
足首インピーダンスの測定装置
【課題】正確に足首インピーダンス(弾性係数と粘性係数)を求めることができる、新規な測定装置を得る。
【解決手段】本発明は、座位姿勢における被験者2の足首インピーダンスの測定装置に関する。この測定装置は、被験者2の足先2aが載せられるフットプレート10と、フットプレート10上に足先2aを固定する足先固定具11と、前後方向、左右方向、上下方向の第1〜第3の回転軸30・50・70のまわりにフットプレート10を揺動回転させる第1〜第3の駆動部12〜14と、フットプレート10の角度を検出する角度検出手段15とを備える。各駆動部12〜14は、フットプレート10に駆動回転力を付与する駆動源38・58・78と、伝動機構39・59・79とを備える。回転軸30・50・70のそれぞれにトルク検出手段40・60・80を設ける。
【解決手段】本発明は、座位姿勢における被験者2の足首インピーダンスの測定装置に関する。この測定装置は、被験者2の足先2aが載せられるフットプレート10と、フットプレート10上に足先2aを固定する足先固定具11と、前後方向、左右方向、上下方向の第1〜第3の回転軸30・50・70のまわりにフットプレート10を揺動回転させる第1〜第3の駆動部12〜14と、フットプレート10の角度を検出する角度検出手段15とを備える。各駆動部12〜14は、フットプレート10に駆動回転力を付与する駆動源38・58・78と、伝動機構39・59・79とを備える。回転軸30・50・70のそれぞれにトルク検出手段40・60・80を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、足首のインピーダンス(足首の粘弾性係数)を測定するための測定装置に関する。
【背景技術】
【0002】
本発明に係る測定装置は、足首の弾性係数および粘性係数などのインピーダンスを測定することを目的とするが、足首の弾性係数を測定する装置自体は、非特許文献1、2などに開示されており公知である。
【0003】
非特許文献1に記載の測定装置では、倒立振り子に連結されて、水平軸まわりに揺動可能に構成されたフットプレート上に被験者を立たせたうえで、被験者に所定のトルクの発生を求め、さらに倒立振り子を所定角度に倒すように求める。そして、測定されたトルクと角度から足首の弾性係数を算出している。
【0004】
非特許文献2に記載の測定装置では、サーボモータに連結されて、水平軸まわりに揺動可能に構成されたフットプレート上に被験者を立たせたうえで、所定角度範囲(−0.5°〜+0.5°)で被験者の足先が上下動するようにフットプレートを駆動揺動させる。つまり、非特許文献2に記載の装置では、上記角度範囲に対応した短周期(1秒)のパルスをサーボモータに与えて、被験者の足先にパルス刺激を与えており、測定後の床反力(フットプレートに対する反力)の加わる圧の中心位置(COP)と足首との距離を測定し、COPの位置からトルクを算出し、さらに足首の弾性係数を算出している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】Loram.D and LakieM,"Direct measurement of human ankle stiffness during quiet standing:The intrinsic mechanical stiffness is insufficient for stability.",Journal of Physiology,545.3,pp.1041-1053(2002)
【非特許文献2】Casadio M,Morasso P and Sanguineti V,"Direct measurement of ankle stiffness during quiet standing: implications for control modering and clinical application",Gait&posture,21pp.410-424(2004)
【発明の概要】
【発明が解決しようとする課題】
【0006】
これら非特許文献1、2に開示された測定装置では、静止立位姿勢の身体動揺は、倒立振り子の運動と同等であるという見解に基づき、フットプレート上に立たせた被験者に対して測定を行い、その測定結果から足首の弾性係数を求めている。しかし、このように被験者を立位姿勢としたうえで測定を行う方法では、足首により全身の体重が受け止められた状態で測定を行うため、得られた弾性係数が全身の関節等による力の影響を受けて、真に純粋な足首を中心とした弾性係数を得ることは不可能であった。すなわち、非特許文献1、2に開示された測定装置では、得られた弾性係数の値が、被験者の体重、或いは平衡を保つための被験者の全身の関節や筋力を使った体重移動など、種々の要因により左右されやすく、正確に足首の弾性係数の値を得ることは困難であった。
【0007】
加えて、足首を含む人間の骨格筋は、非常に大きな力を発生させることが可能なアクチュエータと考えることができ、しかも単に力を発生させるだけではなく、バネ、ダンパのような粘弾性も併せ持っている。このことは、骨格筋を活動させると筋は硬くなり、逆に力を抜いてリラックスすると柔らかくなることからも明らかである。従って、例えば立位姿勢時における身体平衡維持のメカニズム解明には、足首の弾性係数のみならず、足首の粘性係数についても勘案することが必要であるが、上記非特許文献1では、弾性係数のみを測定しており、粘性係数の測定には至っておらず、その点にも改良の余地があった。また、上記非特許文献2においても、粘性に着目はしているものの立位において測定しており上体の影響を考慮しておらず、その点に改良の余地があった。
【0008】
本発明は、以上のような従来の測定装置の抱える問題を解決するためになされたものであり、より正確に弾性係数および粘性係数(以下、これら粘弾性係数をインピーダンスと記す。)を求めることができる、新規な足首インピーダンスの測定装置を得ることを目的とする。
【課題を解決するための手段】
【0009】
本発明者等は、被験者を座位姿勢としたうえで測定を行えば、より正確に足首のトルクの測定が可能であり、加えて、測定された足首のトルクに基づいて、より正確に足首の弾性係数のみならず、粘性係数の計測が可能となることを見出して、本発明を完成するに至った。
【0010】
すなわち本発明は、足首インピーダンスの測定装置を対象とする。この測定装置は、着座姿勢における被験者2の足先2aが載せられるフットプレート10と、フットプレート10上に載せられた被験者2の足先2aを固定するための足先固定具11と、前後方向に延びる第1回転軸30まわりにフットプレート10を揺動回転させる第1駆動部12と、左右方向に延びる第2回転軸50まわりにフットプレート10を揺動回転させる第2駆動部13と、上下方向に延びる第3回転軸70まわりにフットプレート10を揺動回転させる第3駆動部14と、揺動回転時のフットプレート10の角度を検出するための角度検出手段15とを備える。各駆動部12・13・14は、回転軸30・50・70を介してフットプレート10に駆動回転力を付与する駆動源38・58・78と、駆動源38・58・78の駆動力を回転軸30・50・70に伝える伝動機構39・59・79とを備える。回転軸30・50・70のそれぞれに、フットプレート10の揺動回転時に回転軸30・50・70に作用するトルクを検出するためのトルク検出手段40・60・80を設ける。そして、被験者2の踝2bが各回転軸30・50・70の軸心上に位置するように、足先固定具11で被験者2の足先2aを固定し、かかる足先2aの固定状態で、駆動源38・58・78を駆動してフットプレート10を回転軸30・50・70まわりに揺動回転駆動して、足先2aを強制的に姿勢変位させ、足先2aを姿勢変位させた際のトルク検出手段40・60・80による検出値と、角度検出手段15による検出値に基づいて、足首の粘弾性係数を算出することを特徴とする。なお、本明細書および特許請求の範囲において、前後、左右、上下の各方向は、フットプレート10に足先2aを載せた状態の被験者2から見た方向を意味する。
【0011】
被験者2の一方の脚の足先2aをフットプレート10に載せて、当該一方の脚の足首インピーダンスを測定する構成を採ることができる。
【0012】
角度検出手段は、フットプレート10に設けたジャイロセンサ15で構成することができる。
【0013】
具体的には、足先固定具11は、フットプレート10上に載せられた被験者2の足先2aを包む固定バッグ22と、固定バッグ22に接続された吸引手段24とを備える。固定バッグ22は、内部に気密空間を有するバッグ本体25と、バッグ本体25の気密空間内に収納された多数のビーズ26とを備える。被験者2の足先2aを固定バッグ22で包んでから、吸引手段24でバッグ本体25の気密空間内の空気を抜くことにより、固定バッグ22を足先2aに密着した状態で保形させて、足先2aをフットプレート10に固定する。
【発明の効果】
【0014】
本発明によれば、下肢の筋肉が力を発揮していない座位状態で足首のインピーダンスを計測するので、従来の非特許文献1、2に記載の計測装置に比べて、より正確に足首のトルクを計測し、該トルクから足首の粘弾性係数を的確に得ることができる。すなわち、人は立位状態で姿勢を維持しようとすると、脚部だけでなく、身体全体を用いてバランスを取ろうとする。その為、非特許文献1、2に記載の計測装置のように、立位姿勢で足首のトルクを測定するものでは、得られた値は、他の関節、特に上半身の関節の影響を受けた値となることが避けられない。これに対して、本発明のように被験者を座位姿勢にしたうえで計測を行うと、上半身による姿勢を維持しようとする要因を完全に排除することができるため、より正確に足首の粘弾性係数を計測することができる。また、高齢者や治療中の患者に対して、立位姿勢で足首のインピーダンスを測定することは被験者の負担が大きく、そもそも測定自体が困難となるおそれがあるが、本発明に係る装置を用いれば、座位姿勢で測定を行うことができるため、被験者の負担を大きく軽減することができる。
【0015】
被験者2の足先2aをフットプレート10に載せたときに、被験者2の踝2bが、フットプレート10の揺動回転中心となる各回転軸30・50・70の軸心とずれていると、フットプレート10の回転に伴って、足の踵の位置が前後にずれる。このため、被験者2の下腿部が揺れ動くことが避けられず、下腿部の筋力が足先2aを介してフットプレート10に加わり(下肢の筋肉が力を発揮し)、正確に足首の粘弾性係数を測定することが困難となる。これに対して、本発明のように、被験者2の踝2bを各回転軸30・50・70の軸心上に位置させていると、フットプレート10の回転に伴って被験者2の下腿部が動くことは無く、該下腿部の筋力(下肢の筋力)の影響を排除して、より正確に足首の粘弾性係数を測定することができる。
【0016】
以上のような本発明に係る計測装置によって計測された足首の粘弾性係数は、例えば、高齢者の転倒事故の防止等に貢献し得る極めて有用な情報として利用することができる。すなわち、身体の各部位を異なった速さで動かすと、重心の位置は刻一刻と変化するが、それにもかかわらずバランスを崩すことなく立っていられるのは平衡機能の働きによるものである。この平衡機能は、高齢になると平常に働かなくなり、高齢者(総務省で定義されている65歳以上の方を示す)における転倒の主な原因となっている。また、平衡機能は、身体を支える支点となる足圧中心(center of presser:COP)の動きにより管理されており、足首のインピーダンス(粘弾性)特性によって大きな影響を受ける。従って、足首の粘弾性係数を正確に計測することができれば、被験者の平衡機能の低下度合いの推測が可能となり、転倒事故等の発生を未然に防ぐことが可能となる。また、足首の粘弾性係数を正確に計測することができれば、医学的リハビリテーションの現場において、平衡機能の回復具合を定量的に評価することも可能となる。
【0017】
また本発明では、前後方向に延びる第1回転軸30と、左右方向に延びる第2回転軸50と、上下方向に延びる第3回転軸70とのまわりに、フットプレート10を揺動回転させることができる。しかも、第1〜第3の回転軸30・50・70に対応する第1〜第3の駆動部12〜14を、駆動源38・58・78および伝動機構39・59・79で独立に駆動させて、各回転軸30・50・70まわりの駆動回転力をフットプレート10に対して独立に付与することができる。さらに、回転軸30・50・70のそれぞれにトルク検出手段40・60・80を設けたので、フットプレート10の揺動回転時に各回転軸30・50・70に作用するトルクを個別に検出することができる。従って、本発明によれば、前後方向の回転軸まわりの足首のインピーダンスと、左右方向の回転軸まわりの足首のインピーダンスと、上下方向の回転軸まわりの足首のインピーダンスという、3方向の足首のインピーダンスを一つ測定装置で測定することができる。一回のフットプレートへの足の固定作業で、3方向のインピーダンスの測定が可能であり、迅速に測定作業を進めることができる点でも優れている。
【0018】
水平な回転軸を1つだけ持つ測定装置でも、被験者(足先)に対して測定装置(フットプレート)を90°回転させれば、フットプレートを前後軸まわりに揺動回転させる測定と、左右軸まわりに揺動回転させる測定とを行うことはできるが、一度フットプレートから足先を離し、被験者もしくは測定装置を移動させてから、再度足先をフットプレートに固定するという手間が生じる。その点、本発明に係る測定装置によれば、前後方向に延びる第1回転軸30と、左右方向に延びる第2回転軸50とを個別に備えるので、フットプレート10に足先2aを固定したまま、フットプレート10を前後軸まわりに揺動回転させる測定と、左右軸まわりに揺動回転させる測定とを続けて行うことができる。
【0019】
被験者2の一方の脚の足先2aをフットプレート10に載せて、当該一方の脚の足首インピーダンスを測定する測定装置によれば、左右の脚の足首インピーダンスが異なる場合に、左右それぞれの足首インピーダンスを正確に測定することができる。すなわち、一方の足首が曲がりやすく、他方の足首が曲がりにくい被験者2の両足をフットプレート10に載せると、フットプレート10を揺動させるときに、曲がりにくい足首が大きな抵抗となるため、曲がりやすい足首のインピーダンスを正確に測定することはできない。これに対して本発明のように、一方の足先2aだけをフットプレート10に載せるようにすると、一方の脚の足首インピーダンスを測定する際に、他方の脚の影響を排除して、正確な測定を行うことができる。
【0020】
フットプレート10の角度検出手段を、フットプレート10に設けたジャイロセンサ15で構成すると、第1〜第3の回転軸30・50・70のいずれのまわりにフットプレート10を揺動させた場合にも、1つのジャイロセンサ15だけでフットプレート10の角度を測定することができる。ジャイロセンサ15を用いると、各回転軸30・50・70に角度検出手段を設ける場合に比べて、コストを削減することができる。
【0021】
気密空間にビーズ26が収納されたバッグ本体25で固定バッグ22を構成し、気密空間内の空気を吸引手段24で排除して、足先2aをフットプレート10に固定する足先固定具11によれば、フットプレート10上における足先2aの位置調整が容易となり、しかも、調整後の位置で足先2aを確りと固定することが可能となる。すなわち、吸引手段24で空気を吸引する前の固定バッグ22は、足先2aの動きに合わせて容易に変形するので、足先2aを固定バッグ22で包んでから足先2aを動かして、踝2bを各回転軸30・50・70の軸心上に位置させることができる。足先2aの位置を調整した後、バッグ本体25の気密空間内の空気を抜くと、固定バッグ22が足先2aに密着し、さらに、気密空間内のビーズ26どうしが密着して、固定バッグ22が密着姿勢で保形されるので、足先2aを調整後の位置に確りと固定することができる。このように、被験者2の踝2bが各回転軸30・50・70の軸心上に位置する状態で、足先2aを確りと固定できると、足首インピーダンスの測定精度を向上することができる。また、本発明に係る足先固定具11は、被験者2の足先2aのサイズとは無関係に適用することができるので、足先2aのサイズごとに足先固定具を用意する場合に比べてコストを削減することができる。
【図面の簡単な説明】
【0022】
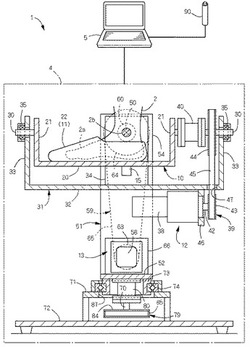
【図1】本発明の足首インピーダンスの測定装置の装置本体の縦断側面図である。
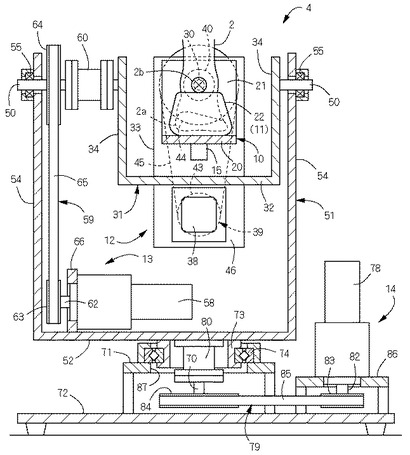
【図2】測定装置の縦断正面図である。
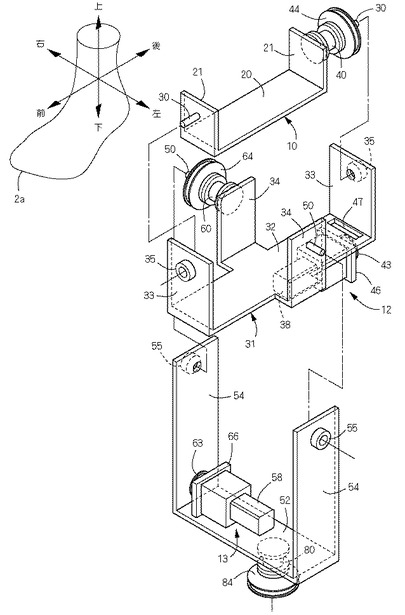
【図3】測定装置の一部の分解斜視図である。
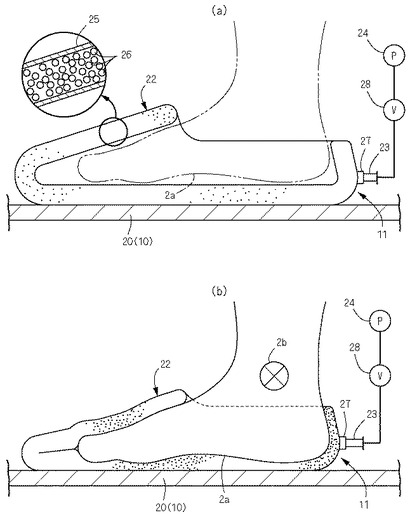
【図4】足先固定具の使用方法を説明するための図であり、(a)が足先の固定前、(b)が足先の固定後を示している。
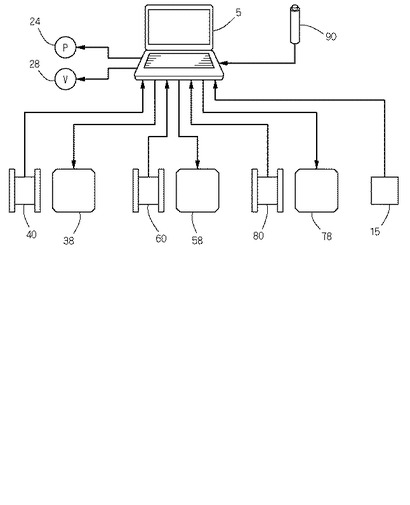
【図5】本発明の測定装置の回路構成を説明するためのブロック図である。
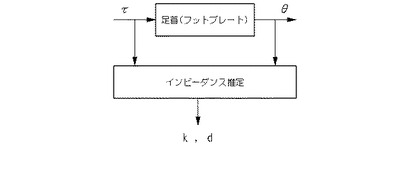
【図6】足首インピーダンスの算出方法を模式的に示す図である。
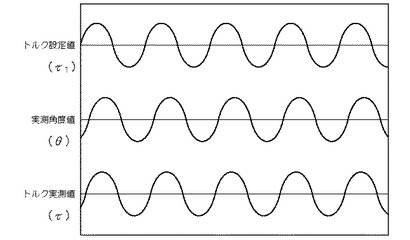
【図7】トルクの設定値、実測角度値、およびトルクメータの実測値の経時的変化を説明するための図である。
【図8】インピーダンス測定モデルを示す図である。
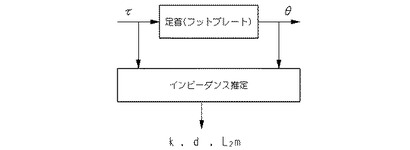
【図9】別の足首インピーダンスの算出方法を模式的に示す図である。
【発明を実施するための形態】
【0023】
(実施例) 本発明に係る足首インピーダンスの測定装置について、図1乃至図5を参照して詳細に説明する。本実施例に係る測定装置1は、被験者が座った状態で、弾性係数(k)および粘性係数(d)といった、被験者の足首のインピーダンス(粘弾性係数)を測定するものである。図1に示すように測定装置1は、装置本体4と、装置本体4を制御する制御部5とで構成される。装置本体4は、被験者2の足先2aが載せられるフットプレート10と、フットプレート10上に載せられた足先2aを固定するための足先固定具11と、フットプレート10を揺動回転させる第1〜第3の駆動部12〜14と、揺動回転時のフットプレート10の角度を検出するためのジャイロセンサ(角度検出手段)15などで構成される。制御部5はパーソナルコンピュータなどで構成される。なお、上述のように、本実施例における前後、左右、上下の各方向は、フットプレート10に足先2aを載せた状態の被験者2から見た方向を意味し、その方向を図3に示す。
【0024】
図1および図3に示すようにフットプレート10は、被験者2の足裏が接する前後に長い矩形板状の底壁20と、底壁20の前後端に立設された前後側壁21・21とを備える逆門形に形成されており、底壁20の下面にジャイロセンサ15が取り付けられている。本実施例に係る測定装置1は、被験者2の足首のインピーダンスを左右別々に測定するものであり、フットプレート10には左右一方の足先2aだけが載せられる。底壁20の前後寸法は40cm、左右寸法は15cmに設定されている。
【0025】
図4に示すように足先固定具11は、フットプレート10の底壁20上で足先2aを包む固定バッグ22と、固定バッグ22にチューブ23を介して接続された真空ポンプ(吸引手段)24とを備える。固定バッグ22は、ポリウレタンシートなどで構成されて内部に気密空間を有するバッグ本体25と、バッグ本体25の気密空間内に収納された多数の合成樹脂製のビーズ26とを備える。バッグ本体25の一個所には、バッグ本体25の気密空間とチューブ23とを連通する吸引口27が設けられており、チューブ23における吸引口27と真空ポンプ24の間にはバルブ28が設けられている。
【0026】
被験者2の足先2aをフットプレート10に固定するときは、図4(a)に示すように足先2aを固定バッグ22で包んでから、真空ポンプ24でバッグ本体25の気密空間内の空気を抜き、バルブ28を閉じる。これにより、図4(b)に示すように固定バッグ22が足先2aに密着し、さらに、バッグ本体25内のビーズ26どうしが密着して、固定バッグ22が足先2aに密着した姿勢で保形されるので、足先2aをフットプレート10に固定することができる。なお、被験者2の踝2bは、固定バッグ22で覆うことなく露出させるようにする。
【0027】
図1および図3に示すようにフットプレート10は、前後方向に延びる一対の第1回転軸30・30を介して、第1支持枠31で支持されている。つまり、フットプレート10は、その上面が右斜め上方向に指向する右傾斜姿勢と、その上面が左斜め上方向に指向する左傾斜姿勢との間で、第1回転軸30・30のまわりに揺動回転可能に構成されている。第1支持枠31は、フットプレート10の下方に配置された前後に長い板状の底壁32と、底壁32の前後端に立設された前後側壁33・33と、底壁32の左右端の前後方向中途部に立設された左右側壁34・34とを備える。第1回転軸30の一端(基端)はフットプレート10の前後側壁21に固定されており、第1回転軸30の他端(突端)は、第1支持枠31の前後側壁33に設けた軸受35で回転自在に支持されている。
【0028】
前後一方(本実施例では後側)の第1回転軸30に、フットプレート10を第1回転軸30のまわりに揺動回転させるための第1駆動部12が連結されている。図1に示すように第1駆動部12は、ギヤードモータ(駆動源)38と、ギヤードモータ38の駆動力を第1回転軸30に伝える伝動機構39とを備える。伝動機構39は、ギヤードモータ38の出力軸42に固定された原動プーリ43と、第1回転軸30に固定された従動プーリ44と、両プーリ43・44の間に巻き掛けられたタイミングベルト45とで構成される。ギヤードモータ38の駆動力は、出力軸42から原動プーリ43、タイミングベルト45、および従動プーリ44を順に介して、第1回転軸30へ伝達される。ギヤードモータ38は、第1支持枠31の底壁32の下面に立設した取付板46で支持されている。底壁32には、タイミングベルト45を挿通するための通口47が形成されている。
【0029】
第1回転軸30におけるフットプレート10の後側壁21と従動プーリ44との間に、トルクメータ(トルク検出手段)40が配置されている。ギヤードモータ38を駆動して第1回転軸30まわりにフットプレート10を揺動回転させたときに、第1回転軸30に作用するトルクを、トルクメータ40で計測することができる。
【0030】
図2および図3に示すように第1支持枠31は、左右方向に延びる一対の第2回転軸50・50を介して、第2支持枠51で支持されている。つまり、第1支持枠31は、第2支持枠51に対して第2回転軸50・50のまわりに揺動回転させることができる。第1支持枠31を第2回転軸50のまわりに揺動回転させると、フットプレート10が第1支持枠31と一体に揺動回転する。つまり、フットプレート10は、その上面が前方上方向に指向する前傾斜姿勢と、その上面が後方上方向に指向する後傾斜姿勢との間で、第2回転軸50・50のまわりに揺動回転可能に構成されている。第2支持枠51は、第1支持枠31の下方に配置された左右に長い矩形板状の底壁52と、底壁52の左右端に立設された左右側壁54・54とを備える。第2回転軸50の一端(基端)は第1支持枠31の左右側壁34に固定されており、第2回転軸50の他端(突端)は、第2支持枠51の左右側壁54に設けた軸受55で回転自在に支持されている。
【0031】
左右一方(本実施例では右側)の第2回転軸50に、第1支持枠31を第2回転軸50のまわりに揺動回転させるための第2駆動部13が連結されている。図2に示すように第2駆動部13は、ギヤードモータ(駆動源)58と、ギヤードモータ58の駆動力を第2回転軸50に伝える伝動機構59とを備える。伝動機構59は、ギヤードモータ58の出力軸62に固定された原動プーリ63と、第2回転軸50に固定された従動プーリ64と、両プーリ63・64の間に巻き掛けられたタイミングベルト65とで構成される。ギヤードモータ58の駆動力は、出力軸62から原動プーリ63、タイミングベルト65、および従動プーリ64を順に介して、第2回転軸50へ伝達される。ギヤードモータ58は、第2支持枠51の底壁52の上面に立設した取付板66で支持されている。
【0032】
第2回転軸50における第1支持枠31の右側壁34と従動プーリ64との間に、トルクメータ(トルク検出手段)60が配置されている。ギヤードモータ58を駆動して、第2回転軸50まわりに第1支持枠31をフットプレート10と一体に揺動回転させたときに、第2回転軸50に作用するトルクを、トルクメータ60で計測することができる。
【0033】
図2に示すように第2支持枠51は、上下方向に延びる第3回転軸70と連結されており、水平姿勢で配置された矩形板状のテーブル71で下側から支持されている。つまり、第2支持枠51は、テーブル71に対して第3回転軸70のまわりに揺動回転させることができる。第2支持枠51を第3回転軸70のまわりに揺動回転させると、第1支持枠31およびフットプレート10が第2支持枠51と一体に揺動回転する。換言すれば、つまり、フットプレート10は、水平姿勢を維持したままで、その前端が時計方向に回転された右回転姿勢と、その前端が反時計方向に回転された左回転姿勢との間で、第3回転軸70まわりに揺動回転可能に構成されている。
【0034】
テーブル71は、床面に載置されたベース72の上面側に固定されている。第2支持枠51の底壁52の下面側には、円筒状の連結ボス73が固定されており、この連結ボス73の中心軸線は第3回転軸70の軸心と一致する。テーブル71の上面と連結ボス73の外周面とが、上下方向を回転軸方向とするベアリング74で連結されている。つまり、第2支持枠51は、テーブル71に対して相対回転自在に、ベアリング74を介してテーブル71で支持されている。ここでのベアリング74は、回転軸方向に働く力を受け止めるスラストベアリングである。
【0035】
第3回転軸70の上端(基端)は、第2支持枠51の底壁52の下面に連結固定されている。第3回転軸70の下端(突端)に、第2支持枠51を第3回転軸70のまわりに揺動回転させるための第3駆動部14が連結されている。第3駆動部14は、ギヤードモータ(駆動源)78と、ギヤードモータ78の駆動力を第3回転軸70に伝える伝動機構79とを備える。伝動機構79は、ギヤードモータ78の出力軸82に固定された原動プーリ83と、第3回転軸70に固定された従動プーリ84と、両プーリ83・84の間に巻き掛けられたタイミングベルト85とで構成される。ギヤードモータ78の駆動力は、出力軸82から原動プーリ83、タイミングベルト85、および従動プーリ84を順に介して、第3回転軸70へ伝達される。ギヤードモータ78は、テーブル71の上面側に水平姿勢で固定した取付板86で支持されている。
【0036】
第3回転軸70における第2支持枠51の底壁52と従動プーリ84との間に、トルクメータ(トルク検出手段)80が配置されている。ギヤードモータ78を駆動して、第3回転軸70まわりに第2支持枠51を第1支持枠31およびフットプレート10と一体に揺動回転させたときに、第3回転軸70に作用するトルクを、トルクメータ80で計測することができる。テーブル71の中央には、第3回転軸70およびトルクメータ80を挿通するための通口87が形成されており、従動プーリ84はテーブル71とベース72の間に配されている。
【0037】
図5は、本実施例に係る測定装置1の回路構成を示すブロック図である。この測定装置1は、制御部5からの信号により、足先固定具11の真空ポンプ24およびバルブ28を操作して、被験者2の足先2aをフットプレート10に固定するとともに、各駆動部12〜14のギヤードモータ38・58・78を駆動して、フットプレート10を揺動操作する。後述する本実施例に係る測定方法では、第1駆動部12、第2駆動部13、第3駆動部14の順で、各ギヤードモータ38・58・78を個別に駆動する。また、この制御部5には、フットプレート10の揺動操作時において、各駆動部12〜14のトルクメータ40・60・80により検出されたトルクに関する検出結果、およびジャイロセンサ15により検出されたフットプレート10の角度に関する検出結果が送り込まれる。また制御部5は、トルクや角度の検出結果に基づいて、被験者2の足首の粘弾性係数を算出する。
【0038】
制御部5を構成するパーソナルコンピュータには、非常停止ボタン90が接続されている。被験者2が危険を感じたときに非常停止ボタン90を押圧操作すると、ギヤードモータ38・58・78の駆動が即時に停止されて、フットプレート10の回転が直ちに停止されるようになっている。非常停止ボタン90を設けることにより、フットプレート10が過剰に揺動回転されることに起因して、被験者2が足首を痛めることを防ぐことができる。非常停止ボタン90が押圧操作されてフットプレート10の回転が停止した後、フットプレート10が初期角度姿勢へ戻る方向にギヤードモータ38・58・78を駆動させるようにすると、被験者2の足首に対する負荷が大きい危険な状態を迅速に脱することができる。また、非常停止ボタン90に加えて、各回転軸30・50・70の回転限界を機械的に規定する規制機構を設けると、フットプレート10の過剰な揺動回転を確実に防止して、被験者2にとっての安全性をさらに向上することができる。
【0039】
次に、上記構成からなる測定装置1を使った足首インピーダンスの測定方法について、図6乃至図8を参照して説明する。かかる測定方法は、トルク(τ)と角度(θ)の測定(測定工程)と、これらトルク(τ)と角度(θ)のサンプルデータから最小二乗法を使った足首インピーダンス(弾性係数:k、粘性係数:d)の算出(算出工程)とに大別できる。
【0040】
測定工程においては、被験者2を椅子などに座らせてから、被験者2の足先2aを足先固定具11でフットプレート10に固定する。このとき、被験者2の踝2bが各回転軸30・50・70の軸心上に在るように、フットプレート10上における被験者2の足先位置を調整する。なお、足先2aを固定するのに加えて、被験者2の下腿部を椅子などに固定してもよい。
【0041】
次に、フットプレート10を所定の初期角度姿勢とする。具体的には制御部5が、ジャイロセンサ15からの検出信号を勘案しながら、各駆動部12〜14のギヤードモータ38・58・78を駆動して、フットプレート10を初期角度姿勢となるまで揺動操作する。初期角度姿勢は、例えばフットプレート10および第1支持枠31の底壁20・32が水平で、かつ、第2支持枠51の底壁52がテーブル71に対して捻れていない状態(底壁52とテーブル71の上下縁どうし、および左右縁どうしが平行である状態)とする。
【0042】
次に、第1駆動部12のギヤードモータ38を駆動して、フットプレート10を第1回転軸30のまわりに揺動させながら、第1回転軸30に作用するトルク(τ)、およびフットプレート10の角度(θ)を、第1駆動部12のトルクメータ40とジャイロセンサ15で計測する。ここで、フットプレート10の角度(θ)とは、フットプレート10の底壁20が第1支持枠31の底壁32に対してなす角度のことをいう。
【0043】
具体的には、フットプレート10を、上記の初期角度姿勢から所定の角度範囲(例えば±15°)で、所定のトルク(τ1 )を加えながらゆっくりと揺動させる。フットプレート10が初期角度姿勢から所定の角度範囲(±15°)で揺動されたのちに初期角度姿勢に戻るまでの間を1周期とし、この1周期が例えば1秒以上の長周期となるように、フットプレート10を揺動させる。図7にトルク設定値(τ1 )、実測角度値(θ)、トルクメータ40によるトルク実測値(τ)の時間変化の例を示す。本測定装置1では、1周期において数回から数千回の測定を行うことができる。また、測定は、数周期〜数十周期に亘って実行される。
【0044】
上記測定が終了すると、フットプレート10を初期角度姿勢に戻してから、フットプレート10を第2回転軸50のまわりに揺動させる測定を開始する。すなわち、第2駆動部13のギヤードモータ58を駆動して、第1支持枠31をフットプレート10とともに第2回転軸50のまわりに揺動させながら、第2回転軸50に作用するトルク(τ)、およびフットプレート10の角度(θ)を、第2駆動部13のトルクメータ60とジャイロセンサ15で計測する。ここで、フットプレート10の角度(θ)とは、フットプレート10の底壁20が第2支持枠51の底壁52に対してなす角度のことをいう。トルク(τ)と角度(θ)の具体的な測定方法は、上記測定と同様であるため、その説明を省略する。
【0045】
上記測定が終了すると、フットプレート10を初期角度姿勢に戻してから、フットプレート10を第3回転軸70のまわりに揺動させる測定を開始する。すなわち、第3駆動部14のギヤードモータ78を駆動して、第2支持枠51を第1支持枠31およびフットプレート10とともに第3回転軸70のまわりに揺動させながら、第3回転軸70に作用するトルク(τ)、およびフットプレート10の角度(θ)を、第3駆動部14のトルクメータ80とジャイロセンサ15で計測する。ここで、フットプレート10の角度(θ)とは、フットプレート10の底壁20の上下縁(あるいは左右縁)がテーブル71の上下縁(あるいは左右縁)に対してなす角度のことをいう。トルク(τ)と角度(θ)の具体的な測定方法は、上記測定と同様であるため、その説明を省略する。
【0046】
以上のように、本実施例では、フットプレート10を前後方向に延びる第1回転軸30のまわりに揺動させる測定と、左右方向に延びる第2回転軸50のまわりに揺動させる測定と、上下方向に延びる第3回転軸70のまわりに揺動させる測定との3つを行うが、もちろん測定の順序は任意である。また、必ずしも3つの測定を行う必要は無い。
【0047】
次の算出工程では、得られた実測角度(θ)とトルク実測値(τ)の値から、最小二乗法を使って弾性係数(k)と粘性係数(d)とを推定する(図6参照)。図8は、左右方向に延びる第2回転軸50のまわりにフットプレート10を揺動させる測定におけるインピーダンス測定モデルである。第2回転軸50には、測定時において、第2支持枠51に設けた軸受55で支持される各部材(第1支持枠31、フットプレート10等)の総重量(Mg)に由来する慣性モーメント(I1 )と、被験者2の足の重量(mg)に由来する慣性モーメント(I2 )とが作用する。従って、この測定モデルにおける力学式を示すと、以下の式(1)の如くとなる。なお図8では、軸受55で支持される各部材を代表して、フットプレート10のみを示している。
【0048】
(式1)

【0049】
上記式(1)のうち、τはトルクメータ60の実測値、θはジャイロセンサ15の実測値である。フットプレート10の質量(M)、フットプレート10の重心(G1)からフットプレート10の回転中心までの距離(L1)は、常に変わることの無い既知の値である。本実施例の測定装置1には、被験者2の足の質量(m)、およびCOPである(G2 )の位置を計測するためのフォースプレートを使用していない。これは、フォースプレートの重量による慣性モーメント(I2 )の増加を防ぎ、さらに(I2 )の増加に伴う被験者2の足に対する負荷を低減させて安全性を向上させるためである。しかし、被験者2の足の質量(m)は、実質的に下腿部と足先2aの質量であるので、当該質量(m)は、足(下腿部と足先2a)の被験者2の身体重に占める割合から算出できる。すなわち、人間の身体重に占める足の重量の割合は凡そ決まっているため、足の質量(m)は、被験者2の身長および体重データから推定可能な値である。また、COPである(G2 )の位置は、足のサイズから推定可能である。従って、(G2 )からフットプレート10の回転中心までの距離(L2 )も推定可能な値である。
以上のように、式(1)は、弾性係数(k)、粘性係数(d)の二つの未知の値を含むものとなる。
【0050】
次に、上記式(1)を微分の差分近似により離散化して(θ)のみの式に変換し、当該式に所定のサンプリング間隔毎で得られた実測値(θ)(τ)を当てはめて、n個の角度データおよびトルクデータを取得する。ここで、上記式(1)を微分の差分近似により離散化すると以下の式(2)の如くとなる。式(3)は、式(2)をまとめたものである。
【0051】
(式2)
【0052】
(式3)
【0053】
最後に、疑似逆行例を用いた最小二乗法により、式(3)に含まれる誤差成分を最小にすることで、弾性係数(k)、粘性係数(d)を算出することができる。なお、フットプレート10を前後方向に延びる第1回転軸30のまわりに揺動させる測定と、上下方向に延びる第3回転軸70のまわりに揺動させる測定においても、上記と同様の方法で弾性係数(k)および粘性係数(d)を算出することができる。
【0054】
上記の測定方法では、足の質量(m)、および(G2 )からフットプレート10の回転中心までの距離(L2 )は被験者2の身長および体重データから推定したが、式(1)における、弾性係数(k)、粘性係数(d)、および足の質量(m)と距離(L2 )を掛け合わせた数値(L2 m)の三つの未知の値を含むものとして算出しても良い(図9参照)。ここで、(L2 m)を一つの値としたのは、(L2 )または(m)の個々の値のみを用いての計算が式中にないためである。取得した角度データおよびトルクデータから、疑似逆行例を用いた最小二乗法により、式(3)に含まれる誤差成分を最小にすることで、弾性係数(k)、粘性係数(d)および足の質量とフットプレート10の回転中心までの距離を掛け合わせた数値(L2 m)を算出することができる。以上のように、図9に示す測定方法であっても、弾性係数(k)、粘性係数(d)を算出することができる。
【0055】
上記の実施例以外に、足先固定具11は、面ファスナーを設けた左右一対のバンドなどで構成することができる。各回転軸30・50・70に角度センサを設けて、角度検出手段15を構成することができる。本発明は、左右両方の足先2a・2aをフットプレート10に載せる形態の足首インピーダンスの測定装置にも適用することができる。
【符号の説明】
【0056】
1 足首インピーダンスの測定装置
2 被験者
2a 被験者の足先
2b 被験者の踝
10 フットプレート
11 足先固定具
12 第1駆動部
13 第2駆動部
14 第3駆動部
15 角度検出手段(ジャイロセンサ)
30 第1回転軸
38 第1駆動部の駆動源(ギヤードモータ)
39 第1駆動部の伝動機構
40 第1駆動部のトルク検出手段(トルクメータ)
50 第2回転軸
58 第2駆動部の駆動源(ギヤードモータ)
59 第2駆動部の伝動機構
60 第2駆動部のトルク検出手段(トルクメータ)
70 第3回転軸
78 第3駆動部の駆動源(ギヤードモータ)
79 第3駆動部の伝動機構
80 第3駆動部のトルク検出手段(トルクメータ)
【技術分野】
【0001】
本発明は、足首のインピーダンス(足首の粘弾性係数)を測定するための測定装置に関する。
【背景技術】
【0002】
本発明に係る測定装置は、足首の弾性係数および粘性係数などのインピーダンスを測定することを目的とするが、足首の弾性係数を測定する装置自体は、非特許文献1、2などに開示されており公知である。
【0003】
非特許文献1に記載の測定装置では、倒立振り子に連結されて、水平軸まわりに揺動可能に構成されたフットプレート上に被験者を立たせたうえで、被験者に所定のトルクの発生を求め、さらに倒立振り子を所定角度に倒すように求める。そして、測定されたトルクと角度から足首の弾性係数を算出している。
【0004】
非特許文献2に記載の測定装置では、サーボモータに連結されて、水平軸まわりに揺動可能に構成されたフットプレート上に被験者を立たせたうえで、所定角度範囲(−0.5°〜+0.5°)で被験者の足先が上下動するようにフットプレートを駆動揺動させる。つまり、非特許文献2に記載の装置では、上記角度範囲に対応した短周期(1秒)のパルスをサーボモータに与えて、被験者の足先にパルス刺激を与えており、測定後の床反力(フットプレートに対する反力)の加わる圧の中心位置(COP)と足首との距離を測定し、COPの位置からトルクを算出し、さらに足首の弾性係数を算出している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】Loram.D and LakieM,"Direct measurement of human ankle stiffness during quiet standing:The intrinsic mechanical stiffness is insufficient for stability.",Journal of Physiology,545.3,pp.1041-1053(2002)
【非特許文献2】Casadio M,Morasso P and Sanguineti V,"Direct measurement of ankle stiffness during quiet standing: implications for control modering and clinical application",Gait&posture,21pp.410-424(2004)
【発明の概要】
【発明が解決しようとする課題】
【0006】
これら非特許文献1、2に開示された測定装置では、静止立位姿勢の身体動揺は、倒立振り子の運動と同等であるという見解に基づき、フットプレート上に立たせた被験者に対して測定を行い、その測定結果から足首の弾性係数を求めている。しかし、このように被験者を立位姿勢としたうえで測定を行う方法では、足首により全身の体重が受け止められた状態で測定を行うため、得られた弾性係数が全身の関節等による力の影響を受けて、真に純粋な足首を中心とした弾性係数を得ることは不可能であった。すなわち、非特許文献1、2に開示された測定装置では、得られた弾性係数の値が、被験者の体重、或いは平衡を保つための被験者の全身の関節や筋力を使った体重移動など、種々の要因により左右されやすく、正確に足首の弾性係数の値を得ることは困難であった。
【0007】
加えて、足首を含む人間の骨格筋は、非常に大きな力を発生させることが可能なアクチュエータと考えることができ、しかも単に力を発生させるだけではなく、バネ、ダンパのような粘弾性も併せ持っている。このことは、骨格筋を活動させると筋は硬くなり、逆に力を抜いてリラックスすると柔らかくなることからも明らかである。従って、例えば立位姿勢時における身体平衡維持のメカニズム解明には、足首の弾性係数のみならず、足首の粘性係数についても勘案することが必要であるが、上記非特許文献1では、弾性係数のみを測定しており、粘性係数の測定には至っておらず、その点にも改良の余地があった。また、上記非特許文献2においても、粘性に着目はしているものの立位において測定しており上体の影響を考慮しておらず、その点に改良の余地があった。
【0008】
本発明は、以上のような従来の測定装置の抱える問題を解決するためになされたものであり、より正確に弾性係数および粘性係数(以下、これら粘弾性係数をインピーダンスと記す。)を求めることができる、新規な足首インピーダンスの測定装置を得ることを目的とする。
【課題を解決するための手段】
【0009】
本発明者等は、被験者を座位姿勢としたうえで測定を行えば、より正確に足首のトルクの測定が可能であり、加えて、測定された足首のトルクに基づいて、より正確に足首の弾性係数のみならず、粘性係数の計測が可能となることを見出して、本発明を完成するに至った。
【0010】
すなわち本発明は、足首インピーダンスの測定装置を対象とする。この測定装置は、着座姿勢における被験者2の足先2aが載せられるフットプレート10と、フットプレート10上に載せられた被験者2の足先2aを固定するための足先固定具11と、前後方向に延びる第1回転軸30まわりにフットプレート10を揺動回転させる第1駆動部12と、左右方向に延びる第2回転軸50まわりにフットプレート10を揺動回転させる第2駆動部13と、上下方向に延びる第3回転軸70まわりにフットプレート10を揺動回転させる第3駆動部14と、揺動回転時のフットプレート10の角度を検出するための角度検出手段15とを備える。各駆動部12・13・14は、回転軸30・50・70を介してフットプレート10に駆動回転力を付与する駆動源38・58・78と、駆動源38・58・78の駆動力を回転軸30・50・70に伝える伝動機構39・59・79とを備える。回転軸30・50・70のそれぞれに、フットプレート10の揺動回転時に回転軸30・50・70に作用するトルクを検出するためのトルク検出手段40・60・80を設ける。そして、被験者2の踝2bが各回転軸30・50・70の軸心上に位置するように、足先固定具11で被験者2の足先2aを固定し、かかる足先2aの固定状態で、駆動源38・58・78を駆動してフットプレート10を回転軸30・50・70まわりに揺動回転駆動して、足先2aを強制的に姿勢変位させ、足先2aを姿勢変位させた際のトルク検出手段40・60・80による検出値と、角度検出手段15による検出値に基づいて、足首の粘弾性係数を算出することを特徴とする。なお、本明細書および特許請求の範囲において、前後、左右、上下の各方向は、フットプレート10に足先2aを載せた状態の被験者2から見た方向を意味する。
【0011】
被験者2の一方の脚の足先2aをフットプレート10に載せて、当該一方の脚の足首インピーダンスを測定する構成を採ることができる。
【0012】
角度検出手段は、フットプレート10に設けたジャイロセンサ15で構成することができる。
【0013】
具体的には、足先固定具11は、フットプレート10上に載せられた被験者2の足先2aを包む固定バッグ22と、固定バッグ22に接続された吸引手段24とを備える。固定バッグ22は、内部に気密空間を有するバッグ本体25と、バッグ本体25の気密空間内に収納された多数のビーズ26とを備える。被験者2の足先2aを固定バッグ22で包んでから、吸引手段24でバッグ本体25の気密空間内の空気を抜くことにより、固定バッグ22を足先2aに密着した状態で保形させて、足先2aをフットプレート10に固定する。
【発明の効果】
【0014】
本発明によれば、下肢の筋肉が力を発揮していない座位状態で足首のインピーダンスを計測するので、従来の非特許文献1、2に記載の計測装置に比べて、より正確に足首のトルクを計測し、該トルクから足首の粘弾性係数を的確に得ることができる。すなわち、人は立位状態で姿勢を維持しようとすると、脚部だけでなく、身体全体を用いてバランスを取ろうとする。その為、非特許文献1、2に記載の計測装置のように、立位姿勢で足首のトルクを測定するものでは、得られた値は、他の関節、特に上半身の関節の影響を受けた値となることが避けられない。これに対して、本発明のように被験者を座位姿勢にしたうえで計測を行うと、上半身による姿勢を維持しようとする要因を完全に排除することができるため、より正確に足首の粘弾性係数を計測することができる。また、高齢者や治療中の患者に対して、立位姿勢で足首のインピーダンスを測定することは被験者の負担が大きく、そもそも測定自体が困難となるおそれがあるが、本発明に係る装置を用いれば、座位姿勢で測定を行うことができるため、被験者の負担を大きく軽減することができる。
【0015】
被験者2の足先2aをフットプレート10に載せたときに、被験者2の踝2bが、フットプレート10の揺動回転中心となる各回転軸30・50・70の軸心とずれていると、フットプレート10の回転に伴って、足の踵の位置が前後にずれる。このため、被験者2の下腿部が揺れ動くことが避けられず、下腿部の筋力が足先2aを介してフットプレート10に加わり(下肢の筋肉が力を発揮し)、正確に足首の粘弾性係数を測定することが困難となる。これに対して、本発明のように、被験者2の踝2bを各回転軸30・50・70の軸心上に位置させていると、フットプレート10の回転に伴って被験者2の下腿部が動くことは無く、該下腿部の筋力(下肢の筋力)の影響を排除して、より正確に足首の粘弾性係数を測定することができる。
【0016】
以上のような本発明に係る計測装置によって計測された足首の粘弾性係数は、例えば、高齢者の転倒事故の防止等に貢献し得る極めて有用な情報として利用することができる。すなわち、身体の各部位を異なった速さで動かすと、重心の位置は刻一刻と変化するが、それにもかかわらずバランスを崩すことなく立っていられるのは平衡機能の働きによるものである。この平衡機能は、高齢になると平常に働かなくなり、高齢者(総務省で定義されている65歳以上の方を示す)における転倒の主な原因となっている。また、平衡機能は、身体を支える支点となる足圧中心(center of presser:COP)の動きにより管理されており、足首のインピーダンス(粘弾性)特性によって大きな影響を受ける。従って、足首の粘弾性係数を正確に計測することができれば、被験者の平衡機能の低下度合いの推測が可能となり、転倒事故等の発生を未然に防ぐことが可能となる。また、足首の粘弾性係数を正確に計測することができれば、医学的リハビリテーションの現場において、平衡機能の回復具合を定量的に評価することも可能となる。
【0017】
また本発明では、前後方向に延びる第1回転軸30と、左右方向に延びる第2回転軸50と、上下方向に延びる第3回転軸70とのまわりに、フットプレート10を揺動回転させることができる。しかも、第1〜第3の回転軸30・50・70に対応する第1〜第3の駆動部12〜14を、駆動源38・58・78および伝動機構39・59・79で独立に駆動させて、各回転軸30・50・70まわりの駆動回転力をフットプレート10に対して独立に付与することができる。さらに、回転軸30・50・70のそれぞれにトルク検出手段40・60・80を設けたので、フットプレート10の揺動回転時に各回転軸30・50・70に作用するトルクを個別に検出することができる。従って、本発明によれば、前後方向の回転軸まわりの足首のインピーダンスと、左右方向の回転軸まわりの足首のインピーダンスと、上下方向の回転軸まわりの足首のインピーダンスという、3方向の足首のインピーダンスを一つ測定装置で測定することができる。一回のフットプレートへの足の固定作業で、3方向のインピーダンスの測定が可能であり、迅速に測定作業を進めることができる点でも優れている。
【0018】
水平な回転軸を1つだけ持つ測定装置でも、被験者(足先)に対して測定装置(フットプレート)を90°回転させれば、フットプレートを前後軸まわりに揺動回転させる測定と、左右軸まわりに揺動回転させる測定とを行うことはできるが、一度フットプレートから足先を離し、被験者もしくは測定装置を移動させてから、再度足先をフットプレートに固定するという手間が生じる。その点、本発明に係る測定装置によれば、前後方向に延びる第1回転軸30と、左右方向に延びる第2回転軸50とを個別に備えるので、フットプレート10に足先2aを固定したまま、フットプレート10を前後軸まわりに揺動回転させる測定と、左右軸まわりに揺動回転させる測定とを続けて行うことができる。
【0019】
被験者2の一方の脚の足先2aをフットプレート10に載せて、当該一方の脚の足首インピーダンスを測定する測定装置によれば、左右の脚の足首インピーダンスが異なる場合に、左右それぞれの足首インピーダンスを正確に測定することができる。すなわち、一方の足首が曲がりやすく、他方の足首が曲がりにくい被験者2の両足をフットプレート10に載せると、フットプレート10を揺動させるときに、曲がりにくい足首が大きな抵抗となるため、曲がりやすい足首のインピーダンスを正確に測定することはできない。これに対して本発明のように、一方の足先2aだけをフットプレート10に載せるようにすると、一方の脚の足首インピーダンスを測定する際に、他方の脚の影響を排除して、正確な測定を行うことができる。
【0020】
フットプレート10の角度検出手段を、フットプレート10に設けたジャイロセンサ15で構成すると、第1〜第3の回転軸30・50・70のいずれのまわりにフットプレート10を揺動させた場合にも、1つのジャイロセンサ15だけでフットプレート10の角度を測定することができる。ジャイロセンサ15を用いると、各回転軸30・50・70に角度検出手段を設ける場合に比べて、コストを削減することができる。
【0021】
気密空間にビーズ26が収納されたバッグ本体25で固定バッグ22を構成し、気密空間内の空気を吸引手段24で排除して、足先2aをフットプレート10に固定する足先固定具11によれば、フットプレート10上における足先2aの位置調整が容易となり、しかも、調整後の位置で足先2aを確りと固定することが可能となる。すなわち、吸引手段24で空気を吸引する前の固定バッグ22は、足先2aの動きに合わせて容易に変形するので、足先2aを固定バッグ22で包んでから足先2aを動かして、踝2bを各回転軸30・50・70の軸心上に位置させることができる。足先2aの位置を調整した後、バッグ本体25の気密空間内の空気を抜くと、固定バッグ22が足先2aに密着し、さらに、気密空間内のビーズ26どうしが密着して、固定バッグ22が密着姿勢で保形されるので、足先2aを調整後の位置に確りと固定することができる。このように、被験者2の踝2bが各回転軸30・50・70の軸心上に位置する状態で、足先2aを確りと固定できると、足首インピーダンスの測定精度を向上することができる。また、本発明に係る足先固定具11は、被験者2の足先2aのサイズとは無関係に適用することができるので、足先2aのサイズごとに足先固定具を用意する場合に比べてコストを削減することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の足首インピーダンスの測定装置の装置本体の縦断側面図である。
【図2】測定装置の縦断正面図である。
【図3】測定装置の一部の分解斜視図である。
【図4】足先固定具の使用方法を説明するための図であり、(a)が足先の固定前、(b)が足先の固定後を示している。
【図5】本発明の測定装置の回路構成を説明するためのブロック図である。
【図6】足首インピーダンスの算出方法を模式的に示す図である。
【図7】トルクの設定値、実測角度値、およびトルクメータの実測値の経時的変化を説明するための図である。
【図8】インピーダンス測定モデルを示す図である。
【図9】別の足首インピーダンスの算出方法を模式的に示す図である。
【発明を実施するための形態】
【0023】
(実施例) 本発明に係る足首インピーダンスの測定装置について、図1乃至図5を参照して詳細に説明する。本実施例に係る測定装置1は、被験者が座った状態で、弾性係数(k)および粘性係数(d)といった、被験者の足首のインピーダンス(粘弾性係数)を測定するものである。図1に示すように測定装置1は、装置本体4と、装置本体4を制御する制御部5とで構成される。装置本体4は、被験者2の足先2aが載せられるフットプレート10と、フットプレート10上に載せられた足先2aを固定するための足先固定具11と、フットプレート10を揺動回転させる第1〜第3の駆動部12〜14と、揺動回転時のフットプレート10の角度を検出するためのジャイロセンサ(角度検出手段)15などで構成される。制御部5はパーソナルコンピュータなどで構成される。なお、上述のように、本実施例における前後、左右、上下の各方向は、フットプレート10に足先2aを載せた状態の被験者2から見た方向を意味し、その方向を図3に示す。
【0024】
図1および図3に示すようにフットプレート10は、被験者2の足裏が接する前後に長い矩形板状の底壁20と、底壁20の前後端に立設された前後側壁21・21とを備える逆門形に形成されており、底壁20の下面にジャイロセンサ15が取り付けられている。本実施例に係る測定装置1は、被験者2の足首のインピーダンスを左右別々に測定するものであり、フットプレート10には左右一方の足先2aだけが載せられる。底壁20の前後寸法は40cm、左右寸法は15cmに設定されている。
【0025】
図4に示すように足先固定具11は、フットプレート10の底壁20上で足先2aを包む固定バッグ22と、固定バッグ22にチューブ23を介して接続された真空ポンプ(吸引手段)24とを備える。固定バッグ22は、ポリウレタンシートなどで構成されて内部に気密空間を有するバッグ本体25と、バッグ本体25の気密空間内に収納された多数の合成樹脂製のビーズ26とを備える。バッグ本体25の一個所には、バッグ本体25の気密空間とチューブ23とを連通する吸引口27が設けられており、チューブ23における吸引口27と真空ポンプ24の間にはバルブ28が設けられている。
【0026】
被験者2の足先2aをフットプレート10に固定するときは、図4(a)に示すように足先2aを固定バッグ22で包んでから、真空ポンプ24でバッグ本体25の気密空間内の空気を抜き、バルブ28を閉じる。これにより、図4(b)に示すように固定バッグ22が足先2aに密着し、さらに、バッグ本体25内のビーズ26どうしが密着して、固定バッグ22が足先2aに密着した姿勢で保形されるので、足先2aをフットプレート10に固定することができる。なお、被験者2の踝2bは、固定バッグ22で覆うことなく露出させるようにする。
【0027】
図1および図3に示すようにフットプレート10は、前後方向に延びる一対の第1回転軸30・30を介して、第1支持枠31で支持されている。つまり、フットプレート10は、その上面が右斜め上方向に指向する右傾斜姿勢と、その上面が左斜め上方向に指向する左傾斜姿勢との間で、第1回転軸30・30のまわりに揺動回転可能に構成されている。第1支持枠31は、フットプレート10の下方に配置された前後に長い板状の底壁32と、底壁32の前後端に立設された前後側壁33・33と、底壁32の左右端の前後方向中途部に立設された左右側壁34・34とを備える。第1回転軸30の一端(基端)はフットプレート10の前後側壁21に固定されており、第1回転軸30の他端(突端)は、第1支持枠31の前後側壁33に設けた軸受35で回転自在に支持されている。
【0028】
前後一方(本実施例では後側)の第1回転軸30に、フットプレート10を第1回転軸30のまわりに揺動回転させるための第1駆動部12が連結されている。図1に示すように第1駆動部12は、ギヤードモータ(駆動源)38と、ギヤードモータ38の駆動力を第1回転軸30に伝える伝動機構39とを備える。伝動機構39は、ギヤードモータ38の出力軸42に固定された原動プーリ43と、第1回転軸30に固定された従動プーリ44と、両プーリ43・44の間に巻き掛けられたタイミングベルト45とで構成される。ギヤードモータ38の駆動力は、出力軸42から原動プーリ43、タイミングベルト45、および従動プーリ44を順に介して、第1回転軸30へ伝達される。ギヤードモータ38は、第1支持枠31の底壁32の下面に立設した取付板46で支持されている。底壁32には、タイミングベルト45を挿通するための通口47が形成されている。
【0029】
第1回転軸30におけるフットプレート10の後側壁21と従動プーリ44との間に、トルクメータ(トルク検出手段)40が配置されている。ギヤードモータ38を駆動して第1回転軸30まわりにフットプレート10を揺動回転させたときに、第1回転軸30に作用するトルクを、トルクメータ40で計測することができる。
【0030】
図2および図3に示すように第1支持枠31は、左右方向に延びる一対の第2回転軸50・50を介して、第2支持枠51で支持されている。つまり、第1支持枠31は、第2支持枠51に対して第2回転軸50・50のまわりに揺動回転させることができる。第1支持枠31を第2回転軸50のまわりに揺動回転させると、フットプレート10が第1支持枠31と一体に揺動回転する。つまり、フットプレート10は、その上面が前方上方向に指向する前傾斜姿勢と、その上面が後方上方向に指向する後傾斜姿勢との間で、第2回転軸50・50のまわりに揺動回転可能に構成されている。第2支持枠51は、第1支持枠31の下方に配置された左右に長い矩形板状の底壁52と、底壁52の左右端に立設された左右側壁54・54とを備える。第2回転軸50の一端(基端)は第1支持枠31の左右側壁34に固定されており、第2回転軸50の他端(突端)は、第2支持枠51の左右側壁54に設けた軸受55で回転自在に支持されている。
【0031】
左右一方(本実施例では右側)の第2回転軸50に、第1支持枠31を第2回転軸50のまわりに揺動回転させるための第2駆動部13が連結されている。図2に示すように第2駆動部13は、ギヤードモータ(駆動源)58と、ギヤードモータ58の駆動力を第2回転軸50に伝える伝動機構59とを備える。伝動機構59は、ギヤードモータ58の出力軸62に固定された原動プーリ63と、第2回転軸50に固定された従動プーリ64と、両プーリ63・64の間に巻き掛けられたタイミングベルト65とで構成される。ギヤードモータ58の駆動力は、出力軸62から原動プーリ63、タイミングベルト65、および従動プーリ64を順に介して、第2回転軸50へ伝達される。ギヤードモータ58は、第2支持枠51の底壁52の上面に立設した取付板66で支持されている。
【0032】
第2回転軸50における第1支持枠31の右側壁34と従動プーリ64との間に、トルクメータ(トルク検出手段)60が配置されている。ギヤードモータ58を駆動して、第2回転軸50まわりに第1支持枠31をフットプレート10と一体に揺動回転させたときに、第2回転軸50に作用するトルクを、トルクメータ60で計測することができる。
【0033】
図2に示すように第2支持枠51は、上下方向に延びる第3回転軸70と連結されており、水平姿勢で配置された矩形板状のテーブル71で下側から支持されている。つまり、第2支持枠51は、テーブル71に対して第3回転軸70のまわりに揺動回転させることができる。第2支持枠51を第3回転軸70のまわりに揺動回転させると、第1支持枠31およびフットプレート10が第2支持枠51と一体に揺動回転する。換言すれば、つまり、フットプレート10は、水平姿勢を維持したままで、その前端が時計方向に回転された右回転姿勢と、その前端が反時計方向に回転された左回転姿勢との間で、第3回転軸70まわりに揺動回転可能に構成されている。
【0034】
テーブル71は、床面に載置されたベース72の上面側に固定されている。第2支持枠51の底壁52の下面側には、円筒状の連結ボス73が固定されており、この連結ボス73の中心軸線は第3回転軸70の軸心と一致する。テーブル71の上面と連結ボス73の外周面とが、上下方向を回転軸方向とするベアリング74で連結されている。つまり、第2支持枠51は、テーブル71に対して相対回転自在に、ベアリング74を介してテーブル71で支持されている。ここでのベアリング74は、回転軸方向に働く力を受け止めるスラストベアリングである。
【0035】
第3回転軸70の上端(基端)は、第2支持枠51の底壁52の下面に連結固定されている。第3回転軸70の下端(突端)に、第2支持枠51を第3回転軸70のまわりに揺動回転させるための第3駆動部14が連結されている。第3駆動部14は、ギヤードモータ(駆動源)78と、ギヤードモータ78の駆動力を第3回転軸70に伝える伝動機構79とを備える。伝動機構79は、ギヤードモータ78の出力軸82に固定された原動プーリ83と、第3回転軸70に固定された従動プーリ84と、両プーリ83・84の間に巻き掛けられたタイミングベルト85とで構成される。ギヤードモータ78の駆動力は、出力軸82から原動プーリ83、タイミングベルト85、および従動プーリ84を順に介して、第3回転軸70へ伝達される。ギヤードモータ78は、テーブル71の上面側に水平姿勢で固定した取付板86で支持されている。
【0036】
第3回転軸70における第2支持枠51の底壁52と従動プーリ84との間に、トルクメータ(トルク検出手段)80が配置されている。ギヤードモータ78を駆動して、第3回転軸70まわりに第2支持枠51を第1支持枠31およびフットプレート10と一体に揺動回転させたときに、第3回転軸70に作用するトルクを、トルクメータ80で計測することができる。テーブル71の中央には、第3回転軸70およびトルクメータ80を挿通するための通口87が形成されており、従動プーリ84はテーブル71とベース72の間に配されている。
【0037】
図5は、本実施例に係る測定装置1の回路構成を示すブロック図である。この測定装置1は、制御部5からの信号により、足先固定具11の真空ポンプ24およびバルブ28を操作して、被験者2の足先2aをフットプレート10に固定するとともに、各駆動部12〜14のギヤードモータ38・58・78を駆動して、フットプレート10を揺動操作する。後述する本実施例に係る測定方法では、第1駆動部12、第2駆動部13、第3駆動部14の順で、各ギヤードモータ38・58・78を個別に駆動する。また、この制御部5には、フットプレート10の揺動操作時において、各駆動部12〜14のトルクメータ40・60・80により検出されたトルクに関する検出結果、およびジャイロセンサ15により検出されたフットプレート10の角度に関する検出結果が送り込まれる。また制御部5は、トルクや角度の検出結果に基づいて、被験者2の足首の粘弾性係数を算出する。
【0038】
制御部5を構成するパーソナルコンピュータには、非常停止ボタン90が接続されている。被験者2が危険を感じたときに非常停止ボタン90を押圧操作すると、ギヤードモータ38・58・78の駆動が即時に停止されて、フットプレート10の回転が直ちに停止されるようになっている。非常停止ボタン90を設けることにより、フットプレート10が過剰に揺動回転されることに起因して、被験者2が足首を痛めることを防ぐことができる。非常停止ボタン90が押圧操作されてフットプレート10の回転が停止した後、フットプレート10が初期角度姿勢へ戻る方向にギヤードモータ38・58・78を駆動させるようにすると、被験者2の足首に対する負荷が大きい危険な状態を迅速に脱することができる。また、非常停止ボタン90に加えて、各回転軸30・50・70の回転限界を機械的に規定する規制機構を設けると、フットプレート10の過剰な揺動回転を確実に防止して、被験者2にとっての安全性をさらに向上することができる。
【0039】
次に、上記構成からなる測定装置1を使った足首インピーダンスの測定方法について、図6乃至図8を参照して説明する。かかる測定方法は、トルク(τ)と角度(θ)の測定(測定工程)と、これらトルク(τ)と角度(θ)のサンプルデータから最小二乗法を使った足首インピーダンス(弾性係数:k、粘性係数:d)の算出(算出工程)とに大別できる。
【0040】
測定工程においては、被験者2を椅子などに座らせてから、被験者2の足先2aを足先固定具11でフットプレート10に固定する。このとき、被験者2の踝2bが各回転軸30・50・70の軸心上に在るように、フットプレート10上における被験者2の足先位置を調整する。なお、足先2aを固定するのに加えて、被験者2の下腿部を椅子などに固定してもよい。
【0041】
次に、フットプレート10を所定の初期角度姿勢とする。具体的には制御部5が、ジャイロセンサ15からの検出信号を勘案しながら、各駆動部12〜14のギヤードモータ38・58・78を駆動して、フットプレート10を初期角度姿勢となるまで揺動操作する。初期角度姿勢は、例えばフットプレート10および第1支持枠31の底壁20・32が水平で、かつ、第2支持枠51の底壁52がテーブル71に対して捻れていない状態(底壁52とテーブル71の上下縁どうし、および左右縁どうしが平行である状態)とする。
【0042】
次に、第1駆動部12のギヤードモータ38を駆動して、フットプレート10を第1回転軸30のまわりに揺動させながら、第1回転軸30に作用するトルク(τ)、およびフットプレート10の角度(θ)を、第1駆動部12のトルクメータ40とジャイロセンサ15で計測する。ここで、フットプレート10の角度(θ)とは、フットプレート10の底壁20が第1支持枠31の底壁32に対してなす角度のことをいう。
【0043】
具体的には、フットプレート10を、上記の初期角度姿勢から所定の角度範囲(例えば±15°)で、所定のトルク(τ1 )を加えながらゆっくりと揺動させる。フットプレート10が初期角度姿勢から所定の角度範囲(±15°)で揺動されたのちに初期角度姿勢に戻るまでの間を1周期とし、この1周期が例えば1秒以上の長周期となるように、フットプレート10を揺動させる。図7にトルク設定値(τ1 )、実測角度値(θ)、トルクメータ40によるトルク実測値(τ)の時間変化の例を示す。本測定装置1では、1周期において数回から数千回の測定を行うことができる。また、測定は、数周期〜数十周期に亘って実行される。
【0044】
上記測定が終了すると、フットプレート10を初期角度姿勢に戻してから、フットプレート10を第2回転軸50のまわりに揺動させる測定を開始する。すなわち、第2駆動部13のギヤードモータ58を駆動して、第1支持枠31をフットプレート10とともに第2回転軸50のまわりに揺動させながら、第2回転軸50に作用するトルク(τ)、およびフットプレート10の角度(θ)を、第2駆動部13のトルクメータ60とジャイロセンサ15で計測する。ここで、フットプレート10の角度(θ)とは、フットプレート10の底壁20が第2支持枠51の底壁52に対してなす角度のことをいう。トルク(τ)と角度(θ)の具体的な測定方法は、上記測定と同様であるため、その説明を省略する。
【0045】
上記測定が終了すると、フットプレート10を初期角度姿勢に戻してから、フットプレート10を第3回転軸70のまわりに揺動させる測定を開始する。すなわち、第3駆動部14のギヤードモータ78を駆動して、第2支持枠51を第1支持枠31およびフットプレート10とともに第3回転軸70のまわりに揺動させながら、第3回転軸70に作用するトルク(τ)、およびフットプレート10の角度(θ)を、第3駆動部14のトルクメータ80とジャイロセンサ15で計測する。ここで、フットプレート10の角度(θ)とは、フットプレート10の底壁20の上下縁(あるいは左右縁)がテーブル71の上下縁(あるいは左右縁)に対してなす角度のことをいう。トルク(τ)と角度(θ)の具体的な測定方法は、上記測定と同様であるため、その説明を省略する。
【0046】
以上のように、本実施例では、フットプレート10を前後方向に延びる第1回転軸30のまわりに揺動させる測定と、左右方向に延びる第2回転軸50のまわりに揺動させる測定と、上下方向に延びる第3回転軸70のまわりに揺動させる測定との3つを行うが、もちろん測定の順序は任意である。また、必ずしも3つの測定を行う必要は無い。
【0047】
次の算出工程では、得られた実測角度(θ)とトルク実測値(τ)の値から、最小二乗法を使って弾性係数(k)と粘性係数(d)とを推定する(図6参照)。図8は、左右方向に延びる第2回転軸50のまわりにフットプレート10を揺動させる測定におけるインピーダンス測定モデルである。第2回転軸50には、測定時において、第2支持枠51に設けた軸受55で支持される各部材(第1支持枠31、フットプレート10等)の総重量(Mg)に由来する慣性モーメント(I1 )と、被験者2の足の重量(mg)に由来する慣性モーメント(I2 )とが作用する。従って、この測定モデルにおける力学式を示すと、以下の式(1)の如くとなる。なお図8では、軸受55で支持される各部材を代表して、フットプレート10のみを示している。
【0048】
(式1)
【0049】
上記式(1)のうち、τはトルクメータ60の実測値、θはジャイロセンサ15の実測値である。フットプレート10の質量(M)、フットプレート10の重心(G1)からフットプレート10の回転中心までの距離(L1)は、常に変わることの無い既知の値である。本実施例の測定装置1には、被験者2の足の質量(m)、およびCOPである(G2 )の位置を計測するためのフォースプレートを使用していない。これは、フォースプレートの重量による慣性モーメント(I2 )の増加を防ぎ、さらに(I2 )の増加に伴う被験者2の足に対する負荷を低減させて安全性を向上させるためである。しかし、被験者2の足の質量(m)は、実質的に下腿部と足先2aの質量であるので、当該質量(m)は、足(下腿部と足先2a)の被験者2の身体重に占める割合から算出できる。すなわち、人間の身体重に占める足の重量の割合は凡そ決まっているため、足の質量(m)は、被験者2の身長および体重データから推定可能な値である。また、COPである(G2 )の位置は、足のサイズから推定可能である。従って、(G2 )からフットプレート10の回転中心までの距離(L2 )も推定可能な値である。
以上のように、式(1)は、弾性係数(k)、粘性係数(d)の二つの未知の値を含むものとなる。
【0050】
次に、上記式(1)を微分の差分近似により離散化して(θ)のみの式に変換し、当該式に所定のサンプリング間隔毎で得られた実測値(θ)(τ)を当てはめて、n個の角度データおよびトルクデータを取得する。ここで、上記式(1)を微分の差分近似により離散化すると以下の式(2)の如くとなる。式(3)は、式(2)をまとめたものである。
【0051】
(式2)
【0052】
(式3)
【0053】
最後に、疑似逆行例を用いた最小二乗法により、式(3)に含まれる誤差成分を最小にすることで、弾性係数(k)、粘性係数(d)を算出することができる。なお、フットプレート10を前後方向に延びる第1回転軸30のまわりに揺動させる測定と、上下方向に延びる第3回転軸70のまわりに揺動させる測定においても、上記と同様の方法で弾性係数(k)および粘性係数(d)を算出することができる。
【0054】
上記の測定方法では、足の質量(m)、および(G2 )からフットプレート10の回転中心までの距離(L2 )は被験者2の身長および体重データから推定したが、式(1)における、弾性係数(k)、粘性係数(d)、および足の質量(m)と距離(L2 )を掛け合わせた数値(L2 m)の三つの未知の値を含むものとして算出しても良い(図9参照)。ここで、(L2 m)を一つの値としたのは、(L2 )または(m)の個々の値のみを用いての計算が式中にないためである。取得した角度データおよびトルクデータから、疑似逆行例を用いた最小二乗法により、式(3)に含まれる誤差成分を最小にすることで、弾性係数(k)、粘性係数(d)および足の質量とフットプレート10の回転中心までの距離を掛け合わせた数値(L2 m)を算出することができる。以上のように、図9に示す測定方法であっても、弾性係数(k)、粘性係数(d)を算出することができる。
【0055】
上記の実施例以外に、足先固定具11は、面ファスナーを設けた左右一対のバンドなどで構成することができる。各回転軸30・50・70に角度センサを設けて、角度検出手段15を構成することができる。本発明は、左右両方の足先2a・2aをフットプレート10に載せる形態の足首インピーダンスの測定装置にも適用することができる。
【符号の説明】
【0056】
1 足首インピーダンスの測定装置
2 被験者
2a 被験者の足先
2b 被験者の踝
10 フットプレート
11 足先固定具
12 第1駆動部
13 第2駆動部
14 第3駆動部
15 角度検出手段(ジャイロセンサ)
30 第1回転軸
38 第1駆動部の駆動源(ギヤードモータ)
39 第1駆動部の伝動機構
40 第1駆動部のトルク検出手段(トルクメータ)
50 第2回転軸
58 第2駆動部の駆動源(ギヤードモータ)
59 第2駆動部の伝動機構
60 第2駆動部のトルク検出手段(トルクメータ)
70 第3回転軸
78 第3駆動部の駆動源(ギヤードモータ)
79 第3駆動部の伝動機構
80 第3駆動部のトルク検出手段(トルクメータ)
【特許請求の範囲】
【請求項1】
着座姿勢における被験者(2)の足先(2a)が載せられるフットプレート(10)と、
前記フットプレート(10)上に載せられた被験者(2)の足先(2a)を固定するための足先固定具(11)と、
前後方向に延びる第1回転軸(30)まわりに前記フットプレート(10)を揺動回転させる第1駆動部(12)と、
左右方向に延びる第2回転軸(50)まわりに前記フットプレート(10)を揺動回転させる第2駆動部(13)と、
上下方向に延びる第3回転軸(70)まわりに前記フットプレート(10)を揺動回転させる第3駆動部(14)と、
揺動回転時の前記フットプレート(10)の角度を検出するための角度検出手段(15)と、
を備え、
前記各駆動部(12・13・14)は、前記回転軸(30・50・70)を介して前記フットプレート(10)に駆動回転力を付与する駆動源(38・58・78)と、該駆動源(38・58・78)の駆動力を前記回転軸(30・50・70)に伝える伝動機構(39・59・79)とを備えており、
前記回転軸(30・50・70)のそれぞれに、前記フットプレート(10)の揺動回転時に該回転軸(30・50・70)に作用するトルクを検出するためのトルク検出手段(40・60・80)が設けられており、
被験者(2)の踝(2b)が前記各回転軸(30・50・70)の軸心上に位置するように、前記足先固定具(11)で被験者(2)の足先(2a)を固定し、
かかる足先(2a)の固定状態で、前記駆動源(38・58・78)を駆動して前記フットプレート(10)を前記回転軸(30・50・70)まわりに揺動回転駆動して、足先(2a)を強制的に姿勢変位させ、
かかる足先(2a)を姿勢変位させた際の前記トルク検出手段(40・60・80)による検出値と、前記角度検出手段(15)による検出値に基づいて、足首の粘弾性係数を算出することを特徴とする足首インピーダンスの測定装置。
【請求項2】
被験者(2)の一方の脚の足先(2a)を前記フットプレート(10)に載せて、当該一方の脚の足首インピーダンスを測定する請求項1記載の足首インピーダンスの測定装置。
【請求項3】
前記角度検出手段が、前記フットプレート(10)に設けたジャイロセンサ(15)で構成されている請求項1又は2記載の足首インピーダンスの測定装置。
【請求項4】
前記足先固定具(11)が、前記フットプレート(10)上に載せられた被験者(2)の足先(2a)を包む固定バッグ(22)と、該固定バッグ(22)に接続された吸引手段(24)とを備えており、
前記固定バッグ(22)が、内部に気密空間を有するバッグ本体(25)と、該バッグ本体(25)の気密空間内に収納された多数のビーズ(26)とを備えており、
被験者(2)の足先(2a)を前記固定バッグ(22)で包んでから、前記吸引手段(24)で前記バッグ本体(25)の気密空間内の空気を抜くことにより、前記固定バッグ(22)を足先(2a)に密着した状態で保形させて、足先(2a)を前記フットプレート(10)に固定する請求項1乃至3のいずれかに記載の足首インピーダンスの測定装置。
【請求項1】
着座姿勢における被験者(2)の足先(2a)が載せられるフットプレート(10)と、
前記フットプレート(10)上に載せられた被験者(2)の足先(2a)を固定するための足先固定具(11)と、
前後方向に延びる第1回転軸(30)まわりに前記フットプレート(10)を揺動回転させる第1駆動部(12)と、
左右方向に延びる第2回転軸(50)まわりに前記フットプレート(10)を揺動回転させる第2駆動部(13)と、
上下方向に延びる第3回転軸(70)まわりに前記フットプレート(10)を揺動回転させる第3駆動部(14)と、
揺動回転時の前記フットプレート(10)の角度を検出するための角度検出手段(15)と、
を備え、
前記各駆動部(12・13・14)は、前記回転軸(30・50・70)を介して前記フットプレート(10)に駆動回転力を付与する駆動源(38・58・78)と、該駆動源(38・58・78)の駆動力を前記回転軸(30・50・70)に伝える伝動機構(39・59・79)とを備えており、
前記回転軸(30・50・70)のそれぞれに、前記フットプレート(10)の揺動回転時に該回転軸(30・50・70)に作用するトルクを検出するためのトルク検出手段(40・60・80)が設けられており、
被験者(2)の踝(2b)が前記各回転軸(30・50・70)の軸心上に位置するように、前記足先固定具(11)で被験者(2)の足先(2a)を固定し、
かかる足先(2a)の固定状態で、前記駆動源(38・58・78)を駆動して前記フットプレート(10)を前記回転軸(30・50・70)まわりに揺動回転駆動して、足先(2a)を強制的に姿勢変位させ、
かかる足先(2a)を姿勢変位させた際の前記トルク検出手段(40・60・80)による検出値と、前記角度検出手段(15)による検出値に基づいて、足首の粘弾性係数を算出することを特徴とする足首インピーダンスの測定装置。
【請求項2】
被験者(2)の一方の脚の足先(2a)を前記フットプレート(10)に載せて、当該一方の脚の足首インピーダンスを測定する請求項1記載の足首インピーダンスの測定装置。
【請求項3】
前記角度検出手段が、前記フットプレート(10)に設けたジャイロセンサ(15)で構成されている請求項1又は2記載の足首インピーダンスの測定装置。
【請求項4】
前記足先固定具(11)が、前記フットプレート(10)上に載せられた被験者(2)の足先(2a)を包む固定バッグ(22)と、該固定バッグ(22)に接続された吸引手段(24)とを備えており、
前記固定バッグ(22)が、内部に気密空間を有するバッグ本体(25)と、該バッグ本体(25)の気密空間内に収納された多数のビーズ(26)とを備えており、
被験者(2)の足先(2a)を前記固定バッグ(22)で包んでから、前記吸引手段(24)で前記バッグ本体(25)の気密空間内の空気を抜くことにより、前記固定バッグ(22)を足先(2a)に密着した状態で保形させて、足先(2a)を前記フットプレート(10)に固定する請求項1乃至3のいずれかに記載の足首インピーダンスの測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−78422(P2013−78422A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−219185(P2011−219185)
【出願日】平成23年10月3日(2011.10.3)
【出願人】(504150450)国立大学法人神戸大学 (421)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【出願人】(390041162)株式会社飛鳥電機製作所 (6)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月3日(2011.10.3)
【出願人】(504150450)国立大学法人神戸大学 (421)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【出願人】(390041162)株式会社飛鳥電機製作所 (6)
【Fターム(参考)】
[ Back to top ]