
足機構
【課題】受動歩行機において、直立させることを可能とし、ヒト足に近い概観で自然に歩く、足機構を提供する。
【解決手段】この足機構は、足2、足首3、足首軸まわりにトルクが発生するトルク発生装置4、足2と足首3の相対運動をロックするロック機構5、受動歩行機の下腿部の先端に取り付けられるコネクタ6、とを有する。
【解決手段】この足機構は、足2、足首3、足首軸まわりにトルクが発生するトルク発生装置4、足2と足首3の相対運動をロックするロック機構5、受動歩行機の下腿部の先端に取り付けられるコネクタ6、とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受動歩行機の足機構に関するものである。
【背景技術】
【0002】
従来の受動歩行機の足は円弧形状となっている。非特許文献2には、脚運動を最適にする円弧足の最適設計に関する設計論が開示されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】池俣吉人,佐野明人,安原潔志,藤本英雄:「受動歩行の脚運動に対する円弧足の力学的効果」,日本ロボット学会誌,vol.27,no.6,pp.661−668,2009年
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に記載の足は円弧形状となっており、その概観はヒトの足と異なる。また、足をそろえて直立することはできない。
本発明は、受動歩行機を直立させることを可能とし、ヒト足に近い概観で自然に歩く、足機構を提供すること目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、請求項1に記載の発明は、足首軸を介して相対的に動く足と足首、足首軸まわりのトルクを発生させるためのトルク発生装置、前記足と前足首の相対的運動をロックするためのロック機構、を有する足機構を特徴とする。
【0006】
これによれば、足の概観はヒトの足に近く、自然な歩行を行えるだけでなく、足をそろえて直立することができる。
【0007】
この場合、請求項2に記載のように、前記トルク発生装置は、バネが前記ローラを介してカムに接触すると前記トルクが発生するようになっていることが好ましい。また請求項3に記載のように、前記ロック機構は、着地時においてロックを解除することが好ましい。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係る足機構の構成を示す図である。
【図2】足機構の分解図である。
【図3】足首の断面図である。
【図4】足機構の断面図である。
【発明を実施するための形態】
【0009】
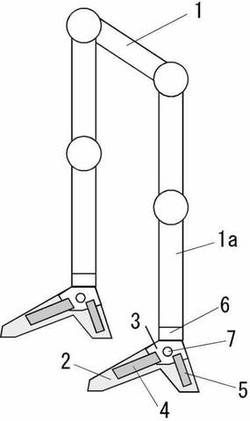
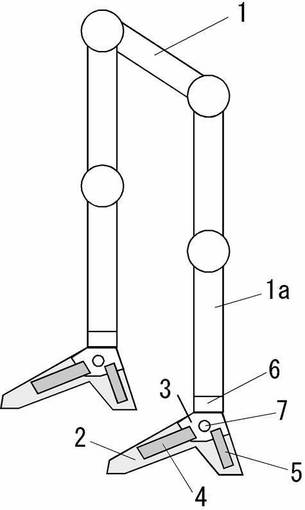
図1に、本発明の一実施形態における足機構の構成を示す。この図では、受動歩行機に足機構を備えた状態を示す。前記足機構は、足2、足首3、トルク発生装置4、ロック機構5、コネクタ6から成っている。前記足機構は前記コネクタ6を介して受動歩行機の下腿部1aの先端に取り付けられる。
【0010】
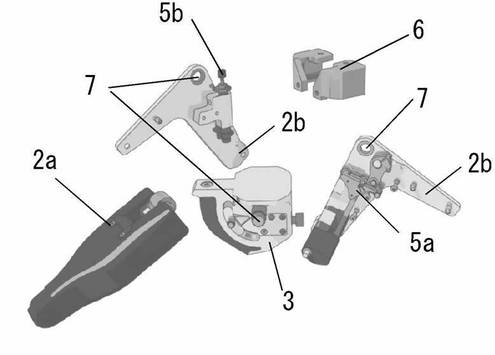
図2は足機構の分解図を示す。前記足2は、足部品2aと踵部品2bから成っている。前記足2と前記足首3は、足首軸7を介して相対的に動くことができる。
【0011】
前記ロック機構5は、リンク機構5aとダンパー5bから成っている。前記足2と前記足首3の相対角度が設定角度になると、前記足2と前記足首3をロックする。前記ダンパー5bでロック時の衝撃を緩和する。なお、前記ロックは着地の衝撃によって解除される。
【0012】
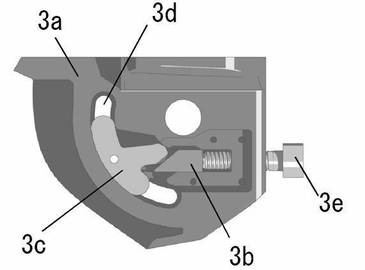
図3は前記足首3の断面図を示す。前記足首3は、足首本体3a、ガイド調整部品3b、ガイド部品3c、ガイド溝3d、調整ネジeから成っている。前記足2はガイド部品3cに取り付けられており、前記ガイド溝3dに沿って移動することができる。前記足2の稼働範囲は前記調整ネジeで調製することができる。
【0013】
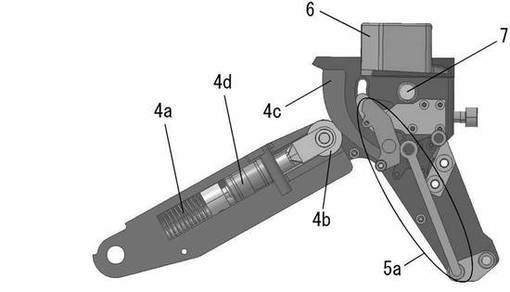
図4は足機構の断面図を示す。前記トルク発生装置4はバネ4a、ローラ4b、カム4c、シャフト4dから成っている。バネ4aは圧縮バネであり、シャフト4dとローラ4bを介してカム4cに接触する。この接触力により、足首まわりにトルクが発生する。前記トルクはカム4cの形状およびバネ4aのバネ係数から決まる。例えば受動歩行機における円弧足の圧力中心点から決めることが好ましい。
【0014】
本実施形態に係る足機構は、受動歩行機の円弧足と同じ効果をもつ。また、足機構はヒトの足形状に近く、モータなどの動力源を持たないことから,移動効率は高く,低コストである。さらに,ヒトのように靴やスリッパなどを履くことができ,様々なシーンに応じて活用できる。
【符号の説明】
【0015】
1 受動歩行機
1a 下腿部
2 足
2a 足部品
2b 踵部品
3 足首
3a 足首本体
3b ガイド調整部品
3c ガイド部品
3d ガイド溝
3e 調整ネジ
4 トルク発生装置
4a バネ
4b ローラ
4c カム
4d シャフト
5 ロック機構
5a リンク機構
5b ダンパー
6 コネクタ
7 足首軸
【技術分野】
【0001】
本発明は、受動歩行機の足機構に関するものである。
【背景技術】
【0002】
従来の受動歩行機の足は円弧形状となっている。非特許文献2には、脚運動を最適にする円弧足の最適設計に関する設計論が開示されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】池俣吉人,佐野明人,安原潔志,藤本英雄:「受動歩行の脚運動に対する円弧足の力学的効果」,日本ロボット学会誌,vol.27,no.6,pp.661−668,2009年
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に記載の足は円弧形状となっており、その概観はヒトの足と異なる。また、足をそろえて直立することはできない。
本発明は、受動歩行機を直立させることを可能とし、ヒト足に近い概観で自然に歩く、足機構を提供すること目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、請求項1に記載の発明は、足首軸を介して相対的に動く足と足首、足首軸まわりのトルクを発生させるためのトルク発生装置、前記足と前足首の相対的運動をロックするためのロック機構、を有する足機構を特徴とする。
【0006】
これによれば、足の概観はヒトの足に近く、自然な歩行を行えるだけでなく、足をそろえて直立することができる。
【0007】
この場合、請求項2に記載のように、前記トルク発生装置は、バネが前記ローラを介してカムに接触すると前記トルクが発生するようになっていることが好ましい。また請求項3に記載のように、前記ロック機構は、着地時においてロックを解除することが好ましい。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係る足機構の構成を示す図である。
【図2】足機構の分解図である。
【図3】足首の断面図である。
【図4】足機構の断面図である。
【発明を実施するための形態】
【0009】
図1に、本発明の一実施形態における足機構の構成を示す。この図では、受動歩行機に足機構を備えた状態を示す。前記足機構は、足2、足首3、トルク発生装置4、ロック機構5、コネクタ6から成っている。前記足機構は前記コネクタ6を介して受動歩行機の下腿部1aの先端に取り付けられる。
【0010】
図2は足機構の分解図を示す。前記足2は、足部品2aと踵部品2bから成っている。前記足2と前記足首3は、足首軸7を介して相対的に動くことができる。
【0011】
前記ロック機構5は、リンク機構5aとダンパー5bから成っている。前記足2と前記足首3の相対角度が設定角度になると、前記足2と前記足首3をロックする。前記ダンパー5bでロック時の衝撃を緩和する。なお、前記ロックは着地の衝撃によって解除される。
【0012】
図3は前記足首3の断面図を示す。前記足首3は、足首本体3a、ガイド調整部品3b、ガイド部品3c、ガイド溝3d、調整ネジeから成っている。前記足2はガイド部品3cに取り付けられており、前記ガイド溝3dに沿って移動することができる。前記足2の稼働範囲は前記調整ネジeで調製することができる。
【0013】
図4は足機構の断面図を示す。前記トルク発生装置4はバネ4a、ローラ4b、カム4c、シャフト4dから成っている。バネ4aは圧縮バネであり、シャフト4dとローラ4bを介してカム4cに接触する。この接触力により、足首まわりにトルクが発生する。前記トルクはカム4cの形状およびバネ4aのバネ係数から決まる。例えば受動歩行機における円弧足の圧力中心点から決めることが好ましい。
【0014】
本実施形態に係る足機構は、受動歩行機の円弧足と同じ効果をもつ。また、足機構はヒトの足形状に近く、モータなどの動力源を持たないことから,移動効率は高く,低コストである。さらに,ヒトのように靴やスリッパなどを履くことができ,様々なシーンに応じて活用できる。
【符号の説明】
【0015】
1 受動歩行機
1a 下腿部
2 足
2a 足部品
2b 踵部品
3 足首
3a 足首本体
3b ガイド調整部品
3c ガイド部品
3d ガイド溝
3e 調整ネジ
4 トルク発生装置
4a バネ
4b ローラ
4c カム
4d シャフト
5 ロック機構
5a リンク機構
5b ダンパー
6 コネクタ
7 足首軸
【特許請求の範囲】
【請求項1】
足首軸を介して相対的に動く足と足首、前記足首軸まわりのトルクを発生させるためのトルク発生装置、前記足と前記足首の相対的運動をロックするためのロック機構、を有することを特徴とする足機構。
【請求項2】
前記トルク発生装置は、バネがローラを介してカムに接触すると前記トルクが発生するようになっていることを特徴とする請求項1に記載の足機構。
【請求項3】
前記ロック機構は、着地時においてロックを解除することを特徴とする請求項1に記載の足機構。
【請求項1】
足首軸を介して相対的に動く足と足首、前記足首軸まわりのトルクを発生させるためのトルク発生装置、前記足と前記足首の相対的運動をロックするためのロック機構、を有することを特徴とする足機構。
【請求項2】
前記トルク発生装置は、バネがローラを介してカムに接触すると前記トルクが発生するようになっていることを特徴とする請求項1に記載の足機構。
【請求項3】
前記ロック機構は、着地時においてロックを解除することを特徴とする請求項1に記載の足機構。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−200793(P2012−200793A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−64638(P2011−64638)
【出願日】平成23年3月23日(2011.3.23)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月23日(2011.3.23)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
[ Back to top ]