
足関節の動的アライメントの評価システムおよび足関節の動的アライメントの評価方法
【課題】オペレータの主観的な操作による人的誤差を生じにくくするとともに、短時間で足関節の動的アライメントの評価結果を出すことができるようにする。
【解決手段】踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定する測定装置1と、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡Nを決定するとともに、踵側から爪先側にかけて設定される直線状の基準線Mに対する前記圧力中心の軌跡Nの逸脱量を演算する演算装置2とを備える。
【解決手段】踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定する測定装置1と、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡Nを決定するとともに、踵側から爪先側にかけて設定される直線状の基準線Mに対する前記圧力中心の軌跡Nの逸脱量を演算する演算装置2とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に足関節の動的アライメントの評価システムおよび足関節の動的アライメントの評価方法に関する。
【背景技術】
【0002】
足関節のアライメント異常(オーバープロネーション、アンダープロネーションなど)は、スポーツ障害の大きな要因であり、足関節の動的アライメントを測定してアライメント異常(オーバープロネーション、アンダープロネーションなど)を矯正する用具(シューズ、中敷など)を正しく処方することはスポーツ障害の予防に重要である。
【0003】
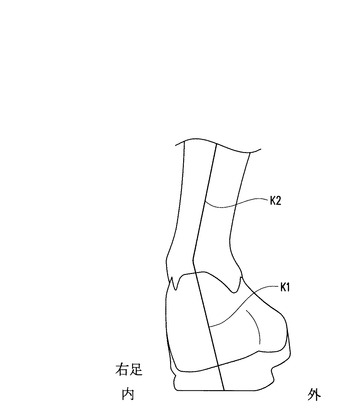
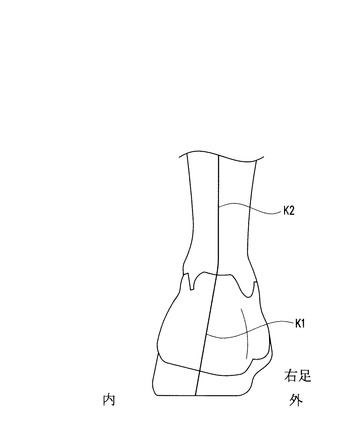
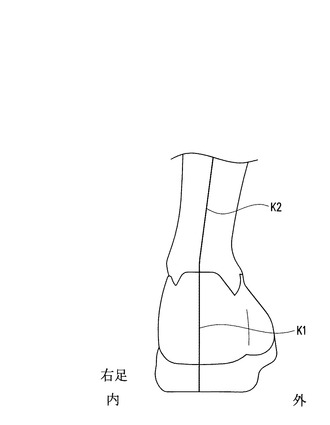
従来、ジョギング(走行)用、歩行用等のシューズとして使用者に適したものを決める場合に、使用者の足関節の動的アライメントを、例えば、オーバープロネーション(過回内)、ニュートラル、アンダープロネーション(過回外)の3つに分類し、それぞれの分類に応じたシューズを選択する手法が採用されている。ここで、「オーバープロネーション」とは、図7に示すように、踵のまわりの部分が過度に内側に傾いた状態をいい、「アンダープロネーション」とは、図8に示すように、踵のまわりの部分が過度に外側に傾いた状態をいう。また、「ニュートラル」は、図9に示すように、踵のまわりの部分が過度に傾いていない状態をいう。
【0004】
シューズの使用者の足関節の動的アライメントの測定・評価の方法としては、例えば、使用者の走歩行中の足を後方から撮影して、その画像をパソコン等のモニタに表示させ、図7〜図9に示すように、踵の部分に引いた中心線K1とふくらはぎの部分に引いた中心線K2とがなす角度を測定し、この角度の大きさに応じて、オーバープロネーション、ニュートラル、アンダープロネーションの3つに分類して評価を行うのが一般的である。
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来のように、使用者の足に中心線K1,K2を引いて走歩行中の映像を撮影して足関節の動的アライメントの分類を行う場合や、使用者の足の映像を撮影し、モニタに表示された足の画像に中心線K1,K2を引いて足関節の動的アライメントの分類を行う場合には、この分類のために足の撮影およびパソコン等の操作を行うオペレータが経験を基に主観的に中心線K1,K2を引くことになり、このため、この中心線が引かれた際に誤差(人的誤差)が生ずるおそれがあった。また、この操作を行うオペレータには、動的アライメントの評価に関する専門知識が必要であり、専門知識を有しない者がこの評価を行うことによって、評価に誤差が生ずるおそれがあった。また、上記のような手順(足の撮影、データの取り込み等)では評価結果(分類結果)を出すまでに時間がかかってしまっていた。
【0006】
本発明は、このような事情に鑑みてなされたものであり、オペレータの主観的な操作による人的誤差を生じにくくするとともに、短時間で評価結果を出すことが可能な足関節の動的アライメントの評価システムを提供することを課題とする。
【0007】
また、本発明は、オペレータの主観的な操作による人的誤差を生じにくくするとともに、短時間で評価結果を出すことが可能な足関節の動的アライメントの評価方法を提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明に係る足関節の動的アライメントの評価システムは、上記の課題を解決するためのものであって、踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする。
【0009】
かかる構成によれば、測定装置で被測定者の足の裏の圧力分布を測定し、測定された圧力分布における圧力中心の軌跡を演算し、基準線に対する圧力中心の逸脱量を演算装置で演算し、この逸脱量を足関節の動的アライメントの評価指標(分類指標)として用いることで、オペレータの操作によって決定される要素がなくなり、オペレータの主観的な操作による誤差が発生しにくく、しかも、短時間に評価結果を出すことが可能になる。
【0010】
また、足関節の動的アライメントの評価システムは、前記逸脱量が、基準線と圧力中心の軌跡とがなす領域の面積として演算されることが望ましい。
【0011】
このように、基準線と圧力中心の軌跡とがなす領域の面積を前記逸脱量として足関節の動的アライメントの分類指標に用いることで、オペレータの主観的な操作による誤差が発生しにくく、しかも短時間に評価結果を出すことが可能になる。
【0012】
また、足関節の動的アライメントの評価システムは、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類することが望ましい。
【0013】
かかる構成によれば、被測定者の足の大きさには個人差があるが、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除することによって、足関節の動的アライメントの評価指標としての逸脱量を規格化(正規化)でき、被測定者の足の大小にかかわらずに被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0014】
また、足関節の動的アライメントの評価システムは、前記逸脱量が、基準線と圧力中心の軌跡との間隔の最大値として演算されることが望ましい。
【0015】
かかる構成によれば、基準線と圧力中心の軌跡との間隔の最大値を前記逸脱量として足関節の動的アライメントの分類指標に用いることで、オペレータの主観的な操作による誤差が発生しにくく、しかも短時間に評価結果を出すことが可能になる。
【0016】
また、前記逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類することが望ましい。
【0017】
かかる構成によれば、被測定者の足の大きさには個人差があるが、逸脱量としての基準線と圧力中心の軌跡との間隔の最大値を被測定者の足の大きさに応じた量で除することによって、足関節の動的アライメントの評価指標としての逸脱量を規格化でき、被測定者の足の大小にかかわらずに被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0018】
また、足関節の動的アライメントの評価システムは、前記圧力中心の軌跡と基準線を表示可能な表示装置を備える構成を採用できる。
【0019】
かかる構成によれば、圧力中心の軌跡と基準線を表示装置で表示することによって、オペレータは、基準線に対する圧力中心の軌跡の逸脱の傾向を視覚的に把握できるようになる。
【0020】
また、足関節の動的アライメントの評価システムは、前記演算装置が、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する構成を採用できる。
【0021】
かかる構成によれば、規格化された前記面積を予め設定された基準(閾値)に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのうちの1つに分類することによって、被測定者の足関節の動的アライメントに適したシューズを決定できる。
【0022】
また、足関節の動的アライメントの評価システムは、前記演算装置は、逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する構成を採用できる。
【0023】
かかる構成によれば、規格化された前記最大値を予め設定された基準(閾値)に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのうちの1つに分類することによって、被測定者の足関節の動的アライメントに適したシューズを決定できる。
【0024】
また、本発明に係る足関節の動的アライメントの評価方法は、踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定装置で測定し、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、測定時間ごとに演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定し、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算装置で演算することを特徴とする。
【0025】
かかる方法によれば、測定装置で被測定者の足の裏の圧力分布を測定し、演算装置によって、測定された圧力分布における圧力中心の軌跡を演算するとともに、基準線に対する圧力中心の逸脱量を演算し、この逸脱量を足関節の動的アライメントの評価指標(分類指標)として用いることで、オペレータの操作によって決定される要素がなくなり、オペレータの主観的な操作による誤差が発生しにくく、しかも、短時間に評価結果を出すことが可能になる。
【0026】
また、本発明に係る足関節の動的アライメントの評価システムは、踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の荷重分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された荷重分布の荷重中心の位置を演算し、演算された荷重中心の位置に基づいて、一連の走歩行動作における荷重中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記荷重中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする。
【0027】
かかる構成によれば、測定装置で被測定者の足の裏の荷重分布を測定し、測定された荷重分布における荷重中心の軌跡を演算し、基準線に対する荷重中心の逸脱量を演算装置で演算し、この逸脱量を足関節の動的アライメントの評価指標(分類指標)として用いることで、オペレータの操作によって決定される要素がなくなり、オペレータの主観的な操作による誤差が発生しにくく、しかも、短時間に評価結果を出すことが可能になる。
【発明の効果】
【0028】
本発明によれば、オペレータの主観的な操作による人的誤差を生じにくくするとともに、短時間で足関節の動的アライメントを評価できるようになる。
【発明を実施するための最良の形態】
【0029】
以下、本発明に係る足関節の動的アライメントの評価システムおよび足関節の動的アライメントの評価方法を実施するための最良の形態を、図面に基づき説明する。
【0030】
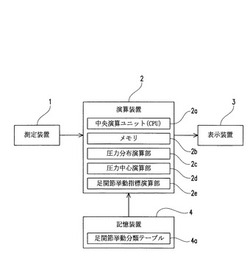
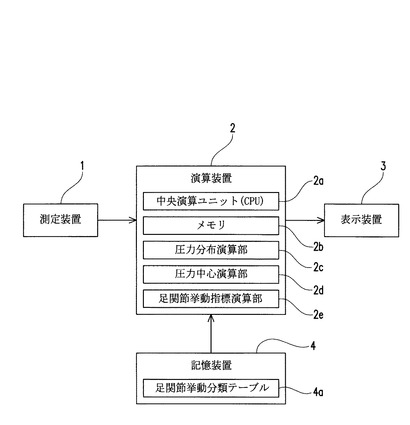
図1に示すように、足関節の動的アライメントの評価システム(以下、単に「評価システム」という)は、足を載せたときの足裏(足底)の圧力分布を測定する測定装置1と、測定装置1によって測定された圧力分布データを基に所定の演算を行う演算装置2と、測定された圧力分布および演算装置2の演算結果等を表示する表示装置3、足関節の動的アライメントの評価に必要な基準等のデータを記憶する記憶装置4を備えている。
【0031】
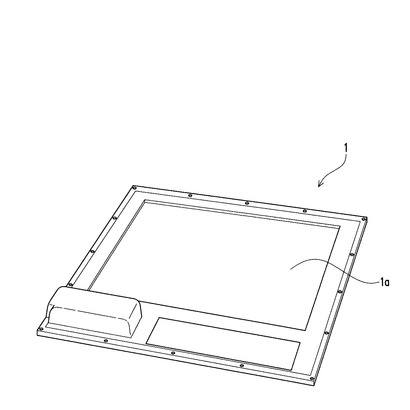
測定装置1は、図2に示すように、床等に載置されるセンサーシート1aを備える。センサーシート1aは、その上面に足が載せられると、内部に平面視碁盤目状に複数設けられたセンサー(測定点)によって、足裏の各部の圧力を測定できるようになっている。また、この測定装置1は、接続コードまたは無線通信を介して演算装置2に接続されている。
【0032】
測定装置1は、被測定者が踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を行ってセンサーシート1aに足を載せたときの圧力を一定の測定時間(例えば、約17msec)ごとに測定できるようになっている。測定装置1で測定された圧力分布データは、演算装置2に送信され、演算装置2は、この圧力分布データを画像データとして表示装置3に表示させるようになっている。なお、以下、測定時間ごとに測定されたそれぞれの圧力分布データを1つのまとまりとして「フレーム」と呼ぶ。測定装置1は、例えば、1回の走歩行動作を測定したときに、約30フレーム分の圧力分布データを測定できる。
【0033】
演算装置2としては、例えば、いわゆるパソコン等のコンピュータが使用される。この演算装置2には、圧力分布を画像データとして表示装置3に表示させたり、足関節の動的アライメントの評価に必要な所定の演算を行うソフトウェアがインストールされている。また、この演算装置2は、種々の演算を行う中央演算ユニット(CPU)2a、測定装置1によって測定された足裏の圧力データの測定結果を記憶するメモリ2b、測定装置1によって測定された圧力データに基づいて圧力分布を演算する圧力分布演算部2c、圧力データに基づいて圧力中心(Center Of Pressure(COP))を演算する圧力中心演算部(COP演算部)2d、圧力データに基づいて足関節の動的アライメントを判断するための指標を演算する指標演算部(足関節挙動指標演算部)2eを備える。
【0034】
表示装置3には、液晶ディスプレイ等のモニタが使用される。表示装置3は、演算装置2に接続されており、この演算装置2を介して、1フレームごとの画像を表示したり、複数のフレームの各測定点(センサー)における最大圧力の分布を表示することができる。
【0035】
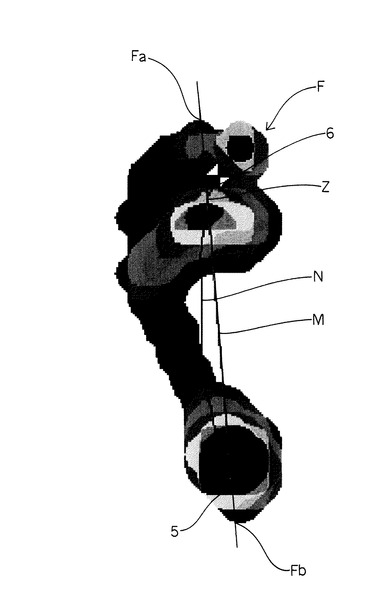
図3は、複数フレームの各測定点(センサー)における最大圧力の分布を表示装置3に表示させた場合の画像データ(以下、この画像データを「圧力分布図」という)Fを示している。本実施形態では、例えば、最初のフレームから、最後のフレームより3番目前までのフレームを用いて圧力分布図Fを描画している。
【0036】
圧力分布図Fは、被測定者の足裏の形状が表示装置3に投影され、その足裏の圧力の高低が表示されたものである。この圧力分布図Fは、圧力の高い部分と低い部分とが色分け表示(例えば、圧力が低くなればなる程、青色、紺色等で表示され、圧力が高くなればなる程、黄色、赤色等で表示)されており、その圧力の高低が視覚的に判別できるようになっている。
【0037】
図3に示すように、表示装置3に表示された圧力分布図Fには、足裏の踵側から爪先側にかけて直線状の基準線Mが描かれている。本実施形態では、表示装置3に表示された基準線Mは、圧力分布図Fと重なるように描かれており、また、足裏の第2趾の端部Faから踵部の端部Fbを結ぶように直線状に描かれている。また、評価システムは、この基準線を、表示装置3に表示することなく演算装置2によって仮想的に設定できるようになっている。
【0038】
また、演算装置2は、各フレームにおける圧力分布のうちで、圧力のつりあいのとれた点(以下「圧力中心」という)を演算によって求めることができる。具体的には、この圧力中心は、センターシートに互いに直交するX軸、Y軸をとり、このX軸方向およびY軸方向に等間隔かつ碁盤目状に設けられたセンサーの圧力と、各センサーのX軸、Y軸における座標とを用いて、演算される。演算装置2によって演算される圧力中心の位置は、X軸方向、およびY軸方向の両方で求められる。例えば、X軸方向における圧力中心の座標は、X軸方向において、各センサーで測定された圧力と各センサーの座標位置との積を求め、この値がX軸において等しくなる位置として演算により特定される。また、Y軸方向における圧力中心の座標は、Y軸方向において各センサーで測定された圧力と各センサーの座標位置との積を求め、この値がY軸において等しくなる位置として演算により特定される。なお、通常、Y軸は被測定者が走歩行動作を行った場合の進行方向にほぼ一致するように設定される。
【0039】
X軸、Y軸における圧力中心の位置(座標)は以下の式により求められる。
【数1】

【0040】
この式は、センサーシートに互いに直交するX軸、Y軸をとり、このセンサーシートに所定の座標で碁盤目状に設けられたセンサー(測定点)によって測定された圧力をもとに、X軸、Y軸それぞれにおける圧力中心の位置(座標)を求めるためのものである。
【0041】
この式において、「Xcop」は、X軸における圧力中心の位置(座標)であり、「Ycop」は、Y軸における圧力中心の位置(座標)である。また、「Xn」、「Yn」は、それぞれX軸、Y軸におけるセンサーの番号であり、「Pij」は、各座標におけるセンサーの圧力である。また、「i」は各センサーX軸における座標番号(座標位置)を示し、「j」は、各センサーのY軸における座標番号(座標位置)を示している。
【0042】
演算装置2は、各フレームで演算された圧力中心に基づいて、被測定者の一連の走歩行動作における圧力中心の軌跡N(図3参照)を決定(演算)し、表示装置3に表示させることができる。
【0043】
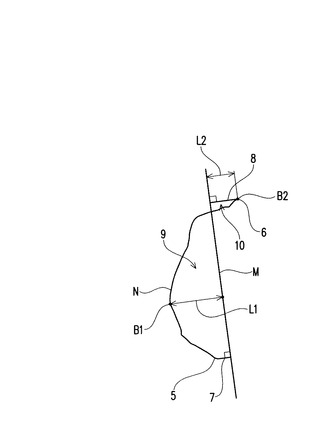
図3、図4に示すように、圧力中心の軌跡Nは、基準線Mに対して1箇所で交差(この交差点を符号Zで示す)しており、その一部が基準線Mを挟んで左右方向の一方側(図4において基準線Mの左側)に位置し、他の部分が基準線Mの他方側(図4において基準線Mの右側)に位置している。なお、圧力中心の軌跡Nは、その軌跡の形状や、基準線Mの位置の設定等によって、基準線Mと2箇所で交差したり、または基準線Mと交差しない場合もある。
【0044】
また、圧力中心の一方の端部(最初のフレームで演算された圧力中心に相当する。以下「第1端部」という)5は、基準線Mを挟んで左右方向の一方側(基準線Mの左側)に位置しており、圧力中心の他方の端部(最後のフレームより3番目前のフレームで演算された圧力中心に相当する。以下「第2端部」という)6は、基準線Mを挟んで左右方向の他方側(基準線Mの右側)に位置している。
【0045】
図4に示すように、圧力中心の軌跡Nの第1端部5は、基準線Mから直交するように引かれた直線状の補助線(以下「第1補助線」という)7に接している。また、圧力中心の軌跡Nの第2端部6は、基準線Mから直交するように引かれた補助線(以下「第2補助線」という)8に接している。
【0046】
図4に示すように、基準線Mを挟んで左右方向の一方側で、圧力中心の軌跡Nと基準線Mと第1補助線7とによって囲まれた領域(以下「第1領域」という)9が表示されている。また、基準線Mを挟んで左右方向の他方側で、圧力中心の軌跡Nと基準線Mと第2補助線8とによって囲まれた領域(以下「第2領域」という)10が表示されている。
【0047】
演算装置2は、基準線Mに対して圧力中心の軌跡Nがどの程度逸脱しているか(どの程度ずれているか)、その逸脱量を演算できる。この逸脱量は、例えば、基準線Mと圧力中心の軌跡Nとで囲まれた領域の面積として演算される。本実施形態では、第1領域9の面積(A1)から第2領域10の面積(A2)を引いた値(A1−A2)が、この逸脱量となっている。
【0048】
演算装置2は、基準線Mの圧力中心の軌跡Nとで囲まれた領域の面積を演算した後、この面積値を被測定者の足の大きさに応じた量で除する演算を行うようになっている。ここで、「足の大きさに応じた量」とは、被測定者の足の長さ、足の横幅、足裏の面積、シューズのサイズその他の量をいう。例えば、演算装置2は、基準線Mと圧力中心の軌跡Nとで囲まれた領域の面積を演算すると、この面積(A)の値を被測定者の足の長さ(α)で除した値(X=(A/α)×100(%))を求める。なお、以下、この値Xを「面積率」という。面積率を求めるのは、各被測定者ごとに足の大きさに個人差があることから、この個人差が足関節の動的アライメントの評価に影響を与えないように、前記面積を規格化(正規化)するためである。
【0049】
演算装置2は、この面積率の値に応じて、足関節の動的アライメントを評価することができる。足関節の動的アライメントは、例えば、面積率の値に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションの3つに分類される。
【0050】
記憶装置4には、測定装置1の測定結果に基づいて、演算装置2が、オーバープロネーション、ニュートラル、アンダープロネーションへの分類ができるように、それぞれに対応した基準(足関節挙動分類テーブル4a)が記憶されている。すなわち、記憶装置4には、演算装置2の演算によって求められた面積率を、オーバープロネーション、ニュートラル、アンダープロネーションに分類するために必要な、面積率の閾値のテーブルが予め設定されて記憶されている。この閾値については、本実施形態では、面積率(X)が25%未満(X<25)の場合をオーバープロネーションとし、面積率(X)が25%以上50%未満(25≦X<50)の場合をニュートラル、面積率(X)が50%以上(X≧50)の場合をアンダープロネーションとして予め設定されている。
【0051】
評価システムは、上述した基準線Mと圧力中心の軌跡Nがなす領域の面積を足関節の動的アライメントの分類指標とする場合に限らず、他の指標を用いて足関節の動的アライメントの評価を行うことができる。
【0052】
すなわち、演算装置2は、基準線Mに対する圧力中心の軌跡Nの逸脱量として、基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを用いることもできる。ここで、「基準線Mと圧力中心との間隔の最大値」Lは、図4に示すように、基準線Mを挟んで左右方向の一方側(左側)に位置する軌跡の部分において、基準線Mから最も離れた圧力中心の軌跡Nの位置B1における基準線Mからの距離L1と、基準線Mの他方側(右側)に位置する圧力中心の軌跡Nの部分において基準線Mから最も離れた位置B2における基準線Mからの距離L2との和(L1+L2)である。また、圧力中心の軌跡Nが基準線Mと交差していない場合における「基準線Mと圧力中心の軌跡Nとの間隔の最大値」は、基準線Mから最も離れた位置における圧力中心の軌跡Nと基準線Mとの間隔である。
【0053】
演算装置2は、この基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを、被測定者の足の大きさに応じた量(例えば、足の長さα)で除した値Y(Y=(L/α)×100(%))を、予め設定された基準(閾値)に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する。この基準である閾値は、記憶装置4に分類テーブル4aとして記憶されている。この閾値については、例えば、この値Yが4%未満(Y<4)の場合をオーバープロネーションとし、この値Yが4%以上8%未満(4≦Y<8)の場合をニュートラル、この値Yが8%以上(Y≧8)の場合をアンダープロネーションとして予め設定されている。
【0054】
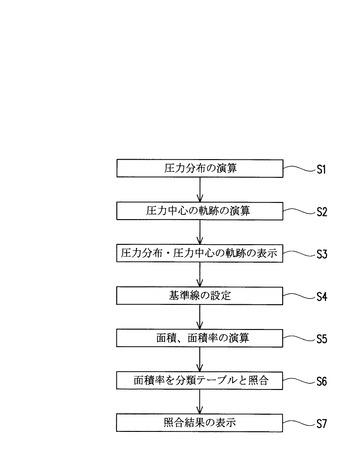
以下、図5を参照しながら、評価システムを用いた足関節の動的アライメントの評価方法を説明する。評価システムを用いて足関節の動的アライメントの評価を行うには、まず、被測定者が走歩行動作をして、測定装置1のセンサーシート1aに片足を載せる。そうすると、測定装置1は、センサーシート1aに載せられた足の圧力分布を測定し、その結果を演算装置2に送信する。演算装置2は、図5に示すように、測定装置1から送信された圧力分布のフレームごとのデータを基に、圧力分布を演算する(S1)。
【0055】
また、演算装置2は、圧力分布の各フレームのデータから圧力中心を演算し(S2)、フレームごとに演算された圧力中心の位置に基づいて圧力中心の軌跡Nを演算・決定する。そして、演算装置2は、圧力分布図F、基準線M、および圧力中心の軌跡Nを表示装置3に表示させる(S3)。そして、演算装置2は、圧力分布図Fに対する基準線Mを決定(設定)する(S4)。
【0056】
また、演算装置2は、基準線Mに対する圧力中心の軌跡Nの逸脱量を演算によって求める(S5)。逸脱量が基準線Mと圧力中心の軌跡Nとがなす領域の面積である場合は、演算装置2は、この面積と被測定者の足の大きさに応じた量(例えば、足の長さ)を求め、面積率を計算(演算)する(S5)。なお、被測定者の足の長さは、予め測定された足の長さをデータとして演算装置2に入力したものを用いてもよいし、あるいは、圧力分布図Fに表示された足の爪先(第2趾の端部Fa)から踵の端部Fbまでの基準線Mの長さを演算装置2に演算させ、この値を「足の長さ」として用いてもよい。
【0057】
また、演算装置2は、基準線Mと圧力中心の軌跡Nとの位置関係に応じて、適宜第1補助線7、第2補助線8を設定(決定)し、圧力分布図Fに描画する。また、この評価システムは、演算装置2の演算によって第1補助線7、第2補助線8が描画されるが、その他に、オペレータの操作(例えばマウス等の操作)によって、第1補助線7、第2補助線8を圧力分布図F中に表示することができるようになっている。
【0058】
演算装置2は、上記の演算によって求められた面積率等の値を、この記憶装置4に記憶されている分類テーブル4aと照合し(S6)、この分類テーブル4aの閾値に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションのいずれかに分類する。この足関節の動的アライメントの分類が完了すると、演算装置2は、その評価結果を表示装置3に表示させる(S7)。
【0059】
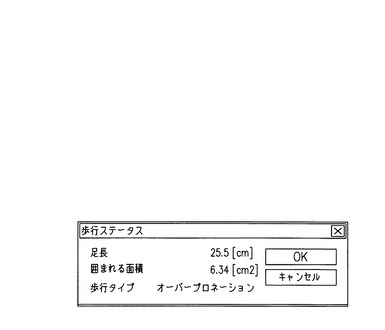
評価結果は、図6に示すように、基準線Mと圧力中心の軌跡Nとがなす領域の面積、足の長さと共に1つの画像(ウインドウ)に表示される。評価システムのオペレータはこの評価結果に応じて、被測定者に適したシューズ、中敷き等を選択する。
【0060】
以上説明した本実施形態に係る評価システムおよび評価方法によれば、測定装置1によって、被測定者の足裏の圧力分布を測定し、この圧力分布データに基づいて、演算装置2によって、基準線Mと圧力中心の軌跡Nを決定するとともに、基準線Mに対する圧力中心の軌跡Nの逸脱量を演算することによって、オペレータの主観的な操作による誤差が発生し難く、演算装置2の演算によって短時間で足関節の動的アライメントの評価結果まで算出することができるようになる。また、この評価システムは、専門知識を要さず、操作が容易に行えるので、これによっても従来のような誤差を生じにくいものである。
【0061】
また、評価システムは、前記逸脱量が、基準線Mと圧力中心の軌跡Nとがなす領域の面積として演算されることにより、より短時間に評価結果を算出することが可能になる。
【0062】
また、評価システムは、逸脱量としての前記面積を被測定者の足の長さで除した値を基に評価システムを分類することによって、評価システムの評価指標としての逸脱量(面積)を規格化でき、被測定者の足の大小にかかわらずに被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0063】
また、評価システムは、基準線Mに対する圧力中心の軌跡Nの逸脱量として、基準線Mと圧力中心の軌跡Nとの間隔の最大値を採用し、これを演算装置2によって演算することで、オペレータの主観的な操作による誤差が発生しにくく、しかも短時間に評価結果を出すことが可能になる。そして、基準線Mと圧力中心との間隔の最大値を被測定者の足の長さで除して規格化することによって、被測定者の足の大小にかかわらずに被測定者の足関節まわりの動的アライメントを評価(分類)できるようになる。
【0064】
また、評価システムは、前記圧力中心の軌跡Nと基準線Mを表示可能な表示装置3を備えているので、オペレータは、基準線Mに対する圧力中心の軌跡Nの逸脱の傾向を視覚的に把握できるようになる。
【0065】
また、評価システムは、演算装置2が、逸脱量としての前記面積を被測定者の足の長さで除した値(面積率)を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションに分類することで、被測定者の足の大小に関わらずに、足関節の動的アライメントを評価できる。
【0066】
また、評価システムは、前記演算装置2は、逸脱量としての基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを被測定者の足の長さで除した値を足関節の動的アライメントの評価指標として用い、これを演算装置2によって演算することで、オペレータの主観的な操作による誤差が生じにくく、しかも、評価結果を短時間に出すことができる。
【0067】
さらに、この逸脱量としての基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを被測定者の足の大きさに応じた量で除して規格化することによって、被測定者の足の大小にかかわらずに、被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0068】
なお、本発明は上記の実施形態に限らず、種々の変更・変形が可能である。
【0069】
例えば、上記の実施形態では、評価システムを、オーバープロネーション、ニュートラル、アンダープロネーションの3つに分類した例を説明したが、これに限らず、閾値の設定の仕方によって2つ(例えば「ニュートラル」と「オーバープロネーション」の2つ、または、「ニュートラル」と「アンダープロネーション」の2つ、あるいは、「オーバープロネーション」と「アンダープロネーション」の2つ)に分類し、または、4つ以上の複数(例えば、「オーバープロネーション」、「オーバープロネーションまたはニュートラル」、「ニュートラル」、「アンダープロネーションまたはニュートラル」、「アンダープロネーション」の5つ)に分類することも可能である。
【0070】
面積率を足関節の動的アライメントの分類指標とし、この足関節の動的アライメントを5つに分類する場合には、例えば、その閾値として、面積率(X)が15%未満(X<15)の場合を「オーバープロネーション」、面積率(X)が15%以上25%以下(15≦X≦25)の場合を「オーバープロネーション又はニュートラル」、面積率(X)が25%を越え40%未満(25<X<40)の場合を「ニュートラル」、面積率(X)が40%以上50%以下(40≦X≦50)の場合を「ニュートラル又はアンダープロネーション」、面積率(X)が50%を越える場合(X>50)を「アンダープロネーション」と設定するようにしてもよい。
【0071】
また、基準線Mと圧力中心との間隔の最大値Lを被測定者の足の大きさに応じた量で除した値(Y)を足関節の動的アライメントの分類指標とし、この足関節の動的アライメントを5つに分類する場合には、その閾値として、例えば、この値(Y)が、3%未満(Y<3)の場合を「オーバープロネーション」、この値(Y)が3%以上5%以下の場合を「オーバープロネーション又はニュートラル」、この値(Y)が5%を越え8%未満(5<Y<8)の場合を「ニュートラル」、この値(Y)が8%以上10%以下(8≦Y≦10)の場合を「ニュートラル又はアンダープロネーション」、この値(Y)が10%を越える場合(Y>10)を「アンダープロネーション」と設定するようにしてもよい。
【0072】
上記の実施形態では、評価システムとして、基準線Mと圧力中心の軌跡Nを表示可能な表示装置3を備えたものを例示したが、表示装置3を使用せずに、演算結果(評価結果)を演算装置2が音や表示灯の点灯など、種々の方法で通知できるような構成とされていてもよい。
【0073】
上記の実施形態では、演算装置2によって基準線Mを圧力分布図Fと重なるように設定した例を示したが、この基準線Mは、圧力分布図Fと重ならずに、所定の距離で圧力分布図Fから離れた位置に設定されてもよい。また、上記の実施形態では、基準線Mは、圧力分布図Fに表れた足の第2趾の端部Faと踵の端部Fbを通るように設定されていたが、これに限らず、任意の傾斜角度で設定されていてもよい。
【0074】
上記の実施形態では、評価システムの分類のための面積率の閾値として、面積率(X)が25%未満(X<25)の場合がオーバープロネーションとし、面積率(X)が25%以上50%未満(25≦X<50)の場合がニュートラル、面積率(X)が50%以上(X≧50)の場合がアンダープロネーションとした例を示したが、これらの値に限られない。
【0075】
また、上記の実施形態では、評価システムの分類のための指標として、この基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを、被測定者の足の大きさに応じた量(例えば、足の長さα)で除した値Y(Y=(L/α)×100(%))を示し、その閾値として、この値Yが4%未満(Y<4)の場合をオーバープロネーションとし、この値Yが4%以上8%未満(4≦Y<8)の場合をニュートラル、この値Yが8%以上(Y≧8)の場合をアンダープロネーションに分類した例を示したが、これらの値に限られない。
【0076】
上記の実施の形態では、測定装置1、演算装置2、表示装置3が別体とされた評価システムを例示したが、これに限らず、評価システムは、測定装置1に演算装置2が組み込まれて一体とされたものや、測定装置1に演算装置2および表示装置3が組み込まれて一体とされたものであってもよい。また、記憶装置4は、演算装置2内に組み込まれて一体とされていてもよい。
【0077】
また、評価システムは、圧力中心の軌跡Nの曲率半径に基づいて、足関節の動的アライメントの分類を行うことができる。すなわち、演算装置2は、圧力中心の軌跡Nが曲線状で示される場合に、その曲率半径を演算できるようになっている。演算装置2は、この曲率半径を演算によって求めるとともに、その結果を、予め設定されている閾値(基準)に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションのいずれかに分類することができる。
【0078】
また、演算装置2によって圧力中心の軌跡の長さ(軌跡長)を演算し、予め設定された基準(例えば閾値)にも基づいて、足関節の動的アライメントの分類(オーバープロネーション、ニュートラル、アンダープロネーションの分類)を行うようにしてもよい。
また、上記の実施形態では、測定装置1が所定の時間(17msec)で1フレームの測定を行い、所定のフレーム数(約30フレーム)の測定を行っていたが、測定装置1の1フレームの測定時間、およびフレーム数は適宜変更・調整が可能である。
【0079】
また、上記の実施形態では、被測定者が走歩行動作を行った場合の足裏の圧力分布を測定装置1によって測定し、この圧力分布のデータに基づいて、圧力中心および圧力中心の軌跡Nを演算装置2によって演算していたが、これに限らず、被測定者が走歩行動作を行ったときの足裏の荷重分布を測定装置によって測定し、この荷重分布のデータに基づいて荷重中心(Center Of Force(COF))および荷重中心の軌跡を演算装置によって演算し、その荷重中心と基準線Mとの逸脱量を予め定められた基準(例えば閾値)に基づいて足関節の動的アライメントの評価を行うようにしてもよい。この場合には、上記の実施形態で示した圧力中心の計算式を応用して荷重中心の位置を演算装置2によって演算することができる。
【0080】
また、上記の実施形態では、基準線と圧力中心の軌跡とがなす領域の面積を求める場合に、第1領域9の面積(A1)から第2領域10の面積(A2)を引いた値(A1−A2)を逸脱量(面積)としていたが、第1領域9の面積(A1)と第2領域10の面積(A2)との和(A1+A2)を被測定者の足の大きさに応じた量で除した値を面積率として用いてもよい。または、第1領域9の面積(A1)と第2領域10の面積(A2)を比較して面積の大きい方を被測定者の足の大きさに応じた量で除した値を面積率として用いてもよい。
【0081】
また、上記の実施形態では、基準線Mと圧力中心との間隔の最大値Lは、基準線Mを挟んで左右方向の一方側(左側)に位置する軌跡の部分において、基準線Mから最も離れた圧力中心の軌跡Nの位置B1における基準線Mからの距離L1と、基準線Mの他方側(右側)に位置する圧力中心の軌跡Nの部分において基準線Mから最も離れた位置B2における基準線Mからの距離L2との和(L1+L2)であったが、これに限らず、前記距離L1と距離L2を比較して大きい方の値を、基準線Mと圧力中心の間隔の最大値Lとしてもよい。さらに、この基準線Mと圧力中心との間隔の最大値Lには、前記距離L1と距離L2の差(L1−L2)を用いることもできる。
【図面の簡単な説明】
【0082】
【図1】本発明に係る足関節の動的アライメントの評価システムの概略図である。
【図2】足関節の動的アライメントの評価システムにおける測定装置を示す斜視図である。
【図3】足関節の動的アライメントの評価システムにおける表示装置に表示された圧力分布図である。
【図4】基準線と圧力中心の軌跡を示す図である。
【図5】足関節の動的アライメントの評価システムによる足関節の動的アライメントの評価に係るフローチャートである。
【図6】表示装置に表示される足関節の動的アライメントの演算結果の例である。
【図7】オーバープロネーションを説明するための足の関節まわりの背面図である。
【図8】ニュートラルを説明するための足の関節まわりの背面図である。
【図9】アンダープロネーションを説明するための足の関節まわりの背面図である。
【符号の説明】
【0083】
1…測定装置、2…演算装置、3…表示装置、4…記憶装置、M…基準線、N…圧力中心の軌跡
【技術分野】
【0001】
本発明は、特に足関節の動的アライメントの評価システムおよび足関節の動的アライメントの評価方法に関する。
【背景技術】
【0002】
足関節のアライメント異常(オーバープロネーション、アンダープロネーションなど)は、スポーツ障害の大きな要因であり、足関節の動的アライメントを測定してアライメント異常(オーバープロネーション、アンダープロネーションなど)を矯正する用具(シューズ、中敷など)を正しく処方することはスポーツ障害の予防に重要である。
【0003】
従来、ジョギング(走行)用、歩行用等のシューズとして使用者に適したものを決める場合に、使用者の足関節の動的アライメントを、例えば、オーバープロネーション(過回内)、ニュートラル、アンダープロネーション(過回外)の3つに分類し、それぞれの分類に応じたシューズを選択する手法が採用されている。ここで、「オーバープロネーション」とは、図7に示すように、踵のまわりの部分が過度に内側に傾いた状態をいい、「アンダープロネーション」とは、図8に示すように、踵のまわりの部分が過度に外側に傾いた状態をいう。また、「ニュートラル」は、図9に示すように、踵のまわりの部分が過度に傾いていない状態をいう。
【0004】
シューズの使用者の足関節の動的アライメントの測定・評価の方法としては、例えば、使用者の走歩行中の足を後方から撮影して、その画像をパソコン等のモニタに表示させ、図7〜図9に示すように、踵の部分に引いた中心線K1とふくらはぎの部分に引いた中心線K2とがなす角度を測定し、この角度の大きさに応じて、オーバープロネーション、ニュートラル、アンダープロネーションの3つに分類して評価を行うのが一般的である。
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来のように、使用者の足に中心線K1,K2を引いて走歩行中の映像を撮影して足関節の動的アライメントの分類を行う場合や、使用者の足の映像を撮影し、モニタに表示された足の画像に中心線K1,K2を引いて足関節の動的アライメントの分類を行う場合には、この分類のために足の撮影およびパソコン等の操作を行うオペレータが経験を基に主観的に中心線K1,K2を引くことになり、このため、この中心線が引かれた際に誤差(人的誤差)が生ずるおそれがあった。また、この操作を行うオペレータには、動的アライメントの評価に関する専門知識が必要であり、専門知識を有しない者がこの評価を行うことによって、評価に誤差が生ずるおそれがあった。また、上記のような手順(足の撮影、データの取り込み等)では評価結果(分類結果)を出すまでに時間がかかってしまっていた。
【0006】
本発明は、このような事情に鑑みてなされたものであり、オペレータの主観的な操作による人的誤差を生じにくくするとともに、短時間で評価結果を出すことが可能な足関節の動的アライメントの評価システムを提供することを課題とする。
【0007】
また、本発明は、オペレータの主観的な操作による人的誤差を生じにくくするとともに、短時間で評価結果を出すことが可能な足関節の動的アライメントの評価方法を提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明に係る足関節の動的アライメントの評価システムは、上記の課題を解決するためのものであって、踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする。
【0009】
かかる構成によれば、測定装置で被測定者の足の裏の圧力分布を測定し、測定された圧力分布における圧力中心の軌跡を演算し、基準線に対する圧力中心の逸脱量を演算装置で演算し、この逸脱量を足関節の動的アライメントの評価指標(分類指標)として用いることで、オペレータの操作によって決定される要素がなくなり、オペレータの主観的な操作による誤差が発生しにくく、しかも、短時間に評価結果を出すことが可能になる。
【0010】
また、足関節の動的アライメントの評価システムは、前記逸脱量が、基準線と圧力中心の軌跡とがなす領域の面積として演算されることが望ましい。
【0011】
このように、基準線と圧力中心の軌跡とがなす領域の面積を前記逸脱量として足関節の動的アライメントの分類指標に用いることで、オペレータの主観的な操作による誤差が発生しにくく、しかも短時間に評価結果を出すことが可能になる。
【0012】
また、足関節の動的アライメントの評価システムは、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類することが望ましい。
【0013】
かかる構成によれば、被測定者の足の大きさには個人差があるが、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除することによって、足関節の動的アライメントの評価指標としての逸脱量を規格化(正規化)でき、被測定者の足の大小にかかわらずに被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0014】
また、足関節の動的アライメントの評価システムは、前記逸脱量が、基準線と圧力中心の軌跡との間隔の最大値として演算されることが望ましい。
【0015】
かかる構成によれば、基準線と圧力中心の軌跡との間隔の最大値を前記逸脱量として足関節の動的アライメントの分類指標に用いることで、オペレータの主観的な操作による誤差が発生しにくく、しかも短時間に評価結果を出すことが可能になる。
【0016】
また、前記逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類することが望ましい。
【0017】
かかる構成によれば、被測定者の足の大きさには個人差があるが、逸脱量としての基準線と圧力中心の軌跡との間隔の最大値を被測定者の足の大きさに応じた量で除することによって、足関節の動的アライメントの評価指標としての逸脱量を規格化でき、被測定者の足の大小にかかわらずに被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0018】
また、足関節の動的アライメントの評価システムは、前記圧力中心の軌跡と基準線を表示可能な表示装置を備える構成を採用できる。
【0019】
かかる構成によれば、圧力中心の軌跡と基準線を表示装置で表示することによって、オペレータは、基準線に対する圧力中心の軌跡の逸脱の傾向を視覚的に把握できるようになる。
【0020】
また、足関節の動的アライメントの評価システムは、前記演算装置が、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する構成を採用できる。
【0021】
かかる構成によれば、規格化された前記面積を予め設定された基準(閾値)に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのうちの1つに分類することによって、被測定者の足関節の動的アライメントに適したシューズを決定できる。
【0022】
また、足関節の動的アライメントの評価システムは、前記演算装置は、逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する構成を採用できる。
【0023】
かかる構成によれば、規格化された前記最大値を予め設定された基準(閾値)に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのうちの1つに分類することによって、被測定者の足関節の動的アライメントに適したシューズを決定できる。
【0024】
また、本発明に係る足関節の動的アライメントの評価方法は、踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定装置で測定し、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、測定時間ごとに演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定し、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算装置で演算することを特徴とする。
【0025】
かかる方法によれば、測定装置で被測定者の足の裏の圧力分布を測定し、演算装置によって、測定された圧力分布における圧力中心の軌跡を演算するとともに、基準線に対する圧力中心の逸脱量を演算し、この逸脱量を足関節の動的アライメントの評価指標(分類指標)として用いることで、オペレータの操作によって決定される要素がなくなり、オペレータの主観的な操作による誤差が発生しにくく、しかも、短時間に評価結果を出すことが可能になる。
【0026】
また、本発明に係る足関節の動的アライメントの評価システムは、踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の荷重分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された荷重分布の荷重中心の位置を演算し、演算された荷重中心の位置に基づいて、一連の走歩行動作における荷重中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記荷重中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする。
【0027】
かかる構成によれば、測定装置で被測定者の足の裏の荷重分布を測定し、測定された荷重分布における荷重中心の軌跡を演算し、基準線に対する荷重中心の逸脱量を演算装置で演算し、この逸脱量を足関節の動的アライメントの評価指標(分類指標)として用いることで、オペレータの操作によって決定される要素がなくなり、オペレータの主観的な操作による誤差が発生しにくく、しかも、短時間に評価結果を出すことが可能になる。
【発明の効果】
【0028】
本発明によれば、オペレータの主観的な操作による人的誤差を生じにくくするとともに、短時間で足関節の動的アライメントを評価できるようになる。
【発明を実施するための最良の形態】
【0029】
以下、本発明に係る足関節の動的アライメントの評価システムおよび足関節の動的アライメントの評価方法を実施するための最良の形態を、図面に基づき説明する。
【0030】
図1に示すように、足関節の動的アライメントの評価システム(以下、単に「評価システム」という)は、足を載せたときの足裏(足底)の圧力分布を測定する測定装置1と、測定装置1によって測定された圧力分布データを基に所定の演算を行う演算装置2と、測定された圧力分布および演算装置2の演算結果等を表示する表示装置3、足関節の動的アライメントの評価に必要な基準等のデータを記憶する記憶装置4を備えている。
【0031】
測定装置1は、図2に示すように、床等に載置されるセンサーシート1aを備える。センサーシート1aは、その上面に足が載せられると、内部に平面視碁盤目状に複数設けられたセンサー(測定点)によって、足裏の各部の圧力を測定できるようになっている。また、この測定装置1は、接続コードまたは無線通信を介して演算装置2に接続されている。
【0032】
測定装置1は、被測定者が踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を行ってセンサーシート1aに足を載せたときの圧力を一定の測定時間(例えば、約17msec)ごとに測定できるようになっている。測定装置1で測定された圧力分布データは、演算装置2に送信され、演算装置2は、この圧力分布データを画像データとして表示装置3に表示させるようになっている。なお、以下、測定時間ごとに測定されたそれぞれの圧力分布データを1つのまとまりとして「フレーム」と呼ぶ。測定装置1は、例えば、1回の走歩行動作を測定したときに、約30フレーム分の圧力分布データを測定できる。
【0033】
演算装置2としては、例えば、いわゆるパソコン等のコンピュータが使用される。この演算装置2には、圧力分布を画像データとして表示装置3に表示させたり、足関節の動的アライメントの評価に必要な所定の演算を行うソフトウェアがインストールされている。また、この演算装置2は、種々の演算を行う中央演算ユニット(CPU)2a、測定装置1によって測定された足裏の圧力データの測定結果を記憶するメモリ2b、測定装置1によって測定された圧力データに基づいて圧力分布を演算する圧力分布演算部2c、圧力データに基づいて圧力中心(Center Of Pressure(COP))を演算する圧力中心演算部(COP演算部)2d、圧力データに基づいて足関節の動的アライメントを判断するための指標を演算する指標演算部(足関節挙動指標演算部)2eを備える。
【0034】
表示装置3には、液晶ディスプレイ等のモニタが使用される。表示装置3は、演算装置2に接続されており、この演算装置2を介して、1フレームごとの画像を表示したり、複数のフレームの各測定点(センサー)における最大圧力の分布を表示することができる。
【0035】
図3は、複数フレームの各測定点(センサー)における最大圧力の分布を表示装置3に表示させた場合の画像データ(以下、この画像データを「圧力分布図」という)Fを示している。本実施形態では、例えば、最初のフレームから、最後のフレームより3番目前までのフレームを用いて圧力分布図Fを描画している。
【0036】
圧力分布図Fは、被測定者の足裏の形状が表示装置3に投影され、その足裏の圧力の高低が表示されたものである。この圧力分布図Fは、圧力の高い部分と低い部分とが色分け表示(例えば、圧力が低くなればなる程、青色、紺色等で表示され、圧力が高くなればなる程、黄色、赤色等で表示)されており、その圧力の高低が視覚的に判別できるようになっている。
【0037】
図3に示すように、表示装置3に表示された圧力分布図Fには、足裏の踵側から爪先側にかけて直線状の基準線Mが描かれている。本実施形態では、表示装置3に表示された基準線Mは、圧力分布図Fと重なるように描かれており、また、足裏の第2趾の端部Faから踵部の端部Fbを結ぶように直線状に描かれている。また、評価システムは、この基準線を、表示装置3に表示することなく演算装置2によって仮想的に設定できるようになっている。
【0038】
また、演算装置2は、各フレームにおける圧力分布のうちで、圧力のつりあいのとれた点(以下「圧力中心」という)を演算によって求めることができる。具体的には、この圧力中心は、センターシートに互いに直交するX軸、Y軸をとり、このX軸方向およびY軸方向に等間隔かつ碁盤目状に設けられたセンサーの圧力と、各センサーのX軸、Y軸における座標とを用いて、演算される。演算装置2によって演算される圧力中心の位置は、X軸方向、およびY軸方向の両方で求められる。例えば、X軸方向における圧力中心の座標は、X軸方向において、各センサーで測定された圧力と各センサーの座標位置との積を求め、この値がX軸において等しくなる位置として演算により特定される。また、Y軸方向における圧力中心の座標は、Y軸方向において各センサーで測定された圧力と各センサーの座標位置との積を求め、この値がY軸において等しくなる位置として演算により特定される。なお、通常、Y軸は被測定者が走歩行動作を行った場合の進行方向にほぼ一致するように設定される。
【0039】
X軸、Y軸における圧力中心の位置(座標)は以下の式により求められる。
【数1】
【0040】
この式は、センサーシートに互いに直交するX軸、Y軸をとり、このセンサーシートに所定の座標で碁盤目状に設けられたセンサー(測定点)によって測定された圧力をもとに、X軸、Y軸それぞれにおける圧力中心の位置(座標)を求めるためのものである。
【0041】
この式において、「Xcop」は、X軸における圧力中心の位置(座標)であり、「Ycop」は、Y軸における圧力中心の位置(座標)である。また、「Xn」、「Yn」は、それぞれX軸、Y軸におけるセンサーの番号であり、「Pij」は、各座標におけるセンサーの圧力である。また、「i」は各センサーX軸における座標番号(座標位置)を示し、「j」は、各センサーのY軸における座標番号(座標位置)を示している。
【0042】
演算装置2は、各フレームで演算された圧力中心に基づいて、被測定者の一連の走歩行動作における圧力中心の軌跡N(図3参照)を決定(演算)し、表示装置3に表示させることができる。
【0043】
図3、図4に示すように、圧力中心の軌跡Nは、基準線Mに対して1箇所で交差(この交差点を符号Zで示す)しており、その一部が基準線Mを挟んで左右方向の一方側(図4において基準線Mの左側)に位置し、他の部分が基準線Mの他方側(図4において基準線Mの右側)に位置している。なお、圧力中心の軌跡Nは、その軌跡の形状や、基準線Mの位置の設定等によって、基準線Mと2箇所で交差したり、または基準線Mと交差しない場合もある。
【0044】
また、圧力中心の一方の端部(最初のフレームで演算された圧力中心に相当する。以下「第1端部」という)5は、基準線Mを挟んで左右方向の一方側(基準線Mの左側)に位置しており、圧力中心の他方の端部(最後のフレームより3番目前のフレームで演算された圧力中心に相当する。以下「第2端部」という)6は、基準線Mを挟んで左右方向の他方側(基準線Mの右側)に位置している。
【0045】
図4に示すように、圧力中心の軌跡Nの第1端部5は、基準線Mから直交するように引かれた直線状の補助線(以下「第1補助線」という)7に接している。また、圧力中心の軌跡Nの第2端部6は、基準線Mから直交するように引かれた補助線(以下「第2補助線」という)8に接している。
【0046】
図4に示すように、基準線Mを挟んで左右方向の一方側で、圧力中心の軌跡Nと基準線Mと第1補助線7とによって囲まれた領域(以下「第1領域」という)9が表示されている。また、基準線Mを挟んで左右方向の他方側で、圧力中心の軌跡Nと基準線Mと第2補助線8とによって囲まれた領域(以下「第2領域」という)10が表示されている。
【0047】
演算装置2は、基準線Mに対して圧力中心の軌跡Nがどの程度逸脱しているか(どの程度ずれているか)、その逸脱量を演算できる。この逸脱量は、例えば、基準線Mと圧力中心の軌跡Nとで囲まれた領域の面積として演算される。本実施形態では、第1領域9の面積(A1)から第2領域10の面積(A2)を引いた値(A1−A2)が、この逸脱量となっている。
【0048】
演算装置2は、基準線Mの圧力中心の軌跡Nとで囲まれた領域の面積を演算した後、この面積値を被測定者の足の大きさに応じた量で除する演算を行うようになっている。ここで、「足の大きさに応じた量」とは、被測定者の足の長さ、足の横幅、足裏の面積、シューズのサイズその他の量をいう。例えば、演算装置2は、基準線Mと圧力中心の軌跡Nとで囲まれた領域の面積を演算すると、この面積(A)の値を被測定者の足の長さ(α)で除した値(X=(A/α)×100(%))を求める。なお、以下、この値Xを「面積率」という。面積率を求めるのは、各被測定者ごとに足の大きさに個人差があることから、この個人差が足関節の動的アライメントの評価に影響を与えないように、前記面積を規格化(正規化)するためである。
【0049】
演算装置2は、この面積率の値に応じて、足関節の動的アライメントを評価することができる。足関節の動的アライメントは、例えば、面積率の値に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションの3つに分類される。
【0050】
記憶装置4には、測定装置1の測定結果に基づいて、演算装置2が、オーバープロネーション、ニュートラル、アンダープロネーションへの分類ができるように、それぞれに対応した基準(足関節挙動分類テーブル4a)が記憶されている。すなわち、記憶装置4には、演算装置2の演算によって求められた面積率を、オーバープロネーション、ニュートラル、アンダープロネーションに分類するために必要な、面積率の閾値のテーブルが予め設定されて記憶されている。この閾値については、本実施形態では、面積率(X)が25%未満(X<25)の場合をオーバープロネーションとし、面積率(X)が25%以上50%未満(25≦X<50)の場合をニュートラル、面積率(X)が50%以上(X≧50)の場合をアンダープロネーションとして予め設定されている。
【0051】
評価システムは、上述した基準線Mと圧力中心の軌跡Nがなす領域の面積を足関節の動的アライメントの分類指標とする場合に限らず、他の指標を用いて足関節の動的アライメントの評価を行うことができる。
【0052】
すなわち、演算装置2は、基準線Mに対する圧力中心の軌跡Nの逸脱量として、基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを用いることもできる。ここで、「基準線Mと圧力中心との間隔の最大値」Lは、図4に示すように、基準線Mを挟んで左右方向の一方側(左側)に位置する軌跡の部分において、基準線Mから最も離れた圧力中心の軌跡Nの位置B1における基準線Mからの距離L1と、基準線Mの他方側(右側)に位置する圧力中心の軌跡Nの部分において基準線Mから最も離れた位置B2における基準線Mからの距離L2との和(L1+L2)である。また、圧力中心の軌跡Nが基準線Mと交差していない場合における「基準線Mと圧力中心の軌跡Nとの間隔の最大値」は、基準線Mから最も離れた位置における圧力中心の軌跡Nと基準線Mとの間隔である。
【0053】
演算装置2は、この基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを、被測定者の足の大きさに応じた量(例えば、足の長さα)で除した値Y(Y=(L/α)×100(%))を、予め設定された基準(閾値)に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する。この基準である閾値は、記憶装置4に分類テーブル4aとして記憶されている。この閾値については、例えば、この値Yが4%未満(Y<4)の場合をオーバープロネーションとし、この値Yが4%以上8%未満(4≦Y<8)の場合をニュートラル、この値Yが8%以上(Y≧8)の場合をアンダープロネーションとして予め設定されている。
【0054】
以下、図5を参照しながら、評価システムを用いた足関節の動的アライメントの評価方法を説明する。評価システムを用いて足関節の動的アライメントの評価を行うには、まず、被測定者が走歩行動作をして、測定装置1のセンサーシート1aに片足を載せる。そうすると、測定装置1は、センサーシート1aに載せられた足の圧力分布を測定し、その結果を演算装置2に送信する。演算装置2は、図5に示すように、測定装置1から送信された圧力分布のフレームごとのデータを基に、圧力分布を演算する(S1)。
【0055】
また、演算装置2は、圧力分布の各フレームのデータから圧力中心を演算し(S2)、フレームごとに演算された圧力中心の位置に基づいて圧力中心の軌跡Nを演算・決定する。そして、演算装置2は、圧力分布図F、基準線M、および圧力中心の軌跡Nを表示装置3に表示させる(S3)。そして、演算装置2は、圧力分布図Fに対する基準線Mを決定(設定)する(S4)。
【0056】
また、演算装置2は、基準線Mに対する圧力中心の軌跡Nの逸脱量を演算によって求める(S5)。逸脱量が基準線Mと圧力中心の軌跡Nとがなす領域の面積である場合は、演算装置2は、この面積と被測定者の足の大きさに応じた量(例えば、足の長さ)を求め、面積率を計算(演算)する(S5)。なお、被測定者の足の長さは、予め測定された足の長さをデータとして演算装置2に入力したものを用いてもよいし、あるいは、圧力分布図Fに表示された足の爪先(第2趾の端部Fa)から踵の端部Fbまでの基準線Mの長さを演算装置2に演算させ、この値を「足の長さ」として用いてもよい。
【0057】
また、演算装置2は、基準線Mと圧力中心の軌跡Nとの位置関係に応じて、適宜第1補助線7、第2補助線8を設定(決定)し、圧力分布図Fに描画する。また、この評価システムは、演算装置2の演算によって第1補助線7、第2補助線8が描画されるが、その他に、オペレータの操作(例えばマウス等の操作)によって、第1補助線7、第2補助線8を圧力分布図F中に表示することができるようになっている。
【0058】
演算装置2は、上記の演算によって求められた面積率等の値を、この記憶装置4に記憶されている分類テーブル4aと照合し(S6)、この分類テーブル4aの閾値に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションのいずれかに分類する。この足関節の動的アライメントの分類が完了すると、演算装置2は、その評価結果を表示装置3に表示させる(S7)。
【0059】
評価結果は、図6に示すように、基準線Mと圧力中心の軌跡Nとがなす領域の面積、足の長さと共に1つの画像(ウインドウ)に表示される。評価システムのオペレータはこの評価結果に応じて、被測定者に適したシューズ、中敷き等を選択する。
【0060】
以上説明した本実施形態に係る評価システムおよび評価方法によれば、測定装置1によって、被測定者の足裏の圧力分布を測定し、この圧力分布データに基づいて、演算装置2によって、基準線Mと圧力中心の軌跡Nを決定するとともに、基準線Mに対する圧力中心の軌跡Nの逸脱量を演算することによって、オペレータの主観的な操作による誤差が発生し難く、演算装置2の演算によって短時間で足関節の動的アライメントの評価結果まで算出することができるようになる。また、この評価システムは、専門知識を要さず、操作が容易に行えるので、これによっても従来のような誤差を生じにくいものである。
【0061】
また、評価システムは、前記逸脱量が、基準線Mと圧力中心の軌跡Nとがなす領域の面積として演算されることにより、より短時間に評価結果を算出することが可能になる。
【0062】
また、評価システムは、逸脱量としての前記面積を被測定者の足の長さで除した値を基に評価システムを分類することによって、評価システムの評価指標としての逸脱量(面積)を規格化でき、被測定者の足の大小にかかわらずに被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0063】
また、評価システムは、基準線Mに対する圧力中心の軌跡Nの逸脱量として、基準線Mと圧力中心の軌跡Nとの間隔の最大値を採用し、これを演算装置2によって演算することで、オペレータの主観的な操作による誤差が発生しにくく、しかも短時間に評価結果を出すことが可能になる。そして、基準線Mと圧力中心との間隔の最大値を被測定者の足の長さで除して規格化することによって、被測定者の足の大小にかかわらずに被測定者の足関節まわりの動的アライメントを評価(分類)できるようになる。
【0064】
また、評価システムは、前記圧力中心の軌跡Nと基準線Mを表示可能な表示装置3を備えているので、オペレータは、基準線Mに対する圧力中心の軌跡Nの逸脱の傾向を視覚的に把握できるようになる。
【0065】
また、評価システムは、演算装置2が、逸脱量としての前記面積を被測定者の足の長さで除した値(面積率)を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションに分類することで、被測定者の足の大小に関わらずに、足関節の動的アライメントを評価できる。
【0066】
また、評価システムは、前記演算装置2は、逸脱量としての基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを被測定者の足の長さで除した値を足関節の動的アライメントの評価指標として用い、これを演算装置2によって演算することで、オペレータの主観的な操作による誤差が生じにくく、しかも、評価結果を短時間に出すことができる。
【0067】
さらに、この逸脱量としての基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを被測定者の足の大きさに応じた量で除して規格化することによって、被測定者の足の大小にかかわらずに、被測定者の足関節の動的アライメントを評価(分類)できるようになる。
【0068】
なお、本発明は上記の実施形態に限らず、種々の変更・変形が可能である。
【0069】
例えば、上記の実施形態では、評価システムを、オーバープロネーション、ニュートラル、アンダープロネーションの3つに分類した例を説明したが、これに限らず、閾値の設定の仕方によって2つ(例えば「ニュートラル」と「オーバープロネーション」の2つ、または、「ニュートラル」と「アンダープロネーション」の2つ、あるいは、「オーバープロネーション」と「アンダープロネーション」の2つ)に分類し、または、4つ以上の複数(例えば、「オーバープロネーション」、「オーバープロネーションまたはニュートラル」、「ニュートラル」、「アンダープロネーションまたはニュートラル」、「アンダープロネーション」の5つ)に分類することも可能である。
【0070】
面積率を足関節の動的アライメントの分類指標とし、この足関節の動的アライメントを5つに分類する場合には、例えば、その閾値として、面積率(X)が15%未満(X<15)の場合を「オーバープロネーション」、面積率(X)が15%以上25%以下(15≦X≦25)の場合を「オーバープロネーション又はニュートラル」、面積率(X)が25%を越え40%未満(25<X<40)の場合を「ニュートラル」、面積率(X)が40%以上50%以下(40≦X≦50)の場合を「ニュートラル又はアンダープロネーション」、面積率(X)が50%を越える場合(X>50)を「アンダープロネーション」と設定するようにしてもよい。
【0071】
また、基準線Mと圧力中心との間隔の最大値Lを被測定者の足の大きさに応じた量で除した値(Y)を足関節の動的アライメントの分類指標とし、この足関節の動的アライメントを5つに分類する場合には、その閾値として、例えば、この値(Y)が、3%未満(Y<3)の場合を「オーバープロネーション」、この値(Y)が3%以上5%以下の場合を「オーバープロネーション又はニュートラル」、この値(Y)が5%を越え8%未満(5<Y<8)の場合を「ニュートラル」、この値(Y)が8%以上10%以下(8≦Y≦10)の場合を「ニュートラル又はアンダープロネーション」、この値(Y)が10%を越える場合(Y>10)を「アンダープロネーション」と設定するようにしてもよい。
【0072】
上記の実施形態では、評価システムとして、基準線Mと圧力中心の軌跡Nを表示可能な表示装置3を備えたものを例示したが、表示装置3を使用せずに、演算結果(評価結果)を演算装置2が音や表示灯の点灯など、種々の方法で通知できるような構成とされていてもよい。
【0073】
上記の実施形態では、演算装置2によって基準線Mを圧力分布図Fと重なるように設定した例を示したが、この基準線Mは、圧力分布図Fと重ならずに、所定の距離で圧力分布図Fから離れた位置に設定されてもよい。また、上記の実施形態では、基準線Mは、圧力分布図Fに表れた足の第2趾の端部Faと踵の端部Fbを通るように設定されていたが、これに限らず、任意の傾斜角度で設定されていてもよい。
【0074】
上記の実施形態では、評価システムの分類のための面積率の閾値として、面積率(X)が25%未満(X<25)の場合がオーバープロネーションとし、面積率(X)が25%以上50%未満(25≦X<50)の場合がニュートラル、面積率(X)が50%以上(X≧50)の場合がアンダープロネーションとした例を示したが、これらの値に限られない。
【0075】
また、上記の実施形態では、評価システムの分類のための指標として、この基準線Mと圧力中心の軌跡Nとの間隔の最大値Lを、被測定者の足の大きさに応じた量(例えば、足の長さα)で除した値Y(Y=(L/α)×100(%))を示し、その閾値として、この値Yが4%未満(Y<4)の場合をオーバープロネーションとし、この値Yが4%以上8%未満(4≦Y<8)の場合をニュートラル、この値Yが8%以上(Y≧8)の場合をアンダープロネーションに分類した例を示したが、これらの値に限られない。
【0076】
上記の実施の形態では、測定装置1、演算装置2、表示装置3が別体とされた評価システムを例示したが、これに限らず、評価システムは、測定装置1に演算装置2が組み込まれて一体とされたものや、測定装置1に演算装置2および表示装置3が組み込まれて一体とされたものであってもよい。また、記憶装置4は、演算装置2内に組み込まれて一体とされていてもよい。
【0077】
また、評価システムは、圧力中心の軌跡Nの曲率半径に基づいて、足関節の動的アライメントの分類を行うことができる。すなわち、演算装置2は、圧力中心の軌跡Nが曲線状で示される場合に、その曲率半径を演算できるようになっている。演算装置2は、この曲率半径を演算によって求めるとともに、その結果を、予め設定されている閾値(基準)に基づいて、オーバープロネーション、ニュートラル、アンダープロネーションのいずれかに分類することができる。
【0078】
また、演算装置2によって圧力中心の軌跡の長さ(軌跡長)を演算し、予め設定された基準(例えば閾値)にも基づいて、足関節の動的アライメントの分類(オーバープロネーション、ニュートラル、アンダープロネーションの分類)を行うようにしてもよい。
また、上記の実施形態では、測定装置1が所定の時間(17msec)で1フレームの測定を行い、所定のフレーム数(約30フレーム)の測定を行っていたが、測定装置1の1フレームの測定時間、およびフレーム数は適宜変更・調整が可能である。
【0079】
また、上記の実施形態では、被測定者が走歩行動作を行った場合の足裏の圧力分布を測定装置1によって測定し、この圧力分布のデータに基づいて、圧力中心および圧力中心の軌跡Nを演算装置2によって演算していたが、これに限らず、被測定者が走歩行動作を行ったときの足裏の荷重分布を測定装置によって測定し、この荷重分布のデータに基づいて荷重中心(Center Of Force(COF))および荷重中心の軌跡を演算装置によって演算し、その荷重中心と基準線Mとの逸脱量を予め定められた基準(例えば閾値)に基づいて足関節の動的アライメントの評価を行うようにしてもよい。この場合には、上記の実施形態で示した圧力中心の計算式を応用して荷重中心の位置を演算装置2によって演算することができる。
【0080】
また、上記の実施形態では、基準線と圧力中心の軌跡とがなす領域の面積を求める場合に、第1領域9の面積(A1)から第2領域10の面積(A2)を引いた値(A1−A2)を逸脱量(面積)としていたが、第1領域9の面積(A1)と第2領域10の面積(A2)との和(A1+A2)を被測定者の足の大きさに応じた量で除した値を面積率として用いてもよい。または、第1領域9の面積(A1)と第2領域10の面積(A2)を比較して面積の大きい方を被測定者の足の大きさに応じた量で除した値を面積率として用いてもよい。
【0081】
また、上記の実施形態では、基準線Mと圧力中心との間隔の最大値Lは、基準線Mを挟んで左右方向の一方側(左側)に位置する軌跡の部分において、基準線Mから最も離れた圧力中心の軌跡Nの位置B1における基準線Mからの距離L1と、基準線Mの他方側(右側)に位置する圧力中心の軌跡Nの部分において基準線Mから最も離れた位置B2における基準線Mからの距離L2との和(L1+L2)であったが、これに限らず、前記距離L1と距離L2を比較して大きい方の値を、基準線Mと圧力中心の間隔の最大値Lとしてもよい。さらに、この基準線Mと圧力中心との間隔の最大値Lには、前記距離L1と距離L2の差(L1−L2)を用いることもできる。
【図面の簡単な説明】
【0082】
【図1】本発明に係る足関節の動的アライメントの評価システムの概略図である。
【図2】足関節の動的アライメントの評価システムにおける測定装置を示す斜視図である。
【図3】足関節の動的アライメントの評価システムにおける表示装置に表示された圧力分布図である。
【図4】基準線と圧力中心の軌跡を示す図である。
【図5】足関節の動的アライメントの評価システムによる足関節の動的アライメントの評価に係るフローチャートである。
【図6】表示装置に表示される足関節の動的アライメントの演算結果の例である。
【図7】オーバープロネーションを説明するための足の関節まわりの背面図である。
【図8】ニュートラルを説明するための足の関節まわりの背面図である。
【図9】アンダープロネーションを説明するための足の関節まわりの背面図である。
【符号の説明】
【0083】
1…測定装置、2…演算装置、3…表示装置、4…記憶装置、M…基準線、N…圧力中心の軌跡
【特許請求の範囲】
【請求項1】
踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする足関節の動的アライメントの評価システム。
【請求項2】
前記逸脱量は、基準線と圧力中心の軌跡とがなす領域の面積として演算される請求項1に記載の足関節の動的アライメントの評価システム。
【請求項3】
前記逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類する請求項2に記載の足関節の動的アライメントの評価システム。
【請求項4】
前記逸脱量は、基準線と圧力中心の軌跡との間隔の最大値として演算される請求項1に記載の足関節の動的アライメントの評価システム。
【請求項5】
前記逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類する請求項4に記載の足関節の動的アライメントの評価システム。
【請求項6】
前記圧力中心の軌跡と基準線を表示可能な表示装置を備える請求項1から5のいずれか1項に記載の足関節の動的アライメントの評価システム。
【請求項7】
前記演算装置は、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する請求項3に記載の足関節の動的アライメントの評価システム。
【請求項8】
前記演算装置は、逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する請求項5に記載の足関節の動的アライメントの評価システム。
【請求項9】
踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の時間ごとに測定装置で測定し、各時間に測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定し、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算装置で演算することを特徴とする足関節の動的アライメントの評価方法。
【請求項10】
踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の荷重分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された荷重分布の荷重中心の位置を演算し、演算された荷重中心の位置に基づいて、一連の走歩行動作における荷重中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記荷重中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする足関節の動的アライメントの評価システム。
【請求項1】
踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする足関節の動的アライメントの評価システム。
【請求項2】
前記逸脱量は、基準線と圧力中心の軌跡とがなす領域の面積として演算される請求項1に記載の足関節の動的アライメントの評価システム。
【請求項3】
前記逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類する請求項2に記載の足関節の動的アライメントの評価システム。
【請求項4】
前記逸脱量は、基準線と圧力中心の軌跡との間隔の最大値として演算される請求項1に記載の足関節の動的アライメントの評価システム。
【請求項5】
前記逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を基に足関節の動的アライメントを分類する請求項4に記載の足関節の動的アライメントの評価システム。
【請求項6】
前記圧力中心の軌跡と基準線を表示可能な表示装置を備える請求項1から5のいずれか1項に記載の足関節の動的アライメントの評価システム。
【請求項7】
前記演算装置は、逸脱量としての前記面積を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する請求項3に記載の足関節の動的アライメントの評価システム。
【請求項8】
前記演算装置は、逸脱量としての基準線と圧力中心との間隔の最大値を被測定者の足の大きさに応じた量で除した値を、予め設定された基準に基づいてオーバープロネーション、ニュートラル、アンダープロネーションのいずれか1つに分類する請求項5に記載の足関節の動的アライメントの評価システム。
【請求項9】
踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の圧力分布を所定の時間ごとに測定装置で測定し、各時間に測定された圧力分布の圧力中心の位置を演算し、演算された圧力中心の位置に基づいて、一連の走歩行動作における圧力中心の軌跡を決定し、踵側から爪先側にかけて設定される直線状の基準線に対する前記圧力中心の軌跡の逸脱量を演算装置で演算することを特徴とする足関節の動的アライメントの評価方法。
【請求項10】
踵から爪先にかけて足の裏を順次接地させる態様で行われる走歩行動作を被測定者が行った際の荷重分布を所定の測定時間ごとに測定する測定装置と、測定時間ごとに測定された荷重分布の荷重中心の位置を演算し、演算された荷重中心の位置に基づいて、一連の走歩行動作における荷重中心の軌跡を決定するとともに、踵側から爪先側にかけて設定される直線状の基準線に対する前記荷重中心の軌跡の逸脱量を演算する演算装置とを備えることを特徴とする足関節の動的アライメントの評価システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−11527(P2009−11527A)
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願番号】特願2007−175922(P2007−175922)
【出願日】平成19年7月4日(2007.7.4)
【出願人】(000000310)株式会社アシックス (57)
【Fターム(参考)】
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願日】平成19年7月4日(2007.7.4)
【出願人】(000000310)株式会社アシックス (57)
【Fターム(参考)】
[ Back to top ]