信号(つまり、図38における10)から、例えば復調エコー信号をスクエアリング(squaring)することで導出可能である。あるいは、対数圧縮した後の映像エコー信号へ、対数圧縮の逆の効果を与える逆対数圧縮を施して、それより局所的濃度に比例した信号を導出し、これらの信号をスクエアリング(squaring)する。ある実施形態においては、局所的濃度に比例した信号は、振幅高感度モード(例えば、ハーモニックBモード、パルス・インバージョン、もしくは、パワー・モジュレーション・マルチパルス・モード、または、その他のコーデッド・エキサイテーションもしくはデモジュレーションのシングルパルス、もしくは、マルチパルス・モードといった)における微小胞の非線形音響応答性を利用した、造影剤に固有の検出スキームにより求める。
【0194】
本システムのプログラムは、1つもしくは複数の、画像化システムのコンピュータにロード可能な、1つもしくは複数のモジュールで提供可能である。これにより、使用者の制御下に於いて、自動的もしくは半自動的な本発明の方法の実施が可能である。本願に記載の処理ステップを実行するための数学的関数を全て、自動化することができる。
【0195】
本プログラムは、一般に、CD−ROM、DVD、または、その他のコンピュータ読取り可能な媒体を介して提供される。あるいは、本プログラムを、ハード・ディスクにプリ・ロード(事前搭載)、ネットワークを通じてコンピュータに送信、もしくは、放送により提供してもよい。さらに一般的には、コンピュータのワーキング・メモリへ直接的にロードするあらゆる形態により提供される。しかしながら、本発明による方法は、ハードウェア的構造体(例えば、半導体材料のチップへの集積)、もしくは、ソフトウェアおよびハードウェアの協働により実行することができる。
【0196】
さらに、上記の本プログラムは、既存の超音波画像化システムにおいて使用することを目的としたスタンドアロンの製品として市場に供することにも適する。例えば、本プログラムを、システムに組み込まれたコンピュータ、または、別個のスキャナより供されるエコー信号のシークエンスを(例えば、リムーバブル・ディスク、通信線、無線接続を通じて)受信する外部コンピュータ上で使用することができる。
【実施例1】
【0197】
<例>
本願開示の発明の、インビボ適用可能性を示すため、膨張性動脈内バルーンを用いてミニブタの腎臓に人工的閉塞(狭窄)を作成した。造影剤には、SonoVue(登録商標)(ブラッコ・イメージング(Bracco Imaging S.p.A.))を用い、静脈内へ、1mL毎分の一定の注入速度で投与した。超音波画像化設備には、パルス・インバージョン・コントラスト−スペシフィックBモード画像化でC5−2コンベックス・プローブを用いたSTL/Philips(ワシントン州、ボセル(Bothell, WA))のHDI−5000を用いた。UCA破壊/補充画像のシークエンスが、記録され、コンピュータに送信され、再潅流分析に供された。グレースケール・リニアライゼーションが可能なビデオ・デンシトメトリ・プログラムを用い、腎皮質に2つの関心領域を設定した。第1の領域、AOI−1は、正常に潅流している腎皮質内に設定し、それに対し、もう一つの領域、AOI−2は、皮質の低潅流領域に設定した。気泡は下位フレームを適用してからの10秒間におけるAOI−1およびAOI−2に対する、線形化したビデオ・デンシトメトリのデータ・ポイントをそれぞれ、図40aおよび図40bに示す。それぞれのグラフにおいて、最適フィットのlogperfエネルギ関数、E(t)を実線で示す。これら2つのAOIに対する、最も適当な最適フィット・パラメータはAOI−1およびAOI−2についてそれぞれ、A=59.5、および、A=0.62、τ=1.25sおよびτ=3.1sであった。これら2つの領域では、D値は6mmおよび8mmであって、横方向流速vyはそれぞれ、2.4mm/sおよび0.97mm/sである。相対流量は、Aとvyの積で求まり、よって、AOI−1およびAOI−2ではそれぞれ、142.8および0.6なる値である。これより、これら2つの皮質領間では、非常に大きな流れの違いがあることが示唆されている。
【0198】
当然のことながら、部分的もしくは特定の要請を満たすために当業者が、本願記載の手法に様々な修正および変更を加えようとも、それらは、クレームの規定する本発明の保護範囲に含まれる。
【図面の簡単な説明】
【0199】
【図1a】超音波トランスデューサからの音響ビームの投射を示す図である。
【図1b】高さ方向に関する超音波画像化機器のビーム感度分布のグラフの典型例である。
【図2】破壊の生じた区域における再潅流の、造影剤の信号パワーのS形状関数を示すグラフである。本発明による方法では、このようなS形状関数を用いる。
【図3a】本発明のある実施形態よる、インビトロ設定における実験記録を累積対数正規分布関数でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図3b】本発明のある実施形態よる、インビトロ設定における実験記録を累積対数正規分布関数でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図4a】従来技術による単一指数関数フィットと、それに対応する本発明の方法による評価を用いた流速評価のグラフである。
【図4b】従来技術による単一指数関数フィットと、それに対応する本発明の方法による評価を用いた流速評価のグラフである。
【図5a】2つの流れ遷移時間の対数正規確率分布関数のグラフである。
【図5b】2つの流れ遷移時間の対数正規確率分布関数のグラフである。
【図6a】図5aおよび図5bに示すような流れの分布で生じるS形状エコー・パワー再潅流関数のグラフである。本発明の別の実施形態において有用である。
【図6b】図5aおよび図5bに示すような流れの分布で生じるS形状エコー・パワー再潅流関数のグラフである。本発明の別の実施形態において有用である。
【図7a】本発明のさらに別の実施形態による、インビトロ設定における実験記録を、遷移時間のS形状対数正規分布による再潅流関数の総和(サム)(sum)でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図7b】本発明のさらに別の実施形態による、インビトロ設定における実験記録を、遷移時間のS形状対数正規分布による再潅流関数の総和(サム)(sum)でフィットした、破壊後の、エコー・パワー関数のグラフである。
【図8】図7に示すデータに対する最適フィットとして求まる対数正規遷移時間分布のグラフである。
【図9a】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図9b】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図9c】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図9d】他の実施形態における、再潅流関数のウェーブレットによる分解の過程を示すグラフである。個々の流れの寄与毎の分布で表わしている。
【図10】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図11】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図12】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図13】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図14】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、1つのステップからなる処理または複数のステップからなる処理の第1のステップである。
【図15】ニューラル・ネットワークを示す図である。
【図16】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図17】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図18】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図19】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図20】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図21】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図22】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図23】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図24】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図25】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図26】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図27】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図28】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図29】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図30】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図31】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図32】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図33】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図34】エコー・パワー・データを分析して異なる流れ遷移時間または速度における寄与の分布を評価する分析のグラフである。これは、複数のステップからなる処理の後続のステップである。
【図35】上述した1つのステップまたは複数のステップからなる処理の別の用途を示す図である。
【図36】上述した1つのステップまたは複数のステップからなる処理の別の用途を示す図である。
【図37】上述した1つのステップまたは複数のステップからなる処理の別の用途を示す図である。
【図38】一般的な医療用超音波画像化システムの主要要素を示すブロック図である。
【図39】本発明による、パラメータによる流れの画像化の一例における流れ評価方法/システムの主要な機能的要素を示す図である。
【図40a】2つの関心領域に対する補充関数の実験結果を示す。腎皮質の正常な潅流の領域である。
【図40b】2つの関心領域に対する補充関数の実験結果を示す。腎皮質の低潅流の領域である。
【符号の説明】
【0200】
1 : 中央処理装置
2 : システム・タイミング
3 : Txビーム形成器およびパルス形成器
4 : Tx/Rxマルチプレクサ
5 : 超音波プローブ
6 : RxTGCおよびプリアンプ
7 : RxA/Dコンバータおよびビーム形成器
8 : デジタル・フィルタ
9 : その他の信号調整器
10 : デジタルrfエコー信号
11 : デジタル復調器
12 : 対数圧縮前処理部
13 : スキャン・コンバータ
14 : オプションの後処理用圧縮器
15 : 映像表示部
16 : 画像記憶部
【特許請求の範囲】
【請求項1】
生きている被験対象の組織における潅流の非侵襲的定量方法であって、
前記組織における画像化用造影剤の補充を示唆するエコー信号のシークエンスを供するステップと、
前記エコー信号と、パラメータを備えた時間に関するS形状関数とを関連付けるステップであって、前記S形状関数は、実質的に一定な初期値を有する初期部、実質的に一定な最終値を有する最終部、および、前記初期部と前記最終部との間にあって前記S形状関数が前記初期値から前記最終値へと単調に変化する中央部とを含んでいる、ステップと、
前記S形状関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流値もしくは属性とを対応付けるステップとを有する方法。
【請求項2】
前記造影剤は、微小胞を有し、
前記微小胞は、音響エネルギを反射することができ、
前記エコー信号のシークエンスは、
前記造影剤を前記生きている被験対象に投与するステップ、
超音波画像化装置の画像化面に超音波パルスを、前記画像化面に存在する前記微小胞の大部分を破壊するのに十分な大きさの音圧で与えるステップ、
前記画像化面に別の超音波パルスのシークエンスを、前記微小胞の大部分を維持するのに十分な小ささの音圧で与えるステップ、および、
所定の時間間隔の後で前記別の超音波パルスのシークエンスを与えるステップを繰り返し、前記別の超音波パルスによって前記面からもたらされた前記エコー信号を記録して前記時間間隔における前記画像化面での前記微小胞の補充をモニタするステップによって獲得される請求項1に記載の方法。
【請求項3】
前記S形状関数を関連付けるステップの前に、
前記エコー信号を処理して微小胞の局所的濃度に比例したエコー信号を作成するステップであって、作成された処理されたエコー信号は、前記画像化面内の位置における造影剤の濃度に比例している、ステップを有する請求項1または2に記載の方法。
【請求項4】
前記エコー信号は、前記エコー信号の振幅に比例した画像要素と関連付けられた2次元画像として獲得され、
前記処理は、前記エコー信号の線形化処理を含む請求項3に記載の方法。
【請求項5】
前記エコー信号は、超音波エコーの振幅に比例した振幅を有し、
前記処理は、前記エコー信号の線形化処理を含む請求項3に記載の方法。
【請求項6】
前記エコー信号は、高周波信号、または、復調高周波信号である請求項5に記載の方法。
【請求項7】
前記組織潅流値もしくは属性を、選択された関心領域内で評価する請求項1ないし6のいずれか1つに記載の方法。
【請求項8】
前記潅流値もしくは属性は、個々の2次元画像要素を用いて評価され、
ピクセルのグレースケール輝度もしくはカラー・レンダリングによるパラメータ画像形式で観察モニタに表示され、
ここで、前記ピクセルのグレースケール輝度もしくはカラー・レンダリングは、個々の局所的に評価されたパラメータ値もしくはそれらの組み合わせに基づいてコード化される請求項1ないし7のいずれか1つに記載の方法。
【請求項9】
前記潅流値もしくは属性は、2次元画像要素群を用いて評価され、
前記群は、各画像要素群から各パラメータに関して実質的に1つの値が得られるように局所的画像解像度により決定される請求項1ないし8のいずれか1つに記載の方法。
【請求項10】
前記潅流値もしくは属性は、画像要素群を用いて評価され、
前記画像要素群は、前記超音波画像化装置の超音波検査機器の局所的スペックル・パターンによって実質的に求まるサイズを有する請求項1ないし9のいずれか1つに記載の方法。
【請求項11】
前記画像要素群の前記サイズは、局所的超音波検査画像の2次元空間フーリエ解析から決定され、
前記サイズの大きさは、局所的に存在する最大有意空間周波数に逆比例する請求項10に記載の方法。
【請求項12】
前記対応付けは、平均遷移時間、平均速度、平均流量、および、潅流量のうちから選択される潅流値の少なくとも1つを用いて行われる請求項1ないし11のいずれか1つに記載の方法。
【請求項13】
前記対応付けは、血流パターン、流れ分布の分散、および、流れの歪度のうちから選択される潅流属性の少なくとも1つを用いて行われる請求項1ないし12のいずれか1つに記載の方法。
【請求項14】
前記潅流値もしくは属性は、前記超音波パルスと、前記S形状関数が前記超音波パルスの適用の直前における前記造影剤の濃度の2分の1の前記造影剤の濃度と等価な値に達した瞬間との間の時間経過より評価される請求項1ないし13のいずれか1つに記載の方法。
【請求項15】
前記潅流値もしくは属性は、前記超音波パルスと、前記S形状関数が前記超音波パルスの適用の直前における前記造影剤の濃度の2分の1の前記造影剤の濃度と等価な値に達した瞬間との間の時間経過より評価され、
前記潅流値は、平均局所的血流速度であり、
前記平均局所的血流速度は、微小胞が破壊されたスライスの厚さの2分の1と、最大濃度の半分に到達する時間との比として表わされる請求項2に記載の方法。
【請求項16】
前記微小胞が破壊された前記スライスの厚さは、前記適用された超音波パルスの前記画像化面に垂直な方向における幅の値から近似的に求める請求項15に記載の方法。
【請求項17】
前記超音波造影剤は、静脈に連続的に注入することができる請求項1ないし16のいずれか1つに記載の方法。
【請求項18】
前記超音波造影剤は、局所的造影剤濃度が、前記超音波パルスの適用の直前の前記濃度の少なくとも2分の1に達するまで、数秒間、前記画像化領域に関し原則として一定値の局所的造影剤濃度で供されるように、静脈へ大量瞬時投与される請求項1ないし16のいずれか1つに記載の方法。
【請求項19】
前記S形状関数は、累積正規確率分布関数、シグモイド関数、または、累積正規確率分布関数の多項式近似である請求項1ないし18のいずれかに記載の方法。
【請求項20】
前記S形状関数は、多項式形式による限定的展開を含むパラメータ式、もしくは、累積対数正規確率分布関数のパラメータ式である請求項19に記載の方法。
【請求項21】
前記S形状関数は、流速もしくは遷移時間の対数正規確率分布により重み付けられた累積正規確率分布関数の総和もしくは積分を含むパラメータ式であり、
前記S形状関数は、組織潅流に関する物理量を表わす最適フィット・パラメータ値を有する請求項19に記載の方法。
【請求項22】
前記エコー信号は、前記S形状関数に関連付けされる前に、平滑化関数を用いた処理を施される請求項1ないし21のいずれか1つに記載の方法。
【請求項23】
前記エコー信号は、ウェーブレットで分解する手法で解析され、異なる流れ遷移時間もしくは速度における寄与の分布が評価される請求項1ないし22のいずれか1つに記載の方法。
【請求項24】
前記局所的濃度に比例したエコー信号は、前記ウェーブレットで分解する手法で解析される前に、2回、微分される請求項23に記載の方法。
【請求項25】
前記分解に用いるマザー・ウェーブレットは、単一の流れ値に対するS形状関数を記述するために用いた累積正規分布関数の2次時間導関数である請求項24に記載の方法。
【請求項26】
前記エコー信号を解析して異なる流れ遷移時間もしくは速度における寄与の分布を評価し、
前記解析は、
流れ遷移時間もしくは速度の第1セットを選択するステップ、および、
複数のS形状関数の線形結合で前記エコー信号を最適フィットして第1評価を求めるステップを有する請求項1ないし21のいずれか1つに記載の方法。
【請求項27】
流れ遷移時間もしくは速度の前記第1セットは、4ないし16個のS形状関数の線形結合より求められる請求項26に記載の方法。
【請求項28】
前記解析はさらに、
前記第1評価を前記第2セットを決定するための基準として用いて流れ遷移時間もしくは速度の第2セットを定める第2評価を行うステップを有する請求項26または27に記載の方法。
【請求項29】
流れ遷移時間もしくは速度の前記第2セットは、8ないし64個のS形状関数の線形結合より求められる請求項28に記載の方法。
【請求項30】
前記第2評価を用いて、第3評価を行うための初期値セットを求める請求項28または29に記載の方法。
【請求項31】
前記第2評価は、3次スプライン補外を用いて行われる請求項28ないし30のいずれか1つに記載の方法。
【請求項32】
前記第3評価は、ニューラル・ネットワーク解析を用いて行われる請求項28ないし31のいずれか1つに記載の方法。
【請求項33】
前記ニューラル・ネットワークは、前記流れ遷移時間もしくは速度に対する複数の重み、ならびに、前記重み付けされた流れ遷移時間もしくは速度に対するバイアス値で定められ、
前記第3評価は、
前記バイアス値および前記重みを反復的に調整するステップと、
前記バイアス値および負の重みをゼロに定期的にリセットするステップとを有する請求項32に記載の方法。
【請求項34】
前記リセットするステップは、10ないし200回のイタレーション回数に等しい周期で行われる請求項33に記載の方法。
【請求項35】
前記第1評価は、高々8個のS形状関数を用いて行われる請求項26ないし34のいずれか1つに記載の方法。
【請求項36】
前記第2評価は、少なくとも16個の流れ遷移時間もしくは速度を含むセットを用いて行われる請求項35に記載の方法。
【請求項37】
請求項1ないし36のいずれか1つの方法を実行するデータ処理システムのワーキング・メモリに直接的にロードできるプログラム・コードを備えたコンピュータ・プログラムであって、
前記プログラムを前記システムにおいて実行することにより請求項1ないし36のいずれか1つの方法が実行されるコンピュータ・プログラム。
【請求項38】
請求項37に記載のプログラムを実装したコンピュータ読取り可能媒体を有するプログラム製品。
【請求項39】
生きている被験対象の組織における潅流の非侵襲的定量システムであって、
前記組織における画像化用造影剤の補充を示唆するエコー信号のシークエンスを供する手段と、
前記エコー信号と、パラメータを備えた時間に関するS形状関数とを関連付ける手段であって、前記S形状関数は、実質的に一定な初期値を有する初期部、実質的に一定な最終値を有する最終部、および、前記初期部と前記最終部との間にあって前記S形状関数が前記初期値から前記最終値へと単調に変化する中央部とを含んでいる、手段と、
前記S形状関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流値もしくは属性とを対応付ける手段とを有するシステム。
【請求項40】
前記造影剤は、微小胞を有し、
前記微小胞は、音響エネルギを反射することができ、
前記エコー信号のシークエンスを供する手段は、
超音波画像化装置の画像化面に超音波パルスを、前記画像化面に存在する前記微小胞の大部分を破壊するのに十分な大きさの音圧で与える手段、
前記画像化面に別の超音波パルスのシークエンスを、前記微小胞の大部分を維持するのに十分な小ささの音圧で与える手段、および、
所定の時間間隔の後で前記別の超音波パルスを与え、前記画像化面からもたらされた前記エコー信号を記録して前記所定の時間間隔の後における前記画像化面での前記微小胞の補充をモニタする手段を有する請求項39に記載のシステム。
【請求項41】
さらに、前記S形状関数を関連付ける前に、前記エコー信号を処理して微小胞の局所的濃度に比例したエコー信号を作成する手段を備え、
処理された前記エコー信号は、前記画像化面内の位置における造影剤の濃度に比例している請求項39または40に記載のシステム。
【請求項42】
請求項39ないし41のいずれか1つに記載のシステムで用いる装置であって、
前記エコー信号を入力する手段と、
前記エコー信号と、パラメータを備えた時間に関するS形状関数とを関連付ける前記手段と、
前記対応付けるための前記手段とを有する装置。
【請求項1】
生きている被験対象の組織における潅流の非侵襲的定量方法であって、
前記組織における画像化用造影剤の補充を示唆するエコー信号のシークエンスを供するステップと、
前記エコー信号と、パラメータを備えた時間に関するS形状関数とを関連付けるステップであって、前記S形状関数は、実質的に一定な初期値を有する初期部、実質的に一定な最終値を有する最終部、および、前記初期部と前記最終部との間にあって前記S形状関数が前記初期値から前記最終値へと単調に変化する中央部とを含んでいる、ステップと、
前記S形状関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流値もしくは属性とを対応付けるステップとを有する方法。
【請求項2】
前記造影剤は、微小胞を有し、
前記微小胞は、音響エネルギを反射することができ、
前記エコー信号のシークエンスは、
前記造影剤を前記生きている被験対象に投与するステップ、
超音波画像化装置の画像化面に超音波パルスを、前記画像化面に存在する前記微小胞の大部分を破壊するのに十分な大きさの音圧で与えるステップ、
前記画像化面に別の超音波パルスのシークエンスを、前記微小胞の大部分を維持するのに十分な小ささの音圧で与えるステップ、および、
所定の時間間隔の後で前記別の超音波パルスのシークエンスを与えるステップを繰り返し、前記別の超音波パルスによって前記面からもたらされた前記エコー信号を記録して前記時間間隔における前記画像化面での前記微小胞の補充をモニタするステップによって獲得される請求項1に記載の方法。
【請求項3】
前記S形状関数を関連付けるステップの前に、
前記エコー信号を処理して微小胞の局所的濃度に比例したエコー信号を作成するステップであって、作成された処理されたエコー信号は、前記画像化面内の位置における造影剤の濃度に比例している、ステップを有する請求項1または2に記載の方法。
【請求項4】
前記エコー信号は、前記エコー信号の振幅に比例した画像要素と関連付けられた2次元画像として獲得され、
前記処理は、前記エコー信号の線形化処理を含む請求項3に記載の方法。
【請求項5】
前記エコー信号は、超音波エコーの振幅に比例した振幅を有し、
前記処理は、前記エコー信号の線形化処理を含む請求項3に記載の方法。
【請求項6】
前記エコー信号は、高周波信号、または、復調高周波信号である請求項5に記載の方法。
【請求項7】
前記組織潅流値もしくは属性を、選択された関心領域内で評価する請求項1ないし6のいずれか1つに記載の方法。
【請求項8】
前記潅流値もしくは属性は、個々の2次元画像要素を用いて評価され、
ピクセルのグレースケール輝度もしくはカラー・レンダリングによるパラメータ画像形式で観察モニタに表示され、
ここで、前記ピクセルのグレースケール輝度もしくはカラー・レンダリングは、個々の局所的に評価されたパラメータ値もしくはそれらの組み合わせに基づいてコード化される請求項1ないし7のいずれか1つに記載の方法。
【請求項9】
前記潅流値もしくは属性は、2次元画像要素群を用いて評価され、
前記群は、各画像要素群から各パラメータに関して実質的に1つの値が得られるように局所的画像解像度により決定される請求項1ないし8のいずれか1つに記載の方法。
【請求項10】
前記潅流値もしくは属性は、画像要素群を用いて評価され、
前記画像要素群は、前記超音波画像化装置の超音波検査機器の局所的スペックル・パターンによって実質的に求まるサイズを有する請求項1ないし9のいずれか1つに記載の方法。
【請求項11】
前記画像要素群の前記サイズは、局所的超音波検査画像の2次元空間フーリエ解析から決定され、
前記サイズの大きさは、局所的に存在する最大有意空間周波数に逆比例する請求項10に記載の方法。
【請求項12】
前記対応付けは、平均遷移時間、平均速度、平均流量、および、潅流量のうちから選択される潅流値の少なくとも1つを用いて行われる請求項1ないし11のいずれか1つに記載の方法。
【請求項13】
前記対応付けは、血流パターン、流れ分布の分散、および、流れの歪度のうちから選択される潅流属性の少なくとも1つを用いて行われる請求項1ないし12のいずれか1つに記載の方法。
【請求項14】
前記潅流値もしくは属性は、前記超音波パルスと、前記S形状関数が前記超音波パルスの適用の直前における前記造影剤の濃度の2分の1の前記造影剤の濃度と等価な値に達した瞬間との間の時間経過より評価される請求項1ないし13のいずれか1つに記載の方法。
【請求項15】
前記潅流値もしくは属性は、前記超音波パルスと、前記S形状関数が前記超音波パルスの適用の直前における前記造影剤の濃度の2分の1の前記造影剤の濃度と等価な値に達した瞬間との間の時間経過より評価され、
前記潅流値は、平均局所的血流速度であり、
前記平均局所的血流速度は、微小胞が破壊されたスライスの厚さの2分の1と、最大濃度の半分に到達する時間との比として表わされる請求項2に記載の方法。
【請求項16】
前記微小胞が破壊された前記スライスの厚さは、前記適用された超音波パルスの前記画像化面に垂直な方向における幅の値から近似的に求める請求項15に記載の方法。
【請求項17】
前記超音波造影剤は、静脈に連続的に注入することができる請求項1ないし16のいずれか1つに記載の方法。
【請求項18】
前記超音波造影剤は、局所的造影剤濃度が、前記超音波パルスの適用の直前の前記濃度の少なくとも2分の1に達するまで、数秒間、前記画像化領域に関し原則として一定値の局所的造影剤濃度で供されるように、静脈へ大量瞬時投与される請求項1ないし16のいずれか1つに記載の方法。
【請求項19】
前記S形状関数は、累積正規確率分布関数、シグモイド関数、または、累積正規確率分布関数の多項式近似である請求項1ないし18のいずれかに記載の方法。
【請求項20】
前記S形状関数は、多項式形式による限定的展開を含むパラメータ式、もしくは、累積対数正規確率分布関数のパラメータ式である請求項19に記載の方法。
【請求項21】
前記S形状関数は、流速もしくは遷移時間の対数正規確率分布により重み付けられた累積正規確率分布関数の総和もしくは積分を含むパラメータ式であり、
前記S形状関数は、組織潅流に関する物理量を表わす最適フィット・パラメータ値を有する請求項19に記載の方法。
【請求項22】
前記エコー信号は、前記S形状関数に関連付けされる前に、平滑化関数を用いた処理を施される請求項1ないし21のいずれか1つに記載の方法。
【請求項23】
前記エコー信号は、ウェーブレットで分解する手法で解析され、異なる流れ遷移時間もしくは速度における寄与の分布が評価される請求項1ないし22のいずれか1つに記載の方法。
【請求項24】
前記局所的濃度に比例したエコー信号は、前記ウェーブレットで分解する手法で解析される前に、2回、微分される請求項23に記載の方法。
【請求項25】
前記分解に用いるマザー・ウェーブレットは、単一の流れ値に対するS形状関数を記述するために用いた累積正規分布関数の2次時間導関数である請求項24に記載の方法。
【請求項26】
前記エコー信号を解析して異なる流れ遷移時間もしくは速度における寄与の分布を評価し、
前記解析は、
流れ遷移時間もしくは速度の第1セットを選択するステップ、および、
複数のS形状関数の線形結合で前記エコー信号を最適フィットして第1評価を求めるステップを有する請求項1ないし21のいずれか1つに記載の方法。
【請求項27】
流れ遷移時間もしくは速度の前記第1セットは、4ないし16個のS形状関数の線形結合より求められる請求項26に記載の方法。
【請求項28】
前記解析はさらに、
前記第1評価を前記第2セットを決定するための基準として用いて流れ遷移時間もしくは速度の第2セットを定める第2評価を行うステップを有する請求項26または27に記載の方法。
【請求項29】
流れ遷移時間もしくは速度の前記第2セットは、8ないし64個のS形状関数の線形結合より求められる請求項28に記載の方法。
【請求項30】
前記第2評価を用いて、第3評価を行うための初期値セットを求める請求項28または29に記載の方法。
【請求項31】
前記第2評価は、3次スプライン補外を用いて行われる請求項28ないし30のいずれか1つに記載の方法。
【請求項32】
前記第3評価は、ニューラル・ネットワーク解析を用いて行われる請求項28ないし31のいずれか1つに記載の方法。
【請求項33】
前記ニューラル・ネットワークは、前記流れ遷移時間もしくは速度に対する複数の重み、ならびに、前記重み付けされた流れ遷移時間もしくは速度に対するバイアス値で定められ、
前記第3評価は、
前記バイアス値および前記重みを反復的に調整するステップと、
前記バイアス値および負の重みをゼロに定期的にリセットするステップとを有する請求項32に記載の方法。
【請求項34】
前記リセットするステップは、10ないし200回のイタレーション回数に等しい周期で行われる請求項33に記載の方法。
【請求項35】
前記第1評価は、高々8個のS形状関数を用いて行われる請求項26ないし34のいずれか1つに記載の方法。
【請求項36】
前記第2評価は、少なくとも16個の流れ遷移時間もしくは速度を含むセットを用いて行われる請求項35に記載の方法。
【請求項37】
請求項1ないし36のいずれか1つの方法を実行するデータ処理システムのワーキング・メモリに直接的にロードできるプログラム・コードを備えたコンピュータ・プログラムであって、
前記プログラムを前記システムにおいて実行することにより請求項1ないし36のいずれか1つの方法が実行されるコンピュータ・プログラム。
【請求項38】
請求項37に記載のプログラムを実装したコンピュータ読取り可能媒体を有するプログラム製品。
【請求項39】
生きている被験対象の組織における潅流の非侵襲的定量システムであって、
前記組織における画像化用造影剤の補充を示唆するエコー信号のシークエンスを供する手段と、
前記エコー信号と、パラメータを備えた時間に関するS形状関数とを関連付ける手段であって、前記S形状関数は、実質的に一定な初期値を有する初期部、実質的に一定な最終値を有する最終部、および、前記初期部と前記最終部との間にあって前記S形状関数が前記初期値から前記最終値へと単調に変化する中央部とを含んでいる、手段と、
前記S形状関数の少なくとも1つのパラメータの少なくとも1つの値と、局所的組織潅流値もしくは属性とを対応付ける手段とを有するシステム。
【請求項40】
前記造影剤は、微小胞を有し、
前記微小胞は、音響エネルギを反射することができ、
前記エコー信号のシークエンスを供する手段は、
超音波画像化装置の画像化面に超音波パルスを、前記画像化面に存在する前記微小胞の大部分を破壊するのに十分な大きさの音圧で与える手段、
前記画像化面に別の超音波パルスのシークエンスを、前記微小胞の大部分を維持するのに十分な小ささの音圧で与える手段、および、
所定の時間間隔の後で前記別の超音波パルスを与え、前記画像化面からもたらされた前記エコー信号を記録して前記所定の時間間隔の後における前記画像化面での前記微小胞の補充をモニタする手段を有する請求項39に記載のシステム。
【請求項41】
さらに、前記S形状関数を関連付ける前に、前記エコー信号を処理して微小胞の局所的濃度に比例したエコー信号を作成する手段を備え、
処理された前記エコー信号は、前記画像化面内の位置における造影剤の濃度に比例している請求項39または40に記載のシステム。
【請求項42】
請求項39ないし41のいずれか1つに記載のシステムで用いる装置であって、
前記エコー信号を入力する手段と、
前記エコー信号と、パラメータを備えた時間に関するS形状関数とを関連付ける前記手段と、
前記対応付けるための前記手段とを有する装置。
【図1a】


【図1b】
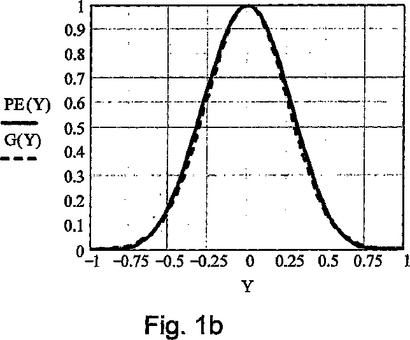
【図2】
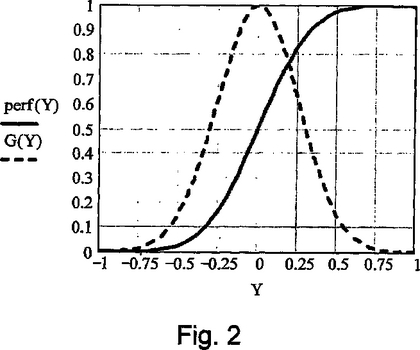
【図3a】
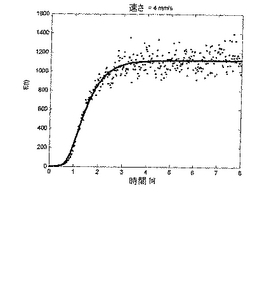
【図3b】

【図4a】

【図4b】

【図5a】
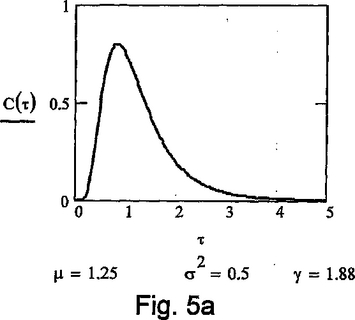
【図5b】

【図6a】
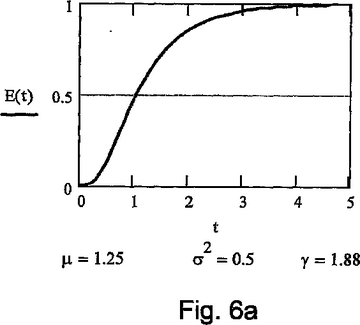
【図6b】

【図7a】

【図7b】
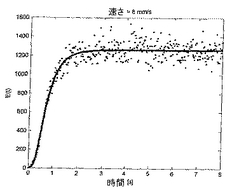
【図8】
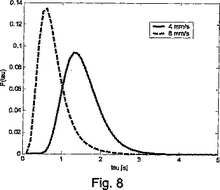
【図9a】
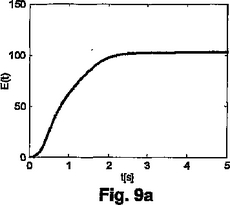
【図9b】
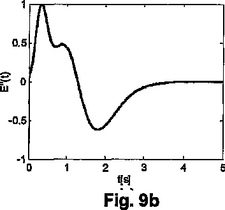
【図9c】
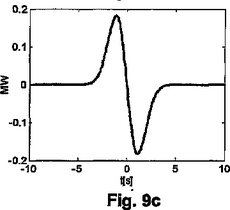
【図9d】

【図10】

【図11】
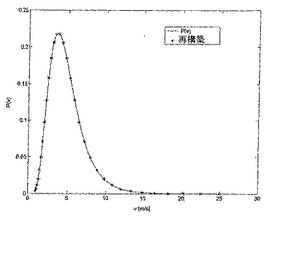
【図12】
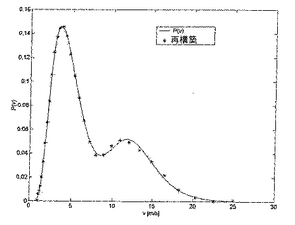
【図13】
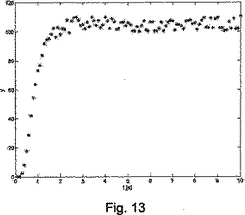
【図14】

【図15】
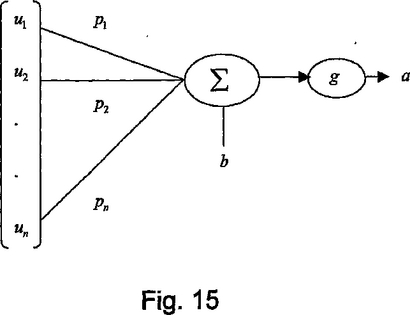
【図16】
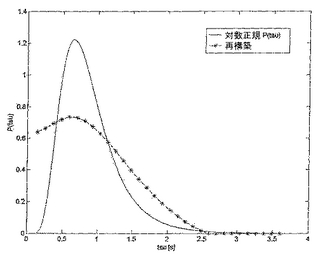
【図17】

【図18】

【図19】
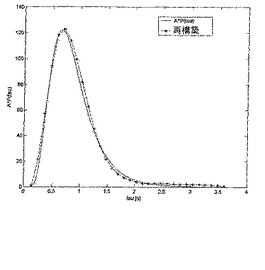
【図20】
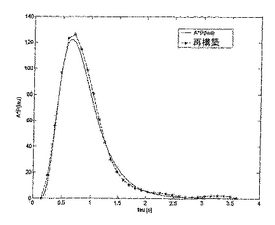
【図21】

【図22】
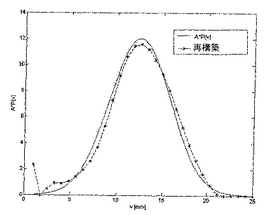
【図23】

【図24】

【図25】

【図26】

【図27】

【図28】
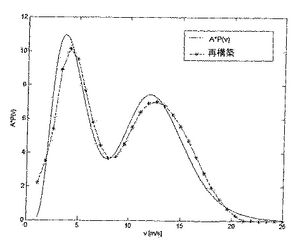
【図29】
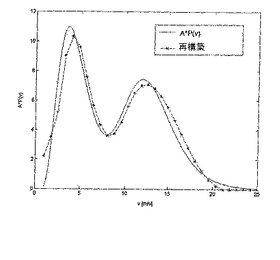
【図30】
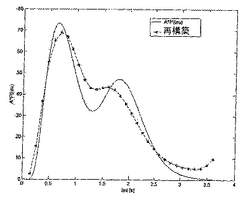
【図31】

【図32】
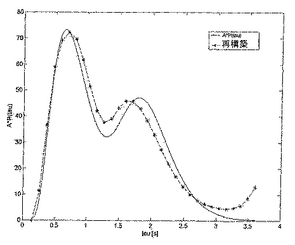
【図33】
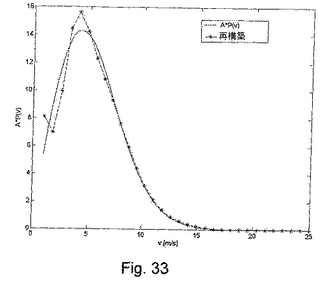
【図34】

【図35】

【図36】

【図37】

【図38】

【図39】
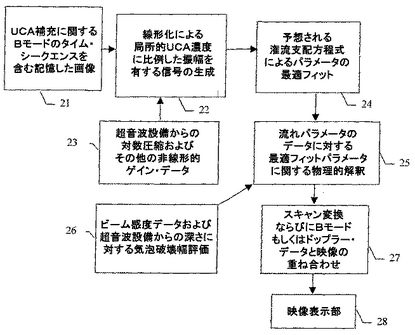
【図40a】
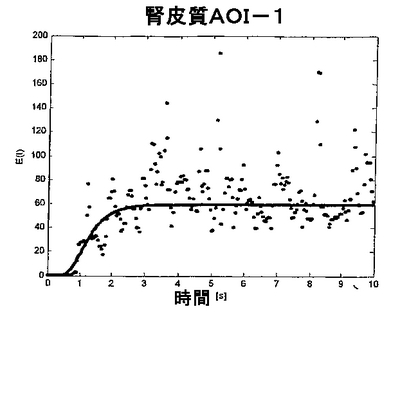
【図40b】
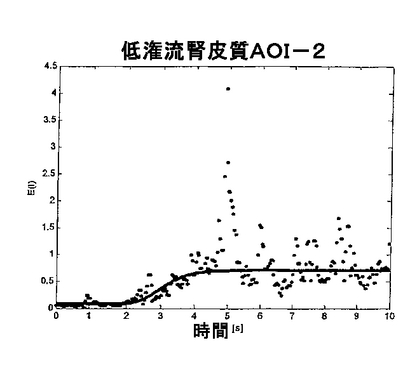
【図1b】
【図2】
【図3a】
【図3b】
【図4a】
【図4b】
【図5a】
【図5b】
【図6a】
【図6b】
【図7a】
【図7b】
【図8】
【図9a】
【図9b】
【図9c】
【図9d】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40a】
【図40b】
【公表番号】特表2006−527041(P2006−527041A)
【公表日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願番号】特願2006−516145(P2006−516145)
【出願日】平成16年6月11日(2004.6.11)
【国際出願番号】PCT/EP2004/051090
【国際公開番号】WO2004/110279
【国際公開日】平成16年12月23日(2004.12.23)
【出願人】(398063065)ブラッコ・リサーチ・ソシエテ・アノニム (13)
【氏名又は名称原語表記】BRACCO RESEARCH S.A.
【Fターム(参考)】
【公表日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願日】平成16年6月11日(2004.6.11)
【国際出願番号】PCT/EP2004/051090
【国際公開番号】WO2004/110279
【国際公開日】平成16年12月23日(2004.12.23)
【出願人】(398063065)ブラッコ・リサーチ・ソシエテ・アノニム (13)
【氏名又は名称原語表記】BRACCO RESEARCH S.A.
【Fターム(参考)】
[ Back to top ]